Epu
4
COLEGIO NICOLAS ESGUERRA EVALUACION PERIODICA UNFICADA DE INFORMATICA SEGUNDO PERIODO LA TECOLOGIA DEL FUTURO 1. LEGO MINSTROMS EDUCATION CONTIENE UN AVANZADO LADRILLO NXT DE 32 BITS CANTROLADO POR ORDENADOR, SERVOMOTORES INTERACTIVOS, SENSORES DE SONIDO, ULTRASONICO Y DE OTROS TIPOS, LADRILLOS DE COMUNICACIÓN BLUETOOTH,MULTIPLES FUNCIONES DE DESCARGA Y REGISTRO DE DATOS. EL SOFWARE LEGO MINSTROM EDUCATION NXT BASADO EN ICONOS ESTA CONSTRUIDO SOBRE EL SOFWARE DE LA LABVIEW THE NATHIONAL INSTRUMENTS, UN ESTANDAR DE L INDUSTRIA CON APLICACIONES EN MUCHOS CAMPOS DE LA INGIENERIA Y LA INVESTIGACION. C LA INDUSTRIA TIENE APLICACIONES EN IGENIERIA INVESTIGACION GRACIAS AL SOFWARE. 2. SEPROPORCIONAN INSTRUCCIONES ESPECIFICAS PARA CONSTRUIR UN ROBOT. TAMBIEN HAY PROPORCIONES DE CONSTRUCCION PARA EL MISMO ROBOT EN GUIA DE MONTAJE DEL NXT EN EL EQUIPO DE BASE NUMERO 9797 Y EN EL ROBOT EDUCADOR, QUE ES PARTE DEL SOFWARE LEGO MINSTROM EDUCATION NXT. C LAS INSTRUCCIONES NECESARIAS PARA CONSTRUIR UN ROBOT SE PUEDEN ENCONTRAR EN LA CAJA 9797 O EN EL ROBOT EDUCADOR. 3. PROGRAME SU ROBOT UTILIZANDO EL SOFWARE LEGO MINSTROM EDUCATION NXT. SE INCLUYE MUCHOS
-
Upload
ricardo901 -
Category
Education
-
view
84 -
download
0
Transcript of Epu
COLEGIO NICOLAS ESGUERRAEVALUACION PERIODICA UNFICADA DE INFORMATICA SEGUNDO
PERIODO
LA TECOLOGIA DEL FUTURO
1. LEGO MINSTROMS EDUCATION CONTIENE UN AVANZADO LADRILLO NXT DE 32 BITS CANTROLADO POR ORDENADOR, SERVOMOTORES INTERACTIVOS, SENSORES DE SONIDO, ULTRASONICO Y DE OTROS TIPOS, LADRILLOS DE COMUNICACIÓN BLUETOOTH,MULTIPLES FUNCIONES DE DESCARGA Y REGISTRO DE DATOS. EL SOFWARE LEGO MINSTROM EDUCATION NXT BASADO EN ICONOS ESTA CONSTRUIDO SOBRE EL SOFWARE DE LA LABVIEW THE NATHIONAL INSTRUMENTS, UN ESTANDAR DE L INDUSTRIA CON APLICACIONES EN MUCHOS CAMPOS DE LA INGIENERIA Y LA INVESTIGACION.
C LA INDUSTRIA TIENE APLICACIONES EN IGENIERIA INVESTIGACION GRACIAS AL SOFWARE.
2. SEPROPORCIONAN INSTRUCCIONES ESPECIFICAS PARA CONSTRUIR UN ROBOT. TAMBIEN HAY PROPORCIONES DE CONSTRUCCION PARA EL MISMO ROBOT EN GUIA DE MONTAJE DEL NXT EN EL EQUIPO DE BASE NUMERO 9797 Y EN EL ROBOT EDUCADOR, QUE ES PARTE DEL SOFWARE LEGO MINSTROM EDUCATION NXT.
C LAS INSTRUCCIONES NECESARIAS PARA CONSTRUIR UN ROBOT SE PUEDEN ENCONTRAR EN LA CAJA 9797 O EN EL ROBOT EDUCADOR.
3. PROGRAME SU ROBOT UTILIZANDO EL SOFWARE LEGO MINSTROM EDUCATION NXT. SE INCLUYE MUCHOS EJEMPLOS EN PARTE DEL ROBOT EDUCADOR DEL SOFWARE. DESCARGE SU PROGRAMA AL LADRILLO NXT CON LA CONECCION INALAMBRICA BLUTOOTH O CON UN CABLE USB.
B PARA DESCARGAR UN PROGRAMA SE PUEDE UTILIZAR UN CABLE USB O VIA BLUETOOTH AL NXT.
4. EJECUTE SU PROGRAMA. ¿QUE OCURRE? ¿SU ROBOT ACTUO COMO LO ESPERAVA? SI NO LO HIZO, AJUSTE SU ROBOT O SU PROGRAMA E INTENTELO NUEVAMENTE; A ESTE PROCESO SE LE LLAMA D PONER A PRUEBA
5. CONEXIÓN DE LOS SENSORES: LOS SENSORES PUEDEN CONECTARSE A CUALQUIER PUERTO DE ENTRADA NUMERADO DEL 1 AL 4. CUAL CABLE EXEPTO EL CABLE CONVERSOR PUEDE CONECTARSE PARA CONECTAR LOS SENSORE.B PUERTO 2: SENSOR ACUSTICO.
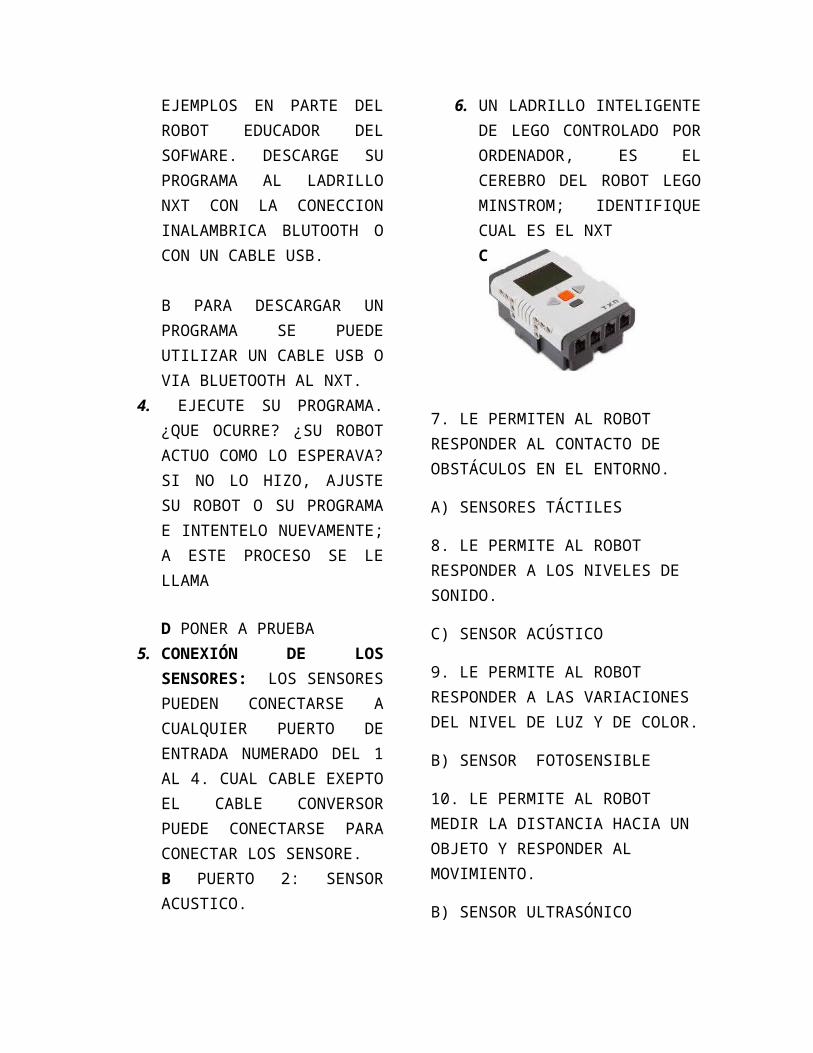
6. UN LADRILLO INTELIGENTE DE LEGO CONTROLADO POR ORDENADOR, ES EL CEREBRO DEL ROBOT LEGO MINSTROM; IDENTIFIQUE CUAL ES EL NXTC
7. LE PERMITEN AL ROBOT RESPONDER AL CONTACTO DE OBSTÁCULOS EN EL ENTORNO.
A) SENSORES TÁCTILES
8. LE PERMITE AL ROBOT RESPONDER A LOS NIVELES DE SONIDO.
C) SENSOR ACÚSTICO
9. LE PERMITE AL ROBOT RESPONDER A LAS VARIACIONES DEL NIVEL DE LUZ Y DE COLOR.
B) SENSOR FOTOSENSIBLE
10. LE PERMITE AL ROBOT MEDIR LA DISTANCIA HACIA UN OBJETO Y RESPONDER AL MOVIMIENTO.
B) SENSOR ULTRASÓNICO
11. PERMITE A LOS ROBOTS MOVERSE SUAVEMENTE Y CON PRECISIÓN EN UN ESPACIO.
B) SERVOMOTORES
CONEXIÓN DE LOS MOTORES Y LAS LÁMPARAS
LOS MOTORES Y LAS LÁMPARAS SE PUEDEN CONECTAR EN CUALQUIER PUERTO A, B O C. LA CONFIGURACIÓN PREDETERMINADA UTILIZADA PARA LOS PROGRAMAS DE PRUEBA EN EL NXT Y PARA MUCHOS PROGRAMAS DE MUESTRA EN EL ROBOT EDUCADOR ES LA SIGUIENTE:
PUERTO A: MOTOR O LÁMPARA PARA UNA FUNCIÓN EXTRA
PUERTO B: MOTOR PARA MOVIMIENTO; PARA UN CHASIS DE DOBLE MOTOR, GENERALMENTE ESTE ES EL LADO IZQUIERDO
PUERTO C: MOTOR PARA MOVIMIENTO; PARA UN ROBOT DE DOS MOTORES, GENERALMENTE ESTE ES EL LADO DERECHO.
12. SEGÚN LA LECTURA ANTERIOR LOS MOTORES Y LÁMPARAS SE DEBEN CONECTAR ASÍ:
A)
LAS SIGUIENTES IMÁGENES CORRESPONDEN A OPERADORES NXT ENUMERADOS DEL 1 AL 5 DE IZQUIERDA A DERECHA
13. EL SIGUIENTE OPERADOR MECÁNICO DE LA IMAGEN 1 CORRESPONDE A:
B) SERVOMOTOR
14. LA IMAGEN 4 CORRESPONDE A UN:
A) SENSOR TÁCTIL
15. LA IMAGEN 5 CORRESPONDE A UN :
D) SENSOR FOTOSENSIBLE
16. LA IMAGEN DOS CORRESPODE A UN
A SENSOR TACTIL
17. LA IMAGEN 3 CORRESPONDE A UN
C SENSOR ACUSTICO
18. LA IMAGEN ANTERIOR ES UNA REPRESENTACION DE LA FUNCION
B BLUETOOTH
19. LA MELOR DEFINICION PARA BLUETOOTH
D ES UNA TECNOLOGIA DE COMUNICACIÓN QUE HACE POSIBLE EL ENVIO Y RECEPCION DE DATOS SIN CABLES.
20 EXPRESE A MANERA DE ENSAYO COMO FUE SU EXPERIENCIA EN EL CURSO DE ROBOTICA NXT (MINIMO 10 RENGLONES CON BUENA LETRA Y REDACTACION; USE EL RESPALDO DE ESTA HOJA PARA TAL FIN).
ENSAYOFUE UNA GRAN EXPERIENCIA HABER APRNEDIDO A USAR, PROGRAMAR Y CONOCER SOBRE ESTE ROBOT; TAMBIEN APRENDI SOBRE SUS PARTES, SUS SENSORES COMO EL SENSOR TACTIL, EL SENSOR ACUSTICO, EL SENSOR FOTOSINTETICOY EL SENSOR ULTRASONICO ENTRE OTROS; TAMBIEN SOBRE SUS PARTES Y EL USO DE ELLOS COMO EL LADRLLO NXT, LAS LAMPARAS LOS SEVOMOTORES Y OTROS. ME HAN AYUDADO A GANAR MAS CONOCIMIENTOS Y PODER COMPRENDER MAS SOBRE ESTAS TECNOLOGIAS LAS QUE NOS SIRVEN PARA NUESTRA VIDA.