Estimacion Lineal EXCEL

of 8
-
Upload
alvarometro-presion-fija -
Category
Documents
-
view
26 -
download
0
description
Se trata de un documento que nos facilita las herramienta para poder trabajar excel con técnicas de ajustes lineales.
Transcript of Estimacion Lineal EXCEL
-
ESTIMACIN LINEAL DE ERROR CUADRTICO MEDIO MNIMO
MOTIVACIN: Los estimadores ptimos segn el criterio de Bayes son, en
general, funciones no lineales de las observaciones. Es necesario conocer la f.d.p. de la variable aleatoria dadas las
observaciones. Usando estimadores lineales (el estimador es combinacin lineal
de los datos):
Slo necesitamos los momentos de segundo orden.
El estimador se obtiene como solucin de un sistema de ecuaciones lineales.
PLANTEAMIENTO: Disponemos de un vector de observaciones: [ ]Nxxxx ,,,, 321 K=x
El estimador aproxima la variable aleatoria y por una
combinacin lineal de las observaciones:
=
= Ni
ii xay1
*
El criterio seguido es el de minimizacin del valor cuadrtico
medio del error de estimacin:
( )[ ]
=
=
2
1
2N
iii xayEeE
-
PRINCIPIO DE ORTOGONALIDAD El estimador lineal de error cuadrtico medio mnimo es el que
produce un error de estimacin que es ortogonal a los datos:
[ ] NkexExxayE kkNi
ii ==
=1 ;0
1
Demostracin: { }Niia 1= : vector de coeficientes del estimador lineal ptimo. { }Niia 1' = : vector de coeficientes de otro estimador lineal. { }Niix 1= : datos utilizados en la estimacin.
El error de estimacin con el nuevo estimador:
= = = =
=== Ni
N
i
N
i
N
iiiiiiiiiii xaaexaaxayxaye
1 1 1 1)'()'(''
Su valor cuadrtico medio:
( )[ ]
=
=
2
1
2 )'('N
iiii xaaeEeE
[ ] [ ]
+=
==
N
iiii
N
iiii xaaeExaaEeEeE
1
2
1
22 )'(2)'()'(
0)'(1
=
=
N
iiii xaaeE
( )[ ] ( )22' eEeE
CONCLUSIN: El valor cuadrtico medio mnimo se obtiene
cuando el error es ortogonal a los datos.
-
ECUACIONES NORMALES El principio de ortogonalidad permite obtener fcilmente los
coeficientes del estimador lineal de error cuadrtico medio mnimo.
[ ] NkexExxayE kkNi
ii ==
=1 ;0
1
[ ] [ ]=
=Ni
kkii NkyxExxEa1
1 ;
=
=Ni
yxixx NkRaR kki1
1 ;
Observacin:
El clculo de los coeficientes del estimador slo requiere informacin de los estadsticos de segundo orden en general, peor solucin que en el caso Bayesiano.
-
CONSIDERACIONES DE INTERS El error cuadrtico medio es la diferencia de los valores
cuadrticos medios de la variable a estimar y de su estimador lineal.
Demostracin: Por ser el error ortogonal a los datos: [ ] [ ] [ ] [ ] 0)()( 2***** === yEyyEyyyEeyE es decir: [ ] [ ]2** )(yEyyE = Finalmente, el error cuadrtico medio se expresa como:
( )[ ] ( )[ ] [ ] ( )[ ]( )[ ] [ ] ( )[ ] [ ]22*2
**2
)( ======
yEyEyyEyE
yyyEeyEyyeEeE
El error cuadrtico medio puede reducirse utilizando ms datos
en la estima, si estos datos no son ortogonales a la variable a estimar:
=
= Ni
yxiyyee iRaRR1
La reduccin del error cuadrtico medio es tanto mayor, cuanto
mayor sea la correlacin del dato extra introducido con la variable a estimar.
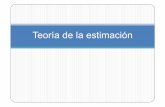
Interpretacin geomtrica:
x2
x1
y*
y
e
-
FILTRO DE WIENER-HOPF DE TIEMPO
DISCRETO La estimacin lineal de error cuadrtico medio mnimo puede
extenderse fcilmente a la estimacin de seales de tiempo discreto, con las siguientes consideraciones:
Las observaciones son muestras de un proceso estocstico. Los coeficientes del estimador son las muestras de la
respuesta impulsiva de un filtro lineal.
[ ] [ ] [ ]inxnand Ni
i = =
1
0
[ ] [ ] [ ]ndndn =
d[n]: seal a estimar (deseada). x[n]: seal observada. [n]: error de estimacin. Los coeficientes del filtro se obtienen aplicando el principio de
ortogonalidad:
[ ] [ ][ ] [ ] [ ] [ ] [ ] 1,....,1,0 ;0 10
==
=
=NlinxnandlnxEnlnxE
N
ii
[ ] [ ] [ ]=
==10
110 ;,,N
idxxi ,...,N,llnnRinlnRna
Para el caso estacionario:
[ ] [ ]=
==10
.1,...,1,0 ;N
idxxi NllRliRa
[ ] [ ] [ ]iRaRE dxNi
id =
= 10
2 0
-
APLICACIONES TPICAS
Problema Forma de la observacin
Secuencia deseada
Filtrado de la seal con ruido
[ ] [ ] [ ]nnsnx += [ ] [ ]nsnd = Prediccin de la seal con ruido
[ ] [ ] [ ]nnsnx += [ ] [ ] 0 ; >+= ppnsnd Suavizado de la seal con ruido
[ ] [ ] [ ]nnsnx += [ ] [ ] 0 ; >= ppnsnd Prediccin lineal
[ ] [ ]1= nsnx [ ] [ ]nsnd =
PROBLEMA PRCTICO:
Desconocimiento de la caracterizacin estadstica del problema (funciones de autocorrelacin de la seal observada y de correlacin cruzada de las seales observada y deseada).
SOLUCIN: Estimacin de las funciones de autocorrelacin y correlacin
cruzada (necesitamos ergodicidad). Utilizacin de algoritmos iterativos Filtro de Widrow-Hopf.
-
PREDICCIN LINEAL Se utilizan las muestras disponibles de un proceso para generar
muestras futuras del mismo.
[ ] [ ]=
= Nk
k knxanx1
Puede resolverse el problema sin utilizar algoritmos iterativos
estimando la secuencia de autocorrelacin (ergodicidad). El predictor lineal se obtiene aplicando el principio de
ortogonalidad:
[ ] [ ] [ ] NmmnxknxanxE Nk
k ,...,1 ;01
==
=
[ ] [ ] NmkmRamR Nk
xkx ,...,1 ;1
== =
-
APLICACIN: Codificacin diferencial:
Codificador Diferencial.
Decodificador Diferencial.