
Exactas – Ingeniería
98
Prácticas 0 a 7 Álgebra Exactas – Ingeniería 2013
-
Upload
filipe-caceres -
Category
Documents
-
view
44 -
download
0
Transcript of Exactas – Ingeniería

Prácticas 0 a 7
Álgebra
Exactas – Ingeniería
2013

Práctica 0
1
PRÁCTICA 0 NOTA A LOS ALUMNOS: Los temas que se incluyen en esta práctica se suponen conocidos por ustedes.
Debido a que el conocimiento de los mismos será necesario a lo largo de todo el curso, es
fundamental que a modo de repaso, resuelvan estos ejercicios consultando bibliografía y/o
al docente.
Ejercicio 1.- Calcular
1 1 1 1 12 1 1 1 1a)1 ( ) b) ( ) (1 2 )2 3 4 5 24 9 5 4 5
− + + + − + − − +
1 2 1( ) 1 1 1 1 1 1 2 1 1 2 39 6 4c) d) ( ) ( 1 ) 2( ) (3( ) ( ))1 2 3 6 5 9 18 5 4 3 7 14(5 )7
+ −− + − − − + + − − − +
+
Ejercicio 2.- Verificar las igualdades
3 1 1 3( : ) ( : )4 3 3 4a) 24,3 b) 21 5 2( )9 6 9
= =⋅
Ejercicio 3.- Calcular 1 12 1 22 21 1 1 1 1 1 1 1 1a) ( ( ) ) b) ( : ) c) ( : ) d) ( : )
8 4 2 27 3 27 3 27 3−− −− +
Ejercicio 4.- Ordenar de menor a mayor
Ejercicio 5.- Si tuviera que elegir la parte más grande de una fortuna F, ¿cuál de las dos
fracciones elegiría, 2
2
1de ó de ?1
nn F Fn n
−+
1 12 2 2 2
1 1 1 1 1 1 1 1a) ; ; ; ; b) ; ;5 6 7 9 15 5 8 10009 3 2 1 1c) ; ; ; ; 2 ; 3 3 ; 3 ; ; ; ; ( ) ; (100) ; (100)5 4 9 7 17
π π π−
− − −
− − − − −−

2
Ejercicio 6.- Analizar la validez de las siguientes proposiciones; dar un contraejemplo para
las que no son válidas
2 2 2 22
2 2
2
2 2 0
2 (2 )
2
a) 0 ; 0 i) 01b) ( ) j) 0
c) k) 0
d) l) ( ) 0e) (2 ) 2 m) 1 0
f ) (2 ) 2 n) 36 6 0
g) 0 o) (5 5) 5 0
1 1 1h) p)
n
m n m n
m n m n
n n
n
a b a b a b a a a a
a b a b a aa
a b a b a a a
a a a a aa a
a a a
a a a aa
a cbca b a b b dd
+
−
−
⋅
⋅ = ⋅ ≥ ≥ = ⋅ ≠
−+ = + = ≠
+ = + = − ≠
= = ≠
= = ≠
= ⋅ = ⋅ ≥
≥ + = ⋅ ≥
⋅= + =
+ ⋅
Rtas: V, F, F, F, V, F, V, F, V, F, F, V, V, V, F, F.
Ejercicio 7.- Una solución se dice más concentrada que otra si tiene mayor proporción
entre la sustancia activa y el diluyente que la otra. El boticario tiene un botellón de 1 litro y
medio donde 1/5 es sustancia activa y un bidón de 2 litros donde 2/3 es sustancia activa.
¿En cuál de los dos envases la solución es más concentrada?
Ejercicio 8.- El precio de un equipo de audio con el 15 % de descuento es de $ 3417. ¿Cuál
era el precio original?
Ejercicio 9.- Resolver las ecuaciones.
a) 6 x2 − 6x − 12 = 0 b) 9 x2 − 12 x + 4 = 0 c) 2 x2 − 7 x + 3 = 0
d) 15 x2 = 8x − 1 e) 3 x2 − 5x = 2 f) x2 + 2 π x − 2 = 0
Ejercicio 10.- Hallar dos números cuyo producto sea 4 y que sumen 6.
Ejercicio 11.- Representar en el plano
A1 = (2,2) A2 = (3,–1) A3 = (–1,4) A4 = (2,0) A5 = (1/4,1/2)
A6 = (–1,–1/4) A7 = ( 2 ,1) A8 = (– 2 ,1) A9 = (– 2 ,–1) A10 = ( 2 ,–1)
A11 = (0,–1) A12 = (3,1+ 2 )
Práctica 0
3
Ejercicio 12.- Representar en el plano los siguientes conjuntos
A1 = { (x,y) / x = 1 } A2 = { (x,y) / x ≥ 2 } A3 = { (x,y) / y < 2 }
A4 = { (x,y) / –3 < y < 2 } A5 = { (x,y) / x =1, y < 2 } A6 = { (x,y) / x = y }
A7 = { (x,y) / x = 2y } A8 = { (x,y) / x = 2 y + 1} A9 = { (x,y) / x .y < 0 }
A10 = { (x,y) / x . y = 0 } A11 = A4 ∩ A6 A12 = A2 ∪ A7
A13 = A3 ∩ A10 A14 = A3 ∪ A4 A15 = (A8 ∪ A3) ∩ A9
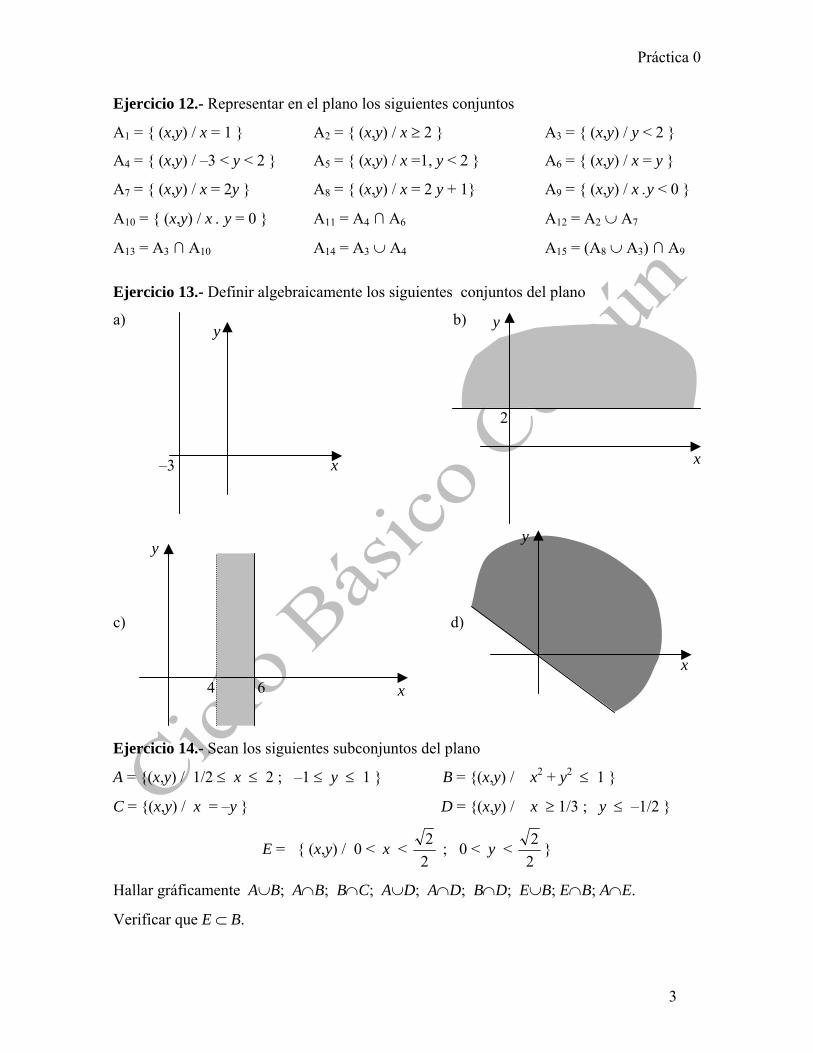
Ejercicio 13.- Definir algebraicamente los siguientes conjuntos del plano
a) b)
c) d)
Ejercicio 14.- Sean los siguientes subconjuntos del plano
A = {(x,y) / 1/2 ≤ x ≤ 2 ; –1 ≤ y ≤ 1 } B = {(x,y) / x2 + y2 ≤ 1 }
C = {(x,y) / x = –y } D = {(x,y) / x ≥ 1/3 ; y ≤ –1/2 }
E = { (x,y) / 0 < x < 22 ; 0 < y <
22 }
Hallar gráficamente A∪B; A∩B; B∩C; A∪D; A∩D; B∩D; E∪B; E∩B; A∩E.
Verificar que E ⊂ B.
y
x–3
y
x
2
x
y
x
y
4 6

4
Ejercicio 15. - Sea S la circunferencia de
radio 1 y centro en el origen. Sea α un ángulo,
0 ≤ α < 360º , con vértice en el origen, uno de
cuyos lados coincide con el semieje positivo de
las x. Sea P el punto donde el otro lado de α
interseca a S.
Si P = (x,y), se define
cos α = x ; sen α = y.
a) ¿Cuánto valen sen 90º ; cos 180º ; cos
270º ; sen 180º ?
b) Decidir si son positivos o negativos sen 37º ; cos 224º ; sen 185º.
c) Para todo α se tiene sen2 α + cos2 α = 1. ¿Por qué?
Deducir que − 1 ≤ sen α ≤ 1 y que − 1 ≤ cos α ≤ 1.
d) La longitud de la circunferencia de radio 1 es 2π . Hallar la longitud del arco que
corresponde a los siguientes ángulos:
α = 30º α = 45º α = 60º α = 72º α = 300º
α = 210º α = 270º α = 750º α = 432º α = 90º
Graficar en cada caso dichos ángulos y arcos en la circunferencia de radio 1.
e) Sabiendo que
o o o o o0 0 30 / 6 45 / 4 60 / 3 90 / 2
sen 0 1/ 2 2 / 2 3 / 2 1
cos 1 3 / 2 2 / 2 1/ 2 0
α π π π π
α
α
y que sen( ) sen cos sen coscos( ) cos cos sen sen
α β α β β αα β α β α β
± = ⋅ ± ⋅± = ⋅ ⋅∓
Calcular: sen 7π/12 cos 5π/12 sen π/12 cos 3π/4 sen 5π/6 cos 7π/6
f) Hallar α sabiendo que
i) sen 1/ 2
cos 3 / 2
α
α
= −⎧⎪⎨
=⎪⎩ ii)
sen 2 / 2
cos 2 / 2
α
α
⎧ = −⎪⎨
= −⎪⎩ iii) sen 3 / 2
cos 1/ 2αα
⎧ =⎪⎨
= −⎪⎩
x
y
y P
x 0
S
α 1

Práctica 1
5
PRÁCTICA 1
VECTORES EN R2 y EN R3
DEFINICIONES Y PROPIEDADES
Una flecha, que sirve para representar cantidades físicas (fuerzas, velocidades), es un
vector.
Para dar un vector necesitamos un origen (A) y un extremo (B)
que lo determinan totalmente, proporcionando su dirección,
longitud y sentido.
Vectores equivalentes son los que tienen igual dirección, longitud y sentido.
Los vectores de la
izquierda son todos
equivalentes a v.
Los vectores se pueden sumar.
La suma (v + w), de v y w es equivalente
a una de las diagonales del paralelogramo
de lados v y w.
También se puede multiplicar un vector por un número (escalar).
El resultado es un vector de igual dirección que el dado, el número afecta la longitud y el
sentido del vector.
En el plano R2 los puntos están dados por pares de números reales (sus coordenadas); para
dar un vector bastará dar dos pares de números reales que caractericen su origen y su
extremo.
v
wv
v + w
v–2v
–½v½v
6
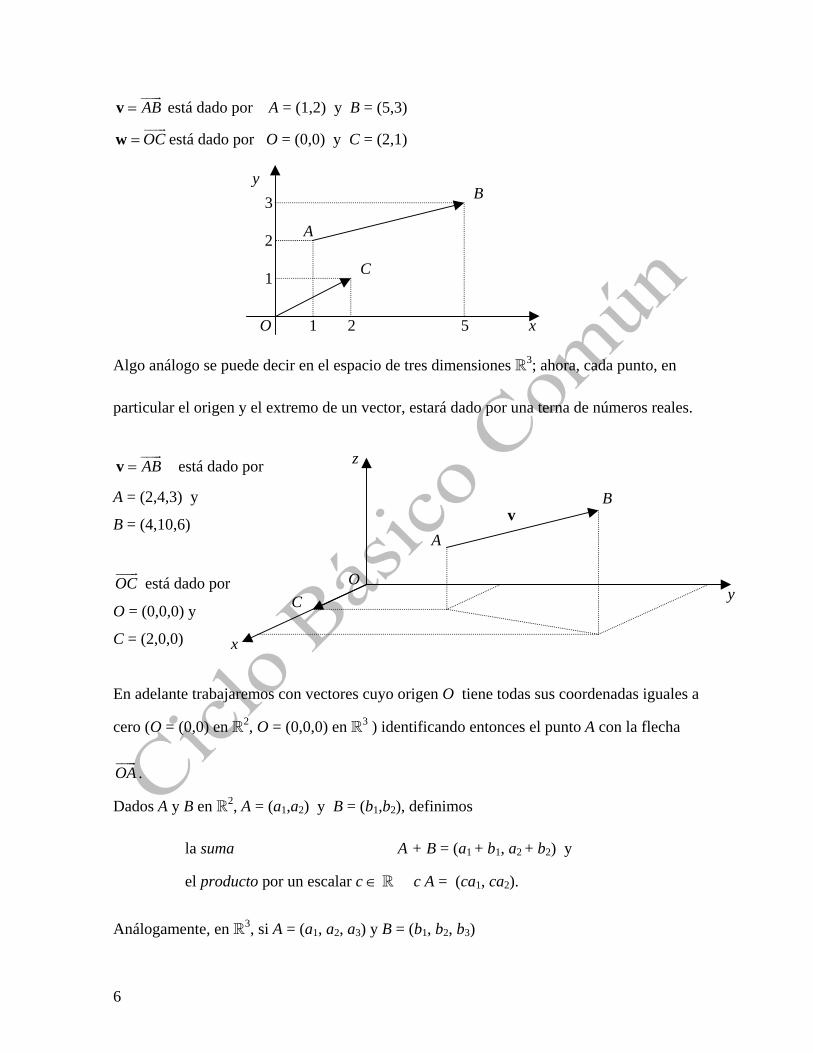
AB=v está dado por A = (1,2) y B = (5,3)
OC=w está dado por O = (0,0) y C = (2,1)
Algo análogo se puede decir en el espacio de tres dimensiones R3; ahora, cada punto, en
particular el origen y el extremo de un vector, estará dado por una terna de números reales.
AB=v está dado por
A = (2,4,3) y
B = (4,10,6)
OC está dado por
O = (0,0,0) y
C = (2,0,0)
En adelante trabajaremos con vectores cuyo origen O tiene todas sus coordenadas iguales a
cero (O = (0,0) en R2, O = (0,0,0) en R3 ) identificando entonces el punto A con la flecha
OA .
Dados A y B en R2, A = (a1,a2) y B = (b1,b2), definimos
la suma A + B = (a1 + b1, a2 + b2) y
el producto por un escalar c ∈ R c A = (ca1, ca2).
Análogamente, en R3, si A = (a1, a2, a3) y B = (b1, b2, b3)
C
B
A2
3
1
2O x5
y
1
B
Av
CO
y
z
x

Práctica 1
7
la suma A + B = (a1+b1, a2+b2, a3+b3) y
el producto por un escalar c ∈ R c A = (ca1, ca2, ca3).
Propiedades:
1) A + (B + C) = (A + B) + C
2) A + B = B + A
3) Si c ∈ R, c (A+B) = c A + c B
4) Si c1 ∈ R y c2 ∈ R, (c1 + c2 ) A = c1 A + c2 A y (c1 c2 ) A = c1 ( c2 A)
5) O + A = A
6) 1 A = A
7) A + (–1) A = O Notación – A = (–1) A
8) 0A = O
En este contexto,
a) AB es equivalente a CD si y sólo si D – C = B – A ; en particular,
AB es equivalente a OP si y sólo si P = B – A.
b) AB y CD son paralelos o tienen igual dirección si existe k en R, k ≠ 0 tal que
B – A = k ( D – C).
Si k > 0, AB y CD tienen igual sentido; si k < 0, AB y CD tienen sentidos opuestos.
LONGITUD DE UN VECTOR
En R2, si v = (v1, v2), la norma o longitud de v, que notaremos v , es 2 21 2v v= +v
Análogamente, en R3, si v = (v1, v2, v3) la norma o longitud de v es 2 2 21 2 3v v v= + +v
Propiedades:
1) Si A = O, entonces A = 0; si A ≠ O, entonces A > 0.
v
v1
v2

8
2) A = A−
3) Si c ∈ R Ac = ⎜c ⎜ A .
4) Desigualdad triangular: BA + ≤ A + .B
Si A y B son dos puntos de R2, la distancia entre A y B es la longitud del vector B – A
(equivalente a AB ) y se nota
d(A,B) = B A−
Análogamente, en R3, la distancia entre dos puntos A y B es
d(A,B) = B A−
Un vector A se dice unitario si A = 1.
ÁNGULO ENTRE DOS VECTORES
Llamaremos ángulo entre A y B al ángulo θ (A,B) que determinan los dos vectores y
verifica 0 ≤ θ (A,B) ≤ π.
PRODUCTO INTERNO O ESCALAR
Dados dos vectores A y B llamaremos producto interno (o escalar) de A y B al número real
θcosBABA =⋅ (θ = θ (A,B) ).
Propiedad:
2 2 21 ( )2
A B B A B A⋅ = + − −
En particular si A y B son vectores en el plano, A = (a1,a2) y B = (b1,b2)
A ⋅ B = a1b1+ a2 b2
B – A
B
A
A
B
θ

Práctica 1
9
En R3 , si A = (a1,a2,a3) y B = (b1,b2,b3)
A ⋅ B = a1b1 + a2 b2 + a3 b3
Observaciones: 1) El producto escalar de dos vectores es un número real.
2) A A A= ⋅
Propiedades:
PE1.- A ⋅ B = B ⋅ A
PE2.- A ⋅ (B +C) = A ⋅ B + A ⋅ C = (B + C) ⋅ A
PE3.- Si k ∈ R, (kA) ⋅ B = k (A ⋅ B) = A ⋅ (kB)
PE4.- Si A = O , A ⋅ A = 0. Si A ≠ O, A ⋅ A > 0
PE5.- Desigualdad de Cauchy-Schwarz: A B A B⋅ ≤
De PE5 se deduce que si A y B son ambos distintos de cero, vale
1 1A BA B
⋅− ≤ ≤
Propiedad: el ángulo entre dos vectores A y B (θ = θ (A,B)) es el único ángulo θ entre 0 y
π que verifica cos A BA B
θ ⋅=
Diremos que dos vectores A y B son ortogonales o perpendiculares si A ⋅ B = 0.
PRODUCTO VECTORIAL
Si A = (a1, a2, a3) y B = (b1, b2, b3) son vectores de R3, el producto vectorial de A y B es:
A × B = (a2b3 – a3b2, a3b1 –a1b3, a1b2 – a2b1)
Observación: El producto vectorial de dos vectores de R3 es un vector de R3.
Propiedades:
PV1.- A × B = – B × A
PV2.- A × (B + C) = A × B + A × C
(B + C) × A = B × A + C × A
PV3.- Si k ∈ R, (k A) × B = k (A × B) = A × (k B)
10
PV4.- A × A = O
PV5.- A × B es perpendicular a A y a B
PV6.- BA× 2 = A 2 B 2 – (A⋅B)2
PV7.- BA× = A B ⎜sen θ ⎜ donde θ es el ángulo formado por A y B.
Observación:
De PV7 se deduce que BA× es el área del paralelogramo de vértices O, A, B, A + B.
RECTAS
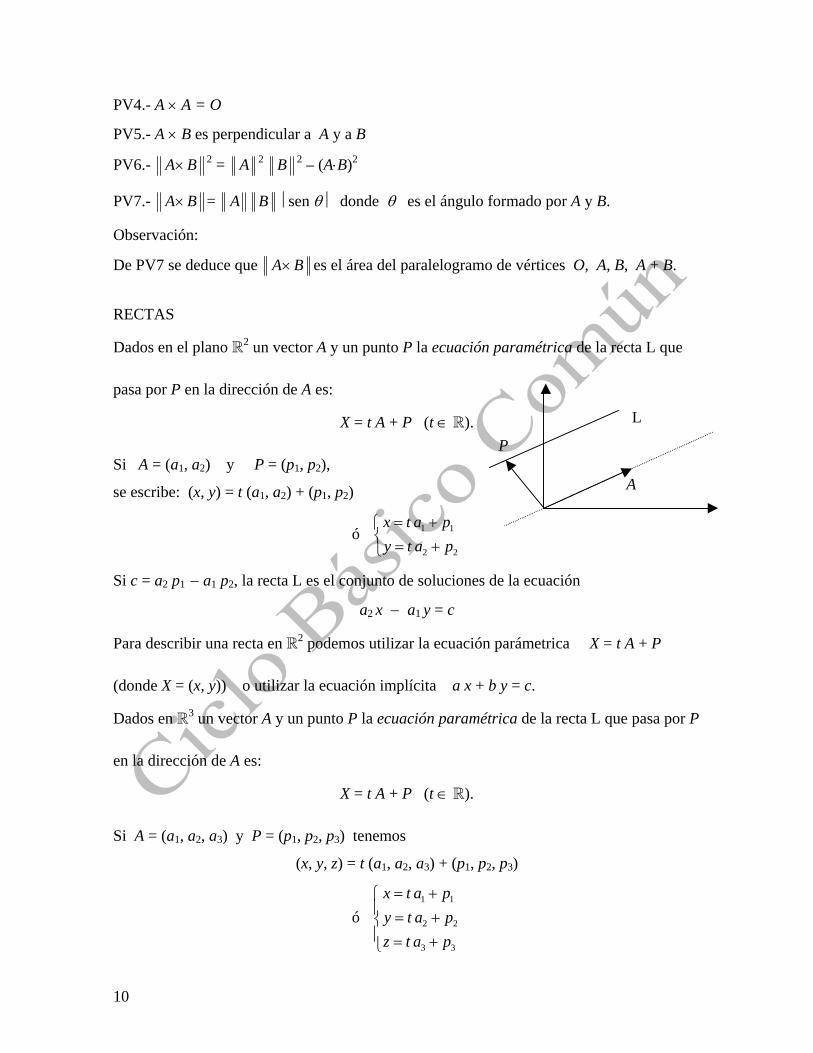
Dados en el plano R2 un vector A y un punto P la ecuación paramétrica de la recta L que
pasa por P en la dirección de A es:
X = t A + P (t ∈ R).
Si A = (a1, a2) y P = (p1, p2),
se escribe: (x, y) = t (a1, a2) + (p1, p2)
ó 1 1
2 2
x t a py t a p
= +⎧⎨ = +⎩
Si c = a2 p1 − a1 p2, la recta L es el conjunto de soluciones de la ecuación
a2 x − a1 y = c
Para describir una recta en R2 podemos utilizar la ecuación parámetrica X = t A + P
(donde X = (x, y)) o utilizar la ecuación implícita a x + b y = c.
Dados en R3 un vector A y un punto P la ecuación paramétrica de la recta L que pasa por P
en la dirección de A es:
X = t A + P (t ∈ R).
Si A = (a1, a2, a3) y P = (p1, p2, p3) tenemos
(x, y, z) = t (a1, a2, a3) + (p1, p2, p3)
ó 1 1
2 2
3 3
x t a py t a pz t a p
= +⎧⎪ = +⎨⎪ = +⎩
L
A
P

Práctica 1
11
Si c = a2 p1 – a1 p2 y d = a3 p2 – a2 p3, la recta L es el conjunto de soluciones del sistema
2 1
3 2
a x a y ca y a z d
− =⎧⎨ − =⎩
Para describir una recta en R3 podemos utilizar la ecuación paramétrica X = t A + P (donde
X = (x, y, z)) o un sistema de dos ecuaciones lineales con tres incógnitas.
ÁNGULO ENTRE DOS RECTAS
Para definir el ángulo entre dos rectas usamos sus vectores dirección, eligiendo entre los
ángulos que éstos forman, el único θ tal que 0 ≤ θ ≤ π / 2.
Dos rectas en R2 ó en R3 son perpendiculares si sus direcciones lo son.
Dos rectas en R2 ó en R3 son paralelas si sus direcciones lo son.
PLANOS EN R3
Dados un vector N y un punto Q de R3, la ecuación del plano Π que pasa por Q y es
perpendicular a N es Π : (X – Q ) ⋅ N = 0
El plano es el conjunto de todos los puntos X tales que (X – Q ) es perpendicular a N.
Diremos que N es un vector normal al plano.
Si X = (x1,x2, x3) y N = (a,b,c), la ecuación resulta:
Π: a x1 + b x2 + c x3 = d donde d = Q ⋅ N
Dos planos son paralelos si sus vectores normales lo son.
Una recta es paralela a un plano si el vector dirección de la recta y el vector normal al
plano son perpendiculares.
Dados un punto P y un plano Π cuya normal es N, se define distancia de P a Π como la
distancia de P a P’, donde P’ es el punto de intersección del plano Π con la recta de
dirección N que pasa por P.
Si Q es un punto en el plano, esta distancia es: ( )
d( , )Q P N
PN
− ⋅Π = .
Si P = (x0, y0, z0) y Π: ax + by + cz = k entonces: 0 0 0
2 2 2d( , )
ax by cz kP
a b c
+ + −Π =
+ +.
12
En el desarrollo de la práctica, para simplificar la notación, suprimiremos las flechas arriba
de los vectores.
VECTORES EN Rn
Llamaremos punto o vector en el espacio Rn a la n-upla
X = (x1, x2, x3, ..., xn) donde x1, x2, x3, ..., xn son números reales.
Estos números son las coordenadas de X.
Si A = (a1, a2, a3, ..., an) y B = (b1, b2, b3, ..., bn)
decimos que A = B si y sólo si a1 = b1, a2 = b2 , a3 = b3, ..., an = bn.
Definimos la suma A + B = (a1+b1, a2+b2,..., an + bn) y
el producto por un escalar c ∈ R c A = (ca1, ca2, ca3, ..., can).
Propiedades:
1) A + (B + C) = (A + B) + C
2) A + B = B + A
3) Si c ∈ R, c (A+B) = c A + c B
4) Si c1 ∈ R y c2 ∈ R, (c1 + c2 ) A = c1 A + c2 A y (c1 c2 ) A = c1 ( c2 A)
5) O + A = A
6) 1 A = A
7) A + (–1) A = O Notación – A = (–1) A
8) 0A = O
Llamaremos norma de A = (a1, a2, a3, ..., an) al número
2 2 21 2 ... nA a a a= + + +
Propiedades:
1) Si A = O, entonces A = 0; si A ≠ O, entonces A > 0.
2) A = A−
3) Si c ∈ R Ac = ⎜c ⎜ A .
4) Desigualdad triangular: BA + ≤ A + .B

Práctica 1
13
Si A = (a1, a2, a3, ..., an) y B = (b1, b2, b3, ..., bn), llamaremos distancia entre A y B a la
longitud del vector AB
2 2 21 1 2 2d( , ) ( ) ( ) ( )n nA B B A b a b a b a= − = − + − + + −
Si A = (a1, a2, a3, ..., an) y B = (b1, b2, b3, ..., bn) llamaremos producto escalar de A y B al
número real
A ⋅ B = a1b1+ a2 b2+ ... + anbn
Propiedades:
PE1.- A ⋅ B = B ⋅ A
PE2.- A ⋅ (B +C) = A ⋅ B + A ⋅ C = (B + C) ⋅ A
PE3.- Si k ∈ R, (kA) ⋅ B = k (A ⋅ B) = A ⋅ (kB)
PE4.- Si A = O , A ⋅ A = 0. Si A ≠ O, A ⋅ A > 0
PE5.- Desigualdad de Cauchy-Schwarz: ⎜ A ⋅ B ⎜ ≤ A B
Dados en Rn un vector A y un punto P la ecuación paramétrica de la recta L que pasa por P
en la dirección de A es: X = t A + P (t ∈R).
EJERCICIOS Ejercicio 1.- Efectuar las operaciones indicadas.
a) A + B; A + 2 B; A – B; A + (1/2) B; A – 3 B, si A = (3,2) y B = (2,4)
b) A – 3 B; A + C – B; 2 A – 2 (C + B), si A = (1,2,0); B = (2,0,0) y C = (1,1,1)
Ejercicio 2.- Hallar, si es posible, x; y; z tales que
a) (x, x +1) = (3, y) b) (2 x + y, x – 2 y) = (1,3)
c) (2,4) = (2 x + y, x – 2 y) d) (1,2,3) = x (2,4,3) + y (1,2,12) + z (0,0,3)
Ejercicio 3.- Encontrar las coordenadas del punto medio del segmento AB para
a) A = (–2,–1); B = (4,–1) b) A = (1,0,5); B = (2,4,7)

14
Ejercicio 4.- Calcular la longitud de los vectores
(3,0); (2,1); (–3,–4); )3,3,3( ; (–2,3,0); 3 (2,3,6)
Ejercicio 5.- Graficar en el plano el conjunto S = {(x, y) ∈ R2 / ),( yx = 1}
Ejercicio 6.- Hallar la distancia entre A y B si
a) A = (1,–3); B = (4,1) b) A = (4,–2,6); B = (3,–4,4) c) A = (1,2,–3); B = (3,–2,0)
Ejercicio 7.- Determinar todos los valores de k tales que
a) A = 2 si A = (1, k, 0)
b) d (A , B) = 2 si A = (1,1,1); B = (k,–k,2)
c) A = 1 si A = k (2,2,1)
Ejercicio 8.- Si v = (2,–1,1); w = (1,0,2); u = (–2,–2,1), calcular
a) b) c) 3 3+ + +v w v w v w
d) −v u e) 1 ww
f) + −v w u
Ejercicio 9.- En cada caso encontrar los dos vectores unitarios paralelos a A
a) A = (3,–1) b) A = (0,3,0) c) A = (2,–3,6) d) A = (a,b,c)
Ejercicio 10.- a) Sean A = (1,2); B = (–1,–2); C = (–2,1); D = (1,0); E = (0,0); F = (x, y)
Calcular A ⋅ B; A ⋅ C; A ⋅ E; B ⋅ C;
B ⋅ ( C + D); (D – C ) ⋅ A; F ⋅ A; F ⋅ E
b) Sean A = (1,1,1); B = (1,–1,0); C = (2,–1,–1); D = (2,3,–1); E = (–1,0,2)
Calcular A ⋅ B; A ⋅ C; A ⋅ (B + C); A ⋅ (2 B – 3 C);
A ⋅ D; A ⋅ E; D ⋅ (A + E )
Ejercicio 11.- a) Encontrar y representar en el plano todos los vectores (x, y) ortogonales a
i) A = (1,2) ii) E1 = (1,0) iii) E2 = (0,1)
b) encontrar todos los vectores (x, y, z) de R3 ortogonales a
i) E1 = (1,0,0) ii) E2 = (0,1,0) iii) E3 = (0,0,1)

Práctica 1
15
iv) E1 y E2 v) E1 y E3 vi) E2 y E3
Ejercicio 12.- Dados A = (1,–2) y B = (3,4), hallar todos los vectores (x, y) de R2 tales que
A ⋅ (x, y ) = A ⋅ B
Ejercicio 13.- a) Encontrar un vector ortogonal a (1,1) de longitud 8, ¿es único?
b) encontrar todos los vectores ortogonales a (0,0,1) de longitud 1; dibujarlos.
c) Encontrar un vector que sea ortogonal a A y a B si A = (1,2,–1) y B = (2,0,1)
Ejercicio 14.- Hallar el ángulo que forman A y B en los siguientes casos
a) A = (1,1); B = (–1,0) b) A = (1,2); B = (–2,1)
c) A = (1, 3 ); B = (–2,2 3 ) d) A = (2,1,1); B = (1,–1,2)
Ejercicio 15.- En cada caso, encontrar B tal que
a) si A = (1,1), α (A , B) = π / 4 y B = 2
b) si A = (–1,0), α (A , B) = π / 3 y B = 1
Ejercicio 16.- Sea A un vector de longitud 3. Si B es un vector tal que α (A , B) = π / 4
y (A – B) es ortogonal a A, calcular .B
Ejercicio 17.- Encontrar una ecuación paramétrica de
a) la recta que pasa por (1,3,–1) y tiene dirección (1,–2,2)
b) la recta que pasa por (1,1) y (2,3)
c) la recta que pasa por el origen y es paralela a la recta que contiene a
A = (2,–2,1) y B = (–3,2,1)
d) dos rectas distintas L1 y L2 que pasen por (–2,1,2) y sean perpendiculares a la recta
L : X = μ (2,2,–2) + (1,0,1)
Ejercicio 18.- Encontrar la intersección de cada par de rectas
a) X = μ (2,2,2) + (1,0,0) X = μ (–1,–1,–1) + (0,–1,–1)
b) X = μ (1,3,1) + (0,–1,2) X = μ (2,–1,0) + (1,1,2)
c) X = λ (2,–2,1) + (3,0,2) X = λ (2,1,–1) + (–1,1,2)

16
Ejercicio 19.- Si A = (1,2,2); B = (–1,1,2); C = (–2,2,–1), calcular
A × B; B × A; A × C; A × (B × C); (A × B) × C; (A × B) ⋅ A ; (A × B) ⋅ C
Ejercicio 20.- Hallar v, de norma 1, que sea ortogonal a A = (1,1,1) y a B = (1,1,–1)
Ejercicio 21.- Calcular el área de
a) el paralelogramo de vértices O, A, B y (A + B ) si A = (2,1,0) y B = (1,5,0)
b) el triángulo de vértices A = (1,3,2); B = (1,5,0) y C = (1,1,–2)
Ejercicio 22.- Dar una ecuación del plano Π.
a) Π es perpendicular a N = (1,2,–1) y pasa por P = (5,3,3)
b) Π contiene a los puntos A = (2,–1,3); B = (2,1,1) y C = (3,3,2)
c) Π contiene a los ejes x e y
d) Π es paralelo al plano Π’: 3x + y – 4z = 2 y pasa por el punto P = (1,1,–2)
Ejercicio 23.- Sean Π : 2x – y + 3z = 5; Π’: x + 3y – z = 2
L : X = α (1,–1,–1) + (1,0,–2); L’ : X = α (3,5,1) + (0,1,2).
Calcular: L ∩ Π ; L’∩ Π ; Π ∩ Π’.
Ejercicio 24.- Sean L: X = β (k2 +1, k, k+7) y Π: x + 2 y – 3 z = 2.
Determinar todos los valores de k para los cuales L ∩ Π = ∅
Ejercicio 25.- Si L : X = α (1,–1,3) + (0,2,1) y A = (1,2,–3),
a) hallar una ecuación del plano Π que contiene a L y al punto A
b) hallar una ecuación de la recta L’ perpendicular a Π que pasa por A
c) calcular L ∩ Π y L’∩ Π.
Ejercicio 26.- a) Dar una ecuación del plano Π que contiene a las rectas
L: X = λ (1,2,–1) + (3,0,0) y L’: X = λ (–2,–4,2) + (0,1,1)
b) Si L: X = λ (1,2,0) + (1,1,1), dar una ecuación del plano Π que contiene a L y tal que
la recta L’: X = λ (–1,0,1) + (1,2,3) es paralela a Π.

Práctica 1
17
Ejercicio 27.- Sean Π : x1 + x2 + x3 = 5 y L: X = λ (1,1,–2). Hallar una recta L’
contenida en Π que sea perpendicular a L. ¿Es única?
Ejercicio 28.- Sea Π : 3x1 –2 x2 + 4x3 = 1
a) Dar las ecuaciones de dos rectas L1 y L2 , contenidas en Π y perpendiculares entre sí
b) Dar la ecuación de una recta L’ contenida en Π que sea perpendicular a la recta
L: X = t (–2,3,1) + (2,1,2)
Ejercicio 29.- Hallar la distancia entre P = ( 2,2,1) y el plano que contiene a las rectas
L: X = λ (1,2,–1) + (1,3,2) y L’: X = α (2,–1,3) + (3,2,5)
Ejercicio 30.- Sea P = (2,1,–1)
a) si Π : x1 + x2 – x3 = 3, ¿cuál es el punto de Π a menor distancia de P?
b) si L: X = λ (1,3,1) + (2,2,0), ¿cuál es el punto de L a menor distancia de P?
Ejercicio 31.- Sean L: X = β (2, 3,–1) y Π: x1 + 2 x2 = 0. Determinar
a) todos los puntos de R3 que están a distancia 5 de Π
b) todos los puntos de L que están a distancia 5 de Π.
Ejercicio 32.- Si Π1: 3 x1 + 2 x2 – 6 x3 = 1 y Π2: – 3 x2 + 4 x3 = 3, hallar todos los puntos P de R3 que verifican
a) d (P, Π1 ) = d (P, Π2 ) b) d (P, Π1 ) = d (P, Π2 ) = 2
EJERCICIOS SURTIDOS 1. Demostrar las siguientes igualdades e interpretarlas geométricamente
2 2 2
a) 0
b) 0 ( )
− = + ⇔ ⋅ =
+ = + ⇔ ⋅ =
A B A B A B
A B A B A B Teorema de Pitágoras
2. Sean la recta : (2,1, 1) (1, 1,2)− + −λL y los puntos A = (1,0,2) y B = (3,−1,6).
Hallar todos los puntos P∈L tales que el triángulo ABP es rectángulo en P.

18
3. Sean P=(−1,2,0) , Q=(−2,1,1) y L:(1,1, −1)+λ(0, −1,3).
Dar una ecuación del plano Π que contiene a la recta paralela a L que pasa por P, y a la
recta paralela a L que pasa por Q.
4. Sean el plano : 2 2 1Π − + =x y z , (1,1,1)=A y (3,2, 1)= −B . Hallar todos los puntos
y ∈ΠC D tales que ABCD es un cuadrado.
5. Sean 1 : (0,1, 1) (0, 1,0)− + −λL y 2 : (1,1,1) (2,3,0)+λL .
Encontrar, si es posible, un plano Π tal que ( , ) 2 6Π =d P para todo 1∈P L y para todo
2∈P L . 6. Sean 1 : 3 2 4x y zΠ − + = , y 2Π el plano que contiene a los puntos A=(0,1,1), B=(3,−1, −1) y C=(3,0,1). Hallar todos los puntos del plano 1Π que están a distancia 2 del plano 2Π .
7. Sean 1 : 7 5 2 0Π − − =x y z , 2 : 5 4 0Π − − =x y z , y L la recta que pasa por los puntos P = (−2,3, −3) y Q = (−1,2, −1). Hallar todos los planos Π que verifican simultáneamente:
i) 1 2Π ∩ Π ∩ Π = ∅ ii) ( , ) 14 Π =d R para todo ∈R L . 8. Sean 2
1 : ( , , 1)+ −k k k kλL ; 2 : (4,1, 1) (2 ,0,2 )− + k kλL y : 2 2 3Π − + =x y z . Hallar todos los ∈k R para los cuales ( , ) ( , )Π = Πd P d Q para todo 1∈P L y todo 2∈Q L 9. Sean 1 2 3: 3 1x x xΠ − + = − , : (0, 2,1) (1,2,3)λ − +L y P=(−1,1,2). Encontrar una recta 'L que satisfaga simultáneamente: )P 'i ∈L ) 'ii ∩ ≠ ∅L L ) ' es paralela a iii ΠL .
10. Dadas L:λ(1,2,1)+(0,1,1) y L′:λ(2,−1,−2)+(1,1,0), hallar todos los planos Π tales que
Π ∩ L′=∅ y d(P, Π )= 2 para todo P∈ L.
11. Sean L1:λ(1,−2,2)+(0,1,−1); L2:λ(0,1,−1)+(−2,1,−1) y L3:λ(1,3,−1)+(0,−5,0).
Encontrar, si es posible, una recta L tal que L1∩L2∩L≠∅ ; L3∩L≠∅ y L⊥L3 .
12. Sean en 3R el plano 1 2 3: 2 2 4x x xΠ − + = , P=(2,2,2) y Q=(1,0,1). Determinar un plano 'Π que contenga a P, a Q, y al punto R de Π tal que d(P,R)=d(P, Π).
Práctica 2
19
PRÁCTICA 2 SISTEMAS LINEALES Y MATRICES
DEFINICIONES Y PROPIEDADES
Un sistema lineal de m ecuaciones con n incógnitas es un conjunto de m ecuaciones
lineales en las variables 1 2( , ,..., )nx x x :
11 1 12 2 1 1
21 1 22 2 2 2
1 1 2 2
.........................
.................................................................
n n
n n
m m mn n m
a x a x a x ba x a x a x b
a x a x a x b
+ + + =⎧⎪ + + + =⎪⎨⎪⎪ + + + =⎩
donde las a y las b con subíndices representan constantes.
Cuando bi = 0 para todo i, 1≤i≤m, se dice que el sistema es homogéneo.
Una n-upla 1 2( , ,..., )ns s s es una solución del sistema si y sólo si al reemplazar xi por si,
1≤i≤n, se satisface cada una de las m ecuaciones.
Un sistema se dice incompatible si no tiene ninguna solución.
Un sistema se dice compatible si tiene alguna solución.
Si un sistema compatible tiene solución única es determinado, y si tiene infinitas soluciones
es indeterminado.
Por matriz ampliada o matriz aumentada del sistema, entendemos el arreglo rectangular de
números:
11 12 1 1
21 22 2 2
1 2
n
n
m m mn m
a a a ba a a b
a a a b
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
En general, dados los números naturales n y m, se llama matriz de m filas y n columnas con
coeficientes reales, al arreglo rectangular A=
11 12 1
21 22 2
1 2
n
n
m m mn
a a aa a a
a a a
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
, donde ija ∈R.
Abreviadamente A = ( )ija .

20
Llamamos filas de A a las n-uplas ( )1 2, , , con 1,...,i i i inA a a a i m= =…
Llamamos columnas de A a las m-uplas ( )1 2, , , con 1,...,jj j mjA a a a j n= =…
Con esta notación, ( )1
21 2, , , y también n
m
AA
A A A A A
A
⎛ ⎞⎜ ⎟⎜ ⎟= =⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
.
Decimos que dos sistemas de ecuaciones son equivalentes cuando tienen el mismo conjunto
de soluciones.
Propiedad: Las siguientes operaciones sobre las ecuaciones de un sistema dan lugar a un
sistema equivalente al dado:
1- Multiplicar una de las ecuaciones por una constante no nula.
2- Intercambiar dos de las ecuaciones.
3- Sumar un múltiplo de una de las ecuaciones a otra ecuación.
Las anteriores operaciones sobre las ecuaciones se corresponden con las siguientes
operaciones sobre las filas de la matriz aumentada del sistema. Se denominan operaciones
elementales sobre las filas:
1- Multiplicar una de las filas por una constante no nula.
2- Intercambiar dos de las filas.
3- Sumar un múltiplo de una de las filas a otra fila.
El método de eliminación de Gauss para resolver sistemas lineales, consiste en llevar la
matriz aumentada del sistema planteado, vía la aplicación sistemática de operaciones
elementales sobre sus filas, a la forma escalonada en las filas reducida, que a continuación
describiremos. La resolución del sistema resultante, que es equivalente al original, es
inmediata.
Se dice que una matriz se encuentra en la forma escalonada en las filas reducida, si se
cumplen las siguientes condiciones:
1- Si una fila no consta únicamente de ceros, entonces su primer coeficiente no nulo es un 1
(a este 1 se lo denomina 1 principal).
2. Si existen filas que constan sólo de ceros (filas nulas), se agrupan en la parte inferior de
la matriz.

Práctica 2
21
3- Si dos filas sucesivas son no nulas, el 1 principal de la fila inferior se presenta más a la
derecha que el 1 principal de la fila superior.
4- Cada columna que contenga un 1 principal tiene ceros en todas las demás posiciones.
Si una matriz tiene sólo las propiedades 1, 2 y 3 se dice que está en la forma escalonada en
las filas.
Llamamos rango fila (o rango) de la matriz A al número de filas no nulas que tiene la
matriz escalonada en las filas equivalente a A.
En el conjunto de las matrices de m filas y n columnas con coeficientes reales, notado Rm×n,
están definidos la suma y el producto por escalares, de la siguiente manera:
Si A = ( )ija ∈ Rm×n , B = ( )ijb ∈ Rm×n y k ∈ R, entonces
A +B = ( )ij ija b+ ∈ Rm×n kA = ( )ijka ∈ Rm×n
Es decir, suma y producto por escalares se calculan coordenada a coordenada, en forma
análoga a como se hace en Rn .
Si A = ( )ija ∈ Rm×n y B = ( )ijb ∈ Rn×s se define el producto de A por B como
AB = C = ( )ijc ∈ Rm×s
donde ijc es igual al producto escalar de la fila i de A por la columna j de B
ijc = (fila i de A) . (columna j de B)
Es posible calcular AB sólo si la cantidad de columnas de A coincide con la cantidad de
filas de B.
Propiedades del producto.
- Es asociativo: (AB)C = A(BC)
- Es distributivo: A(B+C) = AB + AC
(A+B)C = AC + BC

22
- La matriz identidad I =
1 0 0 00 1 0 0
0 0 1 00 0 0 1
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
∈ Rn×n , verifica AI = IA para toda
matriz cuadrada A ∈ Rn×n . La matriz I es el elemento neutro para este producto.
Notación: El sistema
11 1 12 2 1 1
21 1 22 2 2 2
1 1 2 2
.........................
.................................................................
n n
n n
m m mn n m
a x a x a x ba x a x a x b
a x a x a x b
+ + + =⎧⎪ + + + =⎪⎨⎪⎪ + + + =⎩
puede escribirse AX = B, con A = ( )ija ∈ Rm×n , X = 1
n
x
x
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
∈ Rn×1 , B = 1
m
b
b
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
∈ Rm×1 .
En adelante identificaremos X ∈ Rn×1 con x ∈ Rn y B ∈ Rmx1 con b ∈ Rm . Así el sistema
se escribirá Ax = b.
Propiedades: Sean A ∈ Rm×n , b ∈ Rm ,
S0 = { }/n A∈ =x x 0R Sb = { }/n A∈ =x x bR
a) Si x ∈ S0 e y ∈ S0 , entonces x + y ∈ S0. Si x ∈ S0 y k ∈ R , entonces kx ∈ S0.
Esto dice que la suma de dos soluciones de un sistema homogéneo es también solución del
mismo, y que los múltiplos de una solución son también soluciones.
b) Si x ∈ Sb e y ∈ Sb , entonces x − y ∈ S0.

Práctica 2
23
Esto es, la diferencia entre dos soluciones de un sistema no homogéneo, es solución del
sistema homogéneo asociado.
c) Sea s una solución particular del sistema Ax = b (s ∈ Sb), entonces
Sb = S0 + s = ⎨ y ∈ Rn / y = x + s , con x ∈ S0⎬.
Esto significa que cualquier solución del sistema Ax = b puede obtenerse sumando una
solución particular del sistema con una solución del sistema homogéneo asociado.
Una matriz cuadrada A ∈ Rn×n se dice inversible si existe B ∈ Rn×n tal que AB = BA = I .
Cuando B existe, es única y la notamos B = A−1.
Propiedad: Si A ∈ Rn×n y C ∈ Rn×n son inversibles, entonces AC es inversible y vale
(AC)− 1 = C−1A−1.
Diremos que dos matrices son equivalentes por filas si puede obtenerse una de la otra por
medio de una sucesión finita de operaciones elementales sobre las filas.
Propiedad: Si A ∈ Rn(n , las siguientes afirmaciones son equivalentes:
a) A es inversible.
b) Ax = b tiene solución única, cualquiera sea b ∈ Rn.
c) Ax = 0 tiene únicamente la solución trivial.
d) A es equivalente por filas a I ∈ Rn×n.

24
EJERCICIOS
Ejercicio 1.- Dado el sistema lineal
S 1 2 3
1 2 4
1 3 4
2 23 0
2 3 1
x x xx x xx x x
− + + =⎧⎪ + − =⎨⎪ + + = −⎩
¿Cuáles de las siguientes 4-uplas son soluciones de S? ¿y del sistema homogéneo asociado?
x = (2,2,1,0) y = (1,1,1,4) z = (0,0,0,0)
u = (−2, 53− , 10
3,−7) v = (−1, 1
3, 1
3,0) w = (−1, −2,3, −7)
Ejercicio 2.- Determinar, si existen, a y b para que (2, −2,1) sea solución de
1 2 3
2 3
1 2 3
2 14
(2 ) 3
x ax xax bx
bx x a b x
+ + = −⎧⎪ − = −⎨⎪ + + − =⎩
Ejercicio 3.- Obtener un sistema equivalente al dado, cuya matriz ampliada sea escalonada
en las filas reducida.
a) 1 2 3
1 2 3
1 2 3
2 22 2 1
2 2 0
x x xx x xx x x
+ + =⎧⎪ + + = −⎨⎪− + + =⎩
b) 1 2 3 4 5
1 2 3 4 5
1 2 3 4 5
2 3 2 13 3 5 3 0
2 2 2 2 2 2
x x x x xx x x x xx x x x x
+ + + + = −⎧⎪ + + + + =⎨⎪− − + − − =⎩
Práctica 2
25
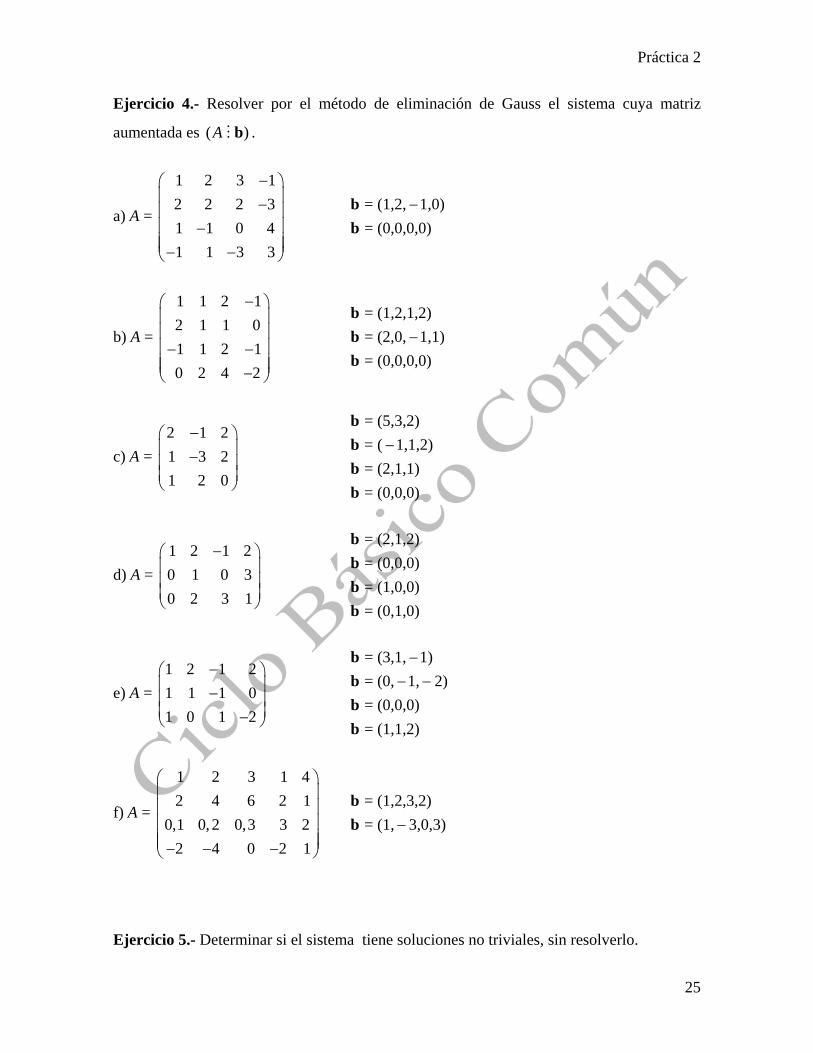
Ejercicio 4.- Resolver por el método de eliminación de Gauss el sistema cuya matriz
aumentada es ( )A b .
a) A =
1 2 3 12 2 2 31 1 0 41 1 3 3
−⎛ ⎞⎜ ⎟−⎜ ⎟⎜ ⎟−⎜ ⎟⎜ ⎟− −⎝ ⎠
= (1,2, 1,0)= (0,0,0,0)
−bb
b) A =
1 1 2 12 1 1 01 1 2 10 2 4 2
−⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟− −⎜ ⎟⎜ ⎟−⎝ ⎠
= (1,2,1,2)= (2,0, 1,1)= (0,0,0,0)
−bbb
c) A = 2 1 21 3 21 2 0
−⎛ ⎞⎜ ⎟−⎜ ⎟⎜ ⎟⎝ ⎠
= (5,3,2)= ( 1,1,2)= (2,1,1)= (0,0,0)
−bbbb
d) A = 1 2 1 20 1 0 30 2 3 1
−⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
= (2,1,2)= (0,0,0)= (1,0,0)= (0,1,0)
bbbb
e) A = 1 2 1 21 1 1 01 0 1 2
−⎛ ⎞⎜ ⎟−⎜ ⎟⎜ ⎟−⎝ ⎠
= (3,1, 1)= (0, 1, 2) = (0,0,0) = (1,1,2)
−− −
bbbb
f) A =
1 2 3 1 42 4 6 2 1
0,1 0,2 0,3 3 22 4 0 2 1
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟− − −⎝ ⎠
= (1,2,3,2)= (1, 3,0,3)−
bb
Ejercicio 5.- Determinar si el sistema tiene soluciones no triviales, sin resolverlo.

26
a) 1 2
1 2
00
x xx x
+ =⎧⎨− − =⎩
b) 1 2 3
2 3
2 00
x x xx x
+ − =⎧⎨ + =⎩
c)
1 2 3 4
2 4
3 4
4
2 0000
x x x xx x
x xx
+ + − =⎧⎪ − =⎪⎨ + =⎪⎪ =⎩
d) 11 1 12 2 13 3 14 4
21 1 22 2 23 3 24 4
00
a x a x a x a xa x a x a x a x
+ + + =⎧⎨ + + + =⎩
Ejercicio 6.- Mostrar tres elementos de cada uno de los conjuntos siguientes.
a) S1 = { }3 3 / , 1 , 3ij jiA a a i j×∈ = ≤ ≤R (matrices simétricas)
b) S2 = { }3 3 / 1, 1 , 3ij jiA a a i j×∈ + = ≤ ≤R
c) S3 = { }3 3 / , 1 , 3ij jiA a a i j×∈ =− ≤ ≤R (matrices antisimétricas)
d) S4 = 4
4 4
1
/ 0iii
A a×
=
⎧ ⎫∈ =⎨ ⎬⎩ ⎭
∑R (matrices de traza nula)
e) S5 = { }3 4 / tiene alguna fila nula×∈A AR
f) S6 = { }3 3 / 0, si ijA a i j×∈ = >R (matrices triangulares superiores)
Ejercicio 7.- Efectuar, cuando sea posible, los cálculos indicados.
A = 2 21 31 0
−⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
, B = 1 2 32 0 01 1 0
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟−⎝ ⎠
, C = 1 1 12 1 10 1 0
−⎛ ⎞⎜ ⎟−⎜ ⎟⎜ ⎟⎝ ⎠
, D = 2 10 2⎛ ⎞⎜ ⎟−⎝ ⎠
, E = 2 2 11 1 0
⎛ ⎞⎜ ⎟−⎝ ⎠

Práctica 2
27
i) BA ii) BC iii) CB iv) AB v) BA – C
vi) ED vii) DA viii) EA + D ix) AE + 3C
Ejercicio 8.- Dadas A = 1 3 21 1 17 7 5
⎛ ⎞⎜ ⎟−⎜ ⎟⎜ ⎟⎝ ⎠
y B = 2 1 10 1 13 3 3
⎛ ⎞⎜ ⎟−⎜ ⎟⎜ ⎟⎝ ⎠
, hallar
a) la tercera fila de AB
b) la tercera columna de BA
c) el coeficiente c32 de C = BAB
Ejercicio 9.- Determinar todas las matrices B que verifican:
a) 1 20 1⎛ ⎞⎜ ⎟⎝ ⎠
B = 1 00 1⎛ ⎞⎜ ⎟⎝ ⎠
b) 1 12 2
⎛ ⎞⎜ ⎟− −⎝ ⎠
B = 1 00 1⎛ ⎞⎜ ⎟⎝ ⎠
c) 1 2 3 34 5 6 = 61 2 3 3
B⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟− − − −⎝ ⎠ ⎝ ⎠
d)
12
2 11 1 01 1 1 = 1 0 20 2 3 0 0 2
B
⎛ ⎞⎛ ⎞⎜ ⎟⎜ ⎟− − − −⎜ ⎟⎜ ⎟
⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠

28
e) 1 1 0 2 11 1 1 = 3 00 2 3 1 2
B−⎛ ⎞ ⎛ ⎞
⎜ ⎟ ⎜ ⎟− − −⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
Ejercicio 10.- Hallar todas las matrices 2 2A ×∈R tales que 2 1 2 1
= .2 1 2 1
A A− −⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎜ ⎟− −⎝ ⎠ ⎝ ⎠
Ejercicio 11.- Hallar todas las matrices 2 2X ×∈R tales que AX + B = BX + A.
a) 2 1 1 0
= = 1 1 2 2
A B⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎜ ⎟− −⎝ ⎠ ⎝ ⎠
b) 2 1 1 0
= = 1 5 2 2
A B⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎜ ⎟− − −⎝ ⎠ ⎝ ⎠
Ejercicio 12.- Determinar cuáles de las siguientes matrices son inversibles; exhibir la
inversa cuando exista.
1 0 3 0 1 2 1 2 = = = =
0 1 0 3 0 1 1 2A B C D⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞
⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟− − −⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠
2 1 1 2 1 1 = 0 1 1 = 0 1 1
3 1 1 2 0 0
⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟−⎝ ⎠ ⎝ ⎠
E F 1 1 1 1
= = + 0 2 0 2
G H G H− −⎛ ⎞ ⎛ ⎞
⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
Ejercicio 13.- Sea A = 1 3 20 1 11 0 1
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟− −⎝ ⎠
. Decidir si A−1 es solución del sistema

Práctica 2
29
1 5 4 1 2 0
= 1 1 0 0 1 1
X⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎜ ⎟−⎝ ⎠ ⎝ ⎠
.
Ejercicio 14.- Sea 3 3 A ×∈R .
Si 1 0 13 y 1 son soluciones de = 41 2 5
⎛ ⎞ ⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟ ⎜ ⎟−⎝ ⎠ ⎝ ⎠ ⎝ ⎠
Ax , hallar 4 soluciones de 1
= 45
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
Ax .
Ejercicio 15.- Sean (1,3,1), (2,2,4) y (2,0,4) soluciones de un sistema lineal no homogéneo.
a) Hallar dos rectas distintas tales que todos sus puntos sean soluciones del sistema
homogéneo asociado.
b) Econtrar un plano tal que todos sus puntos sean soluciones del sistema no homogéneo.
Ejercicio 16.- Sea 3 3 A ×∈R .
0 2 1 1 02 y 1 son soluciones de = 2 y 1 es solución de = 0 .2 1 2 2 1
A A⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠
x x
Encontrar una recta de soluciones del sistema 1 0
= 2 + 0 .2 1
A⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
x
Ejercicio 17.- Sean 1 1 1 1
1 1 1 4 = , = 2 1 1 0
0 1 2 31 3 3 1
−⎛ ⎞−⎛ ⎞ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎜ ⎟
⎝ ⎠
A B y { }40 / = A= ∈x x 0RS .

30
Encontrar todos los 0
2 tales que = 3
4B
⎛ ⎞⎜ ⎟∈ ⎜ ⎟⎜ ⎟⎝ ⎠
x xS .
Ejercicio 18.- Dadas 5 1 2
= 2 1 3 y = 33 2 1 1
aA a
a
−⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎜ ⎟− − −⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟+⎝ ⎠ ⎝ ⎠
c , determinar todos los valores de a
para los cuales el sistema Ax = c es compatible.
Resolver el sistema para alguno de los valores de a hallados.
Ejercicio 19.-
a) Encontrar todos los valores de k ∈ R para los cuales el sistema S tiene solución única.
S
21 2 3
2 3
3
( 1) 0( 1) 0
( 2) 0
k x x kxk x x
k x
⎧ − + + =⎪ − + =⎨⎪ + =⎩
b) Determinar todos los valores de k para los cuales el sistema S admite solución no trivial
S
1 2 3 4
1 2 3 4
1 2 3 4
1 2 3 4
( 1) 2 3 0( 2) 4 0
2 ( 4) 02 3 0
k x x kx xx k x kx xx x kx k xx x kx x
+ − + + =⎧⎪ + + + + =⎪⎨ − + + + =⎪⎪ − + + =⎩
Ejercicio 20.- Encontrar todos los valores de a y b para los cuales los sistemas cuyas
matrices ampliadas se dan a continuación son compatibles.

Práctica 2
31
a) 1 3 12 a b
−⎛ ⎞⎜ ⎟⎝ ⎠
b) 2
1 3 30 1 1 2
ba a b−⎛ ⎞
⎜ ⎟+ − +⎝ ⎠
c) 1 3 3 22 3 3 2
0 1 1a a b a
−⎛ ⎞⎜ ⎟− −⎜ ⎟⎜ ⎟+ − − +⎝ ⎠
d) 1 1 22 4 4 2
2 0 12 1
a ba
a
− +⎛ ⎞⎜ ⎟− −⎜ ⎟⎜ ⎟−⎝ ⎠
Ejercicio 21.- Resolver el sistema para todos los valores de b.
1 2 3 4
1 2 3
1 2 3 4
2 22 2
3 3 2 2
x bx x x bx bx xx bx x x b
+ + − = +⎧⎪ + − =⎨⎪ + + − =⎩
Ejercicio 22.- Encontrar todos los valores de a y b para los cuales (2,0,−1) es la única
solución del sistema 1 2 3
1 2 3
2 3
2 2 23
2 3 3
x ax xx x bx
x x
− + =⎧⎪ + − =⎨⎪ − =⎩
Ejercicio 23.- Hallar todos los valores de k para los cuales
M = {λ(1,1,0,0)+(2,0,−1,0) , λ ∈ R} es el conjunto de soluciones del sistema
1 2 3
2 22 4
3 4
2 0 ( 1) 2 1
( 1) 4 1
x x xk x x k
k x x k
− + =⎧⎪ − + = − +⎨⎪ + + = − −⎩

32
Ejercicio 24.- Determinar, para todos los valores reales de a y b, si el sistema cuya matriz
ampliada es 1 1 1
1 2 21
aa a a
a a b
−⎛ ⎞⎜ ⎟− − + −⎜ ⎟⎜ ⎟− −⎝ ⎠
es compatible determinado, compatible
indeterminado o incompatible.
Ejercicio 25.- Encontrar todos los valores de a y b para los cuales el sistema cuya matriz
ampliada es 1 1 1
1 1 11
aa
a a b
−⎛ ⎞⎜ ⎟− − −⎜ ⎟⎜ ⎟− −⎝ ⎠
tiene como conjunto solución una recta.
EJERCICIOS SURTIDOS
1. Sea A una matriz cuadrada que verifica A2 + A + I = 0.
Demostrar que A−1 = −I – A.
2. Determinar ,a b∈R para que (1, 1,2, 1)− − sea solución del sistema cuya matriz
aumentada es 1 2 1 2
2 2 0 2 24 5 4
aba b
−⎛ ⎞⎜ ⎟− −⎜ ⎟⎜ ⎟− −⎝ ⎠
.
Para los valores hallados resolver el sistema.
3. Se considera el sistema
1 2 3 4
1 2 3 4
1 2 3 4
1 2 3 4
2 3 3 22 1
02 3 5 7
− − − =⎧⎪ − + + + =⎪⎨ − + + =⎪⎪ − − − = −⎩
ax x cx xx ax bx cxx cx ax bx
bx ax cx x
Hallar los valores de , , ∈a b c R para los cuales (2, 1, 1,2)= − −X es solución del sistema.

Práctica 2
33
4. Encontrar una matriz X que satisfaga la ecuación
0 1 1 2 1 0
2 1 61 1 1 0 1 0
1 1 20 3 2 1 2 1
− − −⎛ ⎞ ⎛ ⎞−⎛ ⎞⎜ ⎟ ⎜ ⎟− =⎜ ⎟⎜ ⎟ ⎜ ⎟−⎝ ⎠⎜ ⎟ ⎜ ⎟−⎝ ⎠ ⎝ ⎠
X X
5. Se sabe que 110
⎛ ⎞⎜ ⎟−⎜ ⎟⎜ ⎟⎝ ⎠
y 311
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
son soluciones del sistema =Ax b . Hallar alguna solución de
=Ax b que también sea solución de 1 2 32 2 9− + =x x x .
6. Hallar todos los valores de ∈k R para los cuales el conjunto de soluciones del sistema
2 122 2
+ + =⎧⎪ + + =⎨⎪ + = −⎩
x ky zkx y kz k
y kz k es una recta contenida en el plano 4 2 4− + =x y z .
7. Se sabe que 211
⎛ ⎞⎜ ⎟−⎜ ⎟⎜ ⎟⎝ ⎠
es solución de 0
3 12
⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟−⎝ ⎠
Ax y que 120
⎛ ⎞⎜ ⎟−⎜ ⎟⎜ ⎟⎝ ⎠
es solución de 0
2 12
⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟−⎝ ⎠
Ax .
Encontrar cuatro soluciones distintas del sistema 012
⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟−⎝ ⎠
Ax .
8. Hallar todos los valores de a∈R tales que {(2,0,−3)} es el conjunto de soluciones del
sistema 1 2 3
1 2 32
1 2 3
53 3
x x xx ax xx x ax a
+ − =⎧⎪ + + =⎨⎪− + + =⎩
9. Sean 2 3 62 2 61 1 3
A−⎛ ⎞
⎜ ⎟= ⎜ ⎟⎜ ⎟⎝ ⎠
, 3 3B ×∈R una matriz inversible y 3 3C ×∈R tales que BC=A.
Hallar las soluciones del sistema 2 2B C B=x x 3( )∈Rx .

34
10. Hallar todos los valores de ,a b∈R para los cuales el sistema
1 2 3 4
1 2 3 4
1 2 3 4
3: 2 2 1
2 2
x x ax x bS x x ax x
x x x x b
+ + − =⎧⎪ + − + =⎨⎪ − + + =⎩
es compatible indeterminado.
Resolver el sistema para alguno de los valores hallados.
11. Sean 4 0 01 00 1 2
A k⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟⎝ ⎠
y 0 0 30 3 03 0 0
B⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟⎝ ⎠
.
Hallar todos los valores de k∈R para los cuales el sistema 2A B= −x x x tiene infinitas
soluciones. Resolver el sistema para alguno de los valores de k hallados.
12. Se sabe que (1,2,0) y (3,0,−1) son soluciones de un sistema no homogéneo S. Hallar una
solución de S que sea también solución del sistema 1 2
1 2 3
1 2 3
32 24 3 8
x xx x xx x x
+ =⎧⎪ + + =⎨⎪ + + =⎩
13. Sean en 4R los sistemas
1 2 4
1 1 2 3
1 2 3 4
3 12 2
3 3 2 3 5
x x xS x x x
x x x x
+ − = −⎧⎪ − + − =⎨⎪− + − + =⎩
y 1 22
1 3
2 4x xS
x ax b+ =⎧
⎨ + =⎩
Hallar todos los valores de ,a b∈R para los cuales S1 y S2 tienen infinitas soluciones
comunes. Para los valores hallados encontrar todas las soluciones comunes.

Práctica 3
35
PRÁCTICA 3 DETERMINANTES
DEFINICIONES Y PROPIEDADES
Una permutación del conjunto { }1, 2,..., n es un arreglo de estos números en cierto orden,
sin omisiones ni repeticiones. Para denotar una permutación cualquiera se escribirá
1 2( , ,..., )nj j j , donde ji es el i-ésimo elemento de la permutación. Se dice que ocurre una
inversión en una permutación 1 2( , ,..., )nj j j siempre que un entero mayor precede a uno
menor. Diremos que una permutación es par, si el número total de inversiones es un
número par, y diremos que es impar si el número total de inversiones es impar.
Sea n nA ×∈R ,
11 12 1
21 22 2
1 2
n
n
n n nn
a a aa a a
A
a a a
⎛ ⎞⎜ ⎟⎜ ⎟=⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
Por producto elemental tomado de A se entiende cualquier producto de n elementos
tomados de A, sin que dos cualesquiera de ellos provengan de una misma fila ni de una
misma columna.
Una matriz n nA ×∈R admite n! (n!=n(n−1)(n−2)...3.2.1) productos elementales. Estos son de
la forma 1 21 2 .....
nj j nja a a donde 1 2( , ,..., )nj j j es una permutación de { }1, 2,..., n .
Se denomina producto elemental con signo tomado de A a un producto elemental
1 21 2 .....nj j nja a a multiplicado por +1 ó por −1 según la permutación 1 2( , ,..., )nj j j sea
respectivamente par o impar.
Se define el determinante de A como la suma de todos los productos elementales con signo
tomados de A.
Notamos det( )A A= = ±∑ 1 21 2 .....nj j nja a a
Propiedades: Si A es una matriz cuadrada que contiene una fila de ceros, det( )A = 0.
Si A es una matriz triangular de n×n, det( )A es el producto de los elementos
de la diagonal, es decir det( )A = 11 22 ..... nna a a .
36
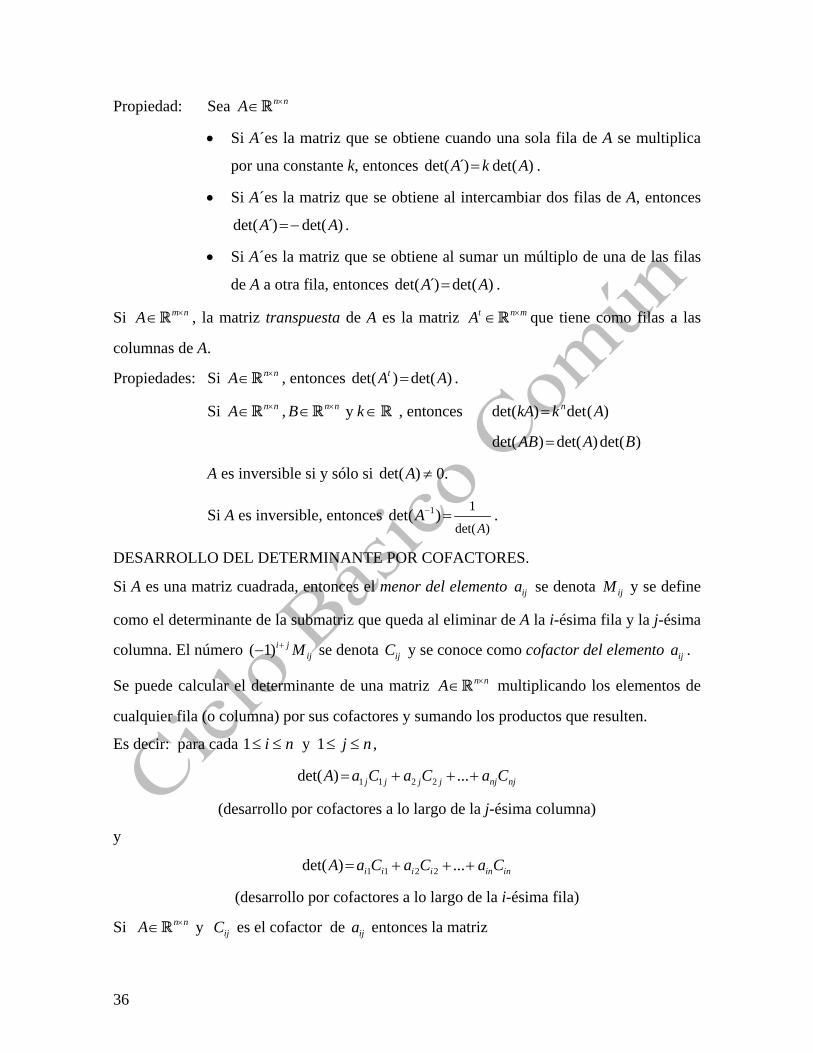
Propiedad: Sea n nA ×∈R
• Si A´es la matriz que se obtiene cuando una sola fila de A se multiplica
por una constante k, entonces det( ´) det( )A k A= .
• Si A´es la matriz que se obtiene al intercambiar dos filas de A, entonces
det( )́ det( )A A=− .
• Si A´es la matriz que se obtiene al sumar un múltiplo de una de las filas
de A a otra fila, entonces det( ´) det( )A A= .
Si m nA ×∈R , la matriz transpuesta de A es la matriz t n mA ×∈R que tiene como filas a las
columnas de A.
Propiedades: Si n nA ×∈R , entonces det( ) det( )tA A= .
Si , y n n n nA B k× ×∈ ∈ ∈R R R , entonces det( ) det( )nkA k A=
det( ) det( )det( )AB A B=
A es inversible si y sólo si det( )A ≠ 0.
Si A es inversible, entonces 1 1
det( )det( )
AA− = .
DESARROLLO DEL DETERMINANTE POR COFACTORES.
Si A es una matriz cuadrada, entonces el menor del elemento ija se denota ijM y se define
como el determinante de la submatriz que queda al eliminar de A la i-ésima fila y la j-ésima
columna. El número ( 1)i jijM+− se denota ijC y se conoce como cofactor del elemento ija .
Se puede calcular el determinante de una matriz n nA ×∈R multiplicando los elementos de
cualquier fila (o columna) por sus cofactores y sumando los productos que resulten.
Es decir: para cada 1 y 1 ,i n j n≤ ≤ ≤ ≤
1 1 2 2det( ) ...j j j j nj njA a C a C a C= + + +
(desarrollo por cofactores a lo largo de la j-ésima columna)
y
1 1 2 2det( ) ...i i i i in inA a C a C a C= + + +
(desarrollo por cofactores a lo largo de la i-ésima fila)
Si n nA ×∈R y ijC es el cofactor de ija entonces la matriz

Práctica 3
37
11 12 1
21 22 2
1 2
n
n
n n nn
C C CC C C
C C C
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
se conoce como matriz de cofactores tomados de A. La transpuesta de esta matriz se
denomina adjunta de A y se denota adj(A).
Propiedad: Si A es una matriz inversible, entonces 1 1
det( )adj( )
AA A− = .
REGLA DE CRAMER.
Si A =x b es un sistema de n ecuaciones con n incógnitas tal que det( )A ≠0, entonces la
única solución del sistema es 1 2( , ,..., )nx x x con
11
det( )det( )
AxA
= , 22
det( )det( )
AxA
= , ..... , det( )det( )
nn
AxA
=
donde jA es la matriz que se obtiene al reemplazar la j-ésima columna de A por b.
EJERCICIOS
Ejercicio 1.- Calcular los siguientes determinantes, desarrollando por cofactores por las
filas y columnas indicadas.
a)
2 0 5 10 2 4 20 0 1 51 3 3 0
por tercera filapor primera columna
b)
3 0 0 04 0 6 05 8 1 02 3 0 6
−−
−
por segunda filapor tercera columna
c)
5 0 1 0 02 0 3 1 01 1 0 0 00 0 1 0 01 0 3 0 1
−−
−
por cuarta filapor quinta columna

38
Ejercicio 2.- Calcular los siguientes determinantes, desarrollando por cofactores por la fila
o columna más conveniente.
a)
1 2 1 00 0 1 01 5 0 20 0 3 1
−−
−
b)
1 0 4 03 0 5 60 5 9 00 0 4 0
−
−
c) 2 0 54 0 10 0 7
d)
2 0 1 0 40 0 0 6 30 7 0 0 05 4 0 0 20 0 0 2 0
−
Ejercicio 3.- Calcular los determinantes de las siguientes matrices usando propiedades.
a) 2 0 13 2 20 0 0
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
b) 2 0 04 1 00 2 5
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
c)
1 0 0 0 00 2 0 0 00 0 3 0 00 4 0 4 01 0 0 0 5
⎛ ⎞⎜ ⎟−⎜ ⎟⎜ ⎟⎜ ⎟
−⎜ ⎟⎜ ⎟−⎝ ⎠
Ejercicio 4.- Determinar los valores de k para los cuales det(A) = 0.
a) 2 4
2 4k
Ak
+⎛ ⎞=⎜ ⎟− −⎝ ⎠
b) 2
2 10 1 20 0 2
kA k
k
⎛ ⎞⎜ ⎟= −⎜ ⎟⎜ ⎟−⎝ ⎠
c) 2
3 09 0
3 3 1
⎛ ⎞⎜ ⎟=⎜ ⎟⎜ ⎟⎝ ⎠
kA k
Ejercicio 5.- Sea 11 12 13
21 22 23
31 32 33
a a aA a a a
a a a
⎛ ⎞⎜ ⎟=⎜ ⎟⎜ ⎟⎝ ⎠
, tal que det(A) = 7.
Calcular los determinantes de las siguientes matrices.
a) 13 11 12
23 21 22
33 31 32
a a aa a aa a a
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
b) 11 12 11
21 22 21
31 32 31
a a aa a aa a a
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
c) 11 12 13
21 22 23
31 32 33
222
a a aa a aa a a
−⎛ ⎞⎜ ⎟−⎜ ⎟⎜ ⎟−⎝ ⎠
d) 11 12 13
21 11 22 12 23 13
31 32 33
3 3 3a a a
a a a a a aka ka ka
⎛ ⎞⎜ ⎟+ + +⎜ ⎟⎜ ⎟⎝ ⎠

Práctica 3
39
Ejercicio 6.- Sean 1 0 32 2 11 0 1
A⎛ ⎞⎜ ⎟= −⎜ ⎟⎜ ⎟−⎝ ⎠
y 2 1 10 1 80 0 1
B−⎛ ⎞
⎜ ⎟=⎜ ⎟⎜ ⎟−⎝ ⎠
.
Calcular det( )AB det( )A B+ 10det( )A 5 5det( )A B A−
Ejercicio 7.- Sin calcular la matriz inversa, decidir si son inversibles las matrices dadas.
a) 2 13 1⎛ ⎞⎜ ⎟−⎝ ⎠
b) 2 1 12 1 13 2 2
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
c) 2 3 10 0 11 1 1
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
d)
1 0 0 00 2 2 32 0 0 13 0 3 2
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
Ejercicio 8.- Determinar todos los valores reales de x para los cuales la matriz es inversible.
a) 1 2
2 2x
x+⎛ ⎞
⎜ ⎟−⎝ ⎠ b)
2 3 21 2 41 1x x
⎛ ⎞⎜ ⎟−⎜ ⎟⎜ ⎟+⎝ ⎠
c) 1 1 3
2 1 22 1 4
x
x
+ −⎛ ⎞⎜ ⎟−⎜ ⎟⎜ ⎟− −⎝ ⎠
Ejercicio 9.- Si 3 3 y det( ) 15A A×∈ =R , calcular
a) det(2 )A b) 1det((3 ) )A − c) 1det(3 )A−
Ejercicio 10.- Determinar en cada caso todos los valores de k∈R para los cuales el sistema tiene solución única.
a) 1 3
1 2
1 2 3
12 2 32 2
x xx xx x kx
+ =⎧⎪ + =⎨⎪ + + =⎩
b) 1 2 3
1 2 3
1 2 3
2 2 0(2 2) 2 0
( 2) ( 3) 2 0
x x xk x kx xk x k x x
− + =⎧⎪ − + + =⎨⎪ + + − + =⎩
c) 1 2 3
1 2 3
1 2
3 23 3
2 1
x x kxx kx xx x
− + =⎧⎪ + − =⎨⎪ + =⎩
Ejercicio 11.- Encontrar el valor de a para el cual el sistema tiene infinitas soluciones y resolver el sistema para el valor hallado.
1 2 3
22 3
1 2 3
2 44 0
3 3
x x xa x x
x x x a
− + = −⎧⎪ + =⎨⎪ + + =⎩

40
Ejercicio 12.- Determinar los valores de k para los cuales el sistema tiene: i) ninguna solución ii) solución única iii) infinitas soluciones
a) 1 3
1 2 32 2
1 3
12 2 3
( 3) 1
x xx x x
k x x k k
− + = −⎧⎪ + − =⎨⎪ − − = + −⎩
b) 1 2 3
1 2 32
1 2 3
2 32 3 2 2
4 ( 8) 14
x x xx x xx x k x k
+ + =⎧⎪ + + =⎨⎪ + + − = +⎩
c) 1 2 3
22 3
21 2 3
0( 1) ( 1) 1( 2) 2
− + =⎧⎪ − + + =⎨⎪ + + + =⎩
kx x xk x k x
kx k x x
Ejercicio 13.- Sea 2 0 22 11 0
A a aa
⎛ ⎞⎜ ⎟= +⎜ ⎟⎜ ⎟−⎝ ⎠
. Encontrar todos los valores de a para los cuales el
sistema A =x x admite solución no trivial.
EJERCICIOS SURTIDOS
1. Sea 3 3
1 0 10 1 4 y 2 3 2
A B ×
−⎛ ⎞⎜ ⎟= − ∈⎜ ⎟⎜ ⎟⎝ ⎠
R tal que det( ) 2.AB = Calcular 1det( )B− .
2. Sea 3 3
2 2 11 2 2 y 2 1 2
A B ×
⎛ ⎞⎜ ⎟= − ∈⎜ ⎟⎜ ⎟−⎝ ⎠
R tal que det( ) 3.B =−
Hallar todas las soluciones del sistema (BA)x = −Bx.
3. Sea 0 1
0 2 21 0 1
aA a
⎛ ⎞⎜ ⎟= −⎜ ⎟⎜ ⎟⎝ ⎠
. Decidir para qué valores de a el sistema
2( 2 )A A+ =x 0 tiene solución no trivial.
4. Sean
1 1 00 41 1 2
−⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟⎝ ⎠
A k y
2 1 11 10 1 2
⎛ ⎞⎜ ⎟= −⎜ ⎟⎜ ⎟⎝ ⎠
B k .
Hallar todos los ∈k R tales que 1 1det( ) det( )4
− =BA BA .

Práctica 4
41
PRÁCTICA 4
ESPACIOS VECTORIALES – SUBESPACIOS
DEFINICIONES Y PROPIEDADES
ESPACIOS VECTORIALES
Un espacio vectorial real V, o espacio vectorial sobre R, es un conjunto de elementos
llamados vectores, junto con dos operaciones: suma y producto por un escalar, que satisfacen las siguientes propiedades. EV1.- Si u ∈ V y v ∈ V, entonces la suma u + v ∈ V.
EV2.- Si k ∈ R y v ∈ V, entonces el producto kv ∈ V.
EV3.- Si u, v y w ∈ V, entonces (u+v)+w = u+(v+w)
EV4.- Existe un elemento en V, notado 0, tal que 0+u = u+0 = u para todo u ∈ V.
EV5.- Para cada elemento u ∈ V existe –u ∈ V tal que u+(–u) = –u+u = 0.
EV6.- Si u y v ∈ V, entonces u+v = v+u.
EV7.- Si u y v ∈ V y c ∈ R, entonces c(u+v) = cu+cv.
EV8.- Si a y b ∈ R y v ∈ V, entonces (a+b)v = av+bv.
EV9.- Si a y b ∈ R y v ∈ V, entonces (ab)v = a(bv).
EV10.- Si u ∈ V, entonces 1u = u (1 ∈ R)
Notación: u–v = u+(–v)
Si V es un espacio vectorial real valen las siguientes propiedades.
a) 0v = 0 para todo v ∈ V.
b) k0 = 0 para todo k ∈ R.
42
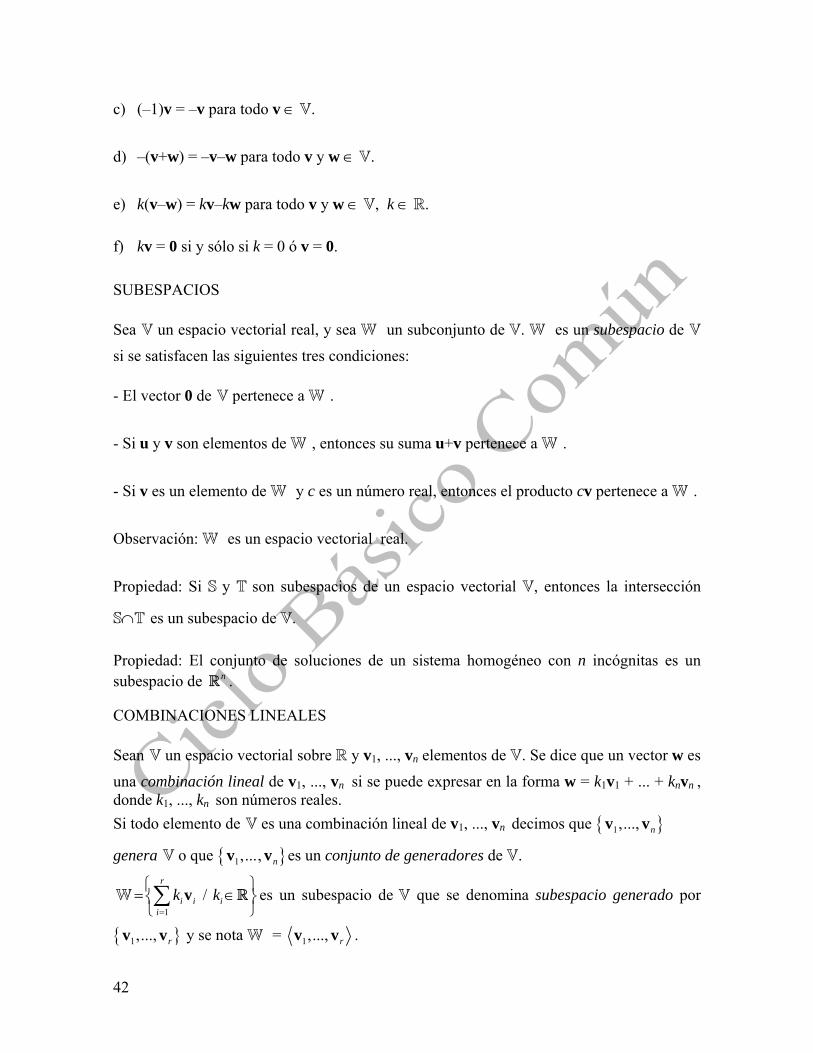
c) (–1)v = –v para todo v ∈ V.
d) –(v+w) = –v–w para todo v y w ∈ V.
e) k(v–w) = kv–kw para todo v y w ∈ V, k ∈ R.
f) kv = 0 si y sólo si k = 0 ó v = 0.
SUBESPACIOS
Sea V un espacio vectorial real, y sea W un subconjunto de V. W es un subespacio de V
si se satisfacen las siguientes tres condiciones:
- El vector 0 de V pertenece a W .
- Si u y v son elementos de W , entonces su suma u+v pertenece a W .
- Si v es un elemento de W y c es un número real, entonces el producto cv pertenece a W .
Observación: W es un espacio vectorial real.
Propiedad: Si S y T son subespacios de un espacio vectorial V, entonces la intersección
S∩T es un subespacio de V.
Propiedad: El conjunto de soluciones de un sistema homogéneo con n incógnitas es un subespacio de nR .
COMBINACIONES LINEALES
Sean V un espacio vectorial sobre R y v1, ..., vn elementos de V. Se dice que un vector w es
una combinación lineal de v1, ..., vn si se puede expresar en la forma w = k1v1 + ... + knvn , donde k1, ..., kn son números reales. Si todo elemento de V es una combinación lineal de v1, ..., vn decimos que { }1,..., nv v
genera V o que { }1,..., nv v es un conjunto de generadores de V.
1
/r
i i ii
k k=
⎧ ⎫= ∈⎨ ⎬⎩ ⎭∑ v RW es un subespacio de V que se denomina subespacio generado por
{ }1,..., rv v y se nota W = 1,..., rv v .

Práctica 4
43
Propiedad: Si W es un subespacio de V y 1,..., rv v son vectores de W , entonces
1,..., rv v ⊆ W . O sea 1,..., rv v es el menor subespacio de V que contiene a los vectores
1,..., rv v .
DEPENDENCIA E INDEPENDENCIA LINEAL
Sea V un espacio vectorial sobre R, y sean 1,..., nv v elementos de V.
Decimos que { }1,..., nv v es linealmente dependiente si existen números reales 1,..., na a , no todos iguales a cero, tales que 1 1 ... n na a+ + =v v 0 .
Decimos que { }1,..., nv v es linealmente independiente si y sólo si se satisface la siguiente condición: siempre que 1,..., na a sean números reales tales que 1 1 ... n na a+ + =v v 0 , entonces
1 ... 0na a= = = .
Propiedad: Sea V un espacio vectorial sobre R, y sean 1 2 3 4, , ,v v v v vectores de V. Son
equivalentes:
a) { }1 2 3 4, , ,v v v v es linealmente independiente.
b) { }1 2 3 4, , , con , 0, es linealmente independiente.k k k∈ ≠v v v v R
c) { }1 2 2 3 4, , , con , es linealmente independiente.k k+ ∈v v v v v R
Propiedad: Si { }1 2, ,..., nv v v es linealmente independiente y 1 2, ,..., n∉w v v v entonces
1 2, ,..., ,nv v v w es linealmente independiente.
Propiedad: Si w es combinación lineal de 1 2, ,..., kv v v , entonces
1 2 1 2, ,..., , , ,...,k k=v v v w v v v .
El rango fila de una matriz A es igual al máximo número de filas linealmente independientes de A.
El rango columna de una matriz A es igual al máximo número de columnas linealmente independientes de A.
Propiedad: El rango fila de A es igual al rango columna de A, y lo notamos rgA.
De aquí en más, cuando decimos espacio vectorial entenderemos espacio vectorial sobre R.

44
BASES
Una base de un espacio vectorial V es una sucesión de elementos 1,..., nv v de V tales que:
a) { }1,..., nv v genera V
b) { }1,..., nv v es linealmente independiente
Se dice que un espacio vectorial V, diferente de cero, es de dimensión finita si contiene una
sucesión finita de vectores que forman una base de V.
Propiedad: Dos bases cualesquiera de un espacio vectorial V de dimensión finita tienen el
mismo número de vectores. Si V es un espacio vectorial de dimensión finita, la dimensión de V es el número de
vectores que tiene cualquier base de V. Si V= ⎨0⎬, entonces V no tiene base y se dice que
su dimensión es cero.
Propiedad: La dimensión de { }10 / 0n A×= ∈ =x xRS , es igual a n rgA− .
SUMA DE SUBESPACIOS
Sea V un espacio vectorial, y sean S y T subespacios de V; se define la suma de S y
T como S + T = { }/ , con y ∈ = + ∈ ∈v v s t s tV S T .
Propiedades: a) S + T es un subespacio de V.
b) Si dimV = n, entonces dim(S+T) = dimS + dimT − dim(S∩T).
Sea V un espacio vectorial. Si S y T son subespacios de V que verifican simultáneamente:
S+T = V y S∩T = ⎨0⎬, entonces V es la suma directa de S y T, y se nota V = S⊕T.
En general, si W ⊆ V verifica W = S + T y S∩T = ⎨0⎬, se dirá que W es la suma
directa de S y T , y se notará W = S⊕T.
COORDENADAS
Sea V un espacio vectorial, y B = { }1,..., nv v una base de V. Si 1 1 ... n na a= + +v v v ,
entonces ( )1 ,..., na a son las coordenadas de v con respecto a la base B, y notamos
( ) ( )1B,..., na a=v

Práctica 4
45
Observación: Las coordenadas de un vector dependen de la base. Recuerde que cuando se da una base { }1,..., nv v , importa el orden en que se dan los vectores.
ESPACIO EUCLÍDEO
Llamamos espacio euclídeo de dimensión n al espacio vectorial Rn con el producto
interno 1 2 1 2 1 1 2 2( , ,..., ) ( , ,..., ) ...n n n nx x x y y y x y x y x y⋅ = + + + .
Si S es un subespacio de Rn , el conjunto { }/ 0 para todo n∈ ⋅ = ∈x x s sR S se llama el
complemento ortogonal de S y se nota ⊥S .
Propiedades: ⊥S es un subespacio de Rn .
{ }.⊥∩ = 0S S
dim dim y .nn⊥ ⊥= − ⊕ =RS S S S
( )⊥ ⊥ =S S
Si 1 2, ,..., r= v v vS , w es ortogonal a v para todo v∈S si y sólo si
0 para 1 .i i r⋅ = ≤ ≤w v
Observación: Si { }1 2, ,..., es una base de rv v v S , para hallar ⊥S basta buscar n-r vectores
linealmente independientes que sean ortogonales a todos los vi.
Si 1 2 1 2 1 con y ,⊥= + ∈ ∈v s s s s sS S se llama la proyección ortogonal de v sobre S.
Propiedad: La proyección ortogonal de v sobre S es el punto de S que está a menor
distancia de v, es decir que 1 .− ≤ − ∀ ∈v s v s s S
EJERCICIOS
Ejercicio 1.- Determinar cuáles de los siguientes conjuntos son subespacios.
a) ( ){ }31 2 3 1 2 3, , / 2 0= ∈ − + =x x x x x xRW
b) ( ){ }21 2 1 2, / 0x x x x= ∈ + ≤RW

46
c) { }2 211 22/ 0A a a×= ∈ + =RW
d) ( ){ }21 2 1 2, / 0x x x x= ∈ ⋅ =RW
e) { }3 / (1, 2,1),= ∈ = − ∈v vR RW λ λ
f) 2 1 1 1/ .
2 1X X X×⎧ − ⎫⎛ ⎞
= ∈ =⎨ ⎬⎜ ⎟⎝ ⎠⎩ ⎭
RW
g) { }/ . 0n= ∈ =v w vW R donde w es un vector fijo de nR .
h) El plano Π que contiene a los puntos (2, 4, 1)− − , (6, 4,5) y (5,2,3) .
Ejercicio 2.- Decidir cuáles de los vectores dados pertenecen al subespacio S.
a) (1, 2, 4)= −S 1 1
4 2( , ,1)= −u ; (2, 4,4)= −v ; (0,0,0)=w
b) (1, 1,3) , (2,1, 1)= − −S (0, 3,2)= −v ; ( 1, 5,11)= − −w
c) (1, 1, 2, 4) , (2,1,3, 1), (0, 2,1,0)= − − −S (3, 2,4,3)=v ; (0, 1,0,1)= −w
Ejercicio 3.- Hallar a∈R para que el vector w pertenezca al subespacio S .
a) (1, 2,1), ( 1,3, 2)= −S (2, ,0)a=w
b) (1,0,0,1), (0, 2,1, 1), (1, , 1,0)a= − −S (1, 1,2,3)= −w
Ejercicio 4.- Decidir si el conjunto de vectores dado genera V.
a) V=R3 { }(1,1,1) , (3, 2,1) , (1,1,0) , (1,0,0)
b) V=R3 { }(1, 2, 1) , (0,1, 1) , (2,5, 3)− − −
c) V=R4 { }(1, 1,0,1) , (1, 1, 1, 2) , (0,1, 2,1) , (1,3,1,3)− − −
d) V=R2×2 1 0 1 1 1 0
, ,0 2 1 1 1 0
⎧ − ⎫⎛ ⎞ ⎛ ⎞ ⎛ ⎞⎨ ⎬⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎩ ⎭

Práctica 4
47
Ejercicio 5.- Hallar un conjunto de generadores del subespacio S.
a) { }31 2 3/ 4 0x x x= ∈ − + =x RS
b) { }51 2 5 2 3 4/ 4 2 0x x x x x x= ∈ + − = + − =x RS
c) 2 2 1 1 1 1/ . .
2 1 2 1×⎧ ⎫⎛ ⎞ ⎛ ⎞
= ∈ =⎨ ⎬⎜ ⎟ ⎜ ⎟− −⎝ ⎠ ⎝ ⎠⎩ ⎭X X XRS
d) 2 2 1 2/ . 0, con
2 4X A X A×⎧ − ⎫⎛ ⎞
= ∈ = =⎨ ⎬⎜ ⎟−⎝ ⎠⎩ ⎭RS
Ejercicio 6.- Encontrar un sistema de ecuaciones cuyo conjunto de soluciones sea S.
a) (1,0,1)=S
b) (0,1, 2, 1) , (1,0,1,0)= −S
c) (1,1,1,1) , (2,1,0, 1) , (1,0,1,1)= −S
d) 1 2 1 1 0 1
, ,0 1 2 0 1 0
−⎛ ⎞ ⎛ ⎞ ⎛ ⎞= ⎜ ⎟ ⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠ ⎝ ⎠S
Ejercicio 7.- Estudiar la dependencia o independencia lineal del conjunto de vectores.
a) { }(2,1, 2) , (1, 3,0) , (5, 1, 4)− −
b) 1 3 1 3 0 1 0 2
, , ,3 1 0 3 1 0 1 1
⎧ − − ⎫⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞⎨ ⎬⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟− − −⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎩ ⎭
c) { }(5, 4,3, 2,1)
d) { }(0, 2,1, 1), (1,0,0,1), (1,3, 2,1), (2,1, 3, 4)− − −
Ejercicio 8.- Determinar los valores reales de k para los cuales el conjuntos de vectores es
linealmente independiente.
a) { }(0,1, 2) , (1, 1, ) , (1, 3,0)k− − −
b) { }(1, 1,3) , ( , 1, 4) , ( 1, 1, )k k k k k k− + + + +

48
c) 1 0 1 2 1 1 2 3
, , ,0 1 2 0 0 0
k kk k k
⎧ − + − − ⎫⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞⎨ ⎬⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟− −⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎩ ⎭
Ejercicio 9.- Sea { }1 2 3, ,v v v un conjunto de vectores linealmente independientes.
a) Determinar si { }1 2 3, ,w w w es un conjunto linealmente independiente.
i) 1 1 32= +w v v ; 2 1 2 32 3= − +w v v v ; 3 2 32= +w v v
ii) 1 1 2 3= + −w v v v ; 2 1 22 3= −w v v ; 3 2 35 2= −w v v
b) ¿para qué valores de α es { }1 3 1 2 2 3, 3 , 3− + +v v v v v vα α linealmente independiente?
Ejercicio 10.- Hallar base y dimensión de los siguientes subespacios.
a) { }21 2/ 6 2 0x x= ∈ − =x RS
b) { }31 2 3/ 3 0x x x= ∈ + − =x RS
c) { }41 3 1 2 4 1 2 3 4/ 2 2 2 0x x x x x x x x x= ∈ − = + + = − − − =x RS
d) 4 1
1 0 1 1/ 0 1 2 1
2 1 4 1
×
⎧ ⎫⎛ ⎞⎪ ⎪⎜ ⎟= ∈ − =⎨ ⎬⎜ ⎟⎪ ⎪⎜ ⎟−⎝ ⎠⎩ ⎭
RS x x 0
e) 2 2 1 2 1 2/
1 1 1 1X X X×⎧ ⎫⎛ ⎞ ⎛ ⎞
= ∈ =⎨ ⎬⎜ ⎟ ⎜ ⎟− −⎝ ⎠ ⎝ ⎠⎩ ⎭S R
f) (1, 2,3) , (3,1,0)=S
g) 3
2(2,8, 3) , ( 1, 4, )= − − −S
h) (1, 1, 2,1) , (2,1,1,1), (1, 2, 1,0), (0,1,1,1)= − −S
i) 2 1 1 0 0 1 3 1
, , ,1 0 1 2 1 4 2 2
−⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞= ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟− − −⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠
S

Práctica 4
49
Ejercicio 11.- Decidir si el conjunto de vectores dado es base del subespacio
{ }41 2 4/ 2 0x x x= ∈ − + =x RS .
a) { }(1,1,0,0) , (0, 2,0,1)
b) { }(1,1,0,0) , (0, 2, 1,1) , (2,0,0, 1)− −
c) { }(1,1,0,0) , (0, 2, 1,1) , (1, 1,0,1)− −
d) { }(1,1,0,0) , (0, 2, 1,1) , (3,1,1, 1)− −
Ejercicio 12.-Sea { }41 2 3/ 2 0x x x= ∈ − + =x RS . Hallar una base B de S tal que todos
los vectores de B tienen todas sus coordenadas distintas de 0.
Ejercicio 13.- Determinar la dimensión de kT para todos los valores de k∈R .
a) (0, 1, ) , (1, 1,0) , ( 3,0,1)k k= − − −T
b) 1 2 3 4 1 3 1 2 3 42 , , 2 3 2k k= + − + − + − +v v v v v v v v v vT , donde
{ }1 2 3 4, , ,B = v v v v es una base de un espacio vectorial V.
Ejercicio 14.- Extender, si es posible, el conjunto de vectores a una base de 2 2×R .
a) 1 0 3 1
,1 0 1 0
⎧ − ⎫⎛ ⎞ ⎛ ⎞⎨ ⎬⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠⎩ ⎭
b) 1 1 0 2 1 1
, ,3 2 1 1 1 1
⎧ − ⎫⎛ ⎞ ⎛ ⎞ ⎛ ⎞⎨ ⎬⎜ ⎟ ⎜ ⎟ ⎜ ⎟− −⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎩ ⎭
c) 1 1 0 1 3 2
, ,1 1 1 2 4 5
⎧ − ⎫⎛ ⎞ ⎛ ⎞ ⎛ ⎞⎨ ⎬⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎩ ⎭
Ejercicio 15.- Hallar una base de V que contenga a una base de S.
a) 4=RV { }41 2 3 2 4/ 0x x x x x= ∈ − + = − =x RS
b) 3 2×=RV { }3 211 31 12 21 22 11 22 32/ 0X x x x x x x x x×= ∈ + = − + = − + =RS
c) 5=RV (1, 2,0,1, 1) , (2,1,1,0,0) , (1, 1,1, 1,1)= − − −S

50
Ejercicio 16.- Extender, si es posible, el conjunto { }(1, 1,0,1) , (0,1,0, 1)− − a base de 4R
con vectores del subespacio T.
a) { }42 4/ 0x x= ∈ + =x RT
b) { }41 3/ 0x x= ∈ + =x RT
Ejercicio 17.- Extraer, si es posible, dos bases de V, del conjunto de vectores dado.
a) V=R3 { }(1,0, 1) , (0,1,1) , (1,1,0) , (2,1, 4)−
b) V=R3 { }(2,0,0) , (0, 1, 4) , (2,1, 4) , (1, 1, 4)− − −
c) V=R2×2 1 1 1 1 1 1 1 0 1 2, , , ,
1 1 1 0 0 0 0 0 3 4⎧ ⎫⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞⎨ ⎬⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎩ ⎭
Ejercicio 18.- Determinar si los subespacios S y T son iguales.
a) (1,0, 2) , (1,1, 1)= −S { }31 2 3/ 2 3 0x x x= ∈ − − =x RT
b) (0,1,0) , (1,1,3)=S (2, 2,6) , (1,1,1)=T
c) { }41 2 3 4 1 4/ 2 0x x x x x x= ∈ + − − = + =x RS
{ }41 2 3 1 2 4 1 2 3 4/ 3 2 2 0x x x x x x x x x x= ∈ + − = − + = + − − =x RT
d) (1, 1,0, 2)= −S { }41 2 3 2 4 3/ 2 0x x x x x x= ∈ + + = + = =x RT
e) { }2 211 22 11 12/ 2 0A a a a a×= ∈ + = + =RS
2 1 1 0;
0 2 0 1⎛ ⎞ ⎛ ⎞
= ⎜ ⎟ ⎜ ⎟− −⎝ ⎠ ⎝ ⎠T
Ejercicio 19.- Hallar base y dimensión de ∩S T .
a) { }41 2 3 4 2 3 4/ 2 2 0x x x x x x x= ∈ + − + = + − =x RS { }4
1 4/ 2 0x x= ∈ + =x RT
b) { }41 2 3 2 4/ 2 0x x x x x= ∈ − + = + =x RS ( 1,0,1,1), ( 2, 2,1, 4)= − − −T

Práctica 4
51
c) { }41 2 3 4/ 2 2 3 0x x x x= ∈ + − + =x RS (1, 1,0,0), (0,1, 1,0), (0,1,0, 1)= − − −T
d) 1 1 0 1 0 0
, ,2 1 1 1 1 1−⎛ ⎞ ⎛ ⎞ ⎛ ⎞
= ⎜ ⎟ ⎜ ⎟ ⎜ ⎟− −⎝ ⎠ ⎝ ⎠ ⎝ ⎠S { }2 2
11 21 22/ 0A a a a×= ∈ + − =RT
e) (2,1,0) , (1,1, 1)= −S (0,1, 2) , (1,3, 1)= −T
Ejercicio 20.- Hallar base y dimensión de +S T .
a) (1, 1,0,1) , (2,1,1,1)= −S (3,0, 2, 2)=T
b) (2,1, 1) , (1,0,3)= −S { }31 2 3/ 2 0x x x= ∈ + + =x RT
Ejercicio 21.- Sean { }41 2 4 1 3 4/ 2 2 0x x x x x x= ∈ + − = − + =x RS y
(1,3,1, 1);(0,1, 2, 2)= − − −T .
a) Hallar una base de +S T .
b) Escribir (3,5,7,1)=v como = +v s t , con ∈s S y ∈t T , de dos maneras distintas.
Ejercicio 22.- Sean { }31 2 3/ 0x x x= ∈ + + =x RS , (0,1, 2);(1, 1,1)= −T y (3,1,2)=v .
Hallar ∈s S y ∈t T tales que ,∈v s t .
Ejercicio 23.- Sean { }41 2 4 1 3/ 2 0x x x x x= ∈ − + = + =x RS y
{ }42 3 1 3 4/ 2 3 3 0x x x x x= ∈ + = + + =x RT . Hallar una base de R4 que contenga a una base
de S y a una base de T.
Ejercicio 24.- Sea { }1 2 3 4, , ,B = v v v v base de un espacio vectorial V y sean
1 2 2 32 ,= + +v v v vS y 3 4 1 2 4,= + + +v v v v vT .
a) Hallar base y dimensión de ∩S T y de +S T .
b) Hallar un vector +∈v S T tal que ∉v S y ∉v T .

52
Ejercicio 25.- Decidir si + =HS T .
a) { }41 3 2 3 4/ 2 0x x x x x= ∈ + = − − + =x RS , (1, 2,1,0);(0,0,1, 1)= −T ,
{ }41 2 3 4/ 0x x x x= ∈ − + + =x RH
b) { }53 4 1 5 1 2 5/ 2 2 0x x x x x x x= ∈ − = + = + − =x RS , (1, 2,1,1,0);(0,1, 2,3,1)= −T ,
{ }51 2 5/ 2 0x x x= ∈ + − =x RH
c) (1,0,1,3);(2, 2, 2,3)=S , (3, 2,3,6);(0,0,1,0)=T , (1,1,0, 1);(2,1,1, 2);(0,1,1,1)= −H
Ejercicio 26.- Hallar dos subespacios distintos T y T´ tales que ´= ⊕ = ⊕V S T S T .
a) 4=RV (1, 2,1,0) , ( 1,3,1,1)= −S
b) 5=RV { }51 3 4 5 1 2 2 3 4 5/ 2 3 2 0x x x x x x x x x x= ∈ − + + = − = + + − =x RS
c) { }41 2 3 4/ 2 0x x x x= ∈ + + − =x RV (1, 1,0, 1) , (1, 1,1,0)= − − −S
Ejercicio 27.- Sean 1 0 1 1
,0 1 2 0⎛ ⎞ ⎛ ⎞
= ⎜ ⎟ ⎜ ⎟−⎝ ⎠ ⎝ ⎠S y { }2 2
11 12 21/ 0A a a a×= ∈ = − =RT .
a) Probar que 2 2× = ⊕R S T .
b) Escribir 3 3
como con y 5 0
⎛ ⎞= = + ∈ ∈⎜ ⎟−⎝ ⎠
w w s t s tS T .
Ejercicio 28.- Sean { }31 2 3 2 3/ 2 0x x x x x= ∈ + + = − =x RS y
{ }31 2 3 1 2/ 2 0x x x x x= ∈ + − = + =x RT . Hallar un subespacio W tal que
3 y ⊆ = ⊕RT W S W .
Ejercicio 29.- Sea { }42 1 3/ 0x x x= ∈ = + =x RS .
Encontrar un subespacio 4⊆T R que verifique simultáneamente:
4(1,0, 1,1) y ∩ = − + =RS T S T .

Práctica 4
53
Ejercicio 30.- Sean { }41 3 4 1 2 3 4/ 0x x x x x x x= ∈ + − = + + + =x RS y
{ }41 2 3 4 1 2 3 4/ 2 0x x x x ax bx cx dx= ∈ + + + = + + + =x RT
Determinar todos los valores reales de a, b, c, d para los cuales la suma +S T no es
directa.
Ejercicio 31.- Sean { }51 2 3 4 5/ 2 0x x x x x= ∈ − − + − =x RH ,
{ }51 2 3 4 5´ / 2 0x x x x x= ∈ + + + + =x RH , (1,0,0,1,0);(0,0,1,0,0);(1, 1,1,1,1)= −W ,
{ }51 2 3 4 5/ 2 0x x x x x= ∈ − − = − =x RS y { }5
1 2 3 4 5´ / 2 0x x x x x= ∈ + = + + =x RS .
Encontrar un subespacio 5⊂RT que verifique simultáneamente:
⊕ =HS T ; ´ ´⊕ =HS T ; { }0∩ ≠T W .
Ejercicio 32.- Encontrar todos los vectores de 3R que son ortogonales a todos los vectores del conjunto { }(1,0, 1);( 1,1,3)− − .
Ejercicio 33.- Encontrar el complemento ortogonal del subespacio S .
a) { }41 2 3 4 1 4/ 2 0x x x x x x= ∈ + + − = + =x RS .
b) (1,1,3);(2,1, 1)= −S
c) (2,1, 2,0);(1,0, 2,1);(3,1, 4,1)=S
Ejercicio 34.- En 3R , encontrar el complemento ortogonal de:
a) el eje x;
b) el plano coordenado yz;
c) el plano de ecuación 1 2 33 2 0x x x+ − = ;
d) la recta de ecuación ( 1,2,5)X λ= − .

54
Ejercicio 35.- Sea (2,0,0,3,1);(0,1,1, 1,0)= −S . Hallar una base de ⊥S , y dar un sistema de ecuaciones cuyo conjunto de soluciones sea el subespacio S .
Ejercicio 36.- a) Sean 1 2 3: 6 4 0x x xΠ + − = y P = (7,5,9). Hallar el punto Q∈Π que está más próximo al punto P. Calcular la distancia del punto P al plano Π .
b) Sean : ( 2,4,1)λ −L y P = (4,1,─8). Hallar el punto Q∈L que está más próximo al punto P. Calcular la distancia del punto P a la recta L .
Ejercicio 37.- Sean en R3 las bases B={ }(1,0,0) , (0,1,0) , (0,0,1)
B´={ }(0,0,1) , (1,0,0) , (0,1,0) y B´´={ }(3,1, 2) , (0,1, 1) , (2,0,0)− −
Hallar las coordenadas con respecto a las bases B, B´ y B´´ de:
a) (4,1,−3)
b) 31 2 3( , , )x x x ∈ R
Ejercicio 38.- Hallar las coordenadas de la matriz 1 13 2
−⎛ ⎞⎜ ⎟⎝ ⎠
en la base
B=1 2 0 1 1 1 1 1
, , ,1 1 1 2 0 1 0 3
⎧ − ⎫⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞⎨ ⎬⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟−⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎩ ⎭
Ejercicio 39.- Sea B={ }1 2 3, ,v v v una base de R3. Determinar si { }1 2 3, ,w w w es
linealmente independiente, si 1 2 3, ,w w w son los vectores de R3 cuyas coordenadas
respecto de B son:
a) (2,3,−1), (0,−2,1) y (0,0,3) respectivamente.
b) (3,1,−1), (1,0,2) y (5,1,3) respectivamente.

Práctica 4
55
Ejercicio 40.- Sea B={ }1 2 3 4, , ,v v v v una base de R4 y sea
1 2 3 1 4 1 2 3 4, , 3 2k k= + + − + + +v v v v v v v v vT .
Determinar todos los valores de k en R para los cuales dim 3k =T .
Ejercicio 41.- Se sabe que B={ }1 2 3, ,w w w es una base de R3 y que las coordenadas de los
vectores (0,─1,1), (1,0,1) y (1,1,─1) en la base B son, respectivamente, (1,2,2), (1,1,─1) y (─1,─1,0). Hallar la base B.
Ejercicio 42.- Sea { }31 2 3/ 2 0= ∈ + − =x x xx RS . Hallar una base B de R3 que contenga a
una base de S y a una base de ⊥S , y tal que que vector (0,5,2) tenga coordenadas (0,1,4) en la base B.
EJERCICIOS SURTIDOS
1. Sea { }1 2 3 4; ; ;=B v v v v una base de un espacio vectorial V . Sean 1 3 4 22 ;= − −v v v vS
y 1 2 3 4 1 2 3 4 1 2 3 4; 2 ;= − + + + − + − − + −k k kv v v v v v v v v v v vT .
Hallar todos los valores de ∈k R para los cuales ⊕ =S T V .
2. Sean (1, 2,0,1);(0, 1,1,0)= −S y { }41 2 3 4 1 3 4/ 2 0= ∈ − + − = − − =x x x x x x xxT R .
Hallar, si existe, un subespacio W de modo que se verifique simultáneamente:
dim( ) 1∩ =S W ; dim( ) 1∩ =T W ; dim(( ) ) 1+ ∩ =S T W ; dim 2=W
3. Sean en 4R los subespacios (2,1,0,1)=S , { }41 2 3 4/ 2 0= ∈ − + − =x x x xxH R y
{ }41 2 4 2 3 4/ 2 0= ∈ + + = − + =x x x x x xxW R .
Hallar, si es posible, un subespacio T que verifique simultáneamente:
⊕ =S T H y {0}∩ ≠T W .

56
4. Sean (1, 2,1,0);(0,3,0, 2)=S y (1,1,1,1);(3, 1,3, 4)= −T . Hallar una base de 4R que
contenga a una base de ⊥S y a una base de T .
5. Sean en 4R los subespacios (1,0,1, 2);(1,1,0, 1)= −W ,
{ }41 1 2 3 4/ 2 0= ∈ − + − =x x x xxH R y { }4
2 1 2 3 4/ 0= ∈ + − + =x ax x bxxH R .
Hallar , ∈a b R y un subespacio S tales que se verifique simultáneamente:
1⊕ =W S H y 2⊥ ⊕ =W S H .
6. Sean { }51 1 2 3 1 5/ 2 0;4 0x x x x x= ∈ + + = + =xS R y
{ }5 2 22 1 2 3 4 5 1 2 3 4 5 2 3 4/ 3 0; 2 5 3 0; 2 0x x x x k x x x x x k x x x kx= ∈ + − + − = + − + − = − + =xS R .
Hallar todos los k∈R para los cuales 1 2⊥=S S .
7. Sean { }1 2 3; ;=B v v v , { }2 3 1 3 2' ; ;= + − −B v v v v v y { }2 3 1 3 1'' ; ;= − + + −B v v v v v
bases de un espacio vectorial V y sean y v w tales que (1, 1,1)= −Bv y ' (2,0, 1)= −Bw .
Hallar "(2 )+ Bv w .
8. Sean en 4R el subespacio { }42 3 4 1 2 3 4/ 2 0= ∈ + − = + + + =x x x x x x xxS R y la base
{ }(1,1,1,1);(1,1, 2,0);(1, 2,0,0);(2,0,0,0)=B .
Hallar todos los vectores v que pertenecen a S y cuyas coordenadas en la base B son de la
forma (a,b,a,b).
9. Sean en 4R los subespacios { }1 2 4 2 3/ 2 0x x x x x= ∈ + + = + =4x RS y
(5,5, 1, 1);(3,1,0, 1)= − − −T . Hallar un subespacio W de 4R , ≠W T de manera que se
verifique simultáneamente: ∩ =S W ∩S T y + =S W +S T .

Práctica 4
57
10. Sea { }1 2 3 4, , ,B = v v v v base de un espacio vectorial V.
Sean 1 2 3 4 2 3 42 2 ,= + − + − +v v v v v v vS y 1 2 3 1 32 ,= + + +v v v v vT .
Hallar un subespacio tal que ( )⊂ ⊕ ∩ =W V W S T V .
11. Sea (1,1,0, 2);(0, ,1, 1);(1,0, 1, ); (0, 1, 1, 2)a b b= − − − − −S .
Hallar todos los valores de a y b tales que (1, 1,1,0)⊥ = −S .
12. Sean (1, 2,1,1)=S , { }41 1 2 3 4/ 2 0x x x x= ∈ − − + =x RH y
{ }42 1 2 3 4/ 2 0x x x x= ∈ − + − + =x RH .
Hallar, si es posible, una base de 4R que contenga a una base de S , a una base de 1H y a
una base de 2H simultáneamente.
13. Sean (1, 1,0,0);(0,0,0,1);( ,0,1, 1)a= − −W y (1,1,1,0);(2,0,1,1)=S .
Determinar a∈R y un subespacio H de dimensión 2, tal que ⊥+ =S H W .
14. Sean (1, 1,1,0); (0, 2, 1, 2)= − − −S , { }41 2 4/ 0x x x= ∈ + + =x RH y la base
B={(1,0,1,0); (0,1,0,1); (0,2,0,0); (1,0,−1,0)}.
Hallar un subespacio 4 de RT tal que ⊕ =T S H , y para todo ∈v T , las coordenadas de v
en la base B son de la forma (a,b,a,b).
15. Sean { }3 311 22 33/ 0A a a a×= ∈ + + =RT , 3 3 , I×⊂ =RS S donde I es la matriz
identidad. Calcular dim( )+S T .
Si 1 2 01 2 21 1 3
B⎛ ⎞⎜ ⎟= −⎜ ⎟⎜ ⎟− −⎝ ⎠
, hallar y tales que S T B S T∈ ∈ = +S T .

58
16. La matriz 2 36 3⎛ ⎞⎜ ⎟⎝ ⎠
tiene coordenadas (1,2,0,3) en la base
1 0 0 0 0 1; ; ;
1 1 0 1 1 0a b
Bc d
⎧ ⎫⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞= ⎨ ⎬⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎩ ⎭. Calcular las coordenadas de
1 33 2−⎛ ⎞⎜ ⎟−⎝ ⎠
en la base B
17. Sean B={(1,−1,0,2);(0,1,2,0);(−2,1,−1,0);(0,0,0,1)} y
{ }1 2 4 2 3 4/ 2 0x x x x x x= ∈ − + = − − =4x RS . Hallar todos los 4∈v R tales que ∈v S y las
coordenadas de v en la base B son de la forma (a,0,b,0).

Práctica 5
59
PRÁCTICA 5
TRANSFORMACIONES LINEALES
DEFINICIONES Y PROPIEDADES
Sean V y W espacios vectoriales sobre R. Una transformación lineal f : V → W es una
función que satisface las siguientes dos propiedades:
TL1: Si u ∈ V y v ∈ V, f (u + v) = f (u) + f (v)
TL2: Si k ∈ R y u ∈ V, f (ku) = kf (u)
Son transformaciones lineales:
La función nula 0: V → W dada por 0(v) = 0, para todo v ∈ V.
La función identidad id : V → V, dada por id(v) = v, para todo v ∈ V.
Propiedades: Cualquier transformación lineal f : V → W satisface:
a) f (0) = 0
b) f (–v) = –f (v) para todo v ∈ V
c) f (v – w) = f (v) – f (w) para todos v y w ∈ V
d) f (a1v1 + a2v2 + ... + anvn) = a1 f (v1) + a2 f (v2) + ... + an f (vn) para todos ai∈R, vi ∈ V
Si f : V → W, S ⊂ V, T ⊂ W, w ∈ W , notamos:
f (S) = { w ∈ W / w = f (s) , con s ∈ S }
f –1(w) = { v ∈ V / f (v) = w }
f –1(T) = { v ∈ V / f (v) ∈ T }
Propiedades:
Si S es subespacio de V, entonces f (S) es subespacio de W.
Si T es subespacio de W, entonces f –1(T) es subespacio de V.

60
Teorema. Si { v1, v2, ..., vn } es una base de V, y w1, w2, ..., wn son vectores (no necesa -
riamente distintos) en W, entonces hay una única transformación lineal f : V → W tal que
f (v1) = w1, f (v2) = w2, ..., f (vn) = wn.
Este teorema nos dice que una transformación lineal está completamente determinada por
los valores que toma en una base.
Si f : V → W es una transformación lineal, llamamos:
• núcleo de f al conjunto Nu f = { v ∈ V / f (v) = 0 }
• imagen de f al conjunto Im f = { w ∈ W / w = f (v) , con v ∈ V }
Observación: Im f = f (V).
Propiedades: Si f : V → W es una transformación lineal, entonces:
a) Nu f es un subespacio de V.
b) Im f es un subespacio de W.
c) Si {v1, v2, ..., vn} es un conjunto de generadores de V, entonces {f (v1), f (v2), ..., f (vn)}
es un conjunto de generadores de Im f .
d) Si {f (v1), f (v2), ..., f (vr)} es linealmente independiente, entonces {v1, v2, ..., vr} es
linealmente independiente.
Decimos que una transformación lineal f : V → W es:
• monomorfismo si es inyectiva, esto es, si verifica “f (v) = f (w) ⇒ v = w”.
• epimorfismo si es suryectiva, esto es, si Im f = W.
• isomorfismo si es biyectiva, es decir, si es monomorfismo y epimorfismo.
Propiedades: Si f : V → W es una transformación lineal, entonces:
a) f es monomorfismo ⇔ Nu f = {0}.

Práctica 5
61
b) Si f es monomorfismo y { v1, v2, ..., vr } es linealmente independiente, entonces
{ f (v1), f (v2), ..., f (vr) } es linealmente independiente.
c) f es isomorfismo si y sólo si: “Si { v1, v2, ..., vn } es base de V, entonces
{ f (v1), f (v2), ..., f (vn) } es base de W”.
Teorema de la dimensión
Si f : V → W es una transformación lineal, entonces
dim V = dim Nu f + dim Im f
Propiedades:
Si f : V → W y g : W → U son transformaciones lineales, la composición g f : V → U,
dada por (g f )(v) = ( ( ))g f v , es transformación lineal.
Si f : V → W es isomorfismo, la función inversa f –1: W → V , que cumple 1f f − = idW y f –1 f = idV, es isomorfismo.
Si f : V → W y g : W → U son isomorfismos, g f es isomorfismo y se verifica: 1 1 1( )g f f g− − −= .
Una transformación lineal p : V → V es un proyector si p p p= .
Propiedad: Si p : V → V es un proyector, entonces
• V = Nu p ⊕ Im p
• Para todo v ∈ Im p, p(v) = v
Dada la transformación lineal f : Rn → Rm, existe una única matriz A ∈ Rm×n tal que f
puede escribirse en la forma
1
21 2( , , , )n
n
xx
f x x x A
x
⎛ ⎞⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟= ⎜ ⎟⎜ ⎟⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜⎝ ⎠
… , ó f (x) = Ax

62
Esta matriz A tal que f (x) = Ax se denomina matriz de la transformación lineal f , y
escribimos ( )A M f= .
Propiedad: Las columnas de ( )M f son un conjunto de generadores de Im f .
Si A ∈ Rm×n ,
el rango columna de A es la dimensión del subespacio generado por las columnas de A ;
el rango fila de A es la dimensión del subespacio generado por las filas de A .
Teorema: Si A ∈ Rm×n, entonces
rango fila de A = rango columna de A
Esta igualdad nos permite hablar de rango de A, que notaremos rg A.
Propiedad: dim Im f = rg ( )M f .
Teorema: Si A ∈ Rm×n, la dimensión del subespacio de soluciones de Ax = 0 es n – rg A.
Sean B = { v1, ..., vn } base de un espacio vectorial V de dimensión n y B′ = { w1, ..., wm}
base de un espacio vectorial W de dimensión m.
Si f : V → W es una transformación lineal y f (vj) = a1jw1 + ... + amjwm, 1≤j≤n ,
llamamos matriz asociada a f en las bases B y B′, a la matriz de m×n:
11 12 1
21 22 2´
1 2
( )
n
nBB
m m mn
a a aa a a
M f
a a a
⎛ ⎞⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟= ⎜ ⎟⎜ ⎟⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜⎝ ⎠
Notar que en la columna j de ´( )BBM f están las coordenadas de f (vj) en base B′.

Práctica 5
63
La matriz ´( )BBM f es tal que si v ∈ V, ´ ´( )( ) ( ( ))BB B BM f f=v v .
Observación: Si f : Rn → Rm y E y E′ son las respectivas bases canónicas,
´ ( ) ( )EEM f M f= .
Notación: Si W = V y B′ = B, escribimos ( )BM f en lugar de ´( )BBM f .
Propiedad: rg ´( )BBM f = dim Im f ; de esto se deduce que el rango de una matriz asociada a
una transformación lineal no depende de las bases elegidas.
Propiedad: Matriz de la composición:
Sean U, V y W espacios vectoriales, y sean B, B′ y B″ bases de U, V y W respectivamente.
Si f : U → V y g : V → W son transformaciones lineales, se tiene:
´´ ´ ´́ ´( ) ( ) ( )BB B B BBM g f M g M f=
Propiedad: Si f : V → W es un isomorfismo y B y B′ son bases de V y W respectivamente, 1 1
´ ´( ) ( ( ))B B BBM f M f− −= .
Si B y B′ son dos bases del espacio vectorial V, llamamos matriz de cambio de base de B a
B′, a la matriz ´ ´( )BB BBC M id= .
Propiedad: 1´ ´( )B B BBC C −=
Propiedad: Si f : V → V es una transformación lineal y B y B′ son bases de V,
´ ´ ´( ) ( )B BB B B BM f C M f C=
o, en virtud de la propiedad anterior, 1
´ ´ ´( ) ( ) ( )B B B B B BM f C M f C−=

64
EJERCICIOS
Ejercicio 1.- Determinar si la función f es transformación lineal.
a) f : R3 → R2 , f (x1, x2, x3) = (x1 – x2, 2x1)
b) f : R2 → R3 , f (x1, x2) = (x1⋅ x2, 0, 0)
c) f : R2 → R3×2 , f (x1, x2) = 1 1 2
1
0 00
x x x
x
⎛ ⎞− ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎟⎜−⎝ ⎠
d) f : R2×3 → R3×2 , f (A) = At
Ejercicio 2.- Hallar la expresión de la transformación lineal f.
a) f : R3 → R4 tal que f (1,0,0) = (2,1,–1,1), f (0,1,0) = (3,–1,1,0) y f (0,0,1) = (0,0,4,1).
b) f : R3 → R3 tal que f (1,1,–1) = (0,3,1), f (1,0,1) = (2,–1,1) y f (1,1,0) = (3,2,4).
c) f : R2 → R2×2 tal que f (1,–1) =2 13 0
⎛ ⎞⎜ ⎟⎝ ⎠
y f (1,1) =0 12 1⎛ ⎞⎜ ⎟⎝ ⎠
.
Ejercicio 3.- Decidir si existe una transformación lineal f que satisface:
a) f : R3 → R2 , f (1,−2,0) = (3,4) , f (2,0,1) = (−1,1) , f (0,4,1) = (−7,−7)
b) f : R3 → R3 , f (1,1,1) = (2,3,4) , f (0,1,1) = (1,2,1) , f (1,2,2) = (1,1,5)
c) f : R2 → R3 , f (1,1) = (2,1,1) , f (1,0) = (0,2,0) , f (5,2) = (4,8,2)
Ejercicio 4.- Hallar una base y la dimensión de Nu f y de Im f .
a) f : R3 → R3 , f (x1, x2, x3) = (x1 + x2 + x3, x1 − x2, 2x2 + x3)
b) f : R4 → R4 , f (x1, x2, x3, x4) = (x1 + x3, 0, x2 +2x3, −x1 + x2 + x3 )
c) f : R3 → R2×2 , f (x1, x2, x3) = 2 3 1 3
1 2 2 3
x x x xx x x x− +⎛ ⎞
⎜ ⎟+ −⎝ ⎠
Ejercicio 5.- Sea f : R3 → R2 la transformación lineal f (x1, x2, x3) = (x1 – x2, x2 + x3)
y sean v = (2,3) ; S = (1, 2,1) ; T = { x ∈ R2 / 3x1 – 2x2 = 0 }.
Hallar f (S), f –1(v) y f –1(T).

Práctica 5
65
Ejercicio 6.- Calcular dim Nu f y dim Im f .
a) f : R3 → R5 monomorfismo b) f : R4 → R3 epimorfismo
c) f : R4 → R4 f (x) =2x
Ejercicio 7.- Sea B = {v1, v2, v3} una base de V. Sea f : V → V una t.l. tal que: f (v1) = v1 – v2 – v3 ; f (v2) = av2 + v3 ; f (v3) = v1 + v2 + av3.
Determinar todos los valores de a para los cuales f no es monomorfismo. Para cada uno de
ellos calcular el núcleo de f.
Ejercicio 8.- Definir una transformación lineal que verifique las condiciones enunciadas.
a) f : R2 → R2 tal que Nu f = { x ∈ R2 / x1 + 2x2 = 0 }, Im f = (1,0)
b) f : R4 → R4 tal que Nu f = { x ∈ R4 / x1 + x2 + x4 = x2 + x3 = 0 }
c) f : R3 → R4 tal que (1,1,2) ∈ Nu f , Im f = (1,0,1,1), (2,1,0,1)
d) f : R4 → R2 tal que (1,0,1,3) ∈ Nu f y f es epimorfismo
e) f : R4 → R4 tal que Nu f = Im f = (2,1, 1,0), (0,1,0,1)−
f) f : R3 → R3 tal que f no es monomorfismo y (1,1,1) ∈ Im f
g) f : R4 → R4 tal que Nu f = Im f y f (3,2,1,–1) = f (–1,2,0,1) ≠ 0.
Ejercicio 9.- Sean S1 = { x ∈ R4 / 2x1 – x2 + x3 – x4 = 0 ; x1 – 3x3 + x4 = 0 } ;
S2 = { x ∈ R4 / 2x1 – x2 – x3 + x4 = 0 } ; T1 = (1,0,1), (0,1,1) ; T2 = (2,1,3), (0,0,1) .
Hallar una transformación lineal f : R4 → R3 que verifique simultáneamente:
f (S1) ⊆ T1 ; f (S2) ⊆ T2 ; dim Nu f = 1.
Ejercicio 10.- Hallar h = g f , t = f g y determinar el núcleo y la imagen de f, g, h y t.
a) f : R3 → R2 , f (x1, x2, x3) = (x1, x1 + x2 – x3), g : R2 → R3 , g (x1, x2) = (x1– x2, x1, x2).
b) f : R3 → R3 la transformación lineal tal que
f (0, 0, 1) = (0, –1, 1) , f (0, 1, 1) = (1, 0, 1) , f (1, 1, 1) = (1, 1, 0)
g : R3 → R3 , g (x1, x2, x3) = (2x1 + x3, x2 – x3, 2x1 + x2)

66
Ejercicio 11.- Hallar la función inversa del isomorfismo f.
a) f : R3 → R3 f (1, 1, –1) = (1, –1, 1) , f (2, 0, 1) = (1, 1, 0) , f (0, 1, 0) = (0, 0, 1)
b) f : R2 → R2 f (x1, x2) = (x1 , x1 – x2)
c) f : R2×3 → R3×2 f (A) = At
Ejercicio 12.- Sea S = { x ∈ R4 / x1 + x2 = 0, x3 + x4 = 0, x1 – x3 + x4 = 0 }.
Definir una t.l. f : R4 → R4 tal que S ⊂ Nu f ∩ Im f y f (1,0,1,0) = (1,0,1,0).
Ejercicio 13.- Sea g : R3 → R4 la t.l. g (x1, x2, x3) = (x1 – x2, x3, –x1 + x3, x1).
Definir, si es posible, una t.l. f : R4 → R4 tal que:
f ≠ 0 , f g = 0 y Nu f + Im f = R4
Ejercicio 14.- Sean S = { x ∈ R4 / x1 – x2 – x3 = x1 + x3 – x4 = 0} y
T = { x ∈ R4 / 2x1 – x2 – x4 = 0}.
Definir una t. l. f : R4 → R4 que verifique simultáneamente Nu f = S y Nu f f = T.
Ejercicio 15.- Definir un proyector p tal que
a) p : R2 → R2 , Nu p = ( 1, 2)− e Im p = ( 1,1)− .
b) p : R3 → R3 , Nu p = (1,1, 2)− . ¿Es único?
c) p : R4 → R4 , Nu p = (1,1,1,1), ( 1,0,1,1), (1, 2,3,3)− , Im p = (1, 2,0,1), ( 1,1, 4, 2)−
Ejercicio 16.- Escribir la matriz ( )M f .
a) f : R3 → R2 f (x1, x2, x3) = (x1 + 4x2 – 3x3, x1 + x3)
b) f : R2 → R4 f (x1, x2) = (x1 + x2, 2x1 + x2, x1 + 3x2, x1)
c) f : R3 → R4 tal que f (1,0,0) = (2,–3,1,1); f (0,1,0) = (2,1,3,2); f (0,0,1) = (0,–1,–2,1).
d) f : R3 → R3 tal que f (2,0,0) = (4,2,2) ; f (0,4,0) = (1,1,1) ; f (0,0,3) = (0,0,–1).

Práctica 5
67
Ejercicio 17.- Sea f : R3 → R3 tal que ( )M f = 1 2 13 1 22 0 2
−⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟− −⎝ ⎠
.
a) Calcular f (1, 2, 1); f (5, 7, 2); f (0, 0, 1).
b) Hallar bases de Nu f e Im f.
Ejercicio 18.- En cada caso hallar ´ ( )BBM f .
a) f : R3 → R3 f (x1, x2, x3) = (2x1 + x2, x1 – x3, x1 +2x2 + x3)
B = B′ = E
b) f : R2 → R2 f (x1, x2) = (x1 – 2x2, x1)
B = {(–1,0), (1,1)} B′ = {(1,1), (0,1)}
c) f : R3 → R2 f (x1, x2, x3) = (x1 – x2, x1 + x2 + x3)
B = {(1,–1,2), (0,2,–1), (0,0,1)} B′ = {(2,1), (1,–1)}
d) f : R4 → R3 f (x1, x2, x3, x4) = (x1 – x3, 2x4, x2 + x3)
B = {(1,–1,2,0), (0,2,–1,1), (0,0,2,1), (0,0,0,–1)} B′ = E Ejercicio 19.- Sean B = {v1, v2, v3}, B′ = {v1 + v2, v2 + v3, v1 + v3} y
B′′ = {(1,–2,1), (0,1,1), (1,3,1)} bases de R3, y sea f : R3 → R3 la t.l. tal que
f (v1) = (2,–3,2), f (v2) = (0,2,3), f (v3) = (1,2,0).
Hallar ( )BEM f , ´́ ( )BBM f , ´ ( )B EM f y ´ ´́ ( )B BM f .
Ejercicio 20.- Sea f : V → V tal que ( )BM f = 1 4 52 1 00 3 1
−⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
y sean B = {v1, v2, v3} y
B′ = {–v1 + v2 – v3, v1 + 2v3, v2} bases de V. Hallar ´ ( )B BM f , ´ ( )BBM f y ´ ( )BM f .
Ejercicio 21.- Sea f : R2×2 → R2×2 la t.l. definida por f (X) = AX con A = 2 13 1
−⎛ ⎞⎜ ⎟⎝ ⎠
.
Calcular ( )EM f .

68
Ejercicio 22.- Sea f : R3 → R4 tal que ´( )BBM f =
1 1 11 0 21 2 00 1 1
−⎛ ⎞⎜ ⎟−⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
, con
B = {(0,0,2), (0,1,–1), (2,1,0)} y B′ = {(1,0,0,0), (1,1,1,0), (1,–1,0,1), (0,1,1,1)}
a) Calcular f (0,2,–1)
b) Hallar una base de Im f y una base de Nu f. Ejercicio 23.- Sea p : R2 → R2 un proyector que no es idénticamente nulo y es distinto de
la identidad. Probar que existe una base B de R2 tal que ( )BM f = 1 00 0⎛ ⎞⎜ ⎟⎝ ⎠
.
Ejercicio 24.- Sea f : R4 → R3 la transformación lineal tal que la matriz de f en las bases
B = {v1, v2, v3, v4} y B′ = {w1, w2, w3} es ´( )BBM f = 1 3 1 02 2 1 11 1 1 1
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟− −⎝ ⎠
.
a) Calcular: f (v1 – 2v3) ; f (v3 + v4)
b) Dar bases de Nu f e Im f.
c) Calcular f –1(w1)
Ejercicio 25.- Sea f : R3 → R3 tal que ´( )BBM f = 1 1 00 2 11 0 a
−⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
con
B = {(1,1,1), (1,1,0), (1,0,0)} y B′ = {(1,1,1), (0,1,1), (0,0,1)}.
Hallar todos los valores de a para los cuales f (1,2,1) = (0,1,–6). Ejercicio 26.-
a) Sea f : R3 → R3 tal que ( )M f = 2 4
2 11 1
kkk
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟−⎝ ⎠
.
Encontrar todos los valores de k para los cuales f no es un monomorfismo.

Práctica 5
69
b) Sean B = {v1, v2, v3} base de R3, y f : R3 → R3 la transformación lineal tal que
( )BM f = 1 2 53 1 22 3a
⎛ ⎞⎜ ⎟−⎜ ⎟⎜ ⎟−⎝ ⎠
. Hallar todos los valores de a tales que f es isomorfismo.
Ejercicio 27.- Sea B = {v1, v2, v3} base de R3, y sea f : R3 → R3 la transformación lineal
tal que ( )BM f = 1 3 21 2 32 1 1
⎛ ⎞⎜ ⎟−⎜ ⎟⎜ ⎟−⎝ ⎠
.
Hallar todos los a ∈ R para los cuales 2a2v1 + 2v2 + 3av3 ∈ Im f. Ejercicio 28.- Sean B = {v1, v2, v3} y B′ = { v1 – v3, 3v1 + 2v2, v1 + v2 + v3 } bases de R3.
Sea f : R3 → R3 tal que ( )BM f = 1 0 31 1 00 2 1
⎛ ⎞⎜ ⎟−⎜ ⎟⎜ ⎟⎝ ⎠
. Hallar ´ ( )B BM f y ´ ( )BBM f .
Ejercicio 29.- Sea f : R3 → R3 tal que ´( )BBM f = 1 0 21 2 01 1 1
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟− − −⎝ ⎠
con B = {(1,1,1),(0,1,–1),(0,0,–1)} y B′ = {(1,–1,0),(0,0,1),(0,1,2)}.
Si S = {x ∈ R3 / 5x1 – 2x2 – 2x3 = 0 }, hallar un subespacio T de R3 tal que R3 = T ⊕ f(S).
Ejercicio 30.- Sean B = {(1,–1), (1,2)}, B′ = {(1,1,–1), (1,–1,0), (–1,0,0)} y las
transformaciones lineales f : R2 → R2 , f (x1, x2) = (x1 – x2, x1 + 2x2)
g : R3 → R2 , tal que ´ ( )B EM g = 1 0 11 2 3
⎛ ⎞⎜ ⎟−⎝ ⎠
y h : R2 → R3 , tal que ´( )BBM h = 1 01 02 2
⎛ ⎞⎜ ⎟−⎜ ⎟⎜ ⎟⎝ ⎠
Hallar ( )M f f , ( )BEM g h y ´ ( )B BM f g .

70
Ejercicio 31.- Sea B = {v1, v2, v3} una base de R3 y sea f : R3 → R3 la t.l. tal que
( )BM f = 0 2 10 0 10 0 0
−⎛ ⎞⎜ ⎟−⎜ ⎟⎜ ⎟⎝ ⎠
.
a) Calcular 1(3 )f f v , 1 2( 2 )f f −v v y 3( )f f v
b) Hallar dim Nu ( )f f y dim Im ( )f f y dar una base de cada uno.
Ejercicio 32.- Sean B = {v1, v2, v3} base de V y B′ = {w1, w2, w3} base de W.
Sean f : V → V y g : V → W t.l. tales que:
( )BM f = 0 1 12 1 12 1 1
−⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
y ´( )BBM g = 2 1 11 0 02 1 1
−⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟−⎝ ⎠
a) Calcular 1 2 3(2 3 )g f + −v v v .
b) Hallar una base de Nu ( )g f y una base de Im ( )g f .
Ejericio 33.- Sea f : R2 → R2 la t.l. dada por f (x1, x2) = (x1 + 2x2, 3x1 – x2).
a) Hallar 1( )M f −
b) Hallar 1´ ( )B BM f − con B = {(1,1), (2,1)} y B′ = {(–1,2), (0,1)}.
Ejercicio 34.- Sea f : R3 → R3 tal que ( )M f = 1 1 02 1 10 2 1
⎛ ⎞⎜ ⎟−⎜ ⎟⎜ ⎟− −⎝ ⎠
y sea
B = {(1,0,2), (0,1,1), (2,1,0)}. Hallar ( )BEM f , ( )BM f y 1( )BEM f − .
Ejercicio 35.- Sean f : V → V tal que ( )BM f = 2 1 21 0 01 3 0
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟−⎝ ⎠
y g : V → V tal que
´ ( )BM g = 3 1 01 2 10 1 1
−⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
, con B = {v1, v2, v3} y B′ = {v3, v2 + v3, v1 + v2 + v3} bases de V.
Hallar ´( )BBM g f , ´ ( )B BM g f y 1´( )BBM g − .

Práctica 5
71
EJERCICIOS SURTIDOS
1. Definir una t.l. f : R4 → R4 que verifique simultáneamente:
i) Nu f ∩ Im f = (1,1,1,1) ii) (1,5,1,0) ∈ Im f iii) (3,1,2,2) ∉ Im f + Nu f.
2. Sean S1 y S2 subespacios de R3 tales que dim S1 = 1, dim S2 = 2 y S1 ⊕ S2 = R3.
Demostrar que si f : R3 → R3 es una t.l. tal que f (S1) = S1 y f (S2) = S2 y B = {v1, v2, v3}
es una base de R3 tal que {v1} es base de S1 y {v2, v3} es base de S2, entonces
( )BM f = 0 0
00
ab cd e
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
con a ≠ 0 y b cd e
≠ 0.
3. Sea f : R4 → R4 una t.l. que satisface:
0f f = ; f (1,0,0,0) = (1,2,2,–1) ; f (0,1,0,0) = (0,–1,1,0).
Calcular ( )M f .
4. Sea f : R3 → R3 una transformación lineal tal que ( )M f = 2 1 05 18 2
kk
−⎛ ⎞⎜ ⎟−⎜ ⎟⎜ ⎟−⎝ ⎠
.
Hallar todos los valores de k ∈ R para los cuales Nu f ≠ {0} y Nu f ⊆ Im f. 5. Sean { }4
1 2 3 4 1 3 4/ 2 3 0x x x x x x x= ∈ − + − = − + =x RS y
{ }41 2 4/ 2 0x x x= ∈ − − =xH R .
Hallar una transformación lineal f : R4 → R4 que verifique simultáneamente:
f (S) ⊂ S ; Im f = H ; Nu ( )f f = S. 6. Sean en 4R los subespacios (1, 2, 1, 2)= −S , (0, 2,3, 2);(1, 1,1, 2)= −W y
{ }41 2 3 4/ 0= ∈ − + + =x x x xxT R .
Definir, si es posible, un isomorfismo 4 4: →f R R que satisfaga simultáneamente:
( )+ = +f S T S W ; { }( ) 0∩ =f S S ; { }( ) 0∩ =f S W .

72
7. Sea f: R4→ R4 1 2 3 4 1 2 3 3 4 1 2 4 1 2 3( , , , ) ( 2 , , 2 , 2 4 2 )= + + − + + + + +f x x x x x x x x x x x x x x x .
Definir, si es posible, una transformación lineal g: R4→ R4 que verifique
simultáneamente: Im ( ) Im=f g f y 0=g f .
8. Sea f : R5 → R4 la t.l. dada por ( )M f =
2 1 2 4 11 0 1 2 03 1 3 6 11 6 1 2 0
−⎛ ⎞⎜ ⎟− −⎜ ⎟⎜ ⎟− −⎜ ⎟⎜ ⎟−⎝ ⎠
a) Hallar una base B1 para Nu f y encontrar un conjunto B2 de vectores de R5 tal que
B = B1 ∪ B2 es una base de R5.
b) Probar que los transformados de los vectores de B2 por f, son linealmente
independientes y extender este conjunto a una base B′ de R4.
c) Calcular ' ( )BBM f . 9. Sean { }4
1 2 3/ 0= ∈ + + =x x xxS R y (2,0,1,1);(1,1,1,1);(1, 2,0,1)=T
Definir, si es posible, una t. l. f: R4→ R4 que verifique simultáneamente
( ) ( )=f fS T y dim(Nu ) 1=f .
10. Sean en 4R los subespacios (1,0, 1,1);(1,1,0, 1)= − −W y
{ }41 3 4/ 0x x x= ∈ − − =xH R y sea en 3R el subespacio { }3
1 2 3/ 2 0x x x= ∈ + − =x RS .
Definir, si es posible, una transformación lineal 4 3:f →R R que satisfaga
simultáneamente: ( )f =H S ; ( )f ⊥=W S ; (1,1, 1,1) (2, 2, 3)f − = − − .
11. Sean S = { }4
1 2 3 4/ 0x x x x∈ + + + =x R y f: R4→ R4 la t.l. dada por
1 2 3 4 1 4 2 4 1 2 1 2 4( , , , ) ( , , , 2 )f x x x x x x x x x x x x x= − − − − − .
Definir, si es posible, una t.l. g: R3→ R4 tal que Nu ( )f g = <(−1,0,2)> e Im g = S.
12. Sean { }(1,1,1);(1,1,0);(1,0,0)=B y { }' (0,0,1);(0,1,1);(1,1,1)=B bases de 3R y sea
3 3: →f R R la t.l. tal que '
1 3 0( ) 1 0 3
2 2 4
⎛ ⎞⎜ ⎟= −⎜ ⎟⎜ ⎟−⎝ ⎠
BBM f . Calcular f -1(2,2,5).

Práctica 5
73
13. Sea {(1,1,0,0);(0,1,1,0);(1,0,0,1);(0,0,0,1)}B = y sea 4 4:f →R R una
transformación lineal tal que
1 1 10 1 1 0
( )1 0 0 0
1 1 1
BE
a
M f
b
⎛ ⎞⎜ ⎟−⎜ ⎟=⎜ ⎟⎜ ⎟
− − −⎝ ⎠
.
Determinar a y b si se sabe que (2,3,1, 1) (2,1,2,4)f − = y dim(Nu ) 1f = .
14. Sean { }1 2 3; ;B = v v v y { }1 2 2 3 1 3' ; ;= + + +B v v v v v v bases de un e.v. V ;
f : →V V la transformación lineal tal que ´
2 1( ) 1 0 3
1 1 2
−⎛ ⎞⎜ ⎟= −⎜ ⎟⎜ ⎟⎝ ⎠
BB
aM f y 2 35= +v v v .
Determinar ∈a R tal que dim(Im ) 2=f , y para el a hallado decidir si Im∈ fv .
15. Sea 3 3: →f R R la transformación lineal tal que '
1 0 2( ) 1 2 0
1 1 1
⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟−⎝ ⎠
BBM f , con
{(1,1,1);(0,1, 1);(0,0, 1)}= − −B y ' {(1, 1,0);(0,0,1); }= −B v bases de 3R .
Hallar v para que (0,0, 1) (2, 3, 2)− = − −f .Dar una base de ( )f S , si ( 1,1,0)= −S .
16. Sean f: R3→ R3 dada por 1 2 3 1 2 1 2 3 2 3( , , ) ( , 4 , 2 )= + − + −f x x x x x x x x x x y g: R3→ R3
la t. l. tal que 1 1 2
( ) 0 1 10 3 2
−⎛ ⎞⎜ ⎟= −⎜ ⎟⎜ ⎟−⎝ ⎠
BM g , con { }(0,0, 1);(1, 1, 2);(0,1,3)= − −B .
Calcular (3, 1, 3)− −f g .
17. Sean { }1 2 3; ;=B v v v y { }2 3 1 2 3 1 2' ; ;= − − + + −B v v v v v v v bases de un e.v. V y sea
: →f V V la t.l. tal que '
1 2 1( ) 2 1 2
1 3 3
−⎛ ⎞⎜ ⎟= −⎜ ⎟⎜ ⎟− −⎝ ⎠
BBM f . Hallar una base de Im( )f f .

74
18. Sean { }1 2 3; ;B = v v v y { }1 2 3 2 3 3' ; ;= + + +B v v v v v v bases de un e.v. V y
f : →V V la transformación lineal tal que ´
1 1 0( ) 0 0 0
0 1 1
−⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟⎝ ⎠
BBM f .
Hallar, si es posible, una base " de B V tal que "
0 1 0( ) 0 0 0
0 0 1
⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟⎝ ⎠
BM f .
19. Sea f : R4 → R3 la t.l. f (x1, x2, x3, x4) = (x1 + x3 – x4, x1 + x2 + x4, 2x1 + x2 + x3).
Hallar una t.l. g : R3 → R4, no nula, que satisfaga simultáneamente:
0f g = y 0g f = . 20. Definir una transformación lineal f: R4→ R4 que verifique simultáneamente:
i) { }1 4Nu Im / 3 0f f x x+ = ∈ − =4x R
ii) dim Im f = dim Nu f
iii) f (1,2,0,1) = 2f (1,0,1,2) = −2f (0,0,0,1)
21. Sean { }4
1 2 4 2 3 4/ 2 3 0x x x x x x= ∈ − + + = + + =x RS ; ' (1,5, 2,1), (0, 2, 2, 2)=S ;
{ }1 2/ 0x x= ∈ − =4xT R y ' (1, 2,0,0), (1,1,1,1), (1,0,0,0)=T .
Definir una t.l. 4 4:f →R R que verifique simultáneamente:
i) ( )f ⊆S T ii) ( ') 'f ⊆S T iii) dim ( ') dim( ')f + = +S S S S
22. Sea f: R3→ R4, 1 2 3 1 3 1 2 3 2( , , ) ( 2 , , , )f x x x x x x x x x= + + y sean
S = <(1,0,1); (0,−1,1)> y v=(1,3,−1).
Definir una t. l. g: R4→ R3 tal que h = gof satisfaga h(v) ∈ S y dim(Nu h)=1.
23. Sea g: R3→ R2 la t.l. 1 2 3 1 2 2 3( , , ) ( ,3 )g x x x x x x x= + −
Definir un proyector p: R3→ R3 tal que 0g p = .

Práctica 5
75
24. Sea B={(2,1,−1); v; w} base de R3 y f: R3→ R3 la t.l. tal que1 2 1
( ) 0 1 31 3 2
EBM f−⎛ ⎞
⎜ ⎟= ⎜ ⎟⎜ ⎟⎝ ⎠
Hallar v y w si se sabe que f (6,−3,1) = (1,2,1) y f (5,−2,1) = (1,−1,0).
25. Sea { }3
1 2/ 2 0x x= ∈ − =x RS . Sea B={(1,1,1); (1,1,0); (1,0,0)} y f :R3 →R3 tal que
( )BEM f = 2 2
1 0 08 8 8
1 1a a
a a a
⎛ ⎞⎜ ⎟− + − + −⎜ ⎟⎜ ⎟− −⎝ ⎠
.
Hallar todos los valores de a para los cuales {f (0,1,2); f (–1,0,4)} es base de S.
26. Sean B = {v1, v2, v3+v1, v4} una base de R4, S = < v1, v2 , v3 > y f : R4 → R4 dada por
( )BM f =
0 1 1 01 2 0 11 3 1 12 2 2 0
−⎛ ⎞⎜ ⎟−⎜ ⎟⎜ ⎟−⎜ ⎟⎜ ⎟−⎝ ⎠
. Hallar la dimensión y una base de f (S) ∩ Nu f.
27. Sea f: R3 →R3 tal que 2 1 0
( ) 5 18 2
M f kk
−⎛ ⎞⎜ ⎟= −⎜ ⎟⎜ ⎟−⎝ ⎠
. Determinar todos los valores de k para los
cuales es Nu {0}f ≠ y Nu Imf f⊆ . 28. Sean B = {(1,1,0);(0,1,1);(0,0,1)} y f y g: R3→ R3 dadas por
1 2 3 1 3 1 2 2 3( , , ) ( , , )g x x x x x x x x x= + + − y 1 0 1
( ) 1 1 00 1 0
BM f⎛ ⎞⎜ ⎟= −⎜ ⎟⎜ ⎟⎝ ⎠
. Hallar 1( ) (1,1,1)f g − .

76
29. Sea f : R3→ R3 la t. l. tal que 0 1 2
( ) 3 1 11 0 1
M f−⎛ ⎞
⎜ ⎟= ⎜ ⎟⎜ ⎟⎝ ⎠
.
Hallar, si es posible, , y , ,a b c∈ 3v w R reales tales que { }; ; ( , , )B a b c= v w sea una base
de R3 y 5 0
( ) 5 00 0
BE
aM f b
c
⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟⎝ ⎠
.
30. Sean B = {(0,1,–1);(1,0,0);(1,1,0)}, f : R3→ R3 dada por 1 0 1
( ) 0 1 11 1 1
BEM f−⎛ ⎞
⎜ ⎟= −⎜ ⎟⎜ ⎟−⎝ ⎠
y
{ }31 2 3/ 2 5 0x x x= ∈ − + =x RS . Decidir si (9,7,2)f f ∈S .
31. Sean B = {v1, v2, v3} y B’ = {2v1+v2, 2v1,v2+v3} bases de R3 , y f y g: R3 → R3 tales
que '
2 1 3( ) 1 1 0
3 1 2B BM f
⎛ ⎞⎜ ⎟= −⎜ ⎟⎜ ⎟⎝ ⎠
y '
2 0 1( ) 1 3 2
1 2 1BM g
⎛ ⎞⎜ ⎟= −⎜ ⎟⎜ ⎟−⎝ ⎠
. Calcular ' ( )BM f g .
32. Sean ( 1,1, 1);(2,1,1)= − −S y { }1 2 3/ 2 3 0x x x= ∈ − − + =3x RT .
Definir un isomorfismo f: R3→ R3 tal que ( )f =S T ; ( )f =T S y exista un vector
w≠0 tal que 1 1( )3
f − =w w .
33. Definir una transformación lineal f: R4 →R4 que verifique simultáneamente:
(1,–1,0,1)∈ Nu f y Nu ( )f f = Im ( )f f .

Práctica 6
77
PRÁCTICA 6 NÚMEROS COMPLEJOS Y POLINOMIOS
DEFINICIONES Y PROPIEDADES
NÚMEROS COMPLEJOS
El conjunto C de los números complejos es:
C = { z = a + bi / a, b ∈ R ; i2 = –1}
Si z ∈ C, la representación a + bi se llama forma binómica de z.
La parte real de z es a: Re z = a.
La parte imaginaria de z es b: Im z = b.
Si z, w ∈ C z = w ⇔ Re z = Re w e Im z = Im w
Sean z = a + bi y w = c + di dos números complejos;
la suma es z + w = (a + c) + (b + d)i
el producto es z w = (ac – bd) + (ad + bc)i
La suma es asociativa y conmutativa; el producto es asociativo y conmutativo y vale la
propiedad distributiva respecto de la suma.
Notación: a + (– b)i = a – bi a + 0i = a 0 + bi = bi
Si z ∈ C, z = a + bi, llamaremos conjugado de z a z a bi= −
y llamaremos módulo de z al número real no negativo 2 2z a b= +
Observaciones 1) 2 =z z z 2) Si z ≠ 0, 12
− =zzz
Propiedades:
C1) z z=
C2) z w z w+ = +
C3) =z w z w
C4) Si z ≠ 0, 1 1( )z z− −=
C5) 2 Re+ =z z z
C6) 2(Im )− =z z z i
M1) z = 0 ⇔ 0z =
M2) =z w z w
M3) z z=
M4) z z= −
M5) Si z ≠ 0 ⇒ 11z z −− =
M6) Si w ≠ 0 ⇒ zz
w w=

78
Si z ∈ C, z = a + bi, z ≠ 0, llamaremos argumento de z al único número real arg z tal
que 0 ≤ arg z < 2π ; cos arg =azz
; sen arg =bzz
Si z ∈ C, la forma trigonométrica de z es (cos arg sen arg )= +z z z i z
Si z = ρ (cos α + isen α) y w = τ (cos β + isen β), con ρ, τ > 0 , α, β ∈ R, entonces
z = w ⇔ ρ = τ (es decir z w= ) y α = β + 2kπ para algún k ∈ Z.
Teorema de De Moivre. Sean z, w ∈ C, z ≠ 0, w ≠ 0.
Si (cos sen )= +z z iα α y (cos sen )= +w w iβ β entonces
(cos( ) sen( ))= + + +z w z w iα β α β Corolario.
11 (cos( ) sen( ))
(cos( ) sen( ))
(cos( ) sen( ))
(cos( ) sen( ))
−− = − + −
= ⋅ − + −
= − + −
= + ∈nn
z z i
z z i
zz iw w
z z n i n n
α α
α α
α β α β
α α Z
Si w ∈ C, w ≠ 0, una raíz n-ésima de w es un número z ∈ C tal que zn = w.
Propiedad. Si z es una raíz n-ésima de w entonces: 1 arg 2 arg 2(cos sen )+ +
= +n w k w kz w in n
π π
para algún entero k tal que 0 ≤ k ≤ n − 1.
Si z ∈ C, (cos sen )= +z z iα α , la notación exponencial de z es iz z e α=
Propiedades. Si α, β ∈ R
( )
i i i
i i i
e e e
e e e
α α α
α β α β
−
+
= =
=

Práctica 6
79
POLINOMIOS
En lo que sigue K significa Q, R ó C.
Un polinomio con coeficientes en K es una expresión de la forma
P(x) = a0 x0 + a1 x1 + ... + an xn = 0
nj
jj
a x=
∑ con n ∈ N0 y aj ∈ K .
Indicamos K[X] = { P / P es polinomio con coeficientes en K }, y consideramos en
K[X] las operaciones de suma y producto usuales.
Grado de P: Si P ≠ 0, P(x) = a0 x0 + a1 x1 + ... + an xn y an ≠ 0 , definimos
grado de P = gr P = n
El polinomio nulo no tiene grado.
Valen las siguientes propiedades: si P ≠ 0, Q ≠ 0,
gr(P Q) = gr P + gr Q
gr(P + Q) ≤ max{ gr P, gr Q} (si P + Q ≠ 0)
Dados P ∈ K[X], P(x) = 0
nj
jj
a x=
∑ y z ∈ K, llamamos especialización de P en z al
número P(z) = 0
nj
jj
a z=
∑
Sea P ∈ K[X], z ∈ K. Diremos que z es raíz de P si P(z) = 0.
Algoritmo de división.
Dados P, Q ∈ K[X], Q ≠ 0, existen únicos S, R ∈ K[X] tales que: P = Q S + R con R = 0 ó gr R < gr Q
Se dice que Q divide a P (o que P es divisible por Q) y se nota Q | P, si el resto de la
división de P por Q es el polinomio nulo, esto es, si P = Q S con S ∈ K[X].
Teorema del Resto.
Si P ∈ K[X] y z ∈ K, el resto de la división de P por (x−z) es igual a P(z).
Corolario. Sea P ∈ K[X] y z ∈ K; z es raíz de P si y sólo si (x – z) | P.
Teorema.
Si P ∈ K[X] y a1, a2, ..., ar ∈ K son raíces de P con ai ≠ aj si i ≠ j, entonces
P(x) = (x – a1)(x – a2)...(x – ar) Q(x) con Q ∈ K[X].
Corolario. Si P es un polinomio de grado n entonces P tiene a lo sumo n raíces.

80
Teorema de Gauss.
Sea P ∈ Z[X], P(x) = 0=
∑n
jj
ja x con a0 ≠ 0. Si p
q (con p ∈ Z, q ∈ N y (p, q) = 1) es una
raíz de P, entonces p | a0 y q | an.
Teorema fundamental del álgebra.
Si P ∈ C[X] y gr P ≥ 1, existe z ∈ C tal que z es raíz de P.
Teorema.
Sea P ∈ R[X], y sea z ∈ C. Si z es raíz de P ⇒ z es raíz de P.
Si P(x) = 0=
∑n
jj
ja x ∈ K[X], llamaremos polinomio derivado de P a:
11
11 0
( ) ( 1)n n
j jj j
j jP x ja x j a x
−−
+= =
∂ = = +∑ ∑
Propiedades.
( )P Q P Q∂ + = ∂ + ∂ ( ) ( )P Q P Q P Q∂ ⋅ = ∂ ⋅ + ⋅ ∂ 0( ) 0kx∂ =
Notación: Designamos ( ) ( 1)( ) ( ( ( )))−∂ = ∂ ∂ = ∂ ∂ ∂…m mP P P
Si P ∈ K[X], diremos que z ∈ C es raíz de multiplicidad k de P (k ∈ N) si
P(x) = (x – z)k Q(x) con Q ∈ C[X] y Q(z) ≠ 0.
Teorema.
Sea P ∈ R[X], y sea z ∈ C; z es raíz de multiplicidad k de P si y sólo si 2 ( 1)( ) ( ) ( ) ( ) 0kP z P z P z P z−= ∂ = ∂ = = ∂ = y ( ) ( ) 0k P z∂ ≠ .
Polinomio interpolador de Lagrange
Sean a0, a1, ..., an , ai ∈ K , ai ≠ aj si i ≠ j, y sean b0, b1, ..., bn arbitrarios, bi ∈ K
. Existe un único polinomio L ∈ K[X], con L = 0 ó gr L ≤ n , que satisface L(ai) = bi
para i = 0, 1, ..., n. Se trata del polinomio:
0( ) ( )
n
i ii
L x b L x=
= ∑ donde 0
0
( )
( )( )
n
kkk i
i n
i kkk i
x a
L xa a
=≠
=≠
−
=−
∏
∏

Práctica 6
81
EJERCICIOS
NÚMEROS COMPLEJOS
Ejercicio 1.- Dar la forma binómica de z.
a) 1(3 ) ( 5 )5
z i i= − + + b) ( 2 )( 3 )z i i= + − c) 1 1(3 )(3 ) (3 2 )3 3
z i i i= + − + +
Ejercicio 2.- Dar la forma binómica de z. a) 1(1 2 )(1 2 )z i i −= + − b) (1 )(2 3 )(3 2 )z i i i= + + +
c) 1(1 ) ( 2 2 ) ( 2 5 )z i i i−= + + + − +
Ejercicio 3.- Calcular z .
a) ( 2 ) (3 2 3 )z i i= + + − b) 1(1 )(1 )z ai ai a−= + − ∈R
c) 1(3 )z i −= d) 1z i i i= − + +
e) (1 )(1 2 )(3 )z i i i= + − − f) 103(1 3 )z i= +
Ejercicio 4.- Dar la forma binómica de z .
a) 1z i i= − + b) 1z i i i= + + +
c) (1 2 )(2 )z i i= − − d) (1 3 )(1 3 )z i i= + − Ejercicio 5.- Representar en el plano todos los z ∈C tales que: a) 3z = b) 2z ≤ c) z z= Ejercicio 6.-
a) Representar en el plano el conjunto B { / 1 2}z z i= ∈ + − ≤C .
b) Representar en el plano el conjunto B { / 1 3 }z z z i= ∈ + ≤ − −C .
c) Si 1A { / Re 1, Im }2
z z z= ∈ ≤ ≤C y B { / 1 3 5}z z i= ∈ − − =C , representar
C A B= ∩ .
Ejercicio 7.- Escribir en forma binómica todos los z ∈C tales que:
a) 2 1 4 3z i= − b) 2 16 14 3z i= +
c) 2 2 3 0z z+ + = d) 2 5 2z i z= −
Ejercicio 8.- Hallar todos los z ∈C tales que su conjugado coincide con su cuadrado.

82
Ejercicio 9.- Calcular Re z e Im z .
a) 2(cos sen )z iπ π= + b) 3 33(cos sen )2 2
z iπ π= +
c) 2 2(cos sen )3 3
z iπ π= + d) 7 72(cos sen )4 4
z iπ π= +
Ejercicio 10.- Escribir z en forma trigonométrica.
a) 5z = b) 6z = − c) 15z i= d) 13
z i= −
e) 5 5z i= + f) 3 3z i= −
g) 3(cos 0 sen 0)z i= − + h) 3(cos sen )2 2
z iπ π= −
i) 2(cos cos )3 3
z iπ π= + j) (cos sen )
2 2 2z i iπ π π
= +
Ejercicio 11.- Representar en el plano.
a) A { / arg 0}z z= ∈ =C b) 1 5B { / arg }2 4
z zπ π= ∈ ≤ ≤C
c) 2C { / | | 5, 0 arg }3
z z z π= ∈ = ≤ ≤C d) C { / | 1 | 3, arg }6 3
z z i zπ π= ∈ + − ≤ ≤ ≤C
Ejercicio 12.-
a) Escribir en forma trigonométrica 3 1(1 )( )2 2
z i i= + −
b) Escribir en forma binómica 15( 3 3 3 )z i= − +
c) Escribir en forma binómica 5
1( 3 )
izi
+=
− +
Ejercicio 13.- Encontrar todas las raíces n-ésimas de w para: a) n = 3 1w = b) n = 5 3w = − c) n = 4 1 3w i= − −
Ejercicio 14.- Determinar todos los z ∈C tales que 8 13
izi
−=
+
Ejercicio 15.- Encontrar todos los z ∈C que satisfacen:
a) 3 2z i z= b) 10 104z z= − c) 5 0z z− =
d) 4 4 0z z−+ = e) 3 29 0z i z z+ = f) 4 83 3( )2 2
z i= −

Práctica 6
83
Ejercicio 16.-
a) Escribir en forma binómica ie π , 3i
eπ
, 2 ie π− , 56
ie
π.
b) Expresar en forma exponencial las raíces quintas de –1.
c) Probar que t∀ ∈R es cos2
it ite et−+
= y sen2
it ite eti
−−=
POLINOMIOS
Ejercicio 17.- Calcular PQ , 3P + Q y P2 – Q e indicar el grado de cada uno.
a) P(x) = 2x + 1 Q(x) = x2 + 3x – 2
b) P(x) = 3x2 + x – 1 Q(x) = –9x2 – 3x + 6
c) P(x) = x3 – 3 Q(x) = –x3 + 2x2 + 1
Ejercicio 18.- Encontrar, si existen, a, b y c en R tales que:
a) 3x – 2 = a(x2 + x + 3) + b(x2 – 2x + 1) + c(x2 – 3)
b) (2x – 1)(x + 1) = ax2 + b(x + 1)(x + 3) Ejercicio 19.- a) Determinar a ∈ R tal que:
i) Si P(x) = ax3 – 3ax2 + 2, sea P(2) = 3
ii) Si P(x) = x3 + 3x2 + a, P tenga a cero como raíz
iii) Si P(x) = ax2 + ax + 3, sea P(–1) = 3 y gr P = 2
b) Determinar a, b y c en R para que:
i) P(x) = ax2 + bx + c tenga a 1 y –1 por raíces
ii) P(x) = x2 + 2bx + a y Q(x) = ax3 – b tengan a 2 como raíz común.
Ejercicio 20.- Determinar todas las raíces de P.
a) P(x) = x2 + ix + 1 b) P(x) = x2 + (1 – i)x + 1
c) P(x) = x2 + 2x + 1 d) P(x) = ix5 – 1
Ejercicio 21.- Hallar todas las raíces de P.
a) P(x) = 3x3 + x2 + 12x + 4
b) P(x) = 13
x3 + 2x2 + 23
x – 7
c) P(x) = x4 + 2x3 – 9x2 – 18x
d) P(x) = x4 – x3 – 9x2 – x – 10 sabiendo que i es raíz

84
e) P(x) = x5 – 25x3 + 85x2 – 106x + 45 sabiendo que (2 + i) es raíz
f) P(x) = x4 – 94
x2 – 94
g) P(x) = x6 – 2x4 – 51x2 – 108 sabiendo que P( 3− i) = 0 Ejercicio 22.- Dado P(x) = 2x4 – 6x3 + 7x2 + ax + a, determinar a ∈ R sabiendo que
(1 + i) es raíz de P y hallar las restantes raíces de P. Ejercicio 23.- Escribir x4 + 1 como producto de polinomios irreducibles en C[X] y en
R[X].
Ejercicio 24.- Determinar la multiplicidad de α como raíz de P.
a) P(x) = (x2 – 1)(x – 1)3(x5 – 1) α = 1
b) P(x) = x4 + 3x3 + 12x2 α = 0
c) P(x) = x3 – x2 – 5x + 6 α = 2
d) P(x) = (x4 + 1)(x2 + 1)(x3 + i) α = i
Ejercicio 25.- Hallar todas las raíces del polinomio P y escribirlo como producto de
polinomios de grado 1.
a) P(x) = x5 – 6x4 + 10x3 + 4x2 – 24x + 16, y se sabe que P tiene una raíz triple.
b) P(x) = 4x3 + 8 3 x2 + 15x + 3 3 , y se sabe que P tiene una raíz doble. Ejercicio 26.-
a) Hallar P ∈ R[X], de grado mínimo, que tenga a 1/2 como raíz simple, a (1 + i) como
raíz doble y que verifique que P(0) = –2.
b) Hallar todos los polinomios P con coeficientes reales, de grado 3, que tengan a (–2)
como raíz doble y que verifiquen P(1) = P(–1).
Ejercicio 27.- Sabiendo que Q(x) = 81x4 – 1 y P(x) = 9x4 + 27x3 – 8x2 + 3x – 1 tienen
alguna raíz común, encontrar todas las raíces de P.
Ejercicio 28.- Sea P(x) = 2x3 – 5x2 + 4x + 1, y sean a, b y c sus raíces.
Calcular: a+b+c abc a2+b2+c2 1 1 1a b c
+ +
Ejercicio 29.- Calcular la suma y el producto de las raíces séptimas de la unidad.

Práctica 6
85
Ejercicio 30.-
a) Sea P(x) = 3x3 – 2x2 + x + α.
Encontrar α ∈ R para que la suma de dos de las raíces de P sea igual a –1.
b) Sea P(x) = x3 + 2x2 – 7x + α. Encontrar α ∈ R de manera que una de las raíces de P sea igual a la opuesta de otra.
c) P(x) = 3x3 + x2 – 2x + α. Encontrar α ∈ R tal que una de las raíces de P sea igual a la suma de las otras dos.
Ejercicio 31.-
a) Encontrar un polinomio P, de grado a lo sumo 3, que satisfaga:
P(1) = 1 ; P(0) = –1 ; P(2) = 2 ; P(–1) = 0
b) Encontrar la ecuación de una parábola que pase por P1, P2 y P3, donde
P1 = (–1,1) ; P2 = (0,1) ; P3 = (2,–2)
c) Encontrar un polinomio de grado 4 que satisfaga:
P(–1) = –1 ; P(0) = 1 ; P(1) = 4
EJERCICIOS SURTIDOS
1. Hallar todos los z ∈ C tales que: a) 3 3z izz= b) 3(1 3 ) 2i z z+ =
2. Sea z ∈ C , z ≠ 1, tal que⏐z⏐=1. Calcular 1Im( )1
+−
ziz
.
3. Hallar un polinomio P ∈ R[X], de grado mínimo, que verifique:
P(1+i) = 0 ; −1 es raíz doble de P ; Im(P(i)) = 28
4. Sea P(x) = (x3 – ax2 − a2x + 1)(x2 − a2). Hallar a para que –1 sea raíz doble de P.
5. Sean P(x) = x4 + x3 – 7x2 − 8x − 8 y Q(x) = x3 − 1. Se sabe que P y Q tienen al menos una raíz común. Hallar todas las raíces de P en C.
6. Hallar un polinomio [ ]P X∈R , de grado mínimo, que verifique simultáneamente:
las soluciones de 2 5z z= son raíces de P; P tiene alguna raíz doble; P(1) = 31. 7. Encontrar todas las raíces de P(x) = x5 + x4 + x3 + 2x2 – 12x – 8 , sabiendo que tiene
alguna raíz imaginaria pura.
86
8. a) Hallar todas las raíces sextas de (1 + i)
b) ¿Existe una raíz sexta de (1 + i) cuyo conjugado sea también raíz sexta de (1 + i)?
c) Hallar el producto de todas las raíces sextas de 1 + i.
9. a) Hallar el resto de la división de P por (x – 3)(x + 2), si P(3) = 1 y P(–2) = 3
b) Calcular el resto de la división de P(x) = xn – 2xn–1 + 2 por x2 + x.
c) Los restos de dividir a P(x) por (x + 2) , (x – 3) y (x + 1) son 3, 7 y 13
respectivamente. Calcular el resto de la división de P(x) por (x + 2)(x – 3)(x + 1)
d) Calcular el resto de la división de P(x) = (cos a + x sen a)n por x2 + 1. 10. Sea P ∈ R[X] y Q(x) = x3 – 2x2 + x. Hallar el resto de la división de P por Q
sabiendo que P(0) = –1; P(1) = 3; ∂P(1) = –3. 11. Encontrar todos los z ∈ C tales que 7 3 102z z i= − . 12. Hallar z1 y z2 tales que ambos sean soluciones de 2(1 ) (2 2 )i z i z− = + y que además
verifiquen 1Re( ) 0z < ; 1 2Im( ) 0z z⋅ > .
13. Encontrar un polinomio [ ]P X∈R de grado mínimo que tenga por raíces a las
soluciones de la ecuación 2(2 Im Re ) 5 12z i z i− = − + . 14. Hallar un polinomio [ ]P X∈R de grado 4, que cumpla las siguientes condiciones:
i) el coeficiente principal de P es igual a 6 ii) −1−i es raíz de P
iii) el cociente entre dos de sus raíces reales es igual a 4 iv) P(0)=192 15. Graficar los ∈z C tales que 4 4( )=z z y Re( ) 1z < . 16. Hallar todos los z ∈C tales que 6 4( )−=z i z e 3Im( ) 0<z . 17. Hallar un polinomio [ ]∈P XR , de grado mínimo, que tenga por raíces a todas las
soluciones de la ecuación 44 2=z z i z . 18. Hallar todas las raíces de 4 3 2( ) 4 3 8 10= − + + −P x x x x x sabiendo que la suma de sus raíces reales es igual a cero. 19. Se sabe que el polinomio 4 3 2( ) 2 2 8 8= − + − −P x x x x x tiene alguna raíz imaginaria
pura. Hallar todas las raíces de P y escribir P como producto de polinomios de grado 1.

Práctica 7
87
PRÁCTICA 7 AUTOVECTORES Y AUTOVALORES
DEFINICIONES Y PROPIEDADES
Sea A ∈ Rn×n. Un vector v ∈ Rn, v ≠ 0, es un autovector de A (o vector propio), si
existe λ ∈ R tal que Av = λv.
Diremos que el número λ es un autovalor de A (o valor propio) y que el vector v es un
autovector de A asociado al autovalor λ. Sea f : V → V una transformación lineal. Un vector v ∈ V, v ≠ 0, es un autovector de f
asociado al autovalor λ, si f (v) = λv.
El conjunto Sλ = { v ∈ V / f (v) = λv } es el subespacio asociado al autovalor λ.
Sea f : Rn → Rn una transformación lineal. Si v es un autovector de f asociado al
autovalor λ y A = ( )M f , entonces v es un autovector de A asociado al mismo
autovalor λ, pues Av = f (v) = λv
Propiedad: λ es autovalor de A si y sólo si la matriz A – λI no es inversible, o sea, si y
sólo si det(A – λI) = 0.
El polinomio P(λ) = det(A – λI) se llama polinomio característico de A. Su grado es n y
los autovalores de A son raíces de P.
Propiedad: Si λi ≠ λj ∀ i ≠ j y v1, ..., vr son autovectores de A asociados a los auto-
valores λ1, ..., λr, respectivamente, entonces { v1, ..., vr } es linealmente independiente.
La transformación lineal f : V → V se dice diagonalizable si existe una base B de V tal
que ( )BM f es diagonal.
Propiedad: Si f : V → V es una transformación lineal y B es una base de V formada
por autovectores de f, entonces ( )BM f es diagonal.
Propiedad: Si dim V = n y f tiene n autovalores distintos, entonces f es diagonalizable.
Propiedad: Si B y B′ son dos bases de V, y f : V → V es una transformación lineal,
entonces las matrices ( )BM f y ´( )BM f tienen los mismos autovalores.

88
Una matriz A ∈ Rn×n se dice diagonalizable si existe una matriz diagonal D ∈ Rn×n y
una matriz inversible C ∈ Rn×n tales que A = C D C–1
Propiedad: Una matriz A ∈ Rn×n es diagonalizable si y sólo si tiene n autovectores
linealmente independientes, v1, ..., vn.
En este caso C es la matriz cuyas columnas son v1, ..., vn, y
1
2
λ 0λ
0 λn
D
⎛ ⎞⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟= ⎜ ⎟⎜ ⎟⎟⎜ ⎟⎜ ⎟⎜ ⎟⎟⎜⎜⎝ ⎠⎟
,
donde λi es el autovalor asociado a vi.
EJERCICIOS Ejercicio 1.- Para cada matriz calcular todos los autovalores y para cada uno de ellos
hallar el subespacio asociado.
a) 7 510 8
⎛ ⎞− ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜−⎝ ⎠ b)
4 23 3⎛ ⎞⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜⎝ ⎠
c) 2 14 2
⎛ ⎞− ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜−⎝ ⎠ d)
4 10 4⎛ ⎞⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜⎝ ⎠
e) 2 3 11 1 41 2 1
⎛ ⎞− ⎟⎜ ⎟⎜ ⎟⎜ ⎟−⎜ ⎟⎜ ⎟⎜ ⎟⎟⎜⎜ ⎟−⎝ ⎠ f)
3 51 1⎛ ⎞− ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ −⎝ ⎠
g) 1 2 10 5 40 8 7
⎛ ⎞− ⎟⎜ ⎟⎜ ⎟⎜ ⎟− −⎜ ⎟⎜ ⎟⎜ ⎟⎟⎜⎜ ⎟⎝ ⎠
Ejercicio 2.-
a) Hallar todos los k ∈ R para los cuales A = 0 0 31 0 1
1 1k
⎛ ⎞− ⎟⎜ ⎟⎜ ⎟⎜ ⎟−⎜ ⎟⎜ ⎟⎜ ⎟⎟⎜⎜ ⎟−⎝ ⎠ tiene a 1 como autovalor.
b) Para los valores de k hallados, calcular todos los autovalores de A.
Ejercicio 3.- Encontrar una base B de R3 para la cual ( )BM f sea diagonal.
a) f : R3 → R3 tal que ( )M f = 3 1 10 5 00 7 2
⎛ ⎞− ⎟⎜ ⎟⎜ ⎟⎜ ⎟−⎜ ⎟⎜ ⎟⎜ ⎟⎟⎜⎝ ⎠.
b) f : R3 → R3 tal que ( )M f = 2 2 40 4 06 2 8
⎛ ⎞− − ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎟⎜⎜ ⎟− −⎝ ⎠.

Práctica 7
89
Ejercicio 4.- Sean B = { (1, 1, 1); (0, 1, 1); (0, 0, 1) } y f : R3 → R3 la t. l. definida por
( )BM f = 5 0 03 1 11 0 3
⎛ ⎞⎟⎜ ⎟⎜ ⎟⎜ ⎟−⎜ ⎟⎜ ⎟⎜ ⎟⎟⎜⎜ ⎟−⎝ ⎠. Encontrar una base B′ de R3 tal que ´( )BM f sea diagonal.
Ejercicio 5.- Sea B = {(1, –1, 0); (0, 0, 1); (–3, 2, 0)} y f : R3 → R3 la t.l. tal que
( )BEM f = 3 2 94 4 92 0 6
⎛ ⎞− ⎟⎜ ⎟⎜ ⎟⎜ ⎟−⎜ ⎟⎜ ⎟⎜ ⎟⎟⎜⎜ ⎟−⎝ ⎠. Decidir si f es diagonalizable.
En caso afirmativo, encontrar una base B′ tal que ´( )BM f sea diagonal.
Ejercicio 6.- Determinar si la matriz A es diagonalizable; en caso afirmativo encontrar
matrices C y D tales que D es diagonal y A = C D C–1.
a) A = 3 53 1⎛ ⎞⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜⎝ ⎠
b) A = 1 1 43 2 12 1 1
⎛ ⎞− ⎟⎜ ⎟⎜ ⎟⎜ ⎟−⎜ ⎟⎜ ⎟⎜ ⎟⎟⎜⎜ ⎟−⎝ ⎠ c) A =
1 2 43 4 65 5 9
⎛ ⎞− ⎟⎜ ⎟⎜ ⎟⎜ ⎟−⎜ ⎟⎜ ⎟⎜ ⎟⎟⎜⎜ ⎟−⎝ ⎠
d) A = 1 1 11 1 11 1 3
⎛ ⎞− ⎟⎜ ⎟⎜ ⎟⎜ ⎟−⎜ ⎟⎜ ⎟⎜ ⎟⎟⎜⎜ ⎟− −⎝ ⎠ e) A =
4 6 61 3 21 5 2
⎛ ⎞⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎟⎜⎜ ⎟− − −⎝ ⎠
Ejercicio 7.- Dada A = 0 2 22 3 42 4 3
⎛ ⎞⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎟⎜⎜ ⎟⎝ ⎠, calcular A10.
Ejercicio 8.- Sea f: R3 → R3 tal que ( )M f = 0 0 31 0 12 1 1
⎛ ⎞− ⎟⎜ ⎟⎜ ⎟⎜ ⎟−⎜ ⎟⎜ ⎟⎜ ⎟⎟⎜⎜ ⎟− −⎝ ⎠ y 2( 3, 4,1)a a= + −S .
Hallar todos los valores de a ∈R para los cuales f(S) = S.
Ejercicio 9.- Sea f : R3 → R3 la transformación lineal dada por f (x1, x2, x3) = (4x1 + 4x2 + 4x3, 5x1 + 7x2 + 10x3, –6x1 – 7x2 – 10x3).
Encontrar una base de B de R3 tal que ( )BM f = 2 1 00 2 00 0 3
⎛ ⎞⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎟⎜⎜ ⎟−⎝ ⎠.

90
EJERCICIOS SURTIDOS
1. Se sabe que la matriz A = 0 0 21 0 1
3 1k
⎛ ⎞⎟⎜ ⎟⎜ ⎟⎜ ⎟− −⎜ ⎟⎜ ⎟⎜ ⎟⎟⎜⎜ ⎟−⎝ ⎠ tiene un autovalor igual a –2.
Decidir si A es diagonalizable.
2. Sea f : R3 → R3 la transformación lineal tal que ( )M f = 2 0 03 5 63 3 4
⎛ ⎞⎟⎜ ⎟⎜ ⎟⎜ ⎟−⎜ ⎟⎜ ⎟⎜ ⎟⎟⎜⎜ ⎟−⎝ ⎠.
Hallar una base B de R3, B = {(–1, 1, 0), v2, v3} tal que ( )BM f sea diagonal.
3. Sea {v1, v2, v3} una base del espacio vectorial V y f : V → V la t.l. definida por:
f (v1) = –v1 – 2v2; f (v2) = v1 + 2v2; f (v3) = 2v3. Hallar una base de autovectores de f.
4. Sea B = {v1, v2, v3} base de R3 y f : R3 → R3 la t.l. tal que ( )BM f = 3 0 00 2 01 0 2
⎛ ⎞⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎟⎜⎜ ⎟−⎝ ⎠.
Hallar los autovalores y autovectores de f. ¿Es f diagonalizable?
5.- Sea f : R3 → R3 , f (x1, x2, x3) = (–2x1 + 2x3, –7x1 – 3x2 + x3, αx1 + 4x3).
Determinar α para que f no sea isomorfismo y decidir si existe una base B de R3 tal
que ( )BM f sea diagonal. 6. Sea f : R3 → R3 la t.l. f (x1, x2, x3) = (2x1 + x2 – x3, 3x2 + 2x3, –x3).
Hallar una base B de R3 tal que 1( )BM f − sea diagonal.
7. Sean S = {x ∈ R4 / 3x1 + x2 – x3 + 4x4 = 0} y T = <(1,1,0,–1), (–1,0,1,0)>.
Hallar una t.l. f : R4 → R4 tal que sus autovalores sean 3, –2 y 0; Im f = T y Nu f ⊂ S.
8. Sean B = {(0,1,1), (1/2,–1/2,0), (0,0,–1)} una base de R3 y f : R3 → R3 la t.l. tal que
( )EBM f = 3 2 24 0 25 2 1
⎛ ⎞⎟⎜ ⎟⎜ ⎟⎜ ⎟−⎜ ⎟⎜ ⎟⎜ ⎟⎟⎜⎜ ⎟⎝ ⎠. Hallar una base B′ tal que ´( )BM f sea diagonal.

Práctica 7
91
9. Sean B = {(0,0,1), (1,0,0), (0,1,0)}; B′ = {(0,0,–1), (–1,–1,–1), (3,2,1)} y
f : R3 → R3 la t.l. tal que ´( )BBM f = 1 0 00 2 00 1 2
⎛ ⎞⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎟⎜⎜ ⎟⎝ ⎠. Hallar los autovalores de f f.
10. Sea B = {(1,0,–1), (0,2,1), (–1,3,2)} y f : R3 → R3 la t.l. tal que
( )BM f = 0 20 21 0 1
ab
⎛ ⎞⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎟⎜⎜ ⎟⎝ ⎠. Encontrar a y b para que f (–1, –1, 0) = (–1, –1, 0).
Para los valores hallados, decidir si f es diagonalizable.
11. Sea 2 20 21 2 2
aA b
a b
⎛ ⎞⎜ ⎟= −⎜ ⎟⎜ ⎟+⎝ ⎠
.
Determinar a y b para que (1,−1,0) sea autovector de A.
12. Dada la matriz 3 0 08 5 48 8
Ak
−⎛ ⎞⎜ ⎟= − −⎜ ⎟⎜ ⎟−⎝ ⎠
, hallar k ∈R sabiendo que 1 es autovalor de A.
Para ese valor de k, determinar si A es diagonalizable. 13. Sean B={v1; v2; v3 } y B’={v1; v1 − v3; v2 + v3 } bases de R3 y sea f: R3→ R3
tal que '
0 4 4( ) 1 4 3
0 1 0BBM f
⎛ ⎞⎜ ⎟= − −⎜ ⎟⎜ ⎟−⎝ ⎠
. Decidir si f es diagonalizable.
14. Sean B’= {v1, v2, v3} y B’’= {v2+v3; v2–v1; v2} bases de V . Sea f: V →V la t. l. tal
que ´´ ´ ( )B BM f = 3 1 00 1 32 0 0
−⎛ ⎞⎜ ⎟− −⎜ ⎟⎜ ⎟⎝ ⎠
y sea g: V →V definida por g(v) = f(v) – 2v.
Hallar una base B de V tal que ( )BM g sea diagonal.
15. Sea 3 3: →f R R una t. l. que verifica: f(1,1,0) = (2,−10, k) ; f(0,−1,0) = (0, 3, 0) y
f(0,1,1) = (2,−2, 4).
Hallar, si es posible, los ∈k R para los cuales f no es monomorfismo.
Para los valores de k encontrados, decidir si f es diagonalizable.

92
16. Sean { }(1, 2,2); (0, 1,0); (0,1, 1)= − − −B y f: R3→ R3 la t. l. tal que
2
2 0 0( ) 0 1
5 0 2
⎛ ⎞⎜ ⎟= − −⎜ ⎟⎜ ⎟− −⎝ ⎠
EBM f kk
.
Hallar todos los valores de k para los cuales 1 es autovalor de f y f es diagonalizable. 17. Sean { }1 2 3; ;B = v v v y { }1 1 2 1 2 3' ; ; 2= + − − −B v v v v v v bases de un e.v. V y
f : →V V la transformación lineal tal que ´
5 2 2( ) 0 1
0 1 4
−⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟− −⎝ ⎠
BBM f a .
Hallar, si es posible, una base de autovectores de f, sabiendo que 2 32 −v v es un autovector de f .

ALGEBRA(27) Primer Parcial A En cada ejercicio escriba todos los razonamientos que justifican la respuesta.
1. Sean : (1, 1,2) (2,1,1)− +L λ y (3,1,0)P = . Hallar todos los planos Π que son paralelos al plano que contiene a L y a P y tales que d( , ) 2 11P Π = .
2. Sea 0 16 3 4
0 0
kA k
k
−⎛ ⎞⎜ ⎟= − +⎜ ⎟⎜ ⎟⎝ ⎠
. Hallar todos los valores de k∈R para los cuales los
sistemas 0A =x y A = −x x tengan infinitas soluciones. Para los valores obtenidos
resolver el sistema A = −x x .
3. Sea { }31 2 3/ 3 0x x x= ∈ − + =x RS . Hallar una base { }1 2 3; ;B = v v v de 3R tal que
1 ∈v S ; 2 ∈v S ; 3⊥∈v S ; el vector (3,6,1) tiene coordenadas (2,3,0) en la base B y el
vector ( 5, 2, 5)− − tiene coordenadas (0,1, 1)− en la base B.
4. Sean { }41 3 4/ 2 0x x x= ∈ + + =x RH , { }4
1 2 3 4 1 2/ 0x x x x x x= ∈ − + + = + =x RS y
(3, 2,1, 1);(1,1,1,0)= −T .
Encontrar, si es posible, un subespacio W tal que { }0∩ ≠W T y ⊕ =W S H .
ALGEBRA(27) Primer Parcial B En cada ejercicio escriba todos los razonamientos que justifican la respuesta.
1. Sean 1 1 3: 1x xΠ + = y 2 1 2 3: 2 3x x xΠ + + = . Hallar dos rectas 1 2y L L que verifiquen simultáneamente:
1 1⊂ΠL ; 2 2⊂ΠL ; 1 2∩ ≠∅L L ; 1 2⊥L L .
2. Determinar para qué valores de a y b, 201
X⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟−⎝ ⎠
es una de las infinitas soluciones de
la ecuación 1 0 1 2 1 13 1 1 1 2 1 21 0 1 1 3 4
bX X
a
− −⎛ ⎞ ⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎜ ⎟ ⎜ ⎟= − +⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟ ⎜ ⎟− −⎝ ⎠ ⎝ ⎠ ⎝ ⎠
.
Para los valores hallados, encontrar todas las soluciones de la ecuación.
3. Se sabe que { }1 2 3; ;B = v v v y { }1 2 1 2´ 3 ;2 ;B = − +v v v v w son bases de un espacio
vectorial V .
Determinar w sabiendo que el vector 1 24+ +v v w tiene las mismas coordenadas en
ambas bases.
4. Sean (1, 2, 1, 2);(3, 2,1, 6)= − − −S y { }44/ 0x= ∈ =xH R .
Hallar, si es posible, un subespacio T que verifique simultáneamente:
⊂T H ; dim 2=T ; 4⊥ + ≠S T R ; 4+ ≠S T R .

ALGEBRA(27) Segundo Parcial A En cada ejercicio escriba todos los razonamientos que justifican la respuesta.
1. Sean (1, 1,2,0);(3, 1,3,1)= − −S , { }41 4 2 4/ 0x x x x= ∈ − = − =xT R y (1, 1, 2,3)= −W .
Definir una transformación lineal 4 4:g →R R tal que Nu g =W ; ( )g ⊂ TS y ( )g ⊂T S .
2. Sea { }(1,1,0);(2,1,0);(0,0,1)=B una base de 3R y 3 3: →f R R la transformación
lineal tal que 1 1 2
( ) 1 0 11 0
EB
kM f k
k k
− +⎛ ⎞⎜ ⎟= − −⎜ ⎟⎜ ⎟+⎝ ⎠
.
Hallar todos los valores de ∈k R tales que dim(Im ) 2=f y (4,3, 1) Im − ∈ f .
3. Sea 4 3 2 2( ) 2 ( 1) 6 (5 6)P x x x x x= − + + + − +α α α . Hallar todos los valores de ∈α R
para los cuales 1 es raíz múltiple de P. Para los valores de α hallados, escribir a P
como producto de polinomios de grado 1.
4. Sean { }(1,1,1);(1,1,0); (0,1, 1)B = − y { }´ (0,1,1);(0,0,1);( 1,0,0)B = − bases de 3R . Sean las t. l.
3 3:f →R R tal que 2 0 0
( ) 0 0 00 0 3
BM f⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟−⎝ ⎠
y 3 3:g →R R tal que ´
8 8 3( ) 10 10 0
3 3 3EBM g
−⎛ ⎞⎜ ⎟= −⎜ ⎟⎜ ⎟− −⎝ ⎠
.
Se sabe que f y g tienen los mismos autovectores. Hallar los autovalores de g y los de f g .
ALGEBRA(27) Segundo Parcial B En cada ejercicio escriba todos los razonamientos que justifican la respuesta.
1. Sean (1, 1, 2,1);(1,0,1,0)= −T y { }41 2 3 4/ 2 0x x x x= ∈ + + + =x RW .
Definir, si es posible, una transformación lineal 4 4: →f R R que verifique
simultáneamente: ( )f ⊂T T ; Im f =W .
2. Sean { }1 2 3; ;B = v v v y { }1 2 2 3 2´ ; ;B = − +v v v v v bases de un espacio vectorial V . Sean :f →V V y :g →V V las transformaciones lineales tales que
2 0 1( ) 1 1 1
0 1 1BM f
⎛ ⎞⎜ ⎟= −⎜ ⎟⎜ ⎟−⎝ ⎠
y ´
0 1 1( ) 1 1 0
1 1 1B BM g
⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟−⎝ ⎠
. Calcular 1 2 3(2 )g f − +v v v .
3. El polinomio [ ]( )∈P x XR , 4 3 2( ) 25 36P x x ax x x b= − + − + tiene al menos una raíz
real, y todas sus raíces tienen parte real igual a 2.
Hallar todas las raíces de ( )P x .
4. Sea 3 3:f →R R una transformación lineal tal 1 2 0
( ) 0 1 20 1
M f−⎛ ⎞
⎜ ⎟= − −⎜ ⎟⎜ ⎟⎝ ⎠α
.
Hallar ∈α R para que (1,−1,2) sea autovector de f y decidir si f es diagonalizable.

ALGEBRA(27) EXAMEN FINAL
Para aprobar el examen es necesario tener por lo menos 8 respuestas correctas, y más respuestas correctas que incorrectas. En cada ejercicio marque la única respuesta correcta.
. 1. Sean 1 2 3Π : 4x x x+ + = y : λ(1,0,1) (0, 1, 1)+ − −L . Si ΠP = ∩L , entonces ( , )d P O es igual a
3 14 2 14 . 2. Sea 2( , 1,0, 1);(0, , 2,0)k k= − − −S . El conjunto de los k ∈R tales que (1, 2, , 2)k ⊥⊂S es
{ }2− { }2 { }2;2− { }2;2− −R . 3. Sean (1, 1,0); (0,2, 2)= −S y ( 1,1, 2)A = − . Una ecuación de la recta perpendicular a S que pasa por A es
λ(1,1, 1) (0, 2,1)X = − + λ( 1,1,2) (1,1, 1)X = − + − λ(1,1,0) ( 1,1, 2)X = + − λ(1,1, 1)X = −
.
4. Sean { }2 2 /A AB BA×= ∈ =RS y 1 10 0
B−⎛ ⎞
= ⎜ ⎟⎝ ⎠
. La dimensión de S es
0 1 2 3 . 5. Sean { }1 2 3; ;B = v v v y { }1 2 1 2 3´ ; ;B = + −v v v v v bases de un e.v. V . Las coordenadas de
1 2 33= − −v v v v en la base ´B son
( 2,5,1)− (2, 2,1) (3, 1, 1)− − (1, 2,3)− . 6. Si 4 2 4( ) ( 2 1)(2 2)P x x x x= + + + entonces −i es una raíz de P de multiplicidad
1 3 4 2
.
7. Sea 3 3:f →R R la t.l. 1 2 3 1 3 1 2 1 2 3( , , ) ( ,3 , 2 )k kf x x x x x x x x x x= + + − + . El conjunto de los k∈R para los cuales f es isomorfismo es
∅ { }2− { }2;3− { }2;3− −R . 8. Sean 3 3,A B ×∈R . Si det(3 ) 3A = y det( ) 3AB = , entonces 1det( )B− es igual a
13
3 127
27 .
9. Sean 1 0 20 1 11 1 3
A−
−
−
⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟⎝ ⎠
, 123
−
⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟⎝ ⎠
v y 112
⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟⎝ ⎠
b . El conjunto de soluciones del sistema ( )A − =x v b es
{ }λ(2,1,1) (1,1,0)+ { }λ(2,1,1) (2, 1,3)+ − { }λ(1, 2,3) (1,1,0)− + ∅ . 10. Sean { }1 2;B = v v una base de un e.v. V y :f →V V la t.l. tal que 1 1( ) 3f =v v y 2( ) 0f =v . Sea :g →V V la t.l. tal que ( ) ( ) 2g f= +v v v para todo ∈v V . Los autovalores de g son
5 y 2 3 y 2 5 y 0 3 y 0 .

11. Si 3 1z i= − entonces el argumento de −5z puede ser
7 π4
5 π4
3 π4
1 π4
. 12. La suma de las raíces del polinomio 4 3 2( ) (2 6 8 6)( 1)( 2)P x x x x x x x= − + + − + − es igual a
−3 7 4 −7 .
13. Sean { }(1,1,1);(1,0,1);(0,0,1)B = y 3 3:f →R R la t.l. tal que 2 1 1
1 1 0
2 0 2
( )BEM f−
− −
−
⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟⎝ ⎠
.
El Nu f es igual a ( 1,1, 1)− − (0,1,1) ( 2,0, 2)− { }0
.
14. Si 1 2 1
0 1 1
1 0 1
( )M f−
−
⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟⎝ ⎠
entonces Nu Imf f∩ es igual a
( 1,1,1)− (1,0,1) ( 1,1,1); (1,0,1)− { }0 . 15. Sea λ un autovalor de la matriz A. Dadas I: ( λ )A I− =x b tiene solución única; II: λA =x x tiene infinitas soluciones;
I es verdadera y II es verdadera I es verdadera y II es falsa I es falsa y II es verdadera I es falsa y II es falsa
. 16. Si (1, 1, 2); (1,1, 1); (0, , 3)a= − − −S y (0,2, )b=T , entonces 3 = ⊕R S T para
2; 3a b= = − 2; 3a b≠ = − 2; 3a b= ≠ − 2; 3a b≠ ≠ − . 17. Sean { }3
1 2 3/ 0x x x= ∈ − − =x RS y ( 1, 1,1);(1,0, 2)= − −T . Si 3 3:f →R R es una t.l. que verifica ( )f =S T y ( )f =T S , entonces (2,1,1)f puede ser igual a
(0,0,0) (2, 2,4)− (2,0,4) (4, 2,2) . 18. Sean { }(1,0,1); ;(0,1, 1)B = −v una base de 3R y 3 3:f →R R la t.l. tal que
1 1 0
0 1 1
1 1 1
( )EBM f −
−
⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟⎝ ⎠
. Si (2, 1,2) (4,5,5)f − = , entonces v es igual a
(1, 1,1)− (1, 2,1) (0,1,0) (1,3, 1)− . 19. Si ,S T y H son subespacios de 3R tales que ,⊥⊂S H ⊥⊂H T y 3+ = RS T entonces dim( ) =H
0 1 2 3 . 20. Si S y T son subespacios de 4R tales que 2 dim( ) dim( )≤ <S T , puede asegurarse que
{ }0∩ =S T { }0∩ ≠S T ∩ =S T S ∩ =S T T .
PROGRAMA ÁLGEBRA C.B.C. (PARA ALUMNOS DE CIENCIAS EXACTAS E INGENIERÍA) 1.- ÁLGEBRA VECTORIAL Puntos en el espacio n-dimensional – Vectores – Producto escalar – Norma – Rectas y planos – Producto vectorial. 2.- ESPACIOS VECTORIALES Definición – Propiedades – Subespacios – Independencia lineal – Combinación lineal – Sistemas de generadores – Bases – Dimensión – Suma e intersección de subespacios – Suma directa – Espacios con producto interno. 3.- MATRICES Y DETERMINANTES Espacios de matrices – Suma y producto de matrices – Ecuaciones lineales – Eliminación de Gauss-Jordan – Rango – Teorema de Roché-Frobenius. Determinantes – Propiedades – Determinante de un producto – Determinantes e inversas. 4.- TRANSFORMACIONES LINEALES Definición – Núcleo e imagen – Monorfismos, epimorfismos, isomorfismos – Composición de transformaciones lineales – Transformaciones lineales inversas. 5.- NÚMEROS COMPLEJOS Y POLINOMIOS Números complejos – Operaciones – Forma binómica y trigonométrica – Teorema de De Moivre – Resolución de ecuaciones – Polinomios – Grado de un polinomio – Operaciones con polinomios – Raíces – Teorema del resto – Descomposición factorial – Teorema fundamental del álgebra – Fórmula de interpolación de Lagrange. 6.- TRANSFORMACIONES LINEALES Y MATRICES Matriz de una transformación lineal – Matriz de la composición – Matriz de la inversa – Cambios de Bases. 7.- AUTOVALORES Y AUTOVECTORES Vectores y valores propios – Polinomio característico – Aplicaciones – Subespacios invariantes – Diagonalización. BIBLIOGRAFÍA ANTON, H. Introducción al álgebra lineal – Edit. Limusa. LANG, S. Algebra lineal – Fondo Educativo Interamericano. GROSSMAN, S. Algebra lineal – Grupo Editorial Iberoamérica. KUROSCH,A.G. Curso de álgebra superior – Edit. MIR. LIPSCHUTZ, S. Algebra lineal – Serie Schaum Mc.Graw Hill. GENTILE, Enzo Algebra lineal – Edit.Docencia KOLMAN,B. Algebra lineal – Fondo Educativo Interamericano. HERSTEIN,I.N. y WINTER,D.J. Algebra lineal y teoría de matrices – Grupo Editorial Iberoamérica.


















