
Expo02 El Pid
45
E l P LCcomoc on trolador E l P L Ccomocontrola d or Conceptos básicos de la Conceptos básicos de la teoría de control. teoría de control. Controles PI, PID y Controles PI, PID y Sintonía. Sintonía. Jueves, 28 de Junio de 2007
-
Upload
abiel-algravez-velarde -
Category
Documents
-
view
213 -
download
0
description
exposición PID
Transcript of Expo02 El Pid
7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 1/45
El PLC como controladorEl PLC como controlador
Conceptos básicos de laConceptos básicos de lateoría de control.teoría de control.
Controles PI, PID yControles PI, PID ySintonía.Sintonía.
Jueves, 28 de Junio de 2007

7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 2/45
ObjetivoObjetivo
El alumno evaluara las directricesEl alumno evaluara las directricesprincipios y normas de diseño deprincipios y normas de diseño decontrol optimocontrol optimo

7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 3/45
ContenidoContenido
Controles PID.Controles PID. Sistemas de lazo cerrado utilizandoSistemas de lazo cerrado utilizandocontrol Proporcional, Integral, Derivativocontrol Proporcional, Integral, DerivativoPID!.PID!.
"unci#n Derivativa."unci#n Derivativa. "unci#n Integral"unci#n Integral PID en Controladores $#gicosPID en Controladores $#gicos
ProgramablesProgramables
Sintonía de PID.Sintonía de PID. Sintonizaci#n de PID.Sintonizaci#n de PID. %&todo de sintonía '()ustar y *bservar+.%&todo de sintonía '()ustar y *bservar+.
7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 4/45
Controles PIDControles PID

7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 5/45
Sistemas de Lazo cerradoSistemas de Lazo cerradoutilizando control Proorcional,utilizando control Proorcional,
Inte!ral, Derivativo "PID#$Inte!ral, Derivativo "PID#$En el ejemplo previamente utilizado, había tres problemasEn el ejemplo previamente utilizado, había tres problemas
fundamentales con el sistema simple, utilizando solofundamentales con el sistema simple, utilizando sologanancia proporcional:ganancia proporcional:
El sistema tiene offset muy grande.El sistema tiene offset muy grande. El sistema responde lentamente a cambios en el puntoEl sistema responde lentamente a cambios en el punto
de referenciade referencia SPSP ((setpoint setpoint ).). Estos dos problemas son causados por una gananciaEstos dos problemas son causados por una ganancia
proporcionalproporcional KpKp muy pequea, de modo que cuando semuy pequea, de modo que cuando se
incrementa la ganancia para corregir estos problemas, elincrementa la ganancia para corregir estos problemas, elsistema se vuelve inestable y oscila.sistema se vuelve inestable y oscila.
Es imposible optimizar el sistema para offset pequeo,Es imposible optimizar el sistema para offset pequeo,respuesta r!pida y alta estabilidad si se utiliza solo elrespuesta r!pida y alta estabilidad si se utiliza solo el
control proporcionalcontrol proporcional

7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 6/45
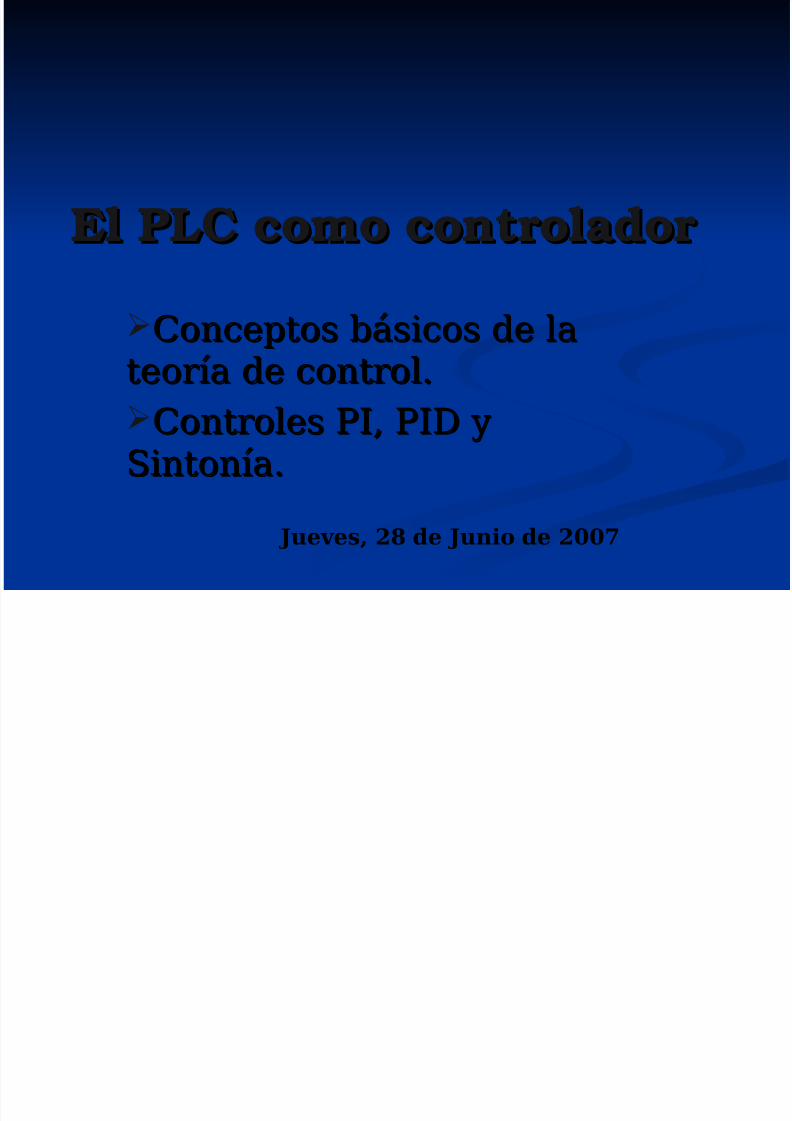
Para me)orar este arreglo de control se agreganPara me)orar este arreglo de control se agregandos unciones a nuestro sistema de lazodos unciones a nuestro sistema de lazo
cerrado, estas son- $a unci#n integral ycerrado, estas son- $a unci#n integral yla unci#n derivativa .la unci#n derivativa .
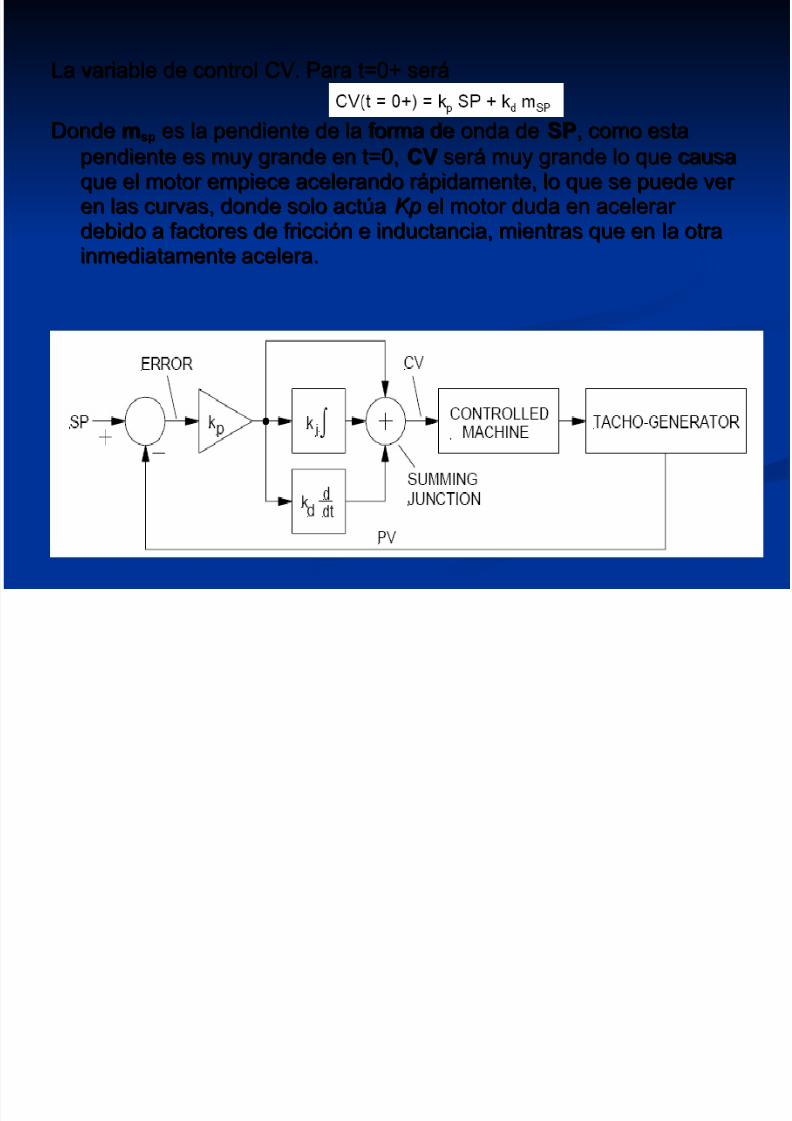
En este sistema la señal de error se amplica porEn este sistema la señal de error se amplica poruna gananciauna ganancia %% y despu&s pasa a las y despu&s pasa a las
unciones derivativas e integral.unciones derivativas e integral.
$as salidas de la ganancia proporcional, la$as salidas de la ganancia proporcional, launci#n derivativa y la unci#n integral seunci#n derivativa y la unci#n integral sesuman para producir una variable de controlsuman para producir una variable de controlC& C& . $os valores de. $os valores de %%,, %d%d y y %i%i son constantesson constantes/ue se a)ustan por el diseñador y se a)ustan a/ue se a)ustan por el diseñador y se a)ustan aun valor positivo o a uno constante.un valor positivo o a uno constante.

7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 7/45
"ara la funci#n de ganancia proporcional"ara la funci#n de ganancia proporcional KpKp, la entrada, la entradasimplemente se multiplica. "ara la funci#n derivativa, lasimplemente se multiplica. "ara la funci#n derivativa, laentrada es diferenciada y despu$s multiplicada porentrada es diferenciada y despu$s multiplicada por KdKd..
"ara la funci#n integral la entrada se integra y despu$s"ara la funci#n integral la entrada se integra y despu$sse multiplica porse multiplica por KiKi. %ay algo de interacci#n entre las. %ay algo de interacci#n entre lastres funciones, sin embargo, cada una de ellas sirve untres funciones, sin embargo, cada una de ellas sirve unespecifico y &nico prop#sito en nuestro sistema. ' pesarespecifico y &nico prop#sito en nuestro sistema. ' pesarde que los nombres de las funciones implican el uso delde que los nombres de las funciones implican el uso delcalculo, no es necesario un conocimiento muy profundocalculo, no es necesario un conocimiento muy profundo
sobre este tema.sobre este tema.
7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 8/45
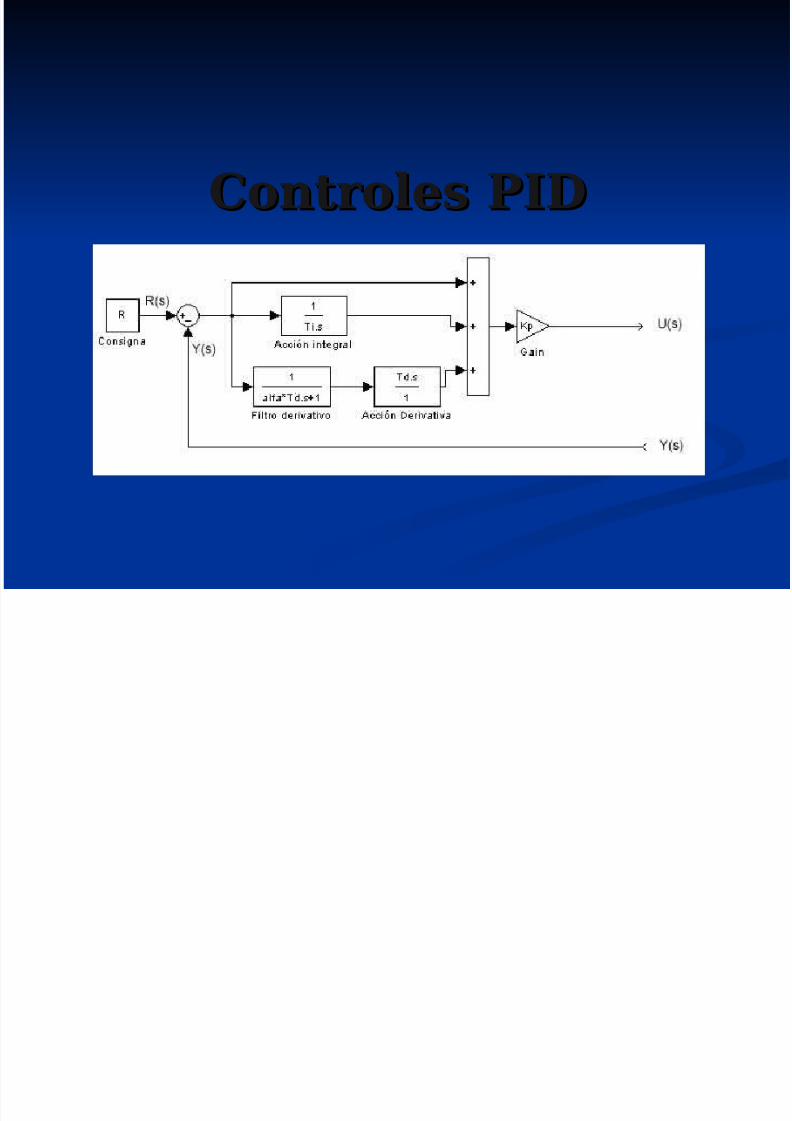
a configuraci#n del sistema "* mostrado en la figura sea configuraci#n del sistema "* mostrado en la figura se
llamallama PID idealPID ideal y es la configuraci#n mas usada eny es la configuraci#n mas usada en
control.control.

7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 9/45
E+iste otra configuraci#n para el control "* llamada "*E+iste otra configuraci#n para el control "* llamada "*"aralelo, en la cual las tres funciones se conectan en"aralelo, en la cual las tres funciones se conectan en
paralelo. uando el sistema de control esta bienparalelo. uando el sistema de control esta biensintonizado, ambas configuraciones se comportansintonizado, ambas configuraciones se comportanid$nticas.id$nticas.
7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 10/45
'unci(n Derivativa$'unci(n Derivativa$
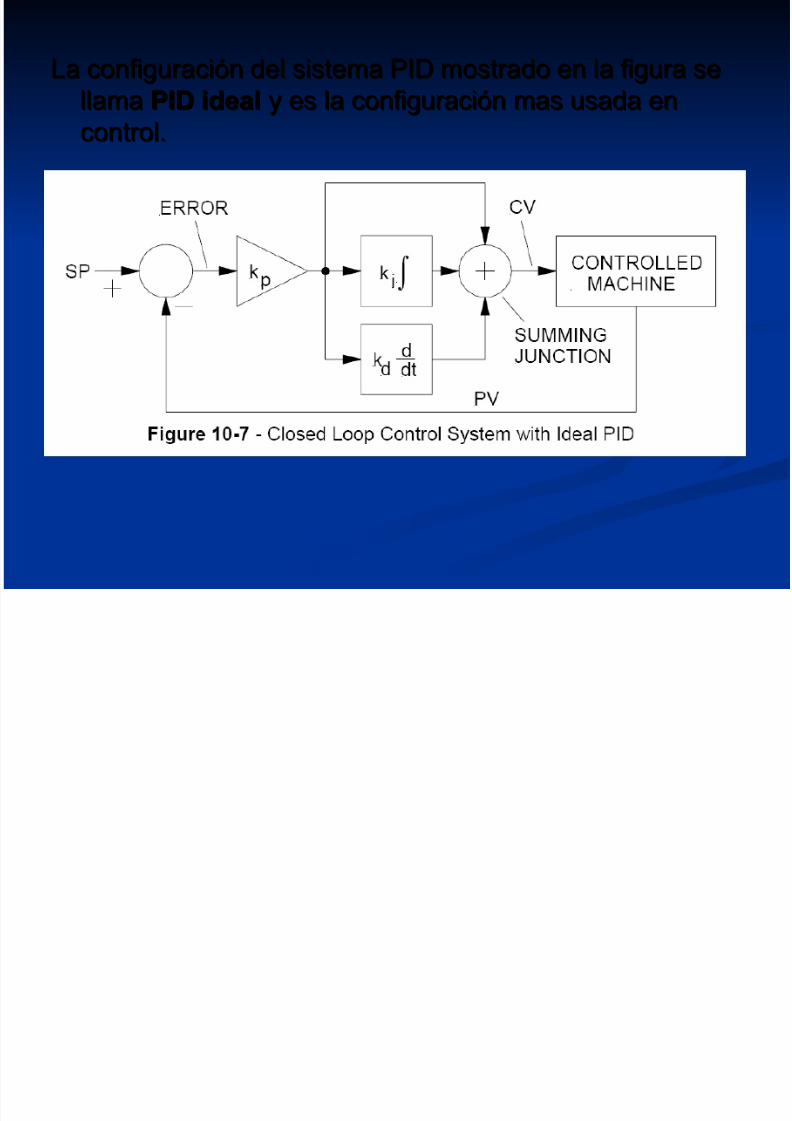
"or definici#n, la salida de una funci#n derivativa es igual a la grafica de"or definici#n, la salida de una funci#n derivativa es igual a la grafica de
la pendiente de la seal de entrada. "or ejemplo si la entrada a unala pendiente de la seal de entrada. "or ejemplo si la entrada a unafunci#n de este tipo es una seal rampa, la salida es igual a lafunci#n de este tipo es una seal rampa, la salida es igual a lapendientependiente mm de la rampa. omo lo muestra la figura. "ara la formade la rampa. omo lo muestra la figura. "ara la formade onda de la rampa se puede calcular la derivada lo que subede onda de la rampa se puede calcular la derivada lo que subedividiendo por lo que tarda en subir. Esto es:dividiendo por lo que tarda en subir. Esto es:
*onde : ambio en la amplitud*onde : ambio en la amplitud
"eriodo del cambio"eriodo del cambio
-uestra rampa tiene una pendiente de /.0 durante el periodo de tiempo-uestra rampa tiene una pendiente de /.0 durante el periodo de tiempode / a 1 segundos y una pendiente de 2/.0 en el periodo de 1 a 3de / a 1 segundos y una pendiente de 2/.0 en el periodo de 1 a 3segundos.segundos.
7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 11/45
omo otro ejemplo, si la entrada a una funci#n derivativa es una sealomo otro ejemplo, si la entrada a una funci#n derivativa es una seal
*, la salida ser! cero, para cualquier valor de la seal de *.*, la salida ser! cero, para cualquier valor de la seal de *.
uando la seal de entrada es una funci#n que no es ni * ni unauando la seal de entrada es una funci#n que no es ni * ni unarampa, por ejemplo si la entrada es una senoidal, es difícil calcularrampa, por ejemplo si la entrada es una senoidal, es difícil calcularsu derivada, debido a que siempre esta cambiando.su derivada, debido a que siempre esta cambiando.
' pesar de que la salida al sistema se puede determinar usando ' pesar de que la salida al sistema se puede determinar usando
calculo, en el caso del control de procesos, no es necesariocalculo, en el caso del control de procesos, no es necesario
conocer los valores e+actos para la derivada, un valor apro+imadoconocer los valores e+actos para la derivada, un valor apro+imadoes suficiente. 'dem!s e+isten formas alternativas para calcular laes suficiente. 'dem!s e+isten formas alternativas para calcular la
derivada de una seal sin usar calculo.derivada de una seal sin usar calculo.omo la derivada, por lo general, se realiza mediante unaomo la derivada, por lo general, se realiza mediante una
computadora digital (4n " o un microcontrolador), el sistemacomputadora digital (4n " o un microcontrolador), el sistemadigital puede calcular f!cil, r!pida y repetidamentedigital puede calcular f!cil, r!pida y repetidamente
5e usa esta apro+imaci#n de muestreo de la derivada como un5e usa esta apro+imaci#n de muestreo de la derivada como un
sustituto de la derivada continua, aun cuando la forma de entradasustituto de la derivada continua, aun cuando la forma de entradasea no lineal.sea no lineal.
uando una derivada es calculada en esta forma, se le llama *erivadauando una derivada es calculada en esta forma, se le llama *erivada
*iscreta, *erivada num$rica o funci#n de *iferencias.*iscreta, *erivada num$rica o funci#n de *iferencias.
7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 12/45
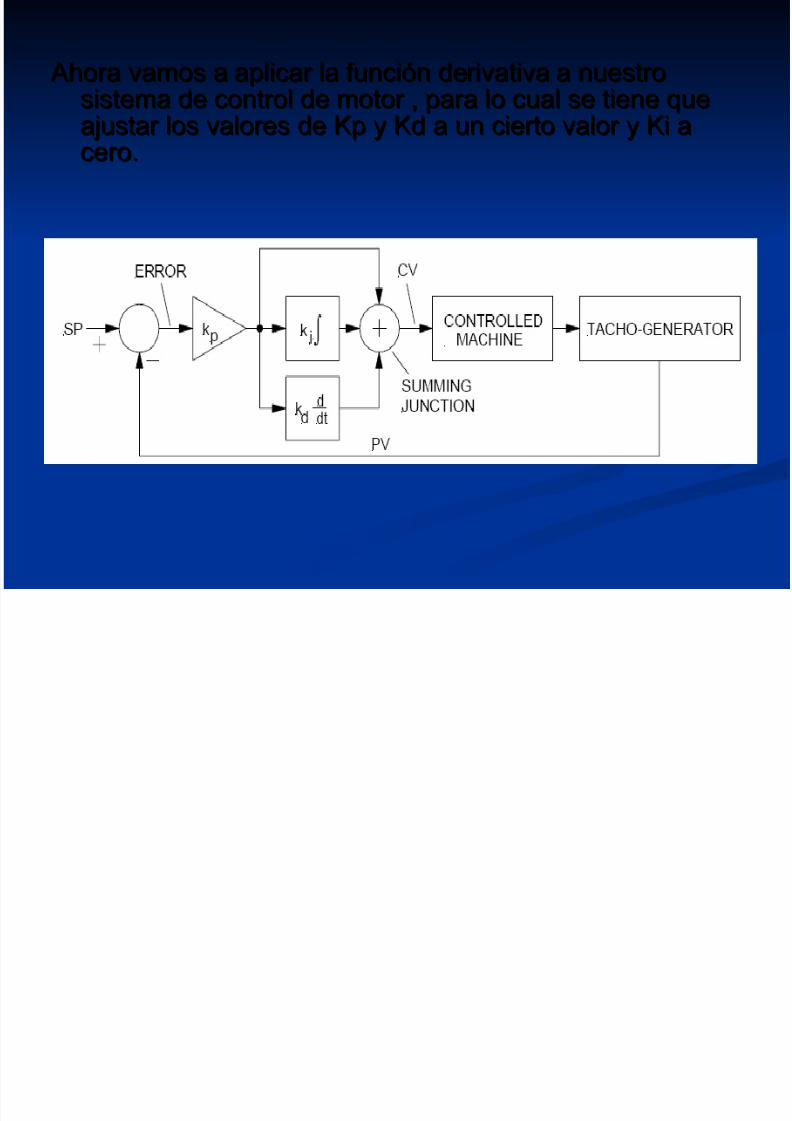
'hora vamos a aplicar la funci#n derivativa a nuestro 'hora vamos a aplicar la funci#n derivativa a nuestrosistema de control de motor , para lo cual se tiene quesistema de control de motor , para lo cual se tiene que
ajustar los valores de 6p y 6d a un cierto valor y 6i aajustar los valores de 6p y 6d a un cierto valor y 6i acero.cero.
7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 13/45
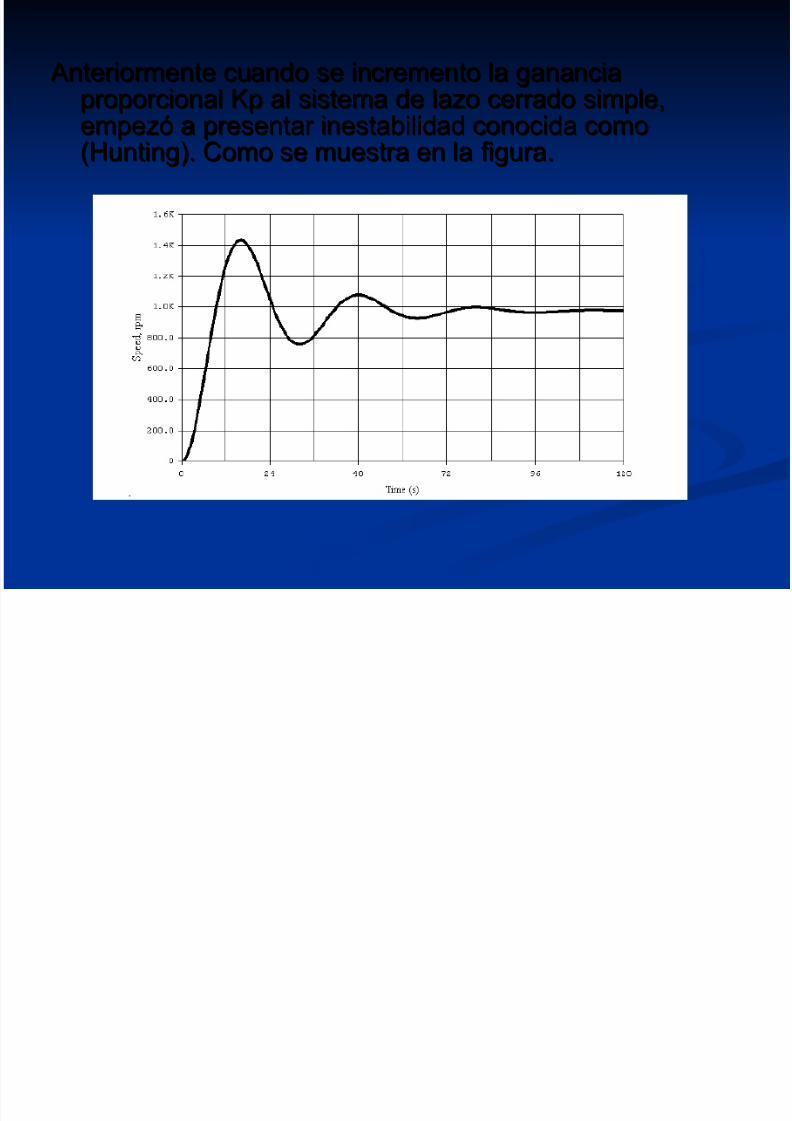
'nteriormente cuando se incremento la ganancia 'nteriormente cuando se incremento la gananciaproporcional 6p al sistema de lazo cerrado simple,proporcional 6p al sistema de lazo cerrado simple,
empez# a presentar inestabilidad conocida comoempez# a presentar inestabilidad conocida como(%unting). omo se muestra en la figura.(%unting). omo se muestra en la figura.
7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 14/45
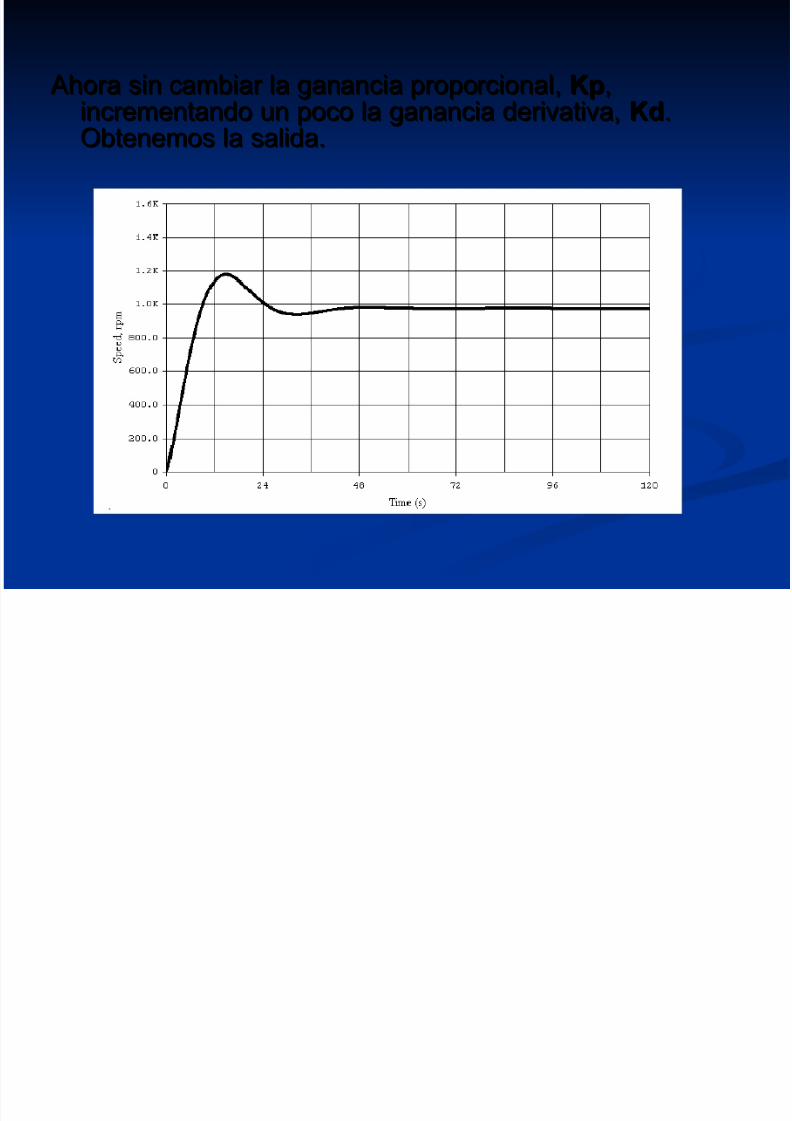
'hora sin cambiar la ganancia proporcional, 'hora sin cambiar la ganancia proporcional, KpKp,,incrementando un poco la ganancia derivativa,incrementando un poco la ganancia derivativa, KdKd..
7btenemos la salida.7btenemos la salida.

7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 15/45
5i comparamos ambas graficas notamos algunas5i comparamos ambas graficas notamos algunasdiferencias, tenemos que en la segunda grafica ladiferencias, tenemos que en la segunda grafica lavelocidad del motor se acelera en el tiempo t8/ , lavelocidad del motor se acelera en el tiempo t8/ , la
velocidad mas alta que el motor alcanza mientras estavelocidad mas alta que el motor alcanza mientras estaen su estado transitorio (%unting) y el tiempo que tardaen su estado transitorio (%unting) y el tiempo que tardaen estabilizarse.en estabilizarse.

7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 16/45
"ara ver porque la adici#n de una ganancia derivativa"ara ver porque la adici#n de una ganancia derivativacausa una mejora tan dram!tica en el sistema tenemoscausa una mejora tan dram!tica en el sistema tenemos
que considerar la din!mica del sistema.que considerar la din!mica del sistema."rimero cuando t8/, el punto de referencia,"rimero cuando t8/, el punto de referencia, SPSP cambia decambia de
cero al voltaje correspondiente a la velocidad deseada,cero al voltaje correspondiente a la velocidad deseada,en este caso para una velocidad de 9/// rpm. omo elen este caso para una velocidad de 9/// rpm. omo elmotor no esta rotando la salida del tac#metro es cero, ymotor no esta rotando la salida del tac#metro es cero, y
la variable del procesola variable del proceso PVPV es cero. "or lo tanto, la seales cero. "or lo tanto, la sealde error en ese instante es igual a la amplitud y forma dede error en ese instante es igual a la amplitud y forma deonda del punto de referenciaonda del punto de referencia SPSP. uando t8/ el. uando t8/ el SPSP seseenciende, la forma de onda va a tener una pendienteenciende, la forma de onda va a tener una pendiente
muy alta, lo que causa que la funci#n derivativa tengamuy alta, lo que causa que la funci#n derivativa tengauna salida muy grande positiva.una salida muy grande positiva. a salida de la funci#na salida de la funci#n
derivativa se suma a la salida de la gananciaderivativa se suma a la salida de la gananciaproporcional, para formar la variable de controlproporcional, para formar la variable de control CVCV..
7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 17/45
a variable de control . "ara t8/ ser!a variable de control . "ara t8/ ser!
*onde*onde mmspsp es la pendiente de la forma de onda dees la pendiente de la forma de onda de SPSP, como esta, como estapendiente es muy grande en t8/,pendiente es muy grande en t8/, CVCV ser! muy grande lo que causaser! muy grande lo que causa
que el motor empiece acelerando r!pidamente, lo que se puede verque el motor empiece acelerando r!pidamente, lo que se puede veren las curvas, donde solo act&aen las curvas, donde solo act&a KpKp el motor duda en acelerarel motor duda en acelerardebido a factores de fricci#n e inductancia, mientras que en la otradebido a factores de fricci#n e inductancia, mientras que en la otra
inmediatamente acelera.inmediatamente acelera.
7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 18/45
*espu$s de t8/,*espu$s de t8/, SPSP es un valor constante y la seal dees un valor constante y la seal deerror ser!error ser! SPSP menos el valor demenos el valor de PVPV, la pendiente del, la pendiente del
voltaje de error es de polaridad contraria a la pendientevoltaje de error es de polaridad contraria a la pendientedede PVPV, esto es que el error se incrementa conforme, esto es que el error se incrementa conforme PVPV se decrementa y viceversa. Esto es, la pendiente de lase decrementa y viceversa. Esto es, la pendiente de laseal de error es el negativo de la pendiente deseal de error es el negativo de la pendiente de PVPV, y a, y asu vez la salida de la funci#n derivativa ser! igual alsu vez la salida de la funci#n derivativa ser! igual al
negativo de la pendiente de la curva de velocidad, pornegativo de la pendiente de la curva de velocidad, porlo que para t;/:lo que para t;/:
omo laomo la PVPV tiene la misma forma de onda que latiene la misma forma de onda que lavelocidad, la ecuaci#n queda:velocidad, la ecuaci#n queda:

7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 19/45
Entonces la funci#n derivativa tiende a reducir laEntonces la funci#n derivativa tiende a reducir laaceleraci#n o la desaceleraci#n, de modo que laaceleraci#n o la desaceleraci#n, de modo que la
cantidad decantidad de huntinghunting para que el motor alcance supara que el motor alcance suvelocidad se ve reducido conforme se aumentavelocidad se ve reducido conforme se aumenta KdKd,,tambi$n se puede mejorar el offset incrementandotambi$n se puede mejorar el offset incrementando KpKp sin problemas de inestabilidad.sin problemas de inestabilidad.

7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 20/45
ncrementando ligeramente 6d en nuestro sistema dencrementando ligeramente 6d en nuestro sistema decontrol de motor por un factor de 3 veces, tenemos quecontrol de motor por un factor de 3 veces, tenemos queya no e+iste un sobre impulso y el tiempo de respuestaya no e+iste un sobre impulso y el tiempo de respuesta
mejoro considerablemente, sin embargo el diseadormejoro considerablemente, sin embargo el diseadordebe tomar en cuenta, voltajes y corrientes transitorias,debe tomar en cuenta, voltajes y corrientes transitorias,así como fuerzas mec!nicas, que pueden daar alasí como fuerzas mec!nicas, que pueden daar alsistema.sistema.

7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 21/45
ncrementando la ganancia de la funci#n derivativa, sencrementando la ganancia de la funci#n derivativa, seelimina el sobre impulso y el %unting, pero esto no tieneelimina el sobre impulso y el %unting, pero esto no tiene
efectos en el offset. <inalmente podemos decir que:efectos en el offset. <inalmente podemos decir que:
En un sistema de control PID bien En un sistema de control PID bienajustado, la función derivativaajustado, la función derivativa
mejora el tiempo de respuesta delmejora el tiempo de respuesta delsistema, reduciendo el sobresistema, reduciendo el sobreimpulso y el hunting o transitorio,impulso y el hunting o transitorio,también se puede incrementar latambién se puede incrementar la
ganancia proporcional sin afectarganancia proporcional sin afectarla estabilidad del sistema, reducirla estabilidad del sistema, reducirel oset y el tiempo de estabilidad.el oset y el tiempo de estabilidad.
7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 22/45
'unci(n inte!ral'unci(n inte!ral
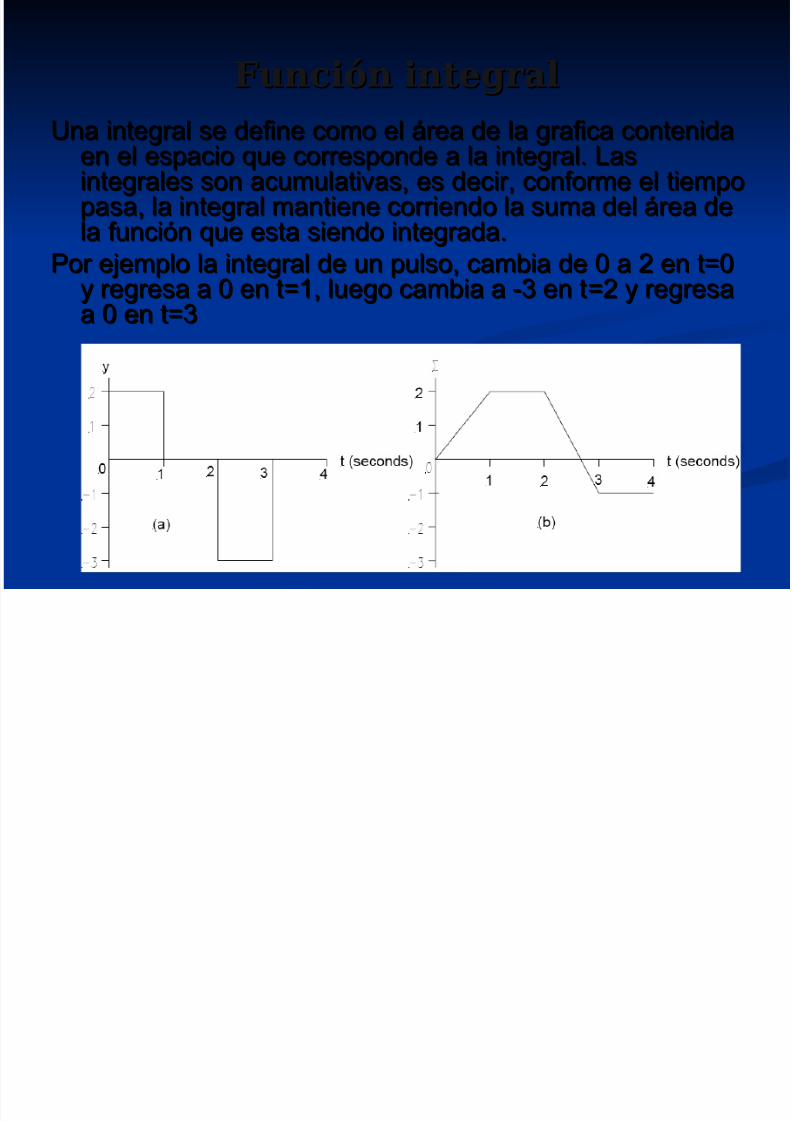
4na integral se define como el !rea de la grafica contenida4na integral se define como el !rea de la grafica contenidaen el espacio que corresponde a la integral. asen el espacio que corresponde a la integral. asintegrales son acumulativas, es decir, conforme el tiempointegrales son acumulativas, es decir, conforme el tiempopasa, la integral mantiene corriendo la suma del !rea depasa, la integral mantiene corriendo la suma del !rea dela funci#n que esta siendo integrada.la funci#n que esta siendo integrada.
"or ejemplo la integral de un pulso, cambia de / a 1 en t8/"or ejemplo la integral de un pulso, cambia de / a 1 en t8/y regresa a / en t89, luego cambia a 2= en t81 y regresay regresa a / en t89, luego cambia a 2= en t81 y regresaa / en t8=a / en t8=

7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 23/45
uando t8/ se supone que la integral es cero, conformeuando t8/ se supone que la integral es cero, conformepasa el tiempo de / a 9, el !rea va aumentando enpasa el tiempo de / a 9, el !rea va aumentando enforma lineal, cuando t89 deja de incrementarse el !reaforma lineal, cuando t89 deja de incrementarse el !reaque se queda en un valor de 1, hasta t81 cuando laque se queda en un valor de 1, hasta t81 cuando laentrada cambia a 2= y el !rea se vuelve negativa por loentrada cambia a 2= y el !rea se vuelve negativa por loque se va reduciendo en forma lineal, hasta que t8=que se va reduciendo en forma lineal, hasta que t8=donde se queda en 29 y deja de acumularse !rea.donde se queda en 29 y deja de acumularse !rea.
Entonces se dice que el !rea acumulada de t8/ a t83 esEntonces se dice que el !rea acumulada de t8/ a t83 es
29, de este modo se calcula el !rea acumulada en para29, de este modo se calcula el !rea acumulada en paracualquier valor de t, por ejemplo para t8/.0 el !rea es 9.cualquier valor de t, por ejemplo para t8/.0 el !rea es 9.
El proceso de integraci#n parece simple para el ejemploEl proceso de integraci#n parece simple para el ejemplovisto, sin embargo, si deseamos calcular la integral devisto, sin embargo, si deseamos calcular la integral de
una funci#n que no sea constante o rampa, como unauna funci#n que no sea constante o rampa, como unasenoidal el problema se vuelve mas complicado ysenoidal el problema se vuelve mas complicado yrequiere el uso de calculo, lo que seria muy pesado pararequiere el uso de calculo, lo que seria muy pesado paraun sistema de control como un ".un sistema de control como un ".
7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 24/45
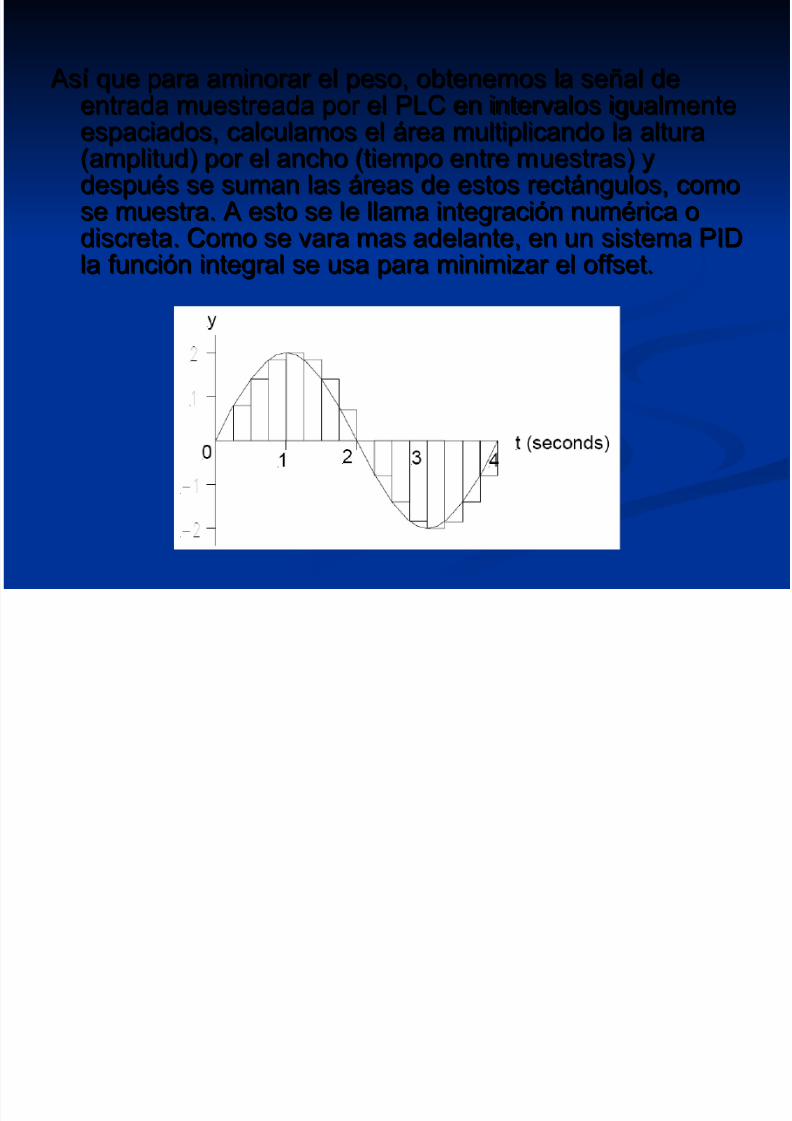
'sí que para aminorar el peso, obtenemos la seal de 'sí que para aminorar el peso, obtenemos la seal deentrada muestreada por el " en intervalos igualmenteentrada muestreada por el " en intervalos igualmente
espaciados, calculamos el !rea multiplicando la alturaespaciados, calculamos el !rea multiplicando la altura(amplitud) por el ancho (tiempo entre muestras) y(amplitud) por el ancho (tiempo entre muestras) ydespu$s se suman las !reas de estos rect!ngulos, comodespu$s se suman las !reas de estos rect!ngulos, comose muestra. ' esto se le llama integraci#n num$rica ose muestra. ' esto se le llama integraci#n num$rica odiscreta. omo se vara mas adelante, en un sistema "*discreta. omo se vara mas adelante, en un sistema "*la funci#n integral se usa para minimizar el offset.la funci#n integral se usa para minimizar el offset.

7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 25/45
uando se usa un sistema "*, el integrador tiene unuando se usa un sistema "*, el integrador tiene unproblema ya que conserva el !rea acumulada desde elproblema ya que conserva el !rea acumulada desde el
momento en que se encendi# el sistema, de modo quemomento en que se encendi# el sistema, de modo quesi no esta trabajando, un error constante puedesi no esta trabajando, un error constante puedeacumular valores del !rea muy grandes, si esto seacumular valores del !rea muy grandes, si esto sepermite, estos valores pueden causar problemas en elpermite, estos valores pueden causar problemas en elsistema, por eso se fija un valor en lasistema, por eso se fija un valor en la CVCV a partir dela partir del
cual ya no se calcula la integral, a este limite se le llamacual ya no se calcula la integral, a este limite se le llamasaturaci#n.saturaci#n.
En un sistema de lazo cerrado, si hay un offset en laEn un sistema de lazo cerrado, si hay un offset en larespuesta, habr! una seal de error diferente de cero,respuesta, habr! una seal de error diferente de cero,esto debido a que elesto debido a que el PVPV y ely el SPSP son diferentes, como lason diferentes, como la
entrada de la funci#n integral la toma del mismo puntoentrada de la funci#n integral la toma del mismo puntoque la funci#n derivativa, a integral va a comenzar laque la funci#n derivativa, a integral va a comenzar lasuma del error despu$s de tiempo.suma del error despu$s de tiempo.

7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 26/45
"ara offsets muy grandes, la integral se va a acumular"ara offsets muy grandes, la integral se va a acumularr!pidamente y para offsets pequeos, la salida de lar!pidamente y para offsets pequeos, la salida de laintegral va a cambiar mas lentamente, sin embargo,integral va a cambiar mas lentamente, sin embargo,mientras haya un error la salida de la integral va amientras haya un error la salida de la integral va acambiar en direcci#n que va a reducir el offset.cambiar en direcci#n que va a reducir el offset.

7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 27/45
"ara el sistema de control de velocidad del motor, se"ara el sistema de control de velocidad del motor, semuestra el resultado de incrementarmuestra el resultado de incrementar KiKi , la respuesta, la respuestatransitoria a cambiado un poco y ahora el offset es cero.transitoria a cambiado un poco y ahora el offset es cero.
5i se incrementa demasiado el valor de5i se incrementa demasiado el valor de KiKi las funcioneslas funcionesintegral y la proporcional empiezan a trabajar en contra,integral y la proporcional empiezan a trabajar en contra,lo que hace al sistema mas inestable, puede tener sobrelo que hace al sistema mas inestable, puede tener sobreimpulso, hunting o puede llegar a oscilar.impulso, hunting o puede llegar a oscilar.
7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 28/45
<inalmente podemos decir que:<inalmente podemos decir que:
En un sistema de lao cerrado PID, En un sistema de lao cerrado PID,la función integral acumula ella función integral acumula elerror y lo corrige a !ue sea ceroerror y lo corrige a !ue sea cero
o casi cero.o casi cero.
7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 29/45
)l PID en los Controladores)l PID en los ControladoresL(!icos Pro!ramables$L(!icos Pro!ramables$
uando se utiliza un " hay ciertas diferencias que hayuando se utiliza un " hay ciertas diferencias que hayque tomar en cuenta para implementar un sistema "* yque tomar en cuenta para implementar un sistema "* yajustar los valores de sus ganancias.ajustar los valores de sus ganancias.
El " realiza las operaciones del "* en forma iterativa.El " realiza las operaciones del "* en forma iterativa.
Esto es que los c!lculos del "* no se hacen en formaEsto es que los c!lculos del "* no se hacen en formacontinua, sino que son disparados por un trigger de unacontinua, sino que son disparados por un trigger de unafunci#n de tiempo.funci#n de tiempo.
uando ocurre el trigger, se muestreanuando ocurre el trigger, se muestrean SPSP yy PVPV, despu$s, despu$stodas las funciones, proporcional, integral y derivativa setodas las funciones, proporcional, integral y derivativa secalculan y se suman para formar elcalculan y se suman para formar el CVCV, luego el "* se, luego el "* sedetiene hasta el siguiente trigger.detiene hasta el siguiente trigger.

7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 30/45
a e+presi#n e+acta, para el "* paralelo es:a e+presi#n e+acta, para el "* paralelo es:
"ero como el " realiza estas operaciones en el tiempo"ero como el " realiza estas operaciones en el tiempodiscreto, esto es muestreados con un intervalo , eldiscreto, esto es muestreados con un intervalo , el"* discreto realizado por el " es:"* discreto realizado por el " es:
*onde:*onde:
Es la seal de error.Es la seal de error.
Es la suma de las !reas de la seal de error enEs la suma de las !reas de la seal de error en
un intervalo de tiempo, empezando de t8/ al presente.un intervalo de tiempo, empezando de t8/ al presente. Es la pendiente o derivaci#n num$rica de laEs la pendiente o derivaci#n num$rica de laseal de error, el numerador es el error presente menosseal de error, el numerador es el error presente menosel anterior.el anterior.

7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 31/45
'dem!s para ajustar el "* de una manera mas met#dica, 'dem!s para ajustar el "* de una manera mas met#dica,muchos fabricantes reemplazaron los t$rminosmuchos fabricantes reemplazaron los t$rminos KiKi por elpor elde constante de tiempo de reset (de constante de tiempo de reset (reset time constantreset time constantTiTi) que es) que es Ti=1/KiTi=1/Ki . 5imilarmente se ha reemplazado. 5imilarmente se ha reemplazadoKdKd por la constante de tiempo derivativo (por la constante de tiempo derivativo (derivativederivativetime constant Tdtime constant Td) donde) donde Td=1/KdTd=1/Kd, por lo que nuestra, por lo que nuestrae+presi#n parae+presi#n para CVCV se convierte en:se convierte en:
'lgunos sistemas como los hornos, responden lentamente 'lgunos sistemas como los hornos, responden lentamentepor lo que es un desperdicio tener al " muestreandopor lo que es un desperdicio tener al " muestreando
a milisegundos, por lo que se permite al diseadora milisegundos, por lo que se permite al diseadorajustar los tiempos de muestreo, lo que reduce la cargaajustar los tiempos de muestreo, lo que reduce la cargade trabajo innecesario al sistemade trabajo innecesario al sistema

7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 32/45
Sinton*a de PIDSinton*a de PID
7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 33/45
Sintonizaci(n de PIDSintonizaci(n de PID
5intonizar al "* es un proceso subjetivo que requiere que el5intonizar al "* es un proceso subjetivo que requiere que el
diseador este muy familiarizado con las características deldiseador este muy familiarizado con las características delsistema. El diseador tambi$n debe de tomar en cuenta desistema. El diseador tambi$n debe de tomar en cuenta de
cambios en la respuesta del sistema si la carga en lacambios en la respuesta del sistema si la carga en la
maquina cambia.maquina cambia.
>ambi$n pueden ocurrir problemas con el "* si el sistema>ambi$n pueden ocurrir problemas con el "* si el sistematiene respuestas no lineales a entradas detiene respuestas no lineales a entradas de CVCV. "ara los. "ara los
cuales se deben hacer consideraciones especiales.cuales se deben hacer consideraciones especiales.
7tro problema con el "* puede ocurrir cuando un sistema7tro problema con el "* puede ocurrir cuando un sistema
tiene doble modo de operaci#n, por ejemplo un sistema quetiene doble modo de operaci#n, por ejemplo un sistema que
requiere de controlar en forma r!pida y precisa larequiere de controlar en forma r!pida y precisa latemperatura de un liquido, para calentar requerir! de algunatemperatura de un liquido, para calentar requerir! de alguna
simple operaci#n con heaters, pero para enfriar deber!simple operaci#n con heaters, pero para enfriar deber!
utilizar alg&n sistema de enfriamiento por agua o por gas.utilizar alg&n sistema de enfriamiento por agua o por gas.

7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 34/45
ualquier diseador que este familiarizado con losualquier diseador que este familiarizado con los
fundamentos de los "* puede eventualmente sintonizarfundamentos de los "* puede eventualmente sintonizar
un controlador para que el sistema respondaun controlador para que el sistema responda
correctamente y sea estable, pero para sintonizar uncorrectamente y sea estable, pero para sintonizar un
"* r!pida y eficientemente no solo requiere conocer la"* r!pida y eficientemente no solo requiere conocer la
teoría del funcionamiento de los "*, sino que tambi$nteoría del funcionamiento de los "*, sino que tambi$n
debe estar familiarizado en como responde la maquinadebe estar familiarizado en como responde la maquina
en particular a laen particular a la CVCV y e+periencia ajustando "*?s.y e+periencia ajustando "*?s.
"areciera que cada diseador tiene su propia forma para"areciera que cada diseador tiene su propia forma para
sintonizar un sistema "*. 5in embargo hay dossintonizar un sistema "*. 5in embargo hay dos
m$todos fundamentales que pueden resultar para unom$todos fundamentales que pueden resultar para uno
que es nuevo, sin embargo como muchos m$todos esteque es nuevo, sin embargo como muchos m$todos esteajuste ser! superficial y requerir! de un ajuste mas finoajuste ser! superficial y requerir! de un ajuste mas fino
fine tunning), para alcanzar un buen desempeofine tunning), para alcanzar un buen desempeo

7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 35/45
>e#ricamente, es posible calcular matem!ticamente los>e#ricamente, es posible calcular matem!ticamente los
par!metros del "*, y predecir el funcionamiento de lapar!metros del "*, y predecir el funcionamiento de la
maquina para este ajuste de par!metros, sin embargo,maquina para este ajuste de par!metros, sin embargo,
la funci#n de transferencia de la maquina debe de serla funci#n de transferencia de la maquina debe de ser
muy e+acta. El modelado de funciones de transferenciamuy e+acta. El modelado de funciones de transferencia
requiere la consideraci#n de par!metros como losrequiere la consideraci#n de par!metros como los
par!metros mec!nicos como fuerzas, pesos, masas,par!metros mec!nicos como fuerzas, pesos, masas,
inercia, fricci#n, factor de amortiguamiento, m#dulo deinercia, fricci#n, factor de amortiguamiento, m#dulo deyoung, etc. , tambi$n de par!metros el$ctricos comoyoung, etc. , tambi$n de par!metros el$ctricos como
inductancias, capacitancias, resistencias y actores deinductancias, capacitancias, resistencias y actores de
potencia. o cual es muy difícil, sino imposible depotencia. o cual es muy difícil, sino imposible de
determinar, "or lo que muchos diseadores ajustan aldeterminar, "or lo que muchos diseadores ajustan al"* con algunos m$todos semejantes al "rueba y error."* con algunos m$todos semejantes al "rueba y error.
7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 36/45
+todo de sinton*a -.justar /+todo de sinton*a -.justar /ObservarObservar
Este m$todo consiste en hacerle unos ajustes a las constantes de "*,Este m$todo consiste en hacerle unos ajustes a las constantes de "*,
observar la respuesta de la maquina y despu$s sabiendo comoobservar la respuesta de la maquina y despu$s sabiendo como
afecta cada funci#n, volver a hacer ajustes para corregirafecta cada funci#n, volver a hacer ajustes para corregir
propiedades indeseables de la respuesta de la maquina.propiedades indeseables de la respuesta de la maquina.
@a habíamos visto los efectos de las variables del "*.@a habíamos visto los efectos de las variables del "*.
9. ncrementar la ganancia proporcional 6p, resulta en una respuesta9. ncrementar la ganancia proporcional 6p, resulta en una respuestamas r!pida y reduce (pero no elimina) el offset, sin embargomas r!pida y reduce (pero no elimina) el offset, sin embargo
tambi$n produce sobre impulso, hunting y oscilaci#n.tambi$n produce sobre impulso, hunting y oscilaci#n.
1. ncrementar la constante de tiempo derivativa >d reduce el hunting y el1. ncrementar la constante de tiempo derivativa >d reduce el hunting y el
sobre impulso, causado por incrementar la ganancia proporcional, pero nosobre impulso, causado por incrementar la ganancia proporcional, pero no
corrige el offset.corrige el offset.
=. *ecrementando la constante de tiempo integral >i, causa que el "* reduzca=. *ecrementando la constante de tiempo integral >i, causa que el "* reduzca
el offset a casi cero, valores mas pequeos de >i causan que el offset seel offset a casi cero, valores mas pequeos de >i causan que el offset se
elimine mas r!pido, pero valores muy pequeos de >i causan oscilaci#nelimine mas r!pido, pero valores muy pequeos de >i causan oscilaci#n
7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 37/45
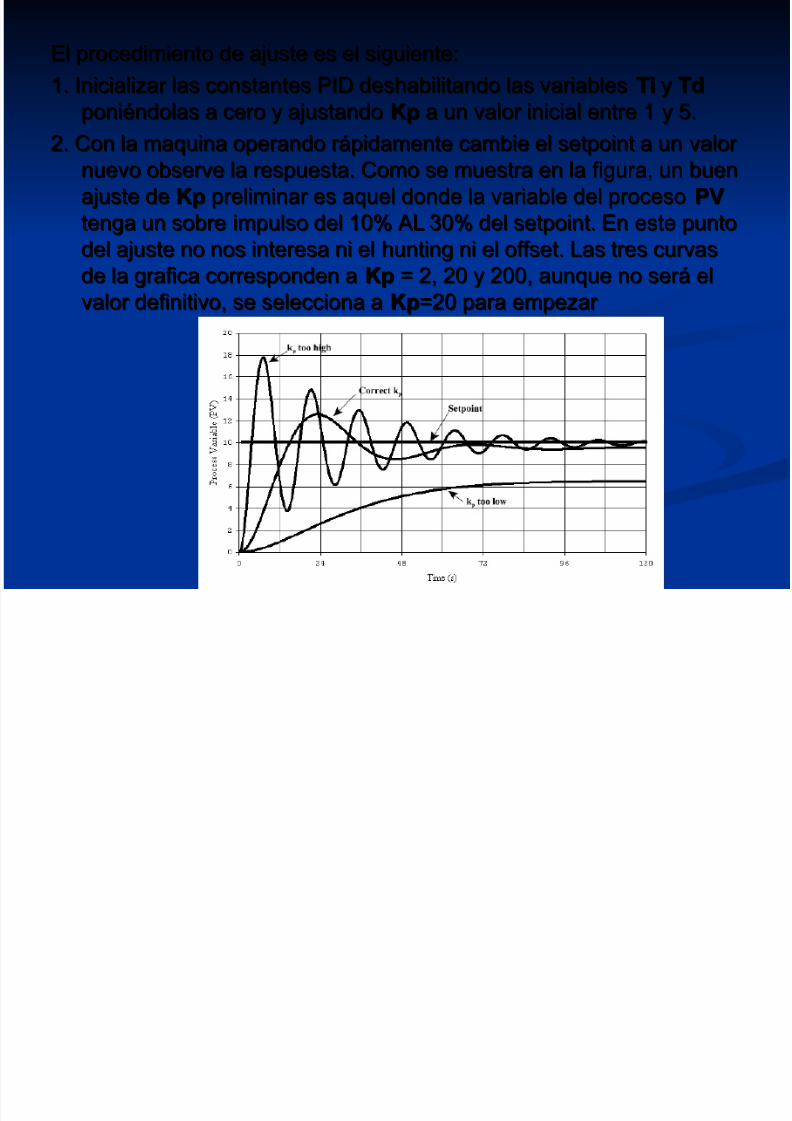
El procedimiento de ajuste es el siguiente:El procedimiento de ajuste es el siguiente:
9. nicializar las constantes "* deshabilitando las variables9. nicializar las constantes "* deshabilitando las variables TiTi yy TdTd
poni$ndolas a cero y ajustandoponi$ndolas a cero y ajustando KpKp a un valor inicial entre 9 y 0.a un valor inicial entre 9 y 0.
1. on la maquina operando r!pidamente cambie el setpoint a un valor1. on la maquina operando r!pidamente cambie el setpoint a un valornuevo observe la respuesta. omo se muestra en la figura, un buennuevo observe la respuesta. omo se muestra en la figura, un buen
ajuste deajuste de KpKp preliminar es aquel donde la variable del procesopreliminar es aquel donde la variable del proceso PVPV
tenga un sobre impulso del 9/A ' =/A del setpoint. En este puntotenga un sobre impulso del 9/A ' =/A del setpoint. En este punto
del ajuste no nos interesa ni el hunting ni el offset. as tres curvasdel ajuste no nos interesa ni el hunting ni el offset. as tres curvas
de la grafica corresponden ade la grafica corresponden a KpKp 8 1, 1/ y 1//, aunque no ser! el8 1, 1/ y 1//, aunque no ser! elvalor definitivo, se selecciona avalor definitivo, se selecciona a KpKp81/ para empezar 81/ para empezar

7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 38/45
=. ncrementar >d hasta que el sobre impulso se reduzca a un nivel=. ncrementar >d hasta que el sobre impulso se reduzca a un niveldeseado, si no se desea ning&n sobre impulso, se incrementa >d.deseado, si no se desea ning&n sobre impulso, se incrementa >d.En la figura se muestran varias graficas para distintos valores deEn la figura se muestran varias graficas para distintos valores de>d con un 6p81/, en nuestro sistema deseamos un mínimo sobre>d con un 6p81/, en nuestro sistema deseamos un mínimo sobreimpulso, para lo cual utilizamos >d8B.impulso, para lo cual utilizamos >d8B.
7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 39/45
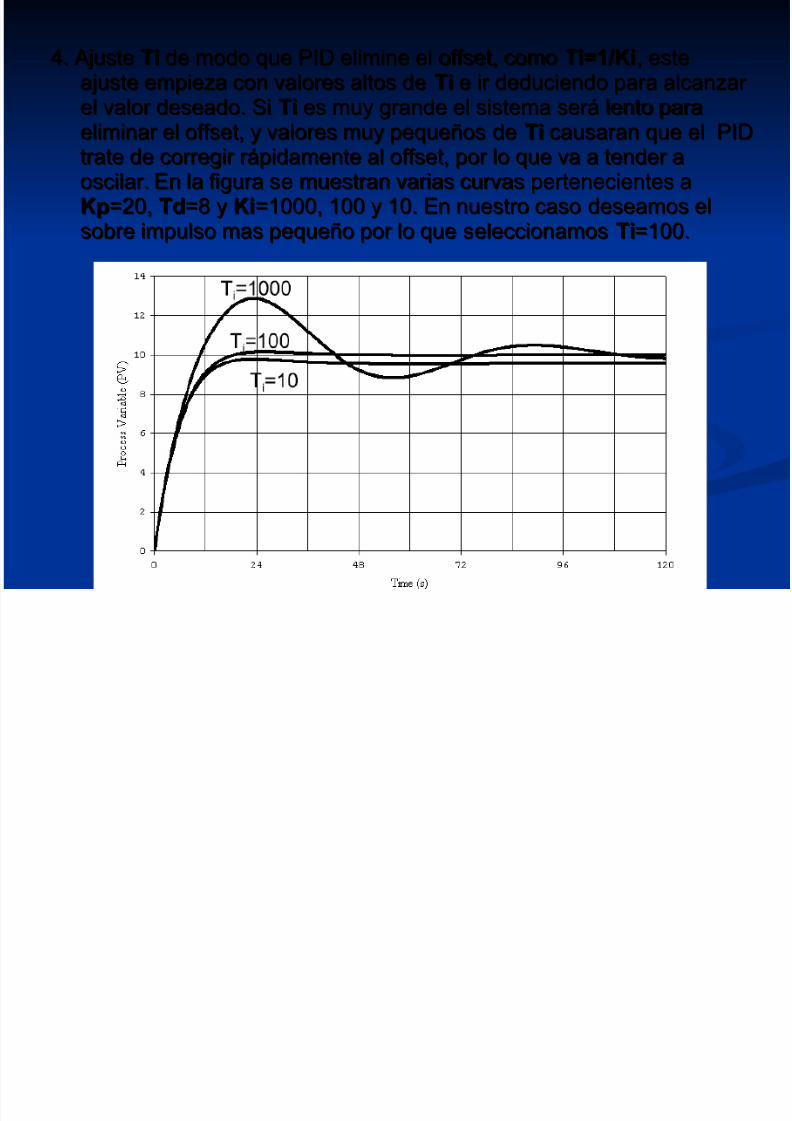
3. 'juste3. 'juste TiTi de modo que "* elimine el offset, comode modo que "* elimine el offset, como Ti=1/KiTi=1/Ki, este, este
ajuste empieza con valores altos deajuste empieza con valores altos de TiTi e ir deduciendo para alcanzare ir deduciendo para alcanzar
el valor deseado. 5iel valor deseado. 5i TiTi es muy grande el sistema ser! lento paraes muy grande el sistema ser! lento para
eliminar el offset, y valores muy pequeos deeliminar el offset, y valores muy pequeos de
TiTi
causaran que el "*causaran que el "*
trate de corregir r!pidamente al offset, por lo que va a tender atrate de corregir r!pidamente al offset, por lo que va a tender aoscilar. En la figura se muestran varias curvas pertenecientes aoscilar. En la figura se muestran varias curvas pertenecientes a
KpKp81/,81/, TdTd8B y8B y KiKi89///, 9// y 9/. En nuestro caso deseamos el89///, 9// y 9/. En nuestro caso deseamos el
sobre impulso mas pequeo por lo que seleccionamossobre impulso mas pequeo por lo que seleccionamos TiTi89//.89//.
7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 40/45
4na vez que el "* se termino de ajustar el diseador, puede hacer4na vez que el "* se termino de ajustar el diseador, puede hacer
mas ajustes a las tres constantes si así lo desea, a partir de estemas ajustes a las tres constantes si así lo desea, a partir de este
punto el diseador tiene la opci#n de mover los valores de 6p en unpunto el diseador tiene la opci#n de mover los valores de 6p en un
rango mas amplio, esto para obtener respuestas mas r!pidas a unrango mas amplio, esto para obtener respuestas mas r!pidas a uncambio en el setpoint. 5i el sistema va a operar con cargascambio en el setpoint. 5i el sistema va a operar con cargas
variables, es importante que se pruebe la estabilidad sobre todasvariables, es importante que se pruebe la estabilidad sobre todas
las condiciones de carga.las condiciones de carga.

7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 41/45
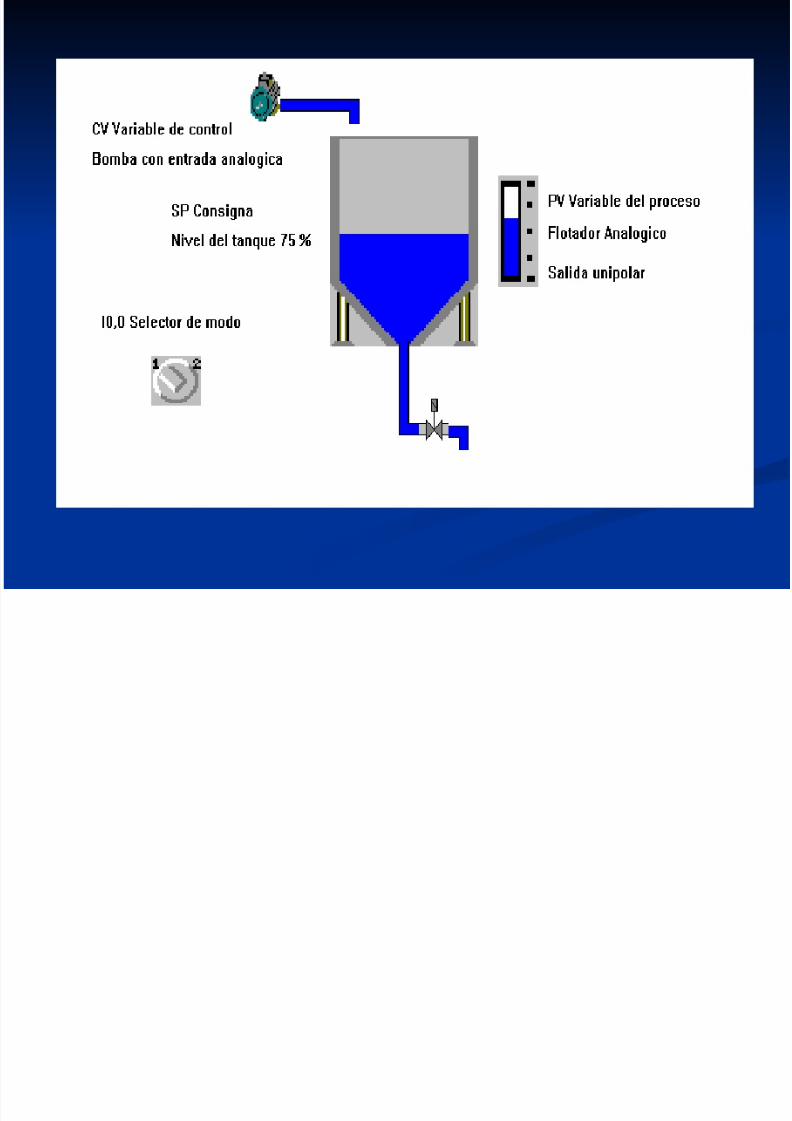
)jemlo PID)jemlo PID En este e)emplo se utiliza un dep#sito para mantener una presi#nEn este e)emplo se utiliza un dep#sito para mantener una presi#n
de agua constante. Para ello se toma continuamente agua delde agua constante. Para ello se toma continuamente agua deldep#sito en una cantidad variable. 0na bomba de velocidaddep#sito en una cantidad variable. 0na bomba de velocidad variable se utiliza para añadir agua al dep#sito con un caudal apto variable se utiliza para añadir agua al dep#sito con un caudal aptopara mantener una presi#n adecuada del agua y evitar así /ue separa mantener una presi#n adecuada del agua y evitar así /ue se vacíe. vacíe.
$a consigna de este sistema es el nivel de agua1 en este caso, un$a consigna de este sistema es el nivel de agua1 en este caso, un valor e/uivalente al 234 de llenado. $a variable del proceso la valor e/uivalente al 234 de llenado. $a variable del proceso la
suministra un sensor 5otador /ue señaliza el nivel de llenado delsuministra un sensor 5otador /ue señaliza el nivel de llenado deldep#sito1 e/uivale a 6 4 cuando está vacío y a 766 4 cuando estádep#sito1 e/uivale a 6 4 cuando está vacío y a 766 4 cuando estácompletamente lleno. $a salida es una señal /ue permite controlarcompletamente lleno. $a salida es una señal /ue permite controlarla velocidad de la bomba, del 6 al 766 4 de su velocidad má8ima.la velocidad de la bomba, del 6 al 766 4 de su velocidad má8ima.
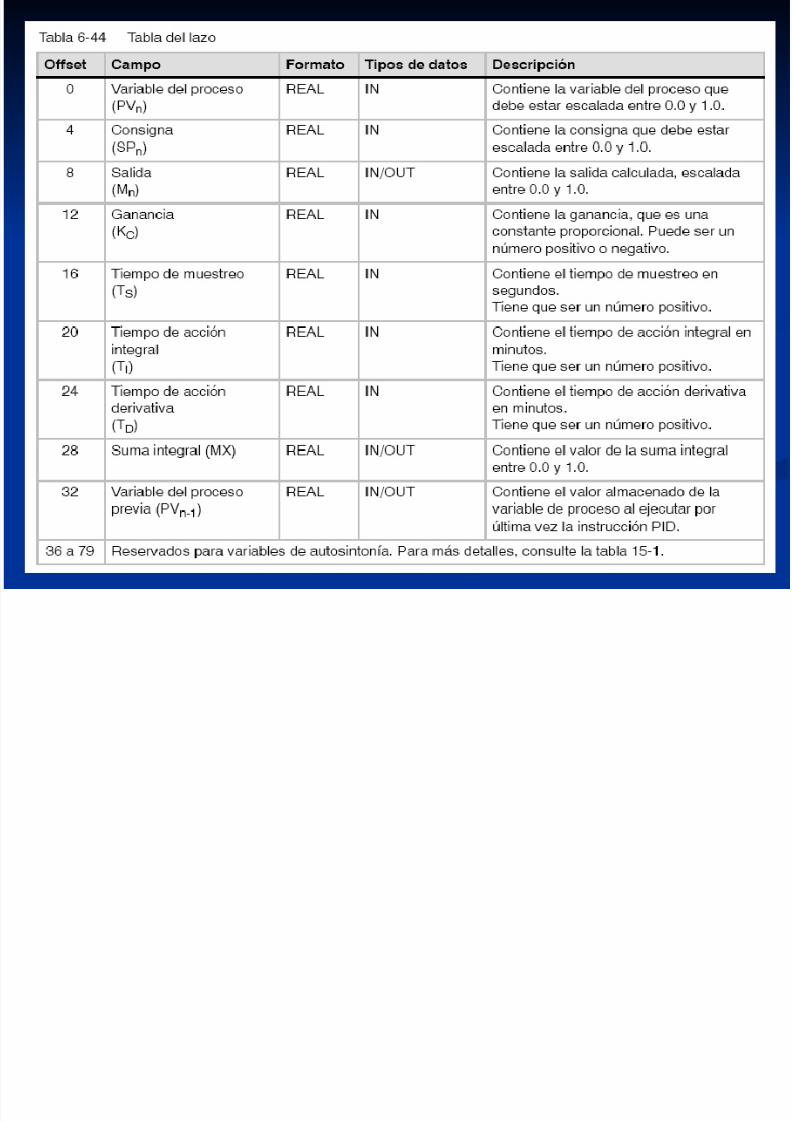
$a consigna está predeterminada y se introduce directamente en$a consigna está predeterminada y se introduce directamente enla tabla del lazo. El sensor 5otador suministra la variable della tabla del lazo. El sensor 5otador suministra la variable delproceso /ue es un valor anal#gico unipolar. $a salida del lazo seproceso /ue es un valor anal#gico unipolar. $a salida del lazo se
escribe en una salida anal#gica unipolar utilizada para controlar laescribe en una salida anal#gica unipolar utilizada para controlar la velocidad de la bomba. El alcance tanto de la entrada como de la velocidad de la bomba. El alcance tanto de la entrada como de lasalida anal#gica es de 9:.666.salida anal#gica es de 9:.666.
En este e)emplo s#lo se utiliza acci#n proporcional e integral. $aEn este e)emplo s#lo se utiliza acci#n proporcional e integral. $aganancia del lazo y las constantes de tiempo se ;an determinadoganancia del lazo y las constantes de tiempo se ;an determinadodurante cálculos de ingeniería y se a)ustan para obtener unadurante cálculos de ingeniería y se a)ustan para obtener unaregulaci#n #ptima. $os valores calculados de las constantes deregulaci#n #ptima. $os valores calculados de las constantes de
tiempo se indican a continuaci#n-tiempo se indican a continuaci#n-

7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 42/45
<c = 6.:> ?s = 6.7 seg ?i=96min<c = 6.:> ?s = 6.7 seg ?i=96min $a velocidad de la bomba se controlará de$a velocidad de la bomba se controlará de
orma manual ;asta /ue el dep#sito est&orma manual ;asta /ue el dep#sito est&lleno al 23 4. Despu&s se abre la válvula paralleno al 23 4. Despu&s se abre la válvula parasacar agua del mismo. Simultáneamente, lasacar agua del mismo. Simultáneamente, labomba cambia de modo manual a automático.bomba cambia de modo manual a automático.$a entrada digital se utiliza para conmutar de$a entrada digital se utiliza para conmutar demodo manual a automático. Esta entrada semodo manual a automático. Esta entrada sedescribe a continuaci#n-describe a continuaci#n-
I6.6 es control manual@automático1 6 =I6.6 es control manual@automático1 6 =manual, 7 = automático.manual, 7 = automático.
En modo manual, el operador a)usta laEn modo manual, el operador a)usta la velocidad de la bomba en AD76B mediante un velocidad de la bomba en AD76B mediante un valor real /ue puede estar comprendido valor real /ue puede estar comprendidoentre 6.6 y 7.6.entre 6.6 y 7.6.
7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 43/45
7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 44/45
7/17/2019 Expo02 El Pid
http://slidepdf.com/reader/full/expo02-el-pid 45/45
FINFIN
(no continuara(no continuara))


















