Robotica - Edinsoncs - Ockangplc-automatas cinematica(automatizacion y robotica)
Upload
jeisson-davidCategory
view
18download
0
ROBOTICA INDUSTRIAL
JEISSON D. SASTOQUE
Generación de trayectorias para tele operación de robots
manipuladores por modelo cinemática
RESUMEN
Los brazos mecánicos, también conocidos como robots manipuladores, son utilizados en diversas áreas tales como: la industria automotriz, metalurgia, medicina, entre otras; donde desempeñan tareas de corte, soladura, pintura, ensamble, etcétera. Entre los principales problemas que se presentan en la operación de los robots manipuladores, está el determinar las trayectorias que deben seguir cada una de sus articulaciones para realizar una tarea específica
RESUMEN
Por lo regular tales trayectorias son descritas por expresiones matemáticas continuas con respecto al tiempo, las cuales deben ser calculadas y programadas previamente en el sistema de control correspondiente. Este procedimiento resulta complicado y tedioso sobre todo en aplicaciones donde el robot debe realizar movimientos muy elaborados.
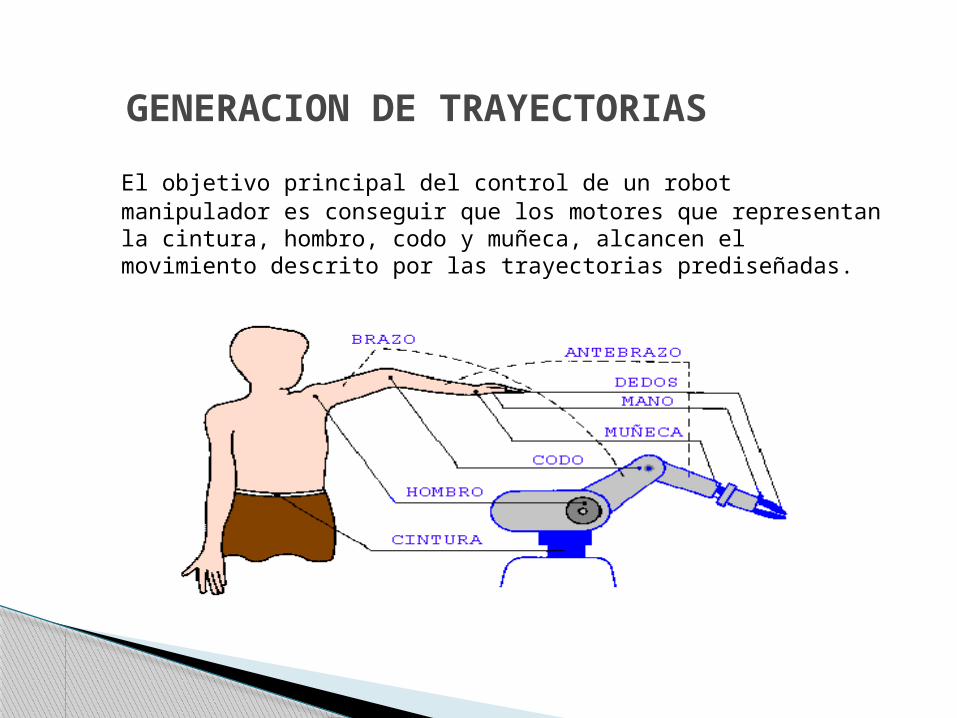
El objetivo principal del control de un robot manipulador es conseguir que los motores que representan la cintura, hombro, codo y muñeca, alcancen el movimiento descrito por las trayectorias prediseñadas.
GENERACION DE TRAYECTORIAS
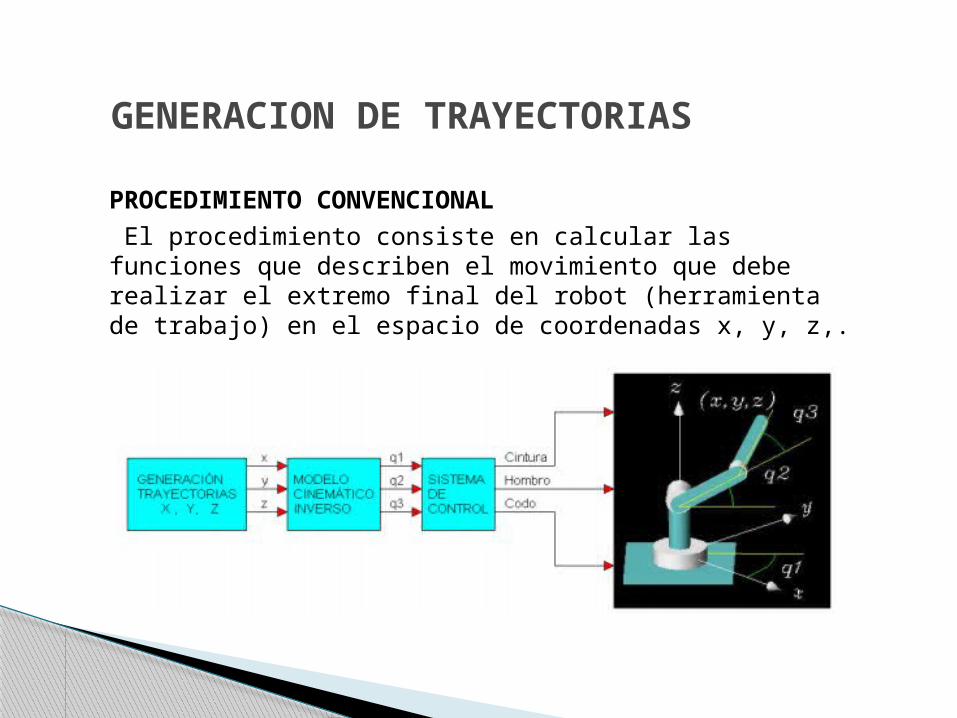
PROCEDIMIENTO CONVENCIONAL
El procedimiento consiste en calcular las funciones que describen el movimiento que debe realizar el extremo final del robot (herramienta de trabajo) en el espacio de coordenadas x, y, z,.
GENERACION DE TRAYECTORIAS
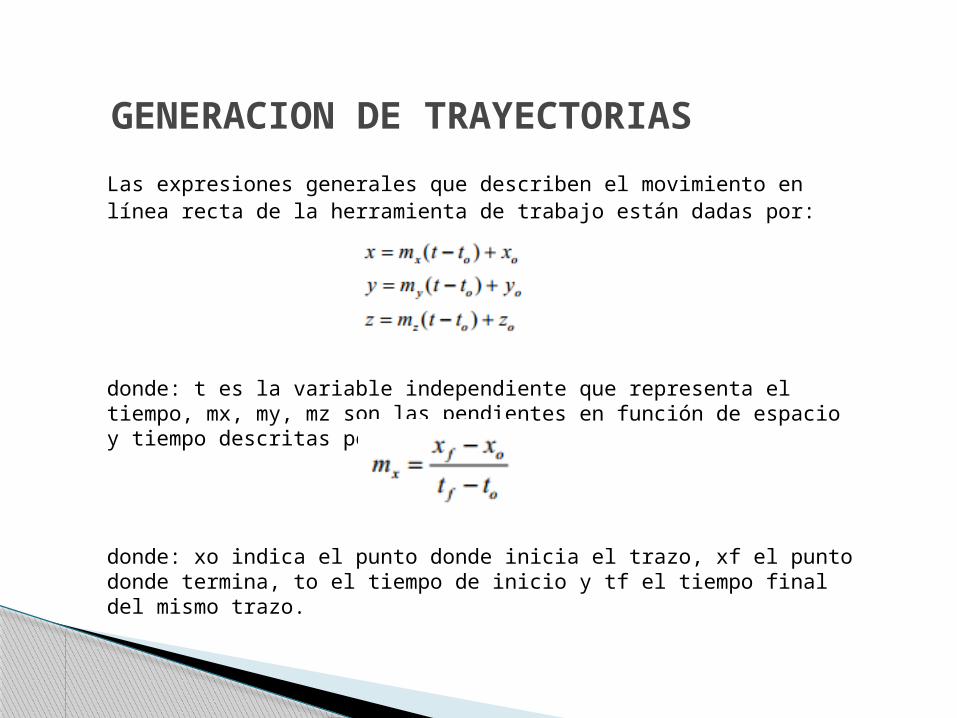
Las expresiones generales que describen el movimiento en línea recta de la herramienta de trabajo están dadas por:
donde: t es la variable independiente que representa el tiempo, mx, my, mz son las pendientes en función de espacio y tiempo descritas por:
donde: xo indica el punto donde inicia el trazo, xf el punto donde termina, to el tiempo de inicio y tf el tiempo final del mismo trazo.
GENERACION DE TRAYECTORIAS
GENERACION DE TRAYECTORIAS
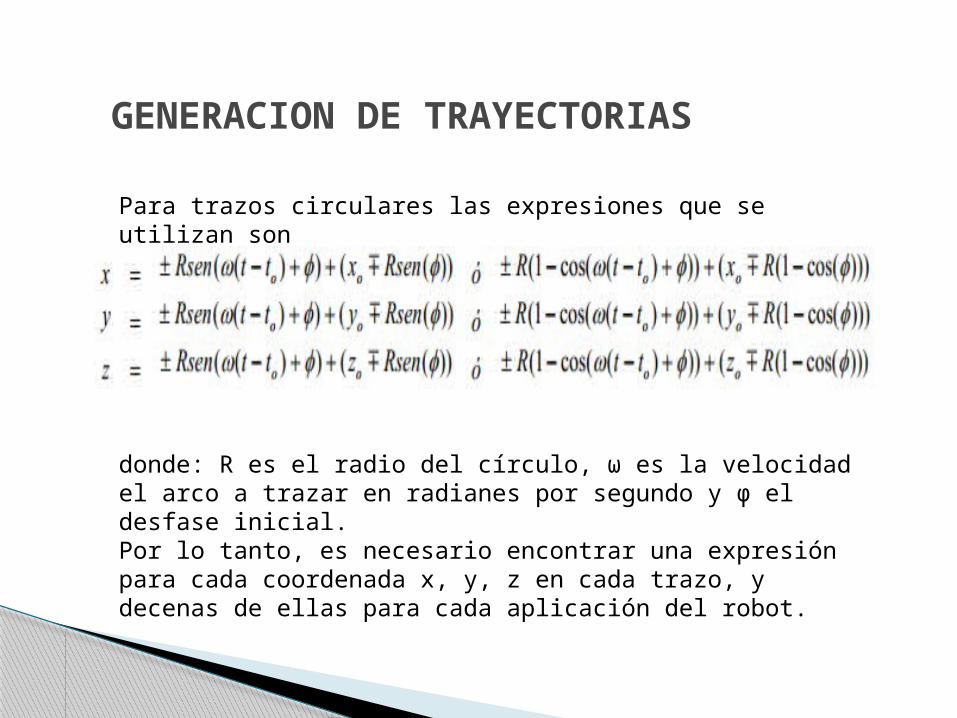
Para trazos circulares las expresiones que se utilizan son
donde: R es el radio del círculo, ω es la velocidad el arco a trazar en radianes por segundo y φ el desfase inicial. Por lo tanto, es necesario encontrar una expresión para cada coordenada x, y, z en cada trazo, y decenas de ellas para cada aplicación del robot.
GENERACION DE TRAYECTORIAS
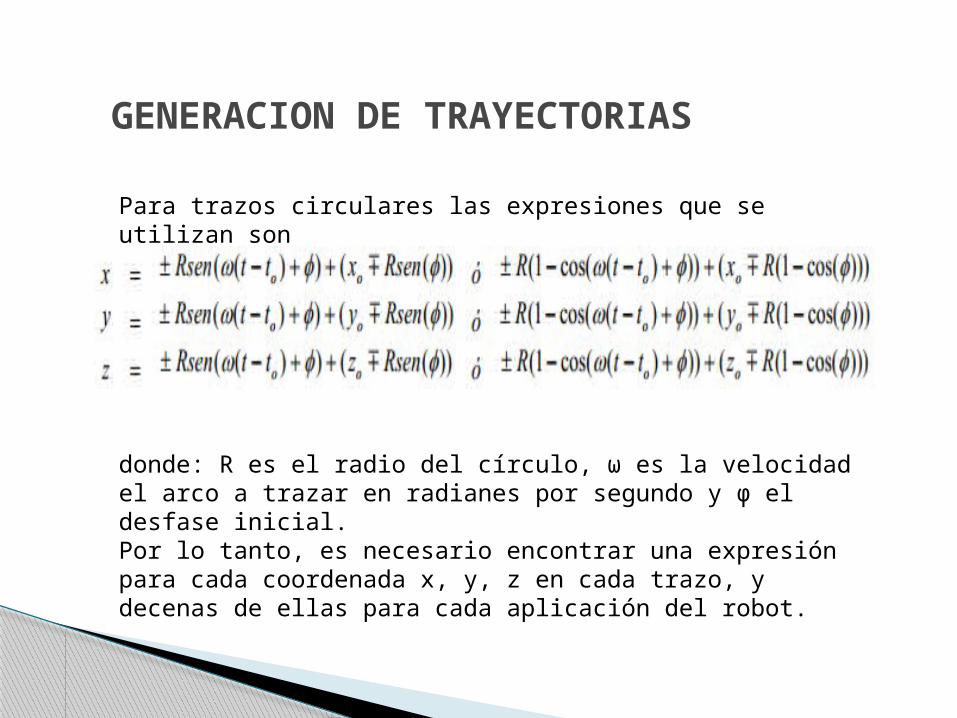
Para trazos circulares las expresiones que se utilizan son
donde: R es el radio del círculo, ω es la velocidad el arco a trazar en radianes por segundo y φ el desfase inicial. Por lo tanto, es necesario encontrar una expresión para cada coordenada x, y, z en cada trazo, y decenas de ellas para cada aplicación del robot.
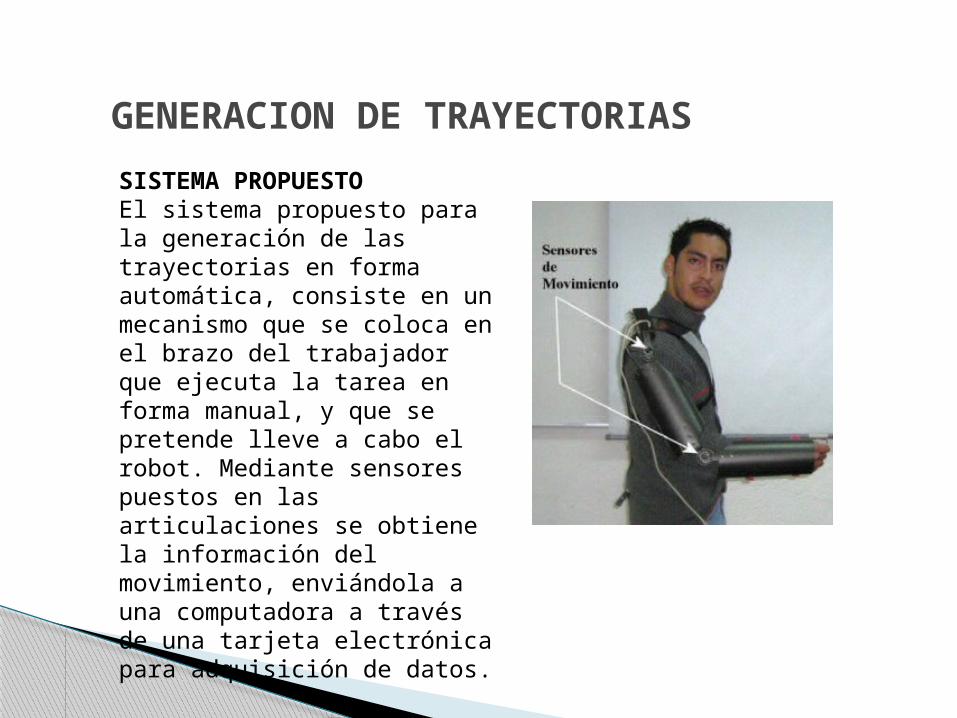
GENERACION DE TRAYECTORIASSISTEMA PROPUESTOEl sistema propuesto para la generación de las trayectorias en forma automática, consiste en un mecanismo que se coloca en el brazo del trabajador que ejecuta la tarea en forma manual, y que se pretende lleve a cabo el robot. Mediante sensores puestos en las articulaciones se obtiene la información del movimiento, enviándola a una computadora a través de una tarjeta electrónica para adquisición de datos.
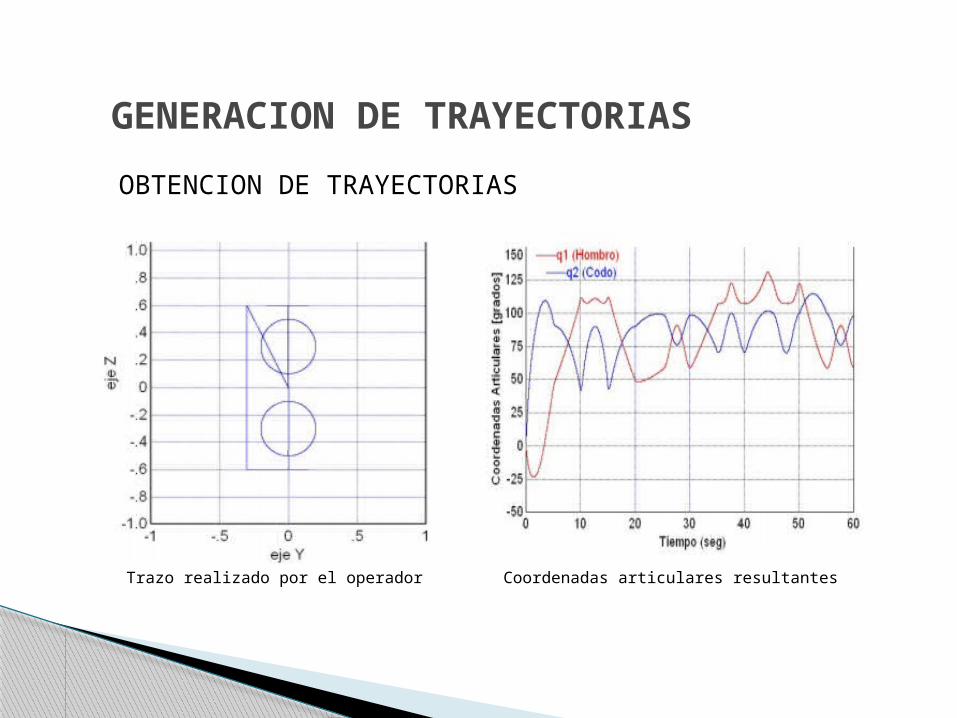
GENERACION DE TRAYECTORIASOBTENCION DE TRAYECTORIAS
Trazo realizado por el operador Coordenadas articulares resultantes
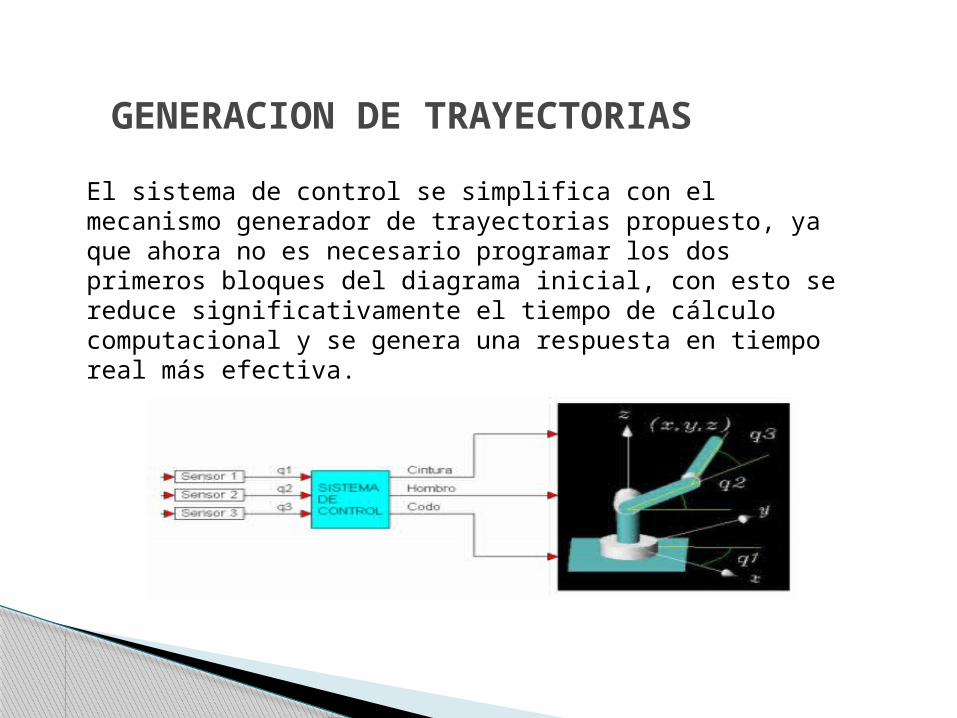
El sistema de control se simplifica con el mecanismo generador de trayectorias propuesto, ya que ahora no es necesario programar los dos primeros bloques del diagrama inicial, con esto se reduce significativamente el tiempo de cálculo computacional y se genera una respuesta en tiempo real más efectiva.
GENERACION DE TRAYECTORIAS
RESULTADOS
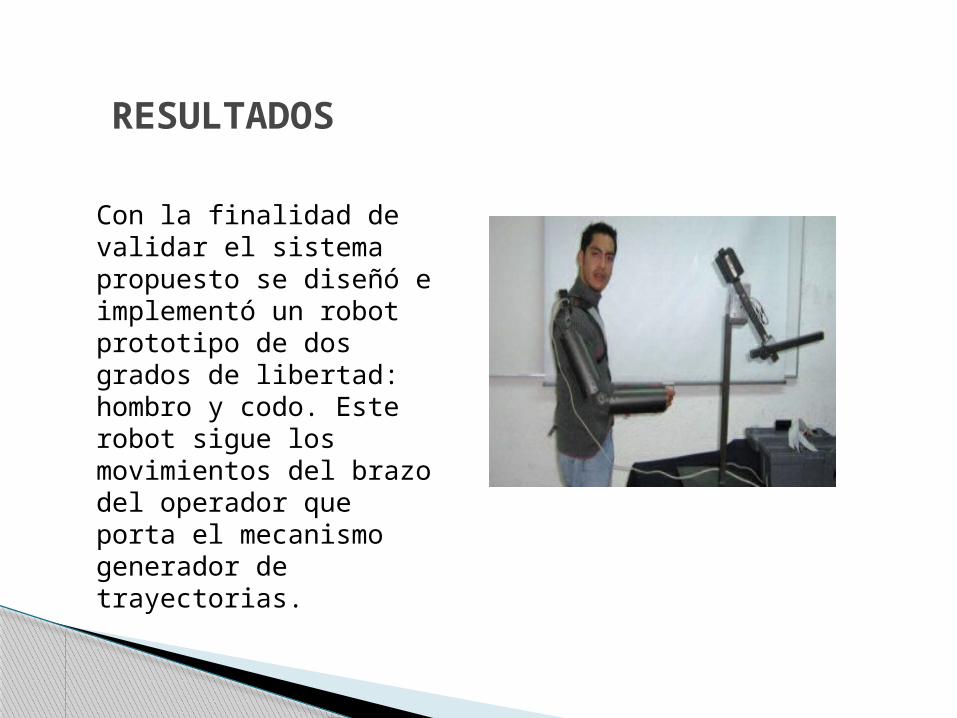
Con la finalidad de validar el sistema propuesto se diseñó e implementó un robot prototipo de dos grados de libertad: hombro y codo. Este robot sigue los movimientos del brazo del operador que porta el mecanismo generador de trayectorias.
RESULTADOS
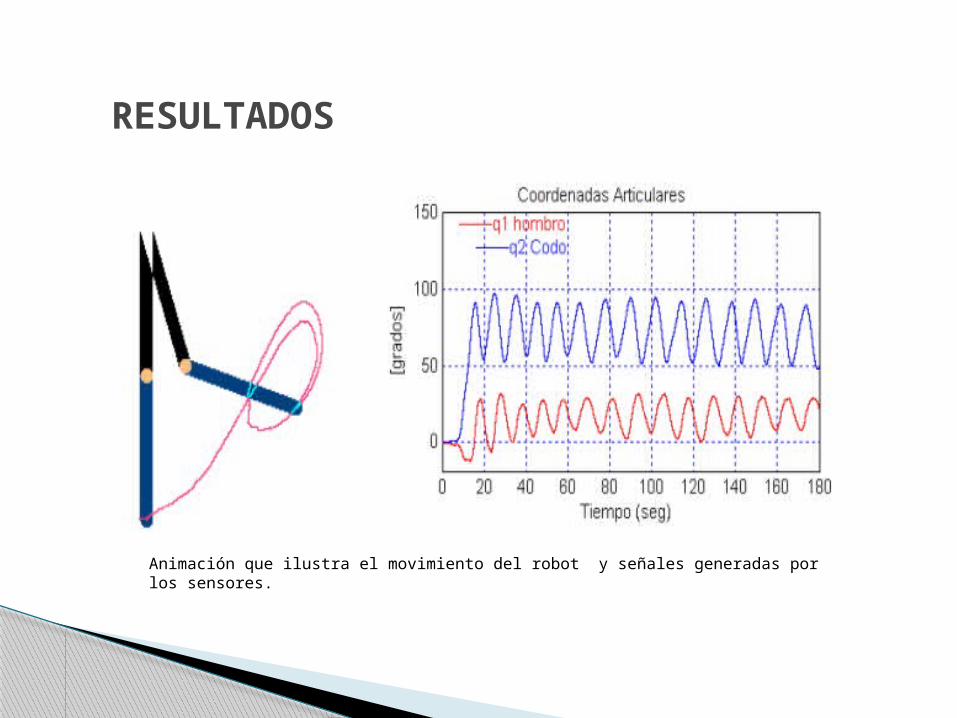
Animación que ilustra el movimiento del robot y señales generadas por los sensores.
CONCLUSIONESCon el sistema conformado por el mecanismo generador de trayectorias es posible operar el robot manipulador a distancia, con el fin de ser implementado en escenarios como:
Seguimiento en tiempo real del movimiento del operador para realizar tareas bajo condiciones de riesgo. De esta forma el operador puede guiar los movimientos desde un lugar seguro, mientras que el robot las reproduce en el área de trabajo cortando, soldando, manejando material radioactivo o sustancias químicas.
Reproducción de forma repetitiva de movimientos previamente capturados en memoria para aplicaciones en una línea de producción continua.
Material didáctico que ilustra los resultados para control de movimiento mediante el modelo cinemático.
GRACIAS!!