FANUC Robot i series 万能知能ロボット-282 万能知能ロボット FANUC Robot i series...
1
-282 万能知能ロボット FANUC Robot i series 543830 ファナック㈱ 圧 ・ 圧 ・ シ ス テ ム ・ ロ ボ ッ ト ・ F A ・ ・ ・ ・ ・ ・ ・ 運 ポ プ ・ ・ ・ FANUC Robot iシリーズは、各種知能化機能を搭載した高性能ロボットコントローラR-J3iBにより制御される高信頼性 インテリジェントロボットです。 知能化 知能化 「見る」、 「感じる」能力を持ったロボッ トは、熟練者そのままの動きを実現し ます。 ネットワーク化 ネットワーク機能は、生産現場の統合 管理を実現するネットワーク化を促進 します。 ロボット化 ロボットの高いフレキシビリティは、 多様な作業の自動化に貢献します。 立体センサー /バラ積み部品取出し機能 立体センサを用いて、整列さ れていない部品のハンドリン グが可能です。部品を整列さ せる作業や、専用の部品供給 機や整列用パレットが不要と なり、低コストの自動化シス テムを構築することができま す。 力センサ/機械部品 精密嵌合機能 力センサを用いて、機械部品 の精密嵌合作業を行うことが できます。部品の単純な挿入 だけでなく、部品に位相があ る場合、部品をまわしながら 位相を合わせて挿入すること も可能です。熟練の必要な作 業の自動化が可能となります。 高感度衝突検出機能 ロボットのアームやハンドが 周辺物と干渉すると、これを 瞬時に検知して緊急停止しま す。干渉によるロボットや ワークの破損を防ぎ、生産の 速やかな復旧を可能とします。 特別なハンド保護装置も不要 となります。干渉からの自動 復旧も可能です。 ロボットリンク同期動作機能 ネットワークで繋がれた複数 のロボットを、あたかも1台の ロボットのように協調して動 作させることができます。重 量物や大きな形状のワークを、 複数のロボットで把持して搬 送することができ、専用の搬 送機が不要となります。 直交ソフトフロート機能 ロボットが周囲からの力を検 知し、その力に応じて作業を行 うことができます。特殊なハン ドやセンサは必要ありません。 例えば、ダイキャストマシンか らワークを取出す時に、エジェ クタで押出されるワークを柔 らかく受け取ることができま す。 軌跡一定機能 オーバライドを変えても、 コーナでのロボットの動作軌 跡が変わりません。動作軌跡 を低オーバライドで確認した ら、すぐにオーバライド100% でプログラムを実行できます。 プログラムの教示確認時間を 大幅に短縮し、ワークの種類 変更に短時間で対応できます。 高精度負荷推定機能 高精度絶対位置機能 ロボットの知能化を100%実現するには、ハンドやワークの重量 等の正確なデータが必要です。従来は、測定や計算が必要でし たが、ロボットが自分でハンドやワークのデータを正確に推定で きるようになり、煩わしい測定や計算が不要となりました。 アーム長やアームたわみの補正によって、ロボットの絶対 位置制度をさらに高めました。オフラインで作成したプロ グラムが、最小限の修正で使用できるようになります。
Transcript of FANUC Robot i series 万能知能ロボット-282 万能知能ロボット FANUC Robot i series...
�-282
万能知能ロボットFANUC Robot i series
543830
ファナック㈱
空圧・油圧・真空
直動システム・関連
ロボット・FA
制御・検出・計測
駆動・回転
軸受・素材・機械
動力伝達・伝動
搬送・運搬
ポンプ・送風機・粉体
工場設備・環境
�
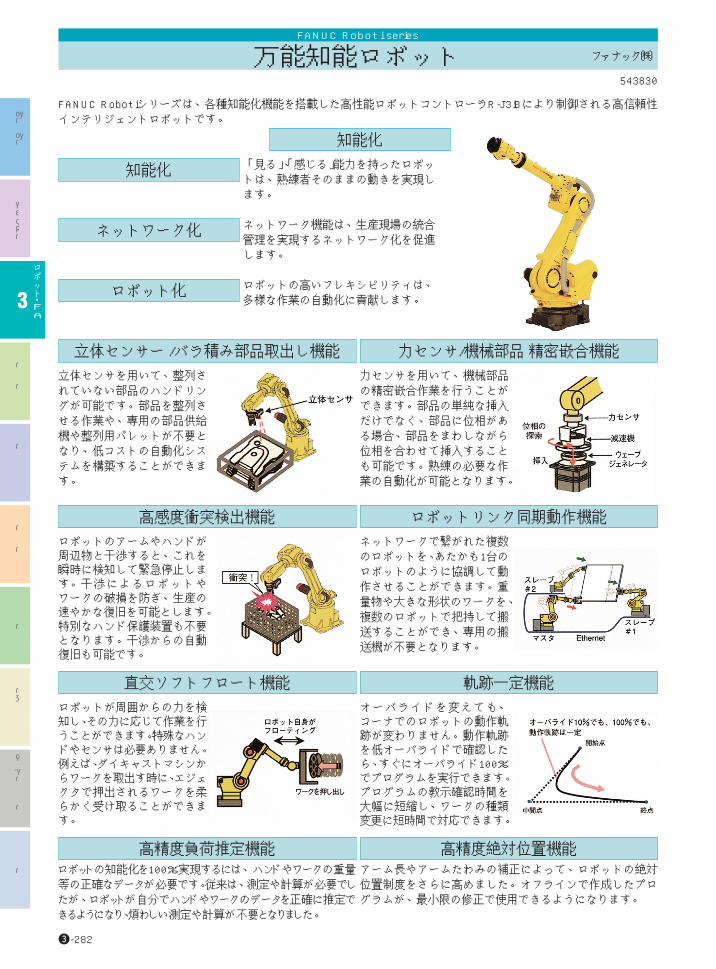
FANUC Robot iシリーズは、各種知能化機能を搭載した高性能ロボットコントローラR-J3iBにより制御される高信頼性インテリジェントロボットです。
知能化
知能化
「見る」、「感じる」能力を持ったロボットは、熟練者そのままの動きを実現します。
ネットワーク化 ネットワーク機能は、生産現場の統合管理を実現するネットワーク化を促進します。
ロボット化 ロボットの高いフレキシビリティは、多様な作業の自動化に貢献します。
立体センサー /バラ積み部品取出し機能
立体センサを用いて、整列されていない部品のハンドリングが可能です。部品を整列させる作業や、専用の部品供給機や整列用パレットが不要となり、低コストの自動化システムを構築することができます。
力センサ/機械部品 精密嵌合機能
力センサを用いて、機械部品の精密嵌合作業を行うことができます。部品の単純な挿入だけでなく、部品に位相がある場合、部品をまわしながら位相を合わせて挿入することも可能です。熟練の必要な作業の自動化が可能となります。
高感度衝突検出機能
ロボットのアームやハンドが周辺物と干渉すると、これを瞬時に検知して緊急停止します。干渉によるロボットやワークの破損を防ぎ、生産の速やかな復旧を可能とします。特別なハンド保護装置も不要となります。干渉からの自動復旧も可能です。
ロボットリンク同期動作機能
ネットワークで繋がれた複数のロボットを、あたかも1台のロボットのように協調して動作させることができます。重量物や大きな形状のワークを、複数のロボットで把持して搬送することができ、専用の搬送機が不要となります。
直交ソフトフロート機能
ロボットが周囲からの力を検知し、その力に応じて作業を行うことができます。特殊なハンドやセンサは必要ありません。例えば、ダイキャストマシンからワークを取出す時に、エジェクタで押出されるワークを柔らかく受け取ることができます。
軌跡一定機能
オーバライドを変えても、コーナでのロボットの動作軌跡が変わりません。動作軌跡を低オーバライドで確認したら、すぐにオーバライド100%でプログラムを実行できます。プログラムの教示確認時間を大幅に短縮し、ワークの種類変更に短時間で対応できます。
高精度負荷推定機能 高精度絶対位置機能ロボットの知能化を100%実現するには、ハンドやワークの重量等の正確なデータが必要です。従来は、測定や計算が必要でしたが、ロボットが自分でハンドやワークのデータを正確に推定できるようになり、煩わしい測定や計算が不要となりました。
アーム長やアームたわみの補正によって、ロボットの絶対位置制度をさらに高めました。オフラインで作成したプログラムが、最小限の修正で使用できるようになります。