Feria MovilForum 2004, 1 de Diciembre, Madrid Dr....
21
COMMBOTS: Robótica + M2M Feria MovilForum 2004, 1 de Diciembre, Madrid Dr. Diego López de Ipiña, Iñaki Vázquez, Jonathan Ruiz de Garibay y David Sainz {dipina, ivazquez}@eside.deusto.es, {joruiz, dsainz}@tecnologico.deusto.es Facultad de Ingeniería (ESIDE), Universidad de Deusto Cátedra de Telefónica Móviles Universidad de Deusto . . . . . . . . .
Transcript of Feria MovilForum 2004, 1 de Diciembre, Madrid Dr....
COMMBOTS: Robótica + M2M
Feria MovilForum 2004, 1 de Diciembre, Madrid
Dr. Diego López de Ipiña, Iñaki Vázquez, Jonathan Ruiz de Garibay y David Sainz{dipina, ivazquez}@eside.deusto.es, {joruiz, dsainz}@tecnologico.deusto.es
Facultad de Ingeniería (ESIDE), Universidad de Deusto
Cátedra de Telefónica Móviles Universidad de Deusto. . . . . . . . .

López de Ipiña et al. COMMBOTS: Robótica + M2M
Universidad de DeustoUniversidad de Deusto. . . . . . . . .
Feria MovilForum 2004
Cátedra de Telefónica Móviles Universidad de Deusto. . . . . . . . .
Contenidos
• Concepto COMMBOTS• MicroBótica y Comunicación M2M• Arquitectura COMMBOTS• Los Microbots• MicroBots Proxy• Estaciones de Control COMMBOTS • Optimizaciones y Análisis de Tiempos• Conclusiones
López de Ipiña et al. COMMBOTS: Robótica + M2M
Universidad de DeustoUniversidad de Deusto. . . . . . . . .
Feria MovilForum 2004
Cátedra de Telefónica Móviles Universidad de Deusto. . . . . . . . .
COMMBOTS
COMMBOTS pretende crear una planta de experimentación de robots/microbots dotados de capacidades de comunicación móvil y localización por GPS
– Indirectamente quiere demostrar que el control remoto de un microbot en tiempo-real vía GPRS es factible

López de Ipiña et al. COMMBOTS: Robótica + M2M
Universidad de DeustoUniversidad de Deusto. . . . . . . . .
Feria MovilForum 2004
Cátedra de Telefónica Móviles Universidad de Deusto. . . . . . . . .
Robótica
• La Robótica se aplica principalmente:– En el campo industrial– Últimamente, en el entorno doméstico.
• Independientemente de su uso, tanto los robots industriales o domésticos actuales proporcionan capacidades de comunicación muy primitivas y poco flexibles.
López de Ipiña et al. COMMBOTS: Robótica + M2M
Universidad de DeustoUniversidad de Deusto. . . . . . . . .
Feria MovilForum 2004
Cátedra de Telefónica Móviles Universidad de Deusto. . . . . . . . .
Comunicación M2M• En los últimos años, los sistemas de comunicaciones móviles
han emergido como unos mecanismos fiables para la comunicaciones máquina a máquina (M2M)
• Por ejemplo:– Conjunto de dispositivos móviles que controlan el tráfico en una
ciudad y comunican esa información a los semáforos para que actúen en consecuencia a la situación actual del tráfico.
• Algunos usos de M2M son:– Telemetría– Recolección de datos– Control remoto– Robótica– Mantenimiento y seguridad– Logística – Telemedicina.

López de Ipiña et al. COMMBOTS: Robótica + M2M
Universidad de DeustoUniversidad de Deusto. . . . . . . . .
Feria MovilForum 2004
Cátedra de Telefónica Móviles Universidad de Deusto. . . . . . . . .
Concepto COMMBOTS
López de Ipiña et al. COMMBOTS: Robótica + M2M
Universidad de DeustoUniversidad de Deusto. . . . . . . . .
Feria MovilForum 2004
Cátedra de Telefónica Móviles Universidad de Deusto. . . . . . . . .
Arquitectura COMMBOTS
• El sistema COMMBOTS presenta una arquitectura cliente/servidor/cliente orientada a facilitar la comunicación end-to-end entre puestos de control y microbots.
• Consta de tres componentes principales:– Los microbots– El Microbots proxy– Las estaciones de control.

López de Ipiña et al. COMMBOTS: Robótica + M2M
Universidad de DeustoUniversidad de Deusto. . . . . . . . .
Feria MovilForum 2004
Cátedra de Telefónica Móviles Universidad de Deusto. . . . . . . . .
Arquitectura COMMBOTS

López de Ipiña et al. COMMBOTS: Robótica + M2M
Universidad de DeustoUniversidad de Deusto. . . . . . . . .
Feria MovilForum 2004
Cátedra de Telefónica Móviles Universidad de Deusto. . . . . . . . .
MicroBot de COMMBOTS

López de Ipiña et al. COMMBOTS: Robótica + M2M
Universidad de DeustoUniversidad de Deusto. . . . . . . . .
Feria MovilForum 2004
Cátedra de Telefónica Móviles Universidad de Deusto. . . . . . . . .
MicroBot de COMMBOTS• Cada microbot (siguiendo la analogía del cuerpo humano)
consta de:– Piernas y brazos: Ruedas motrices que le proporcionan movilidad, y
estructuras que permiten mover una cámara para abarcar un campo de visión mayor, o actuar sobre el entorno, recoger muestras, iluminarlo.
– Sentidos: Sensores que le permiten capturar información de su entorno, como por ejemplo, sensores de luminosidad y temperatura, o una cámara digital.
– Cuerpo: Le proporciona peso, estabilidad, permite mantener fijos el resto de los elementos, y añadir fácilmente componentes adiciones.
– Cerebro: Uno o varios sistemas con capacidad de procesamiento que se encargan de controlar los motores, testear los sensores ocomunicarse con otros microbots de su entorno.
• Se compone de dos entidades que trabajan de forma coordinada: (1) un microcontrolador PIC16F873 y una unidad telemática owa22A
– Se comunican mediante un protocolo diseñado para tal efecto,basado en mensajes de 1 o 2 bytes de longitud, que utiliza los puertos RS-232 de ambas entidades.

López de Ipiña et al. COMMBOTS: Robótica + M2M
Universidad de DeustoUniversidad de Deusto. . . . . . . . .
Feria MovilForum 2004
Cátedra de Telefónica Móviles Universidad de Deusto. . . . . . . . .
Módulo OWA22A• Las tareas con gran demanda computacional las realiza el módulo
owa22A (CPU ARM7 de 60MIPS y 2 MB RAM ) de OWASYS (http://www.owasys.com/es/BOK_100_1003_R2B.pdf):– La comunicación entre el microbot y el microbots proxy– Control de la cámara digital (CMUCAM2 - http://www-2.cs.cmu.edu/
~cmucam/cmucam2/), recogiendo las imágenes y tratándolas para su posterior envío.
• El módulo owa22A, dispone de un sistema operativo Linux y provee para su programación en C/C++, APIs para: – Comunicación GSM e IO (Input/Output)– Comunicación TCP/IP (iNet), – GPS o – RS-232.
• El owa22A es capaz de procesar las imágenes que le llegan desde la cámara digital y servir de puente entre el microcontrolador y el resto del sistema de forma eficiente. – Se podría haber creado un servidor WAP embebido en el módulo
• Dicha funcionalidad se ha centralizado en un único MicroBots Proxy.• Se solventa el problema de IP no públicas otorgadas a móviles en redes GPRS

López de Ipiña et al. COMMBOTS: Robótica + M2M
Universidad de DeustoUniversidad de Deusto. . . . . . . . .
Feria MovilForum 2004
Cátedra de Telefónica Móviles Universidad de Deusto. . . . . . . . .
PIC16F873• El PIC16F873 de MICROCHIP
(http://ww1.microchip.com/downloads/en/DeviceDoc/ 30292c.pdf), realiza tareas sencillas que retrasarían innecesariamente al módulo owa22A:– Ejecución de comandos de control sobre motores/ruedas del
microbot– Control de sensores/actuadores integrados en el mismo.
• Ha proporcionado:– Gran flexibilidad en los sensores/actuadores a incluir en el
microbot– Toma de decisiones rápida y eficiente para situaciones
donde el tiempo de respuesta es prioritario– Permitido implementar un modelo de control en tiempo real
del estado del microbot, informando al microbots proxy de cualquier cambio en el mismo
López de Ipiña et al. COMMBOTS: Robótica + M2M
Universidad de DeustoUniversidad de Deusto. . . . . . . . .
Feria MovilForum 2004
Cátedra de Telefónica Móviles Universidad de Deusto. . . . . . . . .
MicroBots Proxy• Componente software central de la arquitectura COMMBOTS:
– Evita que el módulo GPRS de un módulo esté permanentemente conectado a la red, y escuchando activamente a peticiones.
– Permite que un MicroBot sea accesible, incluso cuando la dirección IP que se le asigna es una NAT (Network-Address-Translation)
– Previene el bloqueo de conexiones por parte de los cortafuegos del operador al puerto 80 de un móvil
– Factoriza la funcionalidad común tanto a las estaciones de control móviles y estáticas:
• A través de una caché evita comunicaciones redundantes con los microbots remotos.
– Snapshots del estado actual del microbot. • Tolerancia a fallos en las comunicaciones con los microbots
– De manera transparente a las estaciones de control reinicia comunicaciones entre él mismo y los microbots.

López de Ipiña et al. COMMBOTS: Robótica + M2M
Universidad de DeustoUniversidad de Deusto. . . . . . . . .
Feria MovilForum 2004
Cátedra de Telefónica Móviles Universidad de Deusto. . . . . . . . .
MicroBots Proxy• Entre un módulo telemático y el proxy se establecen tres conexiones:
– Conexión para la recepción y envío de respuestas a comandos del protocolo MP (MicroBot Protocol).
– Conexión para PUSH de imágenes capturadas. – Conexión para PUSH de alertas.
• Notificación para asegurarse que el microbots proxy siempre mantiene una copia actual del estado de un microbot (temperatura, luminosidad, estado batería)
• Mecanismos para limitar apertura innecesaria de conexión GPRS por parte de los microbots:– Mensajes de texto de control, que activan/desactivan y parametrizan la
conexión abierta por el MicroBot. – Llamada perdida correspondiente al número de teléfono asignado al
proxy, obliga a conectarse/desconectarse al microbots proxy• Servicios web disponibles en web de la Cátedra de Telefónica Móviles
España (CTME) en la UD:– http://www.ctme.deusto.es/enviarSMS/enviosms.asmx
López de Ipiña et al. COMMBOTS: Robótica + M2M
Universidad de DeustoUniversidad de Deusto. . . . . . . . .
Feria MovilForum 2004
Cátedra de Telefónica Móviles Universidad de Deusto. . . . . . . . .
Puestos de Control COMMBOTS
• Los puestos de control envían comandos de control/monitorización al microbots proxy que siempre que sea necesario los delega a los microbots pertinentes:– Estaciones de control Web/WAP– Estaciones de control móviles

López de Ipiña et al. COMMBOTS: Robótica + M2M
Universidad de DeustoUniversidad de Deusto. . . . . . . . .
Feria MovilForum 2004
Cátedra de Telefónica Móviles Universidad de Deusto. . . . . . . . .
Estaciones de Control Web/WAP• Usan HTTP/WSP para emitir
comandos, y reciben respuestas en XHTML o WML
• Interfaz web generada por componente web del MicroBots Proxy, usando Mobile Web Controls de ASP.NET– Dado que el Pocket PC acepta
HTML comprimido (emite cabecera Accept-Encoding: gzip, deflate), se le sirve el contenido comprimido para reducir volumen de datos vía GPRS

López de Ipiña et al. COMMBOTS: Robótica + M2M
Universidad de DeustoUniversidad de Deusto. . . . . . . . .
Feria MovilForum 2004
Cátedra de Telefónica Móviles Universidad de Deusto. . . . . . . . .
Estaciones de Control Móviles
• Usan sockets TCP para transmitir en binario comandos del protocolo MP– Estación de control para
PocketPC implementada mediante Compact.NET
– Estación de control para móviles Java con MIDP 1.0

López de Ipiña et al. COMMBOTS: Robótica + M2M
Universidad de DeustoUniversidad de Deusto. . . . . . . . .
Feria MovilForum 2004
Cátedra de Telefónica Móviles Universidad de Deusto. . . . . . . . .
Optimizaciones
• Para permitir el control en tiempo real vía GPRS, se han realizado las siguientes optimizaciones:– Caché en MicroBots Proxy evita comunicaciones
innecesarias con MicroBots, evita un salto extra– Transmisión de imágenes de MicroBot a Proxy vía
UDP y cacheo de última imagen recibida de cada MicroBot en MicroBots Proxy
– Compresión de XHTML enviado de proxy a navegador Pocket PC
López de Ipiña et al. COMMBOTS: Robótica + M2M
Universidad de DeustoUniversidad de Deusto. . . . . . . . .
Feria MovilForum 2004
Cátedra de Telefónica Móviles Universidad de Deusto. . . . . . . . .
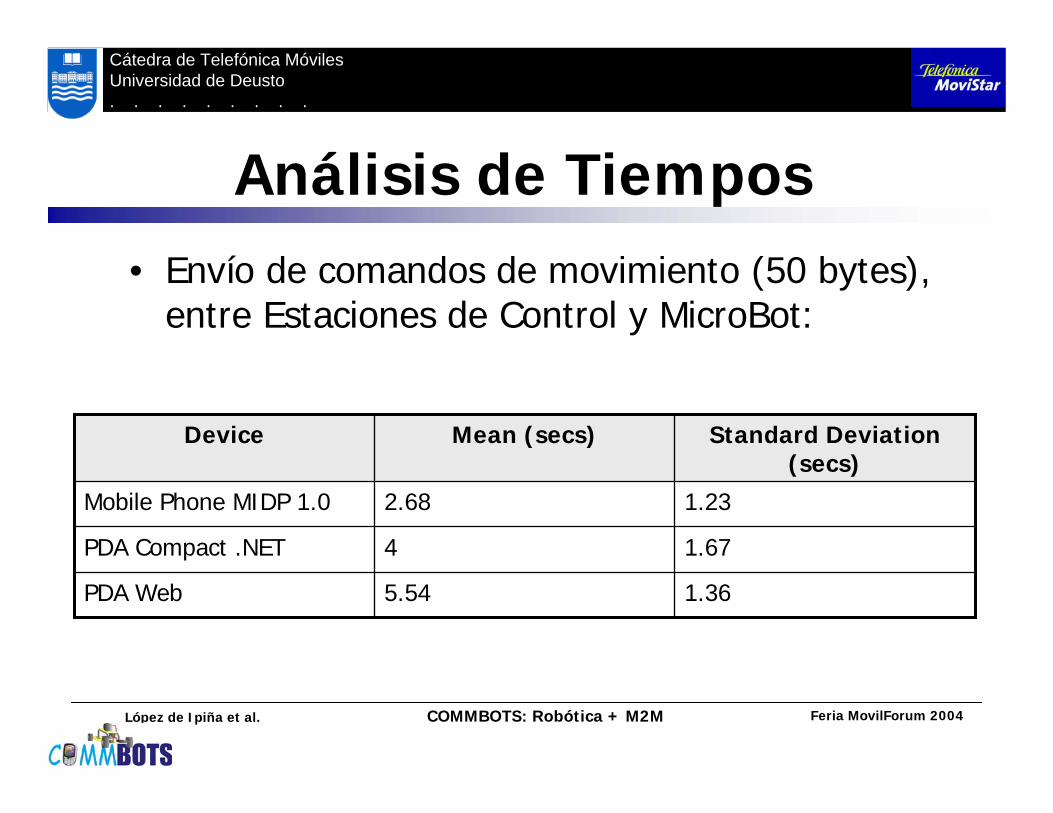
Análisis de Tiempos• Envío de comandos de movimiento (50 bytes),
entre Estaciones de Control y MicroBot:
1.365.54PDA Web
1.674PDA Compact .NET
1.232.68Mobile Phone MIDP 1.0
Standard Deviation(secs)
Mean (secs)Device
López de Ipiña et al. COMMBOTS: Robótica + M2M
Universidad de DeustoUniversidad de Deusto. . . . . . . . .
Feria MovilForum 2004
Cátedra de Telefónica Móviles Universidad de Deusto. . . . . . . . .
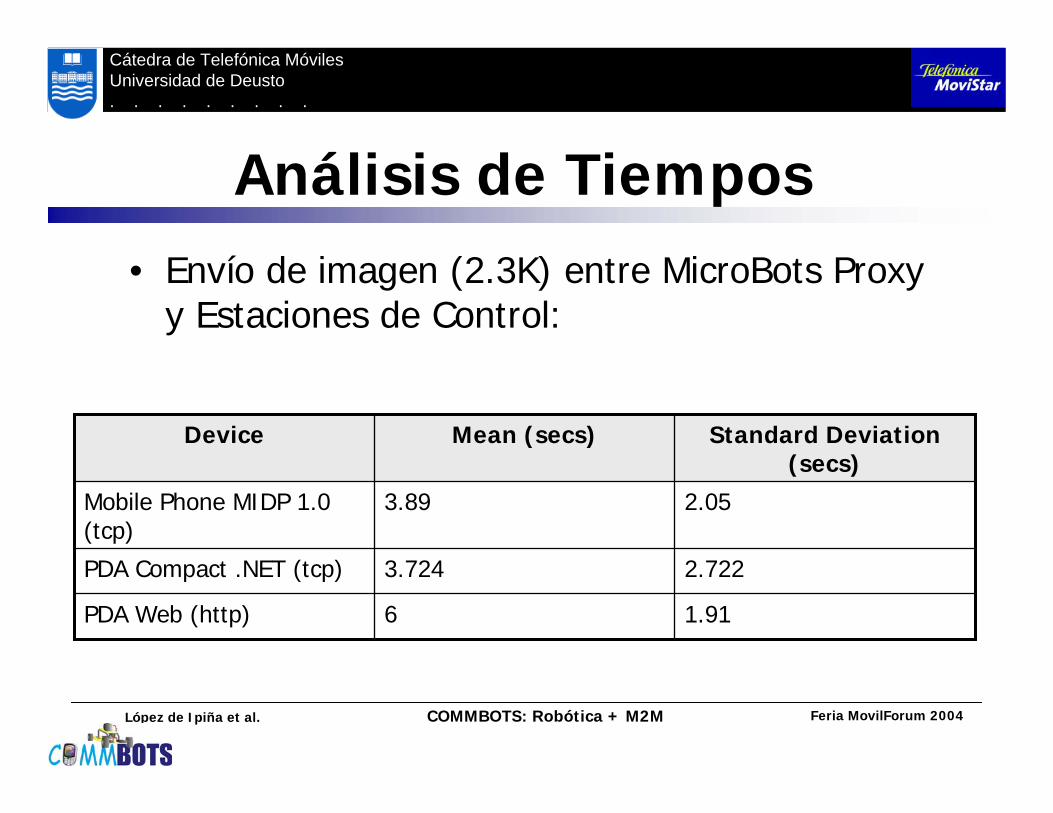
Análisis de Tiempos• Envío de imagen (2.3K) entre MicroBots Proxy
y Estaciones de Control:
1.916PDA Web (http)
2.7223.724PDA Compact .NET (tcp)
2.053.89Mobile Phone MIDP 1.0 (tcp)
Standard Deviation(secs)
Mean (secs)Device
López de Ipiña et al. COMMBOTS: Robótica + M2M
Universidad de DeustoUniversidad de Deusto. . . . . . . . .
Feria MovilForum 2004
Cátedra de Telefónica Móviles Universidad de Deusto. . . . . . . . .
Conclusión• COMMBOTS demuestra el potencial que ofrece la combinación
de la microbótica y la comunicación M2M– Pretendemos trasladar nuestras experiencias a entornos
industriales– Base para futuros proyectos que pretendan utilizar microbots u otra
maquinaria coordinada desde una estación central mediante comunicación móvil:
• Los resultados obtenidos nos han indicado que:– El control vía web desde un móvil con GPRS no es viable cuando se
requiere actuación en tiempo real. – Sin embargo, el diseño de un protocolo adaptado a las demandas
particulares de un entorno wireless, más las optimizaciones y caches del componente proxy intermedio permiten:
• El control remoto en tiempo real vía GPRS desde estaciones de control propietarias (MIDP o Compact.NET).
• Más información en: http://www.ctme.deusto.es/COMMBOTS