FísicaII - UNLPmatera/fisicaii/2019/pdf/clase... · 2019-05-16 · Bibliografía I...
24
Física II Primer Semestre 2019 Grupo 29 I Profesor: Juan Mauricio Matera I JTP: A designar I Ayudantes: I Pablo Rosito I Fátima Velásquez Rojas I Nahuel Díaz
Transcript of FísicaII - UNLPmatera/fisicaii/2019/pdf/clase... · 2019-05-16 · Bibliografía I...

Física II
Primer Semestre 2019
Grupo 29
I Profesor: Juan Mauricio MateraI JTP: A designarI Ayudantes:
I Pablo RositoI Fátima Velásquez RojasI Nahuel Díaz
http://www.ing.unlp.edu.ar/catedras/F0305/

Física II
Primer Semestre 2019
Grupo 29
I Profesor: Juan Mauricio MateraI JTP: A designarI Ayudantes:
I Pablo RositoI Fátima Velásquez RojasI Nahuel Díaz
http://www.ing.unlp.edu.ar/catedras/F0305/

Bibliografía
I Resnik, Halliday, Krane, Física para estudiantes de Ciencias eIngenierías , vol 2
I Alonso, Finn, Física, vol 2I Serway, FísicaI Sears, Zemansky, Young, Física UniversitariaI Tipler, FísicaI Kip, Fundamentos de Electricidad y MagnetismoI Eisberg, Física Fundamental y aplicacionesI Feynmann, Lecciones de Física, vol 2
Importante: los apuntes de la cátedra no remplazan de ningunamanera a los libros de texto de esta bibliografía.

Bibliografía
I Resnik, Halliday, Krane, Física para estudiantes de Ciencias eIngenierías , vol 2
I Alonso, Finn, Física, vol 2I Serway, FísicaI Sears, Zemansky, Young, Física UniversitariaI Tipler, FísicaI Kip, Fundamentos de Electricidad y MagnetismoI Eisberg, Física Fundamental y aplicacionesI Feynmann, Lecciones de Física, vol 2
Importante: los apuntes de la cátedra no remplazan de ningunamanera a los libros de texto de esta bibliografía.

Condiciones de cursada y Aprobación
I 2 exámenes parciales, con una instancia de recuperación cadauno + 1 instancia “flotante”
I Calificación: 0 - 100 ptsI trabajos prácticos (debe rendir final): 40-59pts en cada módulo.I desaprobado: 0-39pts en cualquiera de los módulos.I promoción: 60 - 100 pts. La nota final será el promedio de las
notas de ambos módulos.
I Realización de las experiencias de laboratorio.
I Materias correlativasI Matemática BI Física I
Temas del cursoI Electrostática y magnetostática.I Electrodinámica.I Óptica y fotometría.
Temas de otras asignaturas necesarios para seguir las clasesI Magnitudes escalares y vectoriales (curso de ingreso,
Matemática A, Física I).I Leyes de Newton. Conceptos de Energía y Cantidad de
movimiento (Física I).I Movimiento ondulatorio (Física I).I Funciones trigonométricas (Matemática A).I Cálculo de límites, derivadas e integrales en una variable
(Matemática A y B).I Integrales de linea, curvas y volúmenes (Matemática B).I Teoremas integrales: Green, Gauss y Stockes (Matemática B).

Cronograma de Exámenes

Módulo I
Evaluación Módulo I 26/04Consulta 03/05Consulta y muestra deexámenes
08/05
Recuperatorio 10/05
Módulo II
Evaluación Módulo II 03/07Consulta 05/07Consulta y muestra deexámenes
10/07
Consulta 12/07Recuperatorio 17/07

Flotantes Módulos I y II
Evaluación Flotante Módulos I y II 09/08

Material Adicional - Videos de la cátedraIr a la carpeta de google drive

Sitio web del curso (G29)Ir a la carpeta de google drive
Sistema Internacional de Pesos y medidasUnidades básicas (válido hasta el 20 de mayo de 2019)I Metro (m) (distancias)I Kilogramo (kg) (masa)I Segundo (s) (tiempo)I Ampère (A) (corriente eléctrica)I Kelvin (K ) (temperatura)I Mol (mol) (cantidad de substancia)I Candela (Cd) (Intensidad Luminosa)
Unidades derivadas (ej)I Metro2 (m2)(área)I Metro3 (m3) (volumen)I Newton ([N] = kgms−2) (fuerza)I Joule ([N][m] = kgm2s−2) (energía)I Pascal (N/m2) (Presión)I kg m−3 (Densidad volumétrica de masa)
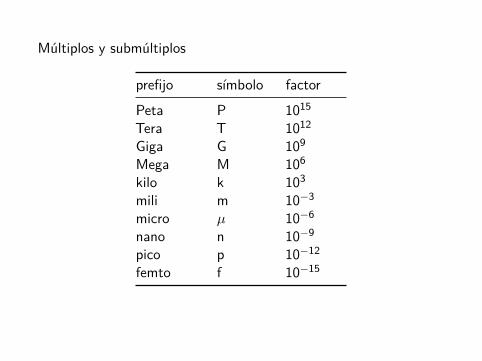
Múltiplos y submúltiplos
prefijo símbolo factor
Peta P 1015
Tera T 1012
Giga G 109
Mega M 106
kilo k 103
mili m 10−3
micro µ 10−6
nano n 10−9
pico p 10−12
femto f 10−15

Clases de cantidadesI Escalares (distancias, ángulos, temperatura, presión)
I Un único número real.I Independientes de las coordenadas.
I Vectores (Posición relativa, velocidad, aceleración, fuerzas)I Definidos por su magnitud, dirección y sentido.I ternas de números reales que dependen de las coordenadas.
I Tensores (Inercia, esfuerzos, etc)I conjuntos más complicados de números reales (ej, matrices).I dependen de las coordenadas.I No los vamos a utilizar en el curso.

VectoresI Dado un sistema de coordenadas cartesianas,~v = x i + y j + zk = (x , y , z)
I Magnitud (módulo) |~v | =√
x2 + y2 + z2
I Dirección y sentido: v = ~v|~v |
I Producto por un escalar:
a~v = ax i + ay j + azk = (ax , ay , az)

Suma de vectores en componentes
En 2D~A = ax ux + ay uy y ~B = bx ux + by uy~A + ~B = (ax + bx )ux + (ay + by )uy
|~A + ~B| =√
(ax + bx )2 + (ay + by )2
=√|~A|2 + 2|~A||~B| cos(θ) + |~B|2
En 3D~A = ax ux + ay uy + az uz y~B = bx ux + by uy + bz uz~A+~B = (ax +bx )ux +(ay +by )uy +(az +bz)uz

Producto escalarI Definimos el producto escalar~v1 · ~v2 = x1x2 + y1y2 + z1z2 = |~v1||~v2| cos(θ12)
I El ángulo entre dos versores v , w viene dado porθ = arccos(v · w).
I El producto escalar con un versor e da la proyección delvector ~v en la dirección de e

Producto vectorialI Dados dos vectores ~v1 y ~v2, definimos el producto vectorial
como~w = ~v1 × ~v2
de manera que - ~w ⊥ ~v1, ~v2- |~w | = |~v1||~v2|| sin(θ)|- El sentido está definido por la regla dela mano derecha o regla deltirabuzón * Aplicaciones: torques,elementos de área, torbellinos, etc

Producto vectorialI Dados dos vectores ~v1 y ~v2, definimos el producto vectorial
como~w = ~v1 × ~v2
de manera que - ~w ⊥ ~v1, ~v2- |~w | = |~v1||~v2|| sin(θ)|- El sentido está definido por la regla dela mano derecha o regla deltirabuzón * Aplicaciones: torques,elementos de área, torbellinos, etc

Curvas, superficies e integralesI Una curva es una función de C : R→ R3. Ej:
I segmento: C(t) = t(~r2 −~r1) +~r1I semirecta: C(t) = ~r/tI Circunferencia: C(t) = r(cos(t), sin(t), 0) + (x0, y0, z0)
I Describimos superficies como funciones S : R2 → R3 de dosparámetros:I Paralelogramo: S(u, v) = u~v1 + v~v2 +~r0I Cilindro: S(θ, z) = (r cos(θ), r sin(θ), z) + (x0, y0, z0)I Esfera:S(θ, φ) = (r cos(φ) sin(θ), r sin(φ) sin(θ), r cos(θ)) + (x0, y0, z0)
I Para integrar un campo vectorial sobre una curva(circulación), escribimos∫
C~V (s) · d~s =
∫~V (s) · dC
dt dt
I Para integrar un campo vectorial sobre una superficie (flujo),escribimos∫
S~V (s) · d~A =
∫ ∫~V (~r(u, v)) · d~r
du ×d~rdv dudv
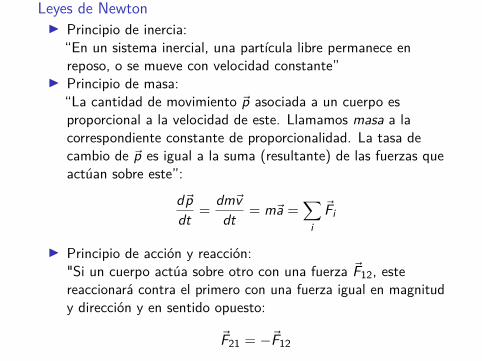
Leyes de NewtonI Principio de inercia:
“En un sistema inercial, una partícula libre permanece enreposo, o se mueve con velocidad constante”
I Principio de masa:“La cantidad de movimiento ~p asociada a un cuerpo esproporcional a la velocidad de este. Llamamos masa a lacorrespondiente constante de proporcionalidad. La tasa decambio de ~p es igual a la suma (resultante) de las fuerzas queactúan sobre este”:
d~pdt = dm~v
dt = m~a =∑
i
~Fi
I Principio de acción y reacción:"Si un cuerpo actúa sobre otro con una fuerza ~F12, estereaccionará contra el primero con una fuerza igual en magnitudy dirección y en sentido opuesto:
~F21 = −~F12
.

Teorema de Trabajo y energíaDe la segunda ley de Newton se sigue el Teorema de trabajo yenergía:
I Si para cierta fuerza F , W =∫ ~x2~x1~F · d~s = U(~x1)− U(~x2)
decimos que F es una Fuerza conservativa y U(~x) es suenergía potencial asociada. En tal caso,Emec = Ec +
∑(cons)i Ui (~x) es la energía mecánica del
sistema.I luego,
∆Emec = Wno conservativo