Funciones submodulares y matrices en el estudio de los...
89
Funciones submodulares y matrices en el estudio de los espacios topol´ogicos finitos Julian Leonardo Cuevas Rozo Universidad Nacional de Colombia Facultad de Ciencias Departamento de Matem´aticas Bogot´ a D.C., Colombia 2016
Transcript of Funciones submodulares y matrices en el estudio de los...
Funciones submodulares y matrices en elestudio de los espacios topologicos finitos
Julian Leonardo Cuevas Rozo
Universidad Nacional de Colombia
Facultad de Ciencias
Departamento de Matematicas
Bogota D.C., Colombia
2016

Funciones submodulares y matrices en elestudio de los espacios topologicos finitos
Julian Leonardo Cuevas Rozo
Trabajo Final de Maestrıa presentado como requisito parcialpara obtener el grado de
Magıster en Ciencias - Matematicas
Director:Profesor Humberto Sarria Zapata
Universidad Nacional de Colombia
Facultad de Ciencias
Departamento de Matematicas
Bogota D.C., Colombia
2016


A quienes invaden cadapagina de este trabajo


Resumen
Se realiza un estudio detallado de la conexion entre las matrices topogeneas, definidaspor Shiraki [10], y los espacios topologicos finitos. Ası mismo, se introducen las matricesde Stong y las matrices asociadas a funciones submodulares, claves en la caracteriza-cion de propiedades topologicas. A partir de estas matrices, se muestran algoritmos quepermiten encontrar componentes conexas, beat points, weak points, la caracterıstica deEuler-Poincare y el core de un espacio finito, ademas de encontrar una caracterizaciondel grupo fundamental de homotopıa usando las entradas de las matrices topogeneasy una propuesta para el calculo de los operadores de borde del complejo singular delespacio X (K), con coeficientes en F2 = {0, 1}, donde K es un complejo simplicial finitoarbitrario.
Palabras clave: Espacios topologicos finitos, posets, funciones submodulares, matri-ces topogeneas, tipos de homotopıa, homologıa singular.
Abstract
A detailed study of the conexion between topogenous matrices, defined by Shiraki[10], and finite topological spaces is done. Likewise, Stong matrices and matrices asso-ciated to submodular functions, key in the characterization of topological properties, areintroduced. From these matrices, algorithms are shown to find connected components,beat points, weak points, the Euler-Poincare characteristic and the core of a finite spa-ce. Also a characterization of the fundamental group in finite spaces and a proposal tocalculate the boundary operators associated to the singular complex of the space X (K),with coefficient group F2 = {0, 1}, where K is an arbitrary finite simplicial complex, arepresented.
Key words: Finite topological spaces, posets, submodular functions, topogenous ma-trices, homotopy types, singular homology.

Indice general
Introduccion V
1. Preliminares 11.1. Conjuntos parcialmente ordenados: posets . . . . . . . . . . . . . . . . . 11.2. Matrices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.3. Espacios topologicos finitos . . . . . . . . . . . . . . . . . . . . . . . . . . 51.4. Funciones submodulares y FD-relaciones . . . . . . . . . . . . . . . . . . 9
2. Matrices asociadas a un espacio finito 152.1. Matriz topogenea . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.2. Triangularizacion de matrices topogeneas . . . . . . . . . . . . . . . . . . 18
2.2.1. Recorriendo Top(X) . . . . . . . . . . . . . . . . . . . . . . . . . 232.2.2. Topologıa heredada . . . . . . . . . . . . . . . . . . . . . . . . . . 262.2.3. Componentes arco-conexas . . . . . . . . . . . . . . . . . . . . . . 272.2.4. Espacio producto y suma ordinal . . . . . . . . . . . . . . . . . . 302.2.5. Funcion de entropıa . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.3. Matrices UX y DX . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 352.4. Matriz de Stong . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 392.5. Matrices NT y NS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3. Topologıa algebraica 513.1. Metodos de reduccion puntual . . . . . . . . . . . . . . . . . . . . . . . . 513.2. Modelos minimales finitos . . . . . . . . . . . . . . . . . . . . . . . . . . 563.3. Caracterıstica de Euler-Poincare . . . . . . . . . . . . . . . . . . . . . . . 593.4. Grupo fundamental . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 623.5. Conexion con complejos simpliciales . . . . . . . . . . . . . . . . . . . . . 68
Conclusiones y recomendaciones 75
Bibliografıa 79
Introduccion
El estudio de los espacios topologicos finitos ha venido creciendo con el tiempo, nosolo por su riqueza intrınseca, sino tambien por la gran cantidad de aplicaciones en loque se denomina hoy dıa como analisis de grandes datos (Big Data). A traves del tiempose han desarrollado herramientas poderosas para el estudio de estos espacios, como loson los posets y las matrices, y en los ultimos anos se han conectado con las funcionessubmodulares, enriqueciendo aun mas los distintos puntos de vista y ampliando el pa-norama para poder manipular la estructura topologica en los conjuntos finitos.
En 1937, Alexandroff demostro que la coleccion de espacios topologicos finitos seencuentra en correspondencia uno a uno con la de los conjuntos preordenados, y que asu vez, aquellos espacios finitos que satisfacen el axioma de separacion T0 correspondena los conjuntos finitos parcialmente ordenados [2]. Esta correspondencia resulta muyvaliosa, por ejemplo, en el estudio de los tipos de homotopıa, puesto que si un espaciofinito no cumple con el axioma T0, existe un espacio mas pequeno, homotopicamenteequivalente al espacio inicial, que sı lo cumple, permitiendo restringir la atencion a losespacios T0 sin alterar las propiedades homotopicas.
Dos conexiones importantes entre los espacios topologicos finitos y las matrices, seencuentran en los trabajos de Stong [11] y de Shiraki [10]. En 1966, Stong demuestra quelos espacios topologicos finitos, salvo homeomorfismo, se encuentran en correspondenciauno a uno con las clases de equivalencia de un cierto tipo de matrices, vıa similaridad pormatrices de permutacion. A su vez, en 1968 Shiraki demuestra que los espacios topologi-cos finitos estan en correspondencia biunıvoca con las matrices topogeneas (topogenousmatrices). Lo anterior muestra que los espacios finitos pueden ser caracterizados por (almenos) dos tipos de matrices, aspecto que sera muy importante en nuestro trabajo.
Finalmente, a partir de los trabajos finales de maestrıa de Julian Abril [1] y Leonar-do Roa [9], se han encontrado vınculos muy interesantes entre los espacios finitos y lasfunciones submodulares, un nuevo enfoque en el estudio topologico de los conjuntos fi-nitos. Estos trabajos han permitido interpretar muchos conceptos del ambito topologicoa traves de valores numericos proporcionados por las funciones submodulares asocia-das, algo realmente importante si queremos mecanizar la verificacion de propiedadestopologicas sobre los espacios finitos.
v

Con el espıritu de enlazar todos los anteriores puntos de vista, pretendemos coneste trabajo mostrar las diferentes interacciones entre los espacios topologicos finitos,los posets, las matrices y las funciones submodulares para comprender los atributos to-pologicos de un espacio y poder encontrar algoritmos para describirlos.
El documento se encuentra organizado de la siguiente manera: en el capıtulo 1,introducimos los conceptos mas relevantes referentes a posets, matrices, funciones sub-modulares y espacios topologicos, junto con su respectiva notacion.
En el capıtulo 2, estudiamos el concepto de matriz topogenea y a partir de el mos-tramos diferentes aplicaciones, como el recorrido por el retıculo Top(X) y algoritmospara encontrar los valores de las funciones submodulares f y rA, definidas en [9]. Asımismo, se introducen las matrices UX , DX y la matriz de Stong de un espacio, ilustrandoalgunas de sus propiedades basicas.
El capıtulo 3 hace uso de las herramientas del capıtulo 2 para encontrar las re-ducciones puntuales de un espacio, es decir, eliminacion de beat points y weak points,logrando obtener, en particular, el core de un espacio a partir de operaciones con lasfilas y columnas de las matrices propuestas. Tambien haremos una descripcion del grupofundamental de homotopıa por medio de lazos que pueden determinarse desde la matriztopogenea y estableceremos una forma de calcular la caracterıstica de Euler-Poincare.Finalmente proponemos encontrar las matrices de representacion de los operadores deborde asociados a un complejo simplicial finito K, que determinan los grupos de ho-mologıa con coeficientes en F2 = {0, 1}, usando la matriz de Stong del espacio X (K)definido por McCord [7].
Los aportes de este trabajo son los siguientes:
Asignar matrices UX y DX a las funciones fU y fD para su manipulacion.
Encontrar algoritmos para calcular los valores de las funciones submodulares f ,rA, fU y fD en cualquier subconjunto de un espacio finito arbitrario.
Identificar los beat points y weak points de un espacio topologico finito, y porconsiguiente, encontrar su core, usando la matriz topogenea y de Stong.
Calcular la caracterıstica de Euler-Poincare para cualquier espacio finito usandolas matrices topogeneas.
Definir el grupo T (X, xm) y encontrar el isomorfismo entre dicha estructura y elgrupo fundamental de homotopıa π1(X, xm).
Encontrar la representacion matricial, con coeficientes en F2 = {0, 1}, de todos losoperadores de borde asociados a un complejo simplicial finito K por medio de lamatriz de Stong del espacio X (K).
vi
Capıtulo 1
Preliminares
En este capıtulo se presenta la notacion que se usara a lo largo del texto, y que servirapara entender los enunciados y las demostraciones de los resultados que mostraremos.
1.1. Conjuntos parcialmente ordenados: posets
Definicion 1.1.1. Sea X un conjunto no vacıo. El conjunto de partes de X es lacoleccion de todos los subconjuntos de X, que denotaremos por 2X . El cardinal deX, representado por el sımbolo |X|, es el numero de elementos del conjunto.
Definicion 1.1.2. Sobre una relacion R ⊆ X×X definimos las siguientes propiedades:
1. Reflexividad. Para todo x ∈ X, se cumple (x, x) ∈ R.
2. Antisimetrıa. Para todo x, y ∈ X, si (x, y) ∈ R y (y, x) ∈ R entonces x = y.
3. Transitividad. Para todo x, y, z ∈ X, si (x, y) ∈ R y (y, z) ∈ R entonces (x, z) ∈ R.
Si la relacion satisface las propiedades de reflexividad y transitividad, decimos quees un preorden sobre X; si R cumple ademas la propiedad de antisimetrıa, decimos quees un orden (parcial) sobre X. En este caso, escribiremos x 6 y en lugar de (x, y) ∈ R,y diremos que el par (X,6) es un conjunto parcialmente ordenado o un poset (por sussiglas en ingles).
Observacion 1.1.3. Todo poset (X,6) puede representarse graficamente mediante undiagrama de la siguiente manera: cada elemento de X es un vertice que se representapor un punto en el plano; dibujamos un segmento de recta que vaya hacia arriba dex a y si x 6 y, y no existe z tal que x < z < y. Dicho segmento se denomina arista,con punto inicial x y punto final y. Ademas, no es necesario considerar bucles pues larelacion x 6 x quedara implıcita para todo x ∈ X. Al diagrama lo denotaremos porH(X), y diremos que es el diagrama de Hasse asociado a X. El conjunto de aristas deH(X) sera representado por E(H(X)).
1

CAPITULO 1. PRELIMINARES 2
Definicion 1.1.4. Sea (X,6) un poset. Un subconjunto C de X es una cadena de melementos, si |C| = m y para todo par de elementos xi, xj ∈ C, se cumple xi 6 xj oxj 6 xi, es decir, C es un subconjunto totalmente ordenado de X
Definicion 1.1.5. Dado un elemento xi ∈ X, definimos su altura como el mayor de loscardinales de las cadenas que tienen a xi como su elemento maximo, y la notaremos porh(xi). El valor h(X) = max {h(xi) : xi ∈ X} es la altura de X.
Ejemplo 1.1.6. Si sobre el conjunto X = {x1, x2, x3, x4, x5} definimos la relacion
℘ ∪ {(x1, x2), (x1, x3), (x1, x4), (x2, x4), (x5, x2), (x5, x4)}
donde ℘ = {(x1, x1), (x2, x2), (x3, x3), (x4, x4), (x5, x5)}, entoncesX, junto con la relaciondefinida, es un poset cuyo diagrama de Hasse es el siguiente:
•x2
•x5
•x4
•x1
•x3
En este caso, h(x1) = h(x5) = 1, h(x2) = h(x3) = 2 y h(X) = h(x4) = 3.
Definicion 1.1.7. Dado un poset (X,6) y un subconjunto M de X, adoptaremos lasiguiente notacion:
M5 = {y ∈ X : x 6 y para todo x ∈M}
M4 = {y ∈ X : y 6 x para todo x ∈M}Los elementos deM5 se denominan cotas superiores de M , y los deM4 se denominan
cotas inferiores de M .
1.2. Matrices
Definicion 1.2.1. Una matriz A de tamano m × n, es un arreglo rectangular de mnnumeros reales dispuestos en m filas y n columnas como sigue
A =
a11 a12 · · · a1j · · · a1n...
.... . .
... · · · ...ai1 ai2 · · · aij · · · ain...
.... . .
... · · · ...am1 am2 · · · amj · · · amn

CAPITULO 1. PRELIMINARES 3
Para indicar el elemento ubicado en la fila i y la columna j del arreglo, usaremos elsımbolo [A]ij. Para hacer referencia a la fila k de la matriz escribiremos [A]k•, mientrasque para denotar la columna k-esima de la matriz usaremos [A]•k.
Si n ∈ Z+, escribiremos In para representar el conjunto {1, 2, . . . , n}. Algunas matri-ces con notacion especial, y que nombraremos en algunas ocasiones, son las siguientes:
La matriz identidad de tamano n × n es In = [aij], donde aij = δ(i, j) para todoi, j ∈ In, con δ(i, j) la funcion delta de Kronecker.
La matriz nula de tamano m× n es Om×n = [bij], donde bij = 0 para todo i ∈ Imy todo j ∈ In. Si m = n escribiremos simplemente On.
La matriz 1m×n = [cij], donde cij = 1 para todo i ∈ Im y todo j ∈ In. Si m = nescribiremos simplemente 1n.
Observacion 1.2.2. La suma de las entradas de una matriz A = [aij] de tamano m× nla denotaremos por
sum(A) :=
m,n∑i,j=1
aij
Definicion 1.2.3. La matriz de permutacion Pσ de tamano n × n asociada a σ ∈ Sn,donde Sn es el conjunto de permutaciones sobre In, es tal que
[Pσ]ij = δ(i, σ(j))
Observacion 1.2.4. P−1σ = Pσ−1 = PT
σ y PσPτ = Pσ◦τ . Ademas, si B = PTσ APσ se cumple
[B]ij = [A]σ(i)σ(j)
Definicion 1.2.5. Dos matrices A y B se dicen similares, si existe una matriz invertibleM tal que A = M−1BM . Si M es ademas una matriz de permutacion, decimos que Ay B son similares vıa una matriz de permutacion.
Definicion 1.2.6. Dadas dos matrices, A de tamano m × n y B de tamano p × q,definimos la suma directa A⊕B como la matriz en bloques de tamano (m+p)× (n+ q)de la siguiente manera:
A⊕B =
[A OO B
]=
a11 · · · a1n 0 · · · 0...
. . ....
.... . .
...am1 · · · amn 0 · · · 00 · · · 0 b11 · · · b1q...
. . ....
.... . .
...0 · · · 0 bp1 · · · bpq

CAPITULO 1. PRELIMINARES 4
Definicion 1.2.7. Dadas dos matrices, A de tamano m × n y B de tamano p × q,definimos el producto de Kronecker A⊗B como la matriz en bloques de tamano mp×nqque satisface:
A⊗B =
a11B · · · a1nB...
. . ....
am1B · · · amnB
El producto de Kronecker es asociativo y distributivo, por derecha y por izquierda,
respecto a la suma de matrices. Ademas, si cada una de las operaciones indicadas estadefinida, se cumple:
(A⊗B)(C ⊗D) = AC ⊗BD
(A⊗B)−1 = A−1 ⊗B−1
(A⊗B)T = AT ⊗BT
Observacion 1.2.8. sum(A⊕B) = sum(A) + sum(B); sum(A⊗B) = sum(A) · sum(B).
Definicion 1.2.9. Dadas dos matrices A,B de tamano m × n, definimos las matricesA ∨B y A ∧B segun las siguientes igualdades:
[A ∨B]ij = max {[A]ij, [B]ij}
[A ∧B]ij = mın {[A]ij, [B]ij}
Observacion 1.2.10. Si dos matrices E,M de tamano m × n satisfacen la condicion[E]ij 6 [M ]ij para todo i ∈ Im, j ∈ In, escribiremos simplemente E 6M . Por ejemplo,
E 6 E ∨M , M 6 E ∨M
E ∧M 6 E , E ∧M 6M
Definicion 1.2.11. Sea R ⊆ X × X una relacion sobre X = {x1, . . . , xn}. Definimosla matriz de incidencia asociada a R, como la matriz M = [mij] tal que mij = 1 si(xi, xj) ∈ R y mij = 0 si (xi, xj) /∈ R.
La matriz de incidencia de la relacion definida en el ejemplo 1.1.6 es1 1 1 1 00 1 0 1 00 0 1 0 00 0 0 1 00 1 0 1 1

CAPITULO 1. PRELIMINARES 5
1.3. Espacios topologicos finitos
Los resultados que se enuncian sin demostracion en esta seccion, pueden ser consul-tados en [3].
Definicion 1.3.1. Un espacio topologico finito es un par (X,T ), donde X es un con-junto finito y T ⊆ 2X es una coleccion que satisface:
1. ∅ ∈ T , X ∈ T .
2. Si U, V ∈ T entonces U ∩ V ∈ T .
3. Si U, V ∈ T entonces U ∪ V ∈ T .
La coleccion T se denomina topologıa sobre X; los elementos de la topologıa sonllamados abiertos del espacio y si un conjunto es el complemento de algun abierto, sedenomina cerrado del espacio.
Usando las leyes de De Morgan para conjuntos, puede probarse que la coleccionde cerrados de un espacio topologico finito (X,T ) es tambien una topologıa sobre X.Dicha topologıa la denotaremos por T op, y al espacio topologico Xop = (X,T op) lollamaremos el espacio opuesto de (X,T ).
Cada espacio topologico finito (X,T ), define un preorden sobre X de la siguientemanera: si para cada y ∈ X denotamos por Uy a la interseccion de todos los abiertosque contienen a y, la relacion 6 definida por
x 6 y ⇐⇒ x ∈ Uy
es reflexiva y transitiva. Esta construccion sera de suma importancia en nuestro trabajo,por lo que retomaremos a ella en el siguiente capıtulo.
Definicion 1.3.2. Dado (X,T ) un espacio topologico, decimos que la coleccion B ⊆ Tes una base para la topologıa T , si para cada E ∈ T y x ∈ E existe B ∈ B tal quex ∈ B y B ⊆ E.
Por otro lado, si X es un conjunto no vacıo, una coleccion arbitraria B ⊆ 2X quecumpla las condiciones:
1. X =⋃B.
2. Dados B1, B2 ∈ B y x ∈ B1 ∩B2, existe B ∈ B tal que x ∈ B y B ⊆ B1 ∩B2.

CAPITULO 1. PRELIMINARES 6
es una base para una unica topologıa sobre X; dicha topologıa es la topologıa generadapor la base B, la denotaremos por 〈B〉 y esta dada de manera explıcita por
〈B〉 = {U ⊆ X : U =⋃K para algun K ⊆ B}.
Esta construccion es de considerable importancia, pues si queremos encontrar lamenor topologıa sobre un conjunto X que tenga entre sus abiertos la coleccion E ⊆ 2X
arbitraria, esta es precisamente T = 〈B〉 donde en este caso
B ={⋂
H : H ⊆ E}
es decir, un abierto de T es una union de intersecciones finitas de elementos en E .
Observacion 1.3.3. Decimos que una topologıa T1 es mas fina que T2, si se cumpleT2 ⊆ T1. La coleccion Top(X) de todas las topologıas definibles sobre X junto con larelacion de inclusion, (Top(X),⊆), es un retıculo completo, esto es, un poset tal que paracada subconjunto existe un supremo y un ınfimo, pues dada una coleccion de topologıas{Ti}i∈I , su ınfimo esta dado por la interseccion de las topologıas y su supremo es latopologıa generada al tomar E =
⋃i∈I Ti en la construccion anterior.
Definicion 1.3.4. Un espacio topologico (X,T ) satisface el axioma de separacion T0
(es un espacio T0), si para cada par de puntos distintos x, y ∈ X existe un abierto E ∈ Ttal que x ∈ E y y /∈ E, o, y ∈ E y x /∈ E. Un espacio se dice que satisface el axioma deseparacion T1 (es un espacio T1), si para cada par de puntos distintos x, y ∈ X existenabiertos E,M ∈ T tales que x ∈ E y y /∈ E, y, y ∈M y x /∈M . Es claro que un espacioT1 es tambien T0.
Definicion 1.3.5. Sean (X,T ) un espacio topologico finito, E ⊆ X y e ∈ X.
1. e es un punto interior de E, si existe U ∈ T tal que {e} ⊆ U ⊆ E. La coleccionde puntos interiores de E es denotada por Int(E), se denomina el interior de E yresulta ser el mayor conjunto abierto contenido en E.
2. e es un punto exterior a E, si existe U ∈ T tal que {e} ⊆ U ⊆ Ec. La coleccionde puntos exteriores de E es denotada por Ext(E) y se denomina el exterior deE. Notese que Ext(E) = Int(Ec).
3. e es un punto frontera de E si, para todo U ∈ T que contenga a e, se cumpleU ∩ E 6= ∅ y U ∩ Ec 6= ∅. La coleccion de puntos frontera de E es denotada porFr(E) y se denomina la frontera de E. Notese que X = Int(E) ∪ Fr(E) ∪ Ext(E).
4. e es un punto adherente a E si, para todo U ∈ T que contenga a e, se cumpleU ∩ E 6= ∅. La coleccion de puntos adherentes de E se denomina clausura de E,la denotamos por E y resulta ser el menor cerrado en X que contiene a E.

CAPITULO 1. PRELIMINARES 7
5. e es un punto de acumulacion de E si, para todo U ∈ T que contenga a e, secumple (U \{e})∩E 6= ∅. La coleccion de puntos de acumulacion de E es denotadapor Ea, y se denomina el derivado de E. Notese que E = E ∪ Ea.
6. e es un punto aislado de E, si existe U ∈ T tal que U ∩ E = {e}. La coleccionde puntos aislados de E es denotada por Ais(E). Notese que E = Ais(E) ∪ Ea yademas Ais(E) ⊆ E.
Definicion 1.3.6. Dado un conjunto X, decimos que c : 2X −→ 2X es un operador declausura si satisface las siguientes propiedades, para todo I, J ⊆ X:
1. Extensividad. I ⊆ c(I).
2. Monotonıa. Si I ⊆ J entonces c(I) ⊆ c(J).
3. Idempotencia. c(c(I)) = c(I).
Por ejemplo, si (X,T ) es un espacio topologico, el operador c : 2X −→ 2X tal quec(I) = I es de clausura. De manera mas general, si c es un operador de clausura queademas satisface las propiedades:
c(∅) = ∅,
c(⋃nk=1 Ik) =
⋃nk=1 c(Ik),
entonces define una unica topologıa T , donde los conjuntos cerrados son los puntos fijosde c, es decir, aquellos subconjuntos I ⊆ X tales que c(I) = I.
Definicion 1.3.7. Dados (X,T ) y (Y,H ) dos espacios topologicos, una aplicacionf : X → Y se dice continua, si f−1(H) ∈ T para todo H ∈ H . Si f es biyectiva ysu inversa es tambien continua, decimos que f es un homeomorfismo y que los espacios(X,T ) y (Y,H ) son homeomorfos.
Proposicion 1.3.8. Una funcion f : X → Y entre espacios topologicos finitos escontinua si, y solo si, para cada par x, y ∈ X, x 6 y implica f(x) 6 f(y) (las funcionescontinuas son precisamente las aplicaciones que respetan el preorden).
Definicion 1.3.9. Una funcion continua α : [0, 1]→ X se dice que es un camino en Xcon punto inicial α(0) y punto final α(1). Un espacio topologico (X,T ) se dice arco-conexo, si para todo par x, y ∈ X existe un camino α con punto inicial en x y puntofinal en y.
Un espacio topologico (X,T ) es conexo, si los unicos conjuntos que son simultanea-mente abiertos y cerrados son ∅ y X. Un espacio orden-conexo es aquel que para cadapar de puntos x, y ∈ X existe una sucesion x = x0, x1, . . . , xn = y tal que xi y xi+1 soncomparables, para todo 0 6 i 6 n− 1.

CAPITULO 1. PRELIMINARES 8
Proposicion 1.3.10. Las propiedades de conexidad, arco-conexidad y orden-conexidaden espacios topologicos finitos son equivalentes.
Definicion 1.3.11. Sean (X,T ) y (Y,H ) dos espacios topologicos, A ⊆ X un sub-conjunto y f, g : X → Y dos funciones continuas. Decimos que f y g son homotopasrelativas a A, si existe una aplicacion continua H : [0, 1] × X → Y tal que para todox ∈ X
H(0, x) = f(x) y H(1, x) = g(x)
y ademas, H(t, x) = f(x) = g(x) para todo x ∈ A, t ∈ [0, 1]. En este caso escribimosf ' g (rel A); cuando A = ∅ escribimos simplemente f ' g.
Definicion 1.3.12. Dos funciones f, g : X → Y entre espacios topologicos finitos soncomparables, si se cumple que f(x) 6 g(x) para todo x ∈ X, o, g(x) 6 f(x) para todox ∈ X.
Proposicion 1.3.13. Sean f, g : X → Y dos aplicaciones continuas entre espaciostopologicos finitos. Si A ⊆ X, f ' g (rel A) si, y solo si, existe una sucesion f =f0, f1, . . . , fn = g tal que fi : X → Y es una funcion continua con fi|A = f |A para todo0 6 i 6 n y ademas, fi y fi+1 son comparables para todo 0 6 i 6 n− 1.
Definicion 1.3.14. Decimos que dos espacios topologicos X, Y tienen el mismo tipo dehomotopıa, o que son homotopicamente equivalentes, si existen funciones f : X → Yy g : Y → X tales que g ◦ f ' idX y f ◦ g ' idY . En este caso escribimos X ' Y ydecimos que f y g son equivalencias homotopicas.
Definicion 1.3.15. Sean X, Y espacios topologicos, A ⊆ X un subconjunto y la inclu-sion iA : A ↪→ X. Decimos que A es un
1. retracto de X, si existe una funcion continua r : X → A tal que r ◦ iA = idA. Laaplicacion r se denomina retraccion.
2. retracto por deformacion de X, si existe una retraccion r tal que iA ◦ r ' idX .
3. retracto por deformacion fuerte de X, si existe una retraccion r tal que iA ◦ r 'idX (rel A).

CAPITULO 1. PRELIMINARES 9
Definicion 1.3.16. Una equivalencia homotopica debil entre dos espacios topologicosX, Y , es una funcion continua f : X → Y que induce isomorfismos entre los grupos dehomotopıa de ambos espacios, es decir, que para todo punto de base x ∈ X se tiene quef∗ : πi(X, x) −→ πi(Y, f(x)) es un isomorfismo de grupos, para todo i > 1, y es unafuncion biyectiva para i = 0.
Decimos que dos espacios topologicos X, Y son debilmente (homotopicamente) equi-valentes, si existe una cadena finita de espacios X = X1, X2, . . . , Xn = Y y equivalenciasdebiles Xi → Xi+1 o Xi+1 → Xi para cada 1 6 i 6 n− 1.
1.4. Funciones submodulares y FD-relaciones
En esta seccion enunciaremos sin demostracion los resultados mas relevantes estu-diados en [9] y [1], respecto a las conexiones existentes entre FD-relaciones, funcionessubmodulares y espacios topologicos finitos.
Definicion 1.4.1. Dado X un conjunto, una funcion f : 2X → R es submodular sisatisface la propiedad de submodularidad, esto es, que para todo par A,B ⊆ X secumple
f(A ∪B) + f(A ∩B) 6 f(A) + f(B)
Ademas se dice que f es no decreciente, si A ⊆ B implica f(A) 6 f(B). Unafuncion f submodular, no decreciente y tal que f(∅) = 0 se denomina polimatroide. Unafuncion f se dice supermodular, si −f es una funcion submodular. Una funcion que seasimultaneamente submodular y supermodular, se denomina modular.
Observacion 1.4.2. En algunas ocasiones, cuando sea claro el contexto, denotaremos elconjunto {a1, a2, . . . , an} por medio de la lista a1a2 · · · an de tal manera que
f(a1a2 · · · an) := f({a1, a2, . . . , an})
Un tipo de funciones submodulares particularmente importantes en nuestro trabajoes introducido a continuacion. Dado un conjunto X y una coleccion ∆ ⊆ 2X , definimosla funcion f∆ : 2X → Z de tal manera que para cada I ⊆ X
f∆(I) :=∑J∈∆
qJ(I)
donde qJ : 2X → {0, 1} es la aplicacion que satisface
qJ(I) :=
{1 , I * J
0 , I ⊆ J

CAPITULO 1. PRELIMINARES 10
Es sencillo demostrar que para cada J ⊆ X la funcion qJ es un polimatroide y que lafuncion f∆, al ser una suma finita de polimatroides, es tambien polimatroide. Ademas,por la definicion de las qJ , f∆(I) es el numero de elementos en ∆ que no contienen a I.
Definicion 1.4.3. Dado un conjunto finito X, decimos que N ⊆ 2X × 2X es una FD-relacion sobre X, si satisface las siguientes propiedades para todo I, J,K ⊆ X:
1. Si J ⊆ I entonces (I, J) ∈ N .
2. Si (I, J), (J,K) ∈ N entonces (I,K) ∈ N .
3. Si (I, J), (I,K) ∈ N entonces (I, J ∪K) ∈ N .
Los operadores de clausura y las FD-relaciones, se encuentran en correspondenciabiunıvoca como lo muestran las siguientes dos proposiciones.
Proposicion 1.4.4. Sea X un conjunto finito.
1. Si N es una FD-relacion sobre X, la aplicacion cN : 2X → 2X tal que para todoI ⊆ X:
cN (I) =⋃
(I,J)∈N
J
define un operador de clausura sobre X.
2. Si c es un operador de clausura sobre X, la coleccion
Nc ={
(I, J) ∈ 2X × 2X : J ⊆ c(I)}
define una FD-relacion sobre X.
Proposicion 1.4.5. Sea X un conjunto finito. Teniendo en cuenta la notacion de laproposicion anterior se cumple lo siguiente:
1. Si N es una FD-relacion sobre X, entonces N = NcN .
2. Si c es un operador de clausura sobre X, entonces c = cNc.
La conexion entre las funciones submodulares no decrecientes, los operadores declausura y las FD-relaciones esta dada por la siguiente proposicion.
Proposicion 1.4.6. Sea f : 2X → R una funcion submodular no decreciente sobre unconjunto finito X.
1. La coleccion Nf ⊆ 2X × 2X define una FD-relacion sobre X:
Nf ={
(I, J) ∈ 2X × 2X : f(I) = f(I ∪ J)}

CAPITULO 1. PRELIMINARES 11
2. La aplicacion cf : 2X → 2X define un operador de clausura sobre X, donde paracada I ⊆ X:
cf (I) = {x ∈ X : f(I) = f(I ∪ {x})}
Definicion 1.4.7. Para cada FD-relacion N sobre X, definimos la coleccion de funcio-nes submodulares no decrecientes λ(N ) de la siguiente manera:
λ(N ) = {f : Nf = N}
A partir de esta definicion, podemos inducir una particion en el conjunto de lasfunciones submodulares no decrecientes definidas sobre X, por medio de la relacion deequivalencia f ≡ g ⇐⇒ Nf = Ng. Las clases de equivalencia determinadas por estarelacion, resultan invariantes bajo traslaciones y dilataciones o contracciones, ademasde ser cerradas bajo la suma usual de funciones. De manera mas general tenemos elsiguiente resultado.
Proposicion 1.4.8. Sean N una FD-relacion sobre X, f, g ∈ λ(N ) y α un numero real.Entonces f +α, f + g ∈ λ(N ), donde (f +α)(x) = f(x) +α y (f + g)(x) = f(x) + g(x).Ademas, si α es positivo, αf ∈ λ(N ).
Definicion 1.4.9. Una FD-relacion N sobre un conjunto finito X se dice topologica, siel operador de clausura asociado cN define una topologıa sobre X. En este caso, si Tes la topologıa determinada por cN escribiremos NT := NcN = N .
Observacion 1.4.10. Si (X,T ) es un espacio topologico finito y c es su operador declausura asociado, entonces NT denotara la FD-relacion determinada por el operadorc, es decir, NT = Nc
Proposicion 1.4.11. Si (X,T ) es un espacio topologico finito y f ∈ λ(NT ), entoncesf satisface las siguientes propiedades:
1. Si I ⊆ X y f(I) = f(∅) entonces I = ∅.
2. Si f(⋃mk=1 Ik) = f(
⋃mk=1 Ik∪J) entonces existe una sucesion de subconjuntos de X,
J1, J2, . . . , Jm tal que J =⋃mk=1 Jk con f(Ik) = f(Ik∪Jk) para todo k = 1, 2, . . . ,m.
Ademas, si una funcion submodular no decreciente f satisface 1 y 2, entonces el operadorcf es el operador de clausura de una topologıa sobre X.
Uno de los aspectos mas importantes de las funciones submodulares no decrecientesy las FD-relaciones, en el estudio de los espacios topologicos finitos, es la posibilidadde caracterizar propiedades topologicas por medio de valores numericos, tal y como lomuestran las siguientes proposiciones.

CAPITULO 1. PRELIMINARES 12
Proposicion 1.4.12. Dados (X,T ) un espacio topologico finito, f ∈ λ(NT ) y E ⊆ X,las siguientes afirmaciones son equivalentes:
1. E es un conjunto abierto en X.
2. (Ec, J) ∈ NT si, y solo si, J ⊆ Ec.
3. f(Ec) = f(Ec ∪ J) si, y solo si, J ⊆ Ec.
Proposicion 1.4.13. Dados (X,T ) un espacio topologico finito, f ∈ λ(NT ) y E ⊆ X,las siguientes afirmaciones son equivalentes:
1. E es un conjunto cerrado en X.
2. (E, J) ∈ NT si, y solo si, J ⊆ E.
3. f(E) = f(E ∪ J) si, y solo si, J ⊆ E.
Proposicion 1.4.14. Dados (X,T ) un espacio topologico finito, f ∈ λ(NT ) y E ⊆ X,las siguientes afirmaciones son equivalentes:
1. E es denso en X, esto es, E = X.
2. (E,X) ∈ NT .
3. f(E) = f(X).
Proposicion 1.4.15. Dados (X,T ) un espacio topologico finito, f ∈ λ(NT ), E ⊆ Xy e ∈ X, las siguientes afirmaciones son equivalentes:
1. e es un punto interior de E.
2. (Ec, {e}) /∈ NT .
3. f(Ec) < f(Ec ∪ {e}).
Proposicion 1.4.16. Dados (X,T ) un espacio topologico finito, f ∈ λ(NT ), E ⊆ Xy e ∈ X, las siguientes afirmaciones son equivalentes:
1. e es un punto de acumulacion de E.
2. (E \ {e} , {e}) ∈ NT .
3. f(E) = f(E \ {e}).

CAPITULO 1. PRELIMINARES 13
Proposicion 1.4.17. Dados (X,T ) un espacio topologico finito, f ∈ λ(NT ), E ⊆ Xy e ∈ X, las siguientes afirmaciones son equivalentes:
1. e es un punto exterior de E.
2. (E, {e}) /∈ NT .
3. f(E) < f(E ∪ {e}).
Las siguientes proposiciones no se encuentran explıcitamente en [9] y [1]. Aun cuandoson consecuencias casi inmediatas de los resultados recien mencionados, los agregamospara tener una lista completa de las caracterizaciones posibles.
Proposicion 1.4.18. Dados (X,T ) un espacio topologico finito, f ∈ λ(NT ), E ⊆ Xy e ∈ X, las siguientes afirmaciones son equivalentes:
1. e es un punto adherente a E.
2. (E, {e}) ∈ NT .
3. f(E ∪ {e}) = f(E).
Demostracion. Si c denota el operador de clausura asociado al espacio topologico, pordefinicion de las FD-relaciones NT y Nf tenemos:
e ∈ c(E)⇐⇒ {e} ⊆ c(E)⇐⇒ (E, {e}) ∈ NT ⇐⇒ f(E ∪ {e}) = f(E)
�
Proposicion 1.4.19. Dados (X,T ) un espacio topologico finito, f ∈ λ(NT ), E ⊆ Xy e ∈ X, las siguientes afirmaciones son equivalentes:
1. e es un punto frontera de E.
2. (E, {e}), (Ec, {e}) ∈ NT .
3. f(E ∪ {e}) = f(E) y f(Ec ∪ {e}) = f(Ec).
Demostracion. Si c denota el operador de clausura asociado al espacio topologico, essencillo ver a partir de la definicion de la frontera de E que Fr(E) = c(E) ∩ c(Ec). Elresultado se sigue directamente de la proposicion 1.4.18. �
Proposicion 1.4.20. Dados (X,T ) un espacio topologico finito, f ∈ λ(NT ), E ⊆ Xy e ∈ E, las siguientes afirmaciones son equivalentes:
1. e es un punto aislado de E.
2. (E \ {e} , {e}) /∈ NT .
3. f(E \ {e}) < f(E).
Demostracion. Por definicion, e ∈ E es un punto aislado de E si no es uno de sus puntosde acumulacion. El resultado se sigue inmediatamente de la proposicion 1.4.16. �

Capıtulo 2
Matrices asociadas a los espaciostopologicos finitos
Este capıtulo tiene como objetivo asociar a cada espacio topologico finito algunas ma-trices representativas, que permiten interpretar propiedades topologicas directamente desus entradas o por medio de operaciones matriciales. Ası como existen caracterizacionesnumericas de algunas propiedades a traves de las funciones submodulares, veremos quelas matrices permiten el estudio de otros tantos atributos e incluso la implementacionde algoritmos en el computador.
2.1. Matriz topogenea
Dado (X,T ) un espacio topologico finito donde X = {x1, . . . , xn}, denotaremos porUk al abierto minimal que contiene a xk, esto es
Uk =⋂
xk∈E∈T
E
y consideremos la coleccion U = {U1, . . . , Un}. Esta coleccion resulta ser una base para(X,T ), y mas aun, es la base minimal del espacio en el sentido que U esta contenidaen cualquier otra base que genere la topologıa T . En efecto, si B es una base para T ,entonces para cada xk existe Bk ∈ B tal que xk ∈ Bk ⊆ Uk, y como por definicionUk ⊆ Bk, concluimos que Uk = Bk y ası U ⊆ B.
A partir de la base minimal de un espacio, vamos a definir las matrices topogeneas queseran fundamentales en nuestro estudio de los espacios topologicos finitos. En adelante,usaremos de manera exclusiva la letra X para denotar un conjunto de n elementosX = {x1, . . . , xn}, a menos que se indique explıcitamente lo contrario.
15

CAPITULO 2. MATRICES ASOCIADAS A UN ESPACIO FINITO 16
Definicion 2.1.1. Sean (X,T ) un espacio topologico finito y U = {U1, . . . , Un} su baseminimal. La matriz topogenea asociada TX = [tij] es la matriz cuadrada de tamano n×nque satisface
tij =
{1 , xi ∈ Uj0 , en otro caso
Observacion 2.1.2. Shiraki en [10], introduce el termino topogenous matrix para denotarla matriz transpuesta de la matriz topogenea que acabamos de definir.
Observacion 2.1.3. El orden escogido para los elementos de X, cuando nos referimos a lamatriz topogenea, es esencial en la forma como fue definida. Cada conjunto finito X conn elementos, tiene n! matrices topogeneas asociadas, cada una de ellas correspondiendoa una unica permutacion de los elementos de X, por lo que cada vez que hagamosmencion a la matriz topogenea, debemos especificar la numeracion en el espacio queestemos estudiando.
Ejemplo 2.1.4. En el diagrama representamos la base minimal de una topologıa so-bre X = {x1, x2, x3, x4, x5, x6}. Los abiertos minimales son U1 = U5 = {x1, x5} , U2 ={x2, x4} , U3 = {x3} , U4 = {x4} , U6 = {x4, x6} y por lo tanto su matriz topogenea es laque se muestra a continuacion:
•x1
•x2
•x3
•x4
•x5
•x6
TX =
1 0 0 0 1 00 1 0 0 0 00 0 1 0 0 00 1 0 1 0 11 0 0 0 1 00 0 0 0 0 1
.
Ejemplo 2.1.5. Consideremos el espacio topologico (X,T ) donde X = {a, b, c, d, e} y
T = {∅, {b} , {d} , {b, d} , {d, e} , {b, d, e} , {a, b, d} , {a, b, d, e} , {a, b, c, d} , X}
Para las siguientes numeraciones obtenemos las respectivas matrices topogeneas, comopuede verificarse calculando la base minimal en cada caso:

CAPITULO 2. MATRICES ASOCIADAS A UN ESPACIO FINITO 17
(x1, x2, x3, x4, x5) = (a, b, c, d, e) (x1, x2, x3, x4, x5) = (b, d, e, a, c)
TX1 =
1 0 1 0 01 1 1 0 00 0 1 0 01 0 1 1 10 0 0 0 1
TX2 =
1 0 0 1 10 1 1 1 10 0 1 0 00 0 0 1 10 0 0 0 1
Observe que si tomamos la permutacion σ = (124)(35), se cumple TX2 = PT
σ TX1Pσ.
Las matrices topogeneas pueden caracterizarse mediante el siguiente
Teorema 2.1.6. [10] Sea T = [tij] una matriz topogenea de un espacio topologico finitoX. Entonces la matriz T satisface las siguientes condiciones, para todo i, j, k ∈ In:
1. tij ∈ {0, 1}.
2. tii = 1.
3. tik = tkj = 1 =⇒ tij = 1.
Recıprocamente, si una matriz T = [tij] satisface las condiciones anteriores, entonces Tinduce una topologıa sobre X.
Observamos que la condicion 2 esta relacionada con la propiedad de reflexividad y lacondicion 3 con la propiedad transitiva del orden inducido sobre el espacio. El siguienteresultado de Shiraki nos dice que la nocion de homeomorfismo entre espacios, puedeestudiarse a traves de las matrices topogeneas.
Teorema 2.1.7. [10] Sean (X,T ) y (Y,H ) dos espacios topologicos finitos con ma-trices topogeneas asociadas TX y TY , respectivamente. Entonces (X,T ) y (Y,H ) sonhomeomorfos si, y solo si, las matrices TX y TY son similares vıa una matriz de permu-tacion.
Demostracion. Sea Y = {y1, y2, . . . , yn} y denotemos por U = {U1, . . . , Un} y V ={V1, . . . , Vn} las bases minimales de los espacios (X,T ) y (Y,H ), respectivamente.Supongamos que existe f : (X,T ) −→ (Y,H ) un homeomorfismo con f(xk) = yσ(k)
donde σ ∈ Sn es la permutacion inducida por la biyeccion f . Entonces,
f(Uk) = f
( ⋂xk∈A∈T
A
)=
⋂f(xk)∈f(A)∈f(T )
f(A) =⋂
yσ(k)∈f(A)∈H
f(A) = Vσ(k)

CAPITULO 2. MATRICES ASOCIADAS A UN ESPACIO FINITO 18
luego, si TX = [tij] y TY = [lij] tenemos
tij = 1⇐⇒ xi ∈ Uj ⇐⇒ f(xi) ∈ f(Uj)⇐⇒ yσ(i) ∈ Vσ(j) ⇐⇒ lσ(i)σ(j) = 1
por lo tanto tij = lσ(i)σ(j) para todo i, j ∈ In y ası TX = PTσ TY Pσ (observacion 1.2.4),
esto es, las matrices topogeneas son similares vıa la matriz de permutacion Pσ.
Recıprocamente, supongamos que TX y TY son similares vıa la matriz de permutacionPσ, entonces TX = PT
σ TY Pσ. Consideremos la aplicacion
f : (X,T ) −→ (Y,H )
xk 7−→ f(xk) = yσ(k)
Como σ ∈ Sn es biyectiva, f tambien lo es. Ademas, la aplicacion satisface f(Uk) = Vσ(k)
para todo k ∈ In, lo que induce una biyeccion entre las bases minimales U y V . Comotodo subconjunto abierto en un espacio topologico es union de elementos de la baseminimal, concluimos que E ∈ T es equivalente a f(E) ∈H y por consiguiente f es unhomeomorfismo. �
2.2. Triangularizacion de matrices topogeneas
Sea (X,T ) un espacio topologico finito con base minimal U = {U1, . . . , Un} y matriztopogenea asociada TX = [tij]. En la seccion 1.3 del capıtulo anterior, definimos larelacion 6 sobre X por
xi 6 xj ⇐⇒ xi ∈ Uj ⇐⇒ Ui ⊆ Uj ⇐⇒ tij = 1.
Observacion 2.2.1. La matriz topogenea del espacio opuesto satisface TXop = TTX .
Esta relacion es un preorden en el espacio, es decir, es una relacion reflexiva y tran-sitiva. El siguiente teorema, debido a Alexandroff, nos dice bajo que condicion dicharelacion es un orden parcial sobre X.
Teorema 2.2.2. [2] Los espacios topologicos finitos estan en correspondencia biunıvocacon los preordenes. Ademas, un espacio topologico finito (X,T ) es un espacio T0 si, ysolo si, (X,6) es un conjunto parcialmente ordenado.
Observacion 2.2.3. Es bien conocido que todo espacio T1 es tambien un espacio T0.Sin embargo, los espacios finitos T1 no son muy interesantes puesto que resultan serdiscretos. En efecto, supongamos que (X,T ) es un espacio T1 con base minimal U yfijemos k un ındice arbitrario. Si xi ∈ Uk, suponiendo i 6= k, entonces para todo E ∈ Tque contenga a xk tenemos {xi, xk} ⊆ E, lo que no es posible pues por hipotesis (porser T1) existe B ∈ T tal que xk ∈ B y xi /∈ B. Por lo tanto i = k y ası Uk = {xk} paratodo k, lo cual muestra que T es la topologıa discreta sobre X.

CAPITULO 2. MATRICES ASOCIADAS A UN ESPACIO FINITO 19
Ejemplo 2.2.4. Consideremos el espacio (X,T ) del ejemplo 2.1.5 con la numeracion(x1, x2, x3, x4, x5) = (a, b, c, d, e); dicho espacio satisface el axioma de separacion T0. Eldiagrama de Hasse asociado al poset (X,6) es el siguiente:
U1 = {x1, x2, x4}U2 = {x2}U3 = {x1, x2, x3, x4}U4 = {x4}U5 = {x4, x5}
•x1
•x2
•x3
•x4
•x5
En el ejemplo 2.1.5, fue posible asociar al espacio considerado una matriz topogeneatriangular superior. Esto no solamente sucede con el espacio del ejemplo, sino para todoespacio T0. Mas exactamente tenemos el siguiente resultado debido a Shiraki.
Teorema 2.2.5. [10] Un espacio topologico finito (X,T ) es un espacio T0 si, y solosi, la matriz topogenea asociada TX es similar vıa una matriz de permutacion, a unamatriz topogenea triangular superior.
Demostracion. Supongamos que el espacio satisface el axioma T0. Consideremos unapermutacion del espacio, X = {x1, . . . , xn}, de tal manera que
xi 6 xj =⇒ i 6 j
La matriz topogenea TX = [tij] asociada a esta ultima numeracion resulta triangular
superior: si i > j entonces xi xj, lo que es equivalente a tij = 0. Finalmente, como TXse obtiene de TX al realizar una permutacion de los ındices, estas matrices son similares.
Recıprocamente, supongamos que TX y TX son similares vıa una matriz de permuta-cion, donde TX es triangular superior. El espacio topologico X = {x1, . . . , xn} asociado
a la matriz topogenea TX es un espacio T0: sea xi 6= xj, suponiendo sin perdida de
generalidad que i > j, entonces tij = 0 lo cual es equivalente a tener xi /∈ Uj y xj ∈ Uj.Como el axioma T0 es un invariante topologico, por medio del teorema 2.1.7, concluimosque X tambien satisface dicho axioma. �
Para todo espacio topologico finito X, existe un espacio T0 con el mismo tipo dehomotopıa de X, como lo muestra el siguiente resultado.
Teorema 2.2.6. [7] Sea (X,T ) un espacio topologico finito y X = X/ ∼ el espaciocociente obtenido por medio de la relacion de equivalencia ∼ sobre X definida por:xi ∼ xj si xi 6 xj y xj 6 xi. Entonces X es un espacio T0 y la aplicacion canonica
q : X −→ X es una equivalencia homotopica.

CAPITULO 2. MATRICES ASOCIADAS A UN ESPACIO FINITO 20
Vamos a describir a continuacion un procedimiento para encontrar el espacio T0
homotopicamente equivalente a un espacio topologico finito arbitrario X, por medio dela identificacion de elementos equivalentes a partir de la matriz topogenea, observandola repeticion de filas y columnas, como se demuestra a continuacion.
Proposicion 2.2.7. Sea TX = [tij] la matriz topogenea asociada al espacio topologico
finito X. Si 〈xi〉, 〈xj〉 ∈ X = X/ ∼ entonces:
[TX ]•i = [TX ]•j ⇐⇒ 〈xi〉 = 〈xj〉 ⇐⇒ [TX ]i• = [TX ]j•
Demostracion. Probaremos solamente la primera equivalencia pues el argumento parala segunda es similar. Supongamos 〈xi〉 = 〈xj〉, entonces xi 6 xj y xj 6 xi luego paratodo k ∈ In:
tki = 1⇐⇒ xk 6 xi ⇐⇒ xk 6 xj ⇐⇒ tkj = 1
y ası [TX ]•i = [TX ]•j. Recıprocamente, si [TX ]•i = [TX ]•j entonces, en particular, 1 =tii = tij y tji = tjj = 1 luego xi 6 xj y xj 6 xi y por consiguiente 〈xi〉 = 〈xj〉. �
De lo anterior, vemos que podemos obtener la matriz topogenea TX asociada al
espacio cociente X = X/ ∼, removiendo filas y columnas repetidas en TX , excepto unapor cada clase de equivalencia.
Ejemplo 2.2.8. El siguiente es un diagrama que representa la base minimal de unespacio topologico X junto con su matriz topogenea asociada:
•x1
•x2 •x3
•x4
•x5
•x6•x7
•x8
TX =
1 0 0 0 1 0 0 10 1 0 1 0 1 1 00 0 1 0 0 0 0 00 0 0 1 0 0 1 01 0 0 0 1 0 0 10 1 0 1 0 1 1 00 0 0 1 0 0 1 01 0 0 0 1 0 0 1
Como las columnas 1, 5 y 8 son iguales, entonces 〈x1〉 = {x1, x5, x8}; las columnas
2 y 6 muestran que 〈x2〉 = {x2, x6} y como las columnas 4 y 7 son iguales, tenemos〈x4〉 = {x4, x7} y 〈x3〉 = {x3}. Luego al remover las filas y columnas 5, 6, 7 y 8obtenemos la correspondiente matriz del espacio cociente:

CAPITULO 2. MATRICES ASOCIADAS A UN ESPACIO FINITO 21
•〈x2〉 •〈x3〉
•〈x1〉
•〈x4〉
TX =
1 0 0 00 1 0 10 0 1 00 0 0 1
.
Describiremos a continuacion el procedimiento para triangularizar matrices topogeneassuponiendo que el espacio X es T0 inicialmente. Dada la matriz topogenea TX = [tij]
definimos Mk =n∑i=1
tik = |Uk|, para cada k ∈ In, organizandolos de forma ascendente
Mk1 6Mk2 6 · · · 6Mkn
y consideramos la permutacion σ =
(1 2 · · · nk1 k2 · · · kn
). Entonces, en virtud de la de-
mostracion del teorema 2.2.5 y de la observacion 1.2.4 del capıtulo anterior, la matriztopogenea PT
σ TXPσ es triangular superior: si i > j y tσ(i)σ(j) = 1, entonces xσ(i) < xσ(j)
de donde Mki < Mkj lo que contradice nuestra ordenacion de los Mk, luego tσ(i)σ(j) = 0.
Ejemplo 2.2.9. Consideremos el espacio topologico X, representado por su diagramade Hasse, junto con su matriz topogenea asociada:
•x1
•x2
•x3
•x4
•x5
•x6
TX =
1 0 0 0 1 01 1 0 1 1 01 0 1 0 1 01 0 0 1 1 00 0 0 0 1 01 1 1 1 1 1
Las sumas en cada columna son: M1 = 5,M2 = M3 = 2,M4 = 3,M5 = 6,M6 = 1. Portanto obtenemos la permutacion
σ =
(1 2 3 4 5 66 2 3 4 1 5
)= (165)
CAPITULO 2. MATRICES ASOCIADAS A UN ESPACIO FINITO 22
cuya matriz asociada es
Pσ =
0 0 0 0 1 00 1 0 0 0 00 0 1 0 0 00 0 0 1 0 00 0 0 0 0 11 0 0 0 0 0
.
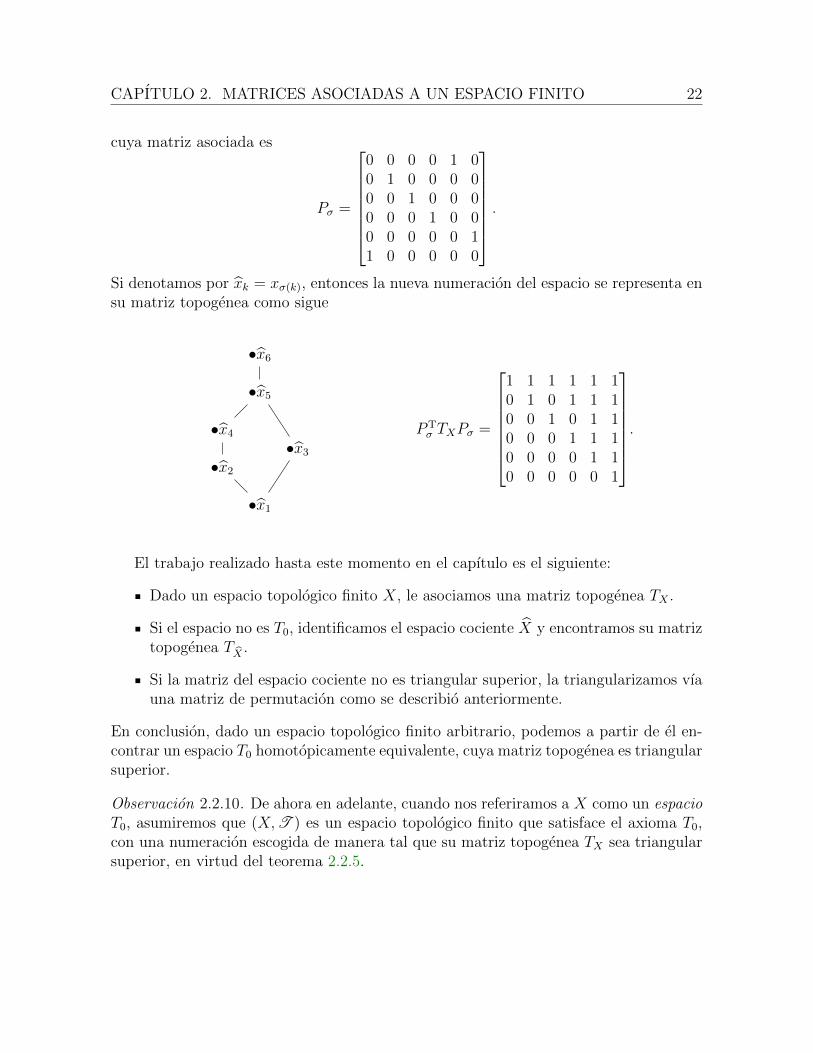
Si denotamos por xk = xσ(k), entonces la nueva numeracion del espacio se representa ensu matriz topogenea como sigue
•x5
•x2
•x3
•x4
•x6
•x1
PTσ TXPσ =
1 1 1 1 1 10 1 0 1 1 10 0 1 0 1 10 0 0 1 1 10 0 0 0 1 10 0 0 0 0 1
.
El trabajo realizado hasta este momento en el capıtulo es el siguiente:
Dado un espacio topologico finito X, le asociamos una matriz topogenea TX .
Si el espacio no es T0, identificamos el espacio cociente X y encontramos su matriztopogenea TX .
Si la matriz del espacio cociente no es triangular superior, la triangularizamos vıauna matriz de permutacion como se describio anteriormente.
En conclusion, dado un espacio topologico finito arbitrario, podemos a partir de el en-contrar un espacio T0 homotopicamente equivalente, cuya matriz topogenea es triangularsuperior.
Observacion 2.2.10. De ahora en adelante, cuando nos referiramos a X como un espacioT0, asumiremos que (X,T ) es un espacio topologico finito que satisface el axioma T0,con una numeracion escogida de manera tal que su matriz topogenea TX sea triangularsuperior, en virtud del teorema 2.2.5.

CAPITULO 2. MATRICES ASOCIADAS A UN ESPACIO FINITO 23
2.2.1. Recorriendo Top(X)
Usando las matrices topogeneas, queremos encontrar una forma de transitar a travesdel retıculo Top(X).
Proposicion 2.2.11. Sean (X,T1) y (X,T2) espacios topologicos finitos (no necesa-riamente T0) con bases minimales U = {U1, . . . , Un} y V = {V1, . . . , Vn}, respectiva-mente. Entonces la base minimal W = {W1, . . . ,Wn} para el espacio (X,T ∗), dondeT ∗ = 〈T1 ∪T2〉, satisface Wk = Uk ∩ Vk para todo k ∈ In.
Demostracion. Sea k ∈ In un ındice arbitrario. Por definicion, Wk =⋂xk∈A∈T ∗ A; co-
mo Uk, Vk ∈ T ∗, pues T1,T2 ⊆ T ∗, entonces Wk ⊆ Uk ∩ Vk. Por otro lado, por laconstruccion de T ∗ podemos escribir
Wk =
p⋃m=1
Em, donde Em =r⋂j=1
A(1)mj∩
s⋂j=1
A(2)mj, A(1)
mj∈ T1, A
(2)mj∈ T2
esto es, Wk es union de intersecciones finitas entre elementos de las dos topologıas T1 yT2 (ver observacion 1.3.3 del capıtulo anterior). Como xk ∈ Wk, debe existir m∗ tal quexk ∈ Em∗ y ası
Uk ∩ Vk ⊆r⋂j=1
A(1)m∗j∩
s⋂j=1
A(2)m∗j
= Em∗ ⊆p⋃
m=1
Em = Wk
demostrando la igualdad Wk = Uk∩Vk; como k es arbitrario, obtenemos el resultado. �
El siguiente teorema nos muestra la manera de avanzar en Top(X), es decir, nospermite encontrar el supremo de dos topologıas.
Teorema 2.2.12. Sean X1 = (X,T1), X2 = (X,T2) y X∗ = (X,T ∗) espacios topologi-cos finitos (no necesariamente T0) con matrices topogeneas asociadas TX1 , TX2 y TX∗,respectivamente. Si T ∗ = 〈T1 ∪T2〉 entonces
TX∗ = TX1 ∧ TX2 (2.1)
Recıprocamente, si existen espacios finitos X1, X2 y X∗ que satisfacen (2.1) entoncesT ∗ = 〈T1 ∪T2〉.
Demostracion. Supongamos que T ∗ = 〈T1 ∪ T2〉 y fijemos un ındice k ∈ In. Por laproposicion 2.2.11 sabemos que Wk = Uk ∩ Vk, luego xi ∈ Wk ⇐⇒ xi ∈ Uk y xi ∈ Vk.Como la columna k de una matriz topogenea representa el abierto minimal que contienea xk, entonces para cada i ∈ In se cumple [TX∗ ]ik = mın {[TX1 ]ik, [TX2 ]ik}.
La segunda parte del teorema se tiene por la unicidad de la base minimal para unatopologıa, pues si se cumple (2.1), por la parte anterior tendrıamos TX∗ = TX1 ∧ TX2 =T(X,〈T1∪T2〉) y ası T ∗ = 〈T1 ∪T2〉. �

CAPITULO 2. MATRICES ASOCIADAS A UN ESPACIO FINITO 24
Una forma de retroceder en Top(X) es hallando subtopologıas, lo que es posibleusando matrices topogeneas como lo muestra el siguiente
Corolario 2.2.13. Sean X1 = (X,T1) y X2 = (X,T2) espacios topologicos finitos (nonecesariamente T0). Entonces T1 ⊆ T2 si, y solo si, TX2 6 TX1.
Demostracion. El resultado se sigue de la siguiente cadena de equivalencias
T1 ⊆ T2 ⇐⇒ T2 = 〈T1 ∪T2〉 ⇐⇒ TX2 = TX1 ∧ TX2 ⇐⇒ TX2 6 TX1
�
Observacion 2.2.14. Si TX1 6 TX2 entonces PTX1PT 6 PTX2P
T para toda matriz depermutacion P .
Consideremos ahora el retıculo Top(X) de las topologıas que pueden definirse sobreX, particionado por la relacion de homeomorfismo, cuyas clases de equivalencia estan
dadas por T = {T ∈ Top(X) : T es homeomorfa a T }:
HTop(X) :={
T : T ∈ Top(X)}.
Si sobre este conjunto definimos la relacion �:
T � H ⇐⇒ existen T ∈ T y H ∈ H tales que T ⊆ H
veamos que (HTop(X),�) es un poset.
La propiedad reflexiva es inmediata de la definicion de �. Supongamos T � H y
H � E ; por definicion existen topologıas T ∈ T ,H y G ∈ H y E ∈ E tales que T ⊆ Hy G ⊆ E o, equivalentemente por el corolario 2.2.13,
TE 6 TG y TH 6 TT
luego para cualquier par P,Q matrices de permutacion se cumple
PTEPT 6 PTGP
T y QTHQT 6 QTTQ
T.
Como G y H son homeomorfas, por el teorema 2.1.7, existen P,Q matrices de per-mutacion tales que PTGP
T = QTHQT de donde PTEP
T 6 QTTQT. Como la matriz
PTEPT representa una topologıa E∗ ∈ E y QTTQ
T representa una cierta topologıa
T ∗ ∈ T concluimos que T ∗ ⊆ E∗ y por lo tanto T � E , lo que prueba la transitividadde �.
Para probar la antisimetrıa de �, suponemos T � H y H � T . Entonces existen
T , E ∈ T y G,H ∈ H tales que T ⊆ H y G ⊆ E , luego para cualquier par P,Q matricesde permutacion se cumple
QTEQT 6 QTGQ
T y PTHPT 6 PTT P
T.

CAPITULO 2. MATRICES ASOCIADAS A UN ESPACIO FINITO 25
Supongamos, en virtud del teorema 2.1.7, que P y Q son tales que QTGQT = PTHP
T,entonces
QTEQT 6 QTGQ
T = PTHPT 6 PTT P
T
donde las matrices de los extremos representan topologıas en la clase T . Si logramosdemostrar que dichas matrices son iguales, tendremos la igualdad tambien para la matriz
del centro, de donde se seguirıa que T = H . Esto es justamente lo que ocurre, y loenunciamos en el siguiente resultado.
Proposicion 2.2.15. Si X y Y son espacios topologicos finitos homeomorfos (no ne-cesariamente T0), tales que TX 6 TY entonces TX = TY .
Demostracion. Por hipotesis, existe una matriz de permutacion P tal que TX = PTY PT,
luego sum(TX) = sum(TY ), pues la permutacion cambia la posicion pero no el valor delas entradas de la matriz. Si suponemos que TX 6= TY , existirıa una entrada ij tal que[TX ]ij = 0 y [TY ]ij = 1, de donde sum(TX) < sum(TY ) lo que es contradictorio. �
De manera analoga, considerando a Top0(X) como el subretıculo formado por lastopologıas T0 sobre X, se puede probar que (HTop0(X),�) es un poset, donde
HTop0(X) :={
T : T ∈ Top0(X)}.
En este caso denotaremos la clase T simplemente por T , donde asumimos, sin perdi-da de generalidad, que T es una topologıa cuya matriz topogenea es triangular superior.
El maximo de HTop0(X) es 2X y el mınimo es la topologıa E cuya matriz TE satisface[TE ]ij = 1 si i 6 j (su diagrama de Hasse representa un orden total en X). Ademas,podemos caracterizar las topologıas casi maximales (ultratopologıas) como lo indica lasiguiente
Proposicion 2.2.16. El elemento maximo de HTop0(X) \{
2X}
es la clase de la topo-logıa asociada a la matriz
1 1 0 · · · 00 1 0 · · · 0
0 0 1. . . 0
......
. . . . . ....
0 0 · · · 0 1
. (2.2)
Demostracion. Sabemos que sum(In) = n, donde la matriz identidad In representa latopologıa discreta, luego como consecuencia del corolario 2.2.13 la matriz A asociadaa una ultratopologıa debe satisfacer sum(A) = n + 1, es decir, debe haber solamenteuna entrada no nula por fuera de la diagonal como en (2.2). Finalmente, la entrada nonula puede situarse en cualquiera de los n2 − n lugares de la matriz que no estan en ladiagonal, donde cada una de las opciones genera un espacio topologico T0 distinto. �
CAPITULO 2. MATRICES ASOCIADAS A UN ESPACIO FINITO 26
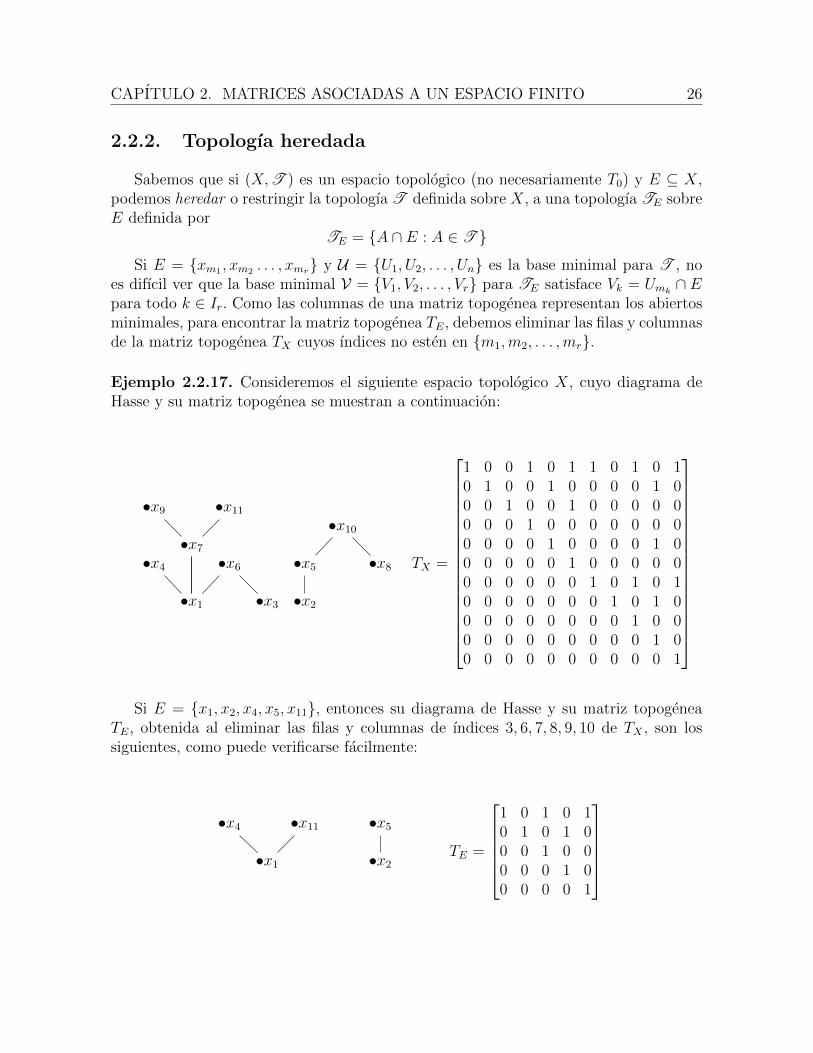
2.2.2. Topologıa heredada
Sabemos que si (X,T ) es un espacio topologico (no necesariamente T0) y E ⊆ X,podemos heredar o restringir la topologıa T definida sobre X, a una topologıa TE sobreE definida por
TE = {A ∩ E : A ∈ T }
Si E = {xm1 , xm2 . . . , xmr} y U = {U1, U2, . . . , Un} es la base minimal para T , noes difıcil ver que la base minimal V = {V1, V2, . . . , Vr} para TE satisface Vk = Umk ∩ Epara todo k ∈ Ir. Como las columnas de una matriz topogenea representan los abiertosminimales, para encontrar la matriz topogenea TE, debemos eliminar las filas y columnasde la matriz topogenea TX cuyos ındices no esten en {m1,m2, . . . ,mr}.
Ejemplo 2.2.17. Consideremos el siguiente espacio topologico X, cuyo diagrama deHasse y su matriz topogenea se muestran a continuacion:
•x1 •x2•x3
•x4 •x5•x6
•x7
•x8
•x9
•x10
•x11
TX =
1 0 0 1 0 1 1 0 1 0 10 1 0 0 1 0 0 0 0 1 00 0 1 0 0 1 0 0 0 0 00 0 0 1 0 0 0 0 0 0 00 0 0 0 1 0 0 0 0 1 00 0 0 0 0 1 0 0 0 0 00 0 0 0 0 0 1 0 1 0 10 0 0 0 0 0 0 1 0 1 00 0 0 0 0 0 0 0 1 0 00 0 0 0 0 0 0 0 0 1 00 0 0 0 0 0 0 0 0 0 1
Si E = {x1, x2, x4, x5, x11}, entonces su diagrama de Hasse y su matriz topogenea
TE, obtenida al eliminar las filas y columnas de ındices 3, 6, 7, 8, 9, 10 de TX , son lossiguientes, como puede verificarse facilmente:
•x1 •x2
•x4 •x5•x11
TE =
1 0 1 0 10 1 0 1 00 0 1 0 00 0 0 1 00 0 0 0 1

CAPITULO 2. MATRICES ASOCIADAS A UN ESPACIO FINITO 27
2.2.3. Componentes arco-conexas
Proposicion 2.2.18. La matriz topogenea asociada a un espacio topologico finito X, essimilar vıa permutacion a la suma directa de las matrices topogeneas asociadas a cadauna de las componentes arco-conexas.
Demostracion. Sean TX la matriz topogenea del espacio X y X1, . . . , Xm sus compo-nentes arco-conexas. Consideramos una permutacion τ de tal manera que organizamospor bloques los elementos de las componentes: si Xk =
{zik−1+1, . . . , zik
}donde i0 = 0,
im = n, entonces tomamos
τ =
(1 · · · i1 i1 + 1 · · · i2 · · · nz1 · · · zi1 zi1+1 · · · zi2 · · · zim
).
Si TX = [tij] es la matriz topogenea con esta nueva numeracion, debemos tener quetij = 0 si xi ∈ Xi y xj ∈ Xj con i 6= j, pues de lo contrario tendrıamos xi 6 xj y portanto serıan elementos en una misma componente arco-conexa. Luego TX es una matrizpor bloques de la forma
TX = PTτ TXPτ =
TX1 0 . . . 0
0 TX2
. . ....
.... . . . . . 0
0 . . . 0 TXm
y donde cada bloque diagonal TXi es la matriz binaria que representa la relacion deorden en Xi, heredada de TX , es decir, es la matriz topogenea de la componente Xi. �
La matriz M = TX+TTX−In satisface [M ]ij = 1 si, y solo si, xi y xj son comparables.
Recordamos que dos elementos xi y xj estan en la misma componente arco-conexa si, ysolo si, existe una sucesion xi = xk1 , xk2 , . . . , xkr = xj tal que xkq y xkq+1 son compara-bles para cada q = 1, . . . , r − 1, o equivalentemente, que el producto interno de las filaskq y kq+1 cumpla 〈[M ]kq•, [M ]kq+1•〉 =
∑ns=1[M ]kq ,s[M ]kq+1,s 6= 0.
Lo anterior sugiere un procedimiento para encontrar la componente arco-conexa Xi
a la que pertenece el elemento xi, que describimos a continuacion: sea X(1)i = {xi},
calculamos el producto interno de la fila i con todas las demas filas de la matriz M . Sitodos estos valores son iguales a cero, entonces Xi = X
(1)i = {xi}, de lo contrario existe
una fila j1 tal que el producto interno no es nulo, luego hacemos X(2)i = {xi, xj1}. A
continuacion, calculamos el producto interno entre la fila i y las demas filas (excepto laj1-esima), y tambien los productos internos entre la fila j1 con las demas filas (excepto
la i-esima). Si todos estos valores son nulos, tendremos Xi = X(2)i = {xi, xj1}, de lo
contrario existe una fila j2 tal que su producto interno con la fila i o con la fila j1 no seanula, luego tomamos X
(3)i = {xi, xj1 , xj2}.

CAPITULO 2. MATRICES ASOCIADAS A UN ESPACIO FINITO 28
Procediendo de manera recursiva, seguimos anadiendo puntos hasta obtener un con-junto X
(m)i =
{xi, xj1 , . . . , xjm−1
}tal que X
(m)i = X, en cuyo caso el espacio X es
arco-conexo, o X(m)i es tal que para todo j /∈ {i, j1, . . . , jm−1}, el producto interno de
la fila j con cualquier fila con ındice en {i, j1, . . . , jm−1} es igual a cero, en cuyo caso
X(m)i = Xi.
El siguiente algoritmo resume la anterior descripcion.
Algoritmo: Componentes arco-conexas de un espacio
Entrada: Matriz topogenea TX = [tij]n×n asociada al espacio X.Salida: Componentes arco-conexas del espacio X, representadas en las filas de la
matriz resultante M .
1. Calcular la matriz M = TX + TTX − In y tomar r = 1, k = 1.
2. mientras r = 1
3. n =numero de filas de M .
4. para i = k + 1 · · ·n
5. si 〈[M ]k•, [M ]i•〉 6= 0 hacer [M ]k• = [M ]k• ∨ [M ]i•, eliminar la fila i,
tomar k = 1 e ir al paso 7.
6. fin para
7. si i = n hacer k ← k + 1.
8. si k = n hacer r = 0.
9. fin mientras
Ejemplo 2.2.19. El espacio representado a continuacion tiene tres componentes arco-conexas.
•x4 •x10 •x5 •x9
•x1 •x8 •x3 •x6
•x7 •x2
CAPITULO 2. MATRICES ASOCIADAS A UN ESPACIO FINITO 29
TX =
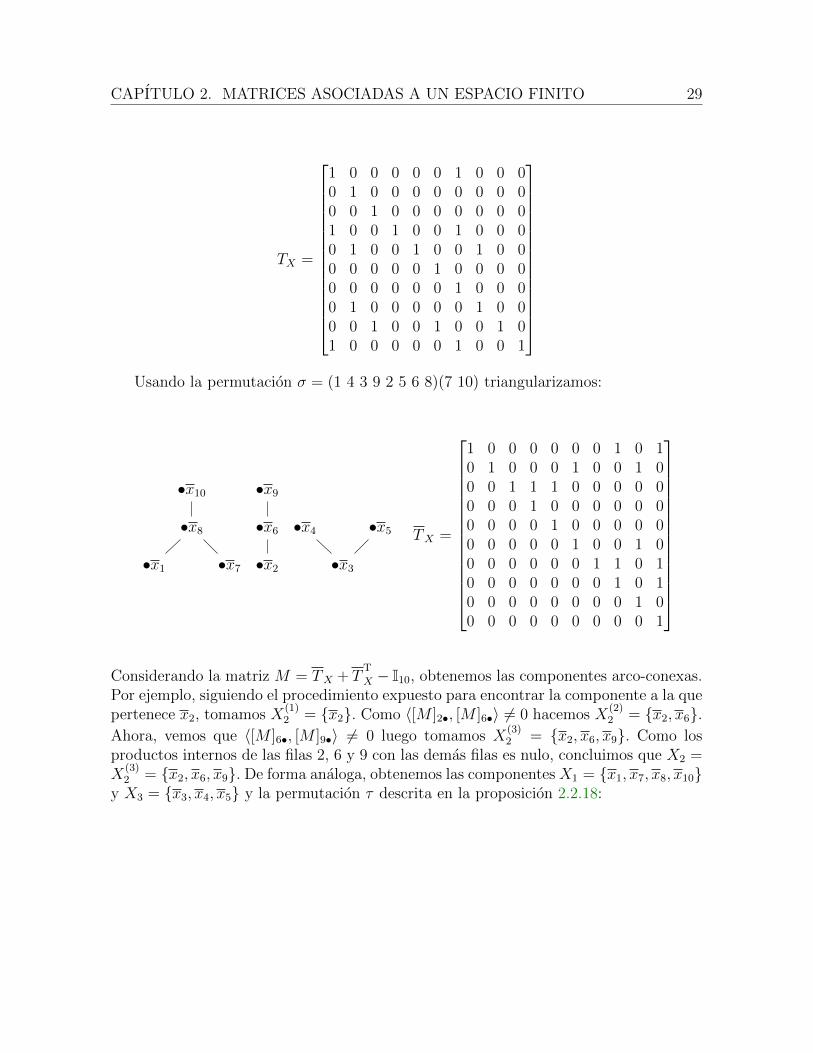
1 0 0 0 0 0 1 0 0 00 1 0 0 0 0 0 0 0 00 0 1 0 0 0 0 0 0 01 0 0 1 0 0 1 0 0 00 1 0 0 1 0 0 1 0 00 0 0 0 0 1 0 0 0 00 0 0 0 0 0 1 0 0 00 1 0 0 0 0 0 1 0 00 0 1 0 0 1 0 0 1 01 0 0 0 0 0 1 0 0 1
Usando la permutacion σ = (1 4 3 9 2 5 6 8)(7 10) triangularizamos:
•x1 •x7 •x2 •x3
•x8 •x6 •x4 •x5
•x10 •x9
TX =
1 0 0 0 0 0 0 1 0 10 1 0 0 0 1 0 0 1 00 0 1 1 1 0 0 0 0 00 0 0 1 0 0 0 0 0 00 0 0 0 1 0 0 0 0 00 0 0 0 0 1 0 0 1 00 0 0 0 0 0 1 1 0 10 0 0 0 0 0 0 1 0 10 0 0 0 0 0 0 0 1 00 0 0 0 0 0 0 0 0 1
Considerando la matriz M = TX + TT
X − I10, obtenemos las componentes arco-conexas.Por ejemplo, siguiendo el procedimiento expuesto para encontrar la componente a la quepertenece x2, tomamos X
(1)2 = {x2}. Como 〈[M ]2•, [M ]6•〉 6= 0 hacemos X
(2)2 = {x2, x6}.
Ahora, vemos que 〈[M ]6•, [M ]9•〉 6= 0 luego tomamos X(3)2 = {x2, x6, x9}. Como los
productos internos de las filas 2, 6 y 9 con las demas filas es nulo, concluimos que X2 =X
(3)2 = {x2, x6, x9}. De forma analoga, obtenemos las componentes X1 = {x1, x7, x8, x10}
y X3 = {x3, x4, x5} y la permutacion τ descrita en la proposicion 2.2.18:

CAPITULO 2. MATRICES ASOCIADAS A UN ESPACIO FINITO 30
M =
1 0 0 0 0 0 0 1 0 10 1 0 0 0 1 0 0 1 00 0 1 1 1 0 0 0 0 00 0 1 1 0 0 0 0 0 00 0 1 0 1 0 0 0 0 00 1 0 0 0 1 0 0 1 00 0 0 0 0 0 1 1 0 11 0 0 0 0 0 1 1 0 10 1 0 0 0 1 0 0 1 01 0 0 0 0 0 1 1 0 1
τ =
(1 2 3 4 5 6 7 8 9 101 7 8 10 2 6 9 3 4 5
)
Finalmente considerando TX = PTτ TXPτ = PT
σ◦τTXPσ◦τ encontramos una matriz trian-gular superior en la que podemos identificar facilmente las tres componentes arco-conexas del espacio: {x1, x2, x3, x4}, {x5, x6, x7} y {x8, x9, x10} donde xk = xσ(τ(k))
•x1 •x2 •x5 •x8
•x3 •x6 •x9 •x10
•x4 •x7
TX =
1 0 1 1 0 0 0 0 0 00 1 1 1 0 0 0 0 0 00 0 1 1 0 0 0 0 0 00 0 0 1 0 0 0 0 0 00 0 0 0 1 1 1 0 0 00 0 0 0 0 1 1 0 0 00 0 0 0 0 0 1 0 0 00 0 0 0 0 0 0 1 1 10 0 0 0 0 0 0 0 1 00 0 0 0 0 0 0 0 0 1
2.2.4. Espacio producto y suma ordinal
Si X = {x1, . . . , xn} y Y = {y1, . . . , ym} son dos espacios topologicos finitos, entoncesen el producto cartesiano consideramos la siguiente numeracion X × Y = {z1, . . . , znm}donde zm(i−1)+j = (xi, yj).
Proposicion 2.2.20. Si TX y TY son las matrices topogeneas asociadas a los espaciosX y Y , entonces la matriz topogenea asociada al producto cartesiano X × Y satisface
TX×Y = TX ⊗ TY
Demostracion. Es sencillo ver que ϕ : In× Im −→ Inm tal que ϕ(i, j) = m(i− 1) + j, esuna funcion biyectiva. Debemos probar que [TX×Y ]pq = [TX⊗TY ]pq para todo p, q ∈ Inm.

CAPITULO 2. MATRICES ASOCIADAS A UN ESPACIO FINITO 31
Por medio de ϕ sabemos que existen (i, j), (k, l) ∈ In × Im tales que p = m(i− 1) + j yq = m(k − 1) + l. Entonces
[TX×Y ]pq = 1⇐⇒ zp 6 zq
⇐⇒ (xi, yj) 6 (xk, yl)
⇐⇒ xi 6 xk y yj 6 yl
⇐⇒ [TX ]ik = 1 y [TY ]jl = 1
⇐⇒ [TX ]ik[TY ]jl = 1
⇐⇒ [TX ⊗ TY ]pq = 1 �
Las siguiente definicion sera util para el estudio de los weak points en el capıtulo 3.
Definicion 2.2.21. La suma ordinal X ⊕ Y de dos espacios finitos X y Y , es la uniondisyunta X t Y junto con la relacion 6, que preserva el orden entre los elementos de Xy de Y , y donde se cumple que x 6 y para todo x ∈ X y y ∈ Y .
Proposicion 2.2.22. Si X y Y son espacios finitos con matrices topogeneas asociadasTX y TY , respectivamente, entonces la matriz topogenea de X ⊕ Y satisface
TX⊕Y =
[TX 1O TY
].
Demostracion. Si X = {x1, . . . , xn} y Y = {y1, . . . , ym} entonces ordenamos su sumaordinal como X ⊕Y = {x1, . . . , xn, y1, . . . , ym}. Con este orden, basta con interpretar ladefinicion de suma ordinal y obtener la respectiva matriz topogenea, pues los bloquesdiagonales TX y TY indican que las relaciones de orden en cada espacio X y Y semantienen, y el bloque 1 representa el hecho que todo elemento de Y es cota superiorde X. �
2.2.5. Funcion de entropıa
La funcion de entropıa rA definida sobre una FD-relacion arbitraria se estudia en[12], en un intento por aplicar la teorıa de la informacion en diferentes estructuras. Paracada N FD-relacion, existe un conjunto especial A tal que rA ∈ λ(N ), lo que en nuestrocaso particular para FD-relaciones topologicas, permite encontrar una funcion polima-troide que caracteriza las propiedades topologicas del espacio, como vimos en el capıtulo1. Pretendemos en esta subseccion proponer un algoritmo, facilmente programable enun computador, para hallar los valores de dicha funcion de entropıa.

CAPITULO 2. MATRICES ASOCIADAS A UN ESPACIO FINITO 32
Sabemos que un conjunto E = {xi1 , . . . , xir} ⊆ X es cerrado si, y solo si, coincide consu clausura lo que significa que todo punto adherente de E es un elemento de E. Usandola base minimal U = {Ux}x∈X del espacio X, tenemos la siguiente caracterizacion
E es cerrado en X ⇐⇒ Ux ∩ E = ∅ para todo x /∈ E (2.3)
Teniendo en cuenta que cada columna k de la matriz topogenea representa el abiertominimal Uk, hallaremos uno a uno los puntos adherentes de E, que no esten en E, encon-trando ası el menor cerrado C que lo contenga, usando la caracterizacion dada en (2.3)mediante el siguiente procedimiento: sea C(1) := E = {xi1 , . . . , xir}, para cada xk conk /∈ {i1, . . . , ir}, consideramos la k-esima columna de la matriz topogenea y revisamosen dicha columna los elementos de las filas i1, . . . , ir; si todos ellos son nulos, entoncesC = C(1), de lo contrario, existe j1 tal que xj1 es un punto adherente a E luego tomamosC(2) = E ∪{xj1}. Ahora, para cada xk con k /∈ {i1, . . . , ir, j1}, consideramos la columnak-esima de la matriz topogenea y revisamos en dicha columna los elementos de las filasi1, . . . , ir, j1; si todos ellos son nulos, entonces C = C(2), de lo contrario, existe j2 tal quexj2 es un punto adherente a E, luego tomamos C(3) = E ∪ {xj1 , xj2}.
Procediendo de manera recursiva, seguimos anadiendo puntos hasta obtener un con-junto C(m) = E ∪
{xj1 , xj2 , . . . , xjm−1
}tal que C(m) = X, en cuyo caso el conjunto E
es denso en X, o C(m) es tal que para todo k /∈ {i1, . . . , ir, j1, . . . , jm−1}, la k-esimacolumna tiene las entradas i1, . . . , ir, j1, . . . , jm−1 nulas, en cuyo caso C = C(m).
Ejemplo 2.2.23. Encontremos la clausura de {x2, x4} respecto al espacio topologico Xcon matriz topogenea asociada
TX =
1 0 1 0 00 1 1 1 00 0 1 0 00 0 0 1 00 0 0 0 1
.
Tomemos inicialmente C(1) = {x2, x4}. Como la primera columna tiene ceros ensus filas 2 y 4, el elemento x1 no es anadido a C(1); la tercera columna tiene un unoen su segunda fila y por tanto hacemos C(2) = {x2, x3, x4}. Cada vez que anadimos unpunto, debemos revisar de nuevo aquellos elementos que habıamos descartado en el pasoanterior, en este caso el x1. La primera columna tiene ceros en sus filas 2, 3 y 4, luegox1 no es anadido a C(2), finalmente la quinta columna tiene ceros en sus filas 2, 3 y 4,por lo que x5 tampoco es anadido a C(2), y como hemos agotado todos los puntos delespacio, concluimos que la clausura de {x2, x4} es C = C(2) = {x2, x3, x4}.
Los comentarios anteriores permiten encontrar la clausura de un subconjunto arbi-trario mediante el siguiente algoritmo.

CAPITULO 2. MATRICES ASOCIADAS A UN ESPACIO FINITO 33
Algoritmo: Clausura de un subconjunto I ⊆ X
Entrada: Matriz topogenea TX = [tij]n×n asociada al espacio X y un subconjuntoI ⊆ X.
Salida: Clausura de I: c(I) = C.
1. Tomamos C = I y r = 1.
2. mientras r = 1
3. para xi /∈ C
4. si∑
xk∈C tik 6= 0 hacer C ← C ∪ {xi} y regresar al paso 3.
5. si i = max {j : xj /∈ C} hacer r = 0.
6. fin para
7. fin mientras
Observacion 2.2.24. En [9] se demuestra que la aplicacion
f : 2X −→ ZI −→ f(I) = |c(I)|
donde c es el operador de clausura asociado al espacio topologico finito (X,T ), es unpolimatroide que satisface f ∈ λ(NT ) luego, en particular, el anterior algoritmo permitedeterminar completamente la funcion f .
Ahora bien, tomemos nK = |c(K)| el cardinal de la clausura de K. En [9] se muestraque si FK = 2n − 2nK , la funcion de entropıa rA : 2X −→ R satisface
rA(I) = ln |A| − 2SI|A|
ln 2
donde
SI =∑
I⊆c(K)
FK
MI =∑
I*c(K)
FK
|A| = 2(MI + SI)
Podemos reeescribir SI y MI como sigue:

CAPITULO 2. MATRICES ASOCIADAS A UN ESPACIO FINITO 34
SI =∑
I⊆c(K)
FK =∑
I⊆c(K)
(2n − 2nK ) = 2n∑
I⊆c(K)
[1− 2nK−n
]=: 2nS∗I
MI =∑
I*c(K)
FK =∑
I*c(K)
(2n − 2nK ) = 2n∑
I*c(K)
[1− 2nK−n
]=: 2nM∗
I
Por lo que |A| = 2n+1(M∗I + S∗I ) y ası
rA(I) = ln |A| − 2SI|A|
ln 2
= ln(2n+1(M∗I + S∗I ))−
2n+1S∗I2n+1(M∗
I + S∗I )ln 2
= (n+ 1) ln 2 + ln(M∗I + S∗I )−
S∗I(M∗
I + S∗I )ln 2
= ln(M∗I + S∗I ) +
[n+
M∗I
M∗I + S∗I
]ln 2
Teniendo el algoritmo para encontrar la clausura de un subconjunto K, y por tantopara calcular los valores de nK , S∗I y M∗
I , podemos evaluar la funcion rA mediante elsiguiente algoritmo.
Algoritmo: Funcion de entropıa rA en un subconjunto I ⊆ X
Entrada: Matriz topogenea TX = [tij]n×n asociada al espacio X y un subconjuntoI ⊆ X.
Salida: Valor rA(I).
1. Tomamos M∗I = S∗I = 0.
2. para K ⊆ X
3. Calculamos nK = |c(K)|.
4. si I ⊆ c(K) hacer S∗I ← S∗I + 1− 2nK−n
de lo contrario M∗I ←M∗
I + 1− 2nK−n
5. fin para
6. Calculamos rA(I) = ln(M∗I + S∗I ) +
[n+
M∗IM∗I +S∗I
]ln 2

CAPITULO 2. MATRICES ASOCIADAS A UN ESPACIO FINITO 35
2.3. Matrices UX y DX
Sean (X,T ) un espacio topologico finito, U su base minimal y D la base minimalpara Xop, y consideremos la funcion submodular no decreciente f∆ : 2X −→ Z definidaen el capıtulo anterior. En [1] se demuestra que si B es un subconjunto del espacio Xentonces
fU(B) = |X| − |B5|fD(B) = |X| − |B4|
Aunque estas funciones fU y fD no pertenecen a λ(NT ), son importantes para des-cribir la topologıa del espacio, pues caracterizan la relacion de orden de la siguientemanera:
xi 6 xj ⇐⇒ fT op(xi) = fT op(xi, xj)⇐⇒ fD(xi) = fD(xi, xj) (2.4)
xi 6 xj ⇐⇒ fT (xj) = fT (xi, xj)⇐⇒ fU(xj) = fU(xi, xj) (2.5)
donde fT op ∈ λ(NT ) y fT ∈ λ(NT op).
Definicion 2.3.1. Dado X un espacio finito, definimos la matriz UX = [uij] asociadaa la funcion fU como uij = fU(xi, xj). Analogamente, definimos la matriz DX = [dij]asociada a la funcion fD como dij = fD(xi, xj).
Proposicion 2.3.2. Si TX es la matriz topogenea asociada al espacio finito X, entonces
UX = n1− TXTTX
DX = n1− TTXTX
Demostracion. Si E = {xi, xj}5, veamos que |E| =∑n
k=1 tiktjk: en efecto, tenemos lasequivalencias
xk ∈ E ⇐⇒ xi 6 xk y xj 6 xk ⇐⇒ tik = 1 y tjk = 1⇐⇒ tiktjk = 1,
luego cada xk ∈ E aporta un uno en la suma∑n
k=1 tiktjk, teniendo ası la igualdadrequerida. Ahora, si TXT
TX = [cij] entonces cij =
∑nk=1 tiktjk = |E| y ası
uij = fU(xi, xj) = |X| − |E| = n− cij = [n1− TXTTX ]ij.
Sea A = {xi, xj}4. Por un argumento similar al anterior, tenemos |A| =∑n
k=1 tkitkjde donde
dij = fD(xi, xj) = |X| − |A| = [n1− TTXTX ]ij. �
Ejemplo 2.3.3. Para el siguiente espacio T0

CAPITULO 2. MATRICES ASOCIADAS A UN ESPACIO FINITO 36
•x1•x2
•x3 •x4
•x5
•x6
TX =
1 0 0 1 1 10 1 1 1 1 10 0 1 0 0 00 0 0 1 1 10 0 0 0 1 10 0 0 0 0 1
las matrices UX y DX son las siguientes
UX =
2 3 6 3 4 53 1 5 3 4 56 5 5 6 6 63 3 6 3 4 54 4 6 4 4 55 5 6 5 5 5
DX =
5 6 6 5 5 56 5 5 5 5 56 5 4 5 5 55 5 5 3 3 35 5 5 3 2 25 5 5 3 2 1
Proposicion 2.3.4. Sean X un espacio finito y M = {xi1 , . . . , xim} ⊆ X, entonces
fU(M) = n−n∑r=1
(m∏k=1
tikr
)
fD(M) = n−n∑r=1
(m∏k=1
trik
)Demostracion.
xr ∈M5 ⇐⇒ xik 6 xr para todo k = 1, . . . ,m
⇐⇒ tikr = 1 para todo k = 1, . . . ,m
⇐⇒m∏k=1
tikr = 1
xr ∈M4 ⇐⇒ xr 6 xik para todo k = 1, . . . ,m
⇐⇒ trik = 1 para todo k = 1, . . . ,m
⇐⇒m∏k=1
trik = 1
Por lo tanto |M5| =n∑r=1
(m∏k=1
tikr
)y |M4| =
n∑r=1
(m∏k=1
trik
). �

CAPITULO 2. MATRICES ASOCIADAS A UN ESPACIO FINITO 37
La proposicion 2.3.2 permite obtener las matrices UX y DX a partir de la matriztopogenea TX . Veamos ahora el proceso inverso de obtener la matriz topogenea a partirde UX y a partir de DX . En nuestro lenguaje matricial, (2.4) y (2.5) equivalen a tener
tij = 1⇐⇒ ujj = uij ⇐⇒ dii = dij
Por lo tanto, podemos reconstruir la matriz topogenea por medio de los algoritmos:
Algoritmo: Matriz topogenea a partir de UX
Entrada: Matriz UX = [uij]n×n asociada a la funcion fU del espacio X.Salida: Matriz topogenea TX = [tij]n×n asociada al espacio X.
1. para i = 1 · · ·n
2. para j = 1 · · ·n
3. si i > j hacer tij = 0, de lo contrario
4. tij = δ(uij − ujj, 0)
5. fin para
6. fin para
Algoritmo: Matriz topogenea a partir de DX
Entrada: Matriz DX = [dij]n×n asociada a la funcion fD del espacio X.Salida: Matriz topogenea TX = [tij]n×n asociada al espacio X.
1. para i = 1 · · ·n
2. para j = 1 · · ·n
3. si i > j hacer tij = 0, de lo contrario
4. tij = δ(dij − dii, 0)
5. fin para
6. fin para

CAPITULO 2. MATRICES ASOCIADAS A UN ESPACIO FINITO 38
Observacion 2.3.5. De la proposicion 2.3.4 y los algoritmos anteriores, vemos que siM = {xi1 , . . . , xim} ⊆ X
fU(M) = n−n∑r=1
(m∏k=1
δ(fU(xr)− fU(xik , xr), 0)
)
fD(M) = n−n∑r=1
(m∏k=1
δ(fD(xik)− fD(xik , xr), 0)
)Por lo tanto, las funciones fU y fD pueden calcularse para cualquier subconjunto M , apartir de los valores de la funciones en los subconjuntos unitarios y de dos elementos.
Observacion 2.3.6. En general podemos expresar la funcion f∆ en terminos de los valoresde las funciones qJ en los conjuntos unitarios: si I ⊆ X, entonces
f∆(I) = |∆| −∑J∈∆
(∏x∈I
δ(qJ(x), 0)
).
El comportamiento de estas matrices en el producto cartesiano es el siguiente.
Proposicion 2.3.7. Sean TX y TY las matrices topogeneas asociadas a los espaciosfinitos X y Y , UX y UY las matrices asociadas a las funciones fUX y fUY respectivamente.Si |X| = n y |Y | = m entonces
UX×Y = (n1)⊗ UY + UX ⊗ (m1)− UX ⊗ UY .
Analogamente, si DX y DY son las matrices asociadas a las funciones fDX y fDY ,tenemos
DX×Y = (n1)⊗DY +DX ⊗ (m1)−DX ⊗DY .
Demostracion. Un sencillo calculo haciendo uso de las propiedades del producto deKronecker permite obtener el resultado:
UX×Y = nm1− (TX×Y )(TX×Y )T
= nm1− (TX ⊗ TY )(TX ⊗ TY )T
= (n1)⊗ (m1)− (TX ⊗ TY )(TTX ⊗ TT
Y )
= (n1)⊗ (m1)− (TXTTX)⊗ (TY T
TY )
= (n1)⊗ (m1)− (n1− UX)⊗ (m1− UY )
= (n1)⊗ UY + UX ⊗ (m1)− UX ⊗ UY
Como DX = UXop , aplicando lo anterior obtenemos la segunda parte del enunciado. �

CAPITULO 2. MATRICES ASOCIADAS A UN ESPACIO FINITO 39
2.4. Matriz de Stong
Stong en [11] considera la siguiente situacion. SeaM la coleccion de todas las matri-ces cuadradas [aij] con entradas de valor entero que satisfacen las siguientes propiedades:
(1) aii ∈ Z+.
(2) i 6= j ⇒ aij ∈ {−1, 0, 1}.
(3) i 6= j ⇒ aij = −aji.
(4) Para toda sucesion i1, i2, . . . , im, m > 2, de ındices distintos tal que aikik+1= 1 para
todo k = 1, . . . ,m− 1, se debe tener ai1im = 0.
Stong demuestra que M/ ∼, donde ∼ es la relacion de similaridad vıa permutacionentre matrices, se encuentra en correspondencia biunıvoca con HTop(X), el conjuntode las clases de equivalencia, bajo homeomorfismos, de los espacios topologicos finitos.La correspondencia es la siguiente: a la clase de equivalencia de un espacio finito X conbase minimal U , le asignamos la clase de la matriz A = [aij] definida por
aii es la cantidad de ındices k tales que Uk = Ui,
aij = −aji = 1, si Ui ⊂ Uj y no existe k tal que Ui ⊂ Uk ⊂ Uj,
aij = 0 en otro caso.
SiX es un espacio T0, es claro que la matriz A consta de unos en su diagonal. Ademas,tomando la numeracion propuesta en la observacion 2.2.10, podemos garantizar que
A = In +4−4T
donde 4 es una matriz triangular superior binaria con ceros en su diagonal. Estamosinteresados en matrices de la forma In +4, pues −4T aporta elementos negativos pordebajo de la diagonal cuya informacion es la misma que proporciona 4T (en el casodonde el espacio no es T0 es cuando los elementos negativos en la construccion de Stongjuegan un papel importante).
Definicion 2.4.1. Dado X un espacio T0, definimos la matriz de Stong SX = [sij] comola matriz cuadrada de tamano n× n que satisface
sij =
{1 , xi 6 xj y no existe k tal que xi < xk < xj
0 , en otro caso
Un metodo sencillo para calcular la matriz topogenea TX y la matriz de Stong SXdel espacio X, a partir del diagrama de Hasse asociado, se describe a continuacion.Numeramos los vertices del diagrama de manera tal que xi < xj =⇒ i < j, esto es,numeramos de abajo hacia arriba en el diagrama garantizando que la matriz topogeneasea triangular superior. Para cada i 6= j:
CAPITULO 2. MATRICES ASOCIADAS A UN ESPACIO FINITO 40
tij = 1 si, y solo si, existe una cadena con mınimo xi y maximo xj.
sij = 1 si, y solo si, (xi, xj) es una arista del diagrama.
Observacion 2.4.2. tij = 0⇒ sij = 0 y sij = 1⇒ tij = 1.
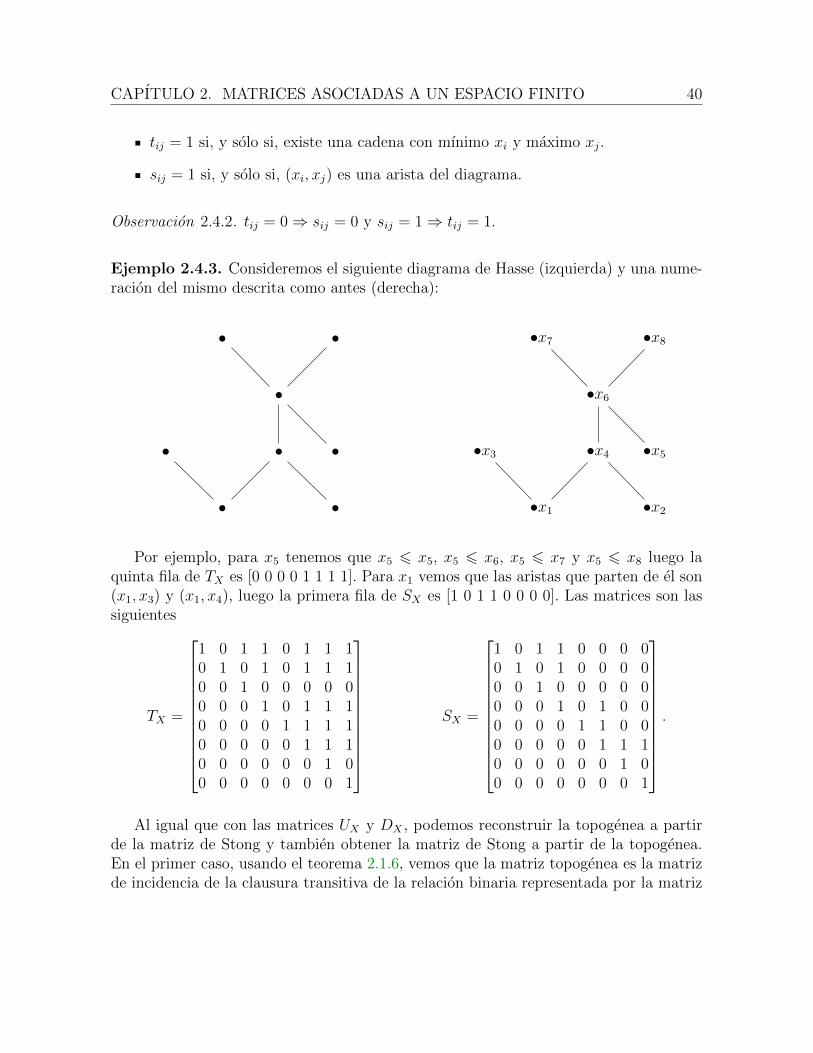
Ejemplo 2.4.3. Consideremos el siguiente diagrama de Hasse (izquierda) y una nume-racion del mismo descrita como antes (derecha):
• •
• • •
•
• •
•x1 •x2
•x3 •x4 •x5
•x6
•x7 •x8
Por ejemplo, para x5 tenemos que x5 6 x5, x5 6 x6, x5 6 x7 y x5 6 x8 luego laquinta fila de TX es [0 0 0 0 1 1 1 1]. Para x1 vemos que las aristas que parten de el son(x1, x3) y (x1, x4), luego la primera fila de SX es [1 0 1 1 0 0 0 0]. Las matrices son lassiguientes
TX =
1 0 1 1 0 1 1 10 1 0 1 0 1 1 10 0 1 0 0 0 0 00 0 0 1 0 1 1 10 0 0 0 1 1 1 10 0 0 0 0 1 1 10 0 0 0 0 0 1 00 0 0 0 0 0 0 1
SX =
1 0 1 1 0 0 0 00 1 0 1 0 0 0 00 0 1 0 0 0 0 00 0 0 1 0 1 0 00 0 0 0 1 1 0 00 0 0 0 0 1 1 10 0 0 0 0 0 1 00 0 0 0 0 0 0 1
.
Al igual que con las matrices UX y DX , podemos reconstruir la topogenea a partirde la matriz de Stong y tambien obtener la matriz de Stong a partir de la topogenea.En el primer caso, usando el teorema 2.1.6, vemos que la matriz topogenea es la matrizde incidencia de la clausura transitiva de la relacion binaria representada por la matriz

CAPITULO 2. MATRICES ASOCIADAS A UN ESPACIO FINITO 41
de Stong. Para la matriz del ejemplo 2.4.3
SX = [sij] =
1 0 1 1 0 0 0 00 1 0 1 0 0 0 00 0 1 0 0 0 0 00 0 0 1 0 1 0 00 0 0 0 1 1 0 00 0 0 0 0 1 1 10 0 0 0 0 0 1 00 0 0 0 0 0 0 1
vamos anadiendo unos en cada subdiagonal superior. La primera subdiagonal, que constade los elementos sk,k+1, 1 6 k 6 7, no se modifica pues si existiera k tal que sk,k+1 = 0 ytk,k+1 = 1, existirıa xj con xk < xj < xk+1, lo que no es posible pues la numeracion quehemos escogido en la observacion 2.2.10 implicarıa k < j < k+1, una contradiccion. Parala segunda subdiagonal, con elementos sk,k+2, 1 6 k 6 6, tenemos ceros en las entradass35 y s57. Como s56 = s67 = 1 entonces, t56 = t67 = 1 =⇒ t57 = 1 (teorema 2.1.6) y asıanadimos un uno en la entrada (5,7). En el caso de s35 = 0 no hay modificacion, puess34 = s45 = 0:
S(2)X = [s
(2)ij ] =
1 0 1 1 0 0 0 00 1 0 1 0 0 0 00 0 1 0 0 0 0 00 0 0 1 0 1 0 00 0 0 0 1 1 1 00 0 0 0 0 1 1 10 0 0 0 0 0 1 00 0 0 0 0 0 0 1
En la tercera subdiagonal, con elementos sk,k+3, 1 6 k 6 5, tenemos ceros en las
entradas s(2)25 , s
(2)36 , s
(2)47 y s
(2)58 . Por ejemplo, como s
(2)46 = s
(2)67 = 1 entonces t46 = t67 =
1 =⇒ t47 = 1, luego anadimos un uno en la entrada (4, 7). Similarmente para la entrada
(5, 8) pues s(2)56 = s
(2)68 = 1. La entrada (2, 5) no se modifica pues no existe k tal que
s(2)2k = s
(2)k5 = 1, y por la misma razon tampoco modificamos la entrada (3, 6):
S(3)X = [s
(3)ij ] =
1 0 1 1 0 0 0 00 1 0 1 0 0 0 00 0 1 0 0 0 0 00 0 0 1 0 1 1 00 0 0 0 1 1 1 10 0 0 0 0 1 1 10 0 0 0 0 0 1 00 0 0 0 0 0 0 1
Procediendo de manera similar para las siguientes subdiagonales, obtenemos las matricesS
(4)X , S
(5)X , S
(6)X y S
(7)X :

CAPITULO 2. MATRICES ASOCIADAS A UN ESPACIO FINITO 42
S(4)X = [s
(4)ij ] =
1 0 1 1 0 0 0 00 1 0 1 0 1 0 00 0 1 0 0 0 0 00 0 0 1 0 1 1 10 0 0 0 1 1 1 10 0 0 0 0 1 1 10 0 0 0 0 0 1 00 0 0 0 0 0 0 1
, S
(5)X = [s
(5)ij ] =
1 0 1 1 0 1 0 00 1 0 1 0 1 1 00 0 1 0 0 0 0 00 0 0 1 0 1 1 10 0 0 0 1 1 1 10 0 0 0 0 1 1 10 0 0 0 0 0 1 00 0 0 0 0 0 0 1
S(6)X = [s
(6)ij ] =
1 0 1 1 0 1 1 00 1 0 1 0 1 1 10 0 1 0 0 0 0 00 0 0 1 0 1 1 10 0 0 0 1 1 1 10 0 0 0 0 1 1 10 0 0 0 0 0 1 00 0 0 0 0 0 0 1
, S
(7)X = [s
(7)ij ] =
1 0 1 1 0 1 1 10 1 0 1 0 1 1 10 0 1 0 0 0 0 00 0 0 1 0 1 1 10 0 0 0 1 1 1 10 0 0 0 0 1 1 10 0 0 0 0 0 1 00 0 0 0 0 0 0 1
Como llegamos a la ultima subdiagonal superior, obtenemos la matriz topogenea
TX = S(7)X , lo que coincide con la matriz del ejemplo 2.4.3. El procedimiento anterior
puede aplicarse a cualquier espacio T0 finito X mediante el siguiente algoritmo.
Algoritmo: Matriz topogenea a partir de la matriz de Stong
Entrada: Matriz de Stong SX = [sij]n×n asociada al espacio T0 X.Salida: Matriz topogenea TX = [tij]n×n asociada al espacio T0 X.
1. si n = 1, 2 hacer T = S, de lo contrario
2. si j 6 i+ 1 o sij = 1 hacer tij = sij, de lo contrario
3. para j = 3 · · ·n
4. para cada elemento nulo si,i+j−1 en la j-esima subdiagonal superior
5. si existe r tal que sir = 1 = sr,i+j−1 hacer ti,i+j−1 = 1 de lo
contrario ti,i+j−1 = 0.
6. fin para
7. fin para
Revirtiendo el proceso anterior, obtenemos un algoritmo para encontrar la matriz deStong conociendo la topogenea.

CAPITULO 2. MATRICES ASOCIADAS A UN ESPACIO FINITO 43
Algoritmo: Matriz de Stong a partir de la matriz topogenea
Entrada: Matriz topogenea TX = [tij]n×n asociada al espacio T0 X.Salida: Matriz de Stong SX = [sij]n×n asociada al espacio T0 X.
1. para i = 1 · · ·n
2. para j = 1 · · ·n
3. si j 6 i+ 1 o tij = 0 hacer sij = tij, de lo contrario
4. si existe k entre i+ 1 y j − 1 tal que tik = 1 = tkj hacer sij = 0, de lo
contrario sij = 1
5. fin para
6. fin para
2.5. Matrices NT y NS
Definicion 2.5.1. Sean TX la matriz topogenea y SX la matriz de Stong asociadas alespacio T0 X. Definimos
NT = TX − InNS = SX − In
Observacion 2.5.2. Las matrices NT y NS son nilpotentes por ser matrices triangularessuperiores con diagonal nula.
Proposicion 2.5.3. Para cada 0 6 k 6 n − 1, la entrada [NkS ]ij representa el numero
de cadenas de exactamente k + 1 elementos con mınimo xi y maximo xj, tal que entrecada par de elementos consecutivos en cada cadena, no existe ningun otro elemento deX.
Demostracion. Probaremos el resultado por induccion sobre k. Si k = 0 entonces N0S =
In luego satisface la propiedad descrita, pues las unicas cadenas de un elemento sonformadas por un unico vertice. Supongamos que [Nk
S ]ij representa el numero de cadenascon la propiedad del enunciado. Entonces
Nk+1S = Nk
S(SX − In) = NkSSX −Nk
S ,

CAPITULO 2. MATRICES ASOCIADAS A UN ESPACIO FINITO 44
luego comparando componente a componente (no tenemos en cuenta en lo siguientecuando i = n o j = 1 pues la ultima fila y la primera columna son nulas):
[Nk+1S ]ij =
n∑r=1
[NkS ]irsrj − [Nk
S ]ij =n∑r=1r 6=j
[NkS ]irsrj
Un sumando es no nulo cuando [NkS ]ir > 0 y srj = 1, es decir, cuando existen cadenas
de k + 1 elementos con mınimo xi y maximo xr, tales que entre cada par de elementosconsecutivos en cada cadena no existe ningun otro elemento, y xr < xj donde no existexl tal que xr < xl < xj.
•xi
• • • •
• •xr •
•xj
Por lo tanto, por cada xr con estas condiciones, podemos formar [NkS ]ij cadenas
distintas de k+2 elementos (anadimos xr en cada cadena) con la propiedad del enunciadoy ası, al hacer la suma obtenemos el total de tales cadenas que es precisamente [Nk+1
S ]ij.�
Proposicion 2.5.4. Para cada 0 6 k 6 n − 1, la entrada [NkT ]ij representa el numero
de cadenas de k + 1 elementos con mınimo xi y maximo xj.
Demostracion. De nuevo probaremos el resultado por induccion sobre k. Si k = 0 en-tonces N0
T = In, luego satisface la propiedad descrita, pues las unicas cadenas de unelemento se forman con un unico vertice. Supongamos que [Nk
T ]ij representa el numerode cadenas de k + 1 elementos con mınimo xi y maximo xj. Entonces
Nk+1T = Nk
T (TX − In) = NkTTX −Nk
T ,
luego comparando componente a componente (no tenemos en cuenta en lo siguientecuando i = n o j = 1 pues la ultima fila y la primera columna son nulas):
[Nk+1T ]ij =
n∑r=1
[NkT ]irtrj − [Nk
T ]ij =n∑r=1r 6=j
[NkT ]irtrj
Un sumando distinto de cero satisface [NkT ]ir > 0 y trj = 1, es decir, existen cadenas de
k + 1 elementos con mınimo xi y maximo xr y tambien xr < xj.

CAPITULO 2. MATRICES ASOCIADAS A UN ESPACIO FINITO 45
•xi
• • • •
• • •
•xj
•xr
Luego por cada xr con estas condiciones, podemos formar [NkT ]ir cadenas de k + 2
elementos (anadimos xr en cada cadena) con mınimo xi y maximo xj y ası al sumarobtenemos precisamente [Nk+1
T ]ij. �
Observacion 2.5.5. SX 6 TX y NS 6 NT .
Corolario 2.5.6. La altura h(X) del espacio T0 X satisface
h(X) = mın{k : Nk
S = On
}= mın
{k : Nk
T = On
}.
Demostracion. Sean MS = mın{k : Nk
S = On
}y MT = mın
{k : Nk
T = On
}. Entonces
Nh(X)S = On = N
h(X)T pues de lo contrario, existirıan cadenas enX de h(X)+1 elementos,
lo que no es posible por la definicion de altura de un espacio. Luego MS 6 h(X) y MT 6h(X). Ademas, si existieran cadenas de MS+1 o MT +1 elementos, entonces [NMS
S ]ij > 0o [NMT
T ]ij > 0 para algun par (i, j), lo que es absurdo pues NMSS = On = NMT
T . Por lotanto MS + 1 > h(X) y MT + 1 > h(X) de donde MS > h(X) y MT > h(X). �
Corolario 2.5.7. La altura h(xj) del elemento xj ∈ X satisface
h(xj) = mın{k : [Nk
S ]•j = O}
= mın{k : [Nk
T ]•j = O}
Demostracion. Denotemos MS = mın{k : [Nk
S ]•j = O}
y MT = mın{k : [Nk
T ]•j = O}
.
Entonces [Nh(xj)S ]•j = O = [N
h(xj)T ]•j pues de lo contrario, existirıan cadenas de h(xj)+1
elementos con maximo xj, lo que no es posible por la definicion de altura de un elemento.Luego MS 6 h(xj) y MT 6 h(xj). Ademas, si existieran cadenas de MS + 1 o MT + 1elementos con maximo xj entonces [NMS
S ]ij > 0 o [NMTT ]ij > 0 para algun i, lo que es
absurdo pues [NMSS ]•j = O = [NMT
T ]•j. Por lo tanto MS + 1 > h(xj) y MT + 1 > h(xj)de donde MS > h(xj) y MT > h(xj). �

CAPITULO 2. MATRICES ASOCIADAS A UN ESPACIO FINITO 46
Corolario 2.5.8. Si k = h(X)− 1 entonces NkS = Nk
T .
Demostracion. Por la observacion 2.5.5 tenemos que [NkS ]ij 6 [Nk
T ]ij. Supongamos[Nk
S ]ij < [NkT ]ij, entonces existe una cadena de k + 1 = h(X) elementos con mınimo
xi y maximo xj:xi = xi1 < xi2 < · · · < xih(X)
= xj
en la que existe r tal que xir < xir+1 y (xir , xir+1) no es una arista, luego existe x talque xir < x < xir+1 . Por lo tanto podemos formar la cadena
xi = xi1 < xi2 < · · · < xir < x < xir+1 < · · · < xih(X)= xj
que tiene h(X) + 1 elementos, lo que contradice la maximalidad de h(X). Ası debemostener [Nk
S ]ij = [NkT ]ij para todo i, j ∈ In. �
Corolario 2.5.9. Si k = h(xj)− 1 entonces [NkS ]•j = [Nk
T ]•j.
Demostracion. El argumento es similar al del corolario 2.5.8. Basta fijar j y cambiarh(X) por h(xj). �
Ejemplo 2.5.10. Consideremos el siguiente diagrama de Hasse y calculemos las matri-ces Nk
S y NkT :
•x1 •x2
•x3
•x4
•x5
•x6 •x7 •x8
•x9
Las matrices SX y NkS son:
SX =
1 0 1 0 0 0 0 0 00 1 1 1 0 0 0 0 00 0 1 0 1 0 0 0 00 0 0 1 0 0 1 0 00 0 0 0 1 1 1 0 00 0 0 0 0 1 0 0 00 0 0 0 0 0 1 0 10 0 0 0 0 0 0 1 10 0 0 0 0 0 0 0 1
NS =
0 0 1 0 0 0 0 0 00 0 1 1 0 0 0 0 00 0 0 0 1 0 0 0 00 0 0 0 0 0 1 0 00 0 0 0 0 1 1 0 00 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 10 0 0 0 0 0 0 0 10 0 0 0 0 0 0 0 0
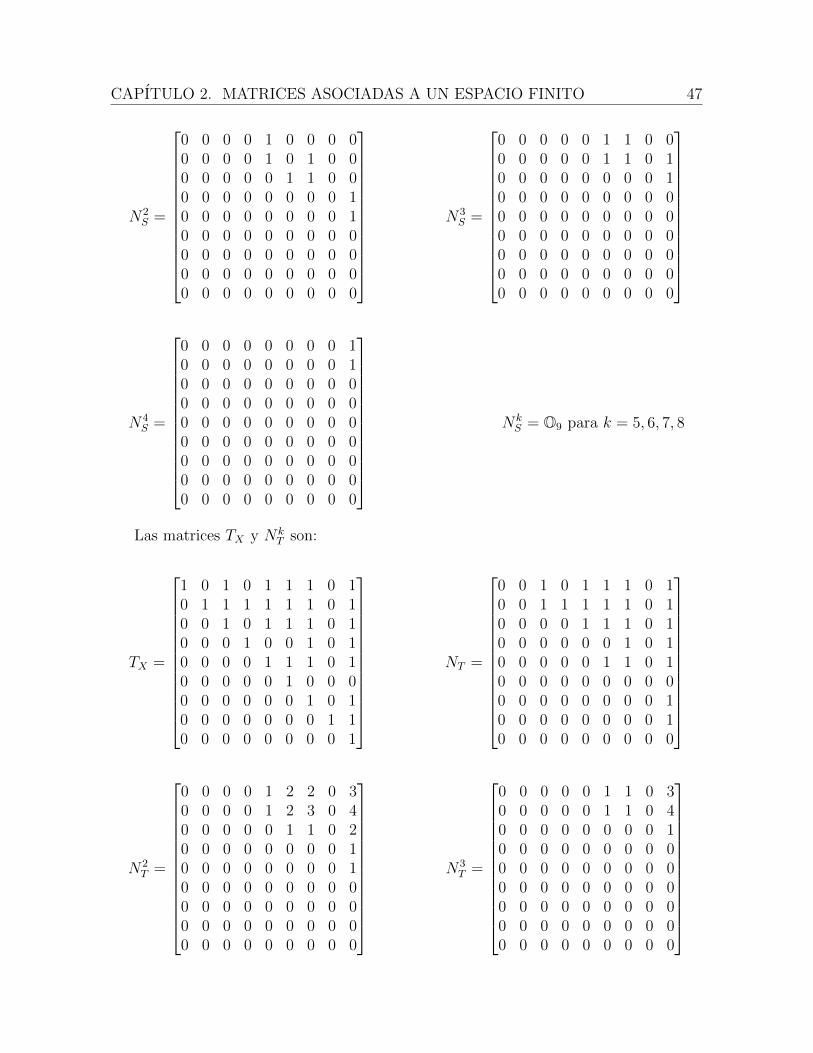
CAPITULO 2. MATRICES ASOCIADAS A UN ESPACIO FINITO 47
N2S =
0 0 0 0 1 0 0 0 00 0 0 0 1 0 1 0 00 0 0 0 0 1 1 0 00 0 0 0 0 0 0 0 10 0 0 0 0 0 0 0 10 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0
N3S =
0 0 0 0 0 1 1 0 00 0 0 0 0 1 1 0 10 0 0 0 0 0 0 0 10 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0
N4S =
0 0 0 0 0 0 0 0 10 0 0 0 0 0 0 0 10 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0
NkS = O9 para k = 5, 6, 7, 8
Las matrices TX y NkT son:
TX =
1 0 1 0 1 1 1 0 10 1 1 1 1 1 1 0 10 0 1 0 1 1 1 0 10 0 0 1 0 0 1 0 10 0 0 0 1 1 1 0 10 0 0 0 0 1 0 0 00 0 0 0 0 0 1 0 10 0 0 0 0 0 0 1 10 0 0 0 0 0 0 0 1
NT =
0 0 1 0 1 1 1 0 10 0 1 1 1 1 1 0 10 0 0 0 1 1 1 0 10 0 0 0 0 0 1 0 10 0 0 0 0 1 1 0 10 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 10 0 0 0 0 0 0 0 10 0 0 0 0 0 0 0 0
N2T =
0 0 0 0 1 2 2 0 30 0 0 0 1 2 3 0 40 0 0 0 0 1 1 0 20 0 0 0 0 0 0 0 10 0 0 0 0 0 0 0 10 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0
N3T =
0 0 0 0 0 1 1 0 30 0 0 0 0 1 1 0 40 0 0 0 0 0 0 0 10 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0

CAPITULO 2. MATRICES ASOCIADAS A UN ESPACIO FINITO 48
N4T =
0 0 0 0 0 0 0 0 10 0 0 0 0 0 0 0 10 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0
NkT = O9 para k = 5, 6, 7, 8
Vemos que la altura del espacio es 5 por medio de la cadena x1 < x3 < x5 < x7 < x9 ox2 < x3 < x5 < x7 < x9, lo que se refleja en las entradas (1, 9) y (2, 9) de las matricesN4S y N4
T . Ademas, por ejemplo, la altura de x7 es 4 pues la columna 7 en las matricesN3S y N3
T no es nula, pero si lo es en N4S y N4
T .

CAPITULO 2. MATRICES ASOCIADAS A UN ESPACIO FINITO 49
Terminamos este capıtulo con los siguientes comentarios. En la seccion 2.2 descri-bimos un metodo sencillo para calcular la matriz de permutacion Pσ, que nos per-mite transformar un espacio topologico T0 X con matriz topogenea TX arbitraria, enun espacio homeomorfo X cuya matriz topogenea TX es triangular superior, dondeTX = PT
σ TXPσ. De la misma manera, si SX , UX , DX , NS y NT son las matrices asocia-das al espacio X como se definieron en este capıtulo, las matrices asociadas al espacioX estan dadas por:
SX = PTσ SXPσ,
UX = PTσ UXPσ,
DX = PTσ DXPσ,
NS = PTσ NSPσ,
NT = PTσ NTPσ.
Esto refuerza nuestra decision de trabajar con matrices topogeneas triangulares su-periores, pues son mas sencillas de manipular para realizar calculos y demostracionesy permiten recuperar las matrices originales del espacio facilmente por medio de lasformulas anteriores.

Capıtulo 3
Topologıa algebraica desde unenfoque matricial
Mostraremos que a partir de las matrices definidas en el capıtulo 2, se pueden abordardistintos topicos de la topologıa algebraica en espacios finitos, como el calculo del core decualquier espacio topologico finito e incluso obtener las representaciones matriciales delos operadores de borde, que permiten encontrar los grupos de homologıa con coeficientesen F = {0, 1}, de un complejo simplicial finito arbitrario.
3.1. Metodos de reduccion puntual
Stong en [11] muestra que en un espacio finito X es posible eliminar algunos puntosespeciales, denominados por Peter May como beat points, de tal suerte que obtenemosun espacio mas pequeno que el original, y que resulta ser homotopicamente equivalentea X, en otras palabras, la eliminacion de beat points no altera el tipo de homotopıa deun espacio topologico finito.
Barmak en [3] demuestra que la eliminacion de weak points en un espacio finitopermite encontrar un espacio finito mas pequeno, con el mismo tipo de homotopıa debildel original.
En esta seccion vamos a definir dichos puntos y a encontrar un procedimiento parasu identificacion, por medio de las matrices definidas en el capıtulo anterior.
Definicion 3.1.1. Sea X un espacio T0. Decimos que un elemento xk es un up beatpoint (ubp), si existe xi tal que xk < xi y ademas se cumple xk < xj ⇒ xi 6 xj, paratodo xj ∈ X. Decimos que xk es un down beat point (dbp), si existe xi tal que xi < xk yademas satisface xj < xk ⇒ xj 6 xi, para todo xj ∈ X. Un elemento xk que es un ubpo dbp se dice simplemente beat point (bp).
51

CAPITULO 3. TOPOLOGIA ALGEBRAICA 52
Observacion 3.1.2. xk es un ubp de X si, y solo si, xk es un dbp de Xop.
Observacion 3.1.3. En [11], Stong usa los terminos linear point para referirse a un upbeat point y colinear point para un down beat point.
En el diagrama de Hasse asociado a X, podemos identificar los beat points de lasiguiente manera: xk es un ubp si, y solo si, existe una unica arista con xk como puntoinicial; por otra parte, xk es un dbp si, y solo si, existe una unica arista con xk comopunto final. Ası mismo, podemos encontrar los bp de un espacio haciendo uso de sumatriz de Stong, como lo muestra el siguiente resultado.
Proposicion 3.1.4. Sea X un espacio T0 con matriz de Stong asociada SX = [sij],
un punto xk es un ubp si, y solo si,n∑j=1
skj = 2. Un punto xk es un dbp si, y solo si,
n∑i=1
sik = 2.
Demostracion. Si xk es un ubp, existe un unico elemento xl tal que (xk, xl) es una aristaen el diagrama de Hasse, entonces skl = 1, skk = 1 y skh = 0 para todo h 6= k, l y por
tanton∑j=1
skj = skl + skk = 2.
Recıprocamente, supongamos que el ındice k satisfacen∑j=1
skj = 2. Cada termino en
la sumatorıa toma su valor en {0, 1}, luego solamente dos de esos terminos deben seriguales a uno; como skk = 1, debe existir un unico l 6= k con skl = 1, esto es, un unicoelemento xl tal que (xk, xl) es una arista del diagrama de Hasse y por lo tanto xk es unubp. La segunda parte del enunciado se obtiene de la anterior cambiando X por Xop yusando la observacion 3.1.2. �
Ejemplo 3.1.5. Identifiquemos los beat points del siguiente espacio usando su matrizde Stong:
•x1 •x2
•x3 •x4
•x5 •x6
•x7
SX =
1 0 1 0 0 0 00 1 1 1 0 0 00 0 1 0 1 0 00 0 0 1 0 0 00 0 0 0 1 0 10 0 0 0 0 1 10 0 0 0 0 0 1

CAPITULO 3. TOPOLOGIA ALGEBRAICA 53
Los puntos x1, x3, x5 y x6 son los ubp del espacio, puesto que la suma de las entradas encada fila respectiva es igual a 2. Los dbp del espacio son x4 y x5 como puede verificarsesumando las entradas de cada columna en la matriz de Stong, coincidiendo efectivamentecon los bp observados en el diagrama de Hasse.
Definicion 3.1.6. Un espacio topologico finito X (con punto de base xp) es un espaciominimal, si no tiene beat points (excepto posiblemente xp). El core de un espacio finitoX (con punto de base xp), es un retracto por deformacion fuerte de X (con el mismopunto de base) que es ademas un espacio minimal.
Lo interesante de los beat points es que si x ∈ X es uno de estos puntos, entoncesX \{x} es un retracto por deformacion fuerte de X, luego podemos encontrar el core deun espacio eliminando uno a uno sus bp [11]. El siguiente es el teorema de clasificacion,el cual nos permite afirmar que el core de un espacio X es el espacio mas pequenohomotopicamente equivalente a X.
Teorema 3.1.7. [11] Una equivalencia homotopica entre espacios minimales es un ho-meomorfismo. En particular, el core de un espacio es unico salvo homeomorfismo y dosespacios son homotopicamente equivalentes si, y solo si, tienen cores homeomorfos.
Ejemplo 3.1.8. Ilustremos como encontrar el core del siguiente espacio, modificandola matriz topogenea en cada paso.
•x1 •x2 •x3
•x4 •x5 •x6
•x7
TX =
1 0 0 1 0 0 00 1 0 1 1 0 10 0 1 1 1 1 10 0 0 1 0 0 00 0 0 0 1 0 10 0 0 0 0 1 10 0 0 0 0 0 1
Eliminamos la primera fila y la primera columna de la matriz, pues x1 es un ubp:
•x2 •x3
•x4 •x5 •x6
•x7 1 0 1 1 0 10 1 1 1 1 10 0 1 0 0 00 0 0 1 0 10 0 0 0 1 10 0 0 0 0 1

CAPITULO 3. TOPOLOGIA ALGEBRAICA 54
Eliminamos la fila y columna 5 de la ultima matriz, que representan el punto x6, ya queeste es un ubp (y un dbp):
•x2 •x3
•x4 •x5
•x7 1 0 1 1 10 1 1 1 10 0 1 0 00 0 0 1 10 0 0 0 1
Finalmente, eliminamos la fila y columna 6 de la ultima matriz, que representan al puntox7, por ser un dbp y este es el ultimo beat point del espacio como puede verificarse:
•x2 •x3
•x4 •x5 1 0 1 10 1 1 10 0 1 00 0 0 1
.
Aunque no existe un procedimiento canonico de eliminacion de beat points en unespacio T0, proponemos el siguiente algoritmo que permite encontrar una matriz to-pogenea asociada al core, eliminando algunas filas y columnas de la matriz TX asociadaal espacio original.
Algoritmo: Matriz topogenea del core de X a partir de la matriztopogenea de X
Entrada: Matriz topogenea TX = [tij]n×n asociada al espacio X.Salida: Matriz topogenea CX = [cij] asociada al core de X.
1. Tomamos r = 0.
2. mientras r = 0
3. Calcular la matriz de Stong SX de TX .
4. si existe k tal quen∑j=1
skj = 2 (ubp) on∑i=1
sik = 2 (dbp) hacer TX ← matriz
obtenida al eliminar la fila y la columna k de TX , y regresar al paso 2 de locontrario r = 1.
5. fin mientras

CAPITULO 3. TOPOLOGIA ALGEBRAICA 55
6. CX ← TX
Definicion 3.1.9. Sean X un espacio finito T0, U = {U1, . . . , Un} su base minimal yD = {D1, . . . , Dn} la base minimal de Xop. Dado x ∈ X definimos la estrella de x por
Cx = Ux ∪Dx y el enlace de x por Cx = Cx \ {x}.
Definicion 3.1.10. Un punto x ∈ X es un weak point, si su enlace Cx es contractil.
Observacion 3.1.11. En [3] se prueba que Cx es contractil si, y solo si, Ux\{x} o Dx\{x}es contractil. Sabemos que x es un beat point si Ux \ {x} tiene maximo o Dx \ {x} tienemınimo, luego alguno de los dos conjuntos es contractil. Por lo tanto, todo beat pointes tambien un weak point.
Proposicion 3.1.12. [3] Sea x un weak point de un espacio X. Entonces la inclusionı : X \ {x} ↪→ X es una equivalencia homotopica debil.
Por el teorema 3.1.7 sabemos que un espacio es contractil si, y solo si, su core esun punto, luego podemos aplicar el algoritmo anterior para determinar el core de losconjuntos Cx y obtener los weak points.
Algoritmo: Determinacion de un weak point en un espacio usando lamatriz topogenea.
Entrada: Matriz topogenea TX = [tij]n×n asociada al espacio X y un punto xk ∈ X.Salida: Valor R, que determina si xk es un weak point (R = 1) o no (R = 0).
1. Calcular la matriz topogenea TCxkde la topologıa heredada a Cxk .
2. Aplicar el algoritmo anterior para calcular el core C de la matriz TCxk.
3. si C = [1] hacer R = 1 de lo contrario R = 0.
Ejemplo 3.1.13. Determinemos si el punto x10 en el siguiente espacio es o no un weakpoint.

CAPITULO 3. TOPOLOGIA ALGEBRAICA 56
•x1 •x2 •x3
•x4 •x5 •x6 •x7
•x8 •x9 •x10 •x11
TX =
1 0 0 1 1 0 0 1 1 1 00 1 0 1 1 1 1 1 1 1 10 0 1 0 0 1 1 0 1 1 10 0 0 1 0 0 0 1 1 0 00 0 0 0 1 0 0 1 0 1 00 0 0 0 0 1 0 0 1 0 10 0 0 0 0 0 1 0 0 1 10 0 0 0 0 0 0 1 0 0 00 0 0 0 0 0 0 0 1 0 00 0 0 0 0 0 0 0 0 1 00 0 0 0 0 0 0 0 0 0 1
Para identificar Cx10 , basta con determinar en la matriz cuales de las entradas en la
fila y la columna 10 no son nulas, distintas a la entrada de la diagonal. En nuestro caso,los unos se encuentran en las filas 1, 2, 3, 5 y 7 luego la matriz topogenea de Cx10 es lamatriz obtenida de TX al eliminar las filas y columnas 4, 6, 8, 9, 10 y 11:
TCx10=
1 0 0 1 00 1 0 1 10 0 1 0 10 0 0 1 00 0 0 0 1
= SCx10
El core de esta matriz es C = [1], como puede verificarse realizando las eliminacionesrespectivas de filas y columnas, luego x10 es en efecto un weak point de X.
3.2. Modelos minimales finitos
Definicion 3.2.1. Sea Y un espacio topologico arbitrario (no necesariamente finito).Decimos que X es un modelo finito de Y , si es un espacio topologico finito debilmentehomotopicamente equivalente a Y . Decimos que X es un modelo minimal finito de Y ,si es un modelo finito de menor cardinalidad.
Definicion 3.2.2. Sea X un espacio T0. La suspension SX, es el espacio X ∪ {+,−}cuyos abiertos son los abiertos deX junto conX∪{+},X∪{−} yX∪{+,−}. Escribimosde manera recursiva SnX := S(Sn−1X) para n > 1. Notese que SX = X ⊕ {+,−}.
La suspension nos permitira encontrar la matriz topogenea de un modelo minimalfinito para la esfera n-dimensional. Para ello usaremos el siguiente resultado que es unaconsecuencia inmediata de la proposicion 2.2.22 del capıtulo anterior.

CAPITULO 3. TOPOLOGIA ALGEBRAICA 57
Proposicion 3.2.3. Si TX es la matriz topogenea asociada a un espacio T0 X, la matrizasociada a la suspension SX esta dada por:
TSX =
[TX 1n×2
O2×n I2
].
Proposicion 3.2.4. Si UX es la matriz asociada a la funcion fU del espacio T0 X,entonces la matriz USX satisface:
USX =
[UX (n+ 1)1n×2
(n+ 1)12×n (n+ 2)12×2 − I2
].
Demostracion. Eliminamos los subındices que indican la dimension de cada matriz,teniendo en cuenta que las particiones tienen sentido para las correctas operacionesentre las matrices. Haciendo uso de las proposiciones 2.3.7 y 3.2.3 tenemos:
USX = (n+ 2)1− TSXTTSX
=
[(n+ 2)1 (n+ 2)1(n+ 2)1 (n+ 2)1
]−[TX 1O I2
] [TTX O1 I2
]=
[(n+ 2)1 (n+ 2)1(n+ 2)1 (n+ 2)1
]−[TXT
TX + 21 11 I2
]=
[n1− TXTT
X (n+ 1)1(n+ 1)1 (n+ 2)1− I2
]=
[UX (n+ 1)1
(n+ 1)1 (n+ 2)1− I2
].
�
En [3] se prueba el siguiente resultado inspirado en el trabajo [7] de McCord.
Corolario 3.2.5. Cualquier espacio con grupos de homotopıa isomorfos a los de laesfera n-dimensional Sn, tiene al menos 2n + 2 puntos. Mas aun, SnS0 es el unicoespacio con 2n+ 2 puntos con esta propiedad.
De lo anterior es claro que la esfera n-dimensional tiene un unico modelo minimalfinito, que podemos representar por una matriz topogenea como se expresa en el siguientecorolario.
Corolario 3.2.6. Si Sn es la matriz topogenea asociada al unico modelo minimal parala esfera Sn, entonces se cumple la siguiente formula recursiva:
Sn+1 =
[Sn 1(2n+2)×2
O2×(2n+2) S0
].

CAPITULO 3. TOPOLOGIA ALGEBRAICA 58
Demostracion. Basta aplicar la proposicion 3.2.3 con X = Sn y donde S0 = I2 ySX = Sn+1. �
Ilustramos a continuacion los modelos minimales finitos de las esferas S0, S1 y S2
junto con sus matrices topogeneas respectivas:
• •[1 00 1
]
• •
• • 1 0 1 10 1 1 10 0 1 00 0 0 1
• •
• •
• • 1 0 1 1 1 10 1 1 1 1 10 0 1 0 1 10 0 0 1 1 10 0 0 0 1 00 0 0 0 0 1
Para el toro S1×S1 tenemos el modelo finito S1⊗ S1. Sin embargo, aun se encuentraabierta la pregunta: ¿es un modelo minimal finito?
•x1 •x2
•x3 •x4
•x5 •x6
•x7 •x8•x9 •x10
•x11 •x12
•x13 •x14
•x15 •x16

CAPITULO 3. TOPOLOGIA ALGEBRAICA 59
1 0 1 1 0 0 0 0 1 0 1 1 1 0 1 10 1 1 1 0 0 0 0 0 1 1 1 0 1 1 10 0 1 0 0 0 0 0 0 0 1 0 0 0 1 00 0 0 1 0 0 0 0 0 0 0 1 0 0 0 10 0 0 0 1 0 1 1 1 0 1 1 1 0 1 10 0 0 0 0 1 1 1 0 1 1 1 0 1 1 10 0 0 0 0 0 1 0 0 0 1 0 0 0 1 00 0 0 0 0 0 0 1 0 0 0 1 0 0 0 10 0 0 0 0 0 0 0 1 0 1 1 0 0 0 00 0 0 0 0 0 0 0 0 1 1 1 0 0 0 00 0 0 0 0 0 0 0 0 0 1 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 1 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 1 0 1 10 0 0 0 0 0 0 0 0 0 0 0 0 1 1 10 0 0 0 0 0 0 0 0 0 0 0 0 0 1 00 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1
3.3. Caracterıstica de Euler-Poincare
Definicion 3.3.1. Sean X un espacio T0 y C(X) el conjunto de todas las cadenas novacıas de X. Definimos la caracterıstica de Euler-Poincare de X como:
χ(X) =∑
C∈C(X)
(−1)|C|+1.
El siguiente teorema permite calcular la caracterıstica de Euler-Poincare de un es-pacio a partir de la matriz nilpotente NT , definida en el capıtulo anterior.
Teorema 3.3.2. La caracterıstica de Euler-Poincare de un espacio T0 X satisface:
χ(X) =
h(X)∑k=1
(−1)k−1sum(Nk−1T ).
Demostracion. Si denotamos por Ck(X) ⊆ C(X) al conjunto de cadenas de k elementosen X, entonces
χ(X) =∑
C∈C(X)
(−1)|C|+1 =
h(X)∑k=1
(−1)k−1|Ck(X)|,
luego basta con ver que |Ck(X)| = sum(Nk−1T ), lo cual es cierto por la proposicion 2.5.4
del capıtulo anterior. �

CAPITULO 3. TOPOLOGIA ALGEBRAICA 60
Ejemplo 3.3.3. Calculemos la caracterıstica de Euler-Poincare de la esfera n-dimensional.Para esto usaremos la matriz Sn del modelo minimal encontrada en el corolario 3.2.6.Denotando por Nn := Sn − I2n+2 tenemos:
Nn+1 =
[Nn 1O O
]=⇒ Nk
n+1 =
[Nkn Nk−1
n 1O O
]de donde sum(Nk
n+1) = sum(Nkn) + sum(Nk−1
n 1) = sum(Nkn) + 2 · sum(Nk−1
n ), para cadak ∈ Z+, pues la matriz 1 en este caso es de tamano (2n+ 2)× 2. Entonces,
χ(Sn+1) =2n+4∑k=1
(−1)k−1sum(Nk−1n+1)
= sum(I2n+4) +2n+4∑k=2
(−1)k−1sum(Nk−1n+1)
= 2 + sum(I2n+2) +2n+4∑k=2
(−1)k−1[sum(Nk−1n ) + 2 · sum(Nk−2
n )]
= 2 + sum(I2n+2) +2n+4∑k=2
(−1)k−1sum(Nk−1n )− 2
2n+4∑k=2
(−1)k−2sum(Nk−2n )
= 2 + χ(Sn)− 2χ(Sn)
= 2− χ(Sn)
Como χ(S0) = 2 y χ(Sn) = χ(Sn) de lo anterior concluimos que:
χ(Sn) =
{2 , n es par
0 , n es impar
Proposicion 3.3.4. Si X1, . . . , Xm son las componentes arco-conexas de un espacio T0
X entonces,
χ(X) =m∑r=1
χ(Xr).
Demostracion. Por la proposicion 2.2.18 del capıtulo anterior, sabemos que la matriztopogenea TX es similar vıa permutacion a la suma directa de las matrices topogeneasde las componentes arco-conexas, que las vamos a suponer triangulares superiores, luegopara todo k ∈ Z+ se cumple:
TX = PTσ TXPσ =
TX1 0 . . . 0
0 TX2
. . ....
.... . . . . . 0
0 . . . 0 TXm
=⇒ Nk−1
T =
Nk−1T1
0 . . . 0
0 Nk−1T2
. . ....
.... . . . . . 0
0 . . . 0 Nk−1Tm
.

CAPITULO 3. TOPOLOGIA ALGEBRAICA 61
Teniendo en cuenta que h(X) = maxr{h(Xr)} y recordando el corolario 2.5.6 del capıtulo
anterior,
χ(X) =
h(X)∑k=1
(−1)k−1sum(Nk−1
T )
=
h(X)∑k=1
(−1)k−1
m∑r=1
sum(Nk−1Tr
)
=m∑r=1
h(X)∑k=1
(−1)k−1sum(Nk−1Tr
)
=m∑r=1
h(Xr)∑k=1
(−1)k−1sum(Nk−1Tr
)
=m∑r=1
χ(Xr)
�
Finalizamos esta seccion calculando la matriz topogenea asociada a un bouquet den circunferencias
∨ni=1 S
1, cuando n es un cuadrado. Para tal fin tenemos en cuenta elsiguiente resultado.
Teorema 3.3.5. [4] Un espacio X es un modelo minimal finito de∨ni=1 S
1 si, y solo si,h(X) = 2, |X| = mın {i+ j | (i− 1)(j − 1) > n} y |E(H(X))| = |X|+ n− 1.
Ademas, en [4] se prueba que un bouquet de n circunferencias tiene un unico modelominimal finito si, y solo si, n es un cuadrado. Para encontrar la matriz topogenea dedicho modelo unico, necesitamos lo siguiente.
Lema 3.3.6. Dado un espacio T0 X, h(X) 6 2 si, y solo si, TX = SX . Ademas h(X) = 2si, y solo si, TX 6= In y TX = SX .
Demostracion. Si h(X) 6 2, entonces por el corolario 2.5.8 tenemos NT = NS y asıTX = SX . Recıprocamente, si TX = SX todas las cadenas en X tienen cardinal menor oigual a 2, luego h(X) 6 2. �
Proposicion 3.3.7. Si n = m2, m ∈ Z+, el unico modelo minimal finito X paran∨i=1
S1
tiene como matriz topogenea asociada:
TX =
[Im+1 1m+1
Om+1 Im+1
]. (3.1)

CAPITULO 3. TOPOLOGIA ALGEBRAICA 62
Demostracion. Basta con probar que el espacio asociado a la matriz (3.1) satisface lashipotesis del teorema 3.3.5. Como TX = SX , entonces h(X) = 2. Ahora bien, pordefinicion, sabemos que la caracterıstica de Euler-Poincare de un espacio de altura 2satisface χ(X) = |X| − |E(H(X))|, luego usando el teorema 3.3.2 tenemos:
|X| − |E(H(X))| = sum(I2m+2)− sum(NT ) = 2m+ 2− (m+ 1)2 = 1−m2 = 1− n
y ası |E(H(X))| = |X|+ n− 1. Finalmente, no es dificil ver que
mın{i+ j | (i− 1)(j − 1) > m2
}= 2(m+ 1),
valor que coincide con el tamano de la matriz TX . �
3.4. Grupo fundamental
En [3], Barmak construye el grupo H (X, xm) a partir del diagrama de Hasse aso-ciado a un espacio topologico finito T0, con el cual describe el grupo fundamental dehomotopıa de dicho espacio. En esta seccion, veremos que tambien podemos caracterizarel grupo fundamental a traves de la matriz topogenea.
Citaremos a continuacion una serie de definiciones y resultados que se encuentranen [3], y que nos permitiran encontrar la caracterizacion que buscamos.
Definicion 3.4.1. Sea (X, xm) un espacio topologico finito T0 con punto de base xmy cuyo diagrama de Hasse asociado se denota por H(X). Un par ordenado de puntose = (x, y) se denomina una H -arista de X, si (x, y) ∈ E(H(X)) o (y, x) ∈ E(H(X)).El punto x es llamado el origen de e y se denota por x = o(e). El punto y se llama finalde e y se denota por x = f(e). El inverso de una H -arista e = (x, y) es la H -aristae−1 = (y, x).
Un H -camino en (X, xm) es una sucesion (posiblemente vacıa) de H -aristas ξ =e1e2 · · · er tal que f(ek) = o(ek+1), para todo k = 1, . . . , r−1. El origen de un H -caminono vacıo ξ es o(ξ) := o(e1) y su final es f(ξ) := f(er). El origen y el final del H -caminovacıo ∅ es o(∅) = f(∅) = xm. Si ξ y ξ′ son H -caminos tales que f(ξ) = o(ξ′), definimosel H -camino producto ξξ′ como la concatenacion de la sucesion ξ seguida por ξ′.
Un H -camino ξ = e1e2 · · · er se dice monotono, si ei ∈ E(H(X)) para todo i =1, . . . , r o e−1
i ∈ E(H(X)) para todo i = 1, . . . , r. Un H -lazo basado en xm es un H -camino cuyo origen y final coinciden con xm. Dados dos H -lazos basados en xm ξ yξ′, decimos que son cercanos, si existen H -caminos ξ1, ξ2, ξ3, ξ4 tales que ξ2 y ξ3 sonmonotonos, y el conjunto {ξ, ξ′} coincide con {ξ1ξ2ξ3ξ4, ξ1ξ4}.

CAPITULO 3. TOPOLOGIA ALGEBRAICA 63
Decimos que dos H -lazos ξ, ξ′ basados en xm son H -equivalentes, si existe unasucesion finita ξ = ξ1, ξ2, . . . , ξr = ξ′ de H -lazos tal que cualquier par de ellos consecu-tivos son cercanos. Denotamos por 〈ξ〉 la clase de ξ bajo la relacion de equivalencia serH -equivalente y definimos el conjunto
H (X, xm) = {〈ξ〉 | ξ es un H -lazo basado en xm} . (3.2)
Teorema 3.4.2. [3] Sea (X, xm) un espacio topologico finito T0 con punto de base xm.Entonces el producto 〈ξ〉〈ξ′〉 := 〈ξξ′〉 esta bien definido e induce una estructura de grupoen H (X, xm).
Corolario 3.4.3. [3] Sea (X, xm) un espacio topologico finito T0 con punto de base xm,entonces H (X, xm) ' π1(X, xm).
A partir de lo anterior, vamos a construir nuestro grupo usando la informacionsuministrada por la matriz topogenea del espacio.
Definicion 3.4.4. Sea (X, xm) un espacio topologico finito T0 con punto de base xm,con matriz topogenea TX = [tij] triangular superior de tamano n × n y donde X ={x1, . . . , xn}. Un T -camino en (X, xm), es una lista de numeros η = α1α2 · · ·αr conαk ∈ In y r > 2, tales que tαk,αk+1
= 1 o tαk+1,αk = 1, para todo k = 1, . . . , r − 1, supunto inicial es c(η) = α1 y su punto final es f(η) = αr. El T -camino inverso de η lodenotaremos por η−1 = αr · · ·α2α1. Asumimos que la lista vacıa φ es un T -camino quecomienza y termina en m.
Un T -camino η se dice monotono, si αk 6 αk+1 para todo k, o, αk+1 6 αk paratodo k. Un T -ciclo basado en xm ∈ X es un T -camino η tal que c(η) = f(η) = m. Launion de dos T -caminos η = α1α2 · · ·αr y λ = β1β2 · · · βs la denotamos por η ? λ y esel T -camino que satisface:
η ? λ =
{α1α2 · · ·αrβ1β2 · · · βs , αr 6= β1
α1α2 · · ·αrβ2 · · · βs , αr = β1
es decir, la union tendra sentido cuando tαrβ1 = 1 o tβ1αr = 1, y sera la concatenacionhabitual de los T -caminos si f(η) 6= c(λ), y si f(η) = c(λ) entonces eliminamos el ele-mento repetido y luego sı concatenamos; por ejemplo, suponiendo que las listas η = 125y λ = 432441 son T -caminos, tenemos η ? λ = 125432441, y si η = 125 y λ = 532441entonces en este caso η ? λ = 12532441.
Decimos que dos T -caminos η y λ son cercanos, si existen T -caminos η1, η2, η3, η4
tales que {η, λ} = {η1 ? η4, η1 ? η2 ? η3 ? η4}, donde η2 y η3 son monotonos y se cumpleque f(η1) = c(η2) = f(η3) = c(η4) (en particular, η2 ? η3 es un T -ciclo basado en algun

CAPITULO 3. TOPOLOGIA ALGEBRAICA 64
xk). A partir de esta definicion, es sencillo ver que si η y λ son cercanos, entonces η ? γy λ ? γ tambien lo son, y similarmente para ρ ? η y ρ ? λ, donde γ y ρ son T -caminospara los que esten definidas las uniones respectivas.
Observacion 3.4.5. Si η = α1α2 · · ·αr es un T -camino, entonces η?αrαr = α1α2 · · ·αrαres cercano a η, pues podemos escribir η ? αrαr = η ? αrαr ? φ ? φ; de la misma forma losT -caminos η y α1α1 ? η son cercanos.
Dos T -ciclos η y η′ se dicen T -equivalentes, y esto lo denotamos por [η] = [η′],si existe una sucesion finita de T -ciclos η = η1, η2, . . . , ηp = η′ tal que cada par deellos consecutivos son cercanos. Para cada xm ∈ X, la relacion ser T -equivalente en lacoleccion de T -ciclos basados en xm, es reflexiva, simetrica y transitiva. El conjunto
T (X, xm) = {[η] | η es un T -ciclo basado en xm} (3.3)
junto con la operacion
∗ : T (X, xm)×T (X, xm) −→ T (X, xm)
([η], [λ]) 7−→ [η] ∗ [λ] := [η ? λ]
resulta ser un grupo. En efecto, verifiquemos las propiedades de la operacion ∗:
Sean [η] = [η′] y [λ] = [λ′], entonces existen sucesiones de T -ciclos basados en xmtales que cada par de ellos consecutivos son cercanos:
η = η1, η2, . . . , ηp = η′
λ = λ1, λ2, . . . , λq = λ′
por lo tanto,
η ? λ = η1 ? λ, η2 ? λ, . . . , ηp ? λ = η′ ? λ = η′ ? λ1, η′ ? λ2, . . . , η
′ ? λq = η′ ? λ′
y ası [η ? λ] = [η′ ? λ′], mostrando que la operacion ∗ esta bien definida.
Como la union de T -ciclos es asociativa, ∗ tambien lo es.
La clase de la lista vacıa [φ] es el modulo para ∗, pues si [η] ∈M(X, xm), entonces[η] ∗ [φ] = [η ? φ] = [η] = [φ ? η] = [φ] ∗ [η].
Probemos por induccion sobre r que si η = α1α2 · · ·αr es un T -ciclo basado enxm, se cumple [η] ∗ [η−1] = [φ] = [η−1] ∗ [η]. Para r = 2 tenemos η = α1α2 = mmy η−1 = mm. Como φ = φ ? φ y η ? η−1 = mmm = φ ? mm ? mm ? φ, entonces φy η ? η−1 son cercanos y ası [φ] = [η ? η−1]; similarmente [φ] = [η−1 ? η].

CAPITULO 3. TOPOLOGIA ALGEBRAICA 65
Supongamos que η = α1α2 · · ·αrαr+1 es un T -ciclo basado en xm, entonces te-niendo en cuenta la observacion 3.4.5,
[η ? η−1] = [α1α2 · · ·αrαr+1αr · · ·α2α1]
= [α1α2 · · ·αr ? αrαr+1 ? αr+1αr ? αr · · ·α2α1]
= [α1α2 · · ·αr−1αrαr−1 · · ·α2α1]
...
= [α1α2α1]
= [α1α1 ? α1α2 ? α2α1 ? α1α1]
= [α1α1α1] = [mmm] = [φ]
Analogamente puede probarse la igualdad [η−1 ? η] = [φ], mostrando que efectiva-mente [η−1] es el inverso de [η].
Lema 3.4.6. Sea (X, xm) un espacio topologico finito T0 con punto de base xm.
(i) Si α1 · · ·αi−1αiαi+1αi+2 · · ·αr y α1 · · ·αi−1αiαi+2 · · ·αr son T -ciclos donde αi =αi+1, entonces
[α1 · · ·αi−1αiαi+1αi+2 · · ·αr] = [α1 · · ·αi−1αiαi+2 · · ·αr].
(ii) Si η1, η2 y η3 son T -caminos donde η2 = α1α2 · · ·αr es monotono, el T -cicloη1 ? η2 ? η3 es T -equivalente a η1 ? α1αr ? η3.
Demostracion. Para probar (i), basta con observar que αiαi+1 y φ son T -caminosmonotonos, luego
α1 · · ·αi−1αiαi+1αi+2 · · ·αr = α1 · · ·αi−1αi ? αiαi+1 ? φ ? αi+1αi+2 · · ·αr
Por otro lado, la parte (i) permite asumir sin perdida de generalidad en (ii), queη1 ? η2 ? η3 no tiene elementos consecutivos iguales y ademas, deja ver que η1 ? η2 ?η3 = η1 ? f(η1)α1α2 · · ·αr ? η3 es T -equivalente a (η1 ? f(η1)α1) ? α2α2 ? φ ? (α3 · · ·αr ?η3), lo que a su vez, por definicion, es cercano al T -ciclo (η1 ? f(η1)α1) ? (α3 · · ·αr ?η3) = η1 ? α1α3 · · ·αr ? η3. Continuando de manera recursiva, obtenemos que para cadaj = 2, . . . , r − 1, η1 ? α1αj · · ·αr ? η3 es T -equivalente a η1 ? α1αj+1 · · ·αr ? η3, dedonde concluimos por transitividad que η1 ? α1α2 · · ·αr ? η3 y η1 ? α1αr ? η3 son T -equivalentes. �

CAPITULO 3. TOPOLOGIA ALGEBRAICA 66
Teorema 3.4.7. Sea (X, xm) un espacio topologico finito T0 con punto de base xm, conmatriz topogenea TX = [tij] triangular superior de tamano n × n. Entonces el grupoT (X, xm) es isomorfo a H (X, xm).
Demostracion. Definamos la aplicacion
ϕ : H (X, xm) −→ T (X, xm)
〈e1e2 · · · ep〉 7−→ [α1α2 · · ·αp+1] (3.4)
〈∅〉 7−→ [φ]
donde ek = (xαk , xαk+1) ∈ E(H(X)) o e−1
k ∈ E(H(X)), para todo k = 1, 2, . . . , p. Lafuncion ϕ esta bien definida (basta probarlo para H -lazos cercanos), pues si ξ = ξ1ξ4 yξ′ = ξ1ξ2ξ3ξ4, donde ξ2 y ξ3 son H -caminos monotonos y tales que:
ξ1 = (xα1 , xα2)(xα2 , xα3) · · · (xαr , xαr+1)
ξ2 = (xβ1 , xβ2)(xβ2 , xβ3) · · · (xβs , xβs+1)
ξ3 = (xγ1 , xγ2)(xγ2 , xγ3) · · · (xγp , xγp+1)
ξ4 = (xδ1 , xδ2)(xδ2 , xδ3) · · · (xδq , xδq+1)
entonces, como β1β2 · · · βsβs+1 y γ1γ2 · · · γpγp+1 son T -caminos monotonos que satisfa-cen β1 = γp+1 = δ1 = αr+1,
ϕ(〈ξ〉) = [α1α2 · · ·αrαr+1 ? δ1δ2 · · · δqδq+1]
= [α1α2 · · ·αrαr+1 ? β1β2 · · · βsβs+1 ? γ1γ2 · · · γpγp+1 ? δ1δ2 · · · δqδq+1]
= ϕ(〈ξ′〉)
Ahora bien, si 〈ξ〉, 〈ξ′〉 ∈H (X, xm) son arbitrarios con
ξ = (xα1 , xα2)(xα2 , xα3) · · · (xαr , xαr+1)
ξ′ = (xβ1 , xβ2)(xβ2 , xβ3) · · · (xβs , xβs+1)
entonces, teniendo en cuenta que α1 = αr+1 = β1 = βs+1 = m, tienen sentido lasigualdades
ϕ(〈ξ〉〈ξ′〉) = ϕ(〈ξξ′〉) = [α1α2 · · ·αrαr+1 ? β1β2 · · · βsβs+1] = ϕ(〈ξ〉) ∗ ϕ(〈ξ′〉),
de donde concluimos que ϕ es un homomorfismo de grupos. Probaremos que esta apli-cacion ϕ es de hecho un isomorfismo de grupos, mostrando explıcitamente su funcioninversa. Definamos la aplicacion
ψ : T (X, xm) −→H (X, xm)
[α1α2 · · ·αp+1] 7−→ 〈e1e2 · · · ep〉 (3.5)
[φ] 7−→ 〈∅〉

CAPITULO 3. TOPOLOGIA ALGEBRAICA 67
suponiendo sin perdida de generalidad, por el lema 3.4.6, que no existe j tal que αj =αj+1, y donde ek = (xαk , xαk+1
) ∈ E(H(X)) o e−1k ∈ E(H(X)). La aplicacion ψ esta bien
definida para T -ciclos cercanos (y por tanto tambien para T -ciclos equivalentes), puessi η = η1 ? η4 y λ = η1 ? η2 ? η3 ? η4, donde η2 y η3 son T -caminos monotonos tales que
η1 = α1α2 · · ·αr , η2 = β1β2 · · · βs , η3 = γ1γ2 · · · γp , η4 = δ1δ2 · · · δq
con αr = β1 = γp = δ1 entonces, suponiendo βs = γ1, definimos los H -caminos,
ξ1 = (xα1 , xα2)(xα2 , xα3) · · · (xαr−1 , xαr)
ξ2 = (xβ1 , xβ2)(xβ2 , xβ3) · · · (xβs−1 , xβs)
ξ3 = (xγ1 , xγ2)(xγ2 , xγ3) · · · (xγp−1 , xγp)
ξ4 = (xδ1 , xδ2)(xδ2 , xδ3) · · · (xδq−1 , xδq)
donde vemos que ξ2 y ξ3 son monotonos, por ser triangular superior la matriz topogenea,y por lo tanto
ψ([λ]) = 〈ξ1ξ2ξ3ξ4〉 = 〈ξ1ξ4〉 = ψ([η]).
En el caso cuando βs 6= γ1, no es difıcil ver que ξ2(xβs , xγ1)ξ3 puede escribirse comoξ′2ξ′3 donde ξ′2 y ξ′3 son caminos monotonos y de nuevo
ψ([λ]) = 〈ξ1ξ′2ξ′3ξ4〉 = 〈ξ1ξ4〉 = ψ([η])
demostrando que efectivamente la aplicacion ψ esta bien definida.
Ahora bien, suponiendo que [η], [λ] ∈ T (X, xm) son clases arbitrarias tales que susrepresentantes η = α1α2 · · ·αr y λ = β1β2 · · · βs satisfacen αk 6= αk+1 y βj 6= βj+1
para todo k = 1, · · · , r − 1 y todo j = 1, . . . , s − 1 (se garantiza por el lema 3.4.6), yrecordando que α1 = αr = m = β1 = βs tenemos:
ψ([η] ∗ [λ]) = ψ([α1α2 · · ·αr−1β1β2 · · · βs−1βs])
= 〈(xα1 , xα2) · · · (xαr−1 , xβ1)(xβ1 , xβ2) · · · (xβs−1 , xβs)〉= 〈(xα1 , xα2) · · · (xαr−1 , xαr)〉〈(xβ1 , xβ2) · · · (xβs−1 , xβs)〉= ψ([η])ψ([λ]),
de donde concluimos que ψ es un homomorfismo de grupos. Por la definicion de lasaplicaciones ϕ y ψ, es sencillo ver que son inversas, demostrando ası que los gruposT (X, xm) y H (X, xm) son isomorfos, como querıamos. �
Del teorema anterior y del corolario 3.4.3 obtenemos el siguiente resultado.
Corolario 3.4.8. Sea (X, xm) un espacio topologico finito T0 con punto de base xm, conmatriz topogenea TX = [tij] triangular superior de tamano n×n. Entonces T (X, xm) 'π1(X, xm).

CAPITULO 3. TOPOLOGIA ALGEBRAICA 68
Ejemplo 3.4.9. Por ejemplo, en la matriz del modelo minimal de S1, vemos que t13 =t23 = t24 = t14 = 1 luego 13241 es un T -ciclo basado en x1. Observese que las cuatroentradas forman un cuadrado (rectangulo) o un ciclo en la matriz. Ademas, puedeverificarse que dicho ciclo no es equivalente a ningun otro T -ciclo, y sabiendo queπ1(S1, 1) ' Z, tenemos que π1(S1, 1) ' T (X, xm) = 〈[13241]〉.
1 0 1 10 1 1 10 0 1 00 0 0 1
.Ahora, consideramos el mismo T -ciclo 13241 basado en x1 esta vez en la matriz del
modelo minimal para S2: 1 0 1 1 1 10 1 1 1 1 10 0 1 0 1 10 0 0 1 1 10 0 0 0 1 00 0 0 0 0 1
Las siguientes igualdades muestran que en este caso la clase del T -ciclo es trivial:
[13241] = [132 ? 236 ? 42 ? 241] = [132364241] = [13641] = [11 ? 136 ? 41 ? 11] = [11] = [φ]
lo que no es sorprendente sabiendo que π1(S2, 1) = 0.
3.5. Conexion con complejos simpliciales
Finalizamos nuestro trabajo con una breve introduccion a la correspondencia exis-tente entre los espacios T0 y los complejos simpliciales finitos, expuesta por McCorden [7], y que conectaremos con nuestras matrices para encontrar las representacionesmatriciales de los operadores de borde que definen la homologıa (singular) del complejosingular del espacio X (K), donde K es un complejo simplicial finito arbitrario, en elcaso particular cuando el grupo de coeficientes es F2 = {0, 1}.
Observacion 3.5.1. En esta seccion, usaremos el sımbolo |K| no para denotar el car-dinal del complejo simplicial K, como hemos venido haciendolo, sino para indicar surealizacion geometrica que sera definida mas adelante.
Definicion 3.5.2. Sea V un conjunto finito. Un complejo simplicial K es una coleccionde subconjuntos de V que satisface las siguientes condiciones:
1. Para todo v ∈ V se cumple {v} ∈ K.

CAPITULO 3. TOPOLOGIA ALGEBRAICA 69
2. Si τ ∈ K y σ ⊆ τ entonces σ ∈ K.
El conjunto V es el conjunto de vertices de K. Abusando de la notacion, escribiremosv ∈ K si v ∈ V . Cada elemento σ de K se denomina sımplice y su dimension dim(σ) esigual al cardinal de σ menos uno. Si la dimension de σ es igual a q, decimos que σ es unq-sımplice; a la coleccion de q-sımplices de K la denotaremos por Kq. En particular, elconjunto V esta relacionado biunıvocamente con K0. La dimension de K es el maximoentre las dimensiones de sus sımplices. Si τ ⊆ σ, decimos que τ es una cara de σ y siτ ⊂ σ, decimos que τ es una cara propia de σ.
La envolvente convexa de una coleccion {q1, . . .qm} ⊆ Rd es el conjunto
Conv(q1, . . .qm) =
{m∑k=1
αkqk : αk > 0,m∑k=1
αk = 1
}Denotando por {e1, . . . , ed+1} la base canonica de Rd+1, el simplex estandar d-dimensional∆d ⊆ Rd+1 es definido por:
∆d = Conv(e1, . . . , ed+1) = {(u1, . . . , ud+1) : u1 + · · ·+ ud+1 = 1 donde uk > 0}
Definicion 3.5.3. Sea K un complejo simplicial finito con d + 1 vertices ordenadosV = {v1, v2, . . . , vd+1}. Para cada sımplice σ = {vk1 , . . . , vkm} definimos |σ| ⊆ ∆d por|σ| = Conv(ek1 , . . . , ekm). La realizacion geometrica |K| ⊆ ∆d de K es el conjunto:
|K| =⋃σ∈K
|σ|
El baricentro de σ es el punto b(σ) = b(k1, . . . , km) :=m∑k=1
eikm∈ |σ|.
Definicion 3.5.4. Sea K un complejo simplicial finito. El espacio T0 X (K) asociado aK, es el poset cuyos elementos son los baricentros de los sımplices de K ordenados porla relacion: b(τ) 6 b(σ) si τ ⊆ σ.
Ejemplo 3.5.5. Si numeramos los vertices del complejo simplicial K de la izquierda,donde la parte sombreada indica una region plana,
x1
x2
x3
x4
x5
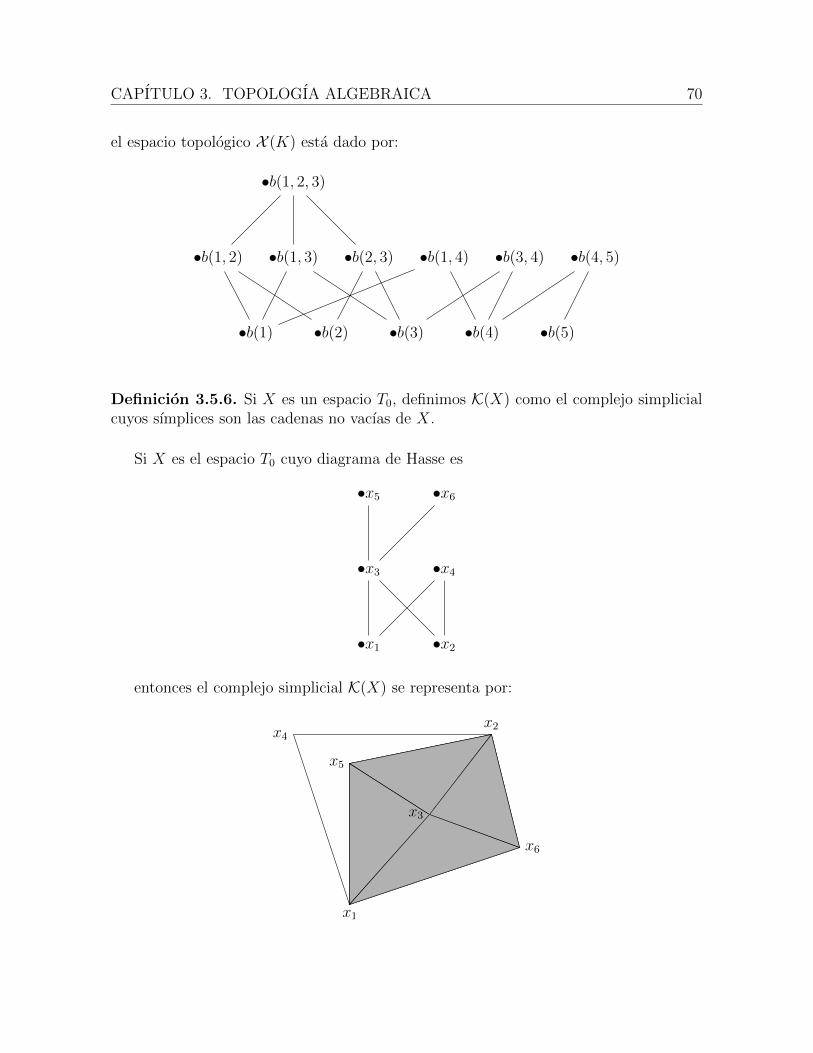
CAPITULO 3. TOPOLOGIA ALGEBRAICA 70
el espacio topologico X (K) esta dado por:
•b(1) •b(2) •b(3) •b(4) •b(5)
•b(1, 2) •b(1, 3) •b(2, 3) •b(1, 4) •b(3, 4) •b(4, 5)
•b(1, 2, 3)
Definicion 3.5.6. Si X es un espacio T0, definimos K(X) como el complejo simplicialcuyos sımplices son las cadenas no vacıas de X.
Si X es el espacio T0 cuyo diagrama de Hasse es
•x1 •x2
•x3 •x4
•x5 •x6
entonces el complejo simplicial K(X) se representa por:
x1
x2
x3
x4
x5
x6
x3

CAPITULO 3. TOPOLOGIA ALGEBRAICA 71
Definicion 3.5.7. Tomemos un anillo (A,+, ·, 0, 1). Sean K un complejo simplicialfinito y V = {v0, v1, . . . , vd} el conjunto de sus vertices ordenados. El grupo de cadenas d-dimensional Cd(K,A) de K, esta formado por las combinaciones A-lineales de sımplicesd-dimensionales:
Cd(K,A) =
{m∑k=1
αkσk : αk ∈ A, σk ∈ Kd, m > 1
}
y sus elementos se denominan cadenas d-dimensionales. Si σ = {v0, . . . , vd} ∈ Kd, paracada k ∈ {0, 1, . . . , d} denotaremos por σk a la cara (d − 1)-dimensional que contienetodos los vertices de σ, excepto vk, esto es σk = {v0, . . . , vk−1, vk+1, . . . , vd}. El borde deσ es la cadena (d− 1)-dimensional
∂d(σ) =d∑
k=0
(−1)kσk. (3.6)
Podemos entonces definir el operador de borde ∂d, como la transformacion A-lineal
∂d : Cd(K,A) −→ Cd−1(K,A)m∑k=1
σ(k) 7−→m∑k=1
∂d(σ(k)) (3.7)
A partir del operador ∂d, definimos el grupo de ciclos d-dimensional Zd(K,A) :=ker ∂d y el grupo de bordes (d− 1)-dimensional Bd−1(K,A) := Im ∂d. Puede verificarsela contenencia Bd(K,A) ⊆ Zd(K,A). Definimos el grupo de homologıa d-dimensionalcomo el grupo cociente:
Hd(K,A) = Zd(K,A)/Bd(K,A)
El d-esimo numero de Betti βd esta dado por:
βd = rank Hd(K,A) = dim ker ∂d − dim Im ∂d+1
McCord demuestra que los espacios topologicos finitos y los complejos simplicialesfinitos, conectados por las aplicaciones K y X (funtores), comparten los mismos gruposde homotopıa como lo evidencia el siguiente resultado.
Teorema 3.5.8. [7] Para cada espacio topologico finito X, existe una equivalencia ho-motopica debil f : |K(X)| → X. Para cada complejo simplicial finito K, existe unaequivalencia homotopica debil g : |K| → X (K).
Ahora bien, se puede demostrar que toda equivalencia homotopica debil f : X −→ Yentre espacios topologicos, induce isomorfismos f∗ : Hd(X,A) −→ Hd(Y,A) entre losgrupos de homologıa, para todo n > 0 y todo grupo de coeficientes A [5], por lo que

CAPITULO 3. TOPOLOGIA ALGEBRAICA 72
las conexiones expuestas por McCord en el teorema 3.5.8 permiten estudiar los gruposde homologıa en cualquiera de los dos contextos, espacios T0 y complejos simplicialesfinitos. El siguiente teorema permite encontrar las matrices de todos los operadores deborde asociados a K, por medio de la matriz de Stong de X (K).
Teorema 3.5.9. Si K es un complejo simplicial de dimension m, la matriz de Stongasociada al espacio X (K) es:
In0 ∂1 0 · · · 0
In1 ∂2. . .
.... . . . . . 0
0. . . ∂m
Inm
,
donde nk es el numero de k-sımplices de K y ∂k es la matriz que representa el operadorde borde k-dimensional con coeficientes en F2 = {0, 1}:
0∂m+1−−−→ Cm(K,F2)
∂m−−→ Cm−1(K,F2) −→ · · · −→ C1(K,F2)∂1−→ C0(K,F2)
∂0−→ 0
Demostracion. Sea SX (K) = [sij]. Por definicion de una matriz de Stong, para i < j,sij = 1 si, y solo si, b(σi) < b(σj) y h(b(σj)) = h(b(σi)) + 1. Ademas por la construcciondel espacio X (K) tenemos que para todo sımplice τ , la altura de b(τ) satisface h(b(τ)) =dim(τ) + 1, luego
sij = 1⇐⇒ σi ⊂ σj y dim(σj) = dim(σi) + 1
es decir, σi es una cara propia maximal de σj. De lo anterior, vemos que la columna querepresenta a b(σj) en SX (K), tiene entradas iguales a uno exactamente en las filas querepresentan las caras propias maximales de σj (y en la diagonal), tal y como sucede enla representacion matricial de los operadores de borde con coeficientes en F2. �
Ejemplo 3.5.10. La matriz topogenea y la matriz de Stong de X (K) en el ejemplo3.5.5 son las siguientes:
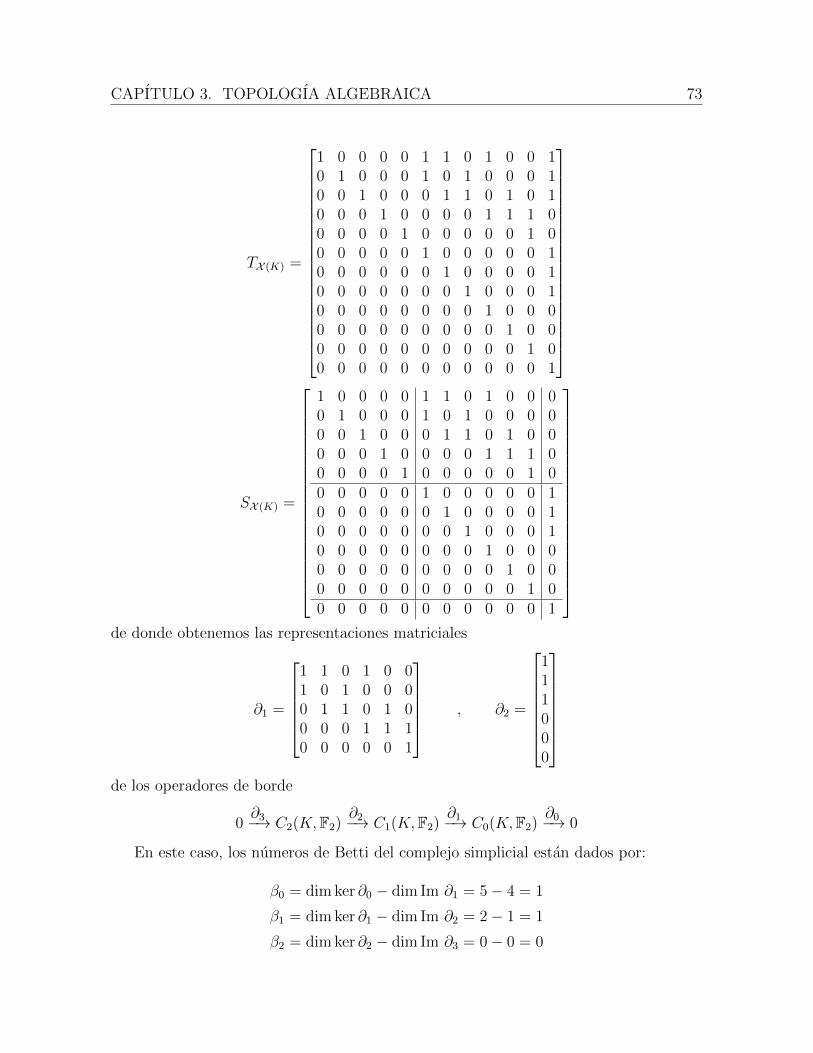
CAPITULO 3. TOPOLOGIA ALGEBRAICA 73
TX (K) =
1 0 0 0 0 1 1 0 1 0 0 10 1 0 0 0 1 0 1 0 0 0 10 0 1 0 0 0 1 1 0 1 0 10 0 0 1 0 0 0 0 1 1 1 00 0 0 0 1 0 0 0 0 0 1 00 0 0 0 0 1 0 0 0 0 0 10 0 0 0 0 0 1 0 0 0 0 10 0 0 0 0 0 0 1 0 0 0 10 0 0 0 0 0 0 0 1 0 0 00 0 0 0 0 0 0 0 0 1 0 00 0 0 0 0 0 0 0 0 0 1 00 0 0 0 0 0 0 0 0 0 0 1
SX (K) =
1 0 0 0 0 1 1 0 1 0 0 00 1 0 0 0 1 0 1 0 0 0 00 0 1 0 0 0 1 1 0 1 0 00 0 0 1 0 0 0 0 1 1 1 00 0 0 0 1 0 0 0 0 0 1 00 0 0 0 0 1 0 0 0 0 0 10 0 0 0 0 0 1 0 0 0 0 10 0 0 0 0 0 0 1 0 0 0 10 0 0 0 0 0 0 0 1 0 0 00 0 0 0 0 0 0 0 0 1 0 00 0 0 0 0 0 0 0 0 0 1 00 0 0 0 0 0 0 0 0 0 0 1
de donde obtenemos las representaciones matriciales
∂1 =
1 1 0 1 0 01 0 1 0 0 00 1 1 0 1 00 0 0 1 1 10 0 0 0 0 1
, ∂2 =
111000
de los operadores de borde
0∂3−→ C2(K,F2)
∂2−→ C1(K,F2)∂1−→ C0(K,F2)
∂0−→ 0
En este caso, los numeros de Betti del complejo simplicial estan dados por:
β0 = dim ker ∂0 − dim Im ∂1 = 5− 4 = 1
β1 = dim ker ∂1 − dim Im ∂2 = 2− 1 = 1
β2 = dim ker ∂2 − dim Im ∂3 = 0− 0 = 0


Conclusiones y recomendaciones
Conclusiones
Este trabajo aborda el estudio de los espacios topologicos finitos desde un enfoquematricial, rescatando las ideas de Shiraki y Stong, lo que permite aprovechar la natu-raleza algebraica de las matrices para guardar y procesar la informacion asociada a laspropiedades de una topologıa. Este aspecto puede explotarse desde varios puntos devista segun las caracteristicas que se quieran estudiar. Por ejemplo, la asignacion dematrices a las funciones submodulares fU y fD permite identificar numericamente lascaracterizaciones de propiedades topologicas encontradas en [9], citadas en el capıtulo 1.
En [1], Abril presenta algoritmos para la identificacion de beat points, siendo necesa-rio observar el diagrama de Hasse para tal proposito. El uso de las matrices topogeneasy la introduccion de las matrices que denominamos de Stong, hace posible la eliminacionno solamente de beat points sino tambien de los weak points, reduciendo puntualmenteun espacio finito sin utilizar el diagrama de Hasse como parte del proceso.
Despues de realizar las reducciones puntuales de beat y weak points en un espacio X,puede calcularse la matriz de Stong de X (K(X)) para encontrar los grupos de homologıa(singular), y por consiguiente los numeros de Betti, asociados al complejo singular
0∂m+1−−−→ Cm(K(X),F2)
∂m−−→ Cm−1(K(X),F2) −→ · · · −→ C0(K(X),F2)∂0−→ 0
que por la teorıa de McCord, coinciden con los asociados al complejo singular de X.
Pretendemos que los conceptos y procedimientos explicados en los capıtulos 2 y 3,sean base para un posterior estudio detallado de los grupos de homologıa asociados aun espacio finito arbitrario, que son usados en la actualidad para determinar diferentesformas y estructuras topologicas en nubes de datos, area conocida como homologıa per-sistente de datos, que ha mostrado efectividad en el estudio de las conexiones cerebralesy de otros sistemas biologicos complejos [8].
75

Recomendaciones
A continuacion se listan algunas recomendaciones sobre preguntas que pueden abor-darse en futuros trabajos:
En la busqueda por definir la entropıa H(X,T ) de un espacio topologico fini-to, parece natural, en una primera aproximacion, intentar asociar a cada espaciotopologico una funcion de probabilidad P , que pertenezca a λ(NT ), de maneraque
H(X,T ) := H(P ) = −n∑i=1
P (xi) logP (xi)
Sin embargo, solamente existe una topologıa T que permite dicha funcion deprobabilidad en λ(NT ), como lo muestra la siguiente proposicion.
Proposicion 3.5.11. Sea (X,T ) un espacio topologico finito. Si existe una fun-cion de probabilidad P : 2X −→ R tal que P ∈ λ(NT ), el espacio (X,T ) es eldiscreto.
Demostracion. Sea P : 2X −→ R una funcion de probabilidad tal que P ∈ λ(NT ),es decir, se cumple NP = NT con
NP ={
(A,B) ∈ 2X × 2X : P (A) = P (A ∪B)}
={
(A,B) ∈ 2X × 2X : P (B) = P (A ∩B)}
NT ={
(A,B) ∈ 2X × 2X : B ⊆ c(A)}
donde c es el operador de clausura asociado al espacio, y ademas hemos usado lapropiedad modular de la funcion de probabilidad, esto es, que para todo A,B ∈ 2X
se cumpleP (A ∪B) + P (A ∩B) = P (A) + P (B).
Ahora bien, si A ⊆ X fuera tal que c(A) * A, entonces existirıa b ∈ c(A) conb /∈ A de donde {b} ⊆ c(A) y ası (A, {b}) ∈ NT = NP , luego tendrıamos queP (b) = P (A ∩ {b}) = P (∅) lo que no es posible por la proposicion 1.4.11. De loanterior, concluimos que todo subconjunto A de X es un conjunto cerrado, lo quesolamente sucede cuando el espacio es discreto. �
En vista de lo anterior, continua abierta la pregunta ¿como definir la entropıa deun espacio topologico finito?, en otras palabras ¿cual es la manera de distinguirespacios topologicos finitos desde el punto de vista de la teorıa de la informacion?
76
En [3], Barmak introduce la nocion de γ-points que resultan ser una generalizacionde los weak points, y por tanto de los beat points, lo que permite mas reduccionespuntuales en el estudio de los tipos de homotopıa debil y en el calculo de losgrupos de homologıa y los numeros de Betti. Queda la inquietud ¿como identificarlos γ-points de un espacio finito usando alguna de sus matrices asociadas?
En el capıtulo 2 definimos las matrices UX y DX asociadas a las funciones submo-dulares fU y fD. Ası como existe una caracterizacion de las matrices topogeneasy de Stong, ¿existe alguna forma de identificar si una matriz cuadrada arbitrariaes la UX (o DX) de algun espacio topologico finito?, ¿es posible definir una matrizMf asociada a una funcion submodular f arbitraria?, y si es ası ¿que propieda-des particulares satisfacen dichas matrices, que podamos usar en el estudio de losespacios finitos?
Destacar la importancia del grupo T (X, xm), isomorfo al grupo fundamental dehomotopıa π1(X, xm), definido en la seccion 3.3.
Finalmente, serıa interesante retomar el trabajo de Krishnamurthy en [6], usandolas matrices topogeneas para intentar el conteo de las topologıas definibles en unconjunto finito, problema que continua aun sin resolverse.
77

Bibliografıa
[1] Abril J.A., Una aproximacion a la nocion de homotopıa entre espacios topologicosfinitos desde las funciones submodulares, Trabajo Final de Maestrıa, UniversidadNacional de Colombia, Facultad de Ciencias (2015).
[2] Alexandroff P., Diskrete Raume, Mat. Sb. (N.S.)2, 501-518 (1937).
[3] Barmak, J.A., Algebraic topology of finite topological spaces and applications, Lec-ture Notes in Mathematics Vol. 2032 (2011).
[4] Barmak, J.A. y Minian E.G., Minimal finite models, Journal of Homotopy andRelated Structures, Vol. 2(1), 127-140 (2007).
[5] Hatcher A., Algebraic topology, Cambridge University Press (2002).
[6] Krishnamurthy V., On the number of topologies on a finite set, Amer. Math. Montly73, 154-157 (1966).
[7] McCord M.C., Singular homology groups and homotopy groups of finite topologicalspaces, Duke Math. J., 33(3), 465–474 (1966).
[8] Nanda V. y Sazdanovic R., Simplicial models and topological inference in biologi-cal systems, Discrete and Topological Models in Molecular Biology, Springer, pp.109–141 (2014).
[9] Roa L., Una nueva construccion de los espacios topologicos finitos desde las funcio-nes submodulares, Trabajo Final de Maestrıa, Universidad Nacional de Colombia,Facultad de Ciencias (2012).
[10] Shiraki, M., On finite topological spaces, Rep. Fac. Sci. Kagoshima Univ., 1, 1-8(1968).
[11] Stong R.E., Finite topological spaces, Trans. Amer. Math. Soc., 123(2), 325–340(1966).
[12] Varela R., FD relaciones, Trabajo Final de Maestrıa, Universidad Nacional de Co-lombia, Facultad de Ciencias (2011).
79


![F´ısica Experimental I - Novedades — Departamento de ... · F´ısica Experimental I - 2do. Cuat. 2009 Bibliograf´ıa [1] D.C. Baird, Experimentacion–Una introducci´on a la](https://static.fdocuments.es/doc/165x107/5c2810db09d3f29e278bdb18/fisica-experimental-i-novedades-departamento-de-fisica-experimental.jpg)