Funfamentos de La Teoria de... Automotris de CHUDAKOV
219
,': 2 ct ') -:' 'r' /\ I ¿/t _\ ( D. A. Chudakov ,[,. A. qyAAKOB OCHOBb] TEOPVIIA 14 PACT{ETA TPAKTOPA 14 ABTOMOEI4/Ifl h3AATE¡bCTBO «KO,IIOC» MOCKBA FIJNDAIVIENTOS DE r-A TEüRíA Y TL ÜALCULG DE TRACTGRMS . rl ,T, J .1 I Y ATJTÜMüVILE§ Editorial Mir Moscú
-
Upload
samuel-astete-choquevillca -
Category
Documents
-
view
765 -
download
98
Transcript of Funfamentos de La Teoria de... Automotris de CHUDAKOV

,': 2 ct ') -:''r' /\ I ¿/t _\
( D. A. Chudakov
,[,. A. qyAAKOB
OCHOBb] TEOPVIIA 14 PACT{ETATPAKTOPA 14 ABTOMOEI4/Ifl
h3AATE¡bCTBO «KO,IIOC»
MOCKBA
FIJNDAIVIENTOS
DE r-A TEüRíAY TL ÜALCULGDE TRACTGRMS
. rl
,T,
J.1
I Y ATJTÜMüVILE§
Editorial Mir Moscú

Ve¡sio'n al español
de D. U. oKÚLIK
Impreso en la URSS 1977
@ Traducción al español, Editorial Mir, l9Z7
Designaciones principalesl. Teoría de tractores g automóoiles
ffe - potencia electiva del motor..¡y'n -
'potencia nominal del moür
N-^-- notencia dc frrn¡iÁn.l^l +-^- potencia de tracción del tractor'gan puLrrrLrd uE Ltdcctun qgl tfactor,"r, - polencia especí[ica del tractor o auiomóvilMm-
AIn -
i;:',- ;T:,:.: ;.:,0;"" m'trices (oru'
M".b - momento de lrotamiento del embrague/1,I, - momento de las f ue¡zas de f¡otamiintoMo - momento de -resistencia al giro de un tractorpor la reacción del suelonlr., - momento resultante de resistencia al giro
orugartrl* - moriento de giro del tractor de orugalvlá - momento de resistehcia a la rodadrra der tractor o er automó-
vil,&Ir, - momento de resistencia a Ia rodadura de Ias ruedas conduci-
das,VIr. - momento de resistencia a la rodadura
M r"d - momento de resistencia del conjunto
de oruga, creado
de un t¡actor de
de las ruedas motricestractor reducido al eje
_ primario de la transmisiónPr*- Íuerza tangencial de tracción
_ Xr - reacción de impulsión (f uerza)
lurn - resistencia de tracción en el ganchoPtru" - resistencia de tracción cle la ááquina
P6 - luerza de ¡esistencia a Ia ¡odaduraP1 - fuerza de inercia de las masas en
Pú - resistencia total del camino
suspendida
movimiento de avance
P. - resistencia del aireP,pf" resistencia-total del camino y det airerfr - Iuerza de IrenadoP*- fuerza de giroP" - fuerza centrí[usaI/, - reacción nornla-i del camino en las ruedas motrices
f4-

/o - reacción normal del camino en las ruedas conducidasI - reacción normal del camino en las orugasI" - reacción normal del suelo en las rueüas de apoyo de la má.
quina suspendidaf¡. - reacción riormal del camino en las ruedas frenadas.X¿ - componente de la resistencia frontal de las orugas y reacción
del camino en las ruedas conducidas, paralela a la superficiedel camino
R - resultante de las reacciones del suelo que actúan sobre los ór-ganos.de trabajo de [a máquina suspendida en el plano longi-tud i nal-vertical
D - [actor dinámico del automóvil./* - momento de inercia de las masas en movimiento del motor. re-
ducido al cigüeñal/" - momento de inercia de tas masas en movimiento del con-junto tractor, reducido al árbol prinrario de ta transmiliónn. - Irecuencía de rotación del árbol del motor
aur"- [recuencia de rotación del árbol del motor con Ia marcha envacío
nn - frecuencia de rotación nominal del árbol del motorno - [recuencia de rotación del árbol del motor con el par motor
máximon, - frecuencia de rotación de las ruedas motricesc¡ - velocidad arrgular de rotación
_!.(u) - velocidad del-movimiento de avance, km/h (m/s)7t (rt) - velocidad teórica de avance, km/h (m/s)'[email protected] velocidad nominal (calculada) de avance, hm/h (m/s)
i - aceleración lineal del vehículo'l¡, - retardación durante el frenadog - aceleración de caída libre
i,. - relación de reducción totaI de la transmisióni" - relación de reducción de la caia de cambio de marchasio - relación de reducción de la trañsmisión principali - relación de reducción del convertidor. ñidráulico
irn - relación de reducción de la parie mecánica de la transmisiónhidrául ica
I¡¡ - rendimiento mecánico de la transmisiónl, - rendimiento de Ia rueda motrizrló- rendimiento que tiene en cuenta las pérdidas por_patinaje de
Ios órganos rnotricesIo. - rendimiento de la orugarl¡- rendimiento que tiene en cuenta las pérdidas por rodadura
4t.ac- rendimiento de tracción del tractorq - rendimiento total del tractor
Ic. h - rendimiento del convertidor hidráulicor¡¡¡ - re.ndimiento de la parte mecánica de la transmisión hidrome-
ca nlc a
Ér, - coeficiente de adaptación del motor según el par motor'Ér.= - coeficiente de reserva del par motor
án - coeliciente de motor según las revolucionesp - coe[iciente de ragueq - coeficiente de os-órganos motrices con el suelo
g, - coeficiente de o del peso de adherenciaÉ. - coeficiente de resistencia del aire
I - coeficiente de resistencia a la rodadura
g - coeIiciente reducido de la resistencia de caminoÉ". h - coeficiente de conversión del momento en el convertidor hi-
dráu licoó - magniiud de patinaje de las ruedas motrices
É¿u. - coeficiente de resistencia a la desviación lateral de los neu-máticos
Ógr, - coeficiente de cálculo de las masas giratorias$ - coeticiente ieducido de Ia resistencia al giro del tractor de
orugaÉtr." - coeficiente de rese¡va del esfuerzo de tracción del tractorÉ0,, - coeficienie de discordancia cinernática de las ruedasIex - coef iciente de carga de explotación del motorr¡6 - coeficiente de la capacidad de carga del automóvil
G - peso del tractor (automóvil)Co - peso proyectado del tractor (automóvil)
Gr¿ - peso de adherenciaG. - peso de la máquina suspendida
G.on - peso del conjunto suspendidoG, - peso transmitido por las ruedas motricesG¿ - peso transmitido por las ruedas conducidasG. - consumo horario de combustibleg¿ - consumo de combustible por I CV e[ectivo h
ggan - consumo de combustible por I CV de tracción h
Q. - consumo de combustible por 100 km de recor¡ido en marchaestable
f - tiempo/¿. - tiempo total de aceleración? - tiempo de frenado; período de oscilaciones
c¡,. - ángulo límite de ascenso
oi,* - ángulo límite de descensoa" - ángulo crítico de ascenso
0¡¡n, - ángulo límite de inctinación transversal0 - ángulo de inclinación al horizonte de la fuerza resultante que
actúa en la máquina suspendida en el plano longitudinal-r'erti-cal
tgan - ángulo de inclinación de la lfnea de resistencia a Ia tracciónen el gancho respecto a la superficie del camino
ó - ángulo de desviación lateral de los neumáticosr, - radio teórico de rodadura de las ruedas motrices
r - radio real de rodadura de las ruedas motricesR - radio de girop - radio de giro relativoI - batalla.B - ancho de víaá - anchura del eslabón de la oruga, anchura de la llanta de las
ruedasa - coordenada Iongitudinal del centro de gravedad deI tractor y
el automóvilft - coordenada vertical del centro de gravedad del tractor y el
automóvile- coordenada transtersaI del centro de gravedad del tractor y el
a utomóvilLo, - longitud de la super[icie de apoyo de las orugasL* - distancia entre los ejes de Ios carritos de balancfa de apo1,o
de las orugas

ar-l
hgun altura del punto de engancheh'gan- altu¡a del punto convencional de enganche
L" - batalla de la máquina suspendidaa*. - coordenada longitudinal del centro de gravedad del grupo sus-
pendi doár, - coordenada ve¡tical del centro de gravedad del grupo suspen-
dido
orugasS - reco¡rido
.S¿. - recorrido de aceleración§¡, - recorrido de lrenado
!n-fuerza de tracción nominal en el gancho del tractorótr - gama de tracción calculada del traitor
ón. ,, - gama de las velocidades principales del tractor
2. Cdlculo de los mecanismos del chasis de traclores y aulomóoiles
,4 - distancia entre centros de dos árboles conjugadosz - núme¡o de dientes de los engranaies; niméro de dientes de
engranajes helicoidales; núme¡ó de óstriasz, - número de dientes de la rueda motriz de las orugas
2t. ,. - número de entradas del tornillo sin finrn - módulo de los dientes; número de revoluciones del árbol sin-
crónico de toma de fuerza por I m de reco¡ridomn - módulo normal del engranáie de dientes oblicuosnr" - módulo frontal del en§ranaje de dientes oblicuos
I - paso del fitete del tornillo sin iinlr - paso.de de la hoja de ballésta; longevidad
calcu lad
-i. - relación la caja de cambio de marchasí01 - relación la serió planetaria
ih. "st -
relación teórica de reducción de la transmisión hidrostáticaIt, h. .. - relación teórica de reducción de la transmisión hidromecá-
nlcaio - relación de reducción de los engranajes dispuestos entre el ár-
bol de salida de la caja de calnbio'de ma'rchas y las-ruedásmotrices
i.6n- relación de reducción de la transmisión central lorincioalli, - relación de reducción de la transmisión lateral tiináij'- '
irn - relación de reducción de ta caja mecánica de la transmisiónhidrornecá nica
ic. h. - relación de reducción del convertidor hidráulico/.. d. - relación de reducción del mecanismo de dirección
no - frecuencia de rotación del árbol de la bomban, * frecuencia de rotación del árbol de la turbina
nm.h- frecuencia de rotación del á¡bol del rnotor hidráulicozutt - frecuencia de rotación del árbol de toma de fue¡za
ov. d - velocidad angular de giro del volante de direcciónn. - número de satélitesn - número de hojas de la ballesta
Iy5 - rendimiento volumétrico de la bomba
Iv,r., - rendimiento volumétrico del motor hidráulicoIr¡. d. - rendimiento directo del mecanismo de dirección
n'- ¿. - rendimiento inve¡so del mecanismo de direcciónd - diámetro del árbol; diámetro de la llanta del neumático
d". - diámetro medio de la unión a estríasdrod.- diámetro de los rodillos de apoyó de la oruga
r¡ - radio del tambor del frenor"ro - radio de la espiga en el engrane de Ia oruga
Ro - radio medio de rozamiento del embraguePu - resistencia del amortiguadorPo - f,uerza de compresión previa de los muelles del dispositivo de
tensión de la orugaQ - esfuerzo de presión en los discos del embragueP - es[ue¡zo circun[erencial en el círculo primitivo del diente; es-
fuerzo en el volante de direcciónS¡ - fuerza de tensado de la rama floia del [reno de cintaS2 - fuerza de tensado de [a rama tenla del freno de cinta
q - presión específica en los discos del embrague, en la cinta yzapatas de los irenos
Q náx - presión máxima del aceite utilizado para accionar el amplif i-cador hidráulico de la dirección
lf,n. r, - par del motor hidráulicoIf¿in - momento dinámico en el árbol del embrague principal
Memb. cal- momento calculado de rozamiento del enrbrague principalI4eq momento equivalente de cargaill¿t¡- par motor aplicado ala caja del diferencial
ü"n,b. g - momento de rozamiénto del embrague de girohI.o, - par motor en el engranaje de corona de la serie planetaria
M u, - momento transmitido por la brida de arrastre de la transnri-sión planetaria
Mpot momento de resistencia que actúa durante el giro en Ia palancade dirección
Mto, - momento torsor del árbol de torsiónM".t - par motor transmitido por las uniones a estriasIfr - momento de rozarniento del freno
Ilir. pt - momento de rozamiento del ireno de la transmisión planeta-ila
L - trabajo de resbalamiento deI embragueL". - trabajo específico de rozamiento del embrague; trabajo espe-
cí[ico de rozamiento del frenol.o, - número de pares de superficies de rozamiento del embrague
Q5 - rendimiento de la bomba
46 - factor constante de la bor¡baq* - [actor constante deI motor hidráulico

1( - número caracte¡ístico de la serie planetariaKain - coeIiciente de dinamismo
C - capacidad de trabajo del cojinetey - iaótor de la [orma del dienfe
y" - coeficiente que tiene en cuenta la irregutaridad de distribu-ción de la carga entre los satélites
ys=1 - coeliciente que tiene en cuenta Ia irregularidad de distribu-ción de la carga en las uniones a estrías
r - coeficiente de asimetria del ciclo de carga¡r - coeiiciente de cálculo de rozanliento de los elementos de fric-
ción de embrague y el freno| - tlexión de la ballesta (elenrento elástico)D - anchura de Ia hoja de la ballesta; anchura de la superiicie de
rozamiento del embrague y del forro de Iricción del [reno; lon-eitud del diente
/1n, - iargura de trabajo del árbol de torsiónua - velocidad de desplazarniento del émbolo del amortiguadoro - ángulo de contacto de la zapata del f¡eno (cinta de freno)
.[r. - ángulo de inclinación transversal de[ tractor de ruedas al arar0 - ángulo de torsión de árbolp -- ángulo de inclinación en la transmisión de dientes oblicuos;
ángulo de espira del tornillo sin iin; coeficiente de reserva delembra gue
flc. u - número básico de ciclos de cargaX - lrecuencia de carga
Q"o - ccrP. - esf I mecanismo hidráulico necesario pa-
¿"-i?a :}iliti, de elevación del cilindro delme sistema de suspensión del tractor
u" - velocidad media de desplazamiento del émbolo del cilindroSo - carrera del eje dc suspensión de la máquina suspendidauo - velocidad media de elevación deI eje de la suspensión
du. - diámetro de [a cavidad de trabajo del acumulador hidráulicodel sistema de suspensión del tracto¡
Introducción
cualidad de explotación en la eficacia total del vehículo, es ne-cesario establecer indices objetivos de estas cualidades, funda.mentados científicamente, y los métodos de su determinación. lJnaelección correcta de las cualidades de explotación y sus índices deevaluación, el conocimiento de la relación entre las mediciones
aracterizar la máquina, todo esto tiene una granel ulterior progreso técnico de la industria auto-
y_ el mejoramiento de la explotación del parquede tractores.
Las cualidades más importantes de explotación de tractoresy automóv.iles pueden ser divididas en cuatró grupos.
l. Cualidades que dete¡minan los ínCice§ técníco-eco¡tómicosde. los tractores y de los automóviles, en primer lugar, su tendi-miento y economía.
.2. Ctalidades propias de los tractores y los automóviles comovehículos.
r
ll

I
¿aooaaaeoc0c¡!ta¡¡I¡¡¡
r¡,il
Cualidades propias de los vehículos.
t2
La especificación de Ia metodología de dichos cálculos tambiéndebe incluirse en la esfera de los problerrras examinados.
Cualidades especiales de explotación. En relación con el tractorse deben tener en cuenta las cuaLidades agrotéul,icas, que deter-minan Ia adaptación del tractor a las exigencias tecnológicas dela producción agrícola. En los automóviles de turismo como cua-lidad especial de explotación se tiene en cuenta, por ejemplo, laconfortabilidad, que caracteriza la comodidad que ie brindá a lospasal eros.
La teoría de tractores g aLttomóaíles es una de las nnteriasque estudia las cualidades de explotación de los aehíct¿Los. Susobjetivos son: la elección y caracterizacion de las cualidades de
Una evaluación completa de las cualidades de explotaciónpuede ser realizada basándose en la combinación del análisis ile
El progreso técnico en la sociedad socialista se basa en elestudio sistemático de la estructura de las máquinas iabricadas,la generalización de la experíencia de sLr explotáción, teniendo encnenta los objetivos del Lrlterior desarrcllo de la economía sor-ié-tica. En estas condiciones el significacio de la teoría de tractores
t3

y automóviles tiene una gran importancia, ya que brinda cri-terios científ icamente f undamentados par a Llna evaluación ob-jetiva de Ias cualidades de explotaciói de los vehículos que sehallan en producción, para elaborar los requisitos técnicos paranuevas estructuras y para llevar a cabo las pruebas de los mode-los experimentales basándose en una metodblogía correcta.
Por ello es lógico que tanto Ia teoría de automóviles, como lade tracto¡es ha surgido y ha obtenido mayor desarrollo en laUnión Soviética. Un papel muy importante en [a creación de lateoría de tractores y automóviles han desempeñado el académicoE. Chudakov y el frofesor E. Lvov, que hari sentado la base dela escuela científ ica soviética en la rama técnica del automóvily el tractor. En la actualidad, en muchas instituciones científicasy docentes, en centrales de pruebas, en oficinas de proyeccióny otras instituciones se realiza el estudio y se buscan métodospara el mejoramiento de las cualidades de explotación de tractoresy automóviles. Un papel muy importante en ello debe ser desem-peñado por los ingenieros de mecanización agrícola. Un escrupu-loso estudio de las cualidades de explotación de los vehículos y unresumen científico de la expe¡iencia de su utiIización permitiráemplear mejor los tractores y automóviles en la economía ruraly plantear exigencias justificadas para el ulterior perfecciona.miento de su estructura.
Capítulo I
Balance de tracciónde tractores y automóviles
§ l. Determinación de los momentos de impulsiónaplicados a las ruedas motrices
El motor es la fuente de la fuerza ntotriz del tractor y delautomóvil. El par motor que el mismo desarrolla se transmite me-diante los mecanismos de transmisión a las ruedas motrices u
orugas. Siendo la frecuencia de rotación de las ruedas motricesconsiderablemente menor que la del árbol cigüeñal del motor, elpar motor aplicado a las ruedas motrices es mayor que el parque dessarrolla el motor. Llamemos el par motor aplicado a lasruedas motrices momento de ímpulsión y 1o designaremos porMi.p. En régimen estabLe de trabajo, cuando el tractor o el auto'móriil marcha unifo¡memente, entre el momento de impulsión Mt^py el par motor M- existe la siguiente dependencia:
fuI ,,no: M ^irr\r,
siendo it. : relación de reducción;
(l)
I,,: rendimIento mecánico de la transmisión.El par motor en la ecuación (l ) puede tener dif erentes valores,
dependiendo del régimen de trabajo. Para itzgar cómo y por quécausas éste varía, analizaremos las ca¡-acterísticas de los motoresde combustión interna para tractores y aLttomóviles.
Los motores para tractores tienen reguladores de.frecuenciade rotación, por ello, el estudio de los problemas relacionadoscon la teoría'de tractores se basa en las características de regu-lación del motor. En Ia iigLrra l, a está representada la caracte'rística de regulación de un motor diesel para tractores,- elaboradaen función áel número de revoluciones nm, r.p.m' del árbol ci'güeñal. En la característica están trazadas 1as curvas de la po-lencia efectiva del motor ^ly'", del par motor 114-, y el consumoespecífico de combustible g, por caballo de vapor eiectivo porhora.
Trabajando en vacío e[ motor desarrolla el máximo númerode revoluciones n\.ac. AI surgir una carga exterior, el reguladoraumenta la alimentación de combustible a los cilindros, despla-zando la cremallera de Ia bomba de combustible. Como resultado,
It
15

----II
máximo M*,ná*.En lo sucesivo, al clisminLrir la frecuencia de ro-c lasPdeV ^^d ;i:ica dispuestos a Ia izquierda deltiene el máximo valoi, se debeno. En estos sectores el funciona-
con una sobrecarga adícional
La curva de los consumos específicos de combustible g,, repre-sentada en la característica,.r i,Á..ioria para er urte¡ior anárisis
Fig' 2' caracterfstica de regulación -de un nroIor dieser para tractores en Iuncióndel par motor.
n del tractor a veces se utilizarrelaboradas en función del valore representación de las caractc-
2 3ar. 5-lg fl
s L/ Il I ¡ noninal o catculada det*l / ,- ll I I motor y.se designa por//n.\§l T---t< ll, I I A ella le corré'pohd. .i
desarrolla durante el fun-cionamiento con el regula-dor,
.se .denomina potáncia
9g l.rr curvas correspon-dicntes al trabajo del 'mo-tor en un canlpo de veloci-dade.s desde /xvac hasta nn
§l \ / | sonllamadas;;^;;";;;":S. l¿ \ / I I gutación de la caracterís.\§H I li:a.. En las curvas rV" ¡,
0L/ ve lU I I I las resistencias exteriores------;- /r'. acalrea la sobrecarga deló ' '6 motor y se acompaña de
Fig. l. Características de regulación de un una disminución intensivamotor diesel para trZctorei:'-- -" de la frecuencia de rota-
o -en. función d-e la Irecuencia de rotación del ción de su árbol. El f un-árbor; ó-en funcjón de ra poleñcia'eie-."ii;;. "' cionamiento -
;;i -
motor
trarscurrc sin la parric.ipación a.r r.gÍiiT,l,l-rrl'i" ::oi8ffjuÍ;cuenta la ínilu.n.io a"l'üiü.to"."i,';5. cilo, ros sectores crc rasstos a.la izquierda del punto not regulaciór¿. Durante lás sobrel
eramente aumentando un poco,la acción del corrector, que aa de rotación, aumenta lá ali-
cne,cia de rotación no, er par ,,oár'?t,tilT¿1":,jrl.,tiro".r''"j[.;16

motor se basa en las características de uetocidad, registradas es-
Fig 3. Característica de regr-rlación de unmotor dieseI para tractore§ con diversosreglajes del regulador de regimenes múl-
tiples.
tando abie te la válvula de mariposa, y en lascaracterÍsti parciales, registradas para diferentesángulos de a válvula.
La fig. racterística de velocidad de un motorde carburac.ión para a.utomóvi1es, registrada estando completa-mente abierta la válvula de mariposa. En la característica 'están
trazadas con línea llena las curvas Nr, M^ y gr. Las ramas delrazos de las curvas muestran como cambia Ía potencia efectíva,el par motor y el consumo específico cle combustible al haber li-mitador del número de revoluciones lfrecuencia de rotación). En
Fig. 4. característica de velocidad de un motor de ca.rburador registrada paraautomóviles con la válvula de mariposa completanrente ab-iei[i.
del. par mo.tor se interrumpe como resultado cler empeoramientode las ccndiciones de combustión.
nominal. En estos casos esracional la disminución de Iafrecuencia de rotación delárbol del motor con insu[i-ciente carga, embragando almismo tiempo en lá trans-misión un escalón más ele-vado para conservar la velo-cidad de marcha requerida.Siendo la frecuencia de rota-ción del árbol redLrcida, elmotor trabaja más económi-camettte, con Lln valor menordel consumo específ ico rlccombustibte (conscrvandolas mismas potencias). Lavariación del régimen de ve-locidades del motor se reali-
racterística de un motor die-sel para tractor con tresreglajes del regulador deregímenes múltiples. A cadareglaje del regulador le co-
$s\§
tI
rotación, durante er cuar r¿rs curvas I'.til"irXtr.iJ-rrllii'il::X i:la.ram.a sin regulación a la de regulación. para cada régimen develocidad en la característica se dan sus cur\ras,
1B
-nm
L-__
2^ I9

A medida que se cier¡a Ia válvula dela resistencia aerodrn¿ ma mentandoy, como del motorfe¡c.ia .r ae ra
-iá.t enren do n menor.rores de s los va-
ec u acíón:M^:716.2 &
siendo ff,:potencia^efectiva ¿.f ,rroii, CV,/rrn : freclrencia de ,."tr.;;;'.;;j, árbol cigüeña I,
adek,,ad
[ ,Hitr;1,1,ffi;3f:.li:.,,1T.-l: er ]renado de ros cirindros conla mezcla inflamable. , ."-1"" 1'^,L,:'rl:"""t' oe los c¡lindros consím u r t án ea men te en ?,l.il l?: ;:u:lgljl_..o1 ", ¡ * ¿ i.á1i',ly.n ¿osimultáneamente en ciórto gir¿,iii"rr.i'. u.u'.r er arre disminuyendoii.lo. Prra .l.urr.j coeficienrp ,^ "r^-r'l]i_lro
de combustib[e porciclo. Para elevar el ;'- -o'"-" rt ourrlrrrrsrr
^- ;r -;-l^*^ r- coetrcrente de adaptaciónen el sistem, d; ,.s;l;.jjn"á}"ái:§jrp:it',"_1 l.,gún el par motor,que ?! sobrecargañe el motor ,,,-o-*1u l?'l?t:.. un corrector,t I It i n i. üi'.::i5' lT,ii, #,"J,%1, i:f : :: :^ i I -' 11,
i
"'i' qi; "; ;' "; ;i l
ldaptl,l
ti I i o I' il ü3 ['ái:'L:] u,l, j:1 ."".
:,:.1 :: :1¿; i ; i ".
";r:. iJ; i;ores diesel para tració; hr;ir";;';;i;;
(3)siendo 1m : rTlotrenl:,1:.^,nf-.,.ia del volante y
La adaptacíón dno sólo elevando elcaracterÍstica ), sinode la energía cinétien movimiento del mde rotación del árbolser menor que el valor ns, que correspondede la curva del oar motoí, lbi.n.'áo.""qru[%t;,H":*o
leada^ para vencer rr. .oúrá.r.g,
+ 1,2.r.p.m.
Fig s' caracteristicas de vero.iaaolJllo. ,, motor de carburador para
Éru. : lÍm'n¿Y* lvln
(2)se denomína coeficiente d,e reserua der par motor y la reración
h.^: Mm"á*
tutn (2a)
20
; i,ry;j¡, i á, t J' a J i ii1 " tt?i,"#Íl:...r,,0 ;,. fj i i: _l :.;:¡al árbol cigüeñal,kgf m's2;
velocidades angulares delon y oo:velocidades. angulares del árbol cigüeñal, l/s, conIa. f recuencia Ai ,oia.iin riom ín¡ t r, ^r - ^ _. ._ . _
-_, ¡. vvuvrrLra utr roraclon nomínal y el par. áoi;;maxtmo, respectivamente. "--' rAI reducir las masasItica de la m¡", ,jr::,.prr^.t:-de la condición de que lacinética de la masi Hqrrs uE ra conolclon de que la energía
energías cínétina. ,^ i.^11.:d,l debe ser igual a Ir.iráu _á"
l.r"en ergía s cinét ic a s ¿e to áal li. ";; ;r"'.;-;t",h,'i#Tá *.",,f,tmotor.
,':,""*,i"T:' ]i l"i:'un. ff .on É, , ñ;;;'.',;";#::::,,1! ::' :,f^ d^1 :/:yt y ión der,m;l i',i n u,,,,siguiente manera:
uquyLuuLUrL aeI molor seoún las reaoluciones. lJtili-:lj1:"?:1.*coeficiente, puede i.ñ.*ir'.se ta ecnaciÁn ¡,e\ -¡^ r-ecuación (3) de Ia
(3a)A-Irr@'n (T)
del coefi.eleva llrEI valora en los
g 3:_lu variación del reglajcs ejerce inf luencia .n ei valorad ! .Ro. Cuanto más baio scs del motor, con ;.lr;id; ;i
2t

nominal, tanto menores son los valores de los coeficíentes Én¿y ko y, como consecuencia, es peor la adaptación del motor parasuperar las sobrecargas.
disminuye un tanto los valores de los dos coeficientes indicados.Volviendo a la ecua_ciól (1) s segundo
factor que influye en el valor del .sla re-lación de velocidades de la trans númerode la marcha que se embraga, el educciónítr será diferente, lo que permite variar cl valor del momento detracción cambiando las velocidades. Cuanto menor es el númerode la rnarcha or es la relación de reducción g con ellocorrespondtent ede ser maAor, stendo íguales 7as demáscondiclones, el de impulsíón.
El tercer f influye en el valor del momento de im-
elementos.
En correspondencia a la suposición admitida acerca de la cons-tanc.ia de las pérdidas en la marcha en vacío, es posible es-crib ir
-t trluu. , EMn- fuI* ' il.f- 'Iuu'
siendo fuIur":par de resistencia reducido alla transmisión, creado durantede [a transmisión;
árbol primario dela rotación en vacío
. De..la expre.sión. dada resulta que el coeiiciente rlvac váríá,depen.cliendo del
'alor de la parte de M^ apricada a lá'tiansmi-sión del par motor.
qc : rÍ'ql',siendo rlr: rendimiento del par cilíndrico, y \2: rendimiento
del par cónico;flr: flúmero de pares cilíndricos, y nz: número de pares
cónicos que trabajan en la [ranlmisión con-márchap ref ij a da.
. Para la. tecnología moderna de fabricación de engranajes paralas transmisiones de automóviles y tractores,
rlr :0,g8b j- 0,gg y Ic:0,g75 :- 0,g8.
, SLrstituyendo los v¿lores de ,r¡uac y qc. en la ecuación (4),obtendremos la fórmula siguiente pará iátcular ef iénáimientomecánico de la transmisión:
It,:rl1'rll' (, -#) Ua)
siendo Iu".: rendimiento, que_tiene en cuenta las pérdidas conla marcha en vacio;
I.., : rendimiento, que tlene en cuenta las pérdidas crea-das durante la transmisión de la carga.
22
, La dependencia del rendimiento mecánico de ra t¡ansmisiónde ta carga que ella transmite tiene carácter hiperbórico y puedeser
, represelta{a grálicamenje por- la curva r¡tr': l(M^), r.pr"-
sentada, en ,la .f ig. 6.. Los varorei de los pares'motoi'trá7á¿o,
"net e1e de abscisas del diagrama, están expresados en partes delpar motor nominal rVIo.
l¡.: lur.I6r, (4)
23

En lastipo comirncon cargas
transmisiones de los automóviles y los tractores, depor engranajes, eI valor del rendimiento mecánico,
próximas a las calculadas, se encuentra en los límitesrltr : 0,88 : 0,93. Los rendi'mientos de las transmisiones envehículos con varios ejes motri-ces, así como también contransmisiones helicoidales pue-den ser inferiores a los valoresindicados.
Determinemos el momentocle impulsión durante la mar'cha inestable, acelerada o retar-dada. El cálculo de su valordebe realizarse teniendo encuenta los momentos de inerciaque srlrgen en estos casos. De-sechando la influencia del ré-gimen inestable de trabajo enel transcurso del proceso def uncionamiento del motor, laecuación dinámica del árbol
puede representar en la sigLtiente
mFig.6. Curva de la dependencia delrendimiento mecánico de la transmi-sión del tractor del valor de la cargadel moto¡ (según datos de V. Nlala-
jovski).
cigüeñal en marcha inestable sef orma:
M'^: M^ - ,^2?,
siendo ML, y lvl^- pares motor transmitidos del árbol cigüeñaldel motor al embrague en condiciones iguales,pero en regímenes de funcionamiento inestabley estable, respectivamente;
: aceleración angular del árbol cigüeñal; para
el movimiento retardado tiene valor negativo.Teniendo en cuenta la influencia de las masas restantes, que
intervienen en la transmisión del giro del cigr-reñal a los órganosmotrices, así como también la masa de los mismos órganosmotrices, se puede escribir que el momento de impulsión en lamarcha inestable
fi,,, (ru* - ,^+)i,,r1,, - ,l-+i.*11, - ,, +:: Mr,np - (r, $ t,,n,, + 2t.+ i;)*-f ,,+), (6)
siendo 1.r: Iromentos de inercia de cada pieza giratoria de la" transmisión, dispuestas entre el motor y' los órganosmotrices, calculados respecio a su eje de rotación;
24
(5)
dorndt
-
t.
)l
3T
i:
: aceleraciones angulares de las piezas indicadas; po-
sitivas para la marcha acelerada, negativas para lamarcha retardada;
y \x: relaciones de transmisión y valores del rendimientomecánico de las transmisiones respectivamente, queunen la pieza dada con los órganos motrices;
/r: ITtoflleflto de inercia total de las ruedas motricesrespecto a sus ejes de rotación;
da.-*: aceleración angular de las ruedas motrices con el
signo correspondiente.Expresemos las aceleraciones angulares de las piezas en ro-
tación a través de la aceleración lineal del vehículo ¡ : +i,siendo u la velocidad de avance del vehículo.
Cuando el cigüeñal del motor, la transmisión y los órganosmotrices funcionan como un conj unto cinemático entero, enton-ces la aceleración angular del cigüeñal se expresa:
d@^ dorir, darit, rr dct it, , il,
-::-r-::r-
dt dt dt rt dt rr trr'
siendo r" - radio de rodadnra de las ruedas motrices.El radio de rodadura puede tener diaersos ualores como con-
secuencia de que el camino regorrido por la rueda al dar unavuelta puede variar a causa del resbalamiento y la deformaciónde los bandajes. Pero, ya que la variación del radio de rodaduraacarrea simultáneamente una variación proporcional de la acele.ración i, Ia relación obtenida entre la aceleración angular delcigüeñal y la aceleración lineal del vehículo conserva su valor,independientemente de la magnitud real del radio de rodadura.El problema de Ia diversidad de lcs radios de rodadura de lasruedas y de la exactitud del valor del r. será en adelante anali"zada más detenidamente.
De modo análogo a lo anterior, se puede obtener que
da,dt
dtt, ,1,dl t ,,'
da, ¡dt rt
Haciendo las sustituciones correspondlentes en la ecuación (6),obtenemos:
M'¡, :,\rt, - l¡vifu! : ML, - tur¡,, (oa)
25

siendo M¡,: iI.ifrrtr * 2l *i2*r1, { I,
rf momento total de las [uerzas
tangenciales de inercia, reducido a las ¡uedas motri-
Para una transmisión f iable del par motor, el momento defricción calculado del embrague I,i.^¡ cal se debe tomar con cierto
§ 2. Fuerza tangencial de tracción y reacciónde impulsión del camino
La transmisión del momento de impulsión entre las ruedasmotrices y cl camino provoca el surgirriento de las corresponclien-tes reacciones tangencialcs. Estas ¡eaccioncs están orieniadas endirección de la marcfta deL aehiculo y 1o impulsan hacia aderante.Por ello, Ia resultante de las reacciones iidicadas se denominareacción de.ímpulsi,ón o fuerza de impulsión, La designaremospor X., y el brazo sobre el cual acciona esta fuerza en" relaciónal eje de giro de las ruedas lo tomaremos como el radio r.. Comoya se dijo, el valor de este radio será precisado más adelante.
2627
Como brazondmico).
En caso
de la fuerza X. 1o llamaremos radio de fuerza (di'
general de marcha
u _ Mi^o- Mi, _ Mi^p- M¡, - M¡,
-\-t
siendo Mfr: momento necesario para superar larodadura de las ruedas motrices; elha sido analizado anteriormente.
&f t.oLa razón -.. se denomina f uerza tangencíaL de tracciÓn
en marcha estable. Designándola por P¡- transformaremos laecuación anterior en la siguiente iorma:
M,- + M._v _D. _ ir /r
'f
(7)
resistencia a 1a
significado M;,rit,íl
F
I
Al determinarse la luerza de impulsión de la oruga, es nece-sario tener en cuenta qué parte del momento de impulsión seemplea para vencer las pérdidas internas en las orugas. Aquíentran las pérdidas de frotamiento en el engranado de las ruedasmotrices con los eslabones de las orugas, en 1a articulación delos eslabones, en los cojinetes de los rodillos de rodaje, los rodi-llos de guía y las ruedas tensoras, las pérdidas durante el rodadode los rodillos de rodaje y los rodillos de guía por el plano deguía de la oruga, en el batimiento de la oruga, etc. Designaremosél momento de resistencia, que surge como resultado de lo ex-puesto, en las ruedas motrices de la oruga con Mr.
Durante la marcha inestable surgen también las resistenciasde inercia de las piezas de la oruga. Los sustituiremos por el mo-mento de inercia reducido a las ruedas motrices M¡o,. En marchaacelerada tendrán valor positivo y negati\¡o, en marcha retardada.
Teniendo en cuenta las resistencias indicadas, la fuerza deimpulsión de la oruga se expresa en el caso general con la ecua-ción siguiente:
Xr: Ptc,lvIt,+ltt*IIio,
f,(8)
El valor máximo posible del momento cle impulsión no dependeírnicamente del motor y el número de la velocidad en Ia transmi-sión, sino también de la adherencia de los órganos de impulsióncon el camino. La iniluencia de este factor se condiciona por elhecho de que al transmitir el momento de impulsión en la super-ficie del camino y en el suelo surgen tensiones tangenciales yotras, cuya magnitud no puede exceder los limites permitidos porlas propiedades mecánicas del pavimento o por la solidez mecá-nica del suelo. En caso contrario, el vehículo pierde su capacidad

$i,l',';;'"'tnto a causa dcl resbalamiento cJe los órganos rle irn-
,rr!r".'rooÍ'"; !| llr"t':::i'- -sobre .los valores der coericiente de;;r,ii;i";; *¿.",.r,o1 orga nos motrices, trrni¡ inao "Ji,.,j¡u..ro.
blas I y 2). xrno y campo, se dan ér' ái-ipE',ia¡l. (ta-Teniendo en cue¡ta la gran cantidaen la magnitud de
H ri $.# ff , j*h!il:l ;,., r ,,, [i{-{ l:ill{? #l*kis
§ 3. Fuerzas de resistencia a la marcha
,url,Ttl.'ffrJij;':':-rle,impulslgn x"t en el tractor o el auto.I i i u a n! i r, L,)t,' ¿.o
i#§ +] F:l i :l,t' .,?
fl r H : ; li ¿:l; :,t icaso más generar cuáres son .riui- frierro. cuando Ia marcrra
D-y
siendo I/r:r€ácción. normar del camino en las ruedas motrrces.Durante el trabajo_de_ urig;rgr"ias tensior.. co..u.pándien-tes en et suelo se cróan por ta ¡uiiio ;; i;;;í;;j, ?",,,lill "rr",durante la marcha estable es igual , pts_f . n"," consiguíente,
la fuerza tangencial de tr.acción máxima, posible de la oruga, sc-gún las condiciones de adherin.iá ."r'I_a ecuación:
qE qu¡rL, E¡rLrd uult el camlno, Se expresa con
Pr: Q)'.,
Pq:x,.d*++:rv+*,
(e)
(ea)
Pga;
Fig.7. Esquema de Ias fuerzas de impulsiónactúan en ei automóvii -en
el i,giJ'ilI[:iiasrde resistencia quc
I
(
I
IIIa
a
a
aaaaer¡erl(¡
Xr
siendo Xr.r*: fuerza máximapor completo lacamino;
de impulsión obtenida utilizandoadherencia de Ias orugas con el
Ias iuerzas siguientes:las ruedas trir.ür, qre es la
!'"?
'irt¡*
28
il,.
s¡r
fíIttiI*i¿
29

reacción X¿ QLle surge entre el camino y las ruedas delan-teras bajo la acción del esiuerzo de impLrlsión, aplicado a
las ruedas delanteras a través del hastidor del vehículo; lareacción X¿ es paralela a la superficie de la vía y está di-rigida en dirección contraria a la marcha;peso del automóvil G;f.uerza de inercia Pi, Que surge a consecuencia de la velo-cidacl variable en 1a marcha rectilínea de avance del vehí-culo (los momentos de las fuerzas tangenciales de inerciade las masas g[ratortas se tienen en cuenta al determinarselas fuerzas X. y Xo) . En el caso qlle analizamos de marchaacelerada la fuerza de inercia Pi se opone al movimiento;
5) resistencia del aire Pr.;6) resistencia de tracción Pgan cr€áda por el remolque.Analicemos cada una de estas fuerzas de resistencia por se-
parado.La reacción X¿, Que acciona desde el camino sobre las ruedas
delanteras en movimiento, puede ser determinada partiendo dela condición de que ella debe crear un momento, en relación cone1 eje geométrico de Ias ruedas, capaz de hacer girar estas rue-das.
La conctición indicada puede ser expresada con la siguienteec uación:
Xdt,: M¡a* M¡al lvIr,
siendo M¡¿: momento de resistencia a la rodadura de las ruedasdel anteras;
Mi¿:momento de las fuerzas tangenciales de inercia delas ruedas delanteras que surge como consecLrenciade su rotación con velocidad angular variable;
Mr : Irrorrento de f rotamiento en los coj inetes de lasruedas.
Como regla general, las ruedas delanteras en los automóvilesy tractores están montadas sobre cojinetes de rodadura, por ello,cl momento de frotamiento NI, es harto insignilicante y puededesecharse. Admitiendo esto, obtendremos de la expresión ante-rio r:
,, Nfd+ bltd,r
La f.uerza del peso G, aplicada al centro de gravedad clel auto-móvil, puede ser slrstituida durante la marcha en ascenso por doscomponentes: G cos c¿, normal a 1a superlicie del camino y G sen a,paralela a la sLrperf icie de1 camino. La primera aprieta Iasruedas al camino y, como consecuencia, surgen las coirespon-clientes reacciones normales en las ruedas (en el esquema no sedan) y se crean los momentos M¡, y IVI¡¿ de las ruedas que seoponen al g[ro. La segunda componente G sen cr, está dirigida en
30
2)
3)4)
(i 0)
dirección contraria a la marche Y
hÍculo.La f,terza de inercia total P¡,
móvil en movimiento recti[íneo de
durante la investigación dinámica
siendo ár:E-t-
obstaculiza el ascenso al ve-
de todas las piezas del auto-avance, puede ser calculada
general por la fórmula:
Pt: (l l)
siendo : aceleración de ca ída libre;
: masa del automóvi[;
Pu: h*FZ, (12)
el así llamado coeficiente reducido de resistencia delaire (coeficiente aerodinámico), kgf .s2lma;
área frontal del vehículo, o sea, la proyección delcontorno del vehícLrlo en el plano perpendicular a lasr-rperficie de la marcha, nz2;
u: velocidad de la marcha, m/s.El coeficiente de resistencia clel aire es la resistencia clel
medio aéreo sobre 1m2 de Ia superiicie Irontal del cuerpo de unaforma dada que se mueve a una velocidad rle I m/s.
Si en vez de m/s expresamos la velocidad en km/h, entoncesobtendremos la fórmula que comúnmente se emplea en los cálcu-los de automóviles:
(l2a)
3i
G
Vl,6
Go*
&
guiente:
ho,Fv2 _ k(,Fv2(3,0¡: - 13
P_:

ú es Ia velocidad en m/s; Z es la
¿ll,H';il.Jfl.¿+*:i,rf,',,1Tft fTJ'l;',*ilXi:'o'n' F' m2, se puede catcurar aproxi-
F :0,T7SA . Hsiendo A v H: anchLrra y altura del coche respectivamente, m.Para lós camiones g.nárulr.nt.'r. utiliza Ia fórmLrla
F:B.H
I g.ancho . del automóvil hav
:'i:i :-'- 'Te¡ta'b'le'Y aur"té¿ ái' r I'H?l¿fl :,
of ,"..:,"1.1,j.1.
, j,,..,-,t,..,i:,;,¿:,...".r,,,:
1.;racción como Ias de otrosledto pata las condicionei
32
§ 4. Balance.de tracción y ecuación diferencialde marcha
f :áfJii¿:l.o i:i,:"::::.:,t:1 _..!t re I os p.rirn eros p a réntes is s e
l,:. i., l" ?i IXTÍ I; .."1
I : : ;:* :il;le, ¡ J;"",, i, i;llj, o
I :. l:: ij i. ;::i: I :
I i, :iiJ,i:, i j. 11, jl;[i',. r;] i * t':.t*l::, "ffi !!
:mos esta fuerza por p,. lá'-*].i.ñ:j;"' , cunoucrdas. Designe-.ionai-a- lá-irri.tíue anriet¡ r," .,,^.r^1
la roda.dura- es propor-cional a la cargá que 'aprieta r;;-;;;;r: ;1 ::;il::r.it rBiil,?l,iZ )|,¡i;:;;o': ,X)2,:1i,f.i T:t¡r:;i;; -"e denomi na coericientede reststenc¡a d ta ,á¿áZ',7á. ';;i;';J'i:l. -'e 0enomina coef icicaso. que examinamos, las * rd¡q ,^, ']fl|^Lt?n,la Ietra
./.. E
Xr:X¿fGsenu*pt+p,+Pgan.
Sustituyendo en est¿¡nión t7\ ,^ ,,.^__] expresión la f.uerza X,:::*ii ir), ,u iuü, Ír"p*"1,'i.áiJJ'i"^i,o:: ,',1,::l',.,:l 1.1
I ::fl"o", J, ^::.1r....0"n d i enie :;;d; r¿,?i ¿u rr.
ec.uac.ión (10), ydremos la ecuación del ¡uluñ..'¿. "ira.ción términos, obien'-
en la f orma si-guiente:
En el
3, ; ;, Hl fi ; : * X **, * il:{ : 1:: i;:,'J :*';,:. ii; i : } 3 Í "..,. ? llq¡L¿q uE 15ttr coellc
serán analizados con más rin analizados con me' J.ir-ú.'. ;"; i;;';iü,#,'.J"Jixl;,lro'J ét,5tlmemos la resistencia a Iá i"ár¿r.r'p, u l^ racior^-^i^ ¡-uLrrrtr,los ta reststencia a la rodaclr R---..."" rqp,rur
ascenso G sen a. como resultado "nr^.,i'"1-li y-la resistelcíq
.dqascenso G sen a. Como resultadá, .r5l;;;;;;rr. ir,ir;lt,r:a,la ntarcha e jercicla por el ca¡nino I q rto"i_-
caso. que examinantos, las ru:das- dJ-"'""' Lvtr Id rerra r. L,n el
caminó ..; ü.i;;;;,^ G "n" _ A^ ^^..---,aLrtomóvil se apri,etan áicamino con Ia f uerza ó .;. ;, á. ,.r.i¿'trtullrovlt se aprietan al
De eSta _rno.r]* " rvo w, utr acue¡-Oo COn eStO p¡: lG COS A.De esta manera:
9+ry:P¡:fGcosq.f, ' f, '¡-l
H;.ÍT?,,?ll:.]:: ::1",i::^.q:l coeficiente de resistenciarodadura / en diversas condicio;;;;;".'''trrte oe resistencia a la
f,.,, ;ll :1, :f ,,1* _i¿ trl'! y: ij :'1
":. r.;[ l,# J :á,TX,: f,l i I :il;
obtendremos:stencia tolalca¡nino. La desirgnaremos por p,¡ y
I
I
(
IIII
P¡: fGsen q * G sen a, : G (fcos o f sen o) : rpG,ü: coeftcicnle recluciclo cle la resistencia det cantitto
33
siend o
-a
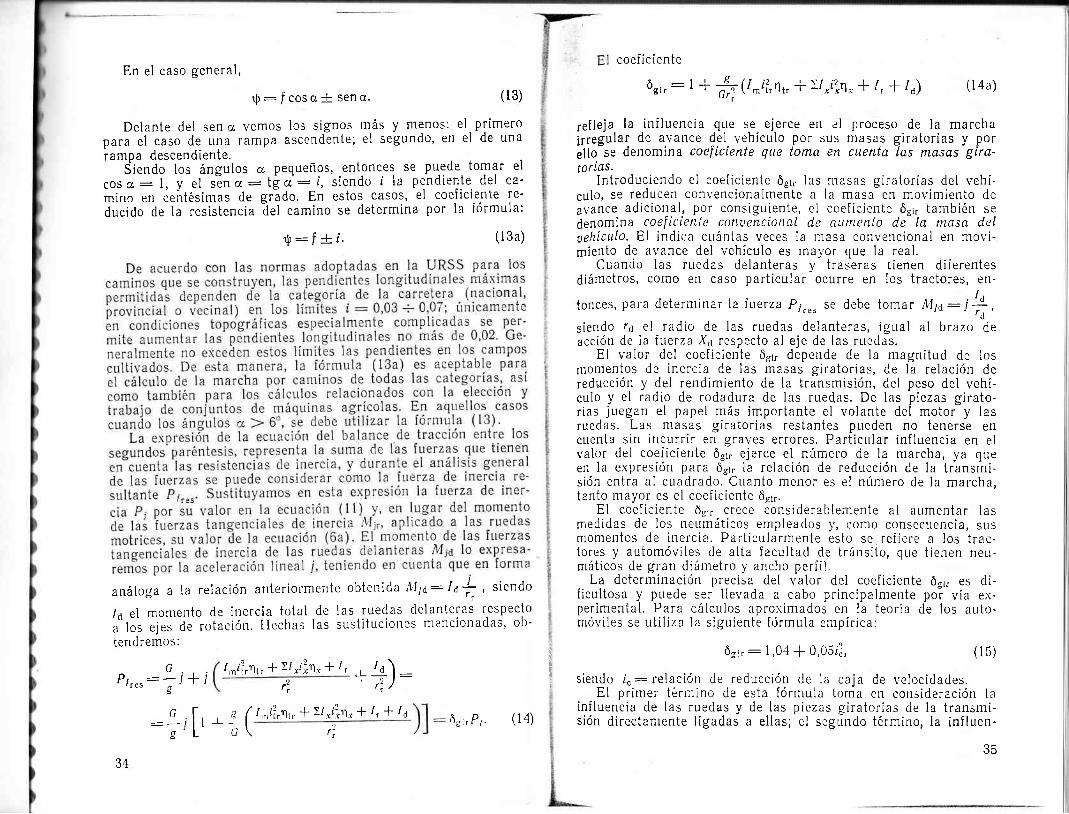
Delante del sen a vemos los signos más y menos: el primeropara el caso de una rampa ascendénte; el segundo, en el de una
rampa descendiente.- §i.náo los ángulos a pequeños, entonces se pu.ede. tomar el
cos v.: l, y el sén o: t|a: l, siendo i la pendiente. del ca-
mino en ceñtésimas de grádo. En estos casos, el coefici-ente re-
ducido de 1a resistencia -del camino se determina por la fórmula:
En el caso general,
P/r".
q¡:fcosstseno.
q:fti.
I-ii.tl¡. ¡ 2l ri2*n, * l,
(13)
(1 3a)
análoga a la relación anteriormente obtenida hlp-'rt, siendo
/,1 el momento de inercia total de las ruedas del anteras respecto
^"f át á¡.i áe ioiación. Hechas las sustituciones mencionadas, ob-
tendremos:
G
--1 J
c
'f
*;(
_LiIJ
['
,)
'f
l,niirrlt, * X/."12"¡.
+ +):r; ,/
+1,+IdIJ
JÍ
34
ñgi,Pr. (14)
35
coefi ciente
ós¡, :, * É(1*li,t,. + t-l *i2*\,* 1, * 1o)
refleja la influencia que se ejerce en el proceso de la marchairregular de avance del vehículo por sus masas giratorias y porello-se denomina coeficiente que toma en cuenta las masas gira-torías.
IntrodLrciendo el coeliciente ógrr las masas giratorias del vehi-culo, se red[cen convencionalmente a la masa en movímiento deavance adicional, por consiguiente, el coeficiente ógi,.también se
denomina coef tctente conuenc¡onal de aumento de la masa delaehículo. El indica cuántas veces la masa convencional en movi-miento de at,ance del vehículo es mayor que la real.
Cuando las ruedas delanteras y traseras tienen diferentesdiámetros, como en caso particular ocurre en los tractores, en-
tonces, para determinar la fuerza P7r". Se debe tomar M¡¿: iLt ,o'siendo r¿ el radio de las ruedas delanteras, igLral al brazo deacción de la fuerza X¿ respecto al eje de las ruedas.
El valor del coeficiente óg1,. depende de la magnitud de losmomentos de inercia de las masas giratorias, de la relación dereducción y del rendimiento de la transmisión, del peso del vehí-culo y el radio de rodadura de las ruedas. De las piezas girato-rias juegan el papel más importante el volante del motor y lasruedas. Las masas giratorias restantes pueden no tenerse encuenta sin incurrir en graves errores. Particular influencia en elvalor del coeiiciente ógrr ejerce el núrnero de la marcha, ya queen la expresión para ógr. la relación de reducción de la transmi-sión entra al cuadrado. Cuanto menor es el número de la marcha,tanto mayor es el coeiiciente 6gir.
El coeliciente 6gir crece considerablemente al aumentar lasmedidas de los neumáticos empleados y, como consecuencia, susmomentos de inercia. Particularmente esto se refiere a Ios trac-tores y automóviles de alta facultad de tránsito, que tienen neu-máticos de gran diámetro y ancho perfil.
La determinación precisa del valor del coeliciente ógrr es di-ficultosa y puede ser llevada a cabo principalmente por vía ex-perimenta[. Para cálculos aproximados en la teoría de los auto-móviles se utiliza la siguiente iórmLrla empírica:
ógi,:1,04+0,05i:, (15)
siendo i":relación de reducción de la caja de velocidades.El primer término de esta fórmuia toma en consideración la
inlluencia de las ruedas y de las piezas giratorias cie la transmi-sión directanrente ligadas a ellas; el segundo téimino, la influen-
(laa)
I{¡Iti

cia de las masas en movimienio del motor y las piezas giratoriasrestantes de la transmisión.
La .fórmula (15) se ha confeccionado para automóviles sincarga de los tipos principales de fabricación én masa. para vehícu-los cargados con un peso C', se transforma de la manera si-guiente:
ógrr : I + (0,04 + o,o5r:) #. (l5a)
. El miembro ógr.P; puede tener signo más o menos, dependicndode que ln marcha del vehículo seá acelerada o retariada. Tc-niendo en cuenta esto, escribiremos la ecuación definitiva der ba-lance de tracción:
EJE,\IPLOS DE CALCULO
dertarr I.Xi*1";L!:.,1"0";,oi;sin l¿a¿ uniforme -constánte.
IJS. y la rcsistencia a la ro-y comparar estas fuerzas
El.peso.del l'ehículo G, eI coeIiciente de resistcncia a la rodadura f, ra ve-locidad máxima de la marcha /*¿*, er ¿r., riontli r y .t'ü.ii.i..te'a'erodiná-mico it, están dados en Ia tabl¡.
((IIIC
(((((C
(((((((((
(
(
II(
IIIIIII
Ptc: P,¡ -{- ógi,P7 * P, -F Pgun. ( l6)
en lospor la
(l5b)
Cam ión
En la teoría de los automóviles esta ecuación con frecuenciase expresa de la siguiente forma:
du C .^ D §D
;: ¡,ia (P'u - P,¡ - P,- Pg"n): *ffi , UT)
y se denomin.a ecuactón diferencial del ntoainúento. AquÍ Xp. esla suma de las resistencias exteriores que sufre el véhículo enlas correspondientes condiciones de la ma rcha estable.
La fue¡za P1g en las ecuaciones (16) y (lT) expresa la fuerzatangencial de tracción desarrollada por el vehículo en caso dela marcha estable en las condiciones dadas.
Siendo IP. ( P1., entonc "t # es positiva y el vehículo mar-
cha con aceleración; si XP. ) Ptg, entonces la marcha clel vehi-culo será retardada.
La ecuación obtenida del balance de tracción es válida tam-bién para los tractores de ruedas y orugcia de que el miembro P,, en estos casoya que la fuerza de la resistencia delcausa de la pequeñez de las velocidadesvada.
El coeficiente que toma en cuenta las masas giratoriastractores se puede determinar para cálculos aprórimadosfórmula empírica sigLriente:
ógr,:1,15+0,001i;,.
La resistencia del ai¡e se determina pcr Ia fórmLrla (l2a)
, _ k.FV.^e*l3
La resistencia a la rodadura:
Pr: ¡G.
resistencia a la rodadura paracalculemos a qué será
Los ¡esultados de
igual lr relación # . tOOl¿.r¡Ios cálculos se dan en Ia siguiente tabla.
P,ara.comp.arar cl _papel que juega la resistencia del aire v Iastencia a la rodadura para las iondiciones de triUa-io-'Jrár.,
Ve h f culoP¡, kel
36
II
Vrlores de Ios dllo" Iniclrles
t/-' tnJr.kmi h
Automóvil
l'alores de las nragnitudes calculadas
Tracto r
L3m lon
A utornóvi I
37

alance de trac-orra los autr¡'i'elocidad má-del coeficiente
e la forma del
vehlculo.É¡.?pfo 2. Un tractor de oruga ma¡cha por un camino de tierra seco con
remolques de ruedas. ^^t.á ,,on¡pr pldos reholques de ruedas.Hl"';::!].i'i't=J'tli.in"r [a rampa máxima ,,n5" Qü0 podrá vencer el
iractor, moviéndose a velocidad unifoime con la marcha preiiiada' empleando
for coárpleto la potencia nominal del InotorDatos iniciales:l. Peso del tractor C : 3800 kgi.
G.",.2. Coeticiente de peso del tren É,: # :2,5' siendo Or"o : peso total
sistencia a la rodadura. del tractor, condicionada por las pérdidas interiores en
iá orugr, que aproximadamente tomatnos:
lt_-j:0'5lotf
Haciendo Ias sustituciones correspondientes, hallamos que;
P*: qG + 0,5iG : o (a + 0,51) : 3800'0'e35 :3550 kgf.
tractores.Datos iniciales:l, Peso del tractor G : 1700 ltgi.2. Relación de reducción de [a transmisión con [a marcha que examinamos
itr : 40 y su rendimiento 4,, : 0.9.' 3. Válores de los momentos de inercia de las masas giratorias respecto a
sus eics de rotación, kgf 'm ' s2:- á) ¿et volante y'ótras piezas en movinriento del moto¡ reducidos al árbol
cisüeñal l^ :0,22." b) de las ruedas traseras It:2,8; de las ruedas delanteras /¿:0,25'4. Radios de Ias ruedas, m: traseras r¿:0,54; delanteras r¡:0'31'Basándose en la fórmula (t4a), desechando las masas giratorias de la
transmisión, ya que su iniluencia es peqLreña, y teniendo en cuenta los distintosvalores de lol radios de las ruedas delanteras y traseras, tenemos:
:, * h(,.,;.r,, + /, +,, f):: I + ,,oo+S¡r (o,zz'+o' ' o,e + 2,8 + o,z; ffi) : z,z
Por la f órrnula emPírica (l5b)óg¡r: l,l5 + 0,001 ' 402 --2'75'
De esta manera, por la [órmula empírica recomendada, elaborada conarresto a los orincipales rnodelos de tractores soviéticos de cuatro cilindros, el
valo? ael coeticienté óei, ha resultado considerablemente disminuido; por ello,como se ha indicado airil¡a, esta fórmula en el caso dado es inaceptable.
G-"
a la rcrdadura: del tractor f : 0,07; de los re'de los romolques.3. Coeficiente de resistencia
molques i'.^ : 0,04'."-'T'-páióii.ia nominal del motor del tractor
cia de rotaciófl ¿q : 1500 r. P. .m..5.'ñ;1;¡l¿; ae reducción de la transmisión con la
No : 50 CV para una [recuen-
marcha dada ít" : 3'12
V SLl rlLr : 0'9'lds ruedas motrices de la oruga r' : 0'365 m'
. a" ,¿ñ"..ncia de la ortlga con el cam-ino.a:0'gtu,.ri.i.n.iu áel aire repiésentaremos el balance de tracción
del fornra siguiente:
P¡, : Ic * I,"*G..* + (c + c."'.)ln,á* : c (i + I'"*Ét) + c (l + Ér) i'o¿''
De la ecuación del balance de tracción tenemos:
P,o- G (i * ]l."*&t) Pts -o,l7Glmáx : ---zTTTt)- : --rra '
Determinemos la fuerza de tracción tangencial desarrollada por el tractor
en las condiciones dadas:
D _7l6,2N,ritr\ - 716,2 ' 50'3L2 ' 0'9 : lB35 kgf.r,s:--iÍ-: -t¡oo ¡,eos
PoniendoelvalorobtenidodePtgenlaecuaciónanterior,hallaremosque
i :1835-0,17.3800:0.09 ó s=5.10,'m aL
Conlprobentossipuedeeltracto¡conlosremolqucssubirsemejanterampa,.n¡i"i.!' .o"i'üi"nL.'?. áiú.;;;.i, de Ias orugas con el .camino. De ¿cuerdo
:;i"i;'.*;;i¿n tgul, re-rue"a áe ttatción tangéncial máxima que puede desa-
iiáif ar ii-ii*iár'i.' brugo- i.g¡n -trt
.ondi.ionés de adhcrencia con el canrino:
tI-P*:r¡,Y + t .
En esta [órmula Y es Ia reacción.no-rmal clel camino *!'-: lu.: !l!Ca9 d9l
t¡actor. Ctrnsiderrndo q* áf áng'io de la rarnpa a es pequeño' y sLrponiendo
;;,;'í; tf;; ¡; fo ,.tiri.n.io"¿l: ü*ciOn de ios rernolques es paralela a laJr¡;.iü.ü'd;r .*ino' es posible tomar Y - C
El segundo término de la iórmula 11 ¡igtt en cuenta la parte de la re-
3B

§ l. Propiedades fisicomecánlcas del suelo
Por su designación tecnológica, los tractores trab-ajan princi'palmente en ei- campo. Una parte considerable del transporteáutomóvil en la agricultura se realiza por camino-s de t-ierra yrurales. En todos eétos casos, como base portadora de los órganosde impulsión sirven las capas sLrperiores de 1a corteza terrestre,es deóir, el suelo. Por elló, el cónocimiento de las propiedadesfisicomecánicas del suelo y la naturaleza de los procesos que
tienen lugar durante la acción recíproca de Ias ruedas y las oru-gas sobró el suelo, tiene una impbrtancia detisiva para la ela'6'oración de la teoría de vehículos terrestres de tracción y trans-porte. Sin embargo, la gran div los y. múltiplesiactores que influyen en sus pro [a elaboraciónde depenilencias feóricamente fu podrían carac'terizai las propiedades mecáni slls diferentesestados y,con áiversas cargas. a mecánica de
los terreiros no dispone aún de suficientes datos sobre estos-pro'blemas, y tos existéntes tienen, principalmente, carácter empírico.por coniiguiente, es necesario limitarse sólo con algunos datosque son dé interés desde el punto_ de vista de este análisis.' Las condiciones del suelo se determinan por un complejo de
propiedades físicas y mecánicas.' ilntre las propiedades físicas las fLtndamentales son:a) estructúra'del suelo g su composi.cíón granulométric.a, por
Capítulo I I
Dinámica general de tractores
de ruedas y autornóviles
qú. .. entiende el conteñido en tantos por ciento en el suelopartículas duras de diferente tamaño;b) densidad, que depende P?ra un estado determinado .del
suelo de su composición mineralógica y de las sustancias orgáni-
40
Al acciortar los órganos motrices del vehículo en movimientosobre el terreno, éste se somete a la compresión (compactacíón\g desplazamiento en diierentes direcciones; como resultado, en elsuelo se crean campos de tensiones normales y tangenciales, quese propagan hacia el interior y en diversas direcciones respectoal lugar de aplicación de la carga. El valor de las tensiones y sudistribución en las capas deformadas del suelo depende, tanto delas cargas que actúan y de las condiciones de su aplicación, comoen grado considerable de las propiedades físicas y el estado delsuelo. De la facr-rltad del suelo de resistir las cargas citadas de-pende la profundidad de la rodada hecha por las ruedas y las
la resistencia del suelo a la compre- L S I (sión g aL desplazamiento.
Cón innumerables ensavos. reallza- 0L- t C'
suelo. En el sector ^l la curva se asemeja a una recta inclinada, .en esta sección tiene lugar principalmente la compactación del I
cuencia, el crecimiento del asentamiento paLrlatinamente se hacc .más intensivo. En el sector III comienza el desplazamiento plás- I
arlopta convencionalmente que el asentamiento del suelo aumenta asin elevarse la carga exterior.
Los índices prin.ipái.i -de
la resistencia mecánica del suclo a
lode
,a
a
'a,a
4l
ltl
il
que determinan su resistencia a la compresión son:

-7--
t§§¡§,
t, §T,J.. I -ó, tgr/cn,
,€ - coeficienie de la compre-sión volumétrica del suelo,ligl/cm3;
po- capacidad portante límite del suelo, kg[/cm2, que deter-rnina la magnitud de la presión especíiica para la cual el asenta'rniento del suelo comienza a crecer sin que aumente en lo suce-sivo la carga veriical que acciona sobre el mismo.
Acerca de los valores de estos índices, hay muchísimos datosen publicaciones especiales y manuales de inf ormación co¡res'pondientes.' La resistencia del suelo al desplazamiento está condi-cionada por dos factores: las Iuerzas de cohesión molecularde las pártícLrlas clel terreno, y el rozamiento entre dichas par-t ícul a s.
La cohesión se manifiesta principalmente en suelos glutinosos.En terrenos con estructura granulada, areuosos y areno-limosos,
las fuerzas de cohesión son insignifi-cantes. La naturaleza de las fuerzas decohesión puede ser diversa. La humedady la existencia en el suelo de lraccionesarcillosas, coloides orgánicos u otrassubstancias glutinosas naturales jueganel papel fundamental en la cohesiónentre las partículas.
El rozamiento interno entre las par-Fig. 9. Curva de resistencia tículas del suelo surge a consecuenciadel suelo al desplazamiento. de la ligazón mutua entre las partícu-
las durante sll desplazamiento. Estepuede únicamente aparecer al accionar sobre el suelo presionesnormales y hasta cierto punto depende de su valor. Los roza-mientos internos más consiclerables se observan en los suelosarenosos y areno-limosos, compuestos de partícrrlas rugosas conirregularidades relativamente grandes,
En el caso general, la resistencia al desplazamiento se deter-mina por la acción de los dos factores citados y puede ser carac-terizada por la curva representada en la fig.9, donde en el ejede abscisas se dan las tensiones normaies del suelo o, y en el ejede ordenadas las tensiones tangenciales r qLle provocan el des-
suelo. La curva se inicia en el punto o, en el queal sobre el suelo es igual a ceto y la tensión tan-ro Se cleá por las fuerzas moleculares de cohe-
ento ulterior de la resistencia al desplazamientoestá supeditado al rozamiento entre las ¡;artículas del suelo. Enlos terrenos arenosos secos rs : 0, por ello, su resistencia al des-plazamiento se determina por las orCenadas de la curva en rela-'ción con el eje de abscisas lrazado por el punto a. En los suelosmuy glutinosos, el rozamiento entre las particulas no juega ttnpaflel-importante y para ellos la curva dada puede ser sustituidapoi Lrna recta trazada por el punto a paralela al eje de abscisas.
42
Los dos ejemplos analizados son casos extremos; en la mayoríade los casos los suelos tienen estructuras intermedias'
Dependiendo de su estado, las propiedades mecánicas del suelopueden variar en amplios márgenes. La ma_yor influencia en laiesistencia mecánica del suelo lá ejercen Ia dureza y la humedad.
La dureza del suelo se determina haciendo penetrar en él me-didores de dureza de uno u otro tipo y se evalúa por la curva de
profundización del pistón del aparato en función del valor de la
tiva, excediendo los cuales es prácticamente imposible e1 trabajo.En el desarrollo de las deformaciones del suelo influyen no
fundidad de la rodada que prodLrcen al pasar las ruedas y orugasdisminuye en cierto grado al aumentar la velocidad de la marcha,si el aumento de velócidad no se acompaña por el surgimiento de
§ 2. Propieclades fisicomecánicas del neumático
Bajo la acción de cargas externas el neumático suf re diversasdeformaciones que se hallan relacionadas entre sí. Pa¡a [acilitarel examen de lás deformaciones analizaremos cada una de ellaspor separado. Pueden ser destacadas cuatro ti.pos de deformacio-nes dej neumático: radial (norn"Lal), circttlar (tangenciaL), trans-t,ersal (Lateral)'7 ar;gular.
I
43

Fig' l0 De[ormación del neumático bajo Ia acción de la carga normar.
^ G,¡tn: j (18)
se denomina coef iciente, nrcdio (recrucido) de rigidez der neuma-lico en dirección normal.
44
que,crece la ca.rga, la deformación aumenta cada vez más renta.me!.te. y,.por ello, se puede habrar sobré un a"t.imirrlá"irto, ¿ercoeficiente l,n únicamente ar trataise'J. ,nu gama de variaciónde la ca_rga G, relatir.amente pequcña. -
La flexibilidad der n.roi¿ti.o., sentido circurar es consi-derablemente menor que en er radiar.-ar;-¿.f";;;;i"";, circu-
Desde el pLrnto de viIida.d del vehículo granla flexibtlidad. det neución LateraL si a una ru
del neumático y el cambde su contacto con el cadel neumático no sólo sezona de contacto, sino tasus límites. Todo esto ollamado dcsitío lateral del neumático. lo fie.. il... Esq-uema de laque.se expresa por el hecho de oue ; oesvracron lateral delrueda se d"*i, áá' rr'¿ii....i¿, "irrrilr'í neumático.
comienza a moverse bajo cie ; ;;É;;i respecto a ella, comoestá representado en ,ra'fig. I .;;i;';ru".rl'"uyy)'Ér "a,r'i'Íio o ..denomina dnguto de desuííht ;i.'L;"ru acron
I
I
(
(
(
(
(
(
(
tIIIa
ho"t: * (1 e)es llama da coef iciente de resistencta al desaío lateral y se mideen kgf/grad.
La estructurasión del aire oueen la resistenóia
y las medidas del neumático, así como la pre-se utiliza en é1. eiercen una iírf lu.n.lr'principalde los neumáticos ar ¿ewio i;i;;;ii.i !rmento
45

se incrementa hasta convertirse en el de'rrape, cuando la fuerza lateral de adhe-rencia entre el neumático y el camino seutiliza completamente.
La fig. l2 muestra Ia deformación an-gular del neumático que surge cuando a
la rueda cargada con la luerza normalse le aplica el momento M, paralelo a lasuperf icie del camino. La def ormaciónangular se manif iesta en que la líneacentral de la banda de rodamiento a - a
se desvía a cierto ángulo rp de la líneacentral b - b de la superficie de contactodel neumático con el camino. La relacióndel momento M al ángulo Q caracterizala rigídez angular del neumdtico. A con-
del aire en el neumático, disminuye el radio estático de la rueda.Se llama radio dinámico (de ftLerza\ r, de la rtteda eru rnarcha
la distancia del eje de [a rueda hasta la resultante de las reaccio-nes longitudinales del suelo que actúan sobre la rueda. Cuandola rueda gira por un camino duro a pequeña velocidad, casi sindejar rodada, el radio dinámico es aproximadamente igual alestático; en el caso general, al marchar por una calzada defor-mable, el radio dinámico es mayor que Ia distancia desde el eje dela rueda hasta la superficie no deformada y menor que Ia distan-cia desde el eje de la rueda hasta el fondo de la rodada.
de gran tamaño, cuya misióu es asegurar una buena adherenciaentre los neumáticos y el camino en dirección longítudinal y trans-versal y la aLrtolimpieza del perfil al marchar por terrenoi defor-mables, barro y nieve.
§ 3. Trabajo de la rueda conducida
Son posibles los casos siguientes de rodadura de las ruedascon ducida s:
rodadura de las ruedas de llantas rígidas por Llna sLrperficieno deformable; como ejemplo puede servir la rodadura
'de los
rodillos metálicos de apoyo sobre la vía de rodadura de la oruga;rodadura de las ruedas de llantas rígidas por una superfñie
deformable; en cierto grado a ello se aproxima Ia rodadura deneumáticos de alta presión por terreno blando;
rodadura de ruedas deformables por üna superficie dura; éstase reiiere a la marcha de ruedas con neumáticos por caminospavimentados;
rodadura de ruedas deformables por superficies deformables;son las condiciones más típicas para tractores con ruedas neu-mát icas.
Examinaremos la marcha de t¿na rueda conducida metálicapor terreno deformable. Para simplificar, supongamos que la ro-tación de la rueda es uniforme y que la marcha [ranscLrrie por Lrnsector horizontal.
La rueda conducida (iig. l3) gira bajo [a acción de la fuerzaF¿, aplicad a a la ¡ueda desde el bastidor del vehículo, que im-
WFie. 12. Deformación an
gular del neumático.
secuencia de la flexibilidad angular del neumático, la rueda puede,en ciertos límites, desviarse de la dlrección de su marcha sin unaparente resbalamiento de los elementos del protector por el
cámino. No obstante, al elevarse en lo sucesivo el momento rU,
comienza el resbalamiento del neumático y el ángulo rp aurnentaprogresivamente.-
En vista de las diferentes defo¡maciones a las que se exponeel neumático, su radio no tiene un valor determinado único, delque se puede hablar al tratar una rueda tígida. Se distinguen lossisuienies radios de la rueda con neumático: libre 16, estcLtico r""1,
dinámico lde iuerza) r,, y radto de rodadura (cinentdtico) r.
Se llama libre al radio exterior de la rueda sin carga. Aunquepuede variar en cierto grado en función de [a presión del aireén el neumático, pero para propósitos prácticos es posible conside-rarlo magnitLtd constante.
Se denomina radio estdtico r..¡ la distancia desde el eje de larueda inmóuil, cargada con una iuerza normal, hasta la superficiede su apoyo. En este_ caso debe_ ser puntualizado el valor cle lacarga que acciona sobre la rueda, la presión del aire en ei neu-mático y la naturaleza de 1a superficie de apoyo de la rueda; gc'neralrnente, e1 radio estático de la rueda se mide sob¡e una super'ficie dura. Al aumentar la carga nornlal 1'disnrinLrir la presión
'to47

Bajo la acción de las fuerzas incricadas, ra rueda en movi-miento penetra en el suelo y crea en él la rodada. Comó resul-tado' surgen las reacciones normales y tangenciales del terreno.
Las primeras están dirigidas porla normal a la superficle de' lallanta, o sea, por los radios. Ellasproducen la resultante (¿, apli-cada en cierto punto .4 del aicode contacto de la rueda con elsuelo y_que pasa por el eje de larueda O. Las reacciones
-tangen-
ciales son las fuerzas de frota-miento entre la llanta de la
del, par de fuerzas Fu y ii',s.istencia a la rodadurá de ládonde se desprende que:
r.ad.io dinámico de la ruecla. De acuerdodistancia desde el e¡e ae f a' *.¿r'frl'rT"ella
rotación uniforme de la rLleda, el momentooeDe ser igual al momento de re-fuedz fi'|¡¡, es decir, Far¿ _ M¡¿, d,e
, -Mto, o -;;-
fuerza convencional de resistencia aLa relación
la rodadura dedel coeficientefa por la cargatranslormemos
lv,,;; tt la
,13 frgd,r, que puede ser. expresada por el productode resistencia a la rodadurá aá lá-rIuá, conducidavertical G.a aplicada a la iueáá.^iráitl.r¿" de esto,la ecuación precedente en la sigui'.ni. io.*r,Fo : foGo.
rueda y el suelo. Estas tienden ahacer girar la rueda en sentidohorario. Sustittryamos las fuerzas
P,. :.j1,,TÍ:.:1_ q:_ra -asgsurar la ma¡cha uniforme de la;ii *i,.," I I :. ll:
" f:: ^, L: I 1jt ; f,;. i;.;i.;r:.,,",1''JiJl?o:., :?
ioli. i* : "iil ^
r,Sli 1, §,¡, n ;l Ii li, ü;; í ;' i:"i,,1,,'I o?',.:,'i:, : :i
fl,, :, :", X, : i, i;,r," :l -*::i*" ^qi iiiil1 .
rft ,i iT,,l,".. ü: i,.',,.T.á :H:."Y .:'
" i : : ;: l,: * :, 0_L; *.' i,;' ;:,1;'á ;
". ;i' i::, ::¿i: :::',..:
Fig.13. Esquema de fuerzas oueactúan en [a rueda conducida ionIlanta rígida durante la marcháestable por una superficie horizon-
tal delormable.
hacia arriba, y la horizontalmovimiento de la nreda.
4B
tangenciales de frotamiento porla fuerza resultante I-, .r.,,.i..-la fuerza resultante Ir, y supbn-gamos qlle está aplicada eñ elgamos qlle está aplicada en el
:iJ"" fl" :f fÍ:' .*' ?: i gl::l:i i .' i' t * ü r. "j. "i",j.,iii'J5i'
i l'l"iiliJ""1,,, :."r : f jÍ, .,1.- I : ^"..,.^,-.¡ I
; ;;; ;;i ;' " ;" I; ff ;.a,X,i,",,1", li, i", i,fuerz a de impulsión requerida.¡1r¡Pur)tult I cquerlCla.De la ecuación obteíiáii.n.rno. también que
,Fa/¿:Zi
!: f""i,O,:r:t\tli,,1i:-et coeficíente de resistencia a ta rodadurai: lk ;f !; ; l:1 : : :12, :* ! ; : I : f í i ff á"a' i' i| ¡1 ¡ !, áZ í :" f,:,' i:21: "' T li l:'
o : .:": : 1' j : - 4 a i 4-, *; ; ;"; ; ; ; ; ; " ;, {i;i,; : n' f,' : ; : í:i" 2,!i,"i! f" ;y : :? ! : 11
r g á .e
t e g i a o, i i i iií ", ;;;i; ; ;;;," í,,','#í,XZpreestablecidas en un iector ñoriJoijil.Para ciertos varores ¿e ra iücá"iii' xo puede originarse er res-li,..tg de,la rueda, mayor o menor, dependienclo de sr" ..,.-I lJl *:.1 ?"
o;, l,l ::* :, g,: i: ; : ü.,ii"i",rt[ Hi,i ilo*j, á I. l,?,,iii.
f :: i: Í,:x o,',
:,0 1::".i' i : I .: :, :' : {-iñii., í1i#á;' i; [', j.'i :,0 ',f;
: :: l.j i Í", .p-i:1. q l.:' I a ¡u ed a e; ; úp;;l;;' ;'r; i;;; ; á:';:i"L"il
: ::,0; r'i. #"',f i : " -:L : 1* i¡ 9 ifu ,l',"',i, c o,' . iÉ.iio'',f '. i :,: f,ff§ i;l: ",r.11.,T1:Lr,
I a r ue d a d ;ir - "d
"' sj r;." I "¿:;i". ;? r., ;ril,".+:ij:«derrap an do>>.
((
(
(
((
(
((tIeeaa(,,a
rj
a a^.. et^U J¿tr JtJ
49

siendo D y b: diámetro exterior y la anchura de la llanta dela rueda, correspondientemente, cm;
coeficiente de compresión volumétrica del suelo,kg[/cm3;
G¿: carga verticaI transmitida por la rueda, kgf.De la fórmula dada se ve que en el valor del coeficiente de
resistencia a la rodadura de una rueda rígida por suelo deior-mable influyen las condiciones del te-rreno, el valor de la carga vertlcal queacciona sobre la rueda y las medidasde la rueda, especialmente el diámetrode la llanta: mientras mayor es el diá-metro menor es el coeficiente de resis.tencia a la rodadura.
Analicemos el segundo caso caracte-rístico, cuando el neumcitico elásticorueda uniformemente por L¿na superfí'cie horízontal índeformable (figttra 14).De modo análogo a lo anterior, su-pondremos que la rueda está cargadacon una fuerza vertical G¿ ! se mueveuniformemente por un tramo horizontalimpulsada por la fuerza Fa. La direc-ción del movimiento está indicada conla flecha /.
Durante la rodadura de 1a rueda loselementos delanteros del neumático
L-K-
Fig. 14. Esquema de fuerzasque actúan en la rueda con-ducida con neumático du-rante la marcha estable poruna superficie horizontal no
de[ormable.
pecto siguiente:
fo:o'86d#'normales son mayores que en la trasera. TaI carácter del dia-grama lleva a qLre durante la rodadura de un neumático elásticopor una superficie no deformable, la resultante Y¿ de las reac-
IVI¡¿: Y¡a¡ - Q¡s¡.
que se delorman, la rigidez de la cubierta y la presión del aireen el neumático. Al aumenta¡ 1a masa expuesta a deformaciones,aumenta el gasto de energía para el f ¡'otamiento interior del
Anal er caso característico de trabajo de ta rueda,cuando elastico se mueae urtiformemente por unasuperf[c deformable. En el caso dado tiene lugartanto la del terreno como la del neumático. Et cón-sumo de potencia para la deformación del terreno juega un papelmucho. más importante, en el balance total de pérdiáas paia'el¡odamiento de la rueda, que el gasto de potencia para lá defor-mación clel neumático. Por ello, én las coñdiciones'analizadas lafuente prirrcipal de disminución de la resistencia a la rodadura esla reducción de la deformación del terreno, o sea, la reducciónde la profundidad de la rodada creada por las ruedas en movi-miento. Esto puede ser logrado elevando el área de contacto delneumático con la superficie de apoyo, para lo que es necesarioreducir correspondientemente Ia pre§ión-del aire én el neumático.Aunque al dlsminuirse la presión del aire aumentan las pérdidas
que entran en contacto c cargan y se deformany los elementos traseros, contacto, se descarga-ny restablecen su forma. estuviera dotado de
ina elasticidad ideal, en utilizada para la de-
tica, a causa del frotamiento dentro del neumático y por el área
50 8r 51

en el neumático, sin embargo, las pérdidas totales para la roda'dura de 1a rueda serán en este caso menores. Las consideracionesindicadas son algunos de los motivos por los que en los tractoresse usan neumáticos de baja presión.
De lo expuesto se desprende que la magnitud de la presióndel aire en los neumáticos ejerce ciiferente inIluencia en la re'sistencia a la rodadura, en función de las condiciones del caminoo terreno. Para que en todas las cor'diciones de la marcha laspérdidas totales para 1a deiormacién del terreno y la deformacióndel neumático sean minimas, sería conveniente valerse de presiónaaríable del aire en los neumáticos. En los automóviles de granfacultad de tránsito se montan dispositivos para regular la pre-sión del aire en los neumáticos durante la marcha, adaptándosea las condiciones del camino.
Se debe señalar que, al elegir la presión del aire en el neu'mático, se deben tener en cuenta no sólo los factores de resisten'cia a la rodadura, sino también una serie de otros factores. Poreiemplo, 1a elevación de la presión del aire puede ser limitadacón el propósito de conservar las propiedades elásticas de losneumáticos; en los neumáticos de las ruedas de dirección de lostractores se utiliza una presión del aire un tanto mayor que lade las ruedas motrices, para hacerlas más resistentes al desvíolateral. En una serie de casos, la reducción de la presión del airese limita por 1a magnitud permitida de la deformación normaldel neumático, ya que la relaclón entre Ia deformación indicaday la altura del perfil del neumático (la defor¡nacion relativa delneumático), determina el plazo de servicio del neumático. Cuantomenor es la presión del aire empleada, tanto mayores son, conlas demás condiciones iguales, las deformaciones radiales delneumático y tanto menor la capacidad de carga correspondienteadmitida para la misma. En algunos casos, la reducción de Iapresión se limita a causa de la posibilidad de que el-¡eumático!ire en la llanta al transmitir elevados esfuerzos periféricos.
§ 4. Trabajo de la rueda motriz
En la fig. 15 está representado el esquema de las fuerzas ymomentos qLre actúan sobre una rueda t¡otriz con neumático, almoveise uniformemente por una superficie horizontal deformable.Para simplificar, adoptaremos que el neLrmático no tiene grandesestrías y su banda de rodadura es lisa.
La rodadura de la rueda se provoca por el momento de im'pulsión.d4¡.n aplicado a su eje. Además del momento de impul'sión, sobre la rueda actúan las siguientes iuerzas y reacclones:el peso Gr, incluyendo el peso de la propia ¡uedai la _fuerza dereacción F., que es Ia resistencia que ejerce el bastidor del vehícu'lo a la impulsión de Ia rueda; las reacciones del terreno que
52
elgdgT s.er.representadas como dos resultantes: la vertical y,dirigida. ha_cia arriba, y t?.horizoniál x;-;iJ¿;á; á" '.lriiia" o.lamá¡cha.Laresistenciadelairesedespiecia..._.
A consec ción ¿'et i.iieno y las deforma-ciones ¡adia o .o ^.^.r,,^:;-;,.'-^:i "Y'miento de ra i,,??,ol!ft!:lej""¿"j: il.r,I:con relaciór gierta distan.ii fo,igiLáinut o..EI momento mo-mento lvl¡, de resistencia a la rodadu-ra de la rueda. La reacción deempuje clel terreno X. tiene igual va-lor numérico que la resisteñcia delbastidor del vehículo F., pero está di-rigida en sentido contraiio. Ella ac-ciona respecto al centro de la ruedaen un brazo, que es el radio diná-mtco r, de la rueda motriz. En el es-quema, la fuerza X. está dispuestaconvencionalmente en el fondo de la
Xrt)t - Xrrra¡,de donde 'ut: rr4.¡r.
roda da.Escribamos el balance de poten-
cias desarrolladas por las fueizas ymomentos que actúan sobre la ruedámotriz. En el caso que examinamosde mar.cha estable, él balance de potencias se expresa con lasiguiente ecuación:
1trf¡spto¡ : I4¡r{0r I Xrr r,0,r,
angular de rotación de la rueda.viera sin resbalamiento y el neumático nctangenciales el balance-de potencias indi-rse de la siguiente manera:
M¡*por:M¡rarlXrarsiendo ut : velocidad teórica de avance cle la rueda.. De, Ia compara-ción de las dos expresiones dadas cler barancede potenclas resulta
. P.or.otra parte, la velocidad teórica de avance de ra rueda esigual al .prodrrcto de la velocidad angular or por el radio teóricode rodadura. De esta manera, es polibre cónliderar coÁo radioteórico el radio dinamico de la ruedá motriz rr.
El valor real de la velocidad de avance u de Ia rueda motriz,a caLlsa de resbalamientos, siempre es menor que Ia teórica u¿, yel radio real de rodadura r es ñ enor quc el t'éórico ,.. b-ntr. etradio de rodadura r y la velocidad de ávance de la rúeda existela siguiente dependencia:
A : fet.
63

xror,:7;F.Para Ia marcha estable
,, If ¡*o - if¡¡A': ---l- '
por consiguiente
nellmático con el terreno, se comprimen baio la acción del mo-mento.de impLrlsión y como resultado, se réduce por una vueltael camino recorrido por la rueda.
De lo expuesto.sobre la esencia física de los procesos de adhe-rencia y resbalamientó se deduce que, con las iondiciones dadas
7-1
ItI
It
I
tI
,tl,.o-t\l¡, o _rlr
- M. fr)rfr' "tmp
M¡*o - If¡¡IIi,np
t)
ut
La relación "',"'fr=1"' puede ser considerada como el rendi'
miento que tiene .n''ti.ntu las pérdidus por la rodadura d'e la
ruedct, y ia relación fr como el rendimiento que tiene en cuenta
Las pérdiclas por et )esbatamiento de la rueda' Designando el
nrimero con nrr, V.f ..gr"do con lo, rePreSentar.em,os el rendi-
Hi.rilit"üi ¿',j'ir"u.¿a ñrotriz rr en ia forma siguiente:
t1r:I¡rl)ó' (20)
(2 1)
(2la)
El rtalor del resbalamíento de la rueda mo
oor-la rálación de la velocidad de movimientoá-iu uutot teórico posible y generalmente se ex
li.,ito.--ó..lgnunoó el vaioi del resbalamientescribir que
ó_a#.100%
Deoendiendo del valor de la diferencia ur- o, el valor del res'
brl;;i;i;^lr.¿. ur.iar en los límites desde cero' cuando ? : ut'
;;;ü"i0ó%i -.rur¿o
u : 0, o sea, cuando la rr-reda patina sin
tener movimiento de avance'"''^Enü;' .i"r:áior del resbalamiento ó .y .l rendimiento, Ylo,. Qu.e
tiene en cuenta las pérdidas por resbalanriento, erisle la slgul-
ente relación:
ó:l-t:,-ru.Una evaluación por separado de las pérdidas. por rodadura
" nJr'i.Julamiento'.., .n'.i.tta medida, ionvencional. En reali-
ár"d,'.;;;-i;-'dñ;.rtran datos experirnentales, ai crecer el res-
54 65

ruedas motrices'iales de tracción, en el valor
Además de las fuerzas tangenctales de Itacclulr' trrt trr
del resbalamiento d; l's rueias nlotricg.,llil'y: ":,1"J.?i-gl.f ' ,".rü'uf u;i.;f; ¿e las ruelas motrices iniluye el peso que
actúa en éstas, va q" ¿;ü ;;;;t;; i;s ruedas a ll.t:'.?il:tlt.,oll:;ll'1, ;",' ü'J ?r' á.i." ¿. 1; 'á áÉ;;;; :l: :lll : 1:: :: :n*':? J" :l3 iii il'oá' "Ju ll Ji'p á'i: Iei ^
i ; i'; li I ;' ti!: : ^' ^ :,,:",1'" ? -T:.ti§ ::
::'i"J"#1"'u'i', iá'd;' ;i i ;; ;.iia det vehículo, que des i gn a remos
ootaÍf;'., fin de reIlejarvalor del resbalamientoY Ga¿, representaremos elD
+. Denominemos esta relación coef iciente de aproaechamientoUad . . -- ^ -r ^ ^^- -^ F'l ^nof iniontp rn-
la iniluencia corijunta que ej-ercen en^el
de las ruedas motrices las Iuerzas 1,ir¡rf.*iüto en lunción de la relación
iát orro de adherencia, y designémo.slo co.n q'' El' coef iciente q'
t!' ¿1".í, iniluá ru riáüi..' o.p éñái.¡ do de I as' con d icion.r^ dt.t:i;[í'¿t"rñrániluá vuriu¡i...'O.p.ñaiendo de las condiciones de tra-r-^i¡ ol ^nof inient.
'"'uá1"-uáriu, desde cero, con P1g: 0' hasta['riü. .l'.?.il.i."t. puede váriar desde cero' con .P¡* - u' rlzSIi:r
I "'^r^' -ávimn '
t""; no'*ttftutse Por completó el peso deái'"árói *a*imo q..r* ul aprovecharse por
asentamiento del suelo, dadaantes en la fig. 8 y reflejala variación de las propieda-des mecánicas del suelo alaumentar su deformación.
En caminos con pavimen-tos rígidos secos eI procesode resbalamiento de las rue-das motrices transcurre deotro modo. Mientras la fuer-za tangencial de tracción P¡,es menor que la iuerza defrotamiento entre las ruedasy el camino, el resbalamientoes insignificante; éste seorigina como resultado delas deformaciones tangencia-les de los neumáticos y unresbalamiento parcial dá al-gunos elementos del neumá-tico en la zona de su con-
l- vvt
(GOSTcampogu ien te.númerotiempoQ0 las
Fig. I6. Curvas de resbalamiento deltractor de ruedas con neumáiicos ó:: f(Ps"o) en dilerentes suelos:,-en una rastroJera; 2-en un camDo DreDa-
rado para la slembra.
l- -L . De acuerdo con el Estándar del Estado
tacto con el camino. Alaumentar en lo sucesivo Isión transmitido,comienza un resbalamien tor por el caminoy, en o-casiones, es suficie ivamente pequeñade la fuerza P1, para Qu in movimiento deavance.
Se ha elaborado una serie de fórmulas empíricas para la de-terminación analítica de la curva de resbalamiento. ño obstante,todas estas fórmulas pueden tener una utilización limítada y son
É('
I((r(r
adecuadas únicamente para cálculos aproximados.Para hallar Ia masr itud del resbalamientoP,ara hallar Ia magr: itud del res'balamienlo por aía experi-
mental se deben medir durante los ensayos los radios de rodadurareales de las ruedas motrices r y los iadios teó¡icos ,., yu qr"
(,(r(<('((a
a
aa'a]rlatll
.7057-54) vigente para los métodos de ensayo en elde tractores agrícolas, esto se realiza de la rnánerr ri-Se determina el radio real de rodadura midiendo elde revoluciones /,¿trab de las ruedas motrices durante el
en que recorre un tranlo medido de longítud S, trabajanrlocondiciones correspondiente¡ del terreño y con la óargl
l)l

prefijada en el gancho.según la relación:
de donde
El radio de rodadura buscado se calcula
S - )n¡nrr^t,
sZfl,ll.¡uto
marcha.Partiendo de estas suposiciones, el valor del radio teórico bus-
cado se determina midiendo el número de revo'lucie¡1s5 nuo. de
las ruedas motrices durante el tiempo que éstas recorren en un
séctor experimental un tramo medido dé longitr,rd S, marchandoel tractor en vacío. De esta manera
S:2flrrnu^",de donde
Ya que, trabajando el tractor con carga' a causa del ,resbalo-miento'las ruedás motrices recorren por vuelta una distanciamenor que marchando en vacío, entonces
lltrab ) ívac.
Una vez determinados de este modo los valores de r v rr,
hallamos la magnitud buscada deI resbalamiento, por la [órmLrla:
s't - 2flnu^"'
A: I - L :l
- flunc
- fl¡ab- flvac'
1009ó.f r fltrab fltrab
(22)
58
tanto mayores que en los terrenos blandos, los errores que aca-rrea esto se superan por la liquidación del resbalamiento de lasruedas motrices. De esta manera el valor del radio teórico seobtiene, a fin de cuentas, más próximo a la realidad que al deter-minarlo por el método establecido por el GOST.
EI resbalamiento de las ruedas motrices ejerce una influencianegativa en los índices agrotécnicos y técnico-económicos de lostractores y automóviles. Por consiguiente, el mejoram,iento de lascualidades de adherencia de las ruedas motrices es uno de losproblemas más importantes. En condiciones normales de explo-tación, el valor del resbalamiento de las ruedas no debe excederlos límites permitidos. El problema acerca del valor del resba-lamiento permisible debe resolverse teniendo en cuenta las pro-piedades del camino o del suelo, del carácter de la operacióntecnológica que se realiza y de las particularidades de la estruc-tura del equipo. Dependiendo de los factores expuestos, la magni-tud permlsible de resbalamiento puede tener en algunos casosdiversos valores. Algunos experimentadores, basándose en losresultados de los ensayos de tractores de ruedas, consideran quelos límites permisibles de resbalamiento de las ruedas motricesen suelos compactos es del 15-18 9/0, y en suelos f riables,25-30olo.
§ 5. Determinación de las reacciones normalesdel camino en las ruedas detanteras y traserasde tractores y automóviles
Las reacciones normales del camino en las ruedas de tractoresy automóviles pueden tener diferentes valores, dependiendo éstosde las fuerzas y momentos externos que actúan sobre el vehículodurante el trabajo. El valor de estas reaccion,es ejerce una in-fluencia considerable en las cualidades de tracción y frenado delvehículo, su estabilidad longitudinal y dirigibilidad, así comotambién en las cargas que perciben sus conjuntos y piezas.
Analicemos un caso general posible, cuando el tractor con unremolque avanza aceleradamente para vencer una rampa bajoun ángulo a (figura 17). El tractor es de tipo 4\2 con ruedastraseras motrices y delanteras conducidas. Para simplificar eldibujo, las ruedas de los tractores están representadas por suscircunferencias teóricas, con los radios r. las ruedas motrices,y radios r¿ las ruedas conducidas.
Durante la marcha rectilínea del tractor, sobre éste en elplano longitudina I actúan las sigr-rientes f uerzas y reaccionesextern a s.
l. Peso del tractor G; está aplicado en el centro de gravedaddel tractor; la posición del centro de gravedad está fijada en elesquema con dos coordenadas: longitudinal o y vertical /¿; laprimera determina la distancia desde el centro de gravedad hasta
59

la recta trazada por el eje geométrico de las ruedas motrices per'
i.,iii.rfár*ente'a tr-suó.r?i.ie del camino; Ia segunda establece
ir'^diü;¿ir-áái¿. J ..^ntro de gravedad hasta [a superficie de
aDovo de las ruedas."'"d." ñ.irli¡¿i-iái*ot d.el camino: Y" en las ruedas motrices'n Y. está desPlazada a la distan';tantia a¿ de las rectas trazadastivas, Por la PerPendicular a sus
lelas a La suPerficte deL camino"
La fuerza de impulsión X, que actúa en ciirección de 'la marcha'
Fig. 17. Fuerzas externas que actúan en el tractor ,en el plano longitudinalcaso general de movimiento'
eje geométrico de las ruedas,a .n
-dit.cción oPuesta a la di-
una distancia r¿ del eje geo-
,n, aPlicada a1 Punto del remol-
oue que se halla a la altura lx*r" dé la suoeriicie del camino; en- el
:;;"*:;;;ii;;'i'ün.i^ ¿'-i"cción cstá dirigida bajo un án'
urlcr ,J-". a esta suDerficie, nto de'-'á.'Ftitrra de iiercia total P¡ de las masas en movtmle
uuñ.. -'á.i
tiu.to; -á;.--;; oiigin, a velocidad irregular de
ma rcha."'" r]o'.1 plano longitudinal. 1 las fuerzas tangen-
.irü= i; i;;;.i, de'ias rueda as en rotación de la
trá"-t.ii,O", montadas en los ersales' Los momen'
tos crearlos por las-fuerias tang nercia indicadas' así
60
como también la resistencia del aire se desprecian en vista de suinlluencia relativamente pequeña en ra dináhi;;i;üi áL"t-ira.tor.Para. simpli[icar en [o iucesivo ros cárcuiü,-irlriJ.ro, t.fuerza de la resistencia de tracción p*",, en tr'¿lr...iáñ' d. ,,actuación hasta la intersección con el ptáno que p;;;-;;; ei eiede las ruedas motrices y que es noima[ ,^ ir'irp.'rirci. dercamino. El nuevo punto de áplicación de la resistenóii-áe trac-clon lo ctenomrnaremos punto conuencional de remolque. su al-tura sobre la superficie del camino ftgon se determina'de la rela-clon:
h'srr: hu^n * /*un tg Yuun,
siendo lgan: distancia longitudinal desde el punto real de remol-qLre hasta el eje de las ruedas mótrices.
Acordemos considerar el ángulo ygan positivo, cuando Ia líneade la resistencia de tracción esIá inciinaáa haciá abajo en direc-ción a la superficie de apoyo, y negativo, cuando la misma estéinclinada hacia arriba. En el esquema analizado se adopta elprimer caso.
Para determinar la ¡eacción normal del camino y¿, que actúasobre las ¡uedas delanteras, confeccionamos la e.rñi¿n de 1ospares rl^e todas las fuerzas dadas en la f igur a 17 en relación alpunto.O2, _en el cual la fuerza de impulsión X, se cruza con [ano.rmal a. la. superficie del camino trazada a tiavés del eie geo-métrico de las ruedas motrices. La ecuación de los moineñtostiene el aspecto siguiente:
Y o(L + ao)*Y,a,-[- Gsenoá I P ¡h*p*.ncosysun¿;un - Gcossa:0,
siendo l: batalla del tractor.
dadura A,I¡, y M¡o de las ruedas motrices y conducidas. En ade-lante, teniendo en cuenta que lt¡, I M¡¿ es el momento de re_sistencia a la rodadura de todo el tractor, ar que.designaremoscon M-¡, _obtendremos Ia sigLriente fórmula paia deterñinar lareacción Í¿:
I¿a¿ porSustituyamos en la.ecuación expuesta. los productos yra, y,r Dof 1oS corresoon dientes momenin* 11a req'iqlannio , I "
'"^,correspondientes momentos de reslstencia a lá ro-
n, _ O cosoa - (G seno * pr) h - p.unl/*rn_ lI,-q- (23)
es-qLrcdel
la
6t
(
(
((r(r(r
lrl,ilrf'a,Il,l

(23a)
tomar con signo menos.Durante Ta marcha estable del tractor con remolque en Ltn
tramo horizontal Y¿ e Y¡ tienen los siguientes valores:
,, Go- Pn^nh:c^n- Mft n: -----'--- '
yr: WPsunh's^n+ Mf +pgan seÍr y*un.
rcacción /¿ por su valor de la ecuación (23),
siguiente [órmula:
Y¡: G cos o 1t * a) * (O se¡a * P ¡) h * P*^nh'run* Mt
f d".t
Í.".t
obten dremos 1a
* Pgrn sen Ysan.
(23b)
(24)--G+; I:6 L=ro . )
62
Y d+ Y r: G cos 0 * Pgun sen ysan.
Al calcular Ias reacciones normales Y¿ e Y, para automóvileses necesario tener también en cuenta entre las fuerzas externasque actúan, la fuerza de resistencia del aire P., aplicada alcentro vélico que se halla a una altura h, de la superficie delcamino. Por esta razón, al emplear las fórmulas (23) para hallarlas reacciones Ya e Y. en los automóviles, es necesario completarel segundo miembro de las fórmulas con el momento P,h.; en lafórmula para Y¿ éste debe entrar con signo menos y en la fór-mula para Y", con signo más, ya que con este momento las ruedasdelanteras se descargan y las traseras se cargan.
Para una representación más evidente de la distribución delas reacciones normales entre las ruedas cielanteras y traseras endiferentes condiciones de movimiento, y para tener la posibilidadde comparar en este sentido diferentes vehículos, se introducenlos Índices específicos de los valores Y¿ e Y¡. Denominemos la
rel ación
relación
+ coeficiente de carga de las
+ coeliciente de carga de las
ruedas delanteras y la
ruedas traseras y de-
(25)
signemos estas relaciones con l,a y I., correspondientemente, Losvalores Ia y l,' pueden ser determinados por las fórmulas dadasmás arriba para el cálculo de las reacciones I¿ e Y¡. En parti-cular, dnrante el movimiento estable de un tractor con remolqueen un tramo horizontal los coeficientes Ia y ),, tienen los valoressiguientes:
a1.__tuo- L
PsunhL^n + lvl¡
GL
P h'_ + ltlr_1. _'gan"gaat'.'1 .
"qest G L t
L- a1 -_
_I.'Í- L t
^ a, lI¡)- P.h-¡"¿: T - ---- GT-: r'ldest
n L-o , M¡*Prh. 1nr: --f- -r GL : Á.est
GL
(
l
(25a)
09
lrur(h!*^n* t."nnfr.n) + M,
:fr"rtt P *^n(h'*^n *GL
L."n Y*'n) * M¡
En estas f órtnulas fd".r: f y f ,"., : +, es decir, los va-
lores de los coeficíentes de carga de las ruedas delanteras ytraseras para la posición estática del vehículo.
Si la línea de la resistencia de tracción en el gancho es pa-ralela a la superficie del camino (ygno:0), entonces l.a * 1,.:1.Si ygao * 0, entonces, estando inclinada la línea de la resistenciade tracción hasia abajo 2,¿ * I, ) l, y hacia arriba X¿ * [" ( l.
En automóviles sin remolque que marchan uniformemente porun camino horizontal,

recae sobre las ruedas trase¡as empeora las cualidades de ad'herencia del tractor; 1a reducción dei peso que se transmite a laruedas delanteras se refleja negativamente en su dirigibilidad yestabilidad longitudinal. En los-chasis automotrices a las ruedasdelanteras se t-ransmite una parte considerablemente menor delpeso (Ya.., xO,2 G), ya que ie tiene en cuenta que al disponer
en el bastidor de1 chasis máquinas suspendidas, el centro de
gravedad del grupo se despla-zá¡á hacia adelante. En los coches
áe turismo, como lambién en los camiones, no habiendo carga en
lá plataforma, eI centro de gravedad se dispone aproximadamenteen'el centro de la batalla. Á1 haber una carga correspondiente a
la capacidad de carga nominal, estando ésta uniiormemente dis-tribuida en la platafórma, en las ruedas-traseras recae en posición
estática aproxihradamente (0,7 . 0,75) G.
Los párámetros de la estructura del vehículo también ejerceninfluencia en la redístribución de las cargas normales entre lasruedas delanteras y traseras. cuanto más corta es la batalla delvehículo, y cuanto más alto está dispuesto st-t centro de gravedadv el puntó convencional de remolque, si las condiciones externasiestailtes son iguales, tanto más bruscamente transcur¡e la re-distribución.
En /os autotttóuiles de tres eies la redistribución de las cargasnormales entre las ruedas depende, además de otros factores, del
sistema de suspensión de los puentes motrices intermedio y trq-sero en el bastidor del automóvil. con una suspensión común de
los puent,es citados en un carro balancín con bielas reactivas,el altomóvil de tres ejes puede ser considerado como de dos
eies, cuya baialta es igual a 1a dis+'ancia entre el eje -de las
,ü.du, áelanteras y el eje de rodadura del carro trasero. En este
caso, ei método expuesto para daterminar las reacciones normalesdel camino en 1as-ruedas- de un automóvil de dos ejes, puede ser
utilizado para establecer las reacciones normales del camino en
las ruedai delanteras y en las ruedas del carro trasero de ut-t
automóvil de tres ejes. una vez determinado el valor sumario de
la reacción normai- en el carro, es posil;le descomponerlo entrelos puentes int'ermedio y trasero, partiendo de la condición de
eqLriiibrio del carro con relación a su eje de rodadura,
04
§ 6. Determinación de las reacciones normalesdel suelo en las ruedas del tractor trabajándocon máquinas agrícolas sus rendidas
Es necesario diferenciar.dos posiciones de Ia máquina suspen-dida: de tra.nsporte y de trabalo. En .i piin,.i'.lio,-.áur. .rvehículo actúa únicañente la f.u'erztransmite a Ias ruedas del tractor.del peso de la máquina, se debereacciones del suelo que obran enlas ruedas de aoovo.
,Estando Ia 'máquina suspendida
males del suelo sobre Ias iuedasminad¿s por -las fórmulas dadas en el párrafo anterior, susti-tuyendo en ellas las coordenaddel centro de gravedad del tradenadas as¡ ! hgr del centro deentendiendo por dicho conjuntradora. Basándose en el héchoconjunto suspendido, en relaciigual a la suma de los momentopor el tractor y la máquina sgrg_po como está representadohallar los valores btiscados dede los momentos, en relación al punto 02:
G*, cos ctasr : (Ga - Gra=) cos o;Gu, sen uhg, : (Gh + G.lz.) sen o;
(26)
(((((((((((((IIl3eaoa
siendo G A, : peso _del_conjLrnto suspendido.
t"_
,gr -
ptrJv utrr LUIIJ LllrLU suspenoloo.Gs: peso.de Ia niáquina süspendicla,
y h":coordenadas lóngitudirial y vertical del centro degravedad de la máquina- suspendida, respectiva_mente.
o: ángulo de inclinación al hoiizonte de ra suoerficieen la cual se halla estacionado el srLroo.
- r ----De aquí, teniendo en cuenta que G*.: G + b., Lbt.n.n,or,
Ga-G-a-ss.ucr _ _?:F6;_ ,
as
Si la máquina suspendidadispuestas delante del eje dela fórmula para determiñar la1los por ellas deben ponerse con
o algunas de sus secciones estánlas ¡uedas motrices del tractor, encoordenad.l agr los momentos crea-srgno mas.
05
0

Al determinar las reacciones normales del suelo en las ruedas
delanteras y traserastrabajando, podemosactúan sobre los órgcon la reacción resu
las principales máquinas Paración de lá reacción R está disPvertical que Pasa Por el centro
apoyo, tendremosal centro Or:
siendo m y l,:
De aquí,
la siguiente ecuación de los momentos respecto
Rr"r/n :Y "lr,
brazos de las fuerzas R.., e Y. en relación con elcentro instantáneo de rotación de la máquinasuspendida, respectivamente.
., R."rft¡ s- |ar
(27)
Fig. 18. Esquema o,'u ,ftiu1er#irr::lril"t: l'r'rr'."r1,1T'oas
del centro de gra-
EI producto R.../?? se denomin a momento de profundizaciónde la máquina susp,endida. Un trabajo estable es posible cuando
Fig. 19. Fuerzas que actiran en la máquina suspendida en el plano longitrLdinaldurante el trabajo.
el momento de prof undización tiene valor positivo.De la fórmúa (27) se desprende que la carga en las ruedas
de apoyo de la máquina suspendida depende del valor del mo-mento de profundización, que se deterntina con la fuerza R.r.dada por la posición del centro instantáneo de rotación O. y de-pende de donde están dispuestas las ruedas de apoyo. Cuantomayor es la distancia entre las ruedas de apoyo y el centro O.,tanto menor es la influencia que puede ejercer en la carga sobrelas ruedas su desplazamiento, en los límites prácticamente po-sibles, hacia adelante o hacia atrás. Cuando el centro O. tiendeal infinito, o sea, siendo paralelos los tirantes supericr e inferiordel apero suspendido, la magnitud de la reacción Y. no está su-
0q67

peditada a la posición de las ruedas de apoyo y se determina con
la ecuación:Y. : R* tg 0
=L R, tg rll - R. (tg 0 -r- tg rp), (28)
Fis. 20. Fuerzas que actúan en el" durante cl trabajoconlunto suspendido en el plano longitudinal
estaÉle en un sector horizonta[.
tical,,hallamos que las reacciones normales y¿ e I. en lasdelanteras y traseras tienen los siguientes valo-res:
,, Go-Rrtgaa.{Y"L"-Mr-:-:.dest-
_ R.. tg 0 a, * ,&l¡ - I/.L" .
Lt
Y,: a)*R*tgo(Lfa")-f"(t{ ¿s) + ¿tf
rued a s
(2ea)
(2eb)
siendo L.: batalla de la m.áquina suspendida, distancia clel ejede las ruedas de-apoyo de la máquina hasta el ejede las ruedas motriies del tractor.Al deducir las fórmulas (2g) hemos desechado et momento(,1r., creado por la reacción R..iespecto a la superf icie de apoyo
de las ruedas del tractor, en vista'de la pequeñez del Oiuro h,,sobre la cual ésta actúa.
olicación.' Emoleando la ecuación cle lascon elprrnto. Os Y la ccuación de
68
fuerzas que actúan en relaciónsus proyécciones en el eje ver'
(((((I(Iaaaaaaaa
69

Fiq.2l'Esquema-decorreccióndelascargasenlasruedasdelconiuntosuspen.dico regulanOo tn pos,.i-ó-,i't.f-ó."ti" iristantáneo de rotación de la máquina
susPendida.
Fig.22. Esquema del corrector n'd,ii.ili?,Í3.1a carga en las ruedas del conjunto
Otro método PaIa corregir -lade apoyo del aPero susPendido,cadoé, tonsiste en la utilizaciónhidráulico del tractor. Como se
funcionamiento del vehículo, el
.iiinA.o / y, como resultado,'en los tirantes de elevación del apero
70
R...fr:Y"lr* Nl*,
siendo lN : brazo de la fuerza ly' respecto al ceniro O".De aquí
v_ (30)
Uno de los principales problemas que se ¡esuelve montandocorrectores de carga de uno u otro tipo én los tractores de ruedases el aum.ento. del peso de adherencia del tractor y, de esta ma-nera, la disminución del resbalamiento de las ruedas motrices.
este papel de los correctores de la carga, frecuen-denomina aumentadores hidráulicos delTeso d.e ad-mentadores de la cargd, adicional en'las ruedasactor.
Durante el arado los tractores marchan con las ruedas de.
normales también se acrecienta a causa de la acción de las fuer-zas que prigina el arado suspendido. En particular, con ello unoaoel imoo¡tante eierce la rreda de ¡norro-Aal qrqA¡ ñra or,.n7azas que pngrna e[ arado suspendido. En particulat, con ello unpapel. imporiante.ejerce Ia rueda_ de apoyo-del arado, que avanzapaper.lmporuanre eJerce ra rue0a de apoyo del alpor el suelo sin labrar y crea, bajo la lnfluencipof er sueto sln tabrat y crea, bajo la influencia de la reacciónvertical que actúa en ella, un momento que ca¡ga complementa-ga complementa-riamente las ruedas del surco del tractoi y desóarga lás ruedasque van por la superficie sin labrar. Estc ditúa las-ruedas motri-ces derecha e izquierda del tractor en ccndiciones desiguales deadherencia con el terreno y ejerce, de esta manera, unainf luencianegattua en sus cualidades dé tracción.
. Cuanto. más cargada está la rueda de apoyo del arado tantomás ésta influye qn la irregularidad de disfri6ucíón cle las reac-
7t

EJEJllPLOS DE CALCULO
mtteve con velocidad un'ilorme en mar'
r g'nt'hJ"poi'trna rastro¡ere.de centeno
"titttñtl'"'t 'ia-
rodaduia f : 0'08; cl
an por las fórmulas .23 b, 1ue adapta-
"ptJttnlu¿""Jé lu fot'nu iiguiente:
Itl¡* Pg^nheunfd-rd".t ---- L
M¡* Ps^nhgu^/r: Yr".t +
---f-'Primeramente determinamos por la ecua-ción- (24) el valo¡ de
""rriri'¿i'?;'",'u'rl"=,; ü;'"^'tüá"'en las ruedas delanteras
t¡actor en Posición estática:
yd..r: c +:3ooo #*: looo kgt;
v : G L; n:3ooo 31+i*#ll :2ooo kgt'' t"at - " L
Momcnto de resistencia a la rodadura del tractor
M7 x lGr¡:0'08'3000'0'735: [76'4 kgf 'm'
En la marcha en vacfo del tractor las reacciones buscadas tienenguientes valores:
v _ .11. 176,4, duu" - fd..t - ¿-: 1000 - Zp+f - 928 kgi;
v _, M' 176,4
"r"" - t/r",t * i : 2000 + -z¡¡5 : 20i2 kgf'
los si-
Al marchar el tractor con una carga en el. gancho : 1400 kgiP*unh*un 1400.0,4
Yo:Yoru" :928 - --T1¡--:700 kgl;
Yr : A - Y¿ : 3000 - 700 : 2300 kgf.
Para determinar los valores de Y¿ e Ytla gráfica en la fig. 23. Está confeccionadadadas, Ia dependencia entre Ya e Y.
con otras cargas en e'l gancho sirvepartiendo de que en las condiciones
t((f"§
t((((((
IIa
a
aaaoaaa
72,
las reaccionesy traseras del
del peso del semirremolque Gi",. y la creación en el punto de enganche de la
resistencia de tracción PDe la ecuación ¿. tá'.'.ornentos en relación con el eje O de contacto de
las ruedas del semirremolque con el camino tenemos:
Gl"u,Lr"* * II¡r", - Cr"*or", - P*oná*"n :0.
Teniendo en cuenta Que tr4f."* : I (cr",r-G1".)tr, y Pgan:, (Gr.,n-Gí"n,)después de las transtormaciones necesarias obtenemos que:
n arem+-1!1g:¡-:Q = G.^^ jr* :3000+: 1500 kgr.ui"',, : u'",n l*lllp*l=7J : u¡em 7; - ouuu T¡- - ruvv
Correspondientemente, Pga¿ - I(O..^ - Gl"^) - 0,4(3000 -,t? ñ tnt.
73
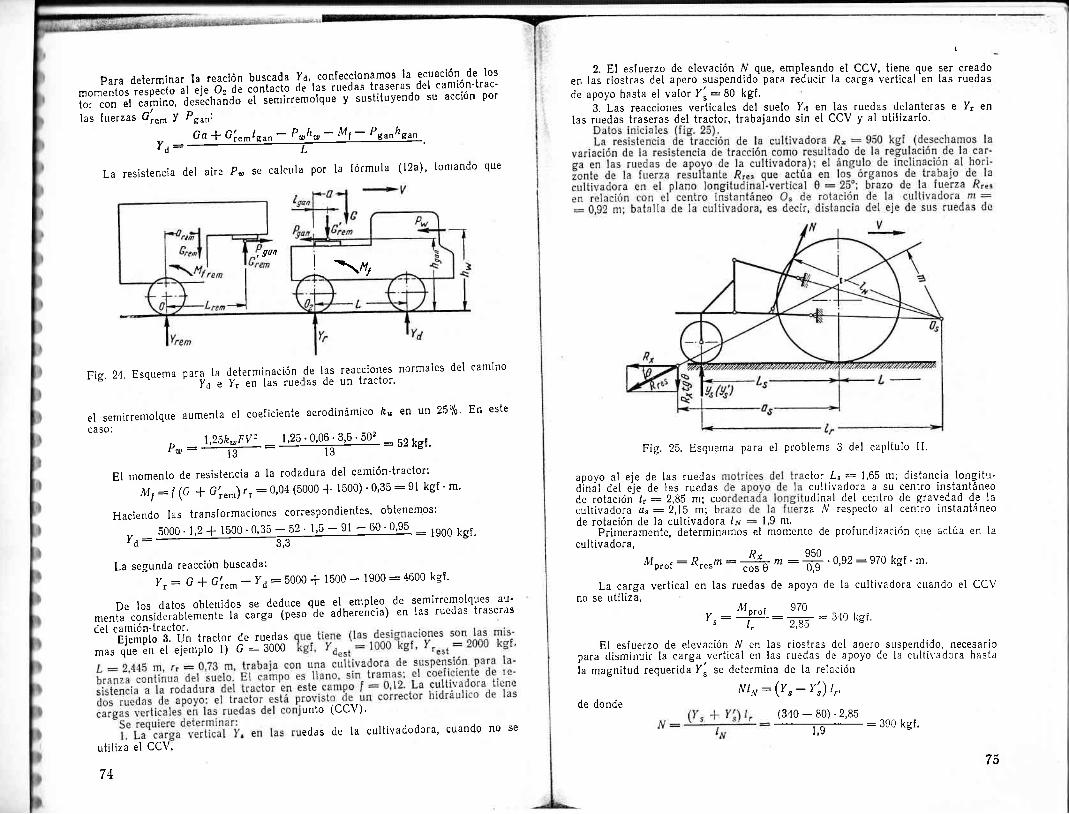
Para determinar Ia reación buscada Y¿'.confeccionamos la ecuación de los
momentos respecto rl .j. ó;';; ñtr.t; di'las ruedas traseras deI camión-trac-
tor con el camino, 0.r..ñíio .i'..ri,lir.*"tque y sustituyendo su acción por
las fuerzas of"* Y Pgrn:
, _ Go* G'r.^leun- Pth*- Mi- Pg^nhe^n ,.d__--_-----L
La resistencia del aire P. se calcula por la lórmula (l2a)' tomando que
Fig.24. Esquema para, la determinación de las reacciones normales del camino
l¿ e Y. en las rue' as de un tractor'
el semirremolque aumenta el coeficiente aerodinámico É. en un 25Yo' En este
ca so:
D - 1,25k,,,Fv2 1,2ó '0,06 ' 3-,! ' 50' : 52 kgf .t. -- ----E-:
-----ltEI momento de resistencia a la rodadura del camión-tractor:
M¡: l(O + C;e",) /r :0,04 (5000 + 1500) '0'35: 9l kgf ' m'
Haciendo las t¡ansiormaciones correspcndientes' obtenemos:
- 50q0. 1,2 + 1500'0,35 - 52' 1,5 - 91 - 60'0'95 : lg00 kgf.rd-- 3,3
La segunda reacción buscada:
Yr: G *G'r"* -Yd:5000+ 1500- 1900:4600 kgf'
De los datos obtenidos se deduce que el empleo de semirremolques au'
menta consideruut"*e.i."ü"."rigr-ipái""Je adhereircia) en las ruedas traseras
del camión-tractor.Eiemolo 3, Un tractor de ruedas
m^r q'r. in el ejemPlo l) G : 3000
unto (CCV).
edas de la cultivadodora, cuandg no se
utiliza el CCV.
74
2. El esfuerzo de elevación Iy' que, empleando el CCV, tiene que ser creadoen las riostras del apero suspendido para reducir la carga vertical en las ruedas
de apoyo hasta el valor l'i :80 kgf.3. Las reacciones verticales del suelo yd en las ruedas delanteras e Yr en
las ruedas traseras del tractor, trabajando sin el CCV y al utilizarlo.
Fig.25. Esquema para el problema 3 del capÍtulo II.
aoovo a[ eie de las ruedas ctor L.: 1,65 m; distancia longitu'¿inát aet eje de las ruedas cultivadora a su centro instantáneode rotación- J" : 2,85 m; co udinal del centro de gravedad de lacultivadora o" : i,lS n.i; b za N respecto al centro instantáneode rotación de la cultivadora l¡ : l,§ 6.
Primeramente, determinarnos el momento de profundización que actúa en lacultivadora,
.&fpror : R,".ft: afr- . : # '0,92:970 kgf 'm'
La carga vertical en las ruedas de apoyo de [a cultivadora cuando el CCVno se utiliza,
Y.:Ml'ot::9-3rorigr.'s l. 2,8-)
El esfuerzo de elevación N en las riostras del apero srrspendido, necesariopara disminuir la carga vertical en las ruedas de apoyo de la cultivadora hastria magnitud requerida fi se determina de [a relación
¡r/rN: (rs -Y:) t,,de donde
(340 - 80) .2,85: 1O ) rz¡§
1,9
i goo
L r,,
75

Los(2e):
valores de las reacciones Y¿ e Y' buscartas se calculan por las lórmulas
Y,:G*R,tg0-Yt-Ya'En estas iórmulas R' tg 0 : 950 ' tg25o :443 kgf ;
' Mr-tG*R'tg0-Y')r''Los resultados de los cálculos se reducen en la tabla:
rd : fd".t
Como vemos de los datos obtenidos'.la corrección
.n tñiu.¿r. de apoyo de ta cultivadorahaprovocadoi',ir'ri.ii ¿-.-.¿trer.hcia d.l tractor y, simultáneamente'
.ün'iu en sus ruedas delanteras'
de las cargas verticalesun considerable aumentoredujo un tanto la reac-
Varlante de trabajo Ys' kgt
Cuttivación sinet CCV
Cultivación utilizandoet CCV
I
¿"
Capítulo III
Dinámica general de tractores
de oruga
§ l. Trabajo de la oruga
Vr:arr,siendo or : Ve locidad angular,
2ñr, : l"r¡zr,
De la ecuación anterior tenemos:
fr: lr¡ * (31)
El paso del eslabón de la oruga aumenta un tanto a medidaque se desgastan las orejetas y pernos. Edientemente la magnitud del radio r,. Parael radio teórico de las ruedas motrices de Iminar por el paso medio real de todos los
77

orusa' Este se halla midiendo la largura'de las
p'E t'l tt¡ié unu.tu"iiitit plana y estiradas
diJ?'i;;;iáñ p*'¿t Iei-¿eteiminadb de modo
la ecuación:s (31 a)r,:AñÁ,
siendo n,,o" el número de revoluciones de las ruedas motrices
medido al desplazalJi"trt"i;; ;; 1^ -marcha
en vacío un tramo
medido de longitud S por un terreno ot^"fiát cualidades de adhe'
t"n$uuru la oruga este método para determinar el radio r' es suii-
cientemente Preciso'§ i T; ['" J§','r' i i..,
" n. i a d e r o t a c i ó n, l', 9:,1 1=^ * : 1' : I : lt; :::
dedel
i;'"'ü: Tl J
"
",ii X]' ."'i l.i i =
I 1:yi',"^*11, t eó r i c a d e a v a n c e
ii ^:i
;'- 3.'d;i. ; ; i ; ;' pái'iá' i g u i ent e r ó rm u I a :
y,: G#fl: o,o6l..rz,n,. (32)
marcha indicadas'
78
Pasaremos ahora al análisis de las fuerzas que cargan losdiversos sectores de las cadenas de oruga. Tomemós el ciso mássencillo de movimiento uniforme del tractor en un tramo hori-zontal por camino firme. Imaginémonos las orugas como uncontorno cerrado que envuelve cuatro piezas (figura 26): larueda motriz 1,la rueda tensora 2, los rodillos de apoyo delan-tero y trasero 3 y 4. Estando dispuestas atrás las ruedas motrices,en el contorno de oruga pueden distinguirse cuatro ramas: latrasera motriz, la superior combada, la delantera de guÍa, o fron-tal, como a veces la llaman, y la inferior de apoyo.
Fig. 26. Esquema de las Iuerzas que actúan en distintos sectores del contornode la oruga.
Si se considera el ramal superior comc un hilo libre absoluta-mente flexible, éste, bajo la acción de su propio peso, se combarápor una línea de cadena. En realidad, a causa del tensado previode las orugas y de las fuerzas centrífugas que se originan alarrollarse las orugas por el contorno, la curva de flexión se di-ferencia de la línea de cadena. En la rama combada surgen lasfuerzas de tensión Iq, Que aproximadamente se pueden considerariguales en todos sus puntos y que se determinan por la fórmula:
To: t4,,tI o "o'
siendo a: largura del tramo de la rama combada;q-peso de la unidad de largura de la oruga;
l¿o:flexión relativa de la oruga (relación entre la flechade f lexión h y la largura del tramo combado);
uo: velocidad de arrollamiento de la orllga por el con.torno;
g: aceleración de la caída libre.En la ecuación dada el primer sumando refleja la acción de
la tensión estática (previa) de las orugas, mientras que el se-gundo sumando, la acción dinámica ejercida por las f uerzascentrífugas, que tienden a estirar la rama combada.
El efecto de Ias acciones dinámicas aumenta considerable-mente a medida de que crecen las velociCades de movimiento d¿lvehículo; en los tractores de oruga de alta velocidad, éste puetleser dominante.
aq8ho
79

J
!
i!fl
I
I,i
Con el obieto de disminuir las iuerzas de tensión necesariaspara obtener la flecha dada de flexión, sc recurre al montaje derodillos de soporte bajo la rama superior de la oruga.
La rama motriz de la oruga está tensada con una frerza T2,cuyo valor se determina de la ecuación de los momentos de larueda motriz respecto al eje 02:
(f r- f ) r. : 1,"". *rf,.o,
4 fl."". rtrllrp t Tr z: -----;- t t o,
(Tt - To) r¿: lvl¡,
M,T-UI7',t_ ro rro,
de donde
siendo r.lr"". *: rendimiento que tiene en cuenta las pérdidas en
el sector motriz de la cadena de oruga.La tensión 11 del ramal frontal de la oruga debe asegurar la
rotación de 1a rueda tensora alrededor del eje O1. Durante el mo'vimiento uniforme que analizamos esta condición se expresa conla ecuación siguiente:
de donde
siendo r14¿ : ¡¡e¡n.nto de resistencia a 1a rotación de la ruedatensora;
r¿: radio de la rueda tensora.En la rama de apoyo de la oruga actúan las fuerzas verticales
originadas por las cargas del peso, éstas serán analizadas aparte,y las reacciones tangendiales del suelo. La resultante de las reac-óiones tangenciales X,' se determina de la ecuación (8), la quepara el movimiento uniforme que se analiza toma la torma si-guiente:
¡,t _V -D - '/r[-r,
,, .
La resistencía a la rodadura del tiactor de oruga se componede dos componentes principales de las resistencias ínternas dela oruga indicadas antes, y las resistencias externas, que sutgena consecLlencia de las deformaciones del suelo bajo la acción delas cargas transmitidas por los rodillos de apoyo a las orugas.
Adoptemos que las resistencias externas son originadas prin-cipalmente al asentarse en el suelo las ramas frontales inclinadasde las orugas, cuando sobre ellas ruedan los rodillos delanterosde apoyo (fig. 27) s de apoyo siguien-tes ruedan por [o el fondo del surcoya compacto, y, p mación ulterior delsuelo. A pesar de suposición, ésta se
BO
I
utiliza. comúnmente, ,y? que no aporta canlbios en el análisis dela dinámica genora I dil tiactor. r -' -."
La -resultánte de las reacciones del surelo, que actúan en lasramas frontates de tas orugas al ^iaii'ar';ii;;.i;; ;;;lr;; lro.r_iicie de,fo¡mable, se denoniina ;r;ii';;;;o .frontar. Dicha resisten-llc i e á.e.i;m¡.b r. ; ; q' A ; l,iiii'", " ;,1i ;'; ;ti,' i,:; ;;;?' Ei.'n :',.i j,:i..í :cia está inclinada bajo.cier.to ángurá , rá irpái¡i.i.^¿.r'".rmino
¡-1e alrica a un puntó.4 der secto-¡ áeriuero .á d.iá;;;.i¿n. ».r-compongamos la resistenciafrontal én dos componentes: lavertical )ru y la horizontal X¿.La primera ' de ellas no entrá
ponente horizontal de la resis-tencia frontal X¿ es la segundacomponente de la resisteñcia aIa roda dura.. De acuerdo con lo expuesto,Ia fuerza P7, €S decir, la resis-tencia total a la rodadura del tractor de oruga en marcha establepor camino horizontal, pLrede ser .*p..saEa p"; l;';;;, si-guiente:
o,:** r¿.
Fig. 27. Esquema del sector frontal cleIa oruga.
(33)
La razón de ra fuerza indicada pi al peso del tractor G es elcoef iciente de resiste.nci a a r a rod a á Lr r'a.- D érlñ á, d"l;á."i u"n.,i.n.,uforma que en los vehículo, a. ,-u.Ju.,'oo,rlu-i.i;;1, ñ;"J[ trac-tor de oruga tenemos:
f :!: AI , --xot a-Ga-r1..
Los datos de re[erencla sobresistencia a la rodaduracaminos y terrenos, están
El coeficiente de rendi
(34)
8l
o{
(;(tI,I
4 3ar, t¡19
!o, : rlfrlo.

Si se dividencontponentes quelas pérdidas Porrendimiento r¡', yel coeficiente qp,
siguiente forma:
En los tractores de oruga-el coeficiente de aprovechamiento
del peso de adherencia qr:+. De acuerdo con esto, el resbala-
miento de las orugas se caracteriza por la dependencia:
o:l(q,):l(+)Durante el trabajo estable por un tramo horizontal la reacción
de empuj e de la oruga Xr: Pgin * Xa. De esta manera,
) =r(+)a consecuencia de la relativa pequeñez de Ia componente de laresistencia frontal Xo.
Ya que el peso G, transmitido por las oruga.s, es más o menosconstante independientemente de la carga de tracción del tractor,el resbalamiento de las orugas puede ser expresado con suficienteexactitud en la forma que comúnmente se emplea durante los en-sayos y cálculos prácticos:
ó: I (Pc,"),
La carga de t¡acción del tractor influye en la distribución delas presiones normales a 1o largo de las superlicies de apoyo delas orugas y en el resbalamiento; todo esto se refleja en el valorde la resistencia a la rodadura del tractor. Por ello, [a resistenciaa la rodadura de los tractores de oruga se debe determinar altrabajar éstos con diversa carga de tracción. Frecuentemente elmétodo empleado con este objeto para medir el esiuerzo necesariopara remolcar el tractor que se ensaya con otro vehículo, no tieneen cuenta la influencia de los factores indicados. Los resultadosobtenidos con este método corresponden, aploximadamente, a laresistencia a la rodadura marchando el tractor en vacío.
§ 2. Determinación de la posición del centrode presión del tractor de oruga
Si las presiones normales sobre el suelo se distribuyeran uni-formemente a todo el Iargo de las superficies de apoyo de lasorugas, éstas podrían ser caracterizadas conro el valor de lapresión especílica media qr.¿, kgf/cm2. Esta medición convencionalse utiliza frecuentemente calculándose por la fórmula:
G./med _
2bLor ,
peso del tractor.largura de la superiicie de apoyoanchura del eslabón.
(35)
(34a)Io, : tlrtl ptl o.
En suelos minerales de humedad normal las pérdidas internas
en la oruga [orman hasta unconsiguiente, es muY imPortala estiicta observación de las
rdidas Por resbalamiento de lass, [o que es consecuencia de las
les orugas: el valor del resba'
lamiento en los regímenes de trabajo principales. del. tractor as'
;;;J.'i¿to , 2-4"olo, sienclo los índices de iesbalamiento relati-
"r*.át. estables, yá'qr. las orugas son menos sensibles que las
iLredas a la'u'ariación de las condiciones del suelo'En terrenos de Pequeña caP
turbcras no desecadas Y semideción vertical del suelo (creacimiento son considerablementebalance total de Pérdidas Lrn lugde las pérdidas Para la cneaci.onri¿.rhfrte cuan[o mayor es la presión específica de las orugas
sobre el terreno.- Las altas cLralidades de adherencia de la oruga.sri_ aseguran
, .*ntu del frotamiento de las su de las orugas
.on el suelo y a cuenta de las rea ales del suelo,
áué iurs.n en dirección contraria I tractor como
i.*ftr¿-o de su compresión por eslabones de
apoyo de las ortlgas.' La compresión del suelo en la dirección indicad¿ provoca la
re¿r.ci¿n áe la velocidad de avance del tractor. Al desplazarse
i;-;*g; hácia aclelante a Lrn eslabón, el tractor avanza a cierta
magnitud Al, menor que el paso del eslabón' La razón 4,*t*R"t'
el valor ó de resbalanriento de la oruga. De modo experimental
ésta se determina por 1a f órnula 6 : I - i; la medición del radio
cle rodaclura real r v el raclio teórico rr, que entran en esta fór-mula, puecl. r.r r.rlirada por el método
-más arriba analizado,
establecido por el GOST 7057-l4.R9
P*ur(
sicndo
44
G:I,O':
$-de cada oruga;
B3

No obstante, en la práctica la distribución de las oresionesnormales de las orugas por el terreno, en la mayoría de ios cusosno es uniforme.
2) la f uerza de inercia P; de las masas en movimiento deavance del tractor;
_ -4) reacciones del -ter_r-eno, paralelas a la superiicie del camino:la_fuerza de impulsión x, y la componente de^la resistencia fron-tal X¿;
la i"i['f¿.11.;:3';l:H,fj] :il,,1:i.:=J,o;:ac ones por separado de las orugas, incluyendola de la resisténcla frontal
84
f:,+:1j,..": j".:j,.,:r:91 d. ras. fuerzas y reacciones indicadas
: lT§1T' :i,. .:' .Í l* ": : lfllf: : ": É j ; "',
;'.''ii:i :' á.';; jJ ;' ; X i ; 3orugas es el planó Yur ¡c ruPtrrrtcle oe aDovo de lassión x". en el cual está díspuelta la iuerií-de" ímpul.
Denominaremos el puntoreacción normal del súelo I/
de aplicación de la resultante decentro de presión aet tráciái, IIalo
Fig' 28' Esquema de fuerzas y reacciones que actúan.en el prano Iongitudinalen er tractor ae orúga-en-'.i'.árá-i.n.rar de movimiento.
presron .rp, vamos a escribir larue[zas y las reacciones externacron con el centro de presión p;G cos o(Xn -'- ar)- (G sen u { p1) h _
- Pgunh'sun - Xaha- Pgrns€fl ygan (a - ao- Xp) : 0,
inal del centro de gravedad deleje geométrico d; Ias -iuedas
AS;
apoyo de las orusacentro de gravedaáy negatil.o si está de
(
(
(
(
(
(
(
(
((
(((
IIa
IIIIIa
86

h y h'*rn: coordenadas verticales del centr-o de gravedad del
tractor y el punto convencional de remolque' respec-tivamente;
hd:brazo de ia componente de 1a resistencia f rontal X¿'
De la -ecuación
dada hallamos que en el caso general de movi-miento rectilíneo que se analiza, el centro de presión del tractor.e desplaru retp.lto al centro de la lai'gura de apoyo de las
orugas a un valor:
Al determina r el valor de .rn hemos despreciado el términor¿h¿, ert vista de la pequeñez del brazo lr¿'*
iransformando ia 'ecuación obtenida con arreglo al trabajoen terreno horizontal con velocidad uniiornle, obtenemos:
§ 3. Distribución de las reaccione.s gormalesdel suelo a lo largo de la superlicie de apoyo de las orugas
La disposición del cent¡o de presión determina el punto Ceaplicación de la resultante de las reacciones normales del suelo.
independíenles, que se agrupan alrededor de cada rodillo deapoyo. En aquellos casos cuando los rodillos están dispuestos contanta frecuenc[a que casi cada uno de los eslabones de la oruga,asentados en el suelo, se halla bajo su acción directa, la super-ficie de apoyo activo se considera toda la superficie de apoyo dela oruga. De acuerdo con los datos experlmentales existentes, estose consigue cuando la relación del paso de los rodillos, o sea, ladistancia /.o¿ entre los ejes de los rodillos vecinos, al paso deleslabón de la oruga /g5¡ s0 encuentra en los límites l¡6¿ : /ss¡ (< 1,5 + 1,7. Generalmente, estas correlaciones se observan enlos tractores de tipo agrícola con suspensión semirrígida del basti-dor y con gran paso del eslabón. En la tecría de los tractores sesupone que el diagrama de presiones normales en el suelo tieneen estos casos un carácter lineal. Estas suposiciones son aproxi-madas, ya que en realidad las presiones máximas se concentranen la zona dispuesta alrededor del centro de presión, y su valordisminuye a medida que se aproximan a los bordes de la super-ficie de apoyo.
Teniendo en cuenta la suposición indicada, los diagramas pue-den adoptar, dependiendo de la posición del centro de presión deltractor, las formas representadas en [a nig.29 y designadas allícon las letras correspondientes:
a) rectangular; este diagrama caracteriza una distribuciónuniforme de las reacciones normales del suelo a todo el largo dela superIicie de apoyo de las orugas;
b) trapezoidal; para un diagrama de este tipo las ceaccionesnormales del suelo se distribuyen irregularmente a [o largo de lasuperlicie de apoyo de las orugas;
(Gseno+Pt\h+f p: ---- G cos oT
(36)
- ax. (36a)
Un desolazamiento considerable del centro no es deseable:esto empeoia la adherencia de las orugas y aumenta la resisten-cia al rodamiento.
Las máqulnas suspendidas ejercen sobrede la fuerzá más compleja y diversa que I
flu ón del rtro de Presiósu o eleva o al realizarse Lrtiliza expuesto en el capítuloan r la d al de los tractores de
ruedas con máquinas o necesario puntualizaroue en los coniuntos e oruga' la carga sobre las
iuedas de apoyo de suspendidas debe- corregirseteniendo en óuénta la tiva ejercida por dicha carga
o sea, de tal manera que elsión del tractor no sobrePase losa total a la rodadura del tractorina sea la mínima.
resión del tractor, a la Par consigno del desplazamiento lon-46, Por ello se debe elegir la
del tractor, partiendo de su desti's de los aperos de labranza Parar está destinado.destiilados principalmente Para
trabajos con carga de tracción en el gancho y- con máquinas sus-pendidas que se áisponen en la parte trasera del tractor, el centroile gravedád se sitúa generalménte un tanto hacia adelante delcent-ro de las superficies de apoyo de las orlrgas, a una distanciaao ñ * (0,05 + 0,08¡ Lor. En los tractores de oruga de tipo in-
86 8i

^. .c).triangular, c.on el vértice en el borde delantero de la super-ficie de apoyo de las orugas; esta es la forma tímite de un dia-grama irregul.ar, para el cual en la transmisión de la presión alsuelo aún participa toda la superficie de apoyc de las orugas;. d) triangular, con el vértice dispuesto éntre los bordes ex-tremos de la superiicie de apoyo de las orugas. para este dia-
Denominemos la relación * coeficiente tle desplazamientotractor de oruga y designémoslo con la
Fig.29 Diagramas aproximados de cálcu-lo de las presiones normales sobrc elsuelo de los tractores de oruga para
f¡odi/es¡<1,5+1,7.
del celetra econsid rlímiteciente de desplazamientodel centro de'presión, yaque al rebasar este valbr
, Designemos Ia largurade la superficie de apoyoqLle se utiliza de Ia orugapara vp ) r/o con L:r,Lomo se aprecia en el dia-grama inferior (fig. 29, d),en este caso:
lt.rp:0,5Lo¡ - ?r
de donde 3
LL, :3 (0,5¿o, - rp).La inclinación de los
diagram.as., .siendo irregu-lar la distribución de Tasreacciones normales delsuelo.a lo Iargo de la su-perttcte de apoyo de Iasorugas, .no es sólo posibleen la dirección sehaladagl. ln fig. 29, sino tam-Dlen en sentido contrario.
Fig.30, Diagramas experimentales de laspresiones normales en el sueio:-' "'-n,ii:l#,.1,"" o?1r.,.^li,:-ll= í,;?áIi."Il',:n,'%:ñ:,fiitg;,l,;ii,;Íf;L;presión es el índice prin- dá rue¿ al con'í;;l";,s'"
;ioil"oX:,:::r:t^T11r' ra distribución de las presiones
t;, 13. ;; : -Í
;, ¿?Hi r ; .,1r eiii. ü' á'Jr i:,. i#,,, :','jlff ' #?H.§:
síenrto ior-roo,^. ^j_es_.el diagrama de tr. pr¿;ü;;.'nárrrto.,
V
grama en la transmisión dela presión al suelo sólo par-ticipa una parte de la super-ficie de apoyo de las orugas.
Es evidente qLre la reac-ción normal resultante delsuelo debe pasar por elcentro de gravedad de la Ii-gura que represente el dia-grama. Por consiguiente, sise concce el diagrama es po-sible determinar la posicióndel centro de presión deltractor y viceversa, por laposición del centro de pre.sión se puede juzgar acercadel diagrama.
Con un diagrama rectan-gular el centro de presióndel tracior se dispone en elcentro de la superficie deapoyo de las orugas, o sea,en este caso la magnitud deldesplazamiento del centrode presión del tractor esigual a cero.
El diagrama trapezoidalcorresponde a Ia posicióndesplazada del centro de pre-sión, con ello el valor del
,l(
(
(
(
(
(
(
I(((((((((II¡aaaooeoe
0
6l
desplazamiento, en ILrncióndel grado de inclinación del diagrama,-puede tener diversos va-
lores, incluso hasta el valo¡ máximo ro : ?. Cuando el despla-
zamiento del centro de presión alcanza el valor máximo indicado,el diagrama trapezoidal toma forma triangular. Efectivamenteie.l centro de gravedad del triángulo está dispiresto a una distanciade l/3 de la altura de la base, o1ea, a una distancia
. El coeficiente de des-
0
Iv
norm a les,
ff \V
8B
,rp:0,51o, - +: + siendo igLra Ies las conJic¡ó;.;^;F.ü;t.r:
89

l_ _
tipo AT-54 (DT-54), en el cual if :3'4 (esquema a)' un
tractor de transporte de orugas con una relaciót *:4'5 -i 6
y en los rodillos de apoyo de los carritos de balancines delanteroscon Y¡. La primera de ellas pasa por el eje 02, €n el que oscrlanlos carritos traseros y la_ segunda, por el'eje ó, de osóila,.ión delos carritos delanteros. La iesultante de lás reacciones Yz e Yt
orugas montado en un,tractoriagramas se reIieren al movt'
ar de ser diierentes los vehícu'ciones Y métodos de. realizarselevados los valo¡es de ta razon
nes normales no se realiza Por
ales, incluso al trabajar en cam-
Los valores más desf avorables de la relació" * se obtienen
para las orLlgas con suspensión elástic' Por .rro, puru"l;;"i';;;;; ¡;. ;' característica
aproximada de ta d'tlírlti'ioi de las males' pueden
i\'r;i;"i;;-uáíoilr-ii to' reacctones sueto en tos
90
Fig. 31. Esquema,de fuerzas externas v reacciones que actúan en el tractor consuspensión'de bal¿ncín de dos apoyoé, para la márcha estable con fuerza de
tracción en el ganchg.
en relación con el centro de presión del tractor debe ser iguala cero, obtenemos Ias dos siguientes ecuaciones de equilibrio:
Y2+Yt:G'I¡ (0,5L",, * xp) - Y2(0,5L.u, - rp) : 0.
siendo Lcnr: distancia entre los carritos de balancines. De aquí
Yz:G(s?=),r,:r(qf.:) (37)
as ecuaciones citadas, del peso del tractor node los sectores de las orugas que descansaninfluyen en el valor de las reacciones Y2 e Yy
e su pequeñez, no se tuvo en cuenta el mo-mento X¿h6, originado por la componente horizontal de la resis-tencia frontal X¿.
De la fórmula (37) se desprende que cuanto mayor es lamagnitud de desplazamiento del centro de presión, tanto más irre-gularmente se distribuyen el peso entre los carritos de apoyo
9l

delantero y trasero. Siendo rp:0,5 L.r. los carritos correspo.n-dientes, délanteros y traseros, dependiendo de la dirección deldesplazamiento del
- centro de présión, se descargan completa'
meáte y todas las cargas originadas por el peso se transmitenúnicamente a través de un par de carritos'
Las reacciones Y2 e Yl se descomponen por cada uno de losrodillos confeccionando para ello las ecuaciones de equilibrio res'pecto a los ejes de oscilación de los carritos.
Fig. 32. Esquema de la suspensión de balancín de tres apoyos de un tractor deoruga.
de e.stática es posible componer únicamente dos ecuaciones deequilibrio:
Yt*Yz * Irs: G;Y, (Lu, r * xp) *yzxp - ys(L"u,: _ rp) : 0,
II
Conociendo la carga Qro<r(i) en el rodillo dado-, puede deter-minarse el valor g*e.i¡ de la'iresión máxima de 1a oruga sobreel suelo en la zona de iú disposición por la fórmula:
,:, É¿¡.Qro¿ (l)4^¡* (') : --4;;- '
(38)
suelen emplearse suspensionesUno dc los esquemas posiblesde tres carritos de balancines
de donde
erru ff)3 puede tomarse á¿¡.:0,5.
Teniendo en cuenta .Qu9 yr -: ftcti. yz: fzcz y ys:
fscs, slendoct, cz y.ca. los coeIicientes de rigidez-de ros-.ótr.rponáiért., .u-sortes de la suspensión, sustituilernos Ia ecuación ánteiioi por lasigLriente:
, _r,f L"urz+fiL"rrt,,-W.Junto con las ecuaciones de estática antes escritas la ecuacionobtenida permile determinar ros varores b;.¡;á;;-;é* tár' ,.u.-ciones Y¡, Y2 e Y3.
En aquellos casos cuando se requiere una superficie de apoYode las orugas de mayor iargura,de tres apoyos de uno u otro tiPo.de tales suspensiones, compuestosobre los que, a través de resortes verticales, se asienta el bastidor/ del tractor, se da en la figura 32.
Para determinar las reacciones verticales Yr, Yz, 13, Que actúancorrespondientemente sobre los apoyos de la suspensión son ne-
cesariás tres ecuaciones. No obstante, utilizando las ecuaciones
92
d(fCI

indicados puede regularse en cierto graCo variando el tensado y
i;";G,d*'á.t-.l.,riüü-étaiti.o de [a suspensión de Ias ruedas
tensora s.
EJEMPLOS DE CALCULO
Ejemplo l. c rrígida trabaja en la
agricultura con ti joi'de movimiento de
tierras con una en ctor'
Se debe de 5 de Presión del irac'
una distanciaP ,^nlr r",, 6000 ' 0.48
r p: j3h4: - l, ooo : o'2{ m'
CorrespondientementeelcoeIicientededesplazamientodelcentrodepre.sión
xp 0,24 -^,vo:l--:-17-:u,'', "o¡
' esplazamiento del centro de presión se
o del centro de Presión del trac-uiadora sLrspendida elevada, pre-
o'ordenada iongitudinal del con'la ecuación (26),
. Aa * Cra. 12 000' 1,2 + 2 400' 4'368 - t ..re ñ
ac,f : - aTT; : @ -'¡lrlu ¡¡r'
La magnitud buscada del desplazamiento del centro de presión
Íps - ¿I - asr: l'2 - l'728: - 0'528 m'
o sea, el centro de presión se halla delante.dcl centro de la super[icie de apo}'o
i."il. ár;;;;.-Cór,.rpáñá'l.t't.*.*.-át coef iciente de desplazamiento del centro
de Presión ro. - o,b2g,n=:fr:-rA :-0.22.
Ejemplo 2, Un tractor de oruga de arrastre. (iig 33) se mueve uniforme'
nrente con un paquet;;;'trán.át fior un tramo horiiontrt del camino de arras'
tre. Los troncos .rtan "coro.á¿* Joi, ru. bases en e[ tractc¡r y las cúspides se
arrastran Por el suelo'
94
Fig. 33. Esquenta de [uerzas de un tractor de arrastre.
o arritos de balancines de apoyo; dca¡:1,25 m es la coorde-n del centro de gravedad del tractor; la coordenada cónico'lon-g m, la verticaf áca¡: 1,8 nr; ap: coordenada tongitudinalb de presión P.
Escribamos [a ecuación de los motnentos en relación con el centro de pre'sión Desechando por su pequeñez el momento X¿lra creado por Ia resistenciafrontal X¿, tenemos:
G (o"u, - or) -(60 + p sen «paq) (ao- nt)- Pcosooroá.r, : ).
Err esta ecuación E:'1, es el coeficiente iue indica la parte del peso delpaquete de troncos que se transnlite al tractor,
,E0 -; 'c,15o :0,3G
P es el es[uerzo necesario para el desplazamiento de la parte del paquete que
resbala por el suelo, cúyo peso
Q (r - i) :0,45G (' - +) : o r5G.
De la ecuación de momentos, haciendo cos crpa q : l, obtenemos:
Ga"o, * (5a + P sen orrn) nt - Ph"u,ap: C+gQ+Psenopaq
Examinando el esquema de Ias fuerzas que actúan en la parte del paoueteque §e arrastra, se puede adoptar con suficiente exactitud:
p: e (l - q) (i Érq gosoparr a serr cpaq) o C,L-o1 (lpu,r + serrupuq) = 0,ll6C.
95

---t
El valor obtenldo de p ^ro
rntr.oducimos en ra ecuación anterior: sustitui.mos también en ésta Ee po,- 0,3 c, despué; d; i; ;;rih;liñ;r'.t:'" ' "
¡¡¡;i,ti;fu ;fi{ilfl sH:iild,.#:li*t,,n,..._,lrtTriit j,*T,[I/" : R. tgO = I g00 . 0,22 : 896 kgf.
, - . Prrr.
. determinar la posición del centro de
ii,,iTilift lli*jr:r*fi ,'r.:,.r$,llrlffi iñjrsrqsei.ilii.r,#i:_d
G (ao *..p.) - R, tg0(a. * a - ao_ rp.) * r.(L" * a _ ao_.r0.):0,de donde
aP:= 0,86 m.
. Para dete¡minar Ias reacciones y1 e y2, que actúan correspondientemente enIos carritos detanteros y traseroi a.i 'tá.tiir,"[.r;ri;;'i;;.;";;o"l'J'!i'u'ui.nt.r,
Yr:Y fft Yz:Y -Yt,
Y:G + EQ + Pseíopaq:li2?en donde
;;.[.:.u..,ón no¡mal total del camino aplicada en el centro de presión del
De aquí hallamos que
Yt: 1,32}ffi :0,535G; Yz: l,B2c-o,EB5c :o,TB1c.
De los datos obteuidos resulta que los carriios traseros están cargadoscasi ^t,5
veces más que los delanteios;'[ó,'ñ.-roil"á, i'.1i"?itá-r'-tr..i.ro. ti.-nen 3 rodillos y Ios ilelanteros 2 rodiiioi;rJ;-;n;.
Fig 34. Esquema para determinar el centro de presión de un tractor de orugaal arar con un arado susiendido.
I?ff,.T io" ii "i,i.
i,,,"_o 1".;, j-. ql., li: co n d ic.io ne s de I p ro b I e m aescri b i mos de n uevo t u ..'L,l d i.; n Xn' r;il,, ;Ti;l:,,r1lt:: /.:R,tg0,
&1ge(o.-L.) 396 (1800 - 1350)r." - ---:-J--J-I-_Y UJU (¡ouu - l,Jbu)c _60__30,3mm.
EI val_or .9., rr. obtenido jndica que el centro d
3§:F'i1i jülr".,z;,¡i;,;t¡::#:,lrT:HdJJn:,#j,jf #":,i,liiiris
llt_i;qq-;,; ¿j!tí,iJrJil'j:;""j:,1;f,3:i":'";'""1,-:,9.-,pl::jsl está dispuesto a
tr5;ii.f:i#:jlTtl,,T¡l::iff ir,:tr*',"-tr:'fi.,r,ft rlr:df ,l;,lqel he-,
. Ejenrplo 3. Un t¡actor de oruga con unbrrnza. de una rastrojera f tig. ¡+ll-ei-i.rüomovrntiento es uniforme.
arado suspcndirlo realiza la Ia-es horizontel. La velocidad de
96
((((((
tt3
C
C
C

Dinámica dede
tracción y economiacombustible
estable por caminoa cero.
La relación
para el movimientorendimiento tolal del
Capítulo lV horizontal las potencias N¡ y N¡ son igr-rales
Neun * &rtr
por terrenoy la relación
il*rn(4 l)1'ltrr": ff, - (tr', l- Nut¡) '
determinada para las mismas condiciones de marcha se denominarendtmiento de t racción.
Al trabajar el tractor sin Lrtilizar el árbol de toma de fuerzael rendimiento de tracción es
,,. :Ig*. U2)'¡ trac N "
Durante el trabajo estacionario del tractor el rendimiento totaldel tractor es
r : rp.,iendo Io,: rendimiento del accionamiento del árbol de toma de
fuerza o la polea, según qué mecanismo tra[aja enel caso dado.
El rendimiento de tracción deI tractorcomo el producto de tres coeficientes, quepérdidas que surgen durante el trabajo,
Irr"": !¡rl6t1¡, (43)
donde I t, : tiene en cuenta las pérdidas mecánicas en la trans-misión;
Io: las pérdidas para vencer el resbalamiento de lasruedas motrices;
I¡: las pérdidas para la rodadura del tractor.Cada uno de los coeficientes enumerados puede ser determi-
- - M,*o
,t1¡ _ M¡ltr
siendo it, : relacíón de transmisión durante los ensayos.
l',I:
establetractor
(40)
horizontal se denominatIIrt
0
I
r)
0
t)
0
r)
e
t,
§ l. Balance de potencia y características de tracción
El balance de potencia det tractor es una ecuación que
muestra como se consume durante el trabajo la potencia desa-
;;;iüá; pái .l-motor del tractor. Ya que lá,potencia lel motor
debe ser igual a Ia suma de las potenci,as empleadas para superardiversas ñsistencias que surgen durante el movimiento, en[onces'
en el caso más comúri, ta ec"uación del balance de potencia tiene
el siguiente asPecto:
N,:Nt, f No* N¡t N¿ tNi * Ngun * Npr * Natr' (39)
Los términos del segundo miembro de esta ecuac'in determi'nuiiá. polencias cons"umidas por diferentes usuarics y la con-
sumida:Ntr: pztá vencer la P.oS .9e
la transmisión otacióndel árbol cigüe ces;
1v6: para vencer" el otrices;
Ñ"¡: Para vencer la del tractor;N,: para vencer las ram_pas; . . .
Ñi: páru el cambio de li velocidad de movimiento del con-
junto tractor;N-,": iara la tracción de los aperos de labranza y. carros de" ÉrL¡
iransporte enganchados -al
tractor o remolcados por
otro método;Nn,: para vencer las pérdidas mecánicas en el accionamiento
" hel árbol de tomá de iuerza;Natr: para el ac to de la rotación del mecanismo
acoplado al de fuerza'Las potenlias N¡ ener diferentes signos, depen-
diendo Jsto ¿. ti .t' baja trna rampa, si se acelera
; ii.;. iugu. la reducción de Ia locidad de marcha A[ subir yn..l.iárr.'fás potencias correspondientes se toman con el signo
;i;;: ;itri;i )i decelerarse, coñ el signo menos' Durante rnarcha
98
puede ser expresadotienen en cuenta las
99

-ti
I
i.i
I
tI
I
i
I
tI
I
y que corresponden aJ tipo de tractor que se analiza y Ias condi-ciones del suelo elegidas. -'---"' Y'
I:r"l:ry"r._[::,r^,,11,!_r, partiendo del eje de las abscisas, un
:i,uT:[',i J,. :t]i * ":_i: l:o :: i.lt I é, r, .. ü ü ;'d ;;i, á ; " i;" i""'t #l:::, l.::i 1,9.
l^,r "j-"r,ffo, I I o¡ i r- á*ii.á o ;;p ;;;i' f.:; ;;-. Jr" ffi ;
;:'.ti,o i :' I ; I
: " i : "'r : -q: l',:. I l'!,:;;l' ü; i;';i"d!.i;i'' ? iü, x i ;
i.:::i, 9:. li :?.1' ?1": :ión !e le .,.g, ñ,t," ti"ü;i ";;i"i: ;r",á;:Í,:.H* : :1: "1, : _r,, p.l:l_. ii ¡,s,, .o?i ñi;; ; ;; i;" I;;,i; ! p é r d i.Í?::: á
I lc a i en r á t,, n iririe"; "iñ;ié;
tI.n.'', ["],,,ffi ,":,Tj:tante N. (l - lrr), ina.p*áián1áimente de la fuerza de tracciónen et gancho con
'la que'trabajá ál'irr.t* i;";:;á: ,i;,TiTl::
Psm
Fig 35 Balance de potencia y característica de tracción potencial del tractor.
=s§\-
Luego, uniendo los extremos de los segmentos con una curva,obtenemos er segLrncro r..t;;'1.ñ¡*lo'.ón riñ.r."iráiinadas),
((((
(
((
(((f(
ilt" =iln ( -?t")
-/:- _-:_..-=1|-
l0l

que representa en la gráfica derie potencia por resbalamiento.
.
Antes de pasar a rePresentarla rodadura, tracemos Ia curva deque representa la variación de [au,, en función de la carga en el
75N,vt- D
-,tg
la potencia desarrollada por los órganos motrices N. : -fi4 , ob'
tenemos
necesario tener tractores de diferentes clases, para cada una delas cuales debe ser asignada su zona de tracción.
La composición deí sistema de tractores en la URSS se basa¿n el principio de las clases de tracción (la así denominada no-menclatura de tipos de tractores): De acuerdo con este principiotodos los tractores se dividen en una serie de clases, a cada unade las cuales se le asigna una fuerza de tracción nominal en elgancho determinada. El tractor debe desarrollar esta fuerza detracción en una rastrojera sin labrar de humedad normal (aproxi'
tipos permite satisfacer todas las necesidades de la economia na-cional con un número relativamente reducido de clases de trac-tores, cuando cada clase se utiliza de modo racional. Pa¡tiendo
llzar movimiento de tierras y otl'os trabajos especiales, en condi'ciones que en sumo grado se diferencian de aquellas en las quetrabajan los tractores de tipo agrícola. Por ello, el concepto dela fuerza de tracción nominal, estipulado para los tra.ctores agríco-1as, es inaplicable para ellos. Generalmente, como fuerza de trac'ción nominal de los tractores de oruga industriales de gran po'tencia se toma el valor (0,8-1,0) C, siendo G el peso de explo'tación del tractor.
El rendimiento máximo de tracción del tractor se obtiene enel punto de la característica potencial donde la suma de las po'teniias Nu * Nl, que se consLlmen para el resbalamiento y larodadura, tiene el mínimo valor. Es evidente que en el punto in'dicado el prodr-tcto de los rendimientos rloll alcanza el máximovalor. La fuerza de tracción en el ganchc. correspondiente al ren-dimiento máximo puede tener diversos valores, en función de lascondiciones del suelo.
Examinaremos cómo transctrrren las curvas de las potenciasde tracción en los tractores con transmisíones escalonadas. Paraello, elaboraremos grá[icas en las cuales junto a las característi'cas potenciales trazaremos las características de tracción para di'ferentes velocidades. Dos grá[icas de este tipo nos ofrece la fig.36.Las características potenciales están representadas con líneas de
trazos y Ias características para distintos grados de reducción con
balance de potencia las Pérdidas
las pérdidas de potencia Paraoeloi¡dades teóricas del tractor,
velocidacl teórica de movimientogancho. Teniendo en cuenta que
'tg't -L
tIt,
)i)
r)r)
D' g¡n
75N r+lc'
está trazada la curva u¡:
rodadura del tractor, se de-r)
r)
\l!f\ltll
Según esta fórmula en la gráfica: I(Pnrn) con una línea Iina continua.
L'a -potencia
N7, neC€soria Para latermina por la fórmula:
tfre
r0
tb
ú
'D(o
r0
t0
t0
,'!g)
,e+e
oo
* Según ei método aCoptado en diciembre_ de 1969 porde la conlisión permanente de agricultura del CAME.
el grupo de Irabajo
r03

Iíneas llenas. Loscifras romanas.
AI trabajar eltracción crece a
desde cero con la
números de la velocidad están indicados con
tractor con cierta velocidad, su potencia demedida que aumenta la carga en-el gancho,marcha en vacío hasta el valoi máximo Vgun,n.*
Dt gon
§§
§
Fig.36. curvas de Ias poLencias de tracción para tractores con transmisionesescalonadas.
este caso, el punto N*,n*á* está dispuesto en la característica po-tencial de tracción En la f ig. 86, a los puntoS ffson,.á* con todaslas marchas están dispuestos de la forma indicada. En.io sucesivo,al aumentar la f,uerza de tracción en el gancho, comienza Ia
104
.7 X ,zí¡i¡ -/ I- I
_ pgan
}ir,Í" r:* r,u;"rl j: ^l_r^. :*11", cllrvas
.d a da.s úni cament e en dos,
i"t"' : i'-o T rT : I :',t:'-'-'^'^'^,). i 1 : i I i - ?; h ü'l;.- ; ffi i ; ;' ; : il! iT:l:::i::"_l:-,I1:-99,tracci'ón .stan iltrá;;; ;;tl ¿;;;^";.'il #.:::1.:':t i:r^
p_otenc i a I ; en I as. ot.i, -¿o, .rr;.,' ;bt.;iá r:".;f i;primera.y segunda marchas, to, prnto. ¿. lár"ir"j.;;i;:";r#;;:de tracción están cifrrq.l^".1^k^:^',r^ i^-^--- ,Í: ",.Í;:lu:.:: :r i : :t^1,"d: : o
io lt"_'qé i á"c u,,. té,t t ;;;'p;";;i:i:,,;;que para estas marchas ra .potóncia de tracción óá.á"rá"á'r.¿r-cirse todavía antes de ser alcanzada l-i ,rr. ^
nnmnlor, ¡-r *^+^_((da la carga completa del motoi.con ta primera marcha resurtó en-;ür;i;t""" *;lírr"dri l"r'rgu, .r
l"^l"^i. !"i _ co-mp I eto. Es ca ract erísti ca
-a p r o- i*;i;;;;t.'iá r ¿ i r-
sobrecarga en el motor, cae slltambién se reduce la potencia- dcurvas de las potencias de tracc
los órganos motrices, la poten-disminuir aún antes de alcanzar
posición 9g lo., puntos para el trabajo al tru.iórur'Ju"iu.au, .nterrenos blandos.
§ 2. Cálculo de tracción del tractor
os del.tractor pueden sertiva únicamente'cuando -sle
ij 1,...""¿ J?,1 ;"i T, ff ,rt.i:
., Los parámetros .enumerados se obtienen como resultado delcálculo de tracción del tractor.
rt(l(t,(1
(,(rl!
frfrlfl3
3
3
3
3,3
105
a

(44)Ót.r": "+,tn
siendo P, y P;: fuerzas de tracción. nominal en el gancho d:lt;;:i;; qtit ig calcula en el orden de la n'ésima
if{lr:J ú;;t'; de ra crase que re Precede
":)ir¡¡tiiite de expansion de la zona de tracc[Ón
del tractor'e - 1,25 + 1,3' Para los tracto'n otras clases generalmente se
Q'o.rltGnt'* : P n * l'G'n6*'
siendo a, : valor del coeficiente de utilización del peso de ad-, , per
herencia, que se puede lograr en las condicionesdadas del suelo con la magnitud de resbalamientopermitida de las ruedas motrices;
A, y l,:coeficiente de carga de las ruedas motrices y coefi-ciente de resistencia a la rodadura, correspondien'tes a las condiciones de trabajo adoptadas.
De la relación expuesta tenemos:
Teniendo en cuenta 1a considerable redistribución del pesoentre las ruedas delanteras y traseras al trabajar con gran cargaen el gancho, en la fórmula (45) para tractores con ruedasmotrices traseras se puede hacer 1". : 0,75 + 0,80. En esta mismafórmula para tractores con todas las ruedas motrices se toma1 _ll.f
- L,
Para Ios tractores con ruedas de neumático los valores calcu-lados del coeficiente de utilización del peso de adherencia,p,o",:
(45)
: 0,5 -i 0,65,neumáticos de
Si la carga
dependiendo de la estructura y Ias medidas de loslas ruedas motrices.
necesaria para elevar el peso de explotación delmagnitud G,¡6* Se u!iliza directamente para com-de las ruedas motrices del tractor. oor eiemplo,
(47)
existenies de los tractores de oruga,por la fórmula (47), en la mayoríacargas complementarias. Esta situa-
tractor hasta lapletar la cargaal fijar en laslos neumáticos,
de las ruedas motrices del tractor, por ejemplo,de las rueoas molnces oel If aclor, por eJemp lo,ruedas pesos complementarios o al llenar de aguasu peso puede serr hallado de la correlación:
Go: l, (G,na* - G*in). (46)
Para los tractores de oruga, la fónnula (45) tiene el siguienteasp ecto:
En los tracto¡es de oruga toda la carga se utiliza en calidadde peso adherente, por lo tanto, al transform,ar la fórmula (a5),el coeficiente 1.. se toma igual a la unidad; además, el coeficientede resistencia a la rodadira Ir se sustituye por el coeficiente i',que tiene sólo en cuenta las resistencias externas a la rodadura,ya que para vencer las resistencias internas en la oruga no se
requiere la adhercncia con el terreno,'En los cálculos según la fórmr-rla (47) se puede adoptarq., :0,6 -i 0,65, y f'x0,5lr.
'perCon los pesos proyectadosmagnitud G*¿* reQueridalos casos se alcanza sín
lade
t06t07

ción puede cambiar a medicla de que se reduzca la inversión de
metal en los tractores de oruga.La diversidad de trabajol que realizen los tractores, dlcta [a
neoesidad de tener en ellos'tres grupos de marchas:a) marchas auxiliares para ó5téner uelocidades de ntotintiento
rnull peqLt"eñas; se empleán pa!a realizar. trabajos.. durante Ios
cua"les las velocidades' de márcha permitidas son limitadas pcrlas co I proceso tecnológico que se- realiza;.
b) incipales, con las que se efectúan la mayoríade las agrícolas;
c) tiansporte, utilizadas para transportar cargasy recorridos sin carga.' Ejemplo caracte-rístico Ce la necesidad de velocidadesp.quáñai puede servir el trabajo para plantar plantones. Eniaso, la velocidad de movimlento l/ puede ser determinadala correlación siguiente:
601n, nrv : -¡qt- '
siendo lnia : distancia entre los nidos cie los plantones,i: número de plantas que el operario puede
muyestepor
(48)
m;transmitir
algunos casos se
trabaios de plantación 1a velocidad de movimiento debe se¡ menostraDaJos ode I km/h.
El número de vehículos que debe trabajar a vnequeñas es bastante grande y los requisitos que
ieláción con la elección de estas velocidades son
Úependiendo -de l.a clase de tracción del tracto-r, I
iorbs calculados de las velocidades muy pequeñas se toIIra eII tos
ií*iio.0.25-1.0 km/h. ó 0,5-1,0 km/h; en algunos casos se
col a s.
108
obtenemos:
^ .. . Pn * ¡l (O.in + Gó)u,'rr : YnrrJno,-q}¡.¡;
109
Denominemos aelocid.ades nominales o calcutad.as det lractorlos aalores de sus aeloci.dad.es lr¿;:;;;; con et número de reaolt¿_ciones nontínal del árbol.det.moioi.Torn"*o, que el número demarchas principales 9; igual a z.'Vamos a ,i.iig;rl-.i vatorcalculado de la velocidad-principri sii.rior.on Iz"-¡,¡, y el valorcalculado de Ia velociclacl irincii,ui irürio, con /.,1-,Lá iólacionV ntzl*f; ta ilamaremos gama de aelocidades principales nominalesdel traclor, y la designaremos por ó"^-.
La. velocidad I/nr. d.ebe asegu.rr'i, carga completa del motorcon el valor nominat det par rñotor tvl^, iti;rb;l;;';j'tñtor conIa [uerza de tracción nomlna.r un, ut grn-n".'É;'¿;i.ir.ó".t p.rode explotación del tractor es igual u ñ*¿..La velocida d Vnc) debe utilizar.. tiiUr¡rndo con la fuerza de
tracción mínima en el ganch"d:, para la que está calculadoel tractor. En el caso dado es suficiente tener er peso de explo-tación mínimo del tr-actor G,nin y pr.a. ser permitida una cargaincompleta del motor.
Las consideraciones expuestas se expresan con las siguientesecuaciones:
[P" + f, (G.,^ + Gr)] r,: Mni¡,f)¡,i
(q: + i,G^r^) r. : Y..rntr tnit, ¡,¡\1,,
((((((
(
(
(
((
(l(t(1(r(r(r(r(r"('(,,(r
siendo it,tit, (,\
tty fz
rl rr Sc adopta
por la inf erior
la rodadura del[uerzas de t¡ac-gancho, respecti-
carga del mo-:0,85).igual para Ias
y teniendo en
: relaciones de transmisión del tractor a las velo_:j1:1.t principales inferior y superior, respec-ilvamente;
: coeficientes de resistencia atractor al trabaiar con lasción nominal 1- mínima en elvamente;
1'.n,ín: coeficiente mínimo permitido detor (ge neralmente se toma 1rn,,nEI rendimiento de Ia transmisión
dos var-iantes de trabaio analizadas.Dividie:rdo la ecuación superior
cuenta que
¿t,r _' lt (z)
: órpr,

Teniendo en cuenta que el coef iciente-!: ll ::l't"1l,1iti t: :i'lenten0o en cutrrrtd qus vt '"""-''"i-que el coeficiente fz, esro¿rJuia f¡ es consider¿blemente,n'?I-o ^^--iáarqr;1,:Í;ü, : Ji.,o"
j " ?.*, üti a n t os c á I c u I ó s' con s i d e r a r
órr. = Y.*,n6t""'(401
siguiente:
de donde determinamos que la razón de la serie geométrica
q :'{ó'o- . (50)
ti
))J
rIr3
,1,
tl¡
En calidad de índices que caracterizan la serie elegida adop-tarnos: l) los valores de los coeficientes mínimos de carga' delmotor con diferentes marchas; 2) [os intervalos de las fuerzastangenciales de tracción del tractor correspondientes al trabajocon cada una de Ias marchas.
Para establecer los valores del primer indice analicemos cómose carga el motor en los puntos límites, o sea, en aquellos dondees posible pasar de una marcha a otra. Designemos la fue¡zatangencial de tracción del tractor en el punto de paso de la pri-mera a Ia segLrnda marcha con Pi*, y, en orden sucesivo, en lossiguientes puntos límites correspondientemente Pi'*, PiL' , etc.Para los puntos límites indicados podemos escribir las suguientesecu acion es:
En las ecuaciones dadas, MÁ^in, MÁ^in son los ',,alores míni-mos del par motor en los puntos límites respectivos. Los valoresmáximos del par motor en estos puntos se toma igual a la mag-nitud nominal Mn.
Dividiendo miembro por miembro las ecuaciones de la derechade cada renglón por las izquierdas, obtenemos:
Plc,r,
it, rIt,P',(s,,,
I t r:rlt.
- ^ill-
llt mmf nt
: M,h,nrni
M'^_rn
fuln
i,.2 M'l^,n i,r3
/tr, ' trfn /,r, '
\ ¡rr', Vn, , V nz -- -T;;: !" T;:Ti-:q'
las velocidades nominales 7n designan .tl 1úT:.'^o*.-t;ñ;;-; es-l, ,u'ón de la progresión geome'
Ya que en la serie geométrica
entonces, para todas las marchas
i, ^ it.¡ Ide malChaS -E :
-.'tr r tlrz q
el coeficiente mínimo de carga
del motor ym,,,ín: +:1 ti.n. igual valor, que deDende del
valor de la razón de la progresión.Para tener una representación evidente de cómo cambia el
par motor_M* en función de la fuerza tangencial de tracciór Ptg,desarrollada por el tractor trabajando con diferentes marchaé,confeccionamos un diagrama (fig. 37). La dependencia indrcadatiene carácter lineal y, por ello, el diagrama representa un hazde rayos que tienen su comienzo en el origen de coordenadas,donde la fuerza tangencial de tracciéri P¡r:0. De acuerdo conello, el diagrama se denomina polar.
Los índices a
de orden de lat ric a.
Nlultiplicando las relaciones dadas, y teniendo en cuenta que
: érp¡, obtenemos: 6uor: qz_tt
ul110

Para confeccionarlo, obramos c1e la siguiente
.¡.'a1';t;;;;J;;"á'i á'i'g'u'a trazamos' en 1a
¡trln , que se uti-
t3L .*ir.*o, ¿.eie de abscisas.Mn en el Punto
_ ,{fnl¡r¡rl¡¡P¡gt: \ '
El punto b'de intersección del rayo ltazado de la primera
marchá con la h"'i;;i;i";;;;;",-eS el 'pLtnto límite de paso a la
0 'L!
Fig. 37. Diagrama polar de la serie geométrica de marchas'
manera. Por el
escaia adoPtadr,Yn : VoQ : V.nQt, ... La serie escogida debe ser corregidade acuerdo.con las posibiiidades prácticas- ¿. "ruüoi-a"i"n'¡m.rode dientes de los engranajes.
El número de las ma¡chas de transporte y sus velocidadesnominales se designan en dependencia del tipo del t¡en de rodajey de la suspensión del tracto,r. En los tractores de oruga de tipoagrícola, en la mayoría de los casos, se limitan con una marchade transporte; en los tractores con ruedas de neumáiicos, éstasdeben ser por lo menos dos. Cuanto mejor es la suspensión deltractor y mejores las condiciones creadas para el trabajo deltractorista, tanto mayor puede ser la velocidad superior de trans-port e.
La velocidad de transporte intermedia 71. puede elegirse comoel valor medio geométrico o valor medio aritmético entre la velo-cidad de transporte máxima dada V*¿x y la velocidad superiorprincipal Vnk), o sea, debe hallarse en los limites
Ví,: lV;ñ"@ -.- 0,5 (7.5* t 7n r.r). (51)
En la actualidad, se llevan a caboI,rabajos experimentalespara crear para el tractor transmisiones sin escalones. Estastransmisiones permitiendo obtener en límites determinados cual-quier velocidad de movi¡niento del tractor, darían una elevacióndel coeficiente mínimo de carga del motor. En es,te caso el motorpodría trabajar siempre en un régimen próximo al nominal y,como resultado, el tractor ofrecería un rendimiento más elevado.La Lrtilización práctica de las ventajas indicadas de la transmi-sión sin escalones es posible a condición de ser equipada con Llnsistema de mando que asegure el cambio automdtico de la rela-ción de reducción de la transmisión de acuerdo con el cambio dela resistencia de tracción del conjunto tractor.
Al comparar 1os índices de tracción y económicos del tractorcon transmisiones sin escalones y escalonada es necesario, ade-más de lo expuesto, tener en cuenta también la posible diferenciadel valo¡ del rendimiento de los dos tipos de transmisiones.
La potencia requerida del motor del tractor se de,termina par-tiendo de los parámetros de tracción y velocidades del tractorestal¡lecidos en los cálculos anteriores. Además, hay que tener encuenta las particr-rlaridades del régimen de tracción del tractor,que se reduce al hecho de que las luerzas de resistencia al moui-ntiento del conjunto tractor tienen un cardcter inestable y duranteel trabajo oscilan ininterrumpidamente en 1ímites bastante consi-derables. Las oscilaciones de la carga se producen como resultadode la iniluencia del microrrelieve del campo, de la heterogeneidaddel suelo, de las particularidades del proceso tecnológico de laoperación agrícala que se realiza, de fa irregularidad-de 1a re-sistencia a la rodadura y de muchos otros factores.
El carácter oscilatorio de la carga acarrea 1a necesidad dereservar cierta parte de la potencia del motor para superar los
los pares motores nominal Mn y mínimo M'''ín:lizan para la serie geométrica 1:,-T'l:nnt'
Pot
i;;;etmentÁ tr,"'ios líneas rectas.paralelas al
El ravo de la prtmetu *uitt" cruza lá h:li'^:liit;, .;)i; rI¡..i.0'F1'1 se determina por la ecuacion:
I
(t('(((((({(((
Ia
e
Ir]
rfrfta
5 3¿¡r 5.{9 l13

titt¡U
IIII
picos de resistencia a la marcha que se originan sistemática'
mente.Cierta teserva de potencia puede.ser también necesaria para
asegurar Ia aceleració[";;i-;;":ün[o t"ttor' sin recurrir al cam-
bio de marchas.
indica do.La ootencia nominal requerida No CV del motor del tractor se
determina Por la fórmula:
*.- [Pn*irL9,"i"*Go)lrn, ##:ry, (52)¡r n _
ZSItrX.
El concepto contrario a la potencia específica es el peso es-pecífico del tractor Gr.p. iliza genetalmente paraóaracterizar la inversión tractor. Conto peso es-pecílíco del tractor kglC la relación de su pesoprogectado a la potencia or que éste tiene, o sea
c".:+' (54)
A medida que se perfecciona la estructura de los tractores; supeso específ ico se reduce más. En la actualidad,. los _pesos. especí'iicos de los tractores de ruedas se hallan aproximadamente a unnivel de 40-50 kg/CV, y los de oruga de 60-80 kg/CV; son unpoco más elevados los pesos específ icos en los tractores industria-ies. En perspectiva, debido a la tendencia de elevación de la do-tación dó enbrgia de los tractores, es de esperar la ulterior reduc-ción de sus pesos específicos.
§ 3. Confección de la característica teóricade tracción
Una vez establecidos los principales parámetros del tractores posible confeccionar su característica de tracción' para obteneruná r.presentación visual sobre los índices de tracción y de eco'nomía de conlbustible del tractor.
Las características de tracción se confeccionan en función dela fuerza de tracción en el gancho respecto al trabajo estable en
terreno horizontal. Estas demuestran como cambian, al variar la
e0Ig
lle
siendo P,
Vnt
ñ
It,
en el gancho, estiPuladadada sógún la nomencla'
ovimiento, corresPondiente
I'XTin;"urdura del tractor
traba jando con f u'erza nominal de tracción en el
sancho;: F;'ii;i.nto de la transmisión' correspondiente a su
segúLn la
red ro' ten-ien
en ' ccn las
tra tanto la
lla latcutada del motor de traclor al
neso del tractor se denomína potencia específica del tractor y se
'á*pi.iu en CV por tonelada' Su valor
N"sp: (53)
La potencia esPecilicaracteri2a la dotación depotencía esPecífica del't¡tente sus aelocidades de
I 14
im\ortante que ca-El aumento de la
:t corresP.ondiente'
5+ ll5

g¿lncho Pgr,n..conro origen de coordenadas cle la parte inferior clela característica tomemos el plnto o', dispuesto a'la izqLrierda delpunto O a una distancia igual, en la nlisrira escala, a lá ltterza p¡
D -
il-it"l'',¡
or el.eje de Ias abscisassponden
_ en Ir esca Ie cJe_La escala depende de Ia;para cada marcha ésta
r,: [0,5d. + (0,g _:_ 0,g5)á] mm,
k nt,
B
6
+
Z
0
cy
)a¿U
/4
I
(
(
(
(
300
8o/
o)
IUU
0
C,,rty'
,P N
Fig 38. característica tcórica de tracción dcl tr.rcior (según l.1s conclicioncs cj¡lejenrplo 2 del capiLulo l\r).
t6
60
It6
(((
(
(
(
(
(
(
(!
(
(
(
(
(
(
(
(
I
-J-
la llanta, en la que se asien ta
neumático, nlm.tiene en cuenta la deformación
los pares motor obramos de Iaempleanclo Ia ecuación drá;.,1
117

tl,
tt¡t0iIc0U
Sl
teU
üf
It(,
U
tltrllfl
l,tl
ilrlfrt
la que se.desplaza .el tractor, la relación de reducción í1, que 1ecorresponde y el .número de revoluciones ,?m, que desariblla en-tonces. el nrotor, la velocidad teórica de movimiento km/h puedeser determinada por la fórmula:
r/ 2nr rn^60 O,377rrn^
": l;J¡T-: --l;-'sien_do rr : radio teórÍco de las ruedas motrices, m.. . correspondientemente, la fórmula para deie¡mina¡ las vero-
cidades reales de movimiento / toma ei aspecto siguiente: -
(l - ó) 0,377r,n^
(55)
(55a)
(56)
lasde
fór-
(57)
tl _
n¡ -
P*unv looo Pu^nv,i gan: -7f-' T600
:-Z-rc .
§.:?'#ltá:' r a c u rv a ¿ " r:.1^^i1Tl:nl :. : n. lx,'*i L ñ,, : i H :i;
'.J':?1.:::.";ü"q":i:.1;'il^li{::*::,,1;:h::Y,f,?[ili;'i:?J;la gráiica se e.taDoraII' sEpdt quarr¡lr¡!e !-r¡'into del tractor. Ya querut"'¿á'lot- i e lo d dade s :' ol t l, d,t, *o!r"n,-.o.,i
o m on t e se rleben de-Iff f.l.,'.fi ,','.?1ÍÍ,!::i'i--".i:l\"';;lirt"::*?it:,'hÍ:.of l$.'las velocidactes reates v
,Oiirá, Vr]§i''r.'.ono.. la marcha conterminar las velocidi
Además, en la característica de tracción se trazan tambiéncLLraas de consumo especif ico de _ combustible por caballof,terza por hora. Su valor ggar,, gr/CV.h, se deterririna po, i,mula:
1030^ogan y'y'gun ,
siendo Gc: corlSümo de cómbustible horario, kg, corresDondienteal trabajo del tractor con la marc-ha dada'con unapotencia de tracción /y'goo.
estas fórmulas'
l18il9

Para determinar la magnitu d G", que entra en la ecuaciónscrita, proyectamos el punto que analizarlos /y'gan en la curva delrnsumo de combustible por hora, trazada pará la marcha dadan la mitad inferior de la gráfica. En la curva marcamos el valoruscado del consumo por hora.
Estos cálculos grafo-analíticos se realizan para una se¡ie deuntos dispuestos en las cun.as /y'gun. Por loi datos obtenidos,n la mitad superior de la grática se trazan las curvas de con-unro específico de combustible ggan par¿l diferentes marchas.
Los valores de los consumos específicos de combustible gga.lependen- del rendimiento económico del motor, clel grado dJ su:arga y del rendimiento de tracción del tractor. para ref lej ar con;r-riiciente plenitud la infiuencia de todos estos factor..,.. ne..-;a rio elaborar las curvas de los consumos específ icos con cadariarcha para una amplia gama de cargas de tracción. Se debe:ener en cuenta que el GOST 7052-51 para los métodos de en_sayos de tractores en el campo, elevar el rendi-miento económico del tractor, inf lu¡,e en losconsurnos específicos de cornbus ación de la po-tencia de tracción en los límites ra cada marcha.Las curvas gg^r. también deben abarcar las zonas de los esfrLerzosde tracción, dispuestas a la derecha de los puntos ffsan,o6,, p2rápode.r.juzg.a¡ sobre el rendimiento económico respecto al com-bustible del tractor durante las sobrecargas.
La caracteristica de tracción elabdrada debe ser analizadadesde el. punto de aista de la eualuación cle los ínclices obtenidos,el estudlo de la naturaleza de sus uariaciones en ftLnción cle lag otras condiciones de trabajo y'deL esclareci-
encia ejercída en ellos por dile-rentes factores.racterísticd de tracción del tractor es'posible,rminar el valor de su rendimiento de tiaccióniciones d,e tra bajo para las ca racterísticas pre_
fijadas del suelo. Para ello, tornámós en la característica unaserie de puntos y para cada uno de elros hallamos el i-alor delrendimiento de tracción, utilizando la_ correlación:
n,.u" -- 'uniun ,1t e
siendo y'y'g,n:potencia de tracción del tractor en el punto ele-gi do;
ly'": potencia efectivzt que en este caso desarrolla sumotor.
- E[ valor de ly'" se halla.proyectando el punto tomado /vga. €r)Ia curl'a de la potencia efbctiva que corr'esponde a Ia marchadada, dispLresta en la parte interioi de la gráfica; er punto obte-nido en esta cu¡va deiermina la potencia SLrscadá ,\',:
120
^.., EJ r.alor del rendimiento decu l-a do por vía a nala formá ;is;i;ri.'l"rrttca sesún
Ir.,":t)1,1'lgn¡:I1, (l - ó) -,[l:I¡. (l _ O)(f
§ 4. Dinámica de tracciónde los tractores con cuatro ruedas rnotrices
tracc.ión puede ser también cal-la lórmula (43), prescntada-en
I
I
(
(
I((((((
(
(
(
(
(
t
t
I
t
ttt3r3
'3
a
t2t

ferentes caminos, mientras que ambos ejes, esfando bloqueados,tienden a moverse con iguales velocidades de avance.
Consideremos el movimiento rectilíneo de un tractor con trans-misión bloqueada de los ejes motrices por un camino ho¡izontal,habiendo cierta diferencia entre las velocidades circunferencialesde las ruedas delanteras y traseras. La niuelación de las leloci-dades de aaance de ambos ejes motrices puede ser lograda única-mente al patínar sin auance o al resbalar las ruedas, ya que enel primer caso disminuye 1a velocidad de avance. del eje de larueda, mientras que el segundo la aumenta. La condición indicadade igualdad de las velocidades de avance de ambos ejes motricesse expresa con la ecuación:
ittttot
0ee(,
1)
e
Vi0-ó'):V'{(1 -6") (58)
(58a)Fig. 39. Esquema de accionantiento de dos
a -bloqueado;'-diferencia['
Aquí, como en adelante, el índice'se refiere al eje en el quela velocidad circunferencial teórica tr/1 es malor, y el índice" aleje en el que ésta es menor. Acordemos denominar las ruedas delprimer eje adelantadas, y las del segund La magni-tud 6 en la ecuación dada caracteriza el avance y elresbalamiento de las ruedas; en caso de entra en laecuación con signo más, y en caso de , con signomenos.
viDenominemos la relación -* coeficiente de discordancta ci-
vinentdtica de las ruedas motrices delanteras g traseras, y lo vamosa designar con la letra Éai.. En cada tractor dado el coeficiente dediscordancia cinemática tiene su de va-riar un tanto dependiendo de las
Entre el patinaje sin avance y lasretardadas existe cierta depende ecua-ción (58) se expresa con la correlación:
ó": I - #(1 - ó'): I - É¿¡.(t - 6').
La magnitud ó' en la expresión (5Ba) tiene valor positivo, yaque las ruedas adelantadas siempre funcionan con cierto patinajesin avance. En lo que se refiere a las ruedas ¡etardadas, en éstasel patinaje ó" puede tener valor negatioo, nu.lo, o positiuo. Si ó"tiene valor negativo, las ruedas retardadas marchan con resbala-
éstas ruedan sin resbalamiento ni patinaje; silas ruedas retardadas trabajan con patinaje,valor de éste en ellas es müo, qr. ét de laé
Los mejores índlces de tracción del tractor podrían ser obteni-dos siendo igr-rales Ias velocidades ci¡cunferenciales de las ruedasdelanteras y traseras, o sea,'a condición de que el coeficiente de
ejes motrices:
123

Fig. a0. Esquema de circulación de la potencia parásita'
la tuerza p'lr. Así pues, la po-e resbalan por la ieacción áelo cerrado; de las ruedas que res-a las ruedas motrices, y de estasItractor, de nuevo a Iis ruedas
te es inútil e incluso nociva ysif¿. Elia no sirve como fuentó
a la transmisión y crea en ésta
n aquellos casos, cuando, a con-trabajo, no es posible obtenerdel resbalamientb de las ruedas
compensar la discordancia cine-son más probables al moverse
jes en vacío, cuando el patinajees no es grande. En estas con_.do puente molriz no sólo no d.aua.
camlno ..ntayor que las traseras,sobre ellas actúan fuerzas cle tr.::,:J_radio de giro, tanto mayor es la potencia parásita que seongrna.
edas motrices se Lttiliza exten-
tiva Pin.parte de 1a luerza tangencial de tracción Pí* se transmite a
través del bastidor del tráctor a las ruedas retardadas y va a
t24
C
(((((((((((((((((a
IIIIa
0
Ia
a
t25

motriz delantero; cuanto más tarda éste en embragarse, tantomenor será su valor en el balance de tracción del tractor. General-
I
renciales simétricos por su estruc.tura son análogos a los de entreruedas: ellos transmiten los paresmotor a los ejes delantero ytrasero del tractor a través depares de engranajes' igualesdispuestos en forma simétrica. Losdiferenciales asimétricos distri-buyen el pa r motor que se lestransmite mediante engranajescon diferentes relaciones de trans-misión.
Examinemos cómo se distri-buyen los pares motor entre losejes del diferencial, en el ejemplode un diferencial cónico de tipoasimétrico, cuyo esquema senrrrestra en la fig. 42. El diferen-cial tiene satélites cónicos dobles ,l;a través del engranaje 2 ellos están unidos con el eje delanterodel diferencial, y a través del engranaje 3 con el eje trasero. Dela condición de equilibrio del bloque de satélites en relación consu eje, tenemos:
de donde
P¡r1: P2r2,
P,:,,Pt fz'
siendo Pt Y rt: respectivarnente el esf uer zo circula¡ y el radiodel círculo primitivo del satélite mayor, y Pzrz,del menor.
Los pares motor IvI'¿,¡ y ilI!í¡, que se transmiten correspon-dientemente por los ejes delantero y trasero del diferencial, se ex-presan con la ecuación:
tll'¿¡: Pr¡1r,
lvl'á,,: PrRt,
Fig. 42. Esqucma de un diferencialcónico asimétrico.
Fig.4l. Esquema de un embrague de rueda libre entre ejes'
ejes auto-1as ruedasIa Potenciadel Prrente
120
127

, Pt 11
uenta que i: ;, obtenemos:
M'!,, r, Rz- :-M'¡¡ 12 Rt
iendo Rr Y Rz:
Dividiendo la
iendo i¿ :La suma
, trasero delnite a 1a caja
ResolviendoIIOS:
mino.
4t,,,Nl'dit: ffi;
M'á¡--,VIa,,fr
(5e)
del a nterose trans-
(5ea)
(60)
radios de los círculos primitivos de Ios engra-
naies de ejes 2 Y 3.
"¿;l;ió" üf*i"i por la superior' y teniendo en
tracción en las ruedas del otro eje. En particular, cuando lasruedas de uno de los ejes se hallande adherencia con el camino y sr_r
disminuye, entonces esto provoca lagencial de tracción desarrollada pocluso teniendo éstas buena adherenctado, tiene lugar una reducción de la fuerza de tracción total deltractor. La dependencia de la fuerza de tracción de lafuerza de traccíón de las .ruedas que se hallan en s peo-res de adherencia con el suelo, es el defecto fu d.e tatr ansmis ió n d if er enc íal.
§ 5. Aceleración del conjunto tractor
La capa rrancar 1' acelerarse con rapidezeS una cua ante que adquiere cada vez- mássignificació idades :le movimiento, al aumen-tar la cant lampiiarse la utilización de lostractores en trabajo de transportc.
Al estudiarse los procesos de aceieración es más cómodo enluga.r. de..un conjunto tractor, analizar un modelo equivalente ensentido dinámico, en cuya composición deben entrar volantes quesustituya.n_ las diferentes masas giratorias y en movimiento'deavance del conjunto, los elementoÁ de fror"amiento, crLre imitan eltrabajo del embrague del tracto¡ y el resbalamiento rie sus ruedasmotrices, 1os eslabones elásticos, qLre caracterizan la compresibili_dad de las piezas de la transmisión, de las ruedas motrióes v delremolque.
Para conservar una semej anza dinámica entre el moclelo eqLri-valente que se analiza y el conjunto tractor real, es necesárioelegir. los-volantes de tal manera, que la energía cinética de cadauno de ellos sea igual a la energía cinéticalotal de las masasque sustltuyen. Estos principios de senrejanza también deben ob-servarse al elegir los elementos restantés del modelo dinámico.A las condiciones indicadas corresponde lo más plenamenteel modelo dinámico de cuat¡o masas de un conjunto tractor, dacloen la fig. 43, a.
El modelo consta:de cuatro volantes, de los cuales el l imita las masas girato-
rias y otras masas en mor¡imiento dei motor del tractor, eI2 laspiezas giratorias de la transmisión y los elemento-s motricesunidos a ellas, el S las masas en movimiento cle avance deltractor 1, las _piezas giratorias del tren Ce rodaje, que no estánunidas cine¡náticamente a la transmisión y, por
-fin, ^e1 volante 4
imita las masas en movimiento de a\rence y giratorias del remol-qLre;
de dos embragues de f ricción, de los cuales F I montado entrelos volantes I y 2 representa el embragLre del tractor, y el embra-
reláción de transmisión del diferencial'de ü. momentos transmitidos por -los ejes
iierencial es igual al par motor M¿¡, Que
del diierencial 4, o sea
Mát¡ * NI't¡¡: ¡1u"'
las ecuaciones (59) y (59a) en conjunto' obtene-
de los momentos entre los ej es-
c1e 1a relación de transmisión del
cuanclo rt: 12, y Rr : R2 (di-
'Én .t análisis anterior no -se tuvo. en ;ue,nt1 et ir9li.11e1t^i
ou."li.i'. iiis;;'i.;i,á'á!"áit.i.niiur., Entretanto, a ca!.rsa del
fiornmiento el cliferenc"iui' poié. cierta inse-nsibilidad V com]31^zal,li^[,ii]i,"''&'¿ii.*n.iui !oié. cierta, i":t."''lll!9uq^v-'^o:l:'i^'.^'r'";li',];'J' ;r* ¿r"." ., = .ñi- i. crea I a d i Ierenc ia t.^
".::i. :lP:]3,r1:l3,ii.';;i;",;;:* "r"'iátá;ü;i"
e¡tre li: tiY,i^' ..*|"1T:;ián.iof qre r. mue\-en unas respecto a,otras' Ilasta que tto octtrra
esto. la trattsmtsrcn";;i;;';;i['i ¿e tos eics motrices Iunciono
como bloqueada.,8";'i'lT ;;i¿" d if erenci al entre .[os e j es, motric:=^'^ t1=^, l::::l:
t " "
g'Já'. ilil. d ¿' t. ^
;¿ i ¿;' á !, á;9¡1 i g' : ^ t"": I l'" -"';li: -0,"J I I l" :'":fi ,-JJ:",',l' á.i j';sü ! ; :" :1,=l:* . ? " i' : : : -q I . *'i' :T
"X'
f l. :;L:i;¡'7i'.J,;i i;id;' ;; J' áfi;'énci al' L a va r i ació-n 1: t : I::::::rrerasrurl ErLqur!u!uq',{ É"-i'i i'eclas de uno de los ejes motrices
tangencial de traccir L:^ r^ r^ F,,-.-o ianooncial .e:1:Y:¿';''ii ;';ü;;di"t'" "'uio a' ta rLt"tza tangencial de
dCTgoqd
128I90

t
I
I
I
II
I
t
)
,
,
,,I
.,,,
¡1,
lrl, ,lt
t,'d
itl'
t!,
ta
t1ü
ttl
Iü
( r)l
\ rll
r ttl
¡ll
rllt9
\9
r9
Ét)e F2, montado entre los volantes 2. v 3 imita por el desliza-
nriento de sus .,.t Jilt'"t'? i;i;;i;; el iesbatamieñto del órganode conjunto tractor. La dirección de la acción de estos momentosse indica en el esquema con f lechas.
El momento de inercia /. de la primera masa, que imita [asmasas giratorias y las restantes en movimíento del motor, tienepara el conj unto dado un valor constante. Su componente prin-cipal es el momento de inercia del volante montado en el motor.
escribir la siguiente dependencia:
'r,i: G"on. o1
-" lrol|-r-- c '-T -T "---l-'
siendo Gcon:peso total del conjunto tractor;oc:v€locidad angular del árbol primario de la trans-
misión;u: velocidad del movimiento de avance del tractor;
I* y a*:momentos de inercia y velocidades angulares res-pectivamente de las distintas masas giratorias delconjunto comenzando por la parte conducida delembrague;
g: aceleración de la caída libre.De la igualdad expuesta tenemos:
l:+(+)"*xI,(#I (61)
Cuanto mayor es la velocidad de avance u y las velocidades an-gulares or" de diferentes masas giratorias del conjunto tractor o,en otras palabras, cuanto más elevado es el número de la marchacon la que f unciona el tractor, tanto mayor debe ser, con unvalor o. prefijado de la velocidad angular del árbol primario Cela transmisión, el momento de inercia 1. de la masa equivalente.
La fig.44 nos ofrece el diagrama teórico de la aceleración delconjr-rnto tractor. En la mitad superior del diagrama están traza-das las curvas que muestran, cómo cambia en el proceso de acele-ración, con el transcurso del tiempo l, el par motor M^ y el mo-mento de frotamiento del embrague de fricción Msm¡; en la mitadinf erior del diagrama están trazadas las curvas de las velocidadesangulares r¡^ del cigüeñal del motor y orc del árbol primario dela transmisión, correspondientes a los momentos citados. El mo-mento de resistencia Mr"¡, aplicado al árbol primario de la trans-misión, convencionalmente se toma constante por todo el trans-curso de la aceleración y se representa en el diagrama con Lrnarecta paralela al eje de las abscisas. Como se muestra con fle-chas en el eje de las ordcnadas del diagrama, los momentos se
Ft \ 2 [! 3 t ;;;i;rA; en la tigura 43, b; los
tes unidos.'-- Piáatmente, la ulterior sim-
of if icáci¿n del modelo diná'Ini.o pr.¿. ser logra,da' ii ,n-o
3L-) .. "t"i"[.-éá iuenta" el resbala'
- rni""io de los órganos motrices
ü.i'iiá"io.; entoñces, el se.qun'
áó' .*¡.ugue de f ricción F2 se
;;.lrt¿ Y"en lugar. de los^tres. volantes indePendlenles ''..u
Fie. 43. Modelos dinámicos equivalen- v ¿, q'uá táni'i'ot en e-l modelo
tes a la aceteracro¡r de un bonjunto á. tultro masas, nos limitamoS
l,Jr)l3l

de aceLeración en dos Periodos.lapso necesario Para niuelar lasat del mr¡tor Y el drbol PrimarioericCo de aceleración comPrende
el tíempo necesarto ¡:ara el ultertor au.mento de la aeloctdad de
marcha del cott.itLnto hasta el ualor estcbLecido'Examinemos en el diagrama como transcur¡e el primer período
¿. fu u..i.ración. Al arñncar el tractorista conecta suavemente
Írazan deide eje de las abscisas hacia arriba, y las velocidades
el embrague, aumentandode esta manera de modooaulatino el momento dcirotamiento que éste de-sarrolla. En el diagramase adopta que el crecimien-to del momento de frota-miento transcurre Por unalev Iineal, que el Procesode conexión- completa delembrague ocupa Ltn Pe-rÍodo de tiempo /. Y quedespués de conectarse elembrague, su momentode f rotamiento tiene elvalor constante calcu-lado ,&lem¡cal : pr'Vf". Du-r.ante el primer periodo deacelerac[ón el momentode frotarniento deI embra-gue es para el cigüeñalmomeuto de resistencia,
Fig.44. Diagrama teórico cle aceleración de- rrn con.junto tractor.
§
\ü
y. para el árbol primario c1e la transmisión, el momento de impul's10n.
El regulaclor del motor, reacc la ve-
locidad ángular del cigüeñal al , frota'
miento dellmbrague, aumenta I tible a
los cilindros y, cimo resLtltado, nte el
Dar motor l\.f-. Ya que para srtp,erar el nlomento de frotatnientoáel embrague se utiliza' también c[ momento dc las fuerzastangencialós de inercia de las masas en movimiento del mo-
tor,"el crecimiento del par motor, creado por la energia. de lacombustión, se retrasa un tanto respecto al crecimiento, del mo-
mento de frotamiento del ernbrague y transcurre por 1a recta in-clinada OB.
Después de que el parfuncionamiento del motorcaracterística.
132
motor alcanza el valor nominal M,,,pasa a [a rama sin regulación de
ella
En el d ia grama esta rama está representa cla por la recta BC,iación del par motor durante el
transcu¡re según una leyla diferencia entre los mo-
mente, como se mlrestra en eliente.
I cigüeña! del motor, durante eldisminuyu. de modo gradual, yaLto de frotamiento dei embragie
su.pera el par motor y, por ello, puede ser vencido únicamente atntil,izarse la energía cinética de ras masas en movimiento delrnotor. La variación de ra verocidad angurar der ;igü;;ar estámostrada_en el diagrama con la curva úrm.
, A medida.que aLrmenta la verocidad angular del árbor primariode la transmisión y d.isminuye- l¿ verocidM angular der ciguenardel motor, la diieréncia entrá ras verocida¿..-ln-¿i"u¿;'.;'reducey en .el punto á del diagramaresbalamiento del embra§ue y tleración. Su finalización ie cárateóricamente instantánea del oarde la transmisión. Al cesar Llmienza la rotación acelerada delárbol primario de la transmisión y, como consecuencia, el mo-
s de inercia de las masas en mo-o.de acele¡ación, al cigüeñal del
transmisión se les iomunican, el '¡alcr de Ias cnales depende
L a va ri a c ión d e r a s ve r oci cr a de,' oT?Ti'^lf,' fJ'lffil3]' 1X'* ;.'Jli';representada en el di.agrama con Ia iurl.a ú)¡¡: ro.. En el segundoperíodo de aceleración-er embragLle no r.iuur, v"rr rá,,,*to a.frotamiento no se utiliza en su [otaridad; toi fu'...-.áiá."qr. ,.transmiten a través del embrague son 'iguaiei
u lá"-Jii.r.n.iuM*- I^!i*, siendo 2F ,^ aceleración angular del cigüeñal.
(((
((I((
\(lqr(r(r(r(r(l(i(i
133

la eler vatíma [o
ales realizadas del Proceso de
iirmaron, en general' Ios con-
de la naturaleza de su trans'
de inercia /" Y el momento de
ignifióantes,- el Pr.imer Período{Ún antes de aiabarse el Pro'stas condiciones se crean' Portractor sin remolque' Por buen
es ciinánlicas del conjunto trac'mos:ración del conjunto inmóvil sin
ar del cigüeñal al finalizar el
,f.- S'"valor Puede determi'
'' f' LI"^o - M^ n, (62).,l,r :.ox - \ ",':
ox - I ttfi'''
ó0
siendo ox:velocidad angularen el momento inic
f34
En el sector de conexión del embrague, o sea, en el Iapso0- ts, el momento de frotamiento del emb"rague
M"n',5: Mu.n¡. "ut* :FM^ ! ,
'g " tg'
siendo / : valor corriente del tiempo; 0 : coef icientedad del embrague.
. Adop,tamos que después de acoplar el embrague yminar el primer período de aceleráción, o ser, Jn eitiempo ts- tt, su momento de frotamiento consérva untante
de seguri-
hasta ter-período devalor cons-
Memb.cat :FMn.
:l* ,',t*- :r*Bh:+-'Teniendo en cuenta lo expuesto, representemos la ecuación
(62) en la sigLriente forma:
o'* :'* -
de donde despuésllamos:
's
5
0
de
(0r,"; - u,) at
Im
las transformaciones correspondientes ha-
t
5
,'-: r, - +[r,u - r) l, - Efl ,_] g2a)
Para hallar la durac.ión. t¡ del primer períocro de aceleración,haremos uso de la condición de qLre al iinarizar este período, Iávelocidad angular del cigüeñal o'* es igual a la velocidid angu-
rll
ilr
rlr9
{9
135

Iar oique elcurri dornos:
tlel árbol primario de Ia transmisión' Teniendo en cuenta
¿rbol orimrrio de la transmisión comicnza a glrar trans-
i#i"'ii;'i;pli r" i.;pré,',ü¿"i;i;i^ii. l, aceleráción, tene'
,r: irr.:,!
de la integración Y las transiorma ciones
de donde
¡¡/ : (65)
E[ valor de la velocidad angular {,]', calculado de este modo,se debe comparar con su valor mínimo permitido para jLtzgaracerca de la posibilidad de arranque con la marcha dada.
Según datos del académico V. Boltinski, en la caracter[stícaínstantanea del motor, registrada durante la aceleración, el parmotor máximo se obtiene con menor frecuencia de rotación queen la característica estacionaria, registrada cou cargas estables.De acuerdo con esto, V. Boltinski considera posible adrnitir Iareducción de la frecuencia de rotación del árbol del motor durantela aceleración hasta un valor
n|: no- (200 -i 300),
siendo /?o : Irecuencia de rotación correspondiente al par motormáximo en la característica estacionaria, r.p.m.
Determinaremos ahora la duración del segundo período deaceleración /2. Designemos la acele¡ación angLrlar total del ci-giieñal del motor y del árbol primario de la transmisión después
de terminarse el ¡esbalamiento del embiague ,on ff. Esta se
Ll -
Tfr
7;'* + h[,u'- r) +f io'-r:.)(61)
(p- r) +f {o-v*)
De esta ecuación se desprende que en la duración del primerperíodo de aceleración 11, a la par con los parámetros estructura-les del motor y del tractor, Llna considerable influencia ejercenlos factores de explotación: el grado de carga del motor, la mar-cha con 1a que se realiza el trabajo, el valor del momento deinercia del conjunto tractor y la calidad de manejo (tiempo em-pleado para acoplar el embrague).
En los cálculos aproximados es posible adoptar en las fórmu'las presentadas más arriba tr x 1,5 s.
Teniendo el valor /r de Ia duración cleI primer período de ace'leración, e introduciendo en 1a fórmuia (62a), es posible deter-minar el valor de la velocidad angular .'*:r' al final de este
período. Después de la sustitución indicada y las transiormacionescorrespondientes, 1a fórmula (62a) toma el aspecto siguiente:
M^ t-,*+r;.-fr(P- l)(l -1'*)
expresa con la ecuaclon:
pilt^+: y*rfn,
Expresemos el
M¡s¿ Qüe entra en
y lo designaremos:
momento reducido de
esta ecuación mediante
Mr.d: Y*Mn'
.Imtr: ts-?_'
(oar^_' -
dt. (63)
resistencia del conjunto'ii pu, motor calculado
Teniendo, a continuación' e-n cLtenta
,-.ntái -¿.
frotamiento del embragtle 'en
ái;;;;; de aceleración' transiormamos
forma siguiente:
de doncie
tú
,túlc: llrn
l-.s R
de clonde, clesPr-rés
sarias, tenemos:
(((
(
n,,"") ''t,
+5Ic
^I^,L: Zi I(p'- v;) ru
nece-
(63a)
según Iac,r', obtene'
((
1l1r(rtrtrl(¡"1CI
IgLralando el
ecuación (62a) Y
mos:
valor obtenido de ro'" a1 valor de orf.
designando su valo¡ resultante con
¡¡':1¡, - +[, t¡t - Br-1 11) ti - - B, /*l:
136
137

origina por el excesoy puede ser calculada
de donde
de la diferencia de los momentos M* - Mr"d
por la fórmula:
da Mm- lvlred-T: -InTr; '
t J-lfl¡ - ;¡'^ ' ;'¡c da.
/Yl- -./i1r"¿
undo período de aceleración:
i!ft;a,,'
La duración total de la aceleración
tas: t1 ! t2. (67)
A medida de que se elevan las velocidades de movimiento la
ción del conjunto tractor con la marcha dada, puede resultar ne-cesario tener cierta reserva de potencia, o sea, reducir el coefi-ciente Lex de su carga de explotación.
La aceleración y las maniobras con el cambio de marchas pue-den ser facilitadas utilizando transmisiones que permiten cambiarla marcha durante el moaimiento sin interrumpir la transmísiónde potencla a los órganos motrices. En este caso la aceleracióndel conjunto tractor puede realizarse por etapas, o sea, por latransición sucesiva desde las marchas inleriores a las superiores,casi sin pérdidas cle la energía cinética que se acumula en esteca so.
La aceleración por etapas, en límites restringidos, puede serrealizada, en particular, al disp«-rner de lcs así llamados amplif i-cadores del par motor, montados en una serie de tractores entreel embrague y la caja de cambio de marchas. En este caso cltractor comienza a arrancar, cuando el amplificador estd embra-gado y cumple la función de reductor de velocidad; después definalizar la primera etapa de aceleración el amplificador paula-tinamente, sin interrumpir la transmisión de potencia, se desetn-braga y, por fin, se convierte en un acoplamiento que une elárbol del embrague con el árbol prirnario de la caja de cambiosde marcha. La relación de transmisión total en este caso se reduce,y la aceleración finaliza con la ulterior rotación acelerada de tresárboles unidos entre sí: el cigüeñal del motor, el árbol del em-brague y el árbol primario de la caja de cambio de marchas.
Al emplear transmisiones en las que todas las marchas secambian durante el movimiento (sobre éstas con detalle tratare-mos más abajo, en el capítulo XII), el principio'de aceleraciónpor etapas puede ser utilizado más ampliamente.
§ 6, Registro de la característica experimentalde tracción
Los datos que más se aproximan a los reales, de Ias cualidadesde tracción y de economía de combustible del tractor, pueden serobtenidos por vía de ensayos de tracción en el campo. Los ensayosde tracción suelen denominarse dinamometría del tractor, ya quedurante estos ensayos uno de los elementos principales e;'la me-
,I
,I,)
t
La duración buscada
.2-
del seg
d,:tto'
lr
I0
ú
ion
ú)n
fr: it¡'fi*;a'+ (66)
t¡tI
138139

----
dición, cón un clinamógralo de los esluerzos de tracción que.se
áeioiinttrn en el gancño clel tractor. Según. lcs,restrltados de.losensayos se trazan- [as características expe rttnental.es de traccion.- -c'on
el fin de obtener todos los datos necesarios para trazatla característica de tracción, cuando se realizan los ensayos se
-i¿* ias iiguientes magniiudes: l) esfuerzo de tracción en el
gr"óii"; ll iBio.iauá de ñrovimiento'(recorrido y tiempo-);,3) nú'ñrero de róioluciones de 1as ruedas motrices; 4) consumo de com-
bust i bl e.--"pói-tot ¡esultarlos de las mediciones se calculan los índices
r.rtuni.r, que-deben ser t¡azados en la característica: eI resbala'
;i;;i; áá l'or órganos motrices, la potencia de tracción del tractor,el consnmo de combustible horario y especíiico'- -Ánt.r
de los ensayos de tracción ée r ealizan las prue.bas del
motor del tractor.n rn luboratorio con el propósito de verificar la
i,áiiéiña.ncia de sn característica con ios-parámetros establc-
c i dos.- -en el proceso cle los ensayos.d.e tracción se observa el régimen
de funcioñamiento y el estado del motor, se registran 1a [recu.en-
.iu ¿. rotación del'cigüena1, la temperatura del agua en el radia'clor v la del aceite en el cárter."--Las
mediciones dinamométricas de 10s tractores se realizan,enprimerlngar,srstrojeradecerealesy en campo prePa recomienda efectuario, .nroyó, .ón iu , características para
iu- ,ono dacla; se s llsa)'os en suelos con
ñrrn.¿u¿ normal. Con el fin de ás completas las ca-
iáilerísticas de tracción en difer ones del terreno, fre-
cuentemente se registran tarnbién las caracteristicas en suelos
óámpáctos, baldíosb compos clespLrés de cosechar hierbas vivaces.
Ád.ilat, iós tractores de'ruedas' suiren mediciones dinamoméiri-.ui po. caminos, para obtener datos acerca de sus cLrallclades Ce
tracóión en trabajos de transporte.---Lo, tractores'de tipos eipeciales se cnsayan en tales condi-
ciones- del sueto para lbs que está desti'ada s, -erplotac.ión.- for sectores para Ias ^medir iones dinamométricas deben ser
horirontat.s, co1l microrrelieve uniforme. Las tampas en. la parte
media del sóctor, donde se efectúan las mediciones, no deben ser
ma]'ores del 0,5%.-Én los sectores erperimentales se determina Ia humedad y 1a
dLrreza clel suelo. Lai pruebas para determinar la htlmeda¿ se
iotrn en dos o tres puñtos, a una proftrnclidad de 5, [0 5' 15 cm
ál ii6u punto. Se iecomiendan róalizar las mediciones de laáur.ru dei sLrelo con Lrn meclidor de dureza (densi'olúm-etro) 91IófiS pi,nto., dispuestos r-rnif ormemente. por la superf icie del
ié.tor eiperimental. Al confeccionar los di.agramas se determinat, At t.r, en tres capas del sLtelo, clispLiestas a yla proIundidada. [-á,S-10 y l0-'15 cm. En 1a caratterística del sector experi-
140
mental también se registran otros índices que iniluven en lascualidades físico-mecánicas del sueLo.La d,ureza p, kgflcm2, del suelo se calcula por la fórmula:
^_ hgv- f ,
siendo á: ordenada media del cliagrama, registrada por el den-sivolúmetro, cm;4: escala del resorte del densivolúmetro, l<gt/cm;I: superf icie de la sección transversal áe ia báéLrilla clelr'ástago del densivolúmetro, cm2. - - -r-"'
La humedad del sLrelo ru se determina como la relación
t: T too96,
siendo qr: peso de la muestra del suelc húmedo,- Qz:su peso después de secarla.Los sectores para las medicíones cdinamométricas de los trac-tores deben tener nna longitud de 600 m; de ellos, para- tas-mecli-
:i:l^.. ¡.:_i-erva,la^qarte-media cte 200 i" a. rongiir¿l u-io. ,.._l?:::""i1::..,q?._, d. pbo.pm cada, uno, 19. J.¡ál irir"rár'"op.ru.ciones auxiliares: elección y estabilizacidururrcs auxlrrafes: erecclon y estabilización de la carga de
-trac-ción, reglaje_de los aparatoi de mecricíón, registro cleTus-'indica-Lrurr, rtrBrdJc ue lus aparalos oe medlclon, registro de stts indica-ciones, etc. En casos justliicados se permite"reducii-tás"secto.esextremos hasta 100 m óada uno.
((,(
((
(i(
i(
(
r(
r(
,I
r(
'(i,l
ttrl
trf
if,3
. L.a p.ar_te media del sector se cienomin a parcela d,e control y sttlongitud, besana de control.Fl registro de las características c.le tracción consiste en l¿rrealización de una serie de ens
gancho del tracto¡. Las caracteen último caso, en las marchascon cada marcha se realizan l0
ón, es. más racional cargar eliales ae Irenado, o como "se
los
cuencia estos carros se crean b^:;;K'L;"i;, f,l.,'l,Jl "Tir.iiut.,:fi:en el .cual en lugar del motor está monta¿o iin ii.no-J.",.,no ,otro tipo: rnecánico, hidráulico o eléctiico. El carro se-'r"ilolc,
l4l

do entre el tractor Y el carro'
Tambiénpuedenemplearseencalidaddedispositivos,decargatru.iáiá.'l'ui,tonrovii.Á'dieset comunes, utilizanilo el motor diesel
.ffi;'jj*;;;;:'Ei';;ñ-á' la resisiencia de carga se regula
1¡
,I
I)
,ttIIIIIt
9
b
II9
ItIIII{t)
Fig.45.Esquemadeprincipiodeundinamógrafohidráulicodetracción.
variando la cantidad de combustible que se alimenta a los cilin'á;;; A;i motor y .*nirñáo el ¡úmerb dt: la marcha del tractor
de carga.-- prü-lrs mediciones realizadas durante los ensayos. de trac-
ción del tractor, se-nácesita el :orrespondiente juego de instru-
mentos de medición.^""^i;; I'rrá'i"' de tracción '" ;' fi"'.13*1Í,J'1'.t"ir::,I't:,:del mecanismo registrador, que
os de tracción en una cinta en
obtiene en la cinta se denominaactores genelalmente se emPleanicos.
s han daCo buenos resulta-n el escluema en la iig' 45'se cornPone de un cilindrocuales éstá lleno de aceite'
Pn"n el aceite se comPrinleori 2. EL pistón del manó-do en un resorte' Bajando,desplaza el cuadro junto
142IIII
Pga¡: kaFi¡'
I/ -
3,6s/"n
143

contddores de impulsos eléctricos. Los contadores se conectan alcircuito eléctrico, el cual por cada vuelta de la rueda, l'arias veces,per cada vez que se conecta,se se registra por el con-tad rtes de vuelta del árbolreg de los índices de resba-lamiento obtenidos.
En la fig..a6 se mnestra uno de los esquemas para crear im-pulsos eléctricos. En la rueda se fija el disco / de material ais-lante, en el que uniformemente están dispuestas las placas con-ductoras de'corriente 2. Frente al disco en rotación / se lija in-móvil el segundo dlsco 3, también de material aislante. Este tienedos contactbs conductores de corriente conectados con cables al
a7 |A-A
Fig.46. Esquema de o[¡tención de impulsos eléctricos al girar la rueda
mbustible en el depósito. En lapara colocar el termómetro. En
ado el grifo de tres pasos 5, queito de combLrstible del tractor, y
suministran el combustible al
Fig. 47 . Depósito pa rabustible de conlrol'de
l,egistrando la posición de la'flecirá en laescalagonlfgl antes y después del ensayo, hallanrcs elbustible consumido ciurante el ensa-vo en gramos:
do r.
del depósito depeso del com-
(i(
((((
(
(
(
(
I(
(
(
ttttt3
t3
{
circuito eléctrico, al cual está unicla la batería de acumuladores 4
1'el contador 5. Cuando las placas del disco en movimiento cie-rran el circuito, al devanado clel imán del contador se transmiteun impulso de corriente de corta duración, que mediante e1 meca-nismo registrador se marca en la esfera del contador. De estemodo, en la esfera se registra cada parte de vuelta de la rueda,correspondiente a la distancia entre dos placas contiguas 2. Paraevitar los errores, que pueden surgir al ser desiguales las velo-cidades angulares de rotación de las ruedas derecha e izquierda,Ias revoiuciones en cada una de ellas se miden por separado,y como valor meclio de las revoiuciones se adopta la semisumade ambas mediciones.
EI consumo de combustible en los ensayos de tracción se de-termina generalmente mediante depósitos de control de llotador.El esouema de tal depósito se cla en la fig. 47. EI depósito constade un recipiente tubular 1, del flotador de lalón 2, dispuestoclentro de éste, de la varilla 3, soldada al flotador, con una agujaen eI extremo superior y de la regla graduada exterior 4. Despla-zándose junto con el flotador, la aguja se desliza por la escala de
144
G"n : f ,r'n¡: [v,o-a(t-20)),siend o : distancia a Ia que desciende el Ilotador durante el
ensaYo, mm;n¿: valoi de la crivisión en ra escala de medición. esta-
blecido por rncdio del caribracro previo crel clepósitode control, cm3/mm;
T: densidad del combustible a Ltna iemperatura l, me-dida en^el depósito ciurante ei ensayo.'
l,: l':u - qU - 20), siendo 1,20 Ia densidaá del combustible
a Lrna temperatura de f 20. C, 1, a la corrección detemperatura rnedia de ra densic.rátl que se determinapor tablas inlormat;vas.
El consumo horario de ccmbustible G,,, ltg/h, y el consumo es-prcÍiicc-' de combLrstible sg,rn, gricvh, p.r,,n".rbállo de fiieiza ¡eIr¿r -:ióu, sc deicrrnina prti lzis iórmulas:
§ 3ari 5.1!
c": a,o ff; ggon : lo, #145

)I)
Durante los ensayos, todos los aparatos de medición obede-ll comlenzo de la besana de con'ésta. A cada ensaYo se le asignase escribe el índice, que indicanúmeros de los ensayos se re'
cción v se anotan en la libretavas ináicaciones de los aParatos'racterizan las condiciones de loslibreta.ltados de los ensayos' se confec-
del tractor Probado's de invéstigación científica'más Perlectos, r-ttilizan el así
llamado método de ensaYos ace-
lerados de tracción del tractor.Según este método los en'
savos-para el registro de la ca-raóteríitica se realizan ininte-
Fis. 48. Esquema de un registrador
"t¿ltrióo dei núnrero de revoluciones
del árbol.
namógrafo de tracción'- An"alicemos, en calidad de ej
146
conectado el condensador C.
de revoluciones de Ia rueda caracteriza la longitud del caminorecorri do.
Como transmisores de impulsos en los registradores de tiemposirven discos de contacto montados en el árbol de un mecanismode reloj. Durante el funcionamiento del mecanismo éstos, des'pués dé determinados intervalos de tiempo, cierran el circuiloéléctrico del registrador y como resultado, periódicamente se
originan impülsos de corriente, que se registran en la cinta deldinamógra[o.
En lt registrador de consumo de combustible como transnriscrde impulsos sirve una escala con contactos eléctricos, Pol la cualse desliza el indicador uniclo al flotador del recipiente del depó-
6. 117

siendo m" y mi: cantidades totales de intervalos entre las mar-
o:lr -+.\ ,?.
El método de ensayos acererados de tracción es aceptabreprincipalmente para tractores corl motoies ;ü=;l; ;* plri.n unrégimen térmico estable.
l1-),oo*.ntr
"/
Los dirranrógra[os eléctricosal rcalizar ensayos de tracción Ceernplean dinamógraios e[éctricos,r.n los cuales la conversión cle lasma gnitudes orma-ción del ele a) eneléctricas se da clecaptadores I resis-tencia óhnttca de alamb¡e o clehoja nretálica.
.Estandc pegados en la pieza,a la que está aplicacla la fuerza
se utilizan predominantemenieinvesiigación. Generalntente se
Fig ó0. Esquema de un captadorde h ilo.
C
(((((((((((C
C
((t
(,(
C
cC
(oG
13
ig. 49. illodelo de un diagrama de tracción obtenido duraniedos.
ensayos acele¡a-
A causa de que la longitud cle las besanas cle control duranters ensa)'os-de tracción puece ser desigual, surge la necesida cl clerecisar la fórmula utilizada para cietein'rinar el"valcr clel patina¡ee las ruedas mctrices.
6:1-':l --St"l'
. St'tt -r-Sr*b'It""r, ' 2t,rrr^6 . l.rr*- E*^,.,*
. -Expre.semos. lr:s magnil,des que entran en la ecuació' obte-ida mediante las marcas registráclas en ei cliagrama cle tracción.eniendo en cuen',a ilue
que se mide, los captaclores de alambre se clelorman junto con lapteza y reaccionan al valor del esfuerzo que motiva
-la cleformr-
ción, cor-r el correspondiente cambio cre la résistencia a la corrientequ.e pasa a trar'és de ellos. Los captadoi-es se conectan al puenter:léctrico de medición, que se pone en equilibrio antes Jc.oÁ.nruIos ensayos. Al variar Ia resiste ia óirmica inicial clel captador
cnte y, como resnltaJo, en suuna corriente, cuya intensidad
iLte se miCe. Iledianie nn osciló_sidad de la corriente en la dia-
una cinla; el registro obtenido
(fig.50) lo más Irecuente es el
una eIer ada resisti'idad Los .rloiro-Ll"¿S'r,:iX§'3i.-,X1[rtJ'::elabor¿n ce hoja de constantán clc s0-r0 p oe'esocsár.
-i, .u-
racterístjca principa I del captador es cl cctirciente cL'e se¡tsii¡Licladletisorictl Sc.,n, QLle mucstra-la depenciirncia enire Ia deio¡.macióndel captacloi I'el canrbio de su resistenci¿r óh¡rica. El coeficientede sensibilidad tensorial se exprcsa del irr.rclo siguienter
--
c AR: R LRIRJc¡p: A/J : "
,
Strol, ffi,\¡Suo" mi r
4trab _
tl, u"
ffi,
fr,
l§§q'
{8149

),¡
0
)f)
¡r),,i)
rlettdo AR/R : variación relativa de la resistencia óhmica delcaptador;
e:Llll: deformación'lineal relativa del hilo del captador.
Teniendo en cuenta que de acuerdo ccn la ley de Hook e:+,;lendo o la tensión normal en el hilo, y E su módulo de elastici-dad, tenemos:
^ARJcap : -T-
Si tomamos para el acero de muelles E:2. 106 kgf/cm2, latcnsión normal máxima permitida omáx :. l0 000 kgf/cm2, y elcoeiiciente de sensibilidad tensorial del captador Scap: 2, el-tonces obtendremos que 1a magnitud máxima de la variación re'lativa de la resistencia óhmica del captador
fAR) _S""po*áx _2'lo4\R,/máx E z'tru:l%'
En vista de la pequeñez de los valores *, ., registro directo
de las unidades que se miden es imposible sin una previa ampli-ficación. Por esta razón, a la diagonal de medición del puenteeléctrico hay que conectar ampliiicadores electrónicos de uno uotro tipo, para amplificar 1a señal que se transmite al oscilógrafo.La utilización de amplificadores complica los aparatos de medi-ción y dificulta su empleo en el campo,
En la actualidad hay una sei'ie de dinamógrafos eléctricos detracción que funcionan sin amplificadores. E1 principio de suestructura se basa en que el aumento del número de captadorestensoriales en el esquema del pueqte eléctrico eleva la sensibilidadde 1as mediciones. En particular, conectando captadores de re-gistro en los cuatro brazos del puente eléctrico, la sensibilidad delaparato anmenta cuatro veces, en comparación con el esquema depuente con un captador de registro.
En la fig.5l está representado el esquema de un dinamógrafoeléctrico de tracción, que iunciona sin amplificador. El elementode fuerza l del dinamógrafo tiene la forma de un aro, el cualdurante los ensayos del tractor se estira con el esfuerzo Pgrr,. Enla superficie inferior del aro están pegados ocho captadores, losque crean, como se da abajo en el esquerna eléctrico del dinamó-grafo, cuatro brazos del puente de medición, en cada uno de loscuales entran dos captadores de registro conectados en paralelo.Los captadores Rn están dispr-restos en la zona de extensión clelaro y los captadores Rr,, en la z.ona de compresión. La alimenta-ción del puente se efectúa mediante una batería de acumuladoresy se conecta con el interruptor Bz; la tensión que se transmite alpuente de medición se regula con la resistencía (3. A 1a diagonalde medición del puente está conectado el galvanómetro G (buclede oscilógraio). Para equilibrar el puente sirven las resístencias
150
E
'I,9
ü0,9
"5
'9
úrQ
5
Rr y Rz. A uno du 1?: bfrÍg. del .puente puede ser conectada pa-
lalelamente, mediante er interrupü, p,, i^ ,eriiiercir'-á.'escaraR"., l3 cual permite controla. la uicrtá cle registro y trazar Iasmarcas de escala en los oscirograma, ¿ir..tá'r".ni.'arilnt. ro,ensayos.
Fig.5l. Esquema de un dinamógraio elóctrico de tracción.
del oscilógrafo los valores directos de la potencia de tracción
fijado un espejo de t mm2 de área aproximadamente. El haz delLrz, clrya fuente es la lámpara /, pasando por un sistema de le¡l-les se reileja en el espejo y s3 transmite a Ia película fotosen-sible 2. La posición del punto luminoso en la película dcpende dela drsposición del espelo. A su vez, la posición del espejo depenCede la intensidad de la corriente que pasa por el bucle de alambredel galvanómetro, )'a que su variación origina la correspondientedesviaclón del alambre en el campo magnético y, como resultado,e1 espejo gira a Lrn ángulo proporcional a la intensidad de la
se transmite a la lente dispuesta delante del mecanismo de arrastrede la pelicula y se enfoca en el diagrama en iorma dc una iíneaIina transversal. Desplazando uno de lo; discos en rotación res-pecto al otro, puede variarse la frecuencia cle las *rr.or., I-u. l.entes dispuestas en di'ersas pa'tes del oscilógrafo estándesigna das en el esquema con la letra L.
Vtn/t
t0
$o's/c*d
¿00
J00
200
((((((((((
((
((((
((
(
(
(
(
((
(t
G.
ryii
/,t
Fig.52, EsqLtema óptico de un oscilógraIo magneloeléctrico
coiriente, o sea, a Lrn ángulo proporcional a Ia de[ormación delcaptador. De esta manera, el haz de luz se despiaza por el planoperpendicLrlar al dibujo y registra en la película la cLrva querepresenta el transcurso del parámetro qLte se mide.
Al mismo tiempo, parte del haz de 1uz clue va del galvanó-rnetro se corta con el espejo 4 y se transmite a un tambor girato-rio polifacético de espejo 5. Reflejándose en las facetas del tamborel haz se transmite a Ia pantalla cilíndrica mate 6 y refleja enésta la imagen.de la curva qLre se estudia. La curva se ve en elespejo 7 y puede ser observada por el vidrio protector B.
El oscilógrafo está dotado cle un registrador de tiempo. El ele-mento principal del registrador es un motor eléctrico con frecuen-cia de rotación estabilizada. El motor hace girar dos discos 9con ranuras. Bajo Ios discos está dispuesto el diairagma inmór,ila r¿lnLlra 10, iluminado con Ia [ámpara 1,1. Después de interr,alosdeternrinados de ticmpo Ias ranuras c1e ios discos en rotaciót-tcoinciden con la rauLrr¿l del diafragma. En este caso, a través deellas pasa el haz de luz que, mediante un sistema de espsjos /2,
152
Fig.53. característica de tracción de un tractor de oruga en un campo despLrésde cosechar alIalfa.
Consideremos, en calidad de ejemplo, Ia caracterÍstica de t¡ac-ción obtenida durante los ensavos de un tractor de oruga en uncampo despuós de cosechar la aitalia (fig. 53). -6-
La característica atestigLra las elev¿da-" cualidacles de acl-herencia del tractor. La curva de patinaje ü tiene un carácterlineal casi en toda la gama de los esfuelzos de tracción en elgancho, y en este sector el va lor del patina je no excede el 40k.,sólo par:a la primera rnarcha disminuidá, con'esfue¡zos de tracciór.
1000 6000 8000 Pcor,Uf
I
I_t153

(
rnuy elevados, el patinaje comenzó a aumentar más intensamentey su valor alcanzó al final de la característica hasta el 8%.
Para todas las rnarchas en los puntos de inflexión de las cur'vas de potencias de tracción Ng^r', 0l ccnsumo horario de com'lrustible G. es idéntico y alcanza el valor máximo. El aumentoposterior de la carga en el gancho, provoca el comienzo de su dis-Lninución. Esto demuestra que el motor en los puntos indicadosse cargaba a la potencia máxima. De esta manera, las. potenciasde traóción del tractor se limitaban con todas las marchas por lapotencia del motor.
La potencia de tracción tiene su valor máximo con la terceramarcha. A medida que disminuye el número de la marcha dismi-nuye un tanto la potencia de tracción máxima. Aproximadamenteen un mismo valor, ésta disminuye al pesar a las dos ma¡chasmás altas contigLras. Para las marchas siguientes, a velocidadesde movimiento mayores que 7 kmlh, comienza una disminuciónintensiva de Ia potencia máxima, principalmente a causa delaumento de las pérdidas para 1a rodadura del tractor.
EI rendimiento de tracción máximo del tractor tiene con di-ferentes marchas distintos valores. Este puede ser determinadodividiendo la potencia de tracción máxima respectiva por Ia po-tencia mdxinta del motor, ya que en la característica que se ana-liza las potencias de tracción máximas se obtienen para todaslas marchas estando el motor completainente cargado. Una vezdeterminado e1 valor de la potencia máxima del motor según lacaracterística, registrada antes de los ensayos de tracción, fuecalculado que para las primeras cuatro marchas el rendimientode tracción máximo del tractor se halla en los límites del 73-760/o; estos valores corresponden "a los índices comunes para trac'tores de orugas en suelos duros. Para la sexta marcha el rendi'miento de tracción máximo disminuyó hasta el 650/0, Y para laséptima, hasta el 57%.-
Por los resultados de los ensayos de tracción se determina elcoeficiente de reserua del esfuerzo de tracción
DEanmáx
rotfac- D ,, g an,A/
(68)
que representa la razón entre el esfuerzo de tracción máximo enel gancho Pgun.5*, desarrollado para unt marcha dada y el es'
Iuerzo Pgun¡, obtenido para la misma ntarcha con la potencia
de tracción máxitna. E I valor clel coeiiciente de reserva del es'Iuerzo de tracción depende principalmente del valor del coeficientede adaptación del motor del tractor segútn el momento. En la ca'racterística de tracción analizada éste variaba en depeadenciadel número de la marcha en los límites kfiac: l,0B . 1,16.
Durante el análisis de la característica de tracción, el rendi'miento económico de combustible del tractor se evalúa por el
r54
consumo específico de combustible por caballo de fuerza de trac-ción por hora para. la potencia mayor de tracción, y por el carácterde las curvas de los consLlmos específiccs de conibustible. En lacarac.terística. que se analiza, los- consumos específicos de com-bustible con- la potencia de tracción máxima tienen para los cincoprimeros números de las marchas casi idéntico
- valor, 225_235 gr/CVh. Si se tiene en cuenta Que SgaotVgan: §sN., de don-de sg,n : g, #!- - --g3-, cntonces, un consumo tan pequeño- 'iYgan Itracatestigua la economía del motor y un rendimiento de tracciónsuficientemente elevado del tractor. Para las siguientes marchaslos consumos específicos de combustible con la potencia de trac-ción má.rima, asciende hasta = 250 gr/CVh para
-la sexta marcha,
y hasta x 290 gr/CVh, para Ia séptima. E[ ascenso de los con-sumos específicos de combustible se provoca por la disminucióncon estas marchas del rendimiento de tracción del tractor. Estecarácter de las curvas es típico para tractores con motores dieselque trabajan en suelos duros. No obstante, a pesar del transcursofavorable de las cllrvas, los consnmos especificos de combustiblecrec,ieron el 35-50fle disminuyendo el grado de aprot,echamientode l3 potencia de tracción del 100 al 50%. Ello indica que /atnsuficiente carga del tractor eierce urua tnfluencia mug negatiuaen su rendimtento económico de combustible.
§ 7. Mediciones dinamométricasde tractores con máquinas suspendidas y accionadas
Las características de tracción del tractor, registradas por elmétodo expuesto en el párrafo anterior, son aptas principalmentepara analizar el trabajo del tractor con máquinas remolcadas.Durante el trabajo con máquinas suspendidas, éstas no son sufi-cientemente evidentes, ya que las máquinas suspendidas por suacción sobre el tractor, se diierencian esencialmeñte de las-de re-molque.
EI estudio de las cualidades de tracción de conjuntos suspen-dido.s presenta _dificultades considerables, a causa-de la imiosi-bilidad de medir directamente la resistencia de tracción de lamáquina sr-rspendida con un dinamógralo corriente, como se rea-liza durante los ensayos del tractor con máquinas remolcadas,A.d.emás, para el análisis de la dinámica de los conjuntos suspen-didos no es suficiente saber sól r la resistencia de lracción d-e lamáquina sLrspendida, sino que es necesario también tener datosacerca del valor de la carga complementaria de las fuerzas verti-cales que actúan sobre la máquina, y.de la iniluencia de la acciónde las máquinas sr-rspendidas en la distribución de las reaccionesnormales del suelo entre las ruedas delanteras y traseras deltractor, o correspondientemente, en la disposición
- (el centro depresión del tractor de oruga. Por consiguiente, las mediciones
tf
frIt
Ittl
'tl
'tltrttll
tttttliltltltltl$(.1
,tt
rtu{l
155

linamométricas de tractores ccn md4uinas suspendidas deben"ealizarse segtln un método especial em,pleando los respectioostparatos de medictón.
El método empleado en Ias mediciones dinamométricas de:onjuntos suspendidos se basa en la medición de los esiuerzos enas articulaciones que unen la máquina suspendida al tractor.
Para comprender esto, analizaremos previamente la dependen-:ia existente entre las fuerzas que actúan sobre la máquina sus-rendida en el plano longitudinal-vertical y las reacciones por
rig. 54. Esquema para determinal las ¡eacciones en las articulaciones de uniónde la máquina suspendida.
rarte del tractor, que se originan en las articulaciones de uniónlcl apero suspendido. Designemos (iig. 54) las componentes lon-¡itudinaies-horizontales de estas reacciones con Q-, y las verti-:a[és con Q, afradiéndoles un índice numérico que indique ellúrmero de Ia articulación de unión. Las respectivas luerzas qucrctúan sobre la máqLrina suspendida son: el peso Go, las reac-riones resultantes del suelo cn los órganos dc trabajo - la hori-:ontal R., y la vertical R, la reacción vertical del sLrelo I,, sobreas ruedas de apoyo, y la fuerza Xn cle resistencia a la rodad,¡rale Ias ruedas de apoyo. Expresando las condiciones de equilibriole la máquina suspendida en el plano longitudinal-vertical a
rar¡és de la ecu¿ición dc las proy'ecciones IX:0 y XY:0, ob-:en elTlos:
Q', f Q.": - Q.'s: R, * Xn;
Qrr * Qy: * Qs,: C, + R, - Yn.
oxt+Qxz
r56 157
Ptrr" : XQ."i AG: IQc.
De las correlaciones obtenidas se deduce que losPt.a" y de AG pueden ser determinadcs miclieido lasr.izontales - longitudinales g ueriicales, que acttian enlaclcnes de unión del dispositiao de suspensiór,.
Se conocen dos métodos de mediciorres dinamométricas de
indicados con ayuda cle barras tensomátricas montadas en las ar-ticul acion es.
p ens ron.El principio de funcionamiento de las barras tensométricas,
que se Lrtilizan en las mediciones dinamométricas de los coniuntossLrspendiclos segúrn el segundo método, puede ser analizado- en elesquema de la fig.56. En el esquema se lluestra una barra tenso-métrica dc tipo de consola; clependiendo de la estructura del me-canismo de unión las barras tensométricas pueden ser hechas enforma de ulgas sobre dos apo7os.
(6e)
valo¡es defuerzas ho-las articu-
(((((((
(
(
(
(
(
(
(
(
(
(
(
(
((
(((

|l
D
D
D
D
':r
ir
t,
¡rt
t'f'b'
It'
t,
lr
f,\
t1
t)
{r
Sobre la barra a Io largo de su generatriz se pegan (iig. 56, a)rtos captadores de alambré I y ! i una distancia I uno del otro.listos pueden estar dispuestoi en cualquier lugar .entre el ex'tremo fijado de la barra'y el punto de aplicación de la fuerza quenctúa sóbre la barra Q.- Los captadores se conectan al puenteclóctrico de medición, como se indica en la fig. 56, b, y crea allírkls brazos de trabajo; otros dos brazos se orlgtnan por los capta'dores que no son de trabajo, que sirven para equilibrar el puente.Cuandó \a nuerza Q:0, el p-uente está equilibrado; como resul'tado de la deformación de la barrabajo la erza Q, elpuente y en sudiagona e crea co-rriente. de ambos
qbFis. 55, Instalación de dinamógrafos Fie. 56. Esquema d.e .funcionamiento.n'ioi-iiirnt.s del dispositivo de" sus- de una barra tensométrica tipo de con--" '-- --¡;n;lón
det tiactor. sola'
captado ta tensiOn.que se. origina en ladiágona ilibrarse el puente
. tiene, como
pu.?. s €n la teoría de los instrumentosde medi
U:AQ,siendo A: factor de proporcionalidad constante para la barra
tensométrica dada.El valor del factor A no depende del isposic-ión de
ta luerzo flexante a lo largo de la barra a, si duranteel irabajo'se produce et deéptazamiento d aplicación de
ista fuelrza, yu qu. el resLrltado de las m proporcionala la 'difereniiu á. los momentos de flexió, M¡- IlI2 en los luga-res donde están pegados los captadores, cuyo valor en todas las
condiciones indicadas queda constante.Las barras tensométricas brindan la posibilidad de mcdir los
esiuerzos de flexión en dos planos perpendiculares entre sí. Para.ito .r necesario pegar en
'las barras dos pares_ de captadores,instalánclolos poi iaí generatrices que se hallan bajo un ángulo
168
de 90o uno respecto al otro. Un par de captadores se deLe ubicaren el plano paralelo a la superficie de los órganos Ce trabajo dela máquina suspendida, el otro en el plano perpendicular ai pri-mero. En este caso, cualquiera que sea l¡ dirección del esfuerzoque actúa en la articulación dada, serán medidas sLls componen<tes horizontal y vertical. Cada par de captadores debe conéctarsea un puente de rnedición índependiente. Para la medición de losesfuerzos Q, y Qu en las tres articulaciones de unión del disposi-tivo de suspensión, es necesario tener respectivamente seis puen-tes de medición de este tipo.
Los esfuerzos totales Ptrac: IQ- y AG: Qy se determinanp^or el _método de adición eléctrica de los esf uerzos componentesQ* y Qu, que actúan en las tres articulacio-nes de unión. La adición eléctrica se realizaconectando los captadores que miden losesfuerzos homónimos en las articulacionespor separado, por puentes eléctricos demedíción cotnunest a un puente'de adiciónse conectan los captadores que miden lasfuerzas Qr, al otro, las fuerzas Qr. En la fig.57 se da el esquema de un puente de adi-ción, compuesto de tres brazos conectadosen paralelo, en cada uno de los cuales entranlos captadores pegados para medir los es-fuerzos correspondientes en una de las ba-rras tensométricas. Cada uno de los capta- y1 pl.nl.-,(:"-*iqryl'dores esiá designado en el esquen-,u p# r, te) de mglida suma-
dor.número de orden con el índice numérico queindica el número de las articulaciones de unión; se adopta, quelos captadores están pegados en las barras tensométricas- de tipode consola, según el esquema dacto en la fig. 56,a. La tensiónque se origina en la diagonal de medición del puente de acliciónes proporcional a la fuerza resultante que se mide, y en el dia-grama se registra directamente su valor total.
En aquellos casos cuando, jLtnto con Ias iuerzas totales P¡,.n"y Aq,es necesario- tener los valores de las componentes Q- y Quen diversas articulaciones, en cada barra tensométrica se tiénenque pegar cuatro pares de captadores, disponiéndolos bajo un án-gLrlo de 90o uno respecto al otro, como sc indicó más arriba; deellos, dos pares perpendiculares entre sí se conectan a dilerentespuentes de medición elóctrica, y los dos restantes entran en cali-dad de brazos en los respectivos puentes dc. adición. De esta ma.nera, en total, al realizar las mediciones dinamométricas de los
t2 ?2
/3
vvv
23
/
Fig. 57. Esquema de
lr
ll
lr
ür
Iu
__,1
169

e los apel.atos tensométricos, Lrti-pares m<>tor, se emplea un dis-otro tipo, nediante el cual se
los captadores, dispuestos en laos registradores y ampliIicadores
casos_cuando,cl ,objetir,_o del estudio no e.rige unadet or separado de ros'rurá'.., d;lr[;; i;;;;;,puedelim medición ¿irecta
-¿e la potencia lVnl¡, utilizandopu' incipio .dc nttrt¡tricacitin'eréctrica áéi iálto,. o.Iue el factor dc r.elocidad ¿otr Ef-principio Ae Iamu e basa en que si se alímenla el p'r,.ni..lle.tri.o,
(l(l
en Ios devanados del tacogeneraclor esproporcional a la velocidacl angular derotación del indLrcido.
Fig 59. Esqucma,de,¡rincipio.de un tlispositivo tensornétrico par¡ meorr ta potencra transnlifid¡ (
(
(r(
(
(
(
(
(
(
(
t
t
t
tttt(
EJE\IPLOS DE CÁLCt,'LO
.,_,-^!i".plo l. Se, requiere efcctuar er cálcuro ric irace ión de un tractor v deier-n'nii srs Drr¡r¡ctro. nrinr ip¿.,i,.s: tr pcso, t:¡s icrou,áacrc.'i.;r;;;;;irrá crl.u.ladas y Ia potencia noriinr, qel mutor.
e léc tr ico
',,'%/
I rio
l6l

Dntos iniciales: tractor de ruedas 4 X 2, clase de l'4 t; número de mar'fhfl - J¡ete, de ellas una de reserva. -cuatro- principales y .dog .d,e transporte;úllocldaa calculada rle movimiento con fue¡za de tracción nominal trz"r : 6 km/h;l¡iái1¡;¿ de transporte máxima 7rnáx= 28 km/h; rendimiento de la trans-
mlrlón con la l' marcha principal rltrr:0,88.""- ii.t.r*inrmos la gama de traición del tractor 6t. De acuerdo con la fór-lllulo (44), tenemos:
Do,:, ,),¡n
Adoptando el coeficientedeexpan-sión de_la.zonadetracción del tractor e -- l;5, í teniendo en cuenta que ia fuerza de tracción nominal de la clase que
lo nntecede P'. : 9oo kgf, obtenemos:llót:l,s-¡5.-2
por Ia fórmula (a5) hallamos el peso de explotación máximo del tractor:
^ Pn
umáx: qÉe"l;=¡'
Tomamos un valor del coeficiente permitido de utilización del pes-o de ad-
¡crenciá enr"r : 0,65, el coeficiente de carga de las ruedas traseras ltr : 0,8,
v el coeficiente de resistencia a la rodadura durante el trabajo con carga de
[racción nominal en el gancho II : 0't2; de esta manera'
Gmá*:
"r"#!m" - 35oo kgr'
Et peso de explotación mínimo de tractores de rueda de clase de 1,4 t se
hatla aátualmente' aproximadamente en el nivel de GmÍn : 3001 kgl Para
aumentar el peso de explotación del tractor hasta el valor necesario de Gmáx,
es preciso emplear lastre, cuyo peso según-la fórmula (46) será:
Go: I, (G'¿* - O*in): 0'8 (3500 - 3000) : 400 kgf '
Para last¡a¡ el tractor se aplican pesos en agua en losneumáticos. Basándonos en la práctica-existente de las car'sas isuat a ll0 kef (70 kgf en cada rueda), la ante se log-ia lle-nando de ag"ua aprox-intadamente la mitad neumáticos.
La elección áe las'vefocidades del tractor se inicia determinando la gamaóro, de las velocidades nominales princtpales. Por la fórmula (49)' adoptando
el ioef iciente minimo de carga del motor Ynr¡¡¡n : 0,85, tenemos:
óro. : Y..ín6t : o'85'2: l'7'
La serie de marchas principales se construye por el principio de la progre'sión geométrica. Por la fórmula (50) su denominador:
o: 'i/q; :4/i = 1,2-
obtenemos la siguiente serie de valores calculados de las velocidades. prin-cipales: Vnr :6 t<m/tr; Vnz: Vrcl = 7,2 km/h; /n: :1/n2q = 8,6 km/h;V¡q : V¡t 6,,p, : 6,0 ' I,7 : 10.2 km/lt.
Tomamos la velocidad de reserva calculada
Vn"': 0'75/nt : 0'75' O : 4'5 km/h'
162
La velocldad de transporte intermedia
7í, - 0'S (Vno * 7.¿*) : 0'5 (10'2 + 28) : l9'l km/h'
La potencia nominal requerida del motor según la tórmula (52)
, - [P" * /r (G.in * Go)lY.r"_w
Adoptando el coeficiente de carga de explotación del motor' que se tiene
.n .r.nti al componer los conjuntoJtractores, f"x : 0,85, obtenemos
(1410+3,12'3400).6270. 0,88 . 0.85 = 55 CV.
ximo no : 1200 r. P. m.;"^"^""i'ioeiic-¡ánt. á.-aáaptación del motor por el momento É':1'15;;i ¡;;;r*" horario ie ü*uu.tiut. con'potencia rnáxima G"-r*:9 kg/h
en marcha ximoe[ coe toma
nrente el P¡hg
fuerza de urva
de las rue iendo
de utiliz ncia'En fig' 38) de teórica de tracción
trazamo pires motor por el m.o,tor.' .y los
valores 'de las iuerz 'de tracción del trac-
tor P1". ptan para el an pariiendo de que
,,-:b - !-ij'\"--
¡¡1^,tg fr rt
siendo z4:+ el coeficiente de conversión de la escala de los pares M-,
kgi.m, a ta escála de fuerzas Ptg, kgf. Para cada marcha éste tiene su valor,En nuestro caso
: 103,12; or: Y+# :70,78; A¡rr : E## :4e,22
o O' ere-Ia e alo_
bajo fac'ment Enal p mo'
_-t
163

lor Mo y el par nlotor máximo y'1ur,.,á*. La disposición de estos puntos se de-
termina de la siguíente fo¡ma. Según los datos del problema
¡vl n:716,2Mn
,,n
A lo largo de lo§ ejes de o¡denadas marcemos los f¡ctoi'es de escala de zrque-llos parámetros, que deben ser representados en cada parte de la caraterística:
716,2.50-l 600 :22,4 kgi.m;
, rtrf ,nr,,5* : Én,ñln : 1,15 . 22,4:25,76 kgf . m.
_ _. Multiplicando los momentos indicados por los coef lcientes de conversión A,hallamos- para cada marcha los respectivos-valores de las fuerzas tangencialesde trección Ptg. n y P,n,nr*.
La posición de los valores hallados de P,*. n y Ptgr,,ix Ia marcamos a pa-
res, separadamente para cada marcha, en eI eje de las abs,:isas y los puntosque les corresponden los pro),ectamos sucesivamenlc a las escalas de los mo-nrentos de las marchas preIijadas. De esta forma, en cada escala se regis[ran,comc se indica con ilechas, las posiciones de los puntos IIn y ,'1,I,n,r5.*
Seguidamente. determinamos la resistcncia a la rodadura del traclor
Pt: t(G +G¿) :0,1(3000 + 150) :315 kgf.
Del_punto O'trazamos hacia la derecha por el eje de las abscisas el seg-mento O'O, que represenia en [a escala adoptada la resistencia a la rodaduial)¡. Los punlos O'y O sirvcn como centros de las coorcienadas de Ia pirrie in-ierior y superior de la característica de tracción respectivamente; Ias üerticalestrazadas desde éstos hacia abajo y hacia arriba son los ejes de las ordenadasA lo larso de lo§ eies de o¡denadas marcemos los f¡ctoi'es de escala de:rorre-
ciente de uiilización del peso de adherencia del
condiciones dadas el peso de adherencia
oro : 1o * G¡* rlf * Ps'n/'s'n :] r ro, *
tractor qu : *
Para las
l5¡ ¡ P fl'so'*-Prunhson
:2 ttc+ SF :2 $o+ $ r,gr.
seguidarnente, por la ecuación de la curva de patinaje obtenemos los datosnecesarios para trazar esta curva.
calculamos las velocidades reales de movimiento del t¡actor por la fórnrula(55a):
Haciendo
_ (l - 6) 0,377r,n^km/h.itr
uso dc nuestros datos iniciales
vt:
vt¡:
(l - ó) a377 ,A,73 . n,n
83,53
(l - ó) 0,377 .0,73. n^57,41
te nemos:
:0,0033nm (l - ó);
:0.00,18/¡n (l - ó);
(((tc
r(
t(
((((
((
(l
((
((((
'(
llos parámetros, que deben ser representados en cada parte de la caraterística:No, /'rn, y G" en Ia parte inierior, ó, y, tVson y ggan en Ia parte superior. Losvalores nulós de todos los parámetros indicacios los tomamos por el eje de abs-valores nulós de todos los parámetros indicacios los toma,ros por el cje de abs-cisas, excluyendo la frecuencia de rotación del árbol del motor, cuy'o trazadopara.tacilitar la representación se comienza desde nnr : §00 r. p. rr1.,'y la velo-cidad de movimiento del tractor, cuyo punlo nulo lo disponemos so6re el ejede abscisas.
En la parte inlerior de la gráfica se muestran las curvas de Ia característica
con el centro de las coordenadas O'con liueas rectas, las clrales reDlesentan Iasra¡nas de regulación cle las caracteristicas del molor; los lirnites dé los sectoresde trabajo de Ias ratnas sin regLrlación de las características se hallan en lasintersecciones de las verticales, trazaclas de los puntos,iirr,,ár en las esc¡lasde los momentos, con l¡ recta horizonta-l que pasa por el pLrnto
'vo: ¡'l':',':,,:"0
- 25'7-6:l-2oo :43,16 cv716,2 716,2
en el eje de ordenadas. Las ramas sin regr-rlación de las curvas N" las traza-
164
-. (l - Ó) 0,3;7 ' 1,73 ' nn,I"ttt: ----59,93-: ',0069¿m
(l - Ó)
La potencia de tracción del t¡artor se c¡lcula por la fórmula (b6):D I/ D D
\'---: ' :l-1' : 'tr-ll CV.'' srn 270 27¿
_ Según los_resultados de Ios cálculos en la partc superior de la carcterísticade tracción están trazad¡s las curvas l'y,Ngan para cada una de las tres mar-chas cladas.
Para hall¡r los consumos especí[icos de combustible por caballo de fuerzade tracción por hora, empleamos la fórrnLLIa (ó7) :
l03c^ggan:;j gri CVn'
' '-aa n
Los valores G" dc consunlo horario clc combustil¡le, correspondientes a lapotcncia de tracción desarrollada Ng^n, los tomamos por las curvas Os del cua-clrante inIerio¡. Realizamos los cálcLrlos por separado para cada marcha, comen-zando por tVgan :0,5.\'gun.,,ir. Por los resultados obtenidos están trazaclas
las curr,as ggan E!1 I característica de tracciónEjemplo 3 Un tractor de ruedas 4 X 4 con ernbrague de rueda libre entre
ejes trabaja en la srembra de cereales con dos sembradoras de remolque; elpuenle delantero puede sei desembragado y enlonces el tractor irabaja por elesquernr 4 X 2. Se analiza r-rn trabajo estable en terrlno horizontal.
Sc rcquiere rletlrntinar:L En cLr¿1nto se reduclrh el paiinaje de las ruectas motrices del tractor (tra-
seras) al embragarse el puente delantero2. Cómo se distribuirá la iucrza tangel:ia) cle t¡acción entre los puentes
trabajando el tractor scgún el esquenra 4 \ ,'.i..
Datos iniciale:i: peso clel traclo: G: ¿1000 l;gf, rle ellos en nosición está-tica en las ruedas traseras rccaen C2..¡ : 1900 kg[, en las ruedas delanterls
,(
(
(t(
L(
,(-(
165

0r¡¡r - ll00 kgf; batalla del t¡actor I :2,4 m; resistencia a la tracción de lasmmbradoras Pi^o : ll40 kgf aplicada a la altura hsao :0,4 m del suelo. y
dlrlglda paralelamente a la §upeificie del camino; resi§tencia a la rodadura delItlclor Pl : 500 kef; momentb de resistencia a la rodadura
tlcndo r, :0,735 m es el radio de las ruedas traseras Y ra :0,4 m, e[ de lasdcl a nteras;
el embrague de rueda libre entre ejes acopla e1 puente delantero, cuando el
n[tlnaie de lás ruedas traseras alcanza una magnitud 6z: 590; el patinaje de
lns ruédas (traseras y delanteras) transcur¡e según la ley:
ó'/, :8# * -, (#)B: Ber< + aoqf,,
P._slcndo q¡.-¡; el coe[iciente de utilización del peso de adherencia O"¿,
transmitido por Ias ruedas respectivas, y Prg la fuerza tangencial de tracciónoLre éstas desarrollan.' Primeramente determinaremos la magnitud 62 de patinaje de las ruedastraseras trabajando el tractor por el esquema 4\2.
La fuerzá tangencial de tracción, desarrollada por las ruedas motrices,
Ptg: Pg,o + P¡ : I 140 + 500: I 640 kgf'
El peso de adherencia de las ruedas
Mt+ P.""hGud:Gzest -tI]]E:1900+
,, (+ o,7ss + *.0,*) + I r40.o,4
M¡:Pt(?n**"),
Introduciendo los valores de Gr y Gt en \a ecuación de las fuerzas tangen'ciales de tracción del tractor, obtenemos:
D_'ta- ,
de donde hallamos que
D_,tg e¡¡ (oa - 0,224P ) * e¿, [G (L - a) + a,224P r] q¡,2528 *e¡24672¿ * (qkr - rP¡2) ág"n 2,4 - 0,4 (Arz - Ar.r) '
+ :2220 kgf,
Expresemos los coeficientes gr<r y ek2 que entran en esta ecuación en iun-ción del patinaje de las ruedas respectivas, utilizando para ello la ley dada delproceso de patinaje. Los resultados de los cálculos están representádos en lagráfica (iie. 60), con las curvasgur: f(óz) y err: f(6r). Te-niendo en cuenta que las ruedasdelanteras se embragan a latransmisión dcl momento detracción, cuando el patinaje dclas ruedas traseras alcanza unvalor 6::50/0, la curva qt¡está desplazada por el eje deabscisas a Ia derecha y comien-za en e1 punto O', donde0z : 5%.
Teniendo las curvas rpr r ygrz, calculamos por la fórmulaobtenida más arriba los valoresP,r de la fuerza tangencial detracción del tractor con diferen-te valor 6: de patinaje de lasruedas motrices traseras. Porlos resultados de los cálculosen la fig. 60 está trazad,a lacurva P1g : f(óz). La curva
En. la gráfica con una línea de trazos está trazad,a la curva Ptg2:l(ó2),que indica los valores de las Iuerzas tangenciales de. tracción, desarrolladas pórlas ruedas traseras. La curva se traza según la fórmula:
D _^ ^ G(l-a\*p,*á*.n+0,224pf,-tg-.:Vk.j;r:nU,-
Los segmentos de. l.as ordenadas P¡e- P¡e 2 caracterizan el papel quejuega el puente motriz delantero.
Fig. 60. Gráfica de tracción de un tractor4 X 4 con embrague de rueda libre entreejes según las condiciones del ejemplo 3 del
capítulo IV.9t
ó, % : Blifl + 40 l-lgg)r o 22oto.- 2220 '. '"\2220 )Al embragar el puente delantero, la fuerza tangencial d_e tracción- del trac'
tor Ptn es iguát a la-suma de las fuerzas tangenciales P¡g1 de las ruedas delan-teras y- P¡g2-de las traseras, de esta manera:
pt* : Ptg, -F Pts:: errGr * e¡rG2,
siendo rpr,r y ek2 los coeficientes de utilización del peso de adherencia, Y Or YG" los pesoi dc adherencia de las ruedas delanteras y traseras, respectivamente.-
Reiresentemos los valores Gt y Gz en la siguienté forma:
M¡*Pqonhgun n & P10,624+Psun0,4_-T-_U_TL-:
_ Ga - PBhrnn- 0,221P Í .
-[-;
ct : Gt"rt
, ¡'ft+ Pu^nh*nn o (L-a){P1g¿gun +0,224Ptuz:u2estt r __.
En estas ió¡mLrlas a es la coordenada longltudinal del centro de gravedaddel tractor. Esta se determina de la correlación:
a ,."¡: Gl', de donde o: , o
á"' : 0,24 # : 0,88 m.
160

Capítulo V
Ecor¡oilría de com¡bustibley dinámica
de tracción del automóvil
i l. Factor dinálnico y características dinámicas
Del balance de tracción del automévil que, de acuerdo con lafórmLrla (16), se expresa en el caso general de movimiento cr¡n/ a ecuación:
5e deduce que
PE: gC -+- ógr,G nL+
e*,
P,=-P.:O($*O*,.á)
automóvildinárnicas.sr designa
(70)
En esta ecuación, la diierenciu P.u-- P,, representa la Iue¡za/e tracción necesa ria para superar todas la,. resistencias exte-
fnerza cle tracción que recae por unidad de peso del(autotrén), pur,'de servir como índice de sus cualidadesLa relación explresta se denomin a f actor dinámico v€n lo sucesi\,o con la letra )
E,l factor dinár¡ico se calcula por la fórmulaII,,,1,rrl,.
D: P'o-^ P"
-- \ -- ''-
OGEn esta fórmula el par motor r,1, se tr¡ma de la caracterÍstica
de velocidad, registrada con la válvLr la cle mariposa completa-¡nente abierta, ya que el Iactor dinámico se deter¡nina trabajanrloel motor con carga completa.
Entre el Iactoi- din¿rmico y los parámeLros ciue caracte rizan laresisterrcia al mt¡r'imienttr 6lql antomór,il, e.xiste la sigLriente de-pen dencia:
Fig
ofrece Ia f ig. 6l .
deL automóoil.
Si el embragueentre la velocidadcuencia de rotaciónque se expresa con
/ V'l,áx v1,,,í^
Característica d inirmica del automóvil.
Esta gráf ica se denomin a característica díruamica
Consideremos la confección de la característica dinámica.
(((((((
I
o
..y.lus. ruedas motrices no patinan, entonces,V, kmlh, de movimiento del automóvil v la fre-txm, r.p.m., del motor existe cierta depéndencia
la ecuación antes dada (55):
\r 0,377rrn*,:-.It.
Utilízando esta ecuación, determrnamos por separado Dara cadamarcha, Ia irecuencia de rotación der morbr u ai¡".árfuJi.Llo.r¿u-des de movimiento del automóvil. Luego, según la caiacterísticac1e velocidad del motor, registrada co.-n
'la íatvulá J.--u.iporu
completamente abierta, hallamos los valores de los pares
(
(
(
(
(((
(
(68
D: ü t ógir (71)
169

ItIIt
I
I
I
lrrrttlr M-, correspondientemente a estas frecuencias de rotación'
iutr.ocluciéndolos 'en la iórmula (70) y haciendo lof cálculos
ilr,r,r:sarios, obtenemos los datos iniciales pata ttazar IaS curvasii,,l f actor dinámico. La resistencia del aire P,r,. -que .entra en
l¡r iórmula (70), se determina prr la ecuación (l2a) dada más
rr rr iba.E; Ia fig.6l se muestra la característica dinámica de un ca-
¡rri,rr., con t?ansmisión de cuatro escalones. De acuerdo con el
iiiiir,.ró ¿. marchas en la característica están trazadas cuatro,:',;i;;;- ¿ái iá.to. dinámico. Los números de las marchas están
ill{icidos en las curvas con números romanos. Cuanto más bajot,s el número de la marcha tantorlcl factor dinámico, a causa deltlc P,. A la izquierda las curvasrotación mínima, con la que es
rrrotor, y a Ia derecha Por la frec;;iiiá;.'Los puntos de' inf Iexión de las curvas corresponden al
luncionamienio del motor en el par motor máximo'- üáiiOn¿ose de la característlcr dinámica pueden ser resueltos
¿ifeienies problemas que surgen durante la éxplotación de1 auto'móvil. Anaiicemos algunos casos de su utilización'
qué marchas debe trabajar el
, !' ["i,i.'tio e:''xT ¿:' :i.T;";;iorme Y cuáles son en este caso
las velocidades máximas que puede desarrollar. Durante el movi-
i"i.nto estacionario el fabtor' dinámico del ar-rtomóvil debe ser
isii^i rt coeficiente {. Por ello, para responder a la pregunta for-
iirü¿á, obramos de'la sigLrient-e'manera. Trazamos en el eje. de
áiá.noiur de la caracteríltica dinámica una serie de segmentos,
que la -escala adoptada-.para. el ,factor dinámico'los e rp', rp" ." (.h ta fig' 61- están trazados dos
de ). 'suionicndo que el coelicicnte rp al variar
las movimiento con§erva un valor constante, tra-iu*or por los extremos de Ios segmentos trazados rectas, para-
lJ;; ^t'eje
de abscisas, hasta la iñte_rsección en los.puntos a y.b
.ár-frt ilrrru. del factor linámico. Las curvas en las que están
ái.o*estor los pLrntos de intersección, dete¡minan los números
á. '1u, marchas'buscados, y las proyecciones de estos puntos en
"i.i. de abscisas indican los vajorés respectivos de las posibles
vctó'.i¿a¿.s máximas de movimiento V'*,1' Y V"^5,' ..- por la caracteristica dinámica determinemos cuáles son las
resistencias máximas de[ :amino que podrá strpera.r. el automóvil¿'..piárá"¿ose con una u otra márcha con
'elocidad unilorme'
iu qu. en estos casos deben ser utitizadas Ias reservas máximas
áel iactor dinámico, el trabajo debe realizarse en los regímenes
.oir.ipon¿ientes a lbs pLrntos'de inf lexión de las cur\ras del iactorái"i*1.".-por esta ra)ón, las crdenadas de estos puntos deter'
r70
nación tenemos:
n -
P'P- P'UQ_ A
Para un automóvil con ruedas motrices
,*:L?:QT,_traseras
D'@a'
(72)
(72a)
,:l
rl,t,a
rl
r0
rl
rf
,
t
ú
ción (71), con movimiento retardado i- D - I * Ó*,, á'
t7t
_-*- ¿_-

ual el aufomóvil supera la rampa y cuanto menor es la longitude ésta.
En los datcs de iniormación para automóviles, generalmentee incluyen total o parcialmente los índice*c siguientes, determina-os en la caracierísiica dinámica:
1) velocidad máxinta con movimiento estable paraiones del camino rnás típicas para el iipo de automóvil
2) factor dinámico con la t¡ansrnIsión directa a lae movimiento más utilizado para el tipo dado de
eces mayor qLle en el prímei- eje. Unamos con rectassegmentos de la escala izquierda con los segmentosgún la longitud en el segundo eje de oráenadasuntos de intersección de estas rectas con las verti-
cales trazadas en la característica, crean en cada vertical su es-cala del lactor dinámico para la correspondiente variante de cargadel a utomór'il.
extremos de los segmentos trazados se unen con una línea detrazos, como se Índica en la fig. 62. (En caso particular, ésta
Ias condi-dado;velocid a d
automóviluna velo-de la má-
(generalmente se tomacidad igual a la mitadrirla);
3) valor máximo del [actor di-námico con la transmisión directay el valor de la velocidad que a
ól corresponde;4) f actor dinámico máximo con
ei número de marclta interior;5) valores máximos de los f ac-
tores dinámicos con las marchasintermedias.
La ca¡acteristica dinámica, enla fig.61, está confeccionada paraun automóvil de peso determinado.Para que ésta pueda ser utilizadapara eI análisis de las cualida-des dinámicas del automóvilcon diferente carga, aproveche-n¡,os la clrcunstancia de que en laresistencia a la roda dura Pri: +G en igual mec.lida inlluye la
((
is. 62. Característic¡ clináruicanlversal del autonrór'il (según l:rs>ndiciones del ejenrPlo 2 del ca-
pitulo V).
elegido de tal manera que rf.onG :.S9,.. De aquíurior.¡,.0n se clebe dete-rminar por la fórmula:
t<n/h
t['"o,'
((((((
encional $.or,allamos que el
G"- t, -G
((((((((72 173

r r Ír ttt ico.
§ 2, Aceleración del automóvil
Con esta suposición Ias aceleraciones Celmayores y su valcr, de acuerdo a la fórmulacon la expresión siguiente:
i:oD-Ñ,6_\.
'g lr
automó.¿il serán las(71), se dete¡mina
(73)
IIII,,
u
t
lr
de la aceleración tu¿, o sea, el tiempo duranteáel uutomóvil aumenta desde el valor inicialvalor final Preestablecido u";iceleraciói So., que recorre el automóvil al
. P. q-qli se. deduce que la aceleración depende de dos factores:de la dif erenica D - {¡, o sea, der e*cesó del f acto¡ dinámicosobre el valor del coeficiente reducido de las resistencias delcamino, y del v.a-lor del coeficiente 6srr, Qüe tiene en cuenta laresistenci.a ejercida-a la aceleración pór rás masas giratorias delautomóvil. En condiciones prefijadas del camino 1a" aceleración,con el aumento del factor ¿inariico crece y, con el aumento delcoeficiente ógir Que representa las masas giiatorias, por [o contra-rio,-disminuye. cuanto menor es el númáro de la niarcha con lacual comienza la aceleración, tanto mayor es [a diferencia D - r¡r.
F i g 63 "j1:,,1 :,:"': :':1'J",1':, ::j,, "'o' uu
"'
ógrr:l+slda
t,
¡l
r)
¡i
¡f
Il
tl
de aceleración;2\ la durabilidad
el cual la velocidadadootado u'hasta el
á) eL camiln de
tr
t,
l9
f,
i0
(f
Vntír
175

i 'ild\'fl:i,Tr?:lilt;i[ii:J'i#3j:l]iturismo Ia curva de aceleraciones con la
archa superior cruza el eje de las abscisas; el punto de inter-
rcción determina la velocidad máxima de movimiento 7,,¿* posi-e para las condiciones del camino dadas; en este pun\o. la ace-
,ulión es igr:ai a cero, y, por consigLr iente, es imposible el ul-rior aument-o cle la velocidad. Para el camión la curva de acele-
ciones con la primera marcha se dispone más abajo que.con la
:gunda, el mofii'o de tal disposición se .e.xp1icó más arriba; la:iocidad máxima de movimiento del camión 7¡¡1¡, no puede ser
evada en el caso dado a causa de la acción del limitador del
imero de revoluciones del motor, que ciei'ra la válvula de mari-rsa del carburador.
La cluración cle la aceleración pr-rede set representada en IormaLa duración de la acelefacron pLlede ser repfesenlaoa en luftrra: la integral cle los intervalos de tiernpo elementales dt, en el
.dar- tLl ' entonces
ientras que la duración total de la aceleración en segundos
anscurso-de cada uno de ellos la velocidadrcesivamente un incremento infinitamenteaceleración en m/s?
tlfC L, i'1,,:lt Cl ..::método gruloallal
n,:+,
clel automóvil recibepequeño du. Ya que
(74)
es la suma depr,rede ser ex-
/¡c
/..: J tlt :
De iorma análoga, el camtno de ¿iceleración S..rs segmentos elenierltales del camino CS - ucLt y
resacilo con las siguientes integrales:
lt,I rta
Jit'
:\ a clt.I
(i
(75)
La solución cte las ecu¿rciones (74) y (75) se clifictrlta por no
aber uli¿r clci,'':ttc!eltiiiL an¿r lÍticrr eirlre i )'. Lt all el llrimci- caso, )'
'' a.
.S-:\ dSU
I,i:-i:1o. Por estc,,itiiicemi-,s paia r.--iolverlasi'co ai,ioxir¡t¿icic. Su cscircia cclr:¡is!:e en lc
suierte: Iát .t tt'rt de Iás accleraciones se dir,'iden, colrlo ie,i,áiil, .n la fig. 63, b en una serie de segmentos, a los cuales
¡6 7 3a*. 5t9 t77
corresponden.en el eje de las abscisas para cada curva determi-nados intervalos de velocidad.es av; se adopta qu..n io. ii*it..de un intervalo el automóvil se acelera cbn aceleración mediaconstante.
l^"d :0,5 (lr * ir),
siendo it y iz: aceleraciones en_ los puntcs finales del intervalo,m/s2; correspondienteir-rente al tiempo de acelera-ción por cada l-ésimo intervalo.
At -
LV¡-,, - 3FiIa,, ,
y la duración total de aceleración en segundos desde la velocidadZ*in hasta I/,n¿*Vmáx
lu":)All: I' Vnín
e1 camino de aceleración, de forma análogade los límites de ca da intervalo de velocid-a-desplaza uniformemente a la velocidad media
LVt3,6lmed tj)
Para determinarse toma que dentrodes el automóvil seen m/s:
omed :0,5 (u1 * ur) : 0,5(vt+vr\3,6
(((
((((
Il
siendo vt y vz:velocídades en los puntos extremos del inter-valo, km/h; correspondientemente el camino m,qLle recorre el automóvil durante la aceleraciónen los límites de cada i-ésimo intervalo de ve-locida des
ASI : U,¡s¿1¡¡ A/¿
y eI camino total de aceleración
Vmáx
Sa"::AS¡: I o66¿1¿¡ A/¿,7r¡fn
tados obtenidos caractericen la dinámica dela aceleracién con inlensidad mdxinla, en elc n aquellos sectores de las curvas en laii aceléraciones, con irna velocidad de movi-miento dada, ti ra la segunda marchael sector a!; p y para"la cuarta, elsector de. Para áicúlos, los intervalosde las velocida pasan a las marchas

rnis bajas y se toman aproximadamente en los limites desde 2--3 km/h para [a primera marcha hasta 10-15 kmih para la
rrrarcha superior.La metodología expuesta para determinar los valores de los
índices de aceleración se basa en la cai'acterislica está,tica delnrotor y no tiene en cuenta su capacidad de aceleración, o sea,sLr propiedad de acrecentar 1a potencia con diversa intensidad deruceleración. Además, en los cálculos indlcados no se tiene encuenta el tiempo para el cambio de marchas y la disminución delrr velocidad de movimiento al pasar de una marcha a otra. Esto.sIactores dependen de las cualidades dinámicas del automóvil y elruotor, del método de cambio de marchas en [a caja, de las cuali-clades individLrales y pericia del conductcr y no se someten a uncálculo preciso durante el análisis teórlco. Por esta razón el pro-ccso real de aceleración se diferencia un tanto del proceso con-vcncional adoptado para el cálculo.
Para caracterizar las cualidades de aceleración de los autc-nróviles pueden servir los siguientes datos:
Para los camiones de capacidad media de carga, en carreterasIrorizontales asfaltadas, después de arrancar el tiempo de acelc-ración hasta una r,'elocidad de 50 l<m/h es de 20-30 segundos,¡'el camino de aceleracién es igLrai a 180-250 m; para los auto-rnóviles de turismo el tiempo de aceleración es considerablementenrenor y una aceleración en las condiciones arriba indicadas hasta50 km/h generalmente no excede de 5-B s; durante la acelera-ción en las mismas condiciones hasta una velocidad de 100 km/h,el tiempo de [a aceleración llega a 30-40 s. El camino de acele-ración en el primer caso llega a 50-80 m, en el segundo a 600 my más.
El aumento de las potencias específ icas de los automóviles,observado en los últimos años, mejora sus cualidades de acelera-ción, disminu.vendo la duración de la aceleración y reduciendo elcamino de aceleración.
§ 3. Economía de combustible
En el coste del transporte automóvIl los gastos de combustibleascienden al l5-20010. A raiz de ello, 1a clisminución del consumode combustible tiene un gran significado para 1a economía na-cion a l.
Uno de los índices principales de la economía de combustibleen los automóviles se considera la cantídad de combustible Q,,que se consume por 100 km de recorrido en moaimiento uniforme,a LLna aelocidad determinada con las tondícíones del camínodadas. El consumo de combustible se exDresa en litros, ya que enlas gasolineras la medición del combustible se resliza en unidadesvolumétricas, en vista de que en 1a actualidad no hay medidoresde peso de estructura fiable.
178
El valor de consumo de combustible Q", l/100 km,calculado por la fórmula:
puede ser
n _ §"Ne 100vs--ign'-y- (76)
siendo Nr: potencia, que desarrollamóvil en las condiciones
g¿: collsuño específ ico deal réglmen dado degr/CV.h;densidad del combustible, kg/l;
tiempo en horas necesario para recorrer 100 km a
una velocidad de 7 km/h.Si se conoce la resistencia total al ava¡ce del automóvil p**,,
que incluye la resistencia del camino y la del aire, entonces lápotencia del motor que se introduce en la fórmula dada, se deter-mina por la conocida cor¡elación:
Pg+aV,l/ :-" e 2701,
el motor trabajando el auto-que se anaIizan, CV;
combustible cotresPondientef uncionamiento del motor,
100
v-
(77)
f¿
I
I
Durante 1a explotación la calidad del camino, la carga delautomóvil y la velocidad de movimiento no son constantes. Porello, el motor del automóvil debe trabajar en diferentes regímenesde carga y velocidad.
El consumo específico de combustible g, depende del ¡endi-miento económico del motor, del automóvil, y del régimen de sufuncionamiento. El valor del consumo específico de combustiblevaría en un margen bastante amplio al cambiar la potencia y lafrecuencia de rotación del motor. Por consiguiente, e/ régimen de
funcionamiento del motor durante el moaimiento del automóailes LLn factor importante que influye en ia economía (consumo)de combustible.
Para determinar los consumos específicos de combustible g,,correspondientes a diferentes regímenes de trabajo del automóvil,puede utilizarse la grálica representacla en la fig.64. La grálicanos ofrece la característica de velocidad del motor, en la cualestán trazadas la curva de las potencias efectivas .A/", que desa-rrolla el motor al abrir compLetamerute la uciL'oula de mariposa,y una serie de cur\¡as de los consumos específicos de combustible
'E
i'f
r tt,
t),
tlf7+ t7g

7
Para relacionardel motor n. con la
:i.,rl":,!:r^:lfu,r,r se confeccionan según !os datos de las pruebasdel motor en el banco de ensavos.o oe ensayos.
en la gráfica dadaen la gráfica dada la frecuencia de rotaciónvelocidad de marcha tr/. baio el eip de ehenicaqtr/, bajo el eje de abscisas
Fig. 64. Gráfica para el cálculo de la ecenomía de combustibte de un automóvll
se trazan líneas inclinadascalas se elaboran basándose
I3l1_{j,; que corresponde. a-este .número de revoluciones. Se-guidamente calcuramod por ra fó¡mura tzii rri"t.*üiái'n-,oto,'lvr,-necesaria para el movimiento ¿el auiom¿,ril pn rao nnnáininnooI:,1t,.1.i1 r_iu,p
I f , e I movim i e.n t o. d el r rin"í ¿"J I'; j;:' ;";?i ¿i ;;;l
0,8 n /no
q8 lle/ilJ
V.alores de los coelicientesK" en la tórmula (78).
ser determinado por la tór-
9r: K' K" §r 1y¡, (7s)
prelijadas y hallamos. el. grado de c mo la rela.ción de-la potencia calculida N, a la M,, estable_cida más arriba. Conociendo el-núm s del motc¡y el grado de su carga hallamosen la curva respectivide los con-
sumo específ ico de combustiblepara el grado de carga analizadodel motor, interpolañ-ros las dos
por 100 km de recorrido.Para cálculos aproximados,
principalmente con fines de estu_dio, el valor de g,, gr/CV.h puedemula:
((
Ne
CV ((t(t(t(r(r(t(r(r
Fig. 65.K'Y
V
con las escales de conversión. Las es-en la correlación:
_ 0,377n^r,
it,
siendo getN¡:consumo especÍ[ico de combustibre con la potenciamáxima del motor, griCV.h;
K' y K": coeiicientes que tíeñ.n en óuenta respectivamentela va.riación d. g, en fun,:ión ¿. t, 1.r..rencia ¿erotación del motor y el grado du a, .;;g;.Los valores aproximados del coeficiente n,:f (ff), siendo
n.¿ la frecuencia de ¡otación der motor, r.p.fi., .on ií potenciamáxima, están dados en ta fig. 6t, a, y el coeficiente K" _, (#)
responde a los motores de car-
una de las cuales se refiereca mincl, ca racteriza das con el va
((((I(
I((
IfI3
IC
-nr,r./m, ¡'n,¡n
181

rlr
,/'¡
r_l
t\t,
ttl
rlo
ilú
rrD
rü
tf
r('(lucido de las resistencias del camino. Las curvas indican comor.rlnlbia el consumo de combustible para 100 km de recorrido arlifcrentes velocidades de movimiento para la marcha analizada,c¡r función de las condiciones del camino.
La curva inferior, trazada en la fig. 66 con línea de trazos,t:«rrresponde a la variante 9:0, cuando el automóvil va cuesta;rlrajo, cuyo valor í: f .Las curvas siguientes están trazadas para
t¡no*á60
0 t0 z0 J0 +0 S0 60 z0 s0 V kn/h
Fig. 66. Caracterlstica económica del automóvil.
caminos con diversos valores gradualmente en aumento del coefi-ciente rp.
Las'oelocidades mcixítr¿¿s de movimiento del automóvil, a me-dida de que. empeoran las condiciones del camino y crece el coefi-ciente rp, disminuye¡. Estas están limitadas por ia curva envol-vente a -a, la cual es el lugar geométrico dé los puntos, en loscuales el motor del autonlóviI consume la cantidad'máxima posi-ble de combustible con la respectiva frecuencia cle rotación,
La segunda curva c - c corr€sponde a los consumos raínintosde combustible para 100 l;m cle recorrido. Esta índica ras veloci-dades de movimiento más econónricas en diferentes condicionesdel camino, trabajando con la marcha dada. Las verocidades mrÍseconómicas son siempre tntis bajas que las aelocidades mdximasposibles.
Para esclarecer 1a influencia cie diversos factores en el trans-curso de las curvas de la caractcrística económica sustituiremosgn la fórmula _(76) en lugar de Ia potencia .A/" su valor de lalórmula (77). como resultaclo obtenemos la siguiente dependen-cta l
q.: 8"P,i,+rtr'' 100
- gsP¡+w
- lTTrñ,r" '-T-: r?m,,,,,.
182
S.".: 100 +,siendo 7t: capacidad del depósito de combustible, l.
I83

El consumo de combustible de diferentes aLrtomóviles es con-:niente compararlo por medio de /os consumos especif icos detmbustible en idénticas condiciones del camino. En calidad deLdice especí[ico, frecuentemente se toma el consumo de com-lstible en litros por tonelada - kilómetro según la ecuación:
Qoq: ¡¡d;.endo Gc. ú: peso de la carga útil, t.
Ei combustible, consumido por el automóvil, ptLede dividirser dos partes: una se gasta para el desplazamiento del automór,'ilrcío, y Ia segunda, para superar las resistencias relacionadasrn la utilización de sLr capacidad de carga. Cuanto mayor es largunda parte cn el consumo total de cornbustible, tanto más alto; el rendimiento económico del automóviI respecto al combLrstible.or ello, para la ecorlomía de combustible es muy importante latilizacíón racional de la capactdad de carga útil del automóaiL g' empleo de remolques.
La característica económica del aLrtomóvil no tiene en cuenta.numerables factores de explotación que ejercen inlluencla encho renciimiento económico. La característica indica los con-lmos de combustible únicamente a velocidades de movimiento)nstantes, mientras que en realidad la marcha transcurre a ve-,cidad frecuentemente variable, paradas, aceleraciones y frenado.na influencia sustancial en el rendimiento económico del auto-óvil respecto al combustible. lo ejerce su estado técnico. Los:sperIectos que alteran el funcionamiento normal del motor, que'iginan pérdidas adicionales de energía por el rozamiento en losecanismos del automóvil y el aumento de la resistencia a laarcha, y, como resultado, el gasto excesivo de combustible. Es:mbién de transcendencia la maestría del conductor. El trabajor los regÍmenes más racionales del motor, un consumo económico: energía para el frenado, una hábil utilización cle la marcha>r inercia en algunos tramos y otras medidas, pueden reducirrnsiderablemente el consumo de combustible. De acuercio conrservaciones existentes, el consumo de combustible varía en fun-ón de la experiencia y calificación del conductor en los límites¡ -l-6:770 del valor medio.
Las características económicas pueden servir principalmenterra la comparactón del rendimiento económico de dif erentesltomóviles respecto al combustible y el análisis de la influencial éste de diierentes elementos estructurales. Los cálculos de ex-otación se realizan basándose en las normas existentes de con-rmo de combustible, estipuladas conforme a las condiciones me-as de trabajo. Las normas están diferenciadas dependiendo det zona territorial, la marca del automóvil, el tiempo del año yras condiciones de explotación,
l4
§ 4. Dinámica de tracción del automóvilcon transmisión hidromecánica
- En lugar de las cajas mecánicas de cambio de marchas esca-lonadas, las transmisiones de automóviles en unu ráriu d. .rrottrans icasdrodin , ol
o, que ciónuno u dorrelaci tra
ticamente sin escalones, de acuerdocon el valor de las resistenciasexteriores al movimiento y per-mite efectuar suavemente la acele-r¿ción del automóvil sin inte-t'rumpir la transmisión de potenciaa las ruedas motrices al cambiarlas marchas. De esta manera, lautilización de transmisiones hidro-mecánicas ejerce una inf luenciasustancial en la dinámica delautomóvil.
La transmisión del par motoren el convertidor hidráulico sereal-iza aprovechando la energía I -¡- I
cinética del fluido que circula Fig. 67. Esquema de un converti-gn é.1 (aceite de poca viscosidad). - ''áo, hidráulicc de un escarón.
(7e)
(((((((((((((((((((((t((tI3
3
(
Mt: Ma * ü.uu",
siendo A'15, ill¡ Y fuIr.or: respecti\¡amente el pat motor de tabomba, la turbina y ei rcactor.
185
r]

D
ttI'tII
De la ecuación del convertidor hidráulico se desprende que,
como resultado de la existencia del par motor Mrio", creado porol reactor, tiene lugar la conaersión del par motor, transmitidodel árbol de la bom--ba al árbol de [a turbina. El surgimiento delmomento I{..^" está relacionado con el hecho de que las aletasdel reactor inmóvil cambian la dirección del flujo de aceite alvolver éste de la turbina a la bomba. Eligiendo la forma de lasaletas del reactor se consigue que el momento en el árbol de laturbina sea mayor que el momento de la bomba. De no haberreactor, o si el hismo tuviera la posibilidad de girar librementeen e[ flujo, la conversión del par motor no se produce y el conver-tidor hidráulico se transformaría en un ernbrague hidráulico.
El convertidor hidrául-ico se caracteriza por su coeficiente deconuerstón
,Mtnch:M
cuencia de rotación del árbol motriz (el árbol de la bomba) y elfluiclo operante que se tLtilíza. Estos se calculan por las fórmulas:
ful o: ?u ,\n?oD' ,
Mr: )";¡n2oD5,
(83)
siendo D: diámetro exterior de la cavidad de trabajo del con-verticlor hidráLrlico;
\,: densidad del iluido operante;l,i:coeficiente del momento primario del convertidor hi-
dr áu lico:l"r: coef lci.nt. ,t.t momento secundario del convertidor
hidráulico.Para cada tipo de convertidor hidráulico los coeficientes l,r
y 1,2 tienen sus valores, determinados -por vía. experimental.' Dividiendo la ecuación inierior (83) por Ia superior, obtene-mos:
M.\,¿:t't -;rL : tr,tk"¡.
tYtb
hiclráulico q. momento primario I'r'En la fi§ as las características adimen'
sionales de á es hidráulicos utilizados en los
áiLtomóviles: B, a) y transparente (f ig' 68, b)'
En ui.tu de que los valores del coeficiente fur son muy pequeños'
ü tu-.árr.te'rística ellos están trazados con un auménlo de 106
veces.Se denomina no transp dor d-e par hidráulico
en el cual la variación de otación y la carg.a de
i; ü.Üil; no e¡eicen influ en de f uncionamientoJL la Úorn¡a' La frecuenci I par motor se deter-
or0
{{ü,lt
wffilfitbrb
fiüt
El valor del coeficiente de conversión varía en función de lascondiciones de trabajo del automóvil, transcurriendo esto auto'tttáticamente, sin que el conductcr tome parte en ello. Cuando lasresistencias exteriores al movimiento se elevan, la velocidad delauto cuencia de rotación de la tur-bina frecuencia de rotación de laturb conversión. Este tiene el valormáx na está completamente frenado
del fluido en sus aletas. El carácter del cambio del valor delcoeficiente de conversión y su valor máximo dependen del tipo yestructura del convertidor hidráulico.
Se denomina relación de transmisión l.¡ del convertidor hi-dráulico la razón entre la frecuencia de rotación ¿t del árbol con-ducido (el árbol de la turbina) y la frecuencia de rotación n5 delárbol motriz (el árbol de la bomba), o sea
(80)
(Bl)
(82)
tbs([r
ts$sGüIo
. ,,|¿ch:
rh_..
El rendimiento del convertidor hidráulico
r"h: #:É"r,1"r,.Los valores de los pares motor de la bomba y la tLrrbina de-
penden del tipo de convertidor hidráLrlico, sus medidas, la fre-
186187

+,u
3,0
2,0
1,0
0
t\*l§-l(t:.l\§§§
mina en este caso únicamente por la posición de la válvula demariposa del carburador o Ia cremallera de la bomba de combus-tible y, estando éstos en una posición dada, quedan invariablesindependientemente del esfuerzo en el árbol de Ia turbina. En losconvertidores hidráulicos no transparentes el coeficiente del mo-mento primario i,r conserVa por toda la característica aproxima-damente un valor constante. Con el convertidor hidráulico no
transparente el motor queda ais-Tcl,% lado de la acción variable de loson factores extcrnos y no reaccionaÓu a las conrliciones ác movimienlo60 del auto¡nóvil.
La particularidad del con-vertidor hidráulico transparenteconsiste en que el régimen detlabajo del motor acoplado a
éste va¡ía al cambiar las car-gas en el árbol de la turbinay', de esta manera, depende delas condiciones de movimiento.En la característica a di¡nen-sional la transparencia deI con-vertidor hidráulico se manifies-ta en que el coeficiente delmomento primario 1"1 tiene paradiversas relaciones de trans-misión ícr, diierentes valores,como se muestra en la fig.68, b. Generalmente el conver-tidor hidrár-rlico está construidoele tal manera que al conser-varse invariable la posición deldispositivo regulador del sunli-nistro de combLrstible a los
cilinclros del moto¡-, la frecuencia de rotación del cigüeñal seelel,a al aumentar la velocidad del automór,iI y al disminLrirla velocidad se reduce. Gracias a esto, el Iuncionamiento delmotor con elevadas resistencias al movimiento se efectúa enla región de grandes parcs motor, mientras que a medida qLredisminul,en las resistencias pasa a la región de Irecuenciascle rotación elevadas, Lrtilizando correspondientemente mayorespotencias. Cono resLrltado, mej oran las cLraliclades clinámicasdel automóvi[. No obstante, las propiedades de conversión deconvettidores hidráulicos conirlues de tres ruedas de tipo t¡ans-parente son inferiores qLte en los convertidores hidráLrlicos notransparentes. El valor máximo del coeficiente de conversión delos p,rimeros, en la mayoría de los casos, es sólo un poco ma)'orque 2, mientras qLre en los convertidores hidráulicos ño transpa-
188
rentes se halla en los límites á"h,.á*:3 -:- 4. para elevar laspropiedades de conversión de los convertidores hidráulicos trans-parentes es preciso complicar considerablemente su estructura, enparticular-utilizar convertidores hidráuticos multietápicos, en' loscuales el fluido circula a través de varias turbinas dispuestas enserie.
El grado de transparencia del convertidor hiclráulico se suelecaracterizar por la relación del par motor de ta bomba, estandofrenada la turbina (i.n : 0), a -sLr par motor con un coelicientede conversión Écn: 1. De acuerdo con esto, el coeficlente cletransparencia del conr,'ertidor hidr áLllico
D -
¡lt 1,"n=o¡ 1,1,"6-n¡
^lu it"¡- r ¡ ¡,r 1É"¡.: r ¡
4tl,%
80
60
' q2 ry p,0 Q8 tc.ho
Caracterisiicas adimensionalesconvertidores hidráulicos:
((
((
(
(
(
+U
20
40
20
(84)
(t(1(l1tl1r(r(r(r(r(rla(rI
lr(r
Fg 68.de
Los convertidores hidráulicos se consideran prácticamente notransparentes si el coeIiciente de transparencia P < 1,2.
El electo principal de Ios convertidores hidrár_rlicos es su ren-dimiento relativamente pequeño. A causa de las grandes pérdidasde.energIa .para.\¡cncer las resistencias al movimiénto clel ilLr¡o dclfluido por las aletas de las ruedas y en otros sectores del circulode circulación, el rendimiento de los convertidores hidráulicos esmenor que el de las caj as de cambio de marchas mecánicas co-mLlnes. A pesar de los progresos logrados en los últimos años enel perfeccionamiento de la estructura de los convertidores hidráu-Iicos, el rendimiento má.ximo, incluso de los mejores, no excede el90-92fls, teniendo en cuenta clue el alto nivel
'de los valores del
rendimiento se conserva únicamente en un iniervalo limitado de
miento del automóvil. Este se realiza acoplando el árbol de tabonrba con el árbol de la tLLrbina con un-embrague especial debloqLrco de tipo corriente de fricción )', como resultado, el conver-tidor hidráulico se desembraga de Ia cadena de la transmisiónde fuerza del automóvil.
Para el mismo propósito se utilizan los asl ilamados conver-
c -no transparente; ó-transparente
\l-\ls
*ls-i:-l:-I<§-¡-§
rc;
Lt Ve.lt
\
W
\
189
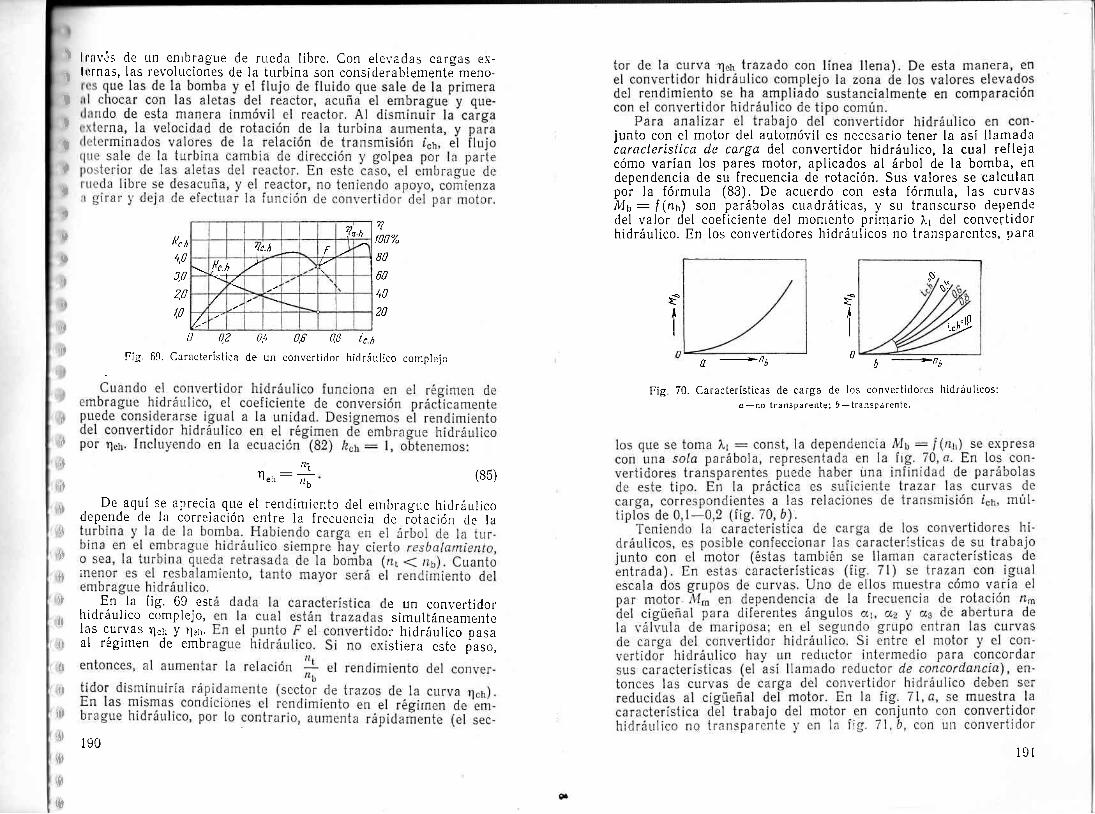
IIIII)II0
I.,
tl
Hc¡
4,0
J,0,n
l0
lravés de un enrbrague de rueda libre. Con elevadas cargas e\-trrrnas, las revoluciones de la turbina son considerablemente meno-
junto con el motor del automóvil es necesario tener Ia así llamadacaracterística de carga del convertidor hidráulico, la cual reflejacómo varían los pares motor, aplicados al á¡bol de la bomba, endependencia de su frecuencia de rotación. Sus valores se calculanpor la fórmula (83). De acuerdo con esta fórmula, las curvasM¡: f (n¡) son parábolas cuad¡'áticas, y su transcurso dependedel valor del coeficiente del montento primario i.r del convertidorhidráulico. En los convertidores hidráulicos no transparentes, para
§s)
(,,10Lcn-/
Fig. 70. Carac[erísticas de carga de
- b +ttb
los convertidores hidráulicos:
7,tan
4c.h F
lch///
Tt00%
BO
60
+0
2n
rf
rl
rl
rl
!f
it
1'
l,t
\t
+t
lt
lr
lt
h
¡t
rll
,lt
rll
'fl(0
t
\o
tLt q2 0! 0,6 0.8 ic h
. Fig 69. Característica de un convertido¡ hidráulico complejo
',I¡t
- -
¡ ell tt -,.b
. De.aquí se aprecia que el rendimiento del emb.ague hicrráLrlicodepende de la correlación entre la frecuencia de ótación cle la
En la [ig. 69 est e un convertidorhidráulico complejo, simultáneamentelas cur.vas lch ] rlerr. r hldráulico pasaal régimen de embr stiera este paso,
190
a-no transparentei á-transparente.
(85)
o
-nb
r9l

La f,uerza tangencial de tracción P,n se calcula
^ Mti.r¡. rl,f 6É"6i
^nm._,J: \
:_7r_,
y la velocidad de movimiento Y (.in.tener en.cuenta el patinajede las ruedas motrices) se calcula ior la ecuaclon:
,, _ 0,377rrn, 0,377rrnoi .n'imjmt (87)
siendo iro y rl*_, la relación de transmisión y el rendimiento res-pectivamente de la parte mecánica de la tiansmisión, clispuestaentre el convertidor hid¡áulico _'Ias ruedas motrices.' '
por la fórmula:
(86)
((
-n'L*Fig.7l. CaracterÍstica del trabajo conjunto del convertidor hidráulico con elrnotó r:
a-no transparente; g_lransparente.
ch P,lch
^C
fho'
K¿¡; tlr¡+0
-
V, tnfh
Fig.72. G¡á[ica para confeccionar la caracte¡ística de tración de un automóvilcon convertidor hid¡áulico no transparente.
s§
\EI
I
I
s§
*§{II
t(((((
(
((
((
(
(
((
(
(
((
((((
(
(
ttttttt
192193

(riales de tracción por la fórmula (86). Los resultados de los cál'culos están representados en forma gráiica con la curva gruesa!)ts f(V), dispuesta en el cuadrante derecho. La curva obtenida/'r*: f (lz) puede ser denominada característica de tracción deluulontóuil con convertidor hidráulico no transparente. En lugar«lc esta curva es posible, utilizando la conocida correlación
D -D!) -
' ts -' a , confeccionar una curva que caracterice la varia-"ución del factor dinámico del automóvil con transmisión hidrome-círnica en lunción de la velocidad de marcha.
La característica de tracción del aLrtomóvil con convertidorhidráulico transparente se elabora de forma aná[oga. La diferen-
cia reside en que con un con-vertidor hidráulico transparenteel motor f unciona en régimenvariable de velocidad, y, porello, la dependencia í.¡ : f (V)no tiene ca¡ácter lineal.
En la gráiica de la fig. 72,se aprecia que a I régimenmás económico de trabajo delconvertidor hid¡áulico corres-ponde una gama limitada develocidades de movimiento delar-rtomóvil. Para ampliarla, elconvertidor hidráulico siemprese utiliza en Ltna u otra combi-nación con una ca ja de cam-bios mecánica, que generalmen-te está montada después deést e.
de Ia transmisíón mecánica desmultiplicaclora a 1a directa, y enel sector III la transmisión funciona en el régirnen de embragLrehidráulico - marcha directa.
En la caracteristica de tracción dada, además de Ia curvaPw: f (7) , están trazadas las curvas Í6 ! rlcrrr la primera de lascuáles muestra cómo varía en dilerentes etapas de la marcha delautomóvil la frecuencia de rotación del motor, y la segunda, comocambia con ello el rendimiento del convertidor hidráulico.
Los convertidores hidráulicos encuentran tarnbién aplicaciónen los tractores, principalmente en los de tipo industria[, desti-nados a realizar trabajos en cantinos, obras de construcción I'otros en los que la variación del régimen de tracción es brusca.En estas concliciones, el trabajo aLrtomático del con.¿ertidor hidrátt-lico es una ventaja preponderante que contribLrye a la mejoraciónde los índices de explotación del conjunto tractor. En los tractoresagrícolas las em útnicos. Sin em-bargo, a raíz as los tractores lasventajas de I hi relacionadas conla facilitación )' con las marchas,eI mejoramiento cle las condiciones de trabajo clel condLrctor, ladisminLrción de las cargas dinámicas en el motor, la transmisióny otros mecanistnos del tractor, adqLrieren tanlbién ltn
"'alor con-
siderable para tractoi:es agrícolas.
§ 5. Cálculo de tracción del automóvil
En las condiciones del sistema socialista de la economía na-cional, las tendencias y las vías principales de desarrcllo en laconstrucción de automóviles se determinan adoptando para la[abricación y explotación los tipos de automóviles cle mayor pers-pectiva. De acuerdo con esto, las tareas del cálculo de tracciónresiden en determinar los parámetros del automóvil, qLre asegLrren1a obtención de los índices de tracción y dinámicos especificadospara él según la nomenclatura de tipos y satisfagan las concli-ciones de explotación en las cuales el automór'iI tendrá que tra-bajar.
En la agricultura los automór,i1es se utilizan para el trans-porte dentro de la hacienda y fuera de ella y en Lrna serie de casosentran en el conjtLnto tecnológico de máquinas que realiza uno ,-r
otro proceso de producción en 1a agricultura. Dicho conjuntotiene que trabaj ar en las más diversas condiciones, incluyendocaminos en mal estado y en ausencia de éstos. Esto determinalas eLeuadas exigencias a la traficabilidad de los atdontót,íles q asus cualidacLes dindm[cas g cle tracción. Frecuentemente la capa-cidad de carga dcl auton-róvil se diversiiica en íui-rción de las con-cliciones de explotación. En camiuos de tierra y especialmente a
campotraviesa ésta se redltce en comparación con la capacidadde carga estipLrlada para caminos pavimentados. A[ transportar
v' v"nYFig. 73. Caracteristica de tracción deun automóvil con un convertidor hidrá-ulico complejo que trabaja junto conuna caja de cambio de marchas de dos
escalones.
It'
ll I
lrl
!l t
Conociendo el esquema de la trarLsmisión hidromecánica y laregularidad establecida para el cambio sltcesivo dc un régimen a
otro, puede conleccionarse la caracterlstica de tracción deI auto-móvil para todas las etapas de [uncionamiento de la transmisión.Como ejemplo, en la Iig. 73 está representada la característicade tracción de un automóvil con convertidor de tipo transparentc,que trabaja según el csquema convertidor hidrár-rlico - embraguehidráulico en combinación con una caja de cambio mccánica dedos escalones, que tiene marchas desmultiplicadora y dirccta. Enla característlca sc dcstacan tres scctores. En el scctor /, corres-pondiente a la ctapa inicial de aceleración clel automót,i[, el cotr-vertidor hidráLrlico trabaja junto con la transmisión ntecánicaclesmultiplicaclora. Después de alcanzar el automóvil Ia velocidadV' el convertidcr hidráulico pasa al régimen de embrague hidráu-lico, y en el sector /1 continúra trabaj ando con la misma transmi-sión mecánica desmultiplicadora. En lo sllcesivo, al aumentar Iavelocidad de triovirnicnto hasta el valor ll", se procl ttce el cambio
t9+ 195

t(tt(t(tttttttttttttttttttte
e
e
ttttt
t1JY T
dinámicos y econó.micos der a,tomóvir: cLr anto mayor es éste,tanto mejores son Ios índices. por esta razón, al dise'ñar él auto-móvil es necesar r el coeficir'nl, iiiái'rrldod d,carga, hasta [a ..u posibl. tOcnicunilntu y ,r-cional desde el p nómicó.
EI valor dei :apacidad de carga depende deltipo y las particularidades estructurares del autoñr¿vii.'para lossmo éste se hal 0,25_0,.1;
cilindrada del nor es sucidad de carga el coefi-de carga es co or que cnaumentar la ca te. Én los
pleo general Ic : 0,9 + l,l.iles de alta traficabilidad, el
es menor que para los automó-
a res istencia del aire p*,ná":haFv2nt<
^ | -t: -- . Al determinar el valor de pr,,,á.r, el coef iciente
[,1,y (Go * G"r.) * P,,,,¡*] [*¡*270q1.
aerodinámico k* y la sLrperf iciepartiendo de una previa compo-sición de esbozos o por analo-gía con automóviles existentesde tipo similar.
La fig. 74 nos presta en for-ma gráfica el balance de po-tencia de un automóvil óonmovimiento estacionario y lamarcha superior. En la gráiicaestán trazadas dos curuias: lacurva de la potencia .M,, desa-rrollada por el rnotor con plenosuministro de combustible, re-presentada eu función de lavelociclad del aLrtomóvil con la
frontal del ar-rtomóvil F se eligen
VFig i.l. Baianec e poteacia tJe un
aulo:ór il con I¡ riiarclra superior.
' (88)
iiendo Go:O.nr:
D-' ru,náx -
peso propio del automóvil, kgf;capacidad de carga del ar_rtoñrór,il, kgl;resistencia del aire durante la marc"ha a la velociclaclmáxima, kgf;
I/máx: velocida.En la. capacidad o se
ncluye el peso de lor.i éáriprÉ. p"ir; ,, ffi:lel peso.nominal establecido de con_luctor y los pasajeros en la cabina.
Para utilizar la fó¡m.ula..expuesja es necesario estipLrrar eleso propio del aLrtomóvil, eligiéndolo de acuerdo con la'-apaci-iad de carga preesiablecida. L1 dependencia entre ellos ie-carac-
eriza por la relación ro:+:, qlre se clenomina coeficiente deapacíd,ad de carga del autotttóail. El valc¡r clel coef icierrte de ca-acidad de carga ejerce una influencia sustancial en los inaices
96
marcha a curva de 1a potencia ff,1*
exigida a vencer las resistencias al moautomóv a diferentes velocidacles en lasdel cam para el cálculo. Al punto dede estas sponde en el eie de ibscisasmáxima del arriomóvil 7n,¡".
. - El punto l/y puede hall del motoren di[erentes. posiciones. En la punto estádispuesto a la derecha del pu ma N"^r_,Tal disposición del punto Ny s e para ióiautomóviles con poca potencia e áisponer
197

rlr,rnalot€S reservas de poterrcia marchanclo el automóvil a velo-t:idades medias.
Para los automóviles de grandes velocidades, particularmente¡lrrra los deportivos y los de carrera, es importante tener lasr¡layores reservas de potencia al desplazarse a velocidades máxi-ruas. Por consiguiente, para éstos el punto Nv debe coincidir enla caracterÍstica del motor con el punto ilr.r*. Para los camiones,t:uyos motores cstán dotados de limitadores de la frecuencia má-xima de rotación, el punto Ny se dispone en la característica delrnotor a la izquierda del punto M"*n* y debe coincidir con el
¡runto ly'!,,,r.*, cortado por el limitador (fig. a). Con esta disposi-ción del punto rVv la velocidad máxima del automór,'il correspondea Ia frecuencia de rotación con qlle se pone en funcionamiento ellimitador y la potencia máxima reatmente utilizada del motoriV',.¿* - Nv es menor que la potencia máxima del motor en lacaracterística de velocidad exterior.
Además de la potencia máxima necesaria, del motor del aLrto-móvi1 se exige también una suficiente capacidad para superar lassobrecargas. Para que cualquie¡ anmento temporal de las resisten-cias al movimiento no exija el cambio de la marcha, el factor di-námico mdxímo, desarrollado por el automór,il con una u otramarcha, debe ser mayor que ei factor dinámico del automóvil a lavelocidad máxima de movimiento con la misma marcha. EI factordinámico alcanza su mayor valor f uncionando el motor con el parmotor máximo, cuando la fuerza tangencial de tracción del auto-móvil tiene el valor máxímo y la resistencia del aire es mÍnima.Por esto, al elegir el motor para un automóvil, es necesario preverque éste tenga una suficiente reserva de adaptación según el mo-mento.
Conociendo el peso total del automóvil G y una veznada Ia potencia má.rima de su motor Nr*r*, es posiblela potencia es¡secífica del automói'il N.ro por la férmula:
l\,¿,n á *
.v esp G
El valor de la potencia específica en cierta medida caracterizalas cualidades dinámicas del aLrtomóvil. Para los automóviles deturismo il.sp : 40 -: 60 CV/t, y en algunos casos es aún mayor.Las potencias específicas de los camiones sor considerablementernenores y en término medio se hallan en los límites de 20 .
+ 25 CV/t.Durante los cálcLrlos de tracción del automóviI se determina el
ualor mdxínto del f actor dirud.mico con la printera marcha Di ,ná*.Este se elige partiendo de las posibilidades de adherencia delautomóvil y se realiza aplicando a las r-Lredas mot¡ices el parmotor del valor correspondiente. Para utilizar plenamente lascualidades de adherencia del automóvil, el factor dinámico má-
198
ximo D¡ *6* debe ser igual al facto¡ dinámico de adherencia D*.Adoptando el valor de este último para los automóviles con rue-das motrices traseras según la fórmula (72a) y despreciando laresistencia del aire, la cual durante cl movimiento a pequeñasvelocidades es insignificante, obtenemos:
Dr*á*: Ql.. (90)
El coeficiente de adherencia q y el coeficiente de carga de lasruedas traseras 1,., que entran en esta ecuación se toman:q:0,5+0,7, y ),r:(l,l -:- 1,3)1,r..,, siendo lr".t el valor del coe-Iiciente de carga de las ruedas traseras cuando el automóvilestá parado en terreno horizontal; el factor l,l + 1,3 tiene er-r
cuenta Ia redistribución de las cargas entre las ruedas delanterasy traseras del automóviI durante Ia marcha.
Para los automóviles del tipo 4Y.2 el valo¡ Dr .á* se hallaen los límites de 0,25-0,4 para los vehículos de turismo y 0,32-0,5 para los camiones.
La siguiente tarea del cálculo de tracción es la elección de lqsmarchas del automóull. Comencemos por determinar la relaciónde reducción ls de la transmisión principal. Si el automóvil debedesarrolar la velocidad máxima I/n¡x corl la marcha directa, en-tonces:
oBTTr-n,,,o: _T*j_. (91)
La frecuencia de rotación del motor nv que entra en esta fór-mula, correspondiente a la velocidad máxima, se toma según lacaracterística del motor, elegido de acuerdo a las consideracionesarriba expuestas. Las dimensiones de las ruedas y su radio r. sedeterminan durante la composición del automóvil, partíendo delas cargas que éstos perciben, utilizando los datos informativospara los neumáticos. El radio rr convencionalmente se adoptacomo una magnitud constante, igual al radio estático de las rue-das.
En las modificaciones de elevada traficabilidad la relaciónde reducción is se establece un l0-20/e mayor que en los lnodelosbásicos de empleo general, para que a cuenta de cierta reducciónde las velocidades de movimiento elevar el valor del factor diná-mico con la marcha directa. Por las misrnas consideraciones puedetambién resultar ser racional la eleuaci.ón de la relación de re-diLcción de la transmísión principal en los automóaíles de empleogeneraL destinacl.os a trabcLjar,eru la agricultura.
Segttidamente cleterminaremos la relación de reducción r.1 delprinter escalón de la caja de cambio de marchas. Partiendo de lacondición de obtener el valor máximo necesario del iactor diná-mico Dr,n¡* del automór'il, tenemos la dependencia siguiente:
_ ,ll ^_ , .
j" t iort,
,lul::á:(--- ,'tv
determi-calcu I ar
(Be)
199

0,377rrn, 0,3T7rrn,-lrr'* : -6¿;;'
de donde
iendo h1
ie (.,c- l) n2
-¿-- : n, '
Teniendo en cuenta la premisa aioptada de quelarchas eI campo de las frecuencias de rotación¡ua[, escribimos la correlación antericr en la
lo que presupone la confección de Ia serie de marchas según elprincipio de la progrestón geométrica. La razól de la progresiónse determina por la fórmula:
,-t l7:-s: N'ff , (e3)
siendo z: número de escalones en la caja de cambio de mar-chas;
i"t ! icz: relaciones de reducción de la caj a con las marchasprimera y superior.
En caso particular, cuando la marcha superior es directa:
(e3a)
El transcurso del proceso dehacer uso de la serie geoméiricagráfica de la Iig. 75. Esta nos pre-senta la caracterísiica de veloci-dad de un motor de automóvilen la cual, además de la curvaN": f(n^), están trazados unaserie de rayos, que representanIa dependencia entre la velocidaddel automóvil V y la frecuenciade rotación del motor durante elmovimiento con diferentes mar-chas. Los números de éstas estánirrdicados con números romanos,dispr-restos junto a los rayos. Lospuntos de intersección de cadapar de rayos contiguos con lasverticáles, que corresponden a lairecuencia de rotación del motorn.2 para la marcha anterior, y laIrecuencia de rotación del motorn1 para 1a marcha siguiente, se disponen en las rectas paralelasal eje de abscisas, ya que en los puntos de transición de unamarcha a otra las velocidades del automóvil deben ser iguales.Los sectores de los rayos, en los que transcurre el movimientodel automóvil durante la aceleración, están trazados con líneasgruesas. inicialmente el automóvil avanza con la primera mar-cha, en el punto a pasa a la segunda, en el punto ó a la ter-cera, etc.
En realidad, al cambiar las marchas durante cierto tiempo elmovimiento transcurre por inercia y, como resultado, 1a velocidaddel automóvil se reduce. Cuanto mayor es la velocidad, tanto másintensa es su disminución. Por ello, al corregir definitivamenteIas relaciones de reducción se recomienda apartarse un tanto del
20t
(e2)
con todas las13- ,leb. =",!11
l-4:NL"t
((((((((((((((((((((((IIaeoe(3
Ne
aceleración del automóvil, alde marchas, se ilustra en la
nt nz nn
Fig 75. Gráfico de marcha de unautomóvil du¡ante la aceleración enel crso de utilizar una serie geo-
métrica de marchas.lL2
De laucción
00
: consi.
forma siguiente:
C

l)rircipio de.la progresión geométrica y disnlinuir la correlación.,trr'Ias relaciones de reducción a medida que se pasa a laslllirrchas superiores, para que
/"t - i": -
-2-)lcz lca
i c(z- tlir" (s4)
motor y la transmisión se deben calentar y en el proceso de losensayos se observa su estado térmico. El combustible y los mate-riales lubricantes deben corresponder a las indicaciones de lasinstrucciones de la fábrica y satisfacer a las exigencias de laestación del año.
Para evaluar las cualidades dinámicas del automóvil se midenlos índices siguientes: a) la velocidad máxima y mínima de mo-vimiento; b) el recorrido y el tiempo de rodadura libre del auto-móvil; c) los índices de tracción necesarios para confeccionar lacaracterística dinámica; d) el recorrido, el tiempo y la intensidadde aceleración; e) el recorrido, el tiempo y la intensidad de fre-nado.
La aelocidad mdxima del automóvil se determina en movi-miento estacionario por un camino plano, recto, horizontal, de lacalidad necesaria, con tiempo seco y sin viento. El automóvil seensaya con la marcha directa, con la carga útil nominal para élestablecida, y también, en ciertos casos, sin carga. El sector decontrol debe ser de I km de longitud; por ambos lados de éstese dejan sectores de acceso de uno a tres kilómetros cada uno. Lalongitud de dichos sectores debe ser suficiente para que la veloci-dad requerida sea lograda a 200-300 m (dependiendo del valorde la velocidad) antes del comienzo del sector de control. Eltiempo de recorrido de este sector se controla con un cuentase-gundos. Para excluir la influencia del viento y de posibles pe-queñas rampas del camino, el sector de control se recorre en dosdirecciones opuestas.
La velocidad máxima btrscada I/66¡ se calcula por la fórmula:
Y.r*:T,siendo S: longitud del sector de control, m;
I : tiempo medio de ambos ensayos en qlle se reco¡re elsector de control, s.
La uelocidad mínima estable de mo.¡imiento se determina conla marcha directa. Su valor se establece realizando varios reco-rridos de prueba en sectores de 100 m de longitud, dispuestosuno tras otro a una distancia de 200-300 m. Después de cada re-corrido se rednce la velocidad hasta el momento cuando el motorse ,ahogue y, en lo sucesivo, el movimlento es imposible. La velo-cidad buscada se deterrnina por el tiempo en que se recorren lossectores de control, que se registra con Ltn cuentasegundos. Losensayos se repiten clurante e1 movimiento en dirección contraria.
El recorrído de rodadura llbre del automóvil tiene Lln valorconsiderable, ya que durante la explotación 1a marcha con iatransmisión desacoplada del motor se utiliza frecuentemente. Eltiempo y el recorriclo de la rodadura libre se miden para dosvalores de la velocidad inicial: Ia máxima posible para el auto-móvil dado y 50 l<m/h; la velocidad inicial debe adquirir un ca-
§ 6. Investigación experimental de la clinámicade tracción y del consumode combustible del automóvil
Antes de los ensayo-s el automóvil clebe pasar el rodaje regla-mentario; se debe verificar minuciosamente^su estado tétnicoj el
202 203

Los ensayos para Cetermina r el recor¡idorodadura libre del automóvil se realizan en unllano, horizontal con pavimento liso y duro.
Los índices de tracción del auiomóvil sezando mediciones dinamométricas, remolcando
Uno de los medios r¡ mo tiempo, suficiente-mente prácticos. para d es de aleieración, eshacer en el camino mar intervalos de tieápo,que indican la posición diendo sucesivameñtela.longitud de los sectores entre dos marcas contiguas, se puedeestablecer cómo crece la velocirlad media cie movimiento én di-versos sectores en el transcurso de la aceleración y qué caminorecorre el automóvil, hasia qug !a velocidad alcanzá ei valor queconvencionalmente determina el final de la aceleración.
presión excesiva de 3-4 kgf/cm3, gracias a lo que el líquido seemerge de la tobera a gran velocidad en torma de uá f uertechorro, que ha.ce una marca nítida sobie la superficie der camino.
La inversión de trabajo para determinar lós índices de acele-ración puede ser considerablemente reducida al elevarse Ia e.xacti-tud de los datos obtenidos, utilizando instrumentos registradores,que controlen diversas magnitudes, Ias cuales caraiterizan eitranscurso de la aceleración.
T
(tt(f(ttttt((tt((t(t(((((a
rl
1a
,l
0r¡
,l
¡
desde donde
el embragrreinvestiga dor
de ca.rga .de uno u otro tipo.El balance de tracci6n
dinamométricas a velocidadtiene la forma síguiente:
del automóvil durante las medicionesestacionaria por un camino horizontal
PB,: Pgun * P¡* P*.
las indicaciones del dinamómetro Ia f uerzaposible hallar el factor dinámico del auto-
P J-p"^
gan ' '¡G
04205
Er3

z.ando los mismos métodos y medios de medida que se empleanaI analizar la aceleración. Los índices de frenaáo se verifican¡rara di[erentes valores de las velocidades iniciales de movimiento.lin algunos casos también se realizan ensayos de frenado dellutomóvil con el motor sin utilizar los frenos. La eficacia del[reno de mano se determina estacionanrio el automóvil en rampaso declives de inclinación determinada y comprobando la posibili-dad de que quede con seguridad inmóvil, cón el freno de manoapreta do.
En calidad de índices generalizados de las cualidades dinámi-cas del automór,il, que reflejan las condiciones externas de larnarcha y la adaptación a las mismas de la estructura del auto-móvil, pueden servir las oeloctdades técntcas medias de mouí-
velocidades medias buscadas se determinan dividiendo el caminorecorrido en kilómetros por el tiempo de movimiento en horas; eneste caso no se tiene en cuenta el tiempo invertido en las para-das-, excluyendo aquellas que son motivadas por la regulacióh deltráfico.
Las carscterísiicas econótnicas del automóvil se registran conla marcha directa, y al ensayar nue\¡os modelos se rJalizan contodas las marchas. Para registrar la ca¡acteiística económica seeligen varios sectores rectil:neos, horizontales del camino, de unalongitud no menor de 1000 m cada uno con diferentes resistenciasal movimiento; en cada sector la resistencia debe ser constante.
mantiene Ia velocidad prefijada de mor,,imiento, orientándose porel velocínletro y, si es necesario, debe accionar con cuidado sobree1 pedaI de suministro de combustible. El consumo de combustiblese determina mediante depósitos de control de una u otra estruc-tura montados entre el depósito y la bomba de combustible. Al
combustible para. tres.variantes cie carga; con la caj a vacia, conla carga nominal en la plataforma sin remolque 1'óon el remol-que, cargado hasta el lÍrnite establecido para-el inismo. El con-
206
surno de com[¡Lrstible para otras variantes de utilización de la ca-pacidad de carga .del .a.utomóvil pLrede ser deter¡ninado interpo-lando los valores obtenidos.
En aquellos casos cuando _no sea posible hallar para los en-sayos una serie de sectores del camino con diferenies resisten-cias, pueden ser imítadas dioersas resístencias del camíno ua-riando el peso de la carga del automóuil, ya que el consumo decombustible en igual medida depende de tos dos factores mencio-nados. Una vez determinado el consumo de combustible e¡l el
bustib eso G/, puede considerarse, con sufi-ciente práctico§, igr-ral al consumo de conr-bustib omór,il con carga completa por uncamin resistencia redLrcido tiene ei valorconvencional:
.G'll).on : tI,-¿ '
Hay veces que, en lugar de registiar la característica econó-mica, se limitan a medir el consumo de combustible de control
Para evaluar las cualidades de expiotación del automóvil, unvalor importante tiene la determinación de sus índices dinámicosde tracción y -económicos por caminos malos y a campotraviesa.Los ensayos de los automóviles en las condiiiones méncionadasse denominan ensallos de la traficabilidad. Más detalladamenteesto se tratará más abajo, en el capítLrlo respectivo.
Durante los ensayos del autcmóvil se deben tomar todas lasmedidas per.tinentes de prevención para garantizar la seguridacldel personal, y la conservación de los vehículos. Antes-de los
I
207

EJE\IPLOS DE CALCULO
. Ejerrrplo l. Se requiere realizar el cálr:ulo de tracción de un camión y de[er-mrnar sus paránretros orincipales: el peso, t. p"i¿ñ;i;á.i'd;iü';i",Jalor má-á li::.f,..!
fácatfhdin á mi¡o y'l a s,u r á.iáné,' d'; i. d ;;;ió, ;. I á" iilr,-, r!io, p. *
G-^- 3500c, : l:. : -ii- = 8200 ksf.
La potencia requerida del motor se deterrnina por la iórmula (gg):
Po¡ otro lado, de acuerdo con la ecuación (g2),
^ &l*.r"/t. ltlrr rurrnáx:]rc;-r-6J,
de donde
. Dt^n* (oo * G"u.) ',¿tr I : -;f;;il;--.EI par motor máximo
M^^u* : n*!6'l!-u- : r,r "u;;;o"o * 28,88 kgr . m.
Teniendo el valor D,*á* y M,n.á* y adoptando el rendimiento de latransmisión en primera rl1.¡ : 0,9, o¡iüüemos:
¿,,, : !iE-(W o,1x * 44,8;26,85 . 0,9
respectivamente la reración de reducción de la caja con la primera marcha
. it. | 44,3¡c¡:-I-:E,g-t o6,4.
Previamente se erigen ras relaciones de reducción de ra transmÍsión creacucrdo rr princioio ai t.a progreiilñ"!i"riotri...-Lá"rün''a."iá"pligr..ionse determina' por ia fórrnul, igáii
--'v¡r 5!v¡r¡Lr¡ r'!
q: 1/i :'i't4 = t,86.En los automóvires se. recomienrra apartarse un tanto de la serie georné-trica v disminuir Ias .orr.tu,]iáiiár-;;ir.".í;;'?;rrciones rre reducción a rnedi,aque se pasa a núrneros rnás etevados dá i;; ;;;¡¿iüi.-o. ,ii,üi.itn".rt, ,._comendación, tenemos:
- _ i"tgr :+- :2,0. q.:+i : t,O; +r: f : I,Z,
d. .fr;t,i: iT"i|""iÍi,rlSnsisuiente serie de relaciones de reducción de ta caja
Relación de reducción r.le la cajade cambios
C
((_
lI
ft
It:
ils
áli?
fi
tI.
H§i
fi'ü.lil
F,
Il
Htr
T
[tu (co * o"u.) * P,*6*] Y*a* aU
(
((
((tt(((((((((((t((ttttt
Previamcnte se carcura. el valor de Ia Iuerza de resistencia der aire a Iavelocidad máxima de movimiento p*r., quJ .nt* en esta fórmula. por laecuación (12, a):
pr¿,,náx: fup- 0'05'3'6'752 = 78 kgf.
Tomando el coeficiente.reducido de resistencia der camino rpv :0,04, y elrendimiento de Ia transmisión ión-pre-n;;;;;; der motor con'marcha directaI¡r : 0,96, tenemos:
,r, _ [0,04 (3200 + 35oo) + 781 75¡vv-E=l00cV.En la característica de velociclad exte¡na der moto¡ cl valor de Ia poten-cia obtenido debe disoone^. .n "f pü¡;";ü.- corta er rimitador del númeromáximo de revolucionei.
__,_^?_.^,1, fórmula (91) se deduce que la relación de redución de la marchapfrnclpa I
. _ O,B77rrnu 0,572.0.4A .8200''__-7;;:_----_75-_:t''ú2.
. La^ primera m-archa debe asegurar la realización der factor dinámico má.ximo D¡,n¿* posible, según ras .dnái.ion.r'¡;";¿h;;¿";i; á.-rá. .réá'á'J ,"t.i-i.?jr".t
el camino' Por la ecuación (g0) para automóvires con ruedas motrices
Drn,á* : gl..
,., ,lsff.tT:3.f1.'i:t:'dii,ii,'"0"x';:?,'' e :0'5 v er coef iciente de carga deLa correción definitiva de las relacio n debe ser efectuada aldetcrminarse el número d..li;n'ü ;; fo; la transrnisión.Ejemplo 2. Se reouíere.oniu..i*ir- clinánlica unive¡sal deu¡ carnión y deterrninhr pur eltz, con'qlié ¿esplazarse el automó-vrl en condiciones deterrilinadas Ael cim con,la carga completa
Relación de rcducción de la tr.ans-m is ión
208
Dt,náx : 0,5' 0,75 : 0,375.
E19
209

llnremolqunremolque;qttéveloci'dtrles mái so'
Datos s c : 2800 -kgf; Peso con
Gorga com C,"m : 4200- kgl; el au-
lonüuiL .. potencia máxima Mrnrá*:
n,olnv o'2
Nr'Nn . 0,2
el automóvil Y el remolque."' * gi liiii,dr lugar deüiminaremos los datos-necesarios oara elaborar la ca'
,..t#irti.á"¿-i;átrü d;i-;;i;;¡;ii-iin-óuigo. En este caso, el factor dinámico
D -D^ .ts ,wu__d_
LafuerzatangencialdetracciónPtg,kgt'delautomóvilsecalculaporla[órmula:
o _270N,"\tc'tg- V
y Ia resistencia del aire P,, kgf, por la fórmula:
^ k*Fv2rr: __I{.
Lavelocidaddemarchalz'km/h,qtteentraenestaiórmulasecietermina'.onr'ial.olJó-qré Lu. ruedas no patinan,'por Ia fórmula:
-- 0,377rrn^t/
-
-
jt.
Basándonos en los datos iniciales existentes y las fórmulas indicadas cal-
culamos las siguientes "i^g.iir?""t';,...iá¡át paia confeccionar 1a caL'acterís-
[ica dinámica dél automóvil:
N; - f (r¡,,); tr/: I (n,,, í1,); P.*: I('t. n; p.: l(V); D: f (i1,' tr/)'
f -
É,
210
9\ nor una serie de Duntos, tomados en el eje de ordenadas, se trazan rec-
tas iTclinadas de tal forma que las o¡denadas de.los puntos de su interseccton
."n'i, u.rti.ul que pasa a trávés de /' : 2, sean dos veces mayores que las or's.do a la segunda pregunta del problema, estableceremos previa'et automólil vac[o el coe[iciente de carga f: l; para el auto-
f :e:#3$:',para el autotrén
¡ - G"o'j G'"' : uuoo-I-o'oo : r,uGr" 2800
Seguidamente irazamos en el eje .de.ordenadas de Ia caracteristica un seg-
mento oue reoresenta .;'l; ;;.;lr'áaóptaau para el factor dinámico, el .'alor
determinado del coeÍiciente r!. Por el vér-
0,4
0,5
0,6 0,8 1,0
0,73 0,92 1,0
tI
I
iautotrén) la linea horizontal lrazada Fie. 76. Curvas de la caracteris-druza la
'curva del lactor dinámico en tiiá económica de combustible dcltercera marcha, en el punto correspon' automóvil (para el jemplo 3 deldiente a la velocidad V :40 km/h; en c'apítulo V).este caso, el trabajo con Ia marcha di'
urvas de la caracteristica combustible-movimiento conllano, en el cualcurvas trazadasy más económi-
t"' Or,o, iniciales: peso del automóvil sin carga Gs c :4500 kgf' con carga
comolcta G"o. : 8500 kgi;'" ""i;t";i¿uif "i[i dolado dc un motor de carburador de potencia.máxima
,v .' : Ñ,,:'isó-CV, desarrollada con nv:3200 r' p' m'; la disposlción dc¿rnax t -
fu" .irir^ de la potencia e[ectiva en la caracteristica de velocidad exterior se
lencia luncion ^t #:, (3;), expuesta en el ejertr-
,,v
plo anterior; el motor funciona con gasolina cuya densidad V=-0'75 hg/l;
81 2ll
JO 50607000a

la relación de reducción de la transmisión con la primera marcha ir'
- io : 6,45; el rendimiento de [a transmisión tiene, depéndiendo del gradocarga del motol , un valol'
/ 0,03N; \rtr:0,94\t- ¡v, ),siendo tV, : potencia necesaria del nrotor, para la marcha del automóvil en las
condiciones analizadas, y Ni: potencia del motor con el número de revolucio'nes respectivo en la característica exterior; radio calculado de las ruedas r, :: 0,45 ml
la super[icie trontal del automóvil F :4,2 m2t coe[iciente aerodinámicoÉ" : 0,06 kgf ' s2/rrr{;'
el consümo eipecítico de combustible para la poten.cia máxinra. deI motot
Ee^,:210 grlCV .'h; la inf luencia en el cónsumo éspeciIico de coml¡ustible de
loé'regimenes de velocida, y carga del funcionam;onto del motor se ti"ne en
ffi J:ft"',"ffi,,á,Li"dr,:c'{[,Ét-lfuJi{{ifi.'Jicarg ' 8500 : 297'5 kgi.
Seguidamente tomamos una serie de va'tcres 49, qr. caracterizan el ré-
gimen de velocidad de funcionamiento del 'eterminamos las magnitu'3es siguientes, correspondientes a cada un s, necesarias para calcularla ecoñomÍa (consumo) de combustible del :
l) ns r. p. m, del motor; 2) potencia del motor N'r, CV, en la caracterfs'
tica de velocidad exterior; 3) veiocidad de marcha del atrtomóvil 7:
- 0'377:'n'n
o^,n', resistencia del aire Pt : htÜt kgf; 4)ls
Capítulo VI
Dinámica de trenadode tractores, automóviles,
trenes de tractoresy automóviles
§ l. Ecuación de movimiento durante el irenado.- Indices de las cualidades de frenado
creando adicionalrtente resistencias artificiales al movimiento.El propósito del frenado al marchar cuesta abajo es absorber
la eneigía potenclaL del vehículo desa¡-rollada en este caso.El fienado del vehículo estacionadc debe asegurar Ia conser'
vación de su posición en cualesquiera subidas o bajadas.La fuente principal de resistencias adicionales al movimiento
es el sistema'de fienos instalado en el vehículo, mediante loscuales se crean momentos de frotamiento que impiden el giro de
las ruedas. La energ[a del vehículo se consume en e[ trabajo de
frotamiento de los fienos, o si los frenos están apretados hasta eltope y el vehículo avanza «patinando>>, entoncesentre-los neumáticos (orugas) y el camino; el
miento se convierte en calor, qtte se disipa porcundante. En calidad de medio de [renado tam
las resistencias del camino y del aire, que también ejercen in'fluencia en Ia reducción de la velocidad.
de
tt.t.t,
tt((
t(
(Pf + P0) v270r1¡,
potencia del
CV; 5) grado
ttt((((
motor necesaria para
de carga del moto¡
la marcha del autornóvil, N, :
4' II
tUna vez establecidos los regínrenes de velocidad (tr)
(#)de runcionamiento del motor a diferentes velocidades de
cada una dela fórmula
y de carga
marcha del
las variantes(78) :
(((
automóvil, con carga y sin carga, determinamos parael consumo especi[1co de cornbustible del motor por
g u: K' K" g o1¡g¡ er/CV ' h
v el valor del consumo fle combustible por 100 km de recorrido, por [a fórmula(zo¡:
o.: ff# l/loo krn
213

II
¡
I
II
t
I
I
I
I
¡
I
i
I
I
cla Pi. + >Pr-;:sffi. (e5)
para evaluar las cualidades de frenado se adoptan por ana'
cidad se reduce hasta el valor preiijado;"'" Z\"tii^-po *íni*o de frenádo i¡in, reQuerido para recorrer el
camino Sf.n.,ín.
§ 2. Frenado con el motor desembragado
P'' :2M'' f' ' (96)t If _
f , ,
siendo Zlvlr. ¡,- suma de los momentos de f rotamiento en todosIos frenos de Ias ruedas.
La ecuación diferencial de movimiento del vehícttto durante el
frenaclo con el motor desembragado toma Ia siguiente forma:
influericia de tas niasas enurheradas es insigniiicante; entonceses posible, sin caer en grave error, por ejemplo, en los automóvi-les'de turismo, adoptar en la ecuación (97) el coeficiente ógrr: l.En una serie de cásos, en particular en tractores y automóvilescle gran traficabilidad, es imposible ignorar Ia influencia de lasmasás giratorias, ya que esto provocaría un error considerablecuando
"se determinan los índicei de evaluación de las cualidadesde frenado.
La deceleración iir será máxima y el recorrido y- el tiempo de
frenado serán respéctivamente mínimos, cuando el esfuerzo de
frenado tiene el válor máximo Pr..á*. Estando en buen estado los
irenos, el valor del esfuerzo máximo de frenado se limita por laadherencia de las ruedas que se frenan con el camino y tieneun valor
(eB)Pr.*r*: Qf f ,,
t
I
siendo Y¡, : reacción normal total del camino en las ruedas que
se frenan;e: valor máximo del coef iciente de adherencia de las'
ruedas con el camino, posible en las condiciones da'das.
gaclo:
I ' drsl.
- --
-
,rr - dt(e7)
rlr
/rV
rV
\llr{l
siendo li,: deceleración (aceleraclón negativa) del r¡ehiculo'
2t4
(ee)
2t5
. s, (qY¡, _..no).Jf'n,á*: T* \-¿- t- -"' -) '

si todas las ruedas están dotadas de frenos, lo que seneral-rente se observa en los automóviles modernos, iá ieacciónfr : G cos a', y la deceleración, máxima
lr,,¡* : ,h t, cos o =L
sen o).
En un camino horizontal -
: 9rPJIr*¿*: ¡;.N1ient¡as qejor. sea el camino, tanto mayor puede se¡ la dece-
:ración del vehícu1o durante el frenado. En caminos auror y .".o,r deceleración máxima puede alcanzar en tramos horiztnt'ales elalor ir.. u, x 7-B m/s2. La lluvia, el barro, tu f,.iá¿u, ir'ni.u.otros factores, que ej.ercen Lrna infruencla negativa en la ad-
(eea)
(eeb)
)n:
ia de los neumáiicos con el camiino, reducen bruscamente:rencia de los neumáticL intensidad del frenado.
(Prrn,¿* -f C sen 0)Sr.,.in : , (100)
:ndo u¡ y
6
crz: velocidades del automóviliniciar y terminar el frenado,
respectivamente alm/s.
Adoptando en esta ecuación pi. :gl¡rr, obtenemos el reco-rrido mínimo de f renado en metrca,''n'*
e. ou,,o (ri - ,3)-trmín - rs-CG
=Ez 'üE' (lol)
De acuerdo ,con ta ecuación (99), + (+ * sen o): i,..r*.- Haciendo la tran.sformación correl*ponoiente, expresamos Iafórmula (l0l) de la siguiente for, ,-,"-""
a,'^ mtn (l0la)
(102)
Si el frenado se realiza con una deceleración l¡. (/r.r¿*, en-tonces el recorrido será S¡, ) Sr,.¡,. por analogía a la fáimutaanterior es posible escribir que
9,e"
- 'l ":l
"r¡ - -iJl---r lr
(I
En caso particular cuando el frenado se realiza en un caminohorizontal con deceleración /r,.r*:#l V se llega hasta la pa-rada completa del vehículo, el recorridS"d. fr.nudo mínimo s,..,o(m) tendrá el siguiente valor, obtenido de ra ecuación (l0la):
si.-,^: ++: +#: o,oo4 &S, (roa)'.mrn Zgq 29
siendo I/r : velocidad de marcha en er momento iniciar de frenado,km/h.De las fórrnulas obtenidas s
recorrido mínimo de frenado infdad en el momento inicial detanto mayor será eI recorrido demínimo de irenado también audel camino. Finalmente,_cuanto menof es la intensidad cie frenado,o sea, menor el valor de la deceleración,.r.udu ¿r;r"t;'"t ¡r.-nado, tanto mayor- será -la longitud del recorrido ¿. ii.rá¿o.Al deducir la fó¡mula (10.3) no se ha tenido .n .r.rtu q,r.desde el momento cuando en lí conciencia del .orJu.i-'rour"."por primera vez la señal acercr de la n..üi¿rá"áá-!áol'ru,
"rf renado, hasta el comienzo de iiánaao'-lolri-;r;..;rr['cr.rtotiempo, durante er cuar er vehícuro áontinúa r, ,;;;h;-con ravelocidad anterior. Este
. tiempo pr.poirtórió- p; j;-;;. "ai"uiai¿o
en dos etapas: durante la primeia ltapa et conductor reacciona
(
I(
(
((
t(((((((((t(a
(G
217

lrcnado total Y el movimiento trxlma."'L; primera etapa se denomina tiempo .de. reacc.í.ón.del con'
,t urTir."Sü' i'iriu.-iOri i, a.p.nde de l as cuali da des indivi dLrales del
namiento hidráulico en buen :;11i?" ;:rfl:?i|l'.,31t¡6 i: ;s tuberías de aire. En los auto-tico del frenado, a causa de 1a
aire, el tiemPo de accionamiento
iciones de adherencia con el ca-caso cuando Ia iuerza de frenadodas delanteras Y traseras Propor-herencia de éstas con el camino'tribución de las cargas entre las
nte el frenado .v a consecuencias entre las fueizas de su adhe-
bastante considerables. Al mismos de los mecanismos de frenadonado entre las ruedas delanterasrminadas, indePendientemente de
externas. Por esta razón, las co-
rrelaciones óptimas entre los frenado de las ruedas
d;i;;;;r; y'traseras pLreden sólo en ciertos casos'
E,n to¿ot lós casos reitantes s de frenado máximos
l".iüi.. -..gún ta adherencia s dos únicamente en las
Iráli^r"¿é-ino de los ejes (o el delantero, o.el trasero) y no se
;;;;;;.ñ;rán por compieto ias ¡uerzas de adherencia de Ias rue"
das del otro eje'
218
La eficacia de la acción de los frenos también puede ser redu-cida como consecLlencia de la suciedad, desgaste y regulación in-correcta de los mismos.
A raíz de las circunstancias indicadas el recorrido So fr.t,totaL (de parada), necesario para detener el vehículo es mayorque el recorriclo de frenado mínimo calculado Si,.¡n, obtenido delas fórmulas dadas.
Para determinar el recorrido de parada del vehículo por uncamino horizontal es posible utilizar la fórmula propuesta por elprofesor D. Velikánov, que precisa la fórmula (103) expuesta an-teriormente:
(r04)
siendo lr : tiempo de reacción del conductor, s;/z: tiempo de accionamiento del sistema de f renado, s;,€": coeficiente de reducción de la ef icacia de f renado, el
cual indica cuantas veces la deceleración máxima realdel automóvil es menor que la teóricamente posiblepor un camino determinado.
Durante los cálculos se puede adoptar para automóviles deturismo k": 1,2; para los camiones ke: 1,4.
Según las reglas existentes, el recorrido de parada de losautomóviles durante el frenado a una velocidad de 30 km/h encamino horizontal, con un coeficiente de adherencia no menos de0,6 no debe exceder 7,2 m para los automóviles de turismo y'
9,5/11,5 m para los camiones con peso completo de 9 t; en el de-nominador se indica la norma del recorrido de frenado estandoel automóvil completamente cargado.
Las normas establecidas, teniendo en cuenta diferentes facto-res estructurales y de explotación, se han adoptado diferentespara automór'iles de tLrrismo y camiones y, además, son diferentesdependiendo del hecho, si se frena un vehículo con carga o sinca rga.
En los «Qequisitos únicos para Ia estructura de los tractoresy máquinas agrícolas respecto a la seguridad e higiene del tra-bajo» r,igentes en la URSS se prevé que la longitud del recorridode parada de tractores nuevos de ruedas, sin remolques, duranteel frenado por un camino seco con pavimento de hormigón a Llnavelocidad de 20-30 km/h debe hallarse en los límites de 6,0-ll,0 m para tractores de hasta 4,0 t y 6,5-11,5 para tractores depeso mayor que 4,0 y hasta 6,0 t; Ios límites inieriores se refierenal frenado a una velocidad de 20 kmih, y los límites superiores,a ulla velocidad de 30 km/h. Durante la explotación se admite unaumento de los recorridos de frenado en un 20%.
EI tercer índice de Ias cualidades de frenado es el tiempomínimo de frenado Tnrnrn Qtre pucde ser determinado suponiendo
,o:(#!+o,oo4á"qli
r,
rl
,9
IIII 219

que el vehículo durante el frenado ayanza con deceleración uni-forme, ya que la resistencia a la marcha durante este tiempo eslproximadamente constante. En correspondencia con ello, la ve-locidad media (m/s) durante el frenado umerr = 0,5 (u¡ f o2), y eltiempo mínimo 7.1n (s) de frenado eficaz (sin tener en cuentalos trabajos preparativos)
En calidad de ejem.plo, en la f igLrra 77 eslá representada lacaracterística de frena¿b ¿e un ;;i;; ;. automór,litj que muestrucómo cambia el rnomento de irenaáo ,&1, , en d.i,ril;;;ia delnúmero de revoluciones ¿m der crgüenar. La característica [ue re-gistrada en Lrn banco de-oruebal ha-cien-do girar el árbol cigüeñ'al medianle Mt
((((((t(((((((((t(((((t((t(((t((C
(
s._rr mínr mrn - 0,5 (ur * u:)
De todo lo expuesto se deduce que un valor importante para:l aumento de la eiicacia del frenado tienen los siguientes fac-:o¡es estructurales y de explotación:
l. Disminución del tiempo de reacción del condLrctor y el deaccionamiento del sistema de frenado.
un fuente de energía e*ierna. E;i;;;_ ai:i.u(l05)
y Ia distribución
de las ruedas.buen estado téc-
(107)
árbol cigiieñal del mo-
2. Frenado simultáneo de todas las ruedasiptima c1e los esf uerzos de f renado entre ellas.
3. Liquidación de la posibilidad de bloqueo4. llantenimiento del sistema de frenado en
rico y su correcta regulación.
i 3. Frenado con el motor
En este caso durante el lrenado el embraglle no se desacopla;:l motor, si es de carburador, funciona en régimen de trabajo en¡acío con el encenclido conectado, y el diesel funciorra con Ia ali-nentación mínima de combustible, suficiente únicamente paratrué no se pare el motor.
El motor, acoplado al sistema de irénado del vehículo, crearn las ruedas motrices dos momentos en direccíones opuestas: elnomento de frenado NI'.. ¡,, originado por Ias resistencias querctúan en el motor, y el momento de tracción I,Ij, originado poras fuerzas tangenciales de inercia que surgen como consecuenciale la reducción de la velocidad de movirrriento de las masas delnotor que frenan. El primero cie ellos favorece el frenado del,ehlculo, el segundo, por lo contrario, lo obstaculiza. La utiliza-:ión del motor para el irenado puede ser eIicaz únicamente a con-lición dc que
l,l',. t, ) M'¡. (l0o)
E[ valo¡ del momento de f rena da Mi. ¡, se determina con la:cuación
i,It -
ll ,. ^il,"'r. fr - lt.
iiendo rtrI..,,, momcnto dc Ircnado en eltclr.
r20
l-r - U OUU ttUU l?UU ZUUU ít¡.oel q.urvrrruvrr quc se tlena y la Corres-pondiente reducción de la' frecuencia Fig. TT..Caracterfstica de fre-tte rotacion a.r-.i[ü.nat, ¿ste ;;;r;; "il,?"#u',,,'i. Sllil,or"?1,vez menot.
El 'alor del momento de inercia lvl'¡, que se origina en Iasruedas mc¡trices del vehículo, puede ..r éipi..uáo ¿. T, ,ig"uiente
torma:
IvI'¡ : ¡,n# irr\rr,
De [orma análoga a las deducciones hechas anteriormente,es posible demostrar que, entre la deceleración angulái dei cigte-aal ff, y h deceleración lineal del vehículo irr, existe la de-pendencia siguiente:
d'. -
, it.dl )tr rt
Teniendo en cuent¡ esto, escribimos de nuevo la ecuación an-terior cie la siguiente iorma:
Sus.tituyendo en la desigualdad. (l0q) en lugar de A1,,.t ! M,¡sus valores de Ias ecuacionés (l0z) y (i0B), ob-tenemos-ia"condi-ción sigLriente de Lrtilización del méto¿o de'frenaclo sin aásembra.gue del motor:
(l0B)
fulr. ^',lil.,rlf (l 0e)
221
de donde
/t, (

II)
)
II
III
I
sl la deceleración excede los límiies indicados, entonces el
no,íiai- rii-it motor pierde su sentído y.pued.e. acarrear única-
ii,;;;i;i;á;. Ét ,ruior máximo de la deóeleración, al exceder el
lii*ii'ár *áto. ¿.¡. .itui ábligatoriamente desembragado,, clepende
nriii.ioui*.nte del uáiái ¿.t -momento de frenado de1 motor, y del
|li,l.,, 'f. del momento de inercia reducido de sus masas en movt-
rriiLiito."Cuanto menor es el momento de frenado I'l' ,o 1' mayor
nÍ ,**.nto de inercia 1-, tanto menor es el valor de la decelera-
iiOli,-iiiñitiáá ¿urante'üi frenado con el motor. Con el propósito
ir.'"r.irur la eficacia del frenado los rnotores para _camiones pe-
J,i¿ár, áLriiná¿or a trabajar en caminos de montaña, hay veces
,ii," érta" dotados de válüulas p: ra estrangular el escape. de los
iilr.t"ii'i,ti.r-ái+"ritiror qu. Lt menten eI momento de frenado
tlcl motor."--Es racional utilizar el f renado con el motor- principalmente 'en
nouellos casos,.uuÁáo el propósito del frenadó es conservar la
ili".iiá¿-áá ,.iorirni.nto o i:uairdo se requiere -una pequeña redttc-
.ür"i. "fü. -Er
áii.á/ el empleo del mbtor durante f renados de
el diferencial en partes iguales entreerdas. Esto disminuye la irregtrlaridad
iotal posible en la distribución de los esfuerzos de frenado entre
i;;íJ;;'v-;;¿;.;1á probabilid d de bloq¡gg. d9 !'i'' de las
i"-:"¿^r. gúo'.ónfiinuv. ai aumento de !a estabilidad del r.ehÍculo
."rii^ f"t derrapes, dspecialmente en caminos mojados y resbala'
dizos."^- Cuando el vehículo está dotado de una transmisión hidrome-
.ani.á-ná-.i- poii¡fá frenar con el motor,. ya que..el convertidor
ñiáia,|üó prü. transmitir el momento de rotación únicamente
;;;;; áir.!ción: de la bomba a la turbina, o sea' .del motor a las
;;.;;; ,noiii..r. En calidad de freno puede ser utilizado el mismo
i,á.".rti¿á.'hidríulico, si éste e; dotádo de unos u otros dispo.si'
tivos para crear resisiencias aclicionales al llujo del aceite dentro
del cíiculo de clrcLrlación.
§ 4. Frertado de un tren de vehículos
EI frenado de un tren de automóviles o tractores-.puede ser
frenado total de vehículos independientes aco-
n articulaciones, cada uno de los cuales reciberes¡ectivas. En este caso, jttnto con el pro'
las bualidades de frenado corricntes detall¡dasmás arriba, sLlrge oiro problema adicional'. coordinar la acc[ótt
222
por iiit y ji:*. Es evidente que el cumplimiento del requisito de
!r. i-,'ó háyá'esfuerzos de compresión en-el enganche es posible, si
I
0
ll
u
,
r
IIt
,v
,}
,h)
,v
,9
ji:'> ifl,'t (1 10)
cuando se satisface la condición indicada pueden observarse
229

El recorrido de frenado mínimo del tren Slr.,n durante la
marcha hasta su cletención completa por un camino horizontaltiáne, de acuerdo con Ia ecuación (l0lá), el siguiente valor:
sl.*rn:+:r#. (1ll).l n,^á* 'J f rmáx
En esta expresión vemos que la necesidad de disminuir la de'
celeiación máiima del tren, cbn el propósito de evitar los esiuer-
;;; d" ¿";piesión en el enganche, -acárrea el aumento del reco-
rrido de frenado mínimo del tren.- Bn los cálculos expuestos no se tuvo en cuenta la existencia
en el enganche de h
citados provocan enquc origina un aume
En los lrenes decarga, dotados de frenoslidad de que se originenva oue a consecuellciaáire'desde el aparato deres, los frenos de los remolquesretardo en relación a los freno,.sún datos de algunos experimentadores, el criterio para que no
se"origine el «plegádo>> es la condición:
Q < 0,16 G,
siendo Q: esf uerzo medio de compresión en el enganche .del auto--'¿"n (tractor)' or:*l':i f ,tÍ,o1'to"L"r:il.r(T;t:[J.cuesta abajo. Para dismi-en este caso, esfuerzos deal reducir la deceleración
lo que generalmente su frenado
se efectúa con el motor y tiene como propósito conservar la velo-
.i¿ál-i"i.l.i. Además, pLra e,itar un cálentamiento excesivo de
ioi-ir*. del remolqu'e al marchar por largas pendientes, las
in"finá.1on.i lín',it.. rie las últimas, en las que puede ser permi-
ii¿l tu explotación de trenes, deben ser limitadas. Cuanto mayor
r* óicóe'ficiente del peso del tren, o sea, la razón.del peso de
i;; .;;;tárái át p.to 'del auto róvil, tanto menores deben ser las
inclinaciones Permitidas'
Se requiere deternlinar si es posible, frenando el automóvil, no accidentar
v t-
((I((
tp
Introduciendo el valor de u¡ -obtenemos:
i,7l/hv:t:
i |2t i i|l!,, : t t t t ry : t :t
({r * l:)c'¡ * s¡,: s, m,
o: de la ecuación superior en la inferior,
Fis. 78. Esquema Para el ejent" plo I ilel capítulo Vl.
Es oosible evitar la colisión si el automóvil llega a la lilte¿ po.r-donde p.asa
el peatón después de que éste haya crttzado la zona de marcha del automovll'El Ii.rpo necésario paia que el peatón cubra esta distancia,
Durante este tiempo el automóvi'l que se frena, marchando con deceleración
,"if;;" ¡;;, */t', d.ü....orr"t el camino Sp; en este caso, su velocidad se re'
;;;j;e 'ü^!U
"1,- Átt. A las condiciones indicadas corresponden las siguientes
dos ecuaciones:
tt+t2+T:2,8 s.;
o, teniendo en cuenta la fórmula (102),
o?_ oi(lr + 12) ot * #: Sp m.
'tlt
t
({(((((((:((
EJENlPLOS DE CALCULO
Ejemplo L EI conc.luctor de un atrtomóvil de .turism.o que march.a p,o,r el
t.r*o'-toiántal de un .á*ino ,"iáttarlo a una velocidad -ai7l'o m/s (\/'::'éñ kñlhi: .n i, Ji....ión señalada con la flecha lz (tig' 7.Q)' h.a. visto en
Jñrü"'o'';;;;;rió;-q;.'.ilrá co.¡¡endo el camino en Ia dirección A-A'per'pendicular al movimiento,
224
Suponiendo que la re:rcción del conductor scrá lo suIicientemente rápida y
"l ti;;i; ;;-áccionamiento del sistcma de f renado normal, adoptamos que
i' i;;:0,8 s. En este caso, de Ia ecuación anterior hallamos que
e -lRrr.¡!vvl
0z: -:50-1,8'25:15 m/s.
para disminuir la velocidacl de movimiento desde 25 hasta t5 f/.t durante
el tienipá i,, - 1t, * l) -- 2,8 - 0,8 : 2 s, se debe [renar el automóvil con una
B deceleración: ¡rr:or-t)z:ry:5 m/s?.
225

Slendo bueno el estado de los frenos, este valor de Ia deceleración en ca-mlno as[altado seco es posibte.
Ejemplo 2, Se requiere determinar el valor teórico del recorrido de frenado
ftlnlmo SIrn.,,n d. un autotrén compuesto de un camión (tractor) y un semirre'
ntolque (lig. 79), que marcha por un camino horizontal a una velocidad Vr:- 60 km/h.
Dato! iniciales: batalla del semirremolque L""^ : 4,35 m; las coordenadasdc su centro ngitudinal o¡em:1,95 m, vertical hru. - [,65m;ol coeficiente las ruedas del camión tractor y el semirremolquerfl - 0,7. A c pequeñez, se desprecia la influencia de las masas(lratorias de irremolque.
El valor nláximo de la deceleración parcial del semirrernolque iflre-.* se de.
termina por la ecuación de su movimiento durante el f renado:
Grem ;rern -
Drem-: lii*¿*: Pirr¡.*: q')'1"t,
siendo G.u* : poso del semirremolque;
Pfl-, : esfuerzo de [¡enado máximo, que puede ser creado en las rue-¡'maKdas del semirremolque;
Y|t^ : reacción vertical del camino en sus ruedas.
La segunda reacción vertical )'f"*, que acciona sobre el semirremolque, se
halla en e[ punto de apoyo del semirremolque en el camión tracto¡.Teniendó en cuenta que en el sentirremolque actúan, en las condiciones da-
das, como se muestra en la fig. 79, dos fuerzas, ambas aplicadas a,surcentro de
gravedad: el peso del sernirremolque G,e. y la fuerza de inercia -i]- li.";á*,dirigida en el sentido de la marcha del tren, hallamos que C
(or". (Lr"* - o.u.) - -"= i[.",Tá*ár"*
Lr"^
I -n"rem *tem 4,35 - |,95
i[i[¿*: eo ffi: ca ?86 +¡7;m- o o'44sQ',"* * tPár",.jii.¿*
de donde
ir
III
D
I
Introduciendo el valor obtenido de fj"" en la precedente ecuación
vimiento del sentirremolque durante el f renado, obtenemos
;!em
G.",n ,r". Lr.* - ,r.,n - l+i!L l'."
"I '!'tá*:
9G'e'n
--
Ir.r '
226
Et valor if3*. ha resultaclo ser cons que la decelera-'¡,máx
ción oarcial r,osiÜle'del camión, la cual de ión .(99b)' =gq'F;;';;it;; [;;;i '.'l*.moiiu.
choque te el frenado' es
irnprescindibte linrita¡ la decetéración del i[f[r.; en este
caso, el esfuerzo en el enganche será igual a cero. (espectivamentei la decele-
¡ación máxima del autotrén ll:*á-ii:flá-:0,44 gQ.
El valor teórico mínimo del. recorrido de frenado buscado del autotrén se
determina por la fórmula (l0la):
s- _ v', .= uo' =32m."rrmrn 2¡ll*á* (A,6)2 2.0,44gq. lB
Eiemolo 3. Un tractor de ruedas, dotado de frenos montados en los sémie-
¡., alJ iáí'iu.ári-irár.iit, marcha con un remolque de dos ejes por un camino
rtrac¡:elr-a ill,,,i_ : qr,,.rl,' ",
slendo ylra": reacción vertical del camino en las ruedas traseras del trac.
tor;ólr,i.: coeficiente que tiene en cuenta las masas giratorias del tractor;"srr árr^"t. e[ irenado con el motor desacoplado, es posible, de
acuerdo con la ecuación (l58) adoptar O!li': t'ts'
v femr2
Fig. 79. Esquema para el ejemplo 2 del capítulo VI.
Fig. 80. Esquema para el ejemplo 3 del capltulo VI'
de mo-
227

Teniendo en cuenta .las fuerzas principares que actúan sobre el tractor du-rante el frenado, mostradas en la fig.'g0, trllrrmoi qru tu ráaccia; -' "--
G\L-o¡-9jllo".ho "max
--------Z--, Poniendo el valor de rlrac en ta anterior ecuación, Ia escribimos de nuevo
en la forma siguiente:
;trac
't¡¿c C L-o-""!n* oó!1'." É l[;il"á_ : qt.".o ---¿ {,
de donde
llll"á_ : eq,.,. q,d;á;7 : g.o,B
. - De forma -a-1á-loga
se determina er varor cle la decereración parciar má.rirnadel remolque i[."fi].- con los frenos en su eje trasero. suponiendo que el coefi-:iente de las masas giratorias der remolque ó;:I : l, es posible escribir que
ii:[r'_ : se,". 7;ffiffi : g. 0,7 ;fif} = 0,26s.
AI instalar los [renos en er eje delante¡o del remorque, su deceleración par.:ial máxima ii.",ij.*.. deternrina áe la ecuación;
G__--i.. li:[,á'- : q,"mrlum,
londe
Capítulo VII
Tralicabilidad de automóvilesy tractores
§ I. Parámetros de la traficabilidad
Por traficabilidad de los automóviles se comprende su capaci-dad de marchar por malos caminos y a campotraviesa. Para laexplotación en la agricultura esta cualidad tiene particulár im-portancia y en una serie de casos determina la capacidad de tra-bajo del automóvil. Sin embargo, las exigencias requeridas de latraficabilidad no pueden ser iguales para Ios automóviles de todoslos tipos y deben diferenciarse en dependencia de la destinacióndel vehículo, el campo de su utilización y condiciones específicasde trabaío.
por dü traficabitidad los automóviles se distribuyen en tresgrupos: de traiicabilidad común, eleaada g alta.
Los automóviles de traficabilidad común están destinados parala marcha primordialmente por carreteras y caminos de tierra.En este grLrpo entra la parte principal de automóviles con fór-mula de ruedas 4X2.En el grupo de automór,iles de traficabili-dad elevada entran los vehículos de dos o tres ejes motrices, fa-bricados según los esquemas 4 \ 4, 6 X 4, 6 X 6. Estos vehículospueden trabajar tanto por caminos como a campotraviesa. En laagricultura, de los vehículos de elevada traficabilidad preferente-mente se utilizan automóviles de turismo y camiones del tipo4)(-4, fabricados sobre la base de vehículos fabricados en gran-des series de traficabilidad común. Los vehículos de alta trafica-bilidad son automó s ejes motrices, en los queel número de éstos s, automóviles semioruga yvehículos anfibios; se exige capacidad de mar-char por cualquier calidad y a campotraviesa,superando todos los obstáculos que se encuentran en su camino.
Además de la composición general, en la traficabilidad delautomóvil eje.rcen influencia las particularidades de la estructurade sus grupos y la existencia de unos u otros dispositivos paraelevar sr-r traficabilidad; es también importante Ia maestría de iaconducción.
Es posible lograr la elevación de la traficabilidad por los me-dios principales siguientes:
ytcac -
2,34 - 0,78
r,15.2,34 + 0,8.0,87 - 0,3T g(r(
((«(((((i(
((
((((
((
r(
((
(r(
y tellr _'l
s la reacción vertical del camino en ras ruedas delanteras der remolque.Luego de introducir el valor de r[e'n en [a ecuación de movimiento der re-
rolque obtenemos que
ií:flr'. : eq... Z;#rffi*¿; : g . o,7rrf#- = o,sss
De. este- modo, la decereración parciar rnáxima der rernolque. con los f renosr el eje detantero es considerabreniente á.r;; q;; -ri ti,"^árrl,1"l"X"til'i./o. e,rte caso, ilfm'* , l[lL"r_, lo que permit. i..n., el tractor y "i ,.*o-tqr. .onintensid.ad .má,rima, sin crea.¡ .en el enganche esf ue n.E[ análisis del resultado del pro.blem'i áiáiti§ua ¡ealizada
'.^r:: j?^1..-i:eferencia de mo.ntá¡ los Íi.nos-.n" Ios .-ái., .neje oelantero es correcta, independientemente clel p ;l lel re-olque.
22.9

l) mejoramiento de las cualidades dindmícas del automóvilr,lcvando su potencia específ ica, aumentando la relación de reduc-t'irin de la máxima transmisión, empleando transmisiones más¡rcrlectas, como las hidromecánicas, que permiten cambiar Iasvclocidades durante la marcha sin interrumpir la transmisión dell potencia a las ruedas motrices, etc.;
2) dismínución de las prestones específicas sobre la super-Iicle deL camino y reducción de la resístencía a la rodadurat,nrpleando neumáticos de medidas y perfil correspondiente, redu-t'icndo la presión deI aire en los neumáticos o regú[ándola durarttelu marcha en dependencia de las condiciones del camino; obser-vando el mismo ancho de la rodada para todas las rLredas, conobjeto de que las ruedas traseras vayan por la rodaJa hecha porlas ruedas que le precedían;
3) mejoramiento de las propí.edades de adherencia del auto-rnóvil mediante el posible aumento de su peso de adherencia, elcmpleo de neumáticos especiales y diversos dispositivos paracvitar el patinaje de las ruedas motrices, la introducción del blo-rlueo forzado del diferencial o mando automático del mecanismode bloqueo y la sustitución de los diferenciales comunes por loscle autobloqueo, capaces de redistribr-rir los pares motor transmiti-dos a las ruedas que éstos ponen en rotación, dependiendo de lascondiciones de adherencia de distintas ruedas con el camino;
4) adaptación de la estructt¿ra del automóaíl a la níarcha porcaminos irregulares dándole a éste formas geométricas que evitenla posibilidad de chocar con obstáculos que se encuentren y eli-giendo la cinemática de la suspensión apropiada, que permita quelas ruedas del automóvil al superar irregularidades no pierdancontacto con el camino.
Los tractores agrícolas, como vehículos de tracción destinadosa trabajar en el campo tienen mejor facultad de tránsito que losautomóviles de traficabilidad común e incluso elevada. Esto espropio tanto para tractores de ruedas con neumáticos de bajapresión como en mayor grado para los de orugas. No obstante,la traficabilidad de éstos en muchos casos es insuficiente, teniendoen cuenta Ia capacidad de desarrollar la i,uerza de tracción nece-saria. Las propiedades mecánicas del terreno, que influyen en larodadura y 1a adherencia de los órganos motrices del tractor,están expuestos a considerables oscilaciones estacionales bajo lainfluencia de las condiciones meteorológicas. El exceso cle hume-dad en la primavera dificulta la realización de tales operacionescomo el labrado del suelo antes de la siembra y la propia siembra;en otoño las frecuentes lluvias dificultan la cosecha, el acarreode la cosecha y el cumplimiento gricolas. Tam-bién surgen dificultades al utiliz erno, especial-mente al marchar por caminos nevados. Losmás sensibles a las oscilaciones del suelo sonlos tractores de ruedas, que tienen en primavera y otorlo, en sue-
230
§ 2. Influencia del dilerencial en la traficabitidad
En orimer término examinemos los diferenciales entre ruedas,
,n"nir¿[r'áá' loi pr"ntes motrices de automóviles y tractores de
23t

rencia con el cami r ejemplo, un vehículo 4X2con un diferencial ipo corirún en el que el frota-miento es pequeño reciarlo. A causa áe [a accióndel efecto diferenci de tracción en ambas ruedas9"b.!_ser_ igua-les. _A consecuencia de ello la fuerza tangencial detracción del vehículo según 1a adherencia
Pp:2Pq*rn, (l 12)
siendo Pr.,n:fuerza de adherencia con el camino de la ruedaen la cual esta fuerza tiene el menor valor.
Si el diferencial estuviera bloqueado, ello permitiría utilizarpor completo las posibilidades de adherencia dé ambas ruedas yde esta manera elevar la traficabilidad del vehículo. Su fuerzáde tracción según la adherencia se elevaría hasta el valor máximoposible en condicíones determinacias de camino
Pqur :Pr.,n*P*.r*, (r t3)
iiendo P*.n*:fuerza de tracción máxima según la adherencia dela segunda ru.eda, que se halla en mejores condi-ciones de camino.
La eficacia del bloqueo E¡1 se caracteriza por la relación
ro, :*::=+i**:o,s (r .#). (r4)
En caso particular, cuando los pesos de adherencia de ambasuedas motrices son iguales
E¡r: o,s (, * ff;), (l I 4a)
iendo q,nu* y en ir, : coef icientes de adherencia con el camino de
las ruedas que se hallan respectivamente encondiciones dei camino favorabtes y desfa-vorables.
Cuando mayor es la diferencia entre los coeficientes de ad-erencia e,,á* y e.¡n, tanto mayor es la eficacia del bloqueo delif erencial.
En la actualidad en casi todos los tractores se utiliza el blo-
:gativas, Por ello, el bloqueo iorzado se recomienda principal-ente como una medida de corta duración, para elevar lá facuitad:.tránsito en algunos tramos clel camino desf avorables segúrn la
edherenci a.
,
Además del bloqueo iorzado completo, se utiliza el bloqueoautomático parcial,'empleando diferénciales con autodetertción.Independientemente de la diversidad de las estructuras de estetipo de dife¡enciales, en la mayoría de ellos el bloqueo parcial seconsigue a cuenta del elevado frotamiento interno, el que obsta-culiza la rotación relativa de los semiejes, hasta que la di[erenciaentre los momentos de tracción de las ruedas alcance el valor
Fig. 81. Esquema de un diferencial con embragues de bloqueo.
y conducidos de los embragues se aprietan uno al otro por lasfuerzas axiales originadas durante el funcionamiento de los en-granajes cónicos del diferencial; su valor es proporcional al parmotor transmitido por el diferencIal. En algunas estructuras elmomento de frotamiento de los embragues se aumenta a cuentade iuerzas axiales adicionales creadas especialmente, tambiénproporcionales al momento transmitido.
Ilientras qLre el diierencial quede bloqueado, ambos semiejesgiran juntos y el par motor transmitido al diferencial, se distri-buye entre 1os semiejes proporcionalmente a las resistencias apli-cadas a los mismos. Cuando se produce el desbloqueo del diferen-cia[, uno de los semiejes, lo llamaremos <<adelantado>>, comienzaa girar con mayor rapidez y el otro, <<retrasado>>, más lentamente.
Determinemos cómo en este caso se distribuyen los momentosde impulsión entre los semiejes. De la ecuación de equilibrio delos momentos exteriores aplicados al diferencial y de ia condiciónde igualdad de la potencia transmitida al di[erencial, a la sumade potencias transmitidas a los semiejes y la que se consume parael f rotamiento dentro del diferencial, tenemos:
Md¡: tlfirpr * tU¡mp:i
Narr: //'r * ff': * lV'i
iÍr(
((
I(((I({tt(((
t(
tt(
(
(
(
(
(
(
(
(
(
(
((((
233

rT
I
t
I
I
I'
,l¡
,l
srendo Mair y N¿rr: ffiffi*,,l,t1sXfeil,r"it,fr?,o,
v la potencia
Designemos la velocidad angular del semieje retrasado por cDt'
del adeiantado por <02, de la caja del diferencial por o¿rt. Como
se conoce de la teoría de los diferenciales, odii: '' l9' . 'u
esta manera:
ffrt : Mtmprori N rz: Mt^pz$zi Ndit: M¿t¡co¿ii'
La velocidad angular relativa de rotación de los discos con'ductores y conducidós de los embragues de bloqueo es igual a
oal¡ - co,:0,5 (o, * ror) - (0, - 0,5 (o, - ,,).
Teniendo en cuenta lo expuesto tenemos:
N. : 0,5 M,(a, - ot),
siendo Mr:Irlofilento de frotamiento de los embragues de blo'queo.
Haciendo ias transformaciones correspondientes en las dos
ecuaciones iniciales expuestas arriba y resolviéndolas-conjunta-mente, obtenemos que el efecto diferencial al utilizar diferencialescon uútodetención se revela cuando los momentos de impulsiónen los semiejes retrasado y adelantaclo tienen los valores siguien-tes:
Milf + MrrV/1¡np¡ : -----r-,
M¡t¡- M,lYl trnP: : ----o- '
. Ml,nol ¡ldif + ¿Irl¿ut:7i.p, : uo'rr-4 (1 16)
al utilizarse diIerencial con autodetención,siguiente:
P,p^- Pe,nin (t * á0,).
Pn^n*2 P**,nÉo'.
Hay veces que es conveniente expresar el momento de frota-miento' clel difeiencial en forma adimensional, para ello introdu-;i;;*;, et cánc"pto d.e momento específico de frotamiento del di-
Ierencial'.M.
Mr"rr: fri.Dete¡minemos la dependencia entre el
del dif erencial y su momento específ ico
ecuación (l 16) obtenemos:
. if¿ir*Mr".oMo,, 1f ifru.oftut:7;, -T[*ru*
: T=,vt;'
tendrá el valor
(l l7)
(l lB)
coeficiente de bloqueode frotamiento. De la
(118a)
,I
,I
rl
,I
rl
Vr
I
Designemos como anteriormente la f uerza. tangencial de trac-ción seg-ún la adherencia de la rueda, que se halla en condicionesde camlno desfavorables, por Pen,in. En este caso la tangencial
de tracción total Pru, la que puede desarrollar un vehículo 4X2
231 235

rencial, surge ladidas.
El rendimiento
La relación de las
Je giro del vehículoCenci a:
;iendo
necesidad de rletermínar el valor
del diferencial se determina con
de
la
estas pér-
ex p res ión:
t((((((ttttt((((((((
(r(
(((
(
(i(
(
(
(
,(
(
(
(
N tt + N12 _ Mi*pror * Mr.p:o:r ¿i¡
: N* :
-Mru.;: .
Teniendo en cuenta que M¿¡¡ :.&Ii.p I * llrli.pz : I,lt,,,p r(l * ftrrr),y o¿ir:0,5 (o¡ * or),de Ia ecua-ción anterior, después de ciertastransf ormaciones obtenemos:
1,or rapidez, de lo que gira-ría recibiendo Ia impulsióndesde la transmisión, el se-mieje correspondiente se de-sacopla y Ia rueda de con- +ductora se convie¡te en con-ducida; todo el momento deimpulsión se transmite a lasegunda rueda.
De las propiedades anali-zadas de Ios diierenciales conautodetención resulta que suutilización es incompatiblecon el frenado torzado delsemieje retrasado del vehí-culo durante Ios giros; porello, en los tractoies dondese emplea este método degiro, no se montan dileren-ciales con autodetención detipo común en los puentesmotrices posteriores. En es-tos casos pueden resultar serracionales diferenciales debloqueo de otro tipo, en loscuales los enlaces de bloqueoentre los semiejes molrices
-. _o'ldif -
L
CDck¡r t G,
(rb + r)(# *,)velocidades angulares $ depende del radio
ú)¡
y está ligada a éste con la siguiente depen-
rrl2 R + 0,58
"\:T=¡FE:,R:radio de giro (distancia del centro de giro hastá el
eje longitudinal de simetría del vehículo);B:ancho de la vía (rodada entre Ias ruedas).
Teniendo en cuenta. esta dependencia Ia fórmula para deter-ninar el rendimiento del diferencial toma la siguiente forma:
É.,j1rl¿i¡:l-2R't¡rTi.
De la ecLLación obtenida se desprende que el rendimierrto clelliferencíal depende del valor del coeficiente de bloqueo y el radiole giro. Cuanto mayor es el coeliciente de bloqueó tanto menor,s el rendimiento del diferencial, y cuanto mayór es el radio de
Jiro tanto mayor es éste. Por ejemplo, .on f : l0 y k¡t:4.
Fig.82. Esquema de un diierencial conmando automático del bloqueo.
rl¿i¡: I -Si consideramos que además del alto rendimiento del di[eren-
cial, la rotación relativa de los serniejes transcurre por cortoplazo, las pérdidas de potencia para el frotamiento en los di[e-renciales con autodctención es insign if icante.
En ciertas ocasiones en lugar de diferenciales, entre las ruedasnotrices se montan mecanismos especiales con embragues derueda libre. Ellos se llaman diferenciales de rueda /ióre. Estos seutilizan, por ejemplo, en los puentes nrotrices de los potentesltactores de ruedas 4 X 4, fabricados en Ia fábrica Kirov de Le-
36
cesan automáticantente, cuando las r¡ledas delante¡as dirigidasse desv.ían. de la posición ne,tral a un ángulo preestablecidé.. .En la fig. 82 están dados Ios esquemas"de tál tipo de direren-
cial. En e[ del dife-rencial est de fric-ción 3; en ogo unerrno de los d]ieren_cial. Gracibloqueado, hasta qLre en las ruerencia de los momentos A^l¡.pmentos de frotamiento ,&11 del eesto las ruedas obtienen la posibIocidades angulares al resbalar e1 embragLre de bloqueo.
+ +:0,e7
237

De n las transmisiones finales 4, es
¡rosibl siguientes:'--i¡ de bloqueo entre los engranajesde los ema <<a»
§ 3. Parámetros geométricos de la traficabilidadEntre los parámetros geométricos de la traficabilidad de auto.
móviles y tractores podemos enumerar:1) luz sobre el suelo del vehículo;2) ángulos delantero y trasero de traficabilidad;3) radios longitudinal y transversal de traficabilidad.La luz sobre el suelo ( (f ig. 83), es decir, la distancia entre el
punto más bajo del vehÍculo y el camino, da la representaciónacerca de las irregularidades máximas acumuladas, sobre las quepuede pasar libremente el vehículo. En los automóviles de trafi-cabilidad común, la luz sobre el suelo se toma en los límites de160-220 mm para los automóviles de turismo y 240-300 mm
Fig. 83. Parámetros geométricos de la traficabilidad de un automóvil.
para los camiones. En los automóviles de traficabilidad elevada,la luz sobre el suelo se hace generalmente 25-50 mm mayor; enlos automóviles especiales de traficabilidad alta ésta llega hasta400 mm y más.
En los tractores agrícolas de empleo general la hz sobre elsuelo se halla en los límites de 250-350 mm; en los tractoresindustriales y tractores de traficabilidad alta su valor, en la mayo-ría de los casos, no es menor cle 400 mm.
El paso del automóvil por zanjas, montículos y otros obstácu-los, puede ser obstaculizado por las partes que sobresalen tras losIímites de su batalla. La facultad de tránsito del automóvil a
través de los obstáculos indicados, depende del valor de los ángu-los de inclinación a y P (fig. 63) respecto a la superficie delcamino de las tangentes trazadas a las respectivas ruedas desdelos puntos delantero y trasero más distante del automóvil. Losángulos a slos ángulosdicho parámlo más granlos sigLrientes valores, grados:
AM,.o:2Mrir.¡i (119a)
a) aI disponer el embrague de bloqueo entre el cuerpo del di'tcreícial y ei semieje conforme al esquema <<b»
AMr.p : M¡ir.r, (l lgb)
238
I
I
En los automóviles de turismode t¡aficabilidad comúnEn los camiones de t¡aficabilidad
comúnEn los automóviles de traiicabili-
dad alta, no menos de
20-30, t 5-20
40-50, 20-40
45-5q, 35-40
Parámetros geométricos de la traficabilidad de
239

sisuientes límites:" a) en automóviles de turismo
mente istlal a la de las traseras obien tríctores de oruga. Siendooar el número de Plantas, ademásit. los tractores indicados, Paralabrar algunos cultivos de tallolrrso se- emPlean tractores de
ti-eí ruedas con una rueda delan-tera o con un Lvantrén con dos
ruedas contiguas.Denominimos zona de Protec-
ción la distancia Por el Planohorizontal desde la [ínea mediaaxial de Ia hilera de Plantas hastael borde de la llanta de Ia ruedao la oruga. HaY dos zonas .
de
de oeoueña cilindrada detic óili'ndrada media dede gran cilindrada de
b) en camiones
de caPacidad de carga de 2,5 a 3,5 mpequen a
de'ca'Pacidad de carga de 3,0 a 5,5 mmedia
de gran caPacidad de de 5,0 a 6'0 mcarga
También se debe considerar parámetro geométlico de.la tra-iicaüiii¿a¿ el ángulo 0 de flexi6ilidad del autotrén en el plano,..rti.ái fiig. 8 )l Este debe ser suficiente para que sea posible
Fig. 84. Angulo de flexibitidad de un t¡en.
:orrespondientes del presente manual.
i 4. Traiicabilidad del tractor entresurcosde cultivos entrecavados
La traficabilidad entresurcos se caracteriza con Ios índicesiiguientes:-l) medidas de las zonas de protección, que resgua¡dan a las¡lanfas de ser dañadas por las ruedas (orLrgas) del tractor;
2) valor de la luz iobre el suelo en los lugares por donde)asan las plantas bajo el tractor;
!40
85. Zonas de protección deplantas al marchar el tractor
ent¡e los su¡cos.
olotección: Ia exterior e interior'besienanclo stts medidas resPectil;ü;;;I"'iut"*.¿i¿ut respectivamente por cs¡ ) ú¡¡' d€ la
f ig. 85 tenemos
(r20)
.igil-ti ü^di."á"-i^. ronu, de protecci?l^,t*lt'iott: t^l-11:t-*T::i¿"r;i;'[átpi^"¿" en las .ecuaiiones i]19).-':: i.^']:. obtenemos
;i .ü;itii;ligui."t" para lograr la condición indicada:
B: ffin, (12 r)
Figlas
2,5 a 3,5 m3,5 a 5,5 m5,5 a 8,5 m
siendo¿:númerodehilerasdeplantasquepasanbajoeltrac-tor;
m : anchura entresurcos;B v"i: iespectivá*.nt. el ancho de la vía de las ruedas y la-
anchura de éstas'Las mejores condlciones de traficab.ilidad enJ'-tt^u':o?-::",:?i:
En la mayoiía de los tractores de de tipo
"rrñiiuáát ,niu.riur, .1 ancho de la r'ía de regu-
i;;;;;l;;;; p"r*it.-.'tu'oi'i" Ia dim acuerdo
;.on"lr'á.üo.ié,'l ltzt¡. t-as zonas de p nden en
este caso^ ^ m-bl-ln-eex- o '
9 3ax. 549241

La anchura de las ruedas (orugas) debe ser tal que al mar-char oor cualesquiera entresurcos dados, las zonas de protección..un ho menos de l2-15 cm. Al determinar las medidas de las
pasan Ias plantas (luz agrotécnica) se dicta por la. altura máxima
iue las plántas alcanzaÁ cuando 'se
realiza la última operaciónde labrado entresurcos. Para los cultivos de tallo corto (re'
cidas. Los contornos del espacio libre bajo el tractor deben corres-ponder a las formas y meáidas de la parte de las plantas sobretierra, dispuestas en los surcos.
§ 5. Ensayos de la traficabilidad
La elección de las condiciones para los ensayos de traficabili'dad debe llevarse a cabo en dependencia del tipo y la destinacióndel vehículo. Los automóviles de empleo general se ensayan porcaminos de tierra, ados para la siembra, porcampos nevados co de la nieve relativamentepeqúeña y en otra de es posible .utilizar losáutbmóvil-es cle traf Los automóviles de trafi-
qt,
a
a
I((((e
(tte
t.
tttttttt(ttt(
((
(
(
(
I(
(
(
9r 243

It
)
I
tt
tr
stos diagramas es posible calcular la presión media especílicac las oiugas sobre el suelo, determinar el valor de Ia presiónspecíiica máxima, definir la posición del centro de presión del'áctor y calcular la fuerza tangencial de tracción total de lasrugas.
Fara una evaluación cualitativa de la traficabilidad pueden:rvir los siguientes índices, que se determinan con medios sen-illos de medición:
L EI valor máximo del hundimiento de las orugas en el suelo.2. La inclinación longitudinal del tractor como resultado de
na distribución irregular de las presiones normales a lo Iargoe la superficie de apoyo de las orugas.
3. M-edida de la luz sobre el suelo del tractor durante los en-lyos y su variación al comparal'se con el valor de la luz sobre'sueló estando el tractor esiacionado en ttna superficie dura,
EJE]VIPLOS DE CALCULO
Ejenrplo l. Al arar con un tractor de ruedas 4 X 2 la reacción nornral del
elo en su rueda motriz que marcha por el surco fí: 1500 kgt, y en la rueda
e va por el camPo Yí - 900 kgi.Se requiere determinar la fuerza tangenciaI c1e tracción que puede desarro-
rr et tractor, sin exceder los [ímites permitidos de patinaje de las ruedas mo'ces, si e[ diferencial del puente trasero no está bloclueado y si Io está.
Datos iniciales:Valor permitido del coe[iciente de utilización del peso de adherencia por 1a
:da motriz que va por el surco q'^^- : 0,6; por la rueCa que va por el
,oo o'l : 0,5.' "PerCuando el dilerencial no está bloqueado, la fuerza tangencial de tracción
Itractor está limitada por el patinaje de la rueda que va por el campo,yas propiedades de adherencia son menores que las de la rueda que va por el:co. Por la fórrnula (ll2) su valor es
P* : 2e,,,0".Y'i :2.900 . 0,5 : 900 kgi.
Estando el di[erencial bloqueado, cada una de las ruedas motrices, indepen'ntemente una de la otra, podrá hacer uso de srts posibilidrrles Ce ¡dhelen-. En este caso la fuerza tangencial de tracción del tractor, contornte a lamulzr (li3) crecerá hasta el valor:
Prbr: elo",Y'r + +'!r",Y'! : 1 500. 0,6 + 9J0. 0,5 : I 353 kgf.
De esta manera, el bloqueo del di[erencial ha permitido áttmentar [a Iuerzagencial de tracción del tractor 1,5 veces, sin exceder los limites perrnitidospatinaje de las ruedas motrices,
4
Ejempto 2. Un camión 4 X 4 con 'diferencial entre ruedas de tipo común ydiferencial asimétrico entre ejes, acertó con una de sus ruedas delanteras sob¡eun sector del camino cubierto de hielo, con ún coe[iciente de ádheienciagmin-
-n2Se rec¡uiere deterrninar l¿ f ue¡za tangencial de tracción máxima segúnla adherencia que puede desarrollar el automóvil con el diferencial entre e-iesembragado y e[ puente delantero desacoplado, si, al parecer, la marcha se efec-tuara según e-l esquema 4 \ 2.
Datos iniciales:l. Relación de transmisión de dife¡encial entre ejes iarr : 2.2. Reacción normal del camino en las ruedas del puente delantero Y¡ :
: 4000 kgi, en las ruedas del puente trasero Yr : 8000 kgf, entre las rLredasde cada eie las reacciones se distribuyen en partes iguales.
3. En- las tres ruedas restantes el coeficiente de adherencla con el caminoa : 0'6.
Con el dilerencial enire ejes acoplado la fuerza tangencial de tracción máx-xima del automóvil según la adherencia tendrá el valor siguiente:
P*: e.¡nr¡ (l * r¿) : 4000. 0,3. 3 : 3 600 kgf.
Al desacoplar el puente delantero la fuerza de tracción buscada se desa-rrolla únicamente por las ruedas posteriores. Su valor es
Prp: : I:tP : 8000' 0,6 : 4 800 kgf.
Los valores obtenidos de P* y P,p: demuestran que en el caso analizadoel puente motriz delantero, a causa Ce no estar bloquedo el dife¡encial entreejes, disminuye las cualidades de tracción del automóvil.
I

§ L Cinemática de giro
Fig.86. &létodos principares de giro de tractores de ruedas y automóvires.
3 de acción bilateral, mediantegarse y, como resultado, las ruegulo respecto a la dirección inigiro se utiliza en los tractorestodas las ruedas motrices y en llos, que un eslabón, por ejémplgr..g un carro de un eje con elmotor y el otro, un tractor áe ensiiladura., Analicemos primeramente el caso más sencillo de giro de untractor con una rueda delantera dirigida (f ie. BB). Ááootemosque el giro .se efectúa con un radio"constán't. l'u.láiiír¿ a.Targ¡i. estable, y supongamos q,e los neumáticos no
-ti.nunelasrrcrGad tatera t. En estas condiciones la marcha del tractor
se como el giro alrededor de unosición es suficiente determinarales a los vectores de las veloci_
Capítulo VIII
((((((tt(
(
((
(((
e
(
t(
ttttt(
t(
ttttttt
Dirigibilidadde ruedas
de los tractoresy automóviles
El giro de los tractores de ruedas y automóvileslos métodos siguientes:
a) cambiando la dirección de movimiento de lasdas; b) creando una diferencia de los pares motormotrices; c) combinando ambos métodos indicados.
se efectúa por
ruedas dirigi-en las ruedas
con el primer método la dirección de movimiento de las ruedasdirigidas, en casos, se cambia vi(fig. 86,a). es que las ruedasIas delantera das se desvían de Iocupaban du rectilínea, en ellas
240247
__t

punto Or, pasa por el eje geométrico de
hlano, normal al vector de la velocidadile las ruedas traseras. El punto O, en elcn Ia fig. BB, determina la posición degiro buscado en la superIicie del camino.centro de giro.
la rueda delantera, y el02 por el eje geométrlcoque estos ejes se crúzanla proyección del eje deEl punto O se denomina
rio 87. Esquema de giro de un't-ractor con bastidor articulado'
Fic. 88. Cinemática de giro de un tractor* de tres ruedas.
La distancia oo2 desde el centro de.giro hasta el centro del
r,-r.ni. trasero acordamos llamarla radío de glro:
R : L ctg a, (t22)
Para tener la posibilidad de hacer cálculos comparativos, elradio de giro se expresa en forma relativa, tomando como'unidadde medición el ancho de vía entre las ruedas B. La relación
RP:7-se denomin a radio relatiuo de giro.
En la fig. 89 está mostrado eldos ruedas delanteras dírigidas.chen sin resbalamiento lateraly sin def ormaciones lateralesde los neumáticos, el centrode giro O debe estar dispuesto,como fue mostrado más arriba,en la intersección de los ejesde todas las ruedas. Para ello,es menester desplazar las rue-das dirigidas de la posiciónneutral a diferentes angulos,
giro de un automóvil quePara que todas las ruedas
Fig.89. Cinemática de giro de unautomóvil con las dos ruedas delan-
teras dirigidas.
caracterizados por las siguíentes correlaciones:
ctg o,n, : (r25)
siendo oinr Y oext: ángulos de desplazamiento de la posiciónneutral respectivamente interior y e.rterior res-pecto al centro de giro de las ruedas;
2a: distancia entre los ejes de los pivotes de direc-ción de las manguetas de las ruedas dirigi-das.
De aquí se deduce que 1a diferencia
ctg o.*, -- ctgrrnr: !debe ser un valor constante independiente del radio de giro.
Para obtener la correlación exigida entre los ángulos dext ya¡1¡, eS frecuente el empleo de un nrecanismo especial de cuatroeslabones, para girar los pivotes de dirección de las ruedas, lla-mado trapecío de dirección. Cuando la elección de los parámetrosdel trapecio de dirección es adecuada es posible obtener correla-ciones entre los ángLrlos dexr'y a¡1 suficienternente próximas a
Ias teóricas.
(124)
tienemat-
R-a , R+aL i Ctg(:¿ext:
L
;iendo L:batalla del tractor, m;o:ángulo de desviación de la rueda delantera de su
pos"ición durante el movimiento rectilíneo'En lo suóesivo, denominaremos esta posición de la rueda posi-
:ión neutral.El radio mínimo de giro R*rn depende del valor de la batalla
l.f i.t ñulo y del valor"máximo posible c¿,n¿* del ángulo de des-
;i;.ió" de la'rueda de la posición neutral. Generalmente q*á*::34 -v 45".
Ei radio mínimo de giro para el esquema mostrado en la
:ig. 87,IRmín:6"d, (123)
;iendo onráx: ángulo máximo al que puede ser desviada de lapoición neutral cadá sección del vehículo'
¿48 249

En los tractores con el ancho deciones se conservan con suficientecierta. posición dada de las ruedas,elegídos los parámetros del tranecibancho de vía entre las ruedas 'lascierto grado se violan.
vía regulable, estas correla-exactitud únicamente paraconforme a Ia cual fuéronde dirección. AI variar el
correlaciones requeridas en
de la fuerzaalrededor delt ransferenc i a
gitudinal del tractor y de giro der basticror arrededor der punto 02con una velocidad angularcu:á. El movimiento de avance de
cde, ;1:r bre
§ 2. Fuerza de giro; condición para conservarla dirigibilidad
Llamemos Ia resultante de las reacciones laterares del camino
su acción sobre el eje delanterode impulsiófl F'n, qle actúa endel tractor, y la-fuerza de resistradio OOl en Ia dirección desdese transmite a la rueda cielantera
arte en los sigLrientes cálculos.antener el movimiento uniforme
ilibra por la resistencia a la ro-
,:t;;f T"1 :[.il'fio: iJ'J:'::,"lmiento de las rLredai I que seopone a su patinaje late¡al.
pecto al punto 02. De 'estamanera)
o Mr.to ¿cosct
(((
(
(
((
((((
(
(
((
(((
((((((((((((tttt
La fuerza Z* también seequilibra por las reaccioneslaterales del camino en larueda dirigida. De esta ma-nera, la reacción lateral re_sultante, que crea la fuerza desigLriente:
Fig. .90.. Esquema de f uerzas que actúanen el eje de las ruedas dirigidás durante
el giro.
giro Pr, se expresa con la ecuación
,*: #* f p¡. g tgo. (126)
261
Para determinar el valorgiro del bastidor del tractormovimientos: de avance dedel puente trasero con una
250
Z*, descompongamos elcentro de giro O en dosdel punto D, del centro
as- \üáAr.__1-r [r.el"l ,!n
velocidad u en dirección del eje lon.
a

. . Pu.ed.en.tener lugar veiocidades más considerables de patinajelateral de las ruedas dirigidas al utilizar por completo o óasi pórcompieto sus fuerzas de adherencia 2,, con el camino en direccióntrans causa, la condición para conser\..ar la di¡i-gibili con frecuencia de otra forrna, más con\re-nient os, conforme a la que el giro del vehículo esposib condiclón de que
La fuerz una longit d,rplicada en del y dir do
opuesto al con -esta la
re sistencia en es co úe
es menor a la correspondiente fuerza de adherencia total de dosrucdas distanciadas la una de la otra.
§ 3. Influencia de la elasticidad lateralde los neumáticos en la dirigibilidaddel vehículo
nenmáticos, el movimiento de los ejes delantero y trasero se des-l'ían de la trayectoria por la que ellos se desplazarian si no hubieradeslizamiento.
lateral de los neumáticos, al punto O', dispuesto en Ia intersec-ción de las perpendiculares a lcs vectores de las velocidades Z:y /L A consecltenci¿ de ello, el radio de giro del vehiculo en lugarde R resulta ser R'. Su valor se puede determinar de la corre-l a-ción:
L : R' tg ór * R'tg (o - ó,),
ñtLtgór*tg(o-ó,¡'
V " 1V , tg o.o*,
Z,e ) Pe.
(t27)
(l2B)
La adherencia del neumático con el camino en dirección trans-r¡ersal. se dete.rmi¡a por el frotamiento del neumático en la super-iicie de la calzada, el enganche de las estrías de la banda de ro-ladura con el camino y el apoyo de! neumático en las Daredesaterales de la rodada. De esta trancra, el r,'alor de la fuérza Z,lepende de la carga normal que actúa sol¡re la ruecla v que larprieta a la superficie de apoyo, de la estructLrra del nórri,ático¡ de las condiciones del camino.
',52
(r2e)
253
de dcnde

Ya que los ángulosdeslizamiento lateraI clesiderable únigamente allos ángulos ¿ tampocoadoptar:
Comparemos el valor del radio
R:# -+, que resultaría en
Fig. 91. Esqucma de girodesviación Iateral-de
giro resulta dependerdas, sino también deg otros factores queneumd,ticos.
de deslizamiento son insignificantes v ellos neumáticos puede tene-r un valor óon-marchar a velocidades elevadas cuando
son grandes, aproximadamente se puede
pr: Lofó2-ó, (129a)
R' con el radio de girocondiciones análogas al no
haber deslizamiento tate-ral de los neumáticos.
Si ó¡ : ó2, entonces eldeslizamiento lateral delos neumáticos no ejerceinfluencia en el radio degiro y su valor R' : R.
Si ór ) ó2, entoncesR') R; si ór ( ó2, enton-ces, .Q'( R, o sea, en elprimer caso el giro secfectuará por uña curvamás suave que con lasruedas que no tienen elas-ticidad lateral, y en el se-gundo caso, por una curvamás abrupta. De esta ma-
(
((
(((((
(
((
(
t(
ttt(
(((((tttttttt
del automóviI con nera, a ConSeCUencia de lalos neumáticos. elasticidad de los neumá-
ticos, la trayectoria delno sól.o de la posición de las rhedos dirigt-la uelocidad de marcha, det radio d,e glroinf lugen en el desltzamiento lateral de- los
254
Fig. 02. Esquema del giro espontáneo de un automóvil:a-con capacidad de giro exceslra; á_con capacidad de giro lnsuflciente.
sólo a cuenta del deslizamientoo además del deslizamiento tiene
gravedad.d de giro excesiva (fig. g2,a),lizamiento lateral de'lñ ruedáss traseras a un ángulo ó2, siendose transforma en iurvilineo cono por el lado del automóvil deAl pasar a la marcha curvilínea
25ó

t0 origina una fuerza centrífuga, que da la componente lateral,í, dirigida en el mismo sentido que la fue¡za perturbadora Z.
)orno resultado de la adición de las fuerzas Z y P'" los ánguloslcl deslizamiento aumentan, Io que acarrea la reducción del radiolc la curva por la que marcha el automóvil. La reducción deladio de giro provoca el ulterior aumento de la fuerza centrífuga', como consecuencia, se acrecienta el deslizamiento. Si no seoman las medidas oportunas para restablecer el movimientocctilineo, como resultado, el aulomóuil marchard, por una curua.uyo radio disruinuírd constantemettte. Para contrarrestar el des-izamiento, el conductor debe girar el volante en sentido contrariola dirección de giro.En estas mismas condiciones, un automóvil con facultad de
iro insuficiente, para el cual ór ) 6z (fig. 92, b), comenzará a
rarchar por una trayectoria curvilinea con centro de giro en O,ispLresto por el lado del automóvil hacia donde está dirigida .larerza Iateral Z, que provoca el deslizamiento de los neumáticos.,a componente lateral pi ¿e la fuerza centrífuga, que se originaurante el giro, se opone en este caso a la f uerza Z y obstau\izaI crecimiento de los ángulos de deslizamiento lateral. Cuantorayor es la velocidad de marcha, tanto más elevado es el valore ia fuerzu Pí y tanto más ef icaz su resistencia al deslizamientoe los neumáticos. De esta manera, con ttna facultacl cle giro in''tficiente, el automóoil esta dotado de la capacidad de conseruc!rutomdticamente la marcha rectilínea.
De la comparación de la dirigibilidad de los automóviles coniversas facultades de giro expuesta, se deduce que una facultad: giro excesiva, particularmente a grandes velocidades, reduceL estabilidad de rumbo y crea dificultades adicionales al manejar
automóvil. Por ello, en los automóa[Les de turisnto se trata de'ner una pequeña insuficiencia de la facultad de giro. Esto segra por medio de una serie de medidas relacionadas con laitructura del vehículo que favorecen el aumento del deslizamientoteral de los neumáticos delanteros en comparación con ios tra-:ros; el centro de gravedad del aLrtomóvil se dispone un tantoás próxirno al eje delantero, para aumentar aqLrella parte de laerza centrífuga que se transmite a las ruedas delanteras; en los:umáticos de las ruedas delanteras la presión es menor qlle ens de las ruedas traseras, etc. Generalmente, la facultad de giro:l automóvil se elige de tal manera que la diferencia de los án-rlos de deslizamiento lateral ór - óz : 1,5 -- 2", a\ aplicar encentro de gravcdad del automóvil una fuerza lateral igual a
1,3-0,4) G. No se consideran racionales normas más elevadas: insuficiencia de la facultad de giro, ya que con gran desliza-iento de las ruedas delanteras se
-diiicLilta ét giro del aLrtomóvil,acrecienta la resisterrcia a la rodadura y aumenta el desgaste
: las cubiertas.
6
En Ios camiones la rigidez lateral total de los neumáticos
los ángulos de deslizamiento de 1as ruedas delanteras, que parauna exactitud de cá[culo suficiente en la práctica éstos puedendesp reci arse.
§ 4. Estabilización de las ruedas dirigidas
La capac idas siciónneutral dura Y \¡o dichaposición, en a, se ad deias ruedas a do la buenaestabilización, se puede conservar por largo tiempo el movimientorectilíneo sin intervención del conductor. En estos casos, se diceque el vehícLrlo <<mantiene bien el camiL-to>>. Al contrario, si lasruedas dirigidas tienen una estabilización deficiente, cualquierdesviación casual de las ruedas debe corregirse con el volante, loque ha vehtculo sea excesivamente fatigoso.Tiene stabilización de las ruedas dirigidasdurant estabilización de las ruedas dirigidasayuda por sí solas a la posición neutral alfinal del giro.
La estabilización de las ruedas dirigidas principalmente sebasa en la utilización de las diferentes reacciones del suelo queactúan en las ruedas pata crear los momentos estabilizadores co'
rueda s.El angulo de Ia inclinación lateral de las ruedas ye (f ig. 93, a)
es el ángulo de inclinación del plano medio de la rueda respectoal plano longitudinal, perpendicular a la superficie del camino.El ángLrlo de inciinación se considera positivo si la parte superiorde la rueda se halla más lejos del centro del vehículo que la in-ferior, como se muestra en el esquema.
Los pivotes de las manguetas de las ruedas se instalan coninclinación por dos planos: transversal y longitudinal. El dngulode íncltnacíón transuersal del piuote ?1," se muestra en la
fig. 93, a, el ángulo de incltnación longitttdtnal del piaote \,'j¡u, en
la lig. 93, ó. El ángulo yir, siempre está dirigido, como se muestra
257

:1,:l j"r.l:.Tj,IjiÍ: :1 ,.*l.:y,o,superior del pivote esrá dispuesto
3' :":'"1;1.1''.::r-'.:." d:l
I'.! "i' ó -á,¡ ;l ;;i"Ii;;;"á ;;iá \ í,n
::" ^.::".j1.: u^, !:: lt iy?, cu
1n do el extremo in ierior ¿"1
-pil""i. .!id
*:.f: :._,",, 9^.1:,lt_. g:] extremo r rp;;i;;; ";i;; il Ji'p ilJü' i n. r i1-
olspuesro delante del extremo superior: estando el pinado_en dirección opuesta el ánguló lí," ", negalioo.
E I d n g ut o d e c á na e r g, n, ¡ o 7, u'r"; r;l ;; "y..""" f fi u,il:r,::_¿:.,l^r.
9i{"rqcia entre las.distanciñ-2 t'ts',:i:r:l:r,::_p-o.,tq diferencia entre las aistanciis"2 \,pof laS partes latefales interiores de lnc na,rmÁli^^^por las partes laterales interiores de-los neumáticos en
en vista de la variación de Ios ángulos de instalación de lasluedas dirigidas y la falta de datos fiables acerca de cómo sedistribuyen las reacciones del suelo en la zona de contacto delneumático con el camino para diferentes instalaciones de la rueda.A consecuencia de ello, nos limitaremos a una evaluación generalde la influencia de diversos factores en la estabilización-de lasruedas dirigidas.
provoca Ia elevación del puente delantero
93, c) semedidasel plano
(((((tt(((((t((tIttt(
tttttttttttt
Uno de Ios factores que favorecen a la estabilidad de las rue-das es la inclinación transuersal de los píaotes. Al haber tal in:clinación, cualquier desviación de la rueda de la posición neutral
Fig. 98. Angulos de instalación dea-ángulos. de incllnacién de Ias ruedas e inclinación- lncllnactón tongitudinal ¿et püotel ;:;;,C,ii,;'
das. Pero al aumentar el ángulo de inclinación transversal de lospivotes, se acrecienta la resistencia al giro y, como consecuencia,se dificulta el manejo del vehículo. Este motivo limita el aumentodel ángulo analizadó.
puede ocasionar el giro de las ruedas alrededor de los oivotes yla desv I dirección prefijada demarcha b (hasta cieitos iímites)resulta la marcha y, al mismotiempo, a glrar la rueda.
las ruedas dirigidas:transversal del pivote; á-ángulos dede convergencla de las ruedasi
del vehículo. Esto se deduce del esquemaexpuesto en la fig. 94, donde con líneade trazos está indicada la posición dela rueda después de hacerla girar con-vencionalmente a l80o alrededor del pi-vote. De no elevarse el puente delantero,la rueda debería descender más abajode la superficie de la calzada. Para laelevación de la parte delantera del vehí-culo es preciso invertir trabajo cuyovalor, siendo iguales las condiciones res-tantes, será tanto mayor cuanto mayorsea el ángulo de inclinación transversalde los pivotes.
Así pues, el aumento de este ángulocontribuye a la estabilización de las rue-
Fig. 94. Esquema de girode la rueda con inclina-ción transversal del pivo-
te'
259
ro de ambas ruedas situadas ensitivo si.la distancia por la parteque pot la trase¡a.
componentes de las reacciones:eral y su posición en relación alr estos datos por vía de cálculos,
258
I
D'
-t

Durante el movimiento por una recta de la rueda inclinada,los radios de rodadr-rra tierien diversos valores en distintas sec-
los automóviles los ángulos más utilizados de incrinación son
y su resultante, como ha sido demostrado e.xperimentalmente,está desplazado tras el centro de la superficie de contacto a ciertadistancia b2. Cu anto mayor es la rigidez de[ neumático, tantomayor es (hasta ciertos límites) la distancia b2.
Así pues, la fuerza lateral resultante actúa respecto al eje delpivote en el brazo bt* bz; éste se llama brazo de estabilidad.
EI momento de estabilización, creado por las reacciones late-rales, se puede considerar como la suma de dos momentos, unode los cuales se origina a consecuencia de Ia inclinaclón longitu-dinal o bien del desplazamiento del eje del pivote, y el otro conroresultado de la elasticidad lateral del neumático. Habiendo unatendencia a reducir la presión del aire en los neumáticos ir a dis-minuir la rigidez de éstos, se acrecienta cada vez más la impor-tancia del segundo momento. De aquí surge la posibilidad dereducir los ángulos de inclinación longitudinal de los pivotes, loque es deseable para facilitar el manejo del vehículo. Por reglageneral sus valores son 0-2o en los coches de turismo en ocasio-nes se utiliza una inclinación longitudinal negativa de los pivotesde un valor hasta (0,5 -: 1,0)".
Un f uncionamiento normal del sistema de estabilización delas ruedas dirigidas depende considerablemente de la catidad delserv[cio técnico y dei estado del vehículo; la observación de losángulos de instalación de las ruedas y de los pivotes, en particu-lar de la verificación oportuna y regulación correcta de Ia con-vergencia de las ruedas, de la conservación de las holguras nor-males en las piezas conjugadas del eje delantero y del acciona-miento de la dirección y de las deformaciones que influyen en elmontaje de las ruedas.
§ 5. Noción de las oscilaciones angularesde las ruedas dirigidas
Se ha observado que durante el movimiento de los automóvilesen una serie de casos pueden originarse oscilaciones de las rue-das alrededor de los pivotes. Un fenómeno análogo ocurre en lostractores de ruedas al emplear en ellos neumáticos de baja pre-sión, sobre todo últimamente, cuando las velocidades de marchade los tractores se han elevado y ellos se emplean en alto gradoen los trabajos de transporte. Estas oscilaciones ptovocan lainestabiliclad de la marcha rectilinea, reducen la seguridad deviaje, ocasionan un desgaste acelerado de los,neumáticos y laspiezas de la dirección y elevan la resistencia a la marcha.
Las oscilaciones angulares de las ruedas dirigidas se provocanpor diferentes motivos y, como consecuencia, tienen diferente ca-rácter.
Uno de los motivos puede ser el desequilibrio de las ruedas.Si las ruedas no están equilibradas con suficiente exactitud algirar éstas se originan fuerzas centrífugas libres P. (fig. 96, a).
v
a
Fig.95. Esquenra de obtcnción del monrento estabilizador:
-con inciinación longitudinaI a"r oirot"i,ilot"lon desplazarriento longitudinal del eJe del
lesde 0.hasta f2'; en los tractores se obser\¡an ángulos de incli-ación hasta +4". El brazo de rodaje necesario se- obtiene prin-ipalmente a cuenta de la inclinacióñ transversal de los pivbtes;u valor se toma en los límites 4-B'.
También puede reducirse la tensión en Ia zona de contactoel neumático con el canrino eligiendo relaciones racionales entrers ángulos de inclinación y, la convergencia de las ruedas.
Otro métoclo para estabilizar las riedas es la inclinación lon-itudinal del pivote (f ig. 95, c), o correspondientemente, la insta-rción _de.l eje del pivote delante del eje geométrico de Ia rueda:ig. 95, b). Con cualquiera cle estas ,,iarántes la desviación de
)r es un tanto mayor que ó1. Al haber deslizamiento lateral, lasacciones laterales elementales del suelo se distribuyen irregu-rmente por la superiicie de contacto del neumático con la calzlda
0 261

Las componentes P* de estas fuea girar las ruedas alrededor ddesfavorable el caso cuando lasy sus fuerzas centrífugas estáncomo se muestra en la figura 96,
mediante una disposición recíproca más racional de sus centrosde oscilación.
muy complicado y aún no se ha esclarecido definitivamente. Unode los_ motivos que puede provocar este tipo de osciraciones sonLas relaciones giroscópicos que exis-
0
Fig.96. Esquerna de Ias fuerzas queruedas
al estar desequilibradas lasse oilglnandir gidas.
ten entre las oscilaciones que reali- d\,zan
las ruedas junto,con, el eje delan- /i/ .n"y las oscilaciones angulares de las l!l \f t:ruedas alrededor de los pivotes. Err T§,5üil f, l!H ,Nitero en el plano vertical-transversil, lll-Íll-_ ,,, [!
((;
(((-
((((_-,
(--
(((((((
totales de giro quecron y provocan ellas componentes P,ceo>> de las ruedas
Fig. 97. Esquema que ilustra la dis-cordancir cinemática de la suspensióny el accionamiento de la direcóión.
se originan son variables por su valor y direc-<<serpenteo» de las ruedai. Al mismo iiempo,de las fuerzas centrífugas provocan el <<cabe-en plano vertical. Cuanto'más elevadas sonlas velocidades de marcha,
tanto más sensible es la in-fluencia del desequilibrio de lasrLledas.
.. También pueden surgir os-cllactones angulares en las rue-das dirigidas en el caso de dis-cordancia cinemática entre losdesplazamientos que debe reali-zar el extrcmo articulado de lapalanca de giro de las ruedas,al - pasar por irregularidades,i'la trayectoria qLré éste tieneque circunscribir, estanclo en-
forma esquemática, el proceso de las '''=t\?oscilaciones puede ser representado rr'-á\\?
262
del modo sigLriente: ba jo la acde cierto factor externo, por ejeirregularidades del camino98,a), el eje delantero juntolas ruedas giran a un ánguloocupan posición inclinada; lasdas que giran a gran velocidad pue-de considerarse que son giróscopos, Fig. 9g. Esquema de las relacio-pot del plano d" s, nqS entre las os-iota aparición de mo- cilac e delantero enmen -i4;
iii¿. b-8,'9i, ij,, '*,J,'i;.,l,T,olque rar las ruedas di;iEid;s.alre votes, para con-servar de este modo su plano inicialde rotación; por su parte, el giro de las ruedas alrededor delos pivotes origina el cambio dé la inclinación del eje delanteroen el plano vertical-transversal; como resultado final se creandos tipos de oscilaciones de las ruedas relacionadas entre sí: enel plano vertical-transversal y alrededor de los pivotes. El mo-mento giroscópico que hace girar las ruedas alrededor de los pi-votes crece al elevarse el momento polar de inercia de las ruedas,la velocidad angular de las oscilaciones del eje delantero en elplano vertical-transversal y la velocidad angular de rotación delas ruedas en sus ejes, o sea, la velocidad de marcha del vehículo.
(
(
((_
(((((
P63

slonadas por las relaciones elásticas que se establecen entre lasruedas como resultado del deslizamientb lateral de los neumáticosy la en el plano de contacto con el camino que en¡ste I régimen de deslizamiento no es constante;ino con una regularidad y frecuencia determina-las. de ello, alrededor de los ejes de rotación de lasnanguetas de las ruedas se originan momentos de valor y direc-:ión variables, que son los que mantienen el proceso oscilatorio.
El bamboleo de las ruedas dirigidas puede ser contrarrestado:ligiendo los parámetros de estabilización, introduciendo resisten-:ias que impiden las oscilaciones, eliminando los juegos en eliistema de la dirección, etc,
i 6. Giro de un tren
:sbalamiento lateral.Analicemos desde el punto de vista mencionado el giro de los
'es tipos principales de trenes de automóviles y de tractores que)n mayor frecuencia se encuentran: un camión-tractor con semi-'emolque.(fig. 99), un tractor con remolque de un. eje (fig. 100),un camión con remolque de dos ejes provisto de un ar,-antrén
iratorio. (fig. l0l).En todos los casos, las trayectorias circulares del centro del
e posterior del remolque estdn desplazadas respecto a las trayec-rrias respectivas de los centros de los puentes traseros del ca-ión-tractor o tractor a cierta distancia C¿ como se muestra enfig. 99. EI desplazamiento de la trayectoria del remolque ejerce
ra influencia consíderable en la facultad de giro (maniobrábiti-rd) del tren, ya que éste aumenta la anchura B¿ de la zonalanda de la curva), necesai-ia para Lln movimiento libre duranteviraje. El desplazamiento de la trayectoria del remolque es
mbién uno de los motivos por el que durante el viraje las ruedas: remoique no van por la rodada de las ruedas del tractor, in-uso siendo iguales las vías entre las ruedas. Por esta razón, se:recienta la resistencia a 1a rodadura del tren, particularmente,nsiderable durante la marcha por c4minos defectuosos.
,{
Fig. 99. Esquema de giro de un tractor con semirremolque'
§I.s
€
l_L
Fig.100. Esquetna de giro de un trac[o¡ con rcmolque de un eje'
265

del t¡actor (camión) y el re-ivamente. \ -' r
,despiazamiento cle Ia trayecto_
: J.:1: l" : J i,#,iJ,L,....,Sl *1ffl,."*:+: R-Rrem
- l Rr".R R - , - l- (lB0)
es &/¿s de los pard.me,tros. más característtcos del tren.Durante el siro el talor áei;..pi;;.*iento de la trayectoriadel remolque ar"principio crece a..á'.-...o, en er primer niomento
ii."il, ;,s.'li:::tl;.' H : "#266
El valor absolutoremoique
del desplazamiento de la
Ca: R - R.u.,
trayectoria del
((((((( t
miento de Ia trayectoria del re-Sr., y, por lo tanio, es-mayor t,del corredor.
Ba:Rra-R¡a.
Bad:2Rra * A.
(t3l)
(132)
({(l(r
Ya que el radio de la dimensión máxilna cxterior Rr¿ se de-termina por ra travectoria dai t;;i;; (camión), cr remoique noinflu¡'e en Ia anchúra de Ia ounár-ir¿iJü;;;iá'p;rá.ii?rr.
II
(
It(
IItttt
Fig. l0l. Esquema de giro de un camión con remolque de dos ejes.
267

EJEMPLOS DE CALCULOEJemplo l. Un t¡actor de ruedas con las delanteras dirieidas. sira con un
tntttolque de un eje sobre un te¡reno horizontal llano, con iádic'cónstante deglro mínimo posible para dicho tractorR^¡n:5 m (f ig. l0C).
Se requiere determinar la dimensión máxima de la anchura B¿ Ce la bandarlc giro, que se necesita .para la.ma¡cha del tren, suponiendo que el centro de¡lro del remolque coincidé con el centro O de giro d'el tractor'y que por cadalndo de Ia banda de giro deben deJarse zonas-de protección de Lna'anchura/ - 0,45 m.
Datos iniciales: batalla del tractor L : 2,4 m; dimensión máxima de la
ro de giro. E[ arco exterior aa pasa por el radio R¿r a través del punto delractor más alejado del centro de giro, y el arco interior bb pasa poi el radio?¿: a través del punto del remolque más cercano al centro de gíro. Teniendo en:uenta
_ las zonas de protección la banda de giro está timitada por los arcos
{a' y b'b'.De acuerdo con lo expuesto, la dimensión máxima buscada de la anchura
le la banda de giroBa: R¿L - R¿, t 2d.
De las correlaciones geométricas se deduce que el radio exterior de trafi.abilidad horizdrital del tráctor
Ru,:+*#+ (o,bre.d-a).
iendo o"*1 - ángulo de desviación de la rueda dirigida exterior de la posl-cióp neutral.
Su valor se determina de la condición que
R-,.+a 5*0,55ctg cru*, : --nÍ- x 2,jl , de donde o"*¡ = 23. 20'.
ustituyendo el valor cos c¿ert : 0,92 en la primera ecuación hallamos que
t, : !*#E * (+ - o,sb) : G,26 m'
.. De ,io¡ma. análoga-. determinamos de las correlaciones geométricas, que elrdio interior de la traficabilidad horizontal del remolqr,e
Ror: VRh" + 4* - ¿',.^ - o,5.Bcaj : ^rt?ily-i/ - l,l : 3,25 m.
La anchu¡a buscada de la banda de giro
Ba :R¿r _ R¿: * 2C :6,26_ 3,25 + 2. 0,45 :3,91 m.
Ejemplo 2. Un a conser-rndo durante el vir m/h. Etrdio de giro varia d iinal de
primera f ase. del S iro, des-lés de lo cual el ra cu:va.
Se requiere determinar la trayectoria de movintiento del cenlro del puenteasero del automóvil en todos los sectores Ce la curva en el viraje.
Datos iniciales: batalla del automóvil L : 3,5 m: en los seciores de tran-ción de la curva del viraje (la primera y la tercera fase) la desviación de la¡
i8
r.uedas dirigidas del automóvil de su posición inicial se efectúa con uná velocl-dad angular constante; cada uno de ios sectores ¿. tirnri.ioñ á."tá"'Jrrr, ¿.giro .el .automóvil lo supera durante el tiempo /t, : l s; lu iñiuen"iu a. l,elasticidad de tos neumáticos y ti'susp.n!ion'.n iá trry.iioiir'áái-[iio-.. a.r-p recia,
Determinemos a qué velocidad angular e:+ se e[ectúa [a desviación de(!tlas ruedas dirigidas del automóvir en los sectores de transición de la curva deglro.
Fig. 102. Esquema para el ejempto 2 det capituto VIII
. Teniendo en cuenta que de acuerdo con la ecuación (122),
^LL(mín:lgro = or,siendo o¡: ángulo.conrpleto de desviación de las ruedas dirigidas de sLr posi-
ción inicial durante el paso por el sector de trañsición, hallámosque
,_ oo L 3,3',t :
É :
"*J-; : Sdlr : o' I I I /s'
rue 'llt?;AÍi"o:i.";'.??i .i;:'ij'.1',1?;del do¡ de iu centro instantáneo de [iroa u ngitud
ds : Rdo,siendo (: radio instantáneo dre giro; en cada monrento de tiempo, contado des-
de el conrienzo del giro, R: É... Po, otro lado, dLrrante el movimiento uniforme del autonróviI a una velo-cidadu
ds:t,ttt.Resolviendo en conjunto ambas expresiones de dS, hallamos que
or:+ú:+atú.
269.

Respectivamente el ángulo 0 en radianes, al que se desvia el eje longitudi'nal det automóvil de su dirección inicial durante el período de tiempo /, será
Al final de la primera Iase del giro, cuando el centro del puent-e traserodel automóvit se de'splaza de la posiiión inicial / a la posición 2 (f ig. 102),el ángulo 0 alcatrza el valor
t?- 45 12oz:ttd'i: es'o'll z.¡¡:o'208 rd = 12o'
Analicemos la forma de la curva de transición I-2. Al desplazarse cual'quier Dunio de la curva a un arco elemental dS, las coordenadas de este puntose desplazarán a segmentos elementales dx por el eje de abscisas y dy pol eleje de ordenadas, cuyo valor
dx:dscos0=dS:odt;dg:dS sen0= dS0:o1dt.
Respectivamente las coordenadas x e g del punto analizado tienen un valor:
o: tae: l+u, at:IaS.00
Icx:\udt:ottJ0
tt
u: t oer,: I " (t u i) o, : * "r.00Excluyendo dc las expresiones obtenidas el tienrpo, obtenemos la ecuación
de [a curva de transición 1-2 en la siguiente forma:
, : -o- *'- (A)Y- 6aL*'La posición del punto final 2 del primer sector de la curva de giro se deter'
mina por las coordenadas:
xr:otr,:ah l:#:12,5 m.
,,:#u,?,:l?!f$l = 0,87 m
Ahora hallamos las coordenadas x6 e g¡ del centro O de la circunferencia2-3, por la que se desplaza el cenlro del puente trasero del automóvil en lasegunda fase del viraje.
Ío:fr2-R.ínsen0, = xr- R^inlr:12,5- 30'0,208:6,26 m.
Uo: Az* R*in cos 0, = U2 * R,nin:0,87 + 30: 30,87 m.
En la tercera fase del giro el automóvil pasa a una línea recta y [a trayec-loria 3-4 del centro del puente trasero es idéntica a la curva 2-l de la pri-mera [ase. Et punto 4 está dispuesto a una- distancia x6 del centro de giro O,
v el punto límite 3 en el que la segunda fase del giro pasa a la lercera, se
Éalla'a una distancia x2 sobre el punto 4.
Con[orme a la ecuación (A), a los sectores de transición de las curvas de
las carreteras comúnmente se le da la forma de parábola cúbica u otras curyascercanas a ella por su coniiguración (lemniscata o clotoide).
270
Capítulo IX
((t(t((((t((((
tt(ttt((((((
((
(
t(
ttt
§ l. Cinemática del giro
Giro de los tractores de oruga
u2 : op(R + 0,5 B); a,: op(R - 0,5 B), (133)
271
siendo B : ancho de vía del tractor.Hallemos la relación entre el radio de giro del tractor y la
frecuencia de rotación. de_sus semiejes mot?icás,-ii, -¿.i"u¿.rrn-
tado, y n¡ del retrasado. Teniendo eri cuenta q;; i;. uáio.iar¿..
_-a

de avance de las orugas sin patinaje y resbalamiento son propor';i";r1.. a las Irecueñcias cle'rotaci-ón-de Ios semiejes respectivos,
l,oián,lonor en Ias ecuaciones (i33) tenemos la siguiente depen-
dencia::j-:!:-- 8+o'58xy n1 R - tl,o8 '
de donde
o bien
(13aa)
( 1 34b)
siendo p : +: el así llamaclo radio relativo de giro'
Por su parte, la correlación entre las velocidades uz Y ?t,o respectivamente entre las frecuencias de rotación n2 ! n1 de'
,,ll
l1¡
'1t
, rlll
rll
rr'{l
'rt{l
'tl'{f{ro
Fig.103. Plano de velocidarles de lrn tractor de.oruga riuran[e el giro establepor un sector horizontal del camino'
pende de las particulariclades cinemáticas de los mecanlsmos de
cha rectilínea (f ig. 104, a).
272
2. ['lecanismos con enrbragues de giro o transmisiones plane-tarias de un escalón, con los cuales el senrieje adelantado con-serva en la curva la misma relación cinemática con el árbol motrizdel puente trasero que antes del viraje; en este caso (fig. 104, b)
la oruga adelantada (fig. 104, c).En la fig. 105 se muestia el esquema de un mecanismo de giro
con un diferencial simple. El diferencial está dispuesto entre los
0óFig. 104 CaracterIsticas cinemá ticas de distintos
tractores de oruga:
a -diIerencial¡ á-mecanlsmo de giro con embragues derlas de un escaión; c-mecanlsmos
c
mecanismos de giro de los
frlcclón o transmlslones planeta.comblnados.
(135)
273
semiejes motrices 1 y 2 de1, tractor y se convierte en mecanismode giro al combinarlo con los frenos 4 y 5, instalados en los semi-ejes. Durante la marcha rectilinea ambos frenos deben estardesacoplados. Siendo aproximadamenie iguales las resistenciasen las orugas derecha e izquierda, los satélites 3 no giran sobresus ejes y ambos semiejes del tractor girarán con igual frecuencia.
ft¿: flt: frd,il,
siendo ftdi¡: f recuencia de rotación de la caja del diferencial.El giro del tractor se realiza frenando el semieje retrasado.
En este caso, los satélites comienzan a girar sobre sus ejes ycomo resultado, la frecuencia de rotación del semieje retrasadose reduce, y la Irecuencia de rotación dei semieje adelantadoaumenta en igual medida; de este modo, la semisuma de las fre-cuencias de rotación de am'oos semiejes siempre es igual a lafrecuencia de rotación de 1a caja del diferencial. De acuerdo conesto, la ecuación (134a) adopta, para el mecanismo de giro conun dilerencial simple, la siguiente forma
R:B ndll
.' llz - llt
lQ 3ax 5a9

el freno está apreta.do hasta el tope y el engranaje del freno nogira, el radio de giro del tractor -serz
el minimo. En este caso,por una vuelta de la caja del diferencial los satélites girarán al-rededor de sus ejes {} vueltas, sienCo z¡, el número de dientesdel engranaje del freno, y 2.., el número de dientes de los satélitesexteriores. R,espectivamente, los engranajes de los semieles haránadicionalmente 'Í' zs
.". : ' "o vueltas, siendo e, el número de dientes
(ti
iI
I¡
(((((((((ttttttt(ttt(te
tta.
tttt
Fig 105. Esquema de un mecanismo de giro con diierenciar simple.
quier radio de giro, comenzando por el máximo Rr.áx: ñ (mar-cha recti[ínea) hasta el mínimo,
Rmín: B !!L ,
al quedar .parado, el semieje retrasado. ya que párá rl¡ : Q,sem^ieje adelantado gira con e[ número de'revblucion., n,- 2n¡r, entonces
Fig. 106. Esquema de un mecanismo de giro con diierencial doble.
de los saté ro de dientenajes de lo e retrasaclocontrario a la caja delsemieje ad cción,' el prhará por una vuelta de la caja clel diferencial I - ..2t, . z"
vuel-tas y el segundo l++.3 vueltas.
z''e zo
's, e 'o
1l zf'
'ztfr2_" zr.u zo:l+¡rl _i¿it*lnt ,_ zr, .zs l-ldrl i¿i¡-l
2", e zo
el:
R.in:0,58. (136)
274l0r
275

Teniendo en cuenta que con tal relación ff a giro del tractor: realiza con el radio mínimo, obtenemos del plano de velocida.:s del tractor (fig. 103) la siguiente dependencia:
Rmin + 0,5,8 idli + I
";-58-
: ¡u -, '
: donde
Rmrn:0,58i ¿1¡. (137)
La relacién de transmisión de los diferenciales dobles se tomarr regla en los límites lau - 2,7 :3.
De la ecuación (137) se desprende que e/ radto mínimo de gtroun tractor con diferencial doble depende del aalor de ta reta-
1n de transmisión del diferencial. El giro del tractor con di[e-ncial doble sin movimiento de avance es imposibie.
Fig. I07, Esquema de un mecanismo con embragues de giro.
Del análisis cinemático expuesto se puede apreciar que en loserenciales dobles, así como en los simples, la disminución enrto valor de la frecuencia de rotación de la cruga retrasada varmpañada del aumento de la frecuencia de rotación de la oruga:lantada en el mismo valor. Por esta caLlsa, es posible admitir: la deducción acerca de la conservación de la velocidad mediatractor en la curva igual que con la marcha rectilinea antesgiro en las mismas condiciones, es a¡slicable para los meca-
mos dilerenciales de giro de cualquier típo.Los mecanismos de giro del segundo grupo tienen una utiliza-n pi'edominante en los tractores de oruga. Examinernos prime-lente la cinemática de giro al emplear en calidad de mecanis-s de glro embragues de fricción (fig. 107). Los embragues /:ombinan con los frenos 2.Durante la marcha rectilínea del tractor los embragues de¡ deben estar acoplados y los frenos aflojados. Si los embra-¡s nQ resbalan, ambas orugas deben moverse a igual velocidad.En las curvas el embrague que une el árbol del puente traserola oruga ret¡asada se desembraga parcial o completamente
En una serie de casos para ¡ealizar el girodel desacoplamiento del embrague, tambiéntrasada.
la marcha rectilínea, hasta el valor mínimo fl,¡:0. A medida deque disminuya la f¡'ecuencia de rotación nr el radio de giro, de
se requiere, ademásfrenar la oruga re-
acuerdo con la ecuacióntiene un valor mínimo:
Fig. 108. Esquema de un mecanismo de giro planetario de un escalón.
(l3aa), también se ¡educe ! cofl n¡ :
Rrtn: 0,5-B'
En los tractores con embragues de giro la velocidad media delmovimiento de avance en la curva
tll':tt RR+0,58'
es decir, que en la curva ésta es menor que durante el movimientorectilíneo; siendo R:R,nin, ella tiene un valor mínimo ol,n:0,5u.
De las diversas variantes de mecanismos planetarios de gironos limitaremos a analizar el esquema de un mecanismo de unescalón único que se mnestra en la fig. 108. El mecanismo tiene
¡', a través de éstas, con los semiejes del puente trasero. Además
277

Fig. 109. Esquema que ilustraorugas en
Iael
influencia del resbalamiento y patinaje de lasradio de giro del tractor.
fetrasa en una Sfreno d espondienm[ento o analízafuncíon ecanisfiLoya que Ia liberación parcial o cplanetario produce e[ mismo efcompletamente el embrague de giro.
Los nrecanismos, de -giro -c&nbinados del tercer grupo no seemplean en los tractores-agrícolas t, p;, elio, no serán aquí e¡a_minados.
Al considerar anteriormente
§ 2, Momento deresistencia al giro
Cuando. las orugas gi- FÍs ,l^lp._!lcuema,para determinar el valoralrededor de loé ooñ" del moniento de ¡esistencia ct ¡i.nran-¿lrededor de loé pol?s del momento a'. ,esistáñciá-ii iiro.Ot Y Or,
"ntr.-f rr áIr"gátY el camino qrrrdah t,,^-,[,ii,iíX 1,11 ::ru":i" :*,.,,,._,9: f ror a m i en to y otras rea ccion esi;l'::'ff ,.:l; J.oi o:r :n u r gilo'É; "¿i"
:1!!'", #'3:, J,ii;:';X:;mento rte reqicra.^,".I,1i _r,g:pladas en el párrafo ante.iái,
-ál mn-
:T[:,, 3l ^l::": ^ El ._1, .,.,o i, ¿-,' IJr.,i r o, p rr.,
i:::t"o.oi,':i:¡,'"i:'j",ils:;;^lt,i;:;;":;#':i,?:JxJ;:':i;,'J,il;.3 i i $:'.1 #1 t',',1 :a t* T i
j i:* j j 9i
: J lüi ;'á:'. fl ' ; *'o ; :'": I !'#;
Í :, lS'#; I,fl j j¡j L*¡ i 9_¿ :j;' i,,,¿ ;, ü jül: T i:5 J# T ?
Í ; ",,¿
r,o.,,.",
" 3.., * f
, :* *1 ; Jg. i : I ;.' : :,. ;; ",';,.ii;r
e.ilfl .X,,j¡,T
::' r;:,rlJ" sm i té p o r ca a, u rB
" á; ;t*' -;.i;J¿:' "; i';ii?:li,Í,:de apoyo
:?: i",:? ;' T : i';' ; 1",1: "l
:, "
I :"1
-j I ;i.ir:'iil'ih : x, : T : ; : ."# ?x:
dG:
((((((
(
((((
(
((
It(
(
t(e
tttt
0,5c--i-- d.u,"oroz(t - ór) * u, (l- ó,)
uz(l-ór)-r,(l-ó,) siendo 0,5G:t_LOr
-
Peso que corresponde a cada oiltúAlargura de la superficie de ,p;y"o-¡. la oruga
-+J
278
,i t.,'R':0,58 :-+:0,58O¡ - U
'
-t

Se supone que el peso del tractor se transmite en igual medidalas dos orugas.
La fterza elemental con la cual cada uno de los sectores toma'
elemental de resistencia al girocon brazo r, el momento totalde resistencia al giro M, se
expresa con la siguiente ín'tegral:
VGLoI
(138)
se reduce el valor del coeficiente ¡r. Como resultado de ello, sidurante las curvas abruptas (p = I ) el coef iciente ¡r tenía suvalor máximo en un campo arado, en curvas suaves (p - l8) suvalor en suelos blandos resultó ser menor que en los duros.
En los cálculos aproximados el valor del coefliciente reducidode [a resistencia al giro con diferentes radios de la curva se puededeterminar por la fórmula empírica del profesor A. Nikitin,
Itmáx
'L- a+(l-a)(p*0,5)' (13e)
siendo F*áx:valor máximo del coeficiente de resistencia a1 giroen condiciones determinadas del suelo para R :: 0,5 B; a :0,75 + 0,9, en dependencia de lascondiciones del suelo.
Los valores de ¡r,nr" calculados se
0,7 para los caminos de superficie duraen caminos húmedos y cubiertos dehielo el valor de frmáx puede ser con-siderablemente menor.
Cuanto más duro sea el suelo cnel que se realiza el giro del tractor,tanto mayor debe ser tomado el va'lor de a en la fórmula (139), ya queen dichos suelos, como se ha indi-cado más arriba, el aumento del ra-dio de giro ejerce una inf luencia me-nor para la disminución del coeii-ciente de resistencia al giro que enlos suelos blandos.
Consideremos el giro de un trac'tor de orLlga con remolque en las con'diciones de giro antes adoptadas. Laf,uerza exterior adicional que actria
\
\
\\
r\
i\
t\
\)\
\\\\e
o=L.B,. lll. Deoendencia del coeficiente'resistenci'a al giro ¡.t del radio rela-
tivo p de giro:
en bald[os; f-en rastroJeras; 3-encampos arados,
U.5¿^-'.'' o.sc
illu: 4 \ yt -¡-x dxJ "of0
De esta manera, el momentode resistencia al giro del trac-tor es tanto mayor, cuanto máspesrdo es el tractor, más lar-gas sus orugas y cuanto mayqrés el coeficiente reducido deresistencia al giro.
Al deducir 1a fórmula (138),hemos despreciado la influen'cia ouc eierce en la resistenciaal giro lá anchura de las oru'gas.
El valor del coef iciente deresistencia al giro p dePendede las propiedades mecánicas
toman en los límites de
a 1,0 para suelos blandos;
I --n
:va 3 en un campo arado. Como regla general se observa unarsiderable disrniÁución del coeficieñte ieducido de resistenciagiro a medida que aumenta el radio de la curva. Al aumentarñdio relativo dé giro en los límiies Q:1,0,+ l8' el coeiicientese reduce 3-5 véces, en dependen'cia de las condiciones del¡lo. Cuanto más «blando>> es'el suelo, tanto más intensamente
)
I
\t'
\\
\ Ix-
l_\
281

del centro de presión del tractor
transversal de la resistencia derovoca la aparición de reaccíonesen equilibrarla.ia conjunta de ambas componen-en las reacciones lateraies del
calcuent¿ iión h,
no influye considerablemente en
mados- -y en particular en losn la.fórmula^ (taO) p_t ysiguiente:
Mt",:E? -f pg^n sen !/gan. (l4oa)
,_^Il,ángrlq y, qr.. determina. la dirección de la resistencia derracc¡on en el gancho durante Ir.,,iri depende de la estructuradel remolque, "del rno¿o- A-J '!r""'"'
Me: k!e!2:- (l s8a)
\.
esquema dado no se tlene ., J_cuenta er desplazami.nto ró.ngiü-',..1,JJ'.;. ii,u.u,:.Í"rr*,'".#Jildinal del cenfro de giro der t-;;;- "" or. de ¡uüdas ae' Jós
";us.tor, o sea, se toma -olre p, :-R.
(r 4t)
(((((
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
((I3
3
El momento resultante de Ia resistencia alla suma de dos momentos: el nrorr,en[á .4,f, yl^o1 l.a luerza Pgrn Sefl y en relación al centrOzOt). Teniendo"en cueirta el vaLor-Ml por lanemos:
M,u,: k LLc:"' f Pgan sen y (lgun - rpor), (r 40)
siendo lgan:distanci¿ Iongitudinal desde el punto de enganchehasta el centio de las superficie!- á" *.r;'Le las
. :1,.1,,""11",:,:ii:?.i,ii ;":ii:,§ll?j;,,1,,-,,1llia ¡clicícnes comunes de-giro clel trac?or conc coeflciente ft es menor q-ue la uniclad y pocoS
Tampoco .existe un método seguro para calcular el valor derpor del desplazamiento rongitudiñr de'ros p"L"r'áL lirá-¿. tu,orugas. según datos experinJentales, con roi iuáio. .ár?.t".ri.ti.o,de giro R > zB para 'el trabajt á. -i;,
trrcióiás- , jri.ot'rr, .t282
de donde
Rucosy*/¡seny:R, sen y - /5 cos Y -
¿gan,
sen!z R(/grn*/u)' nz+fi
t,.n*,,o^lo=,:,lqyi^d: 11 baira de, acoplamiento det remolque.Si el '?I:l::.*":,9"._:lli{.;tü:í,ti':'Jii,óffi f :!liE;,,mente al , i: :p:, 1n : g i,11 t e uir a a, t iciilá c ián :; ; ;r;íb:l" ilii.,i,il:
$¿"i, T .l.l l:,1,A, (' tii ; ; ;;t.- ;; ; ;' . ;' ;'¿ b: "; i"'n i;." 1,' i,':;T,.?de la barra /¡ : 0.
283

3. Motnento de giro
Para vencer el momento de resistencia al giro es imprescindi': el correspondiente momento tie giro. Este se obtiene creandolas orugas adelantada y retrasaCa diferentes fuerzas de trac-
in. Paraleterminar el valor del momento de giro IvIr utilizare'rs el esquema de fuerzas, expuesto en la fig. 112, qr-te actúan en
tractor durante el giro estable ccn remolque.Designemos la fuérza tangencial de tracción de 1a. oruga ade-
rtada -por Ptez y la retrasada por P1r1; durante el giro ellas:nen diierente-valor y, en ocasio tes, diferente di¡ección. Al girar,resistencia a la rodadura es mayor que con nlovimiento recti-
.eo, pudiendo ser distinta la resistencia a la rodaciura en lauga
'adelantada y en la retrasada; de acuerdo a ello, la resis-rcia a la rodadura del tractor está representada en el esquemar dos fuerzas de diferente valor: P¡z en la oruga adelantada,P¡1 en la retrasada. Además de las fuerzas indicadas, en elrctor actúan el momento de resistencia al giro lVIn y la resisten'r de tracción en el gancho Pg^r,.Escribamos las condiciones de equilibrio del tractor respecto
los polos de giro de las orugas Ot Y Oz, conieccionando las
luientes ecuaciones de los momentos:
¡zB : PpB * ,&fp * Pgan Cos 1,0,58 f Pgan sen 1 (lgon - rpor)i 042)
118: PirB - M, * Pgan cos 1'0,5.8 - Pgun sen 'y (lgun - fpol).
Restando miembro por miembl'o de la ecuación superior la in-'ior, obtenemos
(Pte, - Ptsr) B * (P¡r - P¡) B -2M,"",donde se deduce que el momento de resistencia al giro l}lr.. se
nce por el momento de giro cuyo valorNIu:¡,59 [(Pr*, - P,u,) * (P¡r - Pr:)I. (143)
esta suposición es posible determinar el valorgiro y'/u por la fó¡mula simplificada:
Mc:0,58 (Ptgz - Prer).
La diierencia Pt"z- Pt., es ttna magnitud regLrlable y se crear la acción del -rnecanismo de giro; la diferencia P¡¡- P¡zige independientemente y depende de las condiciones de giro.Ál ser la diferencia P¡t- Pru positiva, aumenta el momentogiro del tractor. Su influencia es más apreciable en curvas
ruptas con las marchas más baj as con gran catga en el gancho,ando a causa de 1a componente lateral de la resistencia de trac-n l1a calga mayor qLte
I ciente de resistenciaa es maYor a causa dec ro de ambas orugas.En las condiciones de explotación más ltsuales 1a diferencia
-P t, no es tan sustancial, por ello para Ia seguridad de cál-os adoptamos Plr x P¡z: 0,5 f*G, siendo f* el coeficiente deiistencia a la rodadura del tractor en la curva. De acuerdo con
I
Para determinar el valor del coeiiciente de resistencia a larodadura del tractor de oruga durante el giro es posible utilizarla fórmula empírica siguiente:
" ,Í,, l5_\ 044)ls:l(t-1-lE+p/,
siendo l: coef iciente de resistencia a la rodadura para el mo-vimiento rectilíneo en las misntas condiciones;
P : radio de giro relativo,El aumento de la resistencia a la rodadura durante el giro se
provoca principalmente por los siguientes motivos.l. Durante el giro los rodillos de apoyo se aprietan a las vías
de guía o a los ¡ebordes de Ia cadena, y, como consecuencia, entreellos se origina f rotamiento seco de rodadura.
2. Una resistencia adicional a la rodadura, especialmente ensuelos friables se crea por la tÍerra empuj ada por las orugas, quepenetra en Ias superficies interiores de éstas y dificulta la roda-dura de los rodillos de apoyo por la cadena.
3. En curvas abruptas en suelos friables tiene cierto vaior elaumento de la resistencia frontal de las orugas a causa de que secrea una rodadufa más proiunda.
Determinamos cuál debe ser el valor de la fuerza tangencialde tracción de cada oiuga durante el giro. Para ello dividamos laecuación (142) por el ancho de vía B y, como resultado, obtene-mos:
Ptg: : P¡: { 0,5Pgr. cos } a llp * Psun selY (/g'n - 'pol) -
Itl _:0,5P,*. u * -jc;Ptgr : P¡. f 0,SPgarcos y -
¡[p+ Ps¿nsenY(Isrn -xpol) -
¡tl -:0,5P¡g. . - --F,siendo Ptg. e: Íuerza tangencial de tracción total desarrollada
por el tractor marchando pot una curva con cargaen el gancho.
Al deducir estas fórmulas se ha tenido en cuenta que, deacuerdo con Ia suposición hecha, P¡t: P¡z:0,5 Pt.g, siendo P¡.gla resistencia total a la rodadura del tractor durante el giro y que0,5 Pt e * 0,5 Pgan Cos y : 0,5 P1g. g,
La luerza tangencial de tracción de la oruga adelantada P¡*2siempre tiene valor positivo. Para que su valor no exceda de los
del momento de
(l 43a)
,t
r¡
f\
f\
\\f\
\¡tt
ñ
aoat
285

limites permitidos por las condicic'nes de adherencia de las orugascon el suelo, se debe limitar la relaciór +, razón entre la lar.gura de la superficie de apoyo de las ofugas y el ancho de vía del
tractor. En los tractores de oruga agrícolas la relación * ,"toma en los límites 1,2-1,5,
,En.lo que. se refiere a la fuerza de tracción de la oruga retra-sada, dependiendo de las condiciones de.giro, ésta puede !er posi-tiva o negativa. La condición Prs.
", +,imprescindible paraque gl giro pueda ser realizado sin crear una fuerza de traccióunegativa en la oruga retardada,mente cuando el tractor marchaeste debe desarrollar una considción P1*. *. Cuanto más duras soMr..), tanto mayor debe ser en
Marchando el tractor en vacío la condición pts. ,r+ puederea.lizarse predominantemente en curvas suaves con un radio re-lativamente grande, cuando el momento de resistencia af giro noes grande.
§ 4. Intluencia de los mecanismosde giro en la distribución de los momentosde impulsión entre las orugasy en el valor del momento de giro
Examinemos los mecan.is.mos de giro en la misma sucesión quefue hecha durante el anátisis de la éinemática de giró. páiu ,i*-plif icar la exposición.se adoptará, como se muestra"en Ias figrru.,que las ruedas motrices de- las orugas están instaladas áñecta-rnente en los semiejes, Al haber tránsmisiones finales ss debentener en cuenta sus relaciones de transmisión y rendimiánto.. comencemos por el dife'enciar más senci[ó (fie. 105). si sedesprecia el rozamiento en cl diferenciar, entoncbs-el cliíerencial
tracción de la oruga P1*1. De acrtangenciales de tracción-de las orugas tienen durante el viraje losvalores siguientes:
p ^---o'SII¿¡i . . o'5'¿fdlr - ilIr. Í,rig:: \ i I,rsL:--;..:.
286
9:::" :., I l:g^1 l,p_.y r,1 1 I a s exF resion es obten i d a s, I a [u erz ¿r
\-omo se pue0e aprecra.r en las expresiones obtenidas, la [uerz¿r
:i,:s"T :il_d".- I:":.^' :: f :]I : : : gl
I"i.u *u á u-á,1; : ;;;: iü i.n t, u.li:,:1.:"^T::lo $,e
frolaqiento-det .freno r. ;-<l5 ¡i;,'áli'j'lipositiva; cuando M,. t ) 0,S M¿1¡, ésta es n"guiiuri
-'- .-¡ou s'
A causa de la desigualdad áé tas fuerzas" tangenciales de trac-ción P¡rz y Ptc,t se oiigigina el rnomento de giro M*, cuyo valort) se expresa con la sisuienté fórmula:según lá eóuación (la3a) .. .*pi.i, .", lr-.igui.niÉ'iiiá"rl*
Ms:0,5(P1g2-pts.,) B:Y [0,5M¿rr - (0,5M¿rr _ M,. t)l:
:T Mr. Í,. (146)
({-
((((.
(
M.: o'58 A,l.
'f(t47)
287
(
(
((
((
(
(
((
(a

De la fórmula expuesta resulta que el rsalor ento de
,í,-riináó por et d[ferencial doble,'depende del apriete
tl'fieno (momento'M,.t). Este es i¡¡1 aeces tn el mo'
t*to de giro creado coi el mismo momento de con un
miorugas.'-Á- ¿i?...n.ia de los mecanismos diierenciales, los embragues
oiro durante la marcha rectilínea del tractor distribu-ven el mo-
:ñ[o ¿. impulsión entre las orlrgas proporcionalmente a las re-
;tencias aPlicadas a ellas.--puiunt.'.1 giro estable la distribución de los momentos de im-
lléá entre lis orugas depcude de cómo se efectúa el giro: sin
in* lo orttga retralada o'[rcnándola. En el primer caso, e[ mo-
oo
mento Mf*'ose distribuYe
que se transmite al puente motriz durante el giro
entre las orugas de la siguiente manera:
Mrmp I : Membi M¡rpz: Mfl,lto - M"tb'
siendo Memb - momento de frotamiento del embrague dispuesto
Por el lado de la oruga -retrasada'El momento'a. iiió-re regula v-ariando el momento,de frota-
,ni*io-'á.1-embragrE ia .n .oit..pondencia con la fórmula (la3a)
tiene el valor siguiente:
rtre :0,58 (ry - }3) :Y(Mfl:'. - 2,VI",nu). (148)
Con el etnbrague retrasado completamente desacopla.do'
,nótn.ntá de fiotamiento t'!4s'n¡ : 0' el momento de giro
v alor
¡r _ o,5BMf,l'etYrg
- 'r
SU
el
cuandoalcanza
(laBa)
!l
r)
rl
rl
I,it
n
ri
tI
En este cáSo, If ¡¡p ; : ,}'lf,l'o, . o sea, todo el momento -que .se
,prñu ;i-pr;;1;'*,ji'iii del 'tiáctor
se transmite al semieje ade-
¿r,c"r,'" _ (_ trr,. r.) 0,511ufl,1,,, + M,. tu). (l48b)
¡v|c :0,óB --=--;, - : -7,
El valor del momento de giro se regula variando el apriete del
289

§ 5. Característica de giro del tractor de oruga
al del motor el ba-motriz del tractor,
Mt^p. n: (Ptgz * Ptgl) r, * Mr. rr : Ptg. et, * Mr. rr,siendo ll,f¡rp n:momento -de impulsión del tractor con la Dotencianominal del motor (par motor calculadá)lDe esta ecuación se desprende ü;e ;i-;;il;ü''i."'ir.nudo,l¿..;i".,
caso que se examiña puede ser creado en el semie¡e ie-
hIr. t- Mi,rp. n- Pts. grr.
momento de frenado obtenidal48b), pueden halla¡se los va-
, u:,".: Í f 'fit' ?,T,' ;1 :¿:?1,:il3:, los cuales en'la actuatidad sea grícol as,
Mgt :@ (rvf,*0. n * h|,.,,) : ff (2Mr,np.n - ptg. g r.). (l49)
. La ecuación (149) muest'a que en er valor der momento degiro influencian el número de la'marcha con lu q* i.-.rectria "ls condiciones de movimiento en la
enor es la fuerza tangencial deeste caso del tractor, -para
con-mayor puede ser el valo¡ del
Ito de giro, asegurado por laalizar a callsa dc una insufi_
de la cruga- adelantada, la quearrollado la fuerza tangencia['deener el momento indíéado. por
Para determinar su valor,cial de tracción Pqz puede desael giro del tractor,'según las
290
camino. Adoptando que el pcsotes iguales entre ambas orlsrsq tiene el mismo valor durairte
dei traclor G se distribuye en par-y que el coeiiciente de adherencia
posible escribir por analogía conel giro y la marcha rectilínea, esla fórmula (9a), que
((((((((((
(((((((((((((((,(
(r(
rl
tl
(l
((
Pqz:AYz* +:0,5Gp ++:momento en la rueda motriz de la oruga adelan-
tada, consumido para superat las resist-encias in-teriores que actúan en ella.
A.causa. de la pequ-eñez del valor de .,11,2, adoptamos para laLrridad de los cálcLrlosseguridad de los cálcLrlos
Pqz:0,5Gp.Por otro lado, de la ecuación (145),
P,*¿:0,5P1g. - + +en cuenta que durante el giro estable, el momento degiro es igual al rnomento de giro, o sea, ,4f,... : ¿1.,ecuación anterior del siguiente modo:
PEz:0,5Prs. -+ #,sustituyendo en esta. ecuac.ión Ptsz y. Mr por sus valores 0,S Gqy Ms,p correspondientes a la oru§a á¿etárita¿a que patina, obte'-nemos:
s iend o
Teniendoresistencia alescribimos la
de donde
0,5P1g. . f
fuIc,t:0,58 (qG - Pt*. *).
II"q -B
_ De esta manera, de aquÍ se deduce que el valor del momento{g.giro que puede ser desa¡rollado por -el
tractor según las con-diciones de adherencia con el caminó, no depende deT mecanismode giro.
El análisis.del giro de u-n tractor de oruga puede ser realizadoen forma gráfica óon ayuda del diagramu".n' l, figura-it+. nldiagrama se denonrina característica ile síro del traclor d.e ortLsa.diagrama se d.enonrina característica ile gíro det traclor cle ortLga.
En el eje de abs'cisas de la característica se trazan los radTos
(1 50)
rad ios
291
relativos de giro p:+, y en el eje de orrlenadas, el valor de losmomentos resultantes de la resistencia al giro M.o" v los momen-tos. de giro lUgx y Ms,t que son posibles-según ia'potencia delmotor v la adherencia con el camino,
Se examinan giros estables con raclio constante. El momentoresuitante de resistencia al giro se calcula porel momento de giro MsN por una de las fórmulal mecanismo de giro instalado en el tractor,por la fórmula (150). Con ello, se deben tenerdiciones del camino o del campo prefijadas, la carga en el gan-
-- _ ((

cho, el radio de giro y la dependencia entre el coeficiente reducidode la resistencia al giro, el coeficiente de ¡esistencia a la rodaduray la dirección de la resistencia de tracción y el radio de giro. Deacuerdo con los resultados obtenidos se trazan las curvás en lacaracterística, todas elias en una misma escalh.
La característica que nos ofrece la figura ll4, está elaboradapara un tractor con remolque según los datos del ejemplo numé-
motor.
¡
,l
,I
It
1l
I
r¡
rentos de giro: ,VI*x/ y fulrxll; Ia primera de ellas corresponde aliro del tractor con una de las marchas inferiores, la segunda conna de las superiores. La curva,44u¡1 pasa más arriba que la curva[.".; por consiguiente, la potencia del motor del tractor asegura
giro del conjunto dado con [a marcha inferior adoptada contalquier radio de giro p ) 2. No obstante, de acuerdo con lasrndiciones de adhe¡encia con el camino, el giro del conjunto conrdios menores a p = 5 es imposible, ya que en los sectores de
característica correspondientes a giros más pronunciados, larrva 1VI** pasa más abajo que la curva Mr"r. Para hallar por larracterística representa da con qué radio mínimo puede electuarse
giro estable del conjr-rnto indicado, es preciso proyectar elrnto a de intersección de las curvas M,r. y Mr* en el eje derscisas; el segmento que se corta en dicho eje determina el valorlscado prnrn.
t2
EJEAIPLO DE CALCULO
Se requiere elaborar la característica de giro de un tractor de oruga que
marcha poi un camino de tierra ho¡izontal con ún remolque de ruedas de dos ejes.
Datos iniciales:l. El tracto¡ está dotado de un mecanismo planetario de giro de un escalón.
6. Largura de la superficie de apoyo de las orugas Lo.:1,89 m.
7. Ancho de vía de las orugas B:1,3ó m.8. Coeficiente de adherencia de las orugas con el camino A:0,8.9. Coeficiente de ¡esistencia a la ¡odadura del tractor:
a) durante el movinliento rectilíneo f : 0'06,
b) durante el giro I* : t (r * E+T)10. Coeticiente reducido de resistencia al giro del tractor:
a) Mírximo [¡¡¡¿r¡ : 0,7;
b) Con radios relativos de giro p ) 2,
FmáxP : ¡Éil o;131p +¡;5t'
M.".: .4fo * Pgan sen t/gan : ¿f p + 2200 sen y, kgf 'm.
El momento de resistencia al giro ilfo que entra aquí, creado por las reac-ciones laterales rlel camino y que actúa en las orugas durante ei glro, se ax'presa con la f órmula ( 138) :
- üGLo, ft*á*Glo,trtp- 4 - 4[0,85+0,15(p*0,5)]'
rico abajo considerado. Esta co-mienza con el radio m[nimo degiro p : 2. No se recomiendanvirajes más abruptos trabajan-do con remolqlres, y'a que eneste caso aumenta bruscamenteel momento de resistencia algiro, y el ángLrlo cp de inclina-ción de la barra de acoplamien-to del remolque respecto alplano longitudinal de simetríadel tractor resulta ser muygrande y es peligroso para laintegridad del remolque.
La curva ,tf.r. a medida deque se desplaza en la caractc-rística hacia la de¡echa descien-de, ya que al aumentar el radiode giro, disminuyen el valor delcoeficiente pr de resistencia algiro y los ángulos y de inclina-ción de la barra de acoplamien-to del remolque hacia el ejelongitudinal del tractor,
En la característica estántraza das dos curvas cie los mo-
"§,§
ia
,, I_lil
u408t620+
RP=-l
ig. t 14. Caracterlstica de giro de unactor de oruga (de acuerdo cc¡n los
datos Cel ejem plo examinado).
293

Para determina¡.los valores de sen vempJea cuando el tractor lñil*¡o1;nvsegún esta fó'mula
sen r: { (/g"n * Iu)
R'+ /lDe esta manera, en nuestro caso
(114) que sede dos ejes;
ü'*:ffi.ruffiukgr.mLos momentos de giro lfs", desarrollados por.el-tractor al utilizarse porcompteto ra potencia de-r motoi,"ie-á;i;;;i;;;'por ra iórmula (r49);
Mctt : Y P*,^0. n - ptg.
ur,).
.r.Si,?t,r.,{lr!s.los valores de los nromentos de impulsión llr.p.o que entran
con la marcha inferior
Mr.,,p. n/ =- Ifni¡r.It¡,. : BG . 38 . 0,gg: I109 kgf . m;
con la marcha superior
Mtrr¡, nlI : Mnt¡,llr'1¡r:36,21 .0,88:665 kgt.m.
.r ,.kfufo[tl" tangencial de tracción Pts. s, necesaria para girar el tractor con
Ptg. c: tnG * Pr^ncos t:0,06 (l * ,,+ , ) 6000 + 1000 cos y, kcf .
lrr.ff:itXt::,'u?il?,1trri-ottsar los valores de los momen[os de siro ¿tBN porcon la marcha inferior
:vr*¡/ : o'sn (-?:1J!1 - p,*. *) :0,675 (6840 - p,..
*) ksr . m;
con la marcha s[perior
flsN¿/:0,5'B (i= - o,.. *):0,678 (Bsoo - pt*. n) kgr .m.
-",:"','-1'::i:i":."J.T::,:',51'lii:H,iIi,,,ü,,". ia adherencia de ras oru-
Mup:0'5 B (vG - Pr* *) :0,675 (0,8 .o0oo - pts.e) :;0,625 (4800 - ptg
g) kgf. m.
294
utillzando las fórmulas expuestas, fueron. obtenidos los sisuienles datosprecisos para trazar las caracteríiticas de giro del tractoii
Mo.
Según estos datos en la fig I 14
Mr.", M*¡¡lestán trazadas cuatro curvas:
M*¡¡ll Y tlu*.
Radtos cle glro pValores que sedetermlnan

Capítulo X
Estabilidad de tractoresy automóviles
I l. Estabilidad longitudinal
Denominemos el ángulo mayor de ascenso, con el que elractor o el automóvil pueden estar parados sin \rolcar, dngulostático límite de ascenso y lo designarernos por q,lim. El esquemae las fuerzas y momentos exteriores que actúan en este caso enI tractor de ruedas, está representado en la fig. 115,a. El tractor: vuelca cuando sus ruedas delanteras se descargan completa-rente y la reacción normal del camino que actúa sobre ellas¿ : 0. Toda la carga originada por el peso se percibe por lasredas traseras, por ello en estas actúa la reacción normal delamino Y r: G cos orim. Bajo 1a inf luencia de la componente dcleso G sen Glím el tractor tiende a rodar hacia abajo; para que;to no ocurra, a sus ruedas traseras está aplicada la [uerza deenado P1r. También obstacLrliza 1a rodadura del tractor haciarajo el momento de resistencla a la rodadura de las ruedas tra-:ras 14¡. rr QU€ actúa, como está indicado en el esquema, en:ntido horario; ya que su valor es pequeño Io despreciamos paraseguridad cle cálculos.De la condición de equilibrio del tractor respecto a su posible
e de vuelco O2 tenemos:
G cos o,1¡n,a - G sen a¡¡¡1h :0endo a y h: coordenadas longitudinal y vertlcal respectíva-ente del centro de gravedad del tractor, de donde
tg o,'* -- +. (r5t)
Es evidente que, si no se considera el momento de resistenciala rodadura de las ruedas traseras ltr{¡.., entonces, con el ánguloiático limite de ascenso, el vector de la fuerza de gravedad debersar por el eje O2.
Introduzcamos un concepto análogo acerca del ángulo estáticonite de descenso y designémoslo por of,,,, (fig. 115, b), Estando
6
el tractor estacionado en una rarnpa descendente l[rnite se descar-gan completamente las ruedas tráseras y la reacción Y, : 0. Laieacción
'normal del camino en las ruedas delanteras Y a-SC
lac8stde
Fig. ll5, Esquema de las f uerzas qr.e1;ti.rl en un tractor de ruedas durante la
c-en una rampa ascendente lfmlte; á-en una rampa descendente lf¡¡ltc'
equilibrio del tractor respecto al eje de vuelco 0¡, posible en este
cáso, tiene el siguiente asPecto:
C cos oli. V - a) - G sen aiv^h : O
de donde. t L-atg qtr. : ---i- (l 52)
rl
rll
tl
tt,l
0
uf
Con el valor indicado del ángulo estático límite de descenso
particular en dependencia de la carga que lleva.' Para lo- traótores de ruedas detipo universal orí* : 35 -+ 40o,
oli-:60o y más. Aproximadamente en estos límites se hallan
tós'angulos examinados para los camiones, cuando éstos trabajan
297

¡t
i,lT,Jl,r.Í,i,*.?,#"Xi',1:, ficada y eila está dispuesraü ;;ñ;ián'g.ii..,r ,,,";.:x?;[ xT,:r"rd:,,u,ioi,,n ) 60". Para los turismo y camiones sin
gravedad se halla aproxima-, por consiguiente para ellosítes de ascenso y déscenso escasos ellos no son menores
La estabilidad longituclinalascendentes y descendcnt;";;" €n rampass.ultado del ri,elco ,l.l;;h¿.,i;: o como re'deslizamiento, .rán¿á i.'"i;;';; ausa de sLt
.odtá-'rllimos de ascenso y descenso conestai parado sin deslizarse, res-ractor sólo está dotado de fienosurre generalmente, entonces Ioss se limitan por las siguientes
Entonces las condiciones para el deslizamiento en eldescenso son iguales
tgoe:tgoi:p.
Y
x7 T* 100%
ascenso y
(l 54)
(155)
299
Gsen o,p: P[.,,,r,, : T]r, - n Gcoso, (l - a) * csen a*lr .
G sen oi : Pr.n.,o* : ef, : e
De estas ecuaciones obtenemos:
tgo*:rp++i tgc,á:e ffi
traseras se descargan pot com_con frenos en las iLredis trase.
or P"rná* : qG cos o*'
298
(153)
Denominemos el ángulo límite de ascenso, con el que la reservade. estabilidad longitudinal se reduce hasta el valor'mínimo per-mitido f,per,rin, dngulo crítico de ascenso del tractor segtin la it¡r¡-gibilidad y lo designaremos crc. dr¡. Al reducirse en lo sucesivo lareserva de estabilidad longitudinal se perturba la dirieibilidadnormal del tractor. Para Ios tractores de ruedas, en
-los que
tg o,,* < 0,8 es posible tomar Xp"r*¡n :0,4 -:- 0,G; cuanfo menores el ángulo oli,, del tractor y peor la adherencia con el caminode sus ruedas delanteras dirigidas, tanto mayor debe ser el valormínimo requerido de la reserva de estabilidád longitudinar. Estadebe ser también elevada en aquellos casos, cuandó en el tractordurante [a marcha actúan momentos de desviación que tienden aviolar su estabilidad de rumbo, o sea, desviarlo de la dirección denlarcha prefijada; el aumento de la reserva de estabilidad longitLr-dinal es.impr.escindible en estos casos para contrarrestar mejór ladesviación lateral.
Cuando los ángulos o.rn son pequeños (tg o,,,n < 0,8), el valordel ángulo as. ¿¡. .puede ser determinado de la condición, qu. pu.uconservar una dirigibilidad satisfactoria del tractor la ieacciónnormal del cámino en sus ruedas delanteras no debe ser menorque Y¿: (0,15 + 0,2)G,
(((((((
(((
(
(
(
Itttt'trt
ra

t
I
rl
,l
rl
rl
rl
rl
,l
,11
,t
1t
ll,
It
$
1\l
ü
0
{t
rll
dt
l0
nomento de frotamiento del embrague. Para la primera marcha
&I,*0r,.: PMni1.¡I¡.'
;iendo B : coeficiente de resetva del embrague.La ócuación de equilibrio del bastidor con respecto al eje de
¡uelco O, tiene, al sépararse las ruedas delanteras del suelo, laiiguiente forma:
M,ro,,-: Gbr./b"r,
iendo G¡r, - peso del bastidor, igual al pesoel peso de las ruedas motrices;
lb^": brázo del vector Olras respecto almotrices.
puesto que el centro de gravedad de las ruedas motrices está
lispuesto en su eje geométiico, el momento del peso de estasu.iur respecto al'ejJindicado es igual a cero, por consiguiente
Gor./or. : Gl '
iendo G- peso de todo el tractor, y l- brazo del vector G res-
ieito al eje de las ruedas motrices. Pero ya que
Gl: Ga cos 0 - G (h - r.) sen o,
a condición que haga imposible el giro dei bastidor alrededor delje de las ruidas énclavadas puede ser expresada de la formaiguiente:
G [a cos " - (h - r.) sen o] ) B,&fnl,.,tl ¡,.
Generalmente esta condición no se cumple. El interés prácticoe la ecuación expuesta radica en que el[a permite e\raluar los
00
lactores que influyen en la posibilidad de vuelco del bastidor deltractor alrededor del eje de las ruedas motrices. Cuanto mavor ,esla potencia específica del tractor, que se caracteriza por la'razó¡
{!- , menor su primera marcha (mayor t¡r), menor la coordenada
long de gravedad a Y m3verii iciente de reserva delmás bilidad del vuelco. Lacons longitudinal del bas
Fig. ll6. Esquema del vuelco de un tractor al acuñarse las ruedas motrlces.
el enclavamiento de las ruedas motrices ocurre durante la marcha
del tractor menos
eje de las ruedas

Al haber resistencia de tracción en el g ion
¿el-ounto convencional cle enganche como a.jláLr" i, áét .ié ¿. las ruedas riotrices, ésta del
ü;;iJ";, de esta manera' disminuve la de
vuelco analizado''- útti.r*ente, se observa cierta disminución de la estabilidadde:los coni actores de ruedas, como conse-
empleo en § de.máquinas suspendidal p9-
estás detrás" r, el amplio empleo de chasis
, en los que idad longitudinal, sin las má-emente inferior que Ia de los
ización de semir¡emolques queactor, la elevación de las Poten-t
:1:#:t',"r"'ár,roi,' ou u lon gitu -
dinalvmeiorarladirigibilidarldelosconjttntos.tractoresdc;;¿á;.: únó'¿. ellos es la"lijación de contrapesos en.las.ruedas de-
i;;t";;.. puede ser eIicaz el aumento de la batalla del tractor,u'iii-áo"¿""xiste la posibilidad de regular su longitud..Este medio
"r'ruiti.rtarmente eficaz en los caios cuando simultáneamente
"án'.i áumento de la batalla tiene lugar el descenso del centro de
áiá*¿rá, como por ejemplo, en lo_s tractores de ruedas de la clase
Ee 0,6 t de la fábiica áe tiactores de Járkov'-- J;ri; con ello se realizan trabajos para crear diversos dispo-
sitivás de seguridad que impidan- ei vuelco del tractor, o que pre-
;;;g;r-al tüctorista'$e. este. peligro o que lo proteja contra le-
sionls a consecuencia del vuelco.'^"'bá.o .riterio de la estabilidad de los tractores de oruga puede
servir 1a posición del centro d
sistema dé susPensión del basticon el cual el tractor frenado si
de fuerzas exPuestos en las figsáion"r de equilibrio respecto a los centros de presión:
G cos o,,n (0,5 ¿o, -¡ a.l) - G sen o,,.h : 0;
G cos of,,, (0,5 ¿o, - ar) - G sen oi,./u : 0'
de donde
tg ori. : o:5 Lo;* oo ; tg o,,. : o'5
'oi- oo (l 56)
En estas f órmulas ao es la distancia longitudinal desde el
."nt. de grav"dud hasta el centro de las _supeificies de, apoyo de
iui-áiráur] Cuando el centro de gravedad está Cispuesto delante
302
del centro d de ofpositivo, si en betomarcon ld os
despreciado mo is-tencia frontal X¿.
Si los ángu ascenso y descenso son mayore.sque los valorós r las fórniulas (156), e.so no s1S¡i'fica aún un vLl cia del tractor: girando alrededorde los bordes e uperficies de apoyo de las orugas,
Fig. ll7. EsqLrema de las fuerzas-que actúan en un tractor de oruga durante laparada:
a-en una rampa ascendente lirnlte; á-en una rampa descendente lfrnlle.
el tractor se asentará ett las ramas inclinadas de las orugas, tra-seras o delanteras.
apoyos, en los limites de 30-35.- Gracias a las elevadas cualidades de adherencia de los trac-
tores de oruga, su estabilidad Iongitr-rdinal contra el desliza'miento en la"mayoría de los casos ño es menor que contra los
(((((((
(
((((
((
(((
(((
(
(
(
(
((
(
(
(
(
(
(
(
(303

'uelcos. El frenado de los tractores de oruga se efectúa medianteos frenos que se utilizan para los giros: el momento total derenado, que puede ser creado por los dos frenos de giro, general'rente es suficiente para mantener el tracror en las rampas ascen-entes y descendentes límites.
2. Estabilidad transversal
Denominemos ángulo estático límite de inclinación transversal,I ángulo máximo con el que el tractor o el automóvil puedenstar -parados, sln ¡,,olcarse lateralmente y sin deslizar hacia
Al deducir la fórmula (157) fue adoptado, que el centro degravedad del tractor se halla en el plano longitudinal de simetriade sus ruedas.
Una influencia adicional en la estabilidad transversal de lostractores de por el empleo en ellos de un ejedelantero os la posibilidad de girar en el planovertical-tran ngulo limitado respecto al bastidordel tractor. e ello, al producirse la inclinaciónlateral del tractor, su bastidor inicialmente gira alrededor de laarticulación del eje delantero y sólo después de apoyarse en loslimitadores de oscilación, continúa el vuelco por el esquema des'crito en el cálculo inicial. AI girar el bastidor, su centro de gra'vedad se desplaza un tanto hacir un lado, en dirección al vuelco,lo que reducsla estabilidad transversal del tractor. Si se tiene ade-más en cuenta la diferencia de la flexión de los neumáticos y las
por los lados opuestos del tractor, amboso reducen, según los datos existentes, los án'tes de estabilidad transversal de tractores deomparación con los valores calculados por la
fórmula (157).En los tractores cultivadores triciclos o con
gemelas (fig. ll9) el vuelco lateral es posiblede los ejes laterales .4 - á. Su ángulo estáticoción transversal se determina de la ecuación:
tg0r,- § (158)
siendo d : brazo de estabilidad, o sea, brazo del eje de vuelcoA - A respecto a la huella del centro de gravedad del t¡actor.
Para los tractores de oruga, siendo suficiente Ia dureza delsuelo, el vuelco transcurre alrededor del eje creado por los bor-des exteriores laterales cle los eslabones de la orLrga. En este caso
tgF,,*:Wf!,siendo b - anchura de las orugas.
Los tractores de ruedas tienen, como regla, ancho de vía re'ambiar el ancho de vía varían osicos límites de inclinación trans deal establecer el ancho de vía pa ca
es de cuatro ruedas se halla en50"; aproximadamente en estos mismos límites se hallan los co'rrespondientes ángulos para los tractores de oruga; para los trac'tores triciclos F,,n,:30-35". Para los automóviles de turismola coordenada vertical del centro de gravedad h < 0,5 B y enellos correspondientemente Fr,*)45o. Para los camiones con lacarga completa uniformemente distribuida en la plataforma,
l! 3ar, 54e 305
dh'
it
Iit
III4
lf;it
ü
FII
I,1,
1,tU
fi?
ruedas delanterasalrededor de unolímite de inclina.
f
Lt
ln'
lo
I,'n rajo. El ángulo de inclinacién transversal, con el que el vehicu-comenzará a volcar lo designaremos por 0¡1,., y el ángulo en
que éste comienza a deslizar hacia abajo B,¡,.En la fig. 118 está mostrado el esquema de fuerzas y reac-
lnes externas que actúan en Lin tractor de ruedas estacionadouna pendíente transversaI limite. El valor del ángulo F,,,.
ede ser determinado partiendo de que el vuelco comenzaráando la reacción normal del sLrelo Y" en las tuedas, dispuestasla parte superior de 1a pendiente, se reduce a cero. Escribiendoecuación de los momentos respecto al eje probable de vuelco O',tenemos:
C sen p,,*& - 0,5 BG cos p,,. : 0,donde
1. llB. Esquema de las fuerzas quelúan en un tractor de ruedas duran-la parada en una pendiente trans-
versal límite.
tg F,,n, = lY ,
n«lo B : ancho de vía del tractor.
I
Fig. lt9. Esquema para determinar elángulo p,,,n en los tractores de trcs
ruedas.
HI*l
I;
iII
I
lrü
l'n
l.i¡
h.
f"
F
(15e)
I
1r
(157)

,-5[
erzas, que _actúan en el planola supelficie del camiriá, obte-
ja; l- nro I ^-^
It
I)
/
siendo Z' y 2,, -
Qz:
De la ecuación
G sen B, : Z' + /, - qr(y, + y"): g,Gcos pa,
y descíende , ,n'u-rlár*á,: ,jJl;irÍ,de, esto. comienza ra segunda etaoadel vuelco, que se. ..átl7u' ,-l?";;:t;l:r _1uev9 eje B, bajo ta ;¿ió, ";ára energía cjnétic^a.- u.r*rir'ü. uñIa primera etapa. Si, la eneig; q;;er tractor -.puede ut..zar en ui]ucasoJ es sufíciente par .t.uri'.1 .ültro de.gravedad a Ln ¡oiir; ;;;_plazarlo del punto a, al-al', á;'.dr;;üen el plano vertica
:1,":i: ;;' ui;;'';Z',1 H;,il':,r?;:l::.luo girando, el t¡acto?ie
"r.1.,oaJo,.l?.acción de su io p.io.-'ia':.:l|l:ió,r, para Ia iridad rtpr
:r,::l:^:r,{'d5r';"r'n't"oor:1 i:Xllr# lY
vat<1 ta ilidad delvuelco del tractor srórmura: -e expresa con ra ,!r"-ri3[1....i,x?ffii.j.ri1.,.0,i.
' .e yr, reacciones nor.
organos motrices, dis-en la parte inlerior y
ia..de los órganos mo-dirección lateral.
I
I
tg Fe : Q..
(((((
(
(
(
(
I
t(
tttttoo
0I
I
(160)
306
(l6l) dinámíco tateml"?tl ttuttátl'
F¿¡n : (0,4
307
ll*

,ndo de la zanla o el rebote de la rueda al subir a un sobresa-:nte, aumentan la inclinación del tractor y, como consecuencia,rducen su estabilidad lateral dinámica.
Para elevar la estabilidad lateral de los tractores de ruedas,r las instrucciones de fábrica está prevista la instalacíón de las,.edas al mauor arucho de oía posible al realízar trabajos de trans-trte g al marchar por decliaes. En estas condiciones se requiereI cuidado especial durante la conducción dei tractor.
3. Estabilidad transversal con marcha curvilínea
Es muy considerable 1a influencia de las fuerzas de inercia enestabilidad transversal de tractores y automóviles durante su
ovimiento curvilíneo.Analicemos el caso más simple de giro de un vehículo de
edas en un terreno horizontal con una velocidad estable y un
Fíg. 12t. Esquema de giro de un i¡actor de ruedas.
lio constante de viraje alrededor del centro de giro. En laura l2l se ha adoptado, que el centro de giro O está dispuestoel punto de intersección de los ejes geométricos de todas las
:das del vehículo. Durante el giro se origina \a fuerza centrí-¡a resultante P., aplicada al centro de gravedad del vehículolirigida por el radio desde el centro de giro. Su r,'alor
P:G ,o2Rc g g'c.9,
ndo «r* : r¡elocictad angular de giro del vehículo alrededor delcentro de giro, I /s;
R". e: radio de giro del centro de gravedad del vehículo.Descompongamos la fuerza P" en dos componentes: la pri-
,r'& QLre actúa en el plano longitLrdinal del vehículo, la segundacl plano transversal. La primera de ellas provoca la redistri-
l
Ias ruedas delanteras y tra-I vuelco lateral del vehículo.ersal de la tuerza centrífuga
Pi : P"cos y" : + olR". *cos y..12'+' (163)
siendo 1l": ángulo de inclinación de la resultante de la fuerzacentrífuga en el plano transversal;
u : velocidad de avance media del vehículo durante elgiro, m/s;
R: radio dc giro, m.Al marcha y disminuir el ¡aclio degir_o, bruscamente y, puede superar atodas ntes que actúan' en el vehícuto.
Ya a elativámente moderada del auto-móvil u:_ 15 m/s (V :54 km/h) y un radio de giro no muyabrupto (R :40 m), la componente-lateral P'" d,e la" fuerza cen-trífuga excede, como se deduce de la fórmula (168), 0,5 G.
Al entrar el oehículo en una cltri)a, además'de ia fuerza cen-tríluga, surgen también otras fuerzas de inercia, ya que el pasodel movimiento rectilíneo al curvilíneo estable coh un radió decurvatura constante se acompaña de un cambio continuo de la
puente t¡asero Oz con una aceleración tangencial a$, siendo ala coordenada longítudinal del centro de gravedad (radio rerativo
0(r),de rotación), y -f elcambio de la velocidad angular de giro r,r*.
como resultado de ello se origina la fuerza tangencial de inerciaG da-
c o -i, aplicada al centro de gravedad del vehículo y que
actúa en la misma dirección que la f.uerza centrífuga pi, (en tafig. l2l ésta se muestra con línea de trazos). El valor de la fuerzatangencial de inercia indicada depende, siendo Iguales las condi-
ciones restantes, del valor de la acele ración S , o sea, de lal-rrusquedad de giro. Un giro brusco, particularmente a alta velo-cidad, puede acarrear un aumento considerable de la fuerza total
G da-transversal Pá * ; a of , que tiende a perturbar la estabilidad
sdel vehículo. Al salir de la curva ei radio de rotación aumenta
paulatinamente y, como consecuencia la aceleración * t¡"n,
GG:_(rD¿K:_gce
309

dirección opuesta y la fuerza tangencial de inercia
ta de .la fterza PL.Cuando el automóvil marcha por carreteras, gran influencia
en su estabilidad transversal ejerce el perfil transversal de lacalzada en la-s curvas. Si la inclinación transversal de la carretera
al centro del uiraje, entonces,automóvil y la correspondiente
Í,1 "X:' "' ;
I g;, $i' : i'"', ;,:
"* i ::
teral del automóvll. Si la inclinación transversal de la carreteraestá dirigida hacia el centro dela curaa, las dos fuerzas indica-d.as actuardn en sentidos opues-/os. Es evidente, que en el se-gundo caso la estabilidad delautomóvil en la curva serámayor que en el primero.
En Ia fig. 122 está repre-sentado ei esquema de fuerzasque actúan en el automóvil cnel plano transversal duranteel movimiento estable en lascurvas, que tienen una inclina-ción dirigida hacia el eje degiro Y - Y. En el caso dado esposible el vuelco alrededor deleje O". Puesto que en el mo-mento inicial del vuelco las rue-
la carretera y la reacción Y' seráequilibrio del automóviI respectose expresa con el momento si-
(Picos p - c sen B)á - (PisenB
Sustituyendo -aquí la componente
f G cos 0)0,5 B: O.
de la fuerza centríiuga por
Fig. 122. Esquema de las fuerzas queactúan en un automóviI por el plano
transversal durante el giro.
das izquierdas se separarán deigual a cero, la condición deal probable eje de vuelco O"guiente:
se res-
condición para conservar Ia
G da.- a --=3gdt
su valor
marchaderamos
Ga2a l-, expresamos Ia
estable del automóvil en las curvas del perfil que consi-con la ecuación:
* # (hcosB -0,5Bsenp) ( c(0,5Bcosp f ft sen p).
Para observar la condición indicada la velociclad máxima clemarcha u6á¡, rl/S, en las curvas no debe exceder del valor
310
( I 64a)
Desde el punto de vista de la estabilidadgros.o e.s el giro de los tractores que trabajen dcclives ab.ruptos, en dirección á la parte'En estas condiciones Ia componente pi dees paralela a la superficie det decrive, está dirigida por el declivenacra aDaJo y se suma a la componente latera[ del 'peso
G sen B.Cuanto menor es el ángulo F,,*, que caracteiiii Á-É.t^Uifi¿uatransversal del tractor, cuanto mayor es la velocidad de marchay.menor eI radio de giro, los que déterminan el vatái ¿e-la'fuerzaPi, tanto más peligroso es ei giro en ras con¿icionei iridicadasy menor el valor del ángulo crítico del declive transversal en elqlre es posible el vuelco dél tractor.
((((((((
r(
((
(((
(/(
r(
(
t
(
{
{
tr(
(
I(
(
r(
. D. forma. análoga se puedetransversal de la carreterá estácentro de la curva, entonces
comprobar que, si la inclinaciórtdirigída en sentido contrario al
6((((_
(l 64b)
3l l

§ 4. Derrapaje de las ruedas delanteras y traseras
si la adherencia de los neumáticos con el camino en dirección
Fig. 123. Esquema de Ia acción simultánea de dos reacciones en la rueda: latangencial y la lateral.
especialmente en caminos húmedos y resbaladizos y en otroscrios, cuando empeora la adherencia de las ruedas con el ca-
mino.La I lrenado Y aceleración se
explica t.iemPo. sobre las ruedasu.iúrn ales del camino, Y estasejercen - stabilidad de las ruedasc"ontra Para esclarecer la circunstanciamencionada analizemos la acción simultánea en la rueda de dos
reacciones (fig. 123);tangencial, en el esquema-representado esta
reacción es el-esfuerzo de frenado P1, y lateral Z. Esias dos reac-ciones dan la resultante:
Aquí vemos que cuanto mayor es el esfuerzo tangencia) queactúa'en la rueda, tanto menor es su adherencia con el caminoen sentido lateral. En caso extremo, cuando el esfuerzo de trac'ción o de frenado alcanza el valor máximo posible según la adhe-rencia con el camino qC., la'fuerza lateral Zmáx:0, es decir, eneste caso la rueda comenzará a resbalar en dirección transversalal surgir una fuerza lateral mínima, desde un punto de vistateórico infinitamente pequena.
Es más probable el derrapaje del eie p sterior del automóail,cuyas rqedas al trabajar en régimen de empuje o frenado deben
adherencia con el camino el valorresultante se limita por ei I'alor:
desarrollar frecuentementegrandes esfuerzos tangencia-les; además, durante el fre-nado la fuerza de adheren'cia de las ruedas traseras 4
con el camino se reduce a
causa de Ia redistribución delas cargas originadas por elpeso entre los ejes.
Sin entrar en detalles,analicemos el proceso de de-rrapa je en f orma simplif i-cada. Aclaremos que ocurrirácon un automóvil en movi-miento rectilíneo, en caso delderrapaje del eje delantero1iig. izlt, a) y dól eje trasero ó
Fig. 124. Esquema del derrapaje durantela marcha rectilinea:
a-del eje delantero; á-del eje trasero.
hasta el derrapaje, marcha¡áa la velocidad l/r, que es laresultante de la velócidad I/ y [a velocidad V, de deslizamientolateral de las ruedas. Como resultado de ello el automóvil co-
lamiento de las ruedas delanteras. Con esta dirección Ia f uerzacerutrifuga tiende a amortiguar el derrape y contribul'e de estamanera a la restitución del movimiento rectilíneo prefijado.
Es mucho más peligroso el derrapaje del eje trasero. En estecaso el automóvil cbmeizará a girar aliededor del centro O", dis-puesto en la intersección de las normales a los vectores de las
313
(fig. 124, b).En el primer caso el eje
delantero del automóviI cam-biará sLt dirección de movi'miento y en iugar de la velo-cidad 7, con la que marchaba
I
I
I
R_Por las condiciones de
máximo R^¿* de la reacción
R*¿x: QG.,
siendo e : coeficiente de adherencia de la rueda con el camino;Gr: Carga normal sobre la rueda.
Para R:Ri.¿* la reacción lateral Z también tendrá su valorrrráximo 2,,,¡*. Teniendo esto en cuenta, de la ecuación anteriorobtenemos que
,,^u.f ¡qo,f -f,,3l2
V

velocidades V2 del eje trasero y 7 del delantero. Entonces, elcentro. de_giro se dispone de tal manera que la fuerza centrífugalateral P'. que se origina, no sólo no ámortigua el derrapal'e,
§ 5. Determinación experimentalde las coordenadas del centro de gravedad
La posición del centro de gravedad influye sustancialmenteen las cualidades dinámicas de los tractores y automóviles. Elmétodo analítico para determinarlo es voluminoso y puededar únicamente resultadosaproximados. Por ello estese emplea principalmentepara cálculos preliminaresen el proceso de proyecciónde los vehículos. El modomás simple y exacto dehallar el centro de grave-dad es el experimental.
Para hallar la coorPaia haliar la coorde- =Z- l^--:L--l:--l l^I ^^- vnada longitudinal del cen-
tro de gravedad el vehícu-Io sq sltúa por turno conlas ruedas delanteras ytraseras sobre la platafor-ma de tna balanza, mien-tras que las ruedas delotro eje, sobre una super-ficie dura, dispuesta almismo nivel que la plata-forma (fig 126, a). Segúnlas indicaciones de la ba-
teras y el peso G., que re-cae en 1as ruedas traserasy por la suma de estos sedetermina el peso total delvehículo G : G¡{ Gr. Lacoordenada longitudinal delcontinuación, por ia fórmula:
lanza se determina sucesi-vu*.nt" ál p..o G:¡, que 7/recae en Ias ruedas delan-
@-S¡,ts"(C
(((
(((
Fig. 125. Esquema de derrapaje del eje trasero durante el giro.
Tgtof y girar las ruedas delanteras en el sentido del derrapajedel eje trasero.
314
Fig. 126. Esquema para determinar las coor-clenadas del centro de gravedad con una ba-
lanzal'a -longitudinal; á-vertlcal
centro de gravedad a se calcula, a
,oda: L-ic, (165)
siendo I : batalla del vehículo.Para determinar la coordenada vertical del centro de grave-
dad, uno de los ejes, generalmente el delantero, se eleva(fig. 126, á) y se apoya con las ruedas sobre un soporte de ciertaaltura H. La dimensión H no juega un papel importante; éste setoma en los límites de 0,5-1,0 m. Las ruedas traseras se sitúansobre la plataforma de Ia balanza, que indica el valor de la cargavertical Gi, que transmiten las ruedas traseras con una inclinación
315

determinada del vehículo. Es evidente, que Gi ) G,, Correspon.dientemente, en el apoyo delantero recae la carga verlical Gi:-G.-6i.Componiendo la ecuación de los momentos respecto alpunto 02, QUe es la proyección del centro de las ruedas iraserasen su superf icie de apoyo, obtenemos:
de donde
;iendo a': distancia longitudinal desde el vector delcentro de las ruedas traseras.
l': distancia longitu¿inaf ent-üios centros dedelanteras y traseras.
La longitud I' puede ser medida o calculada, utilizando la;iguiente dependencia, que se desprende de las correlaciones geo-nétricas
le donde
(L')' :(L2 ! Lr2) - (H - L,r)2,
L, :lla+ 2H L;Hr,iendo Ar: diferencia entre los radios de las ruedas traseras y
delanteras.Una vez determinada la distanciá a', basándose en las corre-
aciones geométricas, es posible hallar la coordenada vertical pora fórmula:
h: rz+ (r - *-) .ts o, (1 66)
lendo r2: radio de las ruedas traseras;o: ángulo de inclinación del vehícr-rlo.
Con cierta aproximación se puede considerar que
Eo:#.Al determinar la coordenada vertical del centro de gravedad,
s ballestas de la suspensión deben estar fijadas en li posiciónre ocupaban antes de inclinar el vehículo, para evitai la in-uencia de su flexión en los resultados obtenidos.
La coordenada transversal del centro de gravedad se deter-ina situando el vehículo por uno de sus lados derecho o iz-rierdo; en la platalorma de la balanza, como se muestra en la¡Lrra 126, c; teniendo las indicaciones de la balanza G", compo-:rros la ecuación de los momentos respecto al punto O de apli-
0
Gir'-o,'-0,
s':t-'+:r'o;oi,peso G al
las ruedas
rl
.'lt
-rl
tJ
t'l
rl
trl
lltl
úrrl
rn
"tln
',tl
rilr'f|
,l)t,,
o
cación de la reacción normal, que actúaopuesto. Conlo resultado obtenemos:
Q',fi - G (0,5 B +
en las ruedas del lado
e),
siendo e:coordenada transversal del centro de gravedad;B: ancho de vía.
De aquí
._(G'-0,6G)Ba
Si por esta f órmula la coordenada e
significa que el centro de gravedad estáplano longitudinal de simetría de los ó¡-ganos motrices en dirección a la plata-forma de la balanza, como fue adoptadoen el esquema; si ella resulta ser negativa,el centro de gravedad está desplazadohacia el lado opuesto.
La determinación de las coordenadasdel centro de gravedad también puede rea-lizarse con ayuda de un dinamómetrocolgado en el dispositivo de elevación, enel que se suspende el vehículo que seensaya. Analicemos la utilización de estemétodo para determinar la posición delcentro de gravedad de un tractor deoruga.
Para determinar la coordenada longi-tudinal del centro de gravedad, el tractorse sitíra como se muestra en la fig. 127,a. DeeqLrilibrio del tractor respecto al apoyo á tenemos:
P¿L¿: Q¡o'
siendo P¿: indicación del dinamómetro;L¿ y la: respectivamente los brazos de Ia fuerza P¿ Y
fuerza creada por el peso G respecto al apoyoLa coordenada longitudinal o del centro de gravedad
termina por la fórmula:P,a: la* .vo : Lof + ro,
siendo .ro: distancia longitudinal del punto de apoyo ,4
de las ruedas motrices de las orugas.Para determinar la coordenada vertical del centro de gravedad
el tractor se suspende en el dinamómetro en posición inclinada(fig. 127, b). De la ecuación de eqLrilibrio respecto al apoyo Á te'nemos:
P!cos aL¿* 0sena h:P¿senaáof Gcoso/o,
(l 67)
resulta positiva, estodesplazado respecto al
Z
Fig. 126:
c - tr ansver s al.
la condición del
de laA,
se de-
(168)
al eje
3t7

de donde
/z:ctg ,(,o- r^+)¡ no#, (r6e)
centro de gravedad con
siendo Pá : indicación del dinamómetro con la posición inclinadadel tractor;
ha: alttra del punto de suspensión del tractor en el di_namómetro respecto a lá superficie cle ,poyó de lasorugas;
q,: ángulo de inclinación del tractor, determinado poruna medición.
G cos o a - G sen o á - Or",. (f cos o * sen o) h*un - M ¡Ya-
Fig. 127, Esquema para determinar las coordenadas delun dinamómetro:
c -longitudinal; ó -vertical.
siendo a la coordenada Ibatalla; M¡ - el momentpara la seguridad de cálc
La rclación de la re
tática del tractor, teniendo en cuenta que I,., "estclon:
de graved,ad del t¡actor y I surodadura del tractor; adoitamos
s, fd".t durante la posición es-
^a:, T, se e.\presa con la ecua-
. o."- hYd seno+-Z:g f¡coso* seno):#11f f coso
rdu.t f'. Introduciendo en esta ecuación el valor d. Gr="* . hron
- 5100'510
- ,
y el valor de tg a¡,. : tg 4Eo : l, obtenemos G á 3000' 850 - '
.r¿T, - coso_2(seno{fcoso) = 0.gg_2senu,
o est
considerando. oue con una exactitud suficiente para fines prácticos puedeadnritirse que cos a': l.
2 sen o". dir _ 0,gg _ 0,5 :6,36,de donde
c.. o¡, = llo,
Ptg: (f coS oc. drr $ sen o". arr) (C * Gr..) :: (0,06 + 0,19) (3000 + 5000) :2000 kgf,
lo que para un tractor de la.clase-de.t,4 t en tas condiciones dadas correspondeaproximadamente a sus posibilidades límites dc iracción._ Ejemplo 2. Por un camino de tierra marchan doi camiones: uno de ellos
vacío y el otro con carga en [a plataforma
Teniendo en cuenta Que /6 : Ld*, h fórmula anteriorpuede ser representada de otra forma:
h : cte *(r, A:! ^) * ,, ( I 6ea)
EJE,ryIPLOS DE CALCULO
Ejemplo -1. un tractor de ruedas de la clase de r,4 t con remolque marchaa una velocidad uniforme.por un camino de tia;;s;o, ;rbi;";;"ii¿;as ram-pas que hay en su recorridó., .se requiere-dcterminar er valor der ánguro crítico de ascenso der conjunto!¡a.ctor, partiendo de la condicion de qué Srtru.ioi-ior;.;;;-;;; -a'irigiuitiaoafiable.
318
P;-a-'
(((((
((((((((((,(
(il
(
t(
(r(
((Ale

se requiere determinar, que velocidades máximas de marcha oor curvas dedio {
= 50 m pueden ser permitidas para ambos automóviles sih provocar su
relco lateral.Datos iniciales: ancho de vía del camión B : 1,6 m; coordenada verticalil centro..de gravedad del .camión vacío _á:_q,81 m, cárgado ¡it: t,áS m;
camino tiene una inclinación transversal F : 3", dirigida pira et lado opuestó,l centro del viraje.
Previamente determinamos los ángulos estáticos límites de la estabitidadtnsversal de los camiones por la fórmula (157):
Del vacío
tsori,- E*:¡H:o,nu,
teFíi.: +P:#:0,u,Las velocidades máximas permitidas de marcha en la cu¡va se calculan por
f órmula ( 164 á) :
para el cambión vacío
ymáx: ''' 1Á
§ l. Datos principales sobre las oscilacionesde automóviles y tractores
marcha ejerce una influencia negativa en las cualidades de trac-ció.n y los índices agrotécnicos, e-specialmente al trabajar con má-quinas agrícolas suspendidas. Una suavidad de maicha insufi.ciente se manifiesta por-_el surgimiento de vibraciones desagra-dables y nocivas. Por ello al eétudiarse la suavidad de maichadel vehículo se analizan las oscilaciones de sus masas princi-p a 1es.
La suavidad de marcha depende del carácter y el'n,alor de Iasfue.rzas perturbadoras. gue- proüocan las oscilaciones, cle la compo-sición general del vehículo y dc sus particularidades estructuia-les, especialmente de los elementos elásticos del sistema de sus-
Capítulo XI
Suavidad de marcha
del cargado
para el camión cargado
7i¿*:3,6
De esta manera, con carga en lalas curvas, es aproximadamente
i1
ts Fri. - tg F - 76kmlh;I { tg p,,.tg p
te 0íi. - ts 0= 59 km/h.
I { tg pi,rntg p
plataforma la velocidad seguraun 25% menor que la de-[a
CR
de marchamarcha sin
32t

surgen durante Ia explotación. A medida que emDeorade la superficie de la-carretera la cantidad'de baóhesla longitud-de las irregularidades disminuye.
El. perfil de los caminos de tierra y grava es menos establey e:t1 expuesto a- frecuentes-cambios, eépe-cialmente en piimaveray otoño, cuando la elevada humedad y ia disminución'brLrsca clelas cualidades mecánicas del suelo oróvoean orandpq dofnrmanin-
el estadoaumenta y
(.
(t((t((((((
tt((ttttte
t((rI
r(
rl
(r{
tr(
,t
Fig. 128. Esquema del sistema oscilatorio de un automóvil.
de unos u ot¡os cultivos. En las irreguraridades características delcampo se pueden incluir:
. a) cr-estas abatid.as y sqrgo! que quedan después del aradopr.incipal; su altura (profundidad) 75-i50 n m; la'distancia entreellos 300-350 mm;
. b) crestas de las. hileras que se crean al plantar cultivos
entrecavados; éstas tienen una -altura
de s0-100 **, l, -distan-
cia entre ellas se determina por las medidas adoptádas entre-su rcos;
^^ c) crestas de las hileras de cereaies con una altura de s0-80 mm .v una distancía entre ellas 120-150 mm.
Analicemos el sistema oscilatorio del automóvil. Este constade las masas e.xpuestas a oscilaciones, de los elemántor-ál ¿.ti.o.
p.rovocan grandes deiormacio-n e s d e t a c at z a d a ., li l'rl'u r" ;: : :i',". fti:J "oT ?.fl LT:::
que perciben y amortiguan los choques que se origiresistencias que obstaculizan las osiilaciones. En fñ
r originan, y lasEn fórma
"^.n,'"-
que
esq ue-
, .En el es-quern^a del sistema oscilatorio del automóvir, represen-tado en la fíg. l28, están incluidos cuatro elementos eiísiiór, ru,
llm- mt * mz' (l 70)
mática el sistema oscilatorio del automóvit está ,.p."r"rtr'do .nla fig. 128.
Durante las investigaciones de las oscilaciones todas las masasque componen el automóvil se dividen en dos grupos:quLvrl¡v v r¡ §s ul v lutrll cu uus gl_uposi masqsamortiguadas.g sin amortiguar. Las masas amorti§Lrr'do. ,. .on-sideran aquellas, cuyo peso se transmite a los elem-entos elásilcosQro
323

suspensiones delantera y trasera, designadas en el esquema porlos coeficientes reducidos de rigidez csr )¡ cs2, y los neumáticosdelanteros y traseros, por los coeficientes de rigidez cu Y cnz.
El coefióiente de rigidez total, que tlene en cuenta las defor-maciones conj untas de la suspensión y los neumáticos, puede serdeterminado áe la condición que bajo la acción del peso Q sLr
Ilexión total
La parte amortiguada del automóvil, como cualquier_ cuerpolibre eri el espacio, posee seis grados de libertad y pu-ede tenerlos mcvimientos oscilatorios siguientes (iig. 129): Iineales:
a lo largo det eje Z -a lo largo del eje X -a lo largo del eje f -
l:1"+ l,:* aQt ,n'
y f" la flexión de los nellmá-suspensión,
angulares:
a lo largo det eje f - i/a lo largo del eje X - X .
a lo largo de[ eje Z - Z .
A causa de Ia dificLrltad de investigar elgrados de iibertad, generalmente durante el
saltost ironesb a I anceo
galop adovalvensacudimiento
sistema con muchosanálisis elemental de
I
I
t,
I
I
I
I
siendo f, Ia flexión de laticos.
De aquí hallamos que
^_a"- ¡
el coeficiente de rigidez tolalA c.cn:-.
0 , Q c.*cn--'T --Ls "n
(171)
I
I
v allí donde nc ca especial' como ocllrregeneralmente e neumáticos son los úni-óos elementos, omo base ilexible.
Generalmen de la suspensión no se
disponen directamente sobre el -eje de la rueda, como esiá con-vencionalmente mostrado en la fig. 128. Por ello, por coeficiente
zamiento en las articulaciones, el rozamiento entre las hoj as de
las ballestas, etc. Otras resistencias se crean especialmente conayuda de amortiguadores de uno u otro tipo. Por regla general,eñ Ios automóviles modernos se utilizan amortigr-radores hidráuli-
oscilaciones, están incluidos los amortiguadores y los neumáticos;los primeros están designados por Éo1 Y kaz, los segtrndos pothnt'! h*.
324
Fig. t29. Tipos de oscilaciones de un automóvil'
la suavidad de marcha de automóviles y tractores se eraminansólo dos tipos de oscilacicnes.. las aerticales y las longitudinalesangulares. Estas oscilaciones son los más sensibles para el orga'nismo humano.
§ 2. Ecuaciones de oscilación
Al marchar los vehículos por camtnos de superftcie uniforme,
fr
Ir
Ir
i,f,
325

carácter periódíco y varían según la Iey:z: A sen col,
siendo /: amplit -' wr'
(172)
o: velécidilica (o eriza la frecuencia cíc-l:periodo ,",li,,.t;
de ras oscira-analiza.los. desplazamíentos z
, etc. De esta maner. ; 1T,::o ''oJ' ;.i,Ii,i',ot'utoo
durante el que lu ,r.u reariza un2n(r) .
an te los cárcuro_s,en,rugar de la frecuenciagu r», l/s, se elgtea tu-i;;r;r;;r'térnica n,Ér :ff,i1.,;$::j:l *i,"ie -:.''"'*nlna por la fórmula:
-_ 60 30
, ,pt,, expresar,ra,d;í,11ür-,ón también se utlizanlüi1?:. o sea, .u .uárr?J;, i; .] núr..o d. ;;;;iu;;"nes po,
.en cualquier sistemareda_d de que si se lese desplazará única-tnado centro de elas_o un punto con un
del centro de elasti-rticales, tendrá tam-a galopar.
ínfluyén en la fre-rasas amortiguadasclones verticales libres :ncial de las oscila-resistencias .n
"r .ñtái .. ::,jil¿,f.,ri.",j*:
mfff (cr* c2)z:g, (173)siendo m:masa..^d-e. la parte. amortiguada, del automóvil;c t * c z :
:¿,li:''J:1:,','.1f f ,"-lt"i§i a .,
- t oi ái I I' Ylt" 1,, p.n -
e: desplazamiento verticat y #, aceleración delcentro de elasticidad.
326
- Esta. ecuación p.uede satisfacersecentro de etasticidu¿ .. i.rri);;;;;T, i: l:;, desptazamientos del
I a .comparacíór
z: A """ l nT;l
'
ii?*i:;Tffi*i' j'i,{i,:+ri:,.d{:/ir:#i,."r,.m,i,l.i
^:^/nP:1f
Teniendo en .u.l.tr, Que A*A : orp,ct*c¿
la ecuación diferen_,?J,l j j'jJ,
Í :. lff .
: I ; ; ::.i;.J,.r 1.3 [-,, 0.. :', :i :: :fl ,'j' il ].:'f ',0,'Í"*'"1:.1'T,,',;;;;::i;''Jr'J':1?l;: , es posible transfoimarlaen la forma ,igri.;-tu:
(((
((((((
(
ttt(ít
d2zAF- + 0'z : Q.
ezla)
g9 oscilaciones/min.
Ias f.r;1uen9ias. de oscilaciones
rr-#{$:is,#L+itr jixil.
ropia
tt(
tI
,3
327 I

I
Las oscilaciones de alia frecuencia de las masas sin amorti-luar se realizan con pequeñas amplitudes.'Estas se superponenn las oscilaciones de baja frecuencia de las masas amortigLradas;n este caso el carácter de las oscilaciones de estas últimas, siendoomunes ias correlaciones en los automóviles entre las masasmortiguadas y sin amortiguar, prácticamente no varía.
Puesto que la resultante de las fuerzas verticales de inercia,ue surgen al perturbar el equilibrio del slstema oscilatorio, estáplicada en el centro de gravedad del sistema, cuanto más cercael centro de gravedad está dispuesto el centro de elasticidad,
El momento de inetci a M¡:mp'#, siendo p el radio de
inercia deindicado, yel giro.
Las condicionesecuactones:
las masas amortiguadas del automóvil respecto al.ejerr-ei anguto de gño; el momento de inercia obstaculiza
de equitibrio del sistema se expresan con dos
L Gu,n * ," ff: Pr * Pz: Gt - cit* Gz-do en cuenta que G1 * Gr: Go*, tenemos
*#+c4t*c222:0,tanto menor es la tendencia delvehículo a galopar.
Analicemos el caso cuando elsistema oscilatorio del automóvilct tiene dos grados de libertad ypuede realizar oscilaciones angu-lares verticales y longitudinales,Para la primera aproximación,dejemos a un lado la influenciade las masas sin amortiguación ylas resistencias que extinguen lasoscilaciones. Entonces, eI sistemaoscilatorio del automóvil puedeser sustituido (fig. 130) por el
rgmento ,48, que pasa por el centro de gravedad O de larrrocería amortiguada y que se apoya con sus puntos extremos Bá en las suspensiones delantera y trasera; los coeficientes ge-:rales de rigidez para las suspensiones y los neumáticos respec-
'¡amente son iguales a c1 ! c2.
Sea que en el proceso de oscilaciones el segmento AB se des-azó de su posición neutral a cierta posición intermedia A'B',re se muestra con línea de trazos en la fig. 130.
Con ello, el centro de gravedad O se desplazó a cierto valor zocupó la posición O', además, el segmento giró alrededor delrnto O' a un ángulo a.
En el plano vertical, en el sistema oscilatorio que analizamostúan las fuerzas y momentos siguientes.En el centro de gravedad O' está aplicada hacia abajo la suma
Ias fuerzas G",, * Pi:Gu^+ *#, siendo Go- el peso de las
asas amortiguadas m, y P j la fuerza de inerica de dichas masas.En los puntos B' y A' están aplicadas respectivamente las
zrzas P¡: Qr- ¿¡71 Y Pz: G2- C222, siendo G¡ Y Gz lossos que recaen sobre las suspensiones delantera y trasera, y z¡z2 el desplazamiento de los puntos B y A.El momento Pze- P1á que tiende a girar el sistema alrededor
I eje horizontal, que pasa por el punto O' perpendicularmenteplano vertical.
3
c222, de donde, tenien-
(t7 4)
b, y puesto que2. mp' # : Pza - Pft : (G2 - c2z2) a - lGt - cP)G2a:G1b, entonces
mP'#{c2z2a-c¡z¡b:O'\t
\l
I
fi
1l
t"'t
t,tt
g. 130. Esquema oscilatorio equi-rlente de la carrocerla de un
automóvil.
Analicemos ahora los desplazamientos verticalestos A y B. Del esqlrema en la fig. 130, tenemos:
zt:z-btgaxz-ba;22:z*atgaxz{aa,
(175)
de los pun'
Diferenciando estas ecuaciones dos veces según el tiempo, ob'
tenemos:d2zt dlz , d,a .
-:.7
- u'-=-,dtz dt' dt'
d2z, d2z , d2a-Zp-: -At¡- -r ú-AF.
Sustituyamos en estas ecuaciones la aceleración lineal #por slr expreslón en la ecuación (174), y 1a aceleración angular
# por su expresión en la ecuación (175) y escribámoslas de
nlrevo de ia siguiente forma:
,nff -t clt(t * #) * czzz(r -S) :o;
*+3 * czzz(t *É) * cÉt(r -S) =o'Realicemos las siguientes transiormaciones de las ecuaciones
obtenidas, para ello sustituYamsu valor, determinado de 1a ecuierior sustituYamos z¡ Por sI vásuperior. Después de las transel sistema de ecuaciones:
d:zt -L ab - P' , d':zz J- ct la * b)2 o. :*dt2 t'-¡1_- ¡ ' dt=
-r mWTl\'t- v'
(l 76)
329
ffi++i# +?+##ázz:o

Denominemos los coeficientes paració¡ 5¡pg¡ ior y ff .; ;;;;j:"H;: ^""ff,,::,,,^oii,.lace e introduzcamás las siguientes designaciones:
ab-¡zi;---!__A. ab-¡za: + p2 - ,ft;
¿, a O<z_: ,€r.
loga a la
J;;":":'JY ros de
A y B. por frecuencia parcifrecuencia con la cual oscilala suspensión trasera fuera
o el sistema de ecuaciones (176)
#+ k,#*a,fz,:s;# + k,#* olz, _- 6. (tz6a)
o?- I
::_* - r- fcoi * cof - /¡,@, (1v7)
!/i :zlr :?7;- [ri +,D; + V(%. Una inf luencia
:j-.:.: t,'i,'¡iiiii',)1 .rmportante en las oscitaciones det automóvitr i z a p o * t i
" irii i !lt,o", ) ^i, #iil), ;f T:1 f:::#i,:: :, . f Tu,,. t..
u:#.sgo (l7B)
(o¡ :
:1ff:11, .ze)
vrera una característica no lineal
:(Dt; §)z:(D2.
las frecuencias ro¡ y co2 adoptan los va-A
I o res:
, Pa^ra e. : l, o sea,ár:0Ukz:0,vlailas parciales:
cuando 92 : ab, elIrecuencias propias
coeficiente de enlaceresultan ser iguales a
Qr
su vez, siendo e: I
((((((
(
(
(
(
(
(
(
t((
(
t((ttC,
331

tico en correspondencia con la variación de la carga causada porel peso que actúa en ella.
Al marchar por camínos accidentados las oscilaciones del auto-
,ia de las oscilaciones propias de las masas amortiguadas del.utomóvil, las oscilaciones adoptarán un carácter de iesonancía.
3. Extinción de oscilaciones
:s irr del camino es frecuente; esta propiedad de,s am se revela especialmente si las irregularidades)n pe una frecuencia de pertLrrbación próxima a la:na d
lo tiene lugar el aumento de la rigidez de la suspensión condas las consecuencias negativas que con este motivo surgen.rrante 1a carrera de expansión el esfuerzo creado por el ele-:nto elástico y la resistencia del amortiguador están o¡ientados
dirccciones opuestas, por ello hasta límites determinaclos la
)
que ampliamente se utilizan, la resistencía durante la carrera de
io*pruiton es aarias aeces tnenor que durante la carreia de ex'
L
2ñr',
siendo Éa:coeficiente de resistencia del amortiguador que se ca-
racteriza en función de 1a velocidad de desplaza-miento de sus piezas móviles, kgf 's/m;
tnt:masa amortigúada que recae en la rueda respectiva,kgf .s2/m.
para tenei en cuenta Ia relación mútua entre el factor de
amortiguamiento de las oscilac.iones verticales y la rigidez de lasusoeniión (la frecuencia o de lasoscilaciones propias), se utiliza el ín-
(180)
de la
dice adimensional
rl¡: h
6' (18r)t
I
I
t
¡
0
I
r¡
l
rt
i
t
t
I
que se denomina faclor relaiiao de
ársortiguamiento de las oscilacionesaertlcales. En los automóviles mo-dernos los valores de este factor sc r
ñulion en los límitel",¡,1-o,rs *'o':. flf','il;,!J,l}i,t' J3:,'::::13',i;La eiicacia del amortiguamiento la carroceiia de un automóvil.
de las oscilaciones puede caracteri-zarse de modo evidánte por 1a intensidad de decrecimiento de
la amplitud de las desviacione-" contiguas +, +posición de equilibrio (fig. 131) o por la razón de 1as amplitudes
*, + de los períodos sucesivos de las oscitaciones. La
razón
D*:*,
oue indica. cuántas veces decrece la amplitud de las oscilaciones
1irápias vórticales por período, se denomina decremento de las
os c ilacione s a e rtic ales,
333

!
.Cuando Do..= l, Ias oscilaciones son.entretenidas, las que enrealidad no existen. Cr?lg.o Do, - -, el pioc;;;-;;' áir"oitigru-ción se convierte en aperiódico. lEntre el decremenio c
amortlguamiento rrLUL ode
pr* iSr u;i;;;; 13:automóviles mode
Por ho tener el tractot ániorbastidor se crean durante la martransversal de las hileras, el tdurante una serie de otros casobajo del .conductor, por lo que frvelocidad de marcha. Por este motivo en los tractores de ruedasmodernos se utilizan asientos amortiguado, ii)i-ií' ián¿icior. rtsistemadeamortiguamientodel-asienio'-*-,ln Do. = 2nr[. (182)
(t(((((((((((tt(tttte
te
tte
tttrt
. De esta manera,.e.l factor g da una representación física bas-tante clara acerca del amortiguamiento dá ü. ;;.ilr.iá,i.r.
§ 4. Algunas particularidades de las oscilacionesdel tractor
oscilaciones de un tractor de ruedas. El trac_t es un sistema oscilatorio, en el q;;;l p"apel de. { de a,mortiguamiento lo juegañ los ñeumáti-C sl tractor es la masa ,in ámiitiguur.'§bro .n puente trasero. La frecuencia de oscilacionespropias verticales del puente trasero dependede la presión del aire en los neumáticosde las ruedas traseras y de la carga queactúa sobre ellas; de aóuerdo con iós ár-tos experimentales existentes, ésta general-mente se halla en los límites de 160-200oscilaciones/min. Tales frecuencias son con-siderablement apara el organla misión del rreducír la f rasiento en comparación con la del puentetrasero A una rdpida extínción de las oscila--ciones originadas.Fig. 132. Esquema del sistema osciratorio de un tractor de ruedas.
algunos casos en los tractores de ruedas se amortigua el eje de-lantero.
334
Separemos parte del sistema general oscilatorio del tractor:<<puente trasero con sus ruedas - ásiento con el conductor». Estárepresentado en la fig. 133 con dos masas: la masa ft:,, que se de-termina por el peso que
. recae en las ruedas traserai (sin elasiento) y la masa m' del asiento con el conductor. Entre estas
. . Sea para simplificar, que las oscilaciones del pLrente traserodel tractor tienen un carácter regular y crean una
-fuerza pertur-
Fig. 133. Esquema delsistema oscilatorio delpuente trasero de untractor de ruedas conel asiento y el con-
d uctor.
335

0
0
0,.
orli
ooooooño0ao0ro
0,Q
rlri
,sr[iroiQ
rñ
ñfl(lao
*' #l c'z':p.,senco2l,
D-f
,0L
sen rorl,
(l83)
(184)
determina lasen (l)2/ : l.
(184a)
, d2z'siendo z'y ii:desplazamiento vertical y la aceleración del
siendo 1¡' : frecuencia angular de las oscilaciones propias delasiento;
flexión del elemento elástico del asiento durantela acción estática sobre él de la fuerza perturba-dora máxima Pq;
I ..:-ñ;\r-: coeliciente que caracteriza el dinamismo de acción,- \;'/
de la fuerza perturbadora,EI desplazamiento máximo del asiento zln*, que
rmplitud de las oscilaciones, tendrá lugar cuando)e este modo'
^t - P¡ Iémáx-7- ,_(lLy'' \a')
De la ecuación (l84a) se deduce que la amplitLrd de las osci-aciones del asiento depende en sumo grado de la correlación deas frecuencias o¡' ! co2. Sl estas osctlactones cotnctden, entonces'rn*: -, o sea, comienza la resonancia. Para evitar las oscila-iones de resonancia es necesario, que la frecuencia r,¡'de lasscilaciones propias del asiento se diferencie 1o más posible der frecuencia iu2 de la fuerza perturbadora (frecr-reniia de lasscilaciones propias de la parte del bastidor del tractor, dis-uesta bajo el asiento). La frecuencia deseada de las oscilacionesropias del asiento puede ser lograda eligiendo la rigidez ade-rada _de su suspensión. En Ias estructuras ya aprobadás la rela-U, #:0,5 -i 0,6. Para conservar la constancia de la relación
l6
Po
c
!!- para diferentes pesos de los conductores, /as suspensiones deO2
los asientos en los tractores deben hacerse con rígidez regulable.Para la extinción de las oscilaciones en el sistema de amorti-
Fig. 134. Esquema para la sustitución de una suspensión.elástica de balancin"de un tráctor de oruga por una suspensión convencional equivalente:
lspensión real; á-suspensión eqdivalente.
luación técnicos deben ser completados con una apreciación mé-
dico- lis iológíca.El sistema oscilatorio de un tractor de oruga, con la primera
aproximación, puede ser reducido al mismo esquema que se. rLtilizaal analizar las-oscilaciones de vehículos de ruedas. En calidad de
ejemplo en la fig. 134 la suspensión elástica de balancines deliiu.ió, deoruga Ár-zs (DT-75i (esquema «a») está sustituida (és-
t/rl2 3ar, fi9 337

§ 5. Indices de la suavidad de marchaEl proceso de oscilación se caracte,riza_ por las síguientesmagnitLrdes: ra'c f recuencias., tas-.ailpiitudrr, ra aerocicrad'cre osci-,:::i:,r:r!:' acetertaciones s t'a oetáciiá'¿ ¿, iii¡oriá;"";;ir,, acete_
cha según las aceleraciones esI valor de las aceleraciones, su338
repeticíón. El registro en conjunto de estos dos factores corres'ponde al punto de vista de los fisiólogos acerca de la fatiga, comoóonsecuencia de la intensidad y frecuencia de irritantes externos.
Desde el punto de vista de la preservación de las cargas quese transportan, la repetición de las aceleraciones tiene importan-cia en aquellos casos cuando la carga está instalada sobre ele-mentos elásticos y la frecuencia de su oscilación puede ponerseen resonancia con la frecuencia de las oscilaciones de la caja.
Al mismo tiempo se debe señalar que con frecuencias hasta5-6 oscilaciones/s en las sensaciones de la persona ejercen unaconsiderable infiuenci a la oeLocidad de acrecentamíento de lasaceleraciones, o sea, Ia tercera derivada de los desplazamientospor el tiempo. La cuestión es, que con un rápido acrecentamientode los golpes transmitidos, las reacciones de protección que seelaboran en el cuerpo humano para contrarrestrarlos por mediode la correspondiente tensión muscular, no se originan a tiempoo resultan ser insuficientes. De acuercio con los datos del profe-sor A. Birul las velocidades de variación de las aceleracioneshasta 25 m/s2 provocan una sensación molesta y con 40 m/s2, unasensación desagradable.
Partiendo de estas premisas, J. Bronshtein propuso para laevaluación práctica de la suavidad de marcha del automóvil unaescala de cinco grados, en 1a cual el grado respectivo se adjudicapartiendo del número de golpes y de su intensidad (valor de lasaceleraciones máximas), que percibe el automóvil al recorrer unadistancia de I l<m en condiciones del camino determinadas. Laescala tiene el siguiente aspecto.
0-l
(t((((((tIt(t(((((t(t((ttttttttttt
ExcelenteBienRegula¡Insuf icienteIluy mal
t5-2025-30
2-5t2-t530-40
l-2l0- t2
I
2-5
Por ejemplo, si las aceleraciones alcanzan valores de 3-5 m/s2,la suavidad de marcha puede ser considerada en el mejor de loscasos buena, a condición de que el número de los golpes corres-pondientes a cllos no es ntayor de l-2 por l km de recorrido. Sióon las mismas aceleraciones máximas el número de golpes es de
Aceleraciones verticales máximas, m/s?
Eyaluaclón de lasuavidad de marcha
Número permltido de golpes por I kmde recor r ido
r¡r12r 93e

ft
\l
1l
rf
Irl
It
tI
,6
t'
t'
I
{
t
t'
(
t'
I
I
I
t
I
t,
I.
vil en el camino dado
magnitud media ccatés Girgui-¿irá aceleraciones aerti-nos coir ¿iiu.1o mtro marchar p-or cami-obtenidos d;r;;i;.i;, cuerdo con los datostúa poilá i;;;;i;,'"" de marcha, se efec-
de los automóviles y tractores se llevan a cabo generalmente en
los laboratortos g en las condtciones de expLotación, por carreterau en el cam7o." Durante' las investigaciones en laboratorios se determinan losDesos, las coordenadas del centro de gravedad y los momentoshe inercia de las masas amortiguadas y sin amortiguar,.la rigidezde las ballestas y los neumáticos y la resistencia de los amo¡ti-guadores. Teniendo estos datos, es posible calcular parámetros
§ 6. Investigaciones experi mentales de lade marcha
Las investigaciones experimentales de
oruga.En el eje de las ruedas
asientan los apoyos .f , quecojinetes de bolas. Los apoyosviga delantera del tractor se
l2 3ar. áa9
motrices del tractor (lig. 135) separa disminuir el rozamiento son- se colocan en los montantes 2. La
apoya mediante el soporte 3 sobre
su avi d ad
la suavidad de marcha
(r85)
siendo "::SJJll,tlJotal de observaciones durante el ensayo (un
10
¡
I
Fig. 135. Esquema de la disposición para determinar el momento de inercia deun tracto¡ de oruga.
tan importantes desde el punto de vista de las oscilaciones comoel coef iciente ¡r* de las masas amortiguadas, el radio de inercia p
de la masa que se estudia respecto al eje horizontal transversalque pasa por su centro de gravedad y el coeficiente e de distri-bución de las masas amortiguadas.
El método utilizado durante las investigaciones en el labo¡a-
sión. En calidad de ejenrplo, analicemos como se utiliza estemétodo para determinar el momento de inercia de un tractor de
E
341

t. .T.::1, del tractor respecto a Ifórmuia:^t2¡c
!: "ot-(2n)z '
[ -¡rc.s: 1 - ñR2,.s2/cm
de ^l3s iruedas motrices y el eiea por el centro a. grru.doá jli
342
carrocería durante la carrera debajo al mismo valor, después de
quita rápidamente y las oscila-an de forma análoga a la an-
mplitudes vecinas de las oscila-
ropias del tractor generalmentechoque». para ello iri..iá."nt.
II
ÍI
i
tI
tI
I
I
t(((((((((((((Fig. 136. Esquema de la disposición de un camión en
cilindros giratorios.el banco de pruebas con r(
" ciones de la parte delantera delPara excitar las oscilacion
versas velocidades de marchalas oscilaciones (desplazamien
r(
(,t
rf
r(
trf
t,(
((tt
343 II
l2*

it1t
tI
f0
f
ff6
{'
1'
('
t:
It
t.
f
1'
1.
{.
t.
lr
t'
tr
l"
t'
I
t'
ll
lr
lr
lr
lr
lr
(r
§r."1§\t§L
N'l
I
11.".::::,:l:ljj.lTr,captadores y se registran en el oscilograma.ros correspondientes,captadores y se registran en el oscirogranl;: l...lJ,
r"ql^' - 1., ] :: _:l:, {?,,.
- ..p'r...n t an. en
- Ln á'
-!ra ri
{I,F ^!T,\, ,que se deñá^i';;-L;",,;i,,i;i;;;"7;i'i¡t,i'i_tiiil,,E:i;'Z1,deLun wrLLLuLLUrLes. r,n el eJ e de abscisas de la gráf ica se trazanlas frecuencias nper osciiacionesl*ñ-;. ra r¡serza nertrrrh¡rrnrenln Oe la lreÍza perturbadoray en. el eje de ordenadas, las
- np,oscil / nin
Fig. 137. Caracterfstica de apmlitud-irecuencia de las oscilaciones' d. ,, curva de las oscilacioña, ,alr-automóvil.
tivas de 1a carroceria 2"a, -
Las inoestigaciones por carretera (campo) de la suavidad de
taria y Ia marcha por irregularidades que se repiten con una pe-
riodicidad sucesiva determinada. Durante los ensayos por carre-teras o en el campo se eligen los sectores con el microrrelievemás característico.
Al utilizar los índlces estadísticos es necesario que la largurade los sectores de control sea suficientemente representativa, es
decir, que las aceleraciones medias cuadráticas y otros índicesobtenidos en este sector sean iguales o, en último caso, se diie-rencien poco de los correspondientes valores que podrían ser ob-teniclos al aumentarse el número de las observaciones en sectoresmás largos.
Hay sólo recomendaciones aproximadas acerca de 1a larguramínima suliciente de los sectores de control. Por ejemplo, se con-sidera que para ensayar la suavidad de marcha de un automóvilla largura de dichos sectores debe ser no menos de 500 m encarreteras asf altadas y no menos de 250 m en carreteras de gLrijode calidad satisfactoria. Correspondientemente para los ensay'osde la suavidad de marcha de los tractores en caminos de tierrade estado satisfactorio, se requieren sectores de 100-150 m delargura. La longitud de los sectores de control también debe co-rregirse en dependencia de la velocidad de marcha a la que serealizan las pruebas.
Al determinar las oscilaciones de baja frecuencia en los asien-tos de Ios conductores de tractores se toma que la duración delas mediciones en cada régimen no debe ser menor de 30 s.
Para facilitar la elaboración de los datos estadísticos experi-mentales se utilizan diversos aparatos especiales de clasificacióny análisis de 1a información inicial, 1o que a veces se efectúa auto-máticamente en el proceso de los ensayos.
Los automóviles de turismo se ensayan con plena carga,mientras que los camiones se ensayan sin carga y con diversoempleo de su capacidad de carga. Los tractores deben ser en-sayados durante 1a marcha en vacío, en régimen de transportecon máquinas suspendidas, dispuestas delante y detrás del tractor,así como también con carga de tracción en el gancho. Todos losensayos deben realizarse con una serie de velocidades de mar-cha, características para e[ tipo dado del vehículo y de las con-diciones elegidas de los caminos.
Las mediciones de los parámetros del proceso de oscilación sellevan a cabo con vibrógrafos o captadores de cuerda si se re-gistran los desplazamientos de los puntos de observación deliistema oscilatorio, o con aceterógrafos que registran la acelera'
: f (np..), y con línea de trazos la curva anároga para ia Íueda¿-rued
[ \nper).
del camino; en los sectores de la curva, donde+< l, se revelael efecto de la acción cle la suspensión de la carrolería.
En la.rar.u "'"4 hay dos picos: uno en el punto B, provo-cado por la acción t.-,^. oscilaciones de. la carrocería en la rueda,:l otro en el punto C, donde .o..rr¿ l, ,;;"n;;;i; áá át, ir.-:ueucia de la rueda
Las oscilaciones se considerrente de ., lririrl.za ellas se ente-
iales -igrales. Los ."¿"iá, ñ, i:::,stos últimos han obtenido una
44 346

Por la fó¡mula
Para los tractores queLos resultados de los
Coeficlente k g f/cm ((((((((((((tttttt(ifrt
((
rI
,(
,(
,t
rf
t'f
Vehículo que se estúdla
Ejemp.lo l. para un autc
iiü{,'.}!1}.¡ffi ll{1,*l'H,""*T".'j:iff
,i::'?:rllry:"1.,T;Í:'i#H',,:*lli'l:ü':l:.'""ffiJli'*oi,!:i'iT8;"i",".'JIjBi ,r""'i^l:i:ror^ de
.¡ue-de, Ios coef ici.nt.. ¿._.1_¡ v q,/,u, ,guaoo, Iue¡on medido, ioiuuio?ur",,
;:f:'i-::, "1";,:"iJ:"i'iá'.?í'.1,',.1'i.'i,'.1,:::'"rf i^i.l::ril , 'ü;.1.1"'r'
,1".H lll::. :l,r_,_ a. i".' Ei".li,J,i.i, i..i,.J,i[i'fl"l,ljl;:".,r,,.1*:,,., §i.:itliJ'!:#;:'fiX,r,.,1"r.":ii::i::, 'á;'r"i."
,il.J::H;,,x,'."'.x;LilJiHr{i.t*i,#i:}t{É:}"i:,tJ,1,1',.tlltJ::;t}rxin,atüii."'.',
"l:hÍiJiHj{ffi];:,,r,i'Jtil5j;¿iixi*"*."..l,,"tJ:.,riil.*l:p,,, r. i .á1.,i iJ J -.",
?,i,1.# ii J ?Í ¿,§.1,,,.1, I 13. :,._, ¡1Tiii :, A:ll:,Coeflclente de rlgidez (para
kgf/cm
5 t,6
| 3:i'f i::'JÍ,j,.:,1':l,i[';l ::tl:"ri.j,'^'ri']:i,-" ,q. ras irreg.uraridodes (dis-tancia S') y. los vrlores críricos ¿é lá. i.j.iá;,"'"" "" rds rrresurarrd3t.res (dis'las que r,j o"iÁiñrian tr".irr"inno* rrp rocn,,^^^;^ ,les de ma,rcha áel tractor, para
'i',j 3, !i**, L' j T ""Til?' i"I' ; oi :i: : ii'"r ir;- il';;'
j, ü)t ; :
p¿,,..,J¡jll,;,li,l,l"; rl:""yl.i: fl":lll:l*,.r'iiuiL". por un campo donden :iJff,,:.JiÍ&,Ttá l^l,rr;;.:.;il,ii.,,ii.,-!Tr ;;,,,l:i;:.l;,, i:,.Iffi8.or:;Í:cam,ino de tierra de calidad satisfactoiia
Automóvil dedad máxima
lurismo con lade pasajeros
EJEIIPLOS DE CALCULO
dos ruedas),Vehículo que se estudla
Datos iniciales:. l.. !a: frecuencias de Ias oscilaciones Iibre
e¡es aetahleio-;,..ü;;.-; son respectivamente,*ro1.f.lnd'*en[ales (bajas) de los
nr : 150 oscilaciones/min; nz : 200 oscilaciones/min.
i; uut.;¡":?flEl rj.e #.1i,,.1",; f¿1,11,§,n
er camino de tierra s,:2 m.
,,:+HP : rc,2 {osciraciones/min.
Teniendo en cuenta.que la. resonancia comienza ar coincirrir las frecuencias,1:.',':."'r:l:=1i'r,ii"o,á. v trs roriááas.-"oú'i.n.,no. rcspectivamenil-io. ,:"-
para el eje delantero
r/.",r:#:#f = es, km/h;
los coeticien[es de rigidez buscados , : _ ".%_d.*c.
no tienen suspensrón elástica t¡asera, c^ : ,cálculos están dados en la tabla siguilte.-n,
de
I
En losces mayor la rigidez de es en muchas ve-;i;;j;i;. .,'i?,lil,Jl"l,l j:',¿:tn:1.:¡ri:3;l.lot rl?i '¡'teml c'n;' acióa es bastanre
Ejempro 2' Un tracto-r -te rucdas, marcha sin máqu,nas por caminos ruralesy de tierra, cuya superficie.se caracteriri poi'i,
-existencia de irreguraridarresque se repiten periódicamente ^y que tienen Ln p.rlii'.i,i,l'i^, v'*.ijl*ii.pr.rt^,a una distancii dererminadá s, ürá ;;"i;';i;utnrra cada camino.Se requiere:
Iractor máqu inas)
Aulomóvil de iurismo (con Ia canti-dad m¿íxima de pasajeros)
Camión
Tractor de ruedas (sin r
* Teniendo en cueltta la
ruedas (sin mriquinas)
346

pará el eje tr sero
v ¡es2-# : #f - l2s' km/h.
sustituyendo en estas. exp.resiones los valores dados de s,, hallamos lasveloc idades- de ma rcha criricái'builá¿;", ;; iá.toilen el canrpo donde había maíz V ,u", _ 6,8 km/h;
/rus2 =8,4 km/h;en el camlno de tierra I¡es l o lg km/h; v res2o24 km/h.
.,o,.uJi?iii1l.':i.J,:,;.i!,,*:,*l,.,ll1,.nu conro¡me a r perrn der camino, es po.
,. .j?i."TJJt: l;,il ,Xl,,er,"n,-¿vii'á. rurismo para. extingrrir las oscilaciones de
s. ;;q;ie,. -¿;;i;;i*,X"'.,'uIl#]:J:.r.Xl.ü.}¿Í-rti;,u..,*
X".t,,.,,üiil:,..,"...propias. verticales Ie la suspensió; tr;;urá'?;"il cu.ro..rlu.Datos iniciales.coeiícientes de resistencia de ros amo¡tiguadores reducidos a Ia ¡ueda:
durante la carre¡a de compresión É:o, : 0,g kgf . s/cm;durante la carrera de expansión k|;*p:Z,q kgf.s/cm.
o. i"n?,?,'uirlut ".,t amortiguadas que recae en una de las ruedas traseras,
,, ilr:::i,'r'.,3;.jiil,::"''ciones propias verticales de la suspensión trasera
.r,"3,"Ji?l|lemos ei valor medio del coeiiciente reducido de resistencia de los
hu: 0,5 (¿:", + É:*o) : 0,5 (0,8 + 2,4) : 1,6 kgr . s/cm.
"r.,,?;"fl:,.;f,,::[r,, ecuación (180), el coeficiente de amortiguación de tas
h_ has - l'6'981: rc; : l,e6 I/s.
Hailamos el varor de[. coef icie¡_te rerativo de amortiguación de las oscilacio-nes propias verticales por Ia ecuación (i;ii-:'- -'
,1, : g : 1,96==30 : o rs' rrflz ¡80
L::.J.rJ$:i.??:HjÍ?' de h y rt, se halran en los rrmites recomendados.
Ias oscilacibnes uerticalese por la ecuación (t82) .i ¿..i..ñ"ü"iüg,jliiiri." ¿*
ln Do" = 2ng:2¡0,2J:1,44,de donde Do" = 4,J.
EI decremento " , jld.ig, cuántas
. veces disminuye la amplitud de I¡soscilaciones propias rtic¿res por períádo --rii
".tu iorma, los amortigurrJorcs[r.1il:1"""r..:"
., .,,, óvil asegurari-rri ,nilitüracron bastanre rápidá de lrs
Capítulo XII
Cálculo de las transmisiones
§ l. Cálculo cinemático
Las relaciones de reducción necesarias para obtener Ias velo-cidades requerldas de marcha del tractor o el automóvil se deter-minan partiendo del cálculo de tracción. La distribución de larelación de reducción total de la transmisión entre cada uno desus elementos depende del esquema cinemático de la transmisióny de los mecanismos de reducción que se utilizan. Con el propósitode reducir las cargas en las piezas de la transmisión es racionalla elevación de las relaciones de reducción de sus elementos fina-les.
En Ios tractores las relaciones de reducción de las transmisio-nes finales se hallan en los límites de 4 a 6, si la transmisiónse realiza con un par de engranajes y de 8 a 12, al utilizarsedos pares de engranajes u otros mecanismos de transmisión com-plicados. Las transmisiones centrales se ejecutan con menoresrelaciones de reducción que las finales. Los mecanisrnos planeta-rios de giro de los tractores de orúga durante el movimiento rec-tilÍneo del tractor están embragados y de esta manera formanparte del esquema cinemático general de la transmisión; la rela-ción de reducción en los mecanismos de un escalón generalmentese toma cerca de 1,5.
La relación de reducción de la transmisión principaI del auto-rnóvil es igual a la relación de reducción total de la transmisiónal trabajar la caja de cambio con la marcha directa. Al utilizarla transmisión principal única, la relación de reducción requeridase obtiene con un par de engranajes cónicos o hipoide. En loscamiones de capacidad de carga media y grande frecuentementese utiliza una transmisión principal doble, en la que el primerpar es de engranajes cónicos y el segundo, de engranajes cilíndri-cos. En algunos camiones de gran capacidad de carga hay, ade-más, transmisiones f ina les en forma de reductores laterales, dis-puestos junto a las ruedas o reductores de ruedas, dispuestos di-rectamente en ellas,
349

| 'c (Jr)
(r87)
do li"1*¡ : rel ación .de reduccióncalculada de la cajacon la marcha que seexamina.
l.-:7. a/ _ s- ¿c (.r)
' l*ic(r), éx::zlTi;,
En Ia fig. I3B, á está representado el esquema de una caja cletrcs árboles con march.a di¡..t;. i;"lel'rcion. de reducción de estacaja con cuatquier ¡_¿sima'má;;'h;'.^;i;yendo ta directa
con su valor para la ma¡cha ade.e carácter cíclico, cuando durantecarga y vuelve atrás sin ella, ele-
iaI
z
un
de la relación de re-de las relaciones de, de cambio de mar-los engranajes de Ia
¡ -24o.: -i, (186)
- El.núme¡o de dientes de los en-grlnajes motriz 2., y mandad"->iJ:"cada.uno de los pares conjugadoi secalculan por las 'ecuaciondsro - -vv 'v
siendo ic(o): reración de reducción del par de engranaies constan-tem.ente engranados,. que unen el árbor'¿e entiaa-a-/ ;; ii int.r-medio 2, y i"@t: relación ¿e re¿uccián de loi ;g;r;;j;r'que seconectan con la marcha dada y qu. ,nln .r'lr¡ái"i"iá?ili¿io .onla ca(rig.
Tzs
Enpar
$
t.
((_
((((((((
(
(
{
(
(
(
I(
((
(((
I
'c (.r)
350
i :i ;tc (.E) -c (0)'c (,r), (1 88)
351

Dirccción dcl ilrrjt' tle potenclaRelaclón de reducción
de la serie Observaclón
elementc conductor elenrento conducido eslal¡ón de Ireno
Engranaje central Brida de arrastre Engranaje de corona-t-. ¿l -1' .3
tp. t: -i,- T ransm isiones
tiplicadoras
s Hm:[§q r#rTJ ñ'TE -'R a @!?--a c) (e J¡ » €oe á9..3 S- áso3 -o 3 - ;'.< =-{ N =
+a. i. do].^ o: áY.o- @ü;'=."1 @'-a7Ñ (D ñ
=O :! - : ^ 05
*i g*ñ ñq dto-oá';Iso !oi 4áe r§i iÉp F.ñt L < aa-q¡P Á ^ ñ Éa) A) J ;< E(§ O 3350- f;E== NPñ q) E " :-r ñoo
-'- o-E E;_§'E e*._o!.",o- B6§ 3f **-ñ: sEñi*o -í 3- n, .?. .\Ne += =-:qɧ3^E.,' =SB
F3 3'38 *3 ñ *i* g,3É'i B q+
;E §'1Eg FarE I fu:;3 3;-F¡F ".ñ ñ ¿3:=.q-e* "e 3, 28.c-D- § A-X: X';'c:ll - = Y' ^toá",-; : iFSF s á a'] =: 6 3 5.É
r I ¡§ =;=
iq áE,s sE;g if.D =lJ r: o r¡qH -i _o, - "'= 39^ ll * N g- 5';'; P' §- - o-E.
:;sFt I ár+* s si 5; §lá;X=B-Uá=E5 ÑBEt= +='3Él+g;3:áE Ea"11 ;ao--ro E =ó o-=io-K
= §T¡i=(D lJSaG-:f rD!)rDo ,,"aoú, 1 Fá'
Tablo IRclaciones de transmlslón de la serle planetarln eplcícllca
Engranaje central
Brida de arrastre Engranaje de corona Engranaje central 'p.l zt*zt
Engranaje central Engranaje de corona Brida de arrastre
Tr¿r¡rsmi s ionesp lt'cadoras
Marcha atrás conlr.¡)l
Cl)CJICr)
Brida de arrast¡e Engranaje central Engranaje de corona zt* zt
Ir,larcha atrás con ¿p. | < IBrida dc arrrstrcEngranaje ccntralEngranajc dc corona

engranajes &fr, el orgranaies D, o bien'h:, 1t,?tl:-l:o l' ll'o,9. los dos pares de en.granajes Dr o bien 4,qrá;r;;;i'á;;; Y'ros oos pares de en.con el de salida J. Eí Ér"";;";-;i:^""r,rrrtermeoto z de ltg a m a d e", a r c h a s, Pj:
üi1T I -;r,'-* % j' j iJ#' fl
';,",' j; li, :' i :i?h f ' o 3 "#: fl : .';, XJ"
É
i""'j { ,.;: ¡ i1;9,",id "
J iI# : ; !1 í if" li, :' igama-de marchas atrás. ó-o'mÉirrrárt"l /rr2 srrve para acoolar la
f , y Fr.on-.i LIo*u ¿¿, es nnsihr^ ^r-,^Tondo de los .mbrugu.s
fi f. ? il; ij.o l",,,o f :" * ij{ ; ;l;ü: "";i"',i.',' : :,Í :"' H,:}o,T g X::y con los enjbra;1H. i ;:j' J,T,' ff "0*.' i;, ?, t,
^11 ^t" .] y,:1._ r,:' üá.' i,L,. r, u,
l?:ii!¡... ta retaiión ¿i, iéár..iár'..determína por er p'oar.tá-á.' iá'?iilirii l?1'J;1..o,?i'iii.JÍl ;:engranajes que só acopla .on^il';;I;;gr. correspondienf". n.,.engranajes que sé u.opi, ;;r^:i ;;;;;sl: :..l?:!i"Xrl:LL:,rÍ:
:ig. 140. Esquerna de una caja con calnbionúmero a. gurr"d"2'Irchas por medio de embragues; Fig. l.{1. Esquema de una transmisión hidrostática volumétrica.
sobrepresión: . crlyo- valor se regula con la válvula de derrame 4.La velocidad de rotación dél moior hidriulico y;;; conse-cuencia movimiento del vehícirto,-¿tpélá" por unlado de la bomba y por el otro,'clei'ioü"men dellíquido, por el ,roioi hidráLrlico'
árbol ( iactor constatite clel ntSiendo .lu bomba Q¡ l/min y. éidel motor hidráulico igual a q,,., l/rev,'él árbol"delgirará con una f recuentia:
Q^fln-t.h: ,l_ r. p. m.
, Puesto que. el rendimiento teórico de la bomba al sirar conla frecuencia de rotación n,, r.p.m. del .ig,i.ñoi"á.1 ;"?;;'Q5: qun,rrlf min,
siendo 4¡ : factor constante de la bomba l/rev,la relación de redLrcción teórica de la transmisión hidrostá-tica
, ll* qm¿hó.t::-
/lm. h (i t
tIttttttttta
ta
e
e
I(a
e
(I,t
oeoo
4(r8e)
355

,, L, relación de transmisión ¡eal de larh.
",r a causa de las pérdidas es inferiordetermina por la ecuación:
t¡ansmisión hidrostáticaal valor calculado y se
ií.u.t: ffTuonu-, ( I 8ea)
iendo AP : diie¡encia cle presiones de ladel motoi- y en su cavidad departe de conlDresión
derrame, kgf/cñr2.Teniendo en cuenta Qu. ffi: q* l/rev, obtenemos
motor hidráulico, a medida que se pasa a verocicrades de movi-miento más elevadas de acueido con'la disminución del valor delmomento .de impulsión requerido, es posible, como es lógico, uti-lizar una bomba de menor rendimiento.
ilizar motores hidráulicos regulables es posibleisiones hidrostáticas en variás gamas; ésto seel número de los motores hidráulicos que seson va_rios, o cambiando su esquema de unión,tores hidráulicos no regulables con caias de
cambio mecánicas escalonadas, dispuestas"tras el motor Éidr¿r-lico. La regulación sin esca Io-
siendo ry¡ y 1r,,,: rendirniento volumétrico de la bomba y dellico respectivamente.
tlÍn.¡,2n:0,01 ApFSi kgf .m/rev,
nes de las relaciones de reduc-ción de Ia transmisión en estoscasos se conserva únicamentedentro de cada gama.
En las transmisiones hidro-mecántcas de cambio el conver-tidor de par hidráulico, comoya se dijo más arriba, siemprese utiliza en combinación concajas de cambio mecánicas es-calonadas de uno u otro tipo,que generalmente se sitúandetrás clel convertidor hidráu-lico; aqLrí, la potencia delmotor se transmite sucesiva-mente, primero por el conrrerti-dor hidráutico y después, por lacaj a de cambio nlecánica. Du-rante eI cálculo cinemático dela transmisión hidromecánica segarna utilizable de Ias relacioneshidráu1ico.
Para disnrinuir las pérdidas en el conr.ertidor hidráulico y deesta manera elevar el rendimiento total de la transmisión hidro-mecánica suelen utilizarse sistemas de aos caudales, en los cualesel flujo de potencia que viene del motor se bi[urca por dos di-recciones: una de sus partes se transmite al convertidor hidráu-lico, la segunda pasa por el eslabón mecánico, eludiendo el con-vertidor hidráulico, luego en el árbol de salida ambos caudalesse unen.
En calidad de ejemplo en la iig. I42 se representa uno de losesquemas posibles de una transmisión hidromecánica de doscaudales. Parte del itujo de potencia se transmite en la direcciónindicada con la flecha.4 al convertidor hidráulico, de allí setransmite de la turbina al engranaje cie corona con un númerode dientes z3 del mecanismo planetario; la potencia restante delmotor pasa directantente en la dirccción señalada con la ilecha C,
'4{*. h : +P 4n, : 1,59 aPqn,.
5
Fig. I+2. Esquenre de una transmisiónhirdomecánica Ce dos caudales.
debe tener en cuenta toda lade reducción del convertidor
357

il?ufl?.9'T1:','',' a .continuación,
1;1; Lil:,._,,,i, oá
:,0 ?. Í :, ¿i ii; ii
uerza tiene. q.ue pasar por metroesta condición ^coiieJp"onae la
/
I
I¡ -nb I+('t.h-7f,: l-m;, (le0)
siendo K :3!z¡ el así llamado número característico de la seríe
q:i,,?ioá,'.1':11.';'" ]3',es tán,d a res I": ^íl!91.: de toma de ruerz a
lZl;,,'r,y;f ,'ol'ii""lii,Si;,X:i,::.,,.lJ;:i»*ilii:l?:Zil;f¿ii
i:,;,Í.:: i?l:.i : u i::ffi:x: ;
r5B
de donde
,il=^il_di9 de.las ruedas motrices,
.,,i 1
"o :
^,f : : : : g: : 91
11. á" á;, *; ;;. ;n I ti p íJ
(-
(.
((-
(
(
(
(
(
ttt(
itIe
e
a
'l(a
m.de
siendo ¡o: relación _de redLrcción de I
:,11.;í a.uor ¿" .áliá, :.. i;'.;:uJT:i:i.j:,J,H,""111:
(ret)
tones:, .i: :::
o,,J,l ;::lr,l;l; r";; ii;:i á;::, á?
1u^e d a s, p e r t en e c i en t es
metro rte ¡pnn""i.r^ 91,9:9 , l'4. .t, m.: s,¡ + á,1í;;;lr.i;;"-a las clases de tiacc:_rq¡q
¡vJ L¡qLrurtrs oe rueclas, pertenecirpor metro a" """^""191 ll,9:9 , l'4. .t, m.: s,3 +1,í;*;ñ'.iilo.,"
"r".1' ?, * Í:, : :. "l:Lr^o
. á I . i, r,, ¿ o., ul; i ñ i il,--1",:.1,,.: ll :l,f l-
"; :o :S
"á;" t?,H;,i: ?;:ll I, ?,,..loilÍll o1
",.if:que /r¿ : 0,4 + t,0 revorr.ion.i-fir"i ,n ]."i.i;,i;,.;;,,,.or, en los
§ 2. Regírnenes de cargaPa'a las piezas de la transmisión hay que carcura r ra res[sten-,,i:::::,?^l1ni,1ndo, .n .r.rio 'i.r "ódr[r.s
sobrec¡.o,e ñÁ_;cia mecdnica tenien-:
'q !¡q¡ro¡rrr¡rurr tlay quemra innr,,.,^-¡^ , Ldo, en cuenta las pósiblemas, i n cr.uya, á;
^'ü;;""' rJ.l'"jl rlt?o,lot'
o'.s sobreca rsas má.r i -causa cle lá"-.rárJ cíclicas tlo o¡¡iÁn *.i.,!,_el limite de" f attga a
k,'. .. "l i,.;,X.,á,, .,
Í ;
"r"? : i n; i:iíi,. L J; : I',i, ., . á . t. . d i n á m i c o
,u/,|i.".. :,,",,1q :::l^ li- ili I "
. 3?' iH I ; ,;: ;?. l,o I i á i i 1.,-. I' i.iT j
3; n:""';1.Íi i;ó g'"x ;i i$::H I r r-T,'[T, i j'J.'J"';
.: : JJfi i,?"t; :,. I lff ;j :' H', f,1;1 :l g i"":,"j,:li:ip ;e I, i.',i::.',T ¡l' H;"X??;9:,,l:li,]rll con .brusco acoplamiq¡¡yL,L LUrr ul,usco acoplamiento del entbrague ar.al rn¿,pSJIgroso, desde_el punto ¿. íirtr'áál srroi_io.rn ^_ r^ L_^--_ .del surgimiento-en la traniÁi-
nente él se tonra .omn heco ols ió n d e c a rsa s ¿ i n ¿inic a s ;
-g.r..ir#Ei, ¿' :?,*, ::Hr.:"f
",;Xt'.-i i
359

calcular la resistencia mecánica cle los árboles y ros engranajesde la transmisión.
como han mostrado ras investigaciones al acoprarse brusca-mente el embrague cs capaz de tsu momento estático calculado dcaso aumenta el coeficiente de rde inercia del dísco de presiónplazan junto con é1, puede incraprietan los discos conductores
giratorias de la transmisión ytransmisión se cargará con rrñlleva al embalamiento de las
ser mayor que el momento está-s motr.ices con el camino.to, el momento dinámico calcu-
forma siguiente: gue puede ser expresado de la
de ello, se debe considerar favorable la inclusión en el acciona-miento de mando del embrague de Llnos u otros dispositivos que
regulen la rapidez de su acoplamiento. El problema de la cargadiñámica se iesuelve de la fórma más radical utilizando embra-gues hidráulicos y cajas de cambio hidromecánicas, puesto que
ñabiendo un enlac'e hidráulico en la gadena de fuerza de la trans-misión asegura u suave y gradual aceleración.
En la tiansmi sur-gir calgas dinámicas considera-bles no sólo en I de fransición, sino que también en
ciertos regímenes trabaio. El problema reside en que
las piezas de Ia transmisión pueden sufrir cargas dinámicas adi-cionáles a causa de Ia inexactitud de maquinado, desequilibrio,deformaciones y otros motivos internos, por ello al calcular cadauna de las piézas se deben tanlbién iniroducir sus coeficlentesdindmicos.
Los cálculos de resistencia realizados según las cargas máxi-
estados límites un coeficiente de seguridad de 1,2 a 2,0.Como base para los cálculos de Ia resistencia a Ia f atiga
deben tomarse datos estsdísticos, acerca de las cargas que actúan
dependencia de Ias condiciones regionales, de la rama en que.ser-rtilizan y de diversas causas de organización. Por esto, es racio'nal realizar los cdlcttlos de resistencia para uarios de los mástipicos regímenes de carga.
Además de conocer los regimenes de carga para el cálculo dela resistencia a la fatiga de las piezas es también preciso tenersus crruas de Iatigtt que establecen la relación entre Ias cargaso las tensiones, que puede resistir la pieza y la duración de sutrabaio por ciclos. Estas curvas se obtienen por vÍa de ensayosen bancós de prueba de una u otra estructura con diferentes car'gas estacionarias cíclicas,
M¿in: (drnlVfemb. cat, (1e2)
(le3)
siendo lvfemb. car : momento estático carculado de rozamiento delembrague;
r(¿rn : coef iciente dinámico.En el momento que. carga la transmisión al acoplarse brusca-
T._1t. el embrague ,influye-la rigidez torsionar de lá transmisión;cllanto mayor es ésta, tanto mayor puede ser el par motor diná-mico que carga la transmisión.
t, itr+8Adr, :
-. En general, el ac.opramiento suaae der embrag¿¿e es un medio:f,icaz para reducir la carga dinámica de la tra'ni*üor;'a raiz
t60 361

tal núrmero de ciclos de cargaicame¡te no influyJ o infir,]ée de fatiga. para'probetas de
107.
a la fatíga de la pieza con una, la tenslón máxima que- pueaeal alcanzar el número, Jado deencional de fattga o tím¡te de
ti-ga ha.sta el p-unto correspon-A/". ¡, tiene la'forma iiguiente:
Qf N .. ¡: A: const, (lg4);iendo
, Q¡ : carga del cíclo;,tvc. i: número de ciclos hasta la rotura;
rde del material utilizado, de Iapieza y de la tecnologir'a" s,
que además sobre la pieza,
Q2 siendo Ni, < Iy'cz el númeropieza con _esta caiga; en esterá aprovechada adic"ionaimente"ltoog¡'
-Basándose en Ia hipótesis cre ra suma de deterioros por
!iqu resulta, que la resístcncia de la:n-_te cualrdo. r ur¡rLErrura ue ra pleza se utiliza plena-
f*f*-,
fueron los. cojinetes de contacto rodante. Examinemos la aplica-ción de este método.para los cojinetes de contacto rodante que semontan en transmisiones de traótores y ar_rtomóviles.
(ttt(((((((i(tttIttt((tt(tttt(Itt/t
(.
Para los cojinetes de ccntacto rodánte radiales y radioaxiales,rrrLr!§ uq LwrrrdLLU I uuarrLe I autatcs y raoloaxlala causa de la destrucción de los cuales son las tenslones de ctacto que.se.originan en el .lugar de rozamiento de los cuerposde rodamiento por las bandas de rocladura, la ecuación de' lacurva de fatiga, por la que debe realizarse la elección de loscojinetes se da en la siguiente forma:
Q@h)o'3: C,
con-
(1e5)
de la longevidad del
en el primer régímen que
El primer grupo cleroducido el cálculo
2
clementos de máquinas para Ios cuales fuede resistcncia a' ta iriigr' 'fjárg*i¿i.il,
La relación ! caracteriza la parteh'1
cojinete que se utiliza durante el trabajoana lizamos.
Ya que durantc el trabajo cn todos los reg.menes preestable-cidos z, cl. pcríoclo dc serviiio posible cel cojiñete clebd sei apro-vechado plenamente, entonces es válida la igualdad:
¡+i+. +fi:t.. Adoptando en.esta ecuación h1 : d.¡ll, hr: ry¿h..., siendo l¿la longevicla d ca lcLrlada del cojinete , y ./_r, q.z . . . las partes de
363

cada régimen por separado en. l.a carga total del tractor, trans-tormamos la ecuación'anterior del siguñnte modo:
* L-):' ( I 95a)
seguidamente tomamos una Irecuencia de rotación a¡bitrarian,\., r.p..m., e introducimos las designaciones siguientes: - -'
:Fri +:0:; ... fi:9,,
que para el cálculo de la resistencia a la fatiga no tiene impor-táncia la sucesión con que se alternan Ias amplitudes de Ias car-gas. Tengamos, por ejemplo, que en calidad de iniormación pri-ñraria se han obtenido los oscilogramas de los pares motor queactúan en Ios semiejes motrices deI automóvil. Para registrar eloscilograma fueron realizados Ios ensayos del automóvil en unsector del camino de suficiente longitud para obtener datos expe-rimentales representativos. La elal¡oración de los datos estadísti-cos se realiza de la forma siguiente. En los oscilogramas se midenuna serie de valores de la magnitud que se determina y luegose agrupan por clases, que dividen toda [a gama de cargas enintervalos íguales, después de lo cuaI se confecciona el histo-grama representado en la fig. 143.En el eje de abscisas del histogramatrazamos Ias cargas (en nuestrocaso los momentos de torsión M^que actúan en los semiejes) y en cleje de ordenadas las Irecuenclas delas cargas X{6, o sea, la relaciónentre las cantidades de ellas queentran en cada clase y el número tc- 5i*;,li,i;#,'ál'*:'.*i,r' .::;:3tal de mediciones de la selección es- tmomentoq rte lnrqión\
'(t * E*
tltnx
t^, _ C'olt ,, C"l,P/'P|-¡ rt):in4-
Introducieltdo los valores obtenidos de ni, hición (195a), tenemos:
entonces
n*h (a,F,Q'i/, * orprQi/,* . . * o,Fre,)t,)
de donde, introduciendo el concepto de cargaobtenemos:
en la ecua-
equivalente Q.n,
(le6)donde
Quq:(n*h)o's:¿,ta ls
Q"q:
de distribución de las cargas(momentos de torsión).
cogida. Obtenemos una figura esca-lonada que representa la Iey diferencial de distribución de lascargas. A medida que disminuye el valor de los intervalos decada clase, el carácter discreto de la distribución de las cargaspaulatinamente se aproxima a una distribución de tipo continuo.A fin de cuentas el histograma escalonado se sustituye por lacurva de distribución, representada en la fig. 143 con una líneagruesa.
El siguiente problema consiste en la sustitución de los mo-mentos de diverso valor, que cargan \a pieza que se calcula, porun momento equivalente, bajo la acción del cual la pieza podriaresistir sin destruirse la misma cantidad de ciclos de carga, quepuede resistir al cargarse con momentos alternativos reales. Deforma análoga a lo anterior, el valor del momento de torsión equi-valente puede ser expresado de la forma general siguiente:
,{f "q
arlvlTt' * urM{t' *siendo IvI L, lvl2 . : valores medios de los rnomentos en cada
clase, y dt, &2. . , su parte (su frecuencia derepetición) en la selección total;
n¿: exponente de la curva de fatiga;s:rnagnltud que depende del tipo de deiorma-
ción y que caracteriza la relación entre lascargas clue actúan en la pieza y las tensionesque se originan en ella.
j.1365

cojinetes de contacto rodante ra-iben tensiones a;'".;;;;.to, seárboles redondos ",*i).i,,,q,i._9ys:l,etc.
e torsión equivalente,a puede resistir hasta
(re7)ff": ff.. , (+)- ,
I il?, j' o i'i,,t,.J,,' i # .",r,
. :? r..1:?
r ei oscilograma el número cleI l<m .de i.coriidá, .!.po.iutesemiejes del automóvil.en las
' 3.'l ::T,t;;:u t.Í'" 3i i i m.e n s i o n es pr i n c i p a I e s
Y análisis emDrag'ue PrinciPalde las condiciones de su trabajo
Con suficiente aproximación se
Rs: 0,5 ((1
puede adoptar (fig. taa)
+ Rr).
de la superficie de rozamientovolante del motor; el radio
sqo
Fi*:,111. Esquema de un embrague deorscos de contacto permanente.
iro.: m{ n- l,siendo rn: número de
conductores¿: número de
conducidos.
una presión específica ientonces
v, en el del funcioná-
de fricción.
Q: q2nPo6,
siendo 6 : Rr - Rz la anchuraoe. las superficies de roza-mrento.
^ Su.stituyendo este valor deq en la ecuación (lgg), obtene-n10s
trf".b. "rr
: ¡r,q2nR2obiror. (lgga)
. lluchos factores influyen enel coeliciente de rozamiénto rr
discosvdiscos
((((t(tttttttttttC
teC,,1
3
II3
, Si se supone que el esfue¡zooe apnete e actúa uniforme_mente sobre toda la superficiede rozamiento de los disó., cán
igual g,
M"mb. "ot: triQRoiro., (reB)
:ndo Q: esfuerzo dR¡: raclio mo¿;i 3l?9:-:l:.1ctúa en los discos;.R¡: radio medío itu -ráriit,n": nllmprñ do -^-^^ ¡^I\[,
- ¡ crruu rueolo dc rozanliento:.o.: número de pares d";;;;;ir : coef iciente áe .oru.iéniJ á;;j.:j"l
tuperficies de rozamíiento;
ef ici ent e ¿e reióivá' ¿;l ñ;;;;¿;i";; rlñ:u1, :l :S';^ 1r^:lo_ :t,,r g recom i en d a n 1", i.?13;., siguientes del
-v,. crr el proceso del funciona_
Íl:l*i".o.l-.T^b^r:-s,1.: j¡te, ¡yéae ,variar. en límites bastante consi-¿.., ¡ r . i á r; ;;. ;"d. ;.;,' i .' ii' i,'. I I: iái: ?t, l'-Ttiva de resbalamientol,:. l?n
"
d i s co s, J":1, :,: I :9: ^ i .l; ¿
"ü. i, t,i. j " iJ i ;." fi?? i i.t .,J :
[l:: : :, _ :j: i " ryji., 11,","í t., ; i'.,;i i. i .;i. "'o J
" ;, ; ; |1: :i] iá i,1:T i lll^. B.: ::=.,'t f , i I p ;; ; tj, i, " * i i;' :,;' i;, ; ; o ¿ :r1 I'Tl' I l,#i. rlm i e nío E ; I ; ;'
^
;; i ;i, r á! 1l T i á1, :'; ij:" ; ih';;, ilJ"',T' i,: i. 4* _
g:. ; o,-u *i.'ni á' ".2
r i' oi i lil 1". it i "# f; :,1 : I ::, i, I X:, ; I .; l": ::su perficies
Para tractorcs p - trle''l'
""r---¡1, :2,0 -:- 3,0;
para carniones fl: tr# : 1,8 - 2,5.
Para los automóviles de turisnlo el coeficiente de reserva de,,i[?.uur.,
generalment. "i"rr^irirto'L.no. que para ios ca-
3
IlIl3
IJ
367

(l
tü
0
til
ahogue.
368
Determinemos el valor del trabajo de rozamiento del embra'r en las condiciones indicadas. durante el orimer oerÍodo degue en las c-ondiciones indicadas, el primer perÍodo de
áceleración del conjunto tractor. Para excluir la influencia en
miento del embrague. Durante un período elemental de tiempo dlal embrague se le-transmite del cigüeñal del motor el trabajo ele-mental:
dL^: rtÍ"^6. .¡a^ d't,
siendo rD. - v¿le¡ corriente de la velocidad angular del cigüeñal.Durante dicho período elemental de tiempo dt el embrague
consume para el accionamiento del árbol primario de Ia transmi-sión el trabajo elemental
dL" - Mu^b. .rta" dt,
oc: valor corriente correspondiente de la velocidad an-gular del árbol primario de la transmisión.
diferencia de los trabajos
dL: d.L^ - dLr: rlf"*5. c,t(0t,. - or) dt
representa el trabajo elemental de rozamiento del embrague defricción.
Designernos por 11 la duración del primer período de acelera-ción para 1a condición admitida de que, al linal de este perÍoclo,la velocidad angular del cigüeñal se redLrcirá hasta el valoromn,rn. Durante el tiempo tr 9l embrague realizará un trabajo de
rozamiento:
0
rl
IIIo
ú
ú
rt
ú
0
ú
tt
,j
(,
siendo
La
ii
L: M"^t.",r t
(o:* - ri,r) dt0
tt*$
at
El valor de la integral que entra en esta ecuación se repre-senta en forma gráfica por la superficie del triángulo sombreado
del motor y de 0 á o**ín para el árbol primario de la transmisión;la altura del triángulo corresponde a la duración rr del períodode aceleración exañrinado; la superficie del triángulo es igual a
369

+ Para simplificar, se ha admitido que Ia ley dede las velocidades angulares.del cigüeñal del motor yprimario de la transmif ión es lineaL.'--'
Determinando de esta manera el valor de laanterior ecuación, tenemos
Por fin, introduciendo en la iórmula (199) la expresión de 11
obtenida, determinamos el trabajo de resbalamiento I del embra-gue para la condición de cálculo adoptada:
Cj
tt-t3t-tteteIrt
Q
ItftLfIL
tIq
L
tL
fe
tItt
va ria ción
del árbol
integral en la , Memb. calox,:-2
(199a)
consecuencia de Ia
causa de Ia insufi-de redondeada del
El valor de r¡ puede serpara la duración del primer
obtenido de la fórmula general (64)perÍodo de aceleración, sfse i*tiirvé
(lee)La evaluación comparativa de diierentes embragues se lleva
a cabo por el trabajo específico de resbalamiento Lo"n cuya magni-tud
.LLesp
- -E-- ,'oroz
(200)
Fig 145. Gráfica para el cácuro del trabajo de resbalamiento der embrague.
A su vez el valor o. (+)'puede ser derinicro de ra ecuación
1) de la fórmula (6b)
siendo F : área de un par de superf icies de Iricción del embra-. By.;i,o,: número de pares de superficies de fricción.
Los valores permitidos de 1.., { 6 kgf .m/cm2.Una gran influencia en el período de servicio del embrague
ejerce la frecuencia de su acoplamiento. Si marchando el auto-móvil por buenas carreteras fuera de la ciudad por 100 km derecorrido r-ecae generalmente no más de 20-50 desembragues,con un tráfico urbano intenso para el mismo recorrido el embra-gue se debe desacoplar varios cientos de veces. Ultimamente,también se ha elevado considerablemente la frecuencia de desaco-plamiento del ernbrague en los tractores, a causa del aumento delnúmero de marchas y la manipulación con ellas, la utilización
muelles de presión.
§ 4. Cálculo de las piezas principales de las cajasde cambio de marchas
Las-principales piezas de las cajas de cambio, que determinansu..período de servicio, son los engranajes, los-árboles y loscoj inetes.
Los engranajes de las cajas de cambio de marchas de lostractores y automóv ropean principalmente acausa del deterioro tipos piincipáles de de-terioros de los dient son los siguientes:
desgasie de los do de la airasión de lasuperficie de trabajo;
roturas en las superficies de trabajo aacción de las altas tensiones de contacto.
roturas de los ai.ni.. piin.,prf*.nt. ,ciente resistencia a la fatiga en la zona
de donde
2) de la fórmuta (64)
T, :......- lmor -,lra¡¡(rD-l)''-rr"@-ffit70
37 t,

pie del diente, clonde se originan concentraciones locales de ten-slon;_ destrucción y aboiladura de la cara cie ros clientes al engranarla transmisión.-
Los datos. generales acerca de la elección de los parámetrosgeométricos de los dientes y los métodos de cálculo d'e la resis-tencia y solidez a. las tensiones de flexión y de contacto, se danen los cursos de elementos de máquinas y mánuales para'.1 cál.u-lo de las transmisiones mecánicas.'
Para calcular los engranajes cilíndricos de dienles rectos delas transmisiones de traótores fue elaborado un ,,¿to¿o ñórmali-zado para [a rama de la indLrstria, el cual se basa en la conocidafórmLrla de Len,is, ampliamente utilizada en la construcción clemaquinaria general, pero transformada conforme a las condicionesadicionales siguientes.
1.. La precisión de maquinado cle los engranajes en las fábri-cas de.tractores y. automóviles _asegura que-se hatten engranadossimultáneamente dos-pares de dientis, por eilo se admite-qr" puruobtener L)na zona suficiente de engrane de dos pares de'dienteséstos deben tener una altura normáI, es decir, qrie /a suma d,e laaltura de la cabeza g la altura de trabaio ael pte del diente seaigual para ellos a dos módLLlos.
2. Desde el punto de vista de la resistencia del diente el máspeligroso es eL momento de paso del engratle de dos pares dedientes a un par.de ellos, o sea, cuando laiarga se transmite sólopor. un par-de dientes, a diferencia del períoáo anterior, cuandose transmitía simultáneamente por dos pares de dientes.
3. En el sector de transición-r el perfii del diente al círculo depie.s,e origina una concentración de-tensión local, que reduce laresistencia del diente.
4. El esIuerzo de flexión en la sección débil del diente debeser menor a su límitc de fatiga, para que el diente resista sinromperse cualquier_cantidad de ciclós de carga.
En las cajas de cambio de automóviles, los engranaies ci-lindricos de dientes rectos principalmente se ,iirizan "en lai mar-chas.que trabajan relativamente poco (primera marcha, marchaatrás);. en las ma.rchas restantes general'mente se utirizan engra-najes de dientes oblicuos.
Para el cálculo de los dientes obricuos también puede seraplicada la fórmula de I ervis, a condición de que en ellá se intro-duzcan enmiendas que tengan en cuenta la cóncentración de lastensio¡es,. el grado de recubrimiento del engrane, el rozamientosuperficial, etc. De acu,erdo con lo expuesto, Ia fórmLrla empleadaen la industria automóvil para cleterminar el esfuerzo de flexiónen la sección de cálculo del diente del engranaje cle clientes obli-cuos, tiene la siguiente forma:
En esta fórmula, P: esfuerzo circular que actúa en el diente,b:lar.g1tr.a del diente, nto: su módulo riormal, y: factor deforma del diente.
El valor del esiuerzo circular
o - trfto,
' - o,5mrz'
siendo Mb,: momento de torsión transmitido por el engrana je;rñ.: ¡nd'6rlo f rontal;z: número de dientes del engranaje.
illódulo normal del engranaje de dieñtes oblicuos
mn- rnrcos8.,
siendo F : ángulo de inclinación del diente al eje de rotación enel cono primitivo.
Al determinar el factor de forma del diente y para el engra-naje de dientes oblicuos se debe partir del númeio reducido dedientes del engranaje equivalente que la sustituye, teniendo encuenta que
,."q - icsTF- . (202)
t
ú,
!i
41
.h
El valor del factor de forma del diente y se da en diversaspublicaciones para el cálculo de transmisiones mecánicas.
con un 0,30/¡ de carbono, aproximadamente [40X (40J), 40XH]t(40JNM), 35XfT (35JGT) y otrosl y son expuestos a cianuracíóno templado en corriente de alta f recuencia.
Al calcular los dientes de los engranajes en cajas de cambiode marchas de tractores por Ia fórmula normalizada, se reco-mienda adoptar el esfuerzo de flexión admisible [o¡] ::3000 kgf/cm2, en este caso en calidad de momento iniciai decálculo se toma el par motor nominal del motor. En los engra-najes de dientes oblicuos cle las cajas de cambio de aLrtomóviles.el esfuerzo de f lexión admisible según la fórmLrla (201) se hallaen los límites de 1500-2500 kgf/cm2 para los camiones y 1800-
orr: Or24 #* ,
372
(20 r)
a'7 ')

374
perfil 4gl diente de. cíerto engranaje reducido, que se obtienedesarrollando en el plano del cono adicional.
El número de dientes reducido de la transmisión cónica de
dientes rectos es igual: para el engranaje motriz ,í:*u, para
el engranaje conducidc ,;: #, sienclo zt y zz los números
reales de dIentes correspondientemente de Ios engranajes motrizy conducido de la transmisión cónica que se analiza; ó es la mitaddel ángulo en el vértice del cono primitivo del engranaje motriz;fo A: zl
.2Los esfuerzos de flexión admisibles para los dientes de los
engranajes cónicos de la transmisión central de tractores ó¡:: 2500 + 3000 kgf/cm2.En la mayoría de los casos los árboles de las cajas de cambio
de marchas trabajan a torsión y fle.xión; su cálculo se reallza conIos métodos comLrnes de resistencia de materiales según el mo-mento ¡esultante. Su valor se debe cieterminar para todas lasmarchas y para el cálculo se toma su valor máximo. En los árbo-les de las cajas de cambio las tensiones son relatlvamente pe-queñas; generalmente los diámetros de los árboles no se tomanpor consideraciones de solidez, sino partiendo de los diimetrosde los cojinetes requeridos. Una gran influencia en el período cieservicio y el luncionamiento silencioso de los engranaj es y coj ine-tes de las cajas de cambio de marchas lo ejerce la rigidez de losárboles, puesto que las flexiones de los árboles y su pandeo per-turban el engrane correcto de los dientes y el contacto normal delos elementos de trabajo de los cojinetes. Las ilexiones de losárboles y los ángulos de torsión de sus ejes se calculan por lasfórmulas de resistencia de materiales. La divei'gencia de los árbo-les, o sea, su flexión total en el plano de disposición de los ejesde los engranajes conjugados no debe ser ma)'or de 0,2 mm alcalcularse por el par motor máximo (en el tractor por el nominal)del motor. Los ángLrlos de torsión del árbol en los apoyos nodeben exceder de 0,005 radianes al utilizarse cojinetes radialesde bolas, 0,0025 radianes con cojinetes de rodillos cilíndricos y0,0016 radianes con cojinetes de rodillos cónicos.
Las uniones por estrías se calculan por cortadura. Los esfucr-zos de la deformación oo.r, kgf/cm2, en las uniones por estrías dclos engranajes con los árboles pueden ser calculados por la fór-mula siguiente:
2,1les t(203)
transmitido por la
o.luf : \'"rt d--.zF'
((-
((
t
IIl
I
siendo ll"rt-momentounión por
de cálculo de torsiónestrías, kgf/cm;
(L(
(
(((((((I(
((I(
87ú

desr: diámetro medio de Ia unión por estrías, cmiz: número de estrías; § 5. Cálculo de los puentes motrices traseros
ticul a ri da des.
d -..siendo =iL: relación
u "ng
Y".t:5áL(si* o,s)+ r,
del diámetro medio de la unión por es-
al diámetro primitivo Dnn* del engranaje;del valor e de desplazameinto del centro
e
T
trias d..¿
: relación
376
Fig. 146. Esquema del puente motriz posterior de un tractor de ruedas'
Al arar, el tractor marcha con inclinación transversal; susruedas derechas van por el fondo del surco creado durante el paso-anterior y las izquieidas, por el campo sin labrar; en este casoa consecúencia de la desigiraldact de resbalamiento de las ruedas
satélites de1 dilerencial giran en sus ejes con pe-
idades angulares, pero con gran carga. Lo mismoambién ai-labrar p-endientes ya que para evitar lauelo ello se realiza, como regla, marchando los con-
iuntos del tractor en sentido transversal a las pendientes.- El empleo del bloqueo del diierencial viola la distribución re-
lativan-rente uniforme del momento de impulsión entre las rueclas,que tiene lugar en la es de marcha rectilínea;en estos casós el eng semiejes del diierencialy los dientes de los tlgan con él pueden re-óultar sobrecargados 1as piezas análogas dis'puestas en el otro extremo de1 diferencial.' Por fin, al ir por curvas abruptas, para lo que en el tractorse prevé 1a posibilidad cle frenai el 1ádo retrasado del pue.nte
traser-o (con 'los Irenos 6 mostraclos en 1a f ig. 146), los satélites
!J 3ax.5a9 377
del diferencíar siran airededor de sus ejes con erevadas verocida.des angurares, "harán¿"i.-.ñi"ri.i".n'ru ,n;y;;i;'iJ'ro, cases,
::fl:?11,.ffi::e en condi.i;,;'áli;;ir., ¿. viraje, bajo una carsa
,la .fiabilidad de funciona-on rrregular de Ias cargasuñamiento de los satéiñes
Cuando el diferenciul,.lo-_está bloqueado, eJ esfuerzo circunfe.rencial P' que recae en un par de die'ntes conjugados der satéritey el engraná.¡e aet semieje, f,ui'¿. árüi,i'r. un vator
o _ 0,6M¿,r' - 74-Y"
siendo /vl¿1¡: par motor calculado aplicado a la cajarenci a I ;
378
rs: rrúfflero de satélites del diferencial;Yr: coeficiente que tiene en cuenta la irregularidad de
distribución de la carga entre los satélites;' rs: radio medio del satélite.El par motor calculado M¿¡1 se determina cuando el tractor
los pares motor entre los semiejes se determina por las resisten-cias aplicadas a cada una de las ruedas motrices. El esfuerzo
En el esqllema que nos ofrece la fig. 146 del puente traserounas de las piezas mds cargadas son los semíeies del tractor.Ellos no sólo transmiten los pares motor a las ruedas motrices,sino también están expuestos a momentos de flexión, que se ori-ginan por las [uerzas que actúan en los engranajes de-las trans-misiones [inales y por las reacciones del suelo en las ruedas;estos semiejes se denominan no descargados.
Analicemos las cargas que actúan en los semiejes durantedos tipos característicos de trabajo del tractor: durante el aradog eL transporte.
Durante el arado la reacción vertical del suelo en la ruedanrotriz derecha, que va por el fondo del surco, es considerable-mente mayor que la reacción_ que actúa en la ¡ueda izquierda queva por el canrpo sin labrar. La correlación entre ellas én algunoscasos llega hasta 2: L
Partiendo de ello, admitimos para el cálculo del semieje, quedurante el arado (fig. la7) en la rueda motriz derecha / dél trác-tor actúa la reacción vertical del suelo:
I(II(
(
I(((
(((((
r(
t(
,(
\((
((
((
(204)
del diie.
I
t-
yi:+?u,Gx0,5G,
((

1¡
ürl
{lq
¡It
rh
$
: factor, qlle determina qué parte detical total que actúa e'n lás ruedasen la rueda derecha.
Pi*: o'6¿/inrP
I
l, '
siendo }fimp r:momento calculado de irnpLrlsión del tractor conla primera marcha (piinciial)
siendo lr: coeficiente..de carga de Ias ruedas trSseras; conformea las condiciones-de trabaijo examinadas adoptamosque l,¡ : 0,75.
l3 la reacción ver-motrices, recae
Fig. 147. Esqr-rema de
al semieje. De esta manera, una vez halladas las fuerzas y mo-mentos que flexionan el semieje y, conociendo la posición de loscoj inetes de apoyo A y B por los brazos a, b y c, determinamosdel modo usual las reacciones en los apoyos, que corresponden a
la dirección de las fuerzas actuantes: R¿ y Rl en el apoyo A,
RB y RL en el apoyo B. En lo sucesivo el cálculo del simieje a
la flexión y la torsión se realiza de la forma común.Con la segunda variante de cálculo de los semiejes se supone
que en los trabajos de transporte las ruedas se establecen parael ancho de vía máximo B,n¿*, en lugar del ancho de vía Br. quese utiliza durante el arado. Seguidamente, suponemos que el mo-vimiento transcurre por un camino horizontal y las reaccionesverticales del camino se distribuyen por igual entre las ruedasmotrices. Puesto que los momentos de impLrlsión del tractor a lasvelocidades de transporte son relativarnente pequeños, entonces elcálculo se realiza para el caso de frenado de emergencia deltractor, durante el que, desde eI punto de vista de la carga desus semiejes, es más intenso que el trabajo del tractor en elrégimen de tracción. Como resultado de la acción en la ruedade la reacción vertical del camino y la fuerza de i¡enado tangen-cial a la rueda se origina la fuerza resultante que flexiona elsemieje, cuya magnitudP,,:Vmsiendo Yt.t¡:reacción vertical del camino en las ruedas motri-
ces durante el frenado;Pr.*r*:0,5 (pYr. rr que es la fuerza máxima de frenado que
puede ser obtenida en la rueda con un coeficientede adherencia con el camino^igual a g.
EI momento de flexión máximo surge en el cojinete externo B,donde comienzan las estrías, labradas en'el extremo saliente delsemieje para el cubo de la rueda.
Además del momento flector, en el semieje actúa el momentode torsión Mbr: Prrrá*rr.
Aparte del calculo de la resistencia compleja de los momentosde flerión y torsión, también debe ser verificada la rigidez a latorsión del semieje; el ángulo de torsión no debe exceder de0,01 radianes.
Al situar las transmisiones finales en com.partimientos latera-les individuales, dispuestos directamente junto a las ruedas, comose hace en algunos tractores cultivaciores de tipo universal, lossemiejes tienen una largura reducida y, por ello, las tensionesde flexión qLre se originan en ellos son peqneñas. Los esfuerzosflectores son percibidos por los cuerpos de las transmisiones la-terales y las mangas que los unen con el cárter principal de latransmisión.
En 1a fig. l48 se muestra el esquema del puente trasero motriz
lts. fuL'rzas que acturn cn Ios st,rnieiesdcl tractol dur¡nte el ararlo
no descargados
El semieje tambiénactúan en el engranajedetermina partiendo del
es flcxionado cor las fuerzas p y p,., que2 de la transmisión ltnat, cuyo r.alor semomento de impulsiór /4impr iransmitido
s80
381

I cono, disminuyendo las holgusi el engranaje motriz gira enla espiral, la fuerza axia-l en élo, aumentando las holguras en
ciente la seguridanuclon, oe ras.holgura-s- es jndeseible, puesto que al ser insufi-ciente la seguridad de fiiación axial del inoraneii nrredp ñr^r¡^^.rfijación axial dei éngrana¡i, puede provocarel acuñamiento de r ello, .n"1rc tiáir§ri.iá,iá, p.in-cipales de los auto graná¡es motrices cón¡coi-tienenuna dirección de ésta át sentido de su rotacióndurante la marcha articular, en las cajas de óambio
Fig. r48. Esquema der puenre T:,T¿írlfÍ:ii?:
o. un ca¡nión con t¡ansmisión
z o al aparecer holguras consi-das.
;ii;"*t"xff,F,Jfri:ii:t382
Fig. 119. Esquerna del puente posterior de un tractor de oruga con embraguesde giro.
de la espiral en los engranajes motrices.En el oar cilíndrico de la f rqnqmiqiÁEn e1.par ci.líndrico de la transmisión principal Ios ángulos deinación de los dientes deben s:r elegidos de tal modo"oue lasinclinación de los dientes deben s:r elegiáos de tal modo"que ras
fuerzas axiales, que surgen durante su Tuncioná*iénio eÁté-n diri-
(.
(-
((((((((
(
(
(
(
IL_
383

Fig. 150. Esquema del .puente posterior de un tractor de oruga con mecanismode giro planetarlo de un escalón.
384
adherencia de la oruga. Además, en el momento calculado de losembragues de giro debe ser introducirio un coeficiente de reservasuficiente, puesto que siendo grande la cantidad de discos delembrague, su desgaste total en el proceso de explotación puedereducir considerablemente el esluerzo de los resortes de presióny, como consecuencia, disminuir el momento de rozamiento delémbrague. Para los momentos calculados de rozamiento de losembragues de giro citados, su coeficiente de reserva se adoptaen los límites 0: 1,5 +2,0. En los discos se admite una pre-sión especíiica q :2,5 -:3,0 kglicm2. En lo restante el cálculode los embragues de giro no se diferencia del de los embraguesprincipales de contacto permanente.
En el esquema del pr"rente trasero del tractor de la fig. 149, eleje 4 de las ruedas motrices está fijacio rígidamente y por consi-guiente está descargado de los momentos de torsión; dicho ejeflexiona bajo los esfuerzos que se le transmiten a través delcubo 5 desde eI engranaje conducido de la transmisión Iinal ydesde la rueda 6 de la oruga.
En la fig. 150 está dado e[ esquema del puente trasero de untractor en el cual en calidad de mecanismos de giro se utilizant¡ansmisiones planetarias de un escalón 1, cuyo esquema fue ana-lizado anteriormente al estudiar la teoría de giro de los tractoresde oruga.
El mornento M"o, que se transmite durante el giro estable porel engranaje de corona del mecanismo planetario, dispuesto enel lado adelantado del tractor, tiene con la primera marcha prin-cipal, con pleno aprovechamiento del par motor nominal ltln delmotor, los siguientes valores (despreciamos las pérdidas en lastransmisiones):
JvI"o, --- Mnf "¡i ""n,
siendo icr: relación de reducción de la caja con la primera mar-cha principal;
/"un: relación de reducción de la transmisíón central.En este caso el momento que se transmite con la brida de
arrastre 3 al eje adelantado 4,
Mnr: lVl"oripl,
siendo fp1: relación de ieducción del reductor planetario delmecauismo de giro.
Es imprescindible asegurar la obtención de un momento defrenado lUrr. pl en el freno 2 del mecanismo planetario, que seacapaz de mantener inmóvil el engranaje central. Para ello es ne-cesarro que
M¡r. p¡: P2¡r1,
siendo P:r : esfLterzo circunferencial total creado por todos lossatélites en el engranaje central de freno;
l§-
385

p2, -
M"o,
siendo 13: radio del crículo 0.,r,,,"" dc lao ,¡..^_rnaje de corofla, obtenemos: de los dientes del engra-
Mrr, or: P»tf t: P>¡f r : hI"o, !J_ .
En el bulón más carsadn rfar ^^r:, ., '"
:gado del satélite actúa el esfuerzo
4) ro, * ro,: 0,5nt(2, * zr);
najes;de losnte. engranajes motriz y con-
ermite obtener .el perfil deseadonte su -tallado.lá lir,.á..m".Liu ¿.ivo Io más racionriÁ.1_,tt, po.iolumotriz y conducidá.
9ngranajes de Ias transmisio-et métodó u..iU"ln¿l.-u-áo prru
,il_y1.nres. rectos. La tensión de::I1"1 admisibte para los-enlg:?liig. motricei es SB00ÁBlicm',. para los engranaiesconducidos, aS00 kgf/cm? O;¿;;momento de cálcuÉ se tom, elmomento de torsión, que puedetransmitir la transmisi'¿, J¿n1.",a, la. oruga adelantada A;;;;;.er grro.
(205)
I
(t(l(lrl
tL
EJEMPLOS DE C.ALCULO
li:11tlr-,.,a. requiere dete¡mina¡l,: ::f:i:,.; ;.- ;.i,,JJii; ;:,::,JlÍf,ryor,^..9 l,..lla, está. ..prárJn ii¿o"' áill:" j, :.0::^j: ürl.jál'¿.".' i'ü,ll,fi,,,l Fig.,l5l. Esquenra de unaoro oe marchas planetaria11
r;g l:,1 r"=:q"i'iE,,,:;i,.;:caja de cam-de un t¡ac-
i; "il" "!):,_.2, áiu"r i: .,J;iidT tor.La caja ..jnitu -
¿. táI' ue sarrda.
;1s1,.,!,t.-i.ñilr, i,,"?táfi|:'j"oll':jX,jÍj:,Iud^, _1na de .ras cuares tiene erengranaje central, to. .atéiitel i.i'tlÉlJÍi;i:odo"' ^ll:__d. ,las. cuates tiene el:t-ttt9: engranajes están oesrsnarJos o. or:"^..1!9'o,,; el.núme¡o de-dientüi:,',''::,'1ru*'JT;;. jr;;;,ii:,s'-,1i":'.*i'i,'i',of#:':pritnetarra f ns ata-^^r^^lndlce superior, que 'indicanem_a^_respectivamente ioi .,, ,,torcan.el número de'la serieL^1r^.:9.n signos en et Ín¿ii§'.",i"?rill t:i ¿ tit,lt ili,..f,. i ¿i *-ny¿l' ír jli ltfl :i', i . *l I *: i.;], J,,,.., jenrbragues ¿e ¡ricclán'ljir
uc rrrrlroo son dosrqueables M¡ lllz y lts.
387

Marcha s
E Iemen tos demando aco-p lados
lúsT z hltT2
,fl
r!,I
/l
I0,f,lrf
r0
oort000
eseuá n-ldea ne-
s22
fa rá
Datos iniciales: Ia caja permite obtener cinco escalones de marcha adelantey uno de marcha.atrás, acoplando. a pares diferentes elementos ¿e manAo, eñlas siguientes combinacionesi
- PT, obtener Ia segunda marcha se acopla el embrague Il2 y se aprieta elfreno rr. De este modo los ejes. de los satólites de ambas"series-piunet.iias que-dan inmóviles,. la.caja.plan-etaria se convierte en una caja común de dás pares,con una relación de reducción
, ,'3 z'{'"'- 1' ,i'
, Al acoplarse el embrague..[13 y .ap.retarse el f reno r¡ Ia primera serie pla-netaria funciona según la variantc 1.'indicada en la tabla /,'r. li i.s;n¿, ..bloquea con la primera. conro resultalo, la relación de reducción dÉ la caiacon la tercera marcha
,' -L t'
'"' : -' '-''t
"l
Acoplando el embrague ll12 y apretando el ireno ?1, se obtiene la cuartamarcha. En este caso la primera serie planetaria ILrncioná'^segrin la viriante i yla,scgrlnda serie según la variante J,'indicadas en la tabla'1. La ielacion dereducción con la cuarta marcha
tttll
.. -
o: '
o3 _ 'J
zt z,tz¡
.Para la quinla marcha el _embrague If1 bloquea la primera serie planetariay el embrague. M2. la ¡eSu,ndg, Todos ,los,engianajes'dc anrbas ..ii., giián
corno un todo único y, la relación de reducción de ta-caja con la quinta mírcha,-s: I.
388
Si se acopla el embrague ,&l¡ y se aprieta el freno 72, la prime-ra- se.rie. p.la-
,"trr]r"5-g Uf"i*i v la se"guirda'sárie iunciona según la-variante 5.cle la tabla
i,';;;"-;.;;1['iJo É. obteñdrá la marcha atrás cón una relación de reducción
' z:!
'c (m. at) - "','
'
Para ooner la caia rle cambio de marchas en la posición neutral es necesa-
,io i.Jri áp;.i;d¿ el'ireno T¡, desacoplando todos los elementos de mando res'
tantes.'-"- Eiemolo 2. se requiere determinar el valor del trabajo especí[ico de. resba-
tamierito 'en el embrague principal de un disco de un. tractor de ruedas al atran';'.;"1 uá¡iosr" principal de un disco de un tracior dé ruedas al arran'
t-i.láo ¿.t .epo"so en las'condiciones más pesadas para e.l embrague'car Dartlgnoo oet repusu cll td> lulrurururrsr rrLaJ PvJquor :"'Y'*q-"'''nái"i'iñi.iái..,'*o*.nto de inercia de las inasas en movimiento del motor
0,5.2,5. t902.0,16 (2 - 1) 4 2400 kgf .m.2 (2,5 - t)
o' / o//\icr:r*11t.?) E1 trabajo específ ico de resbalamiento lo hatlamos por la fórmula (200):
, - L ::l!B = 8,2 kgr .m/cm2."es Firo, 230. 1
El valor de Ln" obteni tes admisibles'Eiemplo B. Si-require ara dete.rmina¡ las reacciones de
.n fo"t'áp6,or 'los
árbbles de marihas de un automóvil; la
caia es de tres árboles, con- Datos iniciales: en la
ireccionesranaje en
§i.J;,?;fiapoyos .4
il1,'.',,f 's',J,'f;;'ü^13',;';á!'i1'§'.§xi¿1.{
El árbol intermedio se une al:- naies 2 que están PermanentemcB. fuérzas de igual vhlor Pero en
' reaccioneJ en los aPoYos C Y Dniendo en cuenta las fuerzas que a
'temente 2 Y el engranaje / que estla posición de los engranajes én el
389

R,(s)
Distri buci ón delrecorri do pordiIerentes ca-minos al tra-bajar en elcampo, o/s
Idem., al traba-jar en la zo-
ót :5
TI:O
Sr:6000
Yfl:20
Str:36 000
YItI : 40
SII¡ : l2o ooo
ótv : I5
Yrv -- 4o
Stv : I80 000
ótt:50 óttl :30
((((t(ttttttC
C
C
aGcrJ'
,3
Fig I52 "',.?,x.,fl:,]f
:ff:i#!:!f,.#J,T á:.:t?J;::il.,os apoyos «,e,oste salida; á_l¡¡ter¡uedio; c_de entrada.
na subu¡banaPeriodos de
servicio par-ciales de lossemiejes en
cada uno delos caminos,km
,r"'l
i:I
Nrimero del camlnoDatos lnfclales
de donde
Basándose en la hipótesis de la suma de los deterioros por fatiga es po-sible escribir, que el período de servicio total cle Ios semiejes al utflizarse'elcamión en el campo S¡¡ se determina con la siguiente ecuación:
órsr, órrs", órrrsr, órus:,---É---eT---F--i----¡-:.--,
"t "tt 'til UIV
lc0
Capítulo XIII
Cálculode los elementos PrinciPales
del tren de rodaje
y de los mecanismos de mando
§ l. Suspensión de los automóviles y de tractores" de ruedas; ruedas Y neumáticos
En el caso general 1a suspensión consta de tres.partes prin-
.ip ;i;.i1".-ár.,ié"io. elá sticos, los amorti gYldli:: 1: l::-:'^''i:;;i5;;;y ;i;i;p";iii* ¿. gtría; por medio-de cllos ai.91:'l: Í:]ciones v el dispositivo de gtlla; por Ineutu uc tjrru5 dr Lusrl
i,.li.rrá; l;;irt;ii.Á üt-ft.t,,t v momentos que actúan en Ias
I
I
I
I
100
100
C- or,ó,,,6,,,,ór,'q-r;-rE;-r;
En forma análoga al utilizarse en la zona suburbana el oeriodo de servi-cio de los semiejes
s>2100 :90 000 km
5J_50-30_156 000 ' 3(i 000 ' 120 000 ' 180 000
: 45 000 km,
\tvS,,
SE
deaprecia io considerable clLre puede ser la dlferencialos semiejes del camión en dependencia de las condi.
20 40 40_l_ _ _.!_ _
36000 ' 120000 ' 180000
Y,, "\",,3;+t + ;;;¡ ^;. En a I gunos irro. I as f unciones
.X.,1"' 1: rli::"1 i',lT rÍ,:.1,1estas longitudinales, ademáss de reducir los esfuerzos di-
I carnino sobre Ias masas amor'nsmitir al cuerPo todos los es-
tiguar las oscilaciones a cuentalal ballestas Y en sus articula-
c10nes.-'"'É; las suspensiones se instalan elementos elásticos con diver'
s^s óa.acterísiicas, o i"u, .on difer_ente dependencia entre la
i;;r;;;iü;á; ;i'elemento.Q v su deformación i Lo.s elementos
Lf ait."i'metálicos más empleaá, s son ias ballestas de hojas, re-
.tii!. .if i"áricos helicoidaiés, barras de tors.ión,r,'.otros, q-ue tienen
l"ii"irl'áiiiii¡stíca tipeaL o próxima a e1[a; el coeiiciente de rigidez
,. ."nr"iu^ en ellos aproiimadamente constante- para todos los
i,rf.r.. Í de iierión del' elemento. En Ia f ig.,153.1a característica
á;1rl;J elementos ástá representad¿ con la línea recta incli'
"á ¿. i. una va ried a cl de I a' ca r a cteríi!ic3,
r:ii:3' .:' of.'.'"llt,l',r1;a aclicional.ea quebrada sólo trabaja -la Prin-de
'la característica también co-
tlesta a'dicional Y, como resultadon aumenta Y su c
en el segundo secconjunto de la bastribLr¡'e entre ella
mente a la rigidez de cada una'
Del ejemplo dadodel período de serviciociones de explotación.
I
I
I
.,
).)
'l
'l0
,l
I393

chas variantes de características
el_elemento elástico susnclden; el coeficiente déet lazo de histéresis. En las articulacionesiguales *. ,u biela de
de unión sobre la ballesta actúan fuerzassuspensión crea en la ballesta una carga
(((((((((ttttttJ,trl'
rJ
,?
fo
1o
(,]I(,j
0
adicior:al en forma de la componente lateral X:+ para
I=ig [54. Esquema de una simétrica.
FiS.tSS. Ca¡acterística de los element</_rinear; z_escaronada; ,_." ,,,",.,...";;::,;Trj::: ,1".",1.r.:::1,:I:u",
494
ina su flecha de flexión f ymaestra donde ésta tiene suflecha I, crTl, de la ballestaa fig. 154, se calcula por la
r.Pl3(207)
s i e n d o P : c a r g a.t o t, r, o rr r/. i toT
*_--. i r, u * r,E: módulo de elasticidad d; !rim., orden (2,1.t08kgf/cm2);/o: rll.rrlofrto de inercia de todas las hojas en la secciónmedia de la ballesta, cma;l:brazo de cálculo de l'a baliesta, cm,
b a I lesta
-r,11

El coeficiente d que entra en esta de la estruc-tura y.disposición d'e,las tr.idas que e la ballesta,de la distancia entre las bridas que a la viga delrre, e tienür losesta están corta_a es mucho más cortao la scgunda hoja se
e.rtremos.de las hojas de la jrñ'a? áJri:'::;'?;dlsmrnuclon simultánea der es or de las hoj as por ros extremos,la ballesta es más f lexible y coeficiente' o'i".p".tivamenteaumenta.
El momento de inercia de todas ras hojas de la balresta en lasección media
Io:* (n,n? * nzhS* . . . +,r-h'^),siendo /zr: flúmero de hojas de ár de espesor;
. ruz: número de hojas de l¿z de espesor, etc.La tensión de flexión
-en ia hó.¡a máestra de la bailesta
o,,: Y: #: kgr/cm?, (2oB)
slendo lV : Io: E A momento calculaclo cle resistencia;l¡m: espesor de la hoj a maestra.
Introduciendo el varor de 1o de la ecuación (207), obtenemos
or,: l#h kgf/cm2. (2oaa)
. !.q.. h9j_aq-d9 ballestas se fabrican principalmente de acerosal silicio [55C2 (bss2) ó,999? (.6_qV)], ui ,rngonói"'tosl (65G)1.al silicio - manganeso [5sfc isscs)] y at c'romo l,rnngnn.ru
396
del tratamiento té¡mico.-- úno de los motivos de las roturas prematuras de las hoj as es
el rozamiento entre ellas. Para disminüir el rozantiento se utiliza
y'.-Fig. 155. Esquema de una suspensión de torsión.
la lubricación cle las superficies de las hojas con pasta de grafito
397
\a

:i"fl,j,:n",1L::pgy-"^iT:yil_v .] otro se urre ron una palanca alse fija en un aDovo inmóvíl y el otro se urte con una palanca alej e de I a rueda.' eh er
-eiq ue*; ;. l; "r,i':p.árioñ'á
Jffi .i;;:'r.,,".::Tii9: Bn^l?^
fig._ rb5, fa,u...¿a i-_"J;.,;;¡;rJiá,"iii.iilnte la
trJE uc ra rueoa. t,n el esqLrema de la suspensión _de tors,iOn,-r.pr"-sentado en la fig. 155, fa rueda- i-*;; srsnenrtirt e ma.ri.-l^ r^
: : I il.r", "r,u,,,
u., p]1,j 1
^
a " Io i, i á-n a d ; j ; i; "á';¿1; i i J ",X' XX,r.* j :aplicadas a la rueda lu uu.ir-ráiñiá,iá.
I t,rgl;:, o:,: :::":,.'_.^ T l"_Ti, ür er m omen t o torso r rlf 1o¡,
il v.?
"T.1 Í1,* 11 :: 9.J11 in a, p a rtien dá á.-i ;' .;;;;' q'.i.',.i aí"8illa rued.a que se amortiguá-y'ríliirr" in-' 'o rdrBa que actua en
la rueda de la nosición ininial ¡¡,^^A^,de-elevación requerida defi :: i,0,.,0." l,
^ t "^r::
j :^[. i n ict al,, c u a, ¿
"' I .
" r, j ; ";;' Jr.t], : l, g, a u
Í I ?::. ioÍ *..i ":,1 -. 1q^, 911i, ;gn.'r i 1,.;, á ; i ;. ; ; i:,i' [' i f1, i,1'"*',11
t::' ?j,^L.it en s ió n d^e tors ión d ; T; b."; ;' ;i wl, :^;i,ET Ll:?h,',i:por la fórmula:
, -
l6[to, -' nds
siendo d: diámetro de la barra, cm:_Mb, : momento torsor, kgf .cm.',El.ángulo de torsión de'la'ba;;; 0, rd, lo hallamos de Ia co-rrel ación:
o: Mp:lt, -32M¡o,lt,Ulp Gnda '
Mto,
@F' (20e)
(210)
(21l)
siendo /t.: largura de trabajo de la barra, cm;G : módulo- de elasiicidu¿ áuruit. iu torsión (g. tOskgf/cm2);
. nltlp:-ú:momento de inercia polar de la sección de la barra,cma.
Unlendo las dos ecuaciones anteriores obtenemos:
/t,:o #" .
Al elegir I ¡a barra de torsión se debe teneren cuenta demitidos, ; ,*, orslon no exceda los límites per-siendo 0ad,.: isible de torsión por I m de lar-gura de la barra;/: 100 cm.
de aceros al silicio 65C2de aceros de alta aleación
398
Los ángulos límites admisibles de torsión para las barrasredondas de torsión se puede tomar Oadm : 3 rdl100 cm.
- Para la amortiguación de las oscílaciones de los automóvilesactualmente se utilizan casi exclusivamente amortiguadores hi-dráulicos telescópicos de doble efecto de característica asimétrica,en los cuales el coeficiente de resistencia durante la carrera decompresión É.o* es menor que el coeficiente de resistencia É.",durante la carrera de expansión.
La absorción de ener§ía mecánica de las masas en oscila'ción se realiza en el amortiguador hidráulico a cuenta del roza-miento víscoso, que tiene lugar al trasvasarse el fluido por elsistema de estrangulación de una cavidad del amortiguador a la
Fig. 156. Caracter[stica esquematizada.de un amortiguador hidráulico telescópicode doble efecto.
otra. Por esta razón, el problema principal al diseñar el amorti-guador es el cálculo hidráulico del sistema de estrangulación,cuyo objetivo es obtener la característica deseada del amortigua'dor.
En caso general, la resistencia del amortiguador Pu es pro-porcional a la velocidad u, de desplazamiento de su émbolo; deacuerdo con esto, durante la carrera de compresión tenemos:P'^: l?"n,ru{; durante la carrera de expansión P" : Éou}, siendo m
y n exponentes que dependen de los parámetros hidráulicos delsistema de estrangulación y de la viscosidad del fluido en elamortigLr a dor.
La característica de los amortiguadores modernos se com-pone de cuatro sectores que corresponden a cuatro regímenes deóscilaciones: sLlave y brusco durante la carrera de compresióny los análogos en la de expansión. Una característica esquemáticade ese tipo está representada en la fig. 156; su parte derecha co-rresponde a la carrera de compresión y la izquierda a la carrerade expansión. Durante las oscilaciones suaves 1a característica esprogrésiva: la resistencia del amortigLlador, a medida que se ele-üan las velocidades de desplazaniento de las masas en oscilación,aumenta rápidamente, lo que contribuye a una mejor amortigua-ción de las oscilaciones. Cuando la velocidad de las oscilacionesQs considerable (los puntos I y 2 en !a característica), en el sis-
399

tema dedesahogose trasvador al aucon mayor lentitud (ramasesta manera las válvulas dmiten a través del amortigbruscos.
co normal. Se adntite que enon una temperatura eiternate de ventilácíón del amorti-mperatura en sus puntos más
neumáticos de los camiones sempleta del vehículo; en estedistrihuye en la ca ia unifor-neumáticos de los- tractores
y suspendidas. de las máquinas remolcadas
11".,-:."::,9: ll: :l:^gli l?,:litlgl,s. por ltrs.normas o el trabajtrcon. una presión del airJ en'el neumátiü inferiior al previisto, comor.egla no debe toterarse puesto q,''. pu"J" f';;;;;'r:';i.ii;lliáIdel oeríodo de sen.icin 'do tno ;..,,:;;;^^ D.. ,^- ,período de se^'icio 'cle los h.,,n,átüá.1 E;l;;^;ri;il¿;ii.'j";
Én su s)>, como ha sidlas de radiales de losiguale iones restantesdades el suelo), es uncia indic-adq permite en algunos casos reducir en cierto grado(hasta el 10Yo) la presión del aire en los nenmáticos con él finde mejorar las cualidades de tracción y adherencia del tractor.
Los datos de referencia de los neumáticos para tractores yautomóviles se dan con detalle en los estándares correspondien-tes.
§ 2. Tren de rodaje de los tractores de oruga
cia de las irregularidades del camino. Según este principio lassuspensiones de los tracto¡es de oruga se dividen en dos tipos:semirrígídas y elíLsticas.
Al ser la suspensión semirrígida todos los elementos de losórganos_ motrices: los rodillos de apoyo, los rodillos de soporte,las ruedas tensoras con los dispositivos de tensado, se móntan
Se utilizan clos tipos de amortiguación de los carritos de lasorugas: bilaterales (anterior g posterior) y ínilaterales... En [a. fig. .157 está representado el esquema de una suspen-
sión semirrígida con amortiguación bilateral. Los ca¡ritos de lasorllgas 1 están suspendidos en el bastidor del tractor con barras
en la parte delantera y trasera del bastidor.a está la barra de torsión 2 común para lospara su torsión 1as palancas 3, que unen lalos carritos, están ori,entadas en-dtrecciones
opuestas. En la parte posterior cada uno de ios carritos está sus-pendido.en Llna barra de t ¡espectiva-mente); las palancas 6 v 7 se or[entanen la misma direccíón Toda que actúansobre los carros de las oru de torsión,qlre se perciben por las barras de torsión, se transmiten al basti-
\reces se permite una sobreczrrga cle los neumáti.o, iir-'io_tso/0,si ellos se utitizan únicanrentE .ñ-.u*ino, .; É;;; ;riá¿, .onl,Ti1t::tg d; ho.rryjson.y asfalto a veiocidad.. llritujá."á. *o-.lltu-I:*l:lt^.o.^f:rl?T,."it:: dé servicios p nuricás,- ir,rs";;;';. ju re¿de comercio, etc.). Las normas para ia .áprdii"'á";; ¿ü; 'á. i;:neumáticos para tractores se clan "n lÁ* "^r.o"^nnrlia¡l^^ J^^..iyi:ti:?:_l:1, t'.1:lores se aan .9¡- I;';;;;.,p,i,i¿i",i* "d'"¿;:mentos técnicos conforme u ., ,tiiirr.i;;;""r'r;;il.i;r. d;;:!,400
40t

vés de los tubos g y 9 de las suspensiones
l--F-'L'-J-zJ-lJ--(-
i;l--,- i.]:¡*
l-'--i- -'-L-l--iFig. 157. Esquema de I ' ':'#i:fi..:Sf iligigi,,de un tracto¡ de oruga con
)
((
(ttt-
ttItrtcrf,t¡tl
Fig. 158. Esquema de unión del carrito orugas con el eje de la suspen_de lassión.
Durante eltransmite tambciones horizont
para marchar a velcon cualidadess se dividen ens.
,del.tractor se apoyaticuladamente eir é1,entre sí con balan_
ma más sencillooruga de la clase de B los tractores de
l. En cada carro
403

hay dos pares de rodilros de apoyo; los elementos elásticos sonlo de una suspensión de balancín
a en la fig. 33; aquí los ca-y los traseros tiénen cadayo unidos entre sí con balancines
a esto, los rodillos de apoyo
;:..0'1.' H.',l" i "1,
?,"1,?,::,3:En ras suspensiones individua,.r:ti'i: Íi:TIi33 rodiilos deapo)¡o se sus tractor
se une a él En calelásticos de ales semente barras
:Hi3.3:camino, lo que eleva la facultadla suavidad de su marcha.de balancín e individuales, en
vo r ab le de d ist ri b uc ión d e r u. ., i3l rt".T.l:t'. ^tJr
t3::.fi' r"o;i11'Por ejemplo, para la suspensión
sentada en la fig. Bl, tal casorecae sobre una oruga semient¡as que el otro estásuspensiones individuales esmitir tod.a la _carga originada plos rodillos de apoyo, cuando'
grado considerable determina elo. Siendo la suspensión semirrí-rse a pequeña distancia los unos
dan la posibilidad de lograr una
-; 1,7 siendo t^d el paso entsiones de balancín e individualde los rodillos a raíz de la necey las palancas de suspensión.general de la suspensión y.eldrocr : (2 + 5) ln.r.'
su sLrperficie sela llanta se har:eel desgaste.an sobre cojine-
cojinetes actúan [uerzas axiales q.e se originan Íl?lT¿.t?]t,t"Ji,:
404
nación longitudinal del tractor y al girar éste. [.as' cargas engrado considerable tlenen caráctér dinámico. Para reflejar la in-fluencia de los tres factores inclicados, al escoger los cojinetespara los rodillos de apoyo se adopta e[ coeficiente que tiene encuenta la naturaleza de la carga igual a tres.
El accionamiento de las orugas se efectúa por vía del engranede sus eslabones con las ruedas motrices. Se conocen tres tiposde engrane de las ruedas con las orugas, los que se diferencianpor la forma de las superficies de engrane de espiga, de crema'lLera y de dtentes. Con el en- , r^--grane de espigas las ruedas ar:-túran con sus dientes en las es-pigas cilíndricas de las orugas.Con el eng¡ane de cremalleralas espigas, por lo contrario, sedisponen en las ruedas motri-ces y en los eslabones hay cre-malleras. El par motor se trans-mite con las espigas de lasruedas motrices a las cremalle-ras de ios esl abones de I asorugas. Finalrnente, el engranede dientes se efectúa mediantelos dientes dispuestos en laparte interior de los eslabonesde las orugas y los respectivoscorona de las ruedas motrices.
Fig. 159. Perfilado de los dientes deIas rLredas de cadena con engrane de
espigas.
huecos de forma adecuada en la
En los tractores tiene aplicación preponderante el engrane deespiga (iig. 159). Analicemos cómo se realiza el perfilado de losdientes con un engrane de este tipo. Determinemos el radio r, de1a circunferencia que une los vértices de un polígono circunscrito,creado por los eslabones de las otugas al engranar con la ruedamotriz:
_ t_ _ l_
'P 2senp/2 . _ 180'. z t.n;;
sien lo /,: psSo de los dientes de 1a rueda;0:ángLrlo central, que corresponde al Iado del polígono
in dica do;zr : uúmero de dientes de la ruecla.
El radio r¡*¡ de la circunferencia erterior del piñón se toma:
/"*[:ro*0,75r".0,
siendo /'esp : radio de la esPiga.Et periil del diente de la rtteda consta cie tres sectores:
rectilínóo, el arco de una circunierencia trazado desdeelel
405

adirI*:.í;T¿,J..:J" i:?.f ii*ii?i j
__i
406
407
Fig. 160. Rueda tensor a rle ta -f--L de la oruga con el disipositivo tensor y amortiguador.
,Íl'll:'I:l,ljl,^1tjs,, ¿or son :
¿.r ,,,.riá H,"J.fl: ::..?j,:11no accione durante Iá_marcha

atrás o durante el frenado de la oruga retrasada al girar el trac-tor, o sea, en aquel los casos cLrando la tensión total de las ramassuperior e inferior de las orugas, que tiende a desplazar la ruedatenso¡a hacia atrás, puede alcanzar valcres elevados. En los trac-tores agrícolas se recomienda adoptai Po : 0,8 G, siendo G el
tencia las piezas de las ruedas tensoras y de ios dispositivostensor y amortiguador.
Además de la tensión co¡recta, en el funcionamiento de laorLlga influye la descentración de la llanta de la rueda tensora.A causa de dicho fenómeno se producen variaciones periódicas dela tensión de la oruga y surgen cargas dinámicas adicionales enla rueda tensora y en sus cojinetes, en la oruga y la rueda motriz.Por ello, durante el montaje, la explotación y despLLés de la repa-ración, es necesario verificar que la descentraciór de la llanta dela rueda tensora no exceda los límites determinados en los re-quisitos técnicos.
§ 3. Sistemas de frenado
El sistema c1e f¡enado del automóvil se compone de los irencls
para mantener el automóvil inmóvil; como freno de trabajo seutiliza poco, generalmente sólo en casos cle emergencia o al fallarlos Irenos de rueda. Un sistema cle frenos análogo tienen lostractores de ruedas de gran potencia de tipo industrial o inclus-trial-agrícola. En los tractores de ruedas agrícolas de tipo cLrlti-vador-universal y en los tractores de oruga los frenos, además desu función directa, se utilizan también en calidad de elementosdel mecanismo de giro; generalmente se disponen antes de lastransmisiones finales.
Principalmente se utilizan frenos cle fricción, los cuales porla iorma de la superficie de frotamiento se dividen en los de za-patas, de cintq y de d[scos.
En los automóviles se instalan de modo predominante frenosde zapatas. En la fig. 161 se mLlestra el esqúema de un freno dezapata sencillo que consta del tambor giratorio 1 1, cle dos zapatasinteriores 2 fijadas con articulaciones en los apoyos inmóvifes ,?;
entre los otros extremos de las zapatas está situado el dispositivo
408
de apriete 4 de tipo hidráulico, en el cual los émbolos del cilindrode trabajo, que se ha[[an bajo ta pres[én del liqLrido, aprietan am-bas zapatas al tambor con una misma f,terza P.
Durante el frenado entre cada superficie elernentaI de Ia za-pala y el tambor se originan la fuerza normal dN y la fuerza derozamiento ¡LdN, siendo pl el coeficiente de ¡ozamiento entre Iasuperficie (el [orro) de la zapata y eI tambor. Para cá[culos deorientación es posible adoptar apro.uimadanteate que después delesmerilado, las presiones específicas se distribuyen a Io Iargo del
Esquema de un freno de zapatas simétrico simple,
forro uniformemente y la resultante de las fuerzas normales, queactúan entre el tambor y la zapata, está dispuesta en el centrodel arco del forro.
Con las aproximaciones indicadas, en las zapatas del f renostmétrico, representado en la iig. 161, actúan las fuerzas resultan-tes normales lVr y lV2 y las fuerzas tangenciales de rozamientopNr y pr,V2. Las fuerzas de rozamiento en las zapatas izquierda yderecha están dirigidas en sentidos opuestos. En los apgyos ac-túan las reacciones respectivas; Ias horizontales R* y las vertica-les R, con el índice correspondiente aI número de la zapata.
De [a ecuación de los pares respecto a los ejes 3 tenemos:
N,:P a+c' c-|.re
n-J-^N,:P+, (212)' c+pe'
fuerzas que actúan en las zapa'siendo a, c '! brazos de lastas.
La luerza N¡ es considerablementeque en la zapata izquierda el par ¡rN¡bor y en la zapata derecha el par p1/2rrespondientemente serán diferentes
l4 3ax. $19
mayor que [a Iuerza Nz, Yae aprteta Ia zapala al tam-e la separa del tambor' Co'los pares de [renado que
409

Í,Tii"il}i,:'l| ",u cre ras zapatas Er par de frenado total delI"-ltr¿(N,*1/r): pttrt(a1- c)( |.\c_lte
(213).,.11:í^,: radio der tambor.Teniendo :'"r.*' ratIIDor'
ae tozaminnt^ ^_ Ia influencia de;:;,Í;.,::,1y:::;:;; i; $i:::?;'i j ,l.113omentos de las fuer.
:Tir^o",se distinguen lasí :o,?:::"?:',0:,,;l" I:i;l jÍ iJ !'fl?,
patas en las
Lxii'.:-á:'ri,rílir:li¡trfl ¿üiF;{*':f,T[t;H,{1j^:},l,:
+
Pt c-rteP2 c*lte'
Fig. 162. Esquema de un fre_^ ^^_,^ ---|....-
zapatas activas.iteno con dos Fig. 16,
o,?; t:fl,is: 5: ,,J1,,,1;i,?,1. ,..
.Teniendo en cuenta esto, lavalor del par de frenado tiár-ie'ia
Fig. 164. Esquema de un ireno decinta simple.
fórmula (213) para determinar elIorma siguiente:
Fig. 165. Esquema de un freno de cintaflotante.
a M-:2P.u, o *'"f '' ttn' | -;=-¡8. (214)Una imoortante ,cualidg4 d. explotación del freno es su sensi_bitidad a tás uartar¡onii-iá ;;riii;;;;'cte rozantienro, cuyo varor
Frl_(a_.- "r scpaaaCtOn.
zas de rozamiento ejerce una in-
410
puede cambiar en depenciencia del estado del ireno y ras condi-ciones de su trabaro trrnio m.;;;;; er-efecto de ras fuerzas derozamiento en la fo¡mación.d;i';;r';. fr:nado, tanto menor csla sensibilidad der fren.o., ra variá.iin der coeficiente d,e roza-H:ij:
y, tanto más estable-.r'i'^i* a. frenado que éste desa-En
en par ffi: rtl?,?i"l!,j"..J.:[,r1J; '::{:¿[:::;,, . .árüin* satisfactoriameñte con los
ExaL o s f r cn o s s en c¡ ¿rfoss,ti i*:', Éi,1,:?,i"1.. ; :'l :i i x: ?3 1 ;. .11?i,.mos de Ia cirta tiene el qn?vo-.r'irr¿"il ."^i;;ü;;.IL,ifio y, .totro extremo durante .r ii"iu¿á ;;'i;;r";;;'l;';ii;;;:".i,1,y ro,
14, 4l I
IIII
I
{
I
(
(
t(
t(
tttfl3r3
t,
ta
// // ((
I
r--r-\Lo

Los f renos de díscos tienen una serie de itivas:son compactos, cómodos de reg-ular, ofrecen n unl'
tór*. dá las presiones específicas sobre I roza'
rni.áto,-ét.. Esio contribuyd al incremento d en los
52: §,¿Eo
va rla
en lade latensaEuler
(215)
siendo e: base de los logaritmos naturales;,,:coeficiente de rozamiento entre'la cinta y el tambor;q,:ángulo abrazado por la cinta 1 i.i"[áLüoi'2'"., ,u-
ol anes.De la condición de equilibrio del tambor el par de frenado eneste caso será
M": (S, - S,) r,: Sr (epo - l) rt. (216)
,^ i,, :,,-i:qlg,gll, en sentido contrario las ramas tensa y ilojade la clnta cambian de Iugar y correspondientemente S1 :'Sr¿rio,el par de frenado.toma el v"aloi -r
,1'I;: (Sr - Sr) r, - t, (, - #)r,. (216a)
. .e desprende que el par l,fi esp f i":yi,i,;g8bt",;1il:,te cinta con el mecanism-o tensorddcorriente depende del senticlomente la cinta se coloca en elchar el vehículo adelante el parmarcha atrás.
En el freno flotante (fig. 16runidos con articulaciones e"n lo
la ranura del soporte. AI climbción los pernos iñmóvil y móvillos casos queda inmóvil el extque el extrcmo de la rama floilanca de accionamienio 4. Craápaz de desarroltar Ltn par de f ret(216), igual, el ntáxtnto posibl'e, ictLlo tttarcha hacla adelante o hacia atrds.
412
letra A.En el freno que se analiza hay cuatro
f ricción, por ello'su par de f renado totalM.:4PQRo,
pares de superficies de
(2t7)
uno de lossiendo Q: esluerzo de presión que actúa en cada
discos giraiorios;Ro : radio nñdio de rozamiento de los discos;p: coef iciente de rozamiento de cálcr-rlo'
Fig. 166. Esquema de un freno de discos'
413

En caso Darticrrlar, .cuanclo R¡ : Ro, lo que generalmente espróximo a Ia'realidad, ;ti;;;;"o;l' - "
rt'i,:¡ffi. e7b)Para excluir ra posibiridad de autofrenado ar sortar er pedares necesario, como se deduce de las fórmutái-erir;;i;., i'i," tg *
rozam^ie¡to ¡r. En las rnáquiñas0,6 +- 0,7)
os [renos se debe partir de lauiera condiciones sean capacesculo toda la fuerza de adherer¿-
amino-del f re-no se cleterminan por lasuperficie de rozamiento.presión específica tiene el má-
apata activa, donde ta distribu.pta da
Fig. I67. Esquema de Ias fuerzas del l¡eno de discos.
este valor de e en Inromento ,r; ;r;;r;' ccuación 12l7)ento del freno de¿I': ?##Tr;'
Q^áx: #t,
n, -
ll, c* Lte'"r- Pi'---rc '
. Seguidamente, admitiendo que c N e ede 1V¡ que corresponde a esto en la ecuación
¿r. (l * p).max ^ ) .zyria0
9",¿*: *,
(21B)
introduciendo el valor(218), obtenemos:
(2 I 8a)
(2 re)
415
fu erz ali¡rio ss.
que -actúan en el disco de
o al eix ,t"xli::;":'n la siguienie
PR + FQRo : 1y' sen o4u,de donde, teniendo en cuenta que ¡/: J_, tenemós
siendo qr : ángulo con que ra zapata activa abraza el tambor,rd;
({(rlrlr(r(
ttttttttf.ta
(r
S ust ituyen domos el valor del
Lg1^angql-os de contacto de las zapatas se toman en los rímitesa : 100 . 120; en lo sucesivo el au¡irentó ¿. ürlirgrirá", de con-tacto no da un efecto sustancial, puestá que en este caso se erevala ,irregularidad de la distribución de laé presion., "rp..iii.u*lo largo de los forros.
Para los frenos de cinta la presión especifica tiene el varormáxima ,máx e, el extremo de la' rama tensa, ¿"r¿é lá'f* rza detensión es máxima. De acuerdo con rá ecuación ae eutei tu pr"-sión específica, kgf/cm2, en este lugar
determína-discos:
(2tTa)+14

siendo Si: esfuerzo en el extremo dekgf ;
r, y b: respectivamente, radio delbajo de la cinta, cm.
Teniendo en cuenta que, de acuerdo
Ia rama.tensa de la cinta,
tambor y anchura de tra-
con las ecuaciones (215)
(220)
y (216), la fuerza de tensión de la rama tensa So: ,'1I"'o . .r, (e''o - l) '
tenemos:
^I_ eF,
4^á*: t¡ ' A" _ r. (219a)
Las presiones especílicas en la superIicie de rozamiento clelos frenos de discos se determinan, como en los embragues de dis-cos, partiendo de la magnitLrd del esfuerzo de presión en los dis-COS.
En Ios frenos secos los forros de fricción se fabrican o en
rado más intensivo no debe sobrepasar los límites qmár:6 *+ l0 kgf/cm2.
En la eliciencia del funcionamiento de los frenos y la resisten-:ia al desgaste de sus piezas principales de rozamiónto, Lrna in-'luencla considerable ejerce la temperetura de calentamiento del'reno, la que depende de la canticiad de calor emanado durante el
La tensión térmica del f¡eno pLrede ser ca¡acterizada por lanagnitud _del traba jo -específico del rozamiento 2.., kgf .m/cm2,ror unidad cle su superficie de trabajo:
,t¡t0iI_lLes
- i7- r.¡!
cies de rozamiento. Para mejorar la extracción del calor se utili',rn áiu.rros medios: introduciendo nervios en los tambores con
.f ii, -d.
.f.rar la superficie de enfriamiento, mejorando la venti-ir"lán v enf riamiento'forzado de los tambores, Iabricando los tam-
t";;i'¿.";;i;;i;lá, "on atro coeficiente de transmisión térmica,
etc' del [uncionamiento del sistema
de to de los frenos' que une e[ ór'ga con los órganos ejecutivos que
AC
El accionamiento de los frenos tiene que reunir una serie de
.onái.ion... En particular es deseable-que éste:""' ij-;;á, én'zun.ionamiento simultTnearnente todos los f renos
del vehículo;"- ,i'Ai.kibuya los esfuerzos de accionamiento entre los distin-
to.Jl.nor,-pariienaó cle los pesos de adherencia de Ias ruedas res-
Puesta en funcionamiento;cllidad de mando;que durante el lrenado se blo-
es el accionamiento debe Poseerdas con la necesidad de simul'
tanear la acción de los frenos del remolque y .del ve.hículo''.. §; émotean tres -[ipó.
principales dd aécionamiento de los
f renos; mácantco, hidráulico g nettmátíco'"''ñi;¿;i"namiénto mácánióo, realizado por un sistema.de.palan'cas v tirantes, no,rtüfr.. la mayoria de ias exigencias indicadas;
i"i'.lii,;; üt";r,t;;;;il;t éste'se utiliza únicimente en calidad
á;'.;;i";;i*tó ¿" los irenos de aparcamiento. En los tractores,
;-.;;r; de la seniillez del sistema'de frenado, el accionamiento
*..a"i.o está más difundido, pero en una sefie de casos se com--¡ini.on un accionamiento néumático para el mando de los Irenos
del remolque'-' Éi iip;'principal de accionamiento de Ios frenos de ruedas en
ro.lrió'*o'uit.t hé capacidad de carga pequeña y .media es el'iic¡oiá*¡rnto hídráutico. Su principál venta.¡a, además de Ia
áááá¿iJrá dó Lrtitizar comunicáciones ilexibles,- es que .el accio-
;;i;rt; hiáráulió asegura ur frenado simultdneo de todas Ias
ruedas, puesto que la presión en cer-
funcionar los frénos, comienza u "uen contacto todas las superficies oL''
rs el
rili normal-esfuerzores p ecto
417
iendo rt:tráSá del vehiculo que se frena, kgf .s2/m;ur: velocidad de marcha al comenzar el f renado, m/s;
^F>: superf icie de trabajo total de todos los frenos, cm2.A medida que aumentan [as velocidades de marcha se eleva
l tensión térmica de los frenos, por ello adquiere cada vez mayorrportancia Ia intensida d de extracctén del calor de las supeiii-
l6

i 4. La dirección
l8
I
i
Ia dirección con Iosra correcta cinemári",ejrt"t ji"l':,.1:q1. ,dirigidas y que,, .Éil;.:i,.:¡:#,f
!? uti. l'i,iiiÍS.., rül
I
.rrl',rflli'nismo ¿" ái'...iJr" i.til"'lirgi;:., ciertos requisitos
da de tal manera, quea _posición neutral 'al
??_2 vueltas det vo-
ción debe tener una, €tL qué sentído se
clon; en algunas est oceso de la explota-conjugados ?el ñecan entre los elernentos
s utilizados, de me-muestra el esouema._de. un mecanismo deel tornino sin tin .iliná.iáo'i'!",ái",r..t*
asegura n
I
I
I
(
II(((((((ttttt(a
t<l419
!t

«le dientes helicoidales 2. El mecanismo se muest¡a en Ia posición(lue corresponde al giro del vehÍculo.
La relación de transmisión del par de tornillo sin fin del me-canismo de dirección
¿m,d-=-tt. s
de dientes de la rueda de dientessector se cousidera como parte dede entradas del tornillo sin fin.
siendo zr: núfiteroles (el
2t. . - nUmefo
(22t)
helicoid a-la rueda);
Fig. I 68. Esquema de los tipos principales de mecanismosa-de torniilo sin [in cilíndrlco y scctor
de d irección:
El rendimiento deI mecanismo de torniIo sin fin:a) directo
b) inverso
tg0'l¡n.d-teG+a)' (222a)
, tgoTl.. ¿: EGT q, , (222b)
iendo F: ángulo de espira del tornillo sin fin;g: ángulo de rozamiento (tg q : p : coef iciente de ro-zamiento);
20
Fig. 168.
á-de tornlllo sin Iln gioboidal v rodlllo
oue Ios unen se llenan de bolas'' La relación de transmisión del mecanismo de dirección combi-nado que se analiza, puede ser determinado basándose en Ias con-.idéruóion.s siguientés. Al ángulo elemental de giro del tornillo
i
42t

d.V le correspondedistancia un desplazamiento axial de Ia
siendo r : radio del sector. dF:+'
tuerca a una
una distanciade dirección a
[:r#:fi::..ímportancia considerabre, se utirizan amplificadores
Pr',,,1[, l',*:d^"'^. l: dl^r_r].i:o,d., I a, di rección es un a t ransm is ión
ll,lll_ql:,,,':Tof ^f_",{9Tiq:d;"ri'b;",;',:'11,'i,JJ"X,liÍJ'#'ii.:ll, I 1"., i Í, I ,1:l .I" 19,^,! id,,,.ll lü . r q *' u n'' r," "* ff i,",' [ :" i",. : fr:.;ff :L :'] :11',", "1: ^' ::i
g,i bj I it :,á I, d;;; i. -. i' ;1;''á" i', ¿fl ?. ;?;';la correspondiente cavidad á., .iiiñi.';; ;;ñiffi,E"1,,'i[',i,i3 I
Lr^.jiir; qu_e _hace desplazar rr--¿*uolo, .i ;;;i";; i'iá'rrri¿n.,_
. vJHvr¡u¡errrtr savruaq qel c¡ilnoro se transmite el líquido a
Lr".,il|ri"q::l:i,: desplazar r, ¿*utlo, .i ;;;i";; l'i.n'rrr'tán"^_T".i"t." I?" -"llrl1I
1,..r, .i,g* n, du ;; - ;i
- L.;i"i -á."i,
¿ J "á;i' i;;áide la palanca de direccióír.
a_comr Fis. tos.)lnados de tornlllo_tuerca y cremallera _sector
o,r.?iointt' manera la reración de transmisión der mecanismo de
i .-da 2nrdp h (228)
anejo del vehículo se practica ampliamente
122
poseer una serie de cualidades es-El. hidroampliiicador debe
pecl a les.
?,: t:::l:i^ j:^f::cción dotado de hidroamplif icador debe:i,#il:f l:i1 .".,1^,11.o.,,
:. i ó I I
-., v, ;.; ;.il ",á
á J'¿;. ü I I. o EslE:l. p# :Ij : .:i^ j1,". : : rr ¡ li si.,, ;,' ;i' ;;i, ;;:' i".'X,.tX!, f,.,'..iÍnl:l I : :o :: ::l::: :, r,. p á. i.-i o n "; ;;i,. ; i, ;i'J;i;.,." ;, l, Ii!. i?,tA jldirigidas conservan tu. airá..l;n ór..rü'ú1":i;;"il HX.r¿f,:El amnlif icadnr rloho ^^"^:-',:'::"-'-' . ,
i:qll,i,l*1,9.!:_po.9er r,á a¡p;;;;;: ¿.-¡,;;;' in-.r .on.3Í:,:ili^,::,ll:.:i,.se1!lcion ¿;,g g o sea, que ér sienta,n!3il3 i,',"?,iÍ,l". i',. fo'i : á
" : ¿' :'ll::j¿: . l], " _ I i :] ::'j.ii:';' "q
,1 :' :1fl:i.^
y. Tllentar la resistencia ;l-;l;1. r.j:y:.lT^S,''
gi das a umñn te'tamú iá, - .t'.rirÉ'r;";;' ;i' l;!: 11:,á:dirección.
((
(.
I(
(
It
ttttttLEB33i3l..l'(3 :
La sensación de giro tiene especiar importancia para los vehícu-los de gran velociá'r¿. C.n.iálnr.nt.' .rto se lorsa introdu-cíendo en er disoositivo.de ¿i.tiiür.ián a.i rri¿r"r.i'pii?i.r'io,. ro,así denominados elementor á. -ián;;i;;
" imitadores, que aumen.
423

ción d ica, varía en límites relativamente pequeños'
Por el .r.o, .rundo para accionar el hidroamplifi-cador bomba independiente del rendimiento reqyg-
rido y dimiento voiumétrico suficientemente estableen dif nes de carga, es posible obtener u.n campo
aámisible de velocidades de giio aet vblante sin recurrir al em'
óf.o á. cualquier tipo de di " a tuberíaá.-i.priii¿n' de la'bomba, los auto'ñ;iiá.: E" aquettos caso iento del
triároamplificadbr se emplea culo, por
ejemplo, la bomba del sistem cu-vo ren-
ái*iÉntó es considerablemen para ali-*.ntái ul ámpliiicador, se debe la canti-dad de aceite'en la tu'bería de ímpulsión de la bomba; el aceiteque no se transmite al hidroampliiicador se tiene qxe evacuar'' Se debe señalar, que con'este sistema de alimentación del
ampliiicador, crece él óontr'no de potencia para .el accionamientoáe ia bombá, puesto q',e todo et áceite bombeado, incluyendo el
que va al derüme sin'pasar por el amplificador_ se halla.lajo.laiiesiOn indispensable pára el iccionamiénto del hidroamplif icadorde la dirección.
Como atestiguan invción, los conductores dede poca velocidad, elabode giro» por Ia posiciónóión'artif icial dei crecim 1a resistencia al giro con ayuda
áe elementos reactivos. Por ello en estos vehículos, en particularen los tractores, los imitadores de la sensación de giro o no se
utilizan del todo o tienen pequeña sensibilidad.
§ 5. Mando de las máquinas agrícolas suspendidas
Para el mando de las máquinas suspendidas se utilizan meca-nisrnos hidráulicos que entran en el sistema de suspensión del
tractor. Las funciones de mandmétodo de regulación adoPtado
e de las ruedas se realiza a mano,dispositivo a tornillo; la función
duce a efectuar diferentes oPera-enso de la máquina. Además, enmos hidráulicos se utilizan Paralas ruedas de aPoYo de la má-
ir la acción de la fuerza que éstanuir su resistencia a la tracción'
\
t
Fig. 169 Caracterlstica de trabajo.
.*Hpolde un ampliIicador Itidráulico rle la direcciónun camión.
_que el conductor debe aplicar en e[ volante de dirección. La curvade trazos l caracleriza los esluerzos en el volante sin hidioampli-f icador. Si el mecanismo está dotado de amplif icador, éstá comen-zará a funcionar en el punto.4. El sector AV en Ia cirva 2 corres-ponde al funcionamÍento del mecanismo de dirección con hidro-amplificad.or. En el punto B.la presión en la cavidad de trabajodel..amplificad_or es igual a ta presió, máxima que puede desá-rrollar la bomba y, como consecuencia, la acción dL esie último enlo sucesivo se interrumpe y el sector ertremo de ra curva 2 trans-
r. No obstante, es precisode una acción del amplifi-los límites de la pres[ón
urgir sólo en ciertos casos
La alimentación del hidroarnplificador se reariza por unabomba, q.u.e como funciona en ei aütomóvit-tiene r-rn amprio campode velocidades. Su rendimiento con las frecuencias de rotaciónmáximas pugde ser 7-8 veces mayor que con las mínimas. paraque Ia cantidad de aceite,.que.se tiansmite por unidad de tiempoal amplificarlor, orea aproximadamente constánte, en la tubería deimpulsión de la bonrba se sitúan dispositivos de dosificación ileuno u otro tipo que limitan el paso del aceite at amplificador; ellxceso de aceite transmitido poi la bomba se derramá por la vál-rula de paso.
La [recuencia de rotación del cígüeñal del motor de los trac-ores, trabajando cn concliciones noimales en el ramal de regula-
t24 425

deldel
li : ífr i1i4, r* ni í¡:T. :Tfl :i I .',í .:,, n,l,o i, :, :: i : i :;T :;p^ -
o.i
siendo Gr: p€so a. t, maqrin, n' ' (224)
; - 0"
- r , eeleva;: relación de transmis el mecanismo depn d9 Ia veloci-r centro de gra-u. de despla"za-
que tiene, en cuenta Ias fLler-las ar. ...,;i :.#¿.., ".T:, 1;:¿: i.H
,;
el cálculo de los mecani. suspendidas: smos de m¿ndo de nráquinas
máqulna suspendida. á_diagrama de velocldades.
n
Fig. lZO. Esquenras para
d -esquerna de la
?,'."-t"'=s.de rozamiento im-.l .íti;,;rj:sulrado, r" ..¿r.á .o-
,.,"i:|f,ji et transcurso de Ia ere-noo
"'i' l,:i1 diversas po-siciones
b. I aragrama de vc'loci¿aJe"sl
426

,,0
,t,,,,3
,,,I,3,3
T,Lqr]:u,T1.- p..,.rdu, con la.qüe puede i.rlá¡ri óf
cavidad de ele-
émbolo del ci-
que al elevar la,:,:.y",,,o,rrrár p.tr¡auA, cun la que puede trabajar el tractor, la pre_slon en la cavidad dc trabajo no superc et varor máximb adrni-
siendo d": diántetro de trabajo del émbolo en lavación del ciiindro, cm;P": esfuerzo d-e elevación que actúa en ellindro, kgi.
. El. diámetro d. debe ser elegido de tal manera
sible q-n*. El valor 4¡¿¡. se 'toma
de Lcuerdo .ón ui-iipá'f estruc.tura de la bomba del mecanismo hidráulico. para tas bombas de::-gr-ri!9..,.utilizadas el^!o: sistemas de suspensiOn
-¿é-ió, tro.-tores soviéticos, ?_¿x = 100 l<gf/cm2
Para la suspensión posterior el peso máximo G..r* de la má-, de que el momento de vuelcontro de presión en los tractores
en los tractores de ruedas nopeore su manejo. partiendo delos tractores de ruedas que,
siendo G: peso del tractor;a y a,: coordenadas longitudinales de
vedad del tractor y ia máquinativamente;
(226)
los centros de gra-suspendida respec-
Xud**in : coeficiente admisible de reserva de esta-bilidad longitudinal del tractor.
los datos medios existentes para la mayoría de las má-
G""max
J'3r$
j33
Porqulnasmente,
suspendidas pesa-das, que aqui se tratan, á, x 2a. SegLriJa-adoptando en la ió¡muia anterior r¿ - o s nhtp.om^o.adoptando en la ió¡mula ante¡[or Xra,n.¡n:0,5, obteñemoi:
G"-m ax (226a)
f ue admitido que el rendimiento mecánico del mecanivación r¡.:0,8.
428
Basándonos en las correlaciones expresadas en las ecuaciones(22a) y \225),.determinamos la dimensión requericla rlel Jiámetrod", cm, del émbolo en la cavidad de elevación del cilinclio:
lZ¡" 'd.:N dffi. Q27)
En esta ecuación l.*r, es el valor máximo que alcanza la rc_lación de transmisión i" en el proceso deque tiene un voladizo dete¡minado del c: 2a; generalmente esto se produce en IG es el peso del tractor, kgf. Además, al
Según el valor hallado de d" se elige el diánretro interiorcilindro en correspondencia con los estándares existentes.
Los diámetros de los cilindros desplazables que se instalan enlas máquinas agrÍcolas remolcadas, en los las má-quinas suspendidas etc., se eligen partiend de má-quinas con sistemas hidráulicos que se a tractordado. Generalmente éstos tienen un diáme r que eldel citindro principal, destinado para el mando de las máquinassusperrdidas en la parte posterior del tractor.
La ca¡rera s" del émbolo del cilindro debe ser suficiente, paraque durante la elevación de cualquier máquina a la posición detransporte, bajo sus órganos de trabajo quede la luz indispensa-ble y, cuando Ias máquinas se bajan sus órganos de trabajo pue-dan penetrar en el suelo a la magnitud máxima exigida por lascondiciones agrotécnicas. Partiendo de ello es posible adoptar,basándose en los datos prácticos existentes, que la carrera sq delej e de suspensión de las máquinas de una posición extrema a laotra no debe ser menor que 70-75 cm para los tractores de ruedasy 75-85 cm, para los tractores de oruga. Los valores mayores deIa carrera del eje de suspensión en los tractores de oruga se re-comiendan para elevar la ltz bajo los órganos de trabajo de lamáquina. Esta necesidad se provoca por ser considerables lasoscilaciones longitudinales - angulares de los tractores de orugaal marchar por caminos irregulates, a causa de lo cual la magni-tud real de la luz de transporte bajo las máquinas resulta en unaserie de casos menor que la calculada.
La carrera necesaria del émbolo del cilindro s6, clrl, puede serdeterminada por la ecuación:
Sres, (228)
siendo ll:valor medio de la relación de transmisión ls por todoel ciclo de desplazamiento del eje de la suspensiónde una posición extrema a la otra;
sres: reser\¡a de la carrera, cm, indispensable para evitarque el émbolo golpee en Ia tapa del cilindro al mar-char por las irregularidades del campo, cuando elmecanismo hidráulico se establece en posición «flo-tante>>.
El valor de li se obtiene trazando el diagrama de velocidadesanalizado más arriba para una serie de posiciones sucesivas dela máquina suspendida. La reserva de la catrera se toma en loslÍmites sr.es : 2,5 --=- 5,0 cm.
En la Unión Soviética para todos los cilindros de los sistemasde sLrspensión en los tractores se ha establecido una sola medidade la óarrera completa del émbolo, sc:200 mm. En la mayoría
S6Sc: -17 t
ismo de ele-
429

de los sistemémboio. " ""'áS s€ prevé ra posibirídad de regurar ra carrera del
430
te de rigidez del muelle del acu_
rllllt(r(r(((t,t(t(t
il(t
§,L

Coeflclentes de reslstencta a la. rodadura f y coeflclenteqe tracto¡es
APENDICE
Tabla Ide adherencla q
Tractores conneumátlcos Tractores de oruga
TIpo de camtno
De tierra secoTierras virgenes baldio
com p actoBaldío sln labra¡
2-3 años, pfado se-gado
Ra stroje raCampo labradoCampo preparado para
la siembraSuelo turbo-pantanoso
desaguadoCamino de nieve apiso-
na da
0,03-0,050,05-0,07
0,06-0,08
0,08-0, t00,12-0,180,16-0,18
0,03-0,04
0,6-0,80,7-0,9
0,6-0,8
0,6-0,80,5-0,70,4-0,6
0,3-0,4
0,05-0,070,06-0,07
0,06-0,07
0,06-0,080,08-0. l00.09-0.I 2
0,06-0,07
0,9- I ,l1,0- 1,2
0,8- t,00,6-0,80,6-n,7
0,4-0,6
0,5-0,7
Coellclentes de ¡eslstencla a
Carretera asfaltadaCam lno de grava-macadamizadaPavimiento de guijoCamino de tierra secoCarnino de tierra después deArenaCamino de nieve apisonada
Ia rodadura f y coeflclentetle automóviles
0,0 t 5- 0,0200,020-0,0300,025-0,0350.030-0,0500,050 -0, I 5l0, I 00- 0,3000,030-0,010
Tabta 2de adherencla rp
0,6-0,750,5-0,650,4-0,500,5-0,70
0,35-0,501,65-0,750,3-0.35
Indice
I ntrod ucción
VILES
Capítulo III. orxÁ,rrrcn cENERAL DE TRACToRES DE oRUCA
§ l. Propiedades fi suelo . 40§ 2. Propiedades. fi neumático . 48§ .r. I taDa ro de la 47§ +. traoalo ¿á tu§ s. ó.ill*-,"i"lldi .' ntrrri..' ¿; 'camino' .; lu;
s2
^ ^ iuedas.dela.nteras y.traseras de tractores y automóvilei' . -.' .-. 5g
s 0. Determlnaclon de las reacciones normales del suelo en las_ .ledas del tractor trabajando con máquinas agrÍcolñ su1p."aidái É5Ejemplos de cálculo . . .
-. : -. -.--:":-^. -. 72
llI5Cspítuio i oeLe¡¡ce DE TRACCTóN DE TRACToREs y AUTo.ltóvtLES.
§ l. Determinación de los momentos de impulsión aplicados a lasruedas motrices
§ 2. Fuerza tangencial de tracción y reacción de impulsión delcamtno
§ 3. Fuerzas de resistencia a la ma¡cha .
§ 4. Balance de tracción y ecuación diferencial de marcha .
Ejemplos de cálculo . .
Capítulo II. olNÁ,r.rrc¡. GEivERAL DE TRACToRES DE RUED.{s y
l5
26293337
40
§ l. Trabajo de Ia oruga .
§ 2. Determinación de- la posición dede oruga
§ 3. Distribución dela superficie de
Ejemplos de cálculo
normales del suelo a [o largo dcorugas
del
las reaccionesapoyo de las 87
9{
98t05ll5l2l129139
Capftulo
§r.§2.§3.§4.
§5.§6.
IV. or¡lÁ.u-rca DE TRACCTóN y ECoNo^tlA DE coMBUSrrBLE.
(egistro de la caracteilstica experimenlal de tiacción .
433

Capítulo V. rcouor*feDE Auro*o'v;;. .':l':.
DE coMBusrIBLE y DrNii.elrcA DE rRAcc¡óN
il#,{lj|Í{.;i.t{"-i,'1 "':': 1. .,,r.,:,.: con máqu rnas suspend i.
((:(((
ttttfrtr¡l
I § i B:iJ,.??¿::*ii1i'j,*,,"li -. g.uuóá;t"'on exPe¡imen
Ejemplos ¿Ji,af.rlf
sto\rEs. .,, 34g
Capítulo XIII.. RODAJE Y DE L OS.PRINCIPALES
DEL TREN DE-?oa
Capftulo X. asrlgrLrpAr
Sl *rijl,.,¡s,l::+:'ifu;,t :':'I]'i"'lu)"'." : :
'1;:
r (¿N DE
'v.¡¡vvres y de tra 393
s tractores de'oiug, .:t:": 1t . ':u'.ut'. '.'u. ,r,,_l :.:::I..:: . :,'3¿
Apéndice asagricolast"iptn'titi""
":. . 'qlá..425
, 432

IOf¡lol¡ooaaotota¿acc
A NUESTROS LECTORES:
«Mir» edita fibros soviéticos traducidos al español, lnglés, fran-cés, árabe y otros idiomas extranjeros. Entre ellos figuran las me-jores obras de las distintas ramas de la ciencia y la tácnica; ma-nuales para los centros de enseñanza superior y escuelas tecno[ó-gicas; literatura sobre ciencias naturales y médicas. También se in-cluyen monograffas, libros de divulgación científica y ciencia-fic-ció n.
Dirijan sus opiniones a la Editorial «Mir», I Rizhski per,, 2,129820, Moscú, I-110, GSP, URSS.
MIR PUBLICA:
Jróbostov S.
EXPLOTACION DEL PARQUE DE AUTOIVTÓVILES Y TRACTORES
En esta obra se exponen los fundamentos teóricos de la explotacfon delparque de automóviles y tractores de Ias cooperativas y granjas.
El autor ha aspirado acumular en la misma toda la experiencia del com-pletamiento técnico y la explotación de vehículos de toda clase, del mante-nimiento técnico de éstos.
Hay un capítulo especial dedicado a la mecanización y organización delos trabajos de carga y descarga en la agricultura.
Además, en este libro de texto se estudian las caracteristicas básicas dela explotación de los vehículos y equipos, las instrucciones acerca de sumantenimiento y los métodos del diagnóstico del estado de los mismos sinprevio desmontaje. El autor presta especial atención a la tecnologfa morlernade los trabajos mecanizados y a los métodos y procedimientos de la compo-sición de las cartas tecnológicas para el cultivo de diferentes culturasagrfcolas y para llevar a cabo otras operaciones en el campo.
El libro contiene un rico aparato bibliográfico y datos auxilia¡es a basede los últimos logros de la ciencia y la técnica
Esta obra está destinada para los estudiantes de escuelas técnicas de nivelmedio que cu¡san la especialidad «.iVlecanización de la agricultura».

Estey otros o a estudiantes de escuelas técnicas agrlcolasde estudi antes. Se basa principalmente en
_ui progrr*,
tractores, ,tt?::"'u" y servicio de equipos eléctricos de
El libro abarca prácticamente toda
Smelov A. y otros
REPARACION DEL EQUIPO ELECTRICO DE AUTOMÓVILES Y TRACTORES
l,:^:.,i^r-..qr"da edición se ha consideraáo'lr' ro¿.rnirr.i¿n:i.".j' ::::, j^111:_ :.:,
p:nen te d e r.; ;ñ ;;,';."';."' ;ií,';:"J1:: "l:1"1:::'ipción
de los instrumen,;-;;,,;";"'r,ilil::más avanzados.
También se estudian algunos instrumentos de control ycomo manémetros, termómelros, señalizuaorar, indícadores delbustible, amperímetros, spidómetros, etc. Ei ribro concluyerecomendaciones y reglas de seguridad inaustriat, aplicables ende energia eléctrica (l l0_BB0 Vf y elementos-iá*i.o..
Gurévich A., Sorokin E.
TRACTORES Y AUTOTTOVILES
De este libro han ap.arecido en ta URSS tres ediciones, con un tiraje totalaproximado de 500.000 ejemplares.'drt¿-ir]ir"lao al ingtés y a varios idiomasde los pueblos de la URSS.
.0,.,1Í presente traducción al español se realizó en base a la 3a (última)
ituIos técnicos de rtrlecanización agricola,». Se emplea también en los centrosma terial didáctico sobre la construcción
para los especialistas que trabajen ende automóviles y tractores en diversas
de temas de contenido técnico general,res y los au tomóviles, las bases de laalance de tracción y potencia de los
e los motores y tractores.de tractores y automóviles ocupa u11
también la interacción e instalación depera la prevención y eliminación cle losn a algunas tendencias de la técnicajemplo, la elevación de la economía rle
res, el mejoramiento de las condicioneseforzadores hidráulicos del mec;l-para Ia dirección del trabajo dentes e hidráulicas fijas.
bloques y mecanismos de tractoresde los modelos más extendidos ens DT_75, T.74 y de tractores dey de los automó,,.iles CAZ-53.{ y
med ición ta Iesnivel de com-con algunasla utilización
de los equiposmodelo§, y seen los talleres
({r{({({
{I'iiII
((
((
(((
(l
(((l
((
(f
((
((
Q