GUÍA MÉTODO DE RIGIDEZ DIRECTA O GENERACIÓN...
28
Universidad de Santiago de Chile Facultad de Ingeniería Depto. de Ingeniería en Obras Civiles GUÍA MÉTODO DE RIGIDEZ DIRECTA O GENERACIÓN DIRECTA. Realizado por: Sergio Currilen. Diego Valdivieso.
Transcript of GUÍA MÉTODO DE RIGIDEZ DIRECTA O GENERACIÓN...

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 0
Universidad de Santiago de Chile
Facultad de Ingeniería
Depto. de Ingeniería en Obras Civiles
GUÍA MÉTODO DE RIGIDEZ DIRECTA
O GENERACIÓN DIRECTA.
Realizado por:
Sergio Currilen.
Diego Valdivieso.

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 1
Algoritmo Método de Rigidez Directa
i) Reducción de la Estructura.
ii) Determinación de los Grados de Libertad.
iii) Determinación de los Grados de Libertad Independientes de la estructura,
mediante la aplicación de compatibilidades geométricas.
iv) Matriz de Transformación de grados de libertad dependientes a independientes
[ T ].
v) Momentos de Empotramiento Perfecto (Estructura A y Estructura B).
vi) Deformación Unitaria de cada Grado de Libertad Independiente de la
estructura, (ri=1; rj =0 para todo “ i ” distinto de “ j ”).
A continuación se presentan las deformaciones bases para el método, dado una
barra AEI de longitud conocida L, y que es sometida a giros, desplazamiento
vertical y desplazamiento horizontal.

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 2
vii) Obtención de los coeficientes de la matriz de rigidez para luego obtener la
matriz de rigidez referida a los grados de libertad independientes [ Kq ].
viii) Vector de fuerzas externas { R }, y determinación de { Q }.
ix) Ley de Hooke Matricial [Kq]*{q}={Q}, y obtención de giros y desplazamientos.
x) Calculo de Esfuerzos, despiece y diagramas.
Nota: Recordar que Kij es el esfuerzo provocado en el GDLI j al deformar
unitariamente el GDLI i.

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 3
Ejercicio N°1
Para la estructura que se muestra a continuación, se pide determinar la matriz de
rigidez referida a los grados de libertad independientes de la estructura (Kq); sin
embargo se debe considerar en los cálculos de cada coeficiente el grado de
libertad diagonal dado, y que se muestra en la figura.
AE= 10 EI
Solución:
a) Primero se debe determinar los grados de libertad de la estructura, estos
corresponden a las coordenadas que describen las posibilidades de
movimientos en los nudos.
b) Ahora se deben establecer las compatibilidades entre los grados de libertad
de la estructura, de tal manera de establecer los grados de libertad
independientes de la estructura, estos corresponden a los grados de
libertad mínimos para representar el desplazamiento de la estructura.
Las compatibilidades son del tipo:
- Para la barra EI
( )

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 4
r1r2r3
- Para la barra infinitamente rígida
Las compatibilidades para este caso estructural:
cos α= 3/5; sen α= 4/5
Entonces se obtiene finalmente la matriz de compatibilidades entre grados de
libertad que resulta del análisis de { r } = [ T ]*{ q }
c) Establecer las deformaciones según cada caso de grados de libertad
independientes para luego determinar los coeficientes de la matriz de
rigidez, para los siguientes casos
Caso 1: r1=1, ri=0
(1) *
T
1
0
0
0
0
1
2
1
0
0
2
5
0
1
r1
r2
r3
r4

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 5
(
)
(
)
Caso 2: r3=1, ri=0
(
) +(1)*
[
(
)
] [
(
)
]
=>
[
(
)
] (
)
=>

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 6
Caso 3: r4=1, ri=0
(
) + (1)*
[
(
)
] [
(
)]
[
(
)
] (
)
d) Finalmente reordenando los términos de la matriz se obtiene la matriz de rigidez
de la estructura referidos a los grados de libertad independientes. Se puede
verificar que la matriz es simétrica y los términos de la diagonal son positivos.
[
]

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 7
Ejercicio N°2
Para las figuras que se muestran, determinar:
i. Matriz de rigidez relacionada a los grados de libertad independientes de
la figura 1.
ii. Rigidez del resorte helicoidal que se muestra en la figura 2, que resulta
de reducir los elementos de la figura 1.
Figura1.
Figura 2.
Solución
a) Primero se debe determinar los grados de libertad de la estructura, estos
corresponden a las coordenadas que describen las posibilidades de
movimientos en los nudos.

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 8
T
0
1
0
0
0
0
1
L
0
1
1
0
1
1
L
0
0
0
1
2
1
L
r1
r2
r3
r4
r5
r6
b) Ahora se deben establecer las compatibilidades entre los grados de libertad de la estructura, de tal manera de establecer los grados de libertad independientes de la estructura, estos corresponden a los grados de libertad mínimos para representar el desplazamiento de la estructura.
Las compatibilidades son del tipo:
- Para la barra EI
( )
- Para la barra infinitamente rígida
Finalmente se tienen las siguientes compatibilidades:
De la últimas dos compatibilidades resultaría:
( )
Así la matriz de compatibilidad será:
r2r4r5

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 9
c) Establecer las deformaciones según cada caso de grados de libertad
independientes para luego determinar los coeficientes de la matriz de
rigidez, para los siguientes casos
Caso 1: r2=1, ri=0
Detalle de la deformada:

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 10
√
(
)
(
)
Caso 2: r4=1, ri=0
(
)
+(-1)*

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 11
+(1)*
+ (-1)*
(
)

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 12
[
(
√
) (
√
) (
√
)
]
[
(
√
) (
( √ )
)
( √ )
]
[
(
√
) (
( √ )
)
( √ )
]
[
(
)
]
√
[
(
√
) (
√
) (
√
)
]
[
(
)
]
√

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 13
Caso 3: r5=1, ri=0
(
)
+(1)*
+(2)*
(
)

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 14
[
(
√
)
]
[
(
√
)] [
(
√
)] [(
)]
√
[
(
√
)
] [
( ) (
) ]
[
(
) (
)]
√
d) Finalmente reordenando los términos de la matriz se obtiene la matriz de rigidez
de la estructura referidos a los grados de libertad independientes. Se puede
verificar que la matriz es simétrica y los términos de la diagonal son positivos.
[ ]
[
]
Ahora se procede a calcular la rigidez del resorte helicoidal, este último representa
la rigidez al giro en las barras EI diagonales, más la rigidez al giro de la barra AEI
vertical.

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 15
Si se analiza la deformada debido al giro en el nudo central, tenemos lo siguiente:
Entonces si se suman las
rigideces al giro de cada
barra tenemos:
√
Entonces la rigidez del
resorte helicoidal que
resulto de la reducción de
la estructura es:
√

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 16
r3
r1
r4 r2
Ejercicio Nº3
Encontrar la rigidez del resorte si se sabe que el desplazamiento horizontal en A
es 0.05 m.
Solución
i) Grados de Libertad.
4GDL
1 Compatibilidad => 3GDLI
ii) Compatibilidad geométrica y Matriz de Transformación.
( )
=> r3= - r4
EI=1250 T*m2 AE= 10EI
EI
AEI
k
20 T
AEI
4 3
3
10 T 45º 60º
A
T
1
0
0
0
0
1
0
0
0
0
1
1
r1 r2 r4
r
1 r2
r3
r4

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 17
iii) Deformadas de los grados independientes.
Deformada 1. r1=1, y r2=r3=r4=0.
[
]
[
]
[
] [ ]
Deformada 2. r2 = 1, y r1=r3=r4=0.
*(1)
*(1)
*(1)
*(1)
*(1)
*(1)
*(1)
*(1)
√ *(1)
( √ ) *(1)
( √ ) *(1)*cos(45)
( √ ) *(1)*cos(45)

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 18
[
]
[
√ ]
[
( √ ) ( )] [
( √ ) ( )]
Deformada 3. r3= -1 , r4 = 1. y r1=r2=0.
Para simplificar el análisis, se presenta por partes:
Para el resorte:
√
√ *cos15
√ *cos15
√ *cos(15)sen(30)
√ *cos(15)cos(30)
60º
15º

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 19
Para barra vertical. Para barra horizontal. Para barra diagonal.
[
]
*(1)
*(1)
*(1)
*(1)
*(1)
*(1)
( √ ) *(√ )*cos(45)
sen(30)
( √ ) *(√ )*sen(45)
cos(30)
( √ ) *(√ )
( √ ) *(√ )

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 20
Kq
714.29
357.14
153.06
357.14
3559.46
91.02
153.06
91.02
6944.51 5 K
q
r1
r2
r3
q
r1
r2
0.05
R
0
0
10
20
Q
0
0
30
[
( √ ) √
]
[ √ ( ) ( )
( √ ) √ ( )
]
[ √ ( ) ( )
( √ ) √ ( )
]
iv) Matriz de Rigidez de GDLI.
Ordenando los coeficientes encontrados:
v) Vectores de F. externas y vector de desplazamientos.
como r4=0,05
pero {Q}=[T]T*{R} =>
vi) Ley de Hooke Matricial.
{Q}= [Kq]*{q}
r1 = 0,012 rad
r2 = -0,0025 ra
k = 1260,68 T/m
r1 r2 r4
r
1 r2
r4

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 21
r1
r2
r3
r4
r5
1
2
Ejercicio Nº4
Determine la matriz de rigidez de la siguiente estructura y calcule ∆TA. Además
calcule esfuerzos en las barras.
i) Grados de libertad.
GDL=5
Compatibilidades=2.
GDLI=3
C
ii) Compatibilidades geométricas y matriz [T].
2r1 = r5 – r4 => r4 = r5 - 2r1
2r1 = r2 – r3 => r2 = r3 - 2r1
2
10 T A
AEI
AEI
20 T
2
2
2 3
[m]
T
1
2
0
2
0
0
1
1
0
0
0
0
0
1
1
r1 r3 r5
r1
r2
r3
r4
r5
EI=1000 T*m2 AE=10EI

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 22
iii) Deformaciones de los grados de libertad independientes.
Deformada 1. Para el grado 1. r1=1, r2=2, r4=-2, r3=r5=0.
Giro r1=1.
( + )
Desplazamientos r2=2, r4=-2.
( √ ) *( √ )
( √ ) *( √ )
( √ ) *( √ )*cos(45)
sen(30)
( √ ) *( √ )*cos(45)
cos(30)
2√
( √ ) *( )
( √ )*( )
( ) *( )
( )*( )
( √ ) *( )*cos(45)
sen(30)
( √ ) *( )*cos(45)
cos(30)

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 23
[
√
( √ ) ( √ )]
[
( √ ) ( )
( √ ) ( √ ) ( )]
[
( √ ) ( )
( √ ) ( √ ) ( )]
[
√
( √ ) ( √ )]
[
( √ ) ( )
( √ ) ( √ ) ( )] [
]
Deformada 2. r2=1 y r3=1, r1=r4=r5=0.
[
( √ ) ( )] [
( √ ) ( ( ))
√ ( ( )) ]
[
√ ( ( ))
( √ ) ( ( )) ]
( √ )*(cos(45))
*( )
( √ ) *(cos(45))
)
( √ ) *(sen(45))
( √ ) *(cos(45))2
sen(30)
( √ ) *(cos(45))2
cos(30)
( √ )*(cos(45))2
sen(30)
( √ )*(cos(45))2
1
1

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 24
[
( √ ) ( ( ))
√ ( ( )) ] [
]
[
( √ ) ( ( ))
√ ( ( )) ] [ ]
Deformada 3. r4=1 y r5=1, r1=r2=r3=0.
[
( √ ) ( )
] [
( √ ) ( ( ))
√ ( ( )) ]
[
√ ( ( ))
( √ ) ( ( )) ]
[
( √ ) ( ( ))
√ ( ( )) ] [ ]
[
( √ ) ( ( ))
√ ( ( )) ] [
( ) ]
*( )
*( )
( √ ) *(cos(45))
( √ ) *( ( ))
( √ )*(cos(45))
( √ ) *(cos(45))2
sen(30)
( √ ) *(cos(45))2
sen(30)
( √ ) *(cos(45))2
cos(30)
( √ ) *(cos(45))2
cos(30)
( √ )*(cos(45))2
sen(30)
( √ )*(cos(45))2
sen(30)
( √ )*(cos(45))2
( √ )*(cos(45))2
1
1

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 25
r
r1
r2
r3
r4
r5
2
q
r1
r3
r5
R
0
10
0
0
20
Q
20
10
20
r
0.00289
0.00391
0.0019
0.0045
0.0103
q
0.0029
0.0019
0.0103
iv) Matriz de Rigidez asociada a GDLI.
v) Vector de fuerzas externas y de GDLI.
{Q}=[T]T*{R} =>
vi) Ley de Hooke Matricial.
{Q}=[T]T*{R}
{r}=[T]*{q} =>
Nos piden el desplazamiento total del punto A. Esto es:
∆T = √
∆T = 0,0059 m
Kq
11232.83
1590.99
924.324
1590.99
5366.27
1502.602
924.324
1502.602
2477.38
r1 r3 r5
r1
r2
r3
r4
r2
∆T
Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 26
16,23
16,23
M
1a
13,47
13,47
3,78
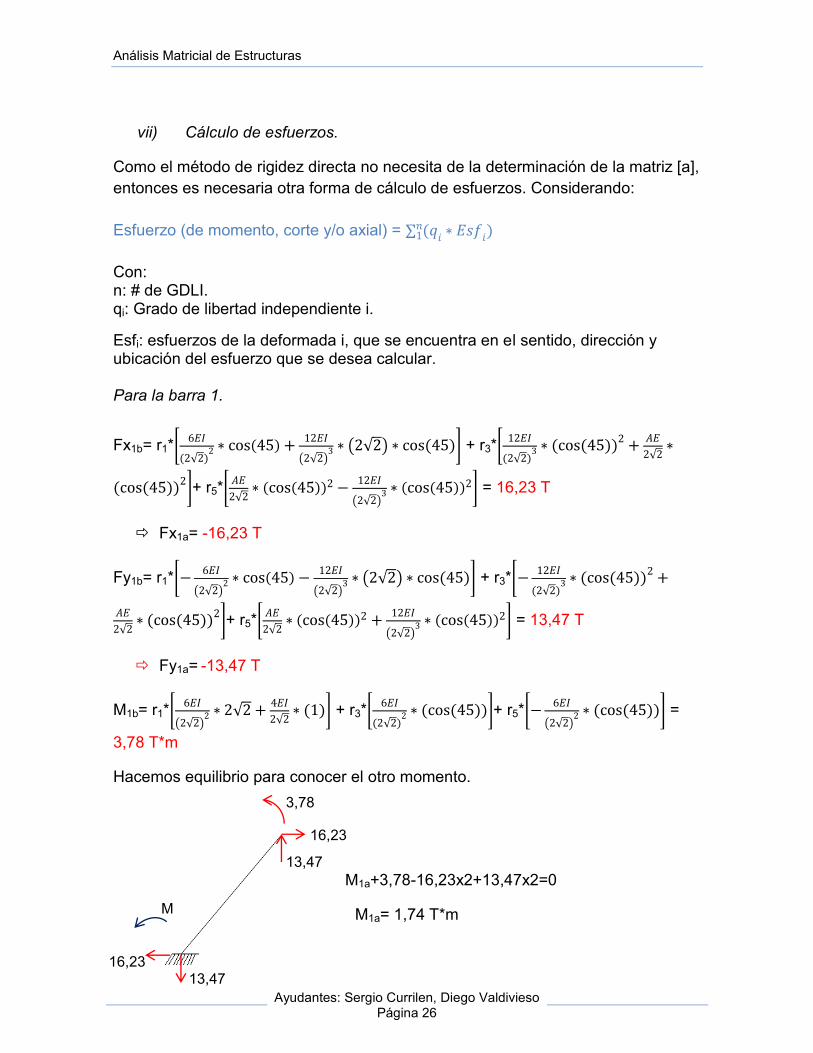
vii) Cálculo de esfuerzos.
Como el método de rigidez directa no necesita de la determinación de la matriz [a],
entonces es necesaria otra forma de cálculo de esfuerzos. Considerando:
Esfuerzo (de momento, corte y/o axial) = ∑ ( )
Con: n: # de GDLI. qi: Grado de libertad independiente i.
Esfi: esfuerzos de la deformada i, que se encuentra en el sentido, dirección y ubicación del esfuerzo que se desea calcular. Para la barra 1.
Fx1b= r1*[
( √ ) ( )
( √ ) ( √ ) ( )] + r3*[
( √ ) ( ( ))
√
( ( )) ]+ r5*[
√ ( ( ))
( √ ) ( ( ))
] = 16,23 T
Fx1a= -16,23 T
Fy1b= r1*[
( √ ) ( )
( √ ) ( √ ) ( )] + r3*[
( √ ) ( ( ))
√ ( ( )) ]+ r5*[
√ ( ( ))
( √ ) ( ( ))
] = 13,47 T
Fy1a= -13,47 T
M1b= r1*[
( √ ) √
√ ( )] + r3*[
( √ ) ( ( ))]+ r5*[
( √ ) ( ( ))] =
3,78 T*m
Hacemos equilibrio para conocer el otro momento.
M1a+3,78-16,23x2+13,47x2=0
M1a= 1,74 T*m

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 27
6,51
10,73
6,33
6,33
Para la barra 2.
Fx2a= r1* + r3*[
]+ r5* = -6,33 T
Fx2b= 6,33 T
Fy2a= r1*[
( ) ] + r3*[ ]+ r5*[
( ) ] = 6,51 T
Fy2b = -6,51 T
M2a= r1*[
] + r3*[ ]+ r5*[
( ) ] = 10,73 T*m
Hacemos equilibrio para conocer el otro momento.
M1b+10,73-6,51*3=0
M1b= 8,8 T*m
1
16.23
13.47
1.74
16.23
13.47
3.78
Fx1a
Fy1a
M1a
Fx1b
Fy1b
M1b
6,51
M1b
2
6.33
6.51
10.73
6.33
6.51
8.8
Fx2a
Fy2a
M2a
Fx2b
Fy2b
M2b