Guía 1A Ecuaciones Diferenciales de Primer Orden · nita depende de una única variable...
123
Guía 1A Ecuaciones Diferenciales de Primer Orden Diego Vallejo, Melina Podestá, Eva Almirón 2do. Semestre 2015 Si una bacteria se divide en un segundo, transformándose en dos bacterias... ¿Cuánto tiempo tardan 1000 bacterias en convertirse en 1000 millones de bacterias?
Transcript of Guía 1A Ecuaciones Diferenciales de Primer Orden · nita depende de una única variable...

Guía 1AEcuaciones Diferenciales de Primer OrdenDiego Vallejo, Melina Podestá, Eva Almirón2do. Semestre 2015
Si una bacteria se divide en un segundo,transformándose en dos bacterias... ¿Cuántotiempo tardan 1000 bacterias en convertirse
en 1000 millones de bacterias?

Matemática III - 2◦ cuatrimestre 2015 guía 1a ecuaciones diferenciales de primer orden 2
Modelado
Biologia
Situación ^Consideremos una clase de bacterias capaces de reproducirse en un
medio adecuado. Entendemos por ello que cada célula bacteriana escapaz de dividirse, originando dos células hijas. En el gráfico, la célula Si te interesa leer más podés consul-
tar Crecimiento Bacteriano en Wiki-
pedia
madre A1 se transforma por división en un par de células B1 y B2, lascuales a su vez se dividen en C1, C2 y C3 y C4, respectivamente. Esteproceso ocurre aproximadamente a intervalos de 1 segundo para unagran población de bacterias.
t = 0 A1
''wwt = 1 B1
~~
B2
~~t = 2 C1 C2 C3 C4
· · · · · · · · · · · · · · ·
A medida que transcurre el tiempo t, varía la cantidad de bacteriasn. Supondremos que al inicio cuando t = 0, la cantidad es n = 1bacteria. Esta cantidad crece en todo instante de tiempo.
Actividad I
1. ¿Podemos considerar que n es función matemática de t? Cuál es lacondición para que lo sea? Concepto previo: Función Matemática
2. ¿Cuál es el dominio de n(t)? Concepto previo: Dominio de una función
3. ¿Podrías dibujar una gráfica de esta función n(t) aproximadamen-te?
4. La siguiente tabla da algunos valores de la función n(t). La variablen es la cantidad de bacterias medidas en miles de bacterias, y eltiempo t se mide en segundos. Completen la tabla. ¿Cuánto valdrán(4)?
5. ¿Recuerdan el cociente incremental de Matemática I? ¿Pueden ubi-car dicho cociente en la tabla?
6. Cuando el denominador del cociente incremental (en este caso ∆t)se hace muy pequeño, el cociente se aproxima a un importante con- Concepto previo: Derivada como límite del
cociente incremental
2 /14

Matemática III - 2◦ cuatrimestre 2015 guía 1a ecuaciones diferenciales de primer orden 3
t n(t) ∆n = n(t f )− n(ti) ∆t = t f − ti ∆n/∆t
0 1 n(1)− n(0) = 2− 1 = 1 1− 0 =n(1)− n(0)
1− 0= 1
1 2 n(2)− n(1) = 2− 1 =
2 4
3 8
... ...
t
Cuadro 1: Crecimiento Bacteriano
cepto. ¿Cuál es?
7. ¿Existe el valor de esta función para t = 1,5? ¿Porqué no podría va-ler 10000 ni tampoco 1500 ? Dé una cota inferior y una cota superiorpara n(1,5). ¿Qué relación tiene esto con el crecimiento o decreci-miento de la función?
Ahora consideraremos que podemos trazar una curva suave ycontinua que contenga a los puntos de la función n(t). En lo quesigue, supondremos que existe la derivada n′(t) de la función n(t)con respecto al tiempo y que aproximadamente equivale al cocienteincremental para ∆t pequeño.
8. Vuelvan a mirar la tabla, hay alguna relación entre la columna n(t)y la columna del cociente incremental ∆n/∆t ?
9. En muchos procesos de crecimiento o de decrecimiento, es una leyBiológica que:
En una colonia de bacterias, mientras exista un medio adecuado parasu crecimiento, la razón de cambio de la cantidad de individuos n′(t),es proporcional a la cantidad de células n(t) en cada instante t".
Escribiremos esto así:
n′(t) = k.n(t) (1)
donde la constante de proporcionalidad k es un número real.
10. ¿Cuánto vale k en esta situación de Crecimiento Bacteriano?
11. En general, a) ¿Qué pasaría si k = 0? Escriban la ecuación (1). Eneste caso ¿Cuánto vale n′(t)? ¿qué pasa con la función n(t)?
b) ¿Y si k > 0?c) ¿Y si k < 0?¿Qué relación tiene esto con el signo de n′(t) y con el crecimiento Concepto previo: Signo de la derivada y
crecimiento de la función
3 /14

Matemática III - 2◦ cuatrimestre 2015 guía 1a ecuaciones diferenciales de primer orden 4
y decrecimiento de n(t)?
12. Supondremos que existe n′′(t), la derivada segunda de n(t). Deri-ven con respecto a t la ecuación anterior.
13. ¿Qué signo tiene n′′(t)? Consideren los tres casos a), b) y c) yaestudiados del signo de k. ¿Qué pueden deducir de la función n(t)a partir de conocer el signo de su derivada segunda?
14. Tracen tres gráficas de n(t) para cada caso, a), b) y c) basados enla información obtenida anteriormente.
Definiciones
Podemos observar que n′(t) = k.n(t) es una igualdad entre funcio-nes que contiene la derivada de una función desconocida n(t). Aquílo que estamos buscando es una o varias funciones que satisfagan laecuación anterior.
¿Qué significa satisfacer una ecuación?Recordemos que hasta ahora hemos visto ecuaciones que no con-
tienen derivadas, a las cuales denominamos ecuaciones algebraicas. Lasolución a una ecuación algebraica es un número, o un conjunto denúmeros que reemplazados en la ecuación en cuestión, la conviertenen una igualdad. Por ejemplo, x1 = 1 es solución de
x2 − 4x + 3 = 0
dado que si reemplazamos dicho valor en la ecuación,queda 12 − 4 · 1 + 3 = 0, o sea obtenemos una igualdad.
Ejercitación �
1. Para la ecuación anterior ¿x = 3 es solución? ¿Porqué x = 0 no essolución?
2. Den algún ejemplo de ecuación algebraica que no posea soluciónpara x real?
3. ¿cuántas soluciones posee la ecuación sin(x) = 0
Llamaremos ecuaciones diferenciales a las que contienen deriva-das. La importancia de las ecuaciones de esta naturaleza reside ensu aplicación a múltiples áreas del conocimiento: desintegración ra-diactiva, crecimiento de poblaciones, reacciones químicas, problemasgravitatorios, modelos económicos.
4 /14

Matemática III - 2◦ cuatrimestre 2015 guía 1a ecuaciones diferenciales de primer orden 5
Resolver una ecuación diferencial es encontrar una o más funcio-nes que junto con sus derivadas satisfagan la ecuación dada. A estasfunciones las llamaremos soluciones.
Por ejemplo la ecuación diferencial
y′ = y/x (2)
admite como solución a la función y(x) = 3x dado que derivandoy′(x) = 3 y reemplazando,
3 = 3x/x
se verifica la ecuación.
Ejercitación �
Para la ecuación diferencial (2)
1. ¿y = −x es solución?
2. ¿Por qué y = cos(x) no es solución?
3. Suponiendo que k es un número real fijo cualquiera, y(x) = k.x ¿essolución? ¿cuántas soluciones hay entonces?
Notemos que esta última solución y(x) = k.x contiene a las anteriores,y = −x, y = x, y = 3x ... como casos particulares. Por este moti-vo denominaremos a y(x) = k.x solución general, que incluye unaconstante arbitraria. A cada una de las infinitas funciones y = −x,y = x, y = 3x... (que se obtienen de la solución general seleccionan-do un valor particular de la constante k) las llamaremos solucionesparticulares. A este conjunto de infinitas funciones, también podre-mos denominarlo familia de funciones. Notemos que hay una solaconstante k en la solución y(x) = k.x, y que la mayor derivada en laecuación diferencial y′ = y/x es una derivada primera y′.
Ejercitación �
1. Verifica que las siguientes funciones son soluciones de las ecuacio-nes diferenciales dadas.
a) y(x) = e− sin(x), para y′ + cos(x)y = 0
b) y(x) = sen(x)− 1, para y′ + cos(x)y = sen(x) cos(x)
c) y(x) = c1ex + c2, para y′′ − y′ = 0
(En este caso la solución contiene dos constantes c1 y c2, y la ma-yor derivada en la ecuación diferencial es una derivada segunda)
d) y(x) = sen(2x), para y′′ + 4y = 0.
5 /14

Matemática III - 2◦ cuatrimestre 2015 guía 1a ecuaciones diferenciales de primer orden 6
e) y(x) = c1 sen(kx) + c2 cos(kx), para y′′ + k2y = 0.
En matemática I y II, ya hemos resuelto ecuaciones diferenciales.Por ejemplo, cuando buscamos mediante antiderivación una funcióncuya derivada es la función coseno. Esto puede escribirse como la ecua-ción diferencial y′ = cos(x). Al igual que en el ejemplo anterior, nohay una única función solución, sino una solución general de la formay = sin(x) + C, donde C es una constante real arbitraria. Este proce-dimiento sirve para toda ecuación de la forma y′ = f (x), es decir, quepuedo despejar y′ y no contiene a la variable y.
−2π −π 0 π 2π
−3
0
3
6
x
y
Soluciones de y′ = cos(x)
Ejercitación �
Basado en tu conocimiento de la función y = sin(x), en el gráficoanterior,
1. ¿cuál curva corresponde al valor de la constante C = 0?
2. ¿cuál para C = 3?
3. ¿hay alguna para C = 20?
4. ¿cuál pasa por el punto (0, 6)?
La última respuesta es la gráfica de la función y(x) = sin(x) + 6.Esta función verifica la ecuación diferencial y′ = cos(x) y a la veztambién verifica la condición y(0) = 6. A dicha condición la llama-remos condición inicial. Mirando la gráfica podemos comprobar quey(x) = sin(x)− 3 resuelve la ecuación y′ = cos(x) y cumple la condi-ción inicial y(π) = −3
Cada una de las funciones graficadas anteriormente, será una solu-ción particular de la ecuación diferencial que cumplirá una particular
6 /14

Matemática III - 2◦ cuatrimestre 2015 guía 1a ecuaciones diferenciales de primer orden 7
condición inicial.
↪→ Definición
Un problema con valor inicial (PVI) es el conjunto de una ecuacióndiferencial junto con una condición inicial.y′ = f (x, y)
y(x0) = y0(3)
donde f (x, y) es una expresión que puede contener a x y a yUna solución de un PVI es una función h(x) que satisface al mismo
tiempo la ecuación diferencial y la condición inicial.
Reemplazando en y′ = f (x, y) debe verificarse la igualdad h′(x) =f (x, h(x)) y debe verificarse reemplazando en y(x0) = y0 que: h(x0) =
y0. La gráfica de la función solución h(x) debe pasar por el punto(x0, y0):
x0
y0
x
y
Función solución h(x)
Ejercitación �
Resuelva los siguientes problemas con valor inicial (utilizando elmétodo de antiderivación):
1. y′ + 2x = 2, y(0) = 1
2. xy′ + xex = 0, y(1) = e
3. y′ + 2 sen(2x) = 0 y(π/2) = 1
Clasificación
Clasificaremos las ecuaciones diferenciales por tres criterios: tipo,orden y grado.
↪→ Definición
Una ecuación diferencial será ordinaria (EDO) si la función incóg-nita depende de una única variable independiente, o será una ecua-
7 /14

Matemática III - 2◦ cuatrimestre 2015 guía 1a ecuaciones diferenciales de primer orden 8
ción diferencial parcial (EDP) si la función incógnita depende de doso más variables independientes. En este último caso, la EDP contienederivadas parciales.
Ejemplo 1
Son ejemplos de ecuaciones diferenciales ordinarias: Dos formas de escribir la derivada pri-
mera: y′(x) ≡ dydxdy
dx+ y = ex
Asimismo: y′′(x) =d2ydx2d2y
dx2 −dydx
+ 3y = 0
Son ejemplos de ecuaciones diferenciales parciales:la Ecuación de onda
∂2y∂t2 = a2 ∂2y
∂x2
donde a ∈ R
la Ecuación de difusión
∂u∂t
= h2 ∂2u∂x2
donde h ∈ R
↪→ Definición
El orden de una ecuación diferencial es orden de la derivada deorden más alto que aparece en la ecuación diferencial.
Ejemplo 2:
d2ydx2 + 2
(d2ydx2
)3
+ 6y = sen(x)
es una EDO de 2° orden
3xdydx
+ 2y2 = x
es una EDO de 1° orden.
Ejercitación �
1. Halle el orden de cada una de las ecuaciones diferenciales del ejem-plo 1.
2. Halle el grado de cada una de las ecuaciones diferenciales del ejem-plo 1 y del 2.
8 /14

Matemática III - 2◦ cuatrimestre 2015 guía 1a ecuaciones diferenciales de primer orden 9
Método 1: Separación de Variables
Este método se aplica a algunas ecuaciones diferenciales ordinariasde primer orden. Comencemos con un ejemplo. Consideremos la ecua-ción:
dydx
= x2y
multipliquemos por el diferencial dx
dydx
dx = x2y dx
Recordemos que el miembro derechodydx
dx = dy
dy = x2y dx
Ahora dividimos la ecuación por la variable y, así pasa al lado izquier-do
1y
dy︸︷︷︸no contiene x
= x2 dx︸ ︷︷ ︸no contiene y
Miremos la ultima ecuación: el lado derecho sólo depende de x mien-tras que el lado izquierdo sólo depende de y. Diremos que las variablesquedaron separadas
Ahora integramos cada miembro respecto de la variable correspon-diente. ∫ 1
ydy =
∫x2dx
En la primera integral y será considerada variable independiente, y enla segunda integral la variable independiente será x. Recordando quela primitiva de 1/y es el logaritmo natural del valor absoluto de y paray > 0 o y < 0, y que la primitiva de x2 es x3/3
ln |y|+ C1 =13
x3 + C2
Aquí hay en apariencia dos constantes de integración, sin embargo noson independientes. Resto C1, y llamo C a C2 − C1
ln |y| =13
x3 + C
despejo |y| en función de x
|y| = exp (13
x3 + C)
9 /14

Matemática III - 2◦ cuatrimestre 2015 guía 1a ecuaciones diferenciales de primer orden 10
aplico potencia de una suma
|y| = exp (13
x3) exp C
llamo A = exp C, por tanto A > 0
|y| = A exp (13
x3)
permitiendo valores negativos de A:
y = A exp (13
x3)
↪→ Definición
llamaremos ecuación de variables separables a toda ecuación dife-rencial ordinaria de primer orden que pueda escribirse del siguientemodo:
f (y)y′ = g(x)
donde la función f (y) no depende de la variable x, ni la función g(x)depende de la variable y
Ejercitación �
1. En el ejemplo de la página 9 identifique la función f (y) y la funcióng(x) de la definición anterior.
2. Para cada una de las siguientes ecuaciones: i) determina la solucióngeneral (puedes seguir los pasos del ejemplo) y ii) grafica la regióndel plano xy donde está definida y′
a) y′ = x2
y
b) y′ + y2 sen(x) = 0
c) y′ = cos2(x) cos2(2y)
d)dydx
= x2
y(1+x3)
e)dydx
= x2
1+y2
Volvamos a la situación de la página 2 y resolvamos la ecuacióndiferencial.
1. Reescribamos la ecuación recordando la notación de Leibnitz de laderivada, n′(t) =
dndt
y que n = n(t) :
dndt
= k.n (4)
10 /14

Matemática III - 2◦ cuatrimestre 2015 guía 1a ecuaciones diferenciales de primer orden 11
2. Esta es una Ecuación Algebraica o Ecuación Diferencial? Es ordina-ria o parcial? cuál es su orden? Cuál es su grado? ¿Es separable?
3. Qué unidades tiene n? Qué unidades tendrádndt
? A partir de ahorasupongamos que k = 2.
4. Halle la solución particular que verifica la condición inicial n(0) = 1millón.
5. Utilizando la solución obtenida grafique n(t) en función de t.
Comparen este último gráfico con los gráficos realizados previa-mente
6. En qué se parecen? En qué se diferencian? Qué necesito para crearcada gráfico?
Retomemos ahora la pregunta inicial...¿Cuánto tiempo tardan 1000 bacterias en convertirse en 1000 millones debacterias?
11 /14

Matemática III - 2◦ cuatrimestre 2015 guía 1a ecuaciones diferenciales de primer orden 12
Enfriamiento. Modelo de Newton.
Situación ^Consideraremos una esfera de hierro que inicialmente está a una tem-
peratura T0 = 40 ◦C. Al inicio en t = 0 se la sumerge en el mar cuyatemperatura ambiente es TA = 20 ◦C. Llamaremos T = T(t) a la tem-peratura del cuerpo en el instante t. Luego de 4 segundos comproba-mos que la temperatura del cuerpo es T = 30 ◦C.
La ley de enfriamiento de Newton indica que la razón de cambio de
la temperatura del cuerpo con respecto al tiempodTdt
es proporcional ala diferencia entre la temperatura del cuerpo T y la temperatura delambiente TA (cuando la diferencia entre T y TA es lo suficientementepequeña).
T0=40
TA=20
1. Podrías hacer una gráfica de la Temperatura en función del tiempobasado en tu intuición y experiencia?
2. Cuáles de las temperaturas hasta ahora mencionadas (TA, T0 o T)varían con el tiempo? ¿Son funciones matemáticas del tiempo?
3. ¿Cómo escribe matemáticamente la diferencia entre la temperaturadel cuerpo T y la temperatura del ambiente TA ?
4. ¿Cómo se escribe matemáticamente quedTdt
es proporcional a ladiferencia que escribieron en el item anterior?
Si todo anduvo bien, en estos momentos tendrás en tu hoja algoparecido a esto:
dTdt
= k.(T − 20) (Ley Newton)
donde k es una constante numérica.
12 /14

Matemática III - 2◦ cuatrimestre 2015 guía 1a ecuaciones diferenciales de primer orden 13
5. ¿Qué unidades tiene k?
6. Podría ocurrir que...
a) k = 0 ?
b) k < 0 ?
c) k > 0 ?
Tal como lo hicieron en el primer modelo (página 3) realicen unestudio de la función T(t) mediante el análisis del signo de T′(t)y de T′′(t) (crecimiento/decrecimiento, concavidad) y realicen ungráfico de T(t)
7. Basado en lo anterior, explique cuál de las siguientes gráficas puederepresentar la solución T(t).
0 2 4 6 810
20
30
40
t
T(t)
T1
0 2 4 6 810
20
30
40
t
T2
0 2 4 6 810
20
30
40
t
T(t)
T3
0 2 4 6 810
20
30
40
t
T4
8. Halla la solución general de la ecuación diferencial
9. Halla la solución particular que satisface la condición inicial T(0) =T0 = 40
10. Halla la constante k que verifica la segunda condición: "Luego de4 segundos comprobamos que la temperatura del cuerpo es T =
30 ◦C"
13 /14
Matemática III - 2◦ cuatrimestre 2015 guía 1a ecuaciones diferenciales de primer orden 14
Mapa Conceptual
Ecuaciones Di-ferenciales
Modelado/Biología
Definiciones/Clases
Ecuacionesde 1er.Orden.
Separaciónde Variables
Modelado/Newton
14 /14

Guía 1-BEcuaciones Diferenciales de Primer OrdenDiego Vallejo, Melina Podestá, Eva Almirón2do. Semestre 2015
¿Cuál es la curva del plano que, en todopunto (x, y) por donde pasa, su pendiente es
x + y ?

Matemática III - 2◦ cuatrimestre 2015 guía 1-b ecuaciones diferenciales de primer orden 2
Método 2: Ecuaciones diferenciales Ordinarias de 1º orden linea-les
Queremos resolver la ecuación y′ + y = ex, con la condición inicialy(0) = 1.
Vean que no es posible escribirla en forma separable.La resolveremos por otro método en el siguiente ejemplo.
Ejemplo
Primero: Suponer que y = u.v
y′ + y = ex
Reemplazaremos la función y(x) que estamos buscando por unproducto de dos funciones u y v, o sea y = u.v. Derivemos elproducto uv y obtendremos: y′ = u′.v + u.v′. Reemplazando:
y′︷ ︸︸ ︷u′.v + u.v′ +
y︷︸︸︷u.v = ex
sacamos factor común u entre u.v′ y u.v
u′.v + u(v′ + v) = ex (Ecuación 1)
Segundo: Buscar v Este método nos permite hallar ymediante la búsqueda sucesiva dedos funciones u y v. Aceptaremos quepara cualquier Ecuación Diferencial deprimer orden lineal es posible hacereste proceso.
Veamos que si se anula v′ + v, la (Ecuación 1) se simplifica enor-memente, por lo tanto, buscaremos una función v que no sea cero, ycumpla que v′ + v = 0. O sea queremos que:
v′(x) = −v(x)
dvdx
= −v
la ecuación anterior es separable, y entonces∫ 1v
dv =∫−dx
ln v = −x + C
como es suficiente con una sola función v(x), elijo de todas, la mássencilla haciendo C = 0
ln v = −x
y despejando v
v = e−x (Resultado 1)
Hemos hallado una función v.
2 /4

Matemática III - 2◦ cuatrimestre 2015 guía 1-b ecuaciones diferenciales de primer orden 3
Tercero: Hallar u.Volvamos a la Ecuación 1, y reemplazamos:
u′.v + u
=0︷ ︸︸ ︷(v′ + v) = ex
u′.e−x + 0 = ex
u′ = ex/e−x
recordando reglas de los exponentes:
u′ = e2x
u =∫
e2xdx
u =12
e2x + C (Resultado 2)
Cuarto: Multiplicar u.vEn este punto el Resultado 1 y el Resultado 2 nos dan u y v. Re-
cordando que y = u.v, nos queda la solución de la EcuaciónDiferencial y′ + y = ex:
−1 1
1
2
3
Familia de Curvas (Solución General)
yG =12
ex + Ce−x . Aquí se grafican sólo
tres curvas solución (hay infinitas).
−1 1
1
2
3
De la Solución General se pue-de obtener una Solución Particularyp =
12
ex +12
e−x que verifica la condi-
ción: y(0) = 1. Esa solución particulares única.
y =
u︷ ︸︸ ︷(12
e2x + C)
.
v︷︸︸︷e−x
y =12
e2xe−x + Ce−x
y =12
ex + Ce−x (Solución General)
Como la Ecuación es de Primer Orden, la Solución General contie-ne 1 (igual al Orden!) Constante Indeterminada C.
Apliquemos la condición inicial y(0) = 1:
1 =12
e0 + Ce−0
1 =12× 1 + C× 1
1− 12
= C
C =12
y reemplazando C en la solución general:
y =12
ex +12
e−x (Solución Particular)
queda resuelta la ecuación con la condición inicial.
3 /4

Matemática III - 2◦ cuatrimestre 2015 guía 1-b ecuaciones diferenciales de primer orden 4
↪→ Definición
llamaremos ecuación diferencial de primer orden lineal a todaecuación diferencial ordinaria de primer orden que pueda escribirsedel siguiente modo:
y′ + a(x)y = b(x)
Donde a(x) y b(x) son funciones de la variable x.Para simplificar la notación, podremos llamar a = a(x) y b = b(x).
Ejercitación �
1. Identifica las funciones a = a(x) y b = b(x), encuentra la solu-ción general de las siguientes ecuaciones diferenciales lineales deprimer orden.
a) y′ + 6y = 3ex
b) y′ − 2y = 1
En este caso y en el mismo sistema de ejes cartesianos xy:
1) grafica la función solución particular y(x) para la constanteC = 1,
2) grafica la función solución particular y(x) para C = −1.
3) ¿Habrá alguna solución que no sea una función exponencial?¿para qué valor de C? si la encontrás graficala también. ) Concepto previo: Función exponencial
c) y′ − 2y = x2 + xd) y′ + 2xy = x
2. Resuelve los siguientes PVI:
a) y′ + 6y = 3ex, con y(1) = 0
En este caso grafica la solución. Podés utilizar una computadora Podés consultar www.symbolab.com owww.wolframalpha.comy copiar a mano el dibujo a un papel
b) y′ − 2y = x2 + x , con y(1) = 1/2
Y retomando la pregunta inicial ...¿Cuál es la curva del plano que, en todo punto (x, y) por donde pasa, supendiente es x + y ?
4 /4

Guía 1CCampos de Pendientes y Método de EulerDiego Vallejo, Melina Podestá, Eva Almirón2do. Semestre 2015
¿Cómo funciona el método de datación delcarbono 14?

Matemática III - 2◦ cuatrimestre 2015 guía 1c campos de pendientes y método de euler 2
Campos de Pendientes.
En las ecuaciones de los ejercicios anteriores la derivada y′ pue-de despejarse de tal modo que del miembro derecho tendremos unafunción que puede depender de dos variables, x e y: Concepto previo: Función de dos variables.
Pregunta: ¿En qué conjunto numérico(N, Z, Q, R, R2 o R3) está el dominiode la función f (x, y) ? ¿Cómo hacés paradarte cuenta?
y′ = f (x, y) (1)
Concepto previo: Dominio.Concepto previo: Conjunto Numérico.
En castellano, esta ecuación quiere decir que la función f (x, y) nosdevuelve el valor de y′, es decir de la pendiente de la recta tangente dela gráfica de la función solución y(x) en cada punto (x, y) del plano. Concepto previo: Derivada como pendiente
de la recta tangenteTanto a la función f (x, y) como a su gráfica en R2 la llamaremosCampo de Pendientes o Campo de Inclinaciones.
Leonhard Euler
¿Cuál es el motivo por el cual hay unaimagen de Euler en esta guía?
Toda ecuación diferencial de primer orden donde pueda despejar y′
admite un Campo de pendientes.Veremos que puede ser útil a la hora de resolver estas Ecuaciones.
Ejemplo
Sea la Ecuación Diferencial y′ = 2.¿Cuál es su Campo de pendientes f (x, y)?Comparándola con la ecuación (1) vemos que f (x, y) = 2.Esto quiere decir que en cualquier punto del plano, la pendiente
de la recta tangente valdrá 2 unidades. Para cada punto del planopodemos graficar una pequeña porción de dicha recta tangente.
−2 −1 0 1 2−2
−1
0
1
2
Campo de Pendientes de y′ = 2
Actividad I
Consideremos la Ecuación Diferencial y′ = x− y.En cualquier punto del plano, la pendiente de la recta tangente será
igual a la diferencia entre su ordenada y y su abscisa x. Por ejemplo en(0, 0) la pendiente de la recta tangente valdrá cero. También será asíen todos los puntos donde x = y. Para construir el gráfico del campo
2 /12

Matemática III - 2◦ cuatrimestre 2015 guía 1c campos de pendientes y método de euler 3
de pendientes, primero completen la siguiente tabla de la función dedos variables f (x, y) = x− y
x = −2 x = −1 x = 0 x = 1 x = 2y = −2 −2− (−2) = 0 −1− (−2) = 1 2y = −1y = 0y = 1y = 2 Cuadro 1: Valores de la función f (x, y) =
x− yCon la tabla verifiquen que el siguiente gráfico es el campo de pen-dientes buscado:
−2 −1 0 1 2−2
−1
0
1
2
Campo de Pendientes dedydx
= x− y
Basados en el gráfico anterior:
1. ¿Podría la curva solución y(x) tener pendiente negativa en el punto(1, 0)? ¿podría tener pendiente positiva en el punto (0, 1) ?
2. La línea punteada es la gráfica de la recta y = x. ¿Qué relación tieneesta recta con el campo de pendientes del gráfico?
3. Puede la curva solución y(x) cortar (por ejemplo como la línea pun-teada) a los pedacitos de rectas tangentes dibujados allí?
Porciones de rectas tangentes como soluciones y(x)
P
Gráfico de una función solución y(x) ysu recta tangente en P(a, b). Dentro de lalínea punteada la línea recta aproxima ala línea curva.
Para ver qué relación hay entre la solución y(x) de la ecuación dife-rencial y el campo de pendientes f (x, y), recordemos de Matemática Ique la recta tangente a una función f (x) en un punto (a, b) aproximaa la función en la vecindad cercana de (a, b), como vemos en la gráficade la derecha.
3 /12

Matemática III - 2◦ cuatrimestre 2015 guía 1c campos de pendientes y método de euler 4
Entonces, poseer una porción pequeña de recta tangente es poseeraproximadamente una porción de solución en la vecindad del punto.
Ejemplo
Tenemos un campo de pendientes f (x, y) y deseamos trazar la cur-va solución y(x) del PVI que pasa por el punto (1, 3/2). El campo Notemos que y(x) es la curva solución
del siguiente PVI:{y′ = f (x, y)y(1) = 3/2
de pendientes está graficado en los puntos (1, 1) y (1, 2). Graficare-mos en línea punteada una porción de recta tangente en el punto deinterés (1, 3/2) que sea aproximadamente paralela a las porciones detangentes de los (1, 1) y (1, 2). Luego la curva solución debe ser apro-ximadamente igual a la linea punteada para puntos muy cercanos alpunto de interés (1, 3/2).
Veamos esto en la siguiente figura:
Ejercitación �
1. Sea el problema de valor inicialy′ = x2 + y2
y(0) = 1
cuya solución es la función y(x) desconocida. Pistas: ¿qué pasa con el signo de la de-rivada y el crecimiento de la funcion?¿Puede trazar el Campo de Pendientes?¿Cómo graficaría la condición inicial?
a) Sin resolver la Ecuación Diferencial, dé algún motivo por elcual las siguientes no pueden ser las gráficas de la función solucióny(x).
4 /12

Matemática III - 2◦ cuatrimestre 2015 guía 1c campos de pendientes y método de euler 5
−5 0 50
10
20
30
x
y
Y1
−5 0 5
3
4
5
x
y
Y2
b) Grafique el campo de pendientes en el siguiente gráfico ¿ayudaesto para responder las preguntas previas?
−2 −1 0 1 2−2
−1
0
1
2
Campo de Pendientes dedydx
= x2 + y2
2. Consideremos el siguiente
PVI-1 :
y′ = x− y
y(0) = 1
llamaremos y1(x) a su solución. Su campo de pendientes (segúnla actividad anterior) es:
−2 −1 0 1 2−2
−1
0
1
2
Campo de Pendientes dedydx
= x− y
5 /12

Matemática III - 2◦ cuatrimestre 2015 guía 1c campos de pendientes y método de euler 6
a) Dada la condición inicial y(0) = 1, la curva solución y1(x)debe pasar por un punto P0 del plano. ¿Cuáles son las coordenadasdel punto P0? Márquelo en el gráfico.
b) Para graficar la solución y1(x): dibuje una línea que comienceen P0 y que por cada punto que pase sea coincidente o “paralela” alos pequeños tramos de rectas tangentes. Compare su resultado conel de otros compañeros.
c) Basado en esa gráfica ¿podría estimar el valor de y1(1) y dey1(2)?
d) En el mismo gráfico, repita los items a) y b) en color rojo parala solución y2(x) de:
PVI-2 :
y′ = x− y
y(0) = −2
y en color verde para la solución y3(x) :
PVI-3 :
y′ = x− y
y(−2) = −1
¿Qué puede observar de las soluciones?e) Las gráficas de y1(x) y de y2(x) ¿se pueden cortar? (es decir,
habría un punto P(a, b) del plano que pertenezca a ambas? ¿y sepodrán cortar las gráficas y1(x) y de y3(x)? ¿Podrías dar un argu-mento que fundamente tu respuesta?
3. Sea una ecuación diferencial de primer orden y′ = f (x, y) cualquie-ra. Basado en lo discutido en el punto 2 e), ¿se podrían cortar lasgráficas de dos soluciones particulares diferentes?
Los siguientes ejercicios, podés calcularlos a mano, o mediante in-ternet o como lo desees. (¿Habrá generadores de Campos de pen-dientes en internet? ¿Cómo los encontrarías?)
4. Graficá el campo de pendientes de y′ = x sen(y)Utilizalo para resolver gráficamente en un único dibujo (trazá la
curva):a) y′ = x sen(y)
y(0) = 0
b) y′ = x sen(y)
y(0) = 1
6 /12

Matemática III - 2◦ cuatrimestre 2015 guía 1c campos de pendientes y método de euler 7
c) y′ = x sen(y)
y(0) = π
d) y′ = x sen(y)
y(0) = 4
e) Cuál de los ítems anteriores dirías que es una solución de equi-librio?
f) ¿Podés hallar la solución general yG(x) de la ecuación diferen-cial y′ = x sen(y) haciendo cuentas?
¿Podrías utilizar esta solución para verificar o comprobar de al-gún modo lo que obtuviste gráficamente en los puntos a), b), c), d)?
5. Ejercicios donde deban trazar a mano, el campo de pendientes,
y ubicar el punto de la condicion inicial en el gráfico y a
partir de ese punto estimar la solución de la ED.
Método 3: Euler
¿Cómo sería realizar lo que hicimos hasta ahora en esta guía me-diante cálculos en vez de hacerlo gráficamente?
El método de Euler nos permite construir una aproximación a lasolución de un PVI por medio de una línea poligonal compuesta poruna sucesión de rectas tangentes. Nos introduciremos a este métodomediante el siguiente
Ejemplo
Consideremos el siguiente PVIy′ = x + y
y(0) = 1
Iteración 1 Ignoramos cuál es la función y(x), aunque algo de ellasabemos: su valor para x = 0. Reemplazándolo en la ecuación dife-rencial obtendremos el valor de la derivada, o sea, la pendiente dela recta tangente en ese punto: Concepto previo: Recta Tangente
y′ = x + y
7 /12

Matemática III - 2◦ cuatrimestre 2015 guía 1c campos de pendientes y método de euler 8
reemplazando x = 0, donde y(0) = 1
y′(0) = 0 + y(0)
y′(0) = 1
¿Cuál es la ecuación de una recta sabiendo que pasa por el punto(0, 1) y su pendiente es m = 1? Concepto previo: Ecuación punto-
pendiente de una recta
y− y0 = m(x− x0)
y− 1 = 1(x− 0)
y = x + 1 Ecuación de la recta
Sabemos que para valores cercanos al punto (0, 1) la recta tangenteaproxima a la función y(x) (lo vimos en la página 3). Por lo tantotenemos que una pequeña porción (cuanto más pequeña mejor) dela recta tangente “es” aproximadamente la solución en esos valores.
¿Qué tan grande puede ser la porción de recta tangente? Veamos,probemos!
0 1 2 3
0
2
4
6
8
x
y
Iteración 1
Llamaremos paso h a este intervalo que suponemos válida dichaaproximación. Tomaremos el paso en este caso igual a 1: h = 1.Grafiquemos esa porción de recta desde x = 0 hasta x = 0 + h = 1.
Vemos que esa "solución"siguiendo la recta tangente nos da quepara x = 1 la función y = 2, o sea y(1) = 2, lo cual es una nuevacondición “inicial".
Iteración 2 Ahora en el punto (1, 2) podemos calcular la pendientenuevamente repitiendo lo que hicimos en la ecuación diferencial.
0 1 2 3
0
2
4
6
8
x
yIteración 2
Cálculo de la pendiente:
y′ = x + y
y′(1) = y(1) + 1
y′(1) = 2 + 1 = 3
La ecuación de la tangente:
y− y0 = m(x− x0)
y− 2 = 3(x− 1)
y = 3x− 1
Iteración 3 El último segmento termina en el punto cuya x = 2 + h =
2 + 1 = 3 y la coordenada y = 3.x − 1 = 3,2− 1 = 5 o sea en elpunto (2, 5). Repetimos:
0 1 2 3
0
2
4
6
8
x
y
Iteración 3
Cálculo de la pendiente:
y′ = x + y
y′(1) = 2 + y(2)
y′(1) = 2 + 5 = 7
La ecuación de la tangente:
y− y0 = m(x− x0)
y− 5 = 7(x− 2)
y = 7x− 9
8 /12
Matemática III - 2◦ cuatrimestre 2015 guía 1c campos de pendientes y método de euler 9
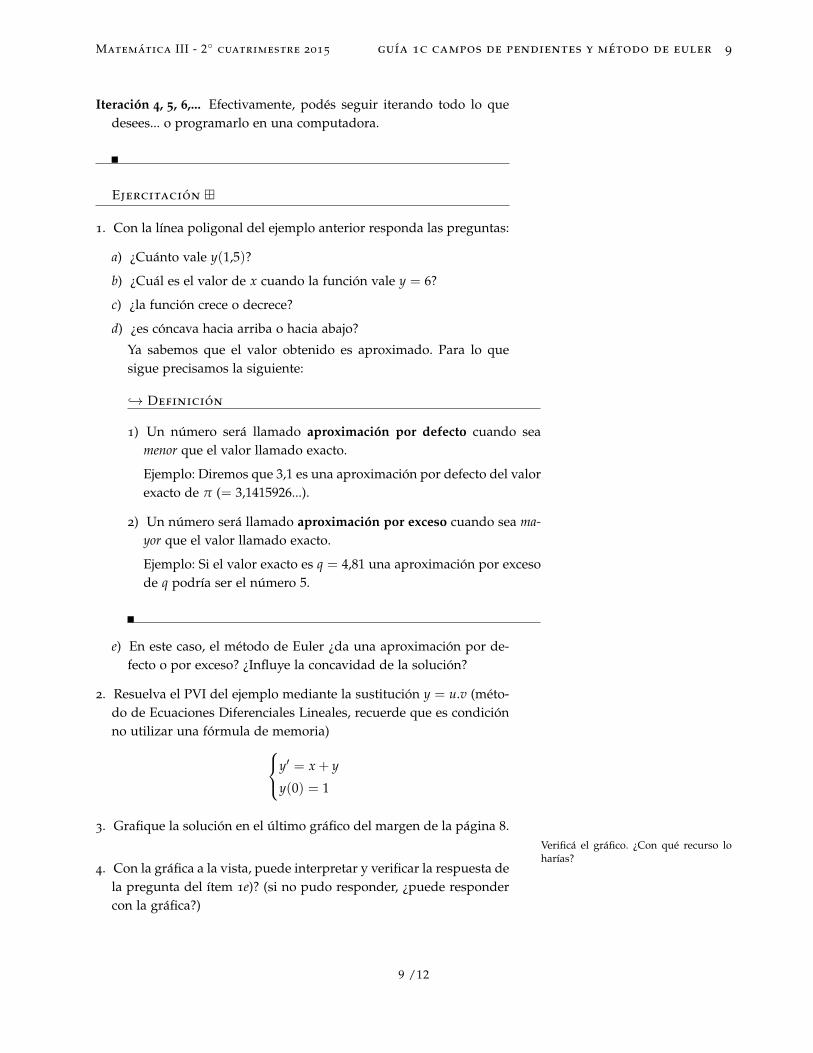
Iteración 4, 5, 6,... Efectivamente, podés seguir iterando todo lo quedesees... o programarlo en una computadora.
Ejercitación �
1. Con la línea poligonal del ejemplo anterior responda las preguntas:
a) ¿Cuánto vale y(1,5)?
b) ¿Cuál es el valor de x cuando la función vale y = 6?
c) ¿la función crece o decrece?
d) ¿es cóncava hacia arriba o hacia abajo?
Ya sabemos que el valor obtenido es aproximado. Para lo quesigue precisamos la siguiente:
↪→ Definición
1) Un número será llamado aproximación por defecto cuando seamenor que el valor llamado exacto.
Ejemplo: Diremos que 3,1 es una aproximación por defecto del valorexacto de π (= 3,1415926...).
2) Un número será llamado aproximación por exceso cuando sea ma-yor que el valor llamado exacto.
Ejemplo: Si el valor exacto es q = 4,81 una aproximación por excesode q podría ser el número 5.
e) En este caso, el método de Euler ¿da una aproximación por de-fecto o por exceso? ¿Influye la concavidad de la solución?
2. Resuelva el PVI del ejemplo mediante la sustitución y = u.v (méto-do de Ecuaciones Diferenciales Lineales, recuerde que es condiciónno utilizar una fórmula de memoria)y′ = x + y
y(0) = 1
3. Grafique la solución en el último gráfico del margen de la página 8.Verificá el gráfico. ¿Con qué recurso loharías?
4. Con la gráfica a la vista, puede interpretar y verificar la respuesta dela pregunta del ítem 1e)? (si no pudo responder, ¿puede respondercon la gráfica?)
9 /12
Matemática III - 2◦ cuatrimestre 2015 guía 1c campos de pendientes y método de euler 10
5. Ahora con la gráfica de la solución exacta a la vista, responda laspreguntas del item 1.
6. Para mejorar la aproximación podemos tomar una porción menor delas rectas tangentes. Suponga que el paso ahora es h = 0,5, repita elprocedimiento.
a) Cómo quedaría el último gráfico (iteración 3)? ¿Podría utilizarese gráfico para responder las preguntas del item 1? ¿Porqué sí oporqué no?
b) Qué cambios nota con h = 0,5 con respecto a h = 1?
c) Podría implementarlo, por ejemplo en una hoja Excel? ¿Cómosería que todo quede automatizado? ¿Qué recursos podés utilizar para averi-
guar sobre el método de Euler para re-solver PVI con Ecuaciones Diferencialesde 1er Orden? Por ejemplo, el Stewart“Cálculo de una variable” en el capítu-lo 9. O qué videos de youtube? O quéotro recurso? Si te enterás de algo nue-vo, ¿podés compartirlo en el grupo?
d) ¿Cuál sería el mínimo de datos que precisaría tu Excel para quedevuelva el valor de la función solución y(x) para cualquier valorde x dado?
Si no tiene Excel, puede utilizar un sustituto? Cuál? ¿Si lo hizopuede compartirlo en facebook? Si no lo querés hacer, ¿sabés cuáles tu motivo para no hacerlo? Y ¿cuál es el impacto de decidir síhacerlo o de decidir no hacerlo?
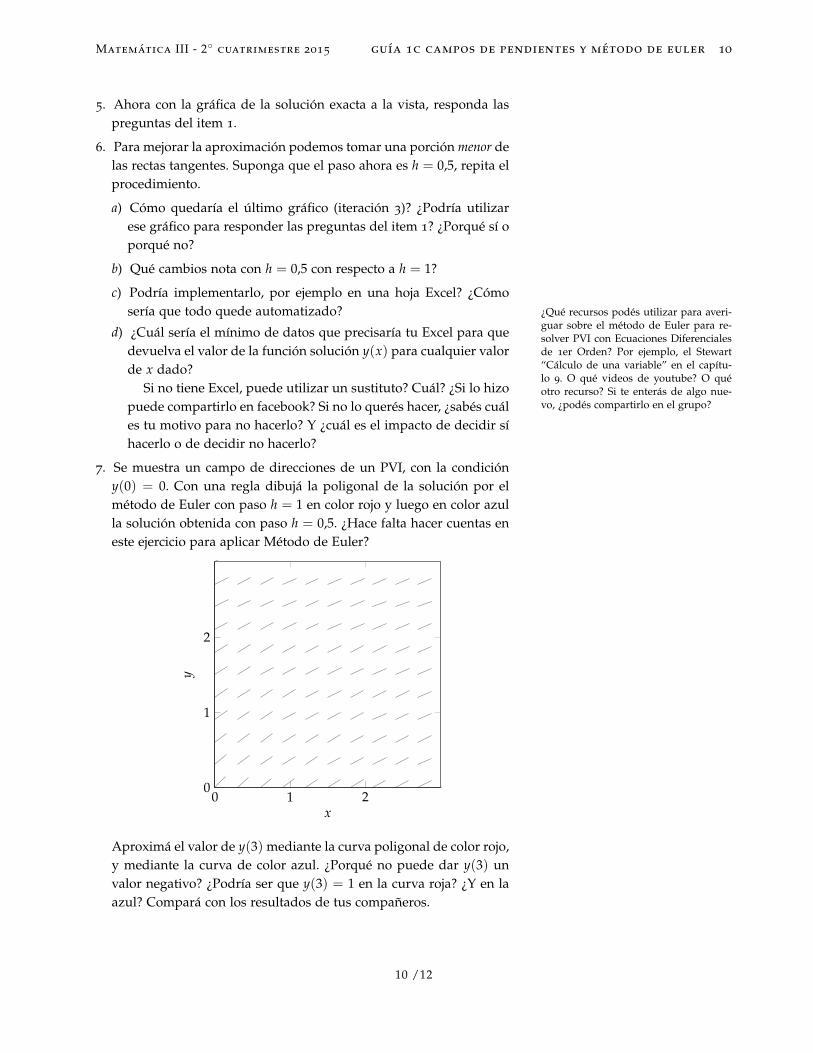
7. Se muestra un campo de direcciones de un PVI, con la condicióny(0) = 0. Con una regla dibujá la poligonal de la solución por elmétodo de Euler con paso h = 1 en color rojo y luego en color azulla solución obtenida con paso h = 0,5. ¿Hace falta hacer cuentas eneste ejercicio para aplicar Método de Euler?
0 1 20
1
2
x
y
Aproximá el valor de y(3) mediante la curva poligonal de color rojo,y mediante la curva de color azul. ¿Porqué no puede dar y(3) unvalor negativo? ¿Podría ser que y(3) = 1 en la curva roja? ¿Y en laazul? Compará con los resultados de tus compañeros.
10 /12

Matemática III - 2◦ cuatrimestre 2015 guía 1c campos de pendientes y método de euler 11
8. En caso del ítem anterior (item 7) ¿El método de Euler dá aproxima-ciones por defecto o por exceso? Para resolver esta pregunta ¿tieneimportancia el crecimiento o decrecimiento de la solución aquí? ¿tie-ne importancia la concavidad? ¿Qué podrías graficar en el mismográfico para averiguarlo?
9. la función campo de direcciones que está graficada en el ítem 7 esf (x, y) = 1/
√x + y + 1 ¿pueden verificar sus respuestas de ítem
anterior mediante algún método exacto? ¿Pueden verificarlo me-diante otro recurso?
10. Circuito RC: Consideremos un circuito eléctrico con una batería Ede 60 Volt, un Capacitor C de 0,05 Faradios, una resistencia R de 5Ohm.
Cuando se cierra la llave T, comienza a circular una Corriente Ique es el flujo de Carga Q a través de el cable. La carga varía conel tiempo: Q = Q(t), y su derivada es precisamente la corrienteI = Q′(t).
E
C
R
T
Según la ley de Kirchoff: ¿Qué es esa Ley? ¿En qué rama de laciencia está formulada?
R.I +1C
Q = E
RQ′ +1C
Q = E
5Q′ +1
0,05Q = 60
a) La última ecuación... ¿es una Ecuación Diferencial? ¿Qué ordentiene? Es lineal? Es separable? Podés resolverla?
b) ¿Cuál es la función solución (qué nombre tiene en electricidad)?¿Qué nombre recibe en electricidad la derivada de la solucióncon respecto al tiempo?
c) ¿Cuál es la función campo de direcciones? ¿Podrías graficarla?
d) Mirando dicha gráfica qué pasa con la función Q(t)? Suponga-mos que Q(0) = 0, qué ocurre con la función q(t) a medida quepasa el tiempo t? Para t→ ∞ qué pasa con Q(t)?
e) ¿Podrías calcular la función corriente I = I(t)?
11 /12

Matemática III - 2◦ cuatrimestre 2015 guía 1c campos de pendientes y método de euler 12
f ) ¿Hace falta saber algo de electricidad para resolver esta situa-ción? Qué relación tiene este problema con el siguiente PVI:
5y′ +1
0,05y = 60
¿Importa cómo se llame la función incógnita?
¿Cuál es la relación de la pregunta inicial:
¿Cómo funciona el método de datación del carbono 14?
con las Ecuaciones diferenciales?
12 /12

Guía 1DFamilia de Curvas OrtogonalesDiego Vallejo, Melina Podestá, Eva Almirón2do. Semestre 2015
Líneas de fuerza (color violeta) en conjuntocon las líneas de igual potencial eléctrico (co-lor amarillo) para un conjunto de seis cargaseléctricas iguales colocadas en los vértices deun hexágono.http://physics.stackexchange.com/questions/ 108929/ electric- field-inside- a-regular- polygon- with- corner-charges

Matemática III - 2◦ cuatrimestre 2015 guía 1d familia de curvas ortogonales 2
Trayectos Ortogonales.
Energía potencial y líneas Verticales. Presión y líneas de Corriente.
Supongamos que queremos estudiar la dinámica de un cuerpo pun-tual cerca del suelo terrestre. En la dirección horizontal dibujemos eleje x mientras que en la vertical el eje y. En Física se puede analizaresta situación mediante una familia de curvas: las curvas equipotencia-les o curvas de igual energía potencial, definidas de tal modo que alo largo de una de esas líneas dada, no varía la Energía potencial: esmgy = Ep = Constante (en este caso son líneas de igual altura, o searectas paralelas al suelo). También resultan útiles las rectas verticales(paralelas al vector Peso P = mg).
Es interesante ver una analogía de esta situación con el flujo deagua en un conducto por diferencia de presión. Nuevamente hay dosfamilias de curvas: Las isobaras (líneas de igual presión) que se cortancon otra familia de curvas (las líneas tangentes a los vectores velocidaddel agua).
¿Qué propiedad relaciona estas dos familias de curvas?Y además, matemáticamente:¿Qué significa que dos líneas curvas se corten en ángulo recto?Tomate un tiempo para pensarlo, podés crear ejemplos, de curvas
que se cortan...
2 /10

Matemática III - 2◦ cuatrimestre 2015 guía 1d familia de curvas ortogonales 3
Dos rectas perpendiculares. Dos curvas perpendiculares...
Situación ^Considere dos rectas que se cortan en ángulo recto, como se ve en el
dibujo.
1. Calcule las pendientes de cada recta.
2. ¿Qué relación hay entre sus pendientes?
3. Y para un caso cualquiera en que las dos rectas son perpendicula-res? Qué miraría usted en la ecuación de ambas rectas para saber sison perpendiculares?
4. Si una de las rectas posee pendiente 3, la otra qué pendiente tendrá?Y si una tiene una pendiente cualquiera m, la otra ¿qué pendienteposeerá?
5. ¿Cuánto vale el producto de las pendientes de dos rectas que secortan en ángulo recto?
Ahora considere que estas dos rectas son rectas tangentes a doscurvas dadas que pasan por el mismo punto.
3 /10

Matemática III - 2◦ cuatrimestre 2015 guía 1d familia de curvas ortogonales 4
1. Dado que la recta R1 es tangente a la curva C1 ¿Qué relación mate-mática tiene esa recta R1 con la curva C1? Y, del mismo modo, ¿cuáles la relación habrá entre la recta R2 y la curva C2?.
2. Supongamos que la curva C1 tiene la ecuación y = y1(x). ¿Cuálserá la pendiente de la recta R1? ¿Evaluada en qué valor de x?
Y si la curva C2 tiene ecuación y = y2(x) ¿Cuál será la pendiente dela recta R2? ¿Evaluada en qué valor de x?
3. ¿Qué relación habrá entre y′1(x) y la y′2(x)?
Ejemplo
Supongamos que y1(x) = x2 y que y2(x) = 1/x.
1. ¿En qué punto se cortan?
2. Graficá la situación.
3. Las gráficas de cada función ¿Tienen recta tangente en el punto decorte? Graficá las rectas tangentes.
4. ¿Podés utilizar el concepto de derivada para saber si se cortan enforma ortogonal (es decir perpendicular, en ángulo recto)?
5. ¿Podés verificar lo anterior midiendo en el gráfico? Concepto previo: Cómo medir ángulos rec-tos: podés utilizar un transportador... y si notenés... hoja doblada dos veces... y si no?
�En Síntesis:�
Si el producto de las pendientes dedos rectas vale −1, ambas rectasson ortogonales o perpendiculares(se cortan en ángulo recto)
Una “Asociación” entre Familia de Curvas y Ecuación Diferencial
Situación ^Hasta ahora hemos estudiado métodos para Resolver es decir hallar la
Solución General para una Ecuación Diferencial conocida. Si grafica-mos una Solución General tendremos una Familia de Curvas, es decir:
Ecuación Diferencial −→ Familia de Curvas.
Así como la Derivación tiene como operación inversa a la Integra-ción, y elevar al cuadrado, tiene como inversa a la raíz cuadrada, ¿ha-brá una operación inversa para este proceso? O sea: ¿Podremos ob-tener la Ecuación Diferencial a partir de la ecuación de la Familia deCurvas?
Investigaremos cómo podría hacerse este proceso:
4 /10

Matemática III - 2◦ cuatrimestre 2015 guía 1d familia de curvas ortogonales 5
1. Sea la familia de curvas y = 3x + C.
a) Derivala.
b) Comprobá que la constante indeterminada C ya no está más. Esaecuación quedará y′ = 3.
c) Notemos que y′ = 3 es una ecuación, y contiene una derivada.Por lo tanto es una Ecuación Diferencial. Diremos que y′ = 3es la Ecuación Diferencial Asociada a la Familia de curvas y =
3x + C.
d) Eso significa que todas las curvas (en este caso son líneas rectas)de la familia comparten una característica: ¿Podrías decir cuál es?
2. Sea la familia de curvas y = mx.
a) Qué clase de curvas son?
b) ¿Qué tienen en común todas ellas?
c) Derivá la ecuación.
¿Pudiste eliminar la constante indeterminada m?
d) O sea, te quedaste con estas dos ecuaciones...y = mx
y′ = m
¿qué podrías hacer para eliminar la m?
e) A estas alturas podrías tener escrita en tu carpeta una ecuación.Nuevamente es una Ecuación Diferencial asociada con la Familiade curvas y = mx.
O sea, mediante el proceso de “Derivar-Eliminar” podemos obteneruna Ecuación Diferencial a partir de la ecuación de una Familia deCurvas, (que en este curso también la llamamos “Solución General”).
Familia de CurvasEcuación Diferencial
Resolver la ED
Derivar-Eliminar la Constante↪→ Definición
Diremos que una Familia de curvas y una Ecuación diferen-cial están asociadas:
1. Si al resolver una ecuación diferencial obtenemos a la familia decurvas como solución general, o,
2. si al derivar y eliminar la constante indeterminada de la familia decurvas obtenemos la ecuación diferencial.
5 /10
Matemática III - 2◦ cuatrimestre 2015 guía 1d familia de curvas ortogonales 6
Ejercitación �
Para cada Familia de Curvas halla su Ecuación diferencial asociada:
1. y = Cx22. y = Cex
3. xy = C 4. y = C ln(x)
Ahora, con dos familias de trayectos
Hasta ahora sabemos verificar si dos curvas que se cortan, se cor-tan en ángulo recto, mediante el chequeo de si las pendientes de sustangentes, multiplicadas entre sí dan −1.
Ahora consideremos que en vez de tener dos curvas, tenemos dosfamilias de curvas.
Situación ^
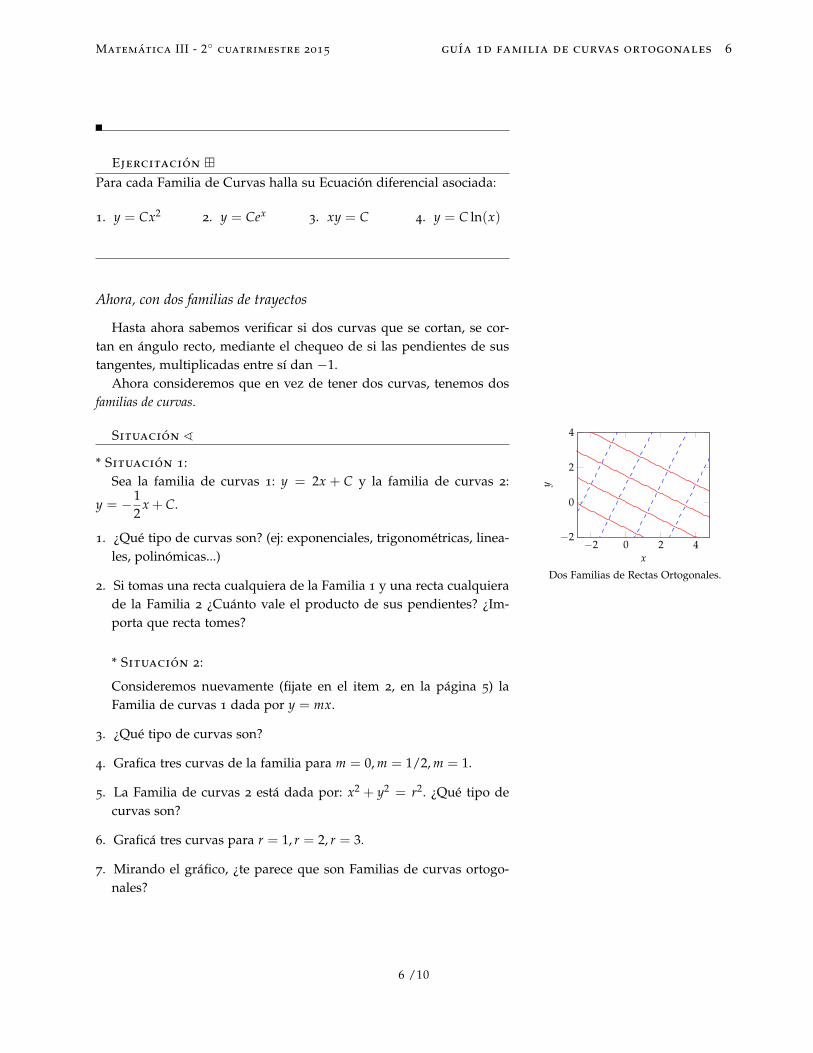
* Situación 1:Sea la familia de curvas 1: y = 2x + C y la familia de curvas 2:
y = −12
x + C.
−2 0 2 4−2
0
2
4
xy
Dos Familias de Rectas Ortogonales.
1. ¿Qué tipo de curvas son? (ej: exponenciales, trigonométricas, linea-les, polinómicas...)
2. Si tomas una recta cualquiera de la Familia 1 y una recta cualquierade la Familia 2 ¿Cuánto vale el producto de sus pendientes? ¿Im-porta que recta tomes?
* Situación 2:
Consideremos nuevamente (fijate en el item 2, en la página 5) laFamilia de curvas 1 dada por y = mx.
3. ¿Qué tipo de curvas son?
4. Grafica tres curvas de la familia para m = 0, m = 1/2, m = 1.
5. La Familia de curvas 2 está dada por: x2 + y2 = r2. ¿Qué tipo decurvas son?
6. Graficá tres curvas para r = 1, r = 2, r = 3.
7. Mirando el gráfico, ¿te parece que son Familias de curvas ortogo-nales?
6 /10

Matemática III - 2◦ cuatrimestre 2015 guía 1d familia de curvas ortogonales 7
8. Mirando sus ecuaciones qué podrías hacer para saber si son fa-milias de curvas ortogonales? Si no se te ocurre qué hacer con lasfamilias... ¿que podrías hacer tomando una curva en particular decada familia? Esas dos curvas, se cortan en ángulo recto? Y mirandoese caso particular, podrías deducir qué pasará (si son ortogonaleso no) en el caso de las familias de curvas?
En base a lo trabajado en la ejercitación anterior,
↪→ Definición
Familias de Curvas ortogonales: Son aquellas que en todo puntode corte sus tangentes tienen pendientes cuyo producto es −1. Es decirque admiten derivadas y verifican que:
y′1y′2 = −1
Ejemplo
Consigna: Verifica si las Familias de Curvas de la Situación 2 sonFamilias de Curvas Ortogonales.
Solución:
1. Para las Familias de curvas de la Situación 2, calculemos sus de-rivadas:
Concepto previo: Derivada implícita: ¿Co-mo hacés para derivar cuando no está des-pejada ninguna variable? Por ejemplo ¿cómohacés para hallar la pendiente de la tangente(y′) en un punto de la ecuación de una cir-cunferencia: x2 + y2 = 9 ?
Familia de Curvas 1
y = mx
y′ = m
y = y′x (lo hicimos en pág 5)
y′ =yx
Familia de Curvas 2
x2 + y2 = r2
2x + 2yy′ = 0
x + yy′ = 0
y′ = − xy
x
y
Las Familias de rectas que pasan por elorigen y de Circunferencias con centroen el origen son Familias ortogonales.
y multiplicando las dos derivadasyx(− x
y) = −1. Por la definición
anterior, son dos Familias de curvas ortogonales. Veamos el gráfico:
Ejercitación �
Determiná si las siguientes Familias de Curvas son ortogonales
1. y = Cx2 y y = Cex
2. y = Cx2 yx2
2k+
y2
k= 1
7 /10

Matemática III - 2◦ cuatrimestre 2015 guía 1d familia de curvas ortogonales 8
3. xy = C y x2 − y2 = C
(AGREGAR EJERCICIOS)
Ejemplo
Consigna: Encuentra y grafica la familia de curvas ortogonal a la
familia de curvas:x2
3C+
y2
C= 1.
Solución:Previamente, identifiqué qué tipo de curvas son. Fui al sitio web dewolframalpha y tipeé:
x^2/3+y^2=1, x^2/6+y^2/2=1, x^2/9+y^2/3=1
¿Porqué escribí eso? -3 -2 -1 1 2 3x
-2
-1
1
2
y
Familia de Elipses con centro en elorigen.
Ahí ví que son elipses centradas en el origen.
1. Hallamos la Ecuación Diferencial ED1 Asociada a la Familia decurvas FC1 (las Elipses):
x2
3C+
y2
C= 1
derivo
2x3C
+2yy′
C= 0
multiplico porC2
en ambos lados
x3+ yy′ = 0
y′ = − x3y
[ED1 asociada a FC1]
2. Hallamos la Ecuación Diferencial ED2 Asociada a la FC2 (que aúnno conocemos), reemplazando −1/y′ donde dice y′ (¿porqué?)
− 1y′
= − x3y
[ED2 asociada a FC2]
y′ =3yx
3. Resuelvo Concepto previo: ¿Cómo te llevás con laspropiedades de los Logaritmos? ¿Opinás quelas vamos a utilizar en este curso o no? Si note las acordás ¿sería conveniente repasarlas?¿Cuándo?
(¿Por cuál método puedo resolverla? ¿Separable, Lineal, Euler?)
8 /10

Matemática III - 2◦ cuatrimestre 2015 guía 1d familia de curvas ortogonales 9
y′ =3yx
dydx
dx =3yx
dx
1y
dy = 31x
dx∫ 1y
dy = 3∫ 1
xdx
ln y = 3 ln x + C
ln y = ln x3 + ln k Llamaremos ln k a C
ln y = ln(k.x3)
y = k.x3 [Familia de Curvas FC2]
-3 -2 -1 1 2 3x
-2
-1
1
2
y
Las Familias de elipses y de curvascúbicas son familias de curvas
ortogonales.
Veamos el gráfico en el margen donde incluímos tres curvas dela Familia de Curvas FC2.
¿Qué signo tiene k para las tres curvas del gráfico?¿Cómo serían las curvas si k fuera negativo?¿Y si k = 0 ? ¿Quedaría una solución de la Ecuación Diferencial?
Ejercitación �
Hallá la Familia de Curvas ortogonal a la Familia dada. Graficáambas familias en el mismo gráfico. ¿Podrías utilizar el gráfico paraverificar que las familias son ortogonales?
1. x2 + (y− 1)2 = r2
2. y = Ce−x
3. y− 1 = m(x + 2)
4. y2 = Cx3
9 /10

Matemática III - 2◦ cuatrimestre 2015 guía 1d familia de curvas ortogonales 10
Líneas de igual potencial eléctrico ylíneas de fuerza del campo, para unacarga cerca de una pared conductora.
Y volviendo a la figura de la primera página, donde están dos familiasde curvas representadas: las trayectorias de igual potencial eléctrico ylas líneas de fuerza (siempre tangentes a los vectores Campo Eléctrico).
Por Física II sabemos que ambas deben ser Familias de Curvas Or-togonales... entonces:
¿Está bien trazada esa figura?
Si dijiste que si, ¿Porqué sí? Si dijiste que no... ¿porqué no?Para comparar aquí tenés otra figura.
10 /10
Guía 1-ETeorema de Existencia y UnicidadDiego Vallejo, Melina Podestá, Eva Almirón2do. Semestre 2015
¿Qué dice y para qué sirve el Teorema deExistencia y Unicidad de la solución de un
Problema con Valor Inicial?

Matemática III - 2◦ cuatrimestre 2015 guía 1-e teorema de existencia y unicidad 2
Existencia y Unicidad
Situación ^Sea el siguiente
PVI:
y′ = f (x, y) [ED]
y(x0) = y0 [CI]
De él sabemos que: a) Tiene solución y(x) y b) que esa solución y(x)es única, cualquiera sea el punto (x0, y0) del plano R2.
Preguntas:
¿Pueden crear ejemplos? ¿Probar con di-ferentes condiciones iniciales?
1. Dadas dos soluciones particulares y1(x) e y2(x) de la ecuación di-ferencial [ED] ¿pueden las gráficas de y1(x) e y2(x) cortarse en unpunto? ¿Recuerdan una pregunta similar en la guía 1C?
2. Vean la gráfica siguiente. ¿Qué relación le encuentran con las dospreguntas anteriores?
x0
y0
x
y
3. Para distintas condiciones iniciales [CI] pero la misma Ecuación Di-ferencial [ED] ¿obtendremos necesariamente diferentes solucionesparticulares?
4. Supongamos que una EDO modela un problema económico de cre-cimiento de un país. La solución buscada es
y(t) = “Salario Básico de un Empleado en función del tiempo”
Discutan en grupo: ¿Qué pensarían si encontramos una solución...
a) ... y luego comprobamos que no es la única?
b) ... y luego comprobamos que es la única?
c) ... y luego no podemos verificar que sea la única?
Si una ecuación tiene solución o no, ¿sería útil saberlo antes derealizar ningún cálculo?
2 /10

Matemática III - 2◦ cuatrimestre 2015 guía 1-e teorema de existencia y unicidad 3
Para responder a estas preguntas veamos el siguiente
.
⇒Teorema
Existencia y Unicidad de la solución de un PVI(TEU)Consideremos el siguiente
PVI :
y′ = f (x, y),
y(x0) = y0.
Si las siguientes dos funciones de dos variables:
f (x, y)
y su derivada∂ f∂y
(x, y)
son funciones continuas en un rectángulo R del plano xy que con-tiene al punto (x0, y0), entonces, existirá una y solamente una fun-ción de una variable y(x) definida en un intervalo que contiene alpunto x = x0 que es solución del PVI.
Para utilizar este teorema precisamos distinguir tres funciones dife-rentes. La primera es f (x, y) una función de dos variables, cuyo dominio
está en R2. La segunda es su derivada∂ f∂y
(x, y), también definida en
todo el plano xy, o una porción del mismo. La tercera es la que másnos interesa, la solución y(x) del problema, función de una variablecuyo dominio está en la recta real R.
�En Síntesis:�
¿Cuáles son las condiciones del teo-rema?
H1: f (x, y) continua en un rectán-gulo R.
H2:∂ f∂y
continua en R.
H3: Hay un rectángulo R que de-be contener al punto (x0, y0)por donde pasa la solución.
Este Teorema nos garantiza que si se verifican sus hipótesis, dos so-luciones distintas de la ED tendrán gráficas que no pueden cruzarse nitocarse.
Ejemplo
1. Consideremos el siguiente problema de valor inicial:
PVI1 :
y′ = 3y2/3
y(1) = 0,
¿Qué dice el Teorema? Comparemos
De la tabla vemos que:
3 /10

Matemática III - 2◦ cuatrimestre 2015 guía 1-e teorema de existencia y unicidad 4
Teorema: Ejemplo 1:y′ = f (x, y)
y(x0) = y0.
y′ = 3y2/3
y(1) = 0.
Rectángulo R ?
Cuadro 1: Comparación entre el Teore-ma y el Ejemplo 1
a) f (x, y) = 3y2/3
b) el punto por donde pasa la función solución incógnita es (x0, y0) =
(1, 0).
c) El ejemplo no dice nada del Rectángulo... ¿qué podrías hacer?¿Habrá algún rectángulo donde se cumplan las condiciones?
Veamos las hipótesis o condiciones:
H1: f (x, y) = 3y2/3 continua en R. La función 3y2/3 es una Concepto previo: ¿Cuándo una potencia xr
es discontinua o no se puede calcular?composición de una raíz cúbica con una potencia cuadrática ypor lo tanto es continua en todo el plano R2
H2:∂ f∂y
= 2y−1/3 =2
y1/3 =2
3√
yes una función racional. Por Concepto previo: Una función racional es
un cociente, cuyo numerador y cuyo denomi-nador son polinomios. No existen cuando elpolinomio del denominador vale cero. ¿Por-qué?
lo tanto posee una discontinuidad en los punto (x, y) de R2
donde y = 0, o sea es discontinua en todo punto del eje x.
H3: Sobre el rectángulo R:(*) debe contener al punto (x0, y0) = (1, 0)(**) Y por H2: no debe contener puntos del eje x.
Estas últimas dos condiciones (*) y (**) son imposibles decumplir al mismo tiempo ya que (x0, y0) = (1, 0) es un puntodel eje x.
Por lo tanto, no se verifican las hipótesis, y el Teorema nonos brinda información sobre el
PVI1 :
y′ = 3y2/3
y(1) = 0.
¿Podemos resolver el PVI? La ecuación y′ = 3y2/3 es una ecua-ción de variables separables.
dydx
= 3y2/3
13y2/3 dy = 3dx∫ 13y2/3 dy = 3
∫dx
3y1/3 = 3x + C
4 /10

Matemática III - 2◦ cuatrimestre 2015 guía 1-e teorema de existencia y unicidad 5
La solución general será:
y(x) = (x + C)3 y aplicando la condición
y(1) = 0
(1 + C)3 = 0 por lo tanto C = −1
y la particular queda:
y(x) = (x− 1)3
Pueden verificar que además admite otra solución no conte-nida en la solución general: la solución y(x) = 0 que tambiénverifica que y(1) = 0.
−1 0 1 2 3−2
−1
0
1
2
3
4
(1, 0)
y = 0
y = (x− 1)3
x
y
El PVI1 admite dos soluciones. Existesolución y no es única.
Conclusión: El PVI1 posee solución. Sin embargo no es única.Hay dos diferentes:
a) y1(x) = 0 y
b) y2(x) = (x− 1)3
Y entonces... ¿Se contradice el teorema?
Una más... ¿Qué cambiaría del análisis anterior si tuviéramos elsiguiente PVI:
PVI1-BIS:
y′ = 3y2/3
y(1) = 1.
?
En otras palabras: ¿es aplicable el Teorema de Existencia y Unici-dad para (x0, y0) = (1, 1)?
Y... ¿para qué otros puntos (x0, y0) podrías aplicar el Teorema?
2. Consideremos el siguiente problema con valor inicial
PVI2 :
y′ = (1 + y2),
y(0) = 0.
¿Qué dice el Teorema? Comparemos Cuadro 2: Comparación entre el Teore-ma y el Ejemplo 2
Teorema: Ejemplo 1:y′ = f (x, y)
y(x0) = y0.
y′ = 1 + y2,
y(0) = 0.
Rectángulo R ?
5 /10

Matemática III - 2◦ cuatrimestre 2015 guía 1-e teorema de existencia y unicidad 6
De la tabla vemos que:a) f (x, y) = 1 + y2
b) el punto por donde pasa la función solución incógnita es (x0, y0) =
(0, 0).c) Nuevamente el ejemplo no dice nada del Rectángulo. ¿Podés
encontar un rectángulo donde se cumplan las condiciones?
Veamos las hipótesis o condiciones:
H1: f (x, y) = 1 + y2 continua en R. La función 1 + y2 es unpolinomio y por lo tanto es continua en todo el plano R2
H2:∂ f∂y
= 0 + 2y es un polinomio, y por lo tanto es continua en
todo el plano R2.H3: Sobre el rectángulo R que debe contener al punto (x0, y0) =
(0, 0)... podría ser cualquiera, por ejemploel rectángulo de 10 por 20 unidades centrado en el origen (0, 0)Ya que si H1 y H2 se cumplen en todo el plano, entonces secumplen en cualquier rectángulo en el plano.
Por lo tanto, se verifican las hipótesis, y el Teorema nos garantizaque el
PVI2 :
y′ = 1 + y2
y(0) = 0.
tendrá solución y(x) y esta solución es única.¿Podemos resolver el PVI? La ecuación y′ = 1+ y2 es una ecua-
ción de variables separables.En efecto
11 + y2 dy = dx
Integrando obtenemos Concepto previo: Derivada de la funciónArco Tangente
arctan(y) = x + C
donde C es una constante arbitraria. Por lo tanto Concepto previo: Definición de la Tangente
y(x) = tan(x + C) solución general
Utilizando la condición inicial y(0) = 0: Concepto previo: Dominio de la Tangente.¿Dónde es discontinua?
tan(0 + C) = 0
encontramos que C = 0 (o C = nπ para cualquier entero n ). Asíque la solución particular es y(x) = tan(x).
¿Cuál es el dominio de esta función? La función tan(x) no estádefinida para los valores de x = . . . ,−3 π
2 ,−π2 , π
2 , 3 π2 , . . . , k π
2 , . . .con k impar. La porción continua que pasa por (0, 0) es la que
está en el Dominio D = (−π
2,
π
2)
−π − π2 0 π
2π
−4
−2
0
2
4
(x0, y0)
x
y
y = tan(x)
Existe solución y es única para el PVI26 /10
Matemática III - 2◦ cuatrimestre 2015 guía 1-e teorema de existencia y unicidad 7
3. Consideremos ahora
PVI3 :
y′ = x2 + y2,
y(1) = 1.
¿Qué dice el Teorema? Comparemos Cuadro 3: Comparación entre el Teore-ma y el Ejemplo 3
Teorema: Ejemplo:y′ = f (x, y)
y(x0) = y0.
y′ = x2 + y2,
y(1) = 1.
Rectángulo R ?
De la tabla vemos que:
a) f (x, y) = x2 + y2
b) la función buscada pasa por (x0, y0) = (1, 1).
c) Tampoco ahora el ejemplo dice nada del Rectángulo. ¿Podésencontar un rectángulo donde se cumplan las condiciones?
Veamos las hipótesis o condiciones:
H1: f (x, y) = x2 + y2 continua en R. La función x2 + y2 es unpolinomio y por lo tanto es continua en todo el plano R2
H2:∂ f∂y
= 2y es un polinomio, y por lo tanto es continua en todo
el plano R2.
H3: Sobre el rectángulo R que debe contener al punto (x0, y0) =(0, 0)... podría ser cualquiera, por ejemploel rectángulo de 3x3 que contenga al punto (1, 1).
Por lo tanto, se verifican las hipótesis, y el Teorema nos garantizaque el
PVI2 :
y′ = x2 + y2
y(1) = 1.
tendrá solución y(x) y esta solución es única.
¿Podemos resolver el PVI? Veamos...
Verificá que la ecuación y′ = x2 + y2 no es separable ni tam-poco se puede escribir como lineal.
¿Y algún otro método de guías anteriores? Cuál?En grupo discutan qué pueden hacer para graficar la solución
y obtener el valor de y(2). ¿Podemos verificar lo anterior median-te wolframalpha?
7 /10

Matemática III - 2◦ cuatrimestre 2015 guía 1-e teorema de existencia y unicidad 8
Ejercitación �
1. Analizar la existencia y unicidad de la solución (mediante el TEU) yluego resolver y graficar la solución para cada uno de los siguientesPVI:
a) y′ = y√
x
y(1) = e−2/3
b) y′ = 6xy2/3
y(2) = 27
c) y′ = 6xy2/3
y(1) = 0
2. Mostrar que
y′ =yx
y(0) = y0
tiene:
a) infinitas soluciones si y0 = 0
b) ninguna solución si y0 6= 0
Interpretá gráficamente.
¿Sirve el TEU para realizar esta actividad?
3. Estudiar para cada PVI (sin resolverlo) y graficar:
i) para qué puntos (x0, y0) el TEU es aplicable,
ii) para qué puntos (x0, y0) el TEU no es aplicable.
¿Qué se puede afirmar en cada caso i), o ii) ?
a) y′ = 6x2y1/2
y(x0) = y0
8 /10

Matemática III - 2◦ cuatrimestre 2015 guía 1-e teorema de existencia y unicidad 9
Concepto previo: |x| función valor absolu-to o módulo de x. Derivada del valor absolutode x.
b) y′ = |y|y(x0) = y0
c) y′ = x ln(y− 2)
y(x0) = y0
4. Consideren el problema de valor inicialy′ = e−x2
y(0) = 1
a) ¿Pueden escribir la antiderivada∫
e−x2dx como combinacíón de Concepto previo: Funciones elementales:
polinomios, seno, coseno, exponencial, loga-ritmo, sus inversas y sus combinaciones.
funciones elementales?
b) Vean que sí existe∫
e−x2dx aunque no la podamos escribir como
combinación de funciones elementales (pueden utlizar el Teore-ma Fundamental del Calculo, pueden recordar el enunciado alfinal de esta Guía 1-E) Concepto previo:
La integral definida∫ x
0 e−t2dt:
a) es función de x,b) no es función de t,c) es distinta de la Integral indefinida∫
e−x2dx
c) ¿podemos asegurar que no tiene solución? ¿o que sí la tiene?
d) Verifiquen la solución del PVI puede escribirse:
y(x) = 1 +∫ x
0e−t2
dt
9 /10

Matemática III - 2◦ cuatrimestre 2015 guía 1-e teorema de existencia y unicidad 10
R e p a s o d e M a t e m á t i c a I
Teorema Fundamental del Cálculo
⇒Teorema
(Teorema Fundamental del Cálculo) Si f es una función conti-nua en un intervalo [a, b] y
F(x) =∫ x
af (t)dt,
entonces podemos obtener la derivada de F así:
F ′(x) =[∫ x
af (t)dt
]′= f (x)
Es decir la derivada de F(x) es el integrando evaluado en x: f (x)
10 /10
Guía 2Ecuaciones Diferenciales de 2do OrdenDiego Vallejo, Melina Podestá, Eva Almirón2do. Semestre 2015
¿Qué dicen las Ecuaciones Diferenciales delmovimiento de una masa unida a un resorte?

Matemática III - 2◦ cuatrimestre 2015 guía 2 ecuaciones diferenciales de 2do orden 2
Ecuaciones diferenciales de 2º orden
En esta guía referiremos almaterial
“EDO 2º Orden Separata
Cap17. Stewart.pdf”(subido al grupo de Facebook)
Modelado. Física
Consideremos un cuerpo de masa m unido a un resorte. Marquemoscomo x = 0 a la posición A cuando el resorte está en su longitudnatural.
Sabemos de Física que x′(t) = v(t)es la función velocidad, y que x′′(t) =a(t) es la función aceleración.
Para diferentes momentos el resorte puede tener diferentes longi-tudes, y el cuerpo puede ocupar diferentes posiciones, por lo tanto laposición será una función del tiempo x = x(t).
Ley Hooke: Un resorte que se elonga xunidades (desde su posición de reposo Ahasta la posición B ) ejercerá una Fuerzarestauradora FH = −kx (¿porqué tieneun signo “−”?).
Por la Ley de Hooke el resorte ejercerá sobre el cuerpo de masa muna fuerza restauradora FH proporcional al elongamiento y opuesto aél: FH = −kx. Aquí llamamos k a la constante de proporcionalidad dela Ley de Hooke.
Sobre el cuerpo de masa m aplicamos la 2da ley de Newton para laFuerza total F, que en este caso es igual a FH
ma = FH y como la aceleración a = x′′,
mx′′ = −kx
mx′′ + kx = 0
x′′ +km
x = 0
x′′ + ω2x = 0 (*) ED de 2º orden.
donde hemos llamado ω =
√km
. Supongamos por un momento que
k = 1 y que m = 1.
Recordemos las unidades:la masa se mide en kg
la fuerza en Nla posición en m
y dado que k = −F/xlas unidades de k serán: ............. ?
La ecuación queda
x′′ + x = 0 (∗∗)
y traducida al castellano quiere decir:
“¿Cuál es la función que derivada dos veces esigual a sí misma cambiada de signo?” (x′′ = −x)
Esta ecuación es de la forma x′′+ p(t) x′+ q(t) x = g(t). A este tipode ecuaciones las llamaremos Ecuaciones Diferenciales Ordinarias de2º orden lineales.
En este caso: por ser g(t) = 0 la denominaremos homogénea ydado que los coeficientes no dependen de la variable independiente t(son p(t) = 0 y q(t) = 1) la denominaremos a coeficientes constantes.
2 /22

Matemática III - 2◦ cuatrimestre 2015 guía 2 ecuaciones diferenciales de 2do orden 3
Los múltiplos y las combinaciones lineales de soluciones* Verificación que C1 cos t es solución:
x′ = −C1 sen t , y x′′ = −C1 cos t.Reemplazo en la ED (∗∗):
x′′ + x = 0
−C1 cos t + C1 cos t = 0 X
* Verifico que sen t es solución:x′ = cos t , y x′′ = − sen t.Sustituyo en (∗∗):
x′′ + x = 0
− sen t + sen t = 0 X
Hablemos de las soluciones.Una solución particular es x1 = cos t y por lo tanto, cualquier múl-
tiplo C1x1 = C1 cos t será solución (Vean en el margen).Asimismo, dado que x2(t) = sen t es también solución, análogamen-
te C2x2(t) = C2 sen t será solución.
0 2 4 6
−2
0
2
t
x(t)
xC(t) = 2x1 − x2 = 2 cos t− sen t
Una combinación lineal xC(t)de x1 = cos t (punteado azul) yde x2 = sen t (punteado rojo)
x1, x2, xC son todas soluciones de la EDx′′ + x = 0
Y también por reglas de derivación, la suma:
C1x1(t) + C2x2(t) = C1 cos t + C2 sen t
será solución. Llamaremos combinación lineal de las funciones x1(t) =cos t y x2(t) = sen t a la suma C1 cos t + C2 sen t. En este caso, la com-binación lineal, contiene dos constantes independientes, y por lotanto será la Solución General de la ED.
Concepto previo: ¿Qué era “combinaciónlineal” en Matemática II?
Independencia Lineal
Miremos el resultado anterior... ¿Toda combinación lineal será unasolución general?
I. Combinación Lineal de las soluciones xA = cos t y xB = 3 cos tVeamos que esta combinación lineal también será solución, aunqueno contiene dos constantes independientes:
C1 cos t + C23 cos t = C3 cos t con C3 = C1 + C23
ya que podemos sacar factor común cos t. Por lo tanto no es la so-lución general de la ED.
II. Combinación Lineal de las soluciones x1 = cos t y x2 = sen tEn el caso anterior estamos perdiendo a sen t. ¿Qué pasa si lo inclui-mos? Ahora formo la combinación lineal y no puedo sacar factorcomún como en el caso I:
C1 cos t + C2 sen t
Esta expresión si contiene dos constantes independientes ypor lo tanto, es la solución general.
¿Qué hay de diferente entre el caso I y el caso II?
En el caso I, el cocientexAxB
=cos t
3 cos t=
13= k constante, y diremos
que xA y xB son linealmente dependientes, o sea que xA es múltiplode xB.
En el caso II, el cocientex2
x1=
sen tcos t
= tan t no es constante, y
diremos que x1 y x2 son linealmente independientes,Por lo tanto, sólo precisamos encontrar dos soluciones particulares
linealmente independientes...
3 /22

Matemática III - 2◦ cuatrimestre 2015 guía 2 ecuaciones diferenciales de 2do orden 4
El resorte en un medio viscosoEste es un modelo sencillo de la accióndel medio sobre el resorte. No es el únicomodelo, pueden buscar en internet quéotros hay, si lo desean.
Supondremos ahora que el cuerpo está colocado en un medio vis-coso y éste ejerce una fuerza resistiva opuesta a la velocidad y propor-cional a la misma Fv = −b.v
La ecuación (∗∗) quedará modificada
ma = FH − Fv velocidad v = x′
mx′′ = −kx− bx′
mx′′ + bx′ + kx = 0
x′′ +bm
x′ +km
x = 0 llamo c = b/m
x′′ + cx′ + ω2x = 0 (***) ED de 2º orden.
Ahora pondremos el resorte en “pausa”, veremos algo de teoría yvolveremos al final con el mismo...
Ecuaciones Diferenciales de 2º orden
Estudiaremos ecuaciones diferenciales lineales de 2º orden:
y′′ + py′ + qy = g [I]
donde p = p(x), q = q(x), y g = g(x) son funciones de la varia-ble independiente x. Llamaremos inhomogéneas a las ecuaciones [I]cuando g 6= 0. Si hacemos g = 0 tendremos la ecuación diferencialhomogénea [H] asociada a la ecuación anterior [I]:
y′′ + py′ + qy = 0 [H]
Si p y q son constantes diremos que la ecuación diferencial lineal esa coeficientes constantes.
Ejemplo
Clases de Ecuaciones Diferenciales de 2º orden lineales:• ED inhomogénea: y′′ + ln(x)y′ + 3y = cos x
• ED homogénea: y′′ + 2y′ − x2y = 0
• ED homogénea a coeficientes constantes: y′′ + 2y′ − 2y = 0
• ED inhomogénea a coeficientes constantes: y′′ + 2y′ − 4y = ex
• Por lo tanto, la ecuación x′′ + x = 0 es una ecuación de 2º ordenlineal a coeficientes constantes homogénea donde la variable in-
4 /22

Matemática III - 2◦ cuatrimestre 2015 guía 2 ecuaciones diferenciales de 2do orden 5
dependiente es el tiempo t y la incógnita es la posición x(t).
Recordemos de matemática II:
↪→ Definición
Dos funciones y1(x) e y2(x) son linealmente dependientes si unaes múltiplo de la otra:
y1(x) = ky2(x) para algún número real k
En caso contrario serán linealmente independientes
Esta definición equivale a decir que el cocientey1(x)y2(x)
es constante.
Ejercitación �
Los siguientes pares de funciones, ¿son Linealmente Dependientes?
1. y1(x) = 1 y2(x) = 3
2. y1(x) = ln x y2(x) = ex
3. y1(x) = ln x y2(x) = ln(1/x)
4. y1(x) = x2 y2(x) = −x2
↪→ Definición
Llamaremos Combinación Lineal de dos funciones y1(x) e y2(x) a:
C1y1(x) + C2y2(x)
donde C1 y C2 son números constantes reales.
Generalizando el resultado de la página 3, vemos que para una
�En Síntesis:�
Para resolver una Ecuación diferencial homogénea de 2º orden(EDH), precisamos una combinación lineal de dos funciones li-nealmente independentes.
Método para Resolver ED Homogéneas a Coeficientes constantes:
Vean el método en EDO 2do Orden - Separata Cap17. Stewart
páginas 1112 hasta la 1115, en particular los Casos I, II, y III, y los
5 /22

Matemática III - 2◦ cuatrimestre 2015 guía 2 ecuaciones diferenciales de 2do orden 6
ejemplos 1,2,3 y 4. Continúen con Problema de Valor Inicial (PVI), elejemplo 5 y 6. (No veremos Problema con valores en la frontera).
Ejercitación �
Resuelvan las siguientes ED:
• y′′ − y′ − 6y = 0
•d2ydx2 − 4
dydx
+ 13y = 0
• y′′ − 2y′ + y = 0Resuelvan los siguientes PVI:
•
y′′ − y′ − 6y = 0
y(0) = 1
y′(0) = 0
•
d2ydx2 − 4
dydx
+ 13y = 0
y(0) = 0
y′(0) = 1
•
y′′ − 2y′ + y = 0
y(0) = 5
y′(0) = 10
Método: ED Inhomogéneas a coeficientes Constantes
Vean el método en la sección 17.2 de EDO 2do Orden - Sepa-rata Cap17. Stewart (páginas 1117-1122). Método de CoeficientesIndeterminados, ejemplos 1,2,3,4,5,6.
Ejercitación �
Resuelvan las siguientes ED:
• y′′ + 3y′ + 2y = x
• y′′ − 4y′ + 5y = e−x
• y′′ − y′ = xex
Resuelvan los siguientes PVI:
•
y′′ + 3y′ + 2y = 4x
y(0) = −3
y′(0) = 1
6 /22

Matemática III - 2◦ cuatrimestre 2015 guía 2 ecuaciones diferenciales de 2do orden 7
•
y′′ − 4y′ + 5y = e−x
y(0) = 1
y′(0) = 0
•
y′′ − y′ = xex
y(0) = 0
y′(0) = 1
Método de la Transformación de Laplace
Funciones definidas mediante Integrales
Recordemos algunas propiedades de las Integrales definidas.
I. La integral no depende de la variable de integraciónConcepto previo: Integral definida
La siguiente integral definida∫ 5
14x3dx = x4
∣∣∣51= 54 − 14
la evaluamos por Regla de Barrow, reemplazando la variable x por loslímites 1 y 5, y así la integral no depende de x. Podemos cambiar lavariable x por otra variable u y nada varía: Concepto previo: Regla Barrow∫ 5
14x3dx =
∫ 5
14u3du
II. La integral depende de los límites de integración
Si repetimos el cálculo para un límite variable t queda:
∫ t
14x3dx = x4
∣∣∣t1= t4 − 14 = f (t)
nuevamente vemos que la integral no depende de x, y sí es función Notemos que si tomamos límite parat→ ∞ el resultado no dependerá de t.de la variable t que está en un límite.
III. La integral depende de otras variables que no se integran
También es posible que haya otras variables independientes dentrodel integrando:
∫ 5
14sx3dx = s
∫ 5
14x3dx = s( x4
∣∣∣51) = s(54 − 14) = f (s)
otra vez, la integral no depende de x pero sí de s.
Ejercitación �
7 /22

Matemática III - 2◦ cuatrimestre 2015 guía 2 ecuaciones diferenciales de 2do orden 8
1. ¿De qué variables depende∫ t
1 4 cos(y2)dy? Concepto previo: Derivada parcial.
2. ¿Cuánto vale la derivada parcial de∫ 5
1 s1u
du con respecto a u? ¿y laderivada parcial con respecto a s?
Integrales Impropias
↪→ DefiniciónHay otros casos de integrales impropiasque no nos interesan en este curso deMatemática III.
Llamaremos integral impropia a una integral que lleva el símbolo∞ en el límite superior de integración. Esta se calcula mediante:∫ ∞
0f (x)dx = lı́m
t→∞
∫ t
0f (x)dx
Notemos que la integral impropia puede no existir si la operaciónlı́mt→∞
∫ t0 f (x)dx no existe. En este caso diremos que la integral no
converge o que diverge.
Ejemplo
Consigna:Verifiquen si existen las siguientes integrales impropias. En caso de
existir calculen su valor.
1.∫ ∞
0
1x + 1
dx 2.∫ ∞
0
1(x + 2)2 dx 3.
∫ ∞
0e−2udu
Solución:
1.∫ ∞
0
1x + 1
dx
2 4 6
0,5
1
Área bajo la curva 1x+1 entre 0 y t. La
integral no converge.
a. Reemplazo el símbolo ∞ por una variable, por ej. t, y calculo:∫ t
0
1x + 1
dx = ln(x + 1)|t0 = ln(t + 1)− ln(0 + 1) = ln(t + 1)
b. Tomo límite tendiendo a infinito: Concepto previo: límite tendiendo a infini-to de la función logaritmo natural.
lı́mt→∞
∫ t
0
1x + 1
dx = lı́mt→∞
ln(t + 1) = ∞
Conclusión: la integral impropia no existe. Podemos decir lo mismodiciendo que la integral diverge.
2.∫ ∞
0
1(x + 2)2 dx
2 4 6
0,1
0,2
Área bajo la curva 1(x+2)2 entre 0 y t.. La
integral converge.
a. Reemplazo el símbolo ∞ por t, y calculo:∫ t
0
1(x + 2)2 dx = −(x + 2)−1
∣∣∣t0= −
(1
t + 2− 1
0 + 2
)= − 1
t + 2+
12
8 /22

Matemática III - 2◦ cuatrimestre 2015 guía 2 ecuaciones diferenciales de 2do orden 9
b. Tomo límite tendiendo a infinito: Concepto previo: límite tendiendo a infini-to de un cociente.
lı́mt→∞
∫ t
0
1x + 1
dx = lı́mt→∞− 1
t + 2+
12=
12
Conclusión: la integral impropia existe y converge al valor 1/2.
3.∫ ∞
0e−2udu
a. Reemplazo el símbolo ∞ por t, y calculo:
∫ t
0e−2udu =
1−2
e−2u∣∣∣∣t0= −
(12
e−2t − 12
e−2×0)= −1
2e−2t +
12
0,5 1 1,5
0,5
1
Área bajo la curva e−2u entre 0 y t. Laintegral converge.
b. Tomo límite tendiendo a infinito:
lı́mt→∞
∫ t
0e−2udu = lı́m
t→∞−1
2e−2t +
12=
12
Conclusión: la integral impropia existe y converge al valor12
. Concepto previo: límite tendiendo a infini-to de función exponencial.
Luego de haber seguido los ejemplos, vemos que no es inmediato apartir del gráfico, determinar si una integral impropia converge o no.
Ejercitación �
Verifiquen si existen las siguientes integrales impropias. En caso deexistir calculen su valor:
1.∫ ∞
0e4xdx
1 2
5
10
Exponencial creciente erx con r > 0.¿Qué pueden decir de lı́mx→∞ erx?
2.∫ ∞
0e−3xdx
3.∫ ∞
0e−stdt
El resultado ¿es una función de t, de s o de ambas variables? Anali-cen qué ocurre si s es un número negativo, o si es positivo o cero.
4.∫ ∞
0te−3tdt Concepto previo: Integración por partes.
La Transformada de Laplace
↪→ Definición
Sea f : R+ → R
(es decir que f (t) está definida para t > 0). La Transformada de La-place de f es una nueva función F(s) = L[ f (t)]. Se obtiene mediante: Notemos que la Transformada de una
función, es una integral impropia:∫ ∞
0f (t)e−s tdt = lı́m
b→∞
∫ b
0f (t)e−s tdt
y por lo tanto puede no existir para al-gunas funciones f (t). En el Anexo pue-den ver las condiciones de existencia deL[ f (t)].
L[ f (t)] = F(s) =∫ ∞
0f (t)e−s tdt
9 /22

Matemática III - 2◦ cuatrimestre 2015 guía 2 ecuaciones diferenciales de 2do orden 10
si existe.
¿Y si buscás Laplace Transform en
wolframalpha ?
Ejercitación �
1. La transformada L[ f (t)] ¿depende de t? ¿De qué variable depende?
Ejemplo
Consigna: Obtengan la transformada F(s) = L[e4t]
Solución: Debo calcular
F(s) = L[e4t] =∫ ∞
0e4te−stdt = lı́m
b→∞
∫ b
0e4te−stdt
a. Busco su antiderivada:
Por propiedades de los exponentes∫e4te−stdt =
∫e4t−stdt
=∫
e(4−s)tdt
aplico sustitución: u = (4− s)t
=∫
eu 14− s
du
= eu 14− s
=1
4− se(4−s)t
Cálculo de lı́mx→∞ erx
Para resolver este límite recordemosque con una función exponencial erx
pueden pasar tres cosas (que ya han vis-to en los ejercicios de la página 9.)
1. si r es positivo, es exponencial cre-ciente y el límite a +∞ no existe:lı́mx→∞ e4x = ∞.
2. si r es negativo, es exponencial de-creciente y el límite a +∞ da cero:lı́mx→∞ e−3x = 0.
3. si r = 0 es la función constante e0x =1... tendríamos la tentación de to-mar límite lı́mx→∞ 1 = 1. Sin embar-go ya no es más una función exponen-cial, sino constante así que volvemosal punto a. y chequeamos la primiti-va:
∫e4t−stdt =
∫e0tdt =
∫1dt = t.
Aplico Barrow: t|b0 = b− 0 = b. Tomolímite: lı́mb→∞ b = ∞, y por lo tantotampoco en este caso el límite existe.
b. Por Regla Barrow:∫ b
0e4te−stdt =
[1
4− se(4−s)t
]b
0
=1
4− se(4−s)b − 1
4− se(4−s)0
=1
4− se(4−s)b − 1
4− s
c. Tomo límite tendiendo a infinito:
lı́mb→∞
[1
4− se(4−s)b − 1
4− s
]=
14− s
lı́mb→∞
e(4−s)b − 14− s
Analizo tres casos:a) r = 4− s < 0, es decir que si s > 4 la transformada existe y vale
14− s
lı́mb→∞
e(4−s)b − 14− s
=1
4− s× 0− 1
4− s=
1s− 4
10 /22

Matemática III - 2◦ cuatrimestre 2015 guía 2 ecuaciones diferenciales de 2do orden 11
b) r = 4− s > 0 es decir que si s < 4, la transformada no existe yaque el límite no existe.
c) r = 4− s = 0, o sea s = 4, y al igual que en el caso b) la transfor-mada tampoco existe.
Por lo tanto la transformada buscada es:
L[e4t] =1
s− 4si s > 4.
Ejercitación �
1. En la ejercitación anterior (página 9) hemos estudiado integralesimpropias. ¿Cuáles de estas integrales son efectivamente transfor-madas de Laplace? y en caso de que lo sean: ¿de qué función sontransformadas?
2. Verifiquen las Transformadas de Laplace de las siguientes funcio-nes.
a) L[1] = 1s
b) L[t] = 1s2
c) L[e−5t] =1
s + 5y es válida sólo para s > −5
d) L[sen(kt)] =k
s2 + k2 .
(pueden ver en el Anexo II un ejemplo para un caso particular)
Ejemplo
Consigna: Calcule L[ f ′(t)] en términos de F(s) = L[ f (t)].
Solución: Este ejemplo nos pide relacionar la transformada de laderivada de función con la transformada de una función en general.
Partimos de la definición de Transformada:La transformada de f : F(s) = L[ f (t)] =
∫ ∞0 e−st f (t)dt
La transformada de f ′ es:
L[ f ′(t)] =∫ ∞
0e−st f ′(t)dt
= lı́mb→∞
∫ b
0e−st f ′(t)dt
a. Busco la antiderivada del integrando (integrando por partes)
11 /22

Matemática III - 2◦ cuatrimestre 2015 guía 2 ecuaciones diferenciales de 2do orden 12
Elijo u = e−st y dv = f ′(t)dt.
Entonces du = −se−stdt y v = f (t)∫e−st f ′(t)dt = e−st f (t)−
∫f (t)
(−se−st) dt
= e−st f (t) + s∫
f (t)e−stdt
b. Aplico regla de Barrow:
∫ b
0e−st f ′(t)dt = e−st f (t)
∣∣b0 + s
∫ b
0f (t)e−stdt
= e−sb f (b)− e−s×0︸ ︷︷ ︸=1
f (0) + s∫ b
0f (t)e−stdt
c. Tomo límite tendiendo a infinito: Para una función de orden menor a unaexponencial lı́mb→∞ e−sb f (b) = 0 si s >0
∫ ∞
0e−st f (t)dt = lı́m
b→∞
∫ b
0e−st f ′(t)dt
= lı́mb→∞
[e−sb f (b)− f (0) + s
∫ b
0f (t)e−stdt
]= lı́m
b→∞e−sb f (b)︸ ︷︷ ︸→0
− f (0) + s lı́mb→∞
∫ b
0f (t)e−stdt︸ ︷︷ ︸
Transformada de f(t)
= − f (0) + sF(s)
Observación: para el caso de una función que pasa por el origen,f (0) = 0, y resulta que Transformada de f ′= s×Transformada de f . Dichoen castellano: multiplicar por s una transformada de una función f ,nos dará la transformada de la derivada de f .
Ejercitación �
1. Sea f (t) = 1 y su primitiva es g(t) = t. Qué relación hay entre L[1]y L[t]
2. Para funciones cuya gráfica pasa por el origen:
Si multiplicar por s equivale (en el mundo “transformado”) a derivar,a qué equivaldrá dividir por s?
Dicho de otro modo, qué relación hay entre la Transformada de unafunción f y la de su primitiva?
3. A partir de la definición, y trabajando en la integral que define a latrasformada de Laplace, comprueben que
12 /22

Matemática III - 2◦ cuatrimestre 2015 guía 2 ecuaciones diferenciales de 2do orden 13
a) L[t2] =2!s3
b) L[t3] =3!s4 .
¿Puede deducir cuál será la transformada de t4?
¿y la de tn con n ∈N?
c) L[ f ′′(t)] = s2 F(s)− s f (0)− f ′(0)
d) L[eat f (t)] = F(s− a)
4. Con la información del último inciso volvamos a mirar la preguntadel inciso 2:
¿Cómo obtengo de modo sencillo L[12
t2] sabiendo que12
t2 es laprimitiva de t?
¿Cómo obtengo de modo sencillo L[13
t3] sabiendo que13
t3 es la
primitiva de t2?
Nota: Todas estas funciones t, t2 y t3 cumplen que f (0) = 0 (escondición necesaria)
5. Considera la función: Concepto previo: La integral definida esaditiva respecto del intervalo de integra-ción. Es decir:
∫ ba f (x)dx =
∫ ca f (x)dx +∫ b
c f (x)dx donde a, b, c ∈ R y las tres inte-grales existen.
U (t) =
0 t < 0
1 t > 0
Grafíquenla, y calculen L[U (t)].6. Definiremos la función de Heaviside (escalón) en x = a > 0 como
Ua(t) =
0 t < a
1 t > a
Grafíquenla y obtengan L[Ua(t)]. Ahora vemos que la función esca-lón U (t) = U0(t), es la función de Heaviside en a = 0.
7. Sea L[ f (t)] = F(s) la Transformada de Laplace de la función f (t).Escriban la Transformada L[ua(t) f (t− a)] en términos de F(s)
Propiedades de la Transformada
Por ser una integral, la Transformada posee también las propieda-des de toda integral:
a. La Transformada de una suma es la suma de las transformadas
L[ f (t) + g(t)] = L[ f (t)] + L[g(t)]
b. Una constante multiplicativa sale afuera de la integral.
L[k. f (t)] = kL[ f (t)]
13 /22

Matemática III - 2◦ cuatrimestre 2015 guía 2 ecuaciones diferenciales de 2do orden 14
Transformada Inversa
Hay una relación 1 a 1 entre una función f (t) y su transformadaF(s), de tal modo que: dada una función f (t) existe una única transfor-mada F(s) y viceversa, dada una transformada F(s) existe una únicafunción original f (t) también llamada antitransformada:
f (t) = L−1[F(s)]
La antitransformada posee similares propiedades a la transformada:a. La Antitransformación es distributiva respecto de la suma.b. Una constante multiplicativa sale afuera de la integral.
Ejercitación �
1. Dadas las siguientes funciones F(s), hallar la transformada inversa,es decir, recuperar la f (t). Pueden consultar la tabla del Anexo III.
Para calcular Antitransformadas, bus-quen Laplace Inverse Transform en
http://www.wolframalpha.com
a) F(s) =1s3 b) F(s) =
1s+
1s2 −
1s + 3
c) F(s) =1
3s + 5
d) F(s) =2s
(s− 1)(s + 3)e) F(s) =
e−s
s3
Concepto previo: fracciones parciales. Pis-ta para el 1.d): descompone primero
s(s− 1)(s + 3)
=A
s− 1+
Bs + 3
. Verifi-
quen con la tabla del Anexo III.Transformada y Ecuaciones Diferenciales
Utilizaremos la Transformación Laplace para resolver EcuacionesDiferenciales lineales. El método es particularmente sencillo si los coe-ficientes de la Ecuación son constantes.
Ejemplo
Consigna: Halle la función y(x) solución del PVI.y′ − y = 1
y(0) = 1
mediante Transformación de Laplace.
Solución:a. Transformo la ecuación. Llamaremos F(s) = L[y] a la transfor-
mada de la solución y(x).
L[y′ − y] = L[1]L[y′]︸ ︷︷ ︸
−y(0)+sF(s)
−L[y]︸︷︷︸F(s)
= 1/s
Donde apliqué la transformada de y’. (Ver ejemplo en página 11)
−y(0) + sF(s)− F(s) = 1/s
14 /22

Matemática III - 2◦ cuatrimestre 2015 guía 2 ecuaciones diferenciales de 2do orden 15
teniendo en cuenta la condición inicial y(0) = 1
−1 + sF(s)− F(s) = 1/s
despejo la transformada F(s)
(s− 1)F(s) = 1/s + 1
F(s) =1/s
(s− 1)+
1s− 1
F(s) =1
s(s− 1)+
1s− 1
b. He obtenido la transformada de la solución y(x). Para obtener la Pueden consultar la Tabla de Transfor-madas en el Anexo III.solución, debo antitransformar.
L−1[F(s)] = L−1[1
s(s− 1)+
1s− 1
]
antitransformada de una suma:
= L−1[1
s(s− 1)]︸ ︷︷ ︸
b.1
+L−1[1
s− 1]︸ ︷︷ ︸
b.2
b.1= L−1[1
s− 1] = ex (La variable independiente es x en vez de t.) Cálculo de L−1[
1s(s− 1)
], mediante fraccio-
nes parciales:
1s(s− 1)
=As+
Bs− 1
multiplico por s(s− 1)
1s(s− 1)
s(s− 1) =As
s(s− 1) +B
s− 1s(s− 1)
1 = A(s− 1) + Bs
Resuelvo y hallo A = −1 y B = 1. Por lotanto
1s(s− 1)
= − 1s+
1s− 1
y L−1[1
s(s− 1)] = L−1[− 1
s] +
L−1[1
s− 1] = −1 + ex
b.2= L−1[1
s(s− 1)].
Puedo realizarlo mediante la técnica de fracciones parciales (ver co-lumna derecha), o mediante tabla. Del Anexo III (cambiando t→ x):
L[ eax − ebx
a− b] =
1(s− a)(s− b)
y comparo con1
s(s− 1).
Si elijo a = 0 y b = 1 queda:
L[ e0x − e1x
0− 1] =
1(s− 0)(s− 1)
L[−1 + ex] =1
s(s− 1)
−1 + ex = L−1[1
s(s− 1)] = b.2
c. La solución será b.1+b.2
y(x) = −1 + 2ex
Ejercitación �
Verifiquen la solución obtenida en el ejemplo para el PVI:y′ − y = 1
y(0) = 1
15 /22

Matemática III - 2◦ cuatrimestre 2015 guía 2 ecuaciones diferenciales de 2do orden 16
mediante los conocimientos de ecuaciones diferenciales del primermódulo. ¿Es necesario aplicar el método de separación de variableso de ecuaciones lineales?
Ejercitación �
Aplicando transformada de Laplace, halla la solución y(x) de lossiguientes problemas con valor inicial:
1. { y′′ − y = 1; y(0) = 0, y′(0) = 1
2. { y′′ − 3y′ + 2y = 0; y(0) = 1, y′(0) = 3
3. { y′′ + y′ = x; y(0) = 1, y′(0) = −1
4. { y′′ − 2y′ + y = 0; y(0) = 1, y′(0) = 0
Y con respecto a la pregunta inicial...
Miremos nuevamente la situación del resorte de la página 2...¿qué tipo de movimientos predice la ecuación diferencial
x′′ + cx′ + ω2x = 0
para el cuerpo unido a un resorte?Mirá los siguientes casos:
Caso I:
x′′ + 5x′ + 4x = 0
x(0) = 0
x′(0) = 1
Caso II:
x′′ + 2x′ + 5x = 0
x(0) = 0
x′(0) = 1
Caso III y ... ¿qué otros casos hay? ¿dónde podrías mirar información?
¿Qué utilidad tendrá esto?¿Cuál será la importancia de las vibraciones, oscilaciones y movi-
mientos ondulatorios para la Ingeniería?
16 /22

Matemática III - 2◦ cuatrimestre 2015 guía 2 ecuaciones diferenciales de 2do orden 17
Anexos
Anexo I: Condición de Existencia de la Transformada de Laplace
↪→ Definición
Función de orden exponencial. Se dice que una función f es de or-den exponencial en [0,+∞) si existen las constantes C y α, C positivo,tales que
| f (t)| ≤ Ceα t
para todo t ≥ 0.
Las condiciones para que la Transformada de Laplace exista (dadoque como toda integral impropia, puede no converger) están dadaspor el siguiente
⇒Teorema
Si una función f es de orden exponencial, entonces existe unα ∈ R tal que la transformada de Laplace de f , existe para α < s
17 /22

Matemática III - 2◦ cuatrimestre 2015 guía 2 ecuaciones diferenciales de 2do orden 18
Anexo II: Cálculo de la transformada de la función seno.
Ejemplo
Consigna: Obtengan la transformada L[sen(2t)]Solución: Debo calcular
F(s) = L[sen(2t)] = lı́mb→∞
∫ b
0sen(2t)e−stdt
a. Busco su antiderivada: Concepto previo: Integrales por partescíclicas.
Fórmula de Integral por partes:∫u.dv = u.v−
∫v.du
Aplico Integración por Partes. Elijo u = sen 2t y dv = e−s tdt∫sen(2t)e−stdt = sen(2t)
1−s
e−st −∫ 1−s
e−st cos(2t)2dt
= − sen(2t)1s
e−st +2s
∫e−st cos(2t)dt︸ ︷︷ ︸
Aqui aplico partes de nuevo
= − sen(2t)1s
e−st +2s
Elijo u=cos 2t dv=e−s tdt︷ ︸︸ ︷[cos(2t)
1−s
e−st −∫ 1−s
e−st(− sen(2t)2)dt]
Hay dos integrales iguales I
I︷ ︸︸ ︷∫sen(2t)e−stdt = − sen(2t)
1s
e−st − 2s2 cos(2t)e−st − 4
s2
I︷ ︸︸ ︷∫e−st sen(2t)dt
I = − 1s2 e−st [s sen(2t) + 2 cos(2t)]− 4
s2 I
Despejo la integral I:
I +4s2 I = − 1
s2 e−st [s sen(2t) + 2 cos(2t)]
I(
1 +4s2
)= − 1
s2 e−st [s sen(2t) + 2 cos(2t)]
I = − 1
1 +4s2
1s2 e−st [s sen(2t) + 2 cos(2t)]
I = − e−st
s2 + 4[s sen(2t) + 2 cos(2t)]
esta es la primitiva buscada
b. Ahora aplico Barrow:
18 /22

Matemática III - 2◦ cuatrimestre 2015 guía 2 ecuaciones diferenciales de 2do orden 19
Ib0 = − e−st
s2 + 4[s sen(2t) + 2 cos(2t)]b0
= − e−sb
s2 + 4[s sen(2b) + 2 cos(2b)] +
e−s0
s2 + 4[s sen(20) + 2 cos(2 0)]
= − e−sb
s2 + 4[s sen(2b) + 2 cos(2b)] +
1s2 + 4
[s0 + 21]
= − 1s2 + 4
e−sb [s sen(2b) + 2 cos(2b)] +2
s2 + 4
c. Paso al límite tendiendo a infinito:
lı́mt→∞
Ib0 = lı́m
t→∞− 1
s2 + 4e−sb︸︷︷︸→0
[s sen(2b) + 2 cos(2b)]︸ ︷︷ ︸Acotado entre dos números fijos
+2
s2 + 4
El producto señalado con llaves tiende a cero, por ser una funciónacotada y la otra que tiende a cero
=2
s2 + 4
Por lo tanto la transformada buscada es:
L[sen(2t)] =2
s2 + 4
19 /22
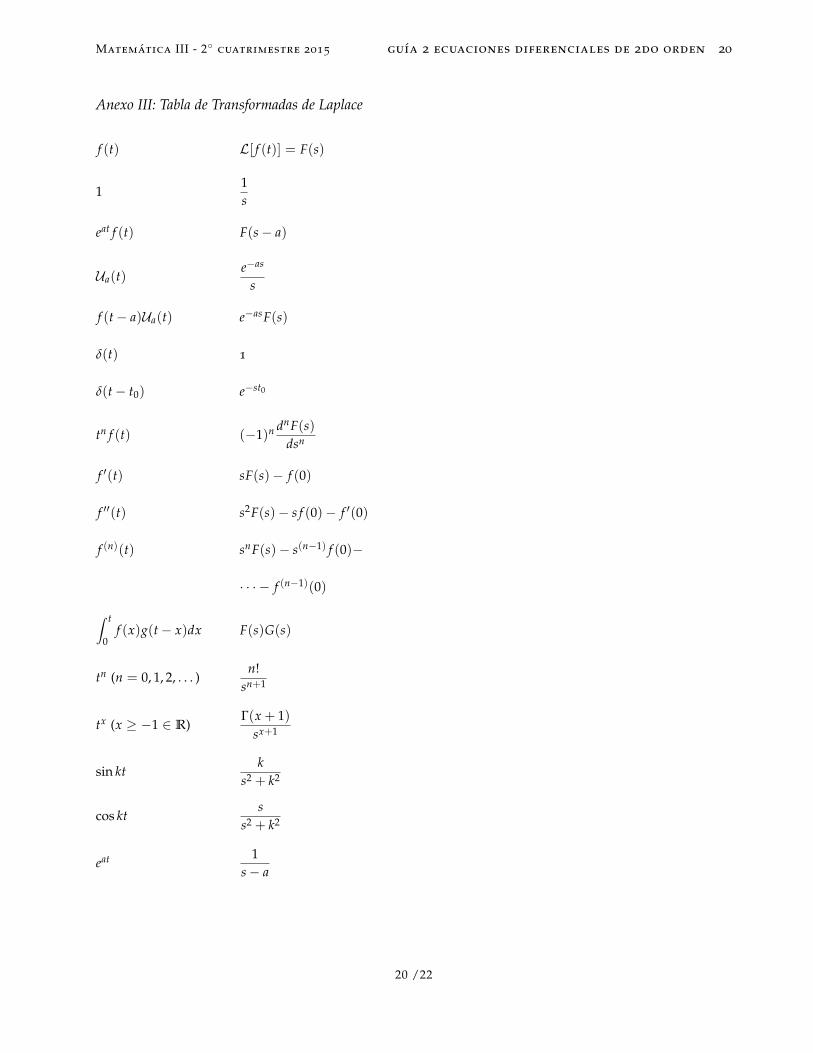
Matemática III - 2◦ cuatrimestre 2015 guía 2 ecuaciones diferenciales de 2do orden 20
Anexo III: Tabla de Transformadas de Laplace
f (t) L[ f (t)] = F(s)
11s
eat f (t) F(s− a)
Ua(t)e−as
s
f (t− a)Ua(t) e−asF(s)
δ(t) 1
δ(t− t0) e−st0
tn f (t) (−1)n dnF(s)dsn
f ′(t) sF(s)− f (0)
f ′′(t) s2F(s)− s f (0)− f ′(0)
f (n)(t) snF(s)− s(n−1) f (0)−
· · · − f (n−1)(0)
∫ t
0f (x)g(t− x)dx F(s)G(s)
tn (n = 0, 1, 2, . . . )n!
sn+1
tx (x ≥ −1 ∈ R)Γ(x + 1)
sx+1
sin ktk
s2 + k2
cos kts
s2 + k2
eat 1s− a
20 /22

Matemática III - 2◦ cuatrimestre 2015 guía 2 ecuaciones diferenciales de 2do orden 21
sinh ktk
s2 − k2
cosh kts
s2 − k2
eat − ebt
a− b1
(s− a)(s− b)
aeat − bebt
a− bs
(s− a)(s− b)
teat 1(s− a)2
tneat n!(s− a)n+1
eat sin ktk
(s− a)2 + k2
eat cos kts− a
(s− a)2 + k2
eat sinh ktk
(s− a)2 − k2
eat cosh kts− a
(s− a)2 − k2
t sin kt2ks
(s2 + k2)2
t cos kts2 − k2
(s2 + k2)2
t sinh kt2ks
(s2 − k2)2
t cosh kts2 − k2
(s2 − k2)2
sin att
arctanas
1√πt
e−a2/4t e−a√
s√
s
21 /22

Matemática III - 2◦ cuatrimestre 2015 guía 2 ecuaciones diferenciales de 2do orden 22
a
2√
πt3e−a2/4t e−a
√s
erfc(
a2√
t
)e−a√
s
s
2011 B.E.Shapiro integral-table.com. Licencia: Creative Commons Attribution-
NonCommercial-ShareAlike 3.0 Unported License.
22 /22

Guía 3A - Números ComplejosDiego Vallejo, Melina Podestá, Eva Almirón5 Mayo 2015
Ampliemos nuestras ideas sobre los Números
Hemos comenzado nuestra relación con los números por los nú-meros naturales N, aquellos que permiten contar la cantidad deelementos de un conjunto. Estos se pueden representar en una recta.
Los Naturales no alcanzan...
Pueden considerarse ecuaciones en los naturales del tipo x + 5 = 3.Podemos interpretar gráficamente la operación +5 o sea: “sumar
cinco” en la recta natural como “desplazarse 5 unidades a la dere-cha”.
Para resolverlas creamos una operación inversa de la suma llama-da diferencia. Lo inverso de “desplazarse 5 unidades a la derecha”será “desplazarse 5 unidades a la izquierda”, o sea “restar 5” de talmodo que la respuesta es x = 3 − 5. Sin embargo no hay ningúnnúmero natural x que esté 5 unidades a la izquierda de 3, o sea que3− 5 no existe en los números naturales (lo que es raro ya que 3− 2 síexiste y vale 1).
Creamos el número cero y los números negativos: −3,−2,−1, 0, yllamamos enteros Z a la unión de los negativos, el cero y los natu-rales. Toda resta de números enteros dará por resultado un númeroentero. Los negativos pronto tienen importantes aplicaciones, porejemplo para representar deudas en contabilidad.
... y tampoco son suficientes los Enteros...
Al introducir la operación de multiplicación, pasó algo similar alintentar resolver ecuaciones del tipo 4x = 3. Creamos la operacióninversa de la multiplicación, llamada división. Sin embargo no hayningún número entero x que multiplicado por 4 dé por resultado 3.Dicho de otro modo 3/4 no designa a ningún entero. Si sólo tuviéra-mos los números enteros, 3/4 no tiene sentido, siendo extraño ya que8/4 sí tiene sentido en los enteros, y vale 2.
Extendemos nuevamente la idea que poseemos de lo que es un nú-mero y creamos los números racionales Q que incluyen a los enterosy las fracciones cualesquiera. Cualquier división de números ente-ros, y también de números racionales, con divisor no nulo, dará porresultado un número racional.

UNAJ - 2015 Guía 3A - Números Complejos
... ni los Racionales, ni los Reales...
Luego definimos la operación de potenciación y al considerarpreguntas del tipo: ¿cuál es la longitud x del lado de un cuadrado cuyaárea mide 5? Escrita como ecuación queda: x2 = 5.
Creamos la operación inversa de la potencia: la radicación. Nue-vamente nos faltan números: ningún racional elevado al cuadradoda 5. El símbolo
√5 no tiene sentido en el mundo de los racionales.
Extendemos nuestros números para incluir a los irracionales y deno-minamos reales R a la unión de irracionales más racionales.
Aún así la radicación no puede realizarse para todos los númerosreales. Dado que ningún número real elevado al cuadrado puedeser negativo, la ecuación x2 = −1 no posee solución real. Dicho deotro modo la expresión
√−1 no tiene sentido en el conjunto de los
números reales.
Los imaginarios
Conviene, del mismo modo que lo hicimos antes, ampliar nueva-mente nuestro concepto de número para incluir aquellos que eleva-dos al cuadrado den números reales negativos.
Llamaremos a estos los números imaginarios.
Operación Operación inversa Conjunto que Genera Conjunto Unión Símbolosuma diferencia Negativos Naturales + Negativos + 0 = Enteros Z
producto división Fracciones Enteros + Fracciones = Racionales Q
potencia radicación Irracionales Racionales + Irracionales = Reales R
potencia radicación Imaginarios Reales + Imaginarios = Complejos C
Llamaremos C a la unión de los números reales R que ya cono-cíamos más los números Imaginarios, o sea, aquellos números raícescuadradas de números reales negativos, que, veremos son múltiplosreales de la unidad imaginaria que llamaremos i =
√−1
¿Qué es un número Complejo?
Del mismo modo que los anteriores conjuntos de números, quegeométricamente son un punto en una recta númérica, daremos unarespuesta geométrica también para estos nuevos números:
↪→ Definición
Un número complejo es un punto en el plano coordenado xy y a lavez, un vector que conecta el origen con el punto en el plano xy.
Por lo tanto, los números complejos tendrán dos coordenadascartesianas y se podrán escribir (x, y) o x + iy donde i =
√−1, y los
2 /7
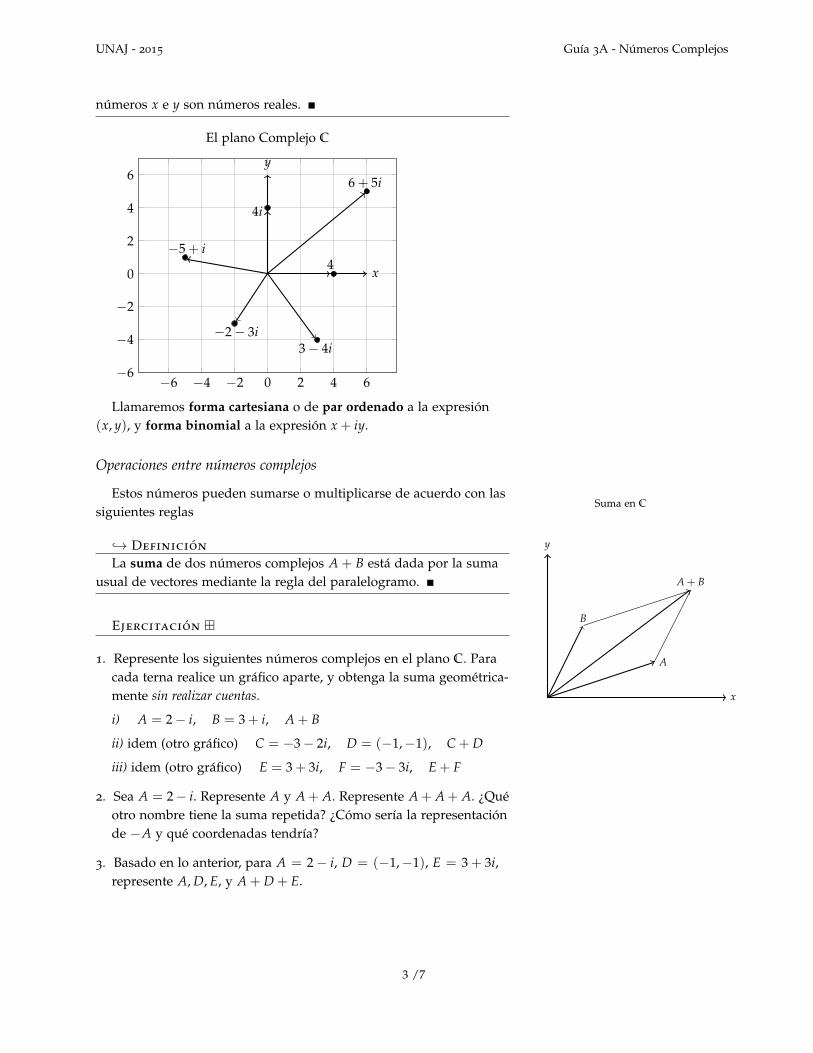
UNAJ - 2015 Guía 3A - Números Complejos
números x e y son números reales.
−6 −4 −2 0 2 4 6−6
−4
−2
0
2
4
6
4i
6 + 5i
4
3− 4i
−5 + i
−2− 3i
y
x
El plano Complejo C
Llamaremos forma cartesiana o de par ordenado a la expresión(x, y), y forma binomial a la expresión x + iy.
Operaciones entre números complejos
Estos números pueden sumarse o multiplicarse de acuerdo con lassiguientes reglas
↪→ Definición
La suma de dos números complejos A + B está dada por la sumausual de vectores mediante la regla del paralelogramo.
A
B
A + B
y
x
Suma en C
Ejercitación �
1. Represente los siguientes números complejos en el plano C. Paracada terna realice un gráfico aparte, y obtenga la suma geométrica-mente sin realizar cuentas.
i) A = 2− i, B = 3 + i, A + B
ii) idem (otro gráfico) C = −3− 2i, D = (−1,−1), C + D
iii) idem (otro gráfico) E = 3 + 3i, F = −3− 3i, E + F
2. Sea A = 2− i. Represente A y A + A. Represente A + A + A. ¿Quéotro nombre tiene la suma repetida? ¿Cómo sería la representaciónde −A y qué coordenadas tendría?
3. Basado en lo anterior, para A = 2− i, D = (−1,−1), E = 3 + 3i,represente A, D, E, y A + D + E.
3 /7

UNAJ - 2015 Guía 3A - Números Complejos
4. Es posible que la suma de dos números complejos en el III Cua-drante, dé por resultado un número en otro cuadrante?
5. ¿Qué aspecto tienen los números complejos que caen sobre el ejex? ¿Y los que están sobre el eje y?
6. Suma algebraica. Para sumar dos números complejos: A = a1 +
ia2 más B = b1 + ib2, existe una regla algebraica: A + B = (a1 +
b1) + i(a2 + b2). Verifique que la regla es equivalente a la regla delparalelogramo.
↪→ Definición
El producto de dos números complejos AB es un número complejocuya longitud es el producto de las longitudes de A y de B, mientrasque el ángulo será la suma de los ángulos de A y de B.
Ejercitación �
1. Represente cada terna de números complejos en un gráfico aparte.Obtenga los resultados geométricamente sin realizar cuentas.
i) A = 2− i, B = 3, AB.
¿Es coherente con lo obtenido en el ítem 2 de la ejercitación ante-rior? (página 3)
ii) C = −2 + 2i, D = (0, 2), CD
iii) E = i, F = i, EF ¿Puede decir en castellano cuál es elefecto sobre un número complejo cualquiera de multiplicar por i?
2. Sea un número complejo A cuyo vector que forma 30◦ con el eje x.Qué ángulo formará el número iA con el eje x? ¿y el número i2 A?
3. Producto algebraico. Verifique que la regla para multiplicar dosnúmeros complejos: A = a1 + ia2 y B = b1 + ib2 y que da por resul-tado AB = (a1b1 − a2b2) + i(a2b1 + a1b2) puede obtenerse haciendoAB = (a1 + ia2)(b1 + ib2) y suponiendo que son aplicables laspropiedades usuales de la suma y producto. Debe recordarse quei2 = −1. Si no le sale pruebe primero con ejemplos numéricos.
4. Aplique la regla anterior para obtener el producto AB, dondeA = (2, 3/2) y B = (1, 1). Grafique los tres vectores A, B, y ABy con regla y trasportador mida lo que precise en el gráfico paraverificar que se cumple la definición de producto de complejos.
4 /7

UNAJ - 2015 Guía 3A - Números Complejos
Notación
Veamos alguna terminología según la figura y la tabla siguiente
Nombre Significado SímboloCantidades:1. módulo de z Longitud de z |z| = ρ
2. argumento de z ángulo de z arg(z) = θ
3. parte real de z coordenada x de z Re(z) = x4. parte imaginaria de z coordenada y de z Im(z) = y5. conjugado de z reflexión de z en el eje real z̄
Además:número imaginario un múltiplo real de ieje imaginario el conjunto de los imaginarioseje real el conjunto de los números reales R
En el dibujo introdujimos una nueva manera de escribir un núme-ro complejo: la forma polar: z = ρ∠θ, donde ρ es el módulo y θ elángulo de z
Ejercitación �
1. Grafique los siguientes números y halle primero geométricamentey luego algebraicamente su módulo y su ángulo.
a) A = 2− 2i b) B = −i c) C = 3 d) D = 0 (este es elnúmero complejo 0 + 0i, ¿qué dificultades tiene con este número?¿cómo dibujaría su vector?)
5 /7

UNAJ - 2015 Guía 3A - Números Complejos
2. Grafique los siguientes números en el mismo plano y halle pri-mero geométricamente y luego algebraicamente su parte real y suparte imaginaria.
a) A = 3∠π
4b) B = 1∠π c) C = 2∠0 d) D = 1∠3π
e) ¿Qué relacion hay entre B y D? ¿Qué conclusión puede obtenerpara todos los números de la forma:
ρ∠θ, ρ∠(θ + 2π), ρ∠(θ + 4π), ..., ρ∠(θ − 2π)...?
3. Halle gráficamente para cada número z de los ejercicios 1. y 2. suconjugado z̄.
4. Mirando los ejemplos del ejercicio anterior, obtenga una expresiónpara hallar el conjugado de cualquier número z = x + iy
5. Puede ver geométricamente si el producto de dos números realespuros (aquellos donde Im(z) = 0) da por resultado un real puro?Considere que los reales pueden ser positivos o negativos. ¿Quépasará con el producto de dos imaginarios puros?
6. Qué hay de malo en afirmar Im(z) = 2i ?
7. ¿Qué significa esta fórmula: (ρ1∠θ1)(ρ2∠θ2) = (ρ1ρ2)∠(θ1 + θ2) ?
8. ¿Podría decir en castellano cuál es el efecto sobre un complejocualquiera z de multiplicarlo por ρ∠θ?
9. Demuestre primero geométricamente y luego con manipulacionesalgebraicas que:
a) Re(z) =12(z + z̄)
b) Im(z) =12i(z + z̄)
c) |z| =√
x2 + y2
d) zz̄ = |z|2
e) ρ∠θ = ρ(cos θ + i sen θ)
f ) Definamos a1z
como el número que multiplicado por z da la
unidad: (1z)z = 1. Muestre que 1/z =
1ρ∠θ
=1ρ∠(−θ)
g)1
x + iy=
xx2 + y2 − i
yx2 + y2
h) (1 + i)4 = −4
i) ρ∠θ = ρ∠(−θ)
j) Desigualdad triangular: |z + w| ≤ |z|+ |w| ¿En qué circunstan-cia se verifica la igualdad?
6 /7

UNAJ - 2015 Guía 3A - Números Complejos
Llamaremos forma Trigonométrica a la expresión:
ρ(cos θ + i sen θ) = ρ∠θ
que aparece en el punto 9e) de la ejercitación anterior. Permite obte-ner la forma binomial a partir del módulo y argumento de z.
7 /7
Guía 3B - Curvas y Regiones en el Plano Complejo.Fórmula de EulerDiego Vallejo, Melina Podestá, Eva Almirón5 Mayo 2015
Curvas y Regiones en el plano
Situación ^Suponga que utilizamos el plano Complejo para representar el ma-
pa de un país. Los ejes están graduados en kilómetros. La ciudadCapital Buenos Vientos está en B = 0. Mar del Platino está enM = 100 − 300i. Vuriloche está en V = −800 − 500i. Queremoshacer un viaje desde B, pasando por M, para llegar a V.
Responda gráficamente. Además realice un cálculo analítico en losejercicios marcados con el signo [
⊕]:
1. Grafique las tres ciudades en el plano C.
2. En la primera etapa B → M, ¿puede seguir la ruta de ecuación En el plano xy, ¿cómo es la ecuación deuna recta paralela al eje x? ¿y de unaparalela al eje y? ¿y de una recta quepasa por dos puntos?
Re(z) = 0 ? ¿Y la ruta cuya ecuación es Re(z) = 2 Im(z)?
¿Podría responder cuál es la ecuación de la ruta recta que conectadichas dos ciudades? [
⊕]
3. Graficá los puntos del plano que cumplen la condición Im(z) = 1.Ahora ¿podrías graficar la región Im(z) ≥ 1? En este viaje, ¿esnecesario pasar por esa región? ¿Y por Re(z) ≤ 1/3 Im(z)?
4. De la tabla de la guía anterior ¿cuál propiedad de los númeroscomplejos mide la distancia de z al origen, en este caso, la distan-cia a la ciudad de Buenos Vientos?
[⊕]¿Qué distancia hay entre B y M?
¿qué nombre recibe el conjunto de todos los puntos que están adistancia 1 del origen? ¿Cuál es su ón cartesiana xy en el planoR2? ¿y a distancia r? ¿Qué relación tiene esto con la cantidad |z|?
5. Y ¿si quisiéramos saber la distancia entre Vuriloche y Mar delPlatino? ¿Qué ventajas y desventajas tiene responder esta preguntagráficamente vs. algebraicamente?
6. ¿Cómo se calcula la distancia entre dos números complejos v =
v1 + iv2 y w = w1 + iw2 ? Deduzca una fórmula que permitacalcularla aprovechando lo trabajado en los ejercios anteriores.
7. Supongamos que en la primera etapa B → M, recorremos 100
kilómetros en linea recta, a partir de la ciudad de Buenos Vientos,

UNAJ - 2015 Guía 3B - Curvas y Regiones en el Plano Complejo. Fórmula de Euler
sin fijarnos hacia donde nos dirigimos. Grafique los lugares delplano z = x + iy en los cuales podríamos estar. Qué condición secumple allí? Podría decir algo de su argumento? Y de su módulo?Complete la ecuación del lugar geométrico donde nos podemoshallar:
|z| = ...
8. Continuamos nuestro viaje y determinamos mediante GPS queestamos a 8 kilómetros de Mar del Platino. Dibuje la región. ¿Quérelación tiene esto con la ecuación
|z−M| = 8
?
9. Calcule la longitud mínima que demanda todo el viaje en kilóme-tros, suponiendo que viajamos en linea recta en cada etapa.
10. Nos dicen que el país entero es una región descripta por la si-guiente desigualdad
|z| ≤ 1000
[⊕]¿la ciudad de Vuriloche queda dentro del país?
11. Grafique la región que está a una distancia de Buenos Vientosmayor que 2 kilómetros y menor o igual que 6 kilómetros.
12. ¿Cuál es la zona que cumple 100 < |z − V| ? Descríbala encastellano.
13. ¿Cuál es la zona que verifica arg(z) = 3π/4?
14. ¿Cuál es el argumento de V? [⊕].
15. La ciudad de M ¿está en la regiónπ
2≤ arg(z) ≤ 3
2π ?
16. Represente la región dada en notación de conjuntos por:
a) R1 = {2 ≤ |z| ≤ 4∧ 3π
4≤ arg(z) ≤ 5
3π}
b) R2 = {|z− 1 + i| < 4∧ arg(z) =56
π}
En resumen, la distancia entre dos números complejos z y w estádada por d = |z− w|
Ejercitación �
1. Describa mediante inecuaciones cada una de las siguientes zonasde color blanco utilizando las propiedades de z: Re(z), Im(z),arg(z), |z|.
2 /5

UNAJ - 2015 Guía 3B - Curvas y Regiones en el Plano Complejo. Fórmula de Euler
Fórmula de Euler
Recordemos que una función exponencial, es aquella proporcionala su derivada: la función y = ekx verifica la ecuación diferencialy′ = ky, donde k es un número real.
¿Qué ocurre si sostenemos la validez de la ecuación anterior paravalores imaginarios de k? Por ejemplo, para k = i:
ddt
eit = eit
Aquí la función depende de la variable t, que conviene, para loque sigue, identificar con el tiempo.
El carácter vectorial de los números complejos nos permitió utili-zarlos para marcar posiciones en el mapa de un país.
Ahora permitiremos que esos vectores posición puedan depen-der del tiempo. El movimiento de una partícula en un plano, puededescribirse por un número complejo z en función del tiempo t. Escri-biremos z(t) = x(t) + iy(t) a esa función. esto es análogo a las curvas paramétri-
cas donde el vector se escribía~r(t)Estudiemos el movimiento de una partícula dado por:
z(t) = eit [función posición]
.
Notemos que la posición inicial es z(0) = e0t = 1 en el eje real.Podemos calcular la velocidad por derivación:
v(t) = z′(t) = eit.i = iz
O sea que el vector velocidad es siempre perpendicular al vector posi-ción, girado un cuarto de vuelta (π/2) en sentido antihorario. Para laaceleración, análogamente,
a(t) = v′(t) = ieit.i = i2z = −z(t)
3 /5

UNAJ - 2015 Guía 3B - Curvas y Regiones en el Plano Complejo. Fórmula de Euler
La aceleración es el vector opuesto al de posición.Podemos escribir que z′′ = −z o z′′ + z = 0. Esta es una ecuación
diferencial que ya hemos estudiado para funciones de una variable.Recordemos que sus soluciones son senos y cosenos de la variableindependiente, t en este caso. Comenzamos con una función ex-ponencial para descubrir que contiene de algún modo a funcionestrigonométricas.
¿Qué características tiene este movimiento?Este se estudia en Física básica. Se trata del movimiento circular de
radio a cuyas ecuaciones son x(t) = a cos t, y(t) = a sen tEl radio a = 1 ya que la posición inicial es z(0) = 1.Por lo tanto hemos obtenido una nueva función vector posición:
z(t) = x(t) + iy(t) = cos(t) + i sen(t). Igualándola con la [funciónposición] obtenemos la
eit = cos(t) + i sen(t) [fórmula de Euler]
donde t es cualquier número real.
Recordando que un número complejo z de módulo |z| = ρ y ar-gumento arg(z) = θ puede escribirse en forma trigonométrica comoz = ρ(cos θ + i sen θ), reemplazando el paréntesis por la fórmula deEuler, queda escrito en forma exponencial:
z = ρeiθ
Esta fórmula permite escribir de una manera intuitiva la regla paramultiplicar a un complejo z = reiθ por uno w = Reiφ:
z = reiθ Reiφ = rRei(θ+φ)
Ejercitación �
Responda primero gráficamente y luego haga las cuentas:
4 /5

UNAJ - 2015 Guía 3B - Curvas y Regiones en el Plano Complejo. Fórmula de Euler
1. Grafique y pase a forma exponencial
a) A = 1 b) B = 1− i c) C = 0
2. Grafique y pase a forma binómica:
a) A = 4eiπ b) B = 3ei5π/3 c) C = 1ei0
† Para los siguientes ejercicios resuelva gráficamente y luego escriba enforma exponencial y haga las cuentas.
3. La ecuación z2 = −1, tiene solución? Hállela o hállelas si existen.¿Y qué pasa con z2 = 1?
4. ¿Cuántas soluciones tiene z3 = 1? Hállelas. Idem z3 = i?
5. Idem z4 = 1. ¿Qué opina que pasará con las soluciones de laecuación zn = 1?
6. Por propiedades de la exponencial: (eiθ)2 = ei2θ . Reemplace utili-zando la fórmula de Euler y encuentre relaciones trigonométricasentre cos θ, sen θ, cos 2θ y sen 2θ. ¿Podría repetir este procedimien-to para (eiθ)n = einθ con n ∈N tan grande como se quiera?
5 /5

Guía 3C - Derivada ComplejaDiego Vallejo, Melina Podestá, Eva Almirón.15 Mayo 2015 Esta guía se escribió teniendo en cuenta
aportes del Dr. Octavio Miloni
Función compleja
Hasta ahora consideramos varios tipos de funciones numéricastales como:
y = f (x), las funciones de una variable real que devuelven unavariable real, (ejemplo y = x2),
z = f (x, y) funciones de dos variables reales, que devuelven unavariable real, (ejemplo z = x + y2)
z = z(t) funciones de una variable real que devuelven una variablecompleja (z = eit en la guía anterior).
Ahora consideraremos una función que asigna un número comple-jo w a otro número complejo z. La anotaremos w = f (z).
Gráficamente
↪→ Definición
Una función de variable compleja f : D ⊂ C → C es una reglaw = f (z) que asigna uno y solo un número número complejo wa cada z en el dominio D de f . El Dominio es una parte o todo elconjunto C.
El Dominio D es -análogamente a funciones reales- el conjuntodonde f (z) está definida.
Como tanto z y w son complejos, la función puede escribirse comow = u + iv = f (x + iy) con lo que nos permite escribir las funcionescomplejas de la forma
f (x + iy) = u(x, y) + iv(x, y) [función en forma binómica]
lo que nos lleva nuevamente al estudio de funciones reales, ya quepor definición, las partes real e imaginaria de un número complejo,

UNAJ - 2015 Guía 3C - Derivada Compleja
son números reales. Ahora tenemos entonces u(x, y) y v(x, y), queson dos funciones reales de dos variables.
Ejemplo
Dada f (z) =i
1− zhalle a) f (1 + i), y b) Dominio de f .
a) Valor de f evaluada en z = 1 + i:
f (1 + i) =i
1− (1 + i)=
ii= 1
b) Es más corto primero hallar los valores de z donde f no está
definida. Observando la definición: f (z) =i
1− zvemos que hay un
denominador, lo igualamos a cero: 1− z = 0, o sea z = 1 no está en eldominio. El resto de los valores de z son aceptables. Por lo tanto:
Dom( f ) = {z ∈ C|z 6= 1}
Ejercitación �
1. Sea f (z) = z(2− z). Encuentra los valores de w = f (z) correspon-dientes a
a) z = 1 + i b) z = 2− 2i c) z = i
2. Para cada una de las siguientes funciones, halla su Dominio:
a) f (z) =1
z2 + 1b) f (z) = arg
(1z
)c) f (z) =
zz + z
d) f (z) =1
1− |z|
Ejemplo
Veamos la función f (z) = z2.
Tenemos que
w = (x + iy)2 = x2 + (iy)2 + 2ixy = (x2 − y2) + i(2xy)
2 /13

UNAJ - 2015 Guía 3C - Derivada Compleja
con lo que u(x, y) = x2 − y2
v(x, y) = 2xy
Sin embargo esta forma de escribirla no revela las características dez2. Representémosla en coordenadas polares, ρ, θ de la forma
w = f (z) = f (ρeiθ) = R(ρ, θ).eiφ(ρ,θ)) [función en forma exponencial]
Para z2 tenemos
w = z2 = (ρeiθ)2 = ρ2ei2θ
Preguntas:
1. ¿Cómo es que la última ecuación permite saber las propiedades dez2 mucho más fácilmente que la forma binomial?
2. Comprueba que pasando a coordenadas x, y obtenemos las u(x, y)y v(x, y) anteriormente obtenidas.
3. ¿Cómo sería escrita en forma exponencial la función f (z) = z3?¿Qué es lo que le hace a un número ρeiθ?
4. Un cuadrado ABCD en el plano complejo tiene a A(0, 0), B(1, 0),C(1, 1) y D(0, 1) como vértices. Determina la región en el plano uven el que ABCD es transformado por la función w = z2.
Límites y Continuidad
Límites
Aprovechando la interpretación de que una función de variablecompleja puede entenderse como un par de funciones de dos varia-bles reales, la definición de límite será basada en las ya estudiadaspara funciones de dos variables. Así:
↪→ Definición
Límite: Dada una función w = f (z) = u(x, y) + iv(x, y), decimos que
lı́mz→z0
f (z) = L = L1 + iL2
si y sólo si se cumplen las siguientes condiciones
lı́m(x,y)→(x0,y0)
u(x, y) = L1 y lı́m(x,y)→(x0,y0)
v(x, y) = L2
3 /13

UNAJ - 2015 Guía 3C - Derivada Compleja
es decir que los límites de las partes reales e imaginarias de f ambospor separado existen.
Para nuestro análisis, esta definición essuficiente. Para mayores detalles sobrelímites y continuidad ver los libros de labibliografía de la materia.
La analogía que hay en esta definición con el concepto de Límiteen funciones de 1 variable no es completa. Del mismo modo que es-tudiaron para funciones de dos variables f (x, y) en R2, hay infinitostrayectos planos que pasan por el número z0 en C, mientras que haysólo dos maneras de acercarse al número x0 en la recta real.
Continuidad
↪→ Definición
Continuidad: Dada una función w = f (z) decimos que f es conti-nua en z = z0 si y sólo si se cumplen las tres condiciones siguientes:
1. Existe el lı́mz→z0 f (z)
2. Existe f (z0)
3. Ambas, límite y función son iguales: lı́mz→z0 f (z) = f (z0)
Esta definición implica la existencia del límite lı́mz→z0 f (z) y laexistencia de la función en z0.
Ejemplo
1. Estudiemos la continuidad de f (z) = Im(z) en z = 3− i.
1. Precisamos que exista lı́mz→3−i Im(z).
Escribiendo z = x + iy, queda que Im(z) = y. Además cuandoz → 3− i, es (x, y) → (3,−1), o sea x → 3 e y → −1. Por lo tantolı́mz→3−i Im(z) = lı́mz→3−i y = −1 alguno pensó que el límite valía −i ?
se verifica
2. f (3− i) = Im(3− i) = −i.Se verifica.
3. f (3− i) = lı́mz→3−i Im(z)
2. Estudiemos la continuidad de f (z) = Im(z) en cualquier z0 ∈ C.
4 /13

UNAJ - 2015 Guía 3C - Derivada Compleja
1. Precisamos que exista lı́mz→z0 Im(z).
Escribiendo z = x + iy, y z0 = x0 + iy0 queda que Im(z) = y.Además cuando z → z0, es (x, y) → (x0, y0), o sea x → x0 ey→ y0. Por lo tanto lı́mz→z0 Im(z) = lı́mz→z0 y = y0
se verifica
2. f (z0) = Im(x0 + iy0) = y0. y0 es un número real puro, imaginariopuro o ninguna de las dos opciones?Se verifica.
3. f (z0) = lı́mz→z0 Im(z)
Ejercitación �
1. Estudie la continuidad de la función f (z) en el punto z0
a) f (z) = Re(z) en z0 = 0. ¿Hay algún z0 donde f sea disconti-nua?
b) f (z) = z en z0 = 1 ¿Hay algún z0 donde f sea discontinua?
c) f (z) = x2 + iy2 en z0 = 0. ¿Hay algún z0 donde f sea disconti-nua?
Definiremos las funciones coseno, seno, coseno hiperbólico y senohiperbólico de la variable compleja z:
cos(z) =eiz + e−iz
2sen(z) =
eiz − e−iz
2i
cosh(z) =ez + e−z
2, senh(z) =
ez − e−z
2
2. Escribe las siguientes funciones como f (z) = u(x, y) + iv(x, y),donde z = x + iy
a) f (z) =z
z + ib) f (z) = Im(z) c) f (z) = z(1 + z)
d) f (z) = |ez| e) f (z) = cos(iz) f) f (z) = sen(z)g) f (z) = cosh(z)
(¿Qué relación hay entre cos(iz) y cosh(z)?)
5 /13

UNAJ - 2015 Guía 3C - Derivada Compleja
Derivación
La derivada se define análogamente a lo ya estudiado en matemá-tica previa.
↪→ Definición
Sea f : D ⊂ C → C una función compleja de variable compleja.Sea z0 ∈ D. La derivada de f en z0 es:
f ′(z0) = lı́mh→0
f (z0 + h)− f (z0)
h
Sin embargo notemos que a diferencia de la derivación en el cam-po de las funciones reales, aquí h no es un número real, sino unnúmero complejo.
Ejemplo
Sea f (z) = z2. Calculemos la derivada en algún punto z0 genérico. En este ejemplo notemos que loscálculos son formalmente los mismosque para obtener la derivada de f (x) =x2 función de una variable real.
Por definición:
Debido a la analogía con la teoría devariable real, se conservan las reglas dederivación. Esto es:
1. Constante [C]′ = 0
2. [C f (z)]′ = C f ′(z)
3. Potencia [zn]′ = nzn−1 n 6= 0
4. Cadenad fdx
=d fdu
dudx
5. Suma [ f (z) + g(z)]′ = f ′(z) + g′(z)
6. Producto [ f (z)g(z)]′ = f ′(z)g(z) +f (z)g′(z)
7. Cociente
f ′(z0) = lı́mh→0
f (z0 + h)− f (z0)
h
= lı́mh→0
(z0 + h)2 − z20
h
= lı́mh→0
z20 + 2z0h + h2 − z2
0h
= lı́mh→0
2z0h + h2
h
= lı́mh→0
h(2z0 + h)h
= lı́mh→0
2z0 + h = 2z0
En general escribiremos f ′(z) = 2z en analogía con variable real.
Para funciones derivables, es decir que el límite existe, las propie-dades son exactamente las mismas que para funciones reales.
La analogía con funciones reales no es completa.Qué operaciones no tienen análogo real?. Ya se imaginarán, son
aquellas tales como: Re Im, arg, z, |z|. Si aparecen en una fórmula yano puedo aplicar la analogía real
6 /13

UNAJ - 2015 Guía 3C - Derivada Compleja
Ejemplo
La función f (z) = z, ¿es derivable en algún punto de C?Veamos, por definición: Verifiquen gráficamente que el conju-
gado de una suma es la suma de losconjugados.
f ′(z) = lı́mh→0
f (z + h)− f (z)h
= lı́mh→0
z + h− zh
= lı́mh→0
z + h− zh
= lı́mh→0
hh
Recordemos que h no es real, sino Complejo. Escribamos h = x + iy.Dado que h → 0, (x, y) → (0, 0), por infinitas trayectorias. Para queexista el límite debe valer lo mismo por cualquier trayecto. Elijamosdos sencillos.
El primero es por la ruta 1, donde y = 0 (eje x). Por lo tanto h =
x + 0i, y h = x− 0i = h, (¿podría responder en el gráfico porqué si unnúmero es real puro, entoces es igual a su conjugado?) entonces
f ′(z) = lı́mh→0
hh= lı́m
h→01 = 1
Ahora eligiendo acercarnos al origen por la ruta 2 donde x = 0 (ejey), h = 0 + yi, y h = 0− yi = −h (¿podría responder en el gráficoporqué si un número es imaginario puro, entoces es opuesto a suconjugado?),
f ′(z) = lı́mh→0
−hh
= lı́mh→0−1 = −1
Dado que por dos trayectos diferentes el límite da valores diferentes,concluimos que el límite no existe. Por lo tanto, la función f (z) = zno es derivable en ningún punto del plano C.
No siempre es cómodo volver a la definición del límite para che-quear si una función es derivable o no. Daremos otras condicionesmás sencillas en general para chequear la derivabilidad en el siguien-te: Pueden ver una justificación de estas
ecuaciones en el Anexo en la página 12.
⇒Teorema
7 /13

UNAJ - 2015 Guía 3C - Derivada Compleja
Teorema: Condiciones de Cauchy-Riemann. Sea una funciónf (z) = u(x, y) + iv(x, y). Supongamos que f ′(z) existe en unpunto z0 = x0 + iy0. Entonces se cumplen las dos afirmacionessiguientes:
A. Existen las cuatro primeras derivadas parciales de u y de v:
ux, uy, vx, vy
yB. Son válidas en z0 las condiciones de Cauchy-Riemann (CR):
(1) ux = vy
(2) uy = −vx
Además, en caso que exista la derivada, ésta puede calcularsemediante:
f ′(z) = ux + ivx
La recíproca es también válida: es suficiente que satisfaga las condi- La demostración está fuera del alcancede nuestro curso.ciones (1) y (2) para que la función sea derivable.
En resumen:⇒ si las condiciones de CR se satisfacen en z0, la función f (z) será
derivable en z0. Y viceversa:⇐ si la función f (z) es derivable en z0, entonces, se verifican las condi-
ciones de CR en z0.
Ejemplo
1. Retomemos la función f (z) = z que vimos en el ejemplo de lapágina 7. Veamos si se satisfacen las ecuaciones (1) y (2) de CR.
a) Hallamos u y v, donde z = x + iy,
f (z) = z = x + iy = x− iy. Comparando con f (z) = u + iv vemos
que
u = x
v = −y
b) Hallo las cuatro derivadas parciales:
ux = 1 uy = 0
vx = 0 vy = −1
Vemos que no se cumple la condición (1) de CR ya que ux 6= vy.
8 /13

UNAJ - 2015 Guía 3C - Derivada Compleja
La condición (2) sí se cumple, pero por sí sola no es suficiente paragarantizar derivabilidad. Esto es coherente con el análisis que
hicimos a partir de la definición deDerivada como Límite en pág. 7
Conclusión: f (z) = z no es derivable en punto alguno de C.
2. Halle en qué conjunto numérico la función g(z) = x2 − iy2 esderivable.
a) En este caso
u = x2
v = −y2
b) Hallo las cuatro derivadas parciales:
ux = 2x uy = 0
vx = 0 vy = −2y
Vemos que al igual que el anterior ejemplo la condición (2) severifica: uy = −vx y reemplazando: 0 = −0 Verificada.
Veamos la condición (1): ux = −vy. Reemplazando: 2x = −2y osea x = −y. Evidentemente esta no se verifica en todo C. Solamentesi y = −x, o sea en el lugar geométrico de una recta que pasa por elorigen siendo la bisectriz por el 2do y 4to cuadrante.
Por lo tanto g(z) es derivable en {z ∈ C| Im(z) = −Re(z)}
Analiticidad
Necesitamos una idea previa: Un entorno de un punto z0 es uncírculo centrado en z0. No nos va a importar su radio siempre quetenga un radio mayor que cero.
Propiedades:
1. Un entorno no es un punto.
2. Un entorno no cabe dentro de una curva.
3. Un entorno sí cabe en una figura con área, no importa que tanchica sea ésta, por ejemplo cabe dentro de cualquier otro entorno.
4. Un entorno tiene área.
5. Un entorno de z0 rodea por todos ”lados” a z0.
6. Un entorno de z0 contiene a z0.
↪→ Definición
Función Analítica. Si una función f (z) admite derivada en algúnentorno de un punto z0, entonces diremos que f (z) es analítica en z0.
9 /13

UNAJ - 2015 Guía 3C - Derivada Compleja
Ejemplo
1. Retomemos la función f (z) = z que vimos antes. Como f (z) = zno es derivable en punto alguno de C, por tanto f (z) no es analíticaen ningún lugar de C.
2. Volvamos a g(z) = x2 − iy2. Vimos en el ejemplo anterior que g(z)es derivable en {z ∈ C| Im(z) = −Re(z)}
Este lugar geométrico es una línea recta donde no cabe ningúnentorno (propiedad 2 de la pág. 9). Por tanto g(z) no es analítica enningún lugar de C.
3. Volvamos a f (z) = z2. Hemos calculado el límite del cocienteincremental en el ejemplo de la página 6 y vimos que es derivableen todo C. Por lo tanto como para todo punto z0 hay un entornodel mismo donde la función es derivable, f (z) es analítica en todo C.
Ejercitación �
1. Supongamos que una función f (z) es derivable en un conjuntoD ⊂ C y es analítica en un conjunto A ⊂ C.
Podría ocurrir que A esté incluído en D? Porqué?
2. Diga, para cada caso, donde es derivable y dónde es analítica lafunción f (z) que verifica las condiciones de CR en...
a) ... {z ∈ C | Re(z) = 1}.
b) ... {z ∈ C | Re(z) < Im(z)}.
c) ... {z ∈ C | |z| = 1}.
d) ... {z ∈ C | |z| > 1}.
3. Estudia la derivabilidad de las siguientes funciones. Determina,además, la analiticidad.
a) f (z) = x2 + iy2,
b) f (z) = x2 + 2x− iy,
4. Un polinomio en la variable z, ¿dónde es derivable? ¿dónde esanalítico?
5. La función f (z) = ez ¿es derivable en algún punto? ¿es analítica enalgún punto?
10 /13

UNAJ - 2015 Guía 3C - Derivada Compleja
6. La suma de dos funciones analíticas en un conjunto A (incluido enC). ¿Será analítica en A?
7. Para cada caso, halla∂u∂x
,∂u∂y
,∂v∂x
,∂v∂y
(vean lo que realizaron en la
página 5).
a) f (z) =z
z + ib) f (z) = Im(z) c) f (z) = z(1 + z)
e) f (z) = sen(z) f) f (z) = cosh(z)
Para cada caso responda:
¿Se verifican en algún conjunto las condiciones de CR?
¿Qué puede decir acerca de la derivabilidad?
¿Qué puede decir de la analiticidad?
11 /13

UNAJ - 2015 Guía 3C - Derivada Compleja
Anexo: Deducción de las Ecuaciones de Cauchy-Riemann
Calculemos la derivada de la función f (z) en el punto z0. Para ello, co-mencemos por la definición
f ′(z0) = lı́mh→0
f (z0 + h)− f (z0)
h
Si consideramos la función f (z) = u(x, y) + iv(x, y), h = h1 + ih2 podemosescribir
z0 + h = x0 + h1 + i(y0 + h2)
Entonces,
f (z0 + h) = u(x0 + h1, y0 + h2) + iv(x0 + h1, y0 + h2)
Calculemos la variación ∆ f = f (z0 + h)− f (z0):
∆ f = u(x0 + h1, y0 + h2) + iv(x0 + h1, y0 + h2)− (u(x0, y0) + iv(x0, y0))
agrupando parte real y parte imaginaria:
= [u(x0 + h1, y0 + h2)− u(x0, y0)] + i[v(x0 + h1, y0 + h2)− v(x0, y0)]
Ahora obtengamos el cociente incremental∆ fh
:
∆ fh
=u(x0 + h1, y0 + h2) + iv(x0 + h1, y0 + h2)− (u(x0, y0) + iv(x0, y0))
h1 + ih2agrupando parte real y parte imaginaria:
=u(x0 + h1, y0 + h2)− u(x0, y0)
h1 + ih2+ i
v(x0 + h1, y0 + h2)− v(x0, y0)
h1 + ih2
Ahora, el límite (h1, h2) → (0, 0) debe ser igual para cualquier caminoque nos lleve al origen. Repitiendo lo realizado en el ejemplo de la página7 si nos acercamos al origen por el eje y (h2 = 0) o por el eje y (h1 = 0)tendremos:a. Camino horizontal (eje x) h2 = 0:
∆ fh
=u(x0 + h1, y0)− u(x0, y0)
h1+ i
v(x0 + h1, y0)− v(x0, y0)
h1
Asumiendo la existencia del límite, tenemos
f ′(z0) =∂u∂x
(x0, y0) + i∂v∂x
(x0, y0)
b. Camino vertical (eje y) h1 = 0:
∆ fh
=u(x0, y0 + h2)− u(x0, y0)
ih2+ i
v(x0, y0 + h2)− v(x0, y0)
ih2
Asumiendo la existencia del límite, tenemos Recuerden que por definición dederivada parcial,
lı́mh2→0
u(x0, y0 + h2)− u(x0, y0)
h2=
∂u∂y
(x0, y0)f ′(z0) =
1i
∂u∂y
(x0, y0) +∂v∂y
(x0, y0) = −i∂u∂y
(x0, y0) +∂v∂y
(x0, y0)
=∂v∂y
(x0, y0)− i∂u∂y
(x0, y0)
12 /13

UNAJ - 2015 Guía 3C - Derivada Compleja
Como la existencia del límite establece una independencia del caminoelegido para calcularlo, tendremos que f ′(z0) es la misma, calculada deambas maneras, por lo cual
∂u∂x
(x0, y0) + i∂v∂x
(x0, y0) =∂v∂y
(x0, y0)− i∂u∂y
(x0, y0)
entonces, igualando parte real e imaginaria, tenemos
∂u∂x
(x0, y0) =∂v∂y
(x0, y0)
∂u∂y
(x0, y0) = − ∂v∂x
(x0, y0)
Estas son las ecuaciones de Cauchy-Riemann. Estas ecuaciones deben satisfacer-
se para que exista la derivada.
13 /13

Guía 3D - Integración en el plano ComplejoDiego Vallejo, Melina Podestá, Eva Almirón5 Mayo 2015 Con aportes del Material del Dr. Octa-
vio Miloni
Curvas Paramétricas en C
Parametrización de la circunferencia
Hemos visto en la Guía 3B que podemos describir una circunferen-cia C de radio uno centrada en el origen, mediante la ecuación z = eit
donde 0 6 t 6 2π.Aquí z es una función z(t) de una variable real t.
z = eit
x + iy = cos t + i sen t
Igualando parte real y parte imaginaria, obtenemos dos ecuacionesparamétricas reales de la curva C: También podemos utilizar notación
de intervalos para el parámetro t:t ∈ [0, 2π] equivale a 0 6 t 6 2π
C :
x = cos t
y = sen t0 6 t 6 2π
A la variable real t la llamaremos parámetro.A la ecuación z = eit donde 0 6 t 6 2π, la llamaremos ecuación
paramétrica compleja de C.Recordemos que el parámetro t representaba al tiempo en la situa-
ción de la guia 3B. A medida que el tiempo transcurre, el valor de tcrece .
Definimos el sentido de recorrido de la curva C al sentido dadopor los valores de t crecientes.
Para las ecuaciones paramétricas anteriores, el sentido de recorridoes antihorario. Para ver esto completen la siguiente tabla y grafiquenen el dibujo:
t fracciónvuelta
cos t sen t z(t)
0 0 1 0 1
1/2 π 1/4
π 1/2
3/2 π 3/4
Ejercitación �

UNAJ - 2015 Guía 3D - Integración en el plano Complejo
1. Grafique la curva que tiene las mismas ecuacionesque la curva C (x = cos t, y = sin t), pero:
a) t varía entre 0 y π/2
b) t varía entre π y43
π
2. Ahora cambiamos la variable t por −t
Recordando que cos(−t) = cos t y que sen(−t) = − sen t lasecuaciones describen una curva −C
−C :
x = cos t
y = − sen t− 2π 6 t 6 0
3. ¿Qué curva describe este par de ecuaciones paramétricas?
4. ¿Porqué piensan que la curva se llama ahora −C? qué relacióntiene esto con C y el sentido de recorrido?
5. Qué ocurrió con los límites del parámetro t?
6. Grafique una curva que tenga las mismas ecuaciones paramétricasque la curva −C pero donde...
a) ... t varía entre 0 y π/2
b) ... t varía entre −π y −π/2
c) ... t varía entre −34
π y −14
π
7. Escriba las ecuaciones paramétricas de un arco de circunferenciade radio 1, centrada en el origen, cuyo punto inicial sea z = −i, ysu punto final sea z = −1, recorrido en sentido horario.
Siguiendo los resultados de los ejercicios 2 y siguientes, para cam-biar el sentido de recorrido será suficiente hacer el cambio t→ −t, en lasecuaciones y en los límites del parámetro.
Esta misma circunferencia se puede describir sin el parámetro t,elevando al cuadrado y sumando las ecuaciones x = cos t, y = sen tobteniendo su ecuación cartesiana x2 + y2 = 1. Notemos que estaecuación cartesiana no posee información del sentido de recorrido de lacurva.
Volviendo a la situación de la guía 3B, trabajamos con el vectorvelocidad, que era la derivada z′(t) del vector posición z(t). Estomotiva la siguiente
2 /10

UNAJ - 2015 Guía 3D - Integración en el plano Complejo
↪→ Definición
Vector Tangente Dada una curva C definida paramétricamente porz(t) con a 6 t 6 b, definimos a z′(t) como vector tangente a la curvaC en el punto z(t), si existe la derivada z′(t).
Ejercitación �
1. ¿Hay alguna relación entre el vector tangente y el sentido de reco-rrido de la curva?
2. Hallar los vectores tangentes a la curva C en z = −i y a la curva−C también en z = −i.
3. ¿Qué pasa en general con el vector tangente si invertimos el senti-do de recorrido de la curva?
Ejemplo
Escribir las ecuaciones paramétricas de la Circunferencia D centradaen z = −i y de radio 2.
Primero resolvamos cómo parametrizar el caso más sencillo dela circunferencia D1 de radio 2 centrada en el origen. Mirando elgráfico vemos que D1 : {x = 2 cos t, y = 2 sen t, 0 6 t 6 2π}.
Elevando al cuadrado y sumando puede obtenerse su ecuacióncartesiana x2 + y2 = 4.
Ahora consideremos qué ocurre si el centro de la circunferencia sedesplaza desde el origen z = 0, al punto z = −i. La coordenada xno varía por este desplazamiento mientras que la coordenada y sedisminuye en una unidad. Del gráfico vemos que 1 + y = 2 sen t.Por lo tanto:
D :
x = 2 cos t
y = 2 sen t− 1t ∈ [0, 2π]
Ejercitación �
Halle las ecuaciones paramétricas de...
1. ... una circunferencia de radio 4, centrada en el origen ¿Ayudasaber que la ecuación cartesiana es x2 + y2 = 16?
2. ... una circunferencia de radio r centrada en el origen?
3 /10

UNAJ - 2015 Guía 3D - Integración en el plano Complejo
3. ... una circunferencia centrada en z0 = 2− i de radio 1? Grafiquen.Indiquen el sentido de recorrrido.
4. ... una circunferencia centrada en z0 = a+ ib de radio r? (a, b, r ∈ R
y r > 0).
5. ... una porción de la circunferencia anterior que cumple 3π/4 6t 6 5π/6. Realicen el gráfico. Marquen el sentido de recorrido.
Parametrización de una gráfica de una función
La gráfica de una función y = f (x) para a 6 x 6 b admite entreotras la parametrización trivial:
C :
x = t
y = f (t)a 6 t 6 b
También aquí el cambio de t → −t invierte el sentido de recorridode la curva.
Ejemplo
1. Parametrizar la gráfica de f (x) = 3 entre x = 1, y x = 4.
Simplemente a partir de los datos: Vamos a hablar en general de la curvade la gráfica de f (x) aún cuando seauna línea recta.
C :
x = t
y = 51 6 t 6 3.
2. Parametrizar la porción de parábola y = x2 − 1 que va desde(−2, 3) hasta (1, 0). Halle su vector tangente. Haga un gráficorepresentado la situación y mostrando z y z′ en z = −1.
C :
x = t
y = t2 − 1− 2 6 t 6 4.
Cálculo del Vector tangente: z(t) = t + i(t2 − 1). Derivando:z′(t) = 1 + i2t.
Debo hallar el valor de t donde evaluar z′(t), para ello resuelvo:z(t) = −1t + i(t2 − 1) = −1 + 0i,
Igualando parte real y parte imaginaria:
t = −1
t2 − 1 = 0Ambas ecuaciones se satisfacen si t = −1.Evalúo: z(−1) = −1, z′(−1) = 1− 2i.
4 /10

UNAJ - 2015 Guía 3D - Integración en el plano Complejo
En el gráfico pueden ver que conviene graficar al vector z′(t) apartir de la punta del vector z(t) y no a partir del origen. Recorde-mos que los vectores son libres, es decir pueden representarse encualquier lugar del plano.
3. Escriba las ecuaciones paramétricas para la misma porción de pa-rábola del ejemplo anterior, recorrida en sentido inverso (1, 1) →(−2, 4).
C :
x = −t
y = t2− 4 6 t 6 2.
Ejercitación �Recuerden que la ecuación de la rectaen el plano que pasa por el punto(a1, a2) y tiene pendiente m es
y− a2 = m(x− a1)
Además la pendiente m de una línearecta en el plano, que pasa por lospuntos (a1, a2) y (b1, b2) es
m =b2 − a2
b1 − a1
Para cada caso, halle las ecuaciones paramétricas, encuentren elvector tangente y grafiquen.
1. Porción de línea recta C1: y = 4 para x entre −2 y 3.
2. Segmento recto C2 que va desde z0 = −2− i hasta z1 = −2 + 3i
3. Segmento recto C3 que va desde z0 = −2 + i hasta z1 = 2− 4i
5 /10

UNAJ - 2015 Guía 3D - Integración en el plano Complejo
Integración en el plano Complejo
Recordemos la integral real
Definimos en Matemática I la Integral de una función real f (x)entre los números reales a y b:∫ b
af (x)dx
Esta integral se calcula a lo largo del intervalo cerrado [a, b] queconecta el punto x = a con el punto x = b.
Para realizar este cálculo elegimos puntos xi donde i = 0...n (x0
coincide con a y xn coincide con b) que dividen al segmento en nsubintervalos [xi, xi + 1] cada uno de longitud ∆ix = xi+1 − xi. Porcomodidad elegiremos equiespaciados los puntos de tal modo que
todos los subintervalos tienen igual longitud ∆x =b− a
n. En la figura
se representa cada subintervalo mediante una flecha que va desde supunto inicial xi hasta su punto final xi+1.
Luego elegimos puntos x∗i dentro de cada subintervalo, allí esdonde se evalúa la función f (x). Por comodidad los elegiremos en elpunto medio de cada subintervalo. Finalmente formamos una sumade Riemann, que escribiremos en este caso de intervalos equiespacia-dos:
RM =n
∑i=0
f (x∗i )∆x
Finalmente la integral se obtiene tomando el límite de la suma deRiemann RM, para el número n de subintervalos tendiendo a infinito,si el límite existe. En caso de que la función f (x) sea continua en elintervalo [a, b] está garantizada la existencia del límite, o sea, de laintegral.
Notemos que para un valor de n lo suficientemente grande lasuma de Riemann, RM es una buena aproximación a la Integral.
Y ahora en C ?
Construiremos una integral de una función compleja f (z), entredos números complejos za y zb.
Notemos que ahora estas cantidades están en un plano (el planoC) y no en una recta. La manera de conectar un número complejo conotro es una curva en el plano complejo. Allí formaremos una suma deRiemann análogamente a lo realizado en la recta real, sólo que lossubintervalos pueden tomar cualquier dirección.
↪→ Definición
Denominaremos Integral de una función compleja f (z) a lo largo
6 /10

UNAJ - 2015 Guía 3D - Integración en el plano Complejo
de la curva C, que va desde un punto inicial za a un punto final zb a:
∫C
f (z)dz =∫ tb
taf (z(t))z′(t)dt
Esta definición nos permite calcular la integral mediante la segun-da expresión de la igualdad.
Por haberse definido como la integral real la integral complejahereda sus propiedades:
¿Qué precisamos para realizar este cálculo?. Veamos en detalle enlos ejemplos.
Ejemplo
1. Calcule∫
C Re(z) dz donde C es el segmento de recta que va desdez0 = 0 a z1 = 1− i.
a) Parametrización y limites del parámetro t: para obtener la ecua-ción de la recta que pasa por los puntos z0 = 0 y z1 = 1 − i,
primero calculo la pendiente m =−1− 01− 0
= −1. La ecuación
queda:
y− (−1) = −1(x− 1)
y = −x
de esta obtengo la parametrización:
z(t) = t− ti 0 6 t 6 1
7 /10

UNAJ - 2015 Guía 3D - Integración en el plano Complejo
donde los límites de la variable t se obtienen pidiendo que z(ta) =
0 (de ahi deducimos que ta = 0) y que z(tb) = 1− i (de dondeviene que tb = 1).
b) Derivada de la parametrización (vector tangente) Derivando laúltima ecuación queda:
z′(t) = 1− i 0 6 t 6 1
c) Ahora formamos la integral:
∫C
f (z)dz =∫ tb
taf (z(t))z′(t)dt
=∫ 1
0Re(t− ti)(1− i)dt
=∫ 1
0t(1− i)dt
=∫ 1
0(t− ti)dt
Aplico la propiedad: la integral de una suma es la suma de las integra-les
=∫ 1
0tdt−
∫ 1
0tidt
Aplico la propiedad: una constante (real o compleja) multiplicativa,sale afuera de la integral
=∫ 1
0tdt− i
∫ 1
0tdt
Aplico Regla de Barrow
=t2
2
]1
0− i
t2
2
]1
0
=12
2− 02
2− i(
12
2− 02
2)
=12− i
12
⇒Teorema
8 /10

UNAJ - 2015 Guía 3D - Integración en el plano Complejo
Teorema Fundamental del Cálculo.
Si F(z) es un función analítica tal que su derivada f (z) = F′(z)es contínua en una región G que contiene a la curva suave C,entonces ∫
Cf (z) dz = F(z(ta))− F(z(tb))
Notemos que en las condiciones del Teorema Fundamental deCálculo, toda integral de una curva cerrada es nula, ya que el puntoinicial y final coinciden.
La integral sobre una curva cerrada será cero si la función a inte-grar es analítica sobre la curva y en la región encerrada por la curva.
Ejercitación �
1. Evalúa las siguientes integrales sobre las curvas dadas∫C Re(z) dz,
∫C Im(z) dz;
∫C z dz
a1) C: segmento de recta que une z = 0 con z = 1− i
a2) C : | z |= 1
a3) C : | z− a |= R
2. Evalúa∫
C ez dz en..
a) ... C :es la trayectoria en el primer cuadrante de la circunferencia| z |= 1 que une a z = 1 con z = i
b)... C : recta que une z = 1 con z = i
c) ... C : trayectoria a lo largo de los ejes corrdenados que unez = 1 con z = i
3. Evaluar∫
C Im(z) dz en cada una de las tres curvas dadas en elitem anterior
¿Puede afirmar que la integral es independiente del camino?
¿Contradice estos resultados el Teorema Fundamental?
4. Evaluar∫
C z1+i dz donde es la curva C : | z |= 1
5. Evaluar∫
C1z dz donde es la curva C : | z |= 1
6. Evaluar∫
C (2z− z) dz donde la curva C es el arco de parábolay = x2 desde z = 0 hasta z = −2 + 4i
9 /10

UNAJ - 2015 Guía 3D - Integración en el plano Complejo
7. Calcular ∮C
1|z− 1|2 dz
donde la curva C es la circunferencia de ecuación (x− 1)2 + y2 = 4
8. Calcular ∮C
1|z|
donde la curva C es la circunferencia de ecuación x2 + y2 = 4
9. Calcular ∮C
1|z + 1− i|
donde la curva C es la circunferencia de ecuación (x + 1)2 + (y−1)2 = 1
10 /10

Guía 5 - Serie de FourierDiego Vallejo, Melina Podestá, Eva Almirón5 junio 2015 Con aportes del Material
del Dr. Octavio Miloni
Serie de Fourier
FuncionesPeriódicas
Funcionespares eimpares
Prolongaciónperiódica
Ortogonalidadde sen(nx)y cos(nx)
Aplicaciones:Ecuaciones
DiferencialesParciales
Funciones Periódicas
“Se llama fenómenos periódicos a aquellos que se repiten sucesivamente,siempre de idéntica forma. El movimiento circular uniforme, las vibraciones deun diapasón, las señales luminosas de un faro, [...] son ejemplos de fenómenosperiódicos. [...] Los fenómenos periódicos son trascendentales no solo porqueexisten muchos en la naturaleza, sino también porque gracias a ellos podemostener noción del tiempo. Ello se debe a que la única forma de medir el tiempoconsiste en contar el número de veces que se repite un fenómeno periódico.Cuando contabilizamos el tiempo en días, contamos las vueltas del movimientode rotación de la Tierra; si lo hacemos en años, contamos las de su movimientode traslación alrededor del Sol. Por otra parte, los relojes no hacen otra cosaque contar las oscilaciones de un péndulo o de una pequeña ruedecilla o lasvibraciones de un cristal de cuarzo” –Fisica 2. Ed. Casals.

UNAJ - 2015 Guía 5 - Serie de Fourier
↪→ Definición
Una función se denomina periódica si
f (x + p) = f (x) donde p ∈ R
. El número p se denomina período.
Esto significa que la gráfica de una función periódica f (x) conperíodo p, puede trasladarse p unidades a lo largo del eje x, sin que lagráfica cambie:
0 5 10 15 20 25−2
−1
0
1
2
Función Periódica. Período p ≈ 6,4
Observación: La función sen(x) es periódica de período p = 2π,dado que (verificar con la circunferencia unitaria):
sen(x + 2π) = sen(x)
Ejercitación �
1. La función sen(x) verifica que sen(x + 4π) = sen(x) Esto ¿quieredecir que su período es 4π? ¿Cuál es su período entonces?
2. La función cos(x) ¿es periódica? ¿cuál es su período?
3. La función tan(x) =sen(x)cos(x)
, que es un cociente de dos funciones
periódicas de período 2π, ¿es periódica? ¿cuál es su período?
4. la función compleja de variable real t: f (t) = eit es periódica? ¿queperíodo tiene?
5. Determine si las funciones de las siguientes gráficas pueden ser ono periódicas, y en caso afirmativo, estime su período.
2 /16

UNAJ - 2015 Guía 5 - Serie de Fourier
0 2 4 6 8 10−2
−1
0
1
2f1(x)
0 2 4 6 810
20
30
40
f2(x)
0 2 4 6
−4
−2
0
2
4
f3(x)
0 2 4 6−1
0
1
2
f4(x)
Funciones trigonométricas de un múltiplo x
Las funciones de la clase sen(nx) y cos(nx) con n ∈N son periódi-cas, por ser básicamente senos y cosenos. Calculemos su período.
Ejemplo
Consigna: Obtenga el período de f (x) = cos(2x)
Solución: Sabemos que
cos(α) = cos(α + 2π) (Ecuación 1)
π2
π 3π2
2π 5π2
3π−2
−1
0
1
2
cos(x) y cos(2x)
La función cos 2x tiene período p = πigual a la mitad del período de cos x.
si la función f (x) es periódica con un período p (que aún no cono-cemos) verifica que:
f (x) = f (x + p)
o sea
cos(2x) = cos (2(x + p)]
cos (2x)︸︷︷︸ = cos (2x + 2p)︸ ︷︷ ︸ comparo con (Ecuación 1):
cos(α) = cos(α + 2π)
3 /16

UNAJ - 2015 Guía 5 - Serie de Fourier
Veo que α = 2x y que 2p = 2π o sea el período p = π.
Ejercitación �
Verifica el periodo para cada una de las siguientes funciones:
1. cos(2x) (Rta: p = π)
2. sen(x4) (Rta: p = 8π)
3. cos(2π
5x) (Rta: p = 5)
4. sen(2π
ax) (Rta: p = a)
Funciones pares e impares
↪→ Definición
Diremos que una función f (x) es una función par, si su gráfica essimétrica respecto del eje y (es decir si colocando un espejo sobre eleje y su gráfica se refleja sobre sí misma).
Una función f (x) será una función impar si su gráfica no varía alrotarla un ángulo θ = π radianes (es decir media vuelta) alrededordel origen de coordenadas.
Ejemplo
1. La función f (x) = cos(x) tiene la siguiente gráfica: − π2 − π
4π4
π2
−1
1
La función f (x) = cos x es par.
Vemos que es simétrica respecto del eje y, o sea, es una funciónpar. Notemos que cos(π
4 ) = cos(−π4 ), y para cualquier x:
cos(x) = cos(−x)
.
2. La función f (x) = x3 tiene la siguiente gráfica:
Vemos que no cambia al rotarla π radianes respecto del origen osea, es una función impar. −1 1
−2
−1
1
2
La función f (x) = x3 es impar.
Notemos que 13 = −(−1)3 y en general, para cualquier x:
x3 = −(−x)3
Ejercitación �
4 /16

UNAJ - 2015 Guía 5 - Serie de Fourier
1. ¿Habrá alguna función que sea a la vez par e impar? ¿Puede darun ejemplo? ¿Habrá más de una? Grafique.
2. Teniendo en cuenta el ejemplo anterior, decida para cada caso sila función es i) par, ii) impar, o iii) ni par ni impar. Si puede utiliceherramientas gráficas.
a) f1(x) que verifica f1(x) = f1(−x)
b) g1(x) tal que g1(x) = −g1(−x)
c) f2(x) = 3 d) f3(x) = sen(x) e) f4(x) = x2
f) f5(x) = xn con n ∈N y n impar.
g) f6(x) = xn con n ∈N y n par.
3. Decida para cada caso si la función es i) par, ii) impar, o iii) ni parni impar. ¿Podría ayudarse para resolver mediante alguna gráfica? Concepto previo: Signo de la Integral
definida. Área bajo la curva.
a) El producto [ f .g](x) = x3 cos x, donde f (x) = x3 es impar yg(x) = cos(x) es par.
b) El producto de una función par por una impar.
c) El producto de dos funciones pares.
d) El producto de dos funciones impares.
4. Mirando la gráfica de...
1
−1
1
−1
Gráfica de f (x) = x3
Area roja: AR = −∫ 0−1 f (x)dx.
Area Azul: AA =∫ 1
0 f (x)dx.
AA = AR
¿Puede visualizar la igualdad anteriormediante una rotación?
a) ... f (x) = x3 ¿qué puede decir de∫ 1−1 f (x)dx ?
Y para cualquier función f (x) impar ¿qué puede decir de∫ a−a f (x)dx ? (a es un número real positivo).
b) ... g(x) = x2 ¿qué relación hay entre∫ 0−1 g(x)dx y
∫ 10 g(x)dx ?
¿Qué relación hay entre∫ 0−1 g(x)dx y
∫ 1−1 g(x)dx ?
Y para cualquier función g(x) par ¿Qué puede decir de∫ a−a g(x)dx
? (a > 0 a ∈ R).
Conclusión: propiedades de las funciones pares e impares.
1. Cualquier función par fP(x) verifica que:
a) fP(x) = fP(−x) b)∫ a−a fP(x)dx = 2
∫ a0 fP(x)dx.
2. Una función f I(x) impar verifica que:
a) f I(x) = − f I(−x) b)∫ a−a f I(x)dx = 0.
3. El producto de dos funciones pares es par.
4. El producto de dos funciones impares es par.
5. El producto de una función par por una impar es impar.
5 /16
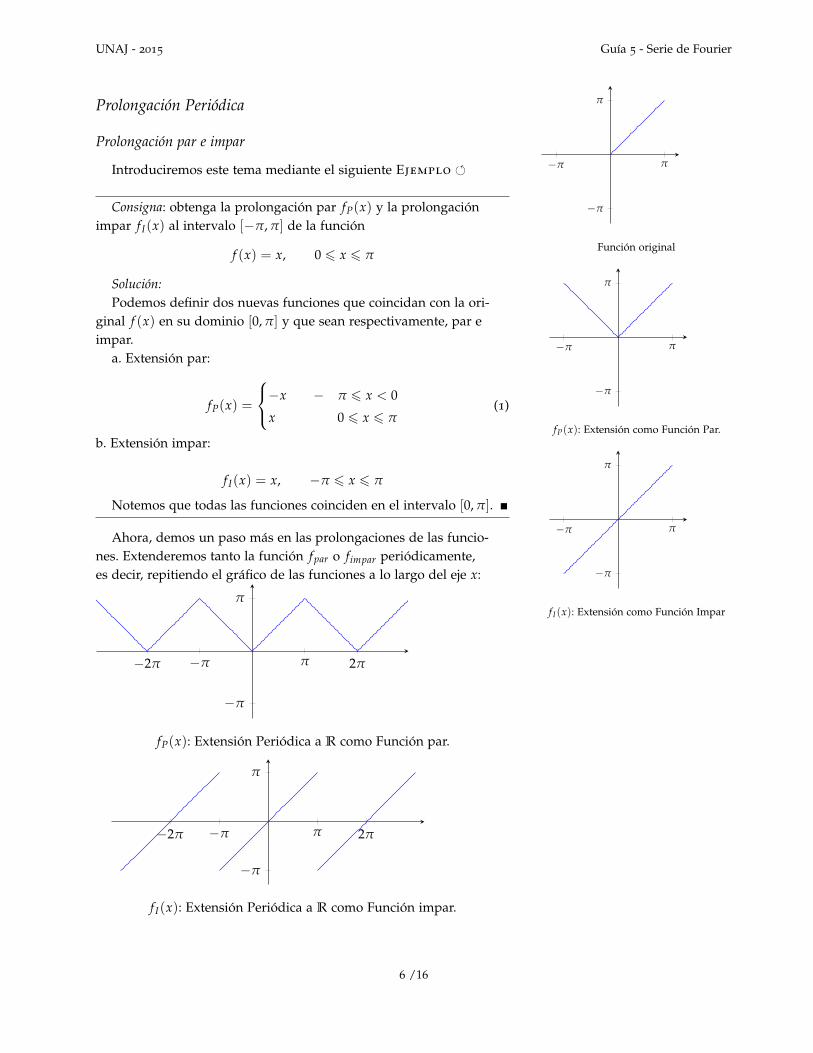
UNAJ - 2015 Guía 5 - Serie de Fourier
Prolongación Periódica
Prolongación par e impar
Introduciremos este tema mediante el siguiente Ejemplo
Consigna: obtenga la prolongación par fP(x) y la prolongaciónimpar f I(x) al intervalo [−π, π] de la función
f (x) = x, 0 6 x 6 π
−π π
−π
π
Función original
−π π
−π
π
fP(x): Extensión como Función Par.
−π π
−π
π
f I(x): Extensión como Función Impar
Solución:Podemos definir dos nuevas funciones que coincidan con la ori-
ginal f (x) en su dominio [0, π] y que sean respectivamente, par eimpar.
a. Extensión par:
fP(x) =
−x − π 6 x < 0
x 0 6 x 6 π(1)
b. Extensión impar:
f I(x) = x, −π 6 x 6 π
Notemos que todas las funciones coinciden en el intervalo [0, π].
Ahora, demos un paso más en las prolongaciones de las funcio-nes. Extenderemos tanto la función fpar o fimpar periódicamente,es decir, repitiendo el gráfico de las funciones a lo largo del eje x:
−2π −π π 2π
−π
π
fP(x): Extensión Periódica a R como Función par.
−2π −π π 2π
−π
π
f I(x): Extensión Periódica a R como Función impar.
6 /16

UNAJ - 2015 Guía 5 - Serie de Fourier
Ejercitación �
Determina las prolongaciones par e impar al intervalo [−1, 1] delas siguientes funciones
1. f (x) = x2, 0 6 x 6 1
2. f (x) = 1, 0 6 x 6 1
3. f (x) = −x + 1, 0 6 x 6 1
Para cada una grafica sus prolongaciones periódicas a todo R. ¿Cuálserá el período de cada función?
Serie de FourierConcepto Previo: Una Serie ∑∞
k=0 ak sedefine de modo similar a la integralimpropia:
∞
∑k=0
ak = lı́mn→∞
n
∑k=0
ak
Concepto Previo: Análogamente a la In-tegral impropia una Serie ∑∞
k=0 ak no de-pende de la variable k de la sumatoria.Dicho de otro modo: ∑∞
k=0 ak = ∑∞u=0 au
↪→ Definición
Sea f (x) una función contínua a trozos en el intervalo [−π, π].Supongamos que extendemos periódicamente a la función a toda larecta R, con periodo p = 2π.
La Serie de Fourier de la función f (x) se define como:
f (x) =a0
2+
∞
∑k=0
[ak cos (kx) + bk sen (kx)]
Cálculo de los coeficientes:Aplicaremos las propiedades de ortogonalidad (ver Anexo en la
página 15 para la deducción de las integrales siguientes)donde los coeficientes a0, ak y bk se obtienen a partir de
a0 =1π
∫ π
−πf (x)dx
ak =1π
∫ π
−πf (x) cos (kx) dx
bk =1π
∫ π
−πf (x) sen (kx) dx
Ejemplo
Consigna: Obtenga la Serie de Fourier de:
f (x) =
−1 − π 6 x < 0
1 0 6 x 6 π
Solución:
7 /16

UNAJ - 2015 Guía 5 - Serie de Fourier
Obtener la serie de Fourier consiste básicamente en obtener loscoeficientes. Aplicaremos propiedades del recuadro de página 5. Paraello notemos que f (x) es impar. I. Cálculo por integración de a0
a0 =1π
∫ π
−πf (x)dx
=1π
∫ 0
−π(−1) dx +
1π
∫ π
01 dx
= − 1π[0− (−π)] +
1π[π − 0]
= −1 + 1 = 0
I. Cálculo de a0:Por propiedades de funciones impares
a0 =1π
∫ π
−πf (x)dx = 0
II. Cálculo de los ak: II. Cálculo por integración de ak
ak =1π
∫ π
−πf (x) cos (kx) dx
=1π
∫ π
−πf (x) cos(kx)dx
=1π
∫ 0
−π(−1) cos(kx)dx +
1π
∫ π
01 cos(kx)dx
=−1π
[sen(k 0)
k− sen(k (−π))
k
]+
1π
[sen(k π)
k− sen(k 0)
k
]= 0
Notemos que f (x) cos (kx) es impar por ser producto de funciónimpar por una función par. Por lo tanto
ak =1π
∫ π
−πf (x) cos (kx) dx = 0
III. Cálculo de los bk:f (x) sen (kx) es par por ser producto de dos funciones impares.
Tabla de Valores de cos(kπ).
k cos(kπ)
1 -1
2 1
3 -1
4 1
... ...
bk =1π
∫ π
−πf (x) sen (kx) dx
Ya que el integrando es par:
=1π
[2∫ π
01 sen(kx)dx
]=
1π
[− cos(k π)
k− − cos(k 0)
k
]=
1kπ
[− cos(k π) + 1]
Cuando k es par cos(k π) = 1 (ver tabla) con lo cual tenemos
bk par = 0
.Cuando k es impar cos(k π) = −1, con lo que resulta
bk impar =4
kπ
Así, la serie de Fourier de f (x) es:
f (x) =4π
[sen(x) +
sen(3x)3
+sen(5x)
5+
sen(7x)7
+ · · ·]
π
1
−1
−π
Sucesivas aproximaciones de Fourier dela onda cuadrada:
Rojo: 4π [sen(x)]
Azul: 4π
[sen(x) + sen(3x)
3
]Verde: 4
π
[sen(x) + sen(3x)
3 + sen(5x)5
]Ejercitación �
Para las siguientes funciones, encontrar el desarrollo de Fourier
8 /16

UNAJ - 2015 Guía 5 - Serie de Fourier
1. f (x) = x, −π 6 x 6 π
2. f (x) =
1 − π 6 x < 0
1/2 0 6 x 6 π
3. f (x) = x2, −π 6 x 6 π
Cuando el intervalo es [−L, L]
Si la función está definida en otro intervalo diferente de [−π, π],mediante el cambio de variables x → πx/L, se puede reducir al casoanterior.
La Serie queda ahora:
f (x) =a0
2+
∞
∑k=0
[ak cos
(πxL
)+ bk sen
(πxL
)]donde los coeficientes se obtienen mediante fórmulas similares a lasanteriores:
a0 =1L
∫ L
−Lf (x)dx
ak =1L
∫ L
−Lf (x) cos
(πxL
)dx
bk =1L
∫ L
−Lf (x) sen
(πxL
)dx
Aplicación: Ecuaciones Diferenciales Parciales
Recordemos del primer módulo que una ecuación diferencial enderivadas parciales (EDP) es una ecuación en la cual una función devarias variables (incógnita) es relacionada con sus derivadas parcia-les. Un ejemplo de EDP es la siguiente:
∂ f∂x
+∂ f∂y− f (x, y) = 0
En este caso, debido a que el orden de derivación es uno (involucraprimeras derivadas parciales) se dice que la ecuación es de primerorden. Los casos que vamos a estudiar y resolver como aplicación delas series de Fourier son las EDP de segundo orden:
1. Ecuación del Calor en una barra unidimensional
Consideremos una barra conductora de calor unidimencional delongitud L (la que por simplicidad y sin pérdidad de generalidad
9 /16

UNAJ - 2015 Guía 5 - Serie de Fourier
la ubicamos sobre el eje x). A lo largo de la barra, la temperaturavaría -en cada punto de la barra y en cada instante de tiempo-según una función u(x, t) y ésta función u satisface la ecuacióndiferencial:
∂u∂t
= κ∂2u∂x2
donde κ es un coeficiente constante que mide la conductividadtérmica.
Los problemas a resolver incluyen dos tipos de restricciones:
* las condiciones iniciales
* y las condiciones de contorno o de frontera.
2. Ecuación de una cuerda vibrante
Consideremos una cuerda (como la de una guitarra) de longitudL sujeta en sus extremos. Consideremos que en un instante inicial,estiramos la cuerda (describiendo determinada curva en el plano(x, y)). Al soltar la cuerda, ésta va describiendo en cada instante yen cada lugar una función que satisface la ecuación de onda:
∂2u∂t2 = c2 ∂2u
∂x2
3. Ecuación del potencial
La ecuación denominada del potencial es la ecuación diferencialparcial que es satisfecha por el potencial gravitatorio o eléctrico,que en su versión bidimensional posee la ecuación
∂2u∂x2 +
∂2u∂y2 = 0
Estos ejemplos de ecuaciones diferenciales parciales serán losque en esta práctica vamos a resolver en el caso de que puedaresolverse mediante el método de separación de variables
10 /16

UNAJ - 2015 Guía 5 - Serie de Fourier
Principio de Superposición
Un resultado importante para la resolución de EDP es el denomi-nado principio de superposición de soluciones. Este principio -que no esotra cosa de la aplicación de la linealidad de este tipo de ecuacionesdiferenciales- establece que
Sea u1, u2, · · · , un, · · · soluciones de las ecuaciones diferenciales (delcalor, de la cuerda vibrante o del potencial). Entonces, la sumatoria
u = ∑n=1
un
también es solución.
Método de separación de variables
Para las ecuaciones diferenciales a estudiar, el método que vamosa utilizar es el denominado de separación de variables. No tiene quever con el método estudiado en el primer módulo. Básicamente,este método consiste en considerar la función incógnita como unproducto de funciones cada una de una variable.
Por ejemplo, tanto en la ecuación del calor como en la ecuación deonda, suponemos que la función u puede escribirse como
u(x, t) = X (x) · T (t)
Para el caso de la ecuación del potencial, la separación de variablesvendrá dada por
u(x, y) = X (x) · Y(y)
Esta separación permite calcular las derivadas parciales de manerasencilla, ya que, para el primer caso tendremos
∂u∂x
= X ′(x)T (t)
∂u∂t
= X (x)T ′(t)
∂2u∂x2 = X ′′(x)T (t)
∂2u∂t2 = X (x)T ′′(t)
y para el segundo∂u∂x
= X ′(x)Y(y)
∂u∂y
= X (x)Y ′(y)
11 /16

UNAJ - 2015 Guía 5 - Serie de Fourier
∂2u∂x2 = X ′′(x)Y(y)
∂2u∂y2 = X (x)Y ′′(y)
Resolución de EDP
Ejemplo
Ecuación del calor en una barra
Consideremos una barra de longitud L = π sobre el eje x. Losextremos de la barra se mantienen a temperatura T = 0.
Llamaremos u(x, t) a la temperatura de la barra en la posición x yel tiempo t.
Consideremos que en el instante inicial, la temperatura de la barraestaba determinada por la función f (x) = u(x, 0), es decir, que a lolargo de la barra la temperatura no es constante, sino que en cadapunto x tiene un valor dado por la función f (x). Supongamos que elcoeficiente de conductividad térmica es κ = 1.
Se puede deducir la siguiente ecuación (basada en la ley de Fou-rier de transmisión del calor y la ley de conservación de la energía):
∂u∂t
=∂2u∂x2
con las condiciones
u(0, t) = u(L, t) = 0 Condiciones de Frontera
u(x, 0) = f (x) Condiciones Iniciales
Aplicando el método de separación de variables, supongamosque la función u = X · T , con lo cual reemplazando las derivadastenemos
X · T ′ = X ′′ · TT ′T =
X ′′X
Como X es sólo una función de x y T es sólo una función de t, laúltima ecuación establece que el cociente debe ser un número real.con lo cual
T ′T =
X ′′X = −λ
Entonces, esto nos define dos ecuaciones diferenciales ordinarias:
T ′T = −λ
12 /16

UNAJ - 2015 Guía 5 - Serie de Fourier
cuya solución es T (t) = ce−λt y la ecuación
X ′′X = −λ
cuya solución general es
X (x) = A sin(√
λx) + B cos(√
λx)
Entonces, en términos generales, la solución u = X · T será:
u(x, t) = e−λt[A sin(√
λx) + B cos(√
λx)]
Para ir determinando los coeficientes, planteemos las condiciones
u(0, t) = e−λt[A sin(√
λ0) + B cos(√
λ0)] = e−λtB = 0
con lo que tenemos que B = 0
u(π, t) = e−λt A sin(√
λπ) = 0
donde, la única posibilidad es que√
λ = n, con n entero. A partir deestas condiciones, obtenemos que
un(x, t) = Ane−n2t sin(nx)
Entonces, aplicando el principio de superposición, tendremos que lasolución general para este problema será
u(x, t) =∞
∑n=1
un(x, t) =∞
∑n=1
Ane−n2t sin(nx)
Sólo nos faltaría determinar los coeficientes An. Para ello, apliquemosla condición inicial, que establece que u(x, 0) = f (x), con lo cual
u(x, 0) =∞
∑n=1
un(x, 0) =∞
∑n=1
An sin(nx) = f (x)
Entonces los coeficientes An son los coeficientes de Fourier de la seriede senos de la función f (x) considerada como impar entre [−π, π] esdecir,
An =2π
∫ π
0f (x) sin(nx)dx
Con la función f (x) podemos obtener los coeficientes An y, en conse-cuencia, la solución del problema
Ejercitación �
1. Para la ecuación de la cuerda vibrante, plantea completamente elmétodo de separación de variables
13 /16

UNAJ - 2015 Guía 5 - Serie de Fourier
2. Para la ecuación del potencial, plantea completamente el métodode separación de variables.
3. Encuentra las soluciones para las siguientes ecuaciones correspon-dientes a la conducción térmica
a)∂u∂t
= 4∂2u∂x2
con las condiciones u(0, t) = u(π, t) = 0, u(x, 0) = sin(2x) +sin(3x). La longitud de la barra es L = π
b)∂u∂t
= 4∂2u∂x2
con las condiciones: u(0, t) = u(π, t) = 0
u(x, 0) =
0 0 < x < π/2
0 π/2 < x < 1.
La longitud de la barra es L = π
4. Encuentra las soluciones para las siguientes ecuaciones correspon-dientes a la ecuación de onda.
a)∂2u∂t2 =
∂2u∂x2
con las condiciones:
u(0, t) = u(π, t) = 0,
u(x, 0) = 0,01 sin(3x), ∂u∂t (x, 0) = 0.
La longitud de la cuerda es L = π
b)∂2u∂t2 = 25
∂2u∂x2
con las condiciones:
u(0, t) = u(π, t) = 0,
u(x, 0) = 14 sin(x), ∂u
∂t (x, 0) = 10 sin(2x).
La longitud de la cuerda es L = π
14 /16
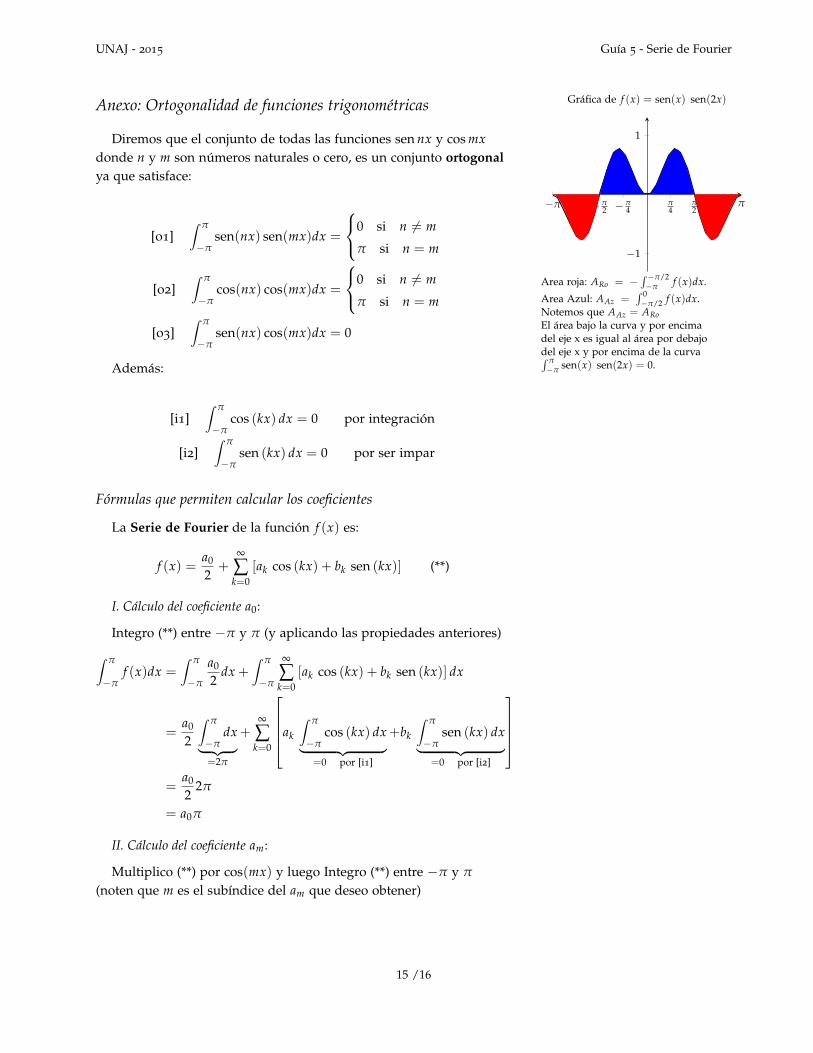
UNAJ - 2015 Guía 5 - Serie de Fourier
Anexo: Ortogonalidad de funciones trigonométricas
Diremos que el conjunto de todas las funciones sen nx y cos mxdonde n y m son números naturales o cero, es un conjunto ortogonalya que satisface:
−π − π2 −
π4
π4
π2
π
−1
1
Gráfica de f (x) = sen(x) sen(2x)
Area roja: ARo = −∫ −π/2−π f (x)dx.
Area Azul: AAz =∫ 0−π/2 f (x)dx.
Notemos que AAz = ARoEl área bajo la curva y por encimadel eje x es igual al área por debajodel eje x y por encima de la curva∫ π−π sen(x) sen(2x) = 0.
[o1]∫ π
−πsen(nx) sen(mx)dx =
0 si n 6= m
π si n = m
[o2]∫ π
−πcos(nx) cos(mx)dx =
0 si n 6= m
π si n = m
[o3]∫ π
−πsen(nx) cos(mx)dx = 0
Además:
[i1]∫ π
−πcos (kx) dx = 0 por integración
[i2]∫ π
−πsen (kx) dx = 0 por ser impar
Fórmulas que permiten calcular los coeficientes
La Serie de Fourier de la función f (x) es:
f (x) =a0
2+
∞
∑k=0
[ak cos (kx) + bk sen (kx)] (**)
I. Cálculo del coeficiente a0:
Integro (**) entre −π y π (y aplicando las propiedades anteriores)∫ π
−πf (x)dx =
∫ π
−π
a0
2dx +
∫ π
−π
∞
∑k=0
[ak cos (kx) + bk sen (kx)] dx
=a0
2
∫ π
−πdx︸ ︷︷ ︸
=2π
+∞
∑k=0
ak
∫ π
−πcos (kx) dx︸ ︷︷ ︸
=0 por [i1]
+bk
∫ π
−πsen (kx) dx︸ ︷︷ ︸
=0 por [i2]
=
a0
22π
= a0π
II. Cálculo del coeficiente am:
Multiplico (**) por cos(mx) y luego Integro (**) entre −π y π
(noten que m es el subíndice del am que deseo obtener)
15 /16

UNAJ - 2015 Guía 5 - Serie de Fourier
∫ π
−πf (x) cos(mx)dx =
∫ π
−π
a0
2cos(mx)dx +
∫ π
−π
∞
∑k=0
[ak cos (kx) cos(mx) + bk sen (kx) cos(mx)] dx
=a0
2
∫ π
−πcos(mx)dx︸ ︷︷ ︸
=0 por [i1]
+∞
∑k=0
ak
∫ π
−πcos (kx) cos(mx)dx︸ ︷︷ ︸
Analizo más...
+bk
∫ π
−πsen (kx) cos(mx)dx︸ ︷︷ ︸
=0 por [o3]
=
∞
∑k=0
ak
∫ π
−πcos (kx) cos(mx)dx
Aplico [o2]: si k 6= m la integral es nula. Si k = m, vale π
= a00 + a10 + a20 + · · ·+ am−10 + amπ + am+10 + · · ·∫ π
−πf (x) cos(mx)dx = amπ
de aqui despejo am.
III. Cálculo del coeficiente bm:
Ejercitación �
Tomando como ejemplo el cálculo de am, desarrolle el procedi-miento para despejar bm de la serie de Fourier.
Así los coeficientes a0, ak y bk se obtienen a partir de
a0 =1π
∫ π
−πf (x)dx
ak =1π
∫ π
−πf (x) cos (kx) dx
bk =1π
∫ π
−πf (x) sen (kx) dx
16 /16