Historia de La Cinematica
94
TRABAJO I HISTORIA DE LA CINEMATICA
-
Upload
benjamin-cupul-pina -
Category
Documents
-
view
42 -
download
2
Transcript of Historia de La Cinematica

TRABA JO I
HISTORIA DE LA CINEMATICA

INTRODUCCION
• En esta investigación encontraremos como la historia de la cinemática, quienes fueron los que la estudiaron y como fue influyendo en los avances tecnológicos, también hablaremos de que la cinemática una parte que se estudia de la física cual es el origen de la palabra y ver como se representa la interpretación analítica de dicho campo de estudio.

•Otra parte que manejaremos es la relación de mecanismo y maquina ya que no es lo mismo en la actualidad siempre hemos relacionados la maquina y la mecanismo o en ocasiones pensamos que es lo mismo sin embargo buscaremos la diferencia de dichos termino y veremos que en realidad son muy parecidos y que no puede existir uno sin el otro.

¿QUE ESLA CINEMATICA?

¿QUE ES LA CINEMATICA?
• La cinemática (del griego κινεω, kineo, movimiento) es la rama de la mecánica clásica que estudia las leyes del movimiento de los cuerpos sin tener en cuenta las causas que lo producen, limitándose, esencialmente, al estudio de la trayectoria en función del tiempo. La cinemática es una rama de la física dedicada al estudio del movimiento de los cuerpos en el espacio, sin atender a las causas que lo producen (lo que llamamos fuerzas). Por tanto la cinemática sólo estudia el movimiento en sí, a diferencia de la dinámica que estudia las interacciones que lo producen.

EN CINEMÁTICA DISTINGUIMOS LAS SIGUIENTES PARTES:
La magnitud vectorial de la Cinemática fundamental es el "desplazamiento" Δs, que lo realiza un cuerpo durante un lapso Δt. Como el desplazamiento es un vector, por consiguiente, sigue la ley del paralelogramo, o la ley de suma vectorial. Así si un cuerpo realiza un desplazamiento "consecutivo" o "al mismo tiempo" dos desplazamientos 'a' y 'b', nos da un deslazamiento igual a la suma vectorial de 'a'+'b' como un solo desplazamiento.
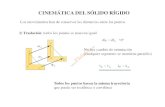
Cinemática de la partícula Cinemática del sólido rígido

HISTORIA
• Los primeros conceptos sobre cinemática se remontan al siglo XIV, particularmente aquellos que forman parte de la doctrina de la intensidad de las formas o teoría de los cálculos (calculationes). Estos desarrollos se deben a científicos como William Heytesbury y Richard Swineshead, en Inglaterra, y a otros, como Nicolás Oresme, de la escuela francesa.

HISTORIA
• Uno de los grandes ingenieros de la edad antigua fue Arquímedes, es reconocido por haber diseñado innovadoras máquinas, incluyendo armas de asedio y el tornillo de Arquímedes(287-212 a.C.) , que lleva su nombre.

HISTORIA
• Hacia el 1604, Galileo Galilei hizo sus famosos estudios del movimiento de caída libre y de esferas en planos inclinados a fin de comprender aspectos del movimiento relevantes en su tiempo, como el movimiento de los planetas y de las balas de cañón.[1] Posteriormente, el estudio de la cicloide realizado por Evangelista Torricelli (1608-47), va configurando lo que se conocería como Geometría del Movimiento.

HISTORIA
• El nacimiento de la cinemática moderna tiene lugar con la alocución de Pierre Varignon el 20 de enero de 1700 ante la academia real de las ciencias de París. En esta ocasión define la noción de aceleración y muestra cómo es posible deducirla de la velocidad instantánea con la ayuda de un simple procedimiento de cálculo diferencial.

HISTORIA
• En la segunda mitad del siglo XVIII se produjeron más contribuciones por Jean Le Rond d'Alembert, Leonhard Euler y André-Marie Ampère, continuando con el enunciado de la ley fundamental del centro instantáneo de rotación en el movimiento plano de Daniel Bernoulli (1700-1782).

HISTORIA• El vocablo Cinemática fue creado por André-Marie Ampère
(1775-1836), quién delimitó el contenido de la Cinemática y aclaró su posición dentro del campo de la Mecánica. Desde entonces y hasta nuestros días la Cinemática ha continuado su desarrollo hasta adquirir una estructura propia.

HISTORIA
• George Stephenson (1781-1848), junto con su hijo Robert (1803-1859) transformaron la idea de Trevithick de una locomotora de vapor sobre placas de hierro en L en el sistema de ferrocarril que cambiaría el mundo.

HISTORIA
• En 1883 Daimler y Maybach construyeron un motor con una carburador simple para vaporizar la gasolina y con encendido incandescente. Dos años después fabricaron la primera motocicleta del mundo y, al año siguiente, 1886, el primer automóvil

HISTORIA
•Karl Benz fue otra de las personas que se dedicaron a desarrollar y manufacturar el nuevo motor. Benz utilizaba el encendido eléctrico, que se universalizó pronto en los motores de automóviles de combustible líquido.

HISTORIA

HISTORIA
• Con la Teoría de la relatividad especial de Albert Einstein en 1905 se inició una nueva etapa, la cinemática relativista, donde el tiempo y el espacio no son absolutos, y sí lo es la velocidad de la luz.

MECANISMO
• Se le llama a un conjunto de sólidos resistentes móviles un respecto a otros unidos entre sí mediante diferentes tipos de uniones llamadas pares cinemáticos como lo son pernos uniones de contacto pasadores cuyo dispositivo es la transmisión de movimientos y fuerza. La mayoría de las veces un mecanismo puede ser analizado utilizando un enfoque bidimensional, lo que reduce el mecanismo a un plano.

EJEMPLO DE MECANISMO

MECANSIMO
• Una definición más breve seria: mecanismo es un dispositivo que transforma un tipo de movimiento ya sea rotacional o lineal en otro tipo de movimiento según sea el diseño.• Algunos tipos de mecanismo son: engranajes,
pistón biela, levas, mecanismos de poleas y correa, mecanismos de barras articuladas, mecanismos de biela y manivela, y mecanismo de tornillo/tuerca. Los mecanismos más sencillos pueden ser reducidos a un plano y analizados desde un enfoque bidimensional

CIGÜEÑAL-BIELA-PISTON

PISTON

COMPONENTES DE LOS MECANISMOS
• Tiene como componentes
• El eslabón. Elemento generalmente rígido que sirve para la transmisión de movimiento.
• Nodo. Elemento de un eslabón utilizado para la unir a otro eslabón.
• Junta o Par Cinemático. Es el elemento o indicativo de la unión de 2 o más eslabones.

ESLABONES

PAR CINEMATICO

EJEMPLOS DE MECANISMOS

TRABA JO I I
PARES CINEMATICOS

DEFINICION DE PARES CINEMATICOS
• Se le llama para al conjunto formado por dos o mas miembros de un mecanismo en contacto, con movimiento relativo entre ellos. • Así forman un par, en el mecanismo de un motor
alternativo, la biela y el pistón o la biela y el cigüeñal
• Pistón-Biela-cigüeñal

CIERRE DE PARES
• El movimiento entre los dos miembros del par queda asegurado y viene limitado por los denominados cierres de pares, de los cuales existen tres tipos:
• CIERRE DE FORMA
• CIERRE DE FUERZA
• CIERRE DE CADENA

CIERRE DE FORMA
• CIERRE DE FORMA: El contacto queda asegurado por la forma de los dos miembros en contacto en la figura se ha representado el cierre de un cilindro y el émbolo.

CIERRE DE FUERZA
• CIERRE DE FUERZA: El contacto queda asegurado por un miembro elástico interpuesto. En la figura se ha representado el cierre entre una leva y el elevador de válvula de un motor.

CIERRE DE CADENA
• CIERRE DE CADENA: El contacto queda asegurado por medio de otro miembro del mismo mecanismo. En la figura la unión entre las ruedas de engranajes 2 y 3 queda asegurado por la pieza de soporte 1(bastidor)

CLASIFICACIÓN DE LOS PARES
• Los pares pueden clasificarse :
1. Ateniendo a la superficie de contacto entre los miembros que constituyen el par:
- Pares superiores o de contacto lineal o puntual. (leva-varilla)(Fig. a).
- Pares inferiores o de contacto superficial. (cilindro-embolo)(Fig. b).

CLASIFICACIÓN DE LOS PARES
• 2. Atendiendo al movimiento relativo entre sus puntos:
2.1.De primer grado o lineal, cuando cualquier punto de uno de los miembros describe una línea en su movimiento relativo respecto del otro miembro del par:
- Par prismático: Un punto P describe una línea recta. (par P). (Fig. a)

CLASIFICACIÓN DE LOS PARES
- Par rotacion: El punto P describe una circunferencia (Par R). (Fig. b).
- Par helicoidal: El punto P describe una helice (Par H). ( Fig. c).

CLASIFICACIÓN DE LOS PARES
• 2.2. De segundo grado superficial, cuando cualquier punto de uno de los miembros describe una superficie en su movimiento.
- Par plano: el punto P describe un plano. (a)- Par cilíndrico: el punto P describe un cilindro. (b)- Par esférico: el punto P describe una esfera. (c)

CLASIFICACIÓN DE LOS PARES
• 2.3. De tercer grado o espacial, cuando un punto de uno de los miembros describe una curva alabada. Por ejemplo, unas esfera moviéndose dentro de un tubo de igual diámetro.

CLASIFICACIÓN DE LOS PARES
• 3. Atendiendo al tipo de rozamiento entre los dos miembros, se clasifican en:- Par con deslizamiento: Uno de los miembros
desliza sobre el otro, en su movimiento relativo (cilindro-Pistón).- Par con rodadura: Uno de los miembros rueda
sobre el otro, en su movimiento relativo (rueda-carril).- Par con pivoteo: Uno de los miembros pivota
sobre el otro, en su movimiento relativo.(quicio-quicionera).

CLASIFICACIÓN DE LOS PARES
• 4. Atendiendo al numero de grados de libertad que posee el movimiento relativo de los miembros que forman el par se clasifican en pares de I,II,III,IV y V grados de libertad.

CLASIFICACIÓN DE LOS PARES
• 5.Atendiendo al numero de barras que conectan, los pares también se pueden clasificar en binarios. En general, par p-ario será el que conecta p miembros.

ESQUEMAS, NOMBRES Y SÍMBOLOS DE PARES CINEMÁTICOS

MECANISMOS EQUIVALENTES
N=7 P1=8 F= 3(6)-2(8) F=2

MECANISMOS EQUIVALENTES
N=7 P1=8 F= 3(6)-2(8) F=2

MECANISMOS EQUIVALENTES
N=8 P1=9 F= 3(7)-2(9) F=3

MECANISMOS EQUIVALENTES
N=6 P1=7 F= 3(5)-2(7) F=1

MECANISMOS EQUIVALENTES
N=6 P1=7 F= 3(5)-2(7) F=1

MECANISMOS EQUIVALENTES
N=8 P1=10 F= 3(7)-2(10) F=1

TRABA JO I I I
CRITERIO DE GRUEBLER Y LA REGLA DE GRASHOF

ECUACIÓN DE GRUEBLER
• Los grados de libertad para eslabonamientos planos conectados con uniones se calculan con la ecuación de Gruebler.
M= Grados de libertad = 3(n – 1) – 2j – kn = Numero total de eslabones en el mecanismo.j = Numero total de uniones principales (uniones de pernos o de correderas.k = Número total de uniones de orden superior ( uniones de levas o engranes).

ECUACIÓN DE GRUEBLER
• Los eslabonamientos con grado de libertad iguales a cero o negativos se conocen como mecanismos bloqueados, los cuales son incapaces de moverse y formar una estructura. Una armadura es una estructura formada por eslabones simples, conectados por uniones de perno, con cero grados de libertad.
• Los eslabonamientos con múltiples grados de libertad necesitan más de un impulsor para operar con precisión. Los eslabonamientos con múltiples grados de libertad ofrecen mayor capacidad para posiciona con precisión un eslabón.

EJEMPLO I
• 1.- Una trituradora de latas que se utiliza para reducir su tamaño y facilitar su almacenamiento antes de reciclarse. Elabore un diagrama cinemático, con el extremo del mango como punto de interés. Además calcule los grados de libertad del dispositivo

EJEMPLO I
1.- Identifique la bancada: La parte de atrás sirve como base y puede atornillarse a la pared, por lo tanto, se designa como bancada
2.- Identifique todos los demás eslabonesEslabón 1: BancadaEslabón 2: MangoEslabón 3: Bloque usado como superficie trituradora o aplastadoraEslabón 4: Barra que conecta el bloque aplastador y el mango3.- Identifique las uniones: Se utilizan tres uniones de perno para conectar estas partes diferentes. Un perno une el mango con la base. Esta unión se etiqueta como A. Se usa un segundo perno para conectar el eslabón 4 con el mango. Esta unión se identifica como B. Un tercer perno une el bloque triturador y el eslabón 4, esta unión se identifica como C.
El bloque triturador de desliza verticalmente durante la operación, de modo que una unión de corredera conecta el triturador con la base, esta unión se identifica como D.
4.- Identifique los puntos de interés: Se desea conocer el movimiento del extremo del mango, se designa como el punto de interés X.

EJEMPLO I
5.- Elabore un diagrama cinemático
6.- Calcule la movilidad: Con los 4 eslabones y las 3 uniones de perno y 1 de corredera, se tiene n= 3, j= 3 y k = 0
M= 3(n – 1) – 2j – k =3(4 – 1) – 2(3) - 0= 1
Esto significa que el mecanismo tiene un grado de libertad.

EJEMPLO II
• 2.-Un pie de balancín estabilizador para un camión. Elabore un diagrama cinemático con la parte inferior de la pierna estabilizadora como un punto de interés. También calcule el grado de libertad.

EJEMPLO II
1.- Identifique la bancada: Cuando se utiliza el balancín como estabilizador, el camión esta detenido, de modo que se designa el camión como la bancada. El movimiento de los demás eslabones se determina en relación con el camión. La bancada se identifica como eslabón 1.
2.- Identifique todos los demás eslabonesEslabón 1: BancadaEslabón 2: Pie de balancín o estabilizadorEslabón 3: CilindroEslabón 4: Pistón / varilla3.- Identifique las uniones: Se usan tres uniones de perno para conectar las partes. Una conecta la pierna estabilizadora con la bancada del camión, la cual se identifica como la unión A. Otra conecta la pierna estabilizadora con la varilla del cilindro y se identifica como la unión B. La última unión de perno conecta el cilindro con la bancada del camión y se identifica como la unión C.
Hay una unión de corredera en el cilindro, la cual conecta el pistón/varilla con el cilindro. Se identifica como la unión D.

EJEMPLO II
4.- Identifique los puntos de interés: El pie estabilizador es parte del eslabón 2, mientras que el punto de interés ubicado en la parte inferior del pie se identifica como el punto de interés X.
5.- Elabore un diagrama cinemático
6.- Calcule la movilidad: Con los 4 eslabones y las 3 uniones de perno y 1 de corredera, se tiene n= 3, j= 2 y k = 1
M= 3(n – 1) – 2j – k =3(3 – 1) – 2(2) - 1= 1
Esto significa que el mecanismo tiene un grado de libertad.

EJEMPLO III
• 3.- Una mesa levadiza que se usa para ajustar la altura de trabajo de diferentes objetos. Elabore un diagrama cinemático y calcule los grados de libertad

EJEMPLO III
1.- Identificar la bancada: La placa inferior de la mesa esta en una superficie fija y la consideramos como la bancada. No se considera la rotación fuera del plano del tornillo, solamente la traslación relativa de la tuerca se incluye en el modelo cinemático. Por lo tanto, el tornillo también se considera parte de la bancada. El movimiento de los demás eslabones se determinará en relación con esta placa de base inferior, la cual se identifica como el eslabón 1.2.-Identificar los demás eslabones.Eslabón 2: Tuerca.Eslabón 3: Brazo de soporte que conecta la mesa y la tuerca.Eslabón 4: Brazo de soporte que conecta el soporte fijo y la ranura de la mesa.Eslabón 5: Mesa.Eslabón 6: Eslabón utilizado con el perno de la corredera y la ranura por separado.

EJEMPLO III
• 3.- Identificar las uniones: La unión de corredera modela el movimiento de la tuerca y la denominamos A. B es la unión de los dos brazos de soporte. C es la ranura modelada como corredera. D es la unión de la mesa con el eslabón 3. E es la unión del eslabón 4 y la bancada.

EJEMPLO III

EJEMPLO IV
• La figura 1.29 muestra una prensa mecánica que sirve para ejercer grandes fuerzas e insertar una parte pequeña en una más grande. Con el extremo del mango como punto de interés, elabore un diagrama cinemático y calcule, además los grados de libertad.
1.-Identificar la bancada: Como la parte inferior de la prensa se encuentra sobre un banco de trabajo y no se mueve durante la operación, esta se toma como la bancada y es marcada como el eslabón 1.

EJEMPLO IV
2.- Identificar los demás eslabones.Eslabón 2: Mango.Eslabón 3: Brazo que conecta el mango con los otros dos brazos.Eslabón 4: Brazo que conecta la base con los otros dos brazos.Eslabón 5: Cabeza de la prensa.Eslabón 6: Brazo que conecta la cabeza de la prensa con los otros brazos.3.- Identificar las uniones. A unión que conecta la base y el mango. B la que conecta el eslabón 3 con el mango. C unión que conecta el eslabón 4 con la base.D es la que conecta el eslabón 6 con la cabeza de la prensa. E y F son los pernos que conectan los eslabones 3, 4 y 6. G unión que conecta la cabeza de la prensa con la base.
4.- Identifique los puntos de interés.Como el movimiento del extremo del mango es el que deseamos conocer, entonces es marcado como el punto de interés X.

EJEMPLO IV

EXCEPCIONES DE LA ECUACIÓN DE GRUEBLER.
• La ecuación de Gruebler no es del todo acertada ya que en ciertos casos especiales el resultado de la movilidad es erróneo. Ya que la ecuación no toma en cuenta la geometría de los eslabones. Un caso especial es el siguiente mecanismo:

CRITERIO DE GRASHOF.
• El mecanismo de cuatro barras.El eslabonamiento más simple y más común es el eslabonamiento de cuatro barras. Es una combinación de cuatro eslabones, uno designado como la bancada y conectado por cuatro uniones de perno.
Criterio de Grashof.La siguiente nomenclatura e utiliza para describir la longitud de los cuatro eslabones
s= longitud del eslabón más cortop= longitud de uno de los eslabones de longitud intermediaq= longitud del otro eslabón de longitud intermedial= longitud del eslabón más largo

CRITERIO DE GRASHOF.
El teorema de Grashof establece que un mecanismo de cuatro barras tiene al menos un eslabón giratorio si:s+ l < p+ qA la inversa, los tres eslabones que no están fijos solamente asilarán si: s+ l >p+ q


DOBLE MANIVELA
• Este mecanismo tiene el eslabón mas corto. En este caso los dos eslabones giran revoluciones completas. A este mecanismo se le conoce también como eslabón de arrastre.

MANIVELA-BALANCÍN
• En este caso el eslabón mas corto al girar hace que el eslabón de salida oscile con ciertos limites. Así el eslabón mas corto es la manivela y el de salida como el balancín.

DOBLE BALANCÍN
• En la configuración de doble balancín el acoplador completa la revolución pero los eslabones de entrada y salida solo oscilan.

MECANISMO DE PUNTO DE CAMBIO.
• En este mecanismo la suma de sus lados es igual. En esta configuración los movimiento del mecanismo se vuelven indeterminados, puede permanecer como un paralelogramo o contraria a esta posición y esta es la razón de su singularidad.

TRIPLE BALANCÍN
• En el mecanismo de triple balancín ningún eslabón completa una revolución por lo que los tres solo se balancean.

MECANISMO DE MANIVELA-CORREDERA
• Otro mecanismo común es el de manivela-corredera, la cuela consiste también en una combinación de cuatro eslabones, con uno designado como la bancada. Este mecanismo, sin embargo, está conectado por tres uniones de perno y una unión de corredera.

MECANISMOS DE LÍNEA RECTA
• Los mecanismos de línea recta hacen que un punto tenga trayectoria en línea recta sin que esté guiado por una superficie plana. Históricamente, las uniones prismáticas de calidad que permiten el movimiento suave, recto, sin cambios, bruscos, han sido difíciles de fabricar.

MECANISMOS DE RETORNO RÁPIDO
• Los mecanismos de retorno rápido tienen un avance más rápido en la dirección que en otra, cuando son impulsados a velocidad constante con una actuador giratorio. Se utiliza comúnmente en máquinas-herramientas que requieren una carrera de corte lento y una de retorno rápido.

MECANISMOS DE PARALELOGRAMO
• Los mecanismos están formados con frecuencia por eslabones que integran paralelogramos para mover un objeto sin alterar su paso. Dicho mecanismos crean movimiento paralelo para aplicaciones como las básculas, el timón de planeadores y las persianas para ventanas.

MECANISMO DE YUGO ESCOCÉS
• Es un mecanismo común que convierte el movimiento de rotación en un movimiento lineal deslizante, o viceversa.
• En comparación con la manivela – corredora, el yugo escocés tiene la ventaja de menos tamaño y menos parte móviles, pero suele experimentar un desgaste rápido en la ranura.

MECANISMO DE UN GRADO DE LIBERTAD

MECANISMO DE TRES GRADOS DE LIBERTAD

TRABA JO V I
SINTESIS EVALUATIVA CAPITULO I

INTRODUCCION
• La gran importancia que tienen los mecanismos en la actualidad hace que sean objetivo de estudio para ingenieros. La creación de nuevas tecnologías dependen de manera general en la creación de nuevos mecanismos, para facilitar los procesos de manufactura disminuyendo los costos y el tiempo mejorando la vida cotidiana, por ello su importancia.

MAQUINAS Y MECANISMOS
• Las maquinas son dispositivos que modifican, dirigen y transmiten fuerzas aplicadas para llevar a cabo una tarea especifica.• Por otra parte los mecanismos son los
componentes que integran a las maquinas, son el corazón de las maquinas.• La síntesis es el proceso de desarrollo de un
mecanismo para satisfacer los requerimientos de funcionamiento de una maquina.• El análisis garantiza que el mecanismo se
moverá de tal modo que cumplirá con los requerimientos.

LA CINEMÁTICA
• Es la rama de la Física que estudia las leyes del movimiento de los cuerpos (posición, desplazamiento, rotación, rapidez, velocidad y aceleración), sin tomar en cuenta las causas que lo producen, limitándose esencialmente, al estudio de la trayectoria en función del tiempo.

TERMINOLOGÍA DE MECANISMOS
• Los eslabones son las partes individuales del mecanismo y se consideran cuerpos rígidos que están conectados con otros eslabones para transmitir movimiento y fuerzas.
• Una unión es una conexión móvil entre los eslabones que permite el movimiento relativos entre ellos.
• Un eslabón simple es un cuerpo rígido que solo tiene dos uniones que se conectan con otros eslabones
• Un eslabón complejo es un cuerpo rígido que contiene mas de dos uniones
• Un punto de interés es un punto del eslabón donde el movimiento tiene un interés especial.

DIAGRAMAS CINEMÁTICOS
• Para el análisis del movimiento de una máquina, es frecuentemente difícil visualizar el movimiento de los componentes de un dibujo de ensamble completo. La figura muestra una máquina que usa minerales sobre una línea de ensamble. Un motor produce una fuerza rotacional, el cual impulsa a un mecanismo que mueve el cigüeñal de un equipo sincronizado.

DIAGRAMAS CINEMÁTICOS
• Es más fácil representar las piezas en forma de esqueleto, tal que sólo las dimensiones que influyen en el movimiento del mecanismo son mostradas. Los bosquejos de mecanismos son frecuentemente referidos como diagramas cinemáticos. El propósito de estos diagramas es similar a un esquema de un circuito eléctrico o diagramas de tuberías, en que representan variables que afectan la función principal del mecanismo. La figura muestra los símbolos típicos usados en la creación de diagramas cinemáticos.

DIAGRAMAS CINEMÁTICOS

DIAGRAMAS CINEMÁTICOS
• Un diagrama cinemático se debe dibujar a una escala proporcional al mecanismo real. Por conveniencia, se numeran los eslabones, iniciando con la bancada como eslabón número 1. Para evitar confusión, los pares cinemáticos se marcarán con letras (R para revolutas y P para prismáticos) con dos números como subíndices, los cuales representarán a los eslabones que contactan. • Ejemplo 1. La figura muestra una guillotina, la
cual es usada para cortar tablillas laminadas electrónicas. Dibuje el diagrama cinemático.

DIAGRAMAS CINEMÁTICOS
=

INVERSIÓN CINEMÁTICA
• El uso de eslabones alternos como eslabones fijos se conoce como inversión cinemática.
• El movimiento absoluto se mide con respecto a una bancada y el movimiento relativo de un punto se mide con respecto a otro eslabón.
• Movilidad• Una propiedad importante en el análisis de mecanismos es
el numero de grados de libertad del eslabonamiento. El grado de libertad es el numero de entradas independientes requeridas para posicionar con exactitud todos los eslabones de un mecanismo con respecto al suelo.
• De igual foma se puede definir como el numero de actuadores necesarios para operar el mecanismo.

ECUACIÓN DE GRUEBLER
• Los grados de libertad para eslabonamientos planos conectados con uniones se calculan con la ecuación de Gruebler.
M= Grados de libertad = 3(n – 1) – 2j – kn = Numero total de eslabones en el mecanismo.j = Numero total de uniones principales (uniones de pernos o de correderas.k = Número total de uniones de orden superior ( uniones de levas o engranes).

ACTUADORES E IMPULSORES
Son dispositivos que proporcionan movimiento y energía para operar un mecanismo.
Algunos de los mas comunes son:• Motor eléctrico de corriente alterna• Motor eléctrico de corriente continua• Motor de gasolina• Servomotores• Motores de aire o hidráulicos• Cilindros hidráulicos o neumáticos• Actuadores de tornillo • Mecanismos manuales

CASOS ESPECIALES DE LA ECUACIÓN DE MOVILIDAD.
• La importancia del conocimiento de los grados de libertad de un mecanismo radica en los actuadores necesarios para que el sistema este en control. Por ello es necesario utilizar con cuidado la ecuación de Gruebler tomando en cuenta los casos especiales en las uniones.

UNIONES COINCIDENTES.
• En los mecanismos existe uniones donde se encuentran tres eslabones conectados. En estos casos se toman como si existieran dos pernos en lugar de uno en la conexión para que el análisis del modelado cinemático sea correcto