InIntroducción a Los Robots Industrialestroducción a Los Robots Industriales
Upload
montze-sanchezCategory
view
36download
0
Historia de los
robots
Esc. Sec. Prof. Moisés Sáenz
Elaborado por:
Montserrat Sánchez Valseca
Asesorado por:
Alexandra Mendoza Ortiz
Introducción:
Querido lector:
Esta presentación es con el propósito de dar a conocer como al inicio lo dice: «la historia de los robots» así como su estructura sus características entre muchos otros
aspectos.Esperando este trabajo sea de su
agrado y se divierta…
Introducción

Un robot es una entidad virtual o mecánica artificial. En la práctica, esto es por lo general un sistema electro-mecánico que, por su apariencia o sus movimientos, ofrece la sensación de tener un propósito propio.La palabra robot puede referirse tanto a mecanismos físicos como a sistemas virtuales de software.
¿Que es un robot?

Estructura de un robot
Un robot esta formado por los siguientes elementos:
estructura mecánica
Transmisiones
sistema de accionamiento
sistema sensorial
sistema de control
elementos terminales.
Sistemas de Robots básicos
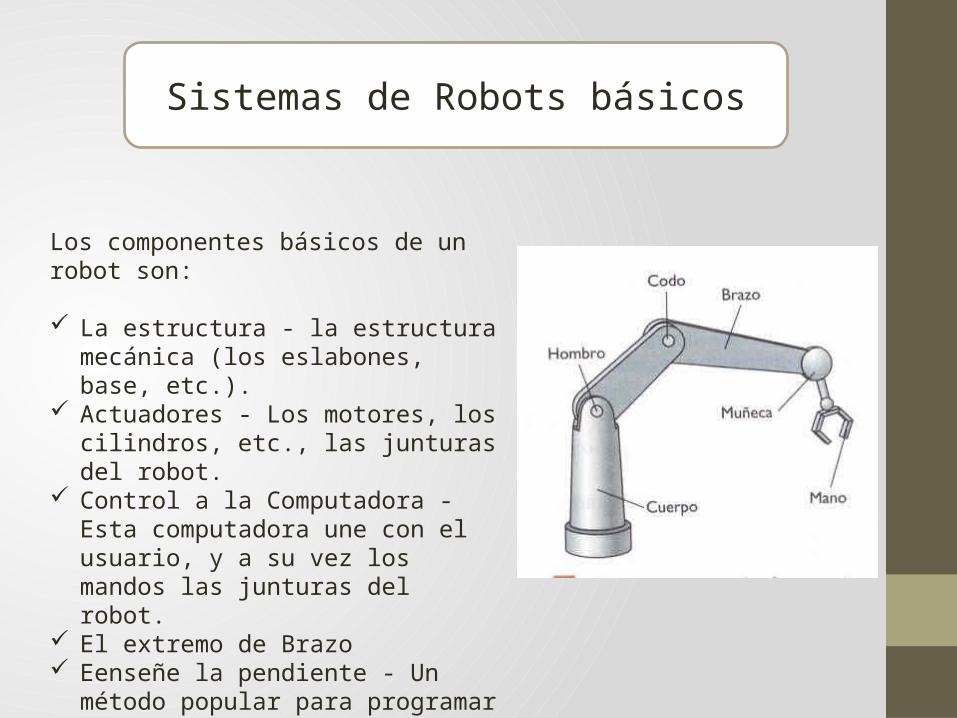
Los componentes básicos de un robot son:
La estructura - la estructura mecánica (los eslabones, base, etc.).
Actuadores - Los motores, los cilindros, etc., las junturas del robot.
Control a la Computadora - Esta computadora une con el usuario, y a su vez los mandos las junturas del robot.
El extremo de Brazo Eenseñe la pendiente - Un método
popular para programar el robot.
Características básicas
Las características básicas de un robot son:
Los eslabones y Junturas El grado de Libertad (el gdl) La orientación Eslabón Los elementos de la posición El Punto de Centro de herramienta (TCP) El espacio de trabajo La velocidad La carga útil:
Repetitividad La exactitud Tiempo de establecimiento Control de la Resolución Las coordenadas
La robótica tienen unas evidentes características diversas para que se puedan desarrollar y aplicar la tarea la cual piensan hacer; de ellas son las siguientes:
-MOVIMIENTO: Posee un sistemas de coordenadas en el cual el robot se pueda desplazar: • Cartesianas. • *Cilíndricas. • *Polares.
-ENERGIA: Un robot es importante donde tenga una fuente de energía para poder convertirla en trabajo donde efectúa algún movimiento.
Características básicas
-Grados de libertad: Los grados de libertad se utilizan en conocer la posición de cada actuador y articulación del robot para así el efector final este en posición para realizar alguna tarea programada.
-Captación de información: Son los sensores donde le dan al robot una información necesaria para desempeñar una actividad
-Autonomía: Es la forma en la cual el robot desempeña alguna actividad; con el utiliza miento de la inteligencia artificial.
Características básicas
Algunas características distintas que pueden poseer encontramos:
• La precisión que tienen a la hora de realizar una acción o movimiento.
• La capacidad de carga, en kilogramos que el robot puede manejar.
• El grado de libertad que tienen con sus movimientos.
• El sistema de coordenadas que especifica a que direcciones se realizaran sus movimientos y posiciones. Estas pueden ser coordenadas cartesianas (x,y,z), cilíndricas, al igual que polares.
• La programación de cada robot o el poder de aprendizaje que cada uno tiene.
Características básicas
Aplicaciones
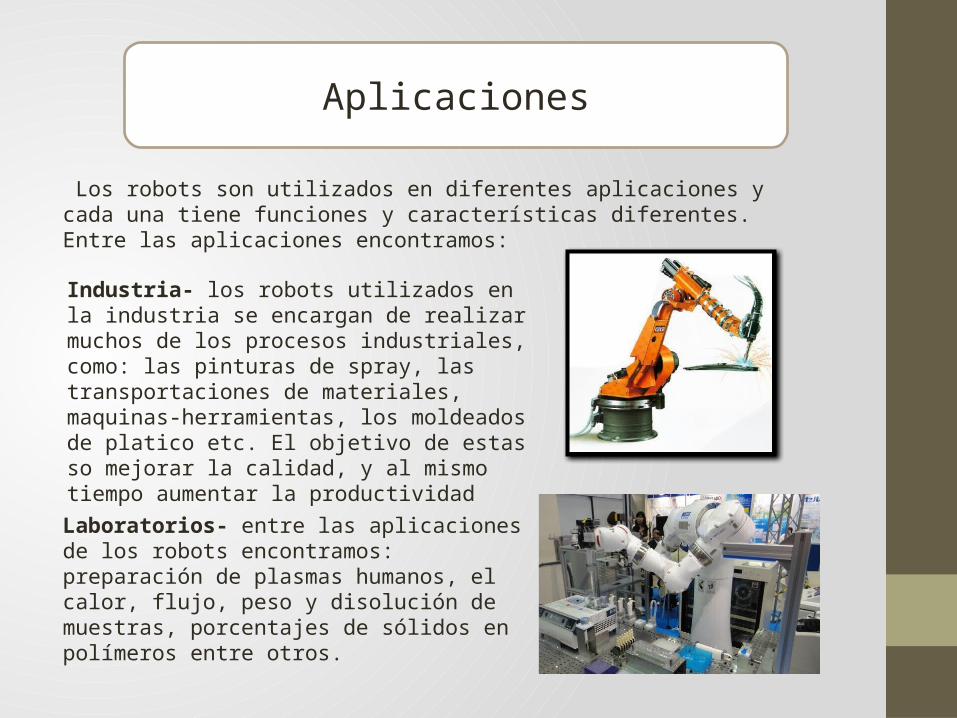
Industria- los robots utilizados en la industria se encargan de realizar muchos de los procesos industriales, como: las pinturas de spray, las transportaciones de materiales, maquinas-herramientas, los moldeados de platico etc. El objetivo de estas so mejorar la calidad, y al mismo tiempo aumentar la productividad
Los robots son utilizados en diferentes aplicaciones y cada una tiene funciones y características diferentes. Entre las aplicaciones encontramos:
Laboratorios- entre las aplicaciones de los robots encontramos: preparación de plasmas humanos, el calor, flujo, peso y disolución de muestras, porcentajes de sólidos en polímeros entre otros.

Aplicaciones
Espacio- los robots son utilizados para realizar exploraciones espaciales
Manipuladores Cinemáticas- realiza la aplicaron del manejo de materiales radiactivos y las inspecciones de tuberías en áreas de alta radiación.
Submarinos- los robots realizan inspecciones y mantenimientos de tuberías de petróleo, gas o aceite en las plataformas oceánicas.
Educación- los robots se han vuelto muy populares en el área de educación. Ellos son utilizados como: medios de enseñanza, en especial ciencias computacionales y en los salones de clase.
Tipos de robots creados a lo largo de la historia
Algunos ejemplos de estos robots creados a lo largo de la historia son:
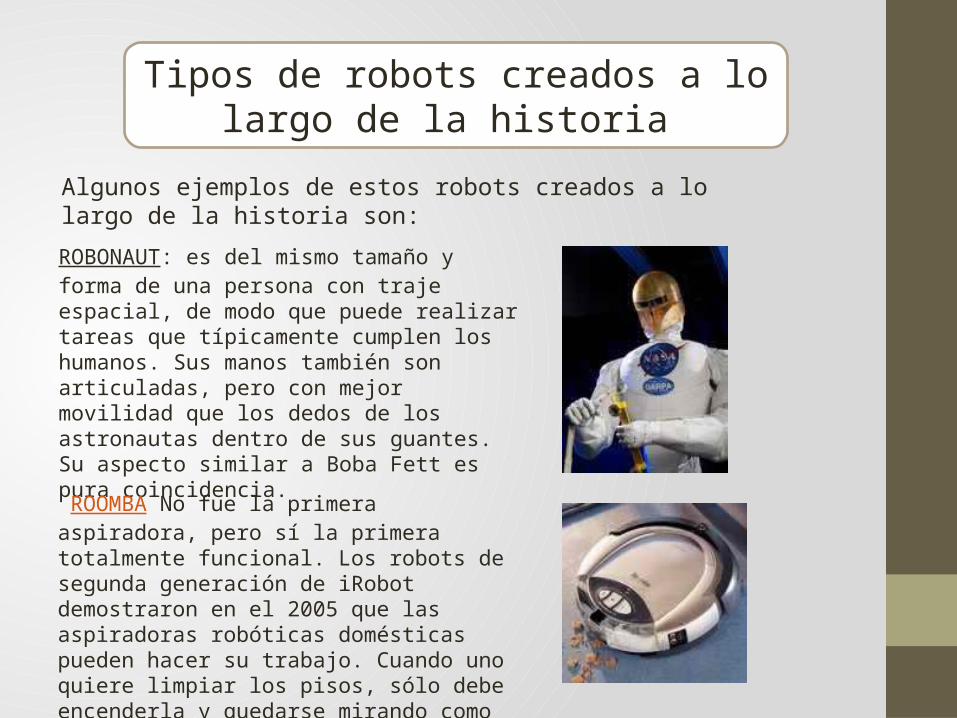
ROBONAUT: es del mismo tamaño y forma de una persona con traje espacial, de modo que puede realizar tareas que típicamente cumplen los humanos. Sus manos también son articuladas, pero con mejor movilidad que los dedos de los astronautas dentro de sus guantes. Su aspecto similar a Boba Fett es pura coincidencia.
ROOMBA No fue la primera aspiradora, pero sí la primera totalmente funcional. Los robots de segunda generación de iRobot demostraron en el 2005 que las aspiradoras robóticas domésticas pueden hacer su trabajo. Cuando uno quiere limpiar los pisos, sólo debe encenderla y quedarse mirando como lo hace.

Tipos de robots creados a lo largo de la historia
• ELEKTRO Y SPARKO El ingeniero Joseph Barnett de Westinghouse se presentó en la Feria Mundial de 1939 con un hombre de metal de 2,10 metros de altura, controlado por cables, que podía caminar, decir 77 palabras y hasta fumar cigarrillos. Al año siguiente le fabricó un mejor amigo a su robot: un perro robótico que parecía ladrar y se sentaba en respuesta a los comandos de Elektro.
• ELSIE Y ELMER El neurólogo W. Grey Walter creó en 1940 unas tortugas mecánicas que fueron los primeros robots eléctricos autónomos. Programados para seguir una luz y retroceder al chocar con un objeto, podían encontrar sus iluminadas estaciones de carga, aunque hubiese algo interpuesto en sus caminos.
Tipos de robots creados a lo largo de la historia
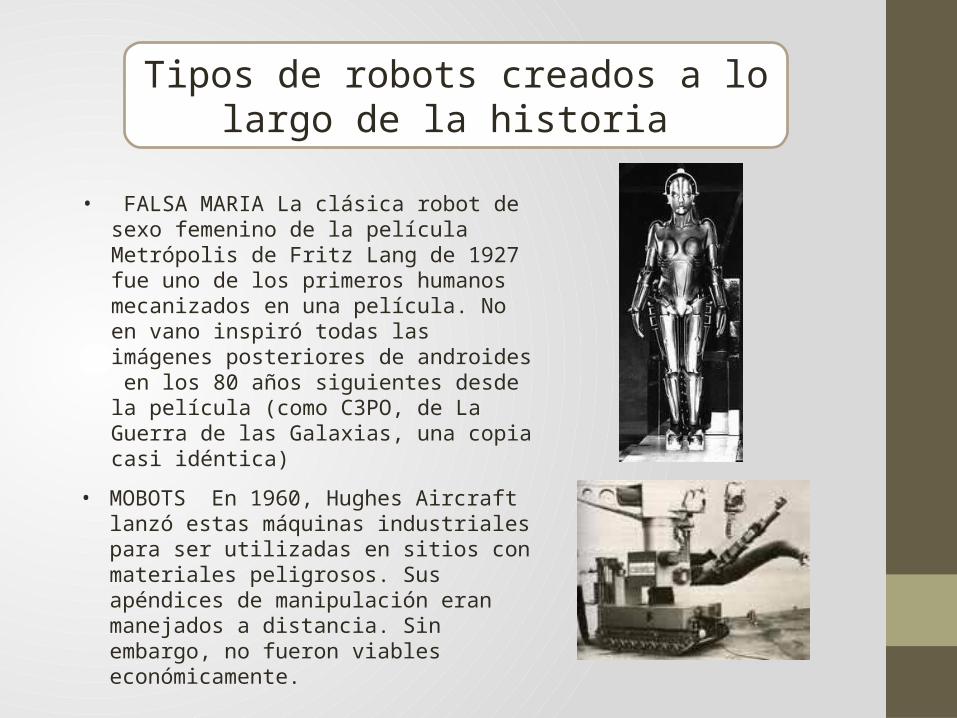
• FALSA MARIA La clásica robot de sexo femenino de la película Metrópolis de Fritz Lang de 1927 fue uno de los primeros humanos mecanizados en una película. No en vano inspiró todas las imágenes posteriores de androides en los 80 años siguientes desde la película (como C3PO, de La Guerra de las Galaxias, una copia casi idéntica)
• MOBOTS En 1960, Hughes Aircraft lanzó estas máquinas industriales para ser utilizadas en sitios con materiales peligrosos. Sus apéndices de manipulación eran manejados a distancia. Sin embargo, no fueron viables económicamente.
Conclusión
En conclusión decimos que:
Un Robot es una máquina que puede programarse para que interactúe con objetos y
lograr que imite, en cierta forma, el comportamiento humano o animal. Que puede
desempeñar distintas tareas y actividades según su uso.
Bibliografía
• http://www.idr.mx/idr7374/index.php/nuestroscursos2/40-conceptoscategoria/32-robot
• http://proton.ucting.udg.mx/materias/robotica/r166/r66/r66.htm
• http://creandoelfuturo.net/es/morfologia-del-robot/estructura-mecanica-robot
• http://robotcamixo.blogspot.mx/2010/11/caracteristicas-generales-de-los-robots.html
• http://robotica100.blogspot.mx/p/caracteristicas-de-la-robotica-y.html
• http://robotcamixo.blogspot.mx/2010/12/aplicaciones-de-los-robots.html
• http://axxon.com.ar/not/158/c-1580042.htm