MÁSTER EN YOGA MÁSTER EN PILATES MÁSTER EN COACHING DEPORTIVO

II Máster Energía Solar y Renovables
Módulo: Energía eólica
Tema 4: Aerogeneradores

II Máster de Energía Solar y Renovables: Módulo Energía Eólica Índice Tema 3: Aerogeneradores
1. Tipos de aerogeneradores. 1.1. Clasificación. 1.2. Clasificación por rendimiento aerodinámico.
2. Aerogeneradores de eje horizontal. 2.1. Clasificación.
2.1.1. Clasificación por tamaño. 2.1.2. Clasificación por el número de palas del rotor. 2.1.3. Clasificación por el tipo de generador eléctrico. 2.1.4. Clasificación por la velocidad de giro del rotor. 2.1.5. Clasificación por el tipo de palas.
2.1.6. Clasificación por la resistencia al viento. 3. Partes de un sistema eólico.
3.1. Rotor. 3.1.1. Palas. 3.1.2. Buje o cubo. 3.1.3. Nariz.
3.2. Multiplicadora o caja de engranajes. 3.3. Generador eléctrico.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 2
II Máster de Energía Solar y Renovables: Módulo Energía Eólica Índice Tema 3: Aerogeneradores
3.3.1. Generador asíncrono. 3.3.2. Generador síncrono. 3.3.3. Configuraciones.
3.4. Sistemas de regulación de potencia y velocidad. 3.4.1. Variación del ángulo de paso de las palas. 3.4.2. Control por desprendimiento de flujo.
3.5. Sistemas de orientación. 3.6. Conexiones a red. 3.7. Dispositivos de seguridad. 3.8. Electrónica de control. 3.9. 3.10. Torres.
3.4.1. Torres de celosía. 3.4.2. Torres tubulares.
4. Curvas características de un aerogenerador. 4.1. Curva de potencia de un aerogenerador. 4.2. Coeficiente de empuje.
5. Elección del aerogenerador.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 3

1. Tipos de aerogeneradores eólicos
Al seleccionar el aerogenerador idóneo para unas condiciones de viento tenemos dos datos de partida fundamentales:
- El régimen de vientos disponible, que va fijar cuál es la máquina que más adecuadamente puede aprovechar las corrientes de viento incidentes.
- La energía que deseamos obtener en un periodo de tiempo dado, y que va a determinar el área que debe barrer el rotor (A) y, en definitiva, el tamaño de la máquina.
Nos centraremos en los distintos tipos de rotores eólicos que podemos encontrar. Entre ellos existen diferencias de rendimiento notables, resultando cada uno más adecuado a un determinado régimen de vientos.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 4

1. Tipos de aerogeneradores eólicos
En un perfil aerodinámico inmerso en una corriente de viento y que al perturbar el flujo crea un gradiente de presiones entre ambas caras, de las que resulta una fuerza resultante F.
Las proyecciones de la fuerza resultante, F, da lugar a una fuerza paralela al viento, fuerza de resistencia, y una perpendicular al mismo, fuerza de sustentación.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 5
1.1. Clasificación
1. Tipos de aerogeneradores eólicos
• Paralelo al viento
• Barlovento
• Sotavento
• Perpendicular (Savonius, eje horizontal)
Eje horizontal
• Resistencia (Savonius, eje vertical)
• Sustentación (Darrieus)
• Combinada (Darrieus + Savonius)
Eje vertical
• Utilización pared deflectora
• Utilización solar
• Utilización efecto venturi
• Utilización del vórtice combinado
Otros
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 6
1.1. Clasificación

1. Tipos de aerogeneradores eólicos
Aerogeneradores de eje horizontal
El eje de giro es paralelo a la dirección del viento (aerogeneradores convencionales).
En función de la disposición del rotor frente al viento los aerogeneradores de eje horizontal se dividen en:
A barlovento: - El rotor se dispone enfrentado al viento y antes de la torre que lo sustenta. - Disposición más común entre los aerogeneradores de eje horizontal para
producción de energía en parques eólicos. - El viento incide con toda su energía sobre las palas del rotor sin salvar ningún
obstáculo previo. - Para orientar la máquina frente al viento, es necesario un sistema activo
basado en un motoreductor.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 7
1.1. Clasificación
A sotavento - El rotor se dispone orientado pero tras la torre. - La extracción de energía se ve reducida por el
obstáculo que supone la torre para el viento. - Se emplea en aerogeneradores de baja y muy
baja potencia.

1. Tipos de aerogeneradores eólicos
Aerogeneradores de eje vertical
Dentro de este tipo de turbinas se pueden destacar los siguientes diseños:
• Máquina de rotor tipo Savonious, cuya sección recta tiene forma de S y en la que la acción fundamental del viento sobre ella tiene el carácter de resistencia. Esta máquina tiene un rendimiento bajo, por lo que únicamente es idónea, por su simplicidad, para potencias muy pequeñas.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 8
1.1. Clasificación

1. Tipos de aerogeneradores eólicos
Aerogeneradores de eje vertical
• Máquinas de rotor tipo Darrieus integrada por varias palas cuya sección recta tiene la forma de un perfil aerodinámico. Las palas están unidas por sus extremos al eje vertical, estando arqueadas en una forma similar a la que tomaría una cuerda girando alrededor del eje.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 9
1.1. Clasificación

1. Tipos de aerogeneradores eólicos
Las ventajas que presentan los aerogeneradores de eje horizontal son las siguientes:
1. Su rendimiento (coeficiente de potencia) es mayor que el correspondiente a los de eje vertical.
2. Su velocidad de rotación es más elevada que la de los aerogeneradores Darrieus (requieren cajas de engranajes con menor relación de multiplicación).
3. La superficie de la pala es menor que en los modelos de eje vertical para una misma área barrida.
4. Los sistemas de sujeción de los modelos Darrieus impiden elevar la turbina tanto como en los modelos de eje horizontal. Para una misma área barrida se obtendrá menor potencia en los de tipo Darrieus por aprovecharse menos el aumento de la velocidad del viento con la altura.
Como contrapartida, los aerogeneradores Darrieus tienen las siguientes ventajas:
1. Su simetría vertical hace innecesario el uso de un sistema de orientación, como ocurre con las máquinas de eje horizontal para alinear el eje de la turbina con la dirección del viento.
2. La mayoría de los componentes que requieren mantenimiento están localizados a nivel del suelo.
3. No requieren mecanismo de cambio de paso en aplicaciones a velocidad constante.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 10
1.1. Clasificación

1. Tipos de aerogeneradores eólicos
Otros
Existen otros dispositivos, más o menos ingeniosos utilizando como:
- El efecto venturi.
- El calentamiento solar.
- La vorticidad inducida
- Pared deflectora.
Aunque todos ellos son de mucha menor aplicación.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 11
1.1. Clasificación

1. Tipos de aerogeneradores eólicos
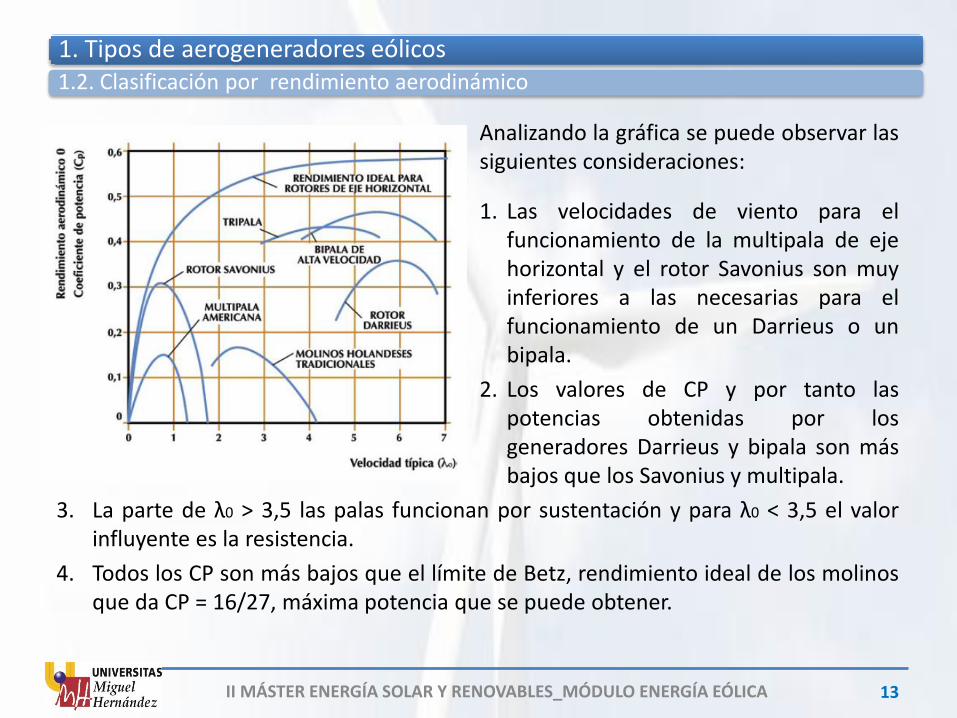
En la gráfica se muestran los rendimientos aerodinámicos de los distintos tipos de máquinas eólicas. Dichos valores están representados en función de la velocidad específica λ0 definida como:
λ0 =Ω∙𝑅
𝑉
siendo
Ω velocidad de giro;
R radio de la pala;
V la velocidad del viento incidente sobre el rotor.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 12
1.2. Clasificación por rendimiento aerodinámico
1. Tipos de aerogeneradores eólicos
Analizando la gráfica se puede observar las siguientes consideraciones:
1. Las velocidades de viento para el funcionamiento de la multipala de eje horizontal y el rotor Savonius son muy inferiores a las necesarias para el funcionamiento de un Darrieus o un bipala.
2. Los valores de CP y por tanto las potencias obtenidas por los generadores Darrieus y bipala son más bajos que los Savonius y multipala.
3. La parte de λ0 > 3,5 las palas funcionan por sustentación y para λ0 < 3,5 el valor influyente es la resistencia.
4. Todos los CP son más bajos que el límite de Betz, rendimiento ideal de los molinos que da CP = 16/27, máxima potencia que se puede obtener.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 13
1.2. Clasificación por rendimiento aerodinámico

1. Tipos de aerogeneradores eólicos
Según la velocidad específica λ0 los aerogeneradores se clasifican en:
Lentos:
- Aquellos que presentan una curva característica centrada en valores λ0<2.
- Se utilizan en aplicaciones mecánicas en las que se requiere gran par como por ejemplo las aerobombas.
- Bajo coeficiente de potencia por lo que no son recomendables para la producción de energía.
Rápidos:
- Aquellos que presentan una curva característica centrada en valores de λ0>2.
- Se utilizan en aplicaciones de producción de energía eléctrica al presentar curvas con valores altos del coeficiente de potencia Cp.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 14
1.2. Clasificación por rendimiento aerodinámico

2. Aerogeneradores de eje horizontal
• Microaerogeneradores
• Miniaerogeneradores
• Aerogeneradores de pequeña potencia
• Aerogeneradores de media potencia
• Aerogeneradores de alta potencia
Tamaño
• Monopala
• Bipala
• Tripala
• Multipala
Número de palas del rotor
• Asíncronos
• Síncronos
Generador eléctrico
• Aerogenerador de velocidad constante de rotor
• Aerogenerador de velocidad variable de rotor
Velocidad de giro del rotor
• Palas de paso fijo
• Palas de paso variable
Tipo de palas
• Clase del aerogenerador
• I, II, III o especial
• A,B o C
Resistencia al viento
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 15
2.1. Clasificación

2.1. Clasificación
Microaerogeneradores - Potencia inferior a 1 kW. - Presentan un radio del rotor menor de 1 m. - Sus aplicaciones representativas son: embarcaciones, sistemas de comunicación,
refugios de montaña, iluminación, etc. Miniaerogeneradores - Potencia comprendida entre 1 kW y 10 KW. - Presentan un radio de rotor comprendido entre 1 y 3 m. - Sus aplicaciones representativas son: granjas, viviendas aisladas, ,sistemas mixtos
eólico-fotovoltaicos, bombeo, etc.
Aerogeneradores de pequeña potencia - Potencia comprendida entre 10 y 100 kW. - Presentan un radio de rotor comprendido entre 3 y 9 m. - Sus aplicaciones representativas son: comunidades de vecinos, pequeñas
empresas, sistemas mixtos eólico-diesel, drenaje, tratamiento de aguas, etc.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 16
2.1.1. Clasificación por tamaño

2.1. Clasificación
Aerogeneradores de media potencia - Potencia comprendida entre 100 y 1.000 kW. - Presentan un radio de rotor comprendido entre 9 y 27 m. - Sus aplicaciones representativas son parques eólicos en tierra y en el mar.
Aerogeneradores de alta potencia - Potencia comprendida entre 1.000 y 10.000 kW. - Presentan diámetros de rotor comprendido entre 27 y 100 m, aunque actualmente
se están incrementando los diámetros del rotor. - Sus aplicaciones representativas son parques eólicos en tierra y en el mar.
Actualmente están en fase de investigación, requiriendo nuevos diseños y materiales, distintos a los convencionales. Estas máquinas suponen un salto tecnológico que puede revolucionar los actuales sistemas de producción de energía.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 17
2.1.1. Clasificación por tamaño
«Actualmente, el aerogenerador comercial de mayor potencia es de 9 MW»
2.1. Clasificación
Monopala - Poco utilizados. - La ventajas de disminuir el número de palas, el par de accionamiento y las masas
de la máquina, pero incrementa de forma considerable la velocidad de giro y de la punta de la pala, creando problemas de emisión de ruido.
- Presentan problemas de estabilidad y fatiga. - Presentan una curva característica con valores máximos de Cp en torno a 0,4.
Bipala - Se emplean para producción de energía eléctrica en parque eólicos. - Apenas existen aerogeneradores de este tipo en instalaciones comerciales. - Siguen presentando problemas dinámicos aunque menores que los monopala. - Presentan una curva característica con valores máximos de Cp en torno a 0,45.
Tripala - Aerogeneradores más empleados para la producción de energía eléctrica. - No presentan los problemas dinámicos de los monopala y bipala. El momento de
inercia es constante para todos los ángulos azimutales circunferenciales. - Baja velocidad de punta de pala, evitando problemas de emisión de ruido. - Alcanzan unos valores mayores de Cp en su curva característica.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 18
2.1.2. Clasificación por el número de palas del rotor

2.1. Clasificación
Multipala - Aerogeneradores se caracterizan por giran a bajas velocidades y ofrecer un gran
par. - Se emplean en aplicaciones que requieren mucho par como por ejemplo la
extracción de agua a través de aerobombas. - Presentan una curva característica de picos de Cp muy bajos, del orden de 0,15,
por lo que no se emplean para producción de energía eléctrica.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 19
2.1.2. Clasificación por el número de palas del rotor
2.1. Clasificación
Según el generador eléctrico instalado en el aerogenerador se distinguen los siguientes tipos:
Generador asíncrono
Son los motores eléctrico clásicos más utilizados en cualquier aplicación industrial. Su elevada robustez y sencillez ha impulsado su empleo dentro de los aerogeneradores. Su mayor inconveniente es la necesidad de una batería de condensadores aplicada a la salida, que permite compensar el factor de potencia y la energía reactiva generada y el mal comportamiento que presenta frente a los huecos de tensión.
Generador síncrono
La generación de energía eléctrica se produce a una velocidad constante, denominada velocidad de sincronismo. Precisa una corriente de excitación continua, que se ha de generar o bien internamente (autoexitación) o bien de forma auxiliar mediante una dinamo externa. Se comportan bien frente a los huecos de tensión pero presentan el inconveniente de genera armónicos.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 20
2.1.3. Clasificación por el tipo de generador eléctrico

2.1. Clasificación
Según la velocidad de giro del rotor del aerogenerador se distinguen los siguientes tipos:
Aerogenerador de velocidad constante de rotor
Se caracterizan por mantener siempre constante la velocidad del rotor, independientemente de la velocidad del viento incidente. Presentan la ventaja de su simplicidad pero el inconveniente de una menor extracción de potencia.
Aerogenerador de velocidad variable de rotor
La velocidad del rotor se ajusta a la velocidad del viento, de tal forma que para velocidades bajas del viento se tienen velocidades bajas de rotor y para velocidades altas del viento se tienen velocidades altas de rotor. Este seguimiento por parte del rotor de la velocidad del viento permite que el coeficiente de potencia se sitúe en la zona de máximo valor, por lo que estos aerogeneradores presentan la ventaja de una mayor extracción de potencia. Por el contrario su tecnología es más sofisticada y su precio más elevado.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 21
2.1.4. Clasificación por la velocidad de giro del rotor
2.1. Clasificación
Según el tipo de palas del rotor del aerogenerador se distinguen los siguientes tipos:
Aerogenerador con palas de paso fijo
Las palas de los aerogeneradores está montada de forma fija sin posibilidad de regulación. En este caso el control de potencia es pasivo, es decir sin actuación sobre la máquina. Este tipo de palas se emplea en aerogeneradores de velocidad constante de rotor.
Aerogeneradores con palas de paso variable
Las palas de estos aerogeneradores presentan la posibilidad de giro sobre su eje, acción que se utiliza para controlar la extracción de potencia de la máquina. Este tipo de palas se emplea en aerogeneradores de velocidad variable de rotor.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 22
2.1.5. Clasificación por el tipo de palas

2.1. Clasificación
De acuerdo con lo establecido en la norma UNE-EN61400-1, que reproduce la norma de la Comisión Internacional de Electrotecnia, IEC 61400-1, los aerogeneradores se clasifican en función de las condiciones del viento, caracterizado por su velocidad y turbulencia.
Esta clasificación, que se ha realizado para una vida de los aerogeneradores de 20 años, describe el grado de robustez de la máquina, de forma que la más robusta será la apropiada para vientos más agresivos.
En la siguiente tabla se indica la clasificación según la norma IEC 61400-1. Segunda edición.1999:
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 23
2.1.6. Clasificación por su resistencia al viento
WTGS class I II III IV S
Vref (m/s) 50 42,5 37,5 30 To be
specified
Vave (m/s) 10 8,5 7,5 6
A I15 0,18 0,18 0,18 0,18
B I15 0,16 0,16 0,16 0,16
2.1. Clasificación
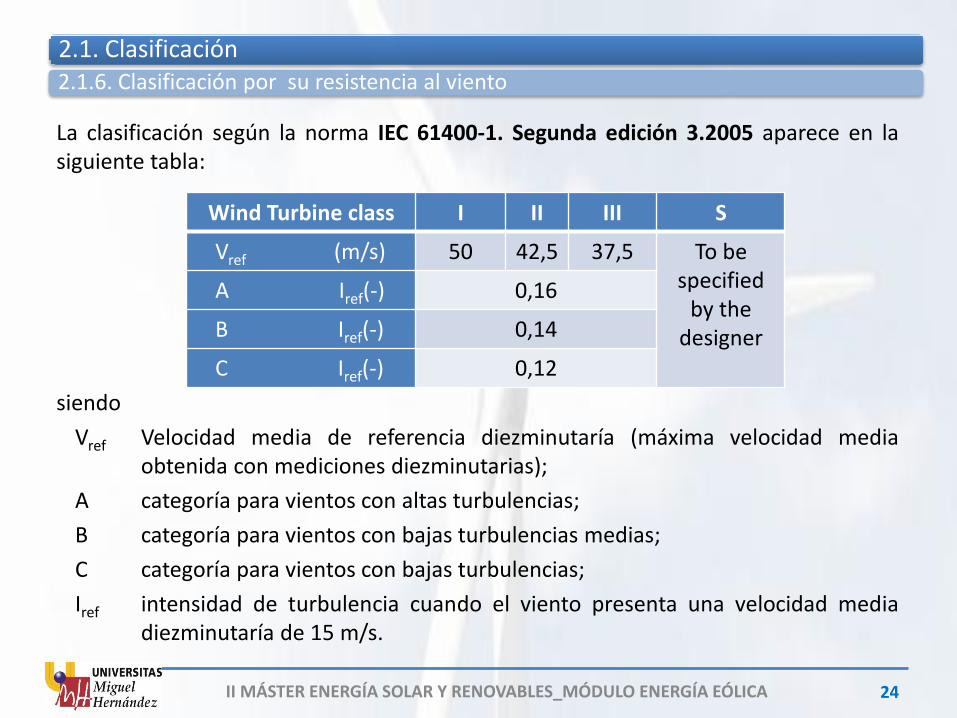
La clasificación según la norma IEC 61400-1. Segunda edición 3.2005 aparece en la siguiente tabla:
siendo
Vref Velocidad media de referencia diezminutaría (máxima velocidad media obtenida con mediciones diezminutarias);
A categoría para vientos con altas turbulencias;
B categoría para vientos con bajas turbulencias medias;
C categoría para vientos con bajas turbulencias;
Iref intensidad de turbulencia cuando el viento presenta una velocidad media diezminutaría de 15 m/s.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 24
2.1.6. Clasificación por su resistencia al viento
Wind Turbine class I II III S
Vref (m/s) 50 42,5 37,5 To be specified
by the designer
A Iref(-) 0,16
B Iref(-) 0,14
C Iref(-) 0,12

2.1. Clasificación
Se distingues tres clases (I,II y III) en función de la velocidad de referencia Vref, y tres categorías (A, B y C) en función de la intensidad de turbulencia de referencia Iref.
Cuanto menor es la clase la turbina es capaz de soportar vientos más fuertes. Cuanto menor es la letra de la categoría mayor es la intensidad de turbulencia que es capaz de soportar el aerogenerador.
Para otras condiciones de viento se define la clase S, cuyas características no están tabuladas como las indicadas anteriormente, por lo que el fabricante debe indicar para que condiciones de viento está diseñada la turbina.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 25
2.1.6. Clasificación por su resistencia al viento
«El aerogenerador más robusto es por tanto el clasificado como clase I, categoría A, designado como “clase IA”»

3. Partes de un sistema eólico
Los elementos principales de un aerogenerador de gran potencia, tripala de eje horizontal orientado a barlovento, que son los utilizados en los grandes parques eólicos para la generación de energía eléctrica, son:
- Palas. - Góndola o nacelle. - Torre o fuste.
Además, en estos aerogeneradores podemos encontrar los siguientes ángulos:
- Ángulo de guiñada (giro de orientación al viento).
- Ángulo de paso o ángulo de pitch (giro de las palas).
- Ángulo de inclinación (inclinación de nacelle). - Ángulo de conicidad (inclinación de las palas).
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 26
PALAS
GÓNDOLA O NACELLE
TORRE O FUSTE

3. Partes de un sistema eólico
Un sistema de generación eólica está formado por otros subsistemas menores que realizan una determinada función. En concreto, para las máquinas utilizadas para la generación eoloeléctrica en grandes parques, los subsistemas que podemos encontrar se presentan de manera descriptiva son:
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 27
- Rotor. - Caja de engranajes. - Generadores eléctricos. - Sistemas de regulación de
potencia y de velocidad. - Sistemas de orientación. - Sistemas de conexión a red. - Sistemas de seguridad. - Controladores electrónicos
locales. - Elementos de acoplamiento
mecánico. - Chasis principal. - Torres.
3. Partes de un sistema eólico
Los subsistemas básicos que constituyen el rotor son:
- Las palas o aspas. - El buje o cubo. - La nariz.
Su función es convertir la energía cinética del viento en la energía mecánica que se utiliza para impulsar el generador eléctrico.
El parámetro fundamental que caracteriza el comportamiento de este subsistema es el coeficiente de potencia definido como la relación entre la potencia mecánica que se desarrolla en su eje y la potencia eólica disponible en su área de barrido.
Alfred Betz calculó un valor máximo teórico del 59,26% para este parámetro. Sin embargo, desprecia factores de pérdida tales como: la fricción, rotación de la estela detrás del rotor y pérdidas en la cercanía de la punta de las palas. En la práctica, estos factores reducen el máximo de Cp a valores cercanos al 50%.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 28
3.1. Rotor
«Un rotor aerodinámico de eje horizontal, en el mejor de los casos de diseño y operación, sólo puede extraer cerca del 50% de la potencia del viento
disponible en su área de barrido.»

3. Partes de un sistema eólico
La fuerza del viento ocasiona que un rotor aerodinámico de eje horizontal gire a una cierta velocidad angular. El flujo eólico que incide sobre las palas de un rotor en movimiento depende, entre otros factores, de la relación entre la velocidad lineal de la pala y la velocidad del viento.
Así, para la geometría global de un rotor, la magnitud adimensional de este elemento está dada por:
λ =Ω ∙ 𝑅
𝑉
siendo:
λ velocidad específica; Ω velocidad de giro; R radio del rotor; V velocidad del viento incidente sobre el rotor.
El producto ΩR es la velocidad de arrastre U en el punto considerado, de modo que
λ =𝑈
𝑉
La relación entre el coeficiente de potencia del rotor Cp y λ depende, entre otros factores, de la geometría del perfil aerodinámico que se selecciona para diseñar las palas.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 29
3.1. Rotor

3.1. Rotor
Las palas están fabricadas y diseñadas con el fin de alcanzar un balance óptimo en la captación eficaz de la energía del viento y lograr una mínima carga sobre la turbina, al mismo tiempo que un funcionamiento libre de problemas.
El material utilizado para la fabricación de las palas depende:
- La forma de la aeroturbina. El conformado de la pala debe ser el adecuado y por tanto el material debe poder ser tratado y adaptado a la forma idónea sin pérdida de propiedades resistentes.
- El comportamiento del material para las distintas situaciones de carga que se puedan producir.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 30
3.1.1. Palas
«Las palas de un aerogenerador de eje horizontal son los elementos encargados de captar la energía cinética del viento»

3.1. Rotor
Las palas de una aeroturbina se diseñan bajo formas constructivas y con materiales que deben atender principalmente a los requisitos siguientes:
- Resistencia estructural: soportar las cargas máximas previsibles de ocurrir durante el período de vida de la máquina.
- Resistencia a fatiga: soportar las cargas de fatiga que aparezcan durante la vida de la máquina (25 años).
- Rigidez: Desplazamientos inferiores a los máximos permitidos, para evitar inestabilidades.
- Peso: debe ser el mínimo necesario para tener el mínimo coste y minimizar las cargas de tipo inercial y gravitatorio sobre los diversos componentes de la máquina (es crítico en grandes aeroturbinas).
- Fabricación: Facilidad de fabricación que requiera técnicas y materiales adaptados a la maquinaria y tecnología existente en la industria.
- Resistencia a los ambientes medioambientales: Resistencia a la corrosión en ambientes marinos y a la degradación por la radiación solar.
- Minimizar la emisión de ruido acústico: Diseño encaminado a producir el menor impacto acústico para facilitar la instalación de estos sistemas cerca de sitios habitados.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 31
3.1.1. Palas
3.1. Rotor
Los posibles materiales a emplear en palas de aeroturbinas:
Madera
- Ampliamente usada históricamente en la construcción de palas de rotores propulsoras en aviación y se utiliza en la actualidad en aerogeneradores de pequeño tamaño.
- Baja densidad, disponibilidad, buenas características de fatiga, bajo coste y fácil mecanizado.
- Bajas propiedades mecánicas, irregularidades (nudos), fibra no rectilínea y absorber la humedad lo que causa un deterioro en sus características mecánicas.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 32
3.1.1. Palas

3.1. Rotor
Acero
- Alta resistencia y módulo elástico, tenacidad, facilidad de fabricación mediante soldadura y bajo coste.
- Gran densidad que aumenta muy desfavorablemente las cargas gravitatorias e inerciales que actúan sobre la aeroturbina.
- Facilidad para la corrosión, obliga al adecuado tratamiento o protección superficial.
Aluminio
- Densidad muy inferior al acero y muy buenas propiedades mecánicas especificas y resistencia a la corrosión.
- Resistencia a la fatiga es en general baja, excepto si se utilizan aleaciones aeronáuticas.
- Las formas constructivas mas utilizadas serían los perfiles continuos fabricados por extrusión o a base de chapas de espesor delgado unidas mediante remaches.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 33
3.1.1. Palas

3.1. Rotor
Materiales compuestos
- Material muy apropiado para la fabricación de palas de aeroturbinas.
- Permite desarrollar complicadas formas, sumamente esbeltas, de perfiles aerodinámicos con superficies externas muy lisas para conseguir la adecuada eficiencia aerodinámica de las palas.
- Se pueden construir palas de gran robustez y resistencia para conseguir la adecuada resistencia estructural de las palas para soportar las elevadas cargas producidas durante la vida en servicio de la máquina.
- El material compuesto de fibra de vidrio y poliéster conjuga unas características de resistencia elevadas con un mínimo peso y un coste reducido.
- Versatilidad de formas de fabricación y la posibilidad de ser moldeados con las formas que se deseen, pudiéndose distribuir la resistencia y espesor de acuerdo a las exigencias del diseño.
- Bajo coeficiente de dilatación y conductividad eléctrica (buen comportamiento frente a rayos).
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 34
3.1.1. Palas

3.1. Rotor
Materiales compuestos
- El comportamiento frente a la fatiga de los materiales compuestos es superior al de otros materiales convencionales.
- Entre los inconvenientes que tienen los materiales compuestos para la fabricación de palas están:
- Materias primas todavía caras (excepto fibra de vidrio).
- Necesitan procesos de fabricación no estándar (fabricación manual).
- Comportamiento estructural no intuitivo.
- Falta de bases de datos fiables de características mecánicas.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 35
3.1.1. Palas
«Las palas de un aerogenerador actualmente se fabrican de fibra de vidrio estando formadas por un larguero de alta resistencia generalmente de
fibra de carbono y un conformado de perfil variable y altamente aerodinámico, recubierto de resina epoxi más fibra de vidrio»
3.1. Rotor
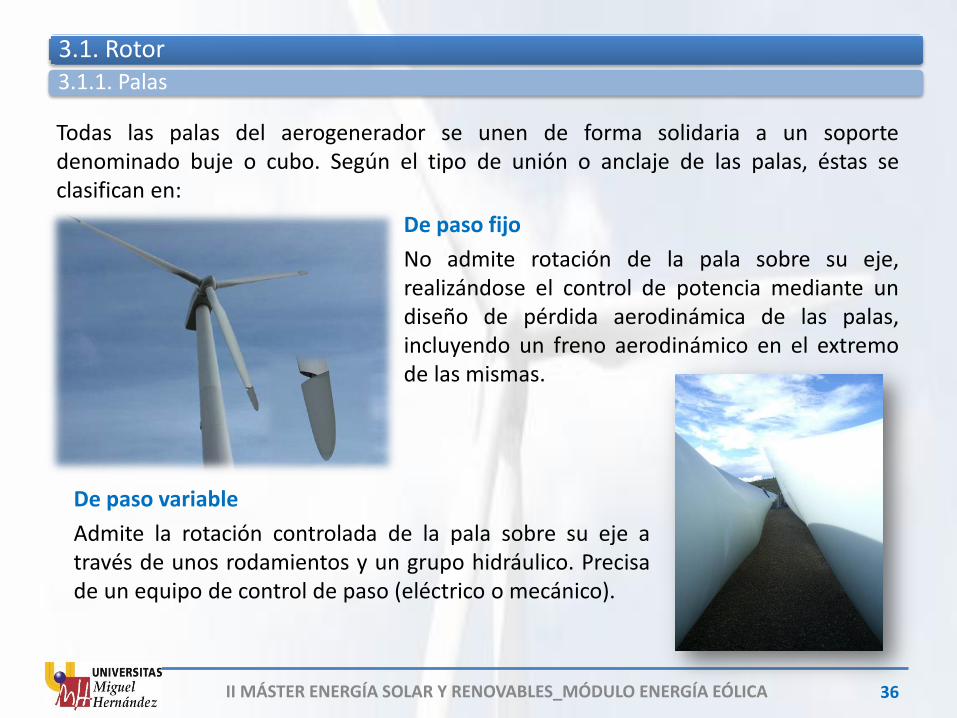
Todas las palas del aerogenerador se unen de forma solidaria a un soporte denominado buje o cubo. Según el tipo de unión o anclaje de las palas, éstas se clasifican en:
De paso fijo
No admite rotación de la pala sobre su eje, realizándose el control de potencia mediante un diseño de pérdida aerodinámica de las palas, incluyendo un freno aerodinámico en el extremo de las mismas.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 36
3.1.1. Palas
De paso variable
Admite la rotación controlada de la pala sobre su eje a través de unos rodamientos y un grupo hidráulico. Precisa de un equipo de control de paso (eléctrico o mecánico).
3.1. Rotor
El buje del rotor es el elemento donde se unen las palas y mediante el cual la potencia captada por el rotor se transmite al eje principal. En función de si el rotor está formado por dos o tres palas pueden presentarse dos tipos de buje:
Rígido (para aerogeneradores de tres palas)
- Estructura metálica hueca que típicamente se construye con base en una fundición de acero nodular.
- Permite un acoplamiento firme de las palas a través de pernos roscados o cuerdas metálicas embebidas en el material de las palas.
- Se incluyen grupos hidráulicos encargados de accionar los frenos aerodinámicos de punta de pala (palas de paso fijo) o los mecanismos de giro de palas (paso variable)
- Se acopla rígidamente con el eje principal del aerogenerador.
Basculante (para aerogeneradores de dos palas)
- Permite un ligero movimiento de las palas en una dirección perpendicular al plano del rotor (permite un desplazamiento angular de 2,5º respecto al plano normal del eje de rotación). Esto ayuda a reducir las cargas dinámicas.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 37
3.1.2. Buje o cubo

3.1. Rotor
La nariz del rotor es una cubierta frontal en forma de cono.
Sirve para desviar el viento hacia el tren motor y mejorar la ventilación en el interior, eliminar turbulencia indeseable en el centro frontal del rotor y mejorar el aspecto estético.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 38
3.1.3. Nariz
3. Partes de un sistema eólico
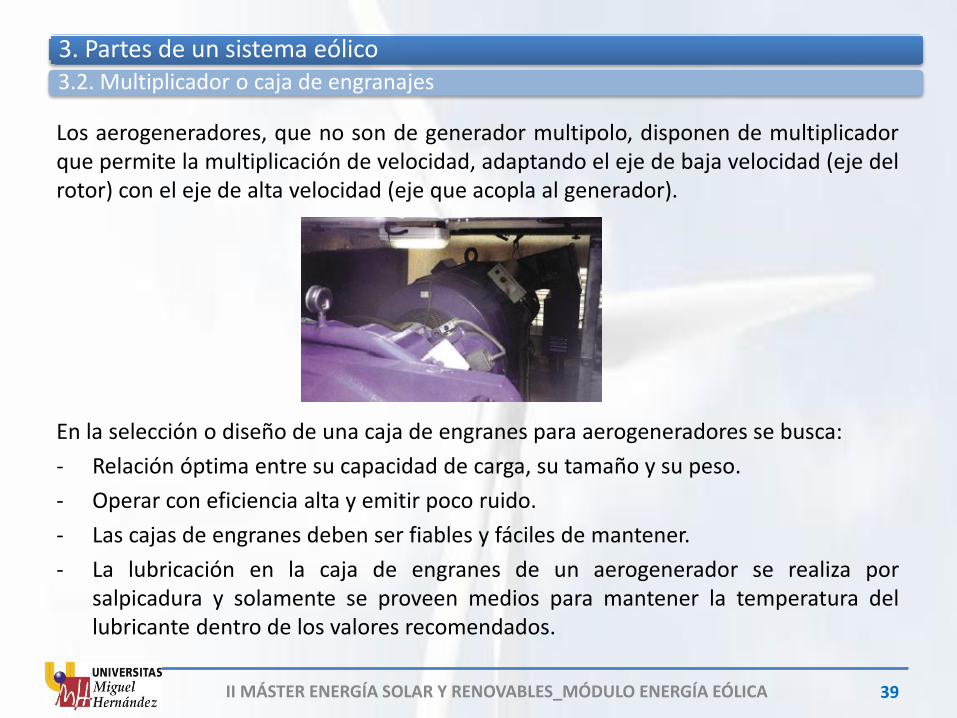
Los aerogeneradores, que no son de generador multipolo, disponen de multiplicador que permite la multiplicación de velocidad, adaptando el eje de baja velocidad (eje del rotor) con el eje de alta velocidad (eje que acopla al generador).
En la selección o diseño de una caja de engranes para aerogeneradores se busca:
- Relación óptima entre su capacidad de carga, su tamaño y su peso.
- Operar con eficiencia alta y emitir poco ruido.
- Las cajas de engranes deben ser fiables y fáciles de mantener.
- La lubricación en la caja de engranes de un aerogenerador se realiza por salpicadura y solamente se proveen medios para mantener la temperatura del lubricante dentro de los valores recomendados.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 39
3.2. Multiplicador o caja de engranajes
3. Partes de un sistema eólico
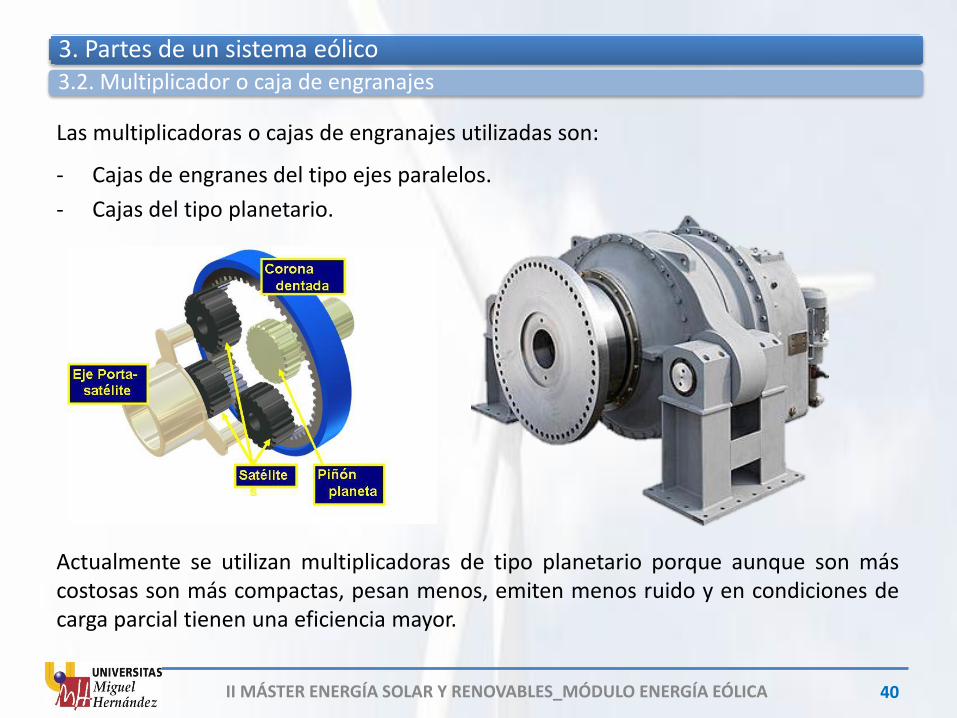
Las multiplicadoras o cajas de engranajes utilizadas son:
- Cajas de engranes del tipo ejes paralelos.
- Cajas del tipo planetario.
Actualmente se utilizan multiplicadoras de tipo planetario porque aunque son más costosas son más compactas, pesan menos, emiten menos ruido y en condiciones de carga parcial tienen una eficiencia mayor.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 40
3.2. Multiplicador o caja de engranajes

3. Partes de un sistema eólico
En el mercado se construye, a parte de generadores eléctricos de velocidad nominal baja, un nuevo diseño en el que ya no es necesaria la caja multiplicadora. En este caso, el rotor se acopla directamente a un generador eléctrico multipolo.
Estos generadores son de fabricación especializada y sus dimensiones son relativamente grandes.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 41
3.2. Multiplicador o caja de engranajes
«En los aerogeneradores con generador multipolo no se dispone de multiplicador o caja de engranajes, por tanto no existe el eje de alta velocidad»

3. Partes de un sistema eólico
El generador eléctrico, también denominado alternador, es una máquina eléctrica encargada de transformar la energía mecánica de rotación (proveniente del eje de alta velocidad del multiplicador, conectado mediante un acoplamiento elástico) en energía eléctrica.
Existen dos tipos de generadores: síncronos y asíncronos.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 42
3.3. Generador eléctrico
Generador eléctrico
Accionamiento directo
Con multiplicador
Síncrono multipolar
Asíncrono
Síncrono convencional
Bobina de excitación
Imanes permanentes
Rotor jaula de ardilla
Rotor bobinado
3. Partes de un sistema eólico
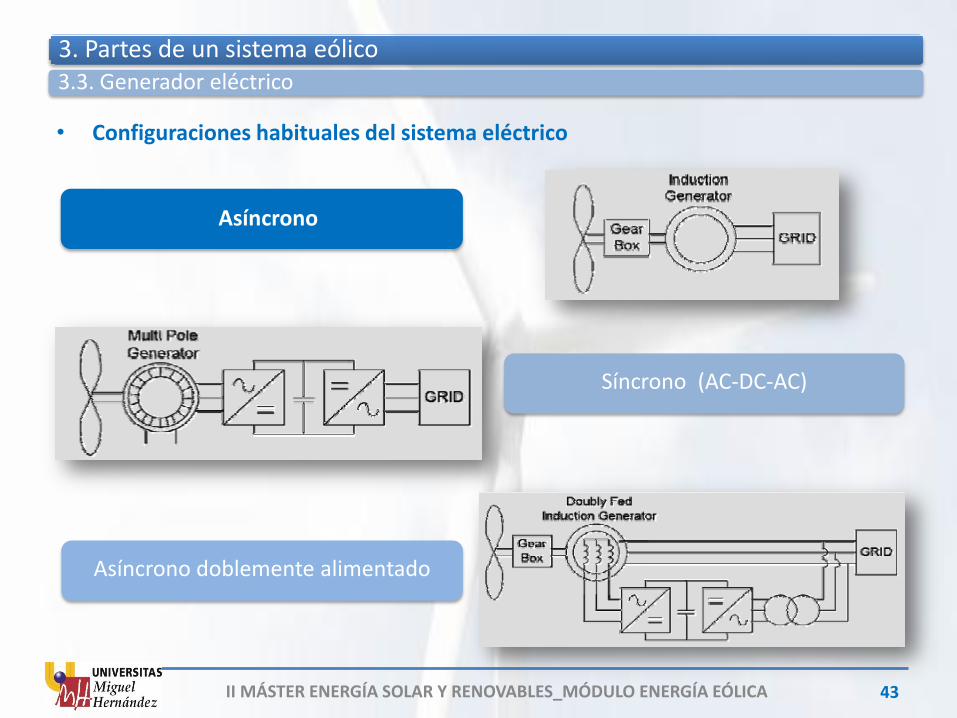
• Configuraciones habituales del sistema eléctrico
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 43
3.3. Generador eléctrico
Síncrono (AC-DC-AC)
Asíncrono
Asíncrono doblemente alimentado

3.3. Generador eléctrico
Los generadores eléctricos más utilizados para la configuración de sistemas eólicos han sido los generadores asíncronos, aunque con la reducción de costes en los sistemas eléctricos que separan la producción de energía de la eólica con la propia red eléctrica están empezando a colocarse en mayor número los síncronos.
Los generadores asíncronos son motores de inducción que se utilizan en forma inversa haciéndolos girar a una velocidad mayor que su velocidad de sincronismo. Cuando a un motor de inducción, conectado a la red eléctrica, se le hace girar por encima de su velocidad de sincronismo, mediante la aplicación de un par motriz en su eje de rotación, la potencia mecánica aplicada se transforma en energía eléctrica.
Fundamentalmente, existen dos tipos de generadores asíncronos que se han utilizado para la integración de aerogeneradores:
- Tipo jaula de ardilla
- Tipo rotor devanado.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 44
3.3.1. Generador asíncrono

3.3. Generador eléctrico
• Jaula de ardilla
- Los del tipo jaula de ardilla son los más utilizados debido a que su costo es bajo.
- Requieren poco mantenimiento, son robustos.
- Se pueden conectar directamente (a través de protecciones y medios de desconexión adecuados) a la línea eléctrica a la que entregarán energía.
• Rotor devanado
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 45
3.3.1. Generador asíncrono
- El generador de inducción de rotor devanado se utiliza con muy poca frecuencia en la integración de aerogeneradores.
- Su principal ventaja es la facilidad de implementar métodos de conexión a línea más sencillos y fiables.

3.3. Generador eléctrico
Para iniciar la operación de los aerogeneradores con generadores asíncronos, se permite que su rotor gire libremente (con el generador eléctrico desconectado de la línea), hasta que el eje del generador eléctrico alcance una velocidad ligeramente mayor que su velocidad de sincronismo. En ese momento, el generador se conecta a la línea y comienza a producir energía eléctrica (de frecuencia igual a la de la línea).
A partir de la velocidad de sincronismo, la magnitud de la potencia eléctrica que se entrega a la red aumenta en función de la ocurrencia de vientos de mayor intensidad. Sin embargo, una vez que se alcanza la potencia nominal es necesario limitar la velocidad del rotor aerodinámico ya que de lo contrario el incremento de la velocidad del viento podría ocasionar que el generador eléctrico operase por arriba de su potencia nominal.
Si se mantuviera durante algunos minutos una condición de sobrecarga de 10% en el generador, se alcanzarían temperaturas que podrían dañar su devanado.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 46
3.3.1. Generador asíncrono

3.3. Generador eléctrico
En todo el intervalo de operación normal de un generador asíncrono conectado a una línea eléctrica, su velocidad de giro se mantiene limitada por la frecuencia de la línea.
Para elevar la potencia de salida de un generador asíncrono desde su valor cero hasta su valor nominal, solo se necesita aumentar la velocidad de giro del rotor en una cantidad menor que 1 r.p.m.
Para el generador tipo jaula de ardilla, su relación par-velocidad, en las cercanías de la velocidad nominal, permite un amortiguamiento de la variación constante del par motriz en el eje principal del aerogenerador. No obstante cuanto más favorable es el deslizamiento, la eficiencia del generador disminuye.
Una desventaja de estos generadores es que requieren tomar potencia reactiva de la línea eléctrica a la cual están conectados, lo cual origina un factor de potencia bajo que debe ser mejorado mediante baterías de condensadores.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 47
3.3.1. Generador asíncrono
«Los aerogeneradores que utilizan generadores asíncronos conectados directamente a la red eléctrica se les conoce como sistemas de velocidad constante»

3.3. Generador eléctrico
Con objeto de incrementar la producción de energía en los aerogeneradores de velocidad constante, en algunos de los primeros modelos se utilizaron dos generadores eléctricos mecánicamente acoplados pero de diferente capacidad y velocidad de sincronismo.
El generador de menor capacidad se utilizaba para velocidades de viento bajas y después se conmutaba al generador de mayor tamaño, el cual estaba dimensionado para la potencia nominal del aerogenerador. Este método fue cambiado por el uso de generadores de polos conmutables debido a que esta opción resultó más fiable que su predecesora.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 48
3.3.1. Generador asíncrono
«Actualmente, cerca del 95 % de los aerogeneradores comerciales son sistemas de velocidad constante con generadores eléctricos asíncronos»
3.3. Generador eléctrico
Los generadores síncronos no son muy apropiados para integrar aerogeneradores de velocidad constante ya que cuando se conectan directamente a la línea eléctrica resultan un sistema demasiado rígido en cuanto a su relación par-velocidad.
Sin embargo en aerogeneradores, la velocidad constante tiene las desventajas:
- Originar cargas dinámicas importantes que exigen su construcción con estructuras robustas.
- Los rotores trabajan a una eficiencia menor que aquella para la que fueron diseñados: a velocidad constante, la relación de la velocidad de punta de pala a la velocidad del viento, varía. Solamente existe un valor de λ para el cual la eficiencia del rotor es máxima.
Estos inconvenientes motivaron el desarrollo de los llamados sistemas de velocidad variable, para los cuales la velocidad de operación no está limitada por la frecuencia de la línea eléctrica.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 49
3.3.2. Generador síncrono
«Si la velocidad de operación no estuviera limitada por la frecuencia de la red extraerían más energía del viento»
3.3. Generador eléctrico
En las máquinas de velocidad variable:
- Los generadores eléctricos no se conectan directamente a la línea eléctrica, para permitir que la velocidad de rotación del rotor siga a la velocidad del viento.
- Las cargas dinámicas se reducen y la eficiencia aumenta.
- Se produce electricidad de frecuencia variable, que hace necesario su conversión a la frecuencia de red para poder transferir la energía producida a una línea eléctrica convencional.
Para la conversión de la frecuencia se utiliza un acondicionador electrónico de potencia que se integra con un rectificador (para convertir la corriente alterna en corriente continua) y un inversor (para convertir la corriente continua en corriente alterna). Esta configuración se conoce como CA-CC-CA.
El incremento de energía generada se estima entre el 10 y el 12%. Sin embargo, las pérdidas en la electrónica lo reducen a ganancias netas entre el 5 y el 8 %.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 50
3.3.2. Generador síncrono

3.3. Generador eléctrico
Generadores asíncronos: un devanado
- No permite ajuste ajuste fino de reactiva.
- Velocidad constante. No permite operación a velocidad del rotor variable.
- Rotor jaula ardilla o bobinado.
- No hay compensación de picos de par.
- Sólo permite una velocidad de giro porque sólo tiene un devanado.
- Utilizado en máquinas antiguas y P < 1MW.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 51
3.3.3. Configuraciones
3.3. Generador eléctrico
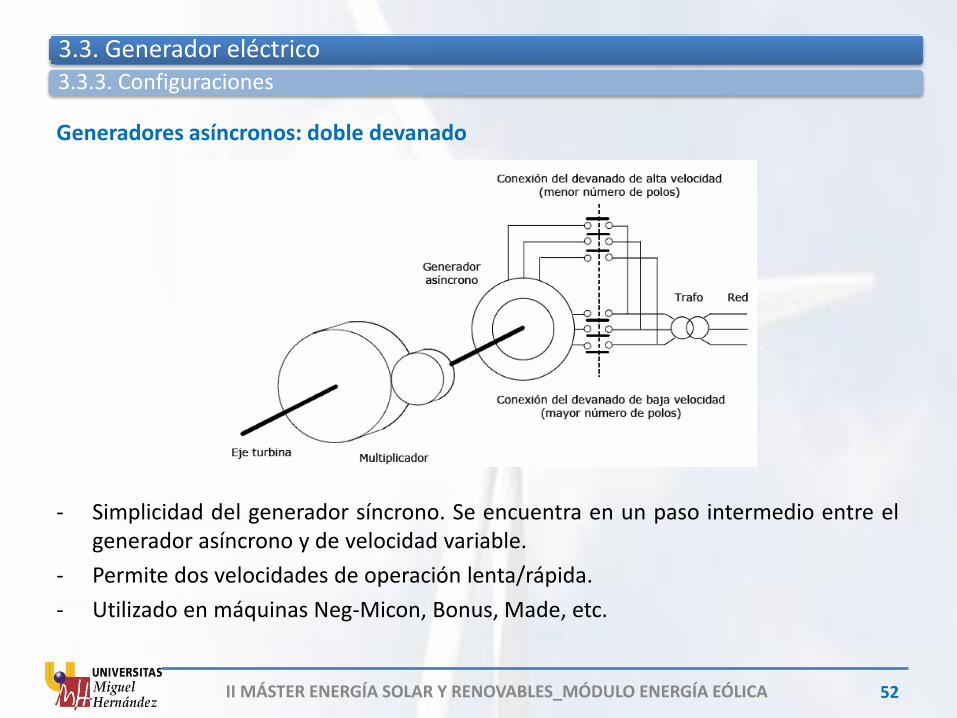
Generadores asíncronos: doble devanado
- Simplicidad del generador síncrono. Se encuentra en un paso intermedio entre el generador asíncrono y de velocidad variable.
- Permite dos velocidades de operación lenta/rápida.
- Utilizado en máquinas Neg-Micon, Bonus, Made, etc.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 52
3.3.3. Configuraciones

3.3. Generador eléctrico
Generadores asíncronos: rotor bobinado
- Introducción resistencias modifica característica par-deslizamiento.
- Permite pequeñas variaciones de la velocidad (hasta 10%).
- Pérdidas por efecto Joule en resistencias eléctricas.
- Utilizado en máquinas VESTAS.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 53
3.3.3. Configuraciones
3.3. Generador eléctrico
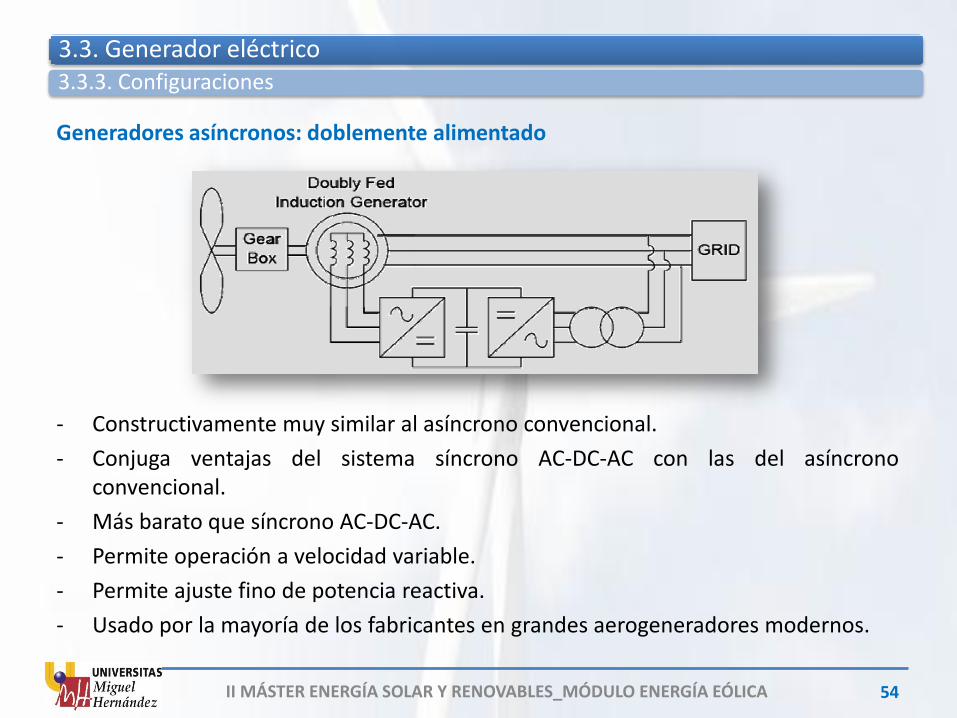
Generadores asíncronos: doblemente alimentado
- Constructivamente muy similar al asíncrono convencional.
- Conjuga ventajas del sistema síncrono AC-DC-AC con las del asíncrono convencional.
- Más barato que síncrono AC-DC-AC.
- Permite operación a velocidad variable.
- Permite ajuste fino de potencia reactiva.
- Usado por la mayoría de los fabricantes en grandes aerogeneradores modernos.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 54
3.3.3. Configuraciones
3.3. Generador eléctrico
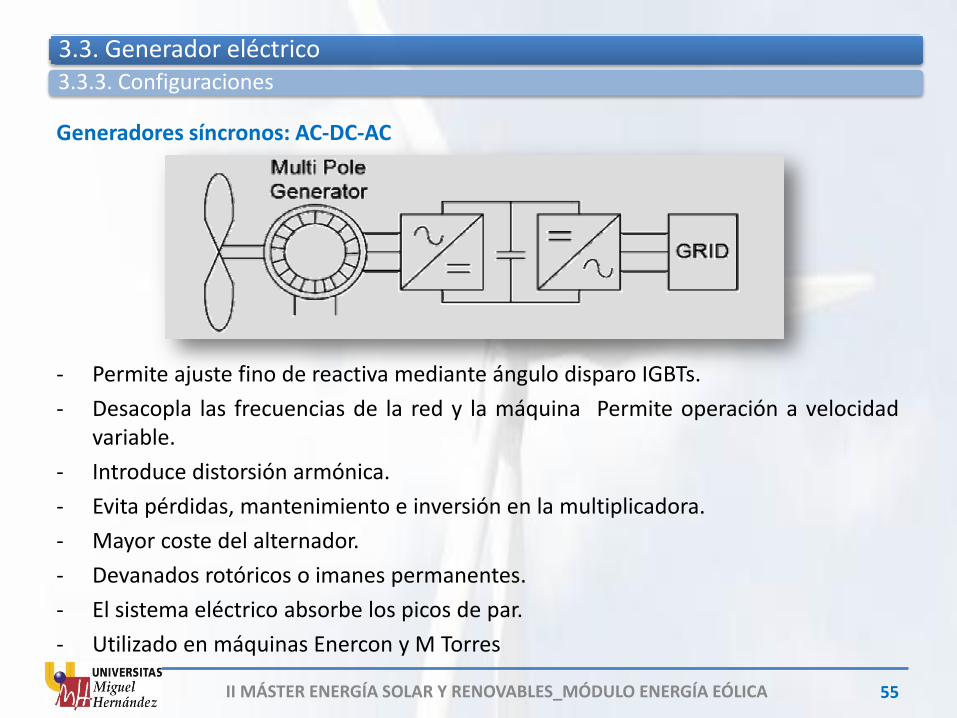
Generadores síncronos: AC-DC-AC
- Permite ajuste fino de reactiva mediante ángulo disparo IGBTs.
- Desacopla las frecuencias de la red y la máquina Permite operación a velocidad variable.
- Introduce distorsión armónica.
- Evita pérdidas, mantenimiento e inversión en la multiplicadora.
- Mayor coste del alternador.
- Devanados rotóricos o imanes permanentes.
- El sistema eléctrico absorbe los picos de par.
- Utilizado en máquinas Enercon y M Torres
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 55
3.3.3. Configuraciones

3.3. Generador eléctrico
Generadores síncronos: AC-DC-AC
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 56
3.3.3. Configuraciones

3. Partes de un sistema eólico
Como ya es conocido, la potencia que proporciona un aerogenerador es proporcional a la velocidad del viento incidente elevada al cubo. En este sentido podría resultar extraño observar una curva típica de potencia de una máquina eólica y comprobar que a partir de un cierto valor de velocidad de viento esta potencia se ve limitada a lo que es conocido como potencia nominal.
En principio esto no tendría mucho sentido dado que a velocidades superiores la capacidad de captar energía podría ser mucho mayor. Ahora bien, el problema hay que plantearlo desde el punto de vista económico. En este sentido, no es conveniente diseñar un aerogenerador que, para las velocidades de viento muy altas, intente extraer el total de la de potencia eólica disponible por:
- Aunque con estas velocidades el aerogenerador (potencialmente) puede generar mayor potencia eléctrica.
- Energéticamente éstas no representan una contribución muy significativa a lo largo del tiempo, debido esencialmente a su baja frecuencia de ocurrencia.
- La excepción puede darse en lugares con regímenes de viento excelentes.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 57
3.4. Sistemas de regulación de potencia y velocidad

3. Partes de un sistema eólico
Desde el punto de vista práctico, la velocidad nominal de diseño de un aerogenerador es función del compromiso entre (ya que todo ello influye en el coste de la energía eléctrica a producir):
- El potencial de generación de electricidad.
- Los costos de fabricación y mantenimiento.
- Las expectativas de resistencia y vida útil.
La regulación de potencia y velocidad en aerogeneradores es relativamente compleja, y ha sido uno de los retos principales en el desarrollo de su tecnología. Actualmente, se utilizan los métodos que se describen a continuación.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 58
3.4. Sistemas de regulación de potencia y velocidad
«Estudios recientes sugieren que el coste más bajo de producción, se puede lograr si se escoge un valor nominal de diseño aproximadamente igual a 1,7
veces la velocidad de viento media anual»

3.4. Sistemas de regulación de potencia y velocidad
El método para el control de la potencia, una vez alcanzado el valor nominal, es el control del ángulo de paso de la pala (α).
El control del ángulo de paso de la pala se define como el ángulo que se forma entre la cuerda del perfil aerodinámico en la punta de la pala y el plano de rotación. Resulta evidente que, para una geometría dada de pala, si mecánicamente se cambia el ángulo α se estará cambiando el ángulo de paso de todos los elementos de pala.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 59
3.4.1. Variación del ángulo de paso de las palas
U
V W
I
3.4. Sistemas de regulación de potencia y velocidad
Si varía el ángulo de paso, el ángulo con el que el viento incide sobre el perfil variará, y, por tanto, también lo harán las fuerzas de resistencia y sustentación, actuando al mismo tiempo sobre la potencia producida.
El cambio de estas fuerzas influye sobre la velocidad angular del rotor, y por lo tanto, la velocidad relativa (W) también cambia, lo que nuevamente modifica tanto al ángulo de ataque como al número de Reynolds, y por consecuencia, esto modifica otra vez el valor de los coeficientes de sustentación y resistencia.
Existen factores adicionales a lo anteriormente expuesto que influyen en la respuesta dinámica del rotor: en la práctica, la velocidad del viento (V) cambia continuamente, además de que en el comportamiento dinámico, las características del rotor pueden ser influidas por el grado de flexión de las palas, por la inercia del rotor, por la respuesta de flujo alrededor de la pala, por la falta de alineación del rotor al viento y por la suciedad que se adhiere a las palas.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 60
3.4.1. Variación del ángulo de paso de las palas
«La contribución de un elemento de pala a la fuerza tangencial en el plano del rotor y a la fuerza axial, es función del ángulo de ataque (i)»

3.4. Sistemas de regulación de potencia y velocidad
Mecánicamente, el manejo del ángulo de paso de las palas de un rotor consiste en hacerlas girar simultáneamente todas sobre su eje radial.
Los mecanismos que actúan sobre la raíz de las palas se encuentran ubicados dentro del cubo del rotor.
La fuerza motriz para realizar el movimiento puede darse a través de mecanismos impulsados por dispositivos hidráulicos o eléctricos:
- Los mecanismos eléctricos suelen ser sistemas individuales montados en la raíz de la pala, los cuales operan en forma sincronizada. Básicamente, este tipo de sistemas está integrado por un motorreductor (en el cubo) acoplado a una corona en la base de la pala.
- Los mecanismos hidráulicos suelen ser centralizados y usualmente se montan sobre el chasis principal. Su operación modifica simultáneamente el paso de todas las palas. Estos sistemas se construyen con base en una unidad hidráulica y un servomotor que mueve linealmente una barra actuadora que pasa a través del interior del eje principal hasta el cubo del rotor.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 61
3.4.1. Variación del ángulo de paso de las palas
3.4. Sistemas de regulación de potencia y velocidad
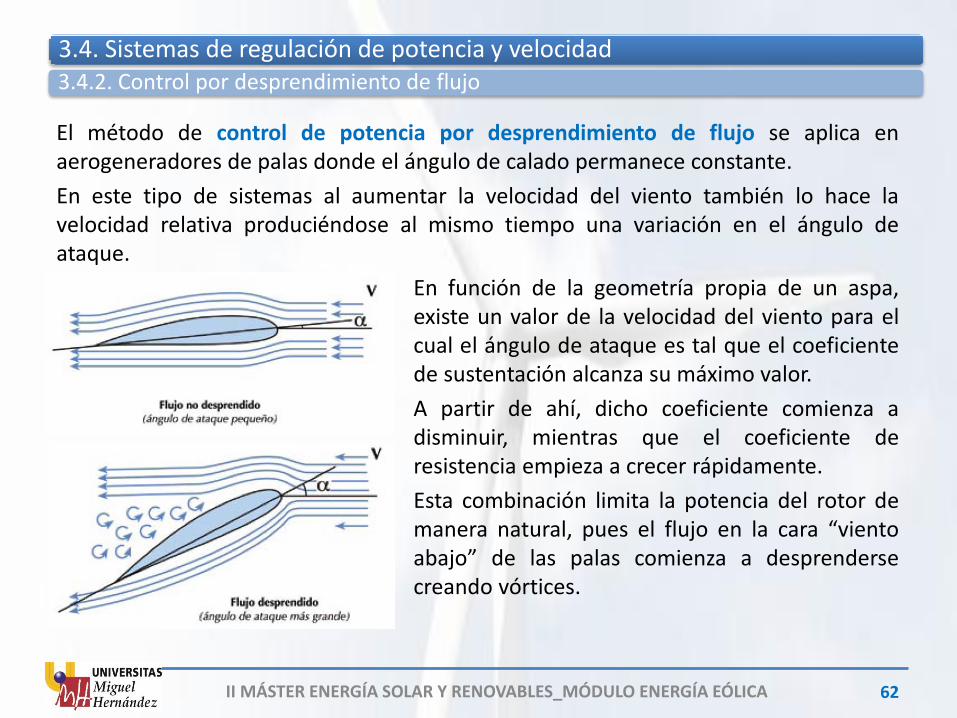
El método de control de potencia por desprendimiento de flujo se aplica en aerogeneradores de palas donde el ángulo de calado permanece constante.
En este tipo de sistemas al aumentar la velocidad del viento también lo hace la velocidad relativa produciéndose al mismo tiempo una variación en el ángulo de ataque.
En función de la geometría propia de un aspa, existe un valor de la velocidad del viento para el cual el ángulo de ataque es tal que el coeficiente de sustentación alcanza su máximo valor.
A partir de ahí, dicho coeficiente comienza a disminuir, mientras que el coeficiente de resistencia empieza a crecer rápidamente.
Esta combinación limita la potencia del rotor de manera natural, pues el flujo en la cara “viento abajo” de las palas comienza a desprenderse creando vórtices.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 62
3.4.2. Control por desprendimiento de flujo

3.4. Sistemas de regulación de potencia y velocidad
El desprendimiento depende de la geometría del perfil aerodinámico y puede ser lento o brusco (el desprendimiento brusco es peligroso y debe evitarse, ya puede llegar a fracturar las palas).
La región de flujo desprendido es mucho más complicada y desconocida que la de flujo no desprendido.
En turbinas eólicas controladas por desprendimiento, el flujo desprendido forma parte de la operación normal hasta para ángulos de ataque de 45º. La teoría y los métodos de cálculo de flujo bidimensional alrededor de perfiles no son confiables para valores del ángulo de ataque mayores a 10º. Junto con estos hechos existe la complicación de que la rotación de la pala añade un aspecto tridimensional muy importante.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 63
3.4.2. Control por desprendimiento de flujo

3.4. Sistemas de regulación de potencia y velocidad
La mayoría de los primeros aerogeneradores, y muchos de los que ahora están en el mercado (sobretodo de baja potencia), utilizan esta técnica debido a que ofrece un menor coste al no requerir de servomecanismos.
Los aerogeneradores que se controlan por desprendimiento de flujo producen menos energía (para un mismo régimen de viento) que aquellos en los que la regulación de potencia se realiza modificando el ángulo de paso de las palas. La diferencia se estima del 3 a 5 %.
La búsqueda de mayor eficiencia, limitando el coste, dio lugar a otra configuración que consiste en el control activo por desprendimiento de flujo: variando el ángulo de paso en sentido negativo con el fin de incrementar el ángulo de ataque y así controlar (en cierta medida) el desprendimiento de flujo. Para ello también se utilizan servomecanismos, pero en este caso, su rango de trabajo es menor y son más baratos.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 64
3.4.2. Control por desprendimiento de flujo
3. Partes de un sistema eólico
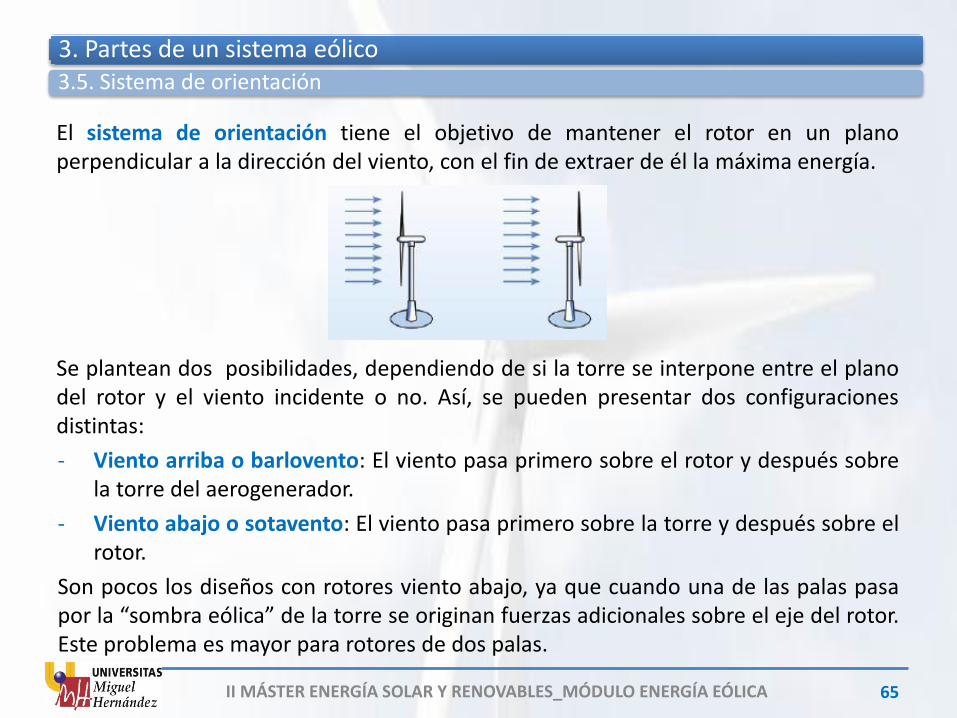
El sistema de orientación tiene el objetivo de mantener el rotor en un plano perpendicular a la dirección del viento, con el fin de extraer de él la máxima energía.
Se plantean dos posibilidades, dependiendo de si la torre se interpone entre el plano del rotor y el viento incidente o no. Así, se pueden presentar dos configuraciones distintas:
- Viento arriba o barlovento: El viento pasa primero sobre el rotor y después sobre la torre del aerogenerador.
- Viento abajo o sotavento: El viento pasa primero sobre la torre y después sobre el rotor.
Son pocos los diseños con rotores viento abajo, ya que cuando una de las palas pasa por la “sombra eólica” de la torre se originan fuerzas adicionales sobre el eje del rotor. Este problema es mayor para rotores de dos palas.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 65
3.5. Sistema de orientación

3. Partes de un sistema eólico
La mayoría de los aerogeneradores en el mercado actual son del tipo a barlovento y utilizan servomecanismos para mantener el plano del rotor en posición perpendicular a la dirección del viento. Estos dispositivos constituyen el elemento unión entre la torre y la góndola del aerogenerador.
Se construyen a partir de un cojinete y una corona dentada de dimensiones considerables. La corona está acoplada a piñones montados sobre dos o más servomotores (eléctricos o hidráulicos).
Normalmente el subsistema se encuentra habilitado, además, con un freno mecánico.
El servomecanismo responde a señales de control que son generadas por el controlador electrónico del aerogenerador, en respuesta a la medición de la dirección del viento. Esto último es llevado a cabo mediante sensores convencionales (veletas).
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 66
3.5. Sistema de orientación

3. Partes de un sistema eólico
Estos sistemas no operan de manera rápida, es decir, no intentan seguir la dirección del viento con gran dinámica. Los sistemas de control cuentan con algoritmos para la toma de decisiones al respecto, y sólo cambian la orientación del rotor cuando las estadísticas de la medición sugieren que la dirección del viento efectivamente ha cambiado. La efectividad de estos algoritmos es relevante con relación a la fiabilidad y eficiencia global del aerogenerador, es decir, una actividad con frecuencia ”alta” degradaría el subsistema y provocaría más fuerzas mientras que una actividad con frecuencia ”baja” tiende a reducir la cantidad de energía eólica aprovechable, debido a la desalineación del rotor.
En aerogeneradores con orientación a sotavento tienen las siguientes características:
- Se emplea una técnica de orientación pasiva, basada en el concepto de conicidad del rotor y en una flexibilidad mayor de las palas.
- Algunos aerogeneradores cuentan con motores para desorientar la máquina con propósitos de seguridad.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 67
3.5. Sistema de orientación
3. Partes de un sistema eólico
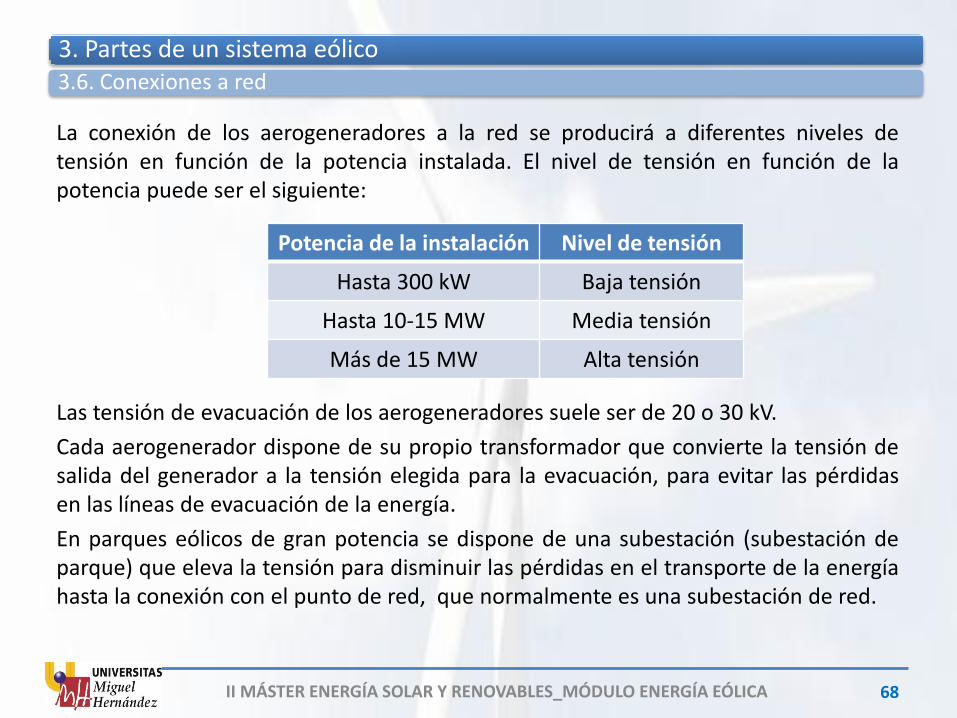
La conexión de los aerogeneradores a la red se producirá a diferentes niveles de tensión en función de la potencia instalada. El nivel de tensión en función de la potencia puede ser el siguiente:
Las tensión de evacuación de los aerogeneradores suele ser de 20 o 30 kV.
Cada aerogenerador dispone de su propio transformador que convierte la tensión de salida del generador a la tensión elegida para la evacuación, para evitar las pérdidas en las líneas de evacuación de la energía.
En parques eólicos de gran potencia se dispone de una subestación (subestación de parque) que eleva la tensión para disminuir las pérdidas en el transporte de la energía hasta la conexión con el punto de red, que normalmente es una subestación de red.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 68
3.6. Conexiones a red
Potencia de la instalación Nivel de tensión
Hasta 300 kW Baja tensión
Hasta 10-15 MW Media tensión
Más de 15 MW Alta tensión

3. Partes de un sistema eólico
El objeto fundamental de los sistemas de seguridad es el de proteger la integridad física de los humanos, así como la del equipo en su conjunto.
Los sistemas de seguridad se ponen en funcionamiento generalmente en alguna de las siguientes situaciones:
- Presencia de vientos mayores que la velocidad de salida.
- Velocidad de rotación por arriba del máximo aceptable.
- Pérdida de carga (desconexión o fallo de la línea de interconexión).
- Exceso de vibraciones.
- Temperaturas por arriba de las máximas aceptables (en generadores, cajas de transmisión, controladores electrónicos, etc.).
- Pérdida de presión en controladores hidráulicos.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 69
3.7. Dispositivos de seguridad

3. Partes de un sistema eólico
Dado que el viento no es controlable, ante una situación operativa anómala la acción típica de seguridad es el paro forzado de los aerogeneradores. Los paros forzados se pueden dar en las siguientes situaciones:
A través del controlador electrónico local
Cuando la situación anómala se detecta por la medición de variables. En este caso, el control ejecuta un paro suavizado (cuando se detectan temperaturas máximas de operación en algún componente).
Por acción directa de elementos específicos
Cuando la situación anómala requiere de una acción inmediata y por el carácter del evento no se puede confiar en el control electrónico (por ejemplo exceso de vibraciones).
Por voluntad de los operadores cuando la situación no puede ser detectada por ningún medio automático (operadores en peligro o accidentados)
Para este caso los aerogeneradores cuentan con botones de paro de emergencia en su parte superior, en su base, y a través de las computadoras en el cuarto de control centralizado.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 70
3.7. Dispositivos de seguridad

3. Partes de un sistema eólico
Los medios que se utilizan para efectuar el paro forzado son:
- Freno de disco.
- Control del ángulo de paso de las palas.
- Dispositivos de punta de pala (frenos aerodinámicos).
- Control de orientación al viento.
La mayoría de los aerogeneradores cuenta con dos (o más) de estos medios, los cuales pueden operar de manera independiente o coordinada. Dependiendo del modelo específico del aerogenerador se asigna uno de ellos como el medio principal de frenado.
Dispositivo aerodinámico Dispositivo mecánico
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 71
3.7. Dispositivos de seguridad

3. Partes de un sistema eólico
Aerogeneradores con sistemas de regulación de velocidad por control del ángulo de paso de las palas
• Freno principal: Se utiliza el sistema de regulación de velocidad por control del ángulo de paso de las palas. El sistema amplía su rango de operación para que sea posible colocar la cuerda del elemento de punta de pala en una posición casi paralela con la dirección del viento (posición de bandera). Esto representa una solución adecuada que evita fuerzas mecánicos durante el evento.
• Freno secundario (típicamente un freno de disco): se aplica después que la velocidad de rotación del rotor se redujo considerablemente, y por consecuencia, el par motriz es mucho menor.
El accionamiento del sistema de regulación por control del ángulo de paso de las palas puede ser:
- Motores eléctricos: para manejar el ángulo de paso de las palas, las condiciones por defecto ante la desconexión o fallo de la línea eléctrica colocan automáticamente a las palas en “posición de bandera”.
- Grupos hidráulicos: el problema de pérdida de carga se resuelve mediante la incorporación de acumuladores hidráulicos.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 72
3.7. Dispositivos de seguridad
3. Partes de un sistema eólico
Aerogeneradores con caja de engranes
El freno de disco se puede aplicar:
• En el eje de alta velocidad (en el eje de salida de la caja de engranes que acopla con el generador eléctrico)
- Si se aplica sobre el eje de alta velocidad, la fuerza requerida para frenar el rotor es inversamente proporcional a la relación de transmisión, por lo cual se pueden utilizar dispositivos más ligeros y baratos.
- La caja de engranes recibe directamente los esfuerzos.
- Resulta más conveniente cuando el medio principal de frenado es a través del control del ángulo de paso de las palas y el freno de disco constituye el medio secundario, por lo que normalmente éste solo se aplica a velocidades ya muy reducidas.
• En el eje principal del rotor (baja velocidad)
- Algunos fabricantes prefieren aplicar el freno de disco sobre el eje de baja velocidad, máxime cuando éste constituye el medio principal de frenado.
- Esta configuración puede resultar más segura, pero también es más costosa.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 73
3.7. Dispositivos de seguridad

3. Partes de un sistema eólico
Todos los aerogeneradores instalados en parques eólicos cuentan con un sistema electrónico dedicado al control y a la adquisición de datos (SCADA).
Cada aerogenerador cuenta con un SCADA propio, independientemente de que éste forme parte de un parque constituido por varias turbinas. Sus funciones principales son:
- Controlar los procesos de inicio de operación y de conexión a la línea eléctrica.
- Controlar la regulación de velocidad y potencia de salida.
- Controlar la orientación del rotor con respecto a la dirección del viento.
- Controlar los procesos de paro forzado.
- Controlar los elementos auxiliares dedicados a mantener las mejores condiciones de operación normal.
- Ser la interfaz local entre el operador y la máquina.
- Adquirir y procesar los datos del comportamiento operacional de cada aerogenerador.
- Mantener la comunicación con los centros de supervisión parques eólicos (transmisión de datos).
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 74
3.8. Electrónica de control
3. Partes de un sistema eólico
Los SCADA miden y procesan las variables de control, entre las que se encuentran:
Cada SCADA está diseñado en forma específica para el modelo de aerogenerador al que se aplica, es decir, cada sistema cuenta con sus propios algoritmos y secuencias lógicas.
Los SCADA tienen características comunes, pero pueden llegar a ser muy diferentes de una marca de aerogenerador a otra.
La fiabilidad y efectividad de los SCADA tiene un impacto muy relevante en cuanto a la eficiencia, fiabilidad y disponibilidad de un aerogenerador. Es decir, no puede existir un buen aerogenerador si su sistema de control es deficiente.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 75
3.8. Electrónica de control
- Velocidad y dirección del viento. - Vibraciones.
- Velocidades angulares. - Estados operativos.
- Temperaturas. - Parámetros eléctricos.
- Presión. - Eventos.
- Ángulo de orientación.

3. Partes de un sistema eólico
El chasis principal (góndola o nacelle) es una estructura metálica donde se monta el tren de potencia, el generador eléctrico, las mordazas del freno y, en su caso, las unidades hidráulicas. También puede ir montado el transformador, que suele tener la función de contrapeso del rotor.
Este componente recibe las cargas del rotor a través del tren de potencia y las transmite a la torre vía el subsistema de orientación.
Usualmente, el chasis principal está construido a partir de perfiles estructurales de acero soldados y placas de fibra de vidrio. Este elemento es el principal receptor de las fuerzas generados durante el frenado, ya que sobre él se montan los elementos de fricción que actúan sobre el disco del freno (las mordazas).
- Su dimensión y peso depende de las cargas que debe soportar.
- Su diseño parte de la fuerza general relacionado con la reducción de masa y volumen del conjunto.
- Sobre este chasis va colocada una cubierta general cuyo propósito es proteger a los componentes del sistema contra los efectos del medio ambiente.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 76
3.9. Estructura soporte o chasis

3. Partes de un sistema eólico
Las torres constituyen el elemento de apoyo del resto de subsistemas de la turbina.
- Su principal función es estructural. - Puede ser una estructura tubular o una estructura en celosía de perfiles
laminados. - La forma externa suele ser tronco-cónica o una aproximación de diseño económico
similar a ésta. - Los componentes de la torre se protegen de la corrosión mediante galvanizado en
caliente, y se van realizando amarres entre ellos de forma frecuente. - Se suelen construir en acero si bien para grandes potencias se está empleando el
hormigón prefabricado.
Las primeras máquinas diseñadas para producir energía eléctrica utilizaban torres con estructuras metálicas o configuración en celosía. Posteriormente con el aumento del tamaño y la potencia la tecnología ha evolucionado hacia torres tubulares de acero y más recientemente de hormigón para grandes potencias.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 77
3.10. Torres

3.10. Torres
Las torres de celosía se caracterizan:
- Estructura metálica de celosía formada por perfiles metálicos que soporta tanto la nacelle como al rotor.
- Necesidad de verificar periódicamente que en las uniones de todos los perfiles angulares los tornillos se mantengan apretados adecuadamente y graneteados.
- Su rigidez limita su capacidad para absorber fluctuaciones de carga. Este tipo de torres no se utiliza en sistemas grandes.
- En estas torres, tienen una accesibilidad compleja debido a que el acceso a la nacelle se realiza por medio de escaleras tipo marino, montadas sobre un costado, dificultando los trabajos de mantenimiento.
- En comparación con las estructuras tubulares, tienen un costo relativamente bajo. Sin embargo, requieren mucho mantenimiento.
- Fáciles de construir ya que típicamente están formadas por perfiles angulares de acero, y fáciles de transportar, prácticamente en cualquier tamaño.
- Requieren de un medio adicional para la instalación del equipo electrónico de piso.
- Reduce el impacto visual a grandes distancia, mientras que se aumenta a distancias cercanas.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 78
3.10.1. Torres de celosía

3.10. Torres
Torres tubulares
- Suelen ser de acero o hormigón.
- Sección circular y, dependiendo del tamaño, se pueden presentar con forma cilíndrica, troncocónica o una mezcla de ambas.
- Proporcionan el medio de protección e instalación para equipos de control y sistemas eléctricos en piso.
- Al mismo tiempo, se pueden integrar en ella medios muy seguros para que el personal de mantenimiento suba a la góndola (escalera manual o elevador).
- Su instalación es fácil y rápida al tiempo que requieren poco mantenimiento. Se suelen construir en dos, tres o cuatro tramos dependiendo de la altura a alcanzar y la unión entre tramos se realiza mediante pernos.
- Costo relativamente alto, su fabricación requiere maquinaria especializada, y su transporte es más difícil y costoso.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 79
3.10.2. Torres tubulares
4. Curvas características de un aerogenerador
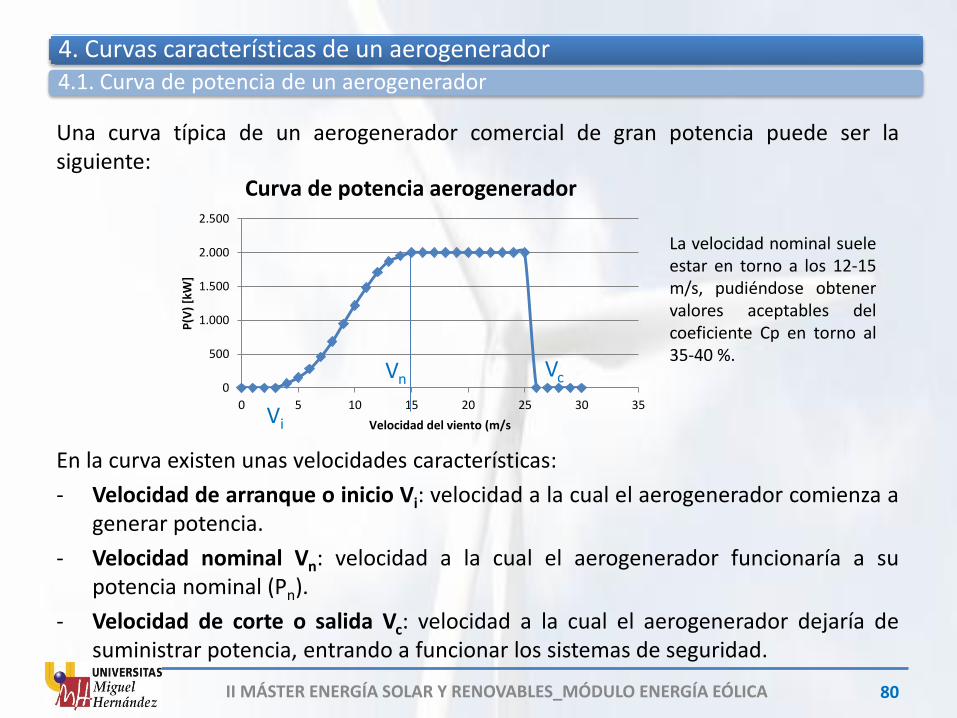
Una curva típica de un aerogenerador comercial de gran potencia puede ser la siguiente:
En la curva existen unas velocidades características:
- Velocidad de arranque o inicio Vi: velocidad a la cual el aerogenerador comienza a generar potencia.
- Velocidad nominal Vn: velocidad a la cual el aerogenerador funcionaría a su potencia nominal (Pn).
- Velocidad de corte o salida Vc: velocidad a la cual el aerogenerador dejaría de suministrar potencia, entrando a funcionar los sistemas de seguridad.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 80
4.1. Curva de potencia de un aerogenerador
0
500
1.000
1.500
2.000
2.500
0 5 10 15 20 25 30 35
P(V
) [k
W]
Velocidad del viento (m/s
Curva de potencia aerogenerador
Vi
Vn Vc
La velocidad nominal suele estar en torno a los 12-15 m/s, pudiéndose obtener valores aceptables del coeficiente Cp en torno al 35-40 %.
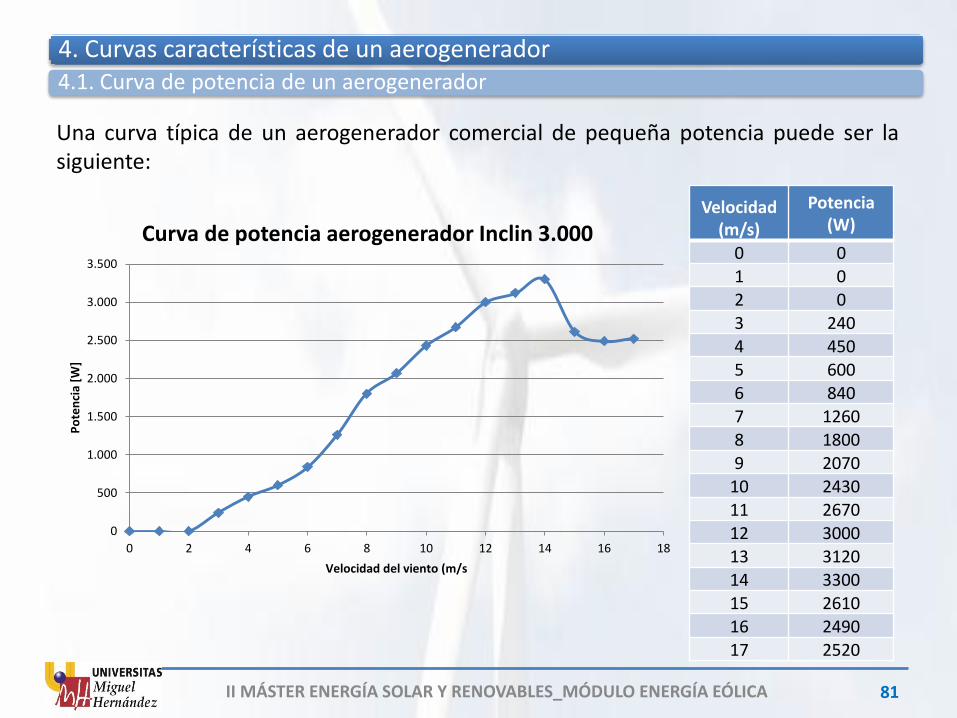
4. Curvas características de un aerogenerador
Una curva típica de un aerogenerador comercial de pequeña potencia puede ser la siguiente:
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 81
4.1. Curva de potencia de un aerogenerador
0
500
1.000
1.500
2.000
2.500
3.000
3.500
0 2 4 6 8 10 12 14 16 18
Po
ten
cia
[W]
Velocidad del viento (m/s
Curva de potencia aerogenerador Inclin 3.000 Velocidad
(m/s)
Potencia (W)
0 0
1 0
2 0
3 240
4 450
5 600
6 840
7 1260
8 1800
9 2070
10 2430
11 2670
12 3000
13 3120
14 3300
15 2610
16 2490
17 2520

4. Curvas características de un aerogenerador
De forma análoga a la que se ha obtenido el coeficiente de potencia Cp, se puede obtener el coeficiente de empuje, sin más que desarrollar las expresiones matemáticas de la teoría de Betz.
El teorema de Euler nos proporciona la fuerza ejercida por el motor eólico sobre el aire en movimiento, su valor absoluto será:
Conocemos la relación:
Por tanto,
Si utilizamos la relación a=V2/V1 la expresión de la fuerza obtenida será
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 82
4.2. Coeficiente de empuje
𝐹𝑟 = 𝜌𝑄(𝑉1 − 𝑉2) = 𝜌𝑆𝑉(𝑉1 − 𝑉2)
𝑉 = (𝑉1+𝑉2)
2
𝐹𝑟 = 𝜌𝑄(𝑉1 − 𝑉2) = 1
2𝜌𝑆 𝑉1 + 𝑉2 (𝑉1 − 𝑉2) =
1
2𝜌𝑆 𝑉1
2 − 𝑉22
𝐹𝑟 =1
2𝜌𝑆𝑉1
2 1 − 𝑎2

4. Curvas características de un aerogenerador
El coeficiente de empuje se define como el cociente entre el empuje real que se ejerce sobre el rotor y el empuje total disponible del viento (a=0):
Destacar que la fuerza de empuje del viento es función del cuadrado de la velocidad, a diferencia de la potencia que es función del cubo de la velocidad del viento.
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 83
4.2. Coeficiente de empuje
𝐶𝑇 =𝑒𝑚𝑝𝑢𝑗𝑒 𝑟𝑒𝑎𝑙
𝑒𝑚𝑝𝑢𝑗𝑒 𝑑𝑖𝑠𝑝𝑜𝑛𝑖𝑏𝑙𝑒
𝐶𝑇 = 1 − 𝑎2
0
0,2
0,4
0,6
0,8
1
1,2
0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1
CT
a
Coeficiente de empuje

4. Curvas características de un aerogenerador
El coeficiente de empuje de un aerogenerador comercial, como puede ser el TWT-1.65 del fabricante de aerogeneradores MTorres, variará en función del diámetro del rotor:
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 84
4.2. Coeficiente de empuje
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1
0 5 10 15 20 25
CT
Velocidad del viento (m/s)
Coeficiente de empuje TWT-1.6
Diámetro rotor 77 m
Diámetro rotor 82 m
Diámetro rotor 90 m

5. Elección del aerogenerador
Dentro de toda la gama de posibilidades que ofrece el mercado para la selección del aerogenerador, la decisión última dependerá de los siguientes factores:
- Condicionantes de logística de accesos, dado que en algunos emplazamientos no se puede llegar con los medios de transporte actuales, o bien el coste puede ser limitativo.
- Condicionantes de tipo legal y técnico, principalmente medioambientales y energéticos.
- Condicionantes de viento, velocidad media, distribución de la velocidad, turbulencia, frecuencia e intensidad de las ráfagas, etc.
- Condicionantes de tipo económico, precio de los aerogeneradores, coste del transporte y la instalación.
La elección se centra entre aerogeneradores de potencia nominal media (660-900 KW) y aerogeneradores de potencia nominal alta (1.300-2.000 KW).
II MÁSTER ENERGÍA SOLAR Y RENOVABLES_MÓDULO ENERGÍA EÓLICA 85

II Máster Energía Solar y Renovables
GRACIAS POR SU ATENCIÓN