
INFORME DE TOPOGRAFÍA CI3502-3 Informe N ° 1 … · UNIVERSIDAD DE CHILE Facultad de Ciencias...
10
UNIVERSIDAD DE CHILE Facultad de Ciencias Físicas y Matemáticas Departamento de Ingeniería Civil INFORME DE TOPOGRAFÍA CI3502-3 Informe N ° 1 Geometría del Nivel de Ingeniero y Taquímetro Nombre: José Villanueva Riffo Grupo: 7 Sección: 3 Profesor: Iván Bejarano B. Ayudante: Magdalena Prado Fecha realización: 16-abril Fecha de entrega: 23- abril
Transcript of INFORME DE TOPOGRAFÍA CI3502-3 Informe N ° 1 … · UNIVERSIDAD DE CHILE Facultad de Ciencias...

UNIVERSIDAD DE CHILE
Facultad de Ciencias Físicas y Matemáticas
Departamento de Ingeniería Civil
INFORME DE TOPOGRAFÍA
CI3502-3
Informe N ° 1
Geometría del Nivel de Ingeniero y Taquímetro
Nombre: José Villanueva Riffo
Grupo: 7
Sección: 3
Profesor: Iván Bejarano B.
Ayudante: Magdalena Prado
Fecha realización: 16-abril
Fecha de entrega: 23- abril
Introducción
El objetivo del presente informe, es dar a conocer los distintos errores medidos en la
jornada de práctica. Las mediciones se realizaron en la Plaza Ercilla, entre calle tupper y la
facultad de Ingeniería de la universidad de Chile.
Figura 1: Croquis del terreno
Para realizar las mediciones se utilizaron los siguientes instrumentos (con sus respectivos
códigos):
-Nivel de ingeniero (NAK1 – 344154)
-Taquímetro (T – 6093)
-Trípode (T – 12)
-Mira 1 (MT – 07)
-Mira 2 (Sin código)
-Huincha 30m (Sin código)
-Niveletas (Sin código)
El terreno donde se realizaron las mediciones, era de tierra y pasto. El trípode se podía por
lo tanto fijar al suelo. No existían desniveles visibles a simple vista ni condiciones
climáticas que pudiesen alterar las mediciones.
Las fórmulas utilizadas para calcular los distintos errores se listan a continuación:
Con el Nivel de Ingeniero se llevaron a cabo mediciones para determinar el error de
paralelismo entre el Eje de Colimación y la Línea de Fe, para esto se utilizaron los métodos
del punto medio y de las estaciones conjugadas (fórmulas I y II respectivamente).
Y con el Taquímetro se llevaron a cabo mediciones para determinar dos errores:
-Para determinar el error de perpendicularidad entre el Eje vertical de Rotación y el Eje
Horizontal de Rotación, se utilizó el método del punto alto (fórmula III).
-Para determinar el error de perpendicularidad entre el Eje de Colimación y el Eje
Horizontal de Rotación se utilizaron los métodos del doble tránsito y el de los tres puntos
alineados (fórmulas IV y V respectivamente).
Cálculos Nivel de Ingeniero
-Determinación del error de paralelismo de EC y LF
Para determinar este error, se utilizó el método del punto medio y el método de las
estaciones conjugadas, ambas en el Nivel de Ingeniero.
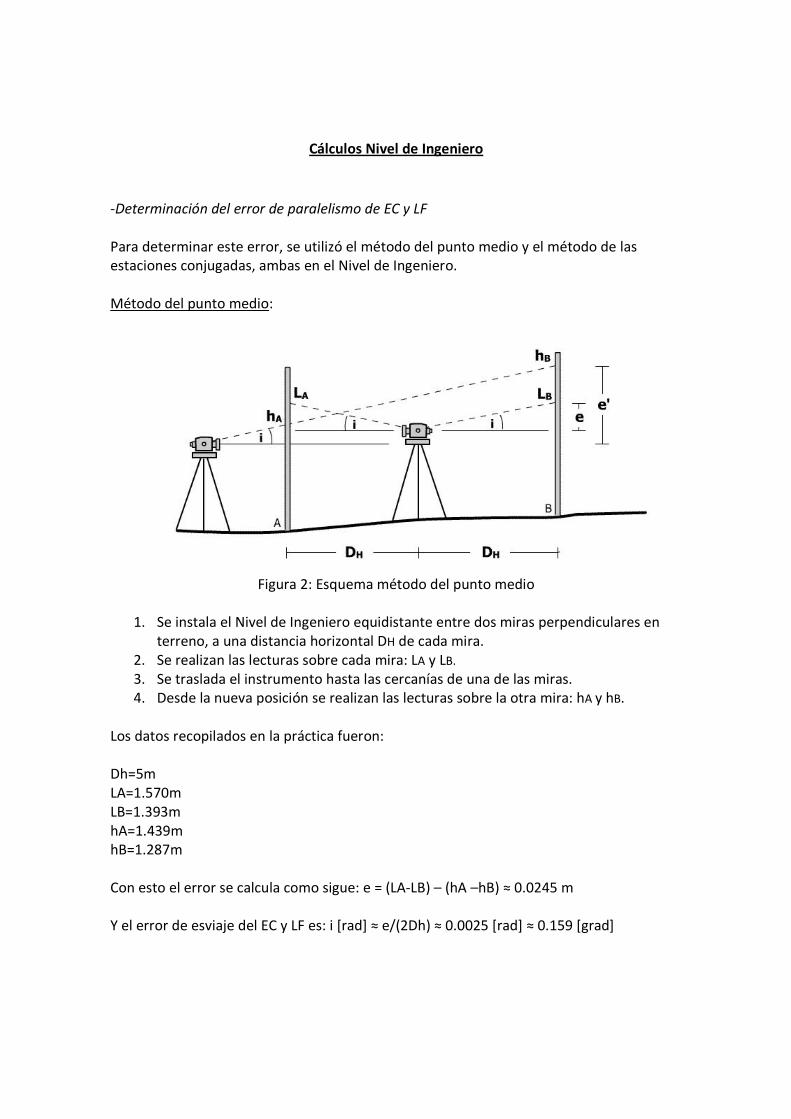
Método del punto medio:
Figura 2: Esquema método del punto medio
1. Se instala el Nivel de Ingeniero equidistante entre dos miras perpendiculares en
terreno, a una distancia horizontal DH de cada mira.
2. Se realizan las lecturas sobre cada mira: LA y LB.
3. Se traslada el instrumento hasta las cercanías de una de las miras.
4. Desde la nueva posición se realizan las lecturas sobre la otra mira: hA y hB.
Los datos recopilados en la práctica fueron:
Dh=5m
LA=1.570m
LB=1.393m
hA=1.439m
hB=1.287m
Con esto el error se calcula como sigue: e = (LA-LB) – (hA –hB) ≈ 0.0245 m
Y el error de esviaje del EC y LF es: i [rad] ≈ e/(2Dh) ≈ 0.0025 [rad] ≈ 0.159 [grad]
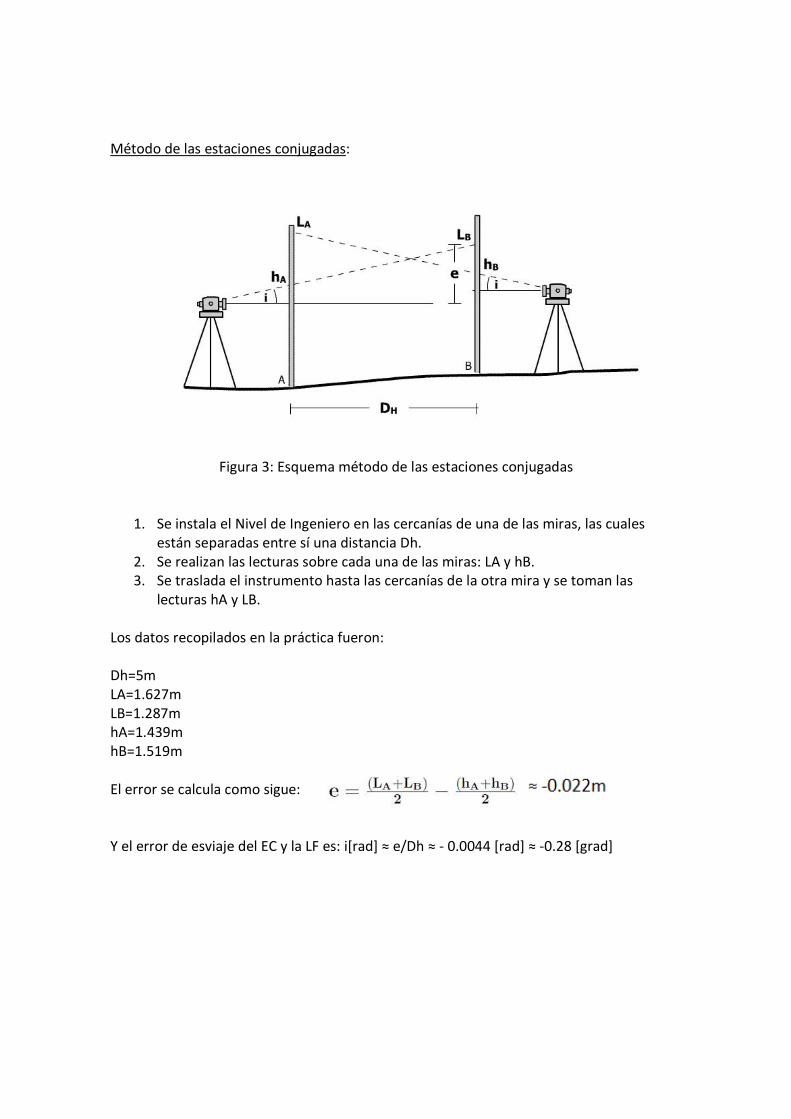
Método de las estaciones conjugadas:
Figura 3: Esquema método de las estaciones conjugadas
1. Se instala el Nivel de Ingeniero en las cercanías de una de las miras, las cuales
están separadas entre sí una distancia Dh.
2. Se realizan las lecturas sobre cada una de las miras: LA y hB.
3. Se traslada el instrumento hasta las cercanías de la otra mira y se toman las
lecturas hA y LB.
Los datos recopilados en la práctica fueron:
Dh=5m
LA=1.627m
LB=1.287m
hA=1.439m
hB=1.519m
El error se calcula como sigue:
Y el error de esviaje del EC y la LF es: i[rad] ≈ e/Dh ≈ - 0.0044 [rad] ≈ -0.28 [grad]
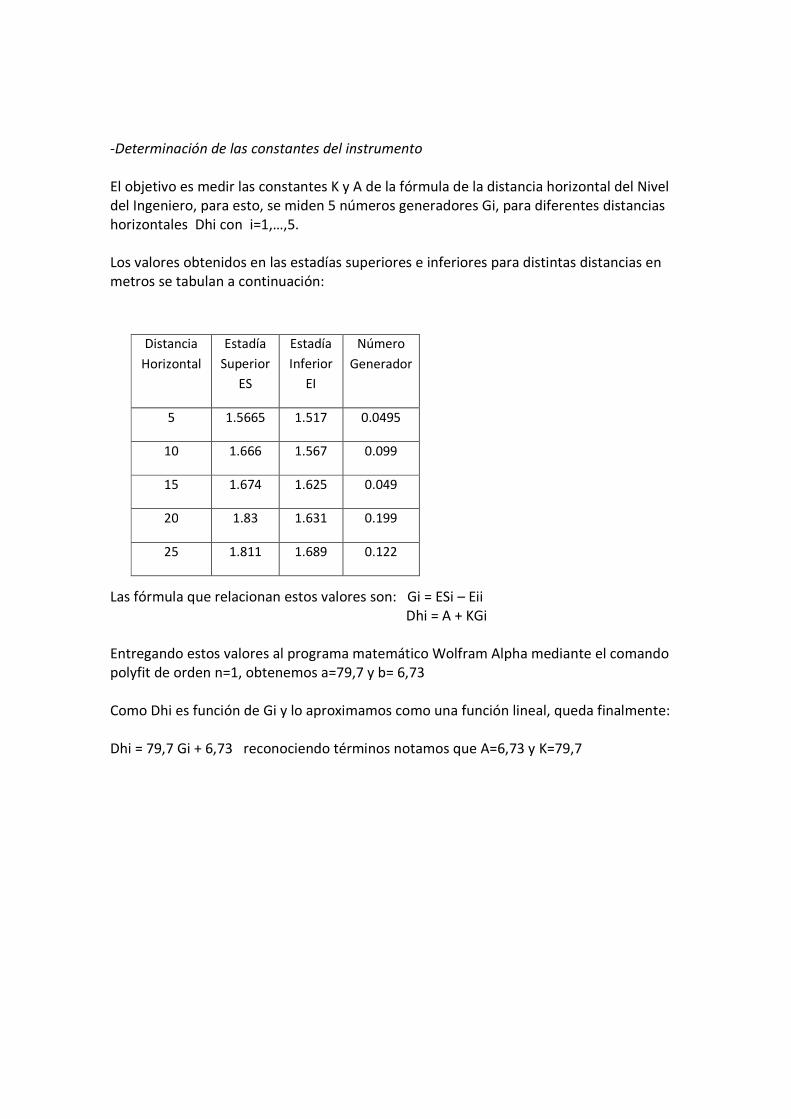
-Determinación de las constantes del instrumento
El objetivo es medir las constantes K y A de la fórmula de la distancia horizontal del Nivel
del Ingeniero, para esto, se miden 5 números generadores Gi, para diferentes distancias
horizontales Dhi con i=1,…,5.
Los valores obtenidos en las estadías superiores e inferiores para distintas distancias en
metros se tabulan a continuación:
Las fórmula que relacionan estos valores son: Gi = ESi – Eii
Dhi = A + KGi
Entregando estos valores al programa matemático Wolfram Alpha mediante el comando
polyfit de orden n=1, obtenemos a=79,7 y b= 6,73
Como Dhi es función de Gi y lo aproximamos como una función lineal, queda finalmente:
Dhi = 79,7 Gi + 6,73 reconociendo términos notamos que A=6,73 y K=79,7
Distancia
Horizontal
Estadía
Superior
ES
Estadía
Inferior
EI
Número
Generador
5 1.5665 1.517 0.0495
10 1.666 1.567 0.099
15 1.674 1.625 0.049
20 1.83 1.631 0.199
25 1.811 1.689 0.122
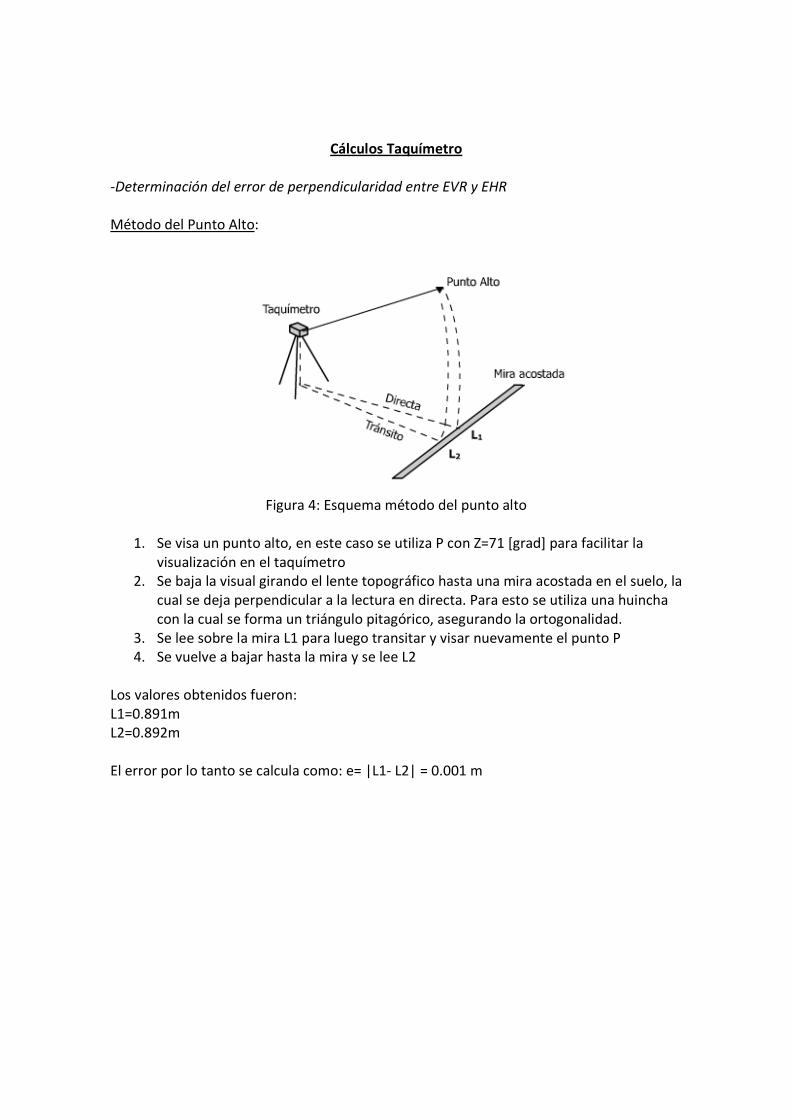
Cálculos Taquímetro
-Determinación del error de perpendicularidad entre EVR y EHR
Método del Punto Alto:
Figura 4: Esquema método del punto alto
1. Se visa un punto alto, en este caso se utiliza P con Z=71 [grad] para facilitar la
visualización en el taquímetro
2. Se baja la visual girando el lente topográfico hasta una mira acostada en el suelo, la
cual se deja perpendicular a la lectura en directa. Para esto se utiliza una huincha
con la cual se forma un triángulo pitagórico, asegurando la ortogonalidad.
3. Se lee sobre la mira L1 para luego transitar y visar nuevamente el punto P
4. Se vuelve a bajar hasta la mira y se lee L2
Los valores obtenidos fueron:
L1=0.891m
L2=0.892m
El error por lo tanto se calcula como: e= |L1- L2| = 0.001 m

-Determinación del error de perpendicularidad entre EC y EHR
Método del doble tránsito:
Figura 5: Esquema método del doble tránsito
1. Se alinean 3 puntos A,B,C en una recta instalándose el taquímetro en el punto B
2. Se visa el punto A para luego girar el anteojo y leer sobre la mira acostada en L1
3. Se rota hacia el punto original A
4. Se gira el anteojo y se lee nuevamente sobre la mira en L2
Los datos obtenidos son fueron:
L1=0.1335m
L2=0.1334m
Luego el error estará dado por: e= (L1-L2)/4 = 0.000025m
Método de los tres puntos alineados:
Figura 6: Esquema método de los tres puntos alineados

1. Se deben alinear tres puntos A,B,C sobre una recta
2. Se instala el instrumento en B y se lee L1 sobre una mira acostada en C, la cual
estará dispuesta de manera ortogonal a la línea ABC. Para esto nuevamente se
utiliza el triángulo de Pitágoras con la huincha.
3. Con la visual apuntando hacia A se gira el anteojo y se obtiene una nueva lectura
L2
Los datos obtenidos en la práctica fueron:
L1=0.1334m
L2=0.1285m
Con esto el error se calcula como: e= (L1-L2)/2= 0.0049m
Lecturas en el Limbo:
1. Se visa un punto inamovible, en este caso ocuparemos Z= 71.39 grad para hacer
más fácil la lectura en el instrumento
2. Se leen los ángulos horizontales y verticales en directa (Hd y Vd respectivamente)
3. Se transita visando al mismo punto y se leen los ángulos horizontales y verticales
en tránsito (Ht y Vt respectivamente)
Los valores obtenidos fueron:
Hd=191.2grad
Vd=71.39grad
Ht=391.25grad
Vt=328.56grad
Con esto calculamos los siguientes errores:
Error de calaje= ec =
Error de índice= ei =

Análisis de Errores y Conclusiones
A lo largo del desarrollo de la práctica, hubo errores de tipo sistemático y
aleatorio.
Claramente algunos de los errores sistemáticos fueron los calculados, pues el
instrumento no estaba perfectamente calibrado. La falta de perpendicularidad
entre el eje de colimación y el eje horizontal de rotación por ejemplo, conlleva
errores en las mediciones después de transitar.
Los otros errores sistemáticos, tienen que ver con problemas particulares de la
mira, la falta de exactitud de una de éstas y de una niveleta.
Los errores de tipo aleatorios no son posibles de analizar con pocas mediciones, y
corresponden a aquellos que no podemos controlar durante la práctica misma.
Es importante notar que gracias al análisis de los errores, existe la posibilidad de
llegar a calibrar un instrumento. Por lo que reporta una gran utilidad en el ámbito
práctico
Además se pueden “diferenciar” errores, en el sentido de que hay errores que son
mucho más evitables que otros, y por lo tanto, menos perjudiciales si se sabe lidiar
con ellos. Este último punto se hace claro en los errores asociados a la falta de
perpendicularidad entre EC y EHR. Por ejemplo, el error de índice en una
repetición es “peor” que el error de calaje, puesto que el “0 grad” del limbo
horizontal se puede setear a cero cuando sea necesario, no así en el limbo vertical,
donde el “0 grad” es fijo.


















