Informe_Manipulador (1)
8
Robótica REPRESENTACION ESPACIAL DE UN MANIPULADOR Resumen— En este informe se resume el proceso para la representacion especial de un manipulador mediante la posicion, orientacion y matrices de transformacion homogeneas se procedio a realizer el analisis de los grados de libertad del robot de laboratorioy los diferentes movimientos que puede tener el mismomediante la observacion de planos en 2 y 3 dimensiones. Palabras Claves – Brazo, eslabon, articulacion, efector final, actuador, grado de libertad. I. INTRODUCCION En muchos casos, las personas que realizan un Proyecto de robotica del tipo manipulador, se ocupan de aprender a manipular los componentes físicos que constituyen un robot. Maquinar la estructura mecanica programar el dispositivo de control, conectar la etapa de potencia y utilizer un dispositivo que traduzca las instrucciones de un operador o usuario al robot. Figura 1. Representación de los ejes De esta forma es relativamente sencillo construir un brazo robot. Para el caso donde el operario del robot es el encargado de posicionar y orientar la herramienta o por efecto final no es necesario calculos ni un minimo de conocimiento de las variables fisicas involucradas en dicho movimiento. Sin embargo cuando la posicion y orientacion del efector es llevado a cabo por una computadora o un dispositivo de mando, es necesario tener nociones de la representacion matematica de la posicion y orientacion de 1
-
Upload
johanna-inachonta -
Category
Documents
-
view
214 -
download
0
description
manipulador
Transcript of Informe_Manipulador (1)
REPRESENTACION ESPACIAL DE UN MANIPULADOR
Robtica
6
Resumen En este informe se resume el proceso para la representacion especial de un manipulador mediante la posicion, orientacion y matrices de transformacion homogeneas se procedio a realizer el analisis de los grados de libertad del robot de laboratorioy los diferentes movimientos que puede tener el mismomediante la observacion de planos en 2 y 3 dimensiones.Palabras Claves Brazo, eslabon, articulacion, efector final, actuador, grado de libertad.INTRODUCCIONEn muchos casos, las personas que realizan un Proyecto de robotica del tipo manipulador, se ocupan de aprender a manipular los componentes fsicos que constituyen un robot. Maquinar la estructura mecanica programar el dispositivo de control, conectar la etapa de potencia y utilizer un dispositivo que traduzca las instrucciones de un operador o usuario al robot.
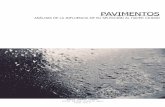
Figura 1. Representacin de los ejesDe esta forma es relativamente sencillo construir un brazo robot.Para el caso donde el operario del robot es el encargado de posicionar y orientar la herramienta o por efecto final no es necesario calculos ni un minimo de conocimiento de las variables fisicas involucradas en dicho movimiento. Sin embargo cuando la posicion y orientacion del efector es llevado a cabo por una computadora o un dispositivo de mando, es necesario tener nociones de la representacion matematica de la posicion y orientacion de un eje de referencia con respect al otro.
Figura 2. Movimiento en varios ejes
marco terico
LA ROBOTICALa definicin de la palabra robtica segn la vigsima segunda edicin del diccionario de la Real Academia Espaola es la tcnica que aplica la informtica al diseo y empleo de aparatos que, en sustitucin de personas, realizan operaciones o trabajos, por lo general en instalaciones industriales.El conjunto de conocimientos tericos y prcticos que permiten concebir, realizar y automatizar sistemas basados en estructuras mecnicas poli articuladas, dotados de un determinado grado de "inteligencia" y destinados a la produccin industrial o al sustitucin del hombre en muy diversas tareas.
Figura 3. Robot RV-2AJLa robtica es esencialmente pluridisciplinaria y se apoya en gran medida en los progresos de la microelectrnica y de la informtica, as como en los -11- de nuevas disciplinas tales como el reconocimiento de patrones y de inteligencia artificial. La robtica combina diversas disciplinas como la mecnica, la electrnica, la informtica, la matemtica, la inteligencia artificial y la ingeniera de control.Las aplicaciones de la robtica son extensas, por ejemplo: Industrial Medicina (biorobtica) Militar y seguridad Construccin Espacio Domstica y de oficinaEl brazo robtico de laboratorio est compuesto por diferentes partes tales como son: Robot, pc, controlador motores, sensores.
Figura 4. Componentes principales del robot
El robot RV-2AJ de Mitsubishi Electric pertenece a la serie RV-A. Con esta serie Mitsubishi ofrece robots de diferentes tamaos y compactos que pueden ser emplazados directamente junto a una instalacin o incluso dentro de ella. Las tareas de manipulacin para la colocacin o retirada de piezas pequeas representan el punto fuerte de estos dispositivos compactos.Brazo.- conjunto de articulaciones y eslabones interconectados que posicionan la mueca.Eslabn.- cuerpo rgido que mantiene unidas las articulaciones.Articulacin Prismtica.- unin entre dos eslabones que permiten a uno de ellos tener un movimiento lineal en relacin con el otro.Articulacin Rotacional.- unin entre dos eslabones que permiten a uno de ellos tener un movimiento giratorio alrededor del otro.Efector final.- es la parte instalada en el extremo del manipulador es equivalente a la mano humana.
Figura 5. Distintos tipos de articulaciones para robot
Actuador.- generan el movimiento de los elementos del robot segn las instrucciones dadas desde la unidad de control, estos actuadores pueden utilizar energa neumtica, hidrulica o elctrica.Grado de libertad.- cada una de las variables (de un mximo de 6) necesarias para definir los movimientos de un cuerpo en el espacio tanto posicin como orientacin.
procedimiento
REPRESENTACION DE LA POSICIONUn robot manipulador est diseado para operar en un espacio de trabajo, es decir est programado para soldar pintar cortar o tomar un objeto para depositarlo en otro lugar.
Figura 6. Escenario de una aplicacin del brazo robtico
En la escena completa se puede observar un robot manipulador que toma de una mesa un objeto.
Para la representacin espacial de los objetos es necesario incorporar ejes de referencia, tantos como sea necesario de acuerdo a un cambio de posicin y orientacin cinemtica.
Figura 7. Vector de posicin de un objeto con respecto a un sistema en tres dimensiones.
Donde a, b y c son las magnitudes de los vectores componentes de P. As la magnitud del vector P est dada por:
Para representar una traslacin simple sobre el eje de referencia x el vector de posicin est dado por:
Si queremos representar una traslacin simple a lo largo del eje y se tendr un vector de posicin expresado como:
Para representar una traslacin simple en direccin del eje z, se representa como:
La traslacin compuesta considera los movimientos en ms de un eje de referencia.La traslacin se puede ver como las distancia entre dos puntos, dado un punto con posicin inicial Pi y el mismo punto con una posicin final Pf como se observa en la figura.
Figura 8. Desplazamiento de un punto en el espacio.
En la figura tambin se establece diferencias entre dos puntos como se indica en la siguiente ecuacin.
Se puede notar que se presenta el caso en tres dimensiones del desplazamiento un punto en el espacio.Las coordenadas cartesianas no son las nicas empleadas para la representacin de una traslacin en el espacio, en particular las coordenadas cilndricas y esfricas son tomadas para describir configuraciones tpicas de los robots manipuladores.De acuerdo a una estandarizacin en robtica, la clasificacin de los robots lleva la siguiente configuracin bsica:Robot CartesianoContiene tres grados de libertad y sus articulaciones son prismticas en los tres ejes. De forma abreviada la configuracin cartesiana se puede denominar como PPP, por el tipo de articulacin. Las coordenadas asociadas son las cartesianas tal que cualquier punto en el espacio se describe mediante un vector de posicin como se muestra en la figura.
Robot CilndricoEs de tres grados de libertad, una articulacin, rotaciones y dos prismticas. La forma abreviada de la configuracin cilndrica es RPP. As, un punto ene le espacio en coordenadas cilndricas se expresa por:
Donde es el ngulo de orientacin y ri y zi son distancias recorridas al punto descrito, como se muestra en la figura.
Robot PolarDe los tres grados de libertad con los que cuenta el robot polar, dos son rotacionales y una prismtica. Las siglas usadas en un robot polar son RRP. Las coordenadas asociadas al robot son tales que describen un punto mediante:
Donde , son ngulos de orientacin y ri es el desplazamiento al punto Pi como se observa en la figura.
Robot angular o articuladoLos tres grados de libertad que posee son rotacionales dispuestos de forma tal que asemeja los movimientos del brazo de una persona. La configuracin angular es tambin llamada antropomrfica y es representada por las siglas RRR. La primera articulacin rotacional gira como una cintura, la segunda se mueve como un hombro y la tercera hace la funcin de un codo. Las variables que describen la posicin de un punto en el espacio esta dad por:
Donde , y son los ngulos de orientacin como se muestra en la figura.
CONCLUSIONES su parte positiva en relacin con el perodo. El manipulador tiende a moverse en el plano cartesiano de tal que sus movientes de giro sern el plano x, y, z Los grados de libertad del manipulador depende del tipo de robot q sea ya que tendr una variacin si es cartesiano, cilndrico o polar.
referencias
http://www.elai.upm.es/webantigua/spain/Asignaturas/Servos/Apuntes/7_OrdenSup.pd
![La%252525252520 selección%252525252520española[1][1][1][1][1][1]](https://static.fdocuments.es/doc/165x107/555b87d2d8b42acd238b497c/la252525252520-seleccion252525252520espanola111111.jpg)

![1 1 1 Mater Misericordiae...1 1 1 1 ï 1 1 û W \ \ ] , W ] ] Y ü 1 ï 1 ï 1 1 1 1 1 ï 1 ^ 1 . 1 1 1 ð 1 ï 1 1 %H QH LW WD H ODX GD GD VX EUD WRW WX JOR ULR VD 6X 'HXV RQQL SR](https://static.fdocuments.es/doc/165x107/5eb5520b7719645e2d7165b0/1-1-1-mater-misericordiae-1-1-1-1-1-1-w-w-y-1-1-1.jpg)
![Quecantenlosni Os 1 2 1 1 [1][1][1][1][1]. J.L.Perales](https://static.fdocuments.es/doc/165x107/5583ffd7d8b42a79268b47a7/quecantenlosni-os-1-2-1-1-11111-jlperales.jpg)




![1 g875 #$ 5 5 # (55 - Arzobispado de La Plata · 1 x 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 g875 #$ 5 5 # (55 / # (5 #--5 +dfld wx ox] fdplqduiq odv qdflrqhv \ orv sxheorv do ixojru](https://static.fdocuments.es/doc/165x107/5bb6725109d3f2f7768bca49/1-g875-5-5-55-arzobispado-de-la-1-x-1-1-1-1-1-1-1-1-1-1-1-1-1-1-1-1.jpg)


![CINCO RECO DS MUNDIALEShemeroteca-paginas.mundodeportivo.com/./EMD02/HEM/... · 3treoIes, 1 d fetxero de I91;1] MatacicCJdma;0] CINCO RECO DSMUNDIALES 1 1 1 1 1 1 1 1 1 1 1 1 1 1](https://static.fdocuments.es/doc/165x107/5f80ffd681d4d0156c04141b/cinco-reco-ds-mundialeshemeroteca-3treoies-1-d-fetxero-de-i911-mataciccjdma0.jpg)