Ingeniería de Control II -...
19
Control Moderno Control óptimo. Control robusto Elizabeth Villota 1
Transcript of Ingeniería de Control II -...
Control ModernoControl óptimo. Control robusto
Elizabeth Villota
1
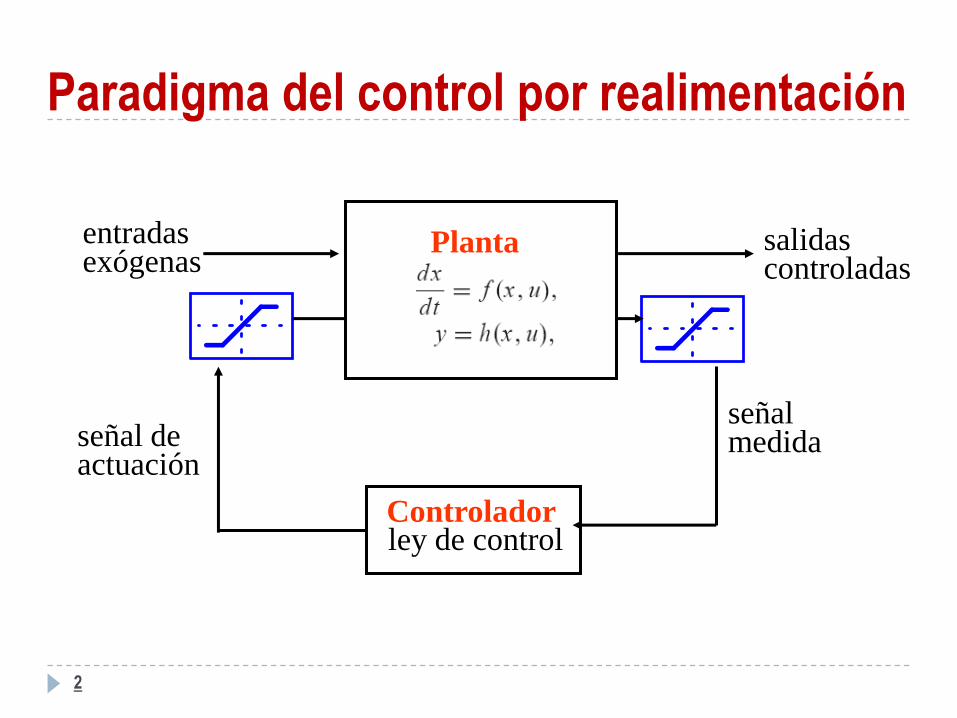
Paradigma del control por realimentación
2
Plantaentradas exógenas
señal deactuación
señal medida
salidascontroladas
Controladorley de control

Control por realimentación de estados
3
Controlador
entradas exógenas
señal deactuación
señal medida
salidascontroladas
ley de control
Planta
-K
r z
x u

r
Controlador
-K
Plantaz
xu
Sistema lineal
Controlabilidad Matriz de controlabilidad
Un sistema lineal es controlable si y sólo si rango(Wc)=n. n es el número de estados del sistema
Todos los estados deben ser medidos.
Requerimientos del sistema:
Control por realimentación de estados
c
4
(ctrb in MATLAB)
5
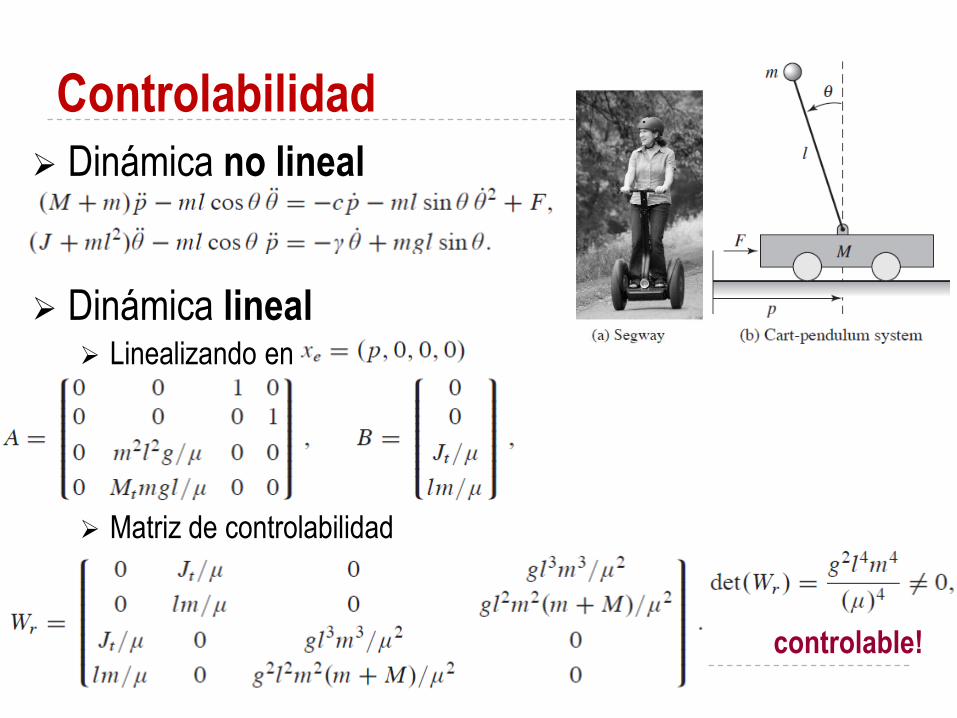
Controlabilidad
Dinámica no lineal
Dinámica lineal Linealizando en
Matriz de controlabilidad
controlable!

Asignación de autovalores:
(place in MATLAB)
Ley de control lineal
donde es el valor de referencia constante.
Sistema en lazo cerrado
Elegir tal que polinomio característico sistema en lazo cerrado sea
Autovalores de afectan la estabilidad.
afecta desempeño,
Control por ubicaciónde polos
6
7
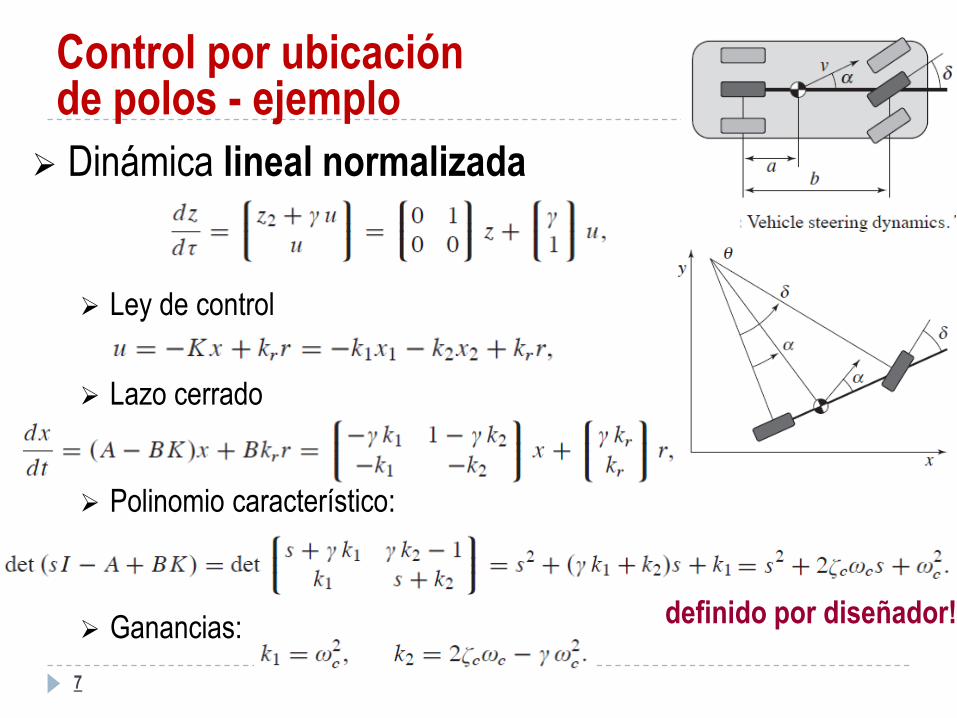
Control por ubicaciónde polos - ejemplo
Dinámica lineal normalizada
Ley de control
Lazo cerrado
Polinomio característico:
Ganancias: definido por diseñador!
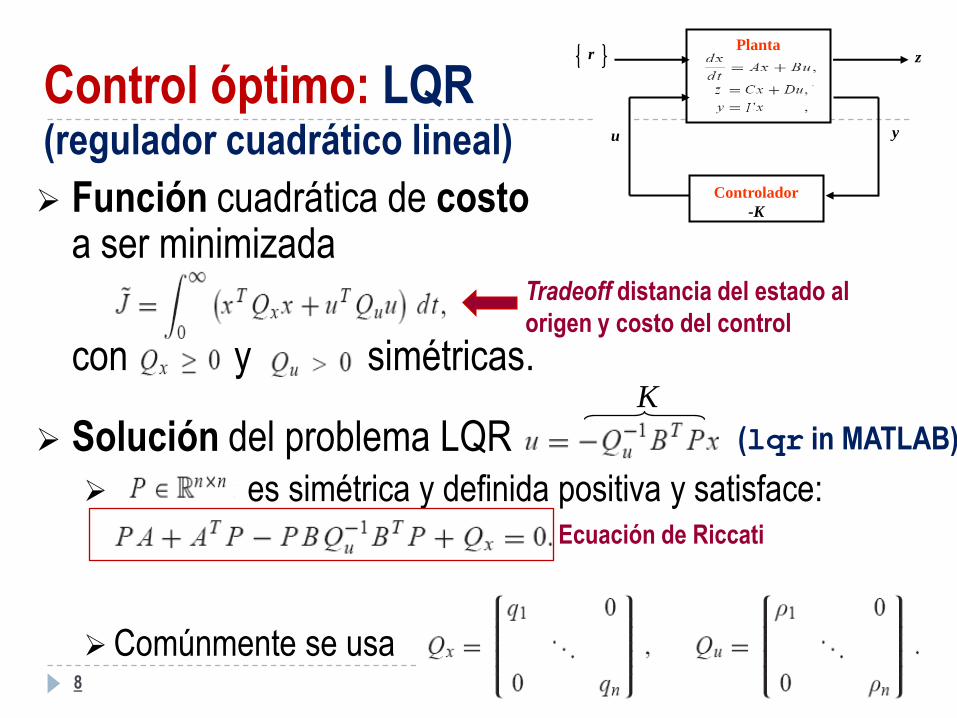
Tradeoff distancia del estado al
origen y costo del control
(lqr in MATLAB)
Función cuadrática de costoa ser minimizada
con y simétricas.
Solución del problema LQR
jes simétrica y definida positiva y satisface:
Comúnmente se usa
K
r
Controlador
-K
Plantaz
y u
Control óptimo: LQR(regulador cuadrático lineal)
8
Ecuación de Riccati

10
Dinámica linealizada del sistema
con punto de equilibrio
Función de costo:
con ,
Controlador:
ρ
LQR – Aeronave de impulsión
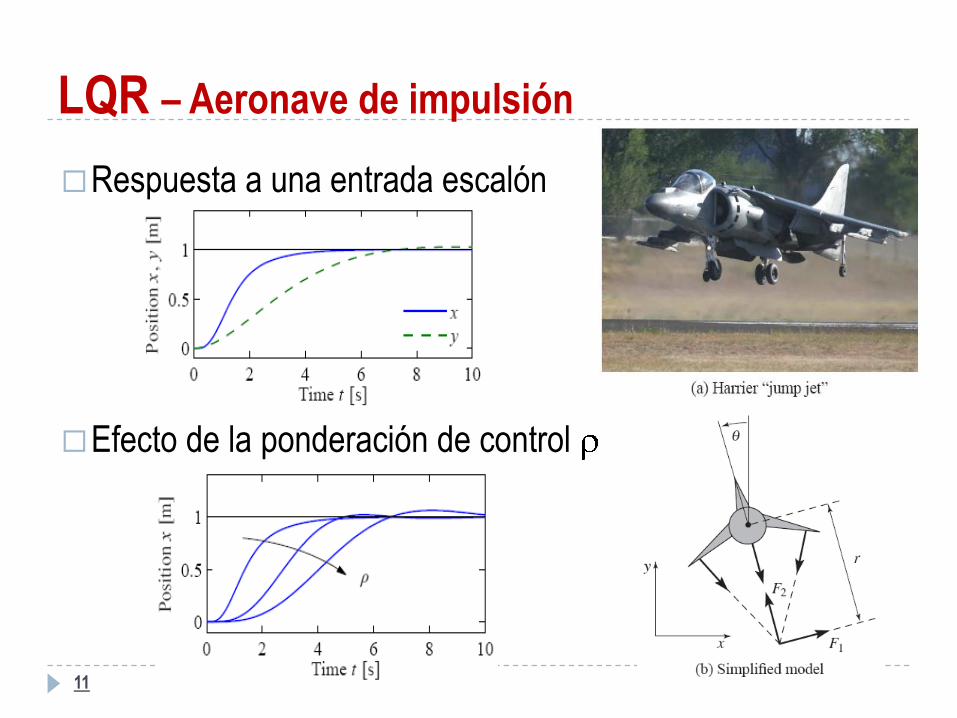
11
Respuesta a una entrada escalón
Efecto de la ponderación de control
LQR – Aeronave de impulsión
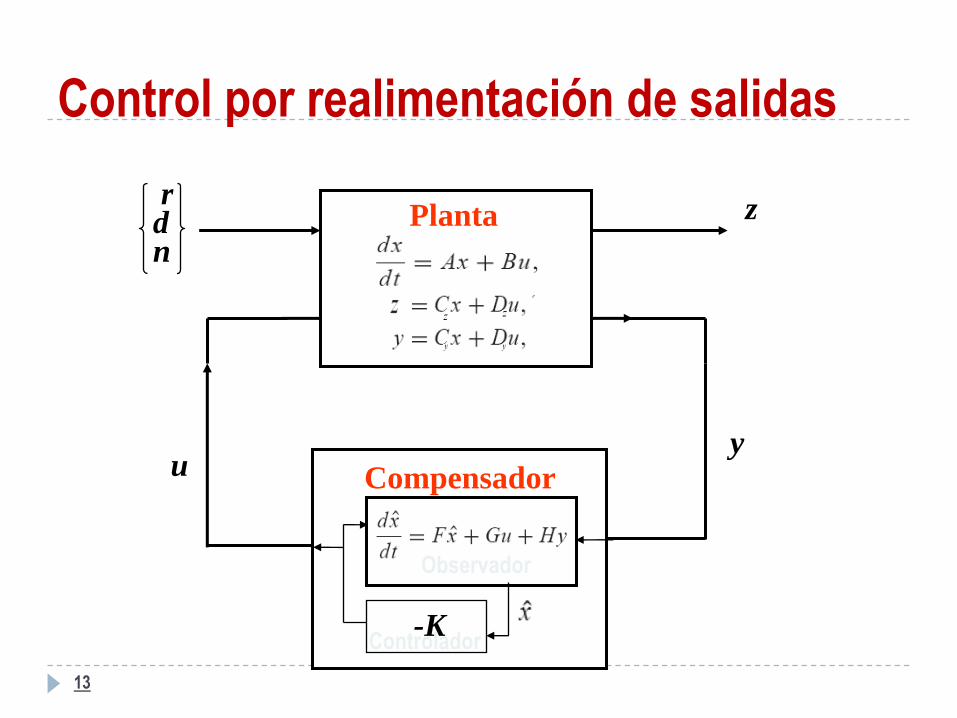
Control por realimentación de salidas
13
Controlador
entradas exógenas
señal deactuación
señal medida
salidascontroladas
Plantar dn
z
y u Compensador
-K
observador
Controlador
Observador

Control por realimentación de salidas
14
Sistema (multidimensional) lineal
Observabilidad
Un sistema lineal es observable si y sólo si la matrizde observabilidad es de rango completo.
Requerimientos del sistema:
Controlador
Plantar dn
z
y
u
.
Compensador
K
(obsv in MATLAB)
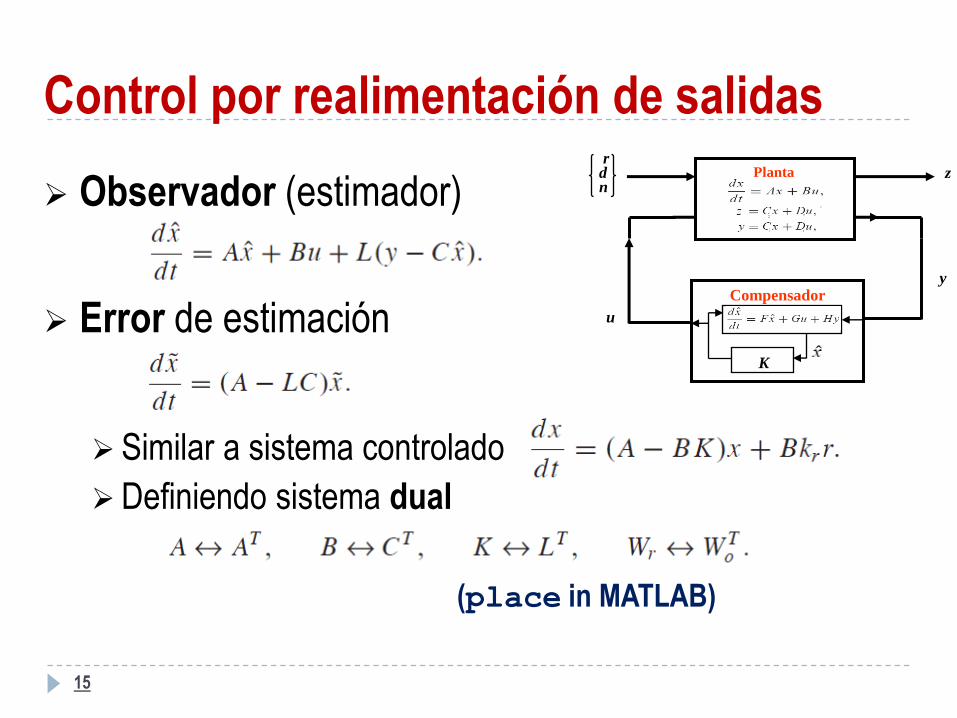
15
Observador (estimador)
Error de estimación
Similar a sistema controlado
Definiendo sistema dual
Controlador
Plantar dn
z
y
u
.
Compensador
K
(place in MATLAB)
Control por realimentación de salidas

16
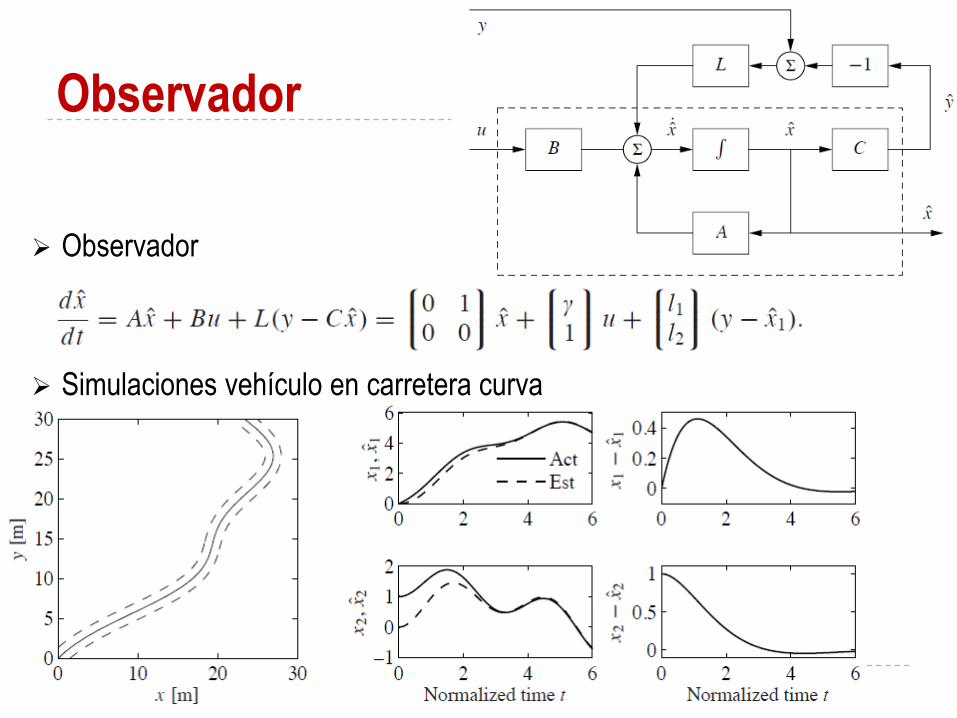
Observador
Dinámica lineal
Matriz de observabilidad
Se cumple:
Ganancias:
definido por diseñador!
17
Observador
Observador
Simulaciones vehículo en carretera curva
Controlador
Plantar dn
z
y
u
.
Compensador
K
18
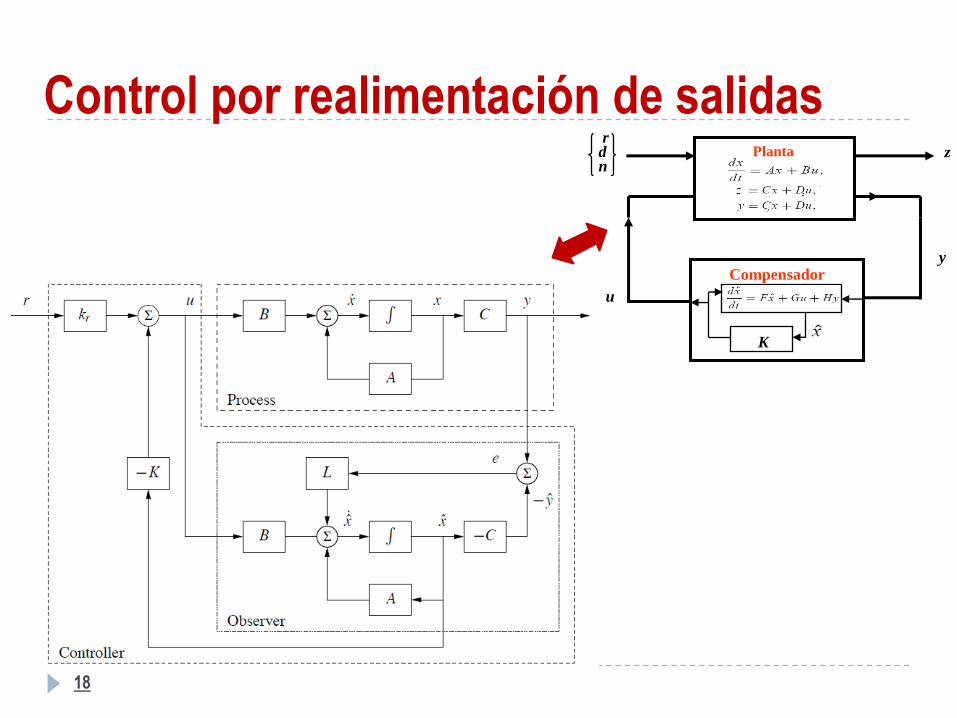
Control por realimentación de salidas

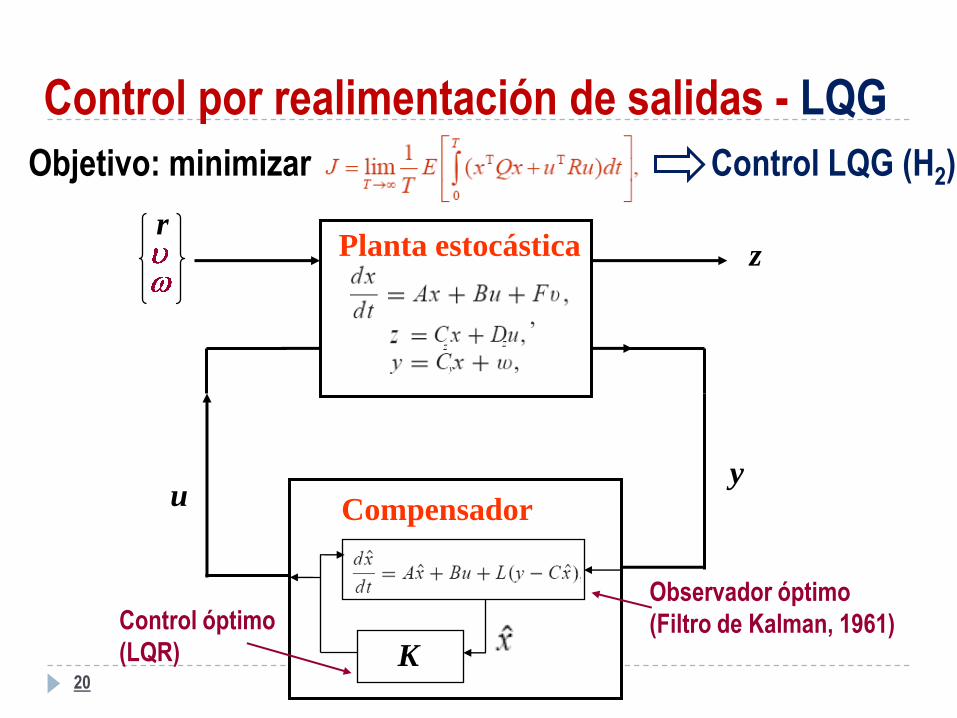
19
Controladorley de control
Planta estocástica
estocástica
K(.)
r
z
yu
.
Compensador
K
Observador óptimo
(Filtro de Kalman ,
1961)
Observador óptimo
Función de costo a ser minimizada
Solución del problema FK:
es simétrica y definidapositiva y satisface:
Siendo que:
Ecuación de Riccati
Controlador
señal deactuación
señal medida
ley de control
Planta estocástica
K(.)
r z
y u
.
Compensador
K
Observador óptimo
(Filtro de Kalman, 1961)
Objetivo: minimizar Control LQG (H2)
Control óptimo
(LQR)
Control por realimentación de salidas - LQG
20
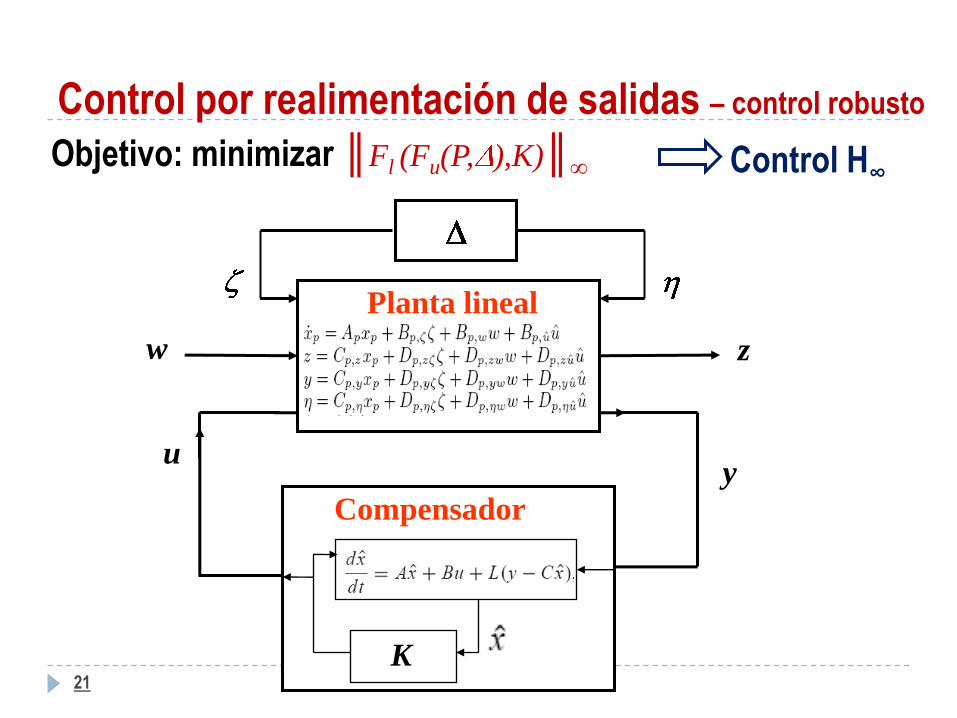
Control por realimentación de salidas – control robusto
21
Controlador
señal deactuación señal
medida
ley de control
Planta lineal
K(.)
w z
y u
.
Compensador
K
Objetivo: minimizar ║Fl (Fu(P, ),K)║∞ Control H∞