INTRODUCCIÓN A LA TEORÍA DE TELETRÁFICO
89
Universidad Nacional de Colombia INTRODUCCIÓN A LA TEORÍA DE TELETRÁFICO ESTADÍSTICA DE LAS TELECOMUNICACIONES Jorge Eduardo Ortiz Triviño 21/02/2012
Transcript of INTRODUCCIÓN A LA TEORÍA DE TELETRÁFICO
Universidad Nacional de Colombia
INTRODUCCIÓN A LA TEORÍA DE TELETRÁFICO ESTADÍSTICA DE LAS TELECOMUNICACIONES
Jorge Eduardo Ortiz Triviño 21/02/2012
2
3
TABLA DE CONTENIDO
1 INTRODUCCIÓN A LA TEORÍA DE TELETRÁFICO ............................................................. 9
1.1 TELETRÁFICO COMO DISCIPLINA .................................................................................. 10
1.2 MODELAMIENTO DE SISTEMAS DE TELECOMUNICACIONES ........................... 11
1.3 LA UIT Y LA INGENIERÍA DE TELETRÁFICO ............................................................. 12
1.4 LAS UNIDADES DE TRÁFICO Y LOS “ERLANGS” . ..................................................... 14
1.5 LA HORA DE OCUPACIÓN Y EL BLOQUEO ................................................................... 18
1.6 MODELOS DE TRÁFICO ........................................................................................................ 22
1.6.1 Erlang B .............................................................................................................................. 22
1.6.2 Erlang B Extendido ........................................................................................................ 22
1.6.3 Erlang C ............................................................................................................................... 22
1.7 RESUMEN DEL CAPÍTULO .................................................................................................. 22
2 COMPENDIO DE TEORÍA DE PROBABILIDADES ............................................................. 24
2.1 INTRODUCCIÓN ...................................................................................................................... 25
2.2 ESPACIOS DE PROBABILIDAD .......................................................................................... 25
2.3 PRINCIPIOS FUNDAMENTALES DE LA TEORÍA DE LA MEDIDA ....................... 32
2.3.1 Reglas de la medida continua .................................................................................... 33
2.3.2 Reglas del conteo ............................................................................................................ 36
2.4 PROBABILIDAD CONDICIONAL E INDEPENDENCIA ESTOCÁSTICA ................ 38
2.5 VECTOR ALEATORIO Y FUNCIÓN DE DISTRIBUCIÓN CONJUNTA .................... 46
2.5.1 Introducción ..................................................................................................................... 46
2.5.2 Definiciones ...................................................................................................................... 46
2.6 FUNCIONES DE DENSIDAD CONJUNTAS ...................................................................... 47
2.6.1 Vectores aleatorios discretos .................................................................................... 47
2.6.2 Vectores Aleatorios continuos .................................................................................. 48
2.6.3 Otras clases de vectores aleatorios ......................................................................... 48
4
2.7 DISTRIBUCIONES CONDICIONALES E INDEPENDENCIA ESTOCÁSTICA ....... 49
2.7.1 Vectores Aleatorios Continuos ................................................................................. 49
2.7.1.1 Distribuciones Marginales ................................................................................ 49
2.7.1.2 Distribuciones Condicionales .......................................................................... 49
2.7.2 Vectores Aleatorios Discretos ................................................................................... 52
2.7.2.1 Distribuciones Marginales ................................................................................ 52
2.7.2.2 Distribuciones Condicionales .......................................................................... 52
2.7.3 Independencia ................................................................................................................. 52
2.8 ESPERANZA MATEMÁTICA Y MOMENTOS ................................................................. 53
2.8.1 Valor Esperado de Funciones de Variables Aleatorias ................................... 53
2.8.2 Momentos .......................................................................................................................... 54
2.8.3 Covarianza y Coeficiente de Correlación .............................................................. 56
2.8.4 Funciones generadoras de Momentos .................................................................. 57
2.8.5 Esperanza e Independencia ....................................................................................... 57
2.9 TRANSFORMACIONES .......................................................................................................... 58
2.9.1 CASO UNIVARIADO ........................................................................................................ 58
2.9.1.1 Transformación lineal univariada ................................................................. 58
2.9.1.2 Suma de dos variables aleatorias ................................................................... 58
2.9.1.3 Cuadrado de una variable aleatoria .............................................................. 58
2.9.2 VECTORES ALEATORIOS DISCRETOS ................................................................... 59
2.9.3 VECTORES ALEATORIOS CONTINUOS ................................................................. 60
2.9.3.1 Formulación ............................................................................................................ 60
2.9.3.2 Transformación continua general ................................................................. 61
2.10 FAMILIA DE GAUSS MULTIDIMENSIONAL ............................................................. 63
2.10.1 Función de densidad ................................................................................................. 63
2.10.2 Integral De Aitken ...................................................................................................... 63
5
2.10.3 Función Generadora De Momentos .................................................................... 64
2.10.4 Distribuciones Marginales ...................................................................................... 65
2.10.5 Distribuciones Condicionales ................................................................................ 67
2.10.6 Independencia ............................................................................................................. 69
2.11 FAMILIAS DE DISTRIBUCIONES UNIVARIADAS ................................................... 69
2.11.1 Introducción ................................................................................................................. 69
2.11.2 Familias de Distribuciones Discretas ................................................................. 70
2.11.2.1 Bernoulli ................................................................................................................. 70
2.11.2.2 Con restitución: Modelo binomial ............................................................... 70
2.11.2.3 Sin restitución: Modelo Hipergeométrico ................................................ 73
2.11.2.4 Poisson .................................................................................................................... 74
2.11.2.5 Geométrica ............................................................................................................ 74
2.11.3 Familias de Distribuciones Continuas ............................................................... 74
2.11.3.1 Uniforme ................................................................................................................ 74
2.11.3.2 Gauss ........................................................................................................................ 76
2.11.3.3 Exponencial ........................................................................................................... 76
2.11.3.4 Erlang ...................................................................................................................... 76
2.11.3.5 Gamma .................................................................................................................... 77
2.11.4 RELACIONES ENTRE FAMILIAS ........................................................................... 77
2.12 EJERCICIOS............................................................................................................................ 78
2.13 RESUMEN DEL CAPÍTULO .............................................................................................. 78
3 PROCESOS ESTOCÁSTICOS ....................................................................................................... 80
3.1 INTRODUCCIÓN ...................................................................................................................... 80
3.2 DEFINICIÓN .............................................................................................................................. 80
3.3 LAS FUNCIONES DE AUTOCOVARIANZA Y AUTOCORRELACIÓN ..................... 86
3.4 FUNCION DE AUTOCORRELACIÓN PARCIAL ............................................................. 86
6
3.5 PROCESOS CON RUIDO BLANCO ..................................................................................... 86
3.6 CADENAS DE MARKOV EN TIEMPO DISCRETO ........................................................ 86
3.6.1 Introducción ..................................................................................................................... 86
3.6.2 Ecuaciones de Chapman–Kolmogorov .................................................................. 86
3.6.3 Clasificación de los Estados ....................................................................................... 86
3.7 CADENAS DE MARKOV DE TIEMPO CONTINUO ....................................................... 86
3.7.1 Introducción ..................................................................................................................... 86
3.7.2 Definición ........................................................................................................................... 86
3.7.3 Procesos de Nacimiento y Muerte ........................................................................... 86
3.7.4 Función de Transición de Probabilidad ................................................................ 87
3.7.5 Reversibilidad .................................................................................................................. 87
3.8 DISTRIBUCIÓN EXPONENCIAL Y EL PROCESO DE POISSON .............................. 87
3.8.1 Introducción ..................................................................................................................... 87
3.8.2 Definición de Proceso de Poisson ............................................................................ 87
3.8.3 Distribuciones de los Tiempos entre llegadas y de Esperas ........................ 87
3.8.4 proceso de Poisson no homogéneo ........................................................................ 87
3.9 **TEORÍA DE RENOVACIÓN .............................................................................................. 87
3.10 EJERCICIOS............................................................................................................................ 87
3.11 RESUMEN DEL CAPÍTULO .............................................................................................. 87
4 MODELOS DE TRÁFICO ............................................................................................................... 88
4.1 ERLANG B: SISTEMA DE PÉRDIDA DE ERLANG ....................................................... 88
4.2 ERLANG B EXTENDIDO: EXTENDIDO. ........................................................................... 88
4.3 ERLANG C: SISTEMA CON RETARDO ............................................................................. 88
4.4 **REDES DE COLAS ................................................................................................................ 88
5 DIMENSIONAMIENTO DE REDES DE TELECOMUNICACIONES ................................ 88
6 MEDIDAS DE TRÁFICO ................................................................................................................ 88
7
7 REFERENCIAS BIBLIOGRÁFICAS ............................................................................................ 89
8
LISTA DE FIGURAS
Figura 1—1: Abstracción del proceso de una llamada en un sistema telefónico. ..... 13
Figura 1—2: Recomendaciones de la UIT sobre Ingeniería de teletráfico. .................. 14
Figura 1—3_ Tráfico transportado (Intensidad) ..................................................................... 16
Figura 1—4: Número de llamadas por minuto en un centro de conmutación un
lunes en la mañana. .............................................................................................................................. 19
Figura 1—5: Número promedio de llamadas por minuto en un centro de
conmutación. ........................................................................................................................................... 19
Figura 1—6: Tiempo medio de ocupación de una línea troncal en función de la hora
del día. ........................................................................................................................................................ 21
Figura 2—1: Espacio muestral y eventos de interés del ejemplo de Galois ................ 34
Figura 2—2: Espacio muestral y eventos de interés del ejemplo de las raíces .......... 35
Figura 2—3: Factores importantes en el proceso de contar .............................................. 37
Figura 2—4: Diagramas de medida para el ejemplo de probabilidad combinatoria
....................................................................................................................................................................... 38
Figura 2—5: Representación gráfica de las propiedades de los eventos B. ................. 39
Figura 2—6: Función de densidad uniforme............................................................................. 75
Figura 2—7: Función de Distribución uniforme. ..................................................................... 75
Figura 2—8: Probabilidad uniforme. ............................................................................................ 75
9
1 INTRODUCCIÓN A LA TEORÍA DE TELETRÁFICO
Agner Krarup Erlang (1878 - 1929), conocido como “El
Padre de la Teoría de Teltráfico”, ingreso a la Universidad
de Copenhague en 1896. Dada su notable capacidad
intelectual obtuvo una beca para la universidad y se graduó
en matemáticas en 1901. Se desempeñó como profesor,
actividad que le permitió mantener su interés por las
matemáticas aplicadas. Fue miembro de la asociación
danesa de matemáticas, por medio de la cual conoció a
Johan Jensen, el ingeniero jefe de la Copenhagen Telephone
Company (CTC), la cual era una subsidiaria de International
Bell Telephone Company. Erlang trabajó por casi 20 años
para CTC, desde 1908 hasta su muerte en Copenhague en
1928.
Erlang abordó el problema clásico de la determinación de cuántos circuitos
eran necesarios para proveer un servicio telefónico aceptable. Erlang
desarrolló su teoría del tráfico telefónico a través de varios años. Entre sus
publicaciones más importantes sobre la materia, se encuentran: En 1909 - "La
teoría de las probabilidades y las conversaciones telefónicas" - la cual
demostró que la Distribución de Poisson se aplica para tráfico telefónico
aleatorio. En 1917 - "Solución de algunos problemas en la teoría de
probabilidades de importancia en centrales telefónicas automáticas" - el cual
contiene su fórmula clásica para el cálculo de pérdidas y tiempos de espera.
Hacia 1944 el "Erlang" era usado en los países escandinavos para denotar la
unidad de tráfico telefónico. Esta unidad de medida fue reconocida
internacionalmente al final de la segunda guerra mundial. Así mismo una
distribución estadística y un lenguaje de programación llevan su nombre.
Entre aquéllos que continuaron con las ideas de Erlang, debemos mencionar al
sueco Conny Palm, cuyos aportes durante el período 1936 - 1946 (1957)
contribuyeron a dar a la teoría de trafico su actual rigor.
En este capítulo se hace presentan las bases de la teoría de teletráfico, se establecen
las definiciones básicas y se presentan algunos ejemplos que ilustran la forma de
trabajo en esta disciplina.
10
1.1 TELETRÁFICO COMO DISCIPLINA
Definición 1—1: Teletráfico.
Disciplina1 que se encarga de aplicar rigurosamente la teoría de probabilidades y la
teoría de estadísticas al estudio de la estructura estocástica y el comportamiento2
en la actividad de un sistema de telecomunicaciones en todas las etapas de su ciclo
de vida.
Como cualquier sistema, bien sea vivo o artificial, un sistema de
telecomunicaciones se concibe para cumplir uno o varios fines, nace, crece, procura
cumplir su fin, intenta reproducirse, muere y posiblemente trasciende.
Por lo anterior, algunos de los objetivos de esta disciplina son:
1. Concebir nuevos sistemas de telecomunicaciones que cumplan con
características estructurales, medidas de desempeño y criterios de
optimización predefinidos y claramente establecidos.
2. Diseñar y/o adaptar el contexto en el cual se desenvolverá dicho
sistema complejo.
3. Planear, Diseñar e implementar un nuevo sistema de
telecomunicaciones que cumpla con algunas medidas de servicio,
robustez y desempeño deseados y claramente establecidas.
4. Planear su evolución y adaptación dentro del entorno para el cual fue
concebido.
5. Generar políticas claras de mantenimiento y control que garanticen su
fin teleológico.
6. Planear su fin o expiración.
1 Arte, facultad o ciencia.
2 Véase [5]
11
Para cumplir con estos y otros fines, y responder preguntas tales como ¿cuánto
equipo debe proveerse para que la proporción de llamadas que experimentan
retardos esté por debajo de un nivel aceptable específico? o bien ¿cuántos
terminales de datos pueden ser conectados a un servicio de computadora de
tiempo compartido?, el teletráfico requiere métodos de pronóstico de demandas y
flujos de información, métodos para calcular la capacidad del sistema y la
construcción de medidas de desempeño para medir el grado de servicio; por ello, se
sirve de varias herramientas formales, entre las que vale incluir las siguientes:
1. La teoría de probabilidades,
2. La Teoría de estadísticas,
3. Proceso estocásticos,
4. Simulación de sistema,
5. Métodos numéricos,
6. Teoría de colas y Teoría redes de colas,
7. Teoría de decisiones y teoría de juegos.
Axioma 1—1: Estacionariedad.
La teoría aquí presentada se basa en el supuesto del equilibrio estadístico, esto es,
que ésta sólo puede tratar con sistemas de telecomunicaciones sujetos a
condiciones estacionarias.
Aún no se ha propuesto métodos teóricos de uso práctico para comprender los
Sistemas de Telecomunicaciones bajo condiciones no estacionarias. Sin embargo, el
primer trabajo teórico (pero no general) para abordar tales casos se presentó en la
tesis doctoral de Palm, realizada en 1943. En ese trabajo se presentó un estudio de
variaciones en la intensidad de llamadas. En la actualidad, mediante simulaciones
computarizadas es posible tratar estudiar sistemas de telecomunicaciones con en
el cual fluye tráfico no estacionario. Sin embargo, las teorías aquí consideradas se
limitarán a las condiciones estacionarias, a menos que se indique lo contrario.
1.2 MODELAMIENTO DE SISTEMAS DE TELECOMUNICACIONES
12
Abstraer las principales características de un sistema de telecomunicaciones real
requiere la consideración de tres elementos fundamentales:
1. La estructura del Sistema de Telecomunicaciones (hardware). En este
nivel se pueden presentar fallas relativamente aleatorias,
2. La estrategia operacional (Software). Aquí se consideran las reglas de
operación del sistema y
3. Las propiedades estadísticas del tráfico (Demanda de los usuarios). En
este aspecto se consideran las propiedades de las estructuras
probabilísticas del tráfico; por ejemplo, un proceso estocástico de de
Poisson nacimiento y muerte.
Un modelo3 es satisfactorio si cumple simultáneamente las siguientes cuatro
condiciones[1]:
1. Es elegante,
2. Contiene pocos elementos arbitrarios o ajustables,
3. Concuerda con las observaciones existentes y proporciona una
explicación de ellas,
4. Realiza predicciones detalladas sobre observaciones futuras que
permitirán refutar o falsear el modelo si no son confirmadas.
El Ejemplo 1—1 ilustra la idea de modelo
1.3 LA UIT Y LA INGENIERÍA DE TELETRÁFICO
Las recomendaciones sobre la ingeniería de tráfico se pueden clasificar de acuerdo
con cuatro tareas:
3 Se entiende por modelo a un esquema teórico, generalmente en forma matemática, de un sistema o de una realidad
compleja, como la abstracción simplificada de un sistema de telecomunicaciones a través de una maqueta, que se elabora
para facilitar su comprensión y el estudio de su comportamiento.
13
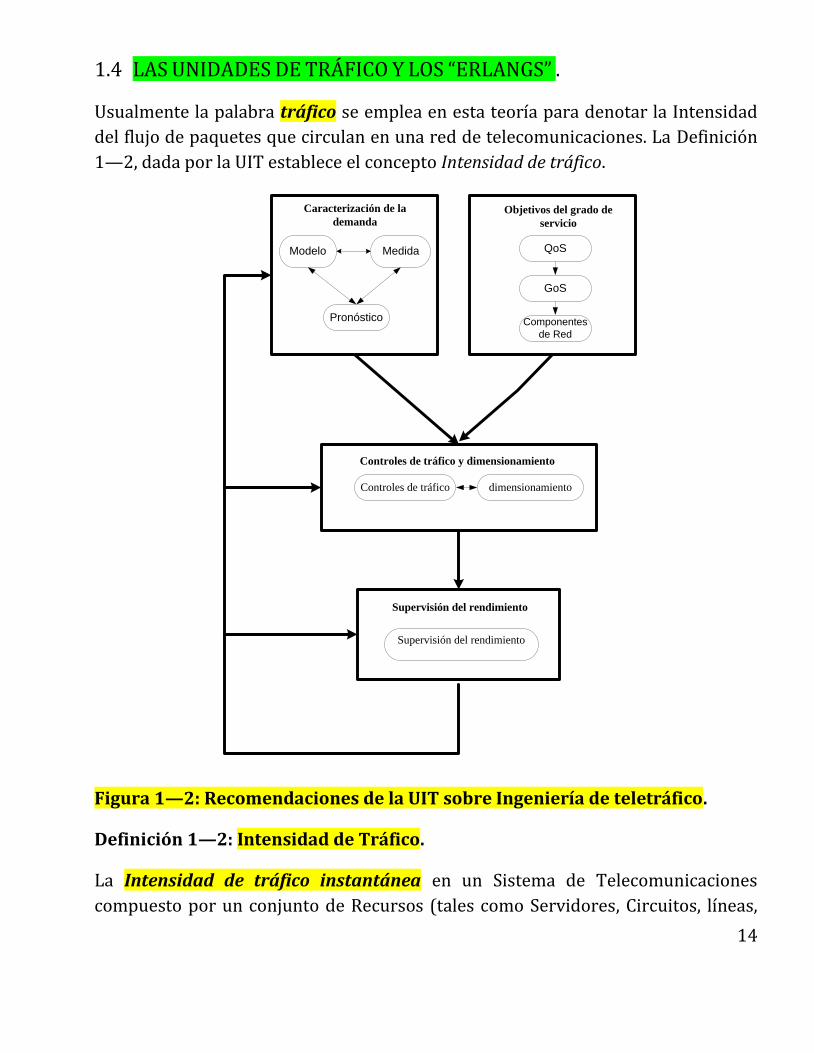
1. Caracterización de la demanda de tráfico,
2. Objetivos del grado de servicio (GoS),
3. Controles de tráfico y dimensionamiento, y
4. Supervisión del rendimiento.
La interacción entre estos cuatro elementos se presenta en la Figura 1—2.
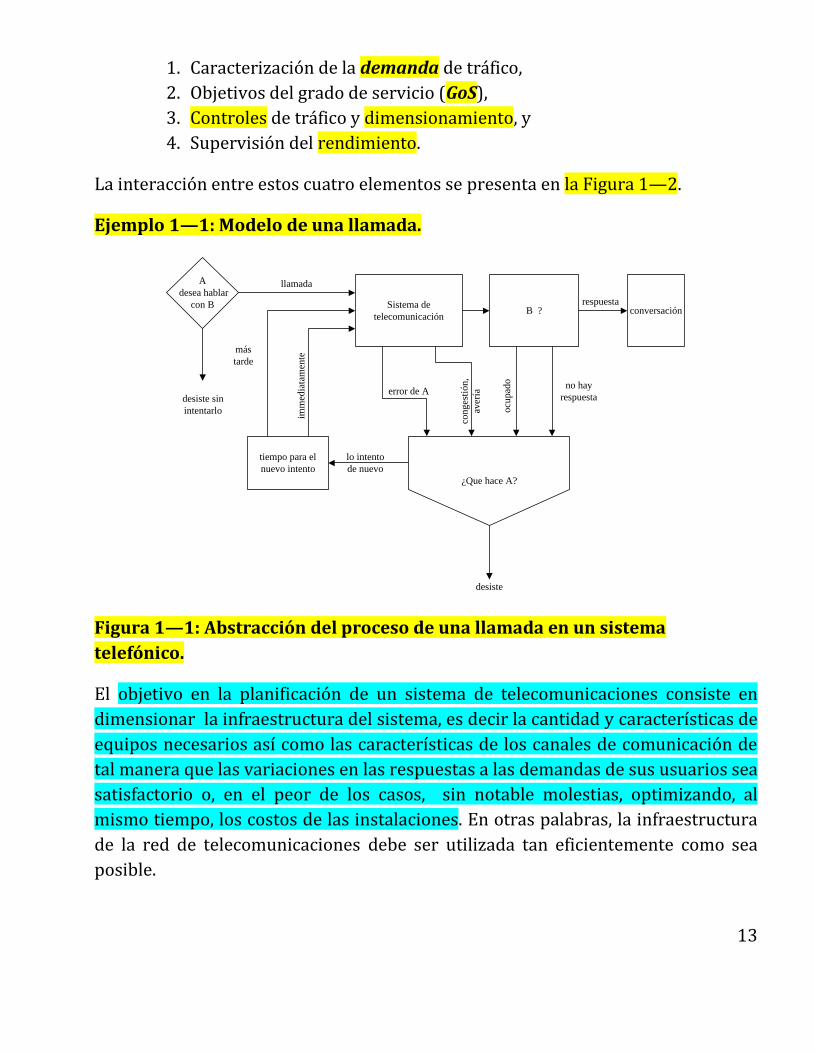
Ejemplo 1—1: Modelo de una llamada.
A
desea hablar
con B Sistema de
telecomunicación
tiempo para el
nuevo intento
B ?
¿Que hace A?
conversaciónrespuesta
llamada
desiste sin
intentarlo
más
tarde
imm
edia
tam
ente
lo intento
de nuevo
desiste
error de A
con
ges
tión
,
aver
ía
ocu
pad
o no hay
respuesta
Figura 1—1: Abstracción del proceso de una llamada en un sistema
telefónico.
El objetivo en la planificación de un sistema de telecomunicaciones consiste en
dimensionar la infraestructura del sistema, es decir la cantidad y características de
equipos necesarios así como las características de los canales de comunicación de
tal manera que las variaciones en las respuestas a las demandas de sus usuarios sea
satisfactorio o, en el peor de los casos, sin notable molestias, optimizando, al
mismo tiempo, los costos de las instalaciones. En otras palabras, la infraestructura
de la red de telecomunicaciones debe ser utilizada tan eficientemente como sea
posible.
14
1.4 LAS UNIDADES DE TRÁFICO Y LOS “ERLANGS” .
Usualmente la palabra tráfico se emplea en esta teoría para denotar la Intensidad
del flujo de paquetes que circulan en una red de telecomunicaciones. La Definición
1—2, dada por la UIT establece el concepto Intensidad de tráfico.
Modelo Medida
Pronóstico
QoS
GoS
Componentes
de Red
Controles de tráfico dimensionamiento
Supervisión del rendimiento
Caracterización de la
demanda Objetivos del grado de
servicio
Controles de tráfico y dimensionamiento
Supervisión del rendimiento
Figura 1—2: Recomendaciones de la UIT sobre Ingeniería de teletráfico.
Definición 1—2: Intensidad de Tráfico.
La Intensidad de tráfico instantánea en un Sistema de Telecomunicaciones
compuesto por un conjunto de Recursos (tales como Servidores, Circuitos, líneas,
15
troncales, Canales, etc) es el número de recursos ocupados en un instante de
tiempo dado. Formalmente, la intensidad instantánea se denota por la función n t
.
Definición 1—3: Unidad de medida de tráfico ( .U T ).
La unidad de medida de la intensidad del tráfico n t en un Sistema de
telecomunicaciones se denomina el Erlang. En forma abreviada se escribe E o
bien Erl. En sentido estricto un Erlang representa el uso continuo de un canal de
voz; pero en la práctica se emplea para medir el volumen de tráfico en una hora.
Los Erlangs son adimensionales.
En la caracterización del tráfico es necesario el cálculo de los momentos
estadísticos, tales como la media y la varianza, de la intensidad de tráfico
instantánea.
Definición 1—4: Intensidad media del tráfico en el periodo T .
En un periodo de tiempo T en el cual la intensidad del tráfico está dada por n t , la
intensidad media del tráfico se define como 1
T
Y T n t dtT
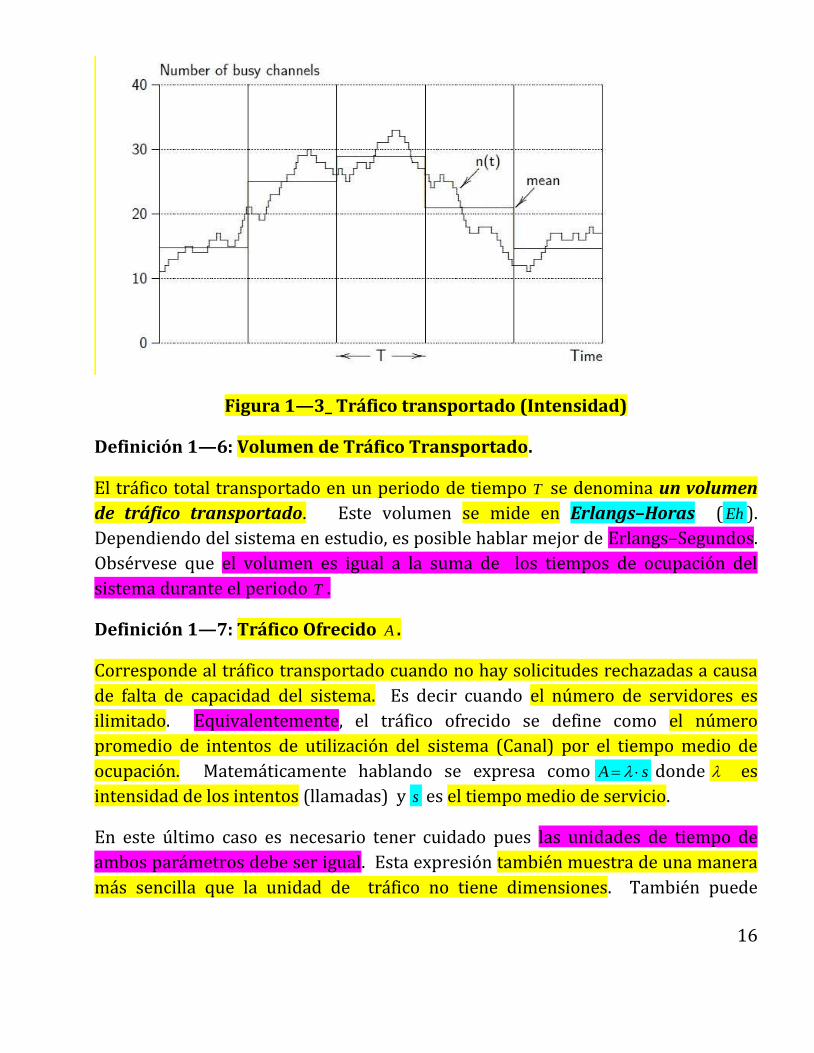
Definición 1—5: Tráfico Transportado CA .
Denotado por CY A corresponde al tráfico transportado (cursado) por el grupo de
servidores en el periodo de tiempo T . El tráfico transportado nunca excede al
número de canales (líneas). Nótese que un canal puede a lo más transportar un
Erlang.
16
Figura 1—3_ Tráfico transportado (Intensidad)
Definición 1—6: Volumen de Tráfico Transportado.
El tráfico total transportado en un periodo de tiempo T se denomina un volumen
de tráfico transportado. Este volumen se mide en Erlangs–Horas ( Eh ).
Dependiendo del sistema en estudio, es posible hablar mejor de Erlangs–Segundos.
Obsérvese que el volumen es igual a la suma de los tiempos de ocupación del
sistema durante el periodo T .
Definición 1—7: Tráfico Ofrecido A .
Corresponde al tráfico transportado cuando no hay solicitudes rechazadas a causa
de falta de capacidad del sistema. Es decir cuando el número de servidores es
ilimitado. Equivalentemente, el tráfico ofrecido se define como el número
promedio de intentos de utilización del sistema (Canal) por el tiempo medio de
ocupación. Matemáticamente hablando se expresa como A s donde es
intensidad de los intentos (llamadas) y s es el tiempo medio de servicio.
En este último caso es necesario tener cuidado pues las unidades de tiempo de
ambos parámetros debe ser igual. Esta expresión también muestra de una manera
más sencilla que la unidad de tráfico no tiene dimensiones. También puede
17
observarse que esta medida es teórica y no puede ser calculada de forma exacta
para un sistema simplemente se puede estimar.
Definición 1—8: Tráfico Perdido o rechazado lA .
El tráfico perdido en un Sistema de Telecomunicaciones corresponde a la
diferencia entre el tráfico Ofrecido y el tráfico transportado. Esto es l CA A A .
Claramente, el tráfico perdido se puede disminuir al incrementar la capacidad del
sistema.
Ejemplo 1—2: Cálculo del tráfico.
Si un grupo de personas hacen 30 llamadas en una hora y cada llamada tiene una
duración de 5 minutos, dicho grupo ha tenido un tráfico de 2,5 Erlangs. Esta cifra
resulta de lo siguiente:
Minutos de tráfico en una hora = número de llamadas x duración
Minutos de tráfico en esa hora = 30 x 5
Minutos de tráfico en esa hora = 150
Horas de tráfico por hora = 150 / 60
Horas de tráfico por hora = 2.5
Valor del Tráfico = 2.5 Erlangs
Las medidas de tráfico Erlang sirven para que los diseñadores de redes entiendan
bien las pautas de tráfico que se produce en su red y, en consecuencia, diseñen la
topología adecuada y dimensionen bien los enlaces.
En sistemas de transmisión de datos no se habla de tiempos de servicio sino de
demandas de transmisión. En este caso se habla de paquetes de s unidades tales
como bits o bytes. La capacidad del sistema se expresa o mide en unidades por
segundo (Por ejemplo bits/seg). El tiempo de servicio para un trabajo es s
cuyas
unidades son en segundos. De esta manera si en promedio son atendidos por
18
unidad de tiempo entonces la utilización del sistema es s
. La utilización es
una medida que siempre se encuentra en el intervalo 0,1 .
La capacidad de este tipo de sistemas basados en datos se mide en unidades
denominadas BBU (Unidades de ancho de banda básicas) o simplemente canales.
Se elige esta unidad de manera que todos los servicios requieren un número entero
de unidades de ancho de banda.
Cuando un número N de tipos de tráfico ocupan jd canales el tráfico ofrecido esta
dado por 1
N
j j j
j
A s d
Erlangs–Canales. Aquí j y
js son la tasa de llegadas y el
tiempo medio de ocupación del tráfico tipo j . En este caso tanto el tráfico
transportado como el tráfico ofrecido se miden en BBU.
Definición 1—9: Tráfico potencial.
Es el tráfico ofrecido cuando no hay restricciones de recuersos tales como el costo o
la disponibilidad.
1.5 LA HORA DE OCUPACIÓN Y EL BLOQUEO
Varios estudios muestran que, conocidos el contexto, la estructura y la actividad
principal a la cual se dedica el sistema de telecomunicaciones, el comportamiento
del tráfico, aunque estocástico, presenta patrones regulares que permiten
modelarlo para poder hacer predicciones sobre el sistema.
Las investigaciones muestran que en estos comportamientos conviven dos tipos de
comportamientos: Una parte determinística y una estocástica. La Figura 1—4
muestra esta idea.
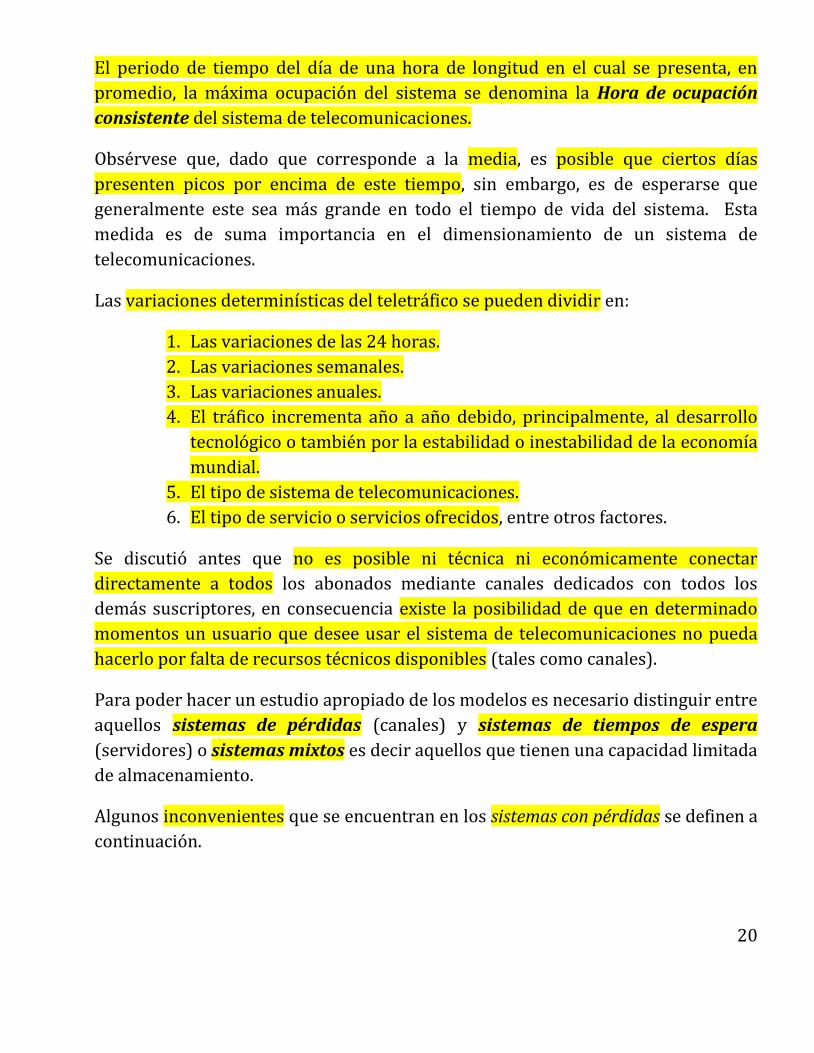
En un día completo de 24 horas también se pueden establecer patrones que pueden
ser modelados. La Figura 1—5 evidencia este hecho.
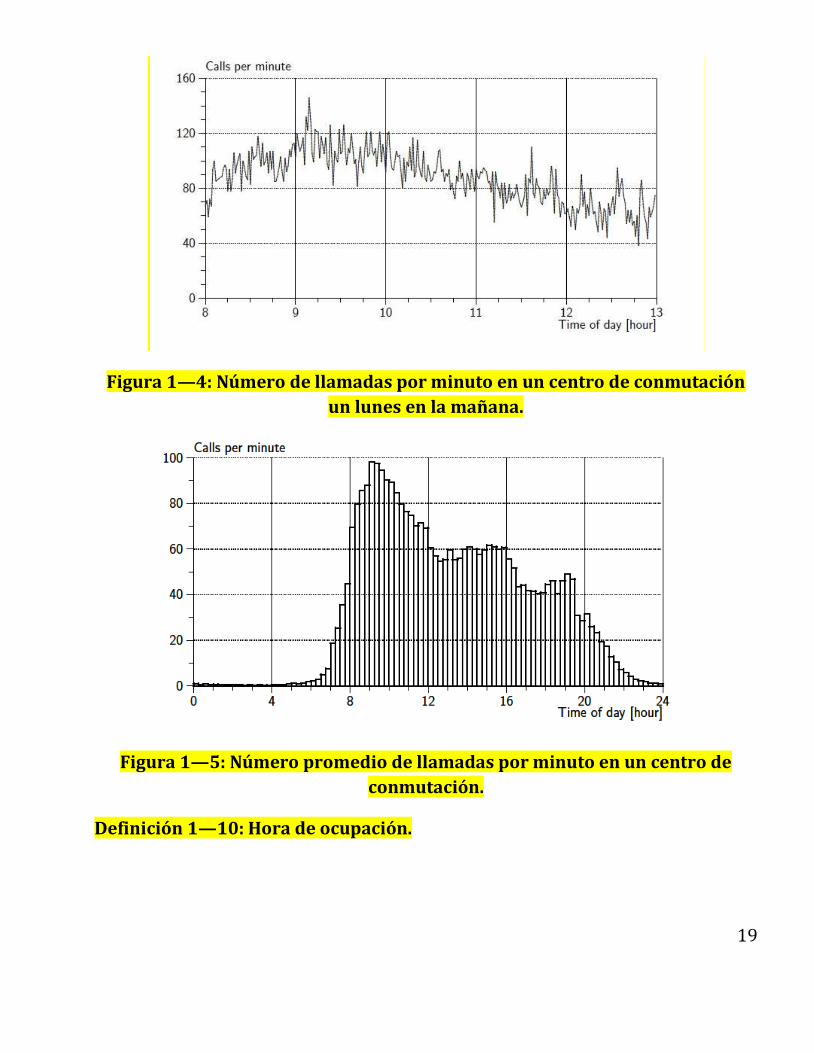
19
Figura 1—4: Número de llamadas por minuto en un centro de conmutación
un lunes en la mañana.
Figura 1—5: Número promedio de llamadas por minuto en un centro de
conmutación.
Definición 1—10: Hora de ocupación.
20
El periodo de tiempo del día de una hora de longitud en el cual se presenta, en
promedio, la máxima ocupación del sistema se denomina la Hora de ocupación
consistente del sistema de telecomunicaciones.
Obsérvese que, dado que corresponde a la media, es posible que ciertos días
presenten picos por encima de este tiempo, sin embargo, es de esperarse que
generalmente este sea más grande en todo el tiempo de vida del sistema. Esta
medida es de suma importancia en el dimensionamiento de un sistema de
telecomunicaciones.
Las variaciones determinísticas del teletráfico se pueden dividir en:
1. Las variaciones de las 24 horas.
2. Las variaciones semanales.
3. Las variaciones anuales.
4. El tráfico incrementa año a año debido, principalmente, al desarrollo
tecnológico o también por la estabilidad o inestabilidad de la economía
mundial.
5. El tipo de sistema de telecomunicaciones.
6. El tipo de servicio o servicios ofrecidos, entre otros factores.
Se discutió antes que no es posible ni técnica ni económicamente conectar
directamente a todos los abonados mediante canales dedicados con todos los
demás suscriptores, en consecuencia existe la posibilidad de que en determinado
momentos un usuario que desee usar el sistema de telecomunicaciones no pueda
hacerlo por falta de recursos técnicos disponibles (tales como canales).
Para poder hacer un estudio apropiado de los modelos es necesario distinguir entre
aquellos sistemas de pérdidas (canales) y sistemas de tiempos de espera
(servidores) o sistemas mixtos es decir aquellos que tienen una capacidad limitada
de almacenamiento.
Algunos inconvenientes que se encuentran en los sistemas con pérdidas se definen a
continuación.

21
Figura 1—6: Tiempo medio de ocupación de una línea troncal en función de
la hora del día.
Definición 1—11: Congestión de llamadas B.
Corresponde a la fracción de intentos de llamadas que encuentran el sistema
ocupado.
Definición 1—12: Tiempo de congestión E.
Se define como la fracción de tiempos en que los servidores se encuentran
ocupados.
Definición 1—13: Congestión de tráfico C.
Es la fracción del tráfico ofrecido que no es transportado.
Por su parte el principal inconveniente que se presenta en los sistemas con
retardos está en los tiempos de espera que causan por la necesidad de hacer fila
mientras que los servidores se desocupan.
22
1.6 MODELOS DE TRÁFICO
Existen varios modelos de tráfico que emplean el término Erlang. Son fórmulas que
se emplean para calcular cuantas líneas de enlace son precisas en un sistema de
telecomunicaciones. Por ejemplo, entre una central telefónica pequeña privada y
una central pública, o para calcular los enlaces entre centrales públicas. También se
emplea el término Erlang en la teoría de colas para estimar el número de personas
que hay que poner a trabajar en los centros de llamadas. Los principales modelos
de tráficos son los siguientes:
1.6.1 ERLANG B
Es el modelo más común se emplea para calcular cuantas líneas son precisas para
una cifra de tráfico (en Erlangs) determinada en la hora cargada. Este modelo
supone que las llamadas bloqueadas se liberan inmediatamente.
1.6.2 ERLANG B EXTENDIDO
Es similar al anterior, salvo que en este caso tiene en cuenta cual es el porcentaje de
llamadas bloqueadas (que reciben señal de ocupado) y se puede especificar el
porcentaje de reintentos.
1.6.3 ERLANG C
Este modelo supone que las llamadas bloqueadas permanecen a la espera hasta que
sean atendidas. Sirve, por ejemplo, para calcular las necesidades de personal de un
centro de llamadas, donde aquellas llamadas que no se pueden atender de
inmediato se ponen en cola.
1.7 RESUMEN DEL CAPÍTULO
En este capítulo se presentaron las principales definiciones utilizadas en un estudio
de teletráfico en redes de telecomunicaciones. Se discutió el concepto de Erlangs y
su rol en el dimensionamiento, la concepción, la implementación de sistemas de
telecomunicaciones. Se concluyó que aunque el tráfico en una red es de naturaleza
23
estocástica, existen patrones totalmente determinísticos que caracterizan a este
tipo de sistemas complejos.
24
2 COMPENDIO DE TEORÍA DE PROBABILIDADES
Pierre de Fermnat 1601 1665
Pierre Fermat, uno de los más influyentes matemáticos del siglo
XVII, nació en Beaumont de Lomagne, en Francia, el 17 de Agosto
de 1601, realizó estudios elementales en el colegio de los padres
franciscanos. Su padre, comerciante de cueros, después de haberle
dado una instrucción sólida adicional en su familia, le envió a
estudiar Derecho a Tolousse, disciplina de la cual se graduó en el
año de 1631. Allí pasó gran parte de su vida, ejerciendo Derecho. A
partir de 1631, sirvió en el Parlamento local, llegando a ser
consejero en 1634, finalmente murió en Castres en 1665. Fermat
tuvo una carrera apacible, caracterizada por un cuidado ejemplar
de hacer bien su tarea y, en sus momentos de ocio, supo crearse
ocupaciones literarias y apasionarse por las matemáticas. Fermat,
nunca mostró una inclinación hacia la escritura de libros más bien
practicó la comunicación con sus colegas vía cartas escritas. Su
intercambio de correspondencia, con otro grande como él llamado Pascal, marcó el punto de inicio
para el desarrollo de la teoría matemática de la probabilidad. Fermat comparte, junto con Descartes,
crédito por la invención de la geometría analítica, sin embargo, su máximo trabajo se ha reconocido
en Teoría de Números.
Fermat publicó rara vez sus descubrimientos, apenas algunas notas como apéndices a tratados
escritos por otros autores. Su gran inspirador fue Diofanto y su libro de Aritmética. Como trabajaba
para entretenerse, sus resultados más interesantes aparecen en los márgenes de estos tratados, y
desgraciadamente un gran número de sus trabajos se han perdido. Mantuvo correspondencia con
todos los científicos de su época; su reputación de matemático competente fue muy grande, y la
estima en la que se le tuvo fue general.
Pascal confesó que era aquél que tengo por el gran geómetra de toda Europa , y este personaje tan
atrayente, de un carácter constante, afable, poco susceptible, sin orgullo, contribuyó ampliamente a
la evolución de las matemáticas en campos tan variados como la geometría analítica, el cálculo
diferencial e integral, la teoría de números y la teoría de las probabilidades. Los principales escritos
de Pierre Fermat fueron publicados, después de su muerte, por su hijo mayor Clement-Samuel en
1679, bajo el título de Varia opera mathematica . Aunque esta publicación no encierra más que
una parte de su producción como matemático, basta por sí sola para clasificar al célebre habitante
de Tolousse como el más importante matemático francés del siglo XVII.
25
2.1 INTRODUCCIÓN
Azar4 Se habla de azar cuando las causas de un acontecimiento se
atribuyen a las leyes de la probabilidad, o en un sentido más
amplio, cuando las causas de ese acontecimiento se desconocen.
Aleatoriedad Se dice que un suceso es aleatorio cada vez que depende
únicamente de la suerte o del azar. Esto significa que cada posible
resultado tiene la misma posibilidad de resultar en la eventual
ejecución del experimento. A este hecho se le denomina
formalmente el principio de la razón insuficiente
Incertidumbre Se emplea este término cuando un suceso no tiene certidumbre,
es decir, que no es determinístico. Cada vez que un posible
resultado no haya sido cuantificado desde la óptica del azar se
dice que existe incertidumbre
2.2 ESPACIOS DE PROBABILIDAD
Para esta sección es necesario tener en cuenta que:
1. El objetivo es formular un modelo probabilístico que pueda ser usado
para describir eventos en el mundo real.
2. Es necesario superar los problemas que presentan las probabilidades a
priori y a posteriori, e intentar responder preguntas tales como ¿Cuál
es la probabilidad de que el tiempo entre llegadas de dos paquetes en
4 El concepto de azar es seguramente la idea clave en la construcción de la teoría que aquí se introduce. Una buena visión
de este concepto desde la literatura se puede encontrar en el cuento La lotería en Babilonia escrito por Jorge Luís Borges

26
una red de telecomunicaciones sea menor que 10 min.?
3. El modelo incluirá los resultados encontrados hasta el momento.
Definición 2—1: Experimento aleatorio
Un procedimiento que tiene la propiedad que al ser ejecutado bajo las mismas
condiciones puede arrojar diferentes resultados se denomina experimento
aleatorio.
Definición 2—2: Diseño experimental
A la infraestructura necesaria para la ejecución de un experimento aleatorio se le
denomina diseño experimental y se denota por la . Para garantizar el pleno
cumplimiento de los supuestos de la experimentación se requiere una organización
sistemática de los elementos que componen esa infraestructura. En otras palabras,
el diseño experimental alude al contexto en el cual se realizará el experimento
aleatorio.
Ejemplo 2—1: Algunos experimentos aleatorios en computación
Los experimentos aleatorios más empleados son, sin duda, aquellos relacionados
con los juegos de azar. Tal es el caso de, por ejemplo, 1 : El lanzamiento de dados, 2
: Extraer una carta de un naipe, 3 : Extraer una bola de una urna, etc. Sin embargo,
en ingeniería de la computación también los hay de sobra, algunos casos son, 4 : En
una red de computadores con bus compartido, el acceso al bus puede ser
considerado un experimento aleatorio, 5 : El número de correos que llegan a un
servidor, 6 : El número de conexiones que apuntan a una determinada página Web
en Internet, etc..
Lo más interesante es que a pesar de que el resultado de cada experimento es
incierto, la realización de un alto número de ellos puede predecirse.
Definición 2—3: Espacio Muestral
27
Es el conjunto de todos los posibles resultados de un experimento aleatorio. El
espacio muestral se denota por la letra , de esta manera, i i I
.
Observación 2—1
1. El conjunto puede ser discreto o continuo
2. Sus elementos se pueden escribir con tuplas.
3. Cada tupla puede escribirse como inji ,1,12,11,1 ,,,,,
Ejemplo 2—2
Los siguientes son casos típicos de espacios muestrales:
a. Si el experimento consiste en el lanzamiento de 2 monedas y
registrar el número de la cara de cada una de las monedas. Entonces
sscsccsc ,,,,,,, . Aquí, en particular, 3 ,s c y 2 2n
b. Si el experimento aleatorio consiste en registrar el número de
intentos que un computador debe realizar para acceder al bus
compartido en una red de computadores. Entonces 1,2,3,... .
c. Si el experimento consiste en registrar el tiempo del primer daño de
un computador nuevo. Entonces 0t t .
Definición 2—4: Evento A
En general, se dice que un evento A es un subconjunto de , el espacio muestral.
Cada evento se denota por una letra mayúscula.
Se dice que un evento A ocurrió, una vez se ejecute el experimento , cuando el
resultado obtenido i A .
Ejemplo 2—3: Monedas

28
En el caso del experimento que consiste en lanzar 2 monedas, los siguientes son
eventos válidos. A1: La primera moneda cae en cara, es decir ccscA ,,,1 ; A2:
Las dos monedas coinciden en su resultado, es decir ssccA ,,,2 .
Observación 2—2
1. No es discutible el hecho de que
y ,
.
Es decir, el conjunto vacío y su conjunto completo (espacio
muestral) también son eventos.
2. Por razones que se discutirán más adelante, a se le denomina el
evento imposible mientras que es el evento seguro.
Ejemplo 2—4
En el experimento de lanzar un dado de 6 cara numeradas de 1 a 6,
, , , , , y de esta manera 6m . Así
que el experimento cuenta con 6426 Eventos posibles.
Definición 2—5: Espacio de eventos
Se define como la colección, denotada por , de todos los posibles eventos de un
experimento aleatorio.
Matemáticamente hablando, la colección satisface los siguientes axiomas
(propiedades):
1. .
2. Si A entonces A .

29
3. Si 1 2, , , ,iA A A Entonces
+
i
i=1
A A
.
Cada vez que un conjunto de conjuntos cumple estos axiomas se dice que es
una algebra .
Ejemplo 2—5
Para algún experimento aleatorio con espacio de eventos , se tiene una
algebra .
Estas propiedades del espacio de eventos dan origen a una serie de resultados
interesantes.
Teorema 2—1
Si es una algebra entonces
Demostración
1. Por el primer axioma .
2. Por el segundo axioma .
3. Dado que , se sigue el resultado.
Teorema 2—2
Si 1 2, , , , ,i nA A A A Entonces
1.
1
n
i
i
A A
2.
1
n
i
i
B A
Demostración (Queda como ejercicio para el estudiante).
30
Definición 2—6: Función de probabilidad
Una función P cuyo conjunto de partida es el espacio de eventos y el de llegada el
intervalo 1,0 , es decir,
: 0,1P
A P A
de suerte que P cumple las propiedades:
1. 0AP para todo A .
2. 1P .
3. Si 1 2, , , nA A A con ji AA para ji . Entonces
n
i
i
n
i
i APAP11
.
De esta definición se desprenden los las siguientes propiedades:
Teorema 2—3: Complemento
Si A entonces A1A PP .
Demostración
1. AA
2. AA
3. AAAA PPPP
4. Dado que 1P el teorema queda demostrado.
Teorema 2—4: Probabilidad de la unión de eventos
Para cada dos eventos A y B , .P A B P A P B P AB Más general, para
eventos 1 2, , , nA A A
11
n n
i j i j
j i ji
P A P A P A A
31
1
1 21n
i j k n
i j k
P A A A P A A A
Demostración (de la primera parte se deja la segunda parte como ejercicio)
,A B A AB y ;A AB entonces
P A B P A P AB .P A P B P AB
Definición 2—7: Evento fundamental
A cada uno de los eventos conformados por un solo posible resultado se les
denomina eventos fundamentales. Matemáticamente i iA
En muchas situaciones se supone que 1
iP An
es decir, que los eventos
fundamentales son equiprobables. Sin embargo, el Ejemplo 2—16 y el Ejemplo 2—
6 muestran que no siempre los eventos fundamentales son equiprobales.
Ejemplo 2—6: Eventos fundamentales no equiprobables.
Sea un experimento aleatorio con n posibles resultados 1 2 , , n . Se sabe
que las probabilidades de los eventos fundamentales se comportan de tal manera
que el evento (fundamental) 1j ésimo es el doble de probable que el j ésimo .
Sea 2, , ,k kA ¿Cuál es la kP A ?
Para encontrar la respuesta, es necesario tener en consideración varios aspectos y
resultados importantes en el análisis.
1. Una serie 1t tX aX con condición de frontera 1X tiene una solución
general dada por la expresión 1
1
t
tX X a
2. Es importante recordar la serie geométrica finita.
1
0
1
1
nnj
j
rar a
r
32
3. Con esos resultados en mente, es claro que 1 2j jp p y, en
consecuencia, 1
12 j
jp p . La condición de frontera 1p puede
encontrarse con relativa facilidad teniendo en cuenta que 1
n
j
j
p
1
1
1
2n
j
j
p
1
1
0
2n
j
j
p
1
1 2
1 2
n
p
1 2 1np 1 . Por lo tanto, 1
1
2 1np
.
Este último resultado sugiere, entonces, que 12
2 1
j
j np
. Finalmente,
kP A 1
n
j
j
p
1
1
2
2 1
jk
nj
1
0
2
2 1
jk
nj
2 1
2 1
k
n
.
Definición 2—8: Espacio de probabilidad
El objeto matemático descrito por , , P en el que es el espacio muestral,
representa la álgebra de eventos y P la función de probabilidad, se
denomina espacio de probabilidad.
2.3 PRINCIPIOS FUNDAMENTALES DE LA TEORÍA DE LA MEDIDA
Definición 2—9: Una función de probabilidad de uso común
Una función particular que cumple las propiedades establecidas en la Definición
2—6 y que se constituye en la función más usada es
medida AP A
medida
.
Observación 2—3
Para espacios muestrales discretos la función de medida apropiada es el conteo,
es decir, el cardinal de los eventos involucrados medida A A ; mientras que para
espacios muestrales continuos se debe considerar la dimensión de cada posible
resultado experimental así:
1. 1 i i I
La medida apropiada es la longitud de eventos.
33
2. 1 2,i i I
La medida apropiada es el área de los eventos.
3. 1 2 3, ,i i I
La medida apropiada es el volumen de los eventos.
2.3.1 REGLAS DE LA MEDIDA CONTINUA
Tan importante como saber contar para espacios muestrales discretos, es recordar
algunas leyes generales del cálculo integral y diferencial para encontrar medidas en
espacios continuos. Dos ejemplos sencillos ilustran esta idea.
Ejemplo 2—7: Galois
En la ciudad de la Discreción los duelos son raramente fatales. Allí, cada
contrincante llega aleatoriamente entre las 5 a.m. y las 6 a.m. el día acordado y
espera exactamente 1 0,1 minutos (¡Honor servido!) a menos que su oponente
llegue en ese intervalo de tiempo (o haya llegado antes y lo esté esperando) caso en
el cual habrá pelea y uno de ellos morirá. ¿Cuál es la probabilidad de muerte?
Solución (Teórica) a priori:
1. iX : Hora de llegada del ésimoi duelista con 2,1i sin pérdida de
generalidad puede considerarse que 1,0iX y por lo tanto el espacio
muestral está dado por 1,02,12,1 xxxx y definiendo el evento A : los
dos duelistas se encuentran. entonces 1, 2 1, 2 1, 2 1, ,A x x x x x x
donde 1 , de ésta manera se pide calcular XF P A
2.
medida AP A
medida
Dado que el evento A es bidimensional continuo, la
medida apropiada es el área, entonces
área
AáreaAP
34
1X
2X
1
1
11
1
1
11
A
2 1 1x x
2 1 1x x
0
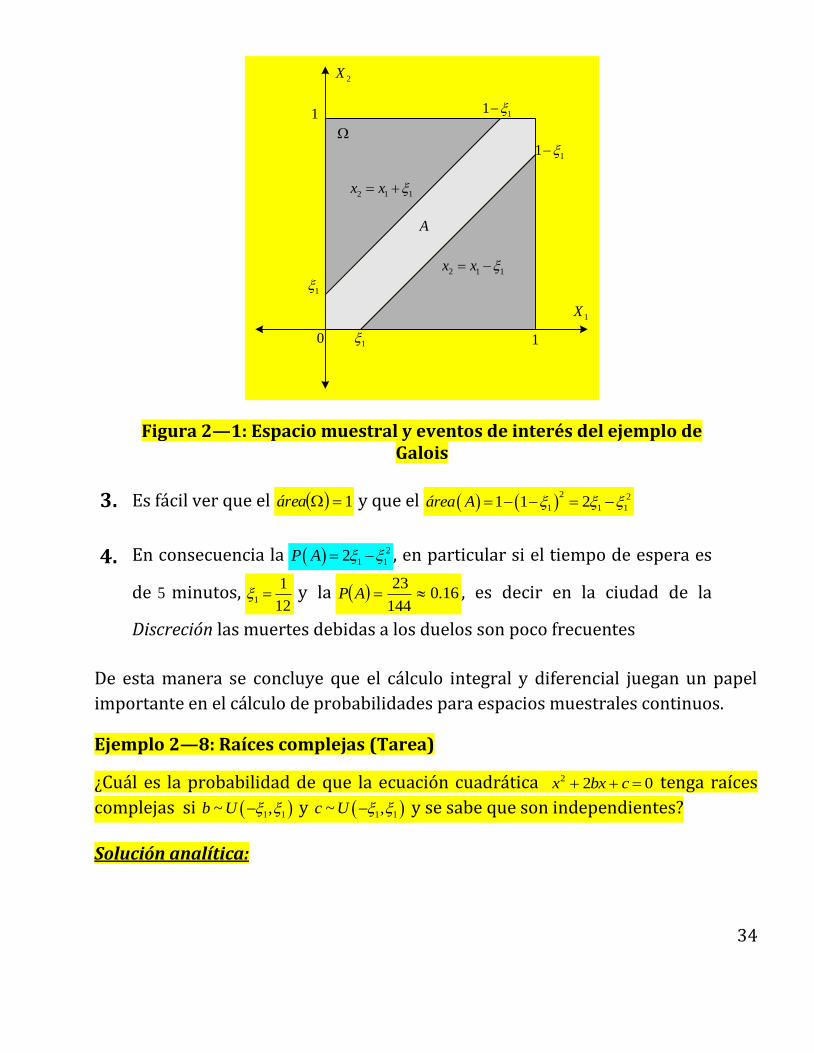
Figura 2—1: Espacio muestral y eventos de interés del ejemplo de Galois
3. Es fácil ver que el 1área y que el 2
11 1área A 2
1 12
4. En consecuencia la 2
1 12P A , en particular si el tiempo de espera es
de 5 minutos, 1
1
12 y la
144
23AP 16.0 , es decir en la ciudad de la
Discreción las muertes debidas a los duelos son poco frecuentes
De esta manera se concluye que el cálculo integral y diferencial juegan un papel
importante en el cálculo de probabilidades para espacios muestrales continuos.
Ejemplo 2—8: Raíces complejas (Tarea)
¿Cuál es la probabilidad de que la ecuación cuadrática 022 cbxx tenga raíces
complejas si 1 1~ ,b U y 1 1~ ,c U y se sabe que son independientes?
Solución analítica:

35
1. Un supuesto que no resulta cuestionable está en que el experimento
aleatorio es tal que 1 1~ ,b U y 1 1~ ,c U con 1 y b
independiente de c .
2. Dada la pareja cb, es claro que la ecuación generaría raíces complejas si
02 cb . Y, en consecuencia, la ecuación de la parábola 2bc determina
un límite entre las raíces reales y complejas.
3. Esta situación puede observarse en la representación cartesiana de la
Figura 2—2.
c
b
1
Raíces
Reales
Raíces
Complejas
2bc
1
1
1
1 1,
A
A
Figura 2—2: Espacio muestral y eventos de interés del ejemplo de las raíces
4. En consecuencia, definiendo el evento 22
1 1, | 0, , , ,A b c b c b c
36
así mismo, el espacio muestral esta dado por
1 2 1 2( , ) | , , , ,b c b c y por lo tanto )()( plejasRaíces comPAP
)(
)(
área
Aárea. Claramente,
1
1
2
1 1( ) 2área A b db
3
21
4
3 , mientras que
2
1( ) 4área , así que 1
1( )
3P A
.
5. En particular si 1 4 , entonces
1( )
6P A .
6. También es claro que
1 11
1( ) 0
3Lim P A Lim
Equivalente la
1
___
( ) ( ) 1P A P Raices reales
.
2.3.2 REGLAS DEL CONTEO
1. La actividad de contar es más complicada de lo que parece a simple
vista y requiere especial cuidado y seriedad en su tratamiento.
2. La Mayoría de los problemas en probabilidad son relativamente
sencillos de formular, pero generalmente, complicados de resolver.
En la Figura 2—3 se proponen dos factores importantes que deben tenerse en
cuenta cada vez que se lleva a cabo una actividad de conteo. Esos elementos clave
son las tareas (filas en el diagrama) y las etapas (columnas). El número de etapas
depende de la tarea, sin embargo es usual que sean constantes para toda tarea.
En un sentido amplio, las tareas son realizaciones en las que, de una manera
disyuntiva, puede realizarse el conteo. De esta manera se emplea el conectivo o,
mientras que se usa el y para las etapas.
37
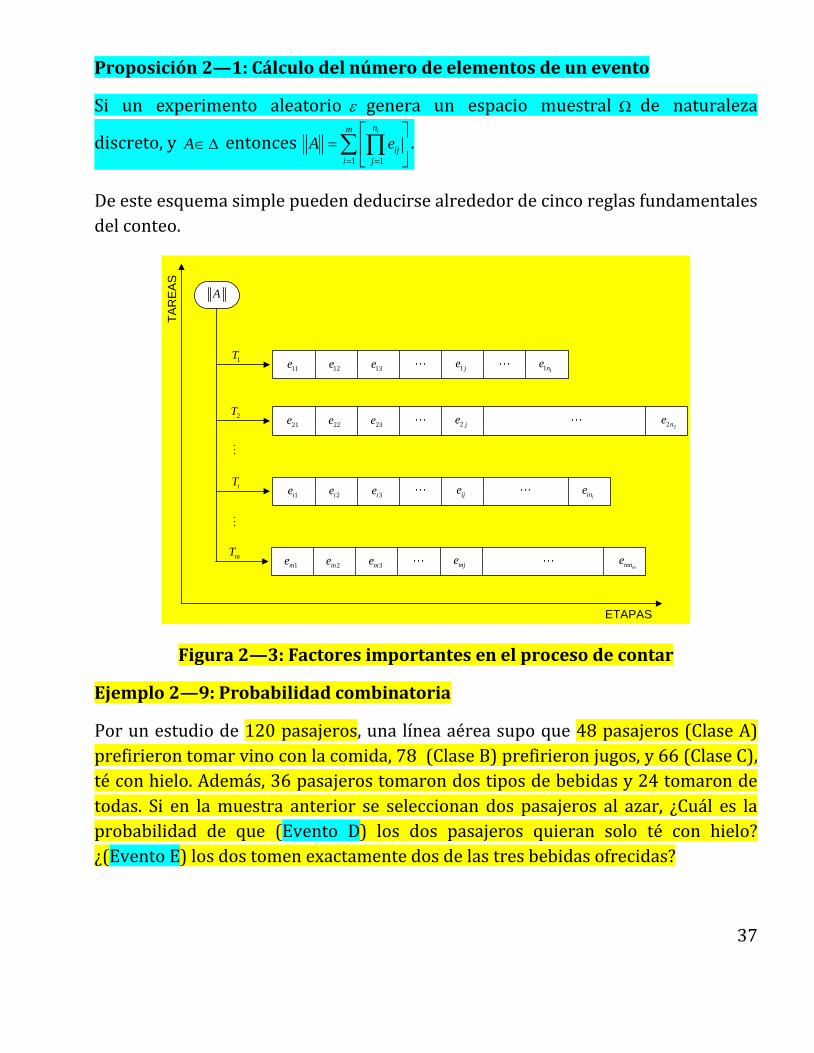
Proposición 2—1: Cálculo del número de elementos de un evento
Si un experimento aleatorio genera un espacio muestral de naturaleza
discreto, y A entonces A1 1
inm
ij
i j
e
.
De este esquema simple pueden deducirse alrededor de cinco reglas fundamentales
del conteo.
TA
RE
AS
ETAPAS
A
1T11ne
11e 12e 13e 1 je
2T22ne
21e 22e 23e 2 je
iTiine
1ie 2ie 3ie ije
mTmmne
1me 2me 3me mje
Figura 2—3: Factores importantes en el proceso de contar
Ejemplo 2—9: Probabilidad combinatoria
Por un estudio de 120 pasajeros, una línea aérea supo que 48 pasajeros (Clase A)
prefirieron tomar vino con la comida, 78 (Clase B) prefirieron jugos, y 66 (Clase C),
té con hielo. Además, 36 pasajeros tomaron dos tipos de bebidas y 24 tomaron de
todas. Si en la muestra anterior se seleccionan dos pasajeros al azar, ¿Cuál es la
probabilidad de que (Evento D) los dos pasajeros quieran solo té con hielo?
¿(Evento E) los dos tomen exactamente dos de las tres bebidas ofrecidas?
38
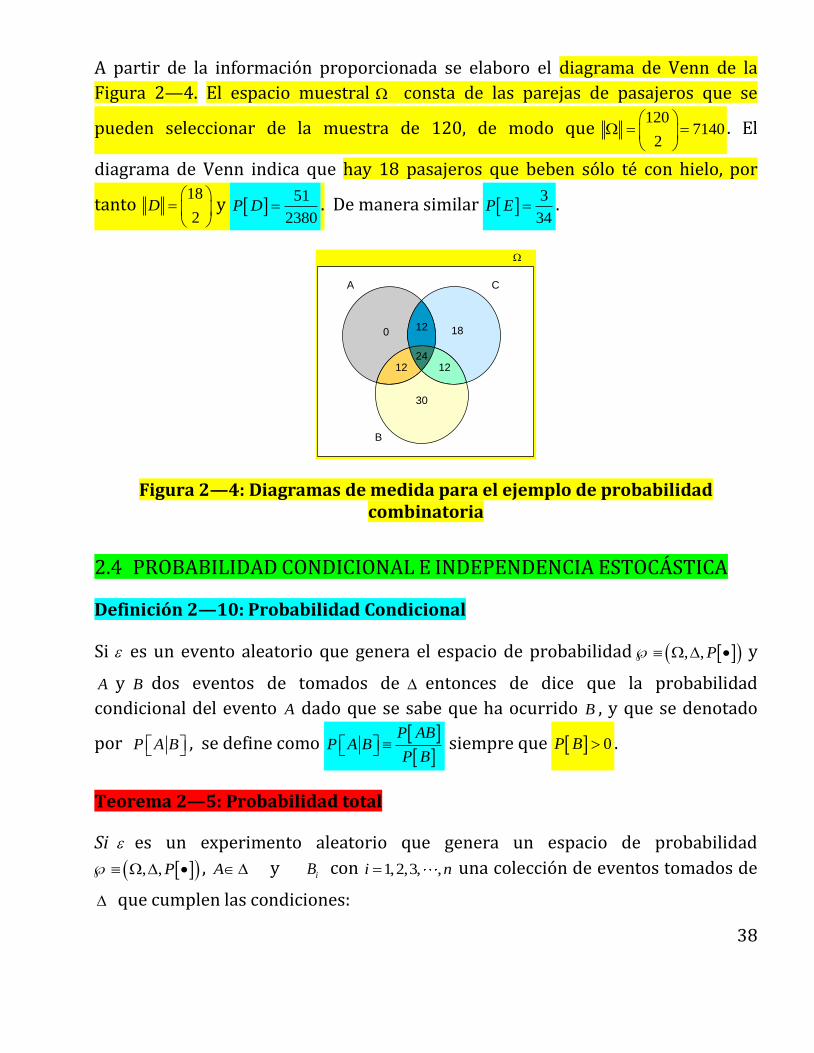
A partir de la información proporcionada se elaboro el diagrama de Venn de la
Figura 2—4. El espacio muestral consta de las parejas de pasajeros que se
pueden seleccionar de la muestra de 120, de modo que 120
71402
. El
diagrama de Venn indica que hay 18 pasajeros que beben sólo té con hielo, por
tanto 18
2D
y 51
2380P D . De manera similar
3
34P E .
24
12
30
180
1212
A C
B
Figura 2—4: Diagramas de medida para el ejemplo de probabilidad combinatoria
2.4 PROBABILIDAD CONDICIONAL E INDEPENDENCIA ESTOCÁSTICA
Definición 2—10: Probabilidad Condicional
Si es un evento aleatorio que genera el espacio de probabilidad , , P y
A y B dos eventos de tomados de entonces de dice que la probabilidad
condicional del evento A dado que se sabe que ha ocurrido B , y que se denotado
por P A B , se define como
P ABP A B
P B siempre que 0P B .
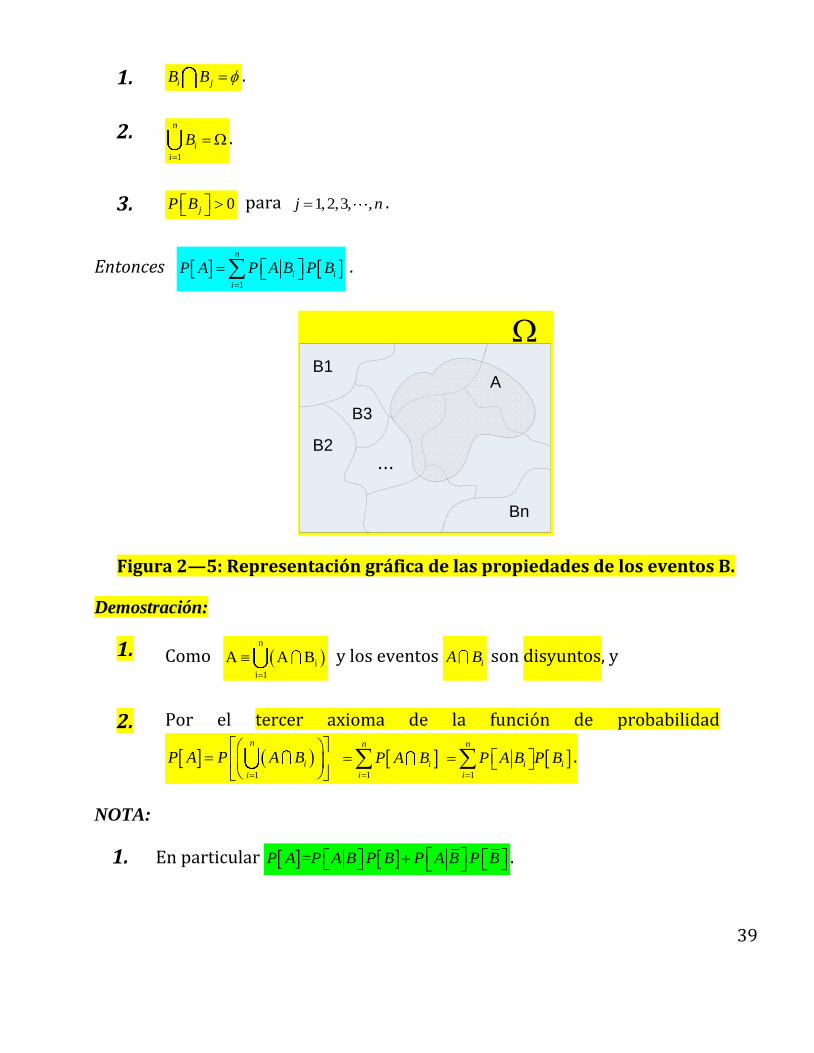
Teorema 2—5: Probabilidad total
Si es un experimento aleatorio que genera un espacio de probabilidad
, , P , A y iB con 1,2,3, ,i n una colección de eventos tomados de
que cumplen las condiciones:
39
1. i jB B .
2. 1
n
i
i
B
.
3. 0jP B para 1,2,3, ,j n .
Entonces 1
n
i i
i
P A P A B P B
.
B1
B2
B3
...
Bn
A
Figura 2—5: Representación gráfica de las propiedades de los eventos B.
Demostración:
1. Como n
i
i 1
A A B
y los eventos iA B son disyuntos, y
2. Por el tercer axioma de la función de probabilidad
1
n
i
i
P A P A B
1
n
i
i
P A B
1
n
i i
i
P A B P B
.
NOTA:
1. En particular =P A P A B P B P A B P B .
40
2. Un nombre generalmente aceptado para referirse a las probabilidades
condicionales que pueden calcularse con base en la información
disponible de la situación a resolver, es verosimilitudes del problema.
Ejemplo 2—10: Juego de Craps.
El juego de Craps se practica dejando que un jugador lance dos dados hasta que
gana o pierde, el jugador gana en el primer lanzamiento si tiene como total 7 u 11,
pierde en el primer lanzamiento si tiene un total de 2, 3 o 12, si el jugador obtiene
cualquier otro total en su primer lanzamiento, ese total se denomina su punto.
Continúa haciendo lanzamiento hasta que obtenga 7 o su punto. El jugador ganará
si obtiene su punto y pierde si obtiene 7. ¿Cuál es la probabilidad de ganar el juego?
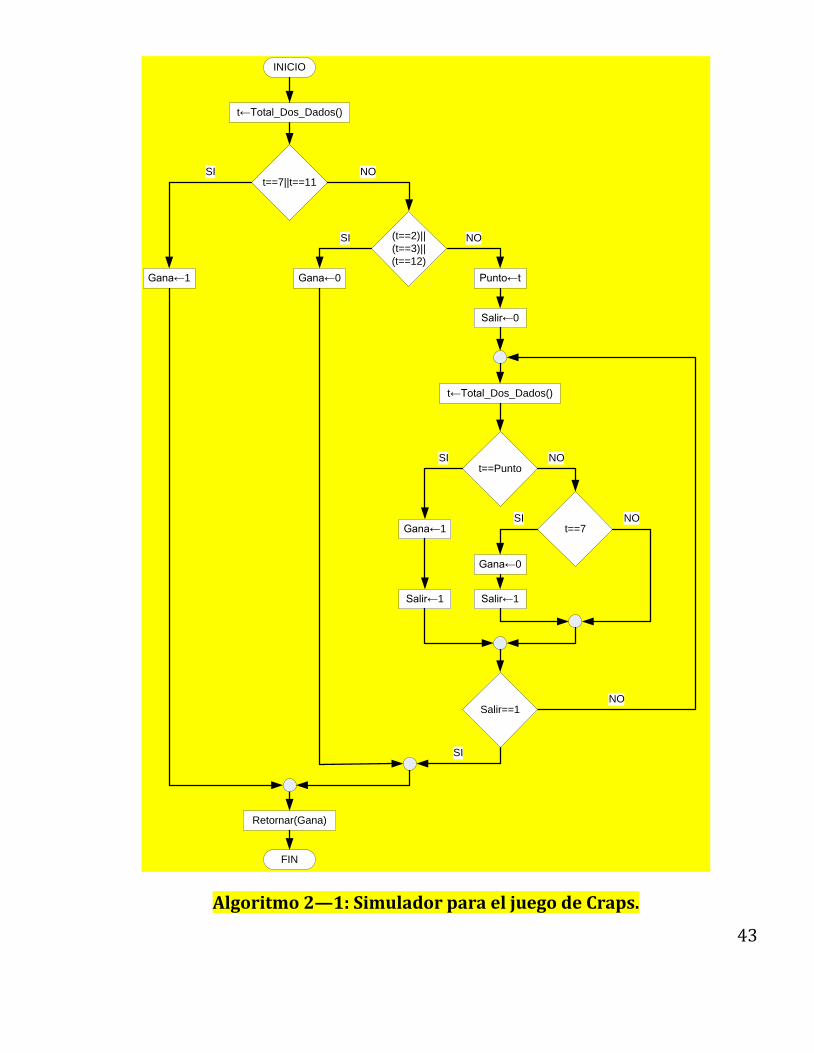
1. Algoritmo
Ver Algoritmo 2—1.
2. Solución analítica
1. Definiendo los eventos:
G: Ganar el juego.
C: Ganar el juego en el primer intento.
A: Ganar el juego después del primer intento.
Entonces la probabilidad de ganar el juego está dada por la expresión
APCPACPGP . A continuación se realiza un análisis detallado
para el cálculo de cada una de estas probabilidades.
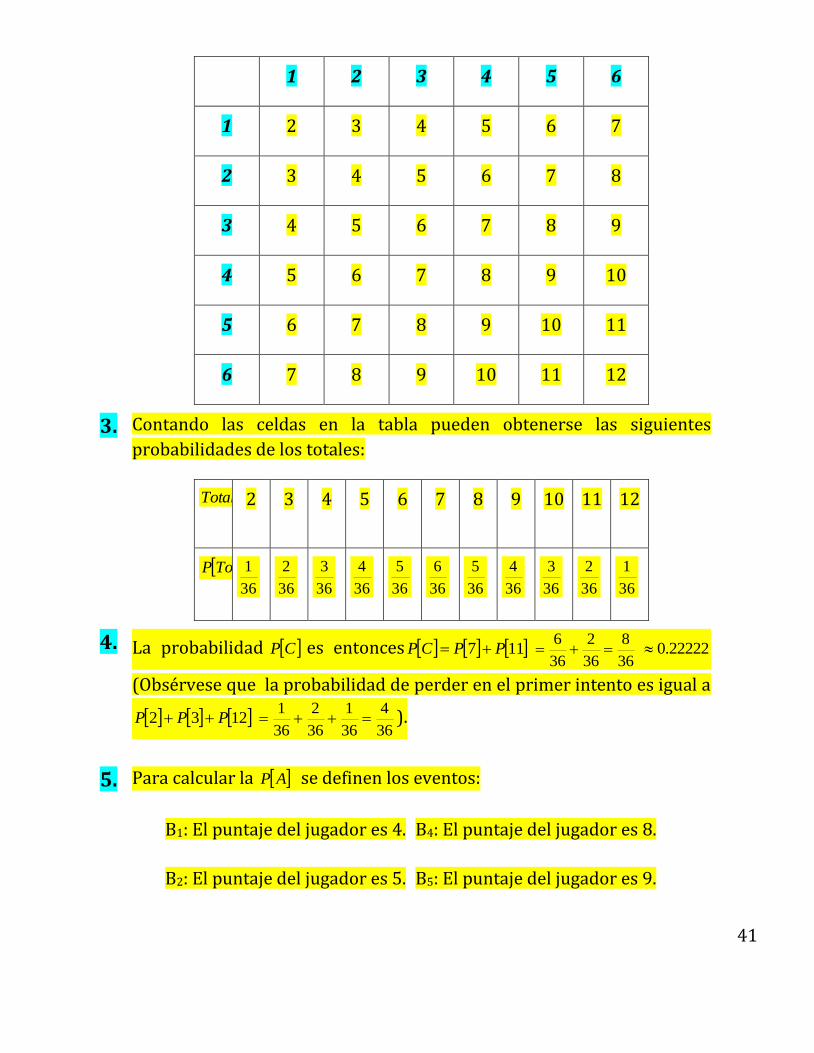
2. Primero deben calcularse las probabilidades asociadas con los totales
del experimento aleatorio. Debe notarse que hay 3666 posibles
resultados igualmente probables que se muestran en la tabla que sigue.
En esta tabla cada fila indica el resultado del dado uno mientras las
columnas representan el resultado del dado dos.
41
1 2 3 4 5 6
1 2 3 4 5 6 7
2 3 4 5 6 7 8
3 4 5 6 7 8 9
4 5 6 7 8 9 10
5 6 7 8 9 10 11
6 7 8 9 10 11 12
3. Contando las celdas en la tabla pueden obtenerse las siguientes
probabilidades de los totales:
Total
2 3 4 5 6 7 8 9 10 11 12
TotalP
36
1
36
2
36
3
36
4
36
5
36
6
36
5
36
4
36
3
36
2
36
1
4. La probabilidad CP es entonces 117 PPCP 36
8
36
2
36
6 22222.0
(Obsérvese que la probabilidad de perder en el primer intento es igual a
1232 PPP 36
4
36
1
36
2
36
1 ).
5. Para calcular la AP se definen los eventos:
B1: El puntaje del jugador es 4. B4: El puntaje del jugador es 8.
B2: El puntaje del jugador es 5. B5: El puntaje del jugador es 9.
42
B3: El puntaje del jugador es 6. B6: El puntaje del jugador es 10.
Observe que de la tabla de probabilidades del total (dada previamente)
es claro que, por ejemplo, 36
45 BP .
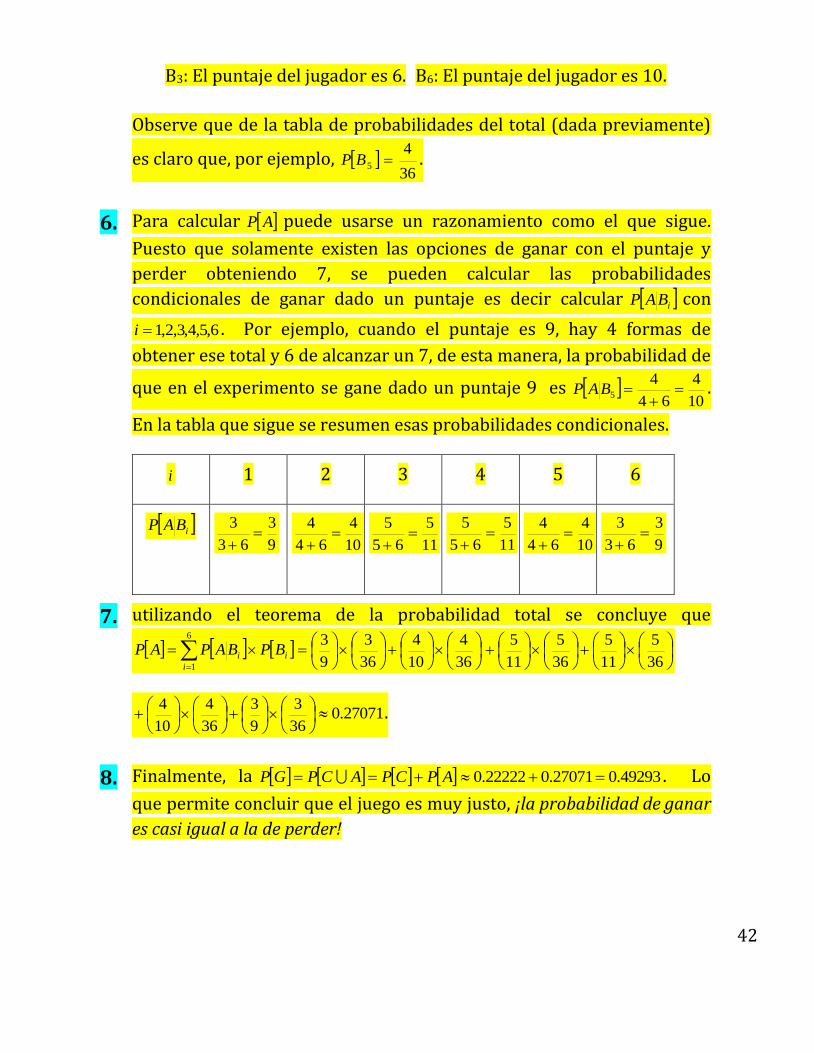
6. Para calcular AP puede usarse un razonamiento como el que sigue.
Puesto que solamente existen las opciones de ganar con el puntaje y
perder obteniendo 7, se pueden calcular las probabilidades
condicionales de ganar dado un puntaje es decir calcular iBAP con
6,5,4,3,2,1i . Por ejemplo, cuando el puntaje es 9, hay 4 formas de
obtener ese total y 6 de alcanzar un 7, de esta manera, la probabilidad de
que en el experimento se gane dado un puntaje 9 es 10
4
64
45
BAP .
En la tabla que sigue se resumen esas probabilidades condicionales.
i 1 2 3 4 5 6
iBAP 9
3
63
3
10
4
64
4
11
5
65
5
11
5
65
5
10
4
64
4
9
3
63
3
7. utilizando el teorema de la probabilidad total se concluye que
6
1i
ii BPBAPAP
36
4
10
4
36
3
9
3
36
5
11
5
36
5
11
5
36
3
9
3
36
4
10
427071.0 .
8. Finalmente, la APCPACPGP 49293.027071.022222.0 . Lo
que permite concluir que el juego es muy justo, ¡la probabilidad de ganar
es casi igual a la de perder!
43
FIN
Gana←1 Punto←t
(t==2)||
(t==3)||
(t==12)
Salir←0
Gana←0
t←Total_Dos_Dados()
Gana←1
Salir←1
Gana←0
Salir←1
Retornar(Gana)
NO
SI NO
SI
SI
SI
NO
INICIO
t←Total_Dos_Dados()
t==7||t==11
t==Punto
Salir==1
t==7NO
SI NO
Algoritmo 2—1: Simulador para el juego de Craps.
44
Teorema 2—6: Bayes
Si es un experimento aleatorio que genera un espacio de probabilidad
, , P , A , 0P A y iB con 1,2,3, ,i n una colección de eventos
tomados de que cumplen las condiciones:
1. i jB B .
2. 1
n
i
i
B
.
3. 0jP B para 1,2,3, ,j n .
Entonces
1
k k
k n
i i
i
P A B P BP B A
P A B P B
.
Demostración:
1. Con base en la definición de probabilidad condicional
[ ]
k
k
P B AP B A
P A .
2. También es claro que kP B A k kP A B P B .
3. Por el teorema de la probabilidad total es claro que
1
n
i i
i
P A P A B P B
con lo cual queda demostrado el teorema de
Bayes.
NOTA:
1. En particular [ | ]P B A
| |
P A B P B
P A B P B P A B P B
.
45
2. Sin duda, el teorema de Bayes se constituye en uno de los resultados
más frecuentemente empleado en el modelamiento de sistemas
computacionales. Una sola aplicación corrobora esta afirmación: las
denominadas redes Bayesianas, empleadas en la construcción de
sistemas inteligentes, es un caso representativo.
Ejemplo 2—11: Transmisión satelital.
Un satélite del clima está enviando un código binario de 0’s y 1’s describiendo el
desarrollo de una tormenta tropical. El ruido en el canal puede esperarse que
introduzca cierta cantidad de errores de transmisión. Suponga que el mensaje que
esta siendo transmitido está compuesto en un 70% de 0’s y existe un 80%de
probabilidad de que un 0 o 1 enviados sean recibido correctamente. Si un “1” es
recibido, ¿Cuál es la probabilidad que un “0” haya sido enviado?
Solución:
Definiendo los eventos iB “Un i fue enviado,” 0,1,i y definiendo el evento iA como
“Un i fue recibido”, se desea encontrar la 0 1P B A . Asimismo, de acuerdo con los
datos, es fácil verificar que: 0 0.7P B , 1 0.3P B , 0 0 0.8P A B ,
1 0 0.2P A B ,
1 1 0.8P A B , y que 0 1 0.2P A B . En consecuencia, la probabilidad de un 0
habiendo sido enviado dado que 1 fue recibido es 0 1P B A
1 0 0
1 0 0 1 1 1
P A B P B
P A B P B P A B P B
0.2 0.7
0.2 0.7 0.8 0.3
0.37
Definición 2—11: Eventos independientes
Sea un experimento aleatorio que genera un espacio de probabilidad
, , P , A y B dos eventos tomados de , Entonces se dice que A es
independiente de B si y sólo si
1. ]P[B*P[A]P[AB]
46
2. P[A]B]|P[A Si P[B] > 0
3. P[B]A]|P[B Si P[A] > 0.
2.5 VECTOR ALEATORIO Y FUNCIÓN DE DISTRIBUCIÓN CONJUNTA
2.5.1 INTRODUCCIÓN
Definición 2—12: Función indicadora
La función
: 0,1
A
I
I
de forma que
1 Si
0 Si A
AI
A
se denomina función
indicadora.
2.5.2 DEFINICIONES
Definición 2—13: Variables aleatorias
Dado un espacio de probabilidad , , P , asociado con un experimento
aleatorio , se define variable aleatoria a una función X cuyo dominio es el espacio
muestral y su recorrido los números reales R . Es decir, X
RX
:.
NOTAS
1. Se emplean siempre letras mayúsculas para denotar a cada una
de las variables aleatorias.
2. Si los posibles valores de la variable aleatoria es un número
finito o contablemente infinito se dice que la variable aleatoria es
discreta.
3. Si los posibles valores de la variable aleatoria pertenecen a un
intervalo de los números reales se dice que la variable aleatoria
es continua.
47
Definición 2—14: Vector aleatorio
Dado un espacio de probabilidad , , P , asociado con un experimento
aleatorio , se define a un conjunto de n variables aleatorias 1 2, , , nX X X X para
las cuales 1 2, , , nx x x x , representa un conjunto de valores determinados se le
denomina vector aleatorio.
Definición 2—15: Distribución conjunta
la Distribución Conjunta para un vector aleatorio se define como
1 2, , , 1 2 1 1 2 2, ,..., P , ,...,
nX X X n n nF x x x X x X x X x (1— 1)
2.6 FUNCIONES DE DENSIDAD CONJUNTAS
2.6.1 VECTORES ALEATORIOS DISCRETOS
Definición 2—16: Densidad conjunta discreta
La función de densidad conjunta discreta se define como:
1 2, , , 1 2 1 1 2 2, ,..., P , ,...,
nX X X n n nf x x x X x X x X x (1— 2)
Las condiciones que 1 2, , , 1 2, ,...,
nX X X nf x x x debe satisfacer son:
1. 1 2, , , 1 2, ,..., 0,1
nX X X nf x x x para ix para todo i
2. 1 2
1
, , , 1 2, ,..., 1n
n
X X X n
x x
f x x x
Ejemplo 2—12: Familia multinomial.
Un experimento aleatorio con espacio muestral 1 2 1, , , k , con i ip P así
que 1
1
1k
i
i
p
. Si se realizan n ensayos independientes y se define el vector aleatorio

48
1 2 1, , , kX X X X con iX definido como el número de veces que apareció
i . Se
puede verificar que 1 2 1
1
, , , 1 2 1 11
1
!, , ,
!
i
k
kx
X X X k iki
i
i
nf x x x p
x
donde 0,1, ,ix n y 1
1
k
i
i
x n
.
2.6.2 VECTORES ALEATORIOS CONTINUOS
Definición 2—17: Densidad conjunta continua
La función de densidad está dada por:
1 2 1 2, , , 1 2 , , , 1 2
1 2
, ,..., , ,...,...n n
n
X X X n X X X n
n
f x x x F x x xx x x
(1— 3)
Las condiciones que 1 2, , , 1 2, ,...,
nX X X nf x x x debe satisfacer son:
1. 0,...,, 21 nxxxf para ix para todo i
2. 1...,...,,... 2121
nn dxdxdxxxxf
2.6.3 OTRAS CLASES DE VECTORES ALEATORIOS
Definición 2—18: Vector aleatorio mixto
Dado un espacio de probabilidad , , P , asociado con un experimento
aleatorio , se dice que el vector aleatorio 1 2, , , nX X X X es mixto cuando
algunas de sus variables son continuas y las restantes discretas.
49
2.7 DISTRIBUCIONES CONDICIONALES E INDEPENDENCIA
ESTOCÁSTICA
2.7.1 VECTORES ALEATORIOS CONTINUOS
2.7.1.1 Distribuciones Marginales
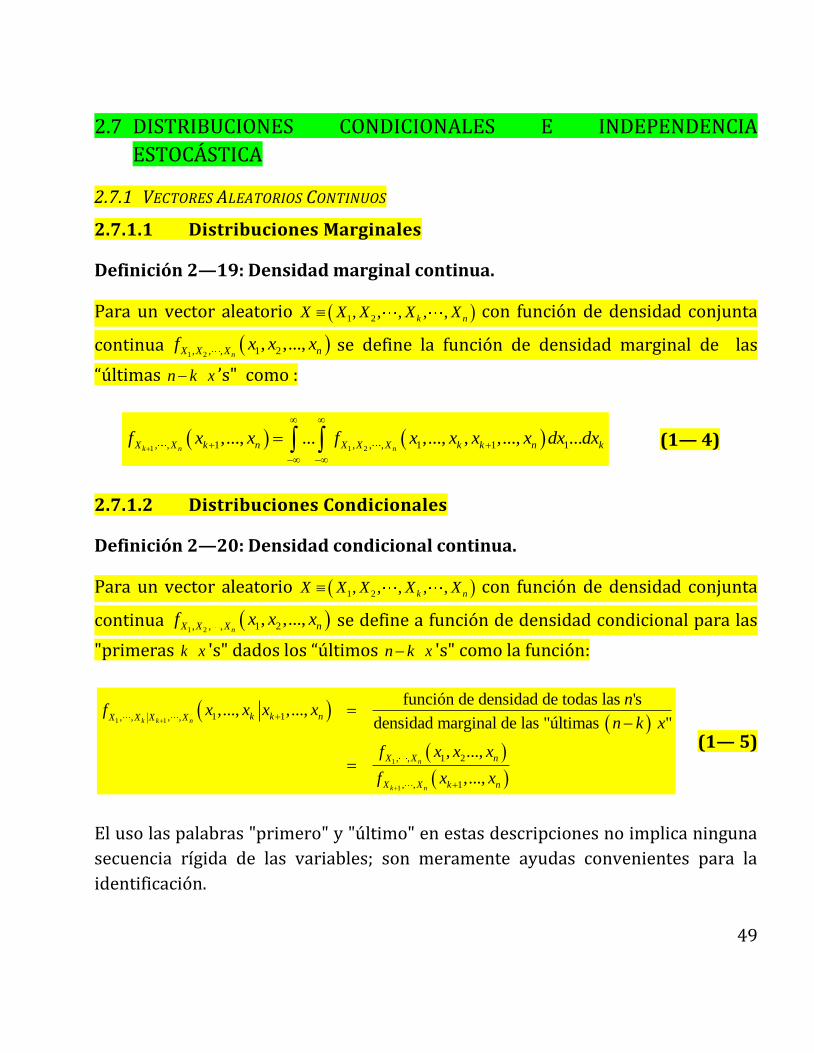
Definición 2—19: Densidad marginal continua.
Para un vector aleatorio 1 2, , , , ,k nX X X X X con función de densidad conjunta
continua 1 2, , , 1 2, ,...,
nX X X nf x x x se define la función de densidad marginal de las
“últimas kn x ’s" como :
1 1 2, , 1 , , , 1 1 1,..., ... ,..., , ,..., ...
k n nX X k n X X X k k n kf x x f x x x x dx dx
(1— 4)
2.7.1.2 Distribuciones Condicionales
Definición 2—20: Densidad condicional continua.
Para un vector aleatorio 1 2, , , , ,k nX X X X X con función de densidad conjunta
continua 1 2, , , 1 2, ,...,
nX X X nf x x x se define a función de densidad condicional para las
"primeras k x 's" dados los “últimos kn x 's" como la función:
1 1
1
1
1 1, , , ,
, , 1 2
, , 1
función de densidad de todas las 's,..., ,...,
densidad marginal de las "últimas "
, ...,
,...,
k k n
n
k n
k k nX X X X
X X n
X X k n
nf x x x x
n k x
f x x x
f x x
(1— 5)
El uso las palabras "primero" y "último" en estas descripciones no implica ninguna
secuencia rígida de las variables; son meramente ayudas convenientes para la
identificación.
50
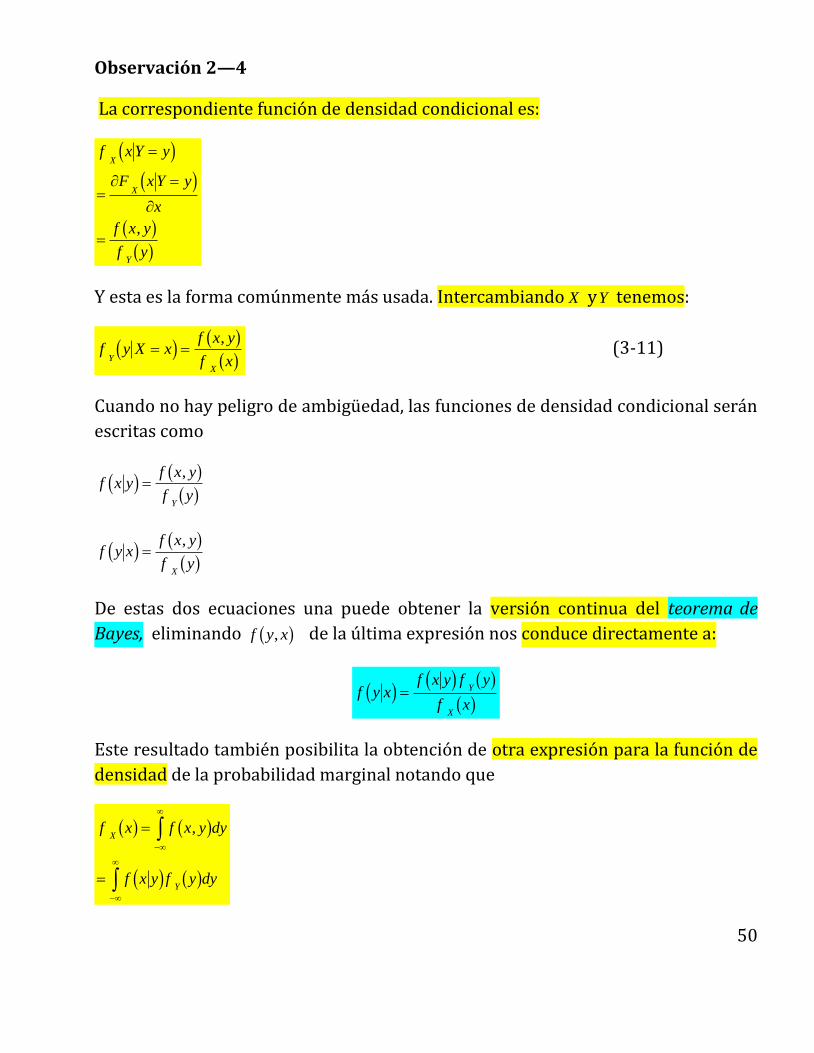
Observación 2—4
La correspondiente función de densidad condicional es:
f x Y y
F x Y y
x
f x y
f y
X
X
Y
c hc h
b gb g,
Y esta es la forma comúnmente más usada. Intercambiando X yY tenemos:
f y X xf x y
f xY
X
c h b gb g,
(3-11)
Cuando no hay peligro de ambigüedad, las funciones de densidad condicional serán
escritas como
f x yf x y
f yY
c h b gb g,
f y xf x y
f yX
c h b gb g,
De estas dos ecuaciones una puede obtener la versión continua del teorema de
Bayes, eliminando f y x,b g de la última expresión nos conduce directamente a:
f y xf x y f y
f x
Y
X
c h c h b gb g
Este resultado también posibilita la obtención de otra expresión para la función de
densidad de la probabilidad marginal notando que
f x f x y dy
f x y f y dy
X
Y
b g b g
c h b g
zz
,
51
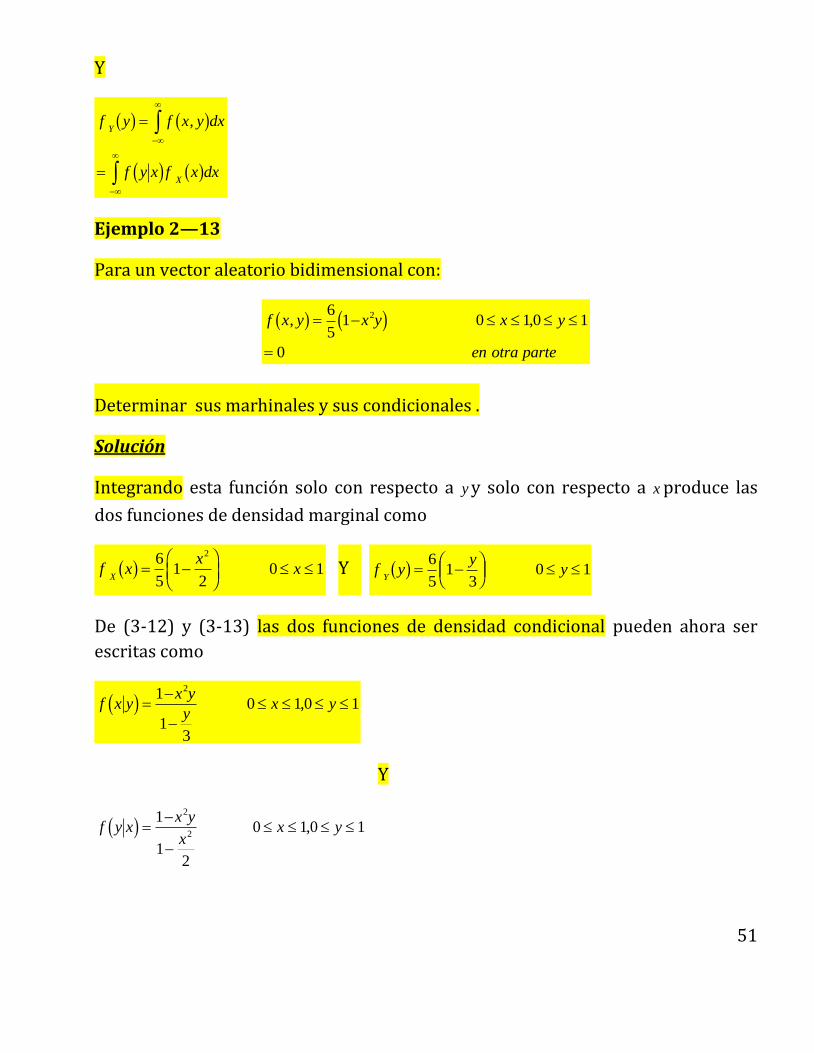
Y
f y f x y dx
f y x f x dx
Y
X
b g b g
c h b g
zz
,
Ejemplo 2—13
Para un vector aleatorio bidimensional con:
f x y x y x y
en otra parte
, ,b g c h
6
51 0 1 0 1
0
2
Determinar sus marhinales y sus condicionales .
Solución
Integrando esta función solo con respecto a y y solo con respecto a x produce las
dos funciones de densidad marginal como
f xx
xXb g FHGIKJ
6
51
20 1
2
Y f y
yy
Yb g FHGIKJ
6
51
30 1
De (3-12) y (3-13) las dos funciones de densidad condicional pueden ahora ser
escritas como
f x yx y
yx yc h
1
13
0 1 0 12
,
Y
f y xx y
xx yc h
1
12
0 1 0 12
2,
52
2.7.2 VECTORES ALEATORIOS DISCRETOS
2.7.2.1 Distribuciones Marginales
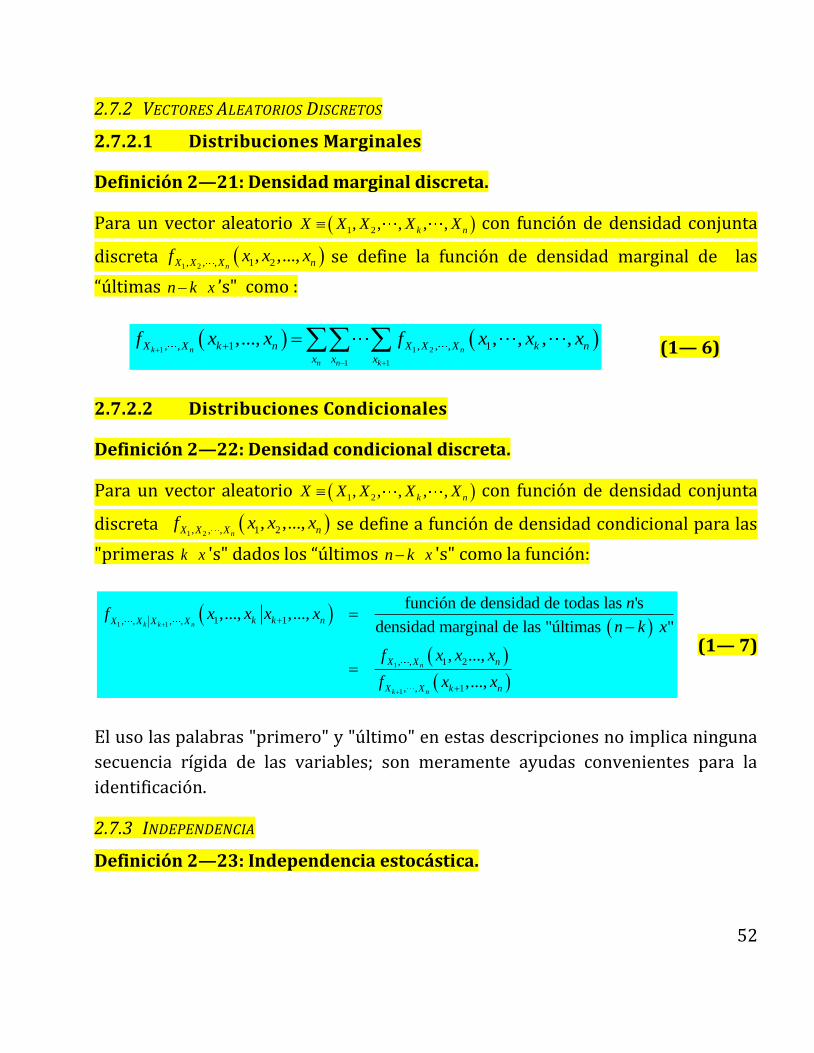
Definición 2—21: Densidad marginal discreta.
Para un vector aleatorio 1 2, , , , ,k nX X X X X con función de densidad conjunta
discreta 1 2, , , 1 2, ,...,
nX X X nf x x x se define la función de densidad marginal de las
“últimas kn x ’s" como :
1 1 2
1 1
, , 1 , , , 1,..., , , , ,k n n
n n k
X X k n X X X k n
x x x
f x x f x x x
(1— 6)
2.7.2.2 Distribuciones Condicionales
Definición 2—22: Densidad condicional discreta.
Para un vector aleatorio 1 2, , , , ,k nX X X X X con función de densidad conjunta
discreta 1 2, , , 1 2, ,...,
nX X X nf x x x se define a función de densidad condicional para las
"primeras k x 's" dados los “últimos kn x 's" como la función:
(1— 7)
El uso las palabras "primero" y "último" en estas descripciones no implica ninguna
secuencia rígida de las variables; son meramente ayudas convenientes para la
identificación.
2.7.3 INDEPENDENCIA
Definición 2—23: Independencia estocástica.
1 1
1
1
1 1, , , ,
, , 1 2
, , 1
función de densidad de todas las 's,..., ,...,
densidad marginal de las "últimas "
, ...,
,...,
k k n
n
k n
k k nX X X X
X X n
X X k n
nf x x x x
n k x
f x x x
f x x

53
Un vector aleatorio 1 2, , , , ,k nX X X X X , bien sea discreto o continuo, denomina
estocásticamente independiente cuando 1 2, , , 1 2
1
, ,...,n i
n
X X X n X i
i
f x x x f x
, o
bien, 1 2, , , 1 2
1
, ,...,n i
n
X X X n X i
i
F x x x F x
.
2.8 ESPERANZA MATEMÁTICA Y MOMENTOS
2.8.1 VALOR ESPERADO DE FUNCIONES DE VARIABLES ALEATORIAS
Definición 2—24: Esperanza matemática de una función.
Para un vector aleatorio 1 2, , , , ,k nX X X X X con función de densidad conjunta
1 2, , , 1 2, ,...,
nX X X nf x x x y se define la esperanza matemática de una funcuón
: ng como:
1 2
1 1
1 2
1 , , , 1
1 1
1 , , , 1 1 2
, , , , , , , ,
, , ,
, , , , , , , ,
n
n n k
n
k n X X X k n
x x x
n
k n X X X k n n
g x x x f x x x Discreto
E g X X X
g x x x f x x x dx dx dx Continuo
Teorema 2—7: Chebyshev
Sea xfX X~ , :g una función no negativa y 0k Entonces
E g x
P g x kk
Demostración:
1. E g x
dxxfxg x
54
kxgx
xx
kxgx
dxxfxgdxxfxg::
dxxfxg x
kxgx
:
dxxfk x
kxgx
:
kP g x k
2. Finalmente dividiendo entre k se sigue el resultado.
NOTAS:
Observación 2—5
1. Es claro que ¡Error! No se pueden crear objetos modificando
códigos de campo..
2. Es fácil ver que:
1
E g XP g X k
k
2.8.2 MOMENTOS
Definición 2—25: Momentos alrededor de cero.
El k -ésimo momento en cero de la i -ésima variable es k
iE X , el valor esperado de
la k -ésima potencia de ix :
55
i
i
i
i
k
i X i ik k
X ik
i X i
x
x f x dx Si X es continuo
E X
x f x Si X es discreto
y sustituyendo de (1— 4) para iX if x resulta en
1 2
1 2
, , , 1 2 1 2
, , , 1 2
... , ,..., ...
, ,...,
n
i
n
n n
k
i X X X n nk
Xk
i X X X n
x x
x f x x x dx dx dx Si X Continuo
x f x x x Si X Discreto
(1— 8)
Observación 2—6
1. En particular, cuando 1n , el exponente k normalmente se omite y i se
escribe en lugar de 1
i .
2. El vector de medias que corresponde a 1 2, , , nX X X X es
1 2, , , , ,j nE X .
Definición 2—26: Momentos alrededor de una constante.
Definición 2—27: Covarianza.
La covarianza entre las i -ésima y la j -ésima variables para ji es
ij i i j jE X X , (1— 9)
Observación 2—7
Se dice que las variables iX y jX son no correlacionadas cuando 0ij .
Definición 2—28: Varianza.
La varianza de la i -ésima variable es
56
22
i i iE X (1— 10)
Definición 2—29: Matriz de Varianzas–Covarianzas.
Las varianzas y covarianzas entre las variables en el vector 1 2, , , nX X X X
están dadas por (1— 9) y (1— 10). Organizando estas varianzas y covarianzas
como elementos de una matriz se obtiene la matriz de varianza-covarianza de X como:
var ijX V para , 1,2, ,i j n
Observación 2—8
1. Los elementos diagonales de V son las varianzas y los elementos que no están
en la diagonal son las covarianzas.
2. La varianza de una variable aleatoria escalar iX se escribirá como iv X ,
|considerando que la matriz de varianza-covarianza V de un vector de
variables aleatorias 1 2, , , nX X X X se denotará como var X .
2.8.3 COVARIANZA Y COEFICIENTE DE CORRELACIÓN
Definición 2—30: Matriz de correlación R.
La correlación entre la i -ésima y la j -ésima variables se define como ij
ij
i j
, la
matriz de correlación es
1 1ij
i j i j
R D VD
para nji ,...,1, (1— 11)
Observación 2—9
57
1. Donde las D son las matrices diagonales con los elementos 1
ipara
1,2, ,i n .
2. Claramente los elementos diagonales de R son todos la unidad, y R es
simétrica.
3. La matriz V es definida no negativa.
2.8.4 FUNCIONES GENERADORAS DE MOMENTOS
Definición 2—31: Función generadora de momentos.
Dado un vector aleatorio 1 2, , , nX X X X con función de densidad conjunta
1 2, , , 1 2, ,...,
nX X X nf x x x , se define la función generadora de momentos (f.g.m.) de la
densidad conjunta para un vector de parámetros 1 2, , , , ,j nt t t t t :
1 1 2 2 ... n nt x t x t x t x
XM t E e E e (1— 12)
Y la f.g.m. de una función escalar : ng de los elementos de 1 2, , , nX X X X ,
como:
g X t
g XM t E e
(1— 13)
2.8.5 ESPERANZA E INDEPENDENCIA
Teorema 2—8: Independencia.
Si 1 2, , , nX X X X es un vector aleatorio conformado por variables aleatorias
independientes y sean : n
ig un conjunto de m funciones de valor real
entonces 1 1
m m
i i
i i
E g X E g X
.
Demostración: Se deja como ejercicio.

58
2.9 TRANSFORMACIONES
Es natural requerir el cálculo de alguna estructura probabilística conjunta de
muchas variables aleatorias que se obtienen como funciones de otro conjunto
dado de variables aleatorias del que se conoce su comportamiento probabilístico.
2.9.1 CASO UNIVARIADO
Se presenta a continuación un resumen de algunos resultados de uso frecuente en
los casos continuo y discreto. No se incluyen las demostraciones puesto que, al
final del capitulo se extienden los resultados y se incluyen las demostraciones más
importantes.
2.9.1.1 Transformación lineal univariada
Teorema 2—9
Si ~ XX f x , 0a y b constantes reales y definiendo Y aX b entonces
Y X
y bf y f
a
cuando X es discreta o bien
1Y X
y bf y f
a a
cuando X es
continua.
2.9.1.2 Suma de dos variables aleatorias
Teorema 2—10
Si 11 ~ XX f x y
22 ~ XX f x independientes y definiendo la transformación 1 2Z X X
entonces 1 2Z X X
Todo x
f z f x f z x cuando 1X y 2X son discretas o bien
1 2Z X Xf z f x f z x dx
cuando 1X y 2X son continuas.
Las sumatorias e integrales presentadas en este teorema se denominan las
sumatorias o integrales de convolución, que son de utilidad no solamente en
probabilidad sino también en otros campos de la ingeniería de la computación.
2.9.1.3 Cuadrado de una variable aleatoria

59
Si ~ XX f x continua y definiendo 2Y X entonces 1
2Y X Xf y f y f y
y .
2.9.2 VECTORES ALEATORIOS DISCRETOS
Proposición 2—2: Método de cálculo
Suponga un vector aleatorio discreto de n variables discretas aleatorias 1, , nX X
con estructura probabilística 1 , , 1, ,
nX X nf x x . denota el espacio de posibles
realizaciones de 1, , nX X ; es decir, 11 , , 1, , : , , 0
nn X X nx x f x x . Se desea
obtener la densidad conjunta de 1Y 1 1, , , ,n kg X X Y 1, ,k ng X X . Cuando
1, , kY Y es conjuntamente discreto su estructura probabilística puede ser calculada
como 1 1; ; k kY y Y y 1 , , 1, ,
kY Y kf y y 1 , , 1,nX X nf x x , donde la sumatoria se
realiza sobre los 1, , nx x pertenecientes a por cada elemento del nuevo vector
de forma que 1, , ky y 1 1 1, , , , , ,n n ng x x g x x .
Ejemplo 2—14
Se sabe que 1 2 3, ,X X X tienen una función densidad discreta conjunta dada por:
1 2 3, ,x x x 0,0,0 0,0,1 0,1,1 1,0,1 1,1,0 1,1,1
1 2 3, , 1 2 3, ,X X Xf x x x 1
8
3
8
1
8
1
8
1
8
1
8
Encontrar la densidad conjunta de 1Y 1 1 2 3, ,g X X X 1 2 3X X X y de 2Y
2 1 2 3, ,g X X X 3 2X X .
Solución:
Resulta claro que y que, en
consecuencia,
0,0,0 , 0,0,1 , 0,1,1 , 1,0,1 , 1,1,0 , 1,1,1
60
1 2,y y 0,0 1,1 2,0 2,1 3,0
1 2, 1 2,Y Yf y y 1
8
3
8
1
8
2
8
1
8
Puesto que, por ejemplo, 1 2, 0,0Y Yf
1 2 3, ,
10,0,0 ,
8X X Xf y
1 2, 2,1Y Yf 1 2 3, , 1,0,1X X Xf
1 2 3, ,
21,1,0
8X X Xf , de forma similar se han calculado los restantes valores de la
tabla.
2.9.3 VECTORES ALEATORIOS CONTINUOS
2.9.3.1 Formulación
Proposición 2—3: Método de cálculo
Supongamos ahora que se tiene una estructura probabilística conjunta (función de
densidad) 1 , , 1,nX X nf x x del vector aleatorio n dimensional 1, , nX X , con espacio
de posibles realizaciones:
11 , , 1, , : , , 0
nn X X nx x f x x (1— 14)
(38)
De nuevo se asume que se desea calcular la densidad conjunta del vector
compuesto por las variables aleatorias 1Y 1 1, , , ,ng X XkY 1, ,k ng X X , donde
k es algún entero que satisface la restricción 1 k n .
Nota:
1. Si ,k n se introducirá adicionalmente, nuevas variables aleatorias
1kY 1 1, , , ,k ng X X nY 1, ,n ng X X para seleccionar
adecuadamente las funciones 1, ,k ng g ;
2. Cuando se encuentre la distribución conjunta de 1, , nY Y , finalmente
61
se puede calcular la distribución marginal de 1, , kY Y de la
distribución conjunta de 1, , nY Y . Este uso de dar la posibilidad de
introducir variables aleatorias convierte a la transformación 1y
1 1, , , ,ng x xny 1, ,n ng x x en una transformación de un espacio n
a otro espacio n dimensional, necesario en el método de cálculo
propuesto.
3. Se puede asumir que se esta buscando la distribución conjunta de
1Y 1 1, , , ,ng X XnY 1, ,n ng X X (en tanto sea la distribución
conjunta de 1, , kY Y ) cuando se ha dado la probabilidad conjunta de
densidad de 1, , nX X .
En primera instancia se presentan los resultados para 2n y después se generaliza
para 2n .
2.9.3.2 Transformación continua general
Teorema 2—11
Sea 1 2, , , nX X X X un vector aleatorio continuo con estructura probabilística
1 , , 1, ,
nX X nf x x . Donde 11 , , 1, , : , , 0n X X nx x f x x es el espacio de posibles
valores o realizaciones del vector. Supóngase que puede ser descompuesta en
conjuntos 1, , m tal que 1y 1 1, , ng x x , 2y 2 1, , , ,ng x xny 1, ,n ng x x es una
transformación uno a uno de i sobre , 1, , .i m y que 1x 1
1 1, , , ,i ng y y nx
1
1, ,ni ng y y denota la transformación inversa de sobre i , 1, , .i m Se define
como
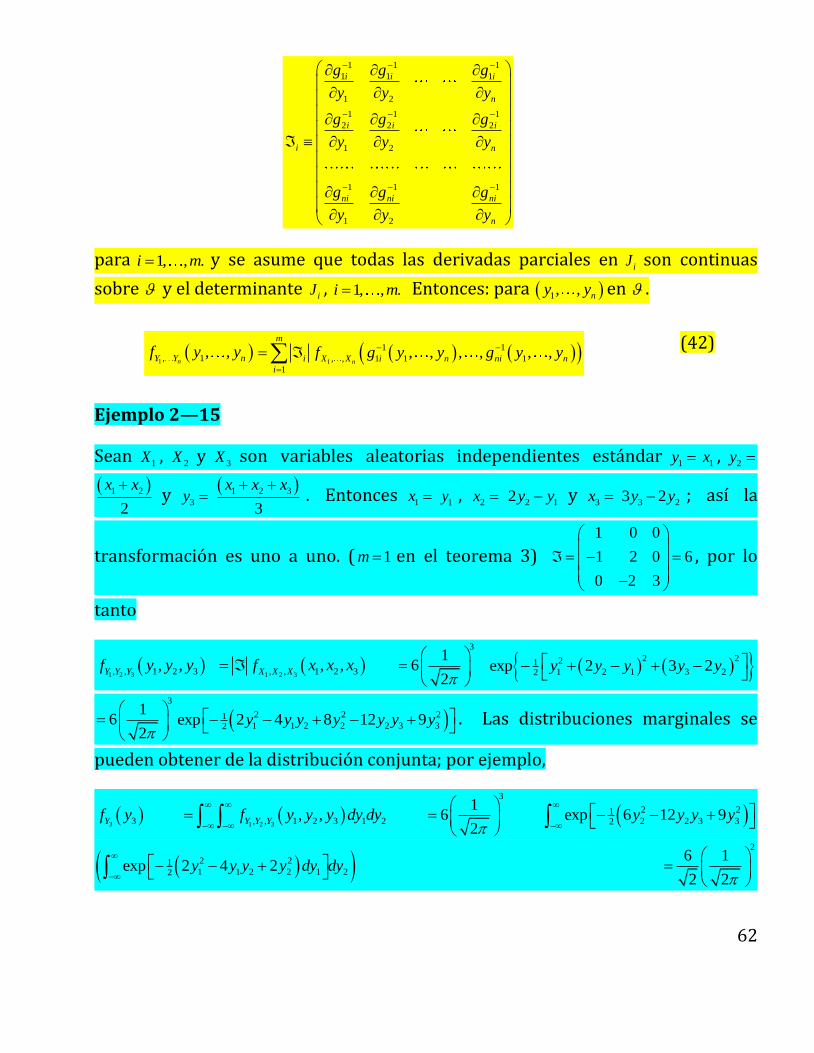
62
1 1 1
1 1 1
1 2
1 1 1
2 2 2
1 2
1 1 1
1 2
i i i
n
i i i
i n
ni ni ni
n
g g g
y y y
g g g
y y y
g g g
y y y
para 1, , .i m y se asume que todas las derivadas parciales en iJ son continuas
sobre y el determinante iJ , 1, , .i m Entonces: para 1, , ny y en .
1 , 1, ,
nY Y nf y y 1
1 1
, , 1 1 1
1
, , , , , ,n
m
i X X i n ni n
i
f g y y g y y
(42)
Ejemplo 2—15
Sean 1X , 2X y 3X son variables aleatorias independientes estándar 1y 1x , 2y
1 2
2
x x y 3y
1 2 3
3
x x x . Entonces 1x 1y , 2x 2 12y y y 3x 3 23 2y y ; así la
transformación es uno a uno. ( 1m en el teorema 3)
1 0 0
1 2 0
0 2 3
6 , por lo
tanto
1 2 3, , 1 2 3, ,Y Y Yf y y y
1 2 3, , 1 2 3, ,X X Xf x x x 3
16
2
2 221
1 2 1 3 22exp 2 3 2y y y y y
3
16
2
2 2 21
1 1 2 2 2 3 32exp 2 4 8 12 9y y y y y y y
. Las distribuciones marginales se
pueden obtener de la distribución conjunta; por ejemplo,
3 3Yf y
1 2 3, , 1 2 3 1 2, ,Y Y Yf y y y dy dy
3
16
2
2 21
2 2 3 32exp 6 12 9y y y y
2 211 1 2 2 1 22
exp 2 4 2y y y y dy dy
2
6 1
2 2
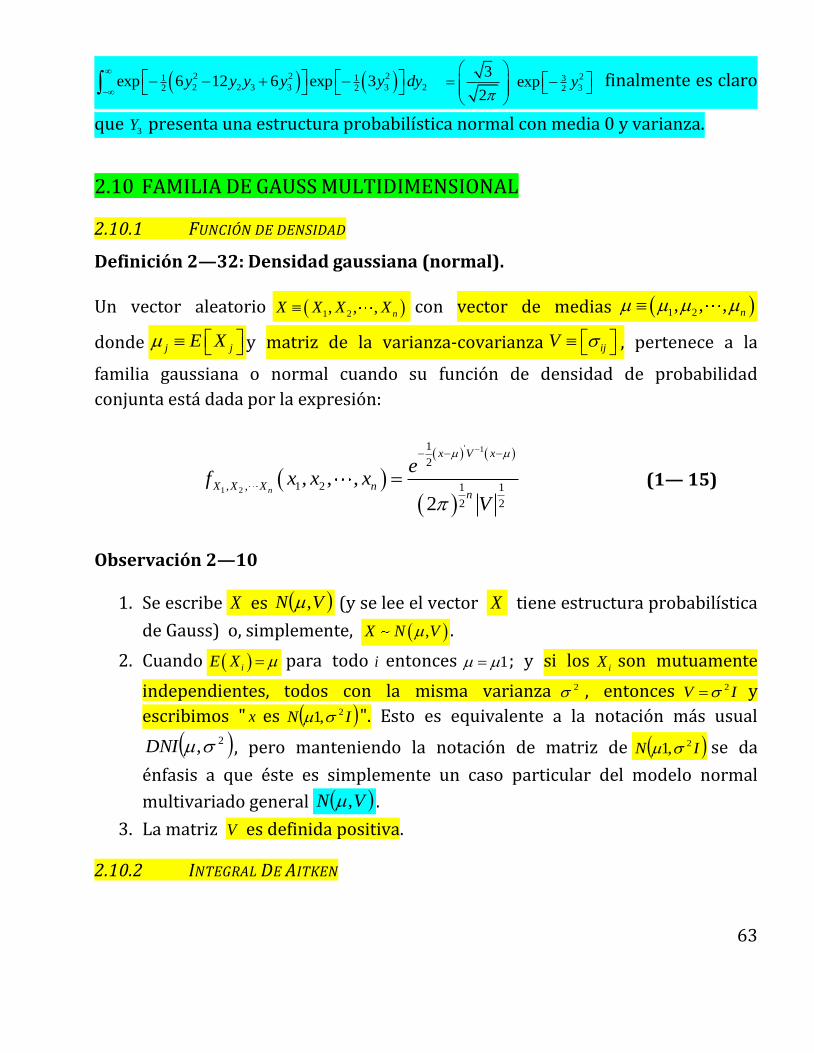
63
2 2 21 12 2 3 3 3 22 2
exp 6 12 6 exp 3y y y y y dy
3
2
2332
exp y finalmente es claro
que 3Y presenta una estructura probabilística normal con media 0 y varianza.
2.10 FAMILIA DE GAUSS MULTIDIMENSIONAL
2.10.1 FUNCIÓN DE DENSIDAD
Definición 2—32: Densidad gaussiana (normal).
Un vector aleatorio 1 2, , , nX X X X con vector de medias 1 2, , , n
donde j jE X y matriz de la varianza-covarianza ijV , pertenece a la
familia gaussiana o normal cuando su función de densidad de probabilidad
conjunta está dada por la expresión:
' 1
1 2
1
2
, , 1 2 11
22
, , ,
2n
x V x
X X X nn
ef x x x
V
(1— 15)
Observación 2—10
1. Se escribe X es VN , (y se lee el vector X tiene estructura probabilística
de Gauss) o, simplemente, ,X N V .
2. Cuando iE X para todo i entonces 1 ; y si los iX son mutuamente
independientes, todos con la misma varianza 2 , entonces IV 2 y
escribimos " x es IN 2,1 ". Esto es equivalente a la notación más usual
2,DNI , pero manteniendo la notación de matriz de IN 2,1 se da
énfasis a que éste es simplemente un caso particular del modelo normal
multivariado general VN , .
3. La matriz V es definida positiva.
2.10.2 INTEGRAL DE AITKEN

64
Un resultado del cálculo integral que es particularmente aplicable a cualquier
problema de la familia de Gauss multivariada es la integral de Aitken. Para A una
matriz simétrica definida positiva de orden n
2
1
2
1
12
1
2......
Adxdxen
n
Axx
(1— 16)
Para establecer este resultado, note que debido a que A es definida positiva existe
una matriz no-singular P tal que nIAPP . De 12
APAPP y para que 2
1
AP ;
y sea Pyx da yyAPyPyAxx y para que,
2
1
2
1
1
2
1
2
1
1
1
2
1
12
1
12
1
2
...2
1exp...
............
2
A
dyeA
dydyyP
Pdydyedxdxe
n
n
i
i
y
n
n
i
i
n
yy
n
Axx
i
La aplicación directa de este resultado a (1— 15) muestra que
122...,...,,... 2
1
2
1
12
1
121
VVdxdxxxxfnn
nn
como uno esperaría.
2.10.3 FUNCIÓN GENERADORA DE MOMENTOS
Como en (1— 12) la f.g.m. para la distribución normal multivariada es
n
n
x dxdxxVxxtVtM ...2
1exp...2 1
12
1
2
1
Reformulando el exponencial éste se vuelve
65
nn
Vttt
n
n
x
dxdxVtxVVtx
V
e
dxdxVtttVtxVVtxVtM
...2
1exp...
2
...2
1
2
1exp...2
1
1
2
1
2
1
2
1
1
12
1
2
1
Haciendo la transformación Vtxy de x a y para la cual el Jacobiano es la
unidad, la integral se reduce entonces a la integral de Aitken con matriz 1V . De
donde:
Vttt
n
nVttt
x e
V
VetM
2
1
2
1
2
1
2
1
12
12
1
2
2
(1— 17)
Diferenciando esto de la manera descrita en ¡Error! No se encuentra el origen de
la referencia. se muestra que el vector de medias es y la matriz de varianza-
covarianza es V .
2.10.4 DISTRIBUCIONES MARGINALES
La definición de la distribución marginal de nxxx ,...,, 21 a partir de los primeros k x ,
es, de acuerdo con (1— 4),
nknk dxdxxxxfxxf ...,...,,...,..., 1211 ,
La f.g.m. de esta distribución es, por (1— 12),
kn
xtxt
xx dxdxxxfetM kk
k...,...,... 11
...
...11
1
y sustituyendo para nxxf ,...,1 se convierte en
66
0...con ,
0...con ,,...,, de f.g.m.
...,...,...
12
111
11
...
...11
1
nk
Vttt
nknx
kn
xtxt
xx
tte
ttxxx
dxdxxxfetM kk
k
(1— 18)
Para hacer las substituciones 0...1 nk tt dividimos x , , V y t , definiendo,
kxxxx ...211 y nk xxx ...12
para que
21 xxx ;
entonces, conforme con esto,
21 ,
21 ttt
y
2221
1211
VV
VVV .
Ahora colocando 02 t en (1— 18) da
111111
1
2
1
1,...,
tVtt
xx etMk
Por analogía con (1— 17) y (1— 12) tenemos por consiguiente la función de
densidad marginal como
2
1
112
1
11
1
1111
11
2
2
1exp
,...,
V
xVx
xxffk
k
x

67
En comparación con (1— 15) vemos que 1xf es una distribución normal
multivariada. similarmente, también es
2
1
222
1
22
1
2222
12
2
2
1exp
,...,
V
xVx
xxffkn
nk
x (1— 19)
Así vemos que las densidades marginales de la distribución normal multivariada
son normales multivariadas.
Así pues V se toma como definida positiva para que lo sean también 11V y 22V .
Además, en estas expresiones, su uso puede hacerse de la forma dividida de V . Así
si
2221
1211
1
2221
12111
WW
WW
VV
VVV ,
entonces
12
1
221211
1
11 WWWWV y 12
1
111222
1
22 WWWWV
2.10.5 DISTRIBUCIONES CONDICIONALES
Sea xf la que denota la función de densidad de todos los n valores de x . Entonces
la ecuación (1— 5) da la distribución condicional de los primeros k x 's tal como
221 xgxfxxf
y sustituyendo de (1— 15) y (1— 19)
2
1
222
1
22
1
2222
1
21
2
2
1exp
VV
xVxxVx
xxfk
(1— 20)
Ahora, en términos de la partición de V y su inversa dada anteriormente, tenemos

68
1
12
1
22121111
VVVVW (1— 21)
y
1
22121112
1
22
1
221112
1
22
1
221211111
VVWVVVVVV
VVWWV .
Por consiguiente el exponente en (1— 20) se vuelve
22
1
2222
22
11
1
22121112
1
22
1
221112
1
22
1
22121111
2211
xVxx
x
VVWVVVVVV
VVWWxx
lo que se simplifica a
22
1
2212111122
1
221211
22
111
221211
12
1
22
2211
xVVxWxVVx
x
xVVIW
VV
Ixx
(1— 22)
Además, usando el resultado para el determinante de una matriz dividida [por
ejemplo, Searle (1966, p.96)],
1
112212
1
22121122
WVVVVVVV , de (1— 21).
De
1
1122
WVV (1— 23)
Sustituyendo (1— 22) y (1— 23) en (1— 20) da
2
1
1
112
1
22
1
2212111122
1
221211
21
2
2
1exp
W
xVVxWxVVx
xxfk
(1— 24)

69
mostrando, en la comparación con (1— 15), que la distribución condicional
también es normal:
1
1122
1
2212121 ,~ WxVVNxx
2.10.6 INDEPENDENCIA
Suponga que el vector nxxxx ...21 se divide en p subvectores
pxxxx ...21 . Entonces una condición necesaria y suficiente para que los
vectores sean mutuamente independiente es, que en la partición correspondiente
de ijVV para pji ,...,2,1, , 0ijV , para ji .
Prueba de esto es formulada a continuación. La f.g.m. de x es, por (1— 17),
p
i
p
j
jiji
p
i
ii
Vttt
x tVttetM1 11
2
1
2
1exp
y si 0ijV para ji esta se reduce a
p
i
iiiiii
p
i
iiiiiix tVtttVtttM11 2
1exp
2
1exp
Invocando la propiedad de que la f.g.m. de la distribución conjunta de colecciones
de variables independientes es el producto de sus f.g.m., concluimos que las ix son
independientes. Recíprocamente, si ellos son independientes, cada uno con su
varianza-covarianza iiK se dice, entonces que la f.g.m. de la distribución conjunta es
p
i
iiiiii
p
i
iiiiii VttttKtttKtt11 2
1exp
2
1exp
2
1exp
donde ppKKKdiagV ,...,, 2211 . De 0ijV para ji .
2.11 FAMILIAS DE DISTRIBUCIONES UNIVARIADAS
2.11.1 INTRODUCCIÓN
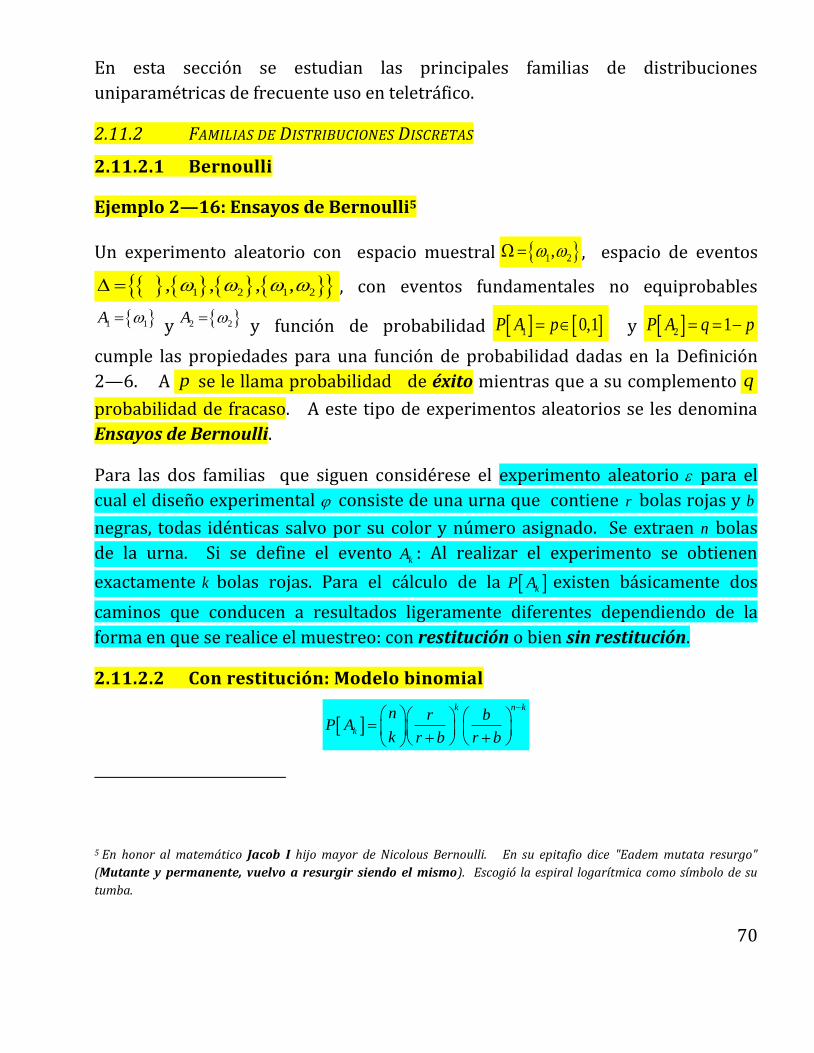
70
En esta sección se estudian las principales familias de distribuciones
uniparamétricas de frecuente uso en teletráfico.
2.11.2 FAMILIAS DE DISTRIBUCIONES DISCRETAS
2.11.2.1 Bernoulli
Ejemplo 2—16: Ensayos de Bernoulli5
Un experimento aleatorio con espacio muestral 1 2, , espacio de eventos
1 2 1 2, , , , , con eventos fundamentales no equiprobables
1 1A y 2 2A
y función de probabilidad 1 0,1P A p y 2 1P A q p
cumple las propiedades para una función de probabilidad dadas en la Definición
2—6. A p se le llama probabilidad de éxito mientras que a su complemento q
probabilidad de fracaso. A este tipo de experimentos aleatorios se les denomina
Ensayos de Bernoulli.
Para las dos familias que siguen considérese el experimento aleatorio para el
cual el diseño experimental consiste de una urna que contiene r bolas rojas y b
negras, todas idénticas salvo por su color y número asignado. Se extraen n bolas
de la urna. Si se define el evento kA : Al realizar el experimento se obtienen
exactamente k bolas rojas. Para el cálculo de la kP A existen básicamente dos
caminos que conducen a resultados ligeramente diferentes dependiendo de la
forma en que se realice el muestreo: con restitución o bien sin restitución.
2.11.2.2 Con restitución: Modelo binomial
k n k
k
n r bP A
k r b r b
5 En honor al matemático Jacob I hijo mayor de Nicolous Bernoulli. En su epitafio dice "Eadem mutata resurgo"
(Mutante y permanente, vuelvo a resurgir siendo el mismo). Escogió la espiral logarítmica como símbolo de su
tumba.
71
Ejemplo 2—17: Ayuda de Isaac Newton a su amigo Pepys.
Una carta interesante6 índica que Pepys le escribió a Newton preguntándole ¿Cuál
de los tres eventos es más probable: Que una persona obtenga 1B : al menos un
cuando 6 dados se lanzan; 2B : al menos dos cuando 12 dados son lanzados;
3B :
al menos tres cuando 18 dados son lanzados? ¿Cuál sería la respuesta de
Newton?
Una solución apresurada puede conducir a respuesta erradas como esta: Puede
pensarse, equivocadamente, que las probabilidades de los 3 eventos deben ser
iguales., es decir que la 12
_ _ 6_ _ _ 6 _P n numeros al lazar n dados , sin embargo, en
realidad eso no es verdad. El procedimiento que sigue ilustra una idea de solución
correcta a esta pregunta.
1. Al definir el evento iA : Exactamente i c se obtienen al lanzar n i
dados, es claro que nk
k i
i k
B A
.
2. Dado que los eventos iA son disjuntos,
1
nk
k i
i
P B P A
nk
i
i k
P A
. De
esta manera es posible encontrar las probabilidades de los iA y con
ellas obtener las probabilidades de kB .
3. Es claro que si se lanzan m dados, la probabilidad de exactamente
x es 1 5
6 6
x m xm
x
y que, en consecuencia, de esta misma forma,
la kP B nk
i
i k
P A
66 6 1 5
6 6
x k xk
x k
k
x
61
0
6 1 51
6 6
x k xk
x
k
x
,
6 Reproducida por American Statistician Vol. 14, No 4 de Octubre de 1960.
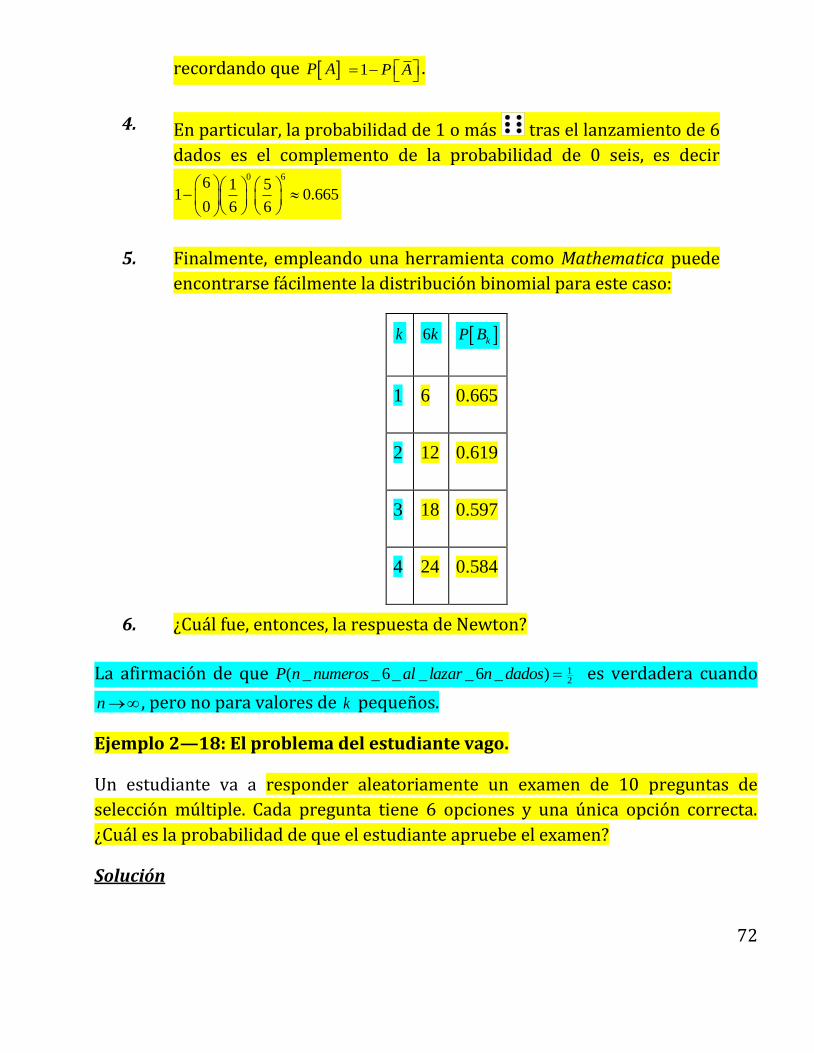
72
recordando que P A 1 P A .
4. En particular, la probabilidad de 1 o más tras el lanzamiento de 6
dados es el complemento de la probabilidad de 0 seis, es decir 0 6
6 1 51 0.665
0 6 6
5. Finalmente, empleando una herramienta como Mathematica puede
encontrarse fácilmente la distribución binomial para este caso:
k 6k kP B
1 6 0.665
2 12 0.619
3 18 0.597
4 24 0.584
6. ¿Cuál fue, entonces, la respuesta de Newton?
La afirmación de que 21)_6___6__( dadosnlazaralnumerosnP es verdadera cuando
n , pero no para valores de k pequeños.
Ejemplo 2—18: El problema del estudiante vago.
Un estudiante va a responder aleatoriamente un examen de 10 preguntas de
selección múltiple. Cada pregunta tiene 6 opciones y una única opción correcta.
¿Cuál es la probabilidad de que el estudiante apruebe el examen?
Solución
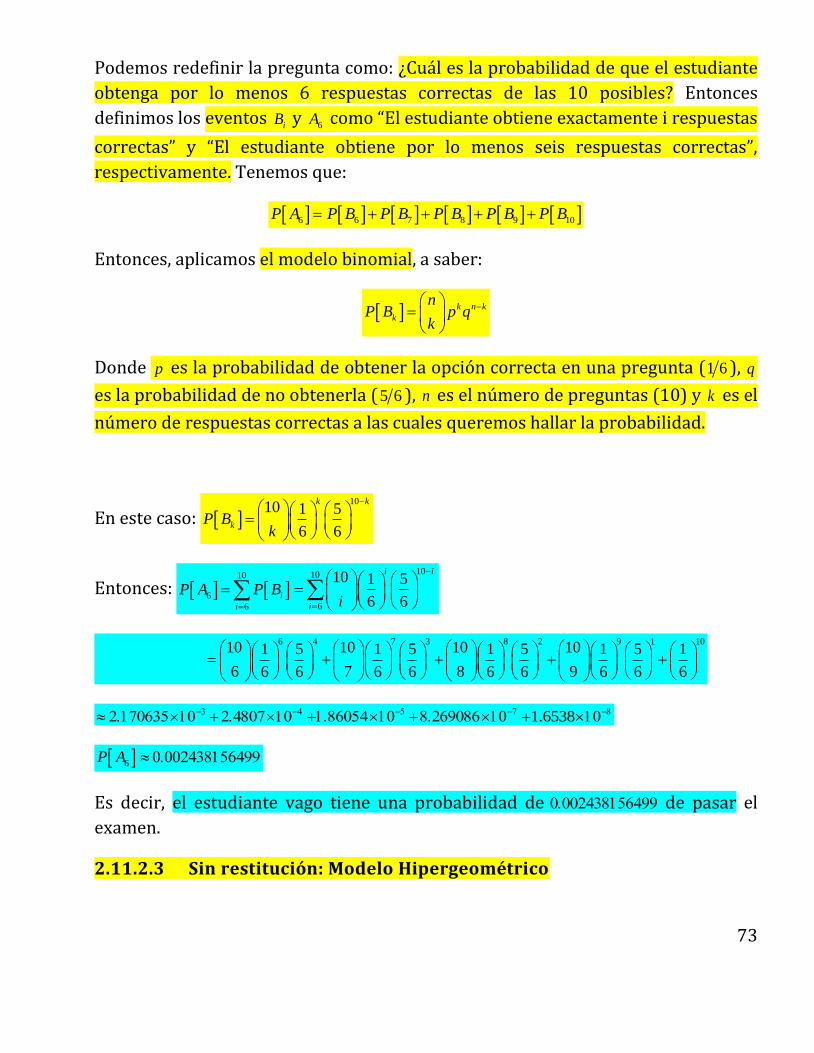
73
Podemos redefinir la pregunta como: ¿Cuál es la probabilidad de que el estudiante
obtenga por lo menos 6 respuestas correctas de las 10 posibles? Entonces
definimos los eventos iB y
6A como “El estudiante obtiene exactamente i respuestas
correctas” y “El estudiante obtiene por lo menos seis respuestas correctas”,
respectivamente. Tenemos que:
6P A 6 7 8 9 10P B P B P B P B P B
Entonces, aplicamos el modelo binomial, a saber:
k n k
k
nP B p q
k
Donde p es la probabilidad de obtener la opción correcta en una pregunta (1 6 ), q
es la probabilidad de no obtenerla (5 6 ), n es el número de preguntas (10) y k es el
número de respuestas correctas a las cuales queremos hallar la probabilidad.
En este caso: 10
10 1 5
6 6
k k
kP Bk
Entonces: 10
6
6
i
i
P A P B
1010
6
10 1 5
6 6
i i
i i
6 4
10 1 5
6 6 6
7 310 1 5
7 6 6
8 210 1 5
8 6 6
9 1 1010 1 5 1
9 6 6 6
1.6538
6P A
Es decir, el estudiante vago tiene una probabilidad de de pasar el
examen.
2.11.2.3 Sin restitución: Modelo Hipergeométrico
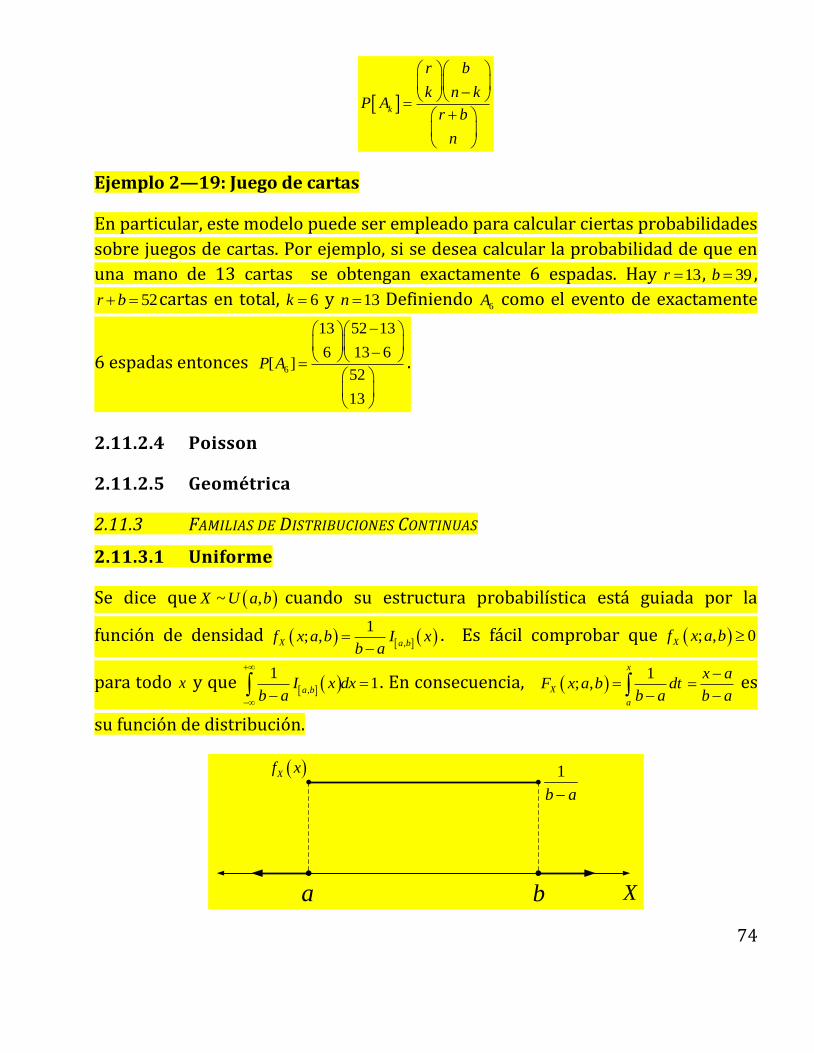
74
k
r b
k n kP A
r b
n
Ejemplo 2—19: Juego de cartas
En particular, este modelo puede ser empleado para calcular ciertas probabilidades
sobre juegos de cartas. Por ejemplo, si se desea calcular la probabilidad de que en
una mano de 13 cartas se obtengan exactamente 6 espadas. Hay 13r , 39b ,
52r b cartas en total, 6k y 13n Definiendo 6A como el evento de exactamente
6 espadas entonces 6
13 52 13
6 13 6[ ]
52
13
P A
.
2.11.2.4 Poisson
2.11.2.5 Geométrica
2.11.3 FAMILIAS DE DISTRIBUCIONES CONTINUAS
2.11.3.1 Uniforme
Se dice que ~ ,X U a b cuando su estructura probabilística está guiada por la
función de densidad ,
1; ,X a b
f x a b I xb a
. Es fácil comprobar que ; , 0Xf x a b
para todo x y que ,
11
a bI x dx
b a
. En consecuencia,
1; ,
x
X
a
F x a b dtb a
x a
b a
es
su función de distribución.
Xf x 1
b a
a b X

75
Figura 2—6: Función de densidad uniforme
a b
XF x
X
Figura 2—7: Función de Distribución uniforme.
Notas:
1. Tiene sentido hablar de uniformidad debido a que todos los valores en
ese intervalo son igualmente posibles de ser seleccionados en un
experimento aleatorio. Formalmente, esto significa que
1 1
2 2P x x X x x
1
2
1
2
1x x
x x
xdt
b a b a
no depende de x únicamente
del ancho del intervalo.
2. El hecho anterior puede visualizarse gráficamente como en la Figura
2—8.
a bx 1
2x x
1
2x x
Xf x
X
Figura 2—8: Probabilidad uniforme.
2. Un caso particular de especial interés en simulación se presenta
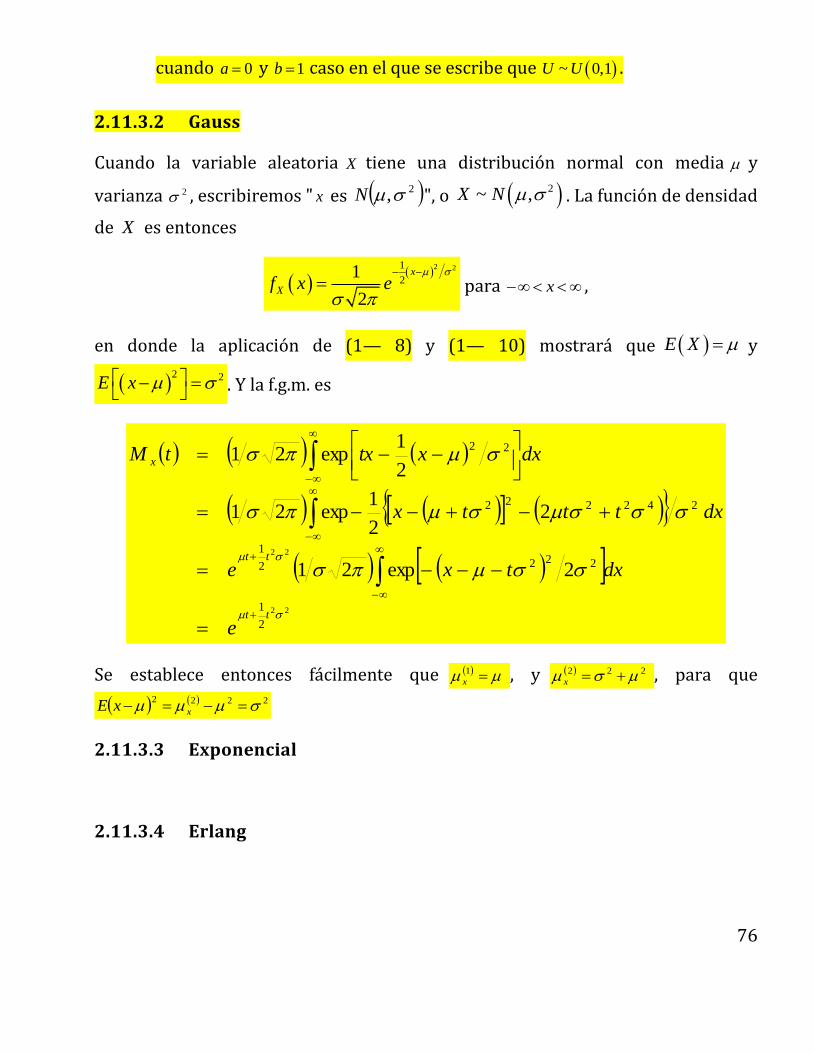
76
cuando 0a y 1b caso en el que se escribe que ~ 0,1U U .
2.11.3.2 Gauss
Cuando la variable aleatoria X tiene una distribución normal con media y
varianza 2 , escribiremos " x es 2,N ", o 2~ ,X N . La función de densidad
de X es entonces
2 21
21
2
x
Xf x e
para x ,
en donde la aplicación de (1— 8) y (1— 10) mostrará que E X y
2 2E x
. Y la f.g.m. es
22
22
2
1
2222
1
242222
22
2exp21
22
1exp21
2
1exp21
tt
tt
x
e
dxtxe
dxtttx
dxxtxtM
Se establece entonces fácilmente que 1
x , y 222 x , para que
2222 xxE
2.11.3.3 Exponencial
2.11.3.4 Erlang
77
2.11.3.5 Gamma
2.11.4 RELACIONES ENTRE FAMILIAS
78
2.12 EJERCICIOS
1. Dos urnas contienen el mismo número de bolas, algunas de color blanco y
algunas de color negro. De cada urna se extraen n (n ≥ 3) bolas con
restitución. Encuentre el número de extracciones y la composicion de las
dos urnas de forma que la probabilidad de que todas las bolas blancas
extraidas de la primera urna sea igual a la probabilidad de que las
extracciones en la segunda sean todas blancas o todas negras.
2. Epitafio de Diofanto : 'Dios le concedió ser niño la sexta parte de su vida,
una duodécima parte de ella más tarde cubrió de vello sus mejillas;
encendió en él la antorcha del matrimonio tras una séptima parte, y cinco
años después le concedió un hijo. Un hijo de nacimiento tardío, que el
destino se llevó cuando alcanzó la edad de la mitad de la vida de su padre.
Éste consoló su aflicción con la ciencia de los números durante los cuatro
años siguientes, tras los cuales su vida se extinguió.'
2.13 RESUMEN DEL CAPÍTULO
79
80
3 PROCESOS ESTOCÁSTICOS
Ejemplo 3—1: Borrachito.
Suponga que un borracho se encuentra en el borde de un precipicio, si da un paso
hacia delante, él caerá en el abismo. El borracho da pasos aleatorios a izquierda y a
derecha, es decir hacia el precipicio o en sentido contrario indiferentemente, si la
probabilidad de que el borracho de el paso hacia el precipicio es 1
3q y la
probabilidad de que se aleje de este es 2
3p , ¿cuál es la probabilidad de que el
borracho se salve?
3.1 INTRODUCCIÓN
Una generalización interesante del concepto de vector aleatorio se encuentra en la
idea de proceso estocástico. En un proceso estocástico, las estructuras
probabilísticas de los vectores aleatorios dependen del tiempo y del espacio en el
cual se desenvuelvan las variables del vector.
3.2 DEFINICIÓN
Definición 3—1: Proceso Estocástico.
Un Proceso estocástico es una familia de variables aleatorias indexadas por el
tiempo ,tZ
, donde pertenece al espacio muestral y t pertenece al conjunto de
índices.
Observación 3—1
Para un t fijo, ,tZ
es una variable aleatoria. Mientras que para un dado, ,tZ
es
una función de t , llamada función muestral o realización. La población que
consiste en todas las posibles realizaciones se denomina el conjunto de series de
tiempo del proceso.

81
Se asume que el conjunto de índices serán los enteros, a menos que se establezca lo
contrario. Considere un conjunto finito de variables aleatorias 1 2, , ,
nt t tZ Z Z de un
proceso estocástico ,
: 0, 1, 2,t
Z t
, La distribución n -dimensional
(conjunta)está definida como
1 11, , : , , , ,
n nt t t n tF z z p z t z z t z
Definición 3—2: Proceso Estocástico estacionario.
1. Se dice que un proceso estocástico es estacionario en distribución de primer
orden si su función de distribución uni -dimensional es invariante al tiempo,
es decir, si 1 1t t kF z F z para todo 1t y k en los enteros,
2. estacionario en distribución si 1 2 1 2, ,t t t k t kF z z F z z , y estacionario de n -
ésimo orden si 1 1, , , ,
k nt tn t t kF z z F z z , Para cualquier n -úpla 1, , nt t
y k en los enteros.
3. Un proceso se dice estrictamente estacionario si
1 1, , , ,
k nt tn t t kF z z F z z es valido para todo n , es decir, 1,2,n .
También denotada por estacionariedad fuerte o completa.
Observación 3—2
1. Claramente si 1 1, , , ,
k nt tn t t kF z z F z z es valida para n m , también
será verdadera para n m porque la función de distribución de orden m
determina todas las funciones de distribución de orden menor. Por lo tanto,
que una función de distribución de orden superior sea estacionaria, siempre
determina que las funciones de distribución que sean de orden menor que
ella también lo sean.
2. Es posible entender adecuadamente lo que es ser un proceso estocástico ,tZ
, como un conjunto de variables aleatorias definidas sobre un espacio
muestral indexadas por el tiempo. Usualmente se suprime y simplemente
se escribe ,tZ
como t
Z o tZ , también denotamos la variable aleatoria por X
82
o por
X
. El proceso estocástico es llamado proceso de valor real, si
solamente asume valores en , el conjunto de los números reales, a menos
que se establezca lo contrario, solo trabajaremos con procesos de valor real.
Definición 3—3: Función de media del proceso estocástico.
Para un proceso de valor real : 0, 1, 2,tZ t , definimos la función de media del
proceso como t tE Z .
Definición 3—4: Función de varianza del proceso estocástico.
Para un proceso de valor real : 0, 1, 2,tZ t , definimos la función de e varianza
del proceso 2
t t tE Z
Definición 3—5: Función de covarianza del proceso estocástico.
Para un proceso de valor real : 0, 1, 2,tZ t , definimos La función de covarianza
del proceso entre 1t
Z y 2t
Z
1 1 2 21 2, t t t tt t E Z Z
Y la función de correlación entre 1t
Z y 2t
Z
1 2
1 2
1 2 2 2
,,
t t
t tt t
Observación 3—3
1. Para un proceso estacionario estricto, la función de distribución es la misma
para todo t , la función de media t es una constante, siempre que
tE Z .
2. Igualmente, si tE Z entonces 1
2 2 para todo t , por lo tanto es también
una constante.

83
3. Además, puesto que 1 2 1 2, ,t t t k t kF z z F z z para todo
1 2,t t en los enteros y k ,
tenemos 1 2 1 2, ,t t t k t k y 1 2 1 2, ,t t t k t k tomando 1t t k y 2t t ,
tenemos 2 1, , , kt t t k t t t k y 1 2, , , kt t t k t t t k .
4. Entonces, para un proceso estrictamente estacionario, con los dos primeros
momentos finitos, la covarianza y la correlación entre tZ y
t kZ , depende solo
de la diferencia del tiempo k .
Un ejemplo trivial de estacionariedad fuerte es una secuencia de experimentos
relacionados a variables aleatorias independientes e idénticamente distribuidas.
Esta secuencia de variables aleatorias independientes usualmente no existe o no
interesan en procesos estocásticos o series de tiempo. Sin embargo distinto de este
simple caso, en el que son independientes e idénticamente distribuidas, es muy
difícil o imposible actualmente, verificar la función de distribución, particularmente
la distribución conjunta de una serie de tiempo observada. Entonces, en análisis de
procesos estocásticos (series de tiempo), frecuentemente usamos estacionariedad
más débil en términos de los momentos del proceso.
Un proceso se dice de orden n -ésimo débil si todos los momentos conjuntos de
orden superior a n existen y son invariantes al tiempo, por ejemplo,
independientes del momento de origen. Por lo tanto, un proceso de segundo orden
tendrá media y varianza constantes, y la función de covarianzas y correlación solo
dependerá de la diferencia en el tiempo. Algunas veces, el sentido de
estacionariedad en el sentido débil, o varianza estacionaria, son también utilizados
para describir procesos de segundo orden débil. Se sigue de las definiciones que
los procesos estrictamente estacionarios con los dos primeros momentos finitos
también son procesos de segundo orden débil, o de covarianza estacionaria. Sin
embargo, un proceso estrictamente estacionario, podria no tener momentos finitos,
por lo tanto, no tendría covarianza estacionaria. Un ejemplo trivial es el proceso
que consiste en una secuencia de variables aleatorias independientes e
idénticamente distribuidas con distribución Cauchy. Claramente el proceso es
estrictamente estacionario, pero no es débilmente estacionario, de cualquier orden,
pues no existen los momentos conjuntos de ningún orden.
Ejemplo 3—2
84
Considere la siguiente secuencia en el tiempo:
tZ Asen t
Donde a A es una variable aleatoria con media cero y varianza uno y es una
variable aleatoria con distribución uniforme en el intervalo , , independiente
de A . Entonces:
0tE Z E A E sen t
2
t t kE Z Z E A sen t sen t k
2 1cos cos 2 2
2E A E k t k
1 1
cos cos 2 22 2
k E t k
1 1 1
cos cos 2 22 2 2
k t k d
1 1
cos 2 22 8
k sen t k
1
cos2
k
El cual depende solo de la diferencia en el tiempo k . Entonces el proceso es de
varianza estacionaria
Ejemplo 3—3
Sea tZ una secuencia de variables aleatorias independientes provenientes,
alternadamente, de una distribución normal estándar 0,1N y dos valores 1 y 1
cada uno con probabilidad 1
2, claramente, 0tE Z y 2 1
tE Z para todo t . Ahora

85
0,
,1,
t s
si t sE Z Z
si t s
Y
2 2
0,,
1,
t s
t s
si t sE Z Zt s
si t sE Z E Z
De donde, el proceso es de varianza estacionaria. Sin embargo, el proceso no es
estrictamente estacionario. De hecho, no es estacionario en distribución de ningún
orden.
En nuestra discusión y ejemplos anteriores, es claro que la “covarianza
estacionaria”, es una estacionariedad mas débil que la “Estacionariedad estricta” o
que la “estacionariedad en distribución”. Sin embargo, frecuentemente
trabajaremos con procesos con covarianza estacionaria o procesos de segundo
orden con estacionariedad débil en análisis de series de tiempo, pues será fácil
verificar los dos primeros momentos. Por la tanto, a menos qeue se mencione lo
contrario, usaremos el termino estacionariedad, para referirnnos a procesos que
tengan covariana estacionaria, por esto tenemos la siguiente importante
observación:
Un proceso estocástico se dice normal o procesdo Gaussiano si su función de
distribución conjunta es normal . como una distribución normal esta caracterizada
por sus dos primeros momentos, la estacionariedad estricta y la estacionariedad
débil son equivalentes en un proceso Gaussiano. A menos que se mencione lo
contrario, los procesos que discutiremos se asumiran Gaussianos. Esto es por que
la función de Autocorrelación y la función de Autocorrelación parcial en las
proximas secciones se convertiran en herramientas fundamentales en el analisis de
series de tiempo.
86
3.3 LAS FUNCIONES DE AUTOCOVARIANZA Y AUTOCORRELACIÓN
3.4 FUNCION DE AUTOCORRELACIÓN PARCIAL
3.5 PROCESOS CON RUIDO BLANCO
3.6 CADENAS DE MARKOV EN TIEMPO DISCRETO
3.6.1 INTRODUCCIÓN
3.6.2 ECUACIONES DE CHAPMAN–KOLMOGOROV
3.6.3 CLASIFICACIÓN DE LOS ESTADOS
3.7 CADENAS DE MARKOV DE TIEMPO CONTINUO
3.7.1 INTRODUCCIÓN
3.7.2 DEFINICIÓN
3.7.3 PROCESOS DE NACIMIENTO Y MUERTE

87
3.7.4 FUNCIÓN DE TRANSICIÓN DE PROBABILIDAD
3.7.5 REVERSIBILIDAD
3.8 DISTRIBUCIÓN EXPONENCIAL Y EL PROCESO DE POISSON
3.8.1 INTRODUCCIÓN
3.8.2 DEFINICIÓN DE PROCESO DE POISSON
3.8.3 DISTRIBUCIONES DE LOS TIEMPOS ENTRE LLEGADAS Y DE ESPERAS
3.8.4 PROCESO DE POISSON NO HOMOGÉNEO
3.9 **TEORÍA DE RENOVACIÓN
3.10 EJERCICIOS
3.11 RESUMEN DEL CAPÍTULO
88
4 MODELOS DE TRÁFICO
4.1 ERLANG B: SISTEMA DE PÉRDIDA DE ERLANG
4.2 ERLANG B EXTENDIDO: EXTENDIDO.
4.3 ERLANG C: SISTEMA CON RETARDO
4.4 **REDES DE COLAS
5 DIMENSIONAMIENTO DE REDES DE
TELECOMUNICACIONES
6 MEDIDAS DE TRÁFICO
89
7 REFERENCIAS BIBLIOGRÁFICAS
[1] S. Hawking y L. Mlodinow, El Gran Diseño, Barcelona: Crítica, 2010.
[2] Rosss y S. M. Ross, Introduction to Probability Models, Amsterdam: Academic
Press, 2003.
[3] R. D. Yates y D. J. Goodman, Probability and Estochastic Processes: A friendly
Introduction for Electrical and Computer Engineers., Boston: Jhon Wiley & Sons,
Inc., 2005.
[4] A. M. Law y W. D. Kelton, Simulation Modeling and Analysis, Boston:
McGrawHill, 2000.
[5] IUT, Teletraffic Engineering HandBook, Dinamarca: Technical Unversity of
Denmark, 2001.