J.L.Huertas SETI-03-04 TEMA2: Fundamentos de Señales y...
45
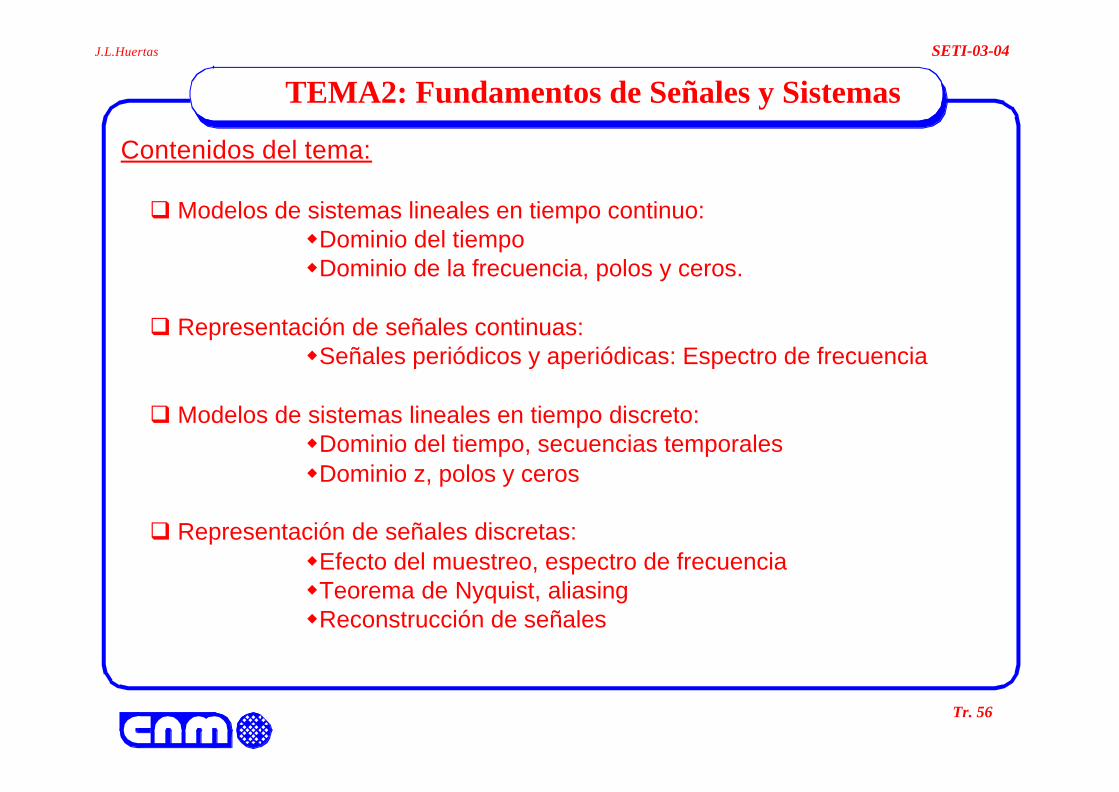
J.L.Huertas SETI-03-04 Tr. 56 TEMA2: Fundamentos de Señales y Sistemas Contenidos del tema: q Modelos de sistemas lineales en tiempo continuo: wDominio del tiempo wDominio de la frecuencia, polos y ceros. q Representación de señales continuas: wSeñales periódicos y aperiódicas: Espectro de frecuencia q Modelos de sistemas lineales en tiempo discreto: wDominio del tiempo, secuencias temporales wDominio z, polos y ceros q Representación de señales discretas: wEfecto del muestreo, espectro de frecuencia wTeorema de Nyquist, aliasing wReconstrucción de señales
Transcript of J.L.Huertas SETI-03-04 TEMA2: Fundamentos de Señales y...
J.L.Huertas SETI-03-04
Tr. 56
TEMA2: Fundamentos de Señales y Sistemas
Contenidos del tema:
q Modelos de sistemas lineales en tiempo continuo: wDominio del tiempowDominio de la frecuencia, polos y ceros.
q Representación de señales continuas: wSeñales periódicos y aperiódicas: Espectro de frecuencia
q Modelos de sistemas lineales en tiempo discreto: wDominio del tiempo, secuencias temporaleswDominio z, polos y ceros
q Representación de señales discretas: wEfecto del muestreo, espectro de frecuenciawTeorema de Nyquist, aliasingwReconstrucción de señales

J.L.Huertas SETI-03-04
Tr. 57
q Forma General de la Ecuación que describe un circuito lineal invariante en eltiempo:
q Estructura de su ecuación transformada:
q Estructura alternativa:
tn
n
d
d ya1
tn 1–
n 1–( )
d
d y ... an 1– tddy any+ + + + b0
tm
m
d
d w b1tm 1–
m 1–( )
d
d w ... bmw+ + +=
Y s( ) a1sn 1– Y s( ) ... an 1– sY s( ) anY s( )+ + + + b0smW s( ) b1sm 1– W s( ) ... bmW s( )+ + +=
Y s( )W s( )------------
b0sm
b1sm 1–
... bm+ + +
sn a1sn 1– ... an 1– s an+ + + +--------------------------------------------------------------------------------=
Función de Transferencia de Sistemas lineales Continuos
J.L.Huertas SETI-03-04
Tr. 58
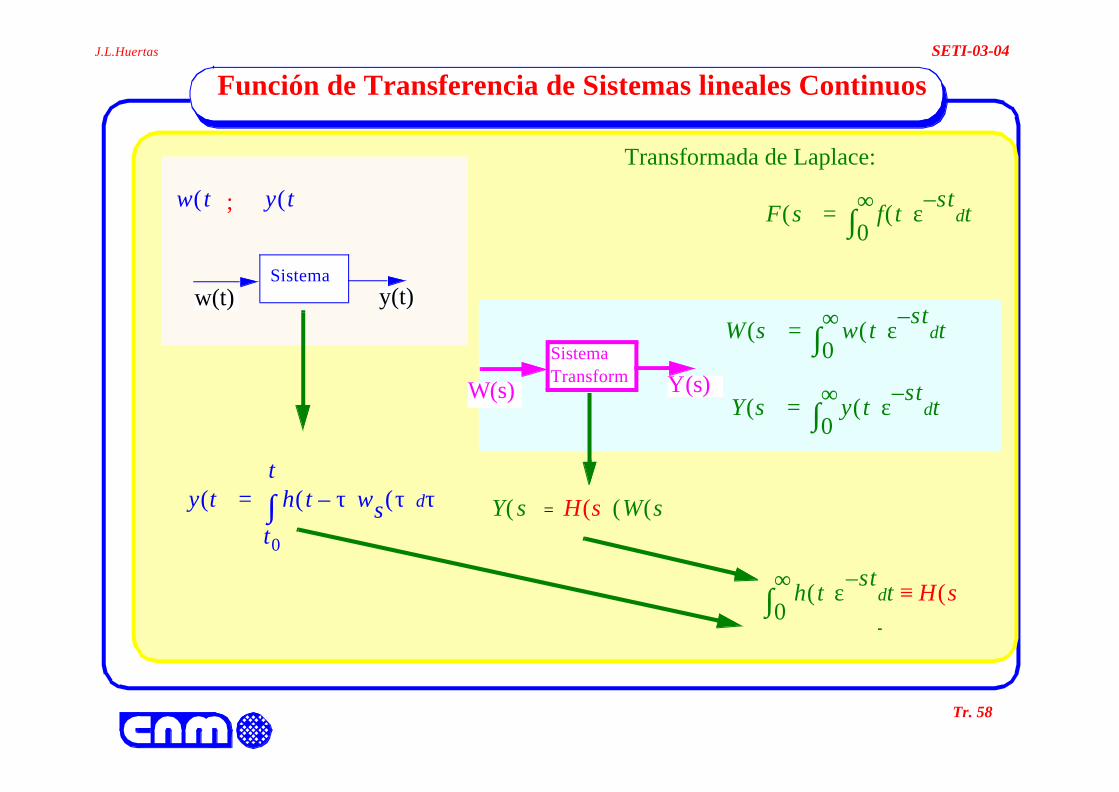
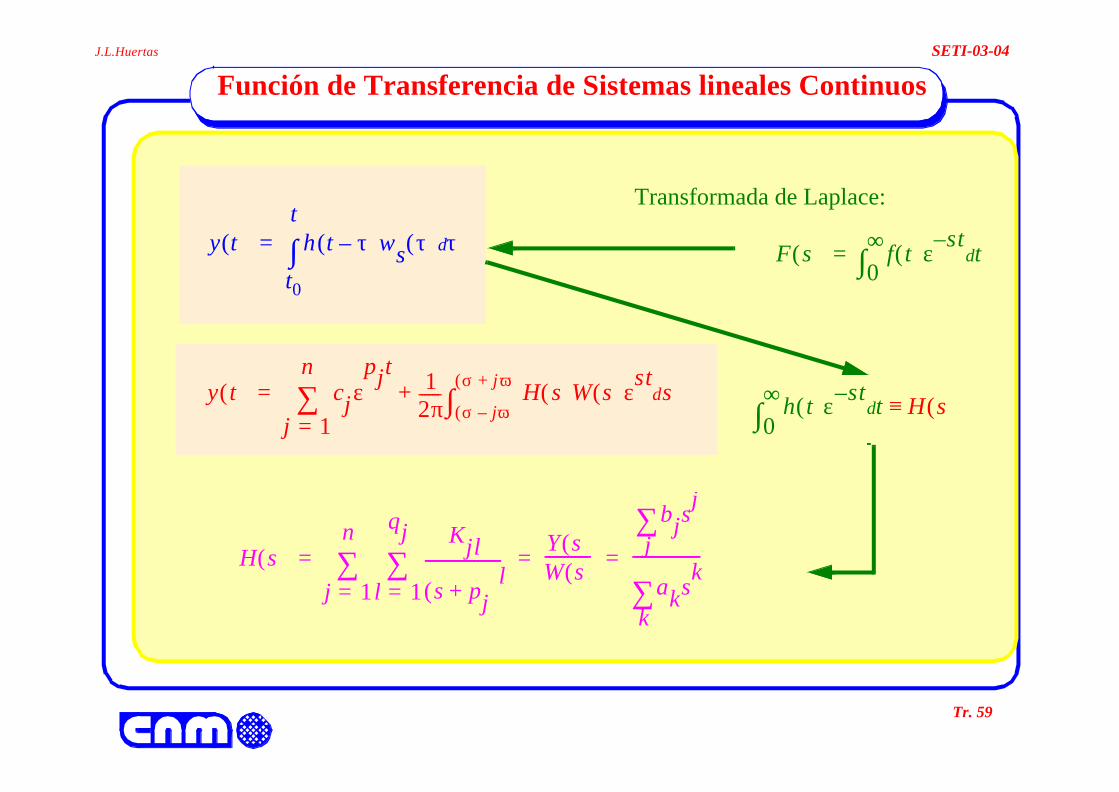
Y s( ) H s( ) W s( )( )=y t( ) h t τ–( )ws τ( ) τd
t0
t
∫=
Transformada de Laplace:
F s( ) f t( )εst–
td0∞
∫=
Función de Transferencia de Sistemas lineales Continuos
h t( )εst–
td0∞
∫ H s( )≡
; w t( ) y t( )
Sistemaw(t) y(t)
W s( ) w t( )εst–
td0∞
∫=
Y s( ) y t( )εst–
td0∞
∫=
SistemaTransform
W(s) Y(s)
J.L.Huertas SETI-03-04
Tr. 59
y t( ) cjεpjt
j 1=
n∑ 1
2π-------- H s( )W s( )ε
stsd
σ jω–( )
σ jω+( )∫+=
y t( ) h t τ–( )ws τ( ) τd
t0
t
∫=
Transformada de Laplace:
F s( ) f t( )εst–
td0∞
∫=
Función de Transferencia de Sistemas lineales Continuos
H s( )Kjl
s pj+( )l
--------------------l 1=
qj∑
j 1=
n∑
Y s( )W s( )------------
bjsj
j∑
akk∑ s
k-----------------= = =
h t( )ε st– td0∞
∫ H s( )≡
J.L.Huertas SETI-03-04
Tr. 60
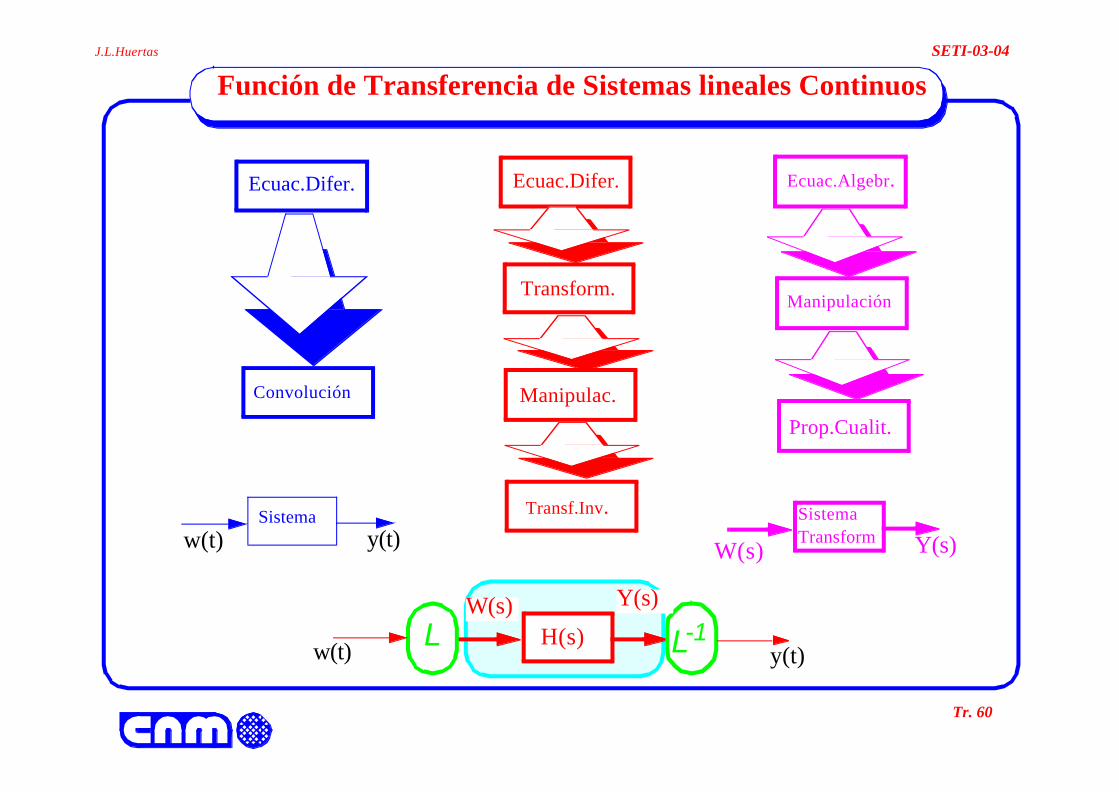
Función de Transferencia de Sistemas lineales Continuos
Ecuac.Difer.
Convolución
Ecuac.Difer.
Transform.
Transf.Inv.
Ecuac.Algebr.
Manipulación
Prop.Cualit.
Manipulac.
H(s)L L-1w(t) y(t)
W(s) Y(s)
SistemaTransform
W(s) Y(s)Sistema
w(t) y(t)

J.L.Huertas SETI-03-04
Tr. 61
q Los polos de H(s) nos dan información sobre:q q La parte de la Respuesta que se desvanece con el tiempoq q El valor de Kj corresponde a la Respuesta al Impulsoq q El valor de los coeficientes para la Respuesta Natural depende de
las condiciones iniciales
Im s
Re s
Los polos son singularidades del Sistema
Un Sistema es Estable sii todos sus polos están en
La respuesta frecuencial de un Sistema corresponde a su com-portamiento sobre el eje Imagi-nario (Diagrama de Bode)
Función de Transferencia de Sistemas lineales Continuos

J.L.Huertas SETI-03-04
Tr. 62
La Transformación de Laplace es una representación de una función enla base infinita de las funciones exponenciales
Ejemplo de Tabla de Transformadas de Laplace:
Transformada de Laplace

J.L.Huertas SETI-03-04
Tr. 63
Propiedades de la Transformada de Laplace:
q Reduce la solucion de ecuaciones diferenciales lineales a la solución de ecuacioneslineales algebraicas.
q No todas las funciones temporales son transformables (en la práctica lo son todasaquellas que no duran infinitamente).
q Toda función temporal (de duración finita) tiene asociada unívocamente una trans-formada y viceversa.
q La Transformada de Laplace es lineal.q La transformada de una derivada:
q La transformada de una integral:
q Estrictamente hablando, la transformación sólo es válida para Re (s) > 0, pero puedeextenderse por continuación analítica. Sólo no está definida en las singularidades(teorema de los residuos).
ϒtd
d f t( ) sϒ f t( )[ ] f 0_( )–=
ϒ f τ( ) τd0_t
∫1s--- ϒ f t( )[ ]=
Transformada de Laplace
J.L.Huertas SETI-03-04
Tr. 64
Representación de Señales
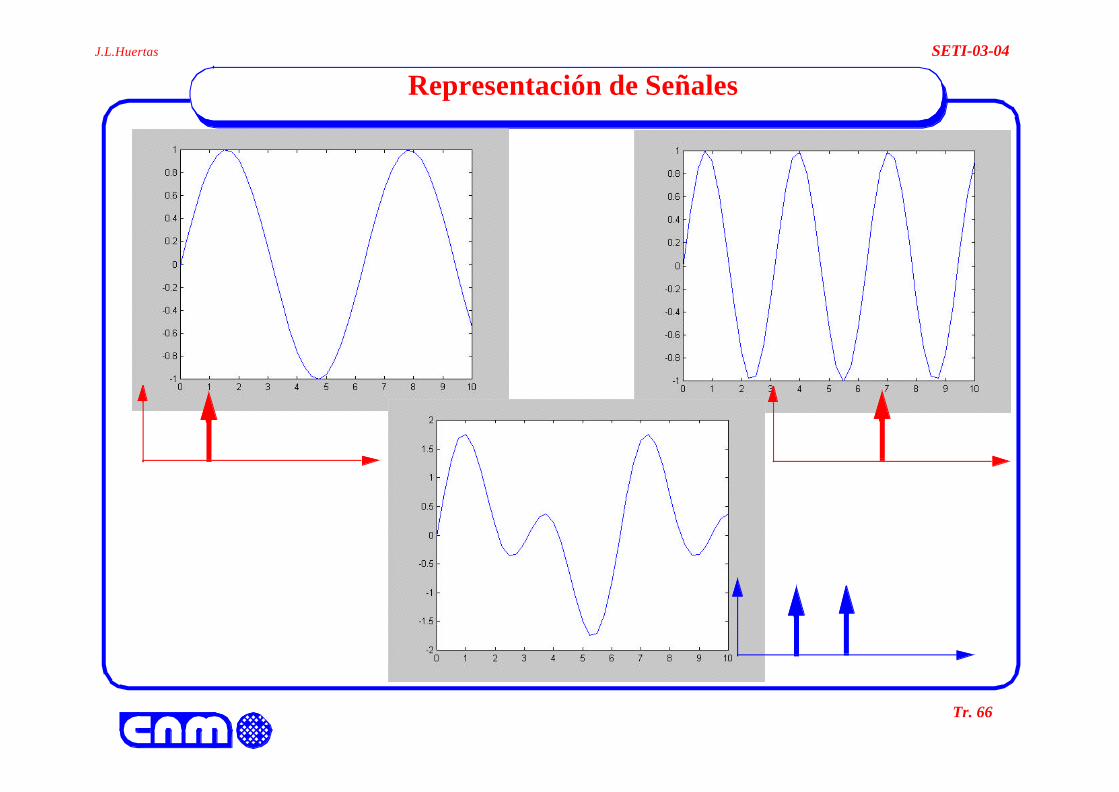
q Las señales que se pueden manejar son muy diversas.q En general, no serán señales periódicas.q Una representación “general” (válida para cualquier señal) sería muy valiosa.q Las funciones base que más interesan son periódicas.q La herramienta adecuada es el desarrollo en serie de Fourier:
; donde:
q Es una serie infinita de funciones básicas ortogonales, válida para representarfunciones (periódicas o no) en el intervalo (-π, π) (o funciones periódicas entodo intervalo).
q Puede truncarse esta serie, aunque ello tiene consecuencias (fenómeno de Gibbs):
g θ( ) ckejkθ
k ∞–=
k ∞=∑= π– θ π< < ck
12π------ g θ( )e
jkθ–θd
π–π
∫=
gN θ( )a02------ ak kθsin bk kθcos+[ ]
k 1=
N∑+=

J.L.Huertas SETI-03-04
Tr. 65
Representación de Señales
q Si pretendemos representar señales no periódicas en cualquier intervalo, la herrami-enta es la Transformación de Fourier:
donde:
q Las propiedades de linealidad se preservan.q Un caso de interés es el de señales que combinan diversas frecuencias por
debajo de un cierto valor (señales limitadas en banda).q Tanto los coeficientes de la serie de Fourier como la función G(ω) dan lugar a la rep-
resentación espectral de una función.
G ω( ) 12π------ g τ( )e
jωτ–ωd
∞–∞∫=
g t( ) 12π------ G ω( )ejωt ωd
∞–∞∫=
J.L.Huertas SETI-03-04
Tr. 66
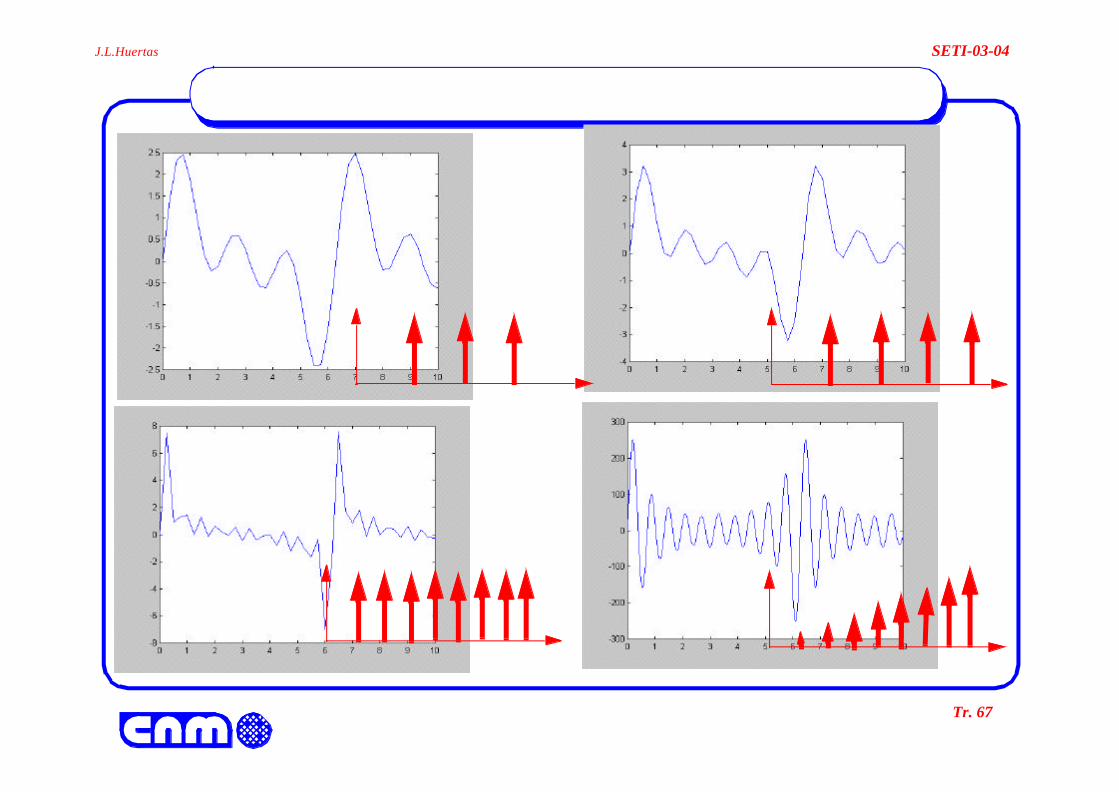
Representación de Señales
J.L.Huertas SETI-03-04
Tr. 67

J.L.Huertas SETI-03-04
Tr. 68
q Diferentes formas de muestrear una señal
Señales discretizadas temporalmente

J.L.Huertas SETI-03-04
Tr. 69
Representación de Señales Discretas
q Señal definida únicamente en intervalos discretos del tiempoq Intervalos periódicos de muestreo (cada T segundos)q Duración “nula” de la señal (“instantánea)
t = T ------> Y(1)t = 2T ------> Y(2)..........................................t = (n-1)T ------> Y(n-1t = nT ------> Y(n))
i(t)
tT0 2T0 3T0 4T0 5T0
I

J.L.Huertas SETI-03-04
Tr. 70
q Secuencia δ(n):
q Secuencia u(n):
q Secuencia retrasada un tiempo nd:
q Secuencia periódica
; para todo n
δ n( ) 1 n 0≡,0 n 0≠,
=
u n( ) 1 n 0≥,0 n 0<,
=
y n( ) x n nd–( )=
x n( ) x n nd–( )=
Representación de algunas Secuencias

J.L.Huertas SETI-03-04
Tr. 71
Proceso de Muestreo
Ck n( ) δ n k–( )k ∞–=
∞∑=
Ck(n)
f(t) x(n)

J.L.Huertas SETI-03-04
Tr. 72
x n( ) x k( )δ n k–( )k ∞–=
∞∑=
Proceso de Muestreo

J.L.Huertas SETI-03-04
Tr. 73
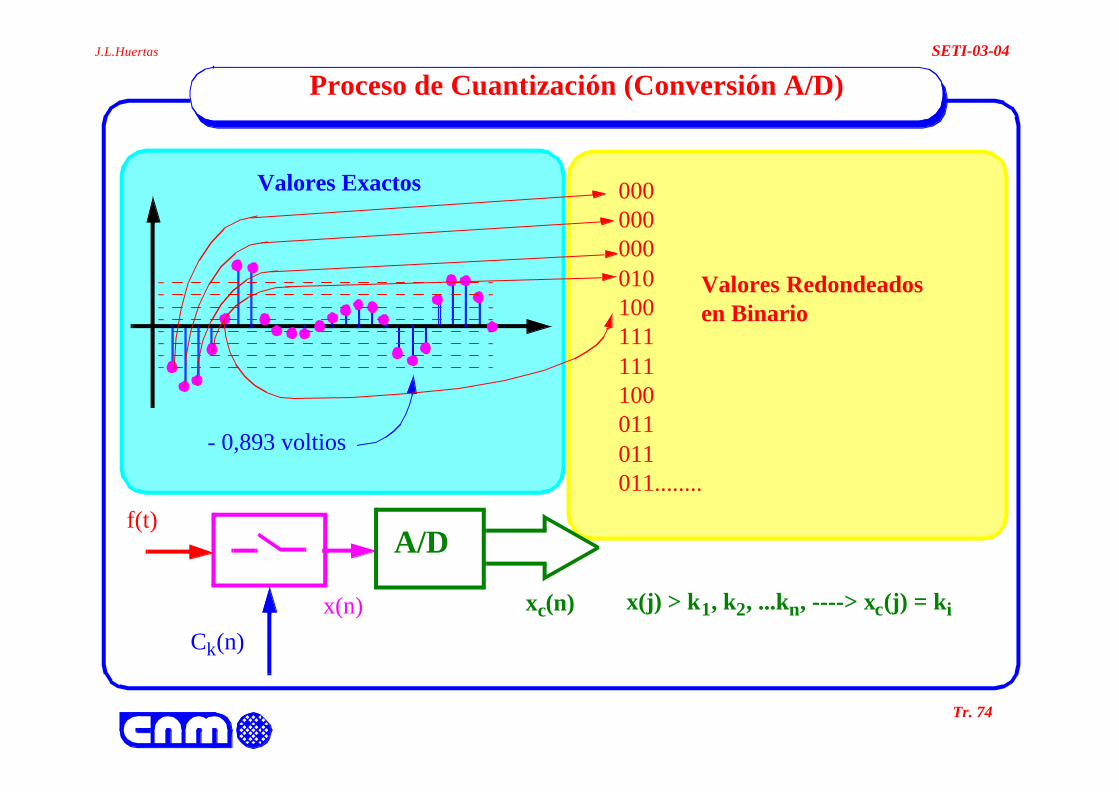
- 0,893 voltios
Valores Redondeados en BinarioValores Exactos
- 1 voltios:000
Proceso de Cuantización (Conversión A/D)
Ck(n)
f(t)
x(n)
A/D
xc(n) x(j) > k1, k2, ...kn, ----> xc(j) = ki
J.L.Huertas SETI-03-04
Tr. 74
- 0,893 voltios
Valores Redondeados en Binario
Valores Exactos 000000000010100111111100011011011........
Proceso de Cuantización (Conversión A/D)
Ck(n)
f(t)
x(n)
A/D
xc(n) x(j) > k1, k2, ...kn, ----> xc(j) = ki
J.L.Huertas SETI-03-04
Tr. 75
q Respuesta de un sistema discreto a una secuencia es otra secuencia:
q Secuencia en función de una base [δ(n)]:
q Respuesta a una secuencia δ(n):
q Respuesta de un sistema
y n( ) x n( )=
x n( ) x k( )δ n k–( )k ∞–=
∞∑=
δ n k–( ) h n k–( )→
y n( ) x k( )h n k–( )k ∞–=
∞∑ h k( )x n k–( )
k ∞–=
∞∑ x n( )*h n( )= = =
Sistemas Discretos

J.L.Huertas SETI-03-04
Tr. 76
q Respuesta de un sistema
y n( ) x k( )h n k–( )k ∞–=
∞∑ h k( )x n k–( )
k ∞–=
∞∑ x n( )*h n( )= = =
Ck(n)
f(t)
x(n)
A/D
xc(n)
SistemaDiscreto
xc(n)
SistemaDiscreto
xc(n)SistemaDiscreto
yc(n)
Sistemas y Señales Discretos

J.L.Huertas SETI-03-04
Tr. 77
q Forma General de la Ecuación que describe un circuito lineal invariante en el tiempo:
q En el caso continuo es posible “transformar” las e.d. y obtener la Función de Trans-ferencia en el dominio s
........... H(s) <---> h(t)
q ¿Es posible encontrar algo similar para secuencias y sistemas discretos?: h(n) <------> ???
aky n k–( )k 0=
N∑ bmx n m–( )
m 0=
M∑=
y n( ) bmx n m–( ) aky n k–( )m 1=
N∑–
k 0=
M∑=
Y s( )W s( )------------
b0sm b1sm 1– ... bm+ + +
sn
a1sn 1–
... an 1– s an+ + + +-------------------------------------------------------------------------------- H s( )= =
Sistemas Discretos
J.L.Huertas SETI-03-04
Tr. 78
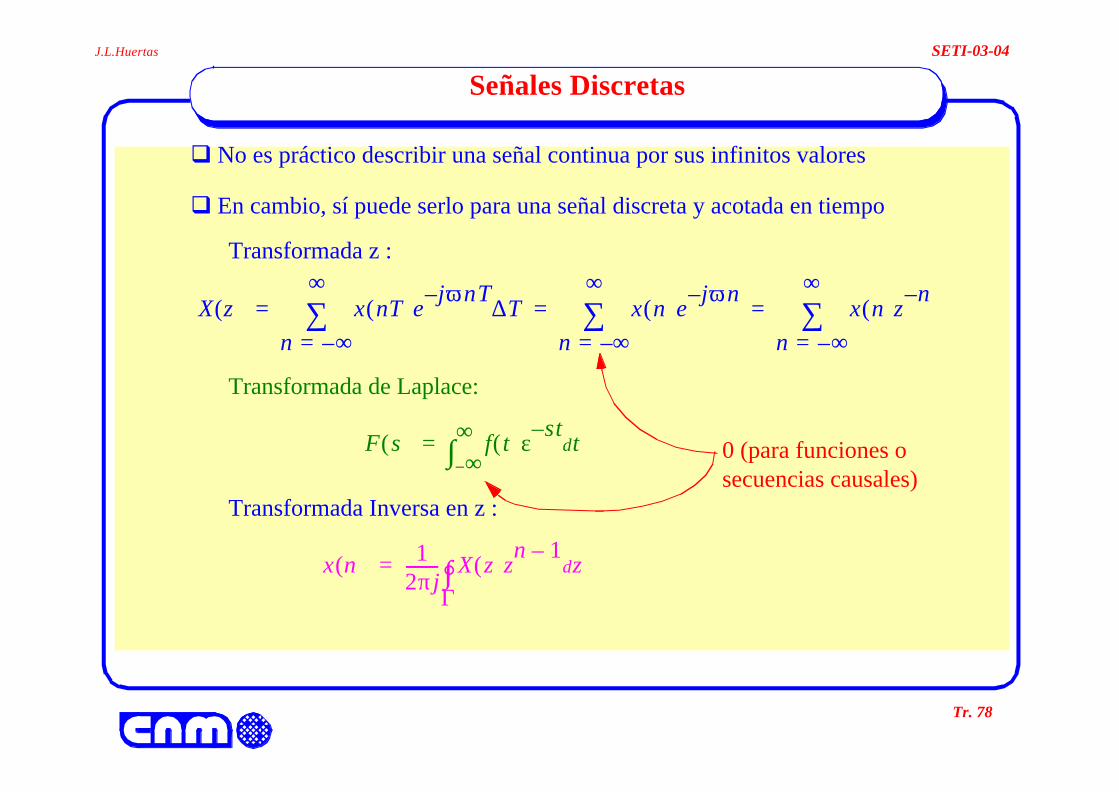
q No es práctico describir una señal continua por sus infinitos valores
q En cambio, sí puede serlo para una señal discreta y acotada en tiempo
Transformada z :
Transformada de Laplace:
Transformada Inversa en z :
X z( ) x nT( )ejωnT–
∆Tn ∞–=
∞∑ x n( )e
jωn–
n ∞–=
∞∑ x n( )z
n–
n ∞–=
∞∑= = =
F s( ) f t( )εst–
td∞–
∞∫=
x n( ) 12πj-------- X z( )z
n 1–zd
Γ∫°=
Señales Discretas
0 (para funciones o secuencias causales)

J.L.Huertas SETI-03-04
Tr. 79
Función Transformada Restricción
x(n) X(z)
x*(n) X*(z*)
x(-n) X(1/z)
anx(n) X(z/a)
nx(n) - z dX(z)/dz
δ(n) 1 |z| > 0
δ(n-k) z-k k > 0
u(n) |z| > 1
anu(n) |z| > a
zn–
n ∞–=
∞∑ z
n–
n 0=
∞∑
1
1 z1–
–----------------- z
z 1–-----------= = =
anzn–
n ∞–=
∞∑
zz a–-----------=
Algunas Transformadas
J.L.Huertas SETI-03-04
Tr. 80
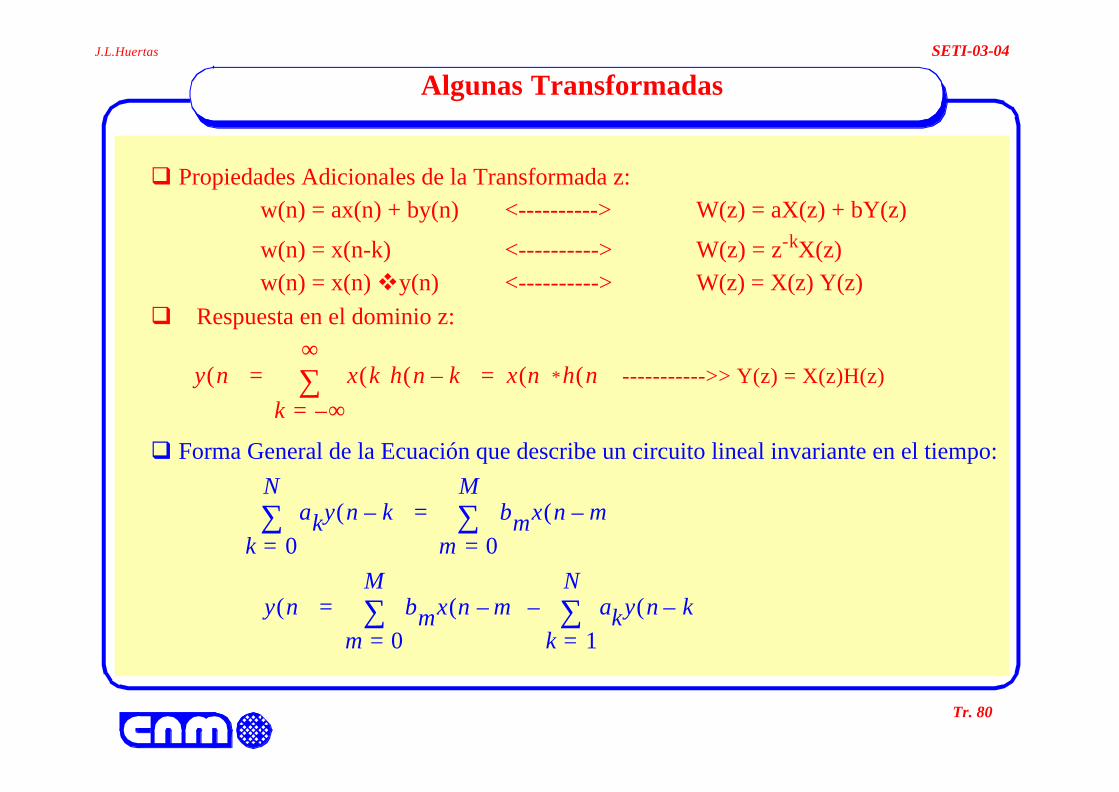
q Propiedades Adicionales de la Transformada z:w(n) = ax(n) + by(n) <----------> W(z) = aX(z) + bY(z)
w(n) = x(n-k) <----------> W(z) = z-kX(z)w(n) = x(n) vy(n) <----------> W(z) = X(z) Y(z)
q Respuesta en el dominio z:
----------->> Y(z) = X(z)H(z)
q Forma General de la Ecuación que describe un circuito lineal invariante en el tiempo:
y n( ) x k( )h n k–( )k ∞–=
∞∑ x n( )*h n( )= =
aky n k–( )k 0=
N∑ bmx n m–( )
m 0=
M∑=
y n( ) bmx n m–( ) aky n k–( )k 1=
N∑–
m 0=
M∑=
Algunas Transformadas
J.L.Huertas SETI-03-04
Tr. 81
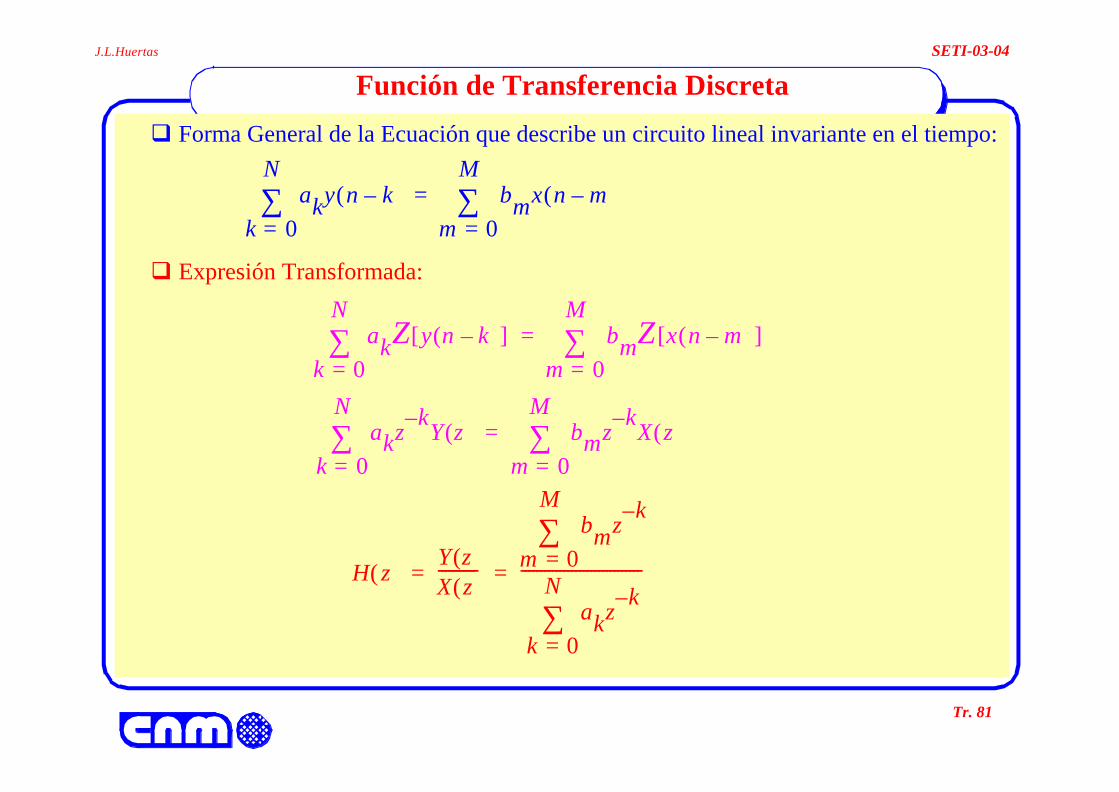
q Forma General de la Ecuación que describe un circuito lineal invariante en el tiempo:
q Expresión Transformada:
aky n k–( )k 0=
N∑ bmx n m–( )
m 0=
M∑=
akZ y n k–( )[ ]k 0=
N∑ bmZ x n m–( )[ ]
m 0=
M∑=
akzk–Y z( )
k 0=
N∑ bmz
k–X z( )
m 0=
M∑=
H z( )Y z( )X z( )-----------
bmzk–
m 0=
M∑
akzk–
k 0=
N∑
-------------------------------= =
Función de Transferencia Discreta
J.L.Huertas SETI-03-04
Tr. 82
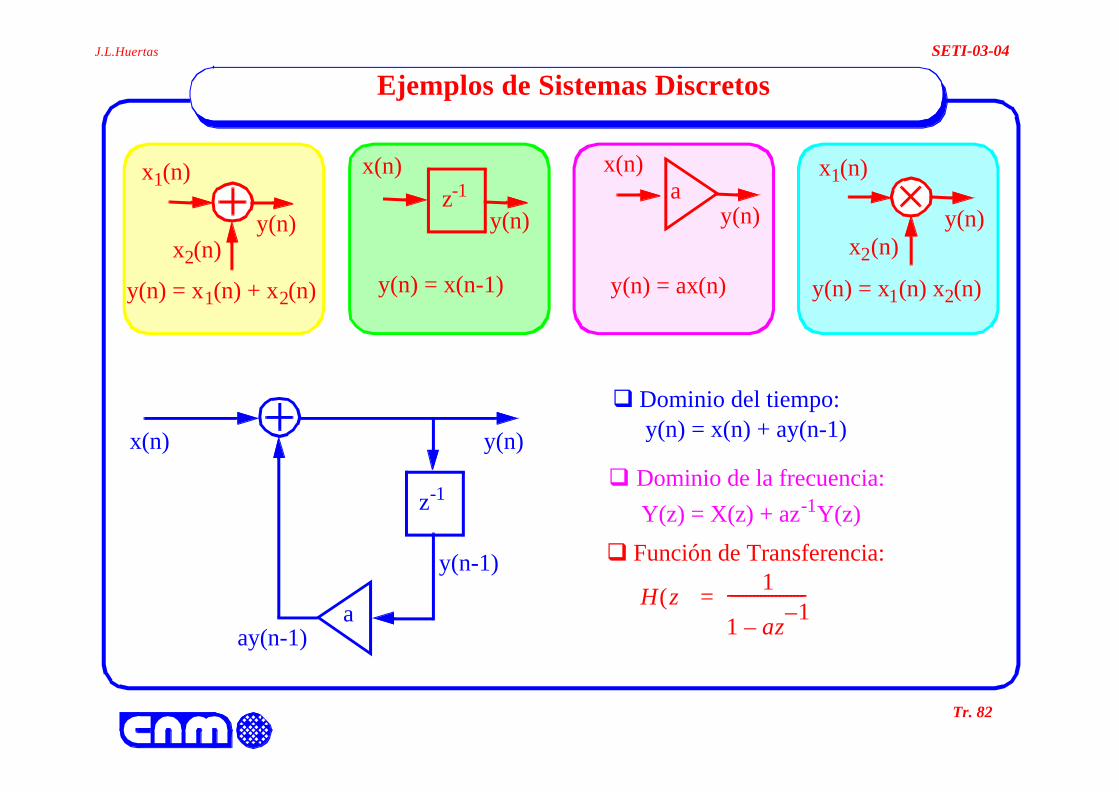
Ejemplos de Sistemas Discretos
z-1
z-1 a
a
x(n)
y(n)
x(n)
y(n) y(n)
x1(n)
x2(n)
y(n) = x(n-1) y(n) = x1(n) x2(n)y(n) = ax(n)
x1(n)
x2(n)y(n)
y(n) = x1(n) + x2(n)
x(n) y(n)
y(n-1)
ay(n-1)
q Dominio del tiempo:y(n) = x(n) + ay(n-1)
q Dominio de la frecuencia:Y(z) = X(z) + az-1Y(z)
q Función de Transferencia:
H z( )1
1 az1–
–---------------------=
J.L.Huertas SETI-03-04
Tr. 83
x(n) y(n)
z-1
z-1
z-1
z-1
z-1
z-1-a1
-a2
-aN-1
-aN
b0
b1
b2
bM-1
bM
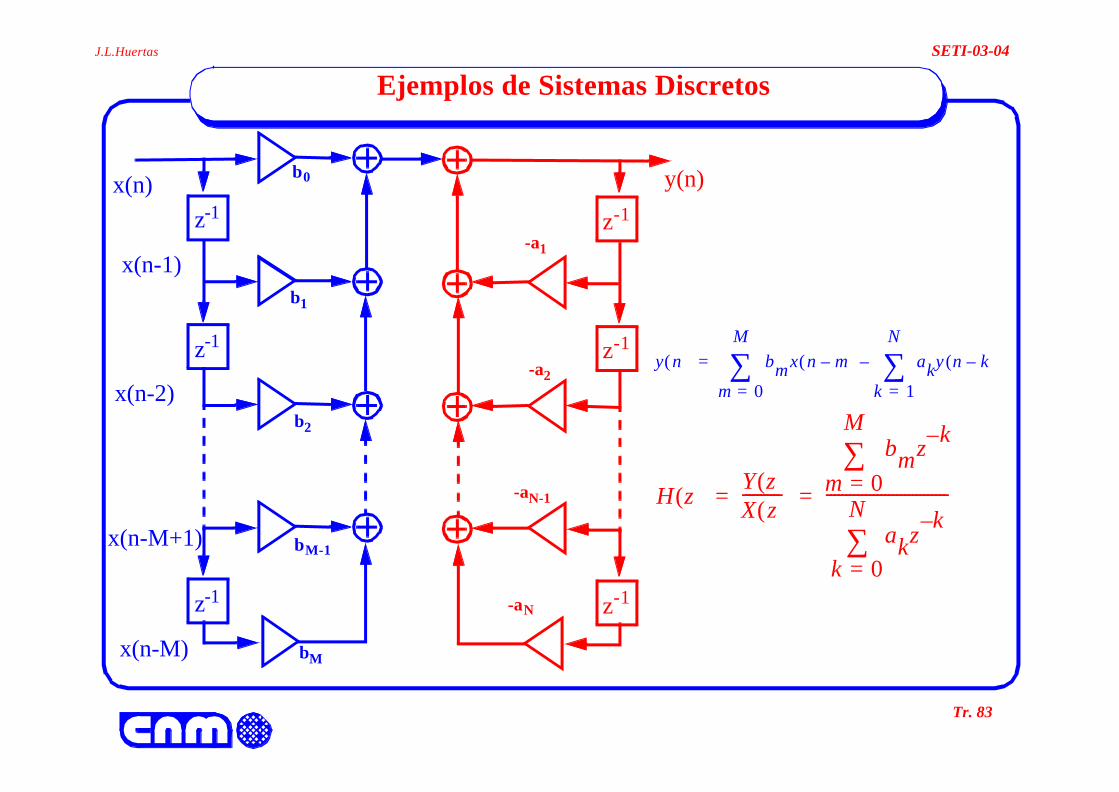
y n( ) bmx n m–( ) aky n k–( )
k 1=
N
∑–
m 0=
M
∑=
H z( )Y z( )X z( )-----------
bmz k–
m 0=
M∑
akzk–
k 0=
N∑
-------------------------------= =
Ejemplos de Sistemas Discretos
x(n-1)
x(n-2)
x(n-M)
x(n-M+1)

J.L.Huertas SETI-03-04
Tr. 84
z-1 z-1 z-1
bMbM-1bM-2b1b0
z-1 z-1
b3b2
x(n-1)
y(n)
x(n-2) x(n-M)x(n-M+1)x(n-M+2)x(n)x(n)
Ejemplos de Sistemas Discretos
y n( ) bmx n m–( )m 0=
M∑=
H z( )Y z( )X z( )----------- bmz
k–
m 0=
M∑= =

J.L.Huertas SETI-03-04
Tr. 85
n
x(n)
x n( ) ejωn
=
Respuesta a una Sinusoide

J.L.Huertas SETI-03-04
Tr. 86
; ---------------------------------->
La respuesta en frecuencia viene dada por H(z) evaluada en la circunferencia unitaria:
x n( ) ejωn
=
y n( ) x k( )h n k–( )
k ∞–=
∞
∑ h k( )ejω n k–( )
k ∞–=
∞
∑ ejωn
h k( )ejωk–
k ∞–=
∞
∑ x n( ) h k( )zk–
k ∞–=
∞
∑= = = =
y n( ) x n( )H z( )ejω
= H ejω
H′ ω( )=
Respuesta en Frecuencia
ω
H(1) = H´(0)
H(ejω) = H´(ω)H(-1) = H´(π)
Re (z)
Im (z) Im
Re (s)

J.L.Huertas SETI-03-04
Tr. 87
Polos, Ceros: Estabilidad
q Un sistema continuo es estable sii todos sus polos se encuentran en el semiplano izquierdo (s < 0)
q Un sistema discreto es estable sii todos sus polos se encuentran dentro del círculo unidad (|z| < 1)
Ejemplo: ------------------>
q Ceros: z1 = 1, z2 = -1 ; Polos:
H z( )b0 1 z
2––( )
1 a1z1–
a2z2–
+ +-------------------------------------------= H s( )
b s2
1–( )
s2
a1s a2+ +--------------------------------=
p1 2,
a12-----– j a2
a12
4-----–±=
H z( )
b0 1 zmz1–
–
m 1=
M∏
a0 1 pkz1–
–
k 1=
N∏
----------------------------------------------------
b0zN M– z zm–( )m 1=
M∏
a0 z pk–( )k 1=
N∏
------------------------------------------------------= =
J.L.Huertas SETI-03-04
Tr. 88
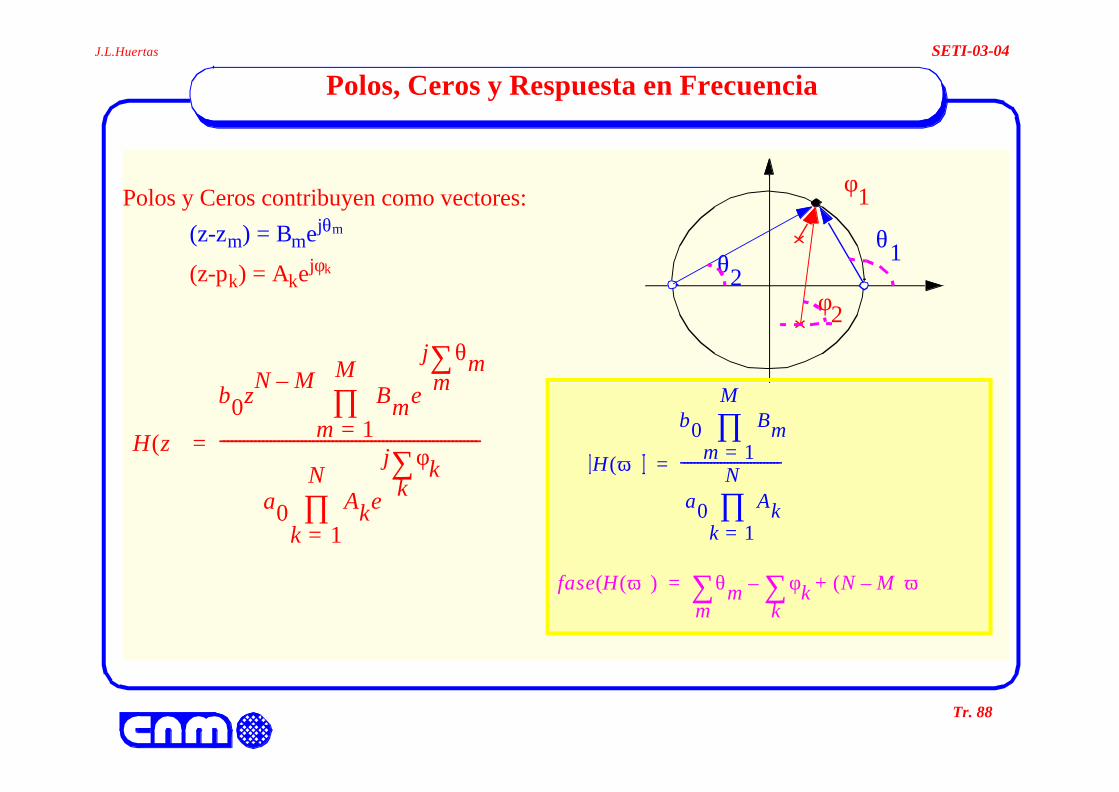
Polos y Ceros contribuyen como vectores:(z-zm) = Bmejθm
(z-pk) = Akejφk
H z( )
b0zN M–
Bme
j θmm∑
m 1=
M∏
a0 Ake
j φkk∑
k 1=
N∏
-------------------------------------------------------------------=H ω( )
b0 Bmm 1=
M
∏
a0 Akk 1=
N
∏------------------------------=
fase H ω( )( ) θm φkk∑– N M–( )ω+
m∑=
θ1θ2φ2
φ1
Polos, Ceros y Respuesta en Frecuencia

J.L.Huertas SETI-03-04
Tr. 89
Raices: z -(M+1) = 1; z=0
y n( ) 1M 1+-------------- x n m–( )
m 0=
M
∑=
H z( ) 1M 1+-------------- z
m–
m 0=
M
∑1 z
M 1+( )––
M 1+( ) 1 z1–
–
------------------------------------------= =
|H(ω)|
π/3 2π/3 π ω
H ω( )M 1+( )ω
2----sin
M 1+( ) ω2----sin
-------------------------------=
M = 5Im z
Re z
Polos, Ceros y Respuesta en Frecuencia
J.L.Huertas SETI-03-04
Tr. 90
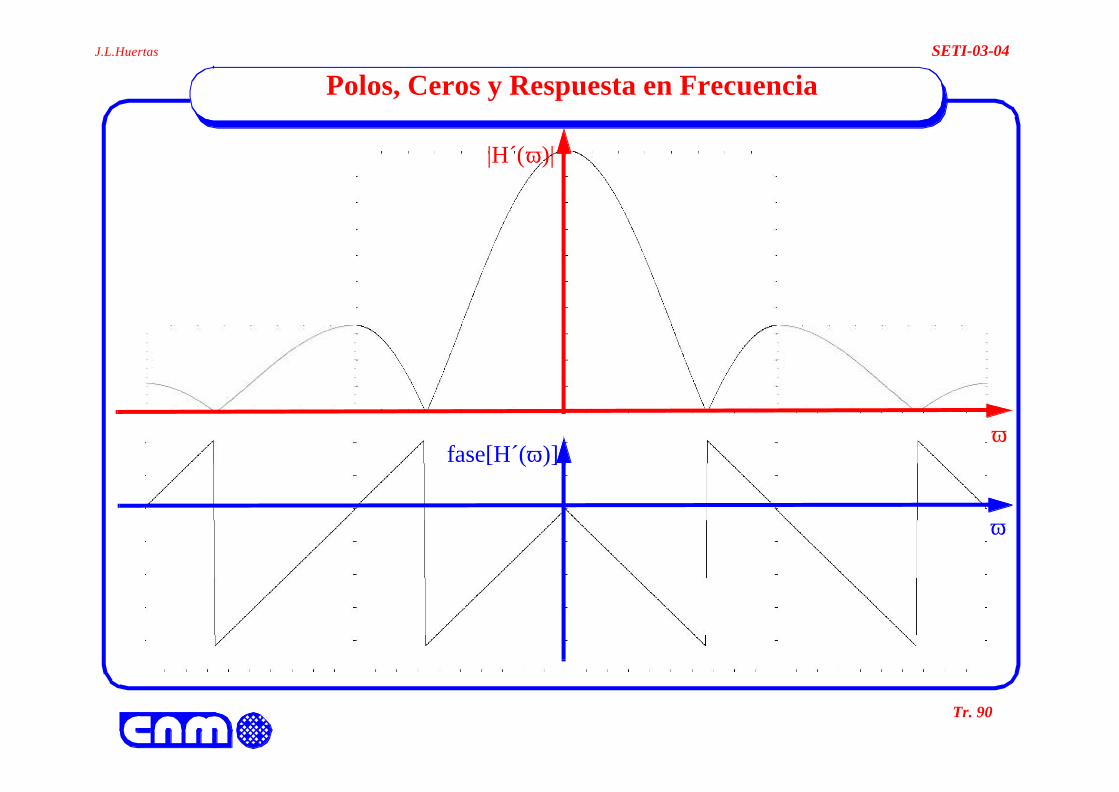
Polos, Ceros y Respuesta en Frecuencia
ω
|H´(ω)|
ω
fase[H´(ω)]
J.L.Huertas SETI-03-04
Tr. 91
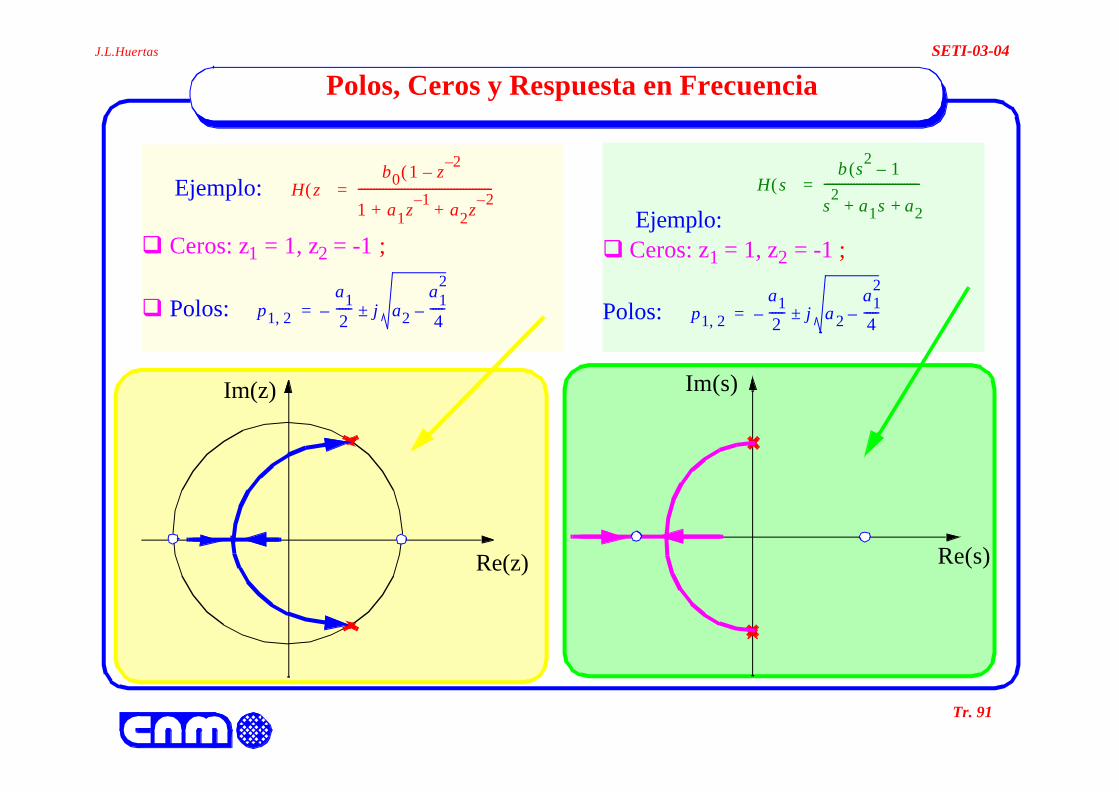
Ejemplo:
q Ceros: z1 = 1, z2 = -1 ;
q Polos:
H z( )b0 1 z
2––( )
1 a1z1–
a2z2–
+ +-------------------------------------------=
p1 2,
a12-----– j a2
a12
4-----–±=
Ejemplo: q Ceros: z1 = 1, z2 = -1 ;
Polos:
H s( )b s
21–( )
s2
a1s a2+ +--------------------------------=
p1 2,
a12-----– j a2
a12
4-----–±=
Polos, Ceros y Respuesta en Frecuencia
Re(s)
Im(s)
Re(z)
Im(z)

J.L.Huertas SETI-03-04
Tr. 92
y(n)
z-1
z-1
-a1
-a2
1/2
-
+x(n) v1(n)
v2(n)
v3(n)
v1(n) = v3(n) + x(n)/2v2(n) = v1(n-2)v3(n) = - a1v1(n-1) -a2[v2(n) + x(n)/2]y(n) = v1(n) - v2(n)
¿Cómo obtener las ecuaciones en ambos dominios?
Modelo de un Sistema Discreto

J.L.Huertas SETI-03-04
Tr. 93
¿Qué sabemos hasta ahora?
Sistemas Continuos: H s( )
Kjl
s pj+( )l
--------------------l 1=
qj∑
j 1=
n∑
Y s( )W s( )------------
bjsj
j∑
akk∑ s
k-----------------= = =(polos, ceros, ...)
Señales Continuas: ; g θ( ) ckejkθ
k ∞–=
k ∞=∑= G ω( ) 1
2π------ g τ( )e
jωτ–ωd
∞–∞
∫=
x t( ) ωt( )sin=
Sistemas Discretos: (polos, ceros, ...)
Señales Discretas: x n( ) x k( )δ n k–( )k ∞–=
∞∑=
H z( )Y z( )X z( )-----------
bmzk–
m 0=
M∑
akzk–
k 0=
N∑
-------------------------------= =
¿No hay modelo en el dominio de la frecuencia?

J.L.Huertas SETI-03-04
Tr. 94
x*
t( ) x nT( )δ t nT–( )n ∞–=
∞∑=
x t( )
x nT( )
Muestreo de una Señal Continua (dominio t)
S/H
t
t
t
t
J.L.Huertas SETI-03-04
Tr. 95
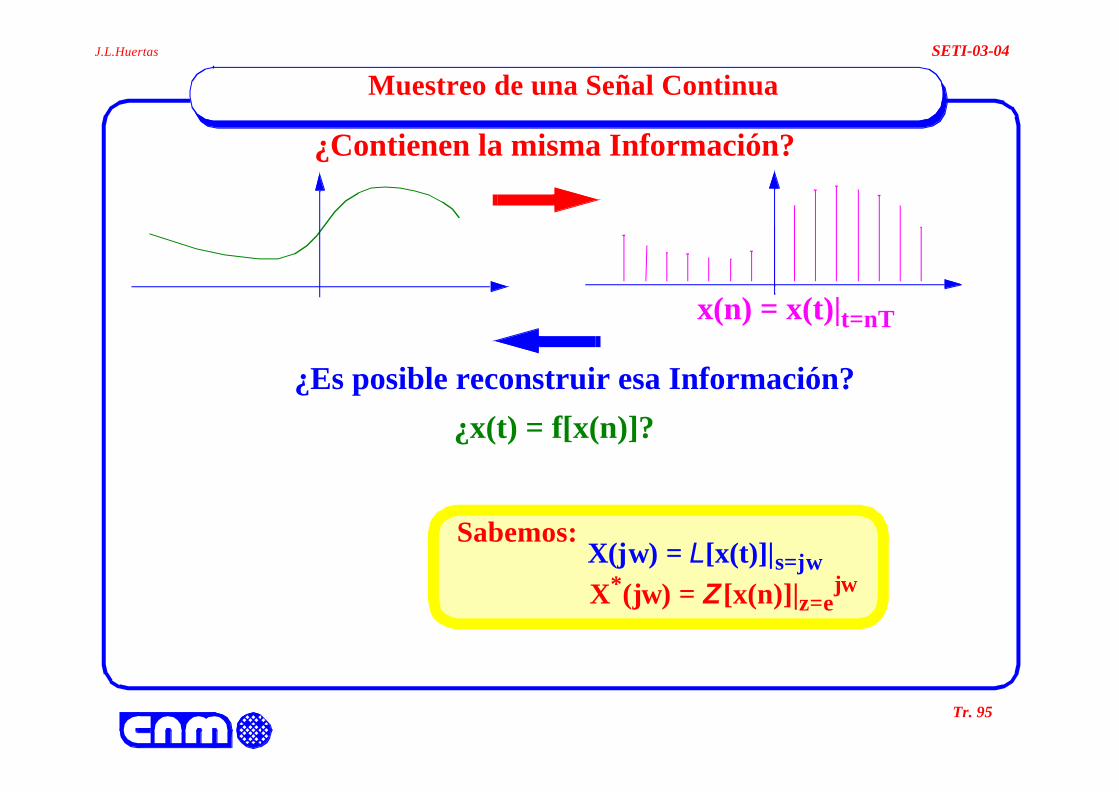
Muestreo de una Señal Continua
¿Contienen la misma Información?
¿Es posible reconstruir esa Información?
x(n) = x(t)|t=nT
¿x(t) = f[x(n)]?
Sabemos: X(jω) = L[x(t)]|s=jωX*(jω) = Z[x(n)]|z=e
jω
J.L.Huertas SETI-03-04
Tr. 96
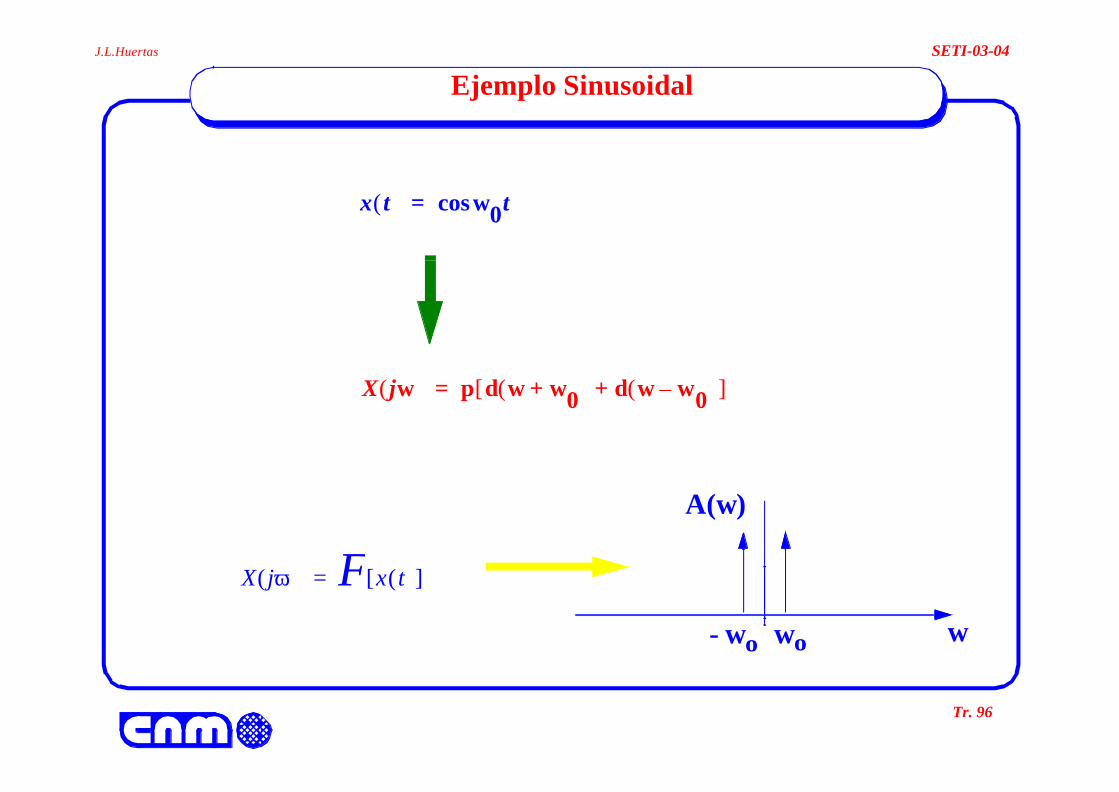
Ejemplo Sinusoidal
ω−ωo
X jω( ) F x t( )[ ]=
Α(ω)
ωo
x t( ) ω0tcos=
X jω( ) π δ ω ω0+( ) δ ω ω0–( )+[ ]=
J.L.Huertas SETI-03-04
Tr. 97
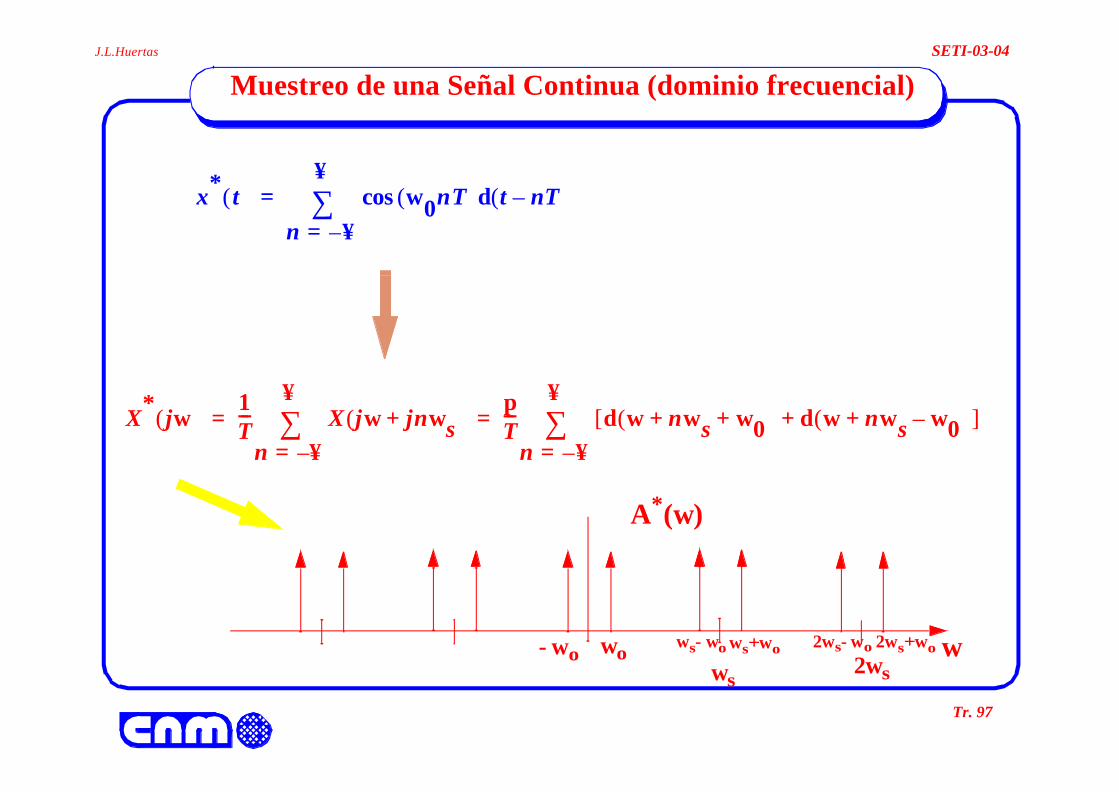
X*
jω( )1T--- X jω jnωs+( )
n ∞–=
∞∑
πT--- δ ω nωs ω0+ +( ) δ ω nωs ω0–+( )+[ ]
n ∞–=
∞∑= =
x* t( ) ω0nT( )cos δ t nT–( )n ∞–=
∞∑=
Muestreo de una Señal Continua (dominio frecuencial)
ωs
ω−ωo ωoωs−ωo ωs+ωo 2ωs−ωo 2ωs+ωo
2ωs
Α∗(ω)
J.L.Huertas SETI-03-04
Tr. 98
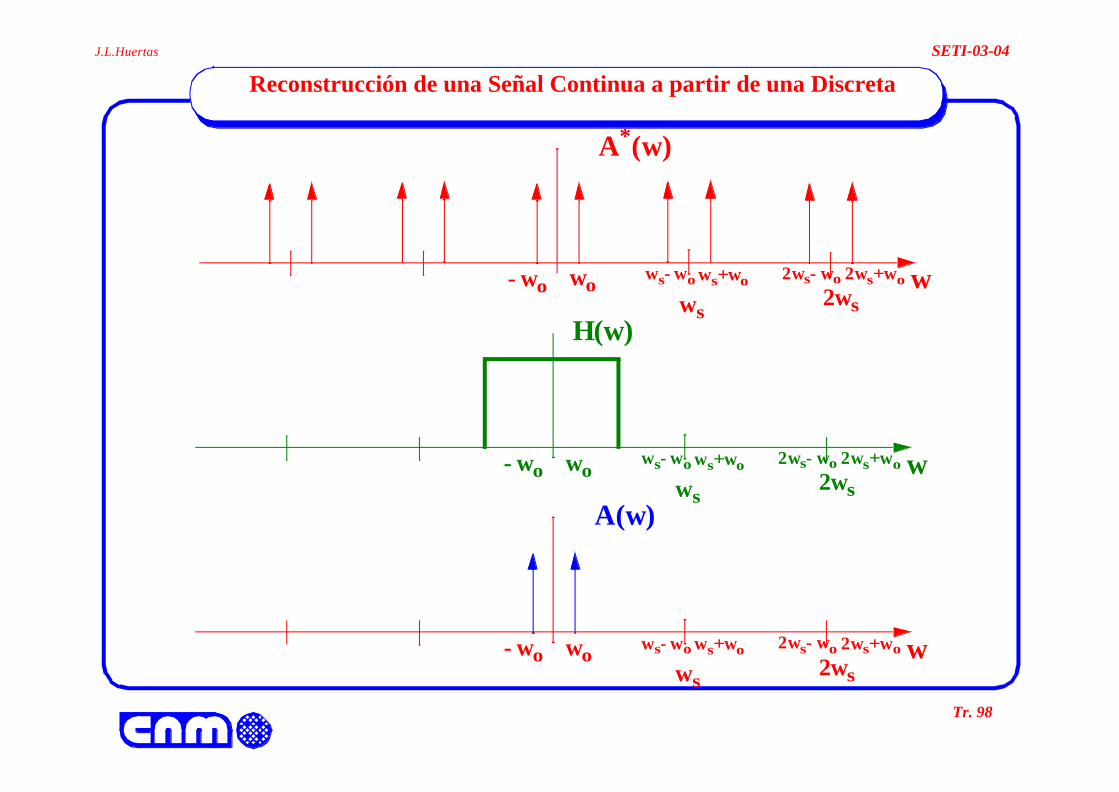
Reconstrucción de una Señal Continua a partir de una Discreta
ωs
ω−ωo ωoωs−ωo ωs+ωo 2ωs−ωo 2ωs+ωo
2ωs
Α∗(ω)
ωs
ω−ωo ωoωs−ωo ωs+ωo 2ωs−ωo 2ωs+ωo
2ωs
Η(ω)
ωs
ω−ωo ωoωs−ωo ωs+ωo 2ωs−ωo 2ωs+ωo
2ωs
Α(ω)

J.L.Huertas SETI-03-04
Tr. 99
ωs
ω−ωo ωoωs−ωo ωs+ωo 2ωs−ωo 2ωs+ωo
2ωs
Η(ω) ωs
ω−ωo ωoωs−ωo ωs+ωo 2ωs−ωo 2ωs+ωo
2ωs
Α(ω)
Α∗(ω)
ωs
ω−ωo ωoωs−ωo ωs+ωo 2ωs−ωo 2ωs+ωo
2ωs
“Aliasing”

J.L.Huertas SETI-03-04
Tr. 100
ωs
ω−ωo ωoωs−ωo ωs+ωo 2ωs−ωo 2ωs+ωo
2ωs
Η(ω) ωs
ω−ωo ωoωs−ωo ωs+ωo 2ωs−ωo 2ωs+ωo
2ωs
Α(ω)
Α∗(ω)
ωs
ω−ωo ωoωs−ωo ωs+ωo 2ωs−ωo 2ωs+ωo
2ωs
“Evitando Aliasing”