MAGLEV: modelado y control básicos

of 6
-
Upload
ricardohernandezvidal -
Category
Documents
-
view
222 -
download
0
Transcript of MAGLEV: modelado y control básicos
-
8/19/2019 MAGLEV: modelado y control básicos
1/12
DINÁMICA DE PROCESOS INDUSTRIALES, ELO-371 1
Tarea: Deslizador MagnéticoFelipe Andrés Gil Silva 201121019-0
Ricardo Andrés Hernández Vidal 201121035-2
Resumen—Modelado en detalle del sistema real deun deslizado magnético y su modelo linealizado, bajociertos parámetros seleccionados arbitrariamente. Dise ˜ node los controladores para cada uno de los subsistemas.Implementación y muestra de resultados de resultadosobtenidos en Simulink/MatLab.
Palabras claves— MAGLEV, LIM, linealizar
INTRODUCCI ÓN
En 1979 se implemento el primer tren de levitación
magnética (MAGLEV) de prueba, este causo un alto
interés, por la posibilidad teórica de generar un medio
de transporte que solo se ve afectado por la fricción
del aire. Hoy en dı́a la tecnologı́a ha madurado lo
suficiente para poder controlar los distintos sistemas
que involucran la levitación, suspensión y propulsión
de este, de manera que los trenes tipo MAGLEV se han
implementado en diversos paı́ses, preferidos por su alta
velocidad y su inmunidad ante condiciones climáticas.
En este documento se modelara en detalle un desliza-
dor magnético basado en el principio del MAGLEV,
especı́ficamente los sistemas de levitación y propul-sión. Estos se modelaran por separado, ya que son
subsistemas independientes.
El modelamiento de la levitación se lleva a cabo
realizando la 2da ley de newton de dicho subsistema,
en donde afectan solo la gravedad y la fuerza electro-
magnética inducida por el electroimán, desestimando
cualquier tipo de perturbación que cause volcamiento
del cuerpo. Además se ocupa la ley de kirchhoff
de voltajes, para modelar la corriente de actuación
teniendo como entrada el voltaje.
Para el caso del modelamiento de la propulsión se
analiza solo con la segunda ley de newton, en donde
las fuerzas involucradas, la fuerza inducida por el
motor linear de inducción (LIM) y el roce con el
aire, simplificando el sistema, de manera que se pueda
controlar la fuerza inducida por el LIM, teniendo como
entrada la corriente de estator en el eje coordenado q.
Una vez realizados los modelos se proceden a lineali-
zar, según la formula de Taylor.
Se finaliza diseñando los controladores, utilizando el
método de realimentación de estados, para cada uno
de los subsistemas. Se tiene en cuenta el buscar una
respuesta rápida, y a la vez robusta.
Finalmente se analiza el comportamiento del control
diseñado, ante la incorporación de errores de modeladodel 10 %.
DEFINICION DE VARIABLES Y CONSTANTES
Las variables a utilizar son las siguientes:
y: posición vertical del carro [m]i: corriente a través del electroimán [A]u: tensión aplicada al electroimán [V]L: inductancia del electroimán [H]iqs: corriente q a través del estator [A]vx: velocidad horizontal del carro [m/s]
ax: aceleración horizontal del cuerpo [m/s2
]Ψr: flujo rotor del LIM [W b]is: corriente estator del LIM [A]F p: fuerza de propulsión por LIM [N ]F r: fuerza de roce con el aire [N ]
Las constantes a utilizar son las siguientes:
Constantes conocidas:
g: gravedad terrestre 9.8[kg/s2]µ0: permeabilidad magnética del aire4π10−7[ W b
A·m]
ρ: densidad del aire 1.29[kg/m3]
Constantes usadas para simulación:
m: masa del carro 1[kg] p: pares de polos 2[−]N : número de vueltas del imán 100[−]ye: posición vertical de equilibrio del carro0.05[m]ve: velocidad horizontal de equilibrio del carro56[m/s]Ab: área de la base del carro 0.005[m]Af : área frontal del carro 0.0025[m]R: resistencia del imán a inducir 1[Ω]Lm: inductancia mutua del LIM 0.04[H ]Lr: inductancia del rotor del LIM 0.0424[H ]
Ψd
rnom: flujo d a través del rotor nominal del LIM0.8673[V m]
Nota: Durante el desarrollo de esta tarea el subı́ndice
“e” denotará que la variable se encuentra en el puntode equilibrio. Por ejemplo, ie es el valor de la corrientepor el electroimán en equilibrio.
-
8/19/2019 MAGLEV: modelado y control básicos
2/12
2 DINÁMICA DE PROCESOS INDUSTRIALES, ELO-371
I. MODELADO F ÍSICO
I-A. Levitaci´ on
La levitación del carro se realiza mediante imanes
permanentes contenidos en el mismo que propician
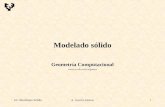
una fuerza electromágnetica F e repulsiva cuando sele aplica una tensión u. En la Figura 1 se muestrael modelo para una masa pequeña perteneciente al
carro. Dicho modelo se puede extender al carro entero
mediante superposición.
Figura 1. Esquema del modelado f ı́sico para la levitación deldeslizador magnético
En la Figura 1 se puede apreciar que el electroimán
está contenido en el carro. Además existen dos dinámi-
cas incluı́das: la conservación de momentum vertical
del carro y la ecuación del electroimán entre el voltaje
u y la corriente i. Para la primera, según la segundaLey de Newton, la ecuación dinámica que modela la
posición y se muestra en la siguiente ecuación
mÿ = F e − mg (1)
Donde la fuerza electromagnética es
F e = µ0N
2A
4 ·
i2
y2 (2)
Por simplicidad algebráica se puede definir C =µ0N
2A4
, y despejando la posición se tiene:
ÿ = C
m
i2
y2 − g (3)
Por otra parte, la ecuación dinámica del electroimán
es la siguiente
u = R · i + d(L · i)
dt = R · i +
dL
dt · i +
di
dt · L (4)
Donde L representa la inductancia equivalente delelectroimán, que depende de C y de la distancia delcarro y se puede modelar
L = 2C
y (5)
Sustituyendo la ecuación (5) en (4)
u = R · i + 2C
y · i̇ −
2C · i
y2 · ẏ (6)
Combinando las fórmulas (3) y (6) se tiene el
sistema de ecuaciones que modela la levitación.
levitacion :
ÿ = C
mi2y2 − g
i̇ = u2C
y − R2C y · i + i·ẏ
y
(7)
Ahora bien, con el fin de analizar el comportamiento
del sistema en lazo abierto, se usará el punto de
equilibrio como punto de partida del mismo. El punto
de equilibrio es
equilibrio :
mg = C
i2e
y2e
ue = R · ie(8)
Por ejemplo, si se define un punto de equilibrio de
ye = 0.05[m] (5 centı́metros de suspensión) se tiene
equilibrio :
ye = 0.05[m]
ie = ye ·
mg/C = 39.49[A];ue = R · ie = 39.49[V ]
(9)
A continuación se simula el sistema en lazo abierto,
contenido en el archivo Levitacion lazoabierto.slx, cu-
yos diagramas de bloques se muestran en las Figuras2, 3 y 4.
Figura 2. Diagrama Simulink para el subsistema corriente en lazoabierto.
Figura 3. Diagrama Simulink para el subsistema posición en lazoabierto.
-
8/19/2019 MAGLEV: modelado y control básicos
3/12
DINÁMICA DE PROCESOS INDUSTRIALES, ELO-371 3
Figura 4. Diagrama Simulink para el sistema levitación completoen lazo abierto.
Note que el subsistema corriente no se puede simular
por separado, pues necesita de la entrada ẏ. Por lo quese estudiará el sistema completo en primer lugar. En
el punto de operación y sin perturbaciones, el sistema
se mantiene en equilibrio. Al introducir un escalón de
valor inicial 0 y valor final 50 %ue en t = 2[s] seobtienen las Figuras 5 y 6.
Figura 5. Corriente i ante una perturbación del punto de equilibrio
del 50 % del voltaje de equilibrio ue.
Figura 6. Posición vertical y ante una perturbación del punto deequilibrio del 50 % del voltaje de equilibrio ue.
Antes de los 2 segundos se puede notar que el
sistema es estable pues permanece en el punto de
equilibrio. Mientras que luego del escalón, la corriente
y la posición se vuelven inestables. Esto sucede con
cualquier tipo de perturbación, pues en lazo abierto el
sistema es inestable en cualquier punto fuera del punto
de equilibrio.
Adicionalmente, se calcula la respuesta del subsiste-
ma posición ante una perturbación de la corriente del
50 % con respecto al punto de equilibrio ie, la cualse muestra en la Figura 7. Se puede apreciar que el
subsistema es estable, lo cual se hace evidente en la
ecuación (3), pues se trata de un sistema con polos
conjugados con parte real cero, lo que se demostrará
en la linealización del sistema.
Figura 7. Posición vertical y ante una perturbación del punto deequilibrio del 50 % de la corriente de equilibrio ie.
I-B. Propulsi´ on
Para modelar la propulsión proporcionada por el
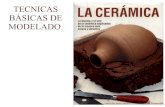
LIM, primero se debe entender como funciona este.
El LIM consiste en un motor de inducción como el de
la imagen 8 que es cortado por la mitad y estirado.
Figura 8. Esquema de un motor de inducción siendo cortado yestirado, LIM
El cuerpo a propulsar es el sı́mil lineal del rotor
del motor, en donde el torque generado por el motor
de inducción se transforma en la fuerza de propulsión.
Por definición el torque en el motor de inducción es el
dado en la ecuación (10).
T e = −3
2 p
LmLr
{Ψris} (10)
Con la finalidad de simplificar el motor de inducciónse trabaja en el eje coordenado dq. El eje coordenado
dq rota a la misma velocidad de Ψr, por ende las co-rrientes y flujos están sincronizados. En consecuencia
se reescribe T e y se obtiene la ecuación (11).
T e = 3
2 p
LmLr
Ψdrnomiqs = K T i
qs (11)
K T = 3
2 p
LmLr
Ψdrnom
Entonces la fuerza de propulsión proveniente del
LIM es:
F p = T e = K T iqs (12)
-
8/19/2019 MAGLEV: modelado y control básicos
4/12
4 DINÁMICA DE PROCESOS INDUSTRIALES, ELO-371
Para determinar la velocidad en función de la co-
rriente, se analiza el diagrama de cuerpo libre del
sistema.
Figura 9. Diagrama de fuerzas horizontales sobre el cuerpo.
Al aplicar la 2da ley de newton se tiene que:
max = F p − F r (13)
La fuerza de roce con el aire se define como:
F r = 1
2ρAf v
2x = K vv
2x (14)
K v = 1
2ρAf
Reescribiendo la ecuación (13), a partir de las ecua-
ciones (12) y (14)
v̇x = K T
m iqs −
K vm
v2x (15)
Para analizar el modelo de propulsión en lazo abier-
to, se debe definir el punto de equilibrio. La derivada
del modelo se iguala a 0, lo que resulta
vxe =
K T K v
iqse
Se tiene un grado de libertad para definir la
corriente y velocidad en equilibrio, por lo que se
define arbitrariamente la velocidad de equilibrio,
vxe = 30[m/s], por lo tanto iqse = 0.5912.
A continuación, se realiza la simulación del sistema
propulsor en lazo abierto, (Propulsor lazoabierto.slx),
su diagrama de bloques se muestra en la figura 10
Figura 10. Diagrama Simulink para el sistema propulsor en lazoabierto.
Se obtiene la siguiente respuesta ante un un escalón
de valor inicial 0 y valor final 50 %iqse en t = 2[s]mostrada en la figura
Figura 11. Velocidad horizontal ante una perturbación del punto deequilibrio del 50 % de la corriente de equilibrio i
q
se.
Como se puede ver ante el escalón ocurrido en 2
segundos, el sistema de lazo abierto intenta seguirlo
pero es demasiado lento para considerar esta respuesta
como la deseada. Pese a que el lazo abierto es estable,
pero tarda mas de lo buscado en alcanzar la referenciaes por ello que mas adelante se vera la forma de
controlar realimentando la salida, con la finalidad de
obtener la referencia deseada en un intervalo de tiempo
más pequeño.
II. LINEALIZACI ÓN
II-A. Levitaci´ on
En primer lugar, se obtendrá el sistema en variables
de estado. Se definen las siguientes variables de estado.
V.E.
x1 = y
x2 = ẏx3 = i
De donde, usando el sistema de ecuaciones 7 es
posible obtener:
V.E
ẋ1 = x2
ẋ2 = C m
x23
x21
− g
ẋ3 = u2C x1 −
R2C x1x3 +
x3x2x1
Cuyo punto de equilibrio se muestra en las ecuacio-
nes (8). Ahora bien, la inductancia en el modelo fı́sico
es una variable en función de la corriente y la posición
vertical. Sin embargo, la ecuación de LVK del electro-
imán, puede ser analizada considerando el movimiento
en un rango pequeño alrededor del punto de equilibrio.
En ese instante, la inductancia del electroimán puede
ser aproximada mediante:
Le = 2C
ye
La ecuación (4) del electroimán queda ahora como
u = Ri + Ledi
dt (16)
Que como se puede observar, es lineal y correspondea la ecuación de un circuito RL con inductancia
-
8/19/2019 MAGLEV: modelado y control básicos
5/12
DINÁMICA DE PROCESOS INDUSTRIALES, ELO-371 5
fija utilizando la corriente como variable de estado.
Reesscribiendo la ecuación 16 usando la transformada
de Laplace se tiene la función de transferencia entre el
voltaje y la corriente
Gi(s) = I (s)
U (s) =
1/L
s + R/L =
1/RLR
s + 1(17)
En el archivo Comparacion corrientes.slx se proce-
de a comparar el sistema linealizado con el sistema
f ́ısico para una perturbación del 50 %ue. El resultadose muestra en la Figura 12.
Figura 12. Comparación de las respuestas i del modelo (azul) y elmodelo linealizado (rojo).
En la Figura 12 se observa que el sistema linealizado
pierde la dinámica de la inductancia, sin embargo en
su valor medio coinciden.
Por otra parte, se linealizará el subsistema posición
usando serie de taylor truncada. De la ecuación (3) se
tiene
∆ÿ = 2C
m
ie
y2e
∆i − 2C
m
i2e
y3e
∆y (18)
Usando la transformada de Laplace y despejando la
variable de estado posición y se tiene
Gy(s) = Y (s)
I (s) =
2Ciemy2
e
s2 + 2Ci2e
my3e
(19)
Usando el diagrama situado en el archivo Compa-
racion posicion.slx se simula el modelo y el modelolinealizado.
Figura 13. Comparación de las respuestas y del modelo (azul) y elmodelo linealizado (rojo).
De la ecuación 19 se infiere que los polos del
subsistema posición son polos complejos conjugados
con parte real cero, lo que implica que el modo natural
es una sinusoidal con envolvente constante. De la
Figura 14 se puede apreciar que las respuestas del
modelo y del linealizado coinciden durante un par
de segundos y luego sufren un desfase y cambio de
frecuencias, pues luego vuelven a coincidir.
Usando las ecuaciones 16 y 18 se puede escribir el
sistema de levitación completo en variables de estado.
˙ x1x2x3
=
0 1 0
−2C m
i2e
y3e
0 2C m
iey2e
0 0 − RLe
x1x2
x3
+ 00
1Le
u
II-B. Propulsi´ on
Para este subsistema se define la siguiente variable
de estado y entrada.
V.E.
x4 = vx
Entrada
u4 = iqs
Linealizando la ecuación (15), entorno al punto de
equilibrio dado en el punto anterior
∆ v̇x = K T
m ∆iqs −
K vm
2vxe∆vx (20)
Aplicando la transformada de Laplace se obtiene la
función de transferencia.
Gv(s) = V (s)
I (s) =
K T m
s + 2vxeK vm
(21)
Del archivo Comparacion velocidad.slx se simula
el modelo y el modelo linealizado, con punto inicial
siendo el equilibro definido anteriormente, con un
escalón en el instante 2[s], de amplitud 50 % de lacorriente de equilibrio.
-
8/19/2019 MAGLEV: modelado y control básicos
6/12
6 DINÁMICA DE PROCESOS INDUSTRIALES, ELO-371
Figura 14. Comparación de las respuestas vx del modelo (azul) yel modelo linealizado (rojo).
La diferencia ocurrida puede ser explicada por el
valor final al cual escala cada uno, la respuesta al
modelo, la velocidad en estado estacionario se obtiene
con la raı́z de la corriente escalado por el factor
K T /K v, en cambio para el modelo linealizado elestado estacionario escala de forma lineal.
Reemplazando por las variables de estado, en la
ecuación (36):
ẋ4 =
−2x4
K vm
x4 +
K T m
u4 (22)
III. CONTROL
Para controlar los subsistemas propuestos, se usará
la técnica de realimentación de estados.
III-A. Levitaci´ on
Lo que intesesa controlar finalmente es la posición
vertical del carro mediante la aplicación de un
voltaje controlado en el electroimán. Entendido esto,
se diseñará en primer lugar un controlador con
realimentación de estado para el subsistema posición
y posteriormente, como el subsistema corriente
está internamente relacionado con el de posición
y naturalmente tiene una dinámica más rápida, se
controlará de manera aún más rápida y tal que en el
ancho de banda de interés tenga ganancia unitaria.
III-A1. Subsistema posici´ on: Recordando la ecua-
ción 18 se tiene
∆ÿ = 2C
m
iey2e
∆i − 2C
m
i2ey3e
∆y (23)
Que corresponde a la dinámica vertical del carro.
Ahora bien, la ley de control por realimentación de
estados es
i = k p(y∗ − y) + kd ẏ (24)
Note que se realimentan ambos estados involucados
en la ecuación: y , ẏ. Reemplazando la ecuación 24 en23
ÿ = 2Cie
my2e(k p(y
∗ − y) + kd ẏ) − 2C
m
i2ey3e
y (25)
Agrupando variables, aplicando transformada de La-
place y obteniendo la función de transferencia desde
y∗ hasta y
H y(s) = Y (s)
Y ∗ (s) =
2Ciemy2
e
k p
s2 − kd2Ciemy2
e
s + 2Ciemy2
e
k p + 2Ci2
e
my3e
Que corresponde a una función de transferencia de
segundo orden. Para elegir los parámetros, basta con
comparar la última ecuación con un sistema de segundo
orden estandar, como sigue
2ξωn = −kd2Cie
my2e
ω2n = 2Ciek p
my2e+
2Ci2emy3e
De donde
kd = −ξωnmy
2e
Cie
k p = ω2nmy
2e
2Cie−
ieye
Ası́, basta con elegir el coeficiente de amortigua-
miento ξ = 0.7 para obtener un sistema amortiguadoy con mayor robutez y ancho de banda, y por otra
parte τ = (ωnξ )−1 = 0.2[s] de donde ωn = 7.14.
Los parámetros restantes son conocidos si se elige un
punto de equilibrio adecuado. Entonces, si se escoge el
mismo punto de equilibrio, ahora punto de operación,
de las ecuaciones 9 donde ye = 0.05 se tiene
kd = −20.1496
k p = −687.0612
Ahora bien, con estas ganancias la función de trans-
ferencia del lazo cerrado queda como:
H y(s) = −341
s2 + 10s + 51.02 (26)
De donde se puede apreciar que la ganancia a
contı́nua no es unitaria. Para lograr esto se hace una
prealimentación de la referencia, tal que la función
de transferencia sea unitaria a cont́ınua, de valor
K = (H y(0))−1 = −0.1496 quedando la función de
transferencia finalmente como
H y(s) = K H
y(s) = 51.02
s2 + 10s + 51.02 (27)
Que tiene ganancia unitaria a contı́nua. Por otraparte, las ganancias kd y k p y son bastante elevadas y
-
8/19/2019 MAGLEV: modelado y control básicos
7/12
DINÁMICA DE PROCESOS INDUSTRIALES, ELO-371 7
es porque se está forzando un ξ = 0.7 lo que significauna ubicación de los polos complejos conjugados de
45◦ con respecto al origen del plano complejo, es decir,con estas ganancias se está forzando a tener polos con
parte real negativa (es decir estable) y de tal forma quela respuesta a escalón sea amortiguada.
Figura 15. Ubicación de los polos de lazo cerrado para el subsistemaposición controlado.
Dichos polos se mapean en el plano complejo en la
figura 15. Se puede observar que la ubicación de los
polos complejos conjugados es 5±5 j lo que corroboraξ = 0.7. Además tiene un overshoot de 4.6 %.
A continuación se simula el modelo real con el con-
trol implementado en el archivo Control posicion.slxy se compara con el sistema linealizado.
Figura 16. Diagrama de bloques correspondiente al control delsubsistema posición.
En la Figura 16 se puede apreciar el subsistema
posición de la Figura 3 pero esta vez contrlado por
las ganancias kd y k p además del sistema linealizadode la ecuación 27. En la Figura 31 se puede apreciar
la respuesta de ambos subsistemas ante una referencia
de y = 0.06[m] en 0.5[s] con condiciones iniciales elpunto de equilibrio.
Figura 17. Referencia (negro), respuesta del modelo no lineal (azul)y del modelo lineal (rojo) de la posición ante una referencia de0.06[m] en 0.5[s].
De la Figura 31 se puede apreciar que el modelo no
lineal ahora está controlado y su respuesta es parecida
a la del modelo lineal, salvo en el transiente donde
toma un overshoot de 7.2 %. Esto es debido a que elsistema no lineal tiene variables de estado al cuadrado,
por lo que responde más bruscamente ante variaciones
de estas variables. Adicionalmente, se grafican las
variables de Fuerza magnética aplicada al carro por
el electroimán y la velocidad vertical del carro.
Figura 18. Fuerza magnética aplicada al carro (arriba) y velocidadvertical del carro (abajo).
Note que la Fuerza magnética al momento de aplicar
la referencia sube bruscamente y luego decae lenta-
mente hasta igualar la fuerza gravitatoria. Mientras que
la velocidad aumenta en la forma de una parábola y
luego decae a cero. Esto f ́ısicamente coincide con lasimulación.
III-A2. Subsistema corriente: Por otra parte, recor-
dando la ecuación 16 del electroimán linealizada se
tiene
u = Ri + Ledi
dt = Ri +
2C
ye
di
dt
La ley de control por realimentación de estados es
u = ku(u∗ − kii)
Juntando ambas ecuaciones se tiene
u = ku(u∗ − kii) = Ri +
2C
ye
di
dt
-
8/19/2019 MAGLEV: modelado y control básicos
8/12
8 DINÁMICA DE PROCESOS INDUSTRIALES, ELO-371
Aplicando transformada de Laplace a esta última
ecuación y despejando la función de transferencia
desde u∗ hasta i
H i(s) = I (s)U ∗(s)
= ku
2C ye
s + kiku + R
= ku/(kiku + R)
2C ye(kiku+R)
s + 1(28)
Que corresponde a una función de primer orden.
Ahora bien, al principio de esta sección se dijo que
el lazo del subsistema corriente debı́a ser de ganancia
unitaria y más rápido que el del subsistema posición.
Pues bien, la ganancia de H i(s) a contı́nua es:
H i(0) =
ku
kiku + R = 1→ ku = kiku + R (29)
Por otra parte la constante de tiempo del sistema en
lazo cerrado es:
τ i = 2C
ye(R + kiku)
De donde, usando la ecuación 29 se tiene
τ i = 2C
ye(R + kiku) =
2C
yeku(30)
Finalmente usando la ecuación 30 para despejar kuy 29 para despejar ki
ku = 2C
τ iye(31)
ki = 1 − R
ku(32)
Note que las ganancias del control dependen sólo
de la elección de τ i y del punto de equilibrio ye. Ası́,como se desea un control más rápido que el lazo de
posición, se decide hacer 10 veces más rápido para
que se encuentren desacoplados τ i = τ /10 = 0.02[s].
Manteniendo el punto de equilibrio ye, las gananciasquedan
ku = 0.0314 (33)
ki = −30.8310 (34)
A su vez la función de transferencia del lazo cerrado
es
H i(s) = 1
0.02s + 1 (35)
Que tiene ganancia unitaria a contı́nua y constante
de tiempo 10 veces más rápida que el subsistemaposición, como se queŕıa lograr. A continuación se
simulará el control del subsistema corriente median-
te el archivo Control corriente.slx cuyo diagrama de
bloques se muestra en la Figura 19.
Figura 19. Diagrama de bloques correspondiente al control delsubsistema corriente.
Recuerde que el subsistema corriente no puede si-
mularse por separado, pues requiere de los datos de yy de ẏ. Se muestran las respuestas de la corriente parauna referencia en la entrada u del 50 % en 0.5[s] delpunto de equilibrio en la Figura 20.
Figura 20. Referencia de voltaje (negro) respuesta del modelo nolineal (azul) y del modelo lineal (rojo) de la corriente ante unareferencia de voltaje de 50%ue en 0.5[s].
Note que la corriente del sistema no lineal intenta
seguir la referencia pero con actuaciones muy eleva-
das. Esto es debido a que el subsistema posición se
encuentra en lazo abierto y el subsistema corriente
utiliza los datos del subsistema posición para calcular
la corriente, inestabilizando el sistema completo. Ahora
bien, recuerde que el objetivo del control de este
subsistema es que tenga ganancia unitaria en el ancho
de banda de interés, es decir u = i. Pues bien,
se grafica el voltaje de entrada al electroimán y lacorriente de salida en la Figura 21.
-
8/19/2019 MAGLEV: modelado y control básicos
9/12
DINÁMICA DE PROCESOS INDUSTRIALES, ELO-371 9
Figura 21. Respuesta de la corriente i (azul) ante entrada de voltajeu (rojo).
En la Figura 21 se observa que la corriente sigue
muy bien al voltaje, a pesar de estar la posición
en lazo abierto. Finalmente, note que el subsistema
corriente desacoplado de la posición corresponde
simplemente a un circuito RL, lo que se está haciendoentonces, es controlar este circuito, darle ganancia
unitaria a cont́ınua y acelerar su constante de tiempo
para desacoplar los lazos de control.
III-A3. Control del sistema levitaci´ on: Ahora se
implementa el control integrado de ambos subsiste-
mas para observar el desempeño del lazo de control
completo. La simulación se encuentra en el archivo
Levitacion control.slx y el diagrama de bloques co-
rrespondiente en la Figura 22.
Figura 22. Diagrama de bloques correspondiente al control delsistema Levitación.
Figura 23. Posición vertical del carro para el modelo no lineal (azul),modelo lineal (rojo) y referencia (negro) para el sistema completocontrolado.
En la Figura 23 se muestra la respuesta a escalón
del control. Se aplica un escalón, desde el puntode equilibrio, de valor 0.01[cm] en 0.5[s]. Se puede
apreciar que la respuesta del sistema lineal y no lineal
son muy parecidas, salvo en el peack donde el sistema
lineal alcanza altos valores.
Figura 24. Voltaje (rojo) y corriente (azul) aplicado al electroimánpara el sistema controlado.
Mientras que en la Figura 24 se aprecia que la ga-
nancia entre el voltaje y la corriente por el electroimán
es unitaria. Ası́, se está logrando controlar directamente
la corriente.
Figura 25. Fuerza magnética repulsiva (arriba) y velocidad carro(abajo) para el sistema controlado.
Observando las Figuras 25 y 18 es posible apreciar
que la Fuerza magnética con el sistema controlado
responde de manera más suave en comparación con
el sistema en lazo abierto.
Figura 26. Posición del modelo no lineal (azul) del modelo lineal(rojo) y referencia (negro).
Finalmente, en la Figura 26 es posible notar la
respuesta del modelo lineal y linealizado ante una
referencia de escalones de 1[cm] por sobre y pordebajo del punto de operación.
-
8/19/2019 MAGLEV: modelado y control básicos
10/12
10 DINÁMICA DE PROCESOS INDUSTRIALES, ELO-371
III-B. Propulsi´ on
Finalmente, para la propulsión se debe recordar la
ecuación (36).
∆ v̇x = K T
m ∆iqs − K
v
m 2vxe∆vx (36)
Esta modela la dinámica horizontal del carro. Según
la ley de control por realimentación de estados, se tiene
que:
iqs = −K hvx + K rv∗
x
Reemplazando en la ecuación anterior:
v̇x = K T
m (−K hvx + K rv
∗
x) − K v
m 2vxevx (37)
Se procede a aplicar la transformada de Laplace, yobtener la función de transferencia.
H v(s) = vx(s)
v∗x(s) =
K rK T m
s + K hK T +2K vvxe
m
=
K rK T K h(K T +2K vvxe)
mK h(K T +2K vvxe)
s + 1 (38)
Se tiene una función de transferencia de primer
orden. Al igual que en los puntos anteriores se busca un
ganancia continua unitaria, además de un control que
responda mas rápido que el obtenido a lazo abierto.
Entonces se tiene que:
H v(0) = K rK T
K h(K T + 2K vvxe) = 1 (39)
Para asegurar un control rápido, se elige arbitraria-
mente una constante de tiempo igual a 1 segundo.
τ v = m
K h(K T + 2K vvxe) = 1 (40)
Entonces,
K h = m
(K T + 2K vvxe) = 0.39194
Por lo tanto, K r tiene que ser:
K r = K h(K T + 2K vvxe)
K T = 0.40739
Con las ganancias ya determinadas, la función de
transferencia de lazo cerrado resultante es
H v(s) = 1
s + 1 (41)
Se procede a implementar el sistema obtenidos y
simularlos por medio de Simulink. El nombre de la
simulación es Control velocidad.slx. El esquema delmodelado controlado resultante es el siguiente:
Figura 27. Diagrama de bloques correspondiente al control delsistema Propulsión.
Se estudia la respuesta ante un escalón en el instante
2 [s], que escala desde la velocidad de equilibrio a 1.5
veces la velocidad de equilibrio.
Figura 28. Referencia de velocidad (negro) respuesta del modelono lineal (azul) y del modelo lineal (rojo) de la velocidad ante unareferencia de velocidad de 50 %vxe en 2[s].
Como se puede ver la respuesta del modelo no lineal
no alcanza la referencia, es por ello que se decide
utilizar el controlador PID, incorporado en Simulink.
Aquı́ se puede modificar las ganancias del PID con la
finalidad de fijar nuevamente una constante de tiempo
de 1 segundo, por medio de la herramienta Autotune.
El diagrama resultante, contenido en el archivo Con-
trol velocidad mod.slx, es el siguiente:
Figura 29. Diagrama de bloques modificada correspondiente alcontrol del sistema Propulsión.
El PID tiene las siguientes ganancias:
K p = 0.857334
K i = 0.171147K d = −0.20192
(42)
-
8/19/2019 MAGLEV: modelado y control básicos
11/12
DINÁMICA DE PROCESOS INDUSTRIALES, ELO-371 11
Lo que entrega la siguiente respuesta ante la misma
referencia utilizada anteriormente.
Figura 30. Referencia de velocidad (negro) respuesta del modelono lineal (azul) y del modelo lineal (rojo) de la velocidad ante unareferencia de velocidad de 50%vxe en 2[s] controlando el modelolineal con un PID.
Lográndose ası́ llegar a referencia buscado, de tal
manera que sea rápido.
IV. ERRORES DE MODELADO Y LÍMITES DE
CONTROL
Se considera, para el cálculo instantáneo del error,
el error porcentual como sigue:
e(t) = X nolineal − X lineal
X nolineal(43)
Donde X nolineal es la respuesta del sistema no linealy X lineal es la respuesta del sistema linealizado.
IV-A. Levitaci´ on
Recuerde que el sistema completo en lazo abierto
es inestable fuera del punto de equilibrio, mientras
que el modelo lineal no. Es por esto que no tendrı́a
sentido medir el error en lazo abierto entre el sistema
completo y el modelo del mismo en el entorno del
punto de operación, pues al transcurrir el tiempo el
modelo no lineal no tendrı́a salida acotada haciendo el
error infinito. Además, el subsistema corriente utiliza
los valores del subsistema posición, y como en lazo
abierto hay inestabilidad, no se puede medir el error
de modelado del subsistema aislado en lazo abierto.
Dicho lo anterior se medirá en lazo abierto el
error del subsistema posición (pues es estable, polos
conjugados con parte real cero) y luego se medirá el
error del sistema completo pero en lazo cerrado.
Para el subsistema posición, desde el punto de
equilibrio se va aumentando la corriente (que es la
entrada de este subsistema. La respuesta de la posición
se muestra en al Figura ?? mientras que el errorporcentual se muestra en la Figura ??
Figura 31. Comparación de respuestas para aumento de corriente.
Figura 32. Erorr porcentual instantáneo de la posición.
Se puede apreciar en las imágenes que en t = 7[s]aproximadamente, el error porcentual supera el valor
0.1 correspondiente al 10 % de error. Por lo que elpunto donde se excede 10 % de error porcentual es
y = 0.12[m]
i = 94.8[A]
Para encontrar el lı́mite inferior, ahora desde el punto
de equilibrio se hace descender la corriente siendo el
punto el siguiente
y = 0.028[m]
i = 23.7[A]
Ahora bien, para el sistema levitación completo
controlado se tiene que, dado que el control es robusto,
hay error estacionario 0, independiente de la referencia
(aunque ésta no tenga sentido fı́sico). Lo que se podrı́a
hacer, es medir el error en el transiente. Pues bien,
en las Figuras 33 y ?? se muestran las respuestas
del sistema lineal no lineal y del error porcentualrespectivamente.
-
8/19/2019 MAGLEV: modelado y control básicos
12/12
12 DINÁMICA DE PROCESOS INDUSTRIALES, ELO-371
Figura 33. Comparación de respuestas para aumento de corrientesistema controlado.
Figura 34. Erorr porcentual instantáneo de la posición.
y = 0.11[m]i = 87[A]
Se puede apreciar que el error porcentual no supera
el 10 %. Además el punto encontrado coincide con elencontrado anteriormente en lazo abierto. De manera
similar, se encuentra el lı́mite inferior tal que las
respuestas no tengan un error mayor del 10 %:
y = 0.02[m]
i = 15.8[A]
Para el lı́mite inferior el control mejora de manera
considerable con respecto al lazo abierto. Reccuerde
que a medida se va descendiendo el sistema se hace
más inestable aún por la inductancia equivalente L =2C
z .
IV-B. Propulsi´ on
Al igual que en la Levitación, se propone calcular
el punto tal que el error entre el sistema lineal y nolineal no supere el 10 % en lazo cerrado.
Figura 35. Comparación de velocidades ante aumento de referenciasistema controlado.
Figura 36. Comparación de respuestas para aumento de corrientesistema controlado.
CONCLUSIONES
REFERENCIAS