Manual de M de F- RosascoUNLP
400
FUNDAMENTOS DE MECANICA DE FLUIDOS Jorge Anibal Rosasco Ing. Aeronáutico UNLP Versión Informatizada _u6
-
Upload
emiliano-anselmini -
Category
Documents
-
view
269 -
download
9
Transcript of Manual de M de F- RosascoUNLP

FUNDAMENTOS
DE MECANICA DE FLUIDOS
Jorge Anibal Rosasco Ing. Aeronáutico UNLP
Versión Informatizada _u6

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1 Definiciones y Propiedades Versión preliminar.
1
1A.- INTRODUCCIÓN A LA MECÁNICA DE FLUIDOS Y PROPIEDADES. La mecánica de fluidos se fundamenta en la aplicación de los principios de la mecánica general Newtoniana y las leyes de conservación a las sustancias fluidas cuya definición precisa daremos en el punto [1.2] y se basa en dos conceptos centrales, la representación del fluido ya sea líquido o gaseoso como un medio continuo, y la característica particular de comportamiento a la deformación de estas sustancias que las diferencian de los sólidos elásticos y que denominamos “fluidez”, concepto que se vincula a una propiedad característica llamada viscosidad. 1.1.1 .- El significado de Continuo. Sólidos y Fluidos se caracterizan por sistemas de agregación moleculares sosteniendo su estructura en última instancia por fuerzas electromagnéticas atractivas y repulsivas que definen un estado de equilibrio y distancias características promedio entre sus componentes atómicos o moleculares. Para los sólidos las distancias interatómicas o intermoleculares son aproximadamente fijas y los componentes mantienen una estructura más o menos estable respecto a posiciones de equilibrio, estableciéndose un estado dinámico de red como si pequeños resortes unieran cada componente con sus vecinos y el sistema completo oscilara o vibrara respecto de las posiciones de equilibrio. Para líquidos no se forman las redes pero la proximidad entre moléculas, genera efectos de cohesión debido a interacción eléctrica formándose “grumos moleculares” que se mueven en direcciones diversas entre si e interactúan con pequeños choques. Finalmente para los gases las separaciones medias son mayores siendo los choques más enérgicos, sin actividad cohesiva y la migración mayores los intercambios de energía entre moléculas. Para una comprensión más clara de esto, observe la figura siguiente Fig. 1.1_1 , allí se representan dos moléculas de agua con su separación media o camino libre medio, y análogamente para el nitrógeno, que es el componente más abundante del aire, los órdenes de magnitud se dan en la figura en forma aproximada, donde tomamos como concepto, que la distancia intermolecular para líquidos es del orden del tamaño molecular y para gases del orden de 10 veces el tamaño molecular.
Fig. 1.1_1
Estas distancias y las diferencias entre líquido y gas, resultan de una interacción de fuerzas eléctricas y gravitatorias entre las moléculas, aunque el rol principal lo juegan las fuerzas eléctricas. Cuando las distancias entre moléculas son menores a una distancia de umbral ro , las fuerzas eléctricas son repulsivas debido a la impenetrabilidad al acercarnos a las superficies de los orbitales electrónicos de las moléculas y esta fuerza aumenta asintóticamente a medida que disminuye esta separación.
INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1 Definiciones y Propiedades Versión preliminar.
2
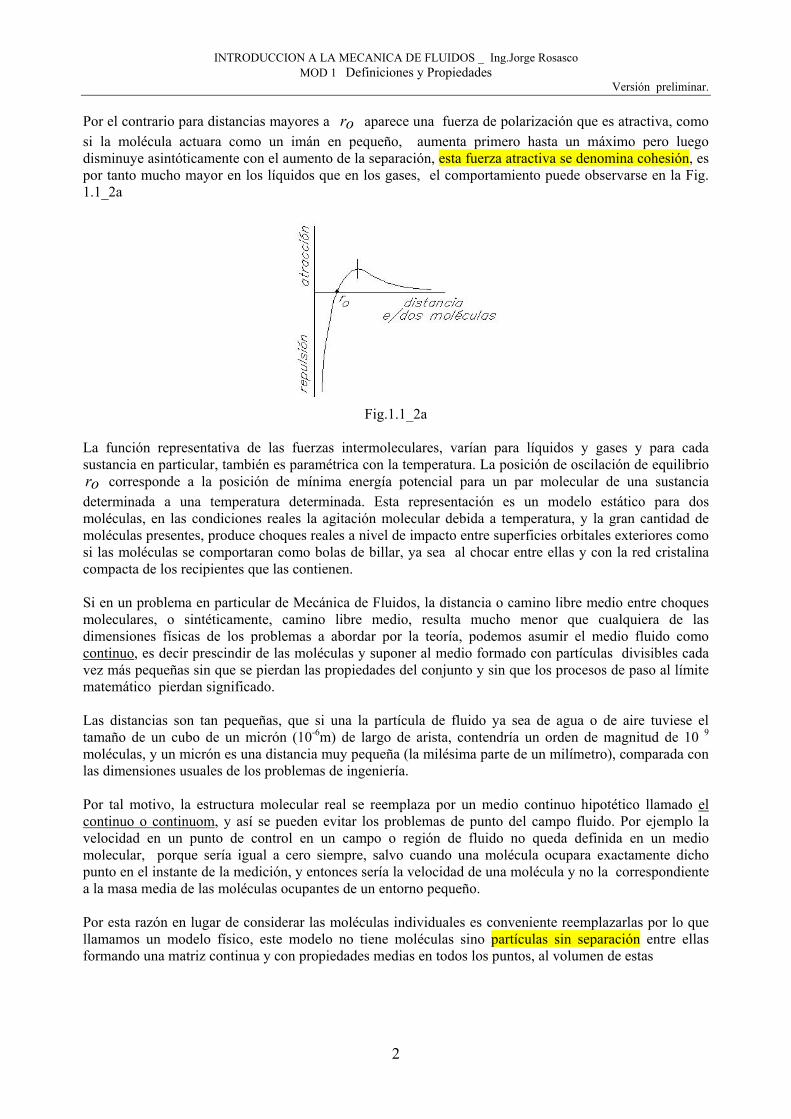
Por el contrario para distancias mayores a ro aparece una fuerza de polarización que es atractiva, como si la molécula actuara como un imán en pequeño, aumenta primero hasta un máximo pero luego disminuye asintóticamente con el aumento de la separación, esta fuerza atractiva se denomina cohesión, es por tanto mucho mayor en los líquidos que en los gases, el comportamiento puede observarse en la Fig. 1.1_2a
Fig.1.1_2a
La función representativa de las fuerzas intermoleculares, varían para líquidos y gases y para cada sustancia en particular, también es paramétrica con la temperatura. La posición de oscilación de equilibrio ro corresponde a la posición de mínima energía potencial para un par molecular de una sustancia determinada a una temperatura determinada. Esta representación es un modelo estático para dos moléculas, en las condiciones reales la agitación molecular debida a temperatura, y la gran cantidad de moléculas presentes, produce choques reales a nivel de impacto entre superficies orbitales exteriores como si las moléculas se comportaran como bolas de billar, ya sea al chocar entre ellas y con la red cristalina compacta de los recipientes que las contienen. Si en un problema en particular de Mecánica de Fluidos, la distancia o camino libre medio entre choques moleculares, o sintéticamente, camino libre medio, resulta mucho menor que cualquiera de las dimensiones físicas de los problemas a abordar por la teoría, podemos asumir el medio fluido como continuo, es decir prescindir de las moléculas y suponer al medio formado con partículas divisibles cada vez más pequeñas sin que se pierdan las propiedades del conjunto y sin que los procesos de paso al límite matemático pierdan significado. Las distancias son tan pequeñas, que si una la partícula de fluido ya sea de agua o de aire tuviese el tamaño de un cubo de un micrón (10-6m) de largo de arista, contendría un orden de magnitud de 10 9 moléculas, y un micrón es una distancia muy pequeña (la milésima parte de un milímetro), comparada con las dimensiones usuales de los problemas de ingeniería. Por tal motivo, la estructura molecular real se reemplaza por un medio continuo hipotético llamado el continuo o continuom, y así se pueden evitar los problemas de punto del campo fluido. Por ejemplo la velocidad en un punto de control en un campo o región de fluido no queda definida en un medio molecular, porque sería igual a cero siempre, salvo cuando una molécula ocupara exactamente dicho punto en el instante de la medición, y entonces sería la velocidad de una molécula y no la correspondiente a la masa media de las moléculas ocupantes de un entorno pequeño. Por esta razón en lugar de considerar las moléculas individuales es conveniente reemplazarlas por lo que llamamos un modelo físico, este modelo no tiene moléculas sino partículas sin separación entre ellas formando una matriz continua y con propiedades medias en todos los puntos, al volumen de estas

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1 Definiciones y Propiedades Versión preliminar.
3
partículas mínimas, se lo denomina un mesovolumen matemático1, cuyas propiedades representan el promedio estadístico de una enorme cantidad de moléculas del fluido real en el entorno de cada punto. Las propiedades se establecen entonces en primera aproximación como funciones continuas del campo.
Fig-1.1_2b
En la Fig.1.1_2b se observa que el valor de la densidad definida como el cociente de la masa de un entorno cerrado del continuo dividido por el volumen del entorno [ρ = m / v], dará valores constantes a medida que achiquemos el volumen de una región hasta un cierto valor vo , a la izquierda del cual la lectura tendrá fluctuaciones que dependerán del número de moléculas atrapadas en cada medición a medida que reduzcamos el volumen, es decir la medición no tendrá un sentido físico correcto a la izquierda de vo , el valor vo define el límite físico de los volúmenes para la teoría del continuo. Por ejemplo vo puede ser el volumen de un cubito de 10 - 7 m de lado, y dará aun medidas todavía confiables de densidad, sin embargo el límite matemático v → 0 , no tiene sentido físico porque la densidad sería un valor muy fluctuante para cada medición, entonces el límite matemático para la teoría habrá que tomarlo sobre mesovolúmenes del tamaño vo , y nuestro cuerpo de doctrina tendrá como límite a vo ; entre 0 y vo requeriremos otro cuerpo de doctrina que es la teoría cinética molecular. Otro ejemplo sería la velocidad de una partícula que puede tomarse con un promedio de velocidades típicas moleculares en el centro de un cubo de un décimo de micrón de lado (10 –7 m) ya que este contiene del orden de 10 6 moléculas, así que el promedio de velocidad en la región, o partícula de 1/10 micrón de lado, debería ser calculada promediando la velocidad de 106 moléculas, y esto nos da todavía una buena precisión, es lo que se hace al reemplazar la realidad física por los datos que pueden obtener nuestros elementos de medición usuales, todos los cuales trabajan por promediación.. 1.1.2.- Principios básicos que cumplen los medios continuos. Un conjunto de partículas de una región de fluido en reposo o movimiento definen un sistema, el sistema queda separado del resto llamado medio ambiente que lo rodea por un contorno real o imaginario. El medio ambiente lo pueden constituir partículas el mismo género o diferentes. El sistema así definido debe cumplir con las leyes de la Física y por tanto cumplir con las con los denominados leyes o principios básicos: 1 Mesovolumen es un volumen diferencial pero muy grande respecto al camino libre medio de las moléculas y muy pequeño respecto a las dimensiones usuales del problema físico, usualmente el mesovolumen se establece como un cubo de 10E-7 m de lado.

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1 Definiciones y Propiedades Versión preliminar.
4
1- Ley de conservación de masa.” En los procesos normales de Ingeniería (fuera del marco de la
teoría de la relatividad) la masa no se crea ni se destruye”
2- 2.1 Ley de conservación de la cantidad de movimiento lineal y 2.2 Ley de conservación de la cantidad de movimiento angular, la cantidad de Movimiento permanece constante en un sistema si no median fuerzas o
momentos exteriores, también conocidas como 1ª y 2ª leyes cardinales de la dinámica. La segunda ley de Newton de la mecánica clásica aplicada a movimientos lineales y rotacionales se derivan de estas leyes.
3- Ley de conservación de la energía o primer principio de la Termodinámica ”La energía total
de un sistema aislado permanece constante”
La aplicación de los principios básicos conduce a procesos físicos que se deben ajustar con dos principios básicos direccionales:
4- La flecha del tiempo, o principio de causalidad Los fenómenos ocurren siempre en el sentido del tiempo creciente. 5- El segundo principio de la Termodinámica.
A partir de estas leyes se definen ecuaciones de aplicación para el sistema. En la resolución de problemas se pueden agregar otras ecuaciones que provienen de los llamados principios secundarios por ejemplo:
6.- La ley de viscosidad de Newton. 7.- La ecuación de estado que relaciona P, v, y T en el caso de los gases. 8.- Incompresibilidad en el caso de los líquidos (y gases en ciertas condiciones). 9.- Límites físicos de los objetos sólidos que interactúan con el fluido.
Habitualmente las situaciones de flujo establecidas, salvo los casos más complejos como los de flujo turbulento, pueden tratarse usando 5 ó 6 variables independientes (tres componentes de velocidad y 2 ó 3 parámetros termodinámicos tales como presión, densidad y temperatura). Cuando se aplican los principios a sistemas de flujo de tamaño diferencial se arma un sistema de 5 ó 6 ecuaciones diferenciales que normalmente son las 3 ecuaciones escalares de la cantidad de movimiento, la ecuación de continuidad, la ecuación de la energía y la ecuación de estado para este volumen diferencial. La solución de las ecuaciones diferenciales que se obtienen, pueden resolverse para modelos de flujo simples, y permiten la obtención de los campos escalares y vectoriales que definen las propiedades y el comportamiento del flujo en cada punto de la región estudiada. 1.1.3.- Magnitudes Escalares, Vectoriales y Tensoriales. La hipótesis del continuo, nos permite establecer propiedades en el seno del fluido, que pueden definirse como funciones continuas de posición y tiempo, se denominan funciones de pinto o campos. Al hablar de las propiedades de los fluidos nos referimos específicamente a las propiedades termodinámicas que ya son conocidas de los cursos previos de Física y Termodinámica, por lo cual haremos solamente aquí un repaso somero.

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1 Definiciones y Propiedades Versión preliminar.
5
Como dijimos las propiedades son funciones continuas del espacio, lo que significa que la propiedad genérica de que se trate varía en forma continua y toma un valor único para cada punto del espacio y del tiempo (coordenadas de un suceso) en el entorno o región del espacio de que se evalúe el campo, indicaremos a una propiedad genérica cualquiera como N = N(x,y,z,t). Por ejemplo si la propiedad es la temperatura dentro del aula, asignamos una terna de referencia, por ejemplo la unión del piso y dos paredes en un rincón tomado la intersección de los planos como terna de referencia, y un cronómetro, luego colocamos un termómetro en un punto definido cualquiera de coordenadas (xo, yo, zo), y medimos la temperatura en un instante to, en general el valor cambiara de punto a punto y aun en el mismo punto con el transcurso del tiempo, por lo cual la temperatura en el entorno o región de definición que es el aula podrá definirse en general como una función del campo de cuatro variables, tres espaciales y una temporal T = T(x ,y ,z ,t). [1.1.1a] La temperatura es una propiedad escalar, porque se representa por un solo número que se lee en la escala del termómetro, pero también hay propiedades vectoriales que necesitan tres magnitudes para su representación, por ejemplo el campo de velocidades en los puntos de una región o entorno de fluido en movimiento, que se representaría como:
→→→→++= ktzyxwjtzyxvitzyxutzyxV ),,,(),,,(),,,(),,,( [1.1.1b]
La velocidad es un vector en cada punto, por ejemplo si el aula del ejemplo anterior tiene una ventana abierta y sopla una brisa el vector velocidad que medimos para cada punto en el aire dentro del aula, vendrá dado por una expresión como la [1.1.1b].
Podríamos expresar también el campo de velocidad como una propiedad vectorial, ),,,( tzyxVV→→
= que es una representación condensada de tres campos escalares separados , que son los componentes escalares de la velocidad en cada punto, con la cual armaremos el vector, estos tres campos escalares, en general serán variables con el tiempo, o sea:
≡=→→
),,,( tzyxVV ( , , , )( , , , )( , , , )
u u x y z tv v x y z tw w x y z t
===
Pero también el campo de velocidades se podría representar con el módulo del vector, dos ángulos directores y el tiempo, no obstante, siempre serán necesarias cuatro variables para la representación de una propiedad vectorial cualquiera del campo. Hay aun magnitudes en Física más complejas que requieren no uno ni tres campos escalares para su definición sino de 9 componentes escalares, por ejemplo el Momento de Inercia, la Tensión en un punto , la Deformación en un punto, estas magnitudes se denominan Tensoriales, y se representan a través de una matriz de 3 x 3 elementos, por ejemplo, la tensión en un punto del campo de un fluido real en movimiento viene dado por el tensor::
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
zzzyzxyzyyyxxzxyxx
Tστττστττσ

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1 Definiciones y Propiedades Versión preliminar.
6
Los jjσ representan aquí las componentes cartesianas de la tensión normal en un punto del campo para
un área dA en torno al mismo, y cuya normal tenga la dirección de un versor ∪n referido a la terna de
referencia, análogamente, los ijτ representan las componentes de las tensiones tangenciales en el punto
para el mismo dA. Cada una de las componentes escalares del tensor forma parte de una función continua de componente de tensión para cada punto del campo fluido y del tiempo. Daremos en el Mod 1B, de Estática de Fluidos, una definición precisa de tensión y del tema de las tensiones en el campo fluido. 1.1.4.- Propiedades de los medios fluidos. Las propiedades básicas termodinámicas en un fluido son: La densidad [ρ] (Kg/m3) es una medida de la resistencia inercial del fluido o resistencia a la aceleración, si la densidad en un entorno puede variar mucho con las fuerzas actuantes sobre los límites del entorno, los fluidos se llaman compresibles e incompresibles en caso contrario. Supongamos por ejemplo un cilindro con un pistón que comprime la sustancia fluida que ocupa el mismo, el fluido encerrado estaría en un entorno cuyo volumen puede variar, si la sustancia es agua, el volumen variaría muy poco aun para fuerzas aplicadas al pistón considerables, pero si la sustancia fuera aire, el volumen variaría aun para fuerzas pequeñas, en esta circunstancia diremos que el agua es bastante incompresible y el aire, bastante compresible. Para el aire la densidad varía también grandemente con la altura disminuyendo con esta. El volumen específico v =1/ρ se da a veces como propiedad, pero al estar vinculado con la densidad es en realidad la misma propiedad, definida de diferente manera. A veces se define la gravedad específica como un adimensional referido a la relación entre la densidad de la sustancia y la densidad del agua., lo que también es equivalente a la relación entre los pesos específicos,
.agua agua agua
gs gg
ρ ρ γρ ρ γ
= = =
La temperatura [T](ºK) es una manifestación de la energía cinética molecular promedio en un punto del entorno, a mayor energía cinética molecular mayor Temperatura. La presión [p] (New/m2=Pa) para un fluido en el que todas sus partículas se encuentren en reposo, es decir que no haya movimiento relativo entre las mismas, se define colocando en un punto del entorno un plano de área dA, con una determinada orientación la manifestación del promedio de las fuerzas de
choque molecular en dicha área definirá una fuerza→
dF , y una presión dAFdp /→
= Si cambiamos la orientación del plano dA sin cambiar de punto, obtendremos el mismo valor, 2 Hagamos el siguiente experimento mental, supongamos que colocamos un cuerpo facetado, por ejemplo un icosaedro (poliedro de 20 caras triangulares), sumergido en una posición fija en la masa de un fluido en
reposo, cada faceta recibirá una tensión normal o presión perpendicular a ella, dAFd /→
, 2 Daremos una definición más precisa y ampliaremos este concepto en el Módulo 1B.

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1 Definiciones y Propiedades Versión preliminar.
7
ahora si hacemos tender a cero este volumen del icosaedro (dv → 0), la presión sería la misma para todas las facetas diferenciales y todos estos vectores convergerán a un punto, por tanto la presión será la misma para cualquier dirección que tomemos en el punto sumergido en el que se ha transformado el icosaedro.
Si bien en la definición de presión en un punto aparece la presión como una magnitud vectorial, dAFd /→
, ella será la misma para cualquier dirección en el punto según vimos, para un fluido en reposo, por eso la presión estática se considera isotrópica e independiente de la dirección en cada punto de un fluido en reposo y podremos trabajar con ella como una magnitud escalar. Como veremos luego, cuando el fluido de la región o entorno no está en reposo relativo, y unas partes del mismo se mueven relativamente con respecto a otras, aparecen las tensiones tangenciales sobre la superficie de las partículas fluidas, y el concepto de isotropía de presiones se cumple solamente en primera aproximación cuando se toma como presión termodinámica al promedio de las tres componentes de las tensiones normales a tres caras ortogonales que rodean al punto )(3/1 zzyyxxp σσσ ++= a este promedio se lo llama a veces tensión volumétrica.
La velocidad, [ ]V→
[m/seg] puede ser definida como una propiedad cuando se aplica a una partícula ya integrada como un mesovolumen, el centro de masa de la partícula se asocia a un punto del campo fluido, a veces la velocidad se asocia al cociente del impulso sobre la masa de la partícula.
La cantidad de movimiento [ ]P→
[Kg m/seg] es el producto de la masa de la pequeña región, partícula o mesovolumen, por la velocidad de su centro de masa en el instante considerado.el producto es tambien igual al impulso total de la pequeña región. Otras propiedades de los fluidos son:
Energía interna por unidad de masa [ei].(Nm/Kg) Entalpía por unidad de masa: [ h = ei + p/ρ].(Nm/Kg) Entropía [s](cal/ºK) Calor específico para un líquido:[c](cal/KgºK) Calores específicos típicos para un gas: [cp] y [cv]. (cal/KgºK) Coeficiente de conductibilidad térmica: [h].(cal m /seg m2 ºK)
Se define a partir del calor trasmitido por unidad de tiempo a través de una pared sólida por
conducción ε
TAhH
Δ= , donde A es el área (m2) ΔT el gradiente térmico (ºK) y ε espesor de
la pared (m) despejando unidades resulta la unidad asignada a [h]
Coeficiente de compresibilidad vv
p/Δ
Δ−=κ [pa]
Se define como la razón entre la variación de presión necesaria para lograr un cambio de volumen Δv, sobre un volumen inicial v. Coeficiente de tensión superficial /W Asσ = Δ Δ [New.m/m2] ó [New/m]
Se define como el trabajo necesario a realizar sobre una interfase fluida para obtener un aumento unitario del área de la interfase. veremos este tema con más detalle en las notas complementarias de este Módulo. y destacaremos particularmente una propiedad ligada a la fricción interna:

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1 Definiciones y Propiedades Versión preliminar.
8
Coeficiente de viscosidad dinámica µ [New.seg/m2]
del cual hablaremos en detalle a continuación, ya que tiene mucha importancia para el estudio de los fluidos en movimiento. 1.2.- Definición de un Fluido, Fluidez y Fluidos Newtonianos. A diferencia de los sólidos, las sustancias fluidas no pueden resistir tensiones de tracción y corte, por pequeños que sean sin moverse, pero si tensiones de compresión. Ante la tracción por pequeña que sea dos interfaces fluidas en contacto se desbaratan, y en cuanto al esfuerzo cortante, las superficies se deslizan entre si, produciendo una cierta resistencia al corte mientras dure el movimiento. El movimiento se produce aunque la fuerza de corte sea infinitesimal, y una vez que el movimiento se produce y la fuerza cesa, las interfases no pueden restituirse por si solas a la condición inicial. El esfuerzo de tracción o compresión en un punto para un plano de área diferencial que lo contiene cuyo
versor director es →n se define como:
[ ]lim 0Fn
A Aσ
→→
= ± Δ →, siendo
→n normal al plano dA.
El esfuerzo de corte en un punto para un plano de área diferencial que lo contiene cuyo versor director es →n se define como:
[ ]lim 0Fs
A Aτ
→→
= Δ → , siendo →n normal al plano dA.
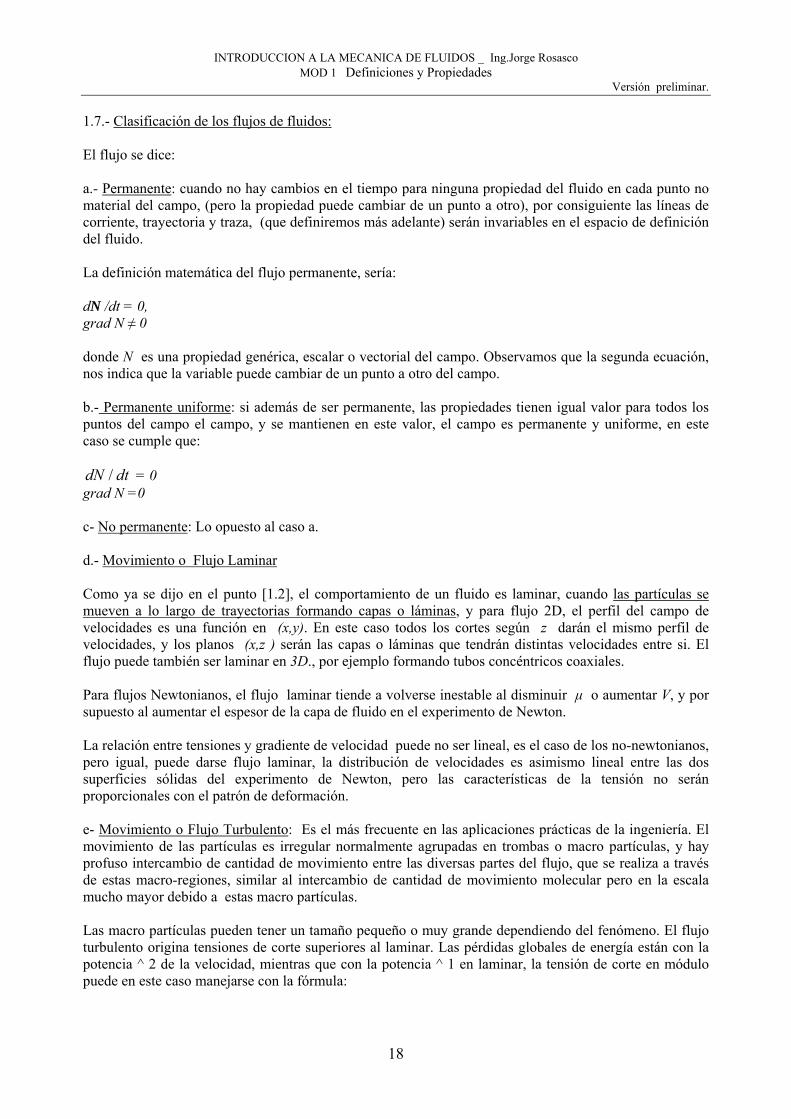
Fn y Fs son las componentes de la fuerza en las direcciones normal y tangencial al área. Cuando queremos establecer una diferencia básica entre sólido y fluido (líquidos y gases), en referencia a los fenómenos macro, y tratando a ambos como medios continuos, podemos hacerlo observando las diferencias de sólido y fluido en sus comportamientos de deformación al corte característicos. Si sometemos a un elemento cúbico de un sólido ubicado y adherido firmemente entre dos láminas a una tensión de cizalladura o cortante puro, el sólido experimentará una pequeña deformación, primero elástica y luego plástica; si nos concentramos únicamente en la deformación elástica, es decir el rango para el cual el elemento recupera su forma inicial al cesar el esfuerzo, un punto del sólido como A se trasladará al punto A’ y al cesar el esfuerzo, volverá a la posición A, cuando el prisma recupere su forma inicial. Las tensiones tangenciales o de corte, y las deformaciones angulares elásticas están relacionadas por una relación lineal de acuerdo a la ley de Hooke. Fig.1.2_1

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1 Definiciones y Propiedades Versión preliminar.
9
γτ GyxG ≅⎟⎟⎠
⎞⎜⎜⎝
⎛ΔΔ
=
Llamando τ a la tensión aplicada en módulo (fuerza por unidad de área), γ a la deformación angular, y G a la constante de proporcionalidad llamada también Módulo de Elasticidad transversal, obsérvese que se ha tomado la aproximación : γγγ tansin ≈≈ lo que es válido para ángulos muy pequeños. En esta definición se supone que el sólido posee continuidad macroscópica, e isotropía y que las tensiones no son suficientemente grandes como para pasar al rango plástico, así por ejemplo quedaría excluido como sólido un montón de arena pero no sus granos individuales. Una característica de la anterior situación es que aplicada la tensión y producida la deformación elástica el prisma alcanza el equilibrio y se mantiene quieto en su estado de carga mientras se encuentre presente la tensión, si la tensión cesa, el prisma vuelve a su posición y estado original no deformado, de acuerdo al comportamiento en rango elástico. Repetimos el experimento con un fluido. Al efecto ahora de obtener una representación física del comportamiento en los fluidos, consideremos el experimento aplicado a una pequeña región del fluido continua y homogénea, entre dos placas paralelas planas que cumplan con las siguientes características (Fig.1.2_2):
- área de contacto de la placa móvil con el fluido A, relativamente grande en relación al espesor de la capa fluida.
- espesor de la capa fluida muy pequeña h.
el experimento arroja los siguientes resultados:
- en t = 0 la lámina superior se pone en movimiento con una velocidad V., pequeña y constante.
- después de un tiempo Δt, se establece un flujo permanente desarrollado en capas o láminas (Flujo laminar) que definen un gradiente de velocidades constante con el espesor de magnitud:
/ /V h Vx y cte= ∂ ∂ = - es necesario mantener aplicada una fuerza F=cte para mantener V=cte.
Fig.1.2_2

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1 Definiciones y Propiedades Versión preliminar.
10
Asumimos que la placa inferior está quieta; y experimentalmente observamos que para mantener una velocidad constante en la placa superior, debemos aplicar una fuerza F = Cte, el movimiento que se obtiene es rectilíneo uniforme (MRU), la placa superior se mueve con una velocidad V, constante hacia la derecha, mientras que lo esperado cuando se aplica una fuerza constante a un cuerpo sería un movimiento uniformemente acelerado (MUA). Esto nos está indicando que el fluido está realmente ejerciendo una fuerza reactiva que compensa en forma opuesta la fuerza aplicada. En este caso si dejamos de aplicar la fuerza activa F , el movimiento se detiene, pero no se restituye a la posición inicial. Resumidamente, los fenómenos que se presentan aquí son: 1.- el fluido se pega en las superficies de ambas placas: fija y móvil, aun cuando estén perfectamente pulidas, o sea tendrá una velocidad V =Cte en la placa superior y V = 0 en la inferior. a esto se lo denomina principio de no-deslizamiento. 2.- la velocidad de la placa superior, después de un breve periodo transitorio, se mantiene constante, mientras una fuerza constante esté aplicada, es decir se establece un movimiento rectilíneo uniforme (aceleración = 0 ), lo que nos indica, recordando la segunda ley, que en el fluido está aplicada una carga igual y opuesta, y debe por tanto existir una tensión en la base de la tabla móvil τ = - F /A , siendo A el área de la base de la tabla en contacto con el fluido. 3.- se presenta un comportamiento tal que el patrón de velocidades de las capas fluidas paralelas entre las placas de los extremos a diferentes alturas desde la base es lineal (en nuestro caso la velocidad en cualquier punto entre las placas, es proporcional a la distancia de ese punto respecto de la placa inferior). Este patrón de capas deslizándose unas sobre otras define un tipo de flujo que se denomina: Flujo laminar. 4.- El esfuerzo de corte que se ejerce en la dirección x sobre la superficie de fluido ubicada en una cota y debido al fluido existente donde y es menor, se designa por yxτ .
El signo menos indica que para una posición de cota y, si en dicha posición el gradiente de velocidad es positivo, la partícula inmediatamente por encima de la cota se moverá con mayor velocidad y en cada región diferencial dA del plano para esta partícula inmediatamente superior a la cota “y” la tensión de cortante está dirigida en el sentido negativo de x. El primer subíndice para la tensión de corte yxτ , denota el plano en la que actúa la tensión, [a través del
nombre del eje perpendicular al plano en el que actúa la tensión], en este caso los planos fluidos son paralelos a x,z , este plano se designa con y , el segundo subíndice da la dirección de la tensión con referencia a la dirección del eje a la que es paralela, en este caso, x. La tensión de corte que crea una resistencia al movimiento es proporcional a la razón de cambio del ángulo de deformación es decir a la velocidad angular ( / tγ∂ ∂ ) o sea, en referencia a la figura 1.2_1 derecha:
[ ] / [ ] [ ]x Vx dVxtyx y y dyτ μ γ μ μ μΔ Δ
= − = − = − = −Δ Δ
i [1.2.1]
donde μ es el factor de proporcionalidad que se denomina viscosidad dinámica del fluido, y es una constante para la mayoría de los fluidos (líquidos y gases) dependiendo la misma en gran medida de la temperatura. La distribución de velocidades obtenida en este esquema entre la superficie móvil y la fija es lineal como se indica en la Fig. 1.2_2
INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1 Definiciones y Propiedades Versión preliminar.
11
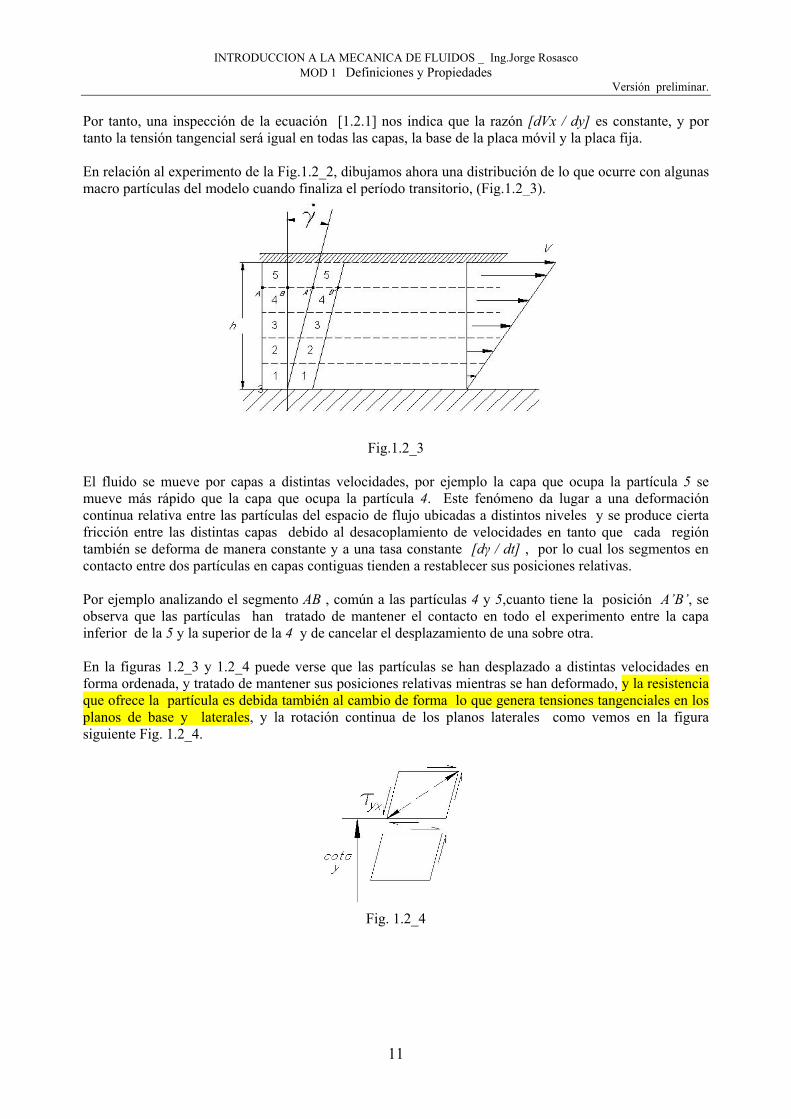
Por tanto, una inspección de la ecuación [1.2.1] nos indica que la razón [dVx / dy] es constante, y por tanto la tensión tangencial será igual en todas las capas, la base de la placa móvil y la placa fija. En relación al experimento de la Fig.1.2_2, dibujamos ahora una distribución de lo que ocurre con algunas macro partículas del modelo cuando finaliza el período transitorio, (Fig.1.2_3).
Fig.1.2_3
El fluido se mueve por capas a distintas velocidades, por ejemplo la capa que ocupa la partícula 5 se mueve más rápido que la capa que ocupa la partícula 4. Este fenómeno da lugar a una deformación continua relativa entre las partículas del espacio de flujo ubicadas a distintos niveles y se produce cierta fricción entre las distintas capas debido al desacoplamiento de velocidades en tanto que cada región también se deforma de manera constante y a una tasa constante [dγ / dt] , por lo cual los segmentos en contacto entre dos partículas en capas contiguas tienden a restablecer sus posiciones relativas. Por ejemplo analizando el segmento AB , común a las partículas 4 y 5,cuanto tiene la posición A’B’, se observa que las partículas han tratado de mantener el contacto en todo el experimento entre la capa inferior de la 5 y la superior de la 4 y de cancelar el desplazamiento de una sobre otra. En la figuras 1.2_3 y 1.2_4 puede verse que las partículas se han desplazado a distintas velocidades en forma ordenada, y tratado de mantener sus posiciones relativas mientras se han deformado, y la resistencia que ofrece la partícula es debida también al cambio de forma lo que genera tensiones tangenciales en los planos de base y laterales, y la rotación continua de los planos laterales como vemos en la figura siguiente Fig. 1.2_4.
Fig. 1.2_4

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1 Definiciones y Propiedades Versión preliminar.
12
Todo cuerpo al deformarse requiere de apoyo en las superficies de su interfase próxima, y esto es lo que genera las tensiones tangenciales, entonces la resistencia viscosa se manifiesta en parte por fricción y en parte en forma de esfuerzos tangenciales ante la presencia de una deformación producto de la velocidad horizontal de las partículas. 5.- el flujo laminar establecido por láminas paralelas que se deslizan unas sobre otras, tiende a desestabilizarse a medida que aumentan la velocidad de desplazamiento de la placa y/o la temperatura. Como resumen de todo lo anterior, definiremos como fluido a toda sustancia que no permanece en equilibrio ante una tensión de corte aplicada por pequeña que sea, y que no puede resistir esfuerzos de corte sin moverse. Esto se conoce como ley de viscosidad de Newton , está basada en principio en resultados experimentales, y establece que la tensión de corte es proporcional a la velocidad de deformación angular o lo que es equivalente al gradiente de la velocidad establecido, definiendo la constante de proporcionalidad como coeficiente de viscosidad absoluta o dinámica.
dVxyx dy
τ μ⎡ ⎤
= − ⎢ ⎥⎣ ⎦
[1.2.1]
Recíprocamente los fluidos que cumplen con esta ley (matemáticamente la ecuación .1.2.1) se denominan Newtonianos, de lo cual inferimos que algunos tipos de fluidos no la cumplen. A veces si se da por sobreentendida la dirección de las tensiones, se puede trabajar con el valor absoluto de la tensión, y con la fórmula 1.2.1 tomada en módulo con signo positivo, de hecho en muchos textos así la toman. La expresión [1.2.1] se puede generalizar como:
grad Vijτ μ→
= − [1.2.2]
cuando el fluido está en reposo, 0grad V→
= y en este caso no aparecen tensiones tangenciales, y solamente aparecen tensiones normales o presiones. En un fluido en reposo, o con un movimiento tal que no existe un movimiento relativo entre capas adyacentes, no habrá tensiones de corte ya que estará desprovisto de gradientes del tipo dVx/dy . De aquí se desprende que para el estudio de la estática de fluidos no hay que considerar fuerzas cortantes, y las únicas tensiones presentes son las normales o presiones, por eso el estudio es más simple en este campo que para los fenómenos de la dinámica de fluidos. 1.3.- Unidades de la Viscosidad. Despejando el coeficiente de viscosidad de la ecuación. [1.2.1], quedará expresado en: [unidades de viscosidad] = [ unidades de tensión] × [unidad de distancia] / [unidad de velocidad] en MKS la unidad es después de aplicar y simplificar [New.seg/m2], habitualmente se utilizan las unidades c.g.s , con lo cual la viscosidad queda expresada en: [dyn /cm2] × [cm] / [cm/seg] = [dyn seg / cm2] = poise ,

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1 Definiciones y Propiedades Versión preliminar.
13
el poise representa el nombre asignado a esta combinación de unidades, la unidad submúltiplo (Centipoise) poiseCp 210−= , se usa para caracterizar a las diversas sustancias, tiene la ventaja que con este sistema, las viscosidades típicas son fáciles de recordar, por ejemplo:
viscosidad del agua a 15°C es aproximadamente 1 cpoise , ~ 1.10 E-5 N seg /m2 viscosidad de los gases 10 -2 cpoise, para aire a nivel del mar y 15ªC = 1.79 E-6 Nseg/m2 viscosidad de los fluidos muy viscosos como la glicerina del orden de 103 cpoises,
Por supuesto, la viscosidad se puede definir en otros sistemas tales como el MKS o el Técnico. Para algunas aplicaciones se utiliza un parámetro denominado viscosidad cinemática que se define como el cociente entre la viscosidad dinámica y la densidad [ν =μ / ρ], en sistema cgs la unidad es: [dyn s / cm2] / [g / cm3] = [cm2 / seg] = stoke o sea las unidades cegesimales para viscosidad dinámica y cinemática adoptan nombres especiales, [poise] para viscosidad dinámica y [stoke] para viscosidad cinemática , como en general dan valores prácticos grandes se usan submúltiplos, [centipoise] = 1/100 poise, y [centistoke]= 1/100 stoke. 1.4..- Otra interpretación de la viscosidad su relación con la temperatura. Resulta también conveniente interpretar la [1.2.1] de otra forma, En las inmediaciones de la superficie que se mueve donde y = h , el fluido adquiere una cierta cantidad de movimiento [m.V], en la dirección positiva del eje x , y el fluido ubicado allí comunica a su vez parte de esta cantidad de movimiento a la capa adyacente inferior y así sucesivamente y por lo tanto tiene lugar una trasmisión de la cantidad de movimiento x a través del espesor en la dirección y , por consiguiente τ puede interpretarse como un flujo de cantidad de movimiento según y .
. . 1 . .= =[ ]c de m mV FFlujo de la c de mt A t A A
τ→ →
= =
Para la explicación de este fenómeno debemos apartarnos de la hipótesis de continuo y examinar a nivel molecular. Si imaginamos capas lineales de partículas deslizándose a diferentes velocidades, (como si fuesen dos trenes, uno que va sobrepasando al otro) separadas por dy y correspondiente a niveles diferentes, como en la Fig 1.4_1 arrojándose proyectiles una a la otra, (intercambio molecular) e intercambiando cantidad de movimiento por choques, las moléculas que provienen de una región rápida producen choques al ser introducidas en una región lenta y recíprocamente.
Fig.1.4_1
INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1 Definiciones y Propiedades Versión preliminar.
14
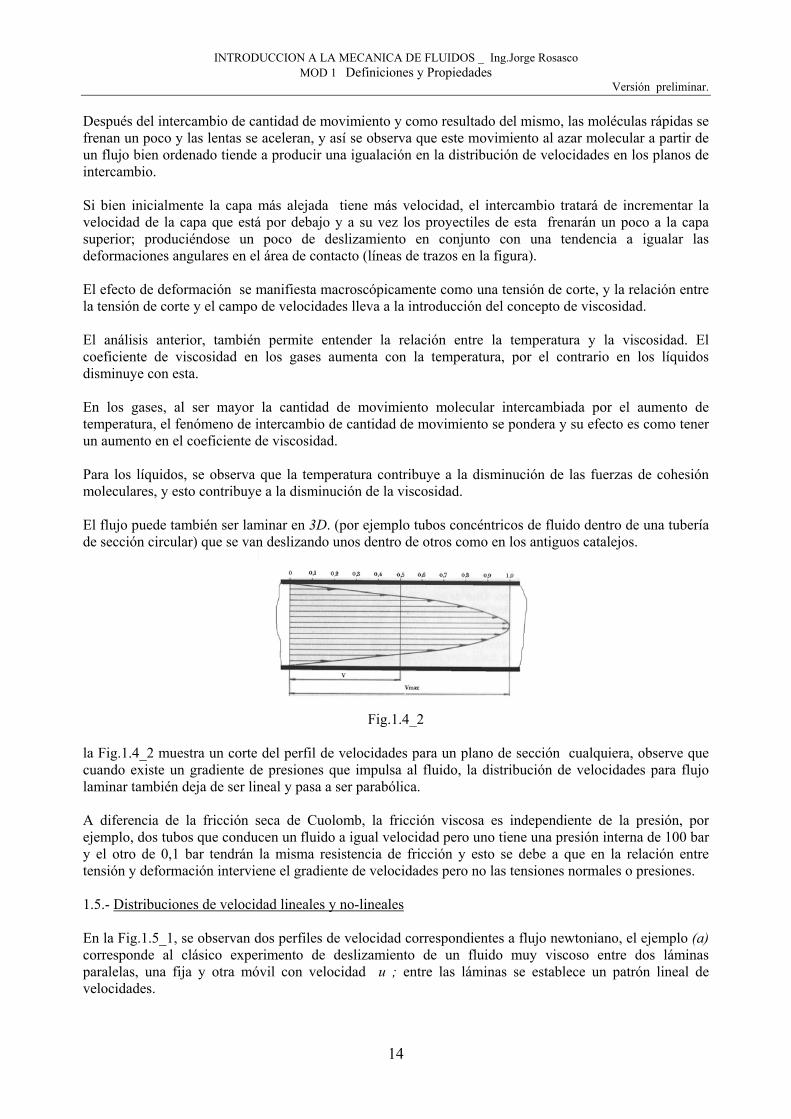
Después del intercambio de cantidad de movimiento y como resultado del mismo, las moléculas rápidas se frenan un poco y las lentas se aceleran, y así se observa que este movimiento al azar molecular a partir de un flujo bien ordenado tiende a producir una igualación en la distribución de velocidades en los planos de intercambio. Si bien inicialmente la capa más alejada tiene más velocidad, el intercambio tratará de incrementar la velocidad de la capa que está por debajo y a su vez los proyectiles de esta frenarán un poco a la capa superior; produciéndose un poco de deslizamiento en conjunto con una tendencia a igualar las deformaciones angulares en el área de contacto (líneas de trazos en la figura). El efecto de deformación se manifiesta macroscópicamente como una tensión de corte, y la relación entre la tensión de corte y el campo de velocidades lleva a la introducción del concepto de viscosidad. El análisis anterior, también permite entender la relación entre la temperatura y la viscosidad. El coeficiente de viscosidad en los gases aumenta con la temperatura, por el contrario en los líquidos disminuye con esta. En los gases, al ser mayor la cantidad de movimiento molecular intercambiada por el aumento de temperatura, el fenómeno de intercambio de cantidad de movimiento se pondera y su efecto es como tener un aumento en el coeficiente de viscosidad. Para los líquidos, se observa que la temperatura contribuye a la disminución de las fuerzas de cohesión moleculares, y esto contribuye a la disminución de la viscosidad. El flujo puede también ser laminar en 3D. (por ejemplo tubos concéntricos de fluido dentro de una tubería de sección circular) que se van deslizando unos dentro de otros como en los antiguos catalejos.
Fig.1.4_2
la Fig.1.4_2 muestra un corte del perfil de velocidades para un plano de sección cualquiera, observe que cuando existe un gradiente de presiones que impulsa al fluido, la distribución de velocidades para flujo laminar también deja de ser lineal y pasa a ser parabólica. A diferencia de la fricción seca de Cuolomb, la fricción viscosa es independiente de la presión, por ejemplo, dos tubos que conducen un fluido a igual velocidad pero uno tiene una presión interna de 100 bar y el otro de 0,1 bar tendrán la misma resistencia de fricción y esto se debe a que en la relación entre tensión y deformación interviene el gradiente de velocidades pero no las tensiones normales o presiones. 1.5.- Distribuciones de velocidad lineales y no-lineales En la Fig.1.5_1, se observan dos perfiles de velocidad correspondientes a flujo newtoniano, el ejemplo (a) corresponde al clásico experimento de deslizamiento de un fluido muy viscoso entre dos láminas paralelas, una fija y otra móvil con velocidad u ; entre las láminas se establece un patrón lineal de velocidades.

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1 Definiciones y Propiedades Versión preliminar.
15
En el ejemplo (b) se ha representado la distribución de velocidades en las proximidades de una superficie plana embestida por una corriente libre de aire, en el limite inferior el flujo tiene velocidad nula debido al principio de no deslizamiento con la superficie y se adhiere a la placa, al no haber una placa superior con velocidad propia, el perfil de velocidades se aproxima asintóticamente a la velocidad de corriente libre lejos del objeto, teóricamente la alcanza en infinito. La distribución de velocidades se establece por un perfil curvo, típicamente una curva de tercer grado según los modelos de teoría de capa límite, aunque el aire es un fluido Newtoniano.
Fig.1.5_1
En este caso la distribución de velocidades no es lineal; sin embargo por tratarse de flujos Newtonianos, existe linealidad entre τ y (dV/dy) de acuerdo a la ecuación [1.2.1] igual que antes y a la representación de τ respecto a (dVx/dy) de la Fig.1.5_1 derecha.3, indica las relaciones de linealidad para ambos fluidos. En el caso (b), existe linealidad de τ y (dVx/dy), pero el gradiente (dVx/dy) no se mantiene constante con la distancia a la placa inferior. El flujo laminar tiende a volverse inestable al disminuir μ o aumentar V. Para la mayoría de los fluidos el coeficiente μ es constante para todo el rango de gradientes, lo que representa como dijimos a los Fluidos Newtonianos. Pero en otro tipo de fluidos, μ puede no mantenerse constante para todo el rango de gradientes, no obstante puede mantenerse la característica de flujo laminar y la distribución de velocidades lineal entre dos superficies sólidas que se mueven en forma paralela. 1.6.- Fluidos No-Newtonianos.
Los fluidos que no cumplen con la ley básica de linealidad ( )dVxdy
τ μ= − , se denominan no-Newtonianos
y son estudiados por una rama de la Mecánica de Fluidos llamada Reología, en estos casos μ no es constante. El comportamiento reológico de los fluidos no-Newtonianos puede establecerse por una fórmula generalizada de la anterior como : 3 En la figura 1.5_2 las dimensiones no se corresponden a la realidad , para (a) la separación típica de las láminas es de 1 a 2 milímetros para (b) el perfil se establece en el orden de 0.1 mm

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1 Definiciones y Propiedades Versión preliminar.
16
( )dVxdy
τ ς= − [1.6.1]
en la que ς (dseda), puede expresarse como una función de (dVx/dy ), o sea ς = ς (dVx/dy ) y entonces τ tendrá una dependencia funcional no lineal con el gradiente. Para los fluidos en las que ς disminuye al aumentar el gradiente de velocidad (dVx/dy) y (τ crece más lentamente), el comportamiento se llama pseudo-plástico, por el contrario si ς aumenta con el aumento del gradiente y (τ crece más rápidamente), se llama comportamiento dilatante, si ς resulta independiente del gradiente, se comporta como Newtoniano y es el caso límite en el que ς = μ . Se han propuesto numerosos modelos representativos para hallar la relación funcional ζ = ζ (dVx/dy) que tienen nombres de sus creadores tales como Modelo Bingham , Modelo Ellis, Modelo Eyring, y Modelo Ostwald de Waale, aquí explicitaremos este último por ser uno de los más simples y efectivos en la modelización de los comportamientos reales de fluidos no-Newtonianos. 1.6.1.-Modelo Ostwald de Waale. La ecuación descriptiva del modelo es:
1. ( )
ndVx dVxmyx dy dyτ
−⎛ ⎞= ⋅⎜ ⎟
⎝ ⎠ [1.6.2]
aquí vemos que el coeficiente ζ de la ecuación 1.6.1, tiene dos parámetros numéricos de ajuste m y n , se conoce también como ley de la potencia, se ve fácilmente que si m = μ , y n = 1 el fluido se reduce a Newtoniano, si n < 1, tiene comportamiento pseudo – plástico y si n > 1 comportamiento dilatante, habitualmente los valores m y n se encuentran tabulados en función de la sustancia estudiada. En la figura siguiente, 1.6_1, se observa el tipo de representaciones del modelo y las características que adoptan las sustancias que se aproximan a ellas.
Fig.1.6_1
INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1 Definiciones y Propiedades Versión preliminar.
17
Si nos paramos en un punto cualquiera del la curva ya sea para un fluido Newtoniano, o un no-Newtoniano tendremos definido un gradiente y por tanto una velocidad de deformación angular
/dV dyxγ•=
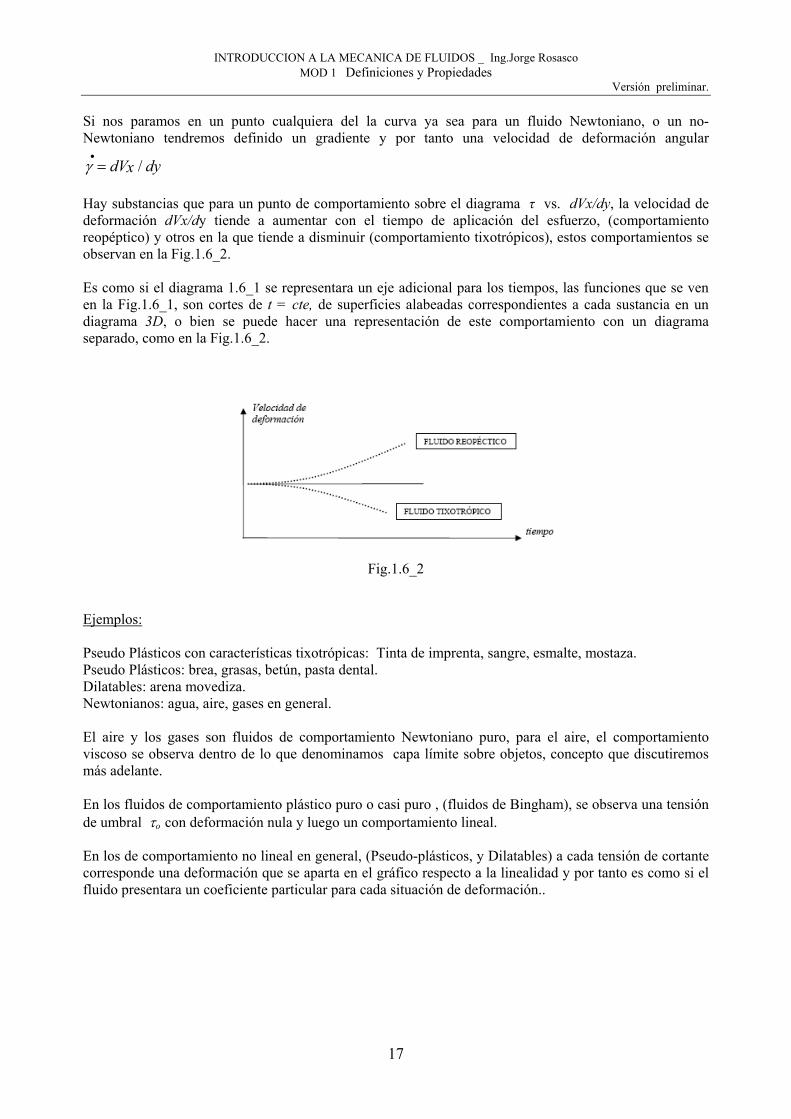
Hay substancias que para un punto de comportamiento sobre el diagrama τ vs. dVx/dy, la velocidad de deformación dVx/dy tiende a aumentar con el tiempo de aplicación del esfuerzo, (comportamiento reopéptico) y otros en la que tiende a disminuir (comportamiento tixotrópicos), estos comportamientos se observan en la Fig.1.6_2. Es como si el diagrama 1.6_1 se representara un eje adicional para los tiempos, las funciones que se ven en la Fig.1.6_1, son cortes de t = cte, de superficies alabeadas correspondientes a cada sustancia en un diagrama 3D, o bien se puede hacer una representación de este comportamiento con un diagrama separado, como en la Fig.1.6_2.
Fig.1.6_2
Ejemplos: Pseudo Plásticos con características tixotrópicas: Tinta de imprenta, sangre, esmalte, mostaza. Pseudo Plásticos: brea, grasas, betún, pasta dental. Dilatables: arena movediza. Newtonianos: agua, aire, gases en general. El aire y los gases son fluidos de comportamiento Newtoniano puro, para el aire, el comportamiento viscoso se observa dentro de lo que denominamos capa límite sobre objetos, concepto que discutiremos más adelante. En los fluidos de comportamiento plástico puro o casi puro , (fluidos de Bingham), se observa una tensión de umbral τo con deformación nula y luego un comportamiento lineal. En los de comportamiento no lineal en general, (Pseudo-plásticos, y Dilatables) a cada tensión de cortante corresponde una deformación que se aparta en el gráfico respecto a la linealidad y por tanto es como si el fluido presentara un coeficiente particular para cada situación de deformación..
INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1 Definiciones y Propiedades Versión preliminar.
18
1.7.- Clasificación de los flujos de fluidos: El flujo se dice: a.- Permanente: cuando no hay cambios en el tiempo para ninguna propiedad del fluido en cada punto no material del campo, (pero la propiedad puede cambiar de un punto a otro), por consiguiente las líneas de corriente, trayectoria y traza, (que definiremos más adelante) serán invariables en el espacio de definición del fluido. La definición matemática del flujo permanente, sería: dN /dt = 0, grad N ≠ 0 donde N es una propiedad genérica, escalar o vectorial del campo. Observamos que la segunda ecuación, nos indica que la variable puede cambiar de un punto a otro del campo. b.- Permanente uniforme: si además de ser permanente, las propiedades tienen igual valor para todos los puntos del campo el campo, y se mantienen en este valor, el campo es permanente y uniforme, en este caso se cumple que:
/dN dt = 0 grad N =0 c- No permanente: Lo opuesto al caso a. d.- Movimiento o Flujo Laminar Como ya se dijo en el punto [1.2], el comportamiento de un fluido es laminar, cuando las partículas se mueven a lo largo de trayectorias formando capas o láminas, y para flujo 2D, el perfil del campo de velocidades es una función en (x,y). En este caso todos los cortes según z darán el mismo perfil de velocidades, y los planos (x,z ) serán las capas o láminas que tendrán distintas velocidades entre si. El flujo puede también ser laminar en 3D., por ejemplo formando tubos concéntricos coaxiales. Para flujos Newtonianos, el flujo laminar tiende a volverse inestable al disminuir μ o aumentar V, y por supuesto al aumentar el espesor de la capa de fluido en el experimento de Newton. La relación entre tensiones y gradiente de velocidad puede no ser lineal, es el caso de los no-newtonianos, pero igual, puede darse flujo laminar, la distribución de velocidades es asimismo lineal entre las dos superficies sólidas del experimento de Newton, pero las características de la tensión no serán proporcionales con el patrón de deformación. e- Movimiento o Flujo Turbulento: Es el más frecuente en las aplicaciones prácticas de la ingeniería. El movimiento de las partículas es irregular normalmente agrupadas en trombas o macro partículas, y hay profuso intercambio de cantidad de movimiento entre las diversas partes del flujo, que se realiza a través de estas macro-regiones, similar al intercambio de cantidad de movimiento molecular pero en la escala mucho mayor debido a estas macro partículas. Las macro partículas pueden tener un tamaño pequeño o muy grande dependiendo del fenómeno. El flujo turbulento origina tensiones de corte superiores al laminar. Las pérdidas globales de energía están con la potencia ^ 2 de la velocidad, mientras que con la potencia ^ 1 en laminar, la tensión de corte en módulo puede en este caso manejarse con la fórmula:

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1 Definiciones y Propiedades Versión preliminar.
19
)(dydV
⋅−= ητ [1.7.1]
donde η es denominada viscosidad de remolino, la que depende del fluido y además de la densidad y tipo de movimiento, lo analizaremos más adelante con más detalle. Como ya se dijo antes, las condiciones de flujo laminar y turbulento están asociadas a rotacionalidad y vorticidad conceptos que también definiremos más adelante. f. -Flujo Ideal o Perfecto: Es aquel en que la viscosidad se considera nula la viscosidad, μ.= 0 y que la densidad ρ = cte. La condición de flujo ideal puede asumirse con bastante exactitud para flujos abiertos fuera de la capa límite que rodea los objetos, el flujo y las partículas se mueven sobre un esquema de traslación pura sin rotacionalidad aunque pueden seguir trayectorias curvas. g. - Flujo Adiabático e Isentrópico: Atendiendo a las condiciones que se verifiquen dentro del volumen de control, (una región fija y arbitraria contenida dentro del campo de flujo), si no hay intercambio de calor y trabajo con la región exterior al volumen de control, entonces el fluido se denomina adiabático. Además, si es ideal y el proceso no tiene irreversibilidades en el sentido termodinámico se denomina isentrópico. Si la transformación es adiabática y corresponde a un gas perfecto, se cumple que:
o sea: p V con 1 1 221 -1 -1. o sea T V T V1 1 2 2
cppV cte p V cvT V cte
γγ γ γγ γ γ
= = =
− = =
El calor específico, que aparece en las formulas, es la cantidad de calor necesaria para elevar un grado centígrado la temperatura de la unidad de masa, pero para un gas esta cantidad de calor es diferente si se hace el calentamiento a presión constante en cuyo caso se obtiene Cp o a volumen constante Cv, ; siendo mayor a presión constante ya que el gas debe expandirse además de aumentar su temperatura. h.- Turbulento - permanente: Si ocurre que en cada punto del campo de definición del flujo, se admite una fluctuación de la propiedad genérica N tal que el promedio temporal de la propiedad es constante., el flujo puede ser turbulento pero considerase permanente, o sea el muestreo sobre un punto no material fijo del campo de flujo
0
1 t
Nn n dt ctet
= ⋅ =∫
el flujo es turbulento y se considera permanente. i.- Compresible - Incompresible: Si ρ ≠ cte. de un punto a otro en el campo del flujo, el fluido se considera compresible, en general los gases se consideran compresibles salvo en movimientos a velocidades bajas, y los líquidos no, salvo en este último caso para el estudio de fenómenos que involucren la propagación del sonido, como fenómeno de golpe de ariete. El volumen en los líquidos varía con la temperatura con un coeficiente de dilatación volumétrico ΔV/V = k.ΔT. y con la presión a través de coeficientes de comprensibilidad para líquidos Δv/v = k .ΔP.

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1 Definiciones y Propiedades Versión preliminar.
20
j.- Subsónico - Supersónico: Para los gases, existe una gran diferencia de comportamiento definida según el rango de velocidad a la que se mueven definido por sus velocidades como subsónico o supersónico. La velocidad del sonido en el aire a nivel del mar es de 330 m/seg, unos 1200 km/h. El número de Mach es una medida relativa del valor de esta frontera, y para 330 m/seg, M = 1. por encima de este valor, un flujo subsónico se convierte en supersónico. En general los gases pueden considerarse incompresibles para velocidades hasta M ≤ 0.3 mas allá de lo cual su comportamiento es de flujo compresible. El número de Mach, en rigor, se define como: M = V(TAS) / c a su vez 0c c θ= con θ = T/T0 , c y T son los valores en un determinado punto del campo y co y To, los correspondientes a nivel del mar en atmósfera tipo. Vemos de aquí que el valor del número de Mach varía con la temperatura, y por lo tanto con la altura. Velocidad (TAS) significa (True Airspeed) o velocidad verdadera, en la lectura de la velocidad a una cierta altura se cometen errores debido a que la densidad disminuye con la misma y los instrumentos están calibrados para un patrón estándar de variación de la densidad con la altura, que puede ser diferente a lo real, por lo cual la velocidad leída debe corregirse, dando lugar a la velocidad verdadera. k.- Atendiendo a la clasificación por tipo de flujos desarrollados, pueden ser:
k1.- Flujos externos: los que se producen en torno a objetos libres como perfiles, formas geométricas, árboles, puentes, barcos, etc. k2.- Flujos internos: son los que están desarrollados dentro de tuberías, canales, boquillas, chimeneas, turbo maquinaria, vertederos, etc. Los analizaremos luego en detalle. 1.8.- Acerca de la ecuación de estado Se considera al igual que al definir la ley de Newton de la viscosidad, un principio secundario o constitutivo, que se agrega al conjunto de ecuaciones generales para la resolución de problemas referidos a las trayectorias de las partículas, y las distribuciones de presión en torno a objetos, no están dentro de las leyes generales, por ejemplo si el continuo fuera diferente, como ser un sólido elástico, el principio constitutivo seria la ley de Hooke de la elasticidad y no la ley de Newton de la viscosidad. Tratándose de gases, como el aire y otros gases reales, en primera aproximación puede usarse la ley constitutiva de los gases perfectos. Cuando una masa gaseosa que ocupa un volumen V ejerciendo una presión absoluta p sobre las paredes que lo contienen, y a una temperatura absoluta T, la ecuación establece que:
. .pV n RT
=
siendo n el número de moles de la masa gaseosa y R una constante universal R = 8.31 x 10 7 ergio/mol.°K, como n se puede expresar como n = m / M, o sea masa total sobre masa de cada mol, la ecuación anterior queda:
⎟⎠⎞
⎜⎝⎛=→=
MR
TpR
Mm
TVp
ρ .

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1 Definiciones y Propiedades Versión preliminar.
21
R/M = R’ se la denomina constante particular, que para el caso del aire vale: R’ = 2.87 10 6 ergio/gramo °K. En general tomando como referencia el nivel del mar para la masa de aire, podremos escribir:
pcte R´po
p p ToT T To o o o
ρρ ρ ρ
= = = → =
esto nos permite calcular las condiciones en altura, conociendo los valores a nivel del mar,
KgergRKoT
cmgro
cmgrfop
ª/61087.2´'28815273
3/001225.02/2.1013
=°=+=
==
ρ
Para los líquidos no hay un vinculo matemático entre presión densidad y temperatura, como en el caso de los gases y consideramos en primera aproximación, ρ = Cte, Cp = Cv = C , y como vínculo entre calor agregado o quitado y temperatura, la formulación básica de la calorimetría: Q = C.Msis .ΔT Donde Msis, es la masa del sistema. Notas Complementarias. 1.9.-Como se comporta una sustancia fluida. Suponga que en un experimento clásico para someter un material a cizalladura o cortante, se coloca una sustancia desconocida entre dos láminas sólidas, cuando a la placa superior se le aplica una fuerza F cualquiera y la inferior permanece fija, pueden suceder tres cosas: 1.- Que se establezca en la placa superior un movimiento uniformemente acelerado, en este caso hay vacío entre ambas láminas. 2.- Que se establezca un movimiento uniformemente retardado, en este caso, después de un tiempo la lámina se detendrá pero la fuerza seguirá presente. En este caso hay una sustancia sólida entre las láminas y unida a ellas. 3.- Que se establezca un movimiento uniforme (de velocidad constante no nula) y en este caso se establece que la sustancia ubicada entre las láminas es un fluido. Es un hecho experimental comprobado, con láminas sólidas de diversos materiales y fluidos diferentes que la sustancia se adhiere a ambas láminas presentando velocidad nula en la inferior y la velocidad correspondiente al desplazamiento de la lámina en la superior (es decir también está adherido a ella) , así como en general, un patrón de distribución de velocidades lineal entre ambas. El parámetro principal que define este comportamiento es la viscosidad.

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1 Definiciones y Propiedades Versión preliminar.
22
1.10.- Características generales de un fluido. Los fluidos responden mejor al tratamiento matemático como cuerpos flexibles puros, es decir manifestar poca capacidad para resistir esfuerzos de corte, y se clasifican generalmente en líquidos y gases lo que incluye vapores. Los líquidos, presentan fuerzas intermoleculares que permiten definir volumen pero no forma, son poco compresibles y la Densidad varía poco con la Presión y Temperatura Los gases, tienen un comportamiento diferente, p, v y T se relacionan a través de las ecuaciones de Estado termodinámico. 1.11.- Velocidad y Trayectoria de una partícula . Podemos definir la velocidad para una región del campo fluido dada y en un instante dado, como el cociente del impulso total en la región diferencial dividido por la masa de la región diferencial o sea:
/ /d I dm dmV dm V→ → →
= = Debido a que las moléculas individuales se mueven en todas direcciones, cada una tiene un impulso diferente, por eso definimos la velocidad del fluido en un punto como el promedio del cociente del impulso de las moléculas sobre la masa para cada una en una pequeña región o mesovolumen con centro en ese punto, siendo el impulso y la velocidad magnitudes vectoriales. El mesovolumen está en línea con la definición de partícula en un medio continuo, tenemos entonces definida la velocidad de la partícula fluida en un punto del campo. Las fuerzas que pueden actuar sobre la partícula fluida son de dos tipos: 1.- Fuerzas másicas actúan a distancia por campos (gravitatorias , eléctricas y magnéticas). 2..- Fuerzas superficiales. actúan por contacto y son de dos tipos, (normales a las superficies, o fuerzas de presión ) y tangenciales a la superficie o fuerzas de corte (provienen de fuerzas de fricción viscosa). En nuestro estudiio, podremos prescindir en general de las fuerzas eléctricas y electromagnéticas. Una cosa que podemos hacer para el análisis, es estudiar la partícula siguiéndola desde una terna inercial genérica para lo cual las fuerzas actuantes son las citadas en el párrafo anterior, pero también podemos situar una terna no inercial en el centro de masa de la partícula. Si nos movemos con la partícula entonces en cada instante se puede considerar la partícula quieta respecto de la terna, a esto se lo llama equilibrio dinámico. En este caso las fuerzas a considerar son: fuerzas activas de presión y viscosas, fuerza másica, y una pseudo fuerza inercial. El equilibrio dinámico o cuasi equilibrio, se define de acuerdo a la aplicación del Corolario de D’Alambert
que no es más que la transposición del segundo principio de la dinámica: 0F m a→ →
− = , el producto m a→
se considera aquí una nueva fuerza, llamada fuerza inercial, formando equilibrio instantáneo con las otras (y es la resistencia de la partícula a ser acelerada), la aceleración sobre esta terna es observada hacia el exterior de la trayectoria o sea como centrifuga. Para esta terna no inercial fijada en la partícula, la velocidad de la misma es nula ya que estamos solidarios a ella, pero sentimos el efecto de la seudo aceleración centrífuga.

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1 Definiciones y Propiedades Versión preliminar.
23
Fig. 1.11_1
Si, estudiamos el campo de partículas desde una terna inercial, la aceleración instantánea sobre cada partícula, determina la ubicación de la misma en el siguiente instante y finalmente la trayectoria de la misma en un intervalo. La dirección instantánea del movimiento, no necesariamente debe coincidir con el vector de aceleración ni con la dirección de los vectores componentes. El vector aceleración para una trayectoria en el espacio posee dos componentes de aceleración una tangencial a la curva y otra normal a ella sobre el plano de curvatura de la trayectoria. La resultante de las fuerzas superficiales de presión y viscosas en las caras, se puede aplicar en el baricentro de la partícula si adicionamos un momento de rotación, (siempre que el volumen de la partícula no sea diferencial). Hablando en la forma más general, la partícula se considera en equilibrio dinámico instantáneo de acuerdo con el corolario D’Alembert dado por:
0Fi m a→
− =∑
0Mi Jα→
− =∑
Donde a→
es la aceleración neta de la partícula y α→
su aceleración angular, m su masa y J su momento de
inercia, y la condición básica en cada punto del campo es que 0F F Fp v i→ → →
+ + = en cada instante, como
se observa en la figura 1.11_1. Si tuviéramos un fluido de viscosidad muy pequeña, 0Fv→
≅ (fuerzas
debidas a la viscosidad muy pequeñas) quedará 0F Fp i→ →
+ =
Paralelamente, si las fuerzas de inercia pueden despreciarse, (flujo altamente viscoso) 0F Fp v→ →
+ = en este caso no habrá aceleración neta para la partícula viéndola desde la terna inercial, y la partícula se desplazará a velocidad constante sobre una trayectoria rectilínea. Los comportamientos fluidos como veremos más adelante pueden clasificarse en relación a la importancia
relativa entre el cociente de los módulos de los vectores /Fi Fv→ →
.

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1 Definiciones y Propiedades Versión preliminar.
24
1.12.- Física de las superficies de interfase para líquidos - Tensión Superficial. La explicación física de los fenómenos que involucran las superficies de interfase requieren de un abordaje desde la teoría cinética molecular. Por ejemplo, las moléculas que están sobre la superficie pueden excursionar hacia el exterior con mayor facilidad debido a que no existen fuerzas repulsivas de otras similares como si ocurre hacia el interior y las fuerzas de adherencia con sus vecinas solamente proviene de las moléculas que están por debajo. . Si estas moléculas superficiales poseen suficiente energía, pueden escapar de la masa líquida , en un proceso que se denomina de evaporación. si la energía no es la suficiente las excursiones son mas cortas donde se producen brincos de las moléculas y que son devueltas a la superficie líquida, esta pequeña capa sobre la interfase posee comportamientos y fuerzas diferentes a las interiores del seno del líquido, y estos efectos son los causantes de los fenómenos asociados a la tensión superficial. Para fijar ideas se considera el experimento simple de la Fig. 1.12_1, un tubo de diámetro pequeño, del orden de 1 mm, se apoya enrasado a la superficie líquida de mayores dimensiones, ingresando una presión p mayor que la presión po de la superficie exterior por el tubo lateral; si este proceso es lento, una
pequeña burbuja se va creando en la parte inferior, y la superficie circular original se va transformando en una media esfera.
Fig. 1.12_1
Resulta evidente que un trabajo mecánico se ha realizado sobre la superficie, y que el área de la interfase ha aumentado, también que si a partir de este estado final se disminuye la presión p , hasta po la superficie se restituye al valor del circulo original, es decir, el trabajo es devuelto por el fluido, lo que sugiere que la superficie es capaz de almacenar energía potencial. Los experimentos indican que el trabajo que se efectúa para incrementar la superficie, es proporcional al área incrementada y esto ocurre hasta el colapso de la burbuja que se produce poco después de alcanzar la forma semi-esférica. es decir: dW dAsσ= [1.12.1] la constante de proporcionalidad sσ se denomina coeficiente de tensión superficial y puede ser definida a partir de la ecuación anterior como el trabajo efectuado a la energía almacenada por unidad de área. las unidades son las correspondientes a un trabajo por unidad de área:

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1 Definiciones y Propiedades Versión preliminar.
25
[ ] [ ] [ ]22
[ ] [ ] [ ]2 2
Newm joule Newm m m
dyn cm erg dyncm cm cm
= =
= =
el segundo grupo de unidades son las utilizadas normalmente, ya que el primer grupo da valores muy pequeños. Un concepto interesante es, volviendo al experimento de la Fig. 1.12_1 , es notar que al aumento de la superficie no debe ser interpretado en el sentido de una dilatación como ocurre cuando se infla un globo, sino que la mayor separación que se opera entre las moléculas de la superficie original son cubiertas por moléculas nuevas de la interfase líquida de manera que la separación intermolecular de la nueva superficie es igual a la superficie original y permanece constante al aumentar el área. Aplicando la ecuación [1.12.1] al experimento de la figura, obtendremos un resultado interesante, una vez insuflada la semiesfera, su área será:
224 / 2 2A R Rπ π= = cuando el área de la burbuja experimente un incremento adicional dR en su radio, el incremento en el área será:
4 4dA R dA RdRdR
π π= → =
y el trabajo necesario para crear este incremento de superficie es, aplicando [1.12.1]:
4dW RdRsπ σ= [1.12.2] si consideramos que el radio de la burbuja es muy pequeño, y por tanto la presión en la superficie que da hacia el seno del líquido la consideramos de valor po , despreciando la pequeña variación en la presión hidrostática debida a la profundidad, y por otra parte p es la presión en la superficie interior, tendremos un valor neto de fuerza desde adentro hacia afuera para cada porción de área, dado por: ( )p p dAo− , y el trabajo efectuado sobre esta porción de área dA al expandir la burbuja un radio dR será: ( )p p dAdRo− integrando esta expresión sobre toda la superficie, será:
2( ) 2dW p p R dRo π= − igualando con el resultado [1.12.2] queda:
2( ) 2 42( )
2
dW p p R dR RdRo ssp po R
sp po R
π π σσ
σ
= − = →
− = →
= +

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1 Definiciones y Propiedades Versión preliminar.
26
es el valor de presión externa a insuflar para obtener el crecimiento de la interfase circular plana a una burbuja semiesférica Cabe consignar que este valor obtenido para la presión obtenido para insuflar una esfera es un caso particular en el cual cualquier pequeña porción dA plana de una superficie original puede adaptare a otra que en general tendrá dos radios de curvatura R1 y R2. definidos en dos direcciones ortogonales., la expresión general de la diferencia de presiones es:
1 1[ ]1 2
p po s R Rσ= + + [1.12.3]
en el caso de la burbuja esférica, R1= R2, y la anterior queda
2 sp po Rσ
= + (expansión esférica) [1.12.4]
que es el valor obtenido anteriormente, si en la figura 1.12_1 las paredes verticales fuesen planas, el insuflado de aire generaría una superficie cilíndrica en la cual uno de los radios de curvatura sería infinito, y el otro tendría un valor R , entonces la expresión [1.12.3] quedaría:
sp po Rσ
= + (expansión cilíndrica)
1.12.1.- Angulo de contacto. Vamos a considerar ahora una molécula de líquido próxima a la superficie de interfase con la superficie expuesta al aire y por otra parte próxima también a la pared sólida del recipiente que contiene al líquido, esta situación se observa en la Fig.1.12_2 a , sobre esta molécula se pone de manifiesto dos fuerzas:
la fuerza de cohesión que ejercen otras moléculas próximas en la fase líquida fc→
.
la fuerza de adherencia ejercidas por las moléculas de la pared fa→
.
Estas fuerzas están representadas en la Fig.1.12_2a , en las figuras b y c, la fuerza f→
representa la resultante de estas acciones sobre la molécula que está muy próxima a la superficie; se dan las dos posibilidades para la dirección de la resultante, que esté dirigida hacia el exterior del recipiente o hacia el interior. En el Mod. 2 demostraremos que las superficies de interfase estables son aquellas donde la resultante de las fuerzas aplicadas sobre las partículas son normales a la misma, por lo cual podemos tener superficies de contacto sobreelevadas y deprimidas. Queda entonces para los casos b y c definido lo que se denomina ángulo de contacto θ, que se define entre la superficie libre en la zona de contacto y la pared vertical. Si las fuerzas de adherencia son mayores que las de cohesión, el ángulo de contacto es inferior a 90º dando lugar a una superficie de contacto sobreelevada y si ocurre lo opuesto es mayor a 90º dando lugar a una superficie de contacto deprimida.

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1 Definiciones y Propiedades Versión preliminar.
27
Por ejemplo entre agua destilada y vidrio θ es prácticamente nulo y entre mercurio y vidrio es de unos 140º., en el caso de ángulos ente 0 y 90º se dice que el líquido moja la superficie y si es mayor a 90º que no moja a la superficie. Pero en general los valores del ángulo de contacto son variables con la concentración de las soluciones si existen y presencia de impurezas en el fluido y en la superficie sólida.
Fig. 1.12-2 1.12.2.- Capilaridad. Un fenómeno muy conocido que se denomina capilaridad, es debido al efecto de las tensiones superficiales y consiste en el ascenso de líquido por un tubo abierto de pequeño diámetro. Para explicar el fenómeno nos valemos de la Fig. 1.12_3 siguiente, tomando en cuenta que el diámetro del tubo está muy magnificado con propósitos didácticos, y debe ser del orden de 1mm interior.

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1 Definiciones y Propiedades Versión preliminar.
28
Fig.1.12_3
Supongamos primero que el nivel del líquido en el tubo no asciende, como está indicado en la figura anterior izquierda; las fuerzas de cohesión y adherencia son tales que se establecen pequeños resaltos o meniscos de valor θ <90º ; siendo la presión exterior la presión atmosférica po , pero como el tubo capilar tiene un diámetro muy pequeño, podemos suponer que dentro del capilar se ha establecido una superficie hemisférica esto significa que la presión por debajo de la superficie líquida dentro del capilar es algo menor de acuerdo al resultado [1.12.4] ; observando la figura a, podemos observar que por tanto, la presión un poco por debajo de la superficie fuera del capilar tendrá comparativamente presiones mayores que dentro del capilar al mismo nivel por debajo de la superficie por lo cual la presión exterior al capilar po , hace ascender la columna hasta restablecer el equilibrio.
El punto P en el gráfico b de la derecha, debe tener la presión exterior po , y esto se ha logrado por elevación de la columna hidrostática dentro del capilar. Un análisis detallado de la geometría del hemisferio, por otra parte nos define que:
cos / cosr R R rθ θ= → = donde r es el radio del capilar y R el radio del hemisferio. si llamamos po’ la presión inmediatamente debajo del hemisferio, tendremos aplicando el resultado [1.12.4], a este caso:
2' sp po o Rσ
= −
y reemplazando el valor de R obtenido más arriba, queda:
2 cos' sp po o rσ θ
= −
y la presión en el punto P, será:
2 cos´ [ ]sp p gh p gho o o rσ θρ ρ= + = − +

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1 Definiciones y Propiedades Versión preliminar.
29
entonces operando nos queda:
2 cos 2 cos[ ] [ ]s sgh hr g r
σ θ σ θρρ
= → = [1.12.5]
que es la altura que alcanzará la columna dentro del capilar en función de la tensión superficial de la sustancia, el ángulo de contacto y el radio interior. Con un criterio similar se puede obtener la altura que se deprime dentro de un capilar un hemisferio convexo que se produce con las sustancias que no mojan la superficie, por ejemplo mercurio con capilar de vidrio, como se indica en la Fig. 1.12_4:
Fig. 1.12-4 en este caso se obtiene:
2 cos[ ]shg r
σ θρ
= −
1.12.4.- Análisis de la tensión superficial por un método mecánico. Un experimento ideal diseñado según se observa en la Fig. 1.12_5, permite un análisis mecanicista de la tensión superficial. El dispositivo consiste en un marco de alambre que tiene un alambre transversal secundario que trabaja como una corredera sin rozamiento sobre el primero.
Fig.1.12_5
Cuando se sumerge el marco en una solución acuosa de detergente y un poco de glicerina, se forma una película que en el dibujo esta representada por el rayado horizontal.

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1 Definiciones y Propiedades Versión preliminar.
30
Como la superficie tiende siempre a ser mínima comenzará a contraer al marco móvil, y lo moverá inicialmente un dx, entonces será necesario aplicar una fuerza F para reestablecer el equilibrio, por lo que debe desplazarse una distancia dx hacia abajo para restablecer la posición inicial, cuando esto ocurre el área se estira una cantidad dA = 2 L dx el 2 aparece porque en realidad se establecen dos películas enrolladas en el marco rodeando al alambre y la superficie debe considerarse doble. Como el coeficiente de tensión superficial está definido como un trabajo por unidad de área:
dWs dA
σ =
de aquí se deduce que
[2 ] 2dW dA Ldx Ldxs s sσ σ σ= = = también podemos definir el diferencial de trabajo en la dirección vertical como: dW F dx= y comparando e igualando ambos resultados:
2F Lsσ= la interpretación de este resultado es que cada una de las dos películas enrolladas en torno al tramo móvil del marco, está tirando con una fuerza Lsσ , siendo: /F Lsσ = o sea una fuerza por unidad de longitud. Esto que ya lo habíamos visto a través de la definición de las unidades básicas del coeficiente, al ver que 1[N m / m2] = 1[N / m] pero vemos que tiene un fundamento físico como acabamos de demostrar.
Fig.1.12_6 En la Fig.1.12_6, puede verse que al ascenso de la columna por el capilar se la puede interpretar como que una fuerza aplicada sobre el perímetro del contacto de fluido con el tubo, está tirando hacia arriba.

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1 Definiciones y Propiedades Versión preliminar.
31
La superficie del líquido tiene contacto con la pared del tubo sobre una longitud 2 π r , la fuerza de tensión superficial forma en cada punto del perímetro un ángulo θ con la vertical, por lo que la fuerza total vertical pude ser evaluada como:
2 cosF r sπ σ θ= la fuerza pega el tirón para arriba y la columna asciende hasta una altura h , en la cual se iguala la fuerza hacia arriba con el peso de la columna:
22 cosr r ghsπ σ θ π ρ= de la cual operando obtenemos:
2 cos[ ]shg r
σ θρ
=
que es el mismo valor obtenido en la ecuación [1.12.5]. El coeficiente de tensión superficial de un líquido puede medirse aplicando este concepto mecanicista, midiendo con precisión la fuerza necesaria para despegar un objeto de una superficie líquida. hay una aparato denominado D´ Nouy, por el nombre se su inventor que básicamente consiste en un anillo de alambre de platino muy delgado que es apoyado en la superficie líquida y que luego se mida la fuerza necesaria para despegarlo. La fuerza para despegarlo puede ser evaluada por:
4F r sπ σ= donde se ha considerado la línea de longitud doble ya que al contorno se adhieren dos películas, una en cada cuadrante de la sección circular del alambre, inmediatamente medida la fuerza se obtiene:
4F
s rσ
π=
se debe establecer un anillo patrón ya que pequeñas diferencias aparecen si se usan anillos diferentes, y el ensayo debe estar normalizado. 1.12.5.- Presión interior en las burbujas. Cuando se soplan burbujas de solución jabonosa o detergente, ellas se forman siempre adoptando formas esféricas perfectas ya que la naturaleza es conservadora y usa la menor superficie posible para un dado volumen, esta condición de mínimo lo cumple la esfera y las vemos de diferentes tamaños. En un fluido cada molécula interacciona con las que le rodean. El radio de acción de las fuerzas moleculares es relativamente pequeño, y abarca a las moléculas vecinas más cercanas.

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1 Definiciones y Propiedades Versión preliminar.
32
Cuando consideramos una molécula en el interior del líquido, la resultante de todas las interacciones con sus vecinas será nula. Sin embargo, si la molécula se encuentra en la superficie o próxima a ella, por existir en valor medio menos moléculas arriba que abajo, la resultante de las fuerzas estará dirigida hacia el interior del líquido. En ausencia de bordes sólidos, esta tendencia tiende a formar una superficie esférica.
La tensión superficial es un fenómeno de superficie y es la tendencia de un líquido a disminuir su superficie hasta que su energía de superficie potencial resulte mínima, condición necesaria para que el equilibrio sea estable.
Como la esfera presenta un área mínima para un volumen dado, entonces por la acción de la tensión superficial, una porción de líquido sin contención tiende a formar una esfera u en presencia de superficies sólidas a que se produzca una superficie curva o menisco.
Ante la pregunta: para aumentar el tamaño de la burbuja es necesario incrementar la presión interior ?, probaremos ahora que se verifica exactamente lo contrario. En la Fig.1.12_7, de ha representado esquemáticamente la sección transversal de una burbuja, con su pequeño espesor de pared muy magnificado.
Fig. 1.12_7 por ser tan delgada la película, podemos suponer en primera aproximación que el radio interior y exterior son iguales de valor R. , también llamaremos po la presión atmosférica exterior y pi a la presión interior de la película; respecto de la presión interior de la película, la presión interior p estará en exceso de acuerdo con [1.12.4] en:
2 sp pi Rσ
= +
a su vez, la presión dentro de la película pi , respecto de la presión atmosférica exterior, se encuentra del lado cóncavo de la superficie exterior, habiendo líquido en la capa por debajo de la superficie exterior, por lo cual en este caso la presión en el líquido esta en exceso respecto a la exterior::
2 sp poi Rσ
= +

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1 Definiciones y Propiedades Versión preliminar.
33
remplazando en el primer resultado:
4 sp po Rσ
= +
y vemos que la presión en el interior de la burbuja, para una presión exterior dada, es inversamente proporcional al radio, disminuyendo a medida que aumenta el radio de esta, por supuesto va a ser necesario incorporar más aire al interior, pero a diferencia de lo que ocurre en un globo que se infla, el aire en el caso de la burbuja deberá tener menor presión. []

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1 Definiciones y Propiedades Versión preliminar.
34
1.13..- De lo más grande a los más pequeño. La Tabla 1.13 siguiente, permite al alumno, tener una referencia más clara y directa de los tamaños relativos de las diversas estructuras definidas por la física en sus numerosas vertientes y ramas de las cuales la Mecánica de Fluidos es una de ellas.
Tabla 1.13 De lo más grande a los más pequeño
Radio del objeto en (metros)
Objetos característicos
10 26 Universo observable. 10 24 Supercúmulos de Galaxias 10 23 Cúmulos de Galaxias 10 22 Grupo Local de galaxias. 10 21 Galaxia Vía Láctea (en la cual el sistema solar ocupa un suburbio apartado). 10 12 Sistema Solar 10 11 Atmósferas externas de estrellas gigantes rojas. 10 9 El Sol. 10 8 Planetas gigantes por ejemplo Júpiter. 10 7 Planetas similares a La Tierra. 10 5 Asteroides, Núcleos de cometas 10 4 Ciudades típicas por ejemplo Buenos Aires. 10 0 Seres vivientes en la Tierra
10 -2 Moléculas de ADN de eje largo 10 -5 Células vivas 10 –6 = 1 micrón 10 –9 = 1 nanómetro Moléculas de ADN de eje corto. 10 –10 = 1 Ángstrom Átomos medidos sobre la capa electrónica exterior. 10 -14 Núcleos de átomos pesados 10 -15 Protones, Neutrones 10 -18 Quarks (subcomponentes de los protones y neutrones) 10 -35 Longitud de Plank (radio de las partículas sin dimensiones en
la teoría de cuerdas incluyendo electrones)

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1B Estática Versión preliminar.
1
1B.- ESTÁTICA DE LOS FLUIDOS. Para la Mecánica, los estados de agregación de la materia en la naturaleza son solamente dos, sólidos y fluidos, entre los cuales la diferencia básica es que las moléculas en los sólidos conforman redes de diversos tipos, mientras que en los fluidos las moléculas se mantienen dispersas y en movimiento autónomo. Intuitivamente sabemos que los sólidos pueden soportar cargas o esfuerzos de tracción y corte hasta un cierto límite sin romperse, mientras que si intentamos hacer esto en un fluido en estado líquido o gaseoso, el mismo se desbarataría completamente. [Mod. 1, párrafo 1.2]. Pensemos en una caja desplegable que contenga una sustancia sólida por ejemplo un bloque de madera, y la misma caja que contenga bolitas, ahora imaginemos que desplegamos totalmente la caja sobre una superficie plana, el bloque de madera permanecerá intacto porque es capaz de resistir esfuerzos de tracción y corte producidos por el peso relativo de sus partes, mientras que el conjunto de bolitas se desbarataría, ya que la unión de sus partículas se mantenían unidas por esfuerzos de compresión resistidas en última instancia por las paredes de la caja, que al cesar dan paso a esfuerzos de tracción y corte que el conjunto no puede resistir. Este comportamiento es equivalente para las partículas de fluido que no pueden resistir esfuerzos de cortante si no se mueven. ni esfuerzos de tracción. Por otra parte en el módulo anterior habíamos adoptado la hipótesis del continuo, esto implicaba dejar de tomar en cuenta los comportamientos aislados de las moléculas y suponer a los fluidos como sustancias isótropas formadas por partículas adyacentes [sin huecos] y en contacto permanente entre ellas. La manera en las que las fuerzas se tramiten entre las partículas será entonces independiente de si la sustancia en un sólido o un fluido, y la diferencia estará radicada en la manera diferente en que ambos son capaces de resistir los esfuerzos y en como manifiestan la deformación frente a los mismos. 1.1 Fuerzas de contacto entre partículas fluidas. En la Fig. 1.1_1 se ha representado dos partículas del continuo fluido, A y B ambas están en contacto a través de una superficie ∆A y sobre ellas actuaran cuando estén en movimiento relativo dos fuerzas, una
de contacto activa y reactiva →ΔF y un par
→ΔT .
Cuando ∆A → 0 o sea para un contacto puntual, el par desaparece, y solamente queda la fuerza
→ →=Δ FdF ,
Fig.1.1_1

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1B Estática Versión preliminar.
2
Ahora descompondremos →Fd en una fuerza normal [ d Fn
→
] y una tangencial [ d Fs→
] que dan lugar a las llamadas tensiones superficiales en el punto de contacto:
[ ]lim 0Fn
nn A Aσ
→→ Δ
= Δ → Δ tensión normal,
[ ]lim 0Fs
ss A Aτ
→→ Δ
= Δ → Δ tensión tangencial
En la figura, las partículas A y B se están empujando las fuerzas representadas son las reactivas. Las partículas A y B no deben confundirse con moléculas que chocan, ya que hemos adoptado la hipótesis del continuo , más bien el modelo es el de pequeños volúmenes que se estarán moviendo en contacto al menos por un tiempo corto y en forma independiente, rozando y empujando; se producirán entre ellas fuerzas de compresión y cortante, la compresión producirá si el fluido es compresible variaciones volumétricas de forma y las de cortante, distorsión, ya que las partículas fluidas solamente pueden procesar las tensiones presentes con deformación y distorsión. Además debido a la hipótesis del continuo la partícula A deberá estar en contacto con todas sus vecinas ya que no hay huecos, y entonces tendremos tensiones en todos los puntos de la superficie exterior de A, de los cuales solamente hemos representado una correspondiente a la vecina B. Ya que la esfera presenta infinitas caras de contacto, para simplificar el análisis del volumen de la partícula cuando ∆v→ 0, lo que se hace es trabajar con partículas prismáticas de longitudes [dx.dy.dz], con lo cual todas las tensiones en las superficie de interfase de una partícula genérica pueden ser fácilmente identificadas y definidas, ya que son solamente seis, una por cara.1 De esta manera se puede crear un modelo en el cual el continuo se puede descomponer en el tiempo to, en una matriz de prismas de mesovolúmenes diferenciales [dx.dy.dz], en contacto, que luego se moverán en forma arbitraria, produciéndose diversos fenómenos de rozamiento, compresión y deformaciones entre ellos; en general la matriz original quedará rápidamente desordenada y deformada y los elementos no mantendrán tampoco en general sus posiciones relativas. En la Fig. 1.1_2, hemos dibujado una partícula en esta matriz, en el instante to previo a la deformación y para cada cara del elemento hemos dibujado las fuerzas genéricas reactivas con las partículas adyacentes. El análisis general puede hacerse considerando a la partícula como un cuerpo rígido, en el instante to, la partícula de volumen dv, se considera como congelada en el tiempo en ese instante, si imaginariamente hacemos desaparecer todo el fluido a su alrededor, la partícula debería representarse con una condición
inicial de velocidad lineal →V y una velocidad angular
→ω , independientemente de las tensiones que vayan
a aplicarse en el punto que ocupe en el instante to. Acá recordamos que los fluidos solamente resisten fuerzas de compresión y cuando se mueven tensiones de corte. La viscosidad y las variaciones de velocidad entre partículas eran las variables que intervienen para definir la tensión de corte resistente.
1 La esfera o esferoides en general, delimitan superficies del espacio congruentes desde el punto de vista de la topología con los cubos y prismas , ya que se pueden transformar unos en otros estirando o contrayendo las superficies sin cortar o plegar, como si estuviéramos trabajando en plastilina, y transformamos una esfera en un cubo Estos temas muy interesantes pueden consultarse en What is Mathematics? Courant, Robbins.

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1B Estática Versión preliminar.
3
Se puede hacer un estudio general de las tensiones en la partícula considerándola como cuerpo rígido, en un intervalo muy pequeño, y después determinar los estados de deformación tomando las tensiones con sus sentidos apropiados. Cuando el fluido se considera ideal y no viscoso, solamente intervienen las fuerzas de compresión, descartando las de corte, y lo mismo cuando un fluido aunque sea viscoso está en condición estática, o en un volumen de control acelerado pero sin movimiento relativo entre sus partículas. En el modelo, cada elemento se considera en equilibrio dinámico instantáneo bajo la acción de las fuerzas superficiales en las caras, la fuerza másica y la fuerza inercial, las tensiones en las caras las consideramos en general variables de un punto a otro entre las caras extremas del elemento. Los fluidos pueden considerarse bajo la hipótesis del continuo como cuerpos isótropos, y las tensiones [fuerzas por unidad de superficie], en los diversos puntos de la masa fluida como funciones continuas y derivables con continuidad, de manera que el cambio en las tensiones de un punto a otro no será brusca y se producirá según ecuaciones que aseguren la continuidad. En base a esto, para un elemento dibujado en la Fig. 1.1_2, suponemos un set de tensiones en las caras que contienen los planos de los ejes de referencia, de modo que la variación de tensión en cada cara con respecto a su vecina opuesta puede darse por el primer término de la serie de Taylor, como se indica en la figura. En cada cara del elemento, tendremos un vector de tensión en dirección arbitraria que descomponemos en una tensión normal a la cara [en la dirección de uno de los ejes de referencia] y una componente tangencial sobre la cara, la que a su vez descomponemos en dos componentes referidas a los ejes de referencia restantes.
Fig.1.1_2
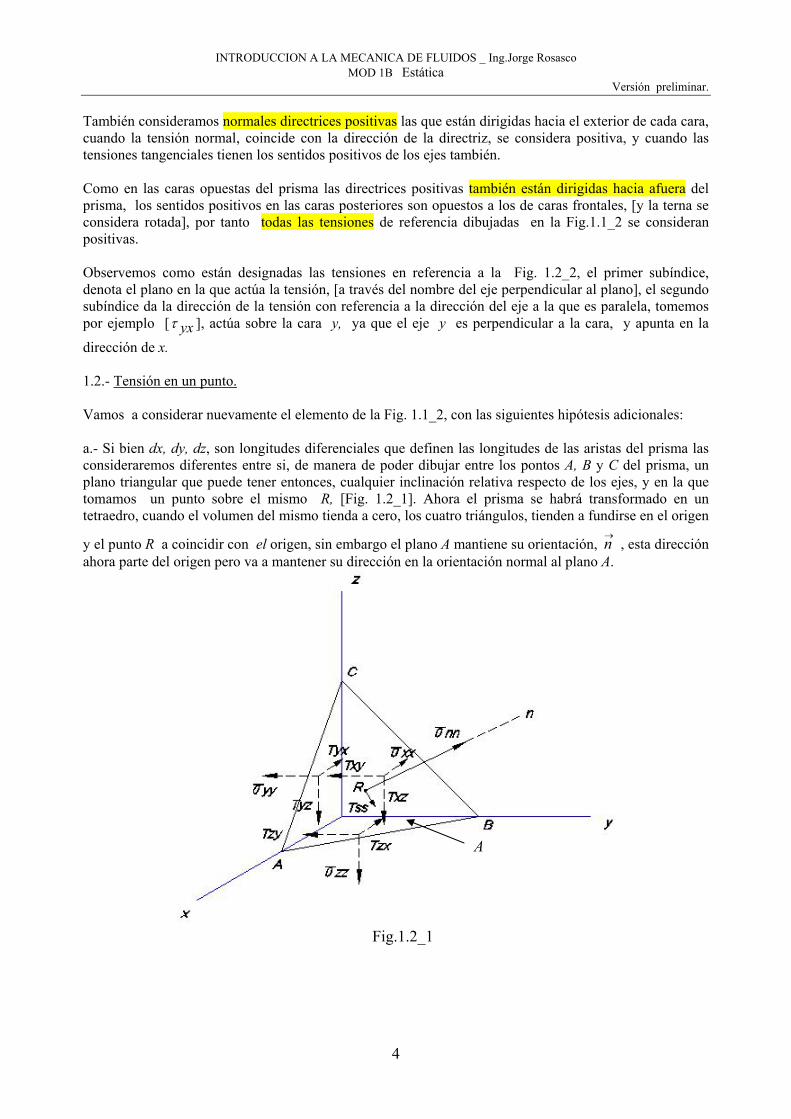
INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1B Estática Versión preliminar.
4
También consideramos normales directrices positivas las que están dirigidas hacia el exterior de cada cara, cuando la tensión normal, coincide con la dirección de la directriz, se considera positiva, y cuando las tensiones tangenciales tienen los sentidos positivos de los ejes también. Como en las caras opuestas del prisma las directrices positivas también están dirigidas hacia afuera del prisma, los sentidos positivos en las caras posteriores son opuestos a los de caras frontales, [y la terna se considera rotada], por tanto todas las tensiones de referencia dibujadas en la Fig.1.1_2 se consideran positivas. Observemos como están designadas las tensiones en referencia a la Fig. 1.2_2, el primer subíndice, denota el plano en la que actúa la tensión, [a través del nombre del eje perpendicular al plano], el segundo subíndice da la dirección de la tensión con referencia a la dirección del eje a la que es paralela, tomemos por ejemplo [ yxτ ], actúa sobre la cara y, ya que el eje y es perpendicular a la cara, y apunta en la
dirección de x. 1.2.- Tensión en un punto. Vamos a considerar nuevamente el elemento de la Fig. 1.1_2, con las siguientes hipótesis adicionales: a.- Si bien dx, dy, dz, son longitudes diferenciales que definen las longitudes de las aristas del prisma las consideraremos diferentes entre si, de manera de poder dibujar entre los pontos A, B y C del prisma, un plano triangular que puede tener entonces, cualquier inclinación relativa respecto de los ejes, y en la que tomamos un punto sobre el mismo R, [Fig. 1.2_1]. Ahora el prisma se habrá transformado en un tetraedro, cuando el volumen del mismo tienda a cero, los cuatro triángulos, tienden a fundirse en el origen
y el punto R a coincidir con el origen, sin embargo el plano A mantiene su orientación, n→
, esta dirección ahora parte del origen pero va a mantener su dirección en la orientación normal al plano A.
Fig.1.2_1
A

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1B Estática Versión preliminar.
5
Si podemos definir entonces una superficie A para la que corresponde una normal →n genérica, entonces A será una superficie orientada en cualquier posición conteniendo un punto R, cuando pasemos al límite el punto R tenderá a coincidir con el origen de coordenadas, y como las longitudes son infinitésimos, este punto podrá ser considerado como genérico dentro de la masa del fluido, y se podrán estudiar la tensión en
el punto para una orientación genérica →n . Como el prisma está en equilibrio dinámico, el plano A tendrá una tensión resultante que mantenga este equilibrio con todas las fuerzas actuantes en el tetraedro, generadas por las tensiones ijii τσ , de las otras
caras, y las fuerzas actuantes, másicas e inercial en el tetraedro. b.- Sobre la pirámide de la Fig. 1.2_1 tendremos fuerzas que provienen de las tensiones o esfuerzos de contacto superficial normales y tangenciales, y además tendremos operando sobre su centro de masa, la
fuerza másica del elemento 1, que es su peso: 6/][][ dxdydzggvgm→→→
≈= ρρ , y presuponiendo en general que el elemento tiene un movimiento acelerado respecto a una terna inercial, habrá también una fuerza
inercial [ ]a dxdydzρ→
≈ / 6. Pero en primera aproximación, podremos despreciar estas dos últimas fuerzas en lo que se refiere a la obtención de la tensión en un punto, porque son infinitésimos de un orden superior cuando se pasa al límite, al estar calculadas por el producto de tres diferenciales, en comparación con las fuerzas superficiales que se calculan en base al producto de dos diferenciales, y por tanto, la condición de equilibrio que define la tensión en el punto R , se obtendrá estudiando el equilibrio únicamente de todas las fuerzas superficiales presentes.
Fig. 1.2_2
1 Ahora consideramos una sola fuerza másica proveniente de un campo conservativo que es el peso del elemento.

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1B Estática Versión preliminar.
6
En la Fig.1.2_2 podemos ver más claramente que el plano A genérico, se define por simplicidad a través
de su versor normal →n y que en general tendrá en un punto R del mismo, una tensión genérica resultante →S , que hemos descompuesto en una tensión normal al plano [ nn
→σ ] y una tensión tangencial al plano
[ ss→τ ].
Estamos ahora en condiciones de plantear el equilibrio de fuerzas para el prisma, en base a las consideraciones anteriores. 1.3.- Fluido en reposo. Si el fluido está en reposo respecto de una terna no-inercial referida al campo fluido, entonces las partículas fluidas ocupan siempre las mismas posiciones relativas entre ellas, cuando están referidas a la terna que acompaña al campo, o sea están en reposo relativo entre ellas, y por tanto no se rozarán y, no se transmitirán esfuerzos tangenciales sino solamente esfuerzos normales, por lo cual todos los esfuerzos o tensiones tangenciales [τ ij] de los diagramas [1.1_2] y [1.2_1], son nulos. Esto nos conducirá a una conclusión importante para los tres casos en los cuales: el campo fluido es estático, el fluido se considere ideal (sin viscosidad) o todas sus partículas están aceleradas en forma uniforme sin variar sus posiciones relativas, y es que las tensiones tangenciales son nulas. Los resultados son de aplicación en Estática de Fluidos, en Fluidos en marcos acelerados, y en Flujos potenciales. Definamos para este caso primero las cuatro superficies importantes referidas a la Fig.1.2_2: A = área del triángulo ABC Ax = área del triángulo OCB Ay = área del triángulo AOC Az = área del triángulo AOB Planteamos ahora el equilibrio de las fuerzas superficiales de la pirámide, cuando tendemos al límite y
trasladamos la normal →n al origen de coordenadas en forma paralela, con lo cual su normal al plano A no cambia:
xAxxnxAnn→∩→
= σσ ]cos[
yAyynyAnn→∩→
= σσ ]cos[ [1.2.1]
zAzznzAnn→∩→
= σσ ]cos[
Tome en cuenta que en las expresiones anteriores ][],[],[∩∩∩nznynx son los ángulos directores de los ejes y
los cosenos de estos ángulos, los cosenos directores. También desde la geometría sabemos que:
AxnxA =∩
]cos[
yAnyA =∩
]cos[
zAnzA =∩
]cos[ Entonces reemplazando en las [1.2.1] y simplificando:
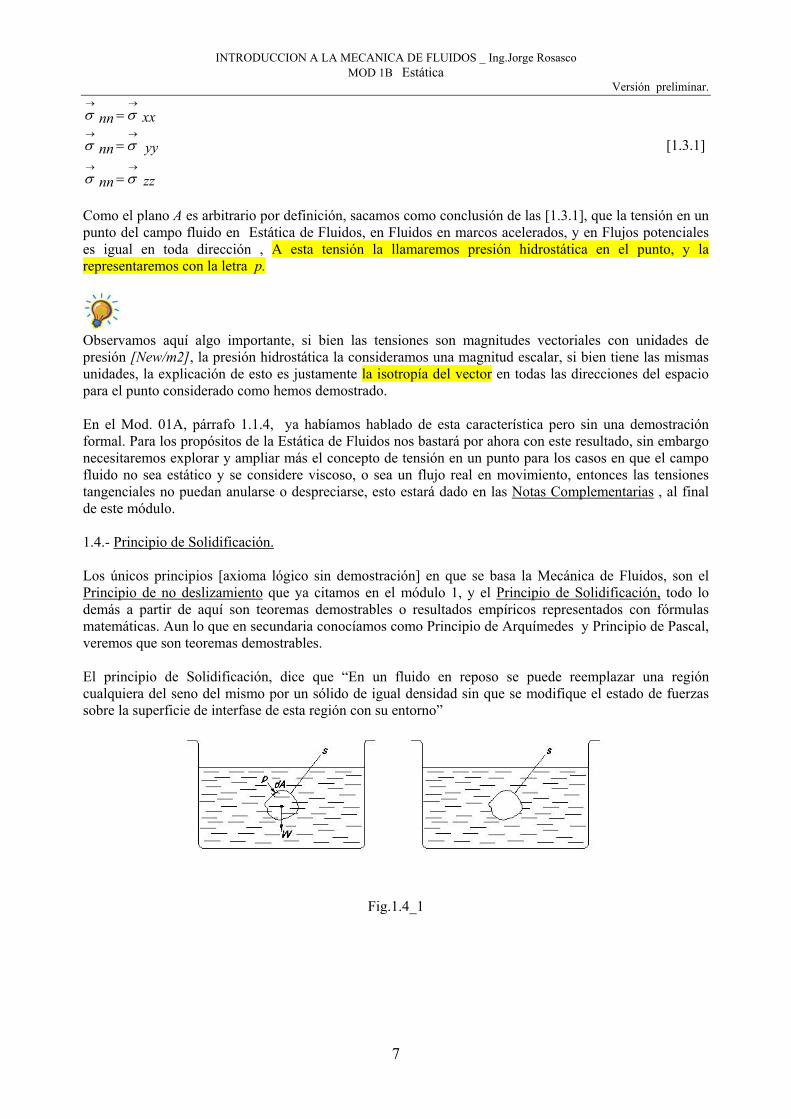
INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1B Estática Versión preliminar.
7
xxnn→→
= σσ
yynn→→
= σσ [1.3.1]
zznn→→
= σσ Como el plano A es arbitrario por definición, sacamos como conclusión de las [1.3.1], que la tensión en un punto del campo fluido en Estática de Fluidos, en Fluidos en marcos acelerados, y en Flujos potenciales es igual en toda dirección , A esta tensión la llamaremos presión hidrostática en el punto, y la representaremos con la letra p.
Observamos aquí algo importante, si bien las tensiones son magnitudes vectoriales con unidades de presión [New/m2], la presión hidrostática la consideramos una magnitud escalar, si bien tiene las mismas unidades, la explicación de esto es justamente la isotropía del vector en todas las direcciones del espacio para el punto considerado como hemos demostrado. En el Mod. 01A, párrafo 1.1.4, ya habíamos hablado de esta característica pero sin una demostración formal. Para los propósitos de la Estática de Fluidos nos bastará por ahora con este resultado, sin embargo necesitaremos explorar y ampliar más el concepto de tensión en un punto para los casos en que el campo fluido no sea estático y se considere viscoso, o sea un flujo real en movimiento, entonces las tensiones tangenciales no puedan anularse o despreciarse, esto estará dado en las Notas Complementarias , al final de este módulo. 1.4.- Principio de Solidificación. Los únicos principios [axioma lógico sin demostración] en que se basa la Mecánica de Fluidos, son el Principio de no deslizamiento que ya citamos en el módulo 1, y el Principio de Solidificación, todo lo demás a partir de aquí son teoremas demostrables o resultados empíricos representados con fórmulas matemáticas. Aun lo que en secundaria conocíamos como Principio de Arquímedes y Principio de Pascal, veremos que son teoremas demostrables. El principio de Solidificación, dice que “En un fluido en reposo se puede reemplazar una región cualquiera del seno del mismo por un sólido de igual densidad sin que se modifique el estado de fuerzas sobre la superficie de interfase de esta región con su entorno”
Fig.1.4_1

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1B Estática Versión preliminar.
8
La figura ilustra la situación en la que un volumen interno cualquiera de fluido v, limitado por una superficie imaginaria S, es reemplazado por un volumen igual y de igual superficie exterior compuesto por un material de la misma densidad que el fluido circundante, parece lógico suponer que el fluido exterior al volumen no podrá “darse cuenta” del cambio y nada sucederá con el cuerpo que permanecerá entonces ocupando la misma región sin moverse. 1.5.- Teorema de Arquímedes. Refiriéndonos a la Fig. 1.4_1, como ahora estamos en presencia de una macro región, el equilibrio estará planteado de manera que las fuerzas superficiales normales o fuerzas de presión estarán en equilibrio con la fuerza másica o sea el peso W. Matemáticamente, esto sería:
∫∫→→
=VS
dvfdSnp [1.5.1]
En esta expresión,
→→→−=−= kgkf ργ
es la fuerza por unidad de volumen o peso específico, ya que
→→
→→→
−=−=→= kgkgvm
vWgmW ρ , reemplazando:
∫∫∫∫→→→→
=−⇒−=VSVS
dvkgdSnpdvkgdSnp ρρ [1.5.2]
expresado en palabras, un cuerpo sumergido recibe un empuje neto de abajo hacia arriba numéricamente igual al peso del fluido desalojado. El teorema es una especie de corolario del Principio de solidificación. El punto donde se aplica la resultante de las fuerzas de presión en el cuerpo se denomina centro de presión y a veces centro de empuje , de hecho, la integral del primer miembro de la [1.5.2] se denomina Empuje y
se representa con la letra E→
, el segundo miembro, corresponde al peso W→
, que se ubica en el centro de masa En la figura siguiente Fig.1.5_1, se representan varias situaciones referidas a este esquema, y se analizan los casos en que las densidades de la región y del fluido sean diferentes, que dan lugar a las leyes de la estabilidad y la flotabilidad.
Fig. 1.5_1

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1B Estática Versión preliminar.
9
a.- El caso corresponde al cuerpo con igual densidad que el fluido que lo circunda, el centro de presión, coincide con el centro de masa, las fuerzas de empuje y peso son iguales, y se establece una condición de equilibrio indiferente. b.- En este caso, el empuje y la posición del centro de presión no han variado, porque la forma del cuerpo es siempre igual, pero la densidad del cuerpo es ahora mayor que la densidad del fluido que la rodea, el cuerpo se hundirá en forma estable. c.- El cuerpo tiene menor densidad, el empuje supera al peso, y el cuerpo saldrá a la superficie y flotará en forma estable siempre que su centro de masa se mantenga por debajo del centro de presión cuando quede parcialmente sumergido. d.- La densidad es menor, igual que antes y el empuje supera al peso pero originalmente el centro de masa está por encima del centro de presión, el cuerpo tenderá a la flotabilidad pero en forma inestable, trata de rotar 180º de manera de colocarse en posición estable. Otras alternativas y combinaciones son posibles, pero la idea general es la planteada, tenga en cuenta que en todos los casos el empuje lo define la superficie que rodea al cuerpo, y que por tanto será siempre la misma al igual que la posición del centro de presión. 1.6.- Ley fundamental de la Estática de Fluidos. Ahora vamos a aplicar un resultado ya estudiado en Cálculo llamado Teorema del gradiente. El teorema del Gradiente, permite transformar una integral de área extendida a un campo escalar en una integral de volumen aplicada sobre el gradiente de dicho campo.
∫∫ =→
VA
dvgradAdn φφ donde φ es un campo escalar genérico.
Si lo aplicamos al resultado [1.5.1], considerando que como vimos anteriormente, el campo de presiones es un campo escalar ya que la presión fue considerada escalar, y como las demás propiedades es una función continua del entorno fluido, entonces tenemos:
∫∫→→
=VS
dvfdSnp se puede escribir como:
0=− ∫∫→→
SV
dSnpdvf y aplicando el Teorema del gradiente,
0=−→
pgradf [1.6.1] Al tener dos integrales de volumen los integrandos pueden unificarse, y el resultado aplicarse a un volumen diferencial y obtenerse así una ecuación diferencial vectorial [1.6.1] (el gradiente de una función escalar como la presión da un vector, dando compatibilidad a la ecuación).
→=− ∫∫→
0VV
dvpgraddvf

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1B Estática Versión preliminar.
10
A este resultado se lo denomina Ecuación fundamental de la hidrostática. Si bien con un significado no muy intuitivo, la ley fundamental es de gran aplicación para arribar a resultados aplicables en ingeniería como veremos ahora. 1.7.- Definición de superficie isobárica. Se denomina superficie isobárica, a una superficie de equipresión en el seno del fluido, si estamos en un
punto cualquiera dentro del fluido y trazamos desde allí, un segmento diferencial →ds , podríamos definir
matemáticamente que el segmento pertenece a una línea de equipresión si:
0=→ds
dp
de donde podemos deducir que siendo →ds diferente de cero, dp = 0
También podemos expresar:
→→→→++= kdzjdyidxds
El segmento diferencial es un camino arbitrario que define dos versores, uno tangente y uno normal sobre lo que se denomina una coordenada intrínseca, lo que hemos hecho es expresar el segmento en coordenadas cartesianas. Vamos a aplicar ahora la ecuación fundamental [1.6.1], a la que multiplicamos
escalarmente por →ds en ambos miembros: →→→
∗=∗ dspgraddsf [1.7.1] Si desarrollamos el segundo miembro:
dpdpkdzjdyidxkzp
jyp
ixp
dspgrad ==++∗∂∂
+∂∂
+∂∂
=∗→→→→→→→
3][][
Pero como sobre la línea de equipresión d p = 0, resulta de la anterior:
0
0
=∗
→=∗→→dsf
dspgrad
Lo que implica que:
→→→→⊥−→⊥ dskgdsf ρ
Entonces en hidrostática, las líneas de equipresión, pertenecerán a planos perpendiculares a z, es decir podemos concluir que todos los planos x,y horizontales poseen igual presión al igual que cualquier línea sobre ellos. 1.8.- Teorema de Pascal. Una perturbación de presión en un punto cualquiera en el seno de un fluido, se manifiesta en forma instantánea en todos los puntos del fluido. Para la demostración, hacemos referencia a la Fig.1.8_1

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1B Estática Versión preliminar.
11
Fig.1.8_1
Partimos como antes de la ecuación fundamental [1.6.1]:
0=−→
pgradf que la podemos expresar como:
][→→→→
∂∂
+∂∂
+∂∂
== kzp
jyp
ixp
pgradf
tomemos ahora una variación en la dirección z, reemplazamos el valor de f e igualemos
→Δ−
=ΔΔ
=−→→→k
zPPk
zp
kg ]12[ρ
zgzpzPP
Δ−=Δ−=Δ→Δ−
=− ργγ ]12[ [1.8.1]
Para este resultado, vemos que si variamos 11 a 1 PPP Δ+ , debe variar también 22 a 2 PPP Δ+ , para que no haya variación de la ecuación, [1.8.1], lo cual también se cumple para el punto P2’, ya que este está sobre la línea isobárica de P2 y por tanto recibe la perturbación, es decir la perturbación ∆p se trasmite también de P1 a P2’, con lo que queda demostrado el teorema. La [1.8.1] nos permite expresar también la diferencia de presión entre dos puntos separados por una cota ∆z.
]21[1]12[112 zzgPzzgPzgPP −+=−−=Δ−= ρρρ [1.8.2] que es la ecuación fundamental de la manometría
Fig. 1.8_2

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1B Estática Versión preliminar.
12
1.9.- La Presión atmosférica. La presión atmosférica, se considera una presión hidrostática y queda definida como la fuerza por unidad de superficie que ejerce la masa de aire que se prolonga verticalmente por toda la altura de la capa de aire que rodea la Tierra, esta capa de aire no tiene un final abrupto, sino que los componentes de la atmósfera gaseosa se van enrareciendo con la altura, y puede considerarse que su efecto es poco influyente en la presión a partir de los 80 Km de altura. La presión atmosférica estándar para la superficie terrestre es 1 atm, y este valor corresponde al equilibrio de la misma con una columna de 760 mm de mercurio el que es tomado a un valor de densidad de ρ = 13 595 Kg/m3, (valor que corresponde a tomar el valor de su densidad a 0ªC.), y con un valor de aceleración de la gravedad estándar de g = 9.807m/s2 ; con estos datos la presión atmosférica estándar expresada en KN/m2 o KPa, resulta:
atmmKNm
sm
mKg
hgatp 1]2[33.101][760.0]2[807.9]3[13595 ==== ρ
También se defina a veces la atmósfera técnica [at] que no debe ser confundida con la [atm] aunque sus valores son muy parecidos definiéndola como:
]2[07.98]2[807.9]2[1][1mKN
cmN
cmKgf
at ===
Escalas de presión, y unidades de presión. La presión como propiedad escalar de campo en base a las consideraciones hechas anteriormente está referida a [unidades de fuerza / unidades de superficie], más adelante se da una tabla con las unidades más usuales: En los problemas de ingeniería suele ser usual el uso de dos tipos de presión:
Presión absoluta Presión manométrica.
En referencia a la Fig.1.9_1, la presión absoluta es la presión total referida al vacío absoluto o a las condiciones de vacío del espacio exterior, tomando como referencia o base de la escala la presión de vacío = 0 [Pa], a partir de este valor se miden todas las demás presiones, por ejemplo a nivel del mar la presión corresponde como dijimos al peso total de la columna de aire y su valor estándar es: Patm =
][33.1010133.1][1]2/[0133.1 KPabaratmcmKg === . La Presión manométrica es una escala que pone un cero relativo en el valor de la Presión atmosférica normal, puede ser positiva (caso Pman 1), o bien negativa (caso Pman 2) a veces llamada presión de succión o de vacío parcial, en este último caso, comprendidas en la escala manométrica entre (0 y . -1atm) siendo la presión de vacío absoluto en la escala manométrica -1[atm] = [-1,0133 bar]. La relación que liga el pasaje de uno a otro sistema es muy simple ya que:
atmPabsPmanP −= [1.9.1]

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1B Estática Versión preliminar.
13
Fig.1.9_1
Relación entre diversas unidades de Presión
1.10.- Las bases de la Manometría. Todos los problemas de manometría pueden resolverse por aplicación de la ecuación [1.8.2], lo veremos aplicado a un ejemplo simple, que se refiere a la Fig. 1.10_1. Se trata de medir la presión absoluta y manométrica en el depósito que contiene un gas a presión P, con un manómetro en “U”,
Fig.1.10_1

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1B Estática Versión preliminar.
14
El manómetro contiene dentro del tubo, una sustancia líquida de densidad ρ, típicamente mercurio. Tomando como referencia el punto O de la base del manómetro en U , podemos escribir, aplicando la [1.8.2]:
2zgatmpop ρ+= (rama izquierda)
1zgpop ρ+= (rama derecha) ahora restamos ambos resultados:
→−+−= ]12[][0 zzgpatmp ρ
zgatmpp Δ+= ρ Cuando se requiere mayor precisión en la lectura, podemos trabajar con la rama izquierda inclinada, como se ve en la Fig. 1.10_2 lo que permite lograr una mayor sensibilidad, ya que la longitud ∆L > ∆z lo que permite graduar más marcas en el tubo, para el mismo rango de presiones que en el aparato anterior sin embargo no se debe perder de vista que el desnivel ∆z es el mismo en ambos casos.
Fig.1.10_2
La obtención de la presión manométrica dentro del depósito es inmediata a partir de la [1.9.1],
zgatmppmanp Δ=−= ρ observe los siguiente, la presión manométrica se podría haber obtenido directamente, si se hubiera considerado nula la presión atmosférica . 1.11.- Fuerzas sobre superficies planas sumergidas. Consideremos una tapa exclusa sumergida en el lateral del depósito indicado por la Fig.1.11_1, en el cual también se observa la proyección abatida de la tapa. En este tipo de problemas , interesa poder conocer la fuerza aplicada en la tapa para resolver su diseño estructural.

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1B Estática Versión preliminar.
15
Fig.1.11_1
A partir de la Ec [1.8.2], la presión absoluta en un punto sumergido genérico cualquiera de la placa es:
12 1p p g h p hρ γ= + = + En la mayoría de las aplicaciones la presión atmosférica puede ser despreciada frente a la presión del fluido, además en muchos casos, como el ejemplo, la presión p1 corresponde a la atmosférica, y como en la parte inferior de la placa tenemos muy aproximadamente p1, quedará como presión neta sobre la placa, la manométrica:
hhgp γρ ==2 Una pequeña área diferencial sumergida, presentará una fuerza normal a la placa:
→= dAhRdF γ
∫∫∫ ===AAA
ydAydAhRF θγθγγ sinsin
y como, la última integral corresponde al momento de de primer orden o momento de área de la superficie:
sin
CMA
CM
ydA y A
F y AR γ θ
= →
=
∫
En esta última, A es el área total de la tapa. Para establecer la posición del punto de aplicación, tomamos el momento de la resultante respecto de un punto genérico, pero que nos conviene tomar O , que es la intersección del plano de la superficie con la extensión de la línea de nivel del depósito. Definamos una coordenada oblicua desde O que llamaremos y’ donde y’ es el punto de aplicación de la resultante FR, tomando momentos respecto de O tendremos:
2' sin [ ] sinA A
F y y ydA y dAR γ θ γ θ= =∫ ∫

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1B Estática Versión preliminar.
16
Como la última integral representa el momento de inercia respecto de un eje perpendicular a y que pasa por el CM de la placa,
AyJxx
AyxxJ
FxxJy
xxJdAy
CMCM
A
===
→=∫
θγθγθγ
sinsinsin'
2
Como por el Teorema de Steiner, referido a las propiedades del momento de inercia tenemos:
2CMCMJ J A yxx = +
Donde JCM, es el momento de inercia respecto a un eje paralelo a x, que pasa por el Centro de Masa. tendremos finalmente reemplazando en la anterior:
AyJy
AyyAJ
yCM
CMCM
CM
CMCM+=
+=
2'
Parta más claridad, ampliamos el dibujo de la tapa en la Fig.1.1.1_2
Fig.1.11_2

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1B Estática Versión preliminar.
17
1.12.- Fuerza sobre superficies curvas sumergidas. Lo analizaremos a través de un ejemplo, referido a la Fig. 1.12_1, en el cual se ve una placa curvada en forma parabólica y de ancho b que subtiende un espejo fluido de altura total hT, , en la cual investigamos la fuerza total sobre la placa, y el punto de aplicación de la resultante.
Fig.1.12_1
Supondremos que sobre el espejo de fluido como por debajo de la placa parabólica tenemos aire, con lo cual podremos trabajar solamente con la presión manométrica del fluido sobre la placa. Lo que se hace en los casos de tener superficies curvas, es trabajar con las áreas proyectadas de la superficie curva según el plano horizontal y vertical, y calcular por componentes.
∫∫∫ ====AAA
dybhpdAxdFxxF γ
como
2
2
02
2
0)()(
0
ThbThyThyThbdyyThdyyThbFx
yThh
A
hT γγγ =−=−=−=
→−=
∫ ∫
Análogamente:
∫∫∫ ====AAA
dxbhpdAydFyFy γ
Observemos que estamos integrando según x , por lo que cuando y = 0, x = 0, cuando TyxTyy == ,
=+−=−−=−−=
→−=
∫ ∫ ]03
3
0[)2()2(
2
0
ThxThxThbdxxThbdxxThbFy
xThh
A
Thγγγ
2/332
3
2/32/3 ThbThb
ThbFy γγ
γ −=+−=
Una vez obtenidos Fx y Fy podemos calcular la resultante, con su módulo y su ángulo,
][
22
FxFy
tginv
FyFxRF
=
+=
α

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1B Estática Versión preliminar.
18
como no puede haber fuerzas tangenciales sobre la superficie, debido a su carácter de problema hidrostático, resulta lógico pensar que la resultante debe ser un vector normal a la superficie, y por tanto, encontrando el punto donde la dirección de la resultante coincida con la normal a la curva allí tendremos el punto de aplicación, o sea el centro de presión.
Fig.1.12_2 hallamos primero el ángulo opuesto a la dirección normal a la curva, para el punto de aplicación de FR
αβ −= º90 luego observamos que por mutuas perpendiculares el ángulo β es también el ángulo de la tangente a la curva, entonces, en nuestro ejemplo:
222 1/ 2 ; 1/ 4dytg x x tg y x tgdx
β β β= = ⇒ = = =
1.13.- Fluido en un campo de aceleración constante. Caso 1, según se indica en la Fig.1.13_1, se tiene un depósito conteniendo un líquido acelerado, con el
vector aceleración en dirección oblicua →a , se desea conocer la nueva posición de la superficie libre o espejo con relación al depósito acelerado en forma uniforme.
Fig.1.13_1
Aplicamos la ecuación fundamental, Ec.[1.6.1]
0=−→
pgradf de la cual deducimos.

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1B Estática Versión preliminar.
19
pgradf =→
que expresada en componentes da:
yp
yf
xp
xf
∂∂
=
∂∂
= [1.13.1]
Como de acuerdo a la segunda ley, →→
= amF , si dividimos en ambos miembros por el volumen
obtendremos la fuerza específica referida a volumen →f , o sea:
→→= af ρ , entonces para nuestro ejemplo,
podremos expresar las [1.13.1] y teniendo en cuenta que la terna esta sobre el depósito (terna no inercial) como:
yp
yag
xp
xa
∂∂
=−−
∂∂
=−
ρρ
ρ
Como de acuerdo a la definición de variación incremental1:
dyyp
dxxp
dp∂∂
+∂∂
=
reemplazando e integrando:
Cygyaxxap +++−= ]][[ ρρ Para averiguar la constante de integración, consideramos las condiciones en el punto 0, o sea el origen de la terna no inercial, en este punto la presión absoluta es:
atpCyx
atpp=→
===
00
reemplazando, para los puntos de la superficie libre:
0]][[ ]][[
=++→+++−=
ygyaxxaatpygyaxxaatp
ρρρρ
Finalmente la ecuación de la superficie libre respecto de la terna no inercial sería:
xgya
xaxgya
xay ][
][ +−=
+−=ρρ
[1.13.2]
o sea la ecuación de una línea recta de pendiente negativa, un resultado útil también se obtiene a partir del resultado [1.13.2], para el caso del depósito sometido solamente a una aceleración horizontal, simplemente
1 El concepto de variación incremental de una propiedad es ampliado en el Mod. 2 punto 2.4.

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1B Estática Versión preliminar.
20
eliminando la componente vertical de la aceleración, en este caso la recta del espejo fluido tiene como ecuación:
xgxay ][−= [1.13.3]
Caso 2. según se indica en la Fig.1.13_2, el recipiente conteniendo un líquido de peso total W, se desplaza en forma vertical arrastrado por un peso W1 a través de una polea sin rozamiento, se desea conocer la presión en el fondo del recipiente.
Fig:1.13_2
La aceleración del sistema, puede calcularse como:
]1
1[
][1
WWWWgya
yag
WWiWW
+−
=
→+
=−
La presión en el fondo del depósito será:
)]11(1[][
WWWWghyagp
+−
+=+= ρρ
Aplicando este resultado a la expresión ya obtenida [1.13.2], para la ecuación de la línea del espejo a partir del punto O de la referencia no inercial:
xgya
xay ][+
−=
resulta,
0=y o sea una superficie libre horizontal para el espejo.

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1B Estática Versión preliminar.
21
Caso 3. Superficie libre en un cilindro en rotación de velocidad angular constante según el eje z, con aceleración constante en dirección radial para cada radio, (vórtice forzado) según se indica en la Fig.1.13_3:
rVrra
22 == ω
Fig.1.13_3
Vamos a considerar las componentes de la fuerza actuante por unidad de volumen sobre una partícula ubicada sobre la superficie del espejo, tendremos aplicada por un lado la fuerza centrífuga, ya que nos situamos sobre la partícula con sistema de referencia no inercial, y la fuerza gravitatoria, ambas por unidad de volumen.
rv
rmfc
vFc
rVmcF 222
ωρω
===→=→
→→
entonces tendremos para coordenadas cartesianas:
→→→→−+= kgjrirf ρθωρθωρ sin2cos2
obsérvese que la fuerza centrifuga genera una especie de gravedad artificial y puede integrarse junto a la fuerza gravitatoria como una fuerza de campo inercial junto a la gravedad, el signo lo determina el coseno del ángulo de acuerdo a la posición, ahora aplicamos la ecuación fundamental:
0=−→
pgradf Desarrollando, y llamando γ, al peso específico:

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1B Estática Versión preliminar.
22
dzdzgpgzp
dyrpryp
dxrprxp
γργρ
θωρθωρ
θωρθωρ
−=−=∂→−=−=∂∂
=∂→=∂∂
=∂→=∂∂
sin2sin2
cos2cos2
entonces, el incremental de presión será:
dzdyrdxrdp γθωρθωρ −+= sin2cos2 Integrando esta última expresión:
zr
zyxCp γωρ
γωρ
−=−+=+2
22]22[
2
2 [1.13.4]
de esta se observa que las superficie libre, y las superficies de equipresión son paraboloides de revolución según el eje z, a partir de tomar la condición particular del punto del origen O, permitirá calcular la constante:
ozatpCozCatp γγ −−=→−=+ entonces, reemplazando ese valor obtenido en la expresión general [1.13.4] queda:
][22
2][]22[
2
2][ zozrzozyxatpp −−=−−+=− γωργωρ
cuando:
→−+=−+=
→===
][22
2][2
2
20
, ,
HozgRHozR
atppHzRr
ρωρ
γωρ
gR
ozH2
22ω=− [1.13.5]
esta última nos da la diferencia de alturas de la depresión que forma el vórtice forzado. Si llamamos h, al nivel horizontal del espejo en la condición de remanso es decir antes de comenzar la rotación del recipiente con velocidad angular ω, y considerando que los volúmenes inicial y final de líquido son los miamos, podemos escribir:
][22122 ozHRHRhR −−= πππ
Donde el último término, representa el volumen del paraboloide de revolución hueco, operando en la anterior:

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1B Estática Versión preliminar.
23
ozhHozHh
ozRHRhR
−=→+=
→+=
2][21
2212
212 πππ
reemplazando estos resultados en la [1.13.5]
gRhoz
gR
ozh4
22
2
222 ωω
−=→=−
que es la expresión de la posición de la depresión a partir de los datos del problema, análogamente:
]4
22[
2
22
2
22
gRh
gR
ozgRH ωωω
−+=+= [1.13.6]
que es la posición de altura máxima alcanzada por el líquido, la ecuación de la superficie de revolución venía dada por:
][22
2][]22[
2
2][ zozrzozyxatpp −−=−−+=− γωργωρ
como en los puntos sobre la superficie, atpp = , la ecuación de la superficie es:
0][22
2=−− zozr γωρ o bien:
0][]22[2
2=−−+ zozyx γωρ
Se puede usar este dispositivo para evaluar las revoluciones de una base rotatoria, midiendo las alturas, h y H y aplicando la [1.13.6]. [] Notas Complementarias. a.- Tensión en un punto de la masa fluida en general. En el punto 1.1, habíamos hecho un primer análisis de la tensión en un punto genérico de la masa fluida, y dijimos que en el caso de fluidos estáticos, en movimiento MRU o en movimiento respecto a un marco acelerado, y en general cuando no variara la posición relativa de las partículas fluidas entre si, podíamos eliminar las componentes de las tensiones que produce el rozamiento entre partículas, es decir, hacíamos los τij=0. Esto es válido también para fluidos ideales [o inviscidos] en movimiento, ya que se considera nula su viscosidad dinámica [μ=0]. Estudiaremos ahora el caso de la tensión en un punto en el caso general, es decir, cuando no existen las simplificaciones anteriores y los τij no pueden anularse, es el caso común de fluidos reales en movimiento, laminar o turbulento, flujo en canales, tuberías o flujos externos en torno a objetos en las proximidades de la superficie bañada por el fluido, [capa límite] etc.
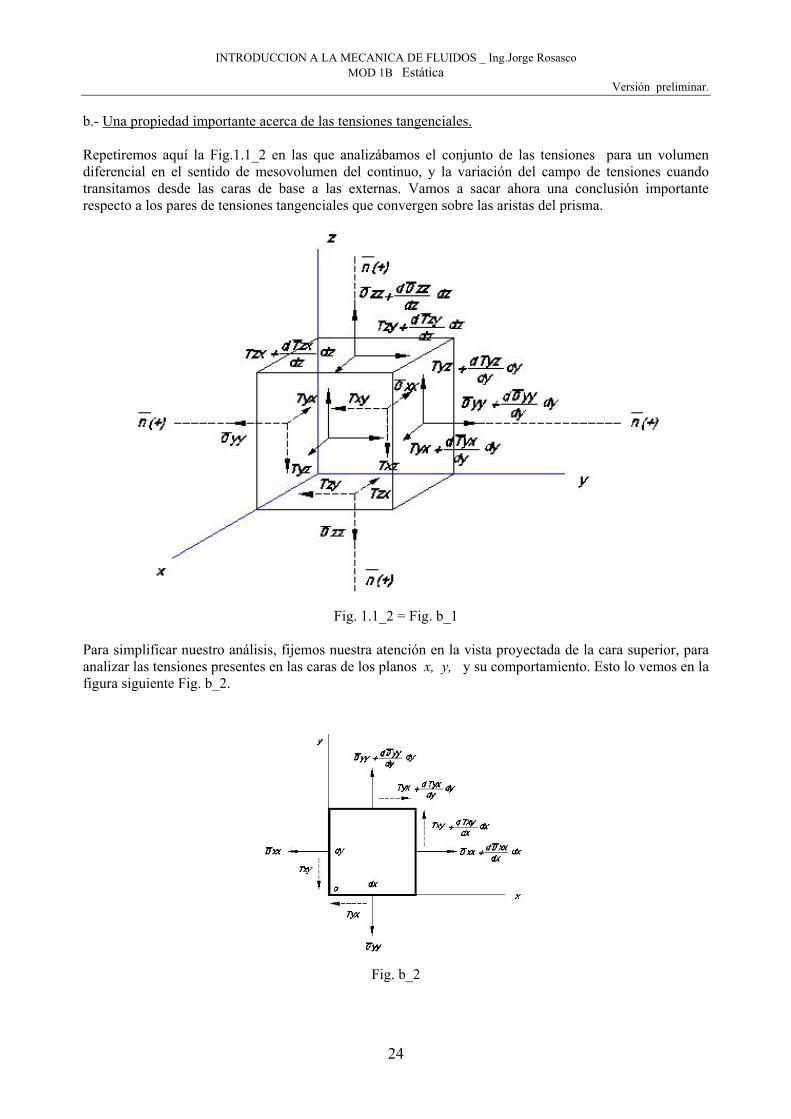
INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1B Estática Versión preliminar.
24
b.- Una propiedad importante acerca de las tensiones tangenciales. Repetiremos aquí la Fig.1.1_2 en las que analizábamos el conjunto de las tensiones para un volumen diferencial en el sentido de mesovolumen del continuo, y la variación del campo de tensiones cuando transitamos desde las caras de base a las externas. Vamos a sacar ahora una conclusión importante respecto a los pares de tensiones tangenciales que convergen sobre las aristas del prisma.
Fig. 1.1_2 = Fig. b_1
Para simplificar nuestro análisis, fijemos nuestra atención en la vista proyectada de la cara superior, para analizar las tensiones presentes en las caras de los planos x, y, y su comportamiento. Esto lo vemos en la figura siguiente Fig. b_2.
Fig. b_2

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1B Estática Versión preliminar.
25
Algo para observar, es que las tensiones tangenciales que actúan en las caras del prisma, aparecen dibujadas de a pares opuestos, ya sea flecha con flecha o cola con cola, probaremos que las tensiones tangenciales sobre las caras siempre forman pares opuestos y además que cada par de tensiones tangenciales que convergen o divergen en una arista, son iguales entre si. Por ser infinitesimal el tamaño del elemento, en el instante inicial, antes de su deformación, puede considerarse como un cuerpo rígido inmerso en una región isótropa, no obstante esta región conformada por el elemento y una parte de su entorno, debemos considerarla en un estado dinámico en el cual la región en su conjunto y el elemento como parte de ella, puede estar sometida a deformación., movimiento con una aceleración lineal, y también rotación con una aceleración angular, rotando sobre un vector de velocidad angular instantánea:
→→→++= kzjyix ωωωω
pero es importante observar que la partícula individual no rotará respecto a sus vecinas sino que lo hará como parte del conjunto, para que exista una aceleración angular, debe haber un momento externo de rotación aplicando debido a las fuerzas presentes del entorno de la región,
→→→→++= kzMjyMixMM [b1]
este momento comenzará a deformar la región y contribuirá a deformar a la partícula., si consideramos la componente del momento de rotación o torque en el plano dibujado, Mz, y utilizamos las ecuaciones de Euler para el movimiento de un cuerpo rígido, lo que es válido en el pequeño intervalo considerado será:
ywxwJxxJyydt
xdwJzzMz ][ −+= [b2]
Por supuesto hay otras dos componentes del momento como indica [b1], pero vamos a seguir analizando la componente que actúa según el eje z, el momento externo es “resistido” dinámicamente por la inercia de la partícula y por las fuerzas de rozamiento, ahora aplicamos los momentos de inercia para el paralelepípedo rectangular, y sustituimos en ambos miembros de la ecuación [b2]:
ywxwdzdydzdxdxdydz
dydxdzdy
yyx
yxdy
dxdzyxdxdydzdx
xxy
xydxdzdyxy
)]22()22[(12
2][
22][
2
+−+=
=∂∂
+−−∂∂
++
ρ
τττ
τττ
dividiendo miembro a miembro por el volumen diferencial de la partícula, dxdydz: y pasando al límite: dx→0, dy→0, dz→0 la ultima queda:
yxxy ττ = observe que esto significa que los módulos de las componentes de la tensión son iguales y que los sentidos adoptados en el diagrama b_2 eran los correctos. Así las tensiones de corte o bien apuntan o bien parten de las aristas del prisma infinitesimal, repitiendo el mismo procedimiento para las otras dos componentes del momento, podemos probar entonces completamente la ley de paridad de las tensiones de corte.
yxxy ττ =
yzzy ττ = [b3] xzzx ττ =

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1B Estática Versión preliminar.
26
Para todo esto se puede dar otra demostración tal vez menos rigurosa, pero más simple, decimos que el estado de tensión cuando se refiere a las tensiones de corte sobre el elemento debe cumplir la ley de paridad, o en otras palabras que el tensor de tensiones debe ser simétrico. Supongamos que esto no sea así, y que las tensiones en los vértices tuvieran sentidos no concurrentes, y distintos entre si, como vemos en la figura siguiente [Fig. b_3]
Fig. b_3
ahora las componentes de tensión tangencial generan una rotación cuyo momento es proporcional a dx o dy , por otra parte, la masa inercial de rotación es el momento plano de inercia para el eje z, y es proporcional al producto 1 .3)(dxdy , entonces, la aceleración angular del elemento sería del orden
3)(2/1 dydxkdxk=α , o sea que cuando el volumen diferencial tienda a cero, la aceleración angular tendería a infinito, lo que es un imposible físico, y se crearía una singularidad, por tanto debe cumplirse la ley de paridad y no puede haber un momento no compensado sobre la partícula. La conclusión más interesante de esto, es que una partícula no puede rotar en forma aislada respecto a sus vecinas, y la rotación es un fenómeno que debe producirse en una macro región mayor que un mesovolumen. c.- El tensor de Tensiones. Vamos a considerar ahora un punto interior a la partícula. Como ya vimos una forma de hacerlo es tomar un plano que segmente al prisma de la Fig. b_1 en forma arbitraria y que contenga un punto R . Queda definida una pirámide de lados desiguales pero diferenciales, con lo cual podemos estudiar la tensión en la superficie del corte en una dirección arbitraria. Repetimos aquí el diagrama de la Fig. 1.2_2:

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1B Estática Versión preliminar.
27
Fig,1.2_2= Fig. c_1
El propósito es calcular la tensión en el punto R del plano con orientación →n y hacer tender el volumen
del elemento a cero con lo cual tendremos el valor de la tensión en un punto genérico del campo O para la
orientación arbitraria. →n . Como la partícula está en equilibrio instantáneo con sus vecinas al hacer el
corte ABC se deben colocar las fuerza AS→
sobre el plano ABC donde A es el área del plano ABC. para
restituir el equilibrio, donde →S es la tensión resultante sobre el plano de corte.
A continuación en la figura [c_1], , hemos descompuesto la tensión →S en una componente normal al
plano nnσ y en una componente tangencial contenida sobre el plano ssτ . Ahora vamos a hacer una
descomposición vectorial diferente de la tensión →S , en sus componentes según los ejes del sistema de
referencia que llamaremos Sx, Sy, y Sz,. esto lo vemos en la figura siguiente c_2:
Cuando el volumen diferencial tiende a cero, podemos escribir para la dirección x:
0=−−− dAnzxdAmyxdAlxxSxdA ττσ
Fig. c_2

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1B Estática Versión preliminar.
28
como según demostramos por la ley de paridad: yxxy ττ = , yzzy ττ = , xzzx ττ = podemos reescribir la anterior , simplificando dA :
nxzmxylxxSx ττσ ++= [c1] recordamos que m, l n, son los cosenos directores de la normal al plano, Procediendo análogamente con las otras dos componentes:
nyzmyylyxSy τστ ++= [c2]
nzzmzylzxSz σττ ++= [c3] para la componente de la tensión normal podemos escribir::
dA S ldA S mdA S ndAx y znnσ = + + → nzSmySlxSnn ++=σ [c4]
y como:
2222222222
nnSzSySxnnSss
Sssnnσστ
τσ−++=−=
→=+ [c5]
reemplazando en [c4] los valores [c1], [c2] y [c3] queda:
[c6]
2]222222[
2][2][2][2
nlxzmnyzlmxynzmylx
nzzmzylzxnyzmyylyxnxzmxylxxssτττσσσ
στττστττστ+++++−
−++++++++= [c7]
observamos entonces de [c6] y[c7],que las componentes de la tensión →S , ( nnσ y ssτ ) sobre un plano A
de orientación genérica interno de la partícula, pueden ser expresadas en función de las seis componentes independientes de las tensiones componentes y de los cosenos directores de la normal al plano. Las ecuaciones [c6] y [c7] permiten observar que cuando los efectos de viscosidad no se puedan descartar, la tensión asume la forma de una magnitud tensorial, ya que sus componentes pueden calcularse a partir de nueve componentes escalares dados por una matriz que representa a un tensor de orden 2 1:
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
→
zzyzxzyzyyxyxzxyxx
Sστττστττσ
[c8]
Observe que de acuerdo a las leyes de paridad [b2], el tensor resulta simétrico respecto de la diagonal principal. 1 Para el análisis tensorial un escalar es un tensor de orden 0 y un vector, un tensor de orden 1.
nlxzmnyzlmxynzmylxnn τττσσσσ 222222 +++++=

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1B Estática Versión preliminar.
29
El tensor simétrico permite que la tensión en un punto y en una orientación dada pueda conocerse solamente con las seis componentes independientes de la tensión en el campo,
],,,,,[ yzxzyxzzyyxxfS τττσσσ=→
. Si el estado de tensión con referencia a una terna ortogonal (x, y, z) para el punto es conocido, el mismo estado de tensión, puede ser representado para una terna ortogonal diferente con el mismo origen , (x’ y’ z’) aunque los números que aparecen en la matriz, cambiarán al girar la terna, la tensión en un punto y en una orientación determinada no cambiarán a pesar de cambiar el sistema de referencia del prisma elemental o rotar la terna respecto al punto O , [Fig. c_2], esto obedece a las leyes de transformación de los tensores simétricos, un ejemplo elemental se da en la Fig. c_3 siguiente:
Fig c_3
En este ejemplo el vector →S está aplicado sobre el plano x,y del sistema ( x, y ,z ) puede ser
representado por la matriz:
0] 400 300[=→S al pasar el sistema a la referencia (x’,y’,z’) obtendremos para el mismo vector:
0] 500 0[=→S los componentes del vector, como vemos varían pero el propio vector dentro del campo no. Vamos a ver ahora una propiedad importante del tensor de tensiones, que demostraremos en el punto [d], y tiene que ver con la invariancia de la suma de la diagonal principal del tensor independientemente del sistema de referencia elegido, e decir: ctezzyyxx =++ ][ σσσ Nosotros podemos calcular el promedio de esta suma
][31
zzyyxx σσσσ ++= [c9]
y llamaremos tensión volumétrica o presión estática del punto a este valor del promedio de las tensiones normales para un punto del campo, previo cambio de signo, es decir:

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1B Estática Versión preliminar.
30
σ−=p [c9a]
entonces aprovechando la invariancia de la diagonal para cualquier matriz que represente la tensión en un punto, podemos representar el tensor de tensiones [c8] como:
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−
−=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
→
zzyzxzyzyyxyxzxyxx
pp
p
zzyzxzyzyyxyxzxyxx
S'''''''''
000000
τττττττττ
στττστττσ
[c10]
el vector de tensión, queda representado por dos matrices, la primera característica de la presión [compresión isotrópica] para todas las direcciones posibles del plano A, referenciado a la terna de origen O, y la segunda matriz, que representa la diferencia por tensiones viscosas a ser aplicadas cuando justamente la viscosidad no sea despreciable. Esta matriz de diferencias viscosas tiene componentes normales y tangenciales, puede parecer algo extraño que aparezcan componentes normales en una matriz de tensiones viscosas, pero esto debe ser interpretado como un complemento, por ejemplo: xxxxp στ =+− ' , etc. Si el fluido se considera de viscosidad muy baja o tratamos con un fluido ideal, la segunda matriz, en la expresión [c10] puede anularse, quedándonos la presión uniforme isotrópica , por supuesto lo mismo sucede si el fluido, aunque sea real, está en reposo o en un campo con aceleración uniforme. Dentro de las condiciones de presión y temperatura usuales de los fluidos típicos de ingeniería digamos de viscosidades inferiores a 1Cp, [centipoise], la presión estática puede considerarse en primera aproximación, igual a la presión hidrostática si se trata de un fluido incompresible o a la presión termodinámica1, si se trata de un fluido compresible como un gas, o sea en estos casos podemos prescindir de la segunda matriz, sin cometer un gran error en los cálculos.
Fig. c_4
La presión estática de un fluido en movimiento, puede medirse en un punto A del campo, con un dispositivo denominado piezómetro estático, consiste en un tubo delgado de vidrio, de diámetro pequeño pero mayor a un capilar, abierto en un extremo al fluido y en el otro a la atmósfera, colocado en un punto A del campo en movimiento, la columna del fluido que circula se eleva a una altura h desde A, lo que permite calcular la presión estática absoluta en este punto como: 1 La presión termodinámica está ligada a la densidad y a la temperatura a través de la ecuación de estado para un gas.

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1B Estática Versión preliminar.
31
ghatpp ρ+=
d.- Invariantes del Tensor de Tensión. Vamos a investigar por último la demostración de la ecuación [c9], referida a las diversas propiedades que presenta el tensor de tensiones [c8]. Para ello, partimos de la ecuación [c6] que nos daba la expresión de la componente normal de la tensión
en el punto, para el plano genérico A cuya dirección normal es →n y que repetimos aquí:
nlxzmnyzlmxynzmylxnn τττσσσσ 222222 +++++= [c6]
Consideremos ahora, que sobre la misma recta de acción de nnσ , o sea en la dirección de la normal al plano, definimos un segmento r , cuyo cuadrado es inversamente proporcional al módulo de la tensión
nnσ es decir este segmento siendo c una constante arbitraria, cumplirá con:
nn
czyxrσ
=++= 2222 [d1]
La situación se ha representado en la Fig. d_1, con el paso al límite, el plano A y su punto R, coinciden
con el origen O , el plano A se ha minimizado al punto O, pero la dirección →n sigue definiendo la
orientación del plano diferencial original, cuyo “fantasma” está representado por la línea de puntos. si definimos segmentos x, y, z, como las proyecciones de r, surge que:
rznzrn
rymyrm
rxlxrl
=→=
=→=
=→=
[d2]
Reemplazando los valores [d1] y[d2] en la [c6]. Obtenemos:
Fig. d_1

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1B Estática Versión preliminar.
32
xzxzyzyzxyxyzzyyxxc τττσσσ 222222 +++++= [d3]
Esta es la ecuación de una superficie de segundo grado en el espacio a veces denominada cuádrica de Cauchy, cuyo centro está en el origen de coordenadas de la partícula bajo estudio, los ejes de simetría de esta superficie, son aquellos donde los términos en dos variables se anulan, los planos que contienen a los ejes de simetría se denominan planos principales, y los ejes , ejes principales. Así resulta que la cuádrica de Cauchy , puede considerarse un elipsoide rotado en el espacio, que a veces cuando se lo refiere y se lo observa desde la nueva terna (x’,y’,z’), se lo denomina elipsoide de Lamé.
Fig. d_2
La superficie de la cuádrica, representa el lugar geométrico donde se apoya el vector de tensión →S ,
representado analíticamente por el tensor [c8], para los distintos planos A. De entre todas las ternas de referencia arbitrarias (x, y, z), posibles para la partícula en un punto del campo, hay una en particular (x’,y’,z’), que es la que coincide con los ejes principales, que permite definir las componentes del tensor para la cual las componentes 0=ijτ , es decir todos los estados de esfuerzos
de →S , para los distintos planos, también pueden obtenerse a partir de las tensiones principales, esto
equivale a tomar como ejes de referencia los ejes principales con lo cual podríamos escribir:
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
→
300020001
σσ
σ
στττστττσ
zzyzxzyzyyxyxzxyxx
S [d4]
Los valores ,3,2,1 σσσ son las tensiones principales y corresponden a los puntos donde el elipsoide
intersecta los ejes principales, aquí no debe confundirse un concepto, el vector →S , no es la suma
vectorial de ,3,2,1 σσσ sino que estas tensiones definen el elipsoide respecto a los nuevos ejes rotados,
donde el extremo del vector →S , es un punto de la superficie de este elipsoide, el vector
→S es fijo en el
espacio para un set definido de tensiones, pero puede observarse desde la terna genérica (x, y, z) o desde la terna (x’,y’,z’) .
INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1B Estática Versión preliminar.
33
En resumen cuando los componentes 0=ijτ , éstos se pueden anular en la expresión [c6] y [c7], significa que se ha elegido para el punto un sistema de coordenadas rotado particular, que se denominan ejes principales, en este caso las expresión es [c6] y [c7] pueden escribirse:
232221 nmlnn σσσσ ++= [d5]
]232221[223222221 nmlnmlss σσσσσστ ++−++= [d6]
y la ecuación del elipsoide de Lamé que es la cuádrica referida a los ejes principales quedará a partir de la [d3]:
2'32'22'1 zyxc σσσ ++= [d7]
Habiendo estudiado el tema de las tensiones principales estamos ahora en condiciones de buscar los invariantes del tensor. Primero recordamos las expresiones [c1],[c3],[c3] ya obtenidas que representan las componentes del
vector de tensión →S para el sistema (x, y, z) del punto O del campo en estudio, y que repetimos aquí:
nxzmxylxxSx ττσ ++= nyzmyylyxSy τστ ++= nzzmzylzxSz σττ ++=
Cuando el sistema de referencia es rotado en la orientación de los ejes principales (x’, y’, z’), las componentes quedan expresadas para este sistema en función de las tensiones principales, ya que en este caso, las 0=ijτ , y las anteriores, quedan:
nzSmySlxS
3'2'1'
σσσ
===
Consideremos ahora que estando referidos para el punto estudiado a la terna básica (x, y, z) ; queremos
hallar la tensión para una orientación particular en la que la normal al plano →n , coincide con uno de los
ejes principales, o sea este es el caso, nnS σ≡→
y 0=ssτ ya que el plano elegido será paralelo a un plano principal, y no contendrá tensiones tangenciales, indistintamente, puede ser:
3 ó 2 , 1 σσσσσσ === nnnnnn , en la Fig. d_3 hemos considerado 2σσ =nn y 'yn =→
.

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1B Estática Versión preliminar.
34
Fig. d_3
Entonces para el sistema (x, y, z), las componentes de tensión podrán ser expresadas indistintamente por cualquiera de los dos sistemas siguientes:
nnnzSmnnySlnnxS
σσσ
===
nxzmxylxxSx ττσ ++= nyzmyylyxSy τστ ++= [d8] nzzmzylzxSz σττ ++=
combinando ambos resultados :
0 ][ =++− nxzmxylnnxx ττσσ 0 ][ =+−+ nyzmnnyylyx τσστ [d8 b] 0][ =−++ nnnzzmyzlzx σσττ
con lo que resulta un sistema de ecuaciones respecto a las incógnitas: l, m, n , que determinan la dirección del eje principal elegido respecto del sistema inicial: (x, y, z). Como vemos es un sistema de ecuaciones homogéneo, que al mismo tiempo deberá determinar valores no simultáneamente nulos de l, m, n; porque al ser cosenos directores, también debe cumplirse que:
1222 =++ nml Para que el sistema de ecuaciones homogéneas [d8 b] tenga solución que sea diferente de cero, es necesario que el determinante del sistema sea igual a cero.

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1B Estática Versión preliminar.
35
0 ][
][ ][
=−
−−
nnzzzy τzxyzτnnyyyxxzxynnxx
σστσστ
ττσσ [d9]
Esto se consigue eligiendo adecuadamente las valores de nnσ , para lo cual desarrollamos el determinante [d9], que ordenado convenientemente, nos da la ecuación de tercer grado siguiente:
0]2222[ ]222[][23
=−−−+−−−−−+++++−
yyxzxxyzzzxyyzxzxyzzyyxxxzyxxyzzxxzzyyyyxxnnzzyyxxnnnn
στστσττττσσστττσσσσσσσσσσσσ
[d10]
como los contenidos dentro de los corchetes son las componentes de las tensiones en el punto elegido O, y son datos del problema , pueden agruparse como constantes, con los cual nos queda:
032123 =−+− IInnInnnn σσσ [d10b] siendo:
][1 zzyyxxI σσσ ++=
]222[2 xzyxxyzzxxzzyyyyxxI τττσσσσσσ −−−++=
]2222[3 yyxzxxyzzzxyyzxzxyzzyyxxI στστσττττσσσ −−−+= Resulta evidente que las tres raíces de [d10] son las tensiones principales 3,2,1 σσσ ya que la hipótesis de partida para nnσ , fue tomar su dirección coincidente con una dirección principal, o normal a un plano principal. Como las direcciones principales y las tensiones principales no dependen del sistema de coordenadas (x, y, z) inicial elegido para el punto O en estudio, sino que se obtienen las mismas direcciones y tensiones principales para cualquier set de componentes que representen al punto (en rigor cualquier tensor de tensiones que represente al punto), entonces concluimos que las cantidades I1, I2 ,I3 formadas por las componentes del tensor, deberán ser invariantes. Estos coeficientes se denominan Invariantes del Tensor de Tensión, y nos importa en particular el primero, que hemos utilizado para definir la presión termodinámica de un fluido viscoso en movimiento en el párrafo, Notas Complementarias c. []

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 1B Estática Versión preliminar.
36
Tabla 1. Momentos de Área

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco
MOD 2 Modelos Cinemáticos en Análisis de Flujos Versión preliminar
1
MODELOS CINEMÁTICOS EN ANÁLISIS DE FLUJOS 2.1 Conceptos Introductorios. a.- Admitimos cono conocida la definición y propiedades de Campo Escalar. b.- Análogamente para la definición y propiedades del Campo Vectorial concepto que aplicaremos especialmente en referencia a campos vectoriales de velocidades y aceleraciones en el cuerpo del fluido. c.- Líneas notables para la descripción del campo de Flujo. c1.- Líneas de trayectoria. Se definen como el lugar geométrico de los puntos recorridos por una partícula material del fluido que se desplaza en la región en estudio que se denomina campo de flujo. La posición instantánea de una partícula
fluida en un espacio 3D es una función del tiempo del tipo )(trr→→
= por ejemplo: →→→→
−++= ktjtsenitr )48(232cos3 cuando t = 0 queda definida la posición inicial de la partícula, en este caso (3 , 0 ,- 4). Al hablar del movimiento de una partícula nos estamos refiriendo a un volumen de fluido pequeño, pero no diferencial de acuerdo a las definiciones de mesovolumen dadas en el Mod.1, para no contradecir la hipótesis del continuo, también hay que notar que las partículas de fluido forman un continuo y no hay vacíos entre ellas, el fluido se mueve como un conjunto en el cual identificamos una partícula y la seguimos en el tiempo, para definir su línea de trayectoria, en general la partícula se deformará y rotará parcialmente en el curso de su evolución. c2.-Líneas de traza o Filetes Fluidos. Se define como el lugar geométrico de los segmentos que surgen al unir el rosario de partículas que han pasado en un intervalo Δt por un mismo punto ijP (no material) del espacio 3D en el cual está definido el campo de flujo. Un ejemplo simple sería el humo de un cigarrillo, en el cual vemos múltiples líneas de traza que parten de diversos puntos de combustión al mismo tiempo, formando un tubo de filetes. En el intervalo Δt la traza es única, pero en general para otro intervalo sucesivo de la misma duración la línea de traza seguirá otro patrón distinto salvo que el flujo sea permanente. Cuando se hacen experimentos en túneles de viento, es habitual usar generadores puntuales de humo, que definen el movimiento del flujo en torno a objetos, estos patrones que se forman son también líneas de traza o filetes. c3.- Líneas de corriente. Las líneas de corriente se definen matemáticamente y son difíciles de visualizar físicamente, salvo que el campo sea permanente, en cuyo caso coinciden con las líneas de trayectoria y las líneas de traza. Para cada punto no material del campo fluido (x, y, z) definido matemáticamente, existirá una velocidad asignada que en general será diferente en cada instante. Si en un instante dado, se trazan líneas correspondientes a funciones continuas y derivables con continuidad f = f (x, y, z), de modo tal que resulten tangentes en cada punto a los vectores velocidad, ellas se denominan líneas de corriente del campo para el instante t .

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco
MOD 2 Modelos Cinemáticos en Análisis de Flujos Versión preliminar
2
Esto lo podríamos expresar matemáticamente como:
0=×→→
dsV [2.1.1]
siendo →ds un segmento de la línea de corriente, ya que por definición la velocidad es tangente al segmento
→ds de la función continua en cada punto. Dado un campo de velocidades, una línea de corriente se define entonces como la envolvente continua de las direcciones de los vectores de velocidad en cada punto en un instante t .
Hay un caso usual particular en el cual cada punto repetirá sus parámetros (velocidad, presión absoluta, densidad, temperatura etc. ) al transcurrir el tiempo, en este caso las líneas de corriente coinciden con las de trayectoria y las de traza, y no cambian en el tiempo en este caso el campo de velocidades se denomina permanente. Las líneas de corriente no deben confundirse con las líneas de trayectoria, que es la línea que sigue cada punto material o partícula fluida. Estas líneas en general no coincidirán con ninguna línea de corriente del intervalo Δt salvo que el flujo sea permanente. Si el flujo es permanente, líneas de corriente y trayectoria coinciden, y las partículas no puede atravesar las líneas de corriente, porque si no en el punto de cruce habría dos tangentes diferentes para la misma partícula, o sea las líneas de corriente no se cruzan.
En un instante t, la partícula se mueve en la dirección de la línea de corriente, su desplazamiento →ds tiene
las componentes : dx, dy, dz .que a su vez tienen la dirección de las componentes del vector velocidad:
→→→→++= kdzjdyidxds
∪∪∪→
⋅+⋅+⋅= kVjViVV zyx Si se desarrolla la operación indicada en [2.1.1] se obtendrán las expresiones;
[ ] 0
[ ] 0
[ ] 0
Vy dz Vz dy i
Vz dx Vx dz j
Vy dx Vx dy k
∪
∪
∪
− =
− =
− =
Se cumplirán entonces las relaciones::
VzVy
dzdy
VxVy
dxdy
Vzdz
Vydy
Vxdx
==→== )(,)( [2.1.2]
Las [2.1.2] son dos ecuaciones diferenciales simultáneas e independientes, cualquier curva en el espacio que las satisfaga, provendrá de una función continua y derivable con continuidad y es una línea corriente que puede ser transitada por una partícula fluida del campo en alguna circunstancia.

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco
MOD 2 Modelos Cinemáticos en Análisis de Flujos Versión preliminar
3
En el caso de flujo permanente el conjunto de líneas de corriente forma un gran tubo de corriente con los límites por donde el fluido pasa, por la ley de conservación de la materia es lógico concluir que la cantidad de fluido por unidad de tiempo atravesando cada sección genérica del tubo de corriente permanecerá constante y que si la sección disminuye la velocidad debe aumentar para mantener este valor de caudal másico constante. 2.2.- Técnicas para describir los movimientos y comportamientos de los flujos de fluidos. En mecánica clásica el movimiento de un sistema rígido de agregado de partículas puede estudiarse básicamente siguiendo la trayectoria de un solo punto particular del cuerpo llamado centro de masa, el centro de masa concentra la masa del sistema la cual se mantiene constante para el sistema. El sistema se mueve respecto a una terna de referencia inercial (por ejemplo una automóvil moviéndose en la carretera observado desde una referencia fija). En fluidos una metodología similar sería, definir una terna inercial y seguir cada partícula que presuponemos de masa fija, la partícula es del tamaño de un mesovolumen del continuo de fluido que en general consideraremos variable y deformable, es decir este mesovolumen puede desplazarse, expandirse o contraerse y estar sometido a distorsión, rotar parcialmente, pero manteniendo su masa y su CM constante con el transcurso del tiempo. Los mesovolúmenes están rodeados de otros iguales sin espacios vacíos, entre ellos, forman por lo indicado una continuidad, el movimiento, conlleva apretujones, empujones, y rozamiento con sus vecinos. En principio consideramos que estos mesovolúmenes como cuerpos con volumen → valor pequeño pero no cero, seguirán siendo pequeños y del mismo orden de magnitud que en condiciones estáticas. Si imaginamos una de estas partículas pintada de rojo y seguimos sus movimientos dentro de conjunto del flujo, desde una referencia fija o inercial, estamos usando un procedimiento denominado descripción Langrangiana del flujo. Otro procedimiento usual es definir todas las propiedades del campo de flujo en cada punto matemático no material del mismo o sea en una matriz de puntos fijos del campo fluido, también referidas a una terna inercial, las partículas que en forma continua pasan por esos puntos y en tiempos definidos, toman las propiedades asignadas por el campo en cada instante y en cada uno de los puntos. Se requiere disponer de las propiedades físicas y termodinámicas de todos los puntos de una región en estudio a medida que transcurre el tiempo, a menudo dadas por medio de funciones continuas del espacio y tiempo, a este procedimiento se lo denomina descripción Euleriana del flujo. Comenzaremos por este último, y luego veremos como se vinculan ambos criterios. 2.2.1.- Criterio de Euler: los puntos del campo fluido se definen desde un sistema de coordenadas genérico inercial, los puntos definen una trama matemática o campo fijo, seria como armar una matriz de alambre para la zona en estudio, donde poseemos para cada intersección, los datos de todos los parámetros o propiedades físicas y termodinámicas para cada punto e instante, (Funciones del campo). O sea el campo puede estar definido por un set de valores de las propiedades para una matriz de puntos y sería una descripción discreta, cuanto mas densa es la trama de la malla, mejor descripción del campo tendremos.
INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco
MOD 2 Modelos Cinemáticos en Análisis de Flujos Versión preliminar
4
Para los puntos intermedios dentro del campo (que no se correspondan con los vértices de la malla), podremos asociar valores con una dependencia lineal con sus vecinos, y así todo el continuo del campo quedará definido. Por ejemplo, puede determinarse por medición o por descripción matemática el campo de velocidades para cada punto y para cada instante del tiempo, es decir el campo de velocidades queda definido por:
),,,( tzyxVV→→
= , donde las cuatro coordenadas (coordenadas de un suceso), corresponden a las posiciones de los puntos genéricos del espacio definido por el sistema de coordenadas, y t como la coordenada temporal, por ejemplo a través de una función explícita:
→→→→→
−+++== ktxjtsenyitzyxtzyxVV 2)48(22)23(),,,( [m/seg] Así, una vez definido el punto de interés, y el instante del tiempo, conocemos la velocidad de la partícula que pase por ese punto no material en ese instante. Luego pasamos a otro punto de interés. Como se ve la velocidad puede cambiar en magnitud y dirección en el mismo punto ya que también depende del tiempo. El campo de velocidades del ejemplo anterior podría ser permanente, en este caso los valores de velocidad en cada punto permanecerían constantes con el transcurso del tiempo, y no dependerán del tiempo en este caso un ejemplo sería:
→→→→→−+++== kxjyizyxtzyxVV )48(2)23(),,,( [m/seg]
Las propiedades que se definan para el campo, pueden también ser escalares, por ejemplo podríamos tener definido el campo de temperaturas ),,,( tzyxTT = , por ejemplo:
txtyxT 2423 −+= [ºC] También vemos en este ejemplo, que para cualquier punto del campo y cualquier instante la temperatura quedará definida, y que en general la temperatura no será la misma aun para el mismo punto en dos momentos diferentes. Sin embargo, si la función que define la propiedad en el campo, no depende del tiempo, cada punto mantendrá la misma temperatura en dos momentos diferentes, por ejemplo para la función:
2423 xyxT −+= [ºC] Un campo permanente y uniforme deberá venir dado por un funcional que sea independiente de la posición y del tiempo, y que es válido para todo punto es decir una constante, por ejemplo: V= 43 [m/seg] T= 15 [ºC] Observe que para cada funcional hemos indicado también las unidades correspondientes que vinculan la función matemática con el concepto físico, en los ejemplos, de velocidad y temperatura.

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco
MOD 2 Modelos Cinemáticos en Análisis de Flujos Versión preliminar
5
2.2.2.- Criterio de Lagrange: Obedece como ya dijimos, a la definición del movimiento y seguimiento de una partícula n de interés del campo de flujo, aplicando la Teoría de mecánica de partículas. La terna de referencia inercial es la misma que en el caso anterior; y la línea descrita por el centro de masa de la partícula elegida es como vimos una línea de trayectoria, Una vez conocida la línea de trayectoria, de la partícula para un entorno de tiempo, podemos calcular por ejemplo la velocidad y posición en un instante dado del intervalo. Para una partícula n , puede
describirse a través de la ecuación vectorial: ( )r r tn n→ →= , a partir de la cual, puede calcularse su velocidad
vectorial )(tnVnV→→
= la que da lugar a tres ecuaciones escalares de sus componentes.
)(tnunu = , )(tnvnv = , )(tnwnw = .
Como la posición de la partícula n varía con el tiempo, la función vectorial de posición ( )r r tn n→ →
= se descompone también en tres ecuaciones escalares: x = x( t), y = y( t), z = z ( t), por tanto, para cada partícula, la posición y la velocidad variarán solamente con el tiempo, es decir son funciones del tiempo. En resumen, la descripción Langrangiana define lo que se denomina la línea de trayectoria de cada partícula al transcurrir el tiempo. Vemos entonces que la línea de trayectoria posee un sentido físico mientras que las líneas de corriente son entidades matemáticas difíciles de individualizar por métodos simples, que en general cambian de un instante al siguiente, sin embargo como ya dijimos, para flujos permanentes líneas de corriente y trayectoria coinciden. 2..3.- Siguiendo una partícula según Lagrange:
Ubicar una partícula del campo y seguirla implica conocer primero su ecuación de posición para el intervalo de tiempo de seguimiento a partir de un punto de inicio P en t hasta Q en ( t + Δt) , (Fig 2.3_1) o sea:
ktzjtyitxtr )()()()( ++=→
es decir para todo instante a partir de t = 0, hemos tomado un vector posición desde el origen de coordenadas inercial, hasta la posición instantánea x, y, z., de la partícula, hemos supuesto que la partícula pasó por el punto P en el instante t = 0, siendo la velocidad de su centro de masa, tangente a la línea de corriente instantánea en t =0 , la línea de trayectoria dibujada es la que ha seguido la partícula bajo estudio , esta línea de trayectoria puede ser otra para la siguiente partícula que pase por P, (si el flujo es no-permanente) y también puede no variar con el tiempo (si el flujo es permanente) ; Fig. 2.3_1

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco
MOD 2 Modelos Cinemáticos en Análisis de Flujos Versión preliminar
6
La velocidad instantánea para la partícula “n”_enésima en el punto P , puede ser obtenida conociendo las componentes de su velocidad a partir de:
∪
→Δ
→→
=++=++=ΔΔ
== TsvkzVjyVixVkdtdzj
dtdyi
dtdx
tr
dtrd
nVt
)()()(lim0
2 2 2d r dsV vn Vy VzVx sdt dt
→→
= + + = = =
donde ds es un tramo diferencial de la curva en la dirección de Δr. En general entonces, podemos escribir:
∪→
→→→
→⋅==== Tv
dsrdV
dtds
dsrd
dtrdV
siendo T el versor tangente, a partir de este resultado, podemos calcular la aceleración:
)(2
)(
dsTdvTtaa
vdsTdvTta
dtds
dsTdvTta
dtTdvT
dtdvTv
dtd
dtVda
∪∪
∪∪
∪∪
∪∪∪
→→
⋅+⋅=
⇒⋅⋅+⋅=+⋅=⋅+⋅=⋅==
Ahora hacemos una pequeña construcción auxiliar, tomamos 1=∗→→TT (el producto escalar de dos vectores
es : θcos.. BA ). Ahora derivamos el resultado anterior, respecto de s miembro a miembro por lo cual obtenemos :
→=∗→=∗=∗+∗==∗
∪∪
∪∪
∪∪∪
∪∪∪
0020)(dsTdT
dsTdT
dsTdTT
dsTdTT
dsd
o sea que ∪T es perpendicular a dsTd /
∪, por tanto si llamamos a
∪∪= NdsTd κ/ =(1/R)
∪N llamando a κ
curvatura y R: radio de curvatura, donde también R = 1 / κ ., la curvatura matemática es inversamente proporcional al radio de curvatura, así, un punto tendrá curvatura infinita y una recta, curvatura cero. Finalmente podemos escribir:
∪∪∪∪
⋅+⋅=⋅+⋅= NRvTtaNaTaa NT )2( [ 2.3.1]
Así cada punto de la curva de trayectoria tiene asignado un versor T (tangente), un versor N (normal) y un
versor B (versor Binormal ). Siendo ∪∪∪
×= NTB . El plano definido por →→NB y se denomina plano osculador
de la curva, y es un plano normal a ella en cada punto. Es interesante tener en cuenta aquí, que como de acuerdo a la definición matemática de curvatura esta tiene signo positivo cuando está dirigida hacia el centro instantáneo de la trayectoria, entonces, la componente de aceleración normal obtenida en el desarrollo de la ecuación [2.3.1], será la centrípeta.

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco
MOD 2 Modelos Cinemáticos en Análisis de Flujos Versión preliminar
7
Ejemplo 1: Dada la curva de trayectoria en el espacio:
ktjtsenittr )48( 23 2cos3)( −++=→
hallar: a- la velocidad como función del tiempo.
kjtitsendt
trdV 82cos626)(++−==
→
b.- el versor tangente a la trayectoria de la partícula en cada instante. El vector velocidad está expresado como:
→→= TvtV )(
por tanto:
tdrddtrd
vVT
//
==
→→
hallamos el módulo
kjtitsenT
ttsen
ttsendtdrv
8,0 2cos6,0 26,0
10100
64)2cos2(36
8)2cos6()26(
22
222
++−=
==
++=
++−==
∪
c.- la aceleración tangencial.
→→
= Tatat .
0==dtdvat (ya que v es constante igual a 10 en este ejemplo)
d.- la aceleración normal.
→→→
== NvNRv
na ..2.2
κ
como:
j 2253i 2cos
253
101).j 2
56i 2cos
56(1 1.
tsent
tsentvdt
Td
dtdsdt
Tddsdt
dtTd
dsTdN
−−=
=−−=====
→→→→→
κ

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco
MOD 2 Modelos Cinemáticos en Análisis de Flujos Versión preliminar
8
finalmente:
j 212i 2cos12]j 2253i 2cos
253[1002 tsenttsentNvna −−==−−==
→→κ
e- la curvatura en cada punto de la trayectoria: y la curvatura será el módulo:
253)225/3()2cos25/3( 22 =−+−==
→
tsentdsTdx
resultado del cual obtenemos que el radio de curvatura será R =1/χ = 25/3, observamos que la curvatura e constante para cada punto de la trayectoria. f- el versor normal a la curva para cada punto de la trayectoria:
⇒−−===
→→
) 2253 2cos
253( jtsenit
RNN
dsTd κ
como κ =3/25 →
) 2 2cos( jtsenitN −−=→
g -expresión general de la aceleración:
j 212i 2cos12]j 212i 2cos12[0 tsenttsentNnaTtaa −−=−−+=+=→→→
2.4.- Variación Incremental Euleriana Una propiedad cualquiera escalar o vectorial, del campo de flujo, al cambiar de un punto no-material del campo a otro próximo, por ejemplo la velocidad, definirá un cambio a través de una variación:
dtt
Vdzz
Vdyy
VdxxVVd )()()()(
∂∂
+∂∂
+∂∂
+∂∂
=
→→→→→
[2.4.1]
Como la velocidad en el campo está definida como: ),,,( tzyxVV→→
= el incremental [2.4.1] puede obtenerse aplicando a esta función la regla de la cadena. Desde el punto de vista físico, cada término del segundo miembro de la [2.4.1], contiene un producto de la razón de cambio de la propiedad según la dirección correspondiente, multiplicado por la métrica o distancia en dicha dirección, el último término corresponde a la razón de cambio por unidad de tiempo de la velocidad en el punto al transcurrir el tiempo dt, o sea una razón de cambio en la dirección del tiempo, por el tiempo transcurrido, a su vez por tratarse de la velocidad es una ecuación vectorial, por lo cual la ecuación [2.4.1], dará lugar a tres ecuaciones escalares. Los tres primeros términos de la ecuación vectorial [2.4.1] representan el cambio de la velocidad debida al cambio de posición, como si el campo fuera permanente o estable en el tiempo, el último término, se refiere al cambio del espacio vectorial de velocidades cuando el tiempo cambia de t a t + Δt. , cuando el campo vectorial sea no permanente, de lo contrario este término se anula en el análisis.

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco
MOD 2 Modelos Cinemáticos en Análisis de Flujos Versión preliminar
9
Esta variación de velocidad no corresponde al seguimiento de una partícula sino al cambio de velocidad entre dos puntos cualquiera no materiales y genéricos del campo, por eso podemos definirla como variación incremental Euleriana, estamos tratando con puntos matemáticos. 2.5.-Aceleración de una partícula fluida. Pensando en el campo matemático de velocidades definido según Euler, [2.4.1], podremos tratar de establecer entonces el campo de aceleraciones derivando la [2.4.1]como:
)()(tV
dtdz
zV
dtdy
yV
dtdx
xV
dtVd
∂∂
+∂∂
+∂∂
+∂∂
=
→→→→→
[2.5.1]
Aquí aparecen dos definiciones de cambio de velocidad con respecto al tiempo, una es tV∂∂
→
, que usaremos
para definir el cambio local del vector velocidad respecto al tiempo en un punto fijo y definido del campo,
y la otra que es la diferencial dtVd→
que usaremos para definir el cambio total del vector velocidad entre dos
puntos próximos del campo. Estaremos tentados de llamar aceleración a estas variaciones de la velocidad respecto al tiempo, ya que ambas tienen unidades de aceleración, sin embargo así presentadas no tienen un sentido físico. La primera mide el cambio (por unidad de tiempo) de las velocidades de dos partículas en general distintas que pasan por el mismo punto con una diferencia Δt , la segunda representa un cambio de velocidad respecto al tiempo, referido a dos puntos diferentes no materiales del campo, no necesariamente conectados por la trayectoria de una partícula real. Ahora bien, las expresiones dx/dt, dy/dt, dz/dt, que aparecen en el segundo miembro de la ecuación [2.5.1], solamente adquieren sentido físico como velocidades o sea
dtdzVzdtdyVydtdxVx / ,/ ,/ === , si es posible realizar estas derivadas, lo que significa que las funciones: x = f(t), y = f(t) y z = f(t), [2.5.2] deben existir, y esto solamente ocurre cuando nos movemos desde el primer punto elegido al segundo a través de una trayectoria. Definida por las ecuaciones [2.5.2] y entre los dos puntos, si bien muy próximos, una partícula ha establecido esta trayectoria real, en esta circunstancia, se admite la existencia de una aceleración física para una partícula, y podemos escribir:
)()(tVV
zVV
yVV
xV
tdVda zyx ∂
∂+
∂∂
+∂∂
+∂∂
==
→→→→→→ [2.5.3]
que por tratarse de una propiedad vectorial, da lugar a tres ecuaciones escalares de aceleración, recordando que cada componente de la velocidad en cada punto depende a su vez de tres coordenadas de posición y del tiempo

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco
MOD 2 Modelos Cinemáticos en Análisis de Flujos Versión preliminar
10
)()(
)()(
)()(
tVzV
zVzV
yVzV
xVz
dtdVz
za
tVyV
zVyV
yVyV
xVy
dtdVy
ya
tVxV
zVxV
yVxV
xVx
dtdVx
xa
zyx
zyx
zyx
∂∂
+∂∂
+∂∂
+∂∂
==
∂∂
+∂∂
+∂∂
+∂∂
==
∂∂
+∂∂
+∂∂
+∂∂
==
[2.5.3b]
La expresión [2.5.3] se denomina derivada total de la velocidad, y Vx, Vy, Vz, representan las componentes de velocidad de una partícula material o un móvil arbitrario en el punto. Si en particular esa trayectoria fue seguida por una partícula del flujo, que recorre desde la posición inicial a la final, podríamos obtener la aceleración de la partícula por el método Langrangiano, para no confundir, expresamos en este caso al operador derivada con mayúsculas:
tDVDa→
→
=
Desde el punto de vista Euleriano, la aceleración de la partícula sería como vimos:
)()(tVV
zVV
yVV
xV
dtVda zyx ∂
∂+
∂∂
+∂∂
+∂∂
==
→→→→→→
Ahora bien, como los valores de velocidad entre el primer punto y el segundo son unívocos para el intervalo Δt en cuestión cuando los recorre una partícula fluida, o cuando nos movemos en el campo ambas aceleraciones deben coincidir, entonces podemos escribir:
)()(tVV
zVV
yVV
xV
tDVDa zyx ∂
∂+
∂∂
+∂∂
+∂∂
==
→→→→→→ [2.5.4]
Que representa la igualdad de los dos procedimientos, el Langrangiano en el primer miembro y el Euleriano en el segundo. La anterior que es una ecuación vectorial de aceleración , puede expresarse en forma de tres ecuaciones escalares:
)()(
)()(
)()(
tVzV
zVzV
yVzV
xVz
dtDVz
za
tVyV
zVyV
yVyV
xVy
dtDVy
ya
tVxV
zVxV
yVxV
xVx
dtDVx
xa
zyx
zyx
zyx
∂∂
+∂∂
+∂∂
+∂∂
==
∂∂
+∂∂
+∂∂
+∂∂
==
∂∂
+∂∂
+∂∂
+∂∂
==
[2.5.4b]
Usamos entonces la expresión D / Dt para distinguir que la conexión entre dos puntos no materiales, es única y la realizó una partícula del flujo. A este operador se lo denomina derivada sustancial o material para indicar que se ha producido un trasporte de sustancia o materia. Para el resultado anterior [2.5.4], vemos que la aceleración de las partículas fluidas en el campo está compuesto de dos partes, el paréntesis largo que representa las variaciones de velocidad de acuerdo al cambio de posición espacial, considerando una foto del campo congelado en t, es decir como si fuese un campo permanente, se la denomina “componente de transporte de la aceleración” o aceleración convectiva.

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco
MOD 2 Modelos Cinemáticos en Análisis de Flujos Versión preliminar
11
Y el término del segundo paréntesis nos define la componente de cambio de velocidad del punto al transcurrir el tiempo debido al cambio del campo vectorial en ese intervalo dtt y se lo denomina “aceleración local”. Una consideración interesante es que para un campo permanente, la componente local de la aceleración se anula, pero las partículas pueden aun tener una gran aceleración convectiva por ejemplo al pasar por un conducto convergente a caudal constante. Aplicando la definición del operador gradiente del Análisis vectorial:
)( kz
jy
ix
grad∂∂
+∂∂
+∂∂
=∇=
la expresión anterior de la aceleración [2.5.4] puede escribirse como:
)()(tVVgradV
DtVDa
∂∂
+∗==
→→→
→→
[2..5.5]
Las expresiones [2.5.4] y [2.5.5] nos permiten expresar el vínculo de la aceleración de las partículas materiales siguiéndolas en sus trayectorias reales (técnica Langrangiana) con la variación de campo de velocidades Euleriano, apoyándonos en el incremental entre puntos matemáticos.
Utilizaremos a →ds para definir la porción de trayectoria seguida por la partícula o envolvente de la
trayectoria entre los puntos, separados infinitesimalmente.
→→→→++= kdzjdyidxds
La partícula siguiente que pase por el punto de referencia inicial donde comenzamos a seguir a la partícula típica, tendrá en general una velocidad diferente en magnitud y dirección (un vector diferente) a la partícula inicial, salvo que el campo sea permanente, y seguirá en general una trayectoria diferente. La expresión [2.5.5] se generaliza para una variable o propiedad genérica N que puede ser escalar o vectorial, es decir pasamos de:
)()(tVVgradV
DtVDa
∂∂
+∗==
→→→
→→
a
)()(tNNgradV
DtDN
∂∂
+∗=→
ya dijimos que si N puede ser una magnitud vectorial, por ejemplo velocidad, entonces la ecuación tiene tres componentes escalares, por otra parte, si N es una magnitud escalar, por ejemplo Temperatura, la ecuación compacta dará lugar o representa a una sola ecuación escalar, y quedará
)()(tN
zNVz
yNVy
xNVx
DtDN
∂∂
+∂∂
+∂∂
+∂∂
=

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco
MOD 2 Modelos Cinemáticos en Análisis de Flujos Versión preliminar
12
Ejemplo 1
a.- Supongamos que medimos la temperatura sobre la superficie de un río desde un puente, en un punto fijo A respecto de una terna inercial, bajando un termómetro sujetado a una boya con un cordel, estamos en este caso midiendo la temperatura en un punto fijo respecto a la terna inercial, en este caso la medición
tT∂∂ , representa la razón de cambio local de la temperatura con el tiempo manteniendo constante (x, y, z).es
la derivada local respecto al tiempo. b.- Ahora soltamos el cordel y dejamos que la boya con el termómetro deriven libremente con la corriente, y medimos la temperatura en otro punto B corriente abajo, ahora la temperatura dependerá de la velocidad local de la corriente, que lleva la boya a B más la razón de variación con el tiempo de la temperatura en todo el campo el entorno de los puntos A y B (por ejemplo si se va haciendo de noche y el agua de todo el rio se va enfriando) se denomina derivada sustancial:
)()(tT
zTVz
yTVy
xTVx
DtDT
∂∂
+∂∂
+∂∂
+∂∂
=
En este caso Vx, Vy, Vz, son las componentes de la velocidad de la corriente dado por el campo de velocidades en B. c.- Como tercer experimento, remolcamos la sonda con una lancha hasta un punto C , este punto puede estar ya sea corriente abajo o corriente arriba, cuando tomemos la medición y calculemos su razón de variación respecto al punto A habremos calculado la derivada total de la temperatura respecto al tiempo entre C y A.
( ) ( )d V T T T TVx Vy Vzdt x y z t
→
∂ ∂ ∂ ∂= + + +
∂ ∂ ∂ ∂
Observe el cambio sutil de nomenclatura, usamos d/dt en lugar de D/Dt, en este caso Vx, Vy, Vz, son las componentes de la velocidad de la lancha en C. El ejemplo permite entender el significado físico de estas tres derivadas, recuerde que tT ∂∂ / es la derivada o razón de cambio para un punto fijo del espacio, DT/Dt es la derivada o razón de cambio para un observador que sigue a una partícula del fluido que originalmente en t pasó por A y en t+Δt pasó por B, [el termómetro sobre la boya a la deriva, seguirá midiendo sobre la misma región de fluido], finalmente dT/dt, mide la razón de cambio cuando el termómetro se trasladó siguiendo una trayectoria diferente a la de corriente libre a partir de A. Para el ejemplo elegido, Vz y
zT∂∂ son nulos ya que el problema se plantea en un plano, pero el
termómetro podría estar sobre un minisubmarino de juguete, y medir las componentes también en profundidad.

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco
MOD 2 Modelos Cinemáticos en Análisis de Flujos Versión preliminar
13
2.6.- Cambio de Referencia Inercial.
Ejemplo 1 Problema propuesto : Un remero hace avanzar un bote en contra de la corriente de un río. En la popa del bote lleva una botella de whisky medio vacía. Cuando pasa justo por debajo de un puente la botella cae al agua sin que el remero se de cuenta. El remero avanza 20 minutos más, al cabo de lo cual observa que la botella se ha caído. Da media vuelta y vuelve a buscarla remando siempre a velocidad constante. Finalmente encuentra la botella a 1 km corriente abajo del puente. Calcular la velocidad de la corriente del río. Trate de resolver este problema; medite acerca de los cambios de referencia inercial para la resolución, esto no tiene que ver con el criterio de Euler o Lagrange. Ambos se emplean desde o a partir de una terna fija o inercial, ya sea para observar puntos fijos del campo o para seguir una partícula en su trayectoria. El cambio de posición de la referencia inercial o la elección de la terna inercial, se usa para simplificar la resolución de problemas. Fig.2.6_1 Rta: la velocidad de la corriente es 1.5 Km/h. Este interesante ejemplo que permite jugar con la complejidad y con la simplicidad, dependiendo de cómo se tome la referencia, está tomado del magnifico libro: Biografía de la Física de George Gamow. Ejemplo 2:
Fig.2.6_2 Examinemos ahora un flujo creado por una embarcación en movimiento sobre una masa de agua, como se observa en la Fig. 2.6_2 izquierda, el barco avanza sobre el agua no perturbada a velocidad V0 con respecto a la referencia fija x,y.
Se ve que, para esta forma de tomar la referencia, el flujo en el punto (x0, y0) es no permanente, ya que la velocidad en el mismo será cero, hasta que el punto sea alcanzado por la estela de la proa y la medición de velocidad según z, sufrirá entonces variaciones complejas por largo tiempo hasta volver a cero, cuando el

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco
MOD 2 Modelos Cinemáticos en Análisis de Flujos Versión preliminar
14
barco esté ya lejos a la izquierda. O sea, estamos en presencia de flujo no-permanente en el campo vectorial de velocidades referida a la posición de los puntos x,y de la superficie. Ahora consideremos un sistema inercial de coordenadas pero tomadas sobre el barco (η,ξ),esto es posible si el barco se mueve con movimiento rectilíneo y uniforme, podemos entonces considerar en este caso al barco quieto y el agua moviéndose hacia la derecha a una velocidad constante -V0 . Si nosotros como observadores nos colocamos en esta terna, y subimos al barco, ahora el campo de velocidades nos resulta permanente y las velocidades medidas para el punto (ηo,ξo), son ctes, para todas las partículas fluidas que pasan por dicho punto fijo en relación al barco. Hemos transformado un flujo no permanente en permanente. Es lo que ocurre en los túneles de viento o en los túneles hidrodinámicos, el objeto en estudio es fijo y se mueve la corriente en torno a él con velocidad igual y de signo opuesto a la que la corriente posee en la realidad, pero esto permite cambiando la posición del sistema de referencia inercial, transformar un flujo típicamente no permanente en permanente, es un buen truco para facilitar el estudio de las corrientes sobre objetos Observe que para ambas referencias el criterio es Euleriano, ya que se toma un punto fijo del campo respecto de la referencia y se observan las velocidades de las partículas que pasan por ese punto, luego otro y otro, hasta tener una representación clara del comportamiento del flujo en torno al barco; recuerde entonces que un adecuado cambio de referencia permite transformar el campo del flujo, de no permanente en permanente. 2.7.- Propiedades Extensivas e Intensivas de la materia:
Definimos como Sistema a un conjunto de partículas de un campo fluido, es como una bolsa imaginaria que contiene una cantidad de partículas fluidas de masa constante pero el volumen puede variar, la bolsa puede cambiar de forma, volumen, rotar y trasladarse, pero no se pueden incorporar ni perder partículas, es decir la masa del sistema permanece constante. Entonces para un sistema, propiedades Extensivas son aquellas que dependen de la cantidad de materia presente en el sistema elegido. Por ejemplo: peso, cantidad de movimiento, masa, energía. Las propiedades Intensivas por el contrario, no dependen de la cantidad de masa presente. Por ejemplo: presión, temperatura, etc. Las propiedades Extensivas pueden transformarse en Intensivas, dividiendo por la cantidad de masa presente en un sistema por ejemplo:
v = v/m Volumen por unidad de masa, o volumen específico. e = E/m Energía por unidad de masa, etc.
Las propiedades extensivas así definidas en general se denominan específicas.

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco
MOD 2 Modelos Cinemáticos en Análisis de Flujos Versión preliminar
15
Notas Complementarias_ Análisis de Flujos. Problemas resueltos.1 Ejemplo 1: A partir de conocer las componentes escalares de velocidad de un flujo bidimensional siguientes:
0==−=
VzAyVy
AxVx
Establecer las ecuaciones de las líneas de corriente del flujo. Respuesta: 1° Observamos que el flujo es permanente ya que no aparece la variable tiempo en las ecuaciones escalares. 2° Por definición de línea de corriente para flujo bidimensional:
xdx
ydy
xy
AxAy
VxVy
dxdy
−=→−=−
== )( integrando queda:
ln y = - ln x +C que se puede escribir:
ln y = - lnx + ln k por tanto ln y + ln x = ln k ya que siempre se podrá establecer una constante como:
C = ln k Por lo tanto queda finalmente: x.y = cte que representan una familia de hipérbolas equiláteras. Ejemplo 2: Para el ejemplo anterior, definir el vector aceleración o la aceleración del campo vectorial: de acuerdo con la definición de las componentes escalares [2.5.4b]:
→⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
=t
VxVzz
VxVyy
VxVxx
Vxxa
20.00).())(( xAAyAAxxa =++−−= 1 estos ejemplos fueron tomados de I. Shames .Mecánica de Fluidos.

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco
MOD 2 Modelos Cinemáticos en Análisis de Flujos Versión preliminar
16
Procediendo análogamente:
yAAAyAxya 20.0).(0).( =++−=
0=za reemplazando:
→→→→++= kjyAixAa 022
Ejemplo 3: Dado el campo de velocidades:
→→→→+−= ktjyxixV 1002010 2
determinar la velocidad y la aceleración de una partícula situada en el punto x = 1, y = 2 , z =5 , t = 0,1 La velocidad de la partícula en el punto es:
→→→→→→→+−=+−= kjikjiV 1040101,0.1001.2.201.10
y la aceleración:
)()(tVV
zVV
yVV
xV
tDVDa zyx ∂
∂+
∂∂
+∂∂
+∂∂
==
→→→→→→
operando, queda:
→→→→→+−−+−= kjxyxjyixxa 100)20)(20()2020(10 2
y luego reemplazar en el punto para tener el valor del vector aceleración en él.. Ejemplo 4: Ya vimos en el ejemplo 1 que dado el campo de velocidades pueden obtenerse las ecuaciones de las líneas de corriente. Ahora veremos el problema inverso, dada la ecuación de las líneas de corriente y el módulo de la velocidad en los puntos de la región, determinar el campo de velocidades. Supongamos que las líneas de corriente están dadas por las ecuaciones: y = C x es decir en forma general son rectas que parten del origen en cualquier dirección angular. Y supongamos que conocemos el módulo de la velocidad en cada punto, por ejemplo:

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco
MOD 2 Modelos Cinemáticos en Análisis de Flujos Versión preliminar
17
22 yx
kV+
=→
donde k es una constante para todo el campo. Observamos fácilmente que el denominador es el radio vector que define la posición de la partícula y que la velocidad en un punto del campo será inversamente proporcional a la distancia al origen. De la primera ecuación:
VxVy
dxdyC
xy
Cxy
===
→=
)(
como en general:
222 12)(1 CxVVxVy
xVyVxVV +=+=+=→
Igualando con la segunda ecuación y despejando:
22222 1 yxkx
Cyx
kxV
+=
++=
En la última expresión se tomó en cuenta que 2/22 xyC = , asimismo, :
Entonces, el campo de velocidades será:
→→→→→
++
+=+= j
yxyki
yxxkjyVixVV 2222
Este es el campo que produce una fuente ideal bidimensional. []
22 yxky
xCVyV+
==

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
MOD 3 Ecuaciones Integrales. Versión preliminar
1
3 ECUACIONES INTEGRALES La dinámica de movimiento del fluido pude ser descrita a través de las leyes físicas fundamentales de conservación de masa , cantidad de movimiento lineal y angular y energía, ver punto [1.7]. 3.1.- Procedimientos de análisis, Si tomamos una región de la masa fluida dentro del campo y la seguimos partícula a partícula según Lagrange, tendremos definido lo que se denomina un “sistema”. El fue defnido como una colección de partículas dentro del conjunto del campo de flujo, el sistema mantiene su identidad, aunque puede cambiar su forma condiciones y estado termodinámico a medida que evoluciona y transcurre el tiempo, o sea tomado como conjunto, puede deformar su volumen inicial, trasladarse y rotar, pero por definición no puede incorporar o perder masa. Una vez identificado el sistema se podrán aplicar los principios 1 a 4 ya definidos en el párrafo [1.7]. Sin embargo, ya vimos que es complicado identificar y seguir un sistema, ya que sería necesario seguir una multitud indefinida de partículas o mesovolúmenes en el campo; es mejor aplicar el criterio de Euler y definir una región fija del espacio que llamamos “Volumen de Control” , y observar y definir los cambios que se operan cuando el flujo se mueve a través de ella y las propiedades de interés del campo en esa región fija a medida que transcurre el tiempo.
Sin embargo los cuatro principios no se pueden aplicar directamente a volúmenes fijos sino a cantidades fijas de materia, por lo cual debemos encontrar un procedimiento que permita adaptar los principios físicos para aplicarlos a “volúmenes de control”. Este procedimiento permite establecer las denominadas “Ecuaciones Integrales aplicadas a Volúmenes de Control”, las que se utilizan principalmente para la resolución de problemas macro en flujo permanente. 3.2.-Variables Extensivas e Intensivas. En Termodinámica se hace una distinción entre las propiedades de la sustancia cuya medida depende de la cantidad de masa presente y aquellas cuya medida es independiente de esta. Las primeras, tales como el peso, la masa, el volumen, la cantidad de movimiento, la energía, etc, se denominan “Extensivas”, y las otras, que no dependen de la cantidad de sustancia presente, como la presión o la temperatura, se las denomina “Intensivas”. Las variables extensivas pueden transformarse en variables intensivas simplemente dividiendo por la cantidad de masa presente en el sistema; Msis, a veces a la variable así modificada se la denomina “específica”, y se indican con letras minúsculas. 3.3.- Relación entre sistema y volumen de control.
Consideramos un campo vectorial de velocidades ),,,( tzyxVV→→
= visto desde una referencia inercial, donde se observa un sistema finito de fluido en los instantes t, y (t + Δt). (aunque las conclusiones y formulas que obtengamos son válidas con pequeños cambios también para referencias no inerciales). En la figura siguiente 3..3_1, las líneas de corriente dibujadas corresponden al instante t. El sistema está en movimiento respecto al volumen de control, supongamos que en t, el sistema y el volumen de control. seleccionado coinciden en el espacio (en rigor el sistema constituye el conjunto de partículas que en el instante t ocupan la región definida por el Volumen de Control fijo dentro del campo fluido, no así en t + Δt, en que el sistema se ha desplazado respecto al volumen de control que por definición permanece fijo en el espacio.

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
MOD 3 Ecuaciones Integrales. Versión preliminar
2
En este caso la “cáscara” o los límites del volumen de control es perfectamente permeable al pasaje de las partículas, lo podemos imaginar como una jaula fija en el espacio de la terna de referencia, y en la cual el fluido puede pasar libremente, ya sea para entrar o salir.
En la figura siguiente 3.3_1., consideramos el campo de velocidades de un flujo ),,,( tzyxVV→→
= en el instante t referido al la terna inercial, atravesando la “jaula” del volumen de control y lo tomamos bidimensional por simplicidad, pero el desarrollo es perfectamente válido para flujo 3D. Consideremos ahora una propiedad extensiva o intensiva arbitraria N , es decir una función analítica del campo respecto del espacio y el tiempo, tratemos de relacionar el cambio de la propiedad N en el sistema en el intervalo Δt posterior a t ., con el cambio de la misma propiedad en el volumen de control, y en el mismo intervalo, lo que nos permitirá relacionar sistema y volumen de control cuando Δt → 0; o sea relacionar los dos métodos de análisis ya discutidos, el seguimiento del sistema (Lagrange) y el análisis de posición fija (Euler), ya que en Δt → 0 ambos coinciden.
Fig. 3.3_1
Primero definimos el valor específico de la propiedad N como η = N/M sis.t de donde deducimos que:
∫ ∫ ⋅=⋅=sist sist
dvdmN ρηη
Observemos ahora las tres regiones indicadas con 1, 2, 3 en la Fig.3.3_1 izquierda. Calculemos el “cambio” o la velocidad de variación de la propiedad N en el sistema durante el intervalo Δt (para lo cual debemos tomar la derivada sustancial ya que debemos seguir al sistema cuando empieza a abandonar al volumen de control) haciendo luego el paso al límite para Δt → 0 hasta hacer coincidir sistema y volumen de control. Así tenemos:
( ) ( )0
2 3 1 2lim
ttSIST
valor de N en valor de N endN DN t t tdt Dt Δ →
+ − +⎛ ⎞ + Δ= = =⎜ ⎟ Δ⎝ ⎠
Como el límite de una suma es igual a la suma de los límites, podemos escribir:

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
MOD 3 Ecuaciones Integrales. Versión preliminar
3
( ) ( ) 2 2
lim 0 tValor de N en en t t Valor de N en en t
t+ Δ −⎡ ⎤
= +⎢ ⎥Δ → Δ⎣ ⎦
0 3 1 lim lim0 t tt
Valor de N en en t t Valor de N en en tt Δ →
+ Δ⎛ ⎞ ⎛ ⎞+ −⎜ ⎟ ⎜ ⎟Δ → Δ Δ⎝ ⎠ ⎝ ⎠ [3.3.1]
Si consideramos ahora cada uno de los límites separadamente, vemos que cuando Δ t → 0 , el volumen 2 tiende al volumen seleccionado como “Volumen de Control”. Cuando hacemos esto, el primer término de [3.3.1] nos define una variación respecto al tiempo de la propiedad N dentro del recinto que definimos como “volumen de control” que podemos escribir como el cambio respecto al tiempo de la propiedad N, extendida a todas las partículas dentro del volumen de control :
∫∫ ⋅⋅∂∂
=⋅∂∂
CVCV
dvt
dmt ..
ρηη
Consideremos ahora el segundo término, o sea el cambio de la propiedad N en 3 cuando ∆t→0 En el límite, la región 3 coincide con la frontera ARB, y la razón de cambio con el tiempo de la propiedad N en 3, es entonces la que está incorporada a la masa que instantáneamente está cruzando a través de la frontera ARB hacia fuera del volumen de control. Esta masa a su vez está relacionada con la velocidad normal con que atraviesa, la frontera ARB y ya que la componente tangencial de la velocidad en un punto de la misma no puede hacer atravesar masa a través de ella. Definimos esto como el flujo de la propiedad N que atravesó el volumen de control en dirección normal a través de la frontera ARB hacia el exterior , que es igual numéricamente a:
segpropiedaddAVdAnV
ARBARB
=⋅⎟⎟⎠
⎞⎜⎜⎝
⎛⋅⎟
⎠⎞
⎜⎝⎛⋅⎟⎟
⎠
⎞⎜⎜⎝
⎛∗⋅⋅=∗⋅⋅ ∫∫
→→→→ 2msegm
3mKg
Kgpropiedad ρηρη
Observe que en el arco ARB de la frontera, el producto escalar es positivo, ya que la dirección del versor normal a la superficie dA positiva, coincide con el sentido de la velocidad y por tanto, el producto escalar está referido a un coseno positivo. Un análisis similar, se hace para por la región 1, pero en este caso el flujo de la propiedad está incorporado a través de nuevas partículas que han ingresado desde la izquierda al volumen de control a través de la frontera ALB, en este caso sería:
∫→→
∗⋅⋅ALB
dAVρη
ahora, la componente de →V y el versor normal dan lugar a valores negativos del flujo de la propiedad N
al pasar la frontera ALB hacia el interior del volumen de control, ya que la normal positiva se define siempre hacia fuera de la superficie de control, y queda en este caso opuesta al sentido de la velocidad que es entrante.

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
MOD 3 Ecuaciones Integrales. Versión preliminar
4
El resultado final para todo el volumen de control, es entonces:
∫∫∫→→→→→→
∗⋅⋅=⎟⎟⎠
⎞⎜⎜⎝
⎛∗⋅⋅−−∗⋅⋅
CSALBARB
dAVρηdAVρηdAVρη.
o sea la unión de los dos últimos términos de [3.3.1] nos dan en el límite el balance del flujo total de N que atraviesa la superficie de control en el instante t, lo que sale por ARB menos lo que entra par ALB.
Si adoptamos el criterio de que →
dA ó ∪
n dA están dirigidos hacia el exterior para una superficie cerrada, la suma algebraica como vemos da positiva con lo cual queda finalmente:
∫ ∫→→
∗⋅⋅+⋅⋅∂∂
=CV CS
dAVdvtDt
DN
. .
ρηρη [3.3.2]
La expresión [3.3.2] establece la velocidad de variación con el tiempo de la propiedad N o la razón de cambio de la propiedad para un “sistema” que en el instante t está casualmente ocupando el volumen .de control, pero transitando a través de él y es igual a la suma de dos términos: a.- La variación de la propiedad genérica N en el interior del volumen de control que tiene la forma del sistema en el intervalo Δ t, cuando Δ t →0 , y b.- El flujo de la propiedad genérica N por unidad de tiempo que atraviesa la superficie de control en el intervalo Δ t cuando Δ t →0. Como observación final, tome en cuenta que el primer miembro de la ecuación [3.3.2] responde al seguimiento de sistema (criterio de Lagrange) mientras que en el segundo miembro las integrales refieren a la posición fija de punstos en el espacio del volumen de control, (criterio Euleriano), así, esta ecuación estrella de la dinámica de fluidos, nos permite vincular ambos criterios. La ecuación [3.3.2] se la denomina también Ecuación de Transporte de Reynolds. Podrá preguntarse por que aparece en la nomenclatura una derivada parcial , si N es la única variable involucrada, esto obedece justamente a que N al representar una propiedad genérica puede ser tanto escalar como vectorial, en este último caso, la [3.3.2] representará una ecuación vectorial que se desdobla en dos ecuaciones escalares para el espacio plano o en tres para el espacio 3D, con dos o tres derivadas parciales sobre la propiedad según sus componentes. Ya dijimos también que el gráfico dado en la figura 3.3_1 puede generalizarse al espacio de tres dimensiones, las regiones dibujadas como elipses serían ahora elipsoides o regiones cerradas cualquiera de 3D, las líneas ALB y ARB serían ahora en 3D, dos cascarones delimitados por la intersección de los elipsoides; volumen de control y sistema , que compartirían en este caso una curva cerrada de Jordan,1 definida por la intersección del campo de velocidades con el volumen de control; el campo de velocidad de flujo será un campo de líneas de corriente del espacio 3D para flujo permanente.
1 Las curvas de Jordan son curvas cerradas simples, un 8 es una curva cerrada pero se corta a si misma, y no es una curva de Jordan, ya que en el punto de corte presenta dos tangentes.

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
MOD 3 Ecuaciones Integrales. Versión preliminar
5
La cantidad →
V es la velocidad vectorial con la que cada partícula entra o sale a través de la superficie de control, y están referidas a la terna inercial, hay algunos problemas que se pueden resolver tomando un volumen de control variable, con la superficie de control expandiéndose o contrayéndose con una
velocidad: →
bV en este caso la velocidad neta de intercambio de flujo con la pared, respecto de la terna inercial sería:
)(→→
− bVV , por lo cual para estos casos de volumen de control variable, la ecuación [3.3.1] queda:
∫ ∫→→→
∗−⋅⋅+⋅⋅∂∂
=CV CS
dAbVVdvtDt
DN
. .
)( ρηρη =
∫ ∫ ∫→→→→
∗−∗⋅⋅+⋅⋅∂∂
=CV CS CS
dAbVdAVdvtDt
DN
. . .
.. ρηρηρη [3.3.3]
[]

M4 INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
MOD 4 Aplicaciones de las Ecuaciones Integrales. Versión preliminar
1
4 APLICACIÓN DE LAS ECUACIONES INTEGRALES. 4.1.- Ecuaciones integrales: La deducción de las Ecuaciones Integrales para Volumen de Control, se hace en forma inmediata a partir de la ecuación genérica de Transporte de Reynolds [3.3.1].(ver Mod. 3). 4.2 Ecuación Integral de Continuidad o Conservación de Masa: Tomando en cuenta la definición de sistema que hemos dado en el punto [3.1], cuya pauta fundamental era que la masa permanece constante para un “sistema” definido dentro del campo, independientemente de su evolución o movimiento temporal dentro del mismo; esta condición la indicamos con : Msist = cte. La propiedad intensiva o especifica para la masa es de acuerdo a la definición de propiedad intensiva:
1==sistMsistMη
y si Msist es constante resulta que para su evolución Langrangiana : 0=⎟⎠⎞
⎜⎝⎛=
sistdtdM
DtDM
Por lo tanto, aplicando estos resultados a la ecuación 3.3.1 queda :
0] [. .
=∗+⋅∂∂
= ∫ ∫→→
CV CS
dAVdvtDt
MD ρρ [4.2.1]
que se define como la Ecuación Integral de conservación de masa. Casos particulares: Si el flujo es permanente, no hay variación temporal o cambios temporales de masa dentro del volumen de control a medida que transcurre el tiempo y el primer término de [4.2.1] es igual a 0, por lo tanto queda:
0]A [ =∗∫→→
SC
dVρ Flujo permanente y compresible. [4.2.1.b]
Si además el flujo es incompresible, ρ es constante, sale fuera de la integral y se anula por la igualdad a cero. El hecho que el flujo sea incompresible, significa que el volumen de control no admite más masa de las que posee en el instante t , o sea el sistema se desplaza respecto al volumen de control y entonces ingresa por unidad de tiempo una cantidad de masa igual a la que va saliendo. Entonces para flujo incompresible:
0=∗∫→→
SC
dAV [4.2.1c]
Suponiendo que no haya creación o destrucción de fluido dentro del v de c, puede haber no obstante, una variación (incremento o disminución de masa en el v de c, que solamente puede proceder del fluido que entra o sale del mismo debido a un cambio local de densidad o sea una variación exclusiva de la densidad con el tiempo ( / )tρ∂ ∂ . La masa que ingresa no forma parte del sistema bajo análisis, sino de un nuevo sistema que va a ir ocupando el volumen de control. Si el flujo es compresible puede ingresar más flujo del que sale del volumen de control, o recíprocamente, salir más de lo que entra, y la ecuación toma la forma [4.2.1b].

M4 INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
MOD 4 Aplicaciones de las Ecuaciones Integrales. Versión preliminar
2
Ejemplo 1: Consideremos el flujo permanente de la figura 4.2_1, donde el flujo entra en la sección 1, y sale por las secciones 2 y 3.
Fig.4.2_1 Si consideramos flujo permanente, aplicamos:
0
0] [
12 3
=∗+∗+∗
=∗
∫∫∫
∫→→→→→→
→→
AAdAVdAVdAV
dAV
A
SC
ρρρ
ρ
Si además el flujo es incompresible, las anteriores quedan:
[ ] 0
02 3 1
SCV dA
V dA V dA V dAA A A
→ →
→ → → → → →
∗ =
∗ + ∗ + ∗ =
∫
∫ ∫ ∫
observamos que de la totalidad del volumen de control, solamente hemos considerado las áreas de intercambio, ya que por el resto no pasa fluido. Para el caso general, suponiendo que el flujo sea compresible y la velocidad es normal a todas las superficies de intercambio del Volumen de Control y observando que las normales positivas quedan definidas hacia el exterior del Volumen de Control, queda:
2 2 3 3 1 1 0132
V dA V dA V dAA A A
ρ ρ ρ+ − =∫ ∫ ∫
Si las densidades y las velocidades se consideran uniformes a través de la totalidad del área por la que atraviesan, (flujo ideal o flujo real con velocidades promediadas en los conductos):
0111333222 =−+ AVAVAV ρρρ
Si la densidad es constante (flujo incompresible) queda finalmente:
113322 AVAVAV =+

M4 INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
MOD 4 Aplicaciones de las Ecuaciones Integrales. Versión preliminar
3
Llamamos a la identidad:
0] [ =∗= ∫→→•
SCdAVm ρ
Flujo másico o caudal másico, su unidad es [Kg/seg], y representa el balance del caudal en masa que está atravesando el volumen de control en el instante t , (lo que sale menos lo que entra) cuando el sistema ocupa exactamente el volumen de control. Análogamente, definimos:
0] [ =∗=∀ ∫→→•
SCdAV
Flujo volumétrico o caudal volumétrico, su unidad es [m3/seg] y representa el caudal en volumen que está atravesando el volumen de control en el instante t , cuando el sistema coincide con el volumen de control. 4.3.-Ecuación Integral de Cantidad de Movimiento Lineal. El principio de la conservación establece que la cantidad de movimiento lineal de un sistema, se mantiene constante para un sistema aislado en el que no actúan fuerzas externas sobre él, la cantidad de movimiento lineal se define como:
→→→→
→→
===→⋅= FamdtVdm
dtPdVmP
y si:
00 =→==→=⋅=→
→→→→
FdtVdm
dtPdCteVmP
O sea que a partir de la definición de cantidad de movimiento lineal, definimos la segunda ley de Newton.
dtVdmamF→
→→== .
Nuestra propiedad bajo estudio es la cantidad de movimiento lineal o sea ahora dentro del contexto de la ecuación [3.1.1] es:
→= PN
en este caso N es una cantidad vectorial, y su propiedad específica en este caso:
→→→
=== Vsistm
Vsistm
sistmPη
Aplicando la ecuación [3.3.1] y reemplazando, quedará :
∫∫→→→→
→→
∗+∂∂
==´
)(SCVC
AdVVdvVtDt
PDF ρρ [4.3.1]

M4 INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
MOD 4 Aplicaciones de las Ecuaciones Integrales. Versión preliminar
4
En el primer miembro, aparece la fuerza genérica →F neta aplicada o sumatoria de fuerzas aplicadas sobre
el volumen de control, como ya expresamos, está compuesta en general, por las fuerzas superficiales (proveniente de los esfuerzos de presión y de los esfuerzos de corte del fluido) actuantes sobre la
superficie de control, más la fuerza másica por unidad de volumen →f (proveniente de campos, como el
gravitacional y eventualmente otros, magnéticos o eléctricos), y las fuerzas exteriores →R aplicadas al
volumen de control para que el mismo se mantenga fijo respecto a la terna inercial.
La suma de las fuerzas que el flujo ejerce en el volumen de control, esta en equilibrio con →R que cumple
el papel de una equilibrante; invirtiendo el signo de la misma obtendremos la fuerza que el flujo aplica sobre el volumen de control. Explicitando las fuerzas que actúan en el v. de c. [4.3.1] queda, expresada en la forma:
[4.3.1.b]
En la forma más general, expandimos las fuerzas de superficie en la expresión anterior, quedando
[4.3.1.c]
que puede simplificarse para flujo permanente quedando:
∫∫∫∫→→→→→→→
∗=+++SC
VCSCSCAdVVRdvfdAsdAn )( ρτσ [4.3.1.d]
En el caso en que los vectores velocidad sean perpendiculares a las superficies de intercambio en el volumen de control, estos resultarán paralelos a la dirección del versor director de dA, y el coseno del ángulo formado por ambos vectores será 0º o 180º con respecto a las normales y el producto escalar será directamente el producto de los módulos con sus signos correspondientes.
∫∫∫∫∫∫→→→→→→→
−==+++ALBARBSC
VCSCSCVdAVVdAVVdAVRdvfdAsdAn )()( )( ρρρτσ [4.3.1.e]
Donde hemos considerado que podemos definir una superficie de entrada del flujo en el v de .c con (ALB) y la superficie de salida del volumen de control con (ARB) siendo la variable específica η en este caso la velocidad del flujo, (vea la Fig.3.3.1del Mod. 3). Tome en cuenta que la anterior es una ecuación vectorial y da lugar en general a tres ecuaciones escalares. Para el último sumando del primer miembro, también resulta que si solamente consideramos la gravedad como campo exterior que influencia a las partículas del flujo entonces la única fuerza másica presente es el peso del flujo dentro del v. de c., quedando este término:
) ( ´ →→→→→→→
∗+∂∂
=++ ∫∫∫ AdVVdvVt
RdvfFSCVCVC
s ρρ
) ( ´ →→→→→→→→
∗+∂∂
=+++ ∫∫∫∫∫ AdVVdvVt
RdvfdAsdAn SCVCVCSCSCρρτσ

M4 INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
MOD 4 Aplicaciones de las Ecuaciones Integrales. Versión preliminar
5
VC VC VC
gdm kf dv dv g dm k w kdv
→→ → →−
= = − = −∫ ∫ ∫ [4.3.2]
Ejemplo 1: La figura siguiente, muestra un flujo ideal, permanente e incompresible pasando a través de un acodamiento reductor o pipa. Vamos a determinar la fuerza que el fluido ejerce sobre el codo reductor entre las secciones 1 y 2.
Fig.4.3_1
Primero definimos los límites del volumen de control, que en este caso hemos tomado entre las secciones de intercambio 1 y 2 y la pared exterior del conducto, lo que incluye su anclaje de soporte, ya que nuestra consideración primaria es que el volumen de control debe estar quieto respecto a la terna inercial, el volumen de control se indica en línea de trazos, también podemos considerar que las áreas A1 y A2 son vistas de secciones circulares, es decir tendremos un acodamiento de sección decreciente. El fluido entra y sale del acodamiento a través de tuberías cilíndricas y su presión manométrica en las secciones son: p1 y p2 respectivamente. Inicialmente aplicamos la ecuación [4.3.1e] ya que se trata de un flujo permanente., y las normales a las áreas de intercambio coinciden con la dirección de las velocidades a la entrada y la salida, también observamos que en nuestro caso no hay esfuerzos tangenciales sobre la superficie de control, ya que para las superficies sólidas solamente actúan presiones normales exteriores debidas a la presión atmosférica, y para las superficies de intercambio, si se supone una velocidad uniaxial uniforme no hay gradiente de velocidad y las tensiones tangenciales son nulas, [implícitamente esto está definiendo un flujo ideal], entonces:
0=∫→
SCdAnτ
resultando:
∫∫∫∫∫→→→→→→
−==++ALBARBSC
VCSCVdAVVdAVVdAVRdvfdAn )()( )( ρρρσ
Analicemos ahora el primer miembro,
M4 INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
MOD 4 Aplicaciones de las Ecuaciones Integrales. Versión preliminar
6
Las fuerzas →R están compuestas por las componentes de las fuerzas exteriores sobre el anclaje, Rx y Ry ,
aplicadas a la superficie exterior del codo, donde está definida la superficie de control.. La segunda integral [suponiendo la existencia de un solo campo conservativo externo que es el
gravitatorio], es la fuerza →
− kw según el resultado [4.3.2], y es el peso del codo y el fluido contenido en el codo, que al ser el flujo permanente, se mantiene constante en el tiempo. Finalmente la primera integral son las fuerzas exteriores normales aplicadas al volumen de control, que en este caso son solamente las presiones interiores aplicadas sobre las áreas de intercambio tomadas en sus componentes y con sus correspondientes signos, las presiones sobre las paredes exteriores del v de c como dijimos se cancelan mutuamente por la geometría del codo.
hacemos explícito el valor de las tensiones normales: dA p n dAnσ→ →= − que es la fuerza normal
diferencial aplicada en cada area elemental de la s de c, , la resultante neta sobre el v de c es entonces:
.s c
p n dA→− ∫
Las fuerzas elementales, siempre están dirigidas hacia el interior del v de c. Si analizamos la forma del codo, podemos ver que como no hay velocidades ni fuerzas según la dirección z, perpendicular al plano del papel, podemos evaluar el problema entonces solamente con las componentes x e y. Las dos componentes de las fuerzas del primer término serán entonces:
θθ
senApWRyyFApApRxxF
F22
1122 cos−−=
+−=→∑∑∑
→
Las presiones p1 y p2 representan las presiones manométricas 1 , R x y R y son las resultantes de la
fuerza →R que ejerce el anclaje sobre la pared exterior del codo para mantener quieto al volumen de
control, (por supuesto el codo debe estar sostenido exteriormente, ya sea por una fijación o por la misma tubería, para que la pared exterior pueda producir tensiones equilibrantes al embate del flujo, estas fuerzas compensan a las tensiones normales y tangenciales que el flujo ejerce sobre los limites interiores no abiertos del volumen de control, es decir, en rigor, son fuerzas equilibrantes para que el codo no se mueva y tienen la dirección y sentido necesarios para que el mismo esté en equilibrio. Recíprocamente podemos decir que cuando el volumen de control esta quieto, estas fuerzas son las resultantes con signo opuesto de la distribución de tensiones normales y tangenciales que el fluido ejerce dentro sobre el codo. O sea las fuerzas activas que el fluido ejerce sobre la pipa, son iguales y opuestas a Rx y Ry, la única fuerza interna másica es la fuerza de gravedad y es igual al peso del fluido y del codo w contenido entre 1 y 2, en muchos casos esta fuerza como dijimos puede despreciarse frente a las otras, en particular cuando se mueve un gas , o sea para problemas con gases se puede considerar:
.. 0
V Cw k f dv
→ →
− = ≈∫ ,
1 Las presiones son manométricas, ya que si consideramos presiones absolutas sobre las áreas A1 y A2, se deben tomar también las presiones atmosféricas exteriores aplicadas sobre las paredes curvas del tubo, que pasarían a actuar también sobre la superficie de control, y el cálculo neto de presiones sobre las áreas sería p1 abs - pat = p1 y p2 abs - pat = p2 o sea es equivalente a tomar presiones manométricas y no considerar a la presión atmosférica exterior.

M4 INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
MOD 4 Aplicaciones de las Ecuaciones Integrales. Versión preliminar
7
por su parte, en el análisis del segundo miembro de la ecuación, los términos de cantidad de movimiento del flujo, son expresándolos en sus componentes x e y::
1 2
2
( ) ( ) 2 ( ) cos1 1 2 2 2 2 2 2 1 1 11
( ) ( )2 2 2 2 2 2 2
SC A A
SC A
V V dA V V dA V V dA A V V A Vx
V V dA V V dA A V V seny
ρ ρ ρ ρ θ ρ
ρ ρ ρ θ
→ → → → → →
→ → → →
∗ = ∗ + ∗ = −
∗ = ∗ =
∫ ∫ ∫
∫ ∫
Aquí se ha tomado valores medios de las componentes de la velocidad en la entrada y salida o sea el flujo se ha considerado uniaxial en estas secciones y la presión constante sobre las secciones , y consideramos los productos escalares con sus signos. Así las integrales son fáciles de evaluar. Entonces podemos igualar con los primeros miembros con lo que tenemos, considerando los signos de las presiones y las normales a las áreas
: 2 2
1 1 2 2 2 2 2 1 1 12
2 2 2 2 2
[ ] cos cosp A p A Rx A V AV
p A sen w Ry A V sen
θ ρ θ ρ
θ ρ θ
⎫− − − + = − ⎪→⎬− − + = ⎪⎭
2 2
1 1 2 2 2 2 2 1 1 12
2 2 2 2 2
cos cosp A p A Rx A V AV
p A sen w Ry A V sen
θ ρ θ ρ
θ ρ θ
⎫− + = − ⎪⎬
− − + = ⎪⎭
Como por la ecuación de continuidad o conservación de masa: •
== mAVAV 222111 ρρ , las anteriores pueden ser escritas en función del caudal másico fácilmente.
→⎪⎭
⎪⎬⎫
=+−−
−=+−•
•
)2(
)1cos2(cos
22
2211
θθ
θθ
senVmRywsenAp
VVmRxApAp
)cos()1cos2( 2211 θθ ApApVVmRx −−−=•
θθ senApwsenVmRy 11)2( ++=•
Al final, si al hacer los cálculos los signos coinciden con las direcciones supuestas inicialmente para Rx y Ry, en nuestro grafico ambas positivas, ellas fueron correctamente consideradas, de lo contrario, van en sentido opuesto. Téngase en cuenta que estas son fuerzas reactivas, es decir las equilibrantes de la pipa o volumen de control para que este no se mueva, como ya dijimos, las fuerzas que el fluido ejerce sobre la pipa Kx y Ky, son iguales y opuestas, y valen:
)cos()1cos2( 2211 θθ ApApVVmKx −+−−=•
θθ senApwsenVmKy 11)2( −−−=•

M4 INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
MOD 4 Aplicaciones de las Ecuaciones Integrales. Versión preliminar
8
Ejemplo 2: Un motor de reacción se prueba estáticamente sobre un banco de pruebas, se mide una velocidad de entrada de aire de 150 m/seg y una velocidad de salida de los gases de escape de 1200 m/seg . El aire de entrada y los gases de escape están a la presión atmosférica , la relación de mezcla (combustible / aire) es 1/50 y las áreas de entrada y salida son ambas de 0.18 m2 , la densidad del aire que entra es 1.23 Kg/m3 . Determinar cual es la fuerza Tx que se requiere para mantener quieto el motor en el banco. Fig.4.3_2 Igual que en el caso anterior , hemos considerado la superficie de control, comprendida entre las secciones 1 y 2 y la pared exterior del motor. Partimos de la ec integral general para cantidad de movimiento:
∫∫→→→→→
∗+∂∂
=SCVC
AdVVdvVt
F )(ρρ
como el problema es uniaxial y los vectores velocidad los consideramos constantes en promedio y normales en cada una de las secciones 1 y 2 y además el flujo es permanente dentro del volumen de control, la anterior se reduce a una sola componente:
12)()( xVamxVcmamAdVVxFSC
•••→→→
−+=∗= ∫ ρ
ma representa la masa de aire, mc la masa de combustible, observe que al tratarse de flujo uniaxial y el problema está planteado para el eje x , la ecuación vectorial se transforma en una sola ecuación escalar, por otra parte la suma de fuerzas del primer miembro es::
xTApApxF +−=∑ 2211 recuerde que Tx representa la fuerza exterior necesaria para mantener quieto el volumen de control, entonces igualando ambas expresiones:
12)(2211 xVamxVcmamxTApApxF•••
−+=+−= como p1 = p2 = 0 ya que ambas son presiones manométricas y están en contacto con el medio ambiente, operando queda:
xVamxVamam
cmxVamxVcmamxT 12 ) 1 ( 12)(
••
•
••••
−+
=−+=
en esta expresión el dato que queda por averiguar es el caudal másico de aire, por tanto:

M4 INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
MOD 4 Aplicaciones de las Ecuaciones Integrales. Versión preliminar
9
segKgsegmmmKgVAam /21.33/ 150 2 18.0 3/ 23.11 1 ===•
ρ reemplazando este valor, con el resto de los datos:
KNewsegmsegKgsegmTx 66.35/ 150 /21.33/ 1200 Kg/seg. 3.213 )5011( =−+=
Ahora vemos que como da un valor positivo, el sentido de la fuerza reactiva supuesto fue correcto, y el empuje estático del motor será hacia adelante e igual y opuesto a esta fuerza. 4.4.- Ecuación Integral de la Cantidad de Movimiento Angular: (o Momentum de la cantidad de
movimiento)
La equivalencia rotacional de la segunda ley de Newton para partículas en movimiento referidas a un sistema inercial es:
tDHDT
tDPDF
tDωDJT
tDVDmF
JTamF
→→
→→
→→
→→
→→→→
=→=
=→=
=→⋅= α
donde →H es la cantidad de movimiento angular respecto a un punto fijo cualquiera de la terna inercial o al
origen mismo, definida como:
∫→→→
×=SIST
dmVrH )( [4.4.1]
En estas expresiones:
→T representa torque o par, que es el equivalente rotacional de la fuerza, [New.m];
J representa el equivalente rotacional de la masa y es el momento de inercia, →H el equivalente rotacional de la cantidad de movimiento lineal , llamada cantidad de movimiento angular, o momentum angular.
→r es el radio vector tomado desde el punto fijo seleccionado a cada partícula dm.
La segunda ley de Newton en rotacional, indica que la sumatoria de los torques aplicados a un sistema discreto, es igual a la derivada primera del “momentum angular” o sea
tDHDT
→→= . [4.4.2]
Vamos ahora a analizar el segundo miembro de [4.4.2], como:
∫→→
→→→→→→→
×==→×=→×=SIST
Vrdm
HddmVrHddmVrH )( )( )( η

M4 INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
MOD 4 Aplicaciones de las Ecuaciones Integrales. Versión preliminar
10
Entonces reemplazando en la ecuación general de trasporte [3.3.2] para el caso concreto de [4.4.2] queda:
∫ ∫ ∫→→→→→→→→→→→
→→
∗×+×∂∂
=+×+×==VC VC SC
s dAVVrdvVrteTdvBrFr
tDHDT )()( ρρ [4.4.3]
Los torques externos en nuestro esquema para el volumen de control están dados por tres sumandos que son los componentes correspondientes a: 1.- Los torques respecto a un punto genérico A fijo de la terna inercial de las fuerzas superficiales sobre
la superficie de control, sFrTs→→→
×= , el punto A es el centro instantáneo de rotación.
2.- Los componentes de torque de las fuerzas de campo, →→→
×= BrBT .respecto al mismo punto, extendidos a todo el volumen.
3.- El torque externo puro →Te ,o sea el momento equilibrante necesario para mantener quieto al
volumen de control. La Ec. [4.4.3] aplicada para flujo permanente da por la anulación del primer término del segundo miembro:
∫→→→→→
∗×=SC
dAVVrT )()( ρ [4.4.3b]
Ejemplo 3: El motor regador de agua o molinete de riego que es común verlo en los jardines, utiliza los principios de reacción de impulso angular y era conocido ya en la antigüedad en Grecia como Motor de Herón (hacia el 140 A.C) , de hecho es el primer ejemplo de motor de reacción de la historia, en la figura siguiente Fig. 4.4_1 se da un esquema del mismo. Fih.4.4_1 El agua ingresa en la base del aparato con un caudal volumétrico q = V1 A1 y es lanzado por las dos salidas opuestas con velocidad : V2 = q / 2 A2 .donde A1 es el area de la boquilla de entrada y A2 idem de las salidas. El volumen de control se toma sobre toda la superficie interior del brazo giratorio, y al observar que las únicas fuerzas que producen acción de giro son las componentes según el eje horizontal y , y que el flujo

M4 INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
MOD 4 Aplicaciones de las Ecuaciones Integrales. Versión preliminar
11
es permanente, trabajaremos la ecuación vectorial 4.4.3b para la componente y los que nos dará componentes de momento solamente para el eje z que pasa por el centro del aparato. La componente de velocidad según x no produce acción rotacional. Como la expulsión de los chorros de agua se hace a la presión atmosférica, concluimos que la resultante de las fuerzas superficiales será nula, asimismo la resultante de las fuerzas másicas tiene la dirección del eje z , y por tanto serán nulos los momentos respecto al eje z , tampoco hay torque equilibrante, Te ya que queremos que el regador gire.
0=→Ts
0=→Te por tanto la aplicación de la ecuación 4.4.3b dará:
]22 2 ][ cos 22[ AVVLTZ ρα=
operando queda:
2 2
) cos22 2( ALVTz ρα=
finalmente reemplazando V2 por su expresión en función del caudal V2 = q / 2 A2 y operando queda:
αρ cos 24
2L
AqTz =
que es el valor del torque reactivo inicial que produce el regador, este es un torque permanente que da lugar a aplicar la segunda ley en rotacional αJTz = (en este caso α representa la aceleración angular) o sea un torque constante produce una aceleración constante y por tanto la velocidad angular ω según el eje z, del regador tendería a aumentar permanentemente hasta destruirlo, por que esto no ocurre ? 4.5.- Ecuación Integral de la Energía: Un sistema físico compuesto de una parcela de fluido en movimiento define un sistema departículas, el mismo posee en cada instante, un estado energético E, la energía del sistema es la suma de la energía de cada una de sus partículas, y esta suma incluye: la energía cinética del conjunto (de movimiento respecto al CM del sistema), la energía potencial (gravitatoria) y otras formas de energía que provienen principalmente de la agitación molecular agrupadas como (energía interna). Este estado energético se define como Energía almacenada. Entonces la energía almacenada en el sistema para un flujo de fluido se cuantifica desglosando la energía en tres componentes:
• Cinética = ½ MV2
(que es una magnitud escalar, ya que cada partícula se aceleró a una velocidad →V por aplicación de una
fuerza aplicada según una trayectoria, o sea por aplicación de un trabajo mecánico:

M4 INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
MOD 4 Aplicaciones de las Ecuaciones Integrales. Versión preliminar
12
221 MVVVdMds
dtVdMdsF =∗=∗=∗
→→→→
→→
∫∫ ∫ )
• Potencial gravitatoria = M.g.z • Interna (que proviene de los campos internos de masa molecular) = Ei.
De manera que:
zgMMViEE ++= 2
21
La variable intensiva de la energía almacenada se obtiene al dividir la anterior por la masa del sistema:
zgViee ++= 2
21
En estas ecuaciones la velocidad en módulo V y la altura z se miden en el centro de masa instantáneo del sistema, la energía interna Ei es el promedio de la energía interna de todas las partículas que lo componen y se asocia también al centro de masa. Cuando tratamos con flujo de gases reales tales como el aire, se asume en primera aproximación que se comportan como gases perfectos y en general consideramos que la energía interna solamente está compuesta por energía térmica, que es función solamente de la temperatura absoluta. Cuando se trata con sistemas abiertos, aparte de la energía almacenada, pueden existir otros tipos de energía asociados al sistema debido a su interacción con el medio ambiente se denominan Energías de transición, están definidas trabajo mecánico y calor. El trabajo mecánico que una fuerza realiza sobre una partícula que es movida a lo largo de una trayectoria cualquiera s , se define en general como:
∫∫∪→→→
∗=∗= dstFdsFW ,
y es una magnitud escalar. El trabajo que realiza un sistema sobre el medio ambiente, se representa con W y se considera positivo [Fig.4.5_1]. Recíprocamente, si el medio ambiente realiza trabajo sobre el sistema, este se considera negativo.
Aquí no se debe confundir sistema con volumen de control, el volumen de control ocupa una región fija del espacio. En t = 0 el sistema está formado con las partículas de flujo que ocupan justamente el volumen de control, y luego evolucionan a través y hacia afuera de él. El sistema no es fijo sino que evoluciona , pero su masa se mantiene constante.

M4 INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
MOD 4 Aplicaciones de las Ecuaciones Integrales. Versión preliminar
13
Fig..4.5_1
La unidad de trabajo mecánico en MKS es el New . m = Joule. A su vez, 1 Joule = 1New . m = 1 [Kg m/seg2] . m = 1 [Kg m2/seg2]
Y la unidad específica del trabajo mecánico es: [ ] ⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡=⎥⎦
⎤⎢⎣⎡=
2
222 /1segm
kgsegkgm
sistMWw
El Calor. Si el sistema y el medio ambiente tienen temperaturas diferentes y la membrana real o imaginaria de separación es capaz de permitir pasaje de calor hacia o desde el sistema mientra este evoluciona, se produce un intercambio de energía de otro tipo diferente al trabajo; llamado Transferencia de Calor. No es correcto afirmar que un sistema contiene calor, ya que el calor sólo se manifiesta si hay transferencia. Calor y trabajo, son energías de transición, y funciones de trayectoria a diferencia de las otras formas de energía como cinética, potencial, e interna, que son funciones de punto y definibles por campos. La energía en forma de calor y/o trabajo mecánico puede cruzar las fronteras del sistema pero por definición de sistema la masa no puede hacerlo, pero el sistema puede cambiar de volumen y de forma. Como son formas de energía, el calor y el trabajo poseen equivalencias entre sí, cuantificadas por: 1 cal pequeña = 4.18 Joule 1 BTU = 778 lib. Pie Enunciado de la primera Ley de la Termodinámica: En referencia a la Fig.4.5_1, la primera ley expresa que, el balance neto de energía almacenada y de transición, se mantiene constante en las transacciones entre el sistema y medio ambiente o sea que no se pierde ni se gana energía (es el tercer principio de conservación). Si 12W es el trabajo efectuado por el sistema sobre el medio ambiente y 12Q es el calor recibido por el sistema, desde el medio ambiente, entre los dos estados 1 y 2 o inicial y final considerados, resulta:
12 12 2 1Q W E E− = − [4.5.1] O sea, energía que recibe el sistema en forma de calor menos energía que transfiere el sistema al medio ambiente en forma de trabajo mecánico, es igual al cambio de estado de energía almacenada dentro del sistema.

M4 INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
MOD 4 Aplicaciones de las Ecuaciones Integrales. Versión preliminar
14
Aquí se debe recordar de Termodinámica que el sistema puede evolucionar del estado 1 al 2 de diferentes formas; la energía que el sistema contiene en 1 y 2 es: E1 y E2 respectivamente, o sea en los estados de extremo, son funciones de estos puntos, independientemente del proceso por el cual el sistema llegó de 1 a 2, pero Q12 y W12 no se pueden calcular separadamente a partir de los estados extremos sino que dependen de cómo fue realizado el proceso que lleva al sistema de 1 a 2, no obstante la diferencia Q12 -W12 es una constante que si depende de los estados extremos 1 y 2. y esta diferencia es: E2 - E1. Es decir, calor y trabajo no son diferenciales exactas y ellas no pueden ser definidas por campos, pero su diferencia si lo es y puede ser definida por la diferencia de una función de campo. Por tanto si tomamos un intervalo ∆t, entre los estados 1 y 2, en el cual calor y trabajo se intercambian desde o hacia el medio ambiente con el sistema, las velocidades o razones de cambio de estas variables pueden definirse matemáticamente como:
•=
ΔΔ
→ΔQ
tQ
t 0lim
•
=ΔΔ
→ΔW
tW
t 0lim
dependiendo de la trayectoria termodinámica. En tanto que los componentes de la energía almacenada tendrán cambios instantáneos, definidos por:
DtiDE
tiE
t=
ΔΔ
→Δ 0lim
DtDVmV
DtmVD
DtcDE
tcE
t===
ΔΔ
→Δ)2/2(
0lim
DtDzmg
DtmgzD
DtpDE
tpE
t===
ΔΔ
→Δ)(
0lim
el cambio energético del sistema quedaría entonces a partir de la [4.5.1]:
DtDzmg
DtDVmV
DtDEiEE
DtDWQ ++=−=−
••]12[
A veces esta última se la denomina Ecuación diferencial de la energía. Observe que usamos la notación QQ
dtδ•
= , WWdtδ•
= para representar flujos de energía a través de la
superficie de control, entre t y ( t+∆t) teniendo en cuenta que calor y trabajo no son funciones de punto del campo de flujo, sino de trayectoria entre los estados del sistema en t y (t+Δt) cuando Δt → 0, y que no son expresables como razones de diferenciales exactas, sin embargo su diferencia da una función de punto del campo que es la energía almacenada en el sistema entre t y ( t+∆t) , lo mismo ocurre con •
m que la usamos para definir una razón de flujo másico con respecto al tiempo a través de un volumen de
control, sin perder de vista que 0=DtDm para el sistema, es decir su masa permanece constante.

M4 INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
MOD 4 Aplicaciones de las Ecuaciones Integrales. Versión preliminar
15
Se han indicado los signos positivos para estas transacciones entre sistema y medio ambiente Fig.4.5_1; por el contrario, si el calor es quitado del sistema o si el medio ambiente hace trabajo compactando al sistema sus signos son negativos. Observe que la frontera dibujada en el esquema corresponde al límite del sistema (una suerte de bolsa virtual donde están contenidas una parte definida de las partículas del flujo) que coincide con el volumen de control solamente en t = 0. También en la aplicación de la Ecuación de Energía, o Primera ley de la Termodinámica, que es un principio básico, se debe tener en cuenta como principio secundario la Segunda ley de la Termodinámica que obra como un censor de la aplicación de la primera ley. La segunda ley impide la direccionalidad del flujo de calor desde la fuente menos caliente hacia la más caliente, e impide que una dada cantidad de calor pueda transformarse íntegramente en trabajo mecánico. Estas transacciones no resultan prohibidas taxativamente por el enunciado de la primera ley. vamos a aplicar ahora la ecuación de transporte e Reynolds a la energía. La cantidad específica de energía almacenada e para el sistema completo se define como:
∫ ∫==SIST SIST
dvedmeE ρ
y que a fin de aplicar la ecuación general de transporte. Ec.[3.3.1] queda para la cantidad específica:
zgViee ++== 2
21η
Donde e = E / Msist. La aplicación de la ecuación general de Transporte de Reynolds entre sistema y volumen de control [3.3.1] con N = E, e=η , nos dará derivando respecto del tiempo la [4.5.1]:
)(∫∫→→••
∗+∂∂
==−SCVC
AdVedvetDt
DEWQ ρρ [4.5.2]
La variación de energía del sistema está entonces igualada a la variación de energía dentro del volumen de control y la parte de la energía que fluye a través de la superficie de control.
En el primer miembro, •
W representa un balance o variación del trabajo mecánico total respecto del tiempo o potencia intercambiada con el medio ambiente, se compone de: al trabajo para impulsar el flujo que está entrando y saliendo del volumen de control en su interacción con el medio ambiente a través de las superficies de intercambio, llamado trabajo de flujo y al trabajo mecánico que entra o sale del volumen de control a través de mecanismos instalados dentro del volumen de control. Estos mecanismos son generalmente rotantes como molinetes o hélices, en ambos casos desde el volumen de control salen ejes con desplazamiento de rotación.
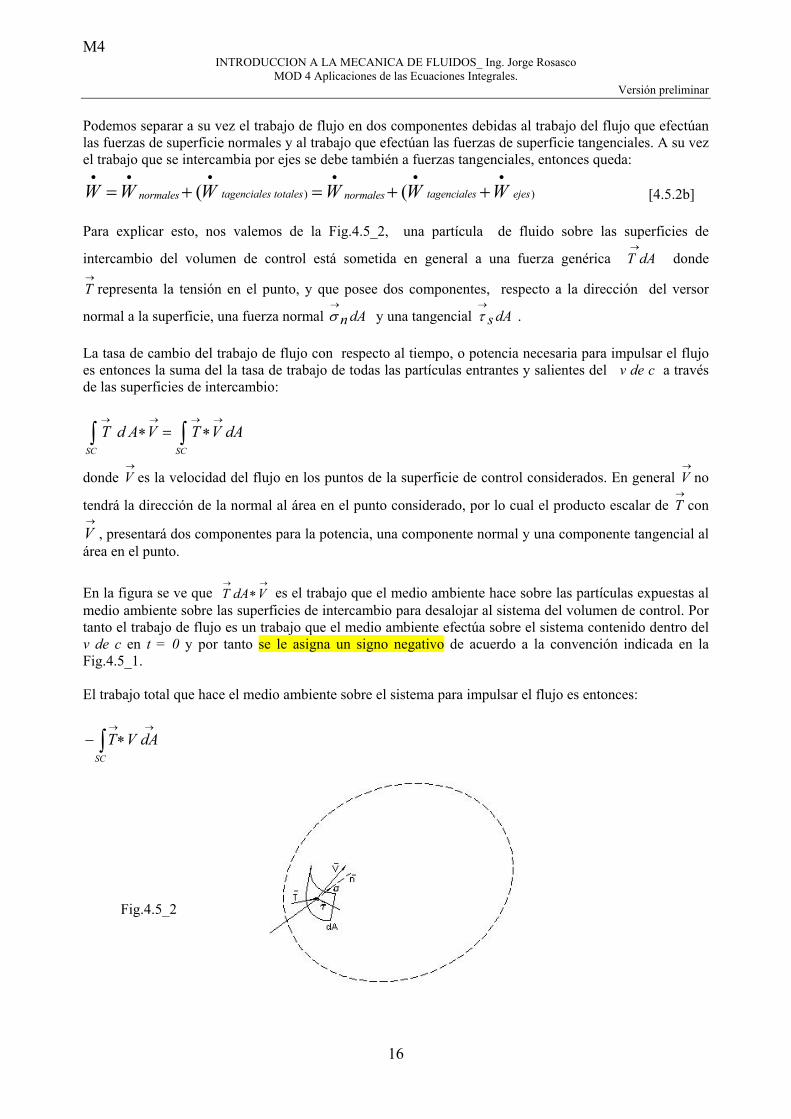
M4 INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
MOD 4 Aplicaciones de las Ecuaciones Integrales. Versión preliminar
16
Podemos separar a su vez el trabajo de flujo en dos componentes debidas al trabajo del flujo que efectúan las fuerzas de superficie normales y al trabajo que efectúan las fuerzas de superficie tangenciales. A su vez el trabajo que se intercambia por ejes se debe también a fuerzas tangenciales, entonces queda:
) )( (tagenciales totales tagenciales ejesnormales normalesW W W W W W• • • • • •
= + = + + [4.5.2b] Para explicar esto, nos valemos de la Fig.4.5_2, una partícula de fluido sobre las superficies de
intercambio del volumen de control está sometida en general a una fuerza genérica →
dAT donde →T representa la tensión en el punto, y que posee dos componentes, respecto a la dirección del versor
normal a la superficie, una fuerza normal dAn→σ y una tangencial dAs
→τ .
La tasa de cambio del trabajo de flujo con respecto al tiempo, o potencia necesaria para impulsar el flujo es entonces la suma del la tasa de trabajo de todas las partículas entrantes y salientes del v de c a través de las superficies de intercambio:
SC SC
T d A V T V dA→ → → →
∗ = ∗∫ ∫
donde →V es la velocidad del flujo en los puntos de la superficie de control considerados. En general
→V no
tendrá la dirección de la normal al área en el punto considerado, por lo cual el producto escalar de →T con
→
V , presentará dos componentes para la potencia, una componente normal y una componente tangencial al área en el punto.
En la figura se ve que T dA V→ →
∗ es el trabajo que el medio ambiente hace sobre las partículas expuestas al medio ambiente sobre las superficies de intercambio para desalojar al sistema del volumen de control. Por tanto el trabajo de flujo es un trabajo que el medio ambiente efectúa sobre el sistema contenido dentro del v de c en t = 0 y por tanto se le asigna un signo negativo de acuerdo a la convención indicada en la Fig.4.5_1. El trabajo total que hace el medio ambiente sobre el sistema para impulsar el flujo es entonces:
SC
T V dA→ →
− ∗∫
Fig.4.5_2

M4 INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
MOD 4 Aplicaciones de las Ecuaciones Integrales. Versión preliminar
17
y también se ve que las componentes tangenciales puras de la tensión no contribuyen a desalojar fluido del v. de c. porque su acción es rasante y queda fuera del mismo, sin embargo una pequeña parte de las tensiones tangenciales del campo, deben ser incorporadas a la presión isotrópica normal, ya que la tensión en cada punto de un fluido real en movimiento no es isotrópica según vimos en el Mod. 2b., volveremos sobre esto en los párrafos siguientes. Volviendo a la ecuación [4.5.2b], vemos entonces que el trabajo mecánico por unidad de tiempo, se descompone en tres partes, trabajo de flujo de las fuerzas normales, trabajo de flujo de las fuerzas tangenciales y trabajo intercambiado con el medio ambiente a través de ejes. En los problemas de ingeniería los ejes vinculan el volumen de control con el medio ambiente es decir salen a través de la superficie de control en algún punto, por lo general fuera de las áreas de intercambio de flujo. El trabajo de ejes a la salida de la membrana del v. de c, produce esfuerzos tangenciales de torsión cuando se le aplica una carga útil exterior, por ejemplo, se produce cuando un eje atraviesa la superficie de control y rota , ya sea introduciendo o quitando trabajo mecánico; en el área de intersección del eje con la superficie de control, hay esfuerzos tangenciales dentro del eje sólido con velocidades no nulas (la velocidad de rotación del eje) esta combinación, produce el denominado trabajo de eje por unidad de tiempo, (véase Fig.4.5_3). Fig.4.5_3. Entonces la ecuación [4.5.2b] separando el trabajo de ejes quedará:
( )( ) tagenciales ejesnormalesejeSC
W V dA W W W Wn sο τ• • • • •→ → →= − + ∗ + = − + +∫ [4.5.2c]
y la expresión [4.5.2] quedará entonces:
( ) ( )VC SC
DEQ W Q W W W e dv e V d An tejes Dt tρ ρ
• • • • • • → →∂− = − + + = = + ∗
∂ ∫ ∫
El trabajo por unidad de tiempo de las fuerzas normales podemos expresarlo como:

M4 INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
MOD 4 Aplicaciones de las Ecuaciones Integrales. Versión preliminar
18
SC
W n p V d A• → →
= − ∗∫
ya que las tensiones normales n→
σ en cada punto del campo, tienen componentes diferentes entre si según los tres ejes, se consideraba en el análisis como la suma de la presión termodinámica que es un invariante isotrópico de la dirección, y que como hemos visto es una tensión de compresión, más unas pequeñas componentes remanentes, que completan la matriz de tensiones tangenciales.
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−
−=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
→
zzyzxzyzyyxyxzxyxx
pp
p
zzyzxzyzyyxyxzxyxx
T'''''''''
000000
τττττττττ
στττστττσ
donde:
zzpzzyypyyxxpxx
'''
τστστσ
+−=+−=+−=
si la viscosidad del fluido es pequeña y si los gradientes de velocidad en la dirección del flujo son también pequeños, en general se podrá despreciar el complemento tangencial de las tensiones normales; en caso
contrario, ellas forman parte del sumando Wt•
. El resto del trabajo por unidad de tiempo de las fuerzas tangenciales en la mayoría de los problemas es nulo debido a que: a.- la dirección del vector velocidad es normal a las superficies de intercambio con el v. de c. con lo cual las componentes del trabajo de las fuerzas tangenciales resulta nulo sobre ellas, y en caso contrario son rasantes, y la componente tangencial no contribuye al trabajo de flujo. b.-cuando hay tensiones tangenciales sobre las superficies interiores del v. de c. , sobre ellas la velocidad es nula, debido al principio de no-deslizamiento, anulando por tanto el trabajo de las fuerzas tangenciales en las paredes interiores sobre las superficies sólidas. c.- en el resto del campo de flujo dentro del v de c. las partículas de fluido en rozamiento mutuo, cancelan sus acciones por el principio de acción y reacción y no contribuyen al trabajo mecánico. Sin embargo mantendremos en general las tensiones tangenciales en las ecuaciones para su validez general, ya que parte de las tensiones tangenciales se incorporan como dijimos a la presión no isotrópica en el caso general, también pueden aparecer en algunos problemas donde se extraiga o se agregue trabajo a través de cintas planas o placas planas que salgan del v. de c.
Reemplazando todas las componentes de •
W , [4.5.2c] en [4.5.2b]:
( ) [ ]SC
Q W Q W W W Q pdA V W Wejesn t tejes• • • • • • • → → • •
− = + + − = + − + −∗∫
reemplazando en la [4.5.2] y operando,:

M4 INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
MOD 4 Aplicaciones de las Ecuaciones Integrales. Versión preliminar
19
( ) ( )VC SC
pQ W W e dv e V d Atejes tρ ρ
ρ
• • • → →∂− + = + + ∗
∂ ∫ ∫
y quedará, expandiendo el valor de la energía específica:
2
( ) ( )2VC SC
V pQ W W e dv e g z V d At iejes tρ ρ
ρ
• • • → →∂− + = + + + + ∗
∂ ∫ ∫ [4.5.3]
La ecuación establece que la razón de cambio con respecto al tiempo del calor agregado al sistema menos el trabajo realizado por el sistema sobre el medio ambiente, mientras está transitando por el volumen de control, es igual a la razón de cambio respecto del tiempo de la energía almacenada en el volumen de control más la razón neta del flujo de energía y del trabajo de flujo debido a esfuerzos normales sobre las superficies de intercambio del volumen de control. Para un flujo ideal, las componentes tangenciales del trabajo de flujo son nulas ya que los esfuerzos de corte no se pone de manifiesto, y solo se producen esfuerzos y trabajos debido a fuerzas normales, quedando:
2
( ) ( )2VC SC
V pQ W e dv e g z V d Aiejes tρ ρ
ρ
• • → →∂− = + + + + ∗
∂ ∫ ∫ [4.5.3b]
Ejemplo 1. Consideremos el flujo permanente en el dispositivo de la Fig. 4.5_4, considerando velocidades promediadas en las áreas de intercambio y por tanto flujo uniaxial. El trabajo del flujo efectuado sobre la hélice es llamado trabajo de eje. Observe lo siguiente:
Fig.4.5_4 1.- El v. de c. se tomó en este caso sobre la pared interior, esto se hace así en los problemas que implican aplicar la Ecuación de la Energía porque debe ponerse de manifiesto al sistema con el volumen de control en t = 0. El trabajo de esfuerzo cortante en las paredes es nulo por el principio de no deslizamiento sobre un volumen de control quieto. 2.- El trabajo de esfuerzo cortante hecho en las áreas de intercambio 1 y 2, o contornos de entrada y salida es nula porque asumimos que el vector velocidad es normal a las superficies de entrada y salida, (es decir coincide con la dirección del versor normal) y por tanto la componente del trabajo de fuerzas tangenciales es nulo sobre esas superficies, también suponemos que las componentes complementarias tangenciales de

M4 INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
MOD 4 Aplicaciones de las Ecuaciones Integrales. Versión preliminar
20
las tensiones normales son despreciables, esto es válido si la viscosidad no es muy alta (1 cp o menor), y si los gradientes de velocidad son bajos en la entrada y salida, en este caso hemos tomado promedios de velocidades para V1 y V2, y por tanto lo estamos considerando flujo uniaxial, (gradiente de velocidad nulo). 3.- Sin embargo, las fuerzas tangenciales que a través del eje salen del volumen de control, a través de la superficie de control, definen en la intersección, una superficie en rotación (la sección del eje) que tiene tensiones y velocidad tangencial como función del radio, y por tanto el trabajo no será nulo en este punto de intercambio, dando lugar al trabajo de eje, que es un tipo de trabajo de tensiones tangenciales. Con estas consideraciones, la ecuación [4.5.3] queda:
∫+
+++=−21
2
)2
( VdAegzVpdt
dWedtdQ
i ρρ
Puesto que el flujo es considerado uniaxial, V, e, ρ son uniformes o medias sobre A1 y A2 y si despreciamos la variación de z sobre estas áreas, pero si la consideramos entre la posición media de la entrada y la salida tenemos:
11111
21
1
122222
22 )
2()
222( VAiegz
VpVAegz
Vpdt
dWdtdQ
ie ρ
ρρ
ρ+++−+++=− [4.5.3b]
como el flujo es permanente, de acuerdo a la ecuación de la continuidad habíamos obtenido:
ρ1 A1 V1 = ρ2 A2 V2 = •
= mdtdm
entonces reemplazado:
dtdmeigz
Vpdtdmeigz
Vpdt
dWedtdQ )
2()
222( 11
21
1
122
22 +++−+++=−
ρρ
Eliminando de ambos miembros d t y dividiendo m. a. m. por dm →
)2
()22
2( 11
21
1
122
22 eigz
Vpeigz
Vpwq e +++−+++=−ρρ
[4.5.3c]
Esta se denomina Ecuación integral de Energía . 4.5.1:- Simplificaciones de la ecuación de energía. 1.- flujo incompresible ρ1 = ρ2 = ρ
2 22 1 2 1
2 1 2 1( ) ( )2
p p V Vq w g z z ei eiejes ρ− −
− = + + − + − [4.5.4d]

M4 INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
MOD 4 Aplicaciones de las Ecuaciones Integrales. Versión preliminar
21
En el caso general debemos considerar el trabajo específico de las fuerzas tangenciales y las expresiones generales quedarían:
2 22 1 1
2 2 1 11
2( ) ( )2 2 2
V p Vpq w w gz ei gz eitejes ρ ρ− − = + + + − + + + [4.5.5]
2 2
2 1 2 12 1 2 1
( ) ( )2
p p V Vq w w g z z e ei itejes ρ− −
− − = + + − + − [4.5.6]
Si definimos a la cantidad ieph +=ρ
como entalpía específica, la ecuación anterior puede escribirse:
2 22 1( ) ( ) ( )2 1 122
V Vq w w g z z h hejes t−
− − = + − + − [4.5.7]
La entalpía especifica tiene como unidad al igual con los demás sumandos, la energía por unidad de masa. [N.m /Kg]. Estas expresiones son muy útiles en la resolución de problemas. 2.- Flujo incompresible + ideal. En este caso, 0, 0wtμ = = o sea viscosidad igual a cero, y esto implica que se hagan nulo el trabajo de las fuerzas tangenciales. A partir de la [4.5.6] quedará:
2 22 1 2 1
2 1 12( ) ( )
2p p V Vq w g z z e eiiejes ρ− −
− = + + − + − [4.5.8]
Cualquier incremento de )12( eiei − es debida a calor q ,intercambiado con el medio ambiente, ya que en este caso no hay rozamiento interno de las partículas del flujo, para gases de una sola fase la energía interna es función únicamente e la temperatura absoluta y se cumple que:
)12(12 TTvceiei −=− 3.- Flujo ideal en proceso adiabático y sin intercambio de trabajo. Si en la evolución del proceso evaluado según las consideraciones anteriores, no hay intercambio de calor con el exterior q = 0 , (el proceso es adiabático) ,si el flujo es ideal (no hay cambio de energía interna debida a rozamiento) y tampoco se intercambia trabajo con el medio ambiente, entonces queda:
0)(2 12
21
2212 =−+
−+
−zzg
VVppρ
[4.5.8]
Esta ecuación vincula los estados en las estaciones de intercambio con el medio ambiente 1 y 2 del volumen de control y se conoce como Ecuación de Bernuolli , dividiendo miembro a miembro por g, , la aceleración de la gravedad, obtenemos otra forma de la ecuación muy utilizada:

M4 INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
MOD 4 Aplicaciones de las Ecuaciones Integrales. Versión preliminar
22
0)(2 12
21
2212 =−+−
+−
zzgVVpp
γ [4.5.8b]
En esta última γ es el peso específico de la sustancia que evoluciona. Observamos que las unidades de la [4.5.8] es [New.m/Kg] ó [m2/seg2] mientras que en la forma [4.5.8b] la unidad es [m]. En particular para el análisis de flujo compresible se utiliza en muchos desarrollos la condición de una evolución isentrópica o sea evolución de un gas en forma adiabática y considerado como un fluido ideal que en general se estudia uniaxial sobre un eje horizontal, en este caso a partir de [4.5.7] el primer miembro resulta cero, quedando:
22
2212
21 hVhV+=+
Problemas Resueltos Aplicando Ecuación Integral de la Energía. Ejemplo 2. En la figura siguiente se muestra una tubería a través de la cual se bombea agua hasta una cota más elevada, las condiciones a la entrada y a la salida se dan en el croquis; se pide hallar la potencia necesaria de la bomba para mantener el flujo.1
Resolución: 1. Consideramos que no hay transferencia de calor. 2. Consideramos el agua como incompresible. 3. Suponemos despreciable el incremento de energía interna del agua en su movimiento
por la tubería, lo que implica considerar en primera aproximación el flujo como ideal. El volumen de control lo seleccionamos tomando el interior de toda la tubería y la bomba y comienza y termina en secciones rectas, donde la información es conocida. El flujo es normal en las secciones 1 y 2 y
allí 0=•
TANW .Obsérvese también que las presiones son absolutas ya que se da el valor de la presion de medio ambiente explícitamente. Tomamos en eje de la tubería inferior como plano referencial para las cotas.
Partimos de la ecuación general de la energía para 0=•
TANW
1 El ejemplo esta tomado de I.Shames, Mecánica de Fluidos.

M4 INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
MOD 4 Aplicaciones de las Ecuaciones Integrales. Versión preliminar
23
)()2
()(
)12()
2(
21
22
2121
1
21
1
122
22
2
2
zzgVVpp
dmdWew
eigzVp
eigzVp
wq
seje
ejes
−+−
+−
==
→+++−+++=−
/ ρ
ρρ
En la expresión general anterior, se consideró un proceso adiabático q = 0, y al no haber trabajo de las fuerzas de fricción viscosa, la energía interna se consideró constante a lo largo del proceso. Reemplazando valores:
22
24
221
22
21900.10781.9101.11.1
0.10.1
1.21.2
mN
kgFN
mcm
cmkgF
BARpp
cmkgF
BARpcmkgF
BARp=⋅⋅==−
==
==
kgmN
mkgmNpp ⋅
==−
9.107/1000
/900.107)( 3
221
ρ
kgmN
KsKg
segmsegmsegmVV ⋅
−=−=−
=−
64.3864.382
)/7.10()/1.6(2 2
22222
21
kgmN
kskg
segm
segmm
segmzzg ⋅
−=−=−=−⋅=− 15.14715.14715.147)15(81.9)( 2
2
2
2
221
Sumando los resultados:
kgmN
kgmN
kgmN
kgmN
dmdWewejes
⋅−=
⋅−
⋅−
⋅== 89.7715.14764.389.107
kgJoulew eje 78−≅
El signo menos indica que el trabajo se ha realizado sobre el volumen de control. a) Cálculo de la potencia de la bomba:
•
===→= sisMejewdtsisMdejewPdtejedWdtsisMddtejedW
ejew ////
O sea P = ( trabajo específico sobre ejes x caudal másico)
Como caudal másico 222111)( AVAVdtdm ρρ ==
Será finalmente:
segJoulem
segm
mkg
kgJouleP 8403)
4)15.0(1.61000(78
2
3 =⋅⋅⋅=π
Como wattseg
Joule= y HPkwwatt 175.0750 ==

M4 INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
MOD 4 Aplicaciones de las Ecuaciones Integrales. Versión preliminar
24
HPHPwattwattHPP 2.11/750/8403)( == Ejemplo 3.- En la etapa de expansión de una turbina de gas entra aire a una velocidad media de 135 m/seg y a una temperatura de T = 870°C, y sale con una velocidad de 225 m/seg, y una temperatura de T=650°C. El flujo másico de aire y gas a través de la turbina es de 0.36 kg/seg; sin tomar en cuenta las pérdidas de calor a través de la carcasa o por fricción del fluido, calcule la trasferencia de energía del aire a la turbina y la potencia que ella puede entregar.1 Resolución: Partimos de la fórmula general de valores no-específicos:
111)2
(222)2
(11
21
1
122
22
2
2 VAugzVpVAugzVpWQ ejes ρρ
ρρ
+++−+++=−••
como por la ecuación de continuidad era:
dtdMMAVAV ===
•
222111 ρρ
queda: ••••
+++−+++=− MugzVpMugzVpWQ ejes )2
()2
(11
21
1
122
22
2
2
ρρ
En nuestro caso, 0=•Q ya que no hay transferencia de calor al exterior, también se cancelan g z2 con g
z1, ya que entrada y salida están al mismo nivel. De la definición de densidad:
vMVolMM
VolM 1
//
===ρ
Siendo v= volumen específico 11=→= v
vρρ
Reemplazando y operando queda: •••
++−++=− MV
uvpMV
uvpW eje )2
()2
(2
1111
22
222
a la cantidad (pv+e) se la hemos denominado “Entalpía específica”, se la representa con “h”, por lo tanto:
1 El ejemplo está tomado de A.Hansen Mecánica de Fluidos.

M4 INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
MOD 4 Aplicaciones de las Ecuaciones Integrales. Versión preliminar
25
••
⎭⎬⎫
⎩⎨⎧ −
+−=− MVVhhW ejes2
)(2
12
212
De la termodinámica sabemos también que para un gas que se aproxima a un gas perfecto 2121 )( hhTTpc −=−
En nuestro caso el calor específico a presión constante Cp para aire vale Cp = 0,240 Kcal / Kg °C, la dilución aire/gas es 50/1 por lo cual en primera aproximación tomamos el Cp como si fuera solamente aire no mezclado. Reemplazando valores queda:
•••
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧ −
+−=⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧ −
+−= MVV
TTCpMVV
hhW eje2
)()(
2)(
)(2
22
121
22
21
21
=⎭⎬⎫
⎩⎨⎧ −
+°−°⋅°
=•
segKg
segmCC
CKgCalW eje 6.13 )
2225135()650870(240
2
222
Para las convenciones tenemos en cuenta lo siguiente: a) 1 cal pequeña = 4,18 Joule
b) kg
Joulekg
mNKgKg
segm
segm
==⋅=.
2
2
2
2
HPHPwatt
wattsW
segJoule
segkg
kgJoule
kgJouleW
segkg
kgJoule
CalJoule
KgCalW
eje
eje
eje
16.98/750
620.73
620.7336.0)200.16704.220(
36.02400.32)18.4800.52(
==
=−=
⎭⎬⎫
⎩⎨⎧
−⋅=
•
•
•
Como 1CV = 75kgF.m/seg es una unidad del sistema técnico, la convención resulta: 1HP=1.013 CV, prácticamente iguales.
CVHPCVHPW eje 5.99013.116.98 =×=
•

M4 INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
MOD 4 Aplicaciones de las Ecuaciones Integrales. Versión preliminar
26
Notas Complementarias. a.-Ecuación Integral de la Cantidad de Movimiento lineal para referencia no - inercial. Cuando las partículas de una región de fluido se mueven referidas a una terna no inercial, por ejemplo, si P es una partícula del campo, estarán sometidas en general a un movimiento acelerado no uniforme introducido por el movimiento de la terna, cuando se observa desde una terna fija, esto se ve en la Fig. a_1 en la cual se ha representado una partícula en un instante dado genérico referida a una terna no - inercial x, y ,z observados desde una terna fija o inercial X,Y,Z.
Fig. a_1 El movimiento genérico de la terna no – inercial quedará definido sobre la terna inercial mediante una traslación R y una rotación instantánea de la terna móvil observada desde la fija, dada por el vector ω, el movimiento instantáneo de la partícula genérica podrá siempre ser descompuesto desde el punto de vista del sistema fijo o inercial mediante una traslación instantánea, vector R y la rotación instantánea, vector ω, de la terna móvil respecto de la fija, si la rotación existe. La velocidad tangencial instantánea de la partícula estará dada por:
..→→→→→→
×=→×=→=∗
rrrVsenrpV ϖϖθϖ Supongamos que la terna solidaria al sistema no inercial x,y,z, sea e1, e2, e3., como estos versores pertenecen al sistema no inercial, la ultima expresión , por tanto será aplicable a ellos con lo cual podemos escribir:
∪→∪
∪→∪
∪→∪
×=
×=
×=
∗
∗
∗
33
22
11
ee
ee
ee
ϖ
ϖ
ϖ
que se pueden escribir de acuerdo a la definición de producto vectorial como:

M4 INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
MOD 4 Aplicaciones de las Ecuaciones Integrales. Versión preliminar
27
∪∪∪→∪
∪∪∪→∪
∪∪∪→∪
−==×=
−==×=
−==×=
∗
∗
∗
2112100321321
33
1331010321321
22
3223001321321
11
eeeee
ee
eeeee
ee
eeeee
ee
ϖϖϖϖϖϖ
ϖϖϖϖϖϖ
ϖϖϖϖϖϖ
Definamos ahora a partir de la Fig. _1 la posición del punto P visto desde la terna fija o inercial:
)3 2 1 (∪∪∪→→→→
+++=+= ezeyexRrRP y la expresión de las velocidades sería:
)3 2 1 ()3 2 1 (•∪
•∪
•∪∪•∪•∪•
•→
•→
•→
•→
++++++=+= exexexezeyexRrRP reemplazando los valores obtenidos para las velocidades de los versores y operando queda finalmente:
→→•→
•→
•→
×++= rrRP ϖ [a .1] Al efecto de simplificar la nomenclatura, nos valemos de la siguiente notación auxiliar:
PDdtPdP
FF
==
→•→
o sea la derivada primera respecto a tiempo referida a la terna fija o inercial del vector
P
PDdtPdr
MM
==
→•→
o sea la derivada primera respecto a tiempo referida a la terna móvil o no- inercial del vector P
Si los orígenes de ambos sistemas coinciden (R =0) tendremos un caso particular para la expresión (na 2.1)que podemos escribir:
→×
→+
→=
→⇒
→×
→+= rrDrDrPDPD MFMF ϖϖ
de la cual podemos definir el operador auxiliar:
][ ×→
+= ϖMF DD que aplicaremos en el desarrollo siguiente. Partiendo de la expresión (na 2.1), de la velocidad de la partícula vista desde la terna fija o inercial, y de la expresión del operador auxiliar, podremos calcular la aceleración de la partícula:

M4 INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
MOD 4 Aplicaciones de las Ecuaciones Integrales. Versión preliminar
28
)()(
)()(
))( ()(
)()(
2
→×
→×
→+
→+×
→+
→×
→++
•→=
=→
×→
+→
×→
+→
×→
+→
+
•→=
=→
×→
+→
×→
++
•→=
=→
×→
+→
+
•→=
rrDrDrDRD
rrDrrDDRD
rrDDRDPDD
rrDDRDPDD
MMMF
MMMF
MMFFF
MFFFF
ϖϖϖϖ
ϖϖϖ
ϖϖ
ϖ
y tomando en cuenta que el tercer término, aplicando las propiedades del producto vectorial es:
→×+
→×
→=
→×
→rDrDrD MMM )()( ϖϖϖ
reemplazando queda:
)()(2)()( 2
→×
→×
→+
→×
→+
→×
→+
→+
•→= rrDrDrDRDPDD MMMFFF ϖϖϖϖ
Entonces en la forma más general la aceleración de un punto correspondiente a una terna no inercial observado desde una terna fija o inercial quedará:
→••
→→→→→•→→→
•→
∗∗→→→
++=⎥⎥
⎦
⎤
⎢⎢
⎣
⎡××+×+×++= ARRMMF aRarrrRaa )( 2 ϖϖϖϖ
La aceleración neta →
Fa para el punto P medida desde la referencia absoluta (XYZ), es igual a la aceleración
neta →Ma medida para la para el punto P desde la terna relativa (x,y,z) más lo contenido en el corchete.
A veces al término dentro del corchete se lo llama aceleración de arrastre, que está compuesto por aceleraciones aparentes, cuando las percibe el observador sobre la terna móvil cuando observa la partícula. La expresión general de la aceleración de la partícula vista desde la terna fija contiene los términos de:
aceleración del origen de coordenadas de la terna móvil, con respecto a la terna fija. aceleración de la partícula percibida por el observador en la terna móvil.
Aceleración angular de la partícula percibida por el observador en la terna móvil1:[→
•→× rω ].
aceleración Coriolis de la partícula :[•→→
× rω2 ].
aceleración central (centrífuga percibida en la terna móvil):[ )(→→→
×× rωω ].
1 Si por ejemplo se estudia la evolución de una partícula en un rio en la Tierra, en referencia a una terna lejana ubicada en las estrellas fijas, este término se cancelaría porque la aceleración angular de rotación de la Tierra es nula.

M4 INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
MOD 4 Aplicaciones de las Ecuaciones Integrales. Versión preliminar
29
Multiplicando en ambos miembros por la masa de la partícula diferencial dm, obtenemos la expresión del principio de Newton para el sistema infinitesimal de una partícula:
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡××+×+×++=
→→→•→→→
•→→
••→→
)( 2 .. rrraRdmadm MF ϖϖϖϖ
que reordenándola queda:
DtPDrdmDadmrrrRdmadm M
MMF
→
===⎥⎥
⎦
⎤
⎢⎢
⎣
⎡××+×+×+−
•→→→→→
•→→→
•→
••→→ )..( .)( 2 . . ϖϖϖϖ
siendo PM la cantidad de movimiento referida a la terna móvil.
Podemos ahora integrar la expresión anterior sobre todos los elementos del sistema, designando, con Fs→
,
la fuerza superficial sobre el sistema y B→
la fuerza másica de campo por unidad de masa., quedando:
)( .)].(2[ .. dvrDtDdvrrrRdvBsF
VV V
ρρϖϖϖϖρ ∫∫ ∫•→→→→→
•→
•→→
••→→→
=××+×+×+−+
Como el volumen de control es solidario a la terna móvil, y fijo respecto de ella y dado que la expresión de la derivada total del segundo miembro la podemos reemplazar por la forma explícita de la ecuación integral para cantidad de movimiento lineal, quedará finalmente la expresión:
)()( .)].(2[ .. ∫ ∫∫ ∫→
∗
→→→→→•→
•→→
••→→→ →
+→
∂∂
=××+×+×+−+VC SC
MMM
VC VC
dAnVVdvVt
dvrrrRdvBsF ρρρϖϖϖϖρ
[a..2] b.- Ejemplo simplificado aplicado al movimiento del cohete. Un cohete según se indica en la figura siguiente, empieza a funcionar desde el reposo, emplazado en forma vertical a la Tierra moviéndose a lo largo de una línea recta vertical, primero en la atmósfera y luego en el espacio exterior.(patm = 0) donde puede despreciarse la resistencia del aire, con respecto a la aceleración de la gravedad, se supondrá que esta disminuye de acuerdo a un modelo de variación
asintótica desde la superficie terrestre dado por: 2][hr
rogg
+= este modelo da que para h = 0 la
aceleración es go=9.81 m/sec2, y para h = ∞, la aceleración es g = 0
En el motor del cohete se queman •
M (Kg/seg) de combustible por unidad de tiempo, y tiene inicialmente una masa Mo. Su masa después de transcurrir un tiempo t, o masa instantánea, será por
tanto: tMMoM•
−= , por esta razón a los problemas de este tipo se los llama problemas de masa variable. La velocidad de eyección de los gases desde la tobera se supone constante y de valor V2 con relación al cohete, cuando en la salida la presión manométrica interior es p2 y la densidad ρ2.

M4 INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
MOD 4 Aplicaciones de las Ecuaciones Integrales. Versión preliminar
30
La velocidad del cohete respecto de la terna inercial se lo designa VR se trata de obtener las ecuaciones del movimiento del cohete respecto de la terna inercial. Desarrollo. Hacemos referencia a las figuras siguientes:
Fig.a _2
Fig.a_3 En la Fig. a_2, re dibujamos el esquema general del codo convergente con una entrada y una salida, para el cual habíamos obtenido aplicando la ecuación de cantidad de movimiento, para la dirección horizontal la expresión:
]1cos2[cos2211 VVMRxApAp −=+−•
θθ [ec1] Esta ecuación esta aplicada a una terna fija exterior al codo, y el volumen de control es exterior a la s de c, las fuerzas exteriores, mantienen al codo quieto, mientras pasa el flujo. En la Fig. a_3, readaptamos la ecuación para el cohete, observamos que ahora no hay entrada de flujo, por lo cual p1=0 , que el cohete no esta “doblado” y que en su salida cos θ =1 que no hay velocidad de entrada, por lo cual V1 = 0.
+

M4 INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
MOD 4 Aplicaciones de las Ecuaciones Integrales. Versión preliminar
31
También ubicamos una terna de referencia sobre el cohete o terna móvil, al efecto que para esta terna el volumen de control, permanezca “fijo”, y sean aplicables las ecuaciones. La aplicación de la ecuación [a.2] , nos dará que para el primer miembro, tomando en cuenta los signos de la terna móvil, y de la terna fija:
0
22
=
−=−=
=
∫ω
ρρ gMvgdvB
ApFs
V
Ahora también consideramos una fuerza inercial que es negativa observada desde la terna móvil:
••−= RMiF
Y para el segundo miembro:
222
2]2][2[)2(2 VMAVAVVdAnVVSC
•→−=−=−=∗∫ ρρρ
reemplazando, quedará:
]2[22 VMgMRMAp•••
−=−− o bien, reordenando:
[ ] 2 22M R gM M V p A•••
+ = + [ec2] Aquí cabe indicar que de acuerdo a lo que se indica en la figura a_3, la referencia fija está puesta en el punto de lanzamiento, con el eje z en la dirección del vuelo del cohete, la pequeña rotación de la terna movil (rotación terrestre trasmitida no se toma en cuenta , y el cohete se desfasará muy lentamente de la vertical, salvo que sea lanzado desde los polos). que poniendo los valores explícitos de la masa y el peso instantáneos, y reordenando queda:
22]2[][22
][ ApVMgtMModt
zdtMMo +=−+−•••
[ec3]
Cabe acotar lo siguiente, cuando el cohete despega en la atmósfera la presión manométrica a la salida es (pe - pat), siendo pe la presión absoluta a la salida de la cámara de combustión , que como se esta liberando a la atmósfera resulta pe = pat , y p2 = 0. Pero en el espacio exterior como no hay atmósfera, quedará activado el último término, con el valor peA2, entonces reescribimos la [ec3]:
]2[][22
][ VMgtMModt
zdtMMo•••
=−+− en la atmósfera
2]2[][22
][ AepVMgtMModt
zdtMMo +=−+−•••
en el espacio exterior

M4 INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
MOD 4 Aplicaciones de las Ecuaciones Integrales. Versión preliminar
32
Dividiendo por la masa instantánea en ambos miembros queda, para el último caso:
][2
][
]2[2
2
tMMo
AepgtMMo
VMdt
zd••
•
−+−
−=
integrando una vez::
CdttMMo
MAepdtgdttMMo
Vdtdz
CdttMMo
AepdtgdttMMo
VMdtdz
+−
+−−
=
→+−
+−−
=
∫∫∫
∫∫∫
•
•
•
••
•
]/{
/2
]/[
]2[
][2
][
]2[
[ec4]
haciendo la sustitución:
dtdudtduutMMo −=→−=→=−
•1]/[
reemplazando en la última de ls [ec4]:
CuduMAepdtg
uduV
dtdz
+−−−= ∫∫∫•
]/2[2
quedando finalmente:
CtgtMMoMAepVVdtdz
+−−⎥⎦⎤
⎢⎣⎡ +−==
••]/[ln]/2[2
cuando t = 0 , V = 0 por lo que:
••+= ]/ln[]/22[ MMoMAepVC
Reemplazando,
gttMMo
MMo
M
AepVV −
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
−+=
•
•
•/
/ln]2
2[ [ec5]
como :
tMMoM•
−= La [ec5] se puede escribir como:
dthr
rog
MMo
M
AepVV
t2][]ln[]2
2[0 +
−+= ∫• [ec6]
velocidad en el instante t desde el despegue, para una condición de vacío, sin considerar la fuerza resistente del aire dentro de la atmósfera.

M4 INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
MOD 4 Aplicaciones de las Ecuaciones Integrales. Versión preliminar
33
A veces se define, velocidad de salida de gas efectiva como:
]22[
•+=
M
AepVc
entonces, la [ec 6] queda:
dthr
rog
MMocV
t2][]ln[
0 +−= ∫ [ec7]
En el espacio exterior, sin influencia de la gravedad, queda:
→= ]ln[MMocV
]/[ cVeMoM −= Partiendo del reposo, el tiempo que es necesario tener el motor cohete encendido para alcanzar una velocidad V se puede calcular a partir de:
])/(1[)()1()()( cVeM
MoMM
Mo
M
MMot −−=−=−
= •••
Otro resultado interesante, puede obtenerse en referencia a la figura siguiente Fig.a_4, en la cual suponemos que si el empuje se corta cuando la velocidad ha alcanzado un valor Vo, a una altura ho y a partir de allí el vuelo continua, perpendicular a la Tierra, en forma inercial, hasta que la gravedad residual lo va desacelerando nuevamente hasta V=0.
Fig. a_4

M4 INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
MOD 4 Aplicaciones de las Ecuaciones Integrales. Versión preliminar
34
La desaceleración instantánea para el tramo de vuelo inercial será:
2][22
hrr
ogdt
hd+
−= [ec8]
Que se puede escribir como:
→+
−====2][2
2
hrrgoV
dhdV
dtdh
dhdV
dtdV
dthd
dhhr
rogVdV 2][
+−=
Integrando en ambos miembros
∫∫∫∫+
−=+
−=+
−=+
−=−hhhh
rh
dhgo
rhr
dhgodhhr
rgodhhr
rgoVoV
00002]1[2][
2][2][2
2
2
2
que se resuelve sustituyendo:
]1[rhu +=
reemplazando, hohr
rogurog
u
durog
u
durogVoV hh
)2(]1
1[2][2][2
2
2
2
00 +−=
−
−−=−=−=− ∫∫
)(22
2
2
2
2
hrrh
ogr
rog
hrr
ogVoV+
−=−+
=−
para h máximo en vuelo inercial, V= 0, por lo que la anterior queda:
22
2
VorogrVoh−
=
de esta se puede calcular la velocidad de escape de la Tierra necesaria , haciendo h = ∞.
segKmsegmmxsegmxrogVoVorog /2.11/180.1131063702/81.922022 ≈===→=−
para la etapa inicial de vuelo acelerado, la distancia recorrida con una aceleración de 5g que es soportable por el cuerpo humano, sería:
aVt
tatoVh
=
= 221
1
reemplazando,

M4 INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
MOD 4 Aplicaciones de las Ecuaciones Integrales. Versión preliminar
35
Kmsegmx
segma
Vh 250.12/5022/22)11180(
2
21 ===
y el tiempo que debe permanecer encendido el motor es:
.2232/50
0000.25.1212 segsegm
mxaht ===
estos resultados se obtuvieron para un despegue desde la Tierra, sin considerar los efectos de resistencia del aire en el primer tramo de unos 80 Km de altura, en esta etapa inicial se trata que la velocidad sea mas baja para minimizar estos efectos, del orden de 100 m/seg, pero como 80 Km es una cifra pequeña con respecto al radio terrestre los valores obtenidos son válidos en primera aproximación. []

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco
MOD 5 Ecuaciones Diferenciales Versión preliminar
1
5 ANÁLISIS DIFERENCIAL. 5.1. Ecuaciones Diferenciales para el tratamiento de un fluido: Con las ecuaciones integrales y el análisis con volúmenes de control se establece la interrelación de un volumen de control fijo, situado en un espacio Euleriano, y de un flujo que pasa por el con el sistema de partículas que ocupa íntegramente el volumen de control en un instante dado, se estudian los cambios de las propiedades en el entorno próximo a la superficie de control, que son macro, como ser fuerzas, torques, trabajo producido dentro del volumen de control, calor intercambiado etc. El procedimiento, soluciona muchos problemas de flujo permanente o permanente uniforme ya sea de flujos ideales o invíscidos y de flujos reales, y que a menudo dan soluciones muy aproximadas con la realidad física, pero su uso es limitado cuando se desea obtener las distribuciones exactas de velocidad y presiones en diferentes puntos de la región interior al v de c. o resolver problemas de distribución de velocidades, presiones o cambios de otras propiedades en el movimiento del fluido en torno a objetos, para lo cual es más útil el análisis a través de las ecuaciones diferenciales. A menudo el conjunto de ecuaciones integrales puede usarse entonces con más éxito en la resolución de problemas de ingeniería, y el conjunto de las ecuaciones diferenciales en la obtención de fórmulas de uso general para determinar diferentes propiedades en puntos del campo de flujo, y permiten visualizar conceptualmente mejor las diferentes simplificaciones que puedan introducirse para el análisis de los diferentes tipos de flujos, como ya se dijo obtener distribuciones de velocidades y presiones en torno a objetos embestidos por flujos abiertos o distribuciones de velocidad en flujos cerrados como ser conductos y canales.
Cuando se comparan las técnicas de uso de las ecuaciones diferenciales con respecto a las de volumen de control, puede decirse que se trata de métodos a escala reducida. Las ecuaciones de mecánica de fluidos aparecen en su forma final como Ecuaciones Diferenciales y se realiza un “Análisis diferencial” de los problemas de flujo. La obtención del set de ecuaciones diferenciales para abordar un problema no es difícil, se deben usar ecuaciones que representen los principios básicos, los secundarios, las condiciones de borde particulares, y los principios direccionales. Una forma de obtenerlas, es haciendo un análisis directo a partir de un volumen de control diferencial, en otros casos puede tomarse un atajo usando algunos teoremas del cálculo vectorial para llegar a las formas diferenciales a partir de las formas integrales ya obtenidas antes. Sin embargo la resolución de estos sistemas de ecuaciones diferenciales en derivadas parciales y en general no lineales, no es fácil ni directo salvo con esquemas e hipótesis de simplificación grandes, que a veces nos ponen fuera del problema real que se está estudiando. Actualmente, con la posibilidad de utilización de computadores de gran capacidad, es posible aplicar técnicas de análisis numérico mallando en forma finita el campo de flujo en estudio, y resolviendo las ecuaciones diferenciales en los nodos por incrementos finitos, ya que se transforman así en sistemas de ecuaciones algebraicas, estas técnicas forman parte de una rama reciente de la M de F, que se denomina: CFD (Computational Fluid Dynamics). Cuando el análisis del flujo se conforma con más de un modelo superpuesto y con límites difusos entre ellos, por ejemplo los problemas con capa límite, la resolución con CFD se torna compleja, el análisis diferencial no aporta soluciones (por ser insuficientes las ecuaciones o porque la resolución de los sistemas en derivadas parciales no lineales no es posible); y debido a que el análisis integral da resultados

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco
MOD 5 Ecuaciones Diferenciales Versión preliminar
2
globales no puntuales y es mas apto para flujos interiores; es necesario recurrir a un tercer tipo de análisis que se denomina análisis experimental. Aquí los resultados puntuales y globales se obtienen a partir de las magnitudes medidas en los experimentos con modelos ensayados por ejemplo en túneles aerodinámicos o hidrodinámicos, usando balanzas especiales, sondas, marcadores de trazas etc. que permiten medir propiedades en puntos específicos del campo de flujo. Este método de análisis tiene también sus problemas propios, por ejemplo cumplir con la igualdad de varios parámetros llamados números adimensionales que intervienen para algunos modelos y la imposibilidad en ciertos casos de reproducir en el ensayo con modelos las condiciones de flujo sobre los objetos reales, lo analizaremos en el [Mod. 8] un poco más detalladamente. Aquí vamos a deducir solamente la ecuación diferencial de la continuidad y de la cantidad de movimiento lineal para flujo ideal, que son las más fáciles de resolver y aplicar. Los resultados del análisis vectorial que aplicaremos para la obtención de las ecuaciones diferenciales a partir de las ecuaciones integrales ya obtenidas, son los siguientes: El teorema de la divergencia o de Gauss:
∫ ∫→→→
=∗A V
dvAdivdAA donde→
A es un campo vectorial genérico [5.1.1]
El teorema del Gradiente:
∫∫ =→
VA
dvgradAd φφ donde φ es ujn campo escalar genérico [5.1.2]
Definiciones de los Operadores: gradiente, divergencia y rotacional: Si:
),,( zyxAA→→
= es una función vectorial o campo vectorial ),,( zyxφφ = es una función escalar o campo escalar
Se define operador gradiente: )( kz
jy
ix
grad∂∂
+∂∂
+∂∂
=∇=
El gradiente aplicado a una función escalar, da una magnitud vectorial:
kz
jy
ix
grad∂∂
+∂∂
+∂∂
=∇=φφφφφ
La divergencia es el producto escalar del operador gradiente con un vector o campo vectorial y da una magnitud escalar:
kA
yA
xAkAjAiAk
zj
yi
xAAdiv
∂∂
+∂∂
+∂∂
=++∗∂∂
+∂∂
+∂∂
=∗∇=→→ 321
321 )()(
El rotacional es el producto vectorial del operador gradiente y un vector de componentes A1, A2, A3, o campo vectorial ,como resultado de un vector u otro campo vectorial.

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco
MOD 5 Ecuaciones Diferenciales Versión preliminar
3
kyA
xAj
xA
zAi
zA
yA
AAAzyx
kjiAArot )()()(/// 123123
321
∂∂
−∂∂
+∂∂
−∂∂
+∂∂
−∂∂
=∂∂∂∂∂∂=×∇=→→
Operadores vectoriales en coordenadas cilíndricas:
∪∪∪
∂∂
+∂∂
+∂∂
==∇ zez
erre
rgrad φ
θθ
φφφφ 1
zNz
rN
rrrNr
rNdivN
∂∂
+∂
∂+
∂∂
==∗∇→→ )(1)(1)(1
θθ
NzrNNrzr
rzee
rre
NrotN
θ
θ
θ
∂∂
∂∂
∂∂
==×∇
∪∪∪
→→
Laplaciana en coordenadas cilíndricas
⎥⎦⎤
⎢⎣⎡∂∂
+⎥⎦⎤
⎢⎣⎡∂∂
+⎥⎦⎤
⎢⎣⎡
∂∂
∂∂
=∇ 22
22
2112
zrrr
rrφ
θ
φφφ
Otras identidades importantes son:
0)( =×∇∗∇=→→AArotdiv [5.1.3]
0)( =∇×∇= φφgradrot [5.1.3b]
φφφ )()( gradAAdivAdiv ∗+=→→→
[5.1.3c]
En las anteriores, Φ es un campo escalar. Φ(x,y,z,t), y ),,,( tzyxfA =→
, un campo vectorial. 5.2 Ecuación Diferencial de la Continuidad:
Partimos de la Ecuación. de Transporte de Reynolds, aplicada a la conservación de masa o Ecuación. de continuidad, y le aplicamos el resultado del teorema de Gauss:
→=⎥⎦
⎤⎢⎣
⎡+
∂∂
→=+∂∂
=∗+∂∂
∫ ∫∫
∫∫→→
→→
0)(0)()(
0
dvVdivt
dvVdivdvt
dAVdvt
VC VCVC
SCVC
ρρρρ
ρρ

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco
MOD 5 Ecuaciones Diferenciales Versión preliminar
4
0)( =+∂∂ →
Vdivt
ρρ [5.2.1]
Esta se denomina Ecuación diferencial de la continuidad según Euler para un punto del campo, aplicando la identidad vectorial 5.1.3c queda:
⇒=∗∇+∇∗+∂∂
=∗∇+∂∂
=+∂∂ →→→→
0)()()( VVt
Vt
Vdivt
ρρρρρρρ
→
⇒−=∗+∂∂ VdivgradV
tρρρ )(
→
−= VdivDtD ρρ
[5.2.1b]
Que es la Ecuación de continuidad siguiendo a la partícula dentro del campo según Lagrange. Si el flujo es permanente, a partir de [5.2.1] queda:
0)( =→
Vdiv ρ [5.2.1b] Y si además el flujo es incompresible la densidad es una constante que puede sacarse del operador divergencia y anularse con el cero del segundo miembro, por tanto para flujo permanente e incompresible la ecuación diferencial de continuidad quedará:
0=→
Vdiv [5.2.1c]
El producto )(→→
= VD ρ , se lo denomina a veces, “densidad de flujo de corriente” y no debe confundirse con el operador derivada total., su unidad es [kg/m3][m/seg] = [Kg/m2.seg] o sea es la variación de masa neta que atraviesa una superficie en la dirección de la velocidad, en un punto del campo, por unidad de tiempo. 5.3 Ecuación diferencial de la cantidad de movimiento lineal: Aquí el análisis se hace a partir de un sistema de tamaño diferencial. La cantidad de movimiento lineal
definida con la variable →P , para el seguimiento de una partícula está definida por la relación:
)()( )( dvVtD
DdmVtD
DFdtDsistMVD
tDPDF ρ
→→→→→
→
=⋅=→⋅
==
Como dm = ρ dv es constante para el sistema, ahora de tamaño diferencial, en virtud del principio de conservación de masa podemos escribir la expresión anterior como:
])([tVVgradVdv
DtVDdvFd
∂∂
+∗==
→→→
→→
ρρ
y que para un volumen discreto de sistema será:

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco
MOD 5 Ecuaciones Diferenciales Versión preliminar
5
V[( ) ]tVOL
F V grad V dvρ→
→ → → ∂= ∗ +
∂∫ [5.3.1]
En el primer miembro, la fuerza total puede ser desglosada en las fuerzas concurrentes.
Asumimos primero que no hay fuerzas tangenciales 0Ft→
= O sea nuestras consideraciones son para fluido no viscoso o Ideal, solamente consideramos, las fuerzas másicas y las fuerzas normales, entonces: a.- Fuerzas másicas:
VOL
mF f dv→ →
= ∫
siendo →
f la fuerza másica por unidad de volumen. (si solamente consideramos la existencia de fuerzas
provenientes del campo gravitatorio →→
= γf o sea es igual al peso específico, en general podrían estar presentes otras fuerzas de campo adicionales como magnéticas, eléctricas o aceleraciones del campo en otras direcciones, en nuestro caso solamente consideraremos que las fuerzas másicas provienen del campo gravitatorio). b.- Fuerzas superficiales:
AsF p d A
→ →
= −∫
Aplicando el teorema del gradiente, a la expresión anterior:
A VOL
F p d A grad p dvs→ →
= − = −∫ ∫
Igualando con la expresión [5.3.1]:
∫ ∫ ∫→→
→→
∗+∂∂
=−VOL VOL VOL
dvVgradVtVpdvgraddvf ρ])([
De donde surge la expresión de la ecuación diferencial para un volumen diferencial,
simplificando dv,
( )Vf grad p V grad Vt
ρ→
→ → →⎡ ⎤∂⎡ ⎤ ⎢ ⎥− = + ∗⎢ ⎥ ⎢ ∂ ⎥⎣ ⎦⎣ ⎦
[5.3.2]
Si las fuerzas de campo provienen solamente de la gravedad :
dvVgradVtVdvpgradf ρ
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡∗+
∂∂
=⎥⎦⎤
⎢⎣⎡ −
→→→
→)(

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco
MOD 5 Ecuaciones Diferenciales Versión preliminar
6
zgradgkgf ρρ −=−=→→
y como:
→→→→−=
∂∂
+∂∂
+∂∂
−=− kgkzzj
yzi
xzgzgradg ρρρ )(
entonces reemplazando en la [5.3.2] y dividiendo en ambos miembros por ρ:
1 ( )Vg grad z grad p V grad Vtρ
→→ →∂
− − = +∂
i
Reordenando:
1( ) DV V V grad V grad p g grad zDt t ρ
→ →→ →∂
= + = − −∂
i [5.3.3]
La [5.3.3] se denomina Ecuación de Euler y que para flujo permanente será:
1 ( ) DV V grad V grad p g grad zDt ρ
→→ →
= = − −i [5.3.4]
5.4..- Corolarios de la Ecuación de Euler. Aceptamos también por ahora la identidad siguiente la que se demuestra al final en las Notas Complementarias.
→→→
→→
×−=∗ VrotVVgradVgradV ]2
2[ ][ [5.4.1]
entonces la [5.3.4] puede escribirse como
2 1 [ ]2
Vgrad V rotV grad p g grad zρ
→→ →
− × = − − [5.3.4b]
y puede verse que en la expresión general [5.3.4] existe un término implícito que involucra al rotacional de velocidades del campo. Corolario 1. Aplicación de la Ecuación de Euler entre dos puntos de una línea de corriente. Primero observamos que si hay líneas de corriente establecidas, el flujo es permanente. Si la ecuación [5.3.4] se expresa según una coordenada intrínseca s, definida sobre la línea de corriente, queda :
1VV grad p g grad zs ρ
→→ ∂∗ = − −∂
[5.3.4c]

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco
MOD 5 Ecuaciones Diferenciales Versión preliminar
7
Si tomamos ahora un desplazamiento entre dos puntos sobre la línea de corriente, por supuesto tendrá la
dirección ds→
, y lo multiplicamos escalarmente con la [5.3.4c], queda para los términos del segundo miembro:
grad p ds dp→
∗ = (variación diferencial de la presión a lo largo de la l. de c.)
grad z ds dz→
∗ = (cambio diferencial de elevación a lo largo de la l.de c.)
y como para el primer miembro V→
y Vs
→
∂∂
tienen la misma dirección, resulta:
2[ / 2] 2 [ / 2]V V V V VV V V ds V s s d Vs s s s s
→→ →∂ ∂ ∂ ∂ ∂∗ = → ∗ = ∂ = ∂ =∂ ∂ ∂ ∂ ∂
reorganizando la [5.3.4c] queda:
2[ ] 0
2dp Vd g dzρ+ + =
O sea que en la forma general de la Ecuación de Euler, cuando incluye el término solenoidal y uno rotacional , deviene en la Ecuación de Bernuolli que es válida solamente entre dos puntos de una misma línea de corriente. Al realizar la integración:
2[ ]
2dp V g zρ+ + =∫ [5.4.2]
la expresión resultante podrá integrarse, ya sea que ρ sea una función de la presión , como en el caso por ejemplo de los gases ideales, u otra función definida, en general un fluido que cumple con esto se denomina Barotrópico. La otra posibilidad es que el fluido se considere incompresible ρ = cte , dando lugar a la ecuación de Bernuolli ya conocida:
2[ ]
2p V g zρ+ + =
El valor de la constante en este caso varía de una línea de corriente a otra. Corolario 2. Flujo permanente e irrotacional, aplicación de la Ecuación de Euler entre dos puntos cualquiera del campo.
Si, 0=→Vrot , no obstante haber considerado flujo ideal, ahora excluimos específicamente la
rotacionalidad que podría estar presente debida a la presencia de singularidades en el seno de un flujo ideal; entonces la [5.4.1] queda:

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco
MOD 5 Ecuaciones Diferenciales Versión preliminar
8
y reemplazando este resultado en la Ecuación de Euler [5.3.4] queda:
→=++ 0 1]2
2[ zgradgpgradVgrad
ρ
donde:
22 VVVV =∗=→→→
Tomemos ahora un desplazamiento genérico dentro del campo:
→→→→++= kdzjdyidxrd
y multipliquemos escalarmente la ecuación de Euler por este desplazamiento:
)2
2()
2
2(
z
VdrdVgrad
dzrdgrad
dprdpgrad
=∗
=∗
=∗
→→
→
→
reemplazando:
0)22( =++ dzg
dpVdρ
que integrada queda, igual que antes:
CtezgdpV=++ ∫ ρ2
2 [5.4.2]
Hasta ahora la hipótesis para el corolario , fue la de flujo ideal o no viscoso, e irrotacional en la [5.4.2] se considera que el flujo puede ser compresible, (ρ ≠ cte). Como ya dijimos, si la densidad se puede expresar como función de la presión ρ = f(p), condición que se llama de flujo barotrópico, la integral que involucra a la presión podrá calcularse, por ejemplo para los gases ideales en condiciones de flujo adiabáticas, en que p y ρ están vinculadas por la ecuación de estado. Otro caso particular es si la densidad se considera constante, por tanto independiente de la presión, (líquidos en general), en que podrá sacarse de la integral como una constante, la [5.4.2] integrada quedará:
CtezgpV=++
ρ2
2
]2
2[ ]
2
2[ ][
→→→
→→→
=×−=∗VgradVrotVVgradVgradV

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco
MOD 5 Ecuaciones Diferenciales Versión preliminar
9
Obtenemos nuevamente la Ecuación de Bernoulli pero que en este caso es válida para flujo ideal, sin rotación y permanente entre dos puntos cualquiera del campo separados incluso entre distintas líneas de
corriente, ya que el desplazamiento →rd fue arbitrario. La constante es única para todo el campo.
5.5.- Ecuación diferencial de la cantidad de movimiento lineal, para el caso general. Volvemos a escribir aquí la Ec. [5.3.3]:
zgradgpgradtVVgradV
DtVD
−−=∂∂
+∗=
→→→
→
1 )( ρ
la hipótesis para su deducción fue que el fluido era ideal o sea no existían esfuerzos tangenciales, y que podía o no haber una rotacionalidad matemática sobre impuesta en el campo de flujo; en general para un flujo real donde si existen esfuerzos tangenciales la ecuación toma la forma:
zgradggradpgradtVVgradV
DtVD
−−−=∂∂
+∗=
→→→
→
τρρ1 1 )( [5.3.3 b]
Donde aparecen explícitamente las tensiones tangenciales que se expresan en función de la velocidad y la viscosidad para flujos newtonianos puros, y además si se consideran no nulas las fuerzas inerciales, la anterior queda:
zgVVptVVgradV
DtVD
∇−∇+∗∇∇+∇−=∂∂
+∗=→→
→→→
→
)]2()(31 [1 1 )( μμ
ρρ [5.3.3.c]
La obtención de la [5.3.3b] y el pasaje de la [5.3.3b] a la [5.3.3c] no es directo sino que implica varios pasos matemáticos, y la utilización de algunas consideraciones de la mecánica del continuo, la [5.3.31c] se conoce con el nombre de Ecuación de Navier Stokes, representa la aceleración de una partícula fluida, debida a las fuerzas por unidad de masa de las componentes normales, tangenciales inerciales y másicas, (fuerza por unidad de masa de la partícula en un campo conservativo gravitatorio), el primer miembro es la aceleración de la partícula observada en su movimiento libre respecto a una terna inercial, por lo cual la Ecuación de Navier Stokes no es más que la expresión de la segunda ley aplicada a la partícula fluida. Cuando se expresa en sus componentes cartesianas la [5.3.3c], representa un sistema de tres ecuaciones diferenciales no lineales en derivadas parciales, que presentan cuatro funcionales incógnita p, Vx, Vy, Vz. es decir la distribución de la presión en el campo y las tres componentes de la velocidad, o sea cuatro funciones del campo incógnitas con tres ecuaciones, la cuarta ecuación para completar el grupo resolutivo es la ecuación diferencial de la continuidad [5.2.1]. Solamente algunos pocos problemas de la mecánica de fluidos reales en movimiento, pueden simplificarse para obtener soluciones explicitas a partir de la resolución de este sistema de ecuaciones, en la mayoría de los casos no pueden obtenerse soluciones exactas y hay que apelar a simplificaciones importantes o bien al análisis numérico computacional o pruebas empíricas.

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco
MOD 5 Ecuaciones Diferenciales Versión preliminar
10
5.5.- Interpretación Física de los operadores Divergencia y Rotacional. 5.5.1.- Divergencia. En la figura 5.5_1, se representa un pequeño volumen de control fijo del espacio referido a una terna inercial que vamos a suponer inmerso en un campo de velocidades fluido al que observamos en un instante t, la matriz de velocidades en las posiciones para ese instante, suponemos solamente dependiente
de la posición en el campo: ),,( zyxV→
, ya que el tiempo fue congelado como en una fotografía. En dicho volumen, el fluido está entrando y saliendo a través de las caras, para el análisis nos basamos en el principio de conservación de masa o sea: [Velocidad de acumulación] = [Velocidad de entrada] - [Velocidad de salida] de materia dentro del volumen de materia de materia
Fig.5.5_1
Si ),,( zyxV→
representa el campo de velocidades, de la región y ),,( zyxρ representa el campo escalar de densidad de la misma, recordamos la definición de la función vectorial:
),,(),,(),,( zyxVzyxzyxDD→→→
== ρ Que denominamos densidad de flujo de corriente, y su unidad, será ⎥
⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡⎥⎦⎤
⎢⎣⎡
segmKg
segm
mKg
23
la misma nos define, cuanta masa circula por el punto (x,y,z), en la dirección →
V por unidad de área
normal a la velocidad y de tiempo. La cantidad de la propiedad →
D que entra en el pequeño volumen de control por unidad de tiempo en la dirección x será:
∪→
ΔΔ∗ izyzyxD )(),,( y la que sale por la cara opuesta:
∪→
ΔΔ∗Δ+ izyzyxxD )(),,(

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco
MOD 5 Ecuaciones Diferenciales Versión preliminar
11
Entonces el balance neto en la dirección x es, teniendo en cuenta los signos de las normales a las caras:
)(),,()](),,()(),,([ zyzyxxDizyzyxDzyzyxxD ΔΔΔ=ΔΔ∗−ΔΔ∗Δ+∪→→
[Kg/seg] Repitiendo lo mismo para las otras dos caras, queda:
)(),,()](),,()(),,([ zxzyxDyjzxzyxDzxzyyxD ΔΔΔ=ΔΔ∗−ΔΔ∗Δ+∪→→
)(),,()](),,()(),,([ yxzyxDzkyxzyxDyxzzyxD ΔΔΔ=ΔΔ∗−ΔΔ∗Δ+∪→→
El cambio total de masa por unidad de tiempo dentro del pequeño volumen, es la suma de las tres expresiones, y el cambio total de masa por unidad de volumen y de tiempo será la suma dividida por el mesovolumen: Δv = (ΔxΔyΔz) lo que nos dará:
zyxzyzyxzDzyzyxyDzyzyxxD
ΔΔΔΔΔΔ+ΔΔΔ+ΔΔΔ )(),,()(),,()(),,(
operando, queda:
zzyxzD
yzyxyD
xzyxxD
ΔΔ
+Δ
Δ+
ΔΔ ),,(),,(),,(
que en el límite cuando Δv → 0, nos dará:
→
=∂
∂+
∂∂
+∂
∂ Ddivz
zyxzDy
zyxyDx
zyxxD ),,(),,(),,(
Es decir podemos asociar físicamente el concepto de divergencia con el cambio del parámetro en un punto
del campo y el tiempo. En este caso el parámetro es →→
= VD ρ , si
0>→
Ddiv significa que del pequeño volumen vδ , salen más partículas que las que ingresan, y el fluido se descomprime, entonces para el volumen de control diferencial se dice que hay “divergencia de materia”.
Si: 0<→
Ddiv lo opuesto, entran más partículas fluidas de las que salen y el volumen de control diferencial se comprime.
En el caso que 0=→
Ddiv , la misma cantidad que sala es la que ingresa, y la densidad permanece constante. 5.5.2.- Divergencia en presencia de Singularidades. Dos tipos de singularidades pueden considerarse, aparte de lo ya expuesto dentro del volumen diferencial que encierra el punto, Fuente o manantial, que agrega partículas fluidas externas al espacio de flujo interior en el punto, y sumidero o pozo que quita partículas en el punto para trasladarlas fuera del espacio interior. Debe considerarse que las singularidades son entidades independientes del campo.
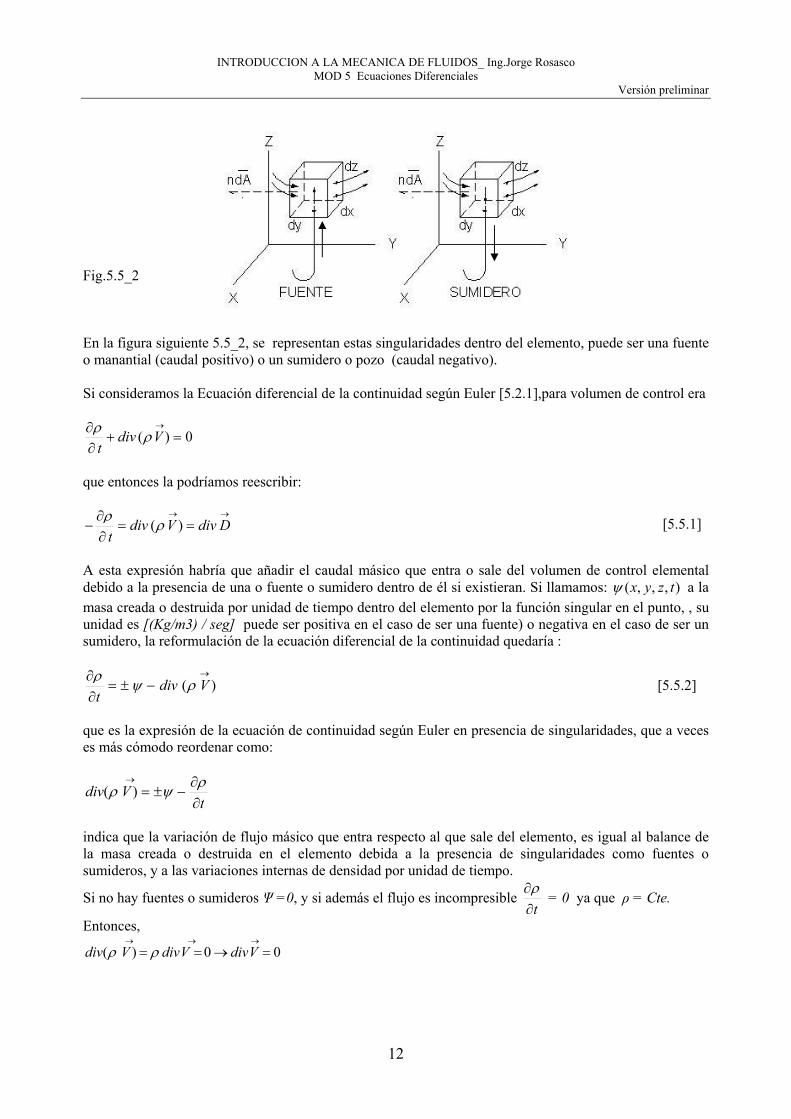
INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco
MOD 5 Ecuaciones Diferenciales Versión preliminar
12
Fig.5.5_2 En la figura siguiente 5.5_2, se representan estas singularidades dentro del elemento, puede ser una fuente o manantial (caudal positivo) o un sumidero o pozo (caudal negativo). Si consideramos la Ecuación diferencial de la continuidad según Euler [5.2.1],para volumen de control era
0)( =+∂∂ →
Vdivt
ρρ
que entonces la podríamos reescribir:
→→
==∂∂
− DdivVdivt
)(ρρ [5.5.1]
A esta expresión habría que añadir el caudal másico que entra o sale del volumen de control elemental debido a la presencia de una o fuente o sumidero dentro de él si existieran. Si llamamos: ),,,( tzyxψ a la masa creada o destruida por unidad de tiempo dentro del elemento por la función singular en el punto, , su unidad es [(Kg/m3) / seg] puede ser positiva en el caso de ser una fuente) o negativa en el caso de ser un sumidero, la reformulación de la ecuación diferencial de la continuidad quedaría :
)(→
−±=∂∂ Vdiv
tρψρ [5.5.2]
que es la expresión de la ecuación de continuidad según Euler en presencia de singularidades, que a veces es más cómodo reordenar como:
tVdiv
∂∂
−±=→ ρψρ )(
indica que la variación de flujo másico que entra respecto al que sale del elemento, es igual al balance de la masa creada o destruida en el elemento debida a la presencia de singularidades como fuentes o sumideros, y a las variaciones internas de densidad por unidad de tiempo.
Si no hay fuentes o sumideros Ψ =0, y si además el flujo es incompresible t∂
∂ρ = 0 ya que ρ = Cte.
Entonces,
00)( =→==→→→
VdivVdivVdiv ρρ

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco
MOD 5 Ecuaciones Diferenciales Versión preliminar
13
Esto se corresponde a un flujo permanente e incompresible es decir en un volumen de control todo el flujo que entra luego sale. También podemos escribir la ecuación de continuidad según Lagrange, en la que establecemos el cambio de densidad de una partícula en su trasporte a través del espacio de flujo, como la partícula no puede perder o ganar masa el cambio de densidad en este caso se debe a cambios en el volumen, pero el cambio de masa se podría producir en este caso si el diferencial de volumen pasa a través de una singularidad. Lo que permite escribir la ecuación de continuidad según Lagrange, es decir haciendo un seguimiento instantáneo de la masa cuando transita dentro del volumen de control, o libremente en el campo.
ψρψρρ±−=±∗∇−=
→→VdivV
DtD )( [5.5.3]
Esta expresión es igual a la [5.2.1b] salvo que se agrega la variación de densidad másica debida a las eventuales singularidades presentes en el campo. 5.5.3.- Rotacional. Supongamos ahora en referencia a la Fig.5.5_3 que el campo está constituido de partículas fluidas que
giran en torno al eje z con velocidad →V , la velocidad angular está relacionada con la velocidad de cada
partícula a través de : →→
= ωaV , y el vector posición respecto a la terna inercial , que es una función vectorial del tiempo, se puede definir como:
→→→→++= kzjtaitar ωω sincos
por tanto:
sin cos 0d rV a t i a t j k y i x jdt
ω ω ω ω ω ω→
→ → → → → →
= = − + + = − +
Fig.5.5_3 entonces el rotacional de este campo de velocidad sería:

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco
MOD 5 Ecuaciones Diferenciales Versión preliminar
14
→→→→
===
−∂∂
∂∂
∂∂
= qk
xyzyx
kji
Vrot ωω
ωω
22
0
La partícula genérica gira en torno a z como un cuerpo rígido con una velocidad angular ω, al vector →ω
lo llamamos vector torbellino , y al vector →q vector vorticidad.
El valor del rotacional del campo de velocidades en la posición de la partícula es →ω2 o sea podemos usar
a →Vrot como medida del efecto local de rotación del punto, y el campo es irrotacional cuando
→Vrot = 0
. Con respecto al vector vorticidad, y si es diferente de cero, decimos que hay vorticidad en el punto. Un pequeño molinete colocado con eje paralelo a z en el punto, rotará si en el punto hay vorticidad distinta de cero y no lo hará en cualquier otro caso, por ejemplo si la partícula se traslada sin rotar en una trayectoria circular, o sea tiene circulación.1
El valor →ω2 puede interpretarse físicamente observando que la partícula está rotando una vez respecto al
eje z con velocidad angular ω positiva y otra sobre si misma con velocidad y sentido de ω también positiva , para “mirar” el centro de rotación, sería como la Luna rotando en torno a la Tierra de la cual vemos una sola cara. Recíprocamente una hamaca de “la vuelta al mundo” tendría circulación pero no vorticidad porque los sentidos de las velocidades angulares sobre la “partícula”son opuestas y se cancelan, entonces solamente hay una traslación sobre una trayectoria circular. Cada punto interior al círculo de trazos en la Fig.5.5_3, tendrá idéntica vorticidad y habrá una rotación rígida de todos los puntos , los que no cambiaran sus posiciones relativas, a esta situación se la denomina núcleo rígido de torbellino, veremos esto en más detalle en el Mod .6. Notas Complementarias. 5.5.4.- Demostraremos aquí la propiedad vectorial [5.1.3c]:
φφφ )()( gradAAdivAdiv ∗+=→→→
Primero expandimos el primer miembro:
=⎥⎦⎤
⎢⎣⎡ ++∗∇=⎥⎦
⎤⎢⎣⎡ ++
∪∪∪∪∪∪
kzyxzAjzyxyAizyxxAkzAjyAixAzyxdiv ),,(),,(),,()(),,( φφφφ
[ ] [ ] [ ]),,(),,(),,( zyxzAz
zyxyAy
zyxxAx
φφφ∂∂
+∂∂
+∂∂
1 Definiremos el concepto de circulación en el Módulo 6, Rotacionalidad y Vorticidad.

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco
MOD 5 Ecuaciones Diferenciales Versión preliminar
15
Tome en cuenta que las funciones [ ]),,( zyxxA φ , [ ]),,( zyxyA φ , [ ]),,( zyxzA φ , son también funciones
de f(x. y, z).entonces la resolución de las derivadas parciales se hacen como derivadas de los productos de dos funciones y queda:
⎥⎦⎤
⎢⎣⎡
∂∂
+⎥⎦
⎤⎢⎣
⎡∂∂
+⎥⎦
⎤⎢⎣
⎡∂
∂+⎥
⎦
⎤⎢⎣
⎡∂∂
+⎥⎦⎤
⎢⎣⎡
∂∂
+⎥⎦⎤
⎢⎣⎡∂∂
zzyx
zAzyxzzA
yzyx
yAzyxyyA
xzyx
xAzyxxxA
),,(),,(
),,(),,(),,(),,(
φφ
φφφφ
Reagrupando:
=⎥⎦⎤
⎢⎣⎡
∂∂
+∂∂
+∂∂
∗+⎥⎦
⎤⎢⎣
⎡∂∂
+∂∂
+∂∂ ∪∪∪→
),,(),,( zyxkx
jx
ix
Az
Azy
Ayx
Axzyx φφ
φφ )( gradAAdiv ∗+→→
Y obtenemos la igualdad con el segundo miembro de [5.1.3c], con lo que queda probada la propiedad vectorial. 5.5.5.- Demostraremos aquí la [5.3.4b] que indicaba:
→→→
→→
×−=∗ VrotVVgradVgradV )2
2( )(
Que es la forma 2 de la Ec. de Euler, para ello consideremos que:
=∂∂
+∂∂
+∂∂
+
∂∂
+∂∂
+∂∂
+∂∂
+∂∂
+∂∂
=∂∂
+∂∂
+∂∂
=∗
→
→→→→→
→→
kz
VzVzy
VzVyx
VzVx
jz
VyVzy
VyVyx
VyVxiz
VxVzy
VxVyx
VxVxzVVz
yVVy
xVVxVgradV
)(
)()()()(
Desarrollamos primero, el primer término del segundo miembro de la Ec de Euler (Forma2):
=⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
∂∂
+∂
∂+
∂∂
+⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
∂∂
+∂
∂+
∂∂
+⎭⎬⎫
⎩⎨⎧
∂∂
+∂
∂+
∂∂
=
∗=
=∂
∂+
∂∂
+∂
∂=
→→→
→→→→
kz
zVz
Vyz
xV
jy
zVy
Vyy
xVix
Vzx
Vyx
Vx
VVV
kz
Vjy
Vix
VVgrad
)2/()2/()2/(
)2/()2/()2/( )2/()2/()2/(
2 que cuentaen tomemosaqui
)2/()2/()2/()2
(
222
222222
2222
Ahora desarrollamos el segundo término:

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco
MOD 5 Ecuaciones Diferenciales Versión preliminar
16
=
∂∂
−∂∂
∂∂
−∂∂
∂∂
−∂∂=×
→→
)()()(y
Vxx
Vyx
Vzz
Vxz
Vyx
VzVzVyVxkji
VrotV
⇒⎭⎬⎫
⎩⎨⎧
∂∂
−∂∂
−∂∂
−∂∂
+⎭⎬⎫
⎩⎨⎧
∂∂
−∂∂
−∂∂
−∂∂
+⎭⎬⎫
⎩⎨⎧
∂∂
−∂∂
−∂∂
−∂∂
=
kz
Vyy
VzVyx
Vzz
VxVx
jy
Vxx
VyVxz
Vyy
VzVz
ix
Vzz
VxVzy
Vxx
VyVy
)()(
)()(
)()(
kz
Vyy
VzVyz
Vxx
VzVx
jy
Vzz
VyVzy
Vxx
VyVx
ix
Vzz
VxVzx
Vyy
VxVy
VrotV
⎭⎬⎫
⎩⎨⎧
∂∂
−∂∂
+∂∂
−∂∂
+⎭⎬⎫
⎩⎨⎧
∂∂
−∂∂
+∂∂
−∂∂
+⎭⎬⎫
⎩⎨⎧
∂∂
−∂∂
+∂∂
−∂∂
=×−→→
)()(
)()(
)()(
Comparando la igualdad componente a componente, por ejemplo para la componente en i , tenemos:
=⎭⎬⎫
⎩⎨⎧
∂∂
−∂∂
+∂∂
−∂∂
+∂∂
+∂∂
+∂∂
=∂∂
+∂∂
+∂∂
)()()2/()2/()2/(
)()()(
222
xVz
zVxVz
xVy
yVxVyVz
xVy
xVx
x
zVxVz
yVxVy
xVxVx
Desarrollando:
)()()()(x
VzVzz
VxVzx
VyVyy
VxVyx
VzVzx
VyVyx
VxVx∂∂
−∂∂
+∂∂
−∂∂
+∂∂
+∂∂
+∂∂
Con lo cual se cumple la igualdad para la componente i , análogamente se verifica para j y k ; por tanto resulta válida la identidad vectorial:
→→→
→→→→
×−=∗+= VrotVVgradVgradVdtVd
DtVD )
2
2( )(
[]
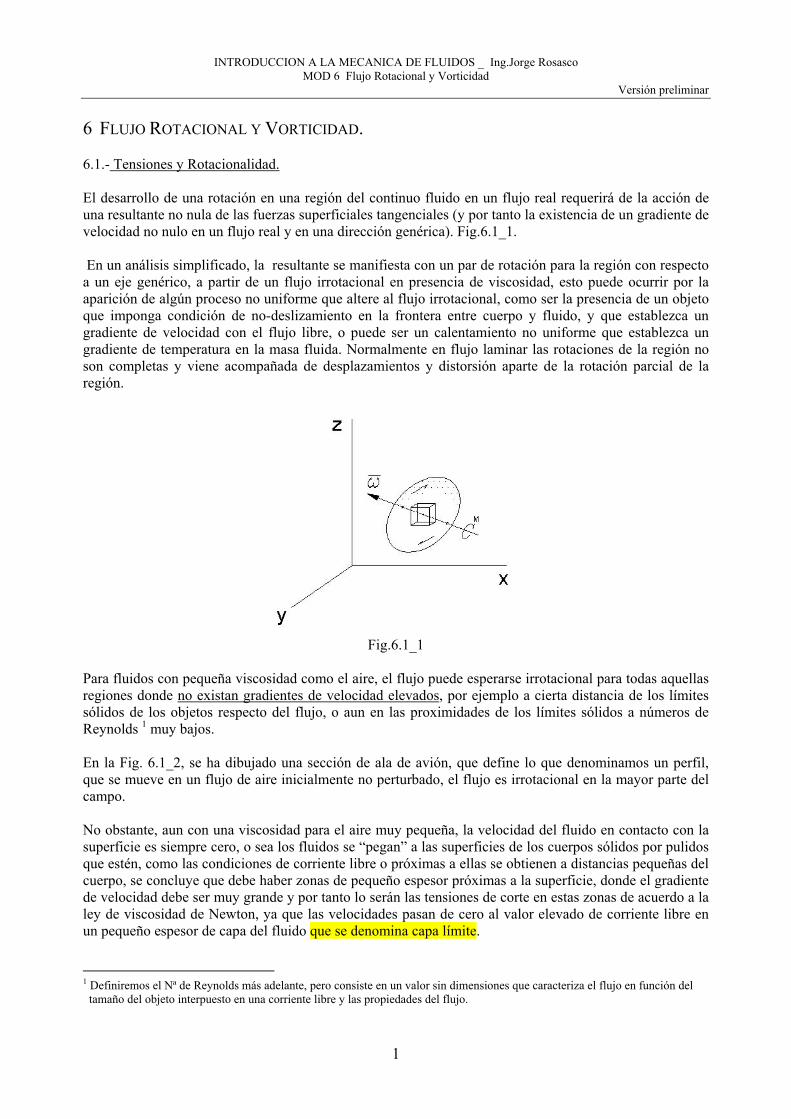
INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 6 Flujo Rotacional y Vorticidad Versión preliminar
1
6 FLUJO ROTACIONAL Y VORTICIDAD. 6.1.- Tensiones y Rotacionalidad. El desarrollo de una rotación en una región del continuo fluido en un flujo real requerirá de la acción de una resultante no nula de las fuerzas superficiales tangenciales (y por tanto la existencia de un gradiente de velocidad no nulo en un flujo real y en una dirección genérica). Fig.6.1_1. En un análisis simplificado, la resultante se manifiesta con un par de rotación para la región con respecto a un eje genérico, a partir de un flujo irrotacional en presencia de viscosidad, esto puede ocurrir por la aparición de algún proceso no uniforme que altere al flujo irrotacional, como ser la presencia de un objeto que imponga condición de no-deslizamiento en la frontera entre cuerpo y fluido, y que establezca un gradiente de velocidad con el flujo libre, o puede ser un calentamiento no uniforme que establezca un gradiente de temperatura en la masa fluida. Normalmente en flujo laminar las rotaciones de la región no son completas y viene acompañada de desplazamientos y distorsión aparte de la rotación parcial de la región.
Fig.6.1_1
Para fluidos con pequeña viscosidad como el aire, el flujo puede esperarse irrotacional para todas aquellas regiones donde no existan gradientes de velocidad elevados, por ejemplo a cierta distancia de los límites sólidos de los objetos respecto del flujo, o aun en las proximidades de los límites sólidos a números de Reynolds 1 muy bajos. En la Fig. 6.1_2, se ha dibujado una sección de ala de avión, que define lo que denominamos un perfil, que se mueve en un flujo de aire inicialmente no perturbado, el flujo es irrotacional en la mayor parte del campo. No obstante, aun con una viscosidad para el aire muy pequeña, la velocidad del fluido en contacto con la superficie es siempre cero, o sea los fluidos se “pegan” a las superficies de los cuerpos sólidos por pulidos que estén, como las condiciones de corriente libre o próximas a ellas se obtienen a distancias pequeñas del cuerpo, se concluye que debe haber zonas de pequeño espesor próximas a la superficie, donde el gradiente de velocidad debe ser muy grande y por tanto lo serán las tensiones de corte en estas zonas de acuerdo a la ley de viscosidad de Newton, ya que las velocidades pasan de cero al valor elevado de corriente libre en un pequeño espesor de capa del fluido que se denomina capa límite. 1 Definiremos el Nª de Reynolds más adelante, pero consiste en un valor sin dimensiones que caracteriza el flujo en función del tamaño del objeto interpuesto en una corriente libre y las propiedades del flujo.

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 6 Flujo Rotacional y Vorticidad Versión preliminar
2
Al haber tensiones de cortante manifiestas dentro de las denominadas “capas límite entre el cuerpo y el flujo desarrollado” o simplemente “capas límites”, esta dada la condición necesaria para que el flujo se torne rotacional dentro de estas zonas, debido a los fenómenos descritos anteriormente, por tanto, en particular más allá del hombro del perfil, en la zona de mayor espesor generalmente se presenta flujo rotacional no estacionario, de tipo turbulento. En la región inicial próxima al borde del perfil, y hasta el hombro, donde los gradientes de presión son negativos, la capa límite es normalmente de flujo laminar, estacionario y rotacional sin torbellinos. Un modelo imaginario de partículas cúbicas presentaría una rotación incompleta cara con cara con pequeñas velocidades angulares, sin establecer giros completos. Esta región próxima al punto de estancamiento de proa para perfiles, es común también para cilindros, esferas y placas planas horizontales en flujo abierto, y bocas de entrada a tuberías, toberas y difusores en flujos cerrados. En un perfil de ala delgado (la sección recta en corte del ala de un avión o un ave) con un ángulo de incidencia pequeño (inferior a 5°) puede observarse una zona de discontinuidad entre las capas límite laminares superior e inferior de diferente velocidad, al sobrepasarse el vértice de salida o posterior, punto también llamado de estancamiento o estagnación de popa, aparece una región estrecha de discontinuidad entre la región superior e inferior, esta discontinuidad da lugar a una zona separada que presenta regiones de rotación completa, llamada estela de vorticidad.. Fig.6.1_2 Los espesores de la capa límite laminar se mantienen pequeños, digamos del orden unas décimas de milímetro hasta la región próxima al hombro del perfil, (zona de gradiente negativo de presiones) más allá del este punto, el gradiente de presiones comienza a aumentar , el flujo alcanza gradientes de presión casi nulos cerca del vértice posterior y más atrás gradientes de presión positivos, provocando el desprendimiento de la capa límite superior, a la salida se crea una discontinuidad que forma una estela o calle de remolinos a la salida, también llamada calle de Von Karman, esta es creada continuamente y luego más corriente abajo, atenuada y anulada por la misma viscosidad. La estela rotacional persistiría por siempre si la viscosidad no la detuviera al igual que la rotación de una bola de billar persistiría por siempre en ausencia de rozamiento, como estos mecanismos son teóricos, podemos tratar matemáticamente con un flujo vorticial no-viscoso persistente en el tiempo; ya sugerimos este tema cuando dábamos separadamente las condiciones de flujo ideal más irrotacional al estudiar la Ecuación de Euler; pero en los flujos reales, la viscosidad se ocupa de generar y luego destruir la vorticidad. 6.1.1.- Rotacionalidad en la experiencia de viscosidad de Newton. Un análisis simple permite detectar la rotacionalidad de las partículas en el experimento de viscosidad de Newton, ya que se da la condición de fluido viscoso (no-ideal) junto a la presencia de un gradiente no nulo de velocidades.

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 6 Flujo Rotacional y Vorticidad Versión preliminar
3
El experimento representa un ejemplo claro de que no todo movimiento rectilíneo es irrotacional, y asimismo ocurre que muchos movimientos fluidos sobre curvas o circunferencias son irrotacionales. En la Fig. 6.1_3 hemos redibujado el experimento y ampliado el conjunto de las velocidades presentes para una partícula, así como su estado de deformación. Si el experimento comienza en t al cabo de un tiempo pequeño t+Δt se presenta una deformación de la partícula donde los planos de dos caras han rotado respecto de las bases que se han desplazado pero mantienen su forma Siendo la velocidad máxima la de la superficie superior, el gradiente se presenta como una línea recta.
Fig.6.1_2
Si analizamos la rotacionalidad asociada al campo de velocidad dentro de la región fluida, tendremos:
→→→→→
∂∂
−∂∂
=∂∂
∂∂
∂∂
=×∇== kyxVj
zxV
Vxzyx
kji
VVrotq
00
Siendo para el resultado, el primer término nulo, quedará:
→→→
∂∂
−== ky
VxVrotq
En la Fig,6.1_3 se muestra que la dirección de la rotación del elemento para la terna dextrógira de la Fig. 6.1_2 tiene la dirección del versor – k , es decir tiene el sentido perpendicular al plano de la figura, y dirigido hacia atrás, dando lugar a la deformación observada del elemento.
Fig. 6.1_3

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 6 Flujo Rotacional y Vorticidad Versión preliminar
4
Las aristas verticales de las partículas fluidas están rotando como parte de su proceso de deformación lenta pero sin dar giros sobre si mismas sino desplazándose en línea recta unas sobre otras sobre laminas planas. 6.2.- Circulación. Dado un campo vectorial de velocidades en el plano o en el espacio, como se ve en la Fig.6.2_1 para un caso plano, se define como circulación sobre una curva cerrada cualquiera referida a una terna inercial definida en el campo en el instante t a la suma extendida para cada punto de los productos escalares de los vectores velocidad con los segmentos diferenciales de la curva en la que están aplicados, llamándola con la letra griega sigma mayúscula Γ resulta:
∫→→
∗=Γc
dsV [6.2.1]
Observe que en la figura 6.2_1, el campo de velocidad y la curva están dibujados sobre el plano (x, y ) y el campo es coplanar con la curva.
Fig.6.2_1
6.3.- Una idea acerca del Teorema de Stokes. Ahora que tenemos una definición matemática de circulación, consideremos un análisis simple de circulación en un flujo 2D, sobre una región cuadrada de lados diferenciales paralelos a los ejes x e y donde las velocidades representan las variaciones incrementales del campo (no dibujado), según se muestra en la figura siguiente Fig. 6.3_1.
Fig.6.3_1

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 6 Flujo Rotacional y Vorticidad Versión preliminar
5
El valor de la circulación en el perímetro cuadrado tomado con sus componentes para los lados AB, AD, BC y DC. será tomando en cuenta los signos respectivos,
→→∗=
∂∂
−∂∂
=∂∂
−∂∂
+−−+
=−∂∂
+−∂∂
++=Γ ∫
dAVrotdxdyy
Vxx
Vy
dydxy
Vxdxdyx
VyVydyVxdxVydyVxdx
Vydydxdyy
VxVxdydxx
VyVyVxdxd
ABCD
][
][
])([])([
Entonces podemos escribir para análisis 2D , tomando en cuenta que el vector rotación es perpendicular al área, que:
zVrot
dAd
dAz
Vrotd→→
=Γ
⇒=Γ [6.3.1]
Mantendremos por ahora este resultado, para luego utilizarlo con el siguiente desarrollo. Como vemos
→Vrot es un vector normal al área del cuadrado diferencial y paralelo al eje z.
6.4 Definición de Flujo Irrotacional y Rotacional. Consideremos una partícula cúbica no diferencial aislada dentro del mismo fluido, (la partícula es una región idealizada del mismo fluido) dentro de un campo de velocidad. Consideremos ahora dos segmentos ortogonales sobre la cara ‘x z’ de la partícula. Fig 6.4_1 Ya sea que el segmento a y/o b solidarios a la partícula, roten, se creará una velocidad angular de los ejes cuyo vector dirección tendría que ser paralelo al eje “y”. Si la partícula rota respecto a un eje paralelo a “y”, los segmentos a y b se mantendrán ortogonales entre sí, sin embargo, si la partícula se deforma, a y b podrán cerrarse o abrirse entre sí barriendo el mismo ángulo, y ocurrirán ambas cosas a la vez si se deforma y rota. Podemos imaginar que si tomamos un promedio de las velocidades angulares de los ejes de cada partícula respecto de y: 2/][ byay ωω + para muchas partículas vecinas de una macro región, si este promedio es nulo, puede haber deformación, pero no rotación de partículas en la región, en cambio si el promedio da un valor positivo o negativo, habrá una velocidad angular neta según el eje “y” de signo positivo o negativo y algunas o todas las partículas de la región rotarán parcial o totalmente en torno a y.

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 6 Flujo Rotacional y Vorticidad Versión preliminar
6
Este mismo análisis se repite para los ejes x , z . Puede ocurrir que los tres ejes presenten componente lo cual nos estará indicando una composición vectorial referida a una rotación neta sobre un eje cualquiera arbitrario. Si al menos una partícula en la región bajo estudio posee una rotación efectiva, respecto de algún eje decimos que el flujo es rotacional en la región e irrotacional si ninguna partícula presenta rotación efectiva o componentes respecto a los tres ejes principales de acuerdo con el criterio anterior. En otras palabras, si los componentes de la velocidad angular respecto a los tres ejes ortogonales se anulan en promedio para todas las partículas fluidas de una región, el flujo es “irrotacional” en dicha región.
Fig 6.4_2 Si ahora en referencia a la terna dextrógira de la fijura 6.4_2, consideramos los segmentos a y b del elemento cúbico coincidiendo con las aristas dx y dz, la componente de velocidad angular de la partícula en la dirección “y” debe ser igual al promedio de velocidades angulares de los segmentos dx y dz en torno a “y”, con lo cual quedaría (recuerde que ω.R = velocidad tangencial ) :
y la componente de la velocidad angular según “y” sería:
)(21)(
21
y 21 xVy
yVx
∂∂
−∂∂
=+=••
θθω
haciendo lo mismo para las otras dos componentes, queda finalmente:
zVx
dz
Vxdyz
VxVx
xVz
dx
Vzdxx
VzVz
∂∂
=−
∂∂
+=
∂∂
−=−
∂∂
+−=
•
•
)(
2
)(1
θ
θ

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 6 Flujo Rotacional y Vorticidad Versión preliminar
7
→→
=⎭⎬⎫
⎩⎨⎧
∂∂
−∂∂
+∂∂
−∂∂
+∂∂
−∂∂
= Vrotky
Vxx
Vyj
xVz
zVxi
zVy
yVz
21)()()(
21ω [6.4.1]
Ya definimos antes que a →ω se lo denomina vector torbellino y a
→→→== Vrotq ϖ 2 se la llama “vector
vorticidad” la condición de irrotacionalidad viene dada si las tres componentes de →→
= ϖ 2q son nulas. El
vector →ϖ manifiesta una rotación neta completa o no, sobre la partícula definida por su módulo,
dirección y sentido, de acuerdo a la interpretación física de rotación dada en el párrafo 6.6. Aplicando la definición matemática de rotacional, a la expresión [6.4.1] esta quedará expresada como:
→→= Vrot
21 ω [6.4..2]
A ω→
se lo denomina vector torbellino o campo de torbellino. El operador rotacional, aplicado a cualquier campo vectorial continuo da otro campo vectorial, en particular cuando es aplicado al campo de velocidad, nos da el campo de “vorticidad” o el campo de “torbellinos” lo que es casi equivalente a menos del factor ½. De la ecuación [6.4.2] surge la condición de irrotacionalidad de la región fluida, si se cumple que:
0q rot V→ →
= = [6.4.3] A partir del resultado 6.3.1 , en el plano era:
2dd rotV dA rotVdAz z
ω→ → →Γ
Γ = ⇒ = =
La componente de →
Vrot tiene dirección z es decir normal al plano donde actúa el campo de velocidades plano. Como el resultado es válido para toda curva cerrada , el área subtendida por una curva cualquiera del plano como se ve en la Fig. 6.4_3, puede aproximarse como una suma de retículos cuadrados, en los cuales las circulaciones en los lados contiguos se cancelan. Cuando el retículo se conforma con cuadrados de área diferencial, quedará solamente con balance positivo la circulación en torno al perímetro, ya que la circulación en los lados adjuntos se han cancelado, con lo cual inferimos que el resultado [6.3.1], es válido para toda curva cerrada plana que encierre un vórtice, así se cumplirá:
( ) ( )C A A
V d s rotV d A rotV n dA→ → → → → →
Γ = = =∫ ∫ ∫i i i [6.4.4]

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 6 Flujo Rotacional y Vorticidad Versión preliminar
8
Fig.6.4_3 Este resultado constituye el Teorema de Stokes en dos dimensiones, donde queda probado que la circulación del vector Velocidad de campo en torno a una curva cerrada plana es igual al flujo de vorticidad normal a la superficie encerrada por la curva. Si bien se ha dado una demostración no formal del Teorema de Stokes en dos dimensiones, el mismo puede demostrarse con todo rigor, el campo de vorticidad genera rotacionalidad al menos en un punto del recinto cerrado por la curva, y el vector vorticidad atraviesa el área que encierra la curva. Nosotros tendremos oportunidad de utilizar este resultado en los párrafos siguientes. La generalización a 3D del Teorema de Stokes se hace para una curva genérica cerrada del espacio, que no necesariamente debe estar contenida en un plano, la curva puede ser la frontera de un casquete genérico formado por dos familias de curvas que formen una malla, con apoyo en una curva c , como se muestra en la figura 6.4_4, el área A será ahora la superficie de este casquete, para cada región pequeña de la cuadrícula ahora se cumplirá que:
dAnVrotdAVrotdAnVrotd→→→→→
∗=∗==Γ )(
Si Γ es la circulación en torno a c, donde interviene el campo de velocidad en el espacio, la componente del rotacional va a ser perpendicular a cada elemento de la superficie A , cuando se hace la integración sumando las contribuciones de todos los elementos de la malla, igual que antes las circulaciones se cancelan entre los limites de los lados adjuntos y solamente contribuyen los elementos de la frontera cuya suma da la circulación en la curva c, o sea la circulación en torno a la curva genérica del espacio, y obtendremos el resultado siguiente [6.4.5].
∫∫∫∫→→→→→→→→
∗=∗=∗=∗=ΓAAAC
AdnAdnVrotAdVrotsdV ω2 [6.4.5]
que para flujo en el espacio 3D relaciona una integral curvilínea cerrada de circulación en el espacio 3D con una integral de superficie, que representa el flujo del campo de Vorticidad a través de una superficie cualquiera (un casquete) que tenga como borde o contorno la curva “c ”.
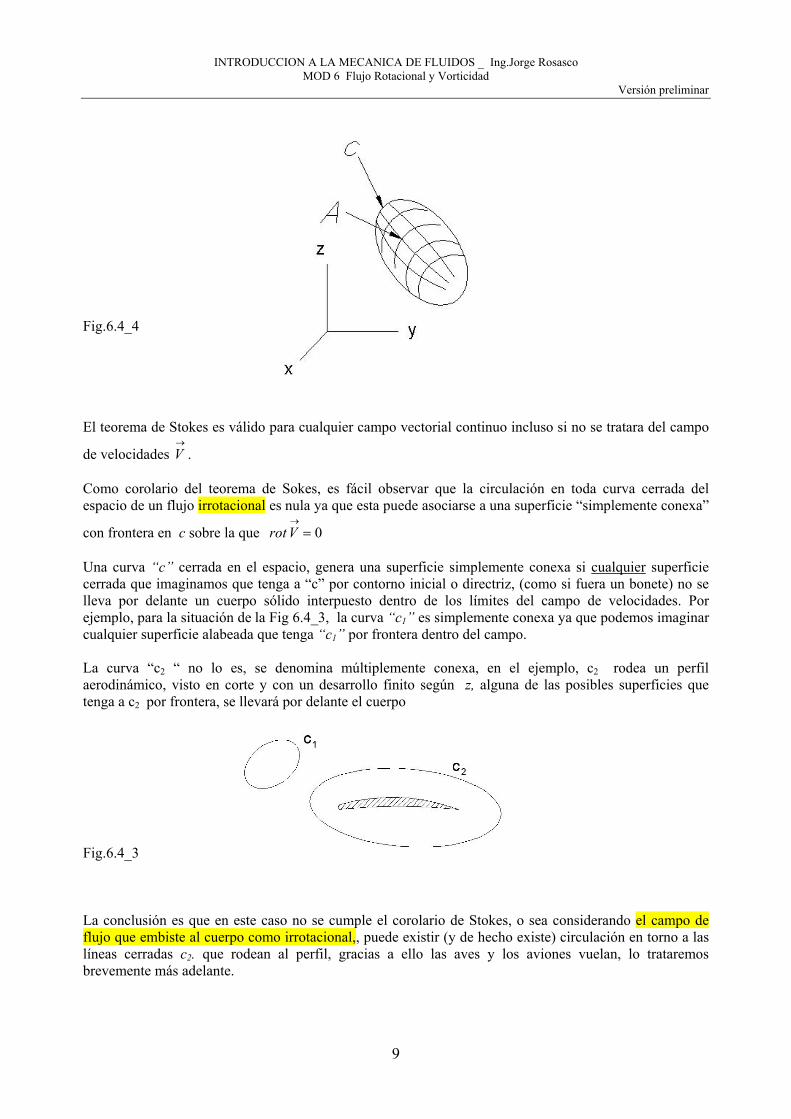
INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 6 Flujo Rotacional y Vorticidad Versión preliminar
9
Fig.6.4_4 El teorema de Stokes es válido para cualquier campo vectorial continuo incluso si no se tratara del campo
de velocidades →V .
Como corolario del teorema de Sokes, es fácil observar que la circulación en toda curva cerrada del espacio de un flujo irrotacional es nula ya que esta puede asociarse a una superficie “simplemente conexa”
con frontera en c sobre la que 0=→Vrot
Una curva “c” cerrada en el espacio, genera una superficie simplemente conexa si cualquier superficie cerrada que imaginamos que tenga a “c” por contorno inicial o directriz, (como si fuera un bonete) no se lleva por delante un cuerpo sólido interpuesto dentro de los límites del campo de velocidades. Por ejemplo, para la situación de la Fig 6.4_3, la curva “c1” es simplemente conexa ya que podemos imaginar cualquier superficie alabeada que tenga “c1” por frontera dentro del campo. La curva “c2 “ no lo es, se denomina múltiplemente conexa, en el ejemplo, c2 rodea un perfil aerodinámico, visto en corte y con un desarrollo finito según z, alguna de las posibles superficies que tenga a c2 por frontera, se llevará por delante el cuerpo Fig.6.4_3 La conclusión es que en este caso no se cumple el corolario de Stokes, o sea considerando el campo de flujo que embiste al cuerpo como irrotacional,, puede existir (y de hecho existe) circulación en torno a las líneas cerradas c2. que rodean al perfil, gracias a ello las aves y los aviones vuelan, lo trataremos brevemente más adelante.

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 6 Flujo Rotacional y Vorticidad Versión preliminar
10
6.5.- Vórtice Matemático en flujo Ideal. Ahora vamos a considerar un flujo ideal, permanente, incompresible e irrotacional particular. Supongamos un flujo definido por líneas de corriente circulares con velocidades definidas (en coordenadas cilíndricas) por:
θθ→→
= eVV El esquema se ve en la Fig 6.5_1; si suponemos flujo permanente e incompresible se da la condición, de la Ec. [5.2.1c]:
0=→Vdiv
que expresada en coordenadas cilíndricas es (recuerde que la divergencia aplicada a un campo vectorial da un campo escalar):
][][1)(1zzVV
RRRVRR
Vdiv∂∂
+∂∂
+∂∂
=→
θθ [6.5.1]
Fig.6.5_1 Como para éste movimiento, Vr = Vz = 0, la expresión anterior {6.5.1}queda:
CteVd
dVVR
Vdiv =→=→=∂∂
=→
θθθ
θθ 0 0][1
si ahora incluimos la condición de flujo irrotacional:
0=→Vrot
que también expresado en coordenadas cilíndricas es:

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 6 Flujo Rotacional y Vorticidad Versión preliminar
11
→=∂∂
−∂∂
=∂∂
∂∂
∂∂
=→→
→→
→
→ 0][1][1
00
reRVzRzeRV
RRRV
zR
Rzee
Rre
Vrot θθ
θθ
θ
si consideramos flujo 2D, el último término de la ecuación anterior se anula ya que todos los cortes según z tienen la misma distribución de flujo, y no hay variación de la velocidad tangencial según z, por lo cual queda:
RCteVCteRVzeRV
RR=→=→=
∂∂ →
θθθ 0][1
o sea el campo distribuido de velocidades en forma radial, tendrá una distribución de hipérbola equilátera, y si calculamos la circulación sobre una circunferencia centrada en el origen será:
CtedCteedReR
CtesdV 2 πθθθθ ==∗=∗=Γ ∫∫∫→→→→
este resultado nos indica que la circulación será igual para todas las circunferencias o líneas de corriente concéntricas, entonces la constante puede ser expresada como:
π2Γ
=Cte
y el campo de velocidades, expresado como:
θπ
→→ Γ= e
RV
2 [6.5.2]
de acá vemos que las componentes del campo serán:
0 2
0
=
Γ=
=
VzR
V
Vr
πθ
también es fácil observar que ∞→θV si R → 0 o sea a partir de esto, inferimos que en el origen hay una singularidad o un punto de velocidad tangencial indefinida que llamaremos Vórtice potencial; como por el teorema de Stokes era:
→→→==
Γ= ω2Vrot
dAdq

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 6 Flujo Rotacional y Vorticidad Versión preliminar
12
Donde →q era el vector vorticidad, concluimos que en el origen, cuando dRR → y dAA → hay un
punto que por una parte esta rotando con velocidad infinita, como ninguna partícula diferencial del continuo con realidad física perteneciente al campo podrá cumplir con esta condición, concluimos que allí debe haber un vacío teórico sometido a rotacionalidad, y cualquier frontera c que incluya al punto central tendrá invalidada la hipótesis del continuo y no podrá ser considerada simplemente conexa y no cumplirá el corolario de Stokes, es decir para este flujo irrotacional particular hay un punto que no es irrotacional. Decimos entonces que en el centro hay un vórtice de velocidad angular ω e intensidad Г , y también para cualquier circunferencia en torno al origen se manifestará la vorticidad y será:
2 2 22 d R VrotV zz zdA R
π θω ωπ
→ →Γ= = = =
cuando R crece Vθ disminuye en proporción inversa a R por lo cual el cociente se mantiene constante, o en otras palabras hay un solo vector vorticidad en el origen que manifiesta una circulación constante para toda circunferencia concéntrica al origen. Para cualquier circunferencia o curva cerrada que no contenga al origen, la circulación será cero, ya que la vorticidad no queda atravesando el área encerrada de acuerdo al teorema de Stokes y tales curvas son simplemente conexas. 6.6 Interpretación física de la Vorticidad y la Circulación. En mecánica hablamos de dos movimientos básicos típicos: “ traslación” y ”rotación”. La traslación para un elemento de fluido significa que el elemento mantiene constante su relación angular respecto del sistema de ejes de referencia, pero el elemento puede describir cualquier trayectoria, incluidas trayectorias curvas. Las hamacas en el juego de los parques de diversiones, “la vuelta al mundo”, es un ejemplo de movimiento de traslación sobre una trayectoria curva circular. La rotación tiene por significado que el elemento cambia su relación angular con respecto al sistema de ejes o que gira respecto a su centro de masa mientras se traslada. El movimiento de la Luna respecto a la Tierra es un ejemplo de traslación + rotación, ya que siempre vemos la misma cara lunar. En fluidos los elementos forman un continuo, pero para cada partícula fluida podemos hablar de escurrimiento rotacional o irrotacional basados en los conceptos anteriores, por ejemplo el escurrimiento sobre el cilindro circular embestido por una corriente y fuera de la capa límite, es irrotacional, o sea ningún pequeño elemento del fluido tiene movimiento rotacional aunque la corriente se desarrolla según trayectorias curvas. El escurrimiento irrotacional es el tipo de movimiento fluido más simple, pudiendo por esta razón ser tratado matemáticamente. Es el escurrimiento que se encuentra fuera de la capa límite cuando una corriente no turbulenta pasa bañando un obstáculo sólido. En tal escurrimiento el movimiento de las partículas fluidas es solamente de traslación. Cuando no se satisface esta condición, como vimos, el campo posee vorticidad. Frecuentemente cuando el movimiento es irrotacional se dice que no tiene vorticidad, también se lo llama “escurrimiento potencial”. Vamos ahora a dar una interpretación más física de la circulación. Supongamos que hacemos girar un cilindro a velocidad angular constante en un fluido en reposo (Fig.6.4_1).

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 6 Flujo Rotacional y Vorticidad Versión preliminar
13
Si no existiese viscosidad, es decir, si el fluido fuese ideal el cilindro giraría sin alterar para nada el campo fluido en torno de él. (la condición de no-deslizamiento no se cumpliría) en rigor podríamos decir que unas pocas partículas en contacto quedarían adheridas por una combinación de rugosidad y efectos de campo eléctrico a la superficie, pero al no haber viscosidad no podrían trasladar a otras su estado de no-movimiento a través e fuerzas de cortante. Pero si la viscosidad existe, y el fluido se adhiere a las paredes del cilindro, a partir de la superficie se establece un patrón decreciente de velocidades en primera aproximación de tipo hiperbólico, siendo todas las capas circunferenciales arrastradas por la rotación con velocidades decrecientes. Para cada capa se establece un patrón de rotación que en rigor es una “traslación circular” ya que las partículas fluidas se moverán en trayectorias circulares, pero sin movimiento de rotación sobre si mismas o sea en forma irrotacional sobre sí mismas. Fig.6.4_1 El hecho de que la partícula se traslada sin rotar se puede pensar como que la partícula recibe un “torque enderezante” debido a la diferencia de tensión entre las caras opuestas, que le imponen las partículas de las circunferencias vecinas a través de la viscosidad en el caso de un flujo real, la interior de mayor velocidad y la exterior de menor velocidad, en el patrón de flujo, y que hacen que el flujo sea irrotacional en referencia a ejes fijos x e y. El escurrimiento entonces originado por la rotación de un cilindro será uniforme e irrotacional y las líneas de corriente son circunferencias concéntricas ocurriendo que a lo largo de cualquiera de ellas la velocidad tangencial se mantiene constante mientras que la velocidad decrece con el radio o distancia al centro. El movimiento es equivalente al que se presenta cuando se vacía una bañera en la cual en lugar de un cilindro sólido tenemos una línea de vórtice perpendicular al centro en el punto x = 0, y = 0, pero igual que en el caso anterior las partículas que se mueven en circunferencias concéntricas al vórtice no tienen vorticidad. Aplicando el resultado [6.3.1] a las circunferencias concéntricas, la circulación será: rVrπ2=Γ ; de este resultado se observa fácilmente que la circulación será constante para cualquier línea de corriente circular que rodee al origen. O sea que el producto de la velocidad tangencial por la longitud de la curva cerrada 2π r, nos proporciona una cantidad que caracteriza al movimiento. Si el cilindro se hiciera más chico, la velocidad periférica debería ser cada vez más grande si queremos obtener el mismo valor de circulación.
INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 6 Flujo Rotacional y Vorticidad Versión preliminar
14
Así, cuando r → 0 Vt → ∞ lo cual no tiene sentido físico y se describe diciendo que el punto r = 0 contiene una singularidad, llamada línea de vórtice de intensidad Г, perpendicular al plano del movimiento de las partículas y que en cualquier otro punto del campo el movimiento está inducido por esta intensidad Г del vórtice. Para este movimiento se observa también que la circulación sobre toda curva cerrada que encierre al vórtice valdrá Г, y valdrá 0 para toda curva que no lo encierre. Ahora si hacemos un cerramiento sobre una circunferencia diferencial que encierre al vórtice y formamos la razón:
qdrV
drdrV
==== ωθπ
θπ 222ldiferencia curva la de área
ldiferencia curva la sobren circulació2 [6.4.1]
Este es el valor en módulo del vector vorticidad, que hemos definido antes (será también la velocidad angular del cilindro material de diámetro diferencial que establezca un campo caracterizado por Г ). O sea matemáticamente definimos la vorticidad en un punto dado del campo como el valor límite del cociente [6.4.1] cuando el área tiende a cero. Es así que la vorticidad mide la intensidad local de la rotación de la partícula. Un pequeño molinete ubicado con eje de rotación según z no rotará en ningún punto del campo, excepto en el origen y lo hará con velocidad angular ω. 6.7 Corolario sobre la Interpretación física de la Vorticidad y la Circulación. Entonces según vimos, en el ejemplo del cilindro en rotación, si el fluido es viscoso (no ideal) las capas sucesivas se pondrán a girar debido al intercambio de cantidad de movimiento, desde las capas veloces en contacto con la superficie del cilindro y el patrón será decreciente a partir de la superficie del cilindro, (radio R ) hasta infinito en que será cero. Estos patrones también pueden establecerse en flujo ideal mediante vórtices de distintas intensidades ubicados en el origen. Si el cilindro gira con una velocidad angular ω1 , el patrón lo definirá la curva 1 de la figura:
1 1V Rs ω= si la velocidad angular es mayor, ω2, el patrón será:
22V Rs ω=
y estará definido por otra hipérbola equilátera (curva 2), esto se observa en la figura siguiente 6.7_1. Fig.6.7_1

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 6 Flujo Rotacional y Vorticidad Versión preliminar
15
Para fluidos de baja viscosidad, digamos del orden o inferior a 1cp tal como el agua o el aire, el patrón de hipérbola equilátera es bastante aproximado a partir de la distancia R desde el origen, así como el mecanismo de torque enderezante debido a diferencia de velocidades tangenciales al variar el radio, y equivalente al formado por el modelo construido con un flujo irrotacional puro (μ=0) más un “vórtice potencial puro” ubicado en el origen, y que genera un campo según vimos que responde a la razón:
rCteV =θ [6.7.1]
En el caso de considerar flujo ideal más un vórtice potencial central, las partículas de flujo hacen trayectorias circulares de velocidades tangenciales decrecientes, que son también traslaciones puras de las partículas en torno a trayectorias circulares, e irrotacional desde r = 0 a ∞ , siendo la ausencia de rotación sobre la partícula en este modelo una consecuencia natural de la conservación de la cantidad de movimiento angular en un fluido sin viscosidad. La expresión anterior, [6.7.1] se expresa normalmente aplicando la [6.5.2]como:
rV
πθ 2Γ
= [6.7.2]
llamando Г a la cantidad escalar denominada “circulación” , en la expresión [6.7.2] se ve claramente que la circulación es una cantidad escalar ya que Vθ es una de las componentes de la velocidad tomada en coordenadas polares y por tanto un escalar. Volviendo a la descripción del modelo físico, como las partícula central no puede sostener una velocidad angular tendiendo a infinito en las proximidades del vórtice, se asume la existencia de un núcleo de fluido en rotación rígida de radio diferente de cero, con centro en el origen. Entonces, de la anterior:
θπ Vr2=Γ considerando una rotación rígida de velocidad angular ω sobre la periferia de radio Ro
RoV ωθ = y reemplazando queda:
22 Roωπ=Γ Reiterando lo que ya dijimos antes, de la {6.7.2] obtenemos 222 RoVRo ωπθπ ==Γ donde Г resulta constante para todas las circunferencias concéntricas exteriores a partir de Ro ya que Vθ disminuye linealmente en igual proporción con que r aumenta y recíprocamente porque están vinculadas por una función inversa al radio como se ve en [6.7.1}, la velocidad angular del núcleo rígido, en estos modelos físicos, define la intensidad del vórtice lineal. El patrón matemático fuera del núcleo, describirá la curva # 1 de la figura 6.7_1, y por eso se dice que hay un vórtice equivalente de intensidad Г1 en el origen, si se desea obtener el patrón de la curva # 2 también habrá que colocar un vórtice que genere una velocidad tangencial infinita al aproximarnos al origen pero que establezca un patrón de flujo diferente dado por la curva # 2 y un patrón de velocidad tangencial acorde a la nueva condición.
INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 6 Flujo Rotacional y Vorticidad Versión preliminar
16
Estas singularidades colocadas en el origen y con fluido ideal, reemplazan al modelo de núcleo rígido con diferentes velocidades angulares y fluido real, son una idealización matemática, pero para fluidos reales de baja viscosidad conduce a una equivalencia correcta a distancias no muy próximas al origen o sea fuera de lo que denominamos “núcleo vorticoso” del cual hablaremos un poco más adelante en este módulo. Como conclusión, la circulación sobre una curva que encierre a la línea de vórtice de intensidad Г es Г y si no la encierra es cero. Aplicando el Teorema de Stokes, podemos decir que la circulación a lo largo de una curva cerrada del campo, es igual a la suma de las intensidades de los vórtices que atraviesan el área definida por el encerramiento que la curva haga sobre ellos. Notas Complementarias. 6.8.- Teoría del movimiento vorticoso. A diferencia de los tipos de flujos discutidos anteriormente, trataremos aquí aquellos tipos de movimiento en que la rotaciónalidad es diferente de cero; vale decir movimientos rotacionales en todo o una parte del campo de acuerdo a las pautas dadas en los párrafos anteriores discutidos en éste módulo. Nuestra condición inicial es entonces que para alguna región del campo:
0≠→Vrot [6.8.1]
siendo →V el campo vectorial de velocidades.
De acuerdo con el Teorema de Stokes.
2C A A A AV ds rotV dA rotV n dA q n dA n dAω→ → → → → → → → → →
Γ = = = = =∫ ∫ ∫ ∫ ∫i i i i i
La misma indica que la circulación en torno a una curva cerrada “c” es igual al flujo del vector vorticidad a través del área “A” para la cual “c” la curva frontera de “A”, como se esquematiza en la figura siguiente,
Fig.6.8_1

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 6 Flujo Rotacional y Vorticidad Versión preliminar
17
Tendremos en consecuencia que la circulación a lo largo de una curva cerrada del campo rotacional es diferente de cero. Vimos también en el punto 6.5, que puede definirse un patrón en flujo ideal con circulación diferente de cero cuando la circulación está calculada en torno a un punto singular. Las situaciones donde aparece movimiento de origen vorticoso se dan entonces cuando: a.- se define un flujo ideal, o potencial con uno o más hilos de vórtice libres , y que van a generar una circulación distinta de cero cuando esta sea evaluada en torno a una curva cerrada que encierre a los mismos. b.- dentro de las capas límites, zonas de cortantes y zonas separadas de un flujo real como veremos más adelante con más detalle. Por ejemplo, al comienzo de este módulo se ha mencionado un tipo de movimiento vorticoso donde un flujo real embestía un obstáculo aerodinamizado delgado y se producía una doble capa límite laminar en las superficies superior e inferior, dentro de las cuales el flujo es rotacional y también se generaba una estela vorticosa a la salida cuando la capa límite superior se desprendía cerca del borde de salida. En cuerpos de sección poco delgada como cilindros embestidos por una corriente, el fenómeno se da con con mayór intensidad con capas límites turbulentas o bien por flujo separado con vorticidad con zonas de retroceso de flujo debido al fenómeno de separación de capa límite. c.- cuando el flujo rodea una esquina abrupta, Fig 6.8_2, y hay discontinuidad de velocidades entre dos zonas de la masa fluida. En la Fig. 6.8_2 (a) se observa un perfil de velocidades para un flujo ideal no-viscoso que embiste la esquina aguda, y en (b) para un fluido poco viscoso como el aire, con una capa vorticosa desprendida. Más adelante discutiremos nuevamente el problema y daremos una explicación acerca de la formación de la capa vorticosa. Fig.6.8_2 Cuando estudiamos la interpretación física del rotacional, vimos que el mismo en un punto daba una
medida de la velocidad angular del elemento o partícula en el punto; llamando →ϖ al vector rotación o
vector torbellino, y ω ω→
= a la velocidad angular, y habíamos demostrado que →→
= ϖ2Vrot .

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 6 Flujo Rotacional y Vorticidad Versión preliminar
18
Al vector →→
= ω2q lo llamamos vector vorticidad, y se puede operar con el campo vectorial →→
= ϖ2Vrot en forma similar que con el campo de velocidad siendo las “ líneas de corriente” en este caso las líneas de vórtice que conforman un campo de vorticidad que coexiste con el campo de velocidad en la misma región. Las líneas de vórtices también deben ser continuas y derivables con continuidad en este campo. 6.9.- Teoremas troncales referidos al Movimiento vorticoso. 1.- El campo de vorticidad es solenoidal. Repasamos los conceptos ya conocidos acerca de la vorticidad: a.- se ha definido el campo de vorticidad, como un campo que se extrae del campo de velocidades V
→ a
partir de la evaluación de la rotacionalidad del mismo:
( , , , )q x y z t rot V→→
= si el campo de velocidades posee cero vorticidad, se denomina irrotacional.
b.- a partir de la primera identidad vectorial ( ) 0div rot A→= de esta se deduce que el campo de vorticidad
la cumplirá automáticamente o sea,
0q rot V div q→→ →
= → = : Esto equivale a decir que el vector vorticidad es solenoidal, y que el campo de vorticidad es “incompresible”. El lugar geométrico de las tangentes al vector vorticidad, se llaman líneas de vórtice, y se definen de manera análoga a las líneas de corriente, y por tanto no puede haber líneas de vórtice que no sean derivables con continuidad o discontinuas o que se crucen.
A veces se define a →→→
== qVrot21
21ω como campo de vectores rotación o campo de torbellinos.
2.- la circulación del vector →V es la misma para todas las curvas que rodean a un tubo de vórtices.
Para la demostración, de las hipótesis 1 y 2, nos apoyamos en la definición de tubo de vórtices, que está referida a la Fig.6.8_3. El tubo de vórtices, se define en forma equivalente al tubo de corriente, como un conjunto de líneas de corriente, cuya frontera son también líneas de corriente; en el caso del tubo de vórtices se reemplaza el
vector vorticidad q→
por el vector V→
, en este sentido, el tubo de vórtices es un conjunto de filamentos de
vórtice que pasan a través de cada punto de una superficie arbitraria que intersecte al tubo. Las líneas q→
, que pasan sobre la superficie lateral, forman: “la superficie lateral del tubo de vórtices”, y se cumple que:
0q n→ →
=i

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 6 Flujo Rotacional y Vorticidad Versión preliminar
19
siendo n→
el versor normal a la superficie en cada punto. Supongamos una curva cerrada simple de Jordan “c” (es decir que no se corte a si misma), pueda ser contorno o directriz de filamentos de vórtice que se apoyan en ella, y que forman la superficie lateral del tubo de vórtices.
Resulta evidente que la circulación de 2q ω→ →= a lo largo de cualquier curva cerrada c’ contenida sobre
la superficie lateral del tubo será cero, ya que no hay flujo de vorticidad a través de esta superficie y por el teorema de Stokes será en este caso:
2 0C A A A AV ds rotV dA rotV n dA q n dA n dAω→ → → → → → → → → →
Γ = = = = = =∫ ∫ ∫ ∫ ∫i i i i i [6.8.2]
Como c’ es una curva de Jordan dibujada sobre la superficie del tubo, como se indica en la Fig.. 6.8_3
que encierra un área A’ , el flujo a través de esta superficie es nulo por ser →→
= ω2q tangente a la
superficie o en otras palabras no hay vectores →q que pasen a través de A’.
Fig.6.8_3 Si este concepto está claro, veamos ahora que pasa cuando tomamos una superficie A’ diferente como se indica en la Fig. 6.8_4. también dibujada sobre la superficie del tubo, pero que rodea completamente al tubo de vórtices, formada por c1 y c2 que son dos curvas directrices que rodean al tubo, unidas por generatrices infinitamente próximas, de manera que en el límite se solapan y hacemos con ellas una sola curva y por tanto habrá una superficie envolvente completa. Fig.6.8_4

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 6 Flujo Rotacional y Vorticidad Versión preliminar
20
La circulación va a ser nula análogamente al caso anterior ya que esta nueva A’ es también una superficie
la cual no es atravesada por el campo →→
= ω2q . En el límite, cuando los dos cortes coincidentes de las generatrices estén tan próximos que se confundan con uno solo, la circulación que pasa por ellos será nula por quedar recorridos en sentidos opuestos, quedando solamente las circulaciones a lo largo de c1 y c2 tomadas también en sentidos opuestos una respecto a otra. Si la suma de estas circulaciones es cero por la aplicación del teorema de Stokes a la nueva superficie de Jordan, quiere decir que al tomarlas en el mismo sentido serán iguales, o sea:
21 021 cccc Γ−=Γ⇒=Γ+Γ [6.8.3] como los sentidos que habíamos tomado para c1 y c2 eran opuestos concluimos por tanto que la
circulación de →V es la misma para todas las curvas directrices que rodean al tubo de vórtices, incluso si
son coplanares, con lo que queda probada la hipótesis 2. 3.- las líneas de vórtice no pueden empezar ni terminar dentro del fluido ideal, o empiezan y terminan en los contornos del fluido, o bien son cerradas. Si el tubo de torbellino es muy delgado, en el límite será un filamento, la circulación para una curva que
subtiende una sección cualquiera suficientemente pequeña para que sobre ella el vector →→
= ϖ2q pueda considerarse constante , valdrá de acuerdo a Stokes.
AΔ= 2ωγ y como la circulación no es nula como demostramos anteriormente, y tampoco lo es ΔA, entonces:
0 2 ≠ω
o sea que el vector vorticidad es diferente de cero, si a esto le sumamos la analogía del vector 2q ϖ→ →
=
con el vector →V de las líneas de corriente, la línea vorticosa no puede tener un final abrupto si su valor en
módulo es distinto de cero, y no puede “no-continuar” un ds más allá . Fig. 6.8_5 , porque habría una circulación diferente de cero para una superficie cerrada subtendida por c2 que no esta encerrando a un vórtice.

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 6 Flujo Rotacional y Vorticidad Versión preliminar
21
Fig.6.8_5
O sea desde el punto de vista teórico (vorticidad inmersa en una región de flujo ideal), las líneas de vórtice no pueden ser funciones discontinuas; por tanto los filamentos o hilos de vórtice no empiezan ni terminan en el fluido, o empiezan y terminan fuera de la región o son cerrados con lo que se demuestra la premisa 1, por ejemplo una corona o toroide de humo de un cigarro, forma un anillo vorticoso cerrado. 4.- el flujo de vorticidad a través de cualquier sección transversal del tubo de vórtices, es constante en cualquier instante del tiempo. En referencia a la Fig. 6.8.6 siguiente, observamos un tubo de vórtices en el cual se han definido dos superficies arbitrarias que lo intersectan,
Fig.6.8_6
Aplicamos el Teorema de la divergencia o Gauss, al campo de la vorticidad:
A V
B dA div B dv→ → →
=∫ ∫i
aplicado a nuestro caso, y teniendo en cuenta el resultado del teorema 1:

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 6 Flujo Rotacional y Vorticidad Versión preliminar
22
0A V
q dA div q dv→ → →
= =∫ ∫i
entonces, aplicando la igualdad con el primer miembro y expandiendo a las áreas genéricas definidas:
1 2
0A A A AL
q n dA q n dA q n dA q n dA→ → → → → → → →
= − + + =∫ ∫ ∫ ∫i i i i
el último término del segundo miembro es nulo ya que no hay flujo de vorticidad por la superficie lateral es nula, también se han tenido en cuenta los signos que imponen las normales respecto a las superficies por lo cual el resultado anterior, quedará:
1 2
1 2
0A A
A A
q dA q dA
q dA q dA
→ → → →
→ → → →
− + = →
=
∫ ∫
∫ ∫
i i
i i
O sea que el flujo de la vorticidad a través de cualquier sección transversal del tubo de vórtices es constante en cualquier instante del tiempo, por lo cual el flujo de la vorticidad dentro del tubo de vórtices es una constante denominada intensidad de la vorticidad del tubo. El teorema 4 pudo ser deducido análogamente como corolario del teorema 2, ya que también las circulaciones correspondientes a cualquier línea cerrada particular sobre el tubo como c1 y c2, tienen igual valor.
Nos quedamos también con la idea de que q→
y ω→
tienden a infinito cuando A dA→ , es una condición homóloga a la ecuación de continuidad para el campo de velocidades. Así como las líneas de corriente forman tubos de corriente en flujo permanente, las líneas de vórtices pueden formar tubos, o filetes como se indica en la Fig. 6.8_7. cuando ∆A → dA tendremos un filamento o hilo de vórtice.
Fig.6.8_7

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 6 Flujo Rotacional y Vorticidad Versión preliminar
23
5.-El Teorema de Kelvin – Helzmholtz .o Teorema de la Circulación Si calculamos la derivada total de la circulación respecto del tiempo.
→→
→→→→
∗+∗=∗=Γ
∫∫∫ dlDt
VDdlDtDVdlV
DtD
DtD )()( [6.9.1]
como:
tVVgradV
DtVD
∂∂
+∗=
→→→
→
) ( ,
y recordando que para flujo permanente puede escribirse de acuerdo a la forma 1 de la Ec. de Euler.
pgradzgradgVgradVDt
VDρ1. )( −−=∗=
→→→
o bien pzgDt
VD∇−∇−=
→
ρ1
Hacemos ahora un pequeño análisis auxiliar, ya que longitud y tiempo son variables independientes, podemos cambiar el orden de la derivación en la siguiente expresión:
→→→
→→→
∗+−∗=Γ
→==
∫∫ dlpgradzgradgdVVDtD
VdtDlDd
DtdlD
) 1 .(
:queda [6.9.1]en reempl )( )(
ρ
[6.9.2]
analizando los integrandos de la expresión anterior vemos que:
)2
2(VddVdVV ==∗
→→
( )
dzgkdzjdyidxkdzdzj
dydzi
dxdzg
dpdpkdzjdyidxkdzdpj
dydpi
dxdp
=⎟⎠⎞
⎜⎝⎛ ++∗
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ →+
→+
→
==⎟⎠⎞
⎜⎝⎛ ++∗
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ →+
→+
→
→→→
→→→
1311ρρρ
entonces el segundo integrando en [6.9.2], queda:
dpdzgρ1. +
siendo entonces la derivada sustancial de la circulación:
)1()2
2( dpdzgVd
DtD
ρ+−=
Γ∫∫
Como la segunda integral está tomada para un punto inicial y final coincidentes en un lazo cerrado que recorre una curva cerrada ‘c’, sobre un valor escalar, su resultado será cero, de acuerdo a la teoría de las integrales de línea, por tanto sería válido invertir el signo de la integral, ya que el efecto sería el mismo, con lo cual podemos escribir:

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 6 Flujo Rotacional y Vorticidad Versión preliminar
24
]1)22([)1()
2
2( dpdzgVddpdzgVd
DtD
ρρ++=++=
Γ∫∫∫
Al asociar los dos términos del segundo miembro, el corchete dentro de la integral de línea es la expresión de la Ecuación. de Bernuolli en forma diferencial y cuyo valor es igual a cero como quedó demostrado anteriormente en este módulo 5 , (ver el párrafo 5.3) entonces:
cteDtD
=Γ→=Γ 0 [6.9.3]
que nos indica que para un flujo no viscoso permanente moviéndose en un campo conservativo, y considerando la densidad constante o solamente función de la presión, (flujo barotrópico), la circulación sobre una trayectoria que se mueve con el flujo es constante, es decir si la circulación en una parcela del campo de flujo es Γ = 0 entonces permanecerá siempre igual a cero, y si hay al menos un vórtice matemático, la vorticidad permanecerá constante sin variación en su intensidad por siempre. Decimos vórtice matemático porque la vorticidad no se puede crear en condiciones de viscosidad iguales a cero es decir para flujo ideal. Pero se puede trabajar con un flujo ideal mas vorticidad matemática impuesta, para simular en parte flujos reales. Este es el análisis que se hace en una rama específica de la dinámica de fluidos llamada Estudio de los Flujos Potenciales Incompresibles o simplemente Flujo Potencial Incompresible, que estudiaremos sucintamente en el módulo siguiente. La consecuencia más interesante del análisis de flujo potencial más vorticidad matemática es la descripción del fenómeno conocido como Efecto Magnus y la transformación conforme que se hace desde el plano complejo de descripción de este modelo en otro plano complejo y es conocida como Transformación Jukowski, que es la base teórica para la descripción de los efectos de sustentación de perfil de ala de la aerodinámica clásica. En los párrafos anteriores hemos tratado matemáticamente la vorticidad en forma independiente de la viscosidad, y asociada a campos potenciales también hemos arribado a conclusiones teóricas , pero la vorticidad y la viscosidad están siempre asociadas en la naturaleza. En el caso de flujos reales la viscosidad contribuye a la formación, traslación y disipación de la vorticidad en el seno del flujo. En resumen: a.- la circulación es nula cuando es tomada sobre una línea cerrada cualquiera trazada sobre la superficie lateral de un tubo vorticoso. b.- la circulación adquiere el mismo valor sobre cualquier línea cerrada que rodee al tubo vorticoso ya sea que ella esté por dentro o por fuera del mismo, o sobre la superficie lateral. c.- se denomina intensidad del tubo vorticoso al flujo del vector vorticidad medido sobre el área subtendida por la línea cerrada para dicho tubo, y es un escalar.
2 2 2A A
n dA dA Aω ω ω→ →
Γ = ∗ = =∫ ∫

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 6 Flujo Rotacional y Vorticidad Versión preliminar
25
d.- un concepto interesante es que si tenemos un tubo vorticoso de intensidad Γ1, y supongamos que el
tubo se va adelgazando según su longitud s, entonces 0 y A q→
→ →∞ , al efecto que la intensidad particular Γ1, se mantenga constante, con esta idea un filamento de vórtice se manifiesta como puntual cuando atraviesa un área, con módulo infinito formando una singularidad en el campo de movimiento,
pero q→
adquiere valores finitos y cada vez menores cuando la sección del tubo aumenta para una intensidad dada. 6.10.- Núcleo Vorticoso y Modelización de torbellinos reales. Al aplicar los conceptos de movimiento irrotacional y rotacional a los fluidos, debemos recordar que a deferencia de los cuerpos rígidos, la masa fluida permite el movimiento relativo de su volumen independientemente de la corriente principal, sin dejar de lado la hipótesis del continuo. El modelo que hemos explicado en el punto 6.6, es un modelo físico que produce un escurrimiento uniforme irrotacional sobre circunferencias concéntricas y con un patrón decreciente de velocidades tangenciales en proporción inversa a su distancia al centro, toda la región es irrotacional a excepción de un único punto matemático en el origen; este punto contiene al vórtice que es normal al plano (x,y). Como en la realidad física cuando una partícula se ubique sobre el centro de rotación estará afectada por el vórtice y como no puede tener velocidad angular infinita, lo que define la rotación cerca del origen en los patrones físicos es el denominado “núcleo” que se comporta como un cuerpo rígido de diámetro Rn y velocidad periférica Vn , el sub-índice n corresponde a núcleo, (ver Fig. 6.7_1), si hacemos el cociente:
dAd
RnVn
RnRnVn
AΓ
====Γ ω
ππ
222
2
como a partir de r = Rn hacia los radios crecientes, la circulación será constante,
RnVnvr ππ 22 ==Γ la intensidad del vórtice queda definida recién a partir de la periferia del núcleo ya que en el interior el patrón de velocidad tangencial es decreciente hasta cero en el origen, porque nuestro modelo físico se comporta como un cilindro rígido en rotación, y la velocidad angular será constante, siendo las velocidades tangenciales, decrecientes hasta cero en el origen. El modelo del núcleo sólido como lo indicamos hasta ahora se genera, como veremos un poco más adelante, por la presencia de un tubo de vórtices, o tubo vorticoso, la velocidad interior será equivalente a la de un sólido rígido en rotación, las velocidades tangenciales interiores están definidas entonces por: V rω= , y en la periferia del núcleo será: nRnV ω= de manera que la rotacionalidad para la región interior al núcleo resulte, como vimos en [5.5.3]:
2 2 rot V kω ω→ → →
= =

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 6 Flujo Rotacional y Vorticidad Versión preliminar
26
En los casos reales, hay un núcleo que adapta la región de velocidad máxima y el diámetro, a partir del cual la velocidad disminuye con una razón inversa al radio hacia fuera, y linealmente hasta cero en el centro donde hay un punto de calma, y luego se produce una distribución simétrica de las velocidades en el eje opuesto. Nosotros podemos construir un modelo matemático para esta situación partiendo de las definiciones que hemos estudiado, en particular la de Tubo Vorticoso, y las conclusiones del Teorema 4. Supongamos un tramo de un tubo de vórtices cilíndrico, cuya sección recta es un círculo de radio a inmerso y rodeado por un fluido ilimitado en reposo, Fig.6.10_1. El tubo esta constituido de filamentos de
vórtice, o sea vectores vorticidad de valor constante e igual a q→ (una estructura equivalente para el campo de velocidades sería un tubo de corriente o filete). Supondremos que el vector vorticidad en cada uno de los puntos del área de cualquier sección del tubo
posee un valor constante e igual a q→ , y que en el exterior del tubo, la vorticidad es nula, como se observa en la figura 6.10_1.
Fig.6.10_1
En referencia a la parte derecha de la figura, que es una vista en corte del tubo, trazamos dos circunferencias de radios r y r’ siendo r’ < a < r. siendo V y V’ las magnitudes de las respectivas velocidades tangenciales del fluido sobre las circunferencias. Es evidente por razones de simetría que V y V’ son tangentes en cualquier punto a las circunferencias r y r’ , ya que la existencia de una componente radial implicaría la existencia de un manantial o sumidero en el origen. Apliquemos el teorema de la circulación de Stokes a dichas circunferencias,
2C A A A AV ds rotV dA rotV n dA q n dA n dAω→ → → → → → → → → →
Γ = = = = =∫ ∫ ∫ ∫ ∫i i i i i

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 6 Flujo Rotacional y Vorticidad Versión preliminar
27
se tendrá en nuestro caso, recordando que la circulación es una cantidad escalar, y también lo indicado por el teorema 4:
'
2' ( ' )c
V ds q rπ=∫ para r’< a
2( )c
V ds q aπ=∫ para r > a (ya que no hay vorticidad para r > a )
por ser V y V’ constantes en sus circunferencias c y c’. lo anterior queda:
122 ' ' ' ' ' ' ' ( )2
2 2122 ( )2
r V q r V q r V r r a
a arV q a V q V r ar r
π π ω
π π ω
= ⇒ = ⇒ = <
= ⇒ = ⇒ = > [6.10.1]
Cuando r’ = r = a → 1'2
V V a q aω= = =
por lo tanto hay un valor único de frontera de la velocidad cuando se atraviesa la circunferencia con r = a y el campo de velocidades queda así formado en dos zonas con un punto en común, se llama campo de velocidades inducidas por el tubo vorticoso. Vemos que el modelo de tubo de vorticidad, responde al modelo que requerimos. De las fórmulas [6.10.1] que nos dan la velocidad, para r > a se deduce que la velocidad inducida tiende a cero a grandes distancias del origen, y para r < a , la velocidad tiene una disminución lineal hasta cero dentro del tubo de filamentos. Las ecuaciones [6.10.1] pueden escribirse: 2 ' '
2 . 1
V rq a a
V rq a a
=
= [6.10.2]
En la primera de las [6.10.2], se dividió en ambos miembros por a , por lo cual el resultado no cambia, en la segunda se tiene en cuenta el caso particular de la frontera cuando r = a, por lo que r/a =1. Se puede confeccionar una gráfica adimensional entonces tomando las relaciones [r/a] en abscisas y [2V /qa] para ordenadas. La primera de las ecuaciones [6.10.2] corresponde a una recta de 45º y la segunda define una función que corresponde a una hipérbola equilátera que pasa también por el punto [1;1] del diagrama.

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 6 Flujo Rotacional y Vorticidad Versión preliminar
28
Fig.6.10_2
El fluido dentro del tubo tiene una velocidad proporcional a r y por tanto, se mueve como si fuera un sólido rígido que gira en torno al origen con un valor de velocidad angular ω , y la velocidad tangencial en el centro es nula por lo que deducimos que un tubo de torbellino circular no induce velocidad alguna en el centro, y ese punto no tiene tendencia a desplazarse ni velocidad rotacional infinita.
Colocando un tubo de torbellino en una corriente uniforme de velocidad →U , continuará moviéndose con
esta. Este modelo es más adecuado a la realidad física de los tornados y ojos de mar, y en menor escala a lo que ocurre al desagotar una bañera o revolver el café en un posillo. La rotación puede establecerse en el sentido de las agujas del reloj, o a la inversa dependiendo de la orientación vorticosa que se le de al tubo, los sentidos son los que se muestran en la Fig. 6.10_2 para los fenómenos atmosféricos y los desagües en el hemisferio Norte y a la inversa en el sur, esto es debido al efecto Coriolis que establece la rotación terrestre siempre que no medien perturbaciones de otro tipo, que pueden dar lugar a que se establezcan en sentidos opuestos. 6.11.- Distribución de presión en una sección plana de un torbellino circular. En referencia a la Fig.6.11_1,estando el tubo de vórtices inmerso en una región fluida sin interfase, vamos a determinar la distribución de presión para un plano z =cte y en referencia a un corte radial cualquiera normal al tubo. Llamaremos p1 a la presión absoluta en un punto cualquiera sobre el radial en el interior del núcleo de torbellino, po a la presión particular en el centro del núcleo, p a la presión absoluta en un punto sobre el radial exterior al núcleo, y p∞ a una presión exterior, en una posición sobre el plano pero muy alejada. También tomamos como hipótesis que en el contorno del núcleo, que separa las dos regiones fluidas, la presión debe variar en forma continua desde el interior hacia el exterior, luego, para r = a → p1= p. Como nuestro modelo es para flujo ideal, vamos a usar la ecuación diferencial de la cantidad de movimiento para fluido no viscoso, (Euler) [5.3.3] que repetimos aquí:
1 ( ) Va V grad V grad p g grad zt ρ
→→ → →∂= + ∗ = − −∂
[6.11.1]
Esta ecuación, admite como dijimos una segunda forma que se podía escribir a partir de la relación:, ver [5.4.1]
→→→
→→
×−=∗ VrotVVgradVgradV ]2
2[ ][

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 6 Flujo Rotacional y Vorticidad Versión preliminar
29
entonces la ecuación de Euler en la segunda forma queda:
2 1 [ ] 2
V Va grad V rotV grad p g grad zt ρ
→ →→ →→ ∂
= + − × = − −∂
[6.11.2]
Aquí vemos que si bien es un flujo ideal modelizado con viscosidad nula, se admite que posee una región rotacional generada por el tubo de vórtices dentro del núcleo, que simula una región de fluido con rotación rígida en torno a un punto central.
Fig.6.11_1
Para esta región central del núcleo es válida entonces la expresión general [6.11.2] que incluye el sumando solenoidal y el rotacional en el primer miembro. Como estamos trabajando en coordenadas cilíndricas, la expresión del gradiente en este caso será:
1p p pgrad p e e er zr r zθθ→ → →∂ ∂ ∂
= + +∂ ∂ ∂
→→→→=
∂∂
+∂∂
+∂∂
= zezezzez
rerzzgrad θθ
y las componentes de la aceleración a partir de la [6.11.1] o [6.11.2]:
gdzdp
za
adrdp
ra
−−=
=
−=
ρ
θ
ρ
10
1
[6.11.2]
Como dijimos, vamos a trabajar primero sobre el plano horizontal del torbellino, tratando de establecer las variaciones de presión indicadas en el esquema anterior, para lo cual consideramos solamente la aceleración radial. Como estamos observando la partícula desde una terna inercial, la aceleración radial de la misma es en el sentido hacia el centro de rotación o centrípeta y su valor es, de acuerdo al patrón de nuestro modelo:
2a rr ω= − igualando con el primer resultado de las [6.11.2]:
12 2dpr rdr dpdr
ω ρωρ
= → = [6.11.3]

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 6 Flujo Rotacional y Vorticidad Versión preliminar
30
que integrada nos da:
1 2 21 2
p rρω= +
si llamamos po a la presión desconocida en el origen, reemplazamos para (r = 0) y resulta que p Co = y podemos escribir la anterior como:
1 2 21 2
p p ro ρω= + [6.11.4]
Que corresponde a la distribución de presiones para la región interior al núcleo. Vamos a analizar ahora para la zona exterior al núcleo. Para esta región el flujo es por definición irrotacional, por lo cual en la [6.11.2] anulamos específicamente la componente rotacional, quedando para flujo permanente::
2 1 [ ] 2
V Va grad V rotV grad p g grad zt ρ
→ →→ →→ ∂
= + − × = − − →∂
2 1 [ ] 2
Va grad grad p g grad zρ
→→= = − − 6.11.2b]
Que según demostramos en el Módulo 5, deviene en la ecuación de Bernuolli, válida entre dos puntos cualquiera de la región irrotacional. Nosotros aquí la vamos a aplicar en referencia a la Fig.6.11_1 primero entre un punto genérico sobre el radial y otro sobre el mismo radial ubicado muy lejos del núcleo.
2 20
2p p V Vρ− − ∞∞ + = [6.11.5]
sabemos que las velocidades son tangenciales a las líneas de corriente circulares en esta región y su versor
director es eθ→
, definamos las velocidades sobre estos puntos, primero calculamos la velocidad en el punto p para este fin sabemos que:
]V aa ωθ = 22 [ ] 2a a aπ ω π ωΓ = =
]2 22
2 2a aV r r r r
π ω ωθ π π
Γ= = =
entonces reemplazando en [6.11.5], queda:
2 21 [ ]2
p a pr
ωρ ρ
∞+ = →
2 4
[ ]22ap p
rρ ω
= −∞ [6.11.6]
Este resultado corresponde a la distribución de presiones para la región exterior al núcleo.

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 6 Flujo Rotacional y Vorticidad Versión preliminar
31
En el punto de transición entre las dos zonas por la condición de que la distribución de presiones debe ser continua, podemos igualar las [6.11.4] y [6.11.6] para r = a lo que nos permitirá obtener el valor de la presión desconocida en el origen:
2 2 2 422 2
a ap po aρω ρ ω
+ = − →∞
2 2p p ao ρω= −∞ Reemplazando este resultado en la [6.11.4], queda para la distribución interior en función de los datos:
21 2 222 2 2[ ]1 2 2rp p a r p aρω ρω ρω= − + = − −∞∞ [6.11.4b]
Al efecto que la representación gráfica sea válida en forma general, adimensionalizamos tomando como ejes:
/y p p= ∞
/x r a= y llamando:
2 2akp
ρω=
∞
Entonces las ecuaciones quedan, a.- para la región interior:
2 2 1 21 [1 ( ) ]2
p a rp p a
ρω= − −
∞ ∞
que es del tipo:
1 21 [1 ( ) ]2
y k x= − −
cuando:
/ 1 1 / 2/ 0 1
r a y kr a y k
= → = −= → = −
La curva corresponde a una parábola horizontal de vértice desplazado, p∞ es la presión de remanso lejos del torbellino.

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 6 Flujo Rotacional y Vorticidad Versión preliminar
32
b.- para la región exterior:
242 11 [ ] 22 2p a a
ap p rρ ω
= − →∞ ∞
2 2 11 [ ] 222 ( / )
p ap p r a
ρ ω= −
∞ ∞
que es del tipo:
11 [ ]22y k
x= −
cuando:
/ 1/ 1 1 ( / 2)
r a yr a y k
→∞ →= = −
que corresponde a una cuadrática inversa asintótica para y = 1 ya que cuando x → ∞ , y → 1, también se observa que para x =1 ambas curvas son coincidentes, ya que y = 1 - ½ k, es fácil demostrar que las tangentes en ese punto son también coincidentes, tratándose de un punto de inflexión. La conclusión inmediata del esquema es que las partículas fluidas encontrarán un tobogán de presión hacia el centro lo que inducirá un comportamiento como si hubiese un sumidero en el origen dando lugar a una combinación de velocidad en espiral cerrada hacia el centro. La representación final de la distribución de presiones para un eje radial se da en la Fig 6.11_1 siguiente:
Fig.6.11_1
6.12.- Núcleos huecos para torbellino circular. Observando un poco los resultados obtenidos en el punto anterior, vemos que la presión en el centro de la masa fluida resulta ser una presión absoluta mayor que cero, ya que:
1 [1 ]p k p p kp
= − → = −∞∞

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 6 Flujo Rotacional y Vorticidad Versión preliminar
33
Para que esto ocurra, k debe ser un valor definido entre 0 y 1, pero si k > 1, la presión en el centro resulta tener un valor negativo, por tratarse de una presión absoluta esto carece de sentido físico, sin embargo, el establecimiento de la condición k > 1, resulta ser:
2 21ak
pρω
= >∞
[6.12.1]
operando, queda:
2 2a pρω > ∞ Esta última condición, puede establecerse sin problemas para el modelo, entonces para conciliar los resultados con la realidad física concluimos que un modelo bajo estas condiciones, implica que presentará un hueco concéntrico que no contiene fluido. Tal esquema nos conduce más al modelo de lo observado para algunos fenómenos naturales como tornados, vaciados por sumidero y ojos de mar. El análisis de las funciones adimensionalizadas para un k >1 , nos permitirá graficar la situación.
Fig.6.12_1
En particular para k=2, reemplazando en la ecuación [6.12.1], nos da la distribución de la Fig.6.12_2 , el
reemplazo de k =2 en 1 2[1 ]2
y k k x= − + , permite verificar que si x = 1 → y = 0, o sea que para este
valor particular de k =2, se tiene un espacio cilíndrico hueco coincidente con diámetro el núcleo vorticoso que hemos tomado en el modelo, obteniendo un espacio cilíndrico hueco sin fluido, en torno al cual existe un movimiento irrotacional cíclico.

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 6 Flujo Rotacional y Vorticidad Versión preliminar
34
Fig.6.12_2 6.13.- Torbellino de Rankine. A diferencia del caso anterior en el que el tubo de vórtices estaba inmerso en el fluido sin interfase y no teníamos en cuenta la gravedad, el modelo del torbellino de Rankine es un tubo vorticoso de eje vertical situado en un fluido que se mueve bajo la acción del gradiente de presión y la gravedad y presenta una superficie de interfase horizontal expuesta a la atmósfera. Fig. 6.13_1.
Fig.6.13_1
Situamos el origen de la terna inercial en el eje del torbellino, el torbellino termina en el límite de la interfase inferior, o sea en el plano del nivel de interfase, en este caso, las velocidades serán: V rωθ = si r < a
2aVr
ωθ = si r >a
Como antes, vamos a definir un punto p, dentro de la masa de fluido para r > a, como antes, para esta región de fluido irrotacioanal es válida la aplicación de la ecuación de Bernuolli entre el citado punto y uno sobre la superficie de interfase muy alejado, por tanto:
2 41 ( 0) 022p p a g z
rω
ρ− ∞ + + − + = →

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 6 Flujo Rotacional y Vorticidad Versión preliminar
35
2 41
22ap p g zr
ω ρ ρ= − +∞ [6.13.1]
Ahora definimos un punto interior al tubo de vórtices dentro de la masa del fluido, o sea en la región r < a y z < 0. ; en esta región rotacional aplicamos la ecuación de Euler sin restricción, entonces, aplicando la misma según sus componentes: 1 1 2p r
rω
ρ∂
=∂
1 1p gzρ
∂=
∂
componiendo ambas obtenemos la diferencial total:
21dp r dr g dzρ ω ρ= + que integrada nos da:
221 2
rp g zρ ω ρ= + + [6.13.2]
Para obtener la constante, analizamos un punto de la frontera entre ambas regiones, para r = a, z = 0, en este punto p = p1 entonces:
2 2 2 41 22 2
a ap p pa
ρ ω ρω= = + = − →∞
2 2 2 4 2 2[ ]22 2a ap p a
aρ ω ρω ρω= − + = −∞ ∞
Reemplazando en la [6.13.2], queda:
2 222 2 2 2[ ] [1 ]1 22 2r rp p a g z p g z a
aρ ωρω ρ ρ ρω= − + + = + − −∞∞ [6.13.3]
En la superficie libre 1p p= ∞ , ya que p∞ es la presión atmosférica entonces a partir de la anterior:
22 2[1 ]22rg z aa
ρ ρω= − →
2 2 2 22 2[1 ] [1 ]2 22 2r a rg z a za g a
ωω= − → = − que es válida para r < a. [6.13.4]
y en la superficie libre para r > a , reemplazamos en la [6.13.1], observe que no hacemos z = 0, ya que admitimos que la superficie libre puede no estar sobre el plano de la interfase, quedando:

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 6 Flujo Rotacional y Vorticidad Versión preliminar
36
2 4 2 41 1
2 22 2a ag z zr g r
ω ρ ωρ = → = [6.13.5]
Las [6.13.4] y la [6.13.5] nos permiten graficar la superficie libre en función de los datos del tubo vorticoso que define el modelo, es decir la velocidad angular del núcleo y el radio. La Fig:6.13_2, representa la superficie libre en el modelo, ahora la curva muestra la superficie libre entre las interfases y no un diagrama de presiones de la masa fluida como en el punto anterior.
Fig.6.13_2
Para obtener la profundidad en el centro, basta hacer r = 0 en la ecuación [6.13.4] con lo cual:
2aOA gω
=
En la que se ve que cuanto mayor sea ω mayor será la profundidad. 6.14 Repaso de Definiciones. a.- Filamento Vorticoso:
Son aquellos que en cada punto tienen por tangente al vector 2q ω→ →
= , y cumplen con la ecuación:
0q ds→ →
× = siendo ds→
un desplazamiento sobre la curva. b.- Lámina vorticosa o superficie vorticosa: Es aquella formada por filamentos vorticosos que se apoyan en una línea base o directriz cualquiera, la lámina vorticosa puede ser cerrada dando lugar a un tubo vorticoso hueco. c.- Tubo vorticoso: Es un conjunto de filamentos vorticosos que pasan a través de cada punto de una superficie acotada por una curva simplemente conexa del fluido, la vorticidad se halla distribuida en un dominio finito. d.- Filamento vorticoso: Análogamente a la definición anterior pero cuando la superficie cerrada es diferencial : dA.
INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 6 Flujo Rotacional y Vorticidad Versión preliminar
37
e.- Intensidad de filete y tubo vorticoso. demostramos que: e1.- la circulación es nula a lo largo de una línea cerrada cualquiera trazada sobre una superficie vorticosa, e2.- la circulación es Cte. cuando es calculada a lo largo de una línea cerrada cualquiera que rodea a un tubo vorticoso. Denominamos intensidad de un tubo vorticoso al flujo de vorticidad medido a lo largo de cualquier línea cerrada que rodea dicho tubo y es una magnitud escalar; La intensidad del tubo vorticoso se define a través de la expresión del Teorema de Stokes como:
2C A A A AV ds rotV dA rotV n dA q n dA n dAω→ → → → → → → → → →
Γ = = = = =∫ ∫ ∫ ∫ ∫i i i i i [6.8.1]
Como el vector q→
es normal a cada da subtendido por la curva c , la intensidad queda:
2AA
q n dA q dA q A Aω→ →
Γ = = = =∫ ∫i [6.8.1b]
f.- Intensidad de Vórtice.(Circulación). Observando la equivalencia entre el concepto de línea de corriente y línea vorticosa si en la expresión [6.8.1b] cuando A → 0 entonces q → ∞ y la intensidad Γ se mantiene constante, o sea el filete se transforma en un vórtice pero la intensidad del mismo es finita e igual a Γ.
En el límite tendemos a una línea o hilo de vórtice tangente en cada punto, a un vector q→
de módulo ∞ que representa por lo tanto una singularidad en el campo de movimiento, pero a esta línea, esta ligada una intensidad de valor finito Γ. Si el tubo de vórtice se deforma de manera que el área dA no se reduzca a un punto sino a una línea abierta, de manera que su intensidad se mantenga constante e iguala Γ, en el limite tendremos una lámina vorticosa Con las consideraciones anteriores, podemos definir analíticamente al vórtice como una línea singular sumergida en un campo irrotacional de fluido a lo largo de la cual se concentra la rotacionalidad puntual o vorticidad, la vorticidad puntual induce un campo de velocidades irrotacional salvo en el punto singular. En estos casos es interesante aplicar el concepto de circulación, la circulación calculada a lo largo de una línea cerrada cualquiera en un campo de movimiento irrotacional es nula si no hay un flujo de vorticidad a través de la sección que tenga a la línea como contorno, pero si hay un vórtice sumergido de intensidad Γ que atraviesa la sección, y se calcula ahora la circulación en la línea cerrada de enlace a través del teorema de Stokes, vemos que ningún elemento de área de la superficie aporta circulación , salvo el elemento de área del punto singular donde el vórtice intersecta, y este punto da un aporte Γ.

INTRODUCCION A LA MECANICA DE FLUIDOS _ Ing.Jorge Rosasco
MOD 6 Flujo Rotacional y Vorticidad Versión preliminar
38
Concluimos que la circulación a lo largo de una línea que enlaza a un vórtice sumergido en un campo irrotacional, es igual a la intensidad del vórtice mismo. Entonces definimos al vórtice analíticamente, como aquellas líneas singulares sumergidas en un campo irrotacional de fluido incompresible a lo largo de las cuales se concentra la vorticidad y que produce un campo de velocidades circunferenciales dadas por
rV
2πθΓ
=
[]

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
Mod 7. Flujo Potencial Versión preliminar
1
7 FLUJO POTENCIAL INCOMPRESIBLE. En el Módulo 1 mencionamos que cuando un objeto es embestido por una corriente, fuera de una zona próxima a la superficie del cuerpo llamada capa límite, pueden considerarse despreciables los gradientes de velocidades transversales a la corriente, entre capas próximas y considerar aproximadamente que el flujo no está sometido a fricción fuera de la proximidad al límite sólido, y por tanto considerarlo irrotacional, si además el flujo cumple con la ecuación de continuidad, es permanente e incompresible, se lo denomina Flujo Potencial. Aquí nos limitaremos tan solo a dar una referencia global sobre el manejo de los flujos potenciales o flujos con potencial, recomendando que este tema se profundicen más con la bibliografía de la referencia. 7.1 Condiciones de borde para Flujo Potencial. (Principios secundarios) Las condiciones necesarias básicas que vamos a tomar en este caso para el estudio introductorio de flujo potencial son:
a.- Bidemensionalidad. Todas las propiedades y características del flujo son independientes de una de las coordenadas espaciales. O sea tenemos un movimiento bidimensional en el que cada partícula se mueve por ejemplo, paralelamente a un plano fijo, (x,y) y las velocidades de todas las partículas homólogas en profundidad, tienen la misma velocidad dirección y sentido. Es decir el campo es de vectores paralelos homólogos en z desde -∞ a + ∞ . A veces a este espacio donde la ocurrencia del los campos de velocidades y presiones se repite sin cambios para todos los planos homólogos z, paralelos a (x,y) desde -∞ a + ∞ se lo llama 2D. o Riemann 2.
La restricción a dos dimensiones, asegura un análisis matemático fácil de manejar, aunque el potencial de velocidad se puede definir para cualquier flujo irrotacional, incluso en 3D, el término se asocia en general a flujo incompresible irrotacional en dos dimensiones. Ejemplo: el flujo en torno a un cilindro muy largo embestido por una corriente en forma normal al eje, y en las proximidades de la sección media, puede ser estudiado con análisis 2D, como si el largo del cilindro fuera infinito y todas la secciones normales tuvieran idéntico escurrimiento del flujo. Para el análisis del flujo en torno a una esfera u otros cuerpos de revolución se requiere análisis 3D que también se denomina en estos casos flujos axi-simétricos. b.- Incompresibilidad,. la densidad es constante para todo punto ρ = Cte, / 0tρ∂ ∂ = o bien si es un gas por ejemplo aire, el campo posee velocidades relativamente bajas, (el número de Mach M< 0.3,) es decir la suposición de flujo incompresible , este rango es válido para aerodinámica subsónica. c.- Flujo permanente, / 0N t∂ ∂ = para toda propiedad N escalar o vectorial del flujo y para todo punto del campo en estudio, las propiedades y características del flujo en todo punto, son independientes del tiempo.
d- Irrotacionalidad. 0=→Vrot en general esto implica un flujo no-viscoso y o un flujo de muy baja
viscosidad cuyas partículas se estén moviendo inicialmente sin rotación.
e.- Condición de gas perfecto. Para flujo potencial de gases, estos se consideran perfectos es decir cumplen la relación RTpv = (v = volumen específico), la presión que aparece en las ecuaciones es la presión termodinámica y se considera igual a la tensión normal sobre en todo punto del flujo en cualquier orientación, ya sea que este en reposo o en movimiento, la temperatura permanece constante en todo punto del campo, e igual a la que posee la corriente en infinito.

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
Mod 7. Flujo Potencial Versión preliminar
2
7.2.- Discusión de los cuatro principio básicos para flujos potenciales. a.- Conservación de masa.- De la aplicación de b y c , se desprende que, como la ecuación diferencial de la continuidad era :
→=∗∇+∂∂
→=∗∇+∂∂ →
→→
→
0 0) ( VtVV
tV ρρ
a partir de las condiciones a y b, deducimos entonces que para nuestro caso:
0 bien, o 0 ==∗∇→→
VdivV que para un flujo bidimensional puede expresarse como:
0=∂∂
+∂∂
yv
xu
b.- Conservación de la cantidad de Movimiento. En el Módulo 5 de Ecuaciones Diferenciales desarrollamos la Ecuación de Euler, valida para flujo ideal:
pgradzgradgVgradVtV
ρ1)( −−=∗+
∂∂ →→
→
Si consideramos que el flujo es permanente, y por otra parte escribimos el término entre paréntesis en su otra forma (corolario 2 de la Ec. de Euler), queda:
pgradzgradgVrotVVgradρ1 )
2
2( −−=×−
→→
Considerando la irrotacionalidad y la incompresibilidad del flujo:
2 1( )
22
02
Vgrad g grad z grad p
V pgrad g z
ρ
ρ
= − − →
+ + =⎛ ⎞⎜ ⎟⎝ ⎠
La que podía integrarse para ρ=cte como es el caso, y se llegaba a la Ecuación de Bernuolli, válida entre dos puntos cualquiera del campo, ésta es por tanto de aplicación para los flujos potenciales.
Ctezgp
V =++ρ
221
Observamos que mediante esta fórmula es fácil el cálculo de presiones una vez establecida la distribución de velocidades, ya sea para flujos interiores o exteriores. c.- Primer Principio de la Termodinámica. En el Módulo de ecuaciones Integrales también vimos como se podía llegar a la ecuación de Bernuolli, en ausencia de intercambio de Calor y Trabajo y ausencia de variaciones de la energía interna si no existen fuerzas de fricción, e intercambio de calor hacia el seno del fluido. es decir si se satisface la ecuación de Cantidad de Movimiento se satisface automáticamente el Primer Principio.

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
Mod 7. Flujo Potencial Versión preliminar
3
d.- Segundo Principio de la Termodinámica. En ausencia de Intercambio de calor y trabajo con el medio ambiente, no existe limitación impuesta por el segundo principio. El Primer Principio, estipula que durante cada uno de los procesos que ocurran en el sistema, habrá de considerarse el balance de todas las energías. El segundo Principio, impone restricciones sobre el sentido de los intercambios en que se transfiere la energía ,o sea el sentido en que se realizará un proceso real. (Por ejemplo el calor se transfiere en el sentido de la región de alta a la baja temperatura y no al revés) también nos dice que los efectos de rozamiento, hacen impracticables los procesos reversibles. Pero para flujos incompresibles y no viscosos como son nuestras hipótesis para este flujo teórico que llamamos Flujo Potencial se satisface intrínsecamente el segundo Principio, o mejor dicho el mismo no impone ninguna restricción , ya que solamente habrá intercambio de Energía Cinética y Potencial , con ausencia de rozamiento y transferencia de calor; las transformaciones son reversibles y los procesos de duración finita manteniendo constante la Entropía son posibles. 7.3.- Definición de Potencial de Velocidades. Aplicando la condición de irrotacionalidad, junto con la definición de rotacional aplicada al campo de velocidades, y llamando u y v a las componentes de la velocidad de la partícula en movimiento 2D:
yu
xv
yu
xvk
yu
xv
vuzyx
jji
Vrot∂∂
=∂∂
→=⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
−∂∂
→=⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
−∂∂
→=∂∂
∂∂
∂∂
=→→
000
0
[7.3.1]
Como por la segunda identidad del análisis vectorial teníamos comparando:
φφ gradVVrotgradrot =→=→=→→
0 al,irrotacion es campo el como0)( , existirá entonces para la condición de nulidad del rotacional, un campo potencial a partir del cual puede generarse nuestro campo de velocidades.
Si para este campo de velocidades →→→
+= jviuV , podemos encontrar una función escalar Φ que haga
cumplir la condición anterior, y como: φgradV =→
, obtenemos por comparación las componentes u y v , a partir de la expresión del gradiente aplicada a la función escalar Φ :
022
[7.3.1] aplicandoy
=∂∂
∂−
∂∂∂
→
∂∂
=
∂∂
=
xyyxy
v
xu
φφφ
φ
[7.3.1b]
Se puede demostrar fácilmente que para el campo de velocidades que satisface las condiciones de flujo
potencial, se puede tomar: bien o φφ gradVgradV −==→→
La condición [7.3.1b] se cumple si Φ es una función continua y derivable con continuidad. A tal campo escalar se lo llama Potencial del campo vectorial de velocidades si es que existe, o Función Potencial,. La aplicación del Principio de Conservación de masa o continuidad dará para el caso incompresible::

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
Mod 7. Flujo Potencial Versión preliminar
4
022
22
y
y
x
xyx
0 =∂∂
+∂∂
=⎥⎦
⎤⎢⎣
⎡∂∂
∂∂
+⎥⎦⎤
⎢⎣⎡∂∂
∂∂
=∂∂
+∂∂
→=→
yxvuVdiv φφφφ
lo que indica también que el campo escalar o Función Potencial es una función armónica, (recordamos que una función armónica es aquella que satisface para un campo escalar la ecuación de Laplace 02 =∇ φ ). Asimismo, la función potencial de velocidades es una función Φ(x,y) El potencial de velocidades se define a partir de la irrotacionalidad del flujo, y la armonicidad, o cumplimiento de la Laplaciana, y de la aplicación de la continuidad para flujo incompresible y permanente. 7.4.- La Función Corriente. En flujo incompresible permanente, las líneas de corriente , las de trayectoria y las de traza, coinciden, por tanto no pude fluir materia a través de las líneas de corriente ya que por definición las velocidades de las partículas son tangentes a ellas manteniendo el vector su valor en cada punto cuando trascurre el tiempo, o
sea que se cumple para toda trayectoria diferencial ds→
sobre la línea de corriente:
0=×→→
dsV de la cual se deducen las ecuaciones diferenciales de las líneas de corriente, según vimos en el Módulo 1, que para el caso 2D es una sola:
uv
dxdy
= [7.4.1]
Además por lo indicado por la Ecuación de Continuidad, entre dos líneas de corriente dadas circulará un caudal único. En la Fig 7.4_1 hemos representado dos líneas de corriente en flujo bi-dimensional, y dos curvas arbitrarias entre los puntos 1 y 2, pertenecientes a sendas líneas de corriente, es fácil ver que el caudal que atraviesa estas curvas arbitrarias entre las posiciones 1 y 2 es igual para ambas, y su valor lo llamamos q12 =Ψ2 - Ψ1, los valores de Ψ2 y Ψ1 son constantes arbitrarias siempre que Ψ2 - Ψ1 = q12 es decir siempre que la diferencia sea el valor del caudal entre ambas líneas de corriente. En general a Ψ se la llama función corriente. Fig.7.4_1 Cabe acotar que cada una de las curvas dibujadas, puede imaginarse como la directriz de una superficie cilíndrica de generatrices paralelas al eje z, por lo cual la región limitada entre las dos superficies Ψ, da lugar a un volumen fijo por unidad de profundidad según z.

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
Mod 7. Flujo Potencial Versión preliminar
5
Como el flujo es incompresible, y por la ecuación de continuidad, el caudal que pasa por la superficie 1-2 izquierda es igual al que pasa por la superficie 1-2 derecha o sea q12i = q12d, en lo cual hemos llamado q al caudal másico por unidad de profundidad z. Con la anterior definición no hay duda de que a las líneas de corriente las podemos caracterizar por funciones Ψ (x , y) = C y por tanto la derivada de esta función constante respecto al tiempo será cero:
y
xdxdydy
ydx
x∂
∂∂
∂−=→=
∂∂
+∂∂
ψ
ψψψ 0
por comparación con la ecuación de línea de corriente bi-dimensional [7.4.1] que era a su vez:
uv
dxdy
=
resulta:
uy
vx
ψ
ψ
∂=
∂∂
= −∂
[7.4.2]
haciendo referencia a la la figura 7.4_1, para el caudal a través de cada porción diferencial de la curva 1- 2, el pasaje a velocidad u por dy, aumenta el caudal, mientras que la componente v que pasa por dx lo disminuye, tendremos entonces:
2 2 2
1 1 12 112Q udy vdx dy dx d
y xψ ψ ψ ψ ψ∂ ∂
= − = + = = −∂ ∂∫ ∫ ∫
Siendo Ψ2 - Ψ1 =Q12 un valor constante, resulta evidente que Ψ2 y Ψ1 también lo son individualmente, y como estamos trabajando con flujo bi-dimensional y ambas funciones representan líneas de corriente, podemos deducir que siempre las funciones de corriente tendrán la forma Ψ(x,y) = C., el valor de la constante puede ser arbitrario a condición que su diferencia sea Q(1-2) Ejemplo: Supongamos el caso particular de la distribución para el campo de velocidades siguiente:
Ctexyxdxydyxdxydy
xvyu
=−→=−→=−→⎭⎬⎫
==
∫ ∫ 22
22
00
Si aplicamos la condición de irrotacionalidad , a las relaciones [7.4.2] queda:
022
22
022
22
0)( =∂∂
+∂∂
→=∂∂
−∂∂
−→=−=→
yxyxdydu
dxdvVrot
ψψψψ
de donde deducimos por esta última condición que la función corriente Ψ es también una función armónica, ya que cumple con la ecuación de Lapalace: 02 =∇ ψ .

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
Mod 7. Flujo Potencial Versión preliminar
6
La función corriente, se define a partir de la permanencia del flujo, y la armonicidad, o sea el cumplimiento de la condición de Laplace, a partir de la irrotacionalidad. 7.5.- Las identidades Cauhy-Riemann. Como de acuerdo a las definiciones anteriores [7.3.1] y [7.4.2], resulta:
xy
yx
xv
yu
yv
xu
∂∂
−=∂∂
∂∂
=∂∂
→
⎪⎪⎭
⎪⎪⎬
⎫
∂∂
−=
∂∂
=
⎪⎪⎭
⎪⎪⎬
⎫
∂∂
=
∂∂
=
ψφ
ψφ
ψ
ψ
φ
φ
Estas dos últimas expresiones se conocen como identidades de Cauchy – Riemann . Como para ambas funciones CteyxCteyx == ),( ,),( ψφ según vimos, se cumple que derivando ambas, como están igualadas a una constante dΦ = 0 entonces:
kdxdy
y
xx
y
y
xCtedx
dy
y
xCtedx
dy
dyy
dxx
dyy
dxx
=
−=
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
∂∂
∂∂
−
=
∂∂
∂∂−
=
∂∂
∂∂
==
∂∂
∂∂
==
→
⎪⎪⎭
⎪⎪⎬
⎫
=∂∂
+∂∂
=∂∂
+∂∂
φφ
φφ
φ
ψ
ψ
ψ
φ
φ
φ
ψψ
φφ
1 1
:segunda la de
:primera la de
0
0
Con lo cual vemos que las tangentes son ortogonales ya que en el punto común A las coordenadas de los puntos Ψ = Cte , y Φ =Cte, son idénticas y los segundos miembros de las ecuaciones anteriores que dan las pendientes de las curvas en A, son uno recíproco del otro y con signo opuesto. Fig.7.5_1. Demostramos así que las líneas de potencial y de corriente en cada punto, se cortan ortogonalmente, como A es arbitrario, concluimos que la totalidad de las líneas de ambas familias conforma una red ortogonal. Fig.7.5_1

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
Mod 7. Flujo Potencial Versión preliminar
7
7.6.- Resumen de propiedades de los flujos potenciales. Podemos definir las siguientes: a.- Las curvas o funciones Ψ =Cte , y Φ = Cte forman familias ortogonales en el plano. b.- la aplicación de las ecuaciones de condición:
0
0
=
=→
→
Vrot
Vdiv
dan lugar a:
0202
=∇=∇
ψφ
Las funciones potencial y corriente deben ser armónicas, por tanto deben ser continuas, y derivables con continuidad. c.-La ecuación diferencial de la cantidad de movimiento, para flujo incompresible e irrotacional, (Ec de Euler), da lugar a la ecuación de Bernuolli para línea de corriente, es decir los lugares, Ψ = Cte la cumplen. Como la rotacionalidad nula está asegurada la Ecuación de Bernuolli será aplicable entre dos puntos cualquiera del campo. d.- La aplicación del primer principio de la Termodinámica a un volumen de control que contenga un tubo de corriente en las condiciones adoptadas para este tipo de flujo, también conduce a la ecuación de Bernuolli, o sea que si se satisface para flujo potencial la ecuación de cantidad de movimiento, (Bernuolli) también se satisface la de energía e.- El segundo principio en ausencia de fricción y por tanto procesos irreversibles de transmisión del calor, no agrega restricciones. f.- Además de ser armónicas las funciones potencial de velocidad y corriente, de un flujo potencial deben cumplir también las condiciones de límites de pared si hay un obstáculo. La condición de obstáculo es tal que sobre la superficie límite del obstáculo, las componentes normales de la velocidad deben ser nulas ya que el obstáculo en si debe ser tomado como una línea de corriente límite, porque que no puede pasar flujo a través de él (igual condición que para las líneas de corriente) , no obstante no hay restricción a la velocidad tangencial aún sobre la pared ya que el flujo ideal no se adhiere a la pared, y en el análisis por flujo potencial no se toma en cuenta la condición de no-deslizamiento, o sea esta permitida una velocidad tangencial en contacto con el objeto. Lo que implica que se cometerán errores en algunas zonas del campo fluido muy próximas al objeto al usar el tratamiento con flujo potencial. Tome en cuenta que los flujos potenciales son una idealización matemática cuyo rango de aplicación con poco error, es la obtención de los campos de velocidades y presiones en las proximidades de los objetos pero no en regiones tan próximas como el entorno interior de las capas límites reales donde el error sería apreciable. Llamando con el subíndice b (body), a los puntos sobre un obstáculo sólido, será entonces (en referencia a la Fig 7.6_1.).:

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
Mod 7. Flujo Potencial Versión preliminar
8
0 =⎥⎦
⎤⎢⎣
⎡∂∂
=⎥⎦
⎤⎢⎣
⎡∂∂
=bsbn
vψφ
n y s son las coordenadas intrínsecas de un punto sobre la superficie del cuerpo en la dirección normal y tangencial, lo que indica que el objeto coincide con una línea de corriente. A gran distancia del obstáculo:
x
x
∞−→⎥⎦
⎤⎢⎣
⎡∂∂
=∞−→⎥⎦
⎤⎢⎣⎡∂∂
=∞=yx
Vu ψφ
Fig:7.6_1. g.- Tendremos siempre en cuenta que: la función corriente ψ existe sea o no potencial el flujo, siempre que sea permanente; y que la función potencial existe solamente si el flujo es potencial. 7.7..- Patrones de Flujo Simples. 7.7.1.- Transformación a coordenadas cilíndricas en el plano. La figura 7.7_1 muestra un punto genérico del campo de velocidades de un flujo potencial, de coordenadas (x,y), en dicho punto, las componentes cartesianas de la velocidad son u y v. En coordenadas polares, el punto estará definido por el radio-vector de módulo r y argumento Θ, el vínculo entre ambos sistemas y en referencia a la figura, estará dado por:
xy
tgarc
yxr
ryrx
=
+=
==
θ
θθ
22sin.cos.
Fig.7.7_1 Entonces, podemos escribir, siendo r y Θ funciones de x e y ,

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
Mod 7. Flujo Potencial Versión preliminar
9
θθθθφ
θφθφθ
φθ
φθφ
θθφ
θφθφφφφ
rVvur
ry
rx
yy
xx
Vrvur
yxry
yrx
xr
=+−=∂∂
→∂∂
+−∂∂
=∂∂
∂∂
+∂∂
∂∂
=∂∂
=+=∂∂
→∂∂
+∂∂
=∂∂
∂∂
+∂∂
∂∂
=∂∂
)cos.sin(
cos)sin(
sin.cos.
sincos
O sea las fórmulas finales que vinculan las velocidades en coordenadas polares con la función potencial serían:
)(1
)(
θφ
θ
φ
∂∂
=
∂∂
=
rV
rrV [7.7.1a]
Operando análogamente para la función de corriente en coordenadas polares resulta:
rrV
rrrV
∂∂
−=∂∂
=
∂∂
=∂∂
=
ψθφ
θ
θψφ
)(1
)(1)( [7.7.1b]
7.7.2.- Patrón 1 de Flujo simple: Flujo Uniforme.
Supongamos que el flujo venga definido por el campo →→
∞= iVV , en este caso las componentes de velocidad del campo son:
0=∞=
vVu
de donde:
)(0
)(0
xfyVdyV
xv
Vy
u
yfxVdxV
yv
Vx
u
+∞=∞=→
⎪⎪⎭
⎪⎪⎬
⎫
=∂∂
−=
∞=∂∂
=
+∞=∞=→
⎪⎪⎭
⎪⎪⎬
⎫
=∂∂
=
∞=∂∂
=
∫
∫
ψψ
ψ
φφ
φ
[7.7.2]
Ahora bien, como en la primera de las [7.7.2]

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
Mod 7. Flujo Potencial Versión preliminar
10
Cteyfyfyfy
=→=→+=→=∂∂ )(0)(')´(00 φφ
Ctexfxfxfx
=→=→+=→=∂∂ )(0)(')´(00 ϕψ
Con lo cual, podemos escribir:
CteyVCtexV+∞=+∞=
ψφ
[7.7.2b]
Siempre podemos elegir el sistema de coordenadas de manera que las constantes sean cero., entonces, dando valores constantes diferentes positivos y negativos tanto a ψ como a Φ, obtendremos las familias de funciones ortogonales, y una malla ortogonal, dibujada en la Figura 7.7_1, Para obtener la red, damos valores diferentes a Ψ = ki , y Φ =ki , basta simplemente con reemplazar estos valores numéricos para las coordenadas x e y en las expresiones [7.7.2b], en este caso obtenemos las ecuaciones de las familias:
CteVkiy
CteVkix
=∞
=
=∞
= ,
que es la representación de la Fig.7.7_1. También operando con los resultados anteriores vemos que:
02
0
02
=∂∂
∂→=
∂∂
=∂∂
∂→∞=
∂∂
yxy
yxV
xφφ
φφ
por tanto este potencial, satisface la condición de armonicidad. Fig.7.7_1 En este ejemplo, el caudal entre dos líneas de corriente será:

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
Mod 7. Flujo Potencial Versión preliminar
11
)12(12122,1
2
1
yyVyVyVd −∞=∞−∞=−== ∫ ψψψψ
Patrón de Flujo uniforme en coordenadas cilíndricas. El patrón de flujo simple. Indicado en coordenadas cilíndricas, sería, aplicando los resultados [7.7.1]:
θψθφ
sincos
rVrV
∞=∞=
7.7.2.- Patrón 2 de Flujo simple : Flujo Uniforme formando un ángulo α. En este caso sería, (Fig: 7.7_2):
yVv
xVu
∂∂
=∞=
∂∂
=∞=
φα
φα
sin
cos
Entonces:
)sincos()sincos(
ααψααφ
xyVvuyxVvu
−∞=−=+∞=+=
y en coordenadas cilíndricas:
)sincoscossin()sinsincoscos(
αθαθψαθαθφ
rrVvurrVvu
−∞=−=+∞=+=
[7.7.3]
Fig:7.7_2
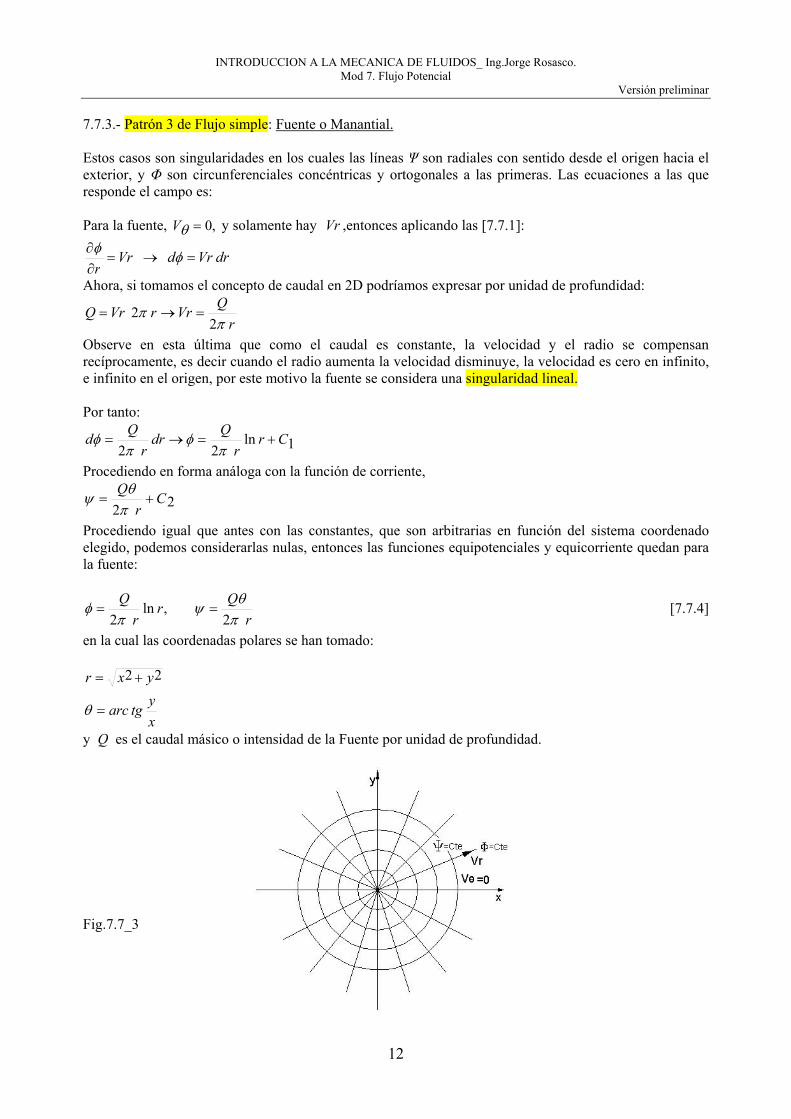
INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
Mod 7. Flujo Potencial Versión preliminar
12
7.7.3.- Patrón 3 de Flujo simple: Fuente o Manantial. Estos casos son singularidades en los cuales las líneas Ψ son radiales con sentido desde el origen hacia el exterior, y Φ son circunferenciales concéntricas y ortogonales a las primeras. Las ecuaciones a las que responde el campo es: Para la fuente, ,0=θV y solamente hay Vr ,entonces aplicando las [7.7.1]:
drVrdVrr
=→=∂∂ φφ
Ahora, si tomamos el concepto de caudal en 2D podríamos expresar por unidad de profundidad:
rQ
VrrVrQπ
π2
2 =→=
Observe en esta última que como el caudal es constante, la velocidad y el radio se compensan recíprocamente, es decir cuando el radio aumenta la velocidad disminuye, la velocidad es cero en infinito, e infinito en el origen, por este motivo la fuente se considera una singularidad lineal. Por tanto:
1ln22
Crr
Qdr
rQ
d +=→=π
φπ
φ
Procediendo en forma análoga con la función de corriente,
22C
rQ
+=πθ
ψ
Procediendo igual que antes con las constantes, que son arbitrarias en función del sistema coordenado elegido, podemos considerarlas nulas, entonces las funciones equipotenciales y equicorriente quedan para la fuente:
rQ
rr
Qπθ
ψπ
φ2
,ln2
== [7.7.4]
en la cual las coordenadas polares se han tomado:
xy
tgarc
yxr
22
=
+=
θ
y Q es el caudal másico o intensidad de la Fuente por unidad de profundidad. Fig.7.7_3

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
Mod 7. Flujo Potencial Versión preliminar
13
7.7.4.- Patrón 4 de Flujo simple: Sumidero o pozo. Este patrón resulta ser idéntico al anterior con signos opuestos, ya que las líneas de corriente son radiales en este caso, pero ahora convergiendo hacia el centro, las ecuaciones finales para sumidero serán entonces:
rQ
rr
Qπθ
ψπ
φ2
,ln2
−=−= [7.7.5]
Fig.7.7_4 En la figura siguiente 7.7_4 se da una representación del sumidero lineal. Puede demostrarse fácilmente que los grupos de funciones [7.7.4] y [7.7.5], cumplen la condición de armonicidad, que en coordenadas cilíndricas bidimensionales es:
022
21
22102
22
2=⎟⎟
⎠
⎞⎜⎜⎝
⎛∂∂
+⎟⎠
⎞⎜⎝
⎛∂∂
→=∂∂
+∂∂
θφφψφ
rrryx
Las rectas radiales de las líneas de corriente vienen dadas por la ecuación:
CteQ
=θπ2
que en coordenadas polares son rectas que parten o convergen al origen, mientras que las líneas de equipotencial vienen dadas por:
CterQ
= ln2π
que son circunferencias concéntricas. Las componentes radial y tangencial de la velocidad, vienen dadas por:
0
2
=∂∂
=
=∂∂
=
θφ
θ
πφ
rV
rQ
rVr
Aplicando los resultados anteriores, podemos calcular el caudal total que como es lógico es:

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
Mod 7. Flujo Potencial Versión preliminar
14
Qrdr
QrdVrq === ∫∫ππ
θπ
θ2
0
2
0
2
siendo el resultado para el sumidero, el mismo valor pero negativo: -Q,; también el caudal es constante para cada sector comprendido entre dos rayos. Si calculamos la circulación respecto del origen, de acuerdo a la definición que habíamos dado de la misma:
0 2
0
==×=Γ ∫∫→→ π
θθ rdVldV
O sea, el flujo de la fuente o el sumidero tienen circulación nula sobre todos los circuitos cerrados posibles, incluso si estos rodean al origen. 7.75.- Patrón 5 de Flujo simple: Hilo de Vórtice ubicado en el origen en la dirección z. Si en las ecuaciones anteriores invertimos los roles de las funciones Φ y Ψ utilizadas para los modelos de fuente y sumidero, obtendremos las ecuaciones del hilo de vórtice en el origen , esto es:
⎪⎪⎭
⎪⎪⎬
⎫
Γ=
Γ=
r ln2
2
πψ
θπ
φ
Ahora, las líneas de corriente son circunferencias concéntricas y el valor de la velocidad será:
0 2
=
Γ=
rVr
Vπθ [7.7.6]
En las ecuaciones anteriores, podemos reemplazar circulación por caudal en base a que:
Qrdr
QrdVsdV ===∗=Γ ∫∫∫
→→θ
πθθ
ππ
2
2
0
2
0
Los resultados [7.7.6] ya habían sido obtenidos en la sección 6.5, no estaría mal pegarles una mirada. En la figura, la línea de vórtice es entrante hacia el papel, circulación dextrógira, o a derecha, si la línea de vórtice está saliendo del papel, la circulación es levógira o a izquierda. Fig. 7.7_4

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
Mod 7. Flujo Potencial Versión preliminar
15
Es fácil probar que la circulación y la verticidad es cero para cualquier línea cerrada que no incluya al origen. 7.8.- Modelos obtenidos con Superposición. El principio de superposición es válido por la condición de Laplace y el corolario del mismo que nos indica que si dos o más funciones Φ1, Φ2, Φ3…son armónicas, entonces la suma ∑ i φ también lo será. Entonces los modelos de flujo simple estudiados, pueden usarse como bloques constructivos que por simple suma permiten estudiar combinaciones más complejas, estas superposiciones como veremos pueden separar las regiones de flujo en dos simulando por ejemplo, un objeto sólido embestido por una corriente 7.8.1.- patrón 6 de Flujo simple. Fuente y Sumidero de igual intensidad, conjugados. Vamos a suponer respecto del sistema coordenado, una fuente y un sumidero, separados por una distancia d sobre el eje x, con la fuente a izquierda, Fig. 7.8_1. La fuente lineal está ubicada en (-a, 0), su patrón de función corriente está dado por:
πθ
ψ2
1QF =
y el sumidero también lineal y de la misma intensidad está ubicado en (a,0)con su patrón de función de corriente dado por:
πθ
ψ2
2QS −=
El patrón de función de corriente del sistema conjugado será:
)21(2
θθπ
ψψψ −=+=Q
SF
Hagamos la siguiente transposición a la cual le aplicamos después tangente en ambos miembros, y reemplazamos los ángulos por sus valores trigonométricos.
→+
−=−=→−=
21121)21(2)21(2θθθθ
θθπψθθπψtgtgtgtg
tgQ
tgQ
→−+
−=
−++
−−
+= 2222
1
2ayx
ay
axy
axy
axy
axy
Qtg πψ
⎥⎦⎤
⎢⎣⎡
−−=→
−+−
= 22sin2
222222
arararctg
Qayx
ayarctg
Qθ
πψπψ [7.8.1]
Donde se consideró que: αα tgtg −=

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
Mod 7. Flujo Potencial Versión preliminar
16
Fig.7.8_1 7.8.2.- patrón 7 de Flujo simple. Fuente y Sumidero de igual intensidad, conjugados, mas corriente uniforme desde izquierda. Examinamos ahora el óvalo o prisma elíptico de Rankine, el cual se forma con una fuente y un sumidero, de igual intensidad, que se colocan a distancia +a y –a del origen (según se indica en la figura 7.8_2) y estas singularidades se superpone además un flujo uniforme desde izquierda. Todo el flujo de la fuente F es absorbida por el sumidero S , pero entre los tres flujos, se establece una elipse como línea divisoria cuya forma dependerá de las intensidades relativas . Los valores de la combinación se establecen por suma directa sumando los resultados individuales obtenidos en 7.7.2, 7.7.3 y 7.7.4:
ln ln 1 22 2
1 22 2
Q QV r rx
Q QV y
ϕπ π
ψ θ θπ π
= + −∞
= + −∞
Puede reemplazarse r1 = x + a, r2= x – a, quedando:
⎥⎦
⎤⎢⎣
⎡⎟⎠
⎞⎜⎝
⎛−
−⎟⎠
⎞⎜⎝
⎛+
−∞=
⎥⎦
⎤⎢⎣
⎡+−++
+∞=
axytgarc
axytgarcQ
yV
yaxyaxQ
xV
2
22)(
22)( ln
4
πψ
πφ
[7.8.2]
la elipse divisoria cerrada puede asumirse también como un límite sólido, porque línea de corriente y límite sólidos tienen iguales propiedades para los parámetros del flujo, como lo es que sobre la línea en este caso la elipse, hay velocidad tangencial distinta e cero (una característica de los flujos sin viscosidad). De esta manera la superposición de flujos permite el estudio de flujos abiertos embistiendo sólidos, obteniéndose distribuciones aproximadas de velocidades y presiones fuera de la capa límite. Por lo general a la línea divisoria que representa el obstáculo, se le asigna el valor constante de la línea de corriente ψ =0, valores positivos hacia arriba y valores negativos hacia abajo, para hacer esto a la segunda de las [7.8.2] se la iguala a cero, y se calibra el valor de l caudal de las singularidades para una corriente dada , o recíprocamente, de manera de igualar a cero la ecuación y obtener el valor adecuado. La Fig 7.8_2a , permite observar el trazado de las líneas de equicorriente para la segunda serie o solución de valores positivos y negativos, que definen las curvas dentro de la elipse entre F y S, llamados So y S1 respectivamente en el dibujo de la derecha.

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
Mod 7. Flujo Potencial Versión preliminar
17
Si bien el flujo estudiado es 2D la elipse puede ser análogamente interpretada como la sección de un prisma elíptico que va desde z = - ∞ a z = + ∞, ya que para cada plano de corte z = cte tendremos un flujo igual al representado para z = 0.
Fig.7.8_2 7.8.3.- patrón 8 de Flujo simple. Dipolo. Suponga que en el patrón 6 de flujo simple, con fuente y sumidero de igual intensidad, conjugados, la fuente y el sumidero se vayan acercando hasta que coincidan en el origen, en este caso, todo el flujo que sale de la fuente, entra al sumidero, y ambos se cancelan mutuamente, sin generar campo de flujo en el plano. Ahora suponga que a medida que se acerca uno al otro, y disminuye la distancia d = 2a entre ambos, la intensidad o caudal Q, manejada por ambas singularidades, va aumentando proporcionalmente, cuando ambos coincidan ahora el caudal emitido por la fuente y absorbido por el sumidero será infinito y el producto caudal por distancia va a tener un valor indefinido, por lo que el flujo en el plano ahora no va a ser cero, y habremos creado un nuevo tipo de singularidad, llamada dipolo, o doblete. Si partimos del análisis con los resultados del patrón 6, era:
⎥⎦⎤
⎢⎣⎡
−−= 22
sin22 ar
ararctgQ θπ
ψ
Consideremos ahora, que cuando , 0 ,02 ,0 →→→ aad , 02 →a disminuye más rápidamente, que a, por lo que podemos considerar que αα →arctg por tanto la anterior, quedará para el dipolo:
⎥⎦⎤
⎢⎣⎡
−−=⎥⎦
⎤⎢⎣⎡
−−= 22
sin22
sin22 ar
arQar
arQ θπ
θπ
ψ [7.8.3]
Ahora ∞→Q cuando 0 →a , para poder mantener la intensidad constante, para estudiar el campo, podemos considerar para cualquier punto, menos el origen: ar >> y entonces la [7.8.3] quedará:

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
Mod 7. Flujo Potencial Versión preliminar
18
⎥⎦⎤
⎢⎣⎡−=⎥⎦
⎤⎢⎣⎡−=⎥⎦
⎤⎢⎣⎡
−−=
rQ
rrQ
ararQ θ
πθ
πθ
πψ sin
2sin
22sin [7.8.4]
Se acostumbra definir como intensidad del dipolo a la cantidad:
( ) CtedQaQ === 2η Reemplazando en la [7.8.4], quedará:
rπθη
ψ2sin
−= [7.8.5]
Para hallar la función potencial, tomamos en cuenta el resultado que vincula la función corriente con la función potencial, ecauaciones.[7.7.1]:
rr ∂∂
−=∂∂ ψθφ
Derivando respecto de r la [7.8.4]:
→∂∂
=⎥⎦
⎤⎢⎣
⎡−=∂∂
−θφ
πθψ
rrQa
r 21sin
θπ
θφ
πθ
θφ
∂⎥⎦
⎤⎢⎣
⎡−=∂→⎥⎦
⎤⎢⎣
⎡−=∂∂ sinsin aQaQ
Integrando y considerando cero la constante relativa,
θπηθ
πθ
πφ cos
2cos
2cos
rrQd
rQa
=== [7.8.6]
La Fig. 7.8_3, muestra la representación del dipolo, y se observa la red ortogonal de funciones equipotencial y corriente. Fig.7.8_3

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
Mod 7. Flujo Potencial Versión preliminar
19
Con la acción superpuesta entre estos diferentes modelos, se puede obtener representaciones de flujos en torno a objetos de formas diversas, como se hizo en el caso 7 donde se superpusieron un par conjugado y una corriente uniforme, la superposición de un dipolo y una corriente uniforme nos da un caso particular del flujo en tormo a un cilindro circular, esto lo veremos en el Mod. 9. 7.9.- Potencial complejo. y Transformaciones Conformes. Para estos casos simples precedentes, Φ y Ψ se encontraron resolviendo la ecuación armónica, o por integración simple de los valores conocidos de la velocidad. En general, la mejor forma de determinar y trabajar con Φ y Ψ, es utilizando la teoría de variable compleja y las transformaciones conformes. Para ello el plano físico (x, y) en el cual habíamos representamos Φ y Ψ, como familias ortogonales, lo transformamos en un plano base complejo : z = x + i y , z es ahora, un punto de este plano complejo (no confundir con la coordenada z del espacio 3D) , si ahora definimos una función genérica del plano complejo, que llamamos potencial complejo como: F(z) = Φ(z) + i Ψ(z) F puede describirse como una función de z , donde la parte real de F es Φ(x,y) y la parte imaginaria, Ψ(x,y). Este procedimiento surge naturalmente ya que al ser Φ y Ψ, familias ortogonales, su descripción puede hacerse en el plano complejo donde la variable z está descrita por el par ordenado ortogonal (x , iy). En el espacio complejo así definido de F, las funciones Φ y Ψ forman como vimos una red ortogonal. Es posible ahora pasar del plano z = x + iy de referencia, a otro ζ = η + i ξ a través de una transformación, pero tal que conserve la naturaleza ortogonal entre Φ y Ψ, la transformación entre estos planos referenciales puede quedar definida por la función: ζ = f ( z ). Por ejemplo cuando transformamos un globo terráqueo en un mapa plano a través de una transformación Mercator, los paralelos y meridianos son ortogonales entre sí tanto en la representación esférica como plana, lo mismo que se conserva para cada punto homólogo en el mapa los valores de latitud y longitud, sin embargo las superficies de la representación plana del planeta Tierra se deforma y en particular más hacia los polos y menos hacia el ecuador. Estas apropiadas transformaciones que mantienen la naturaleza del potencial complejo original, (la ortogonalidad de la malla o red de formación) se denominan Transformaciones Conformes. Escogiendo funciones apropiadas del tipo ζ = f ( z ) podemos obtener modelos de flujo en torno a formas complicadas si se conoce el patrón de flujo F(z) para una forma simple a través de la descripción del plano ζ una vez obtenido F( ζ ). Veremos en el Mod 9 que un cilindro circular en rotación embestido por una corriente presenta un fenómeno de sustentación positiva conocido como Efecto Magnus. Veremos que al componer los vectores velocidad del campo de flujo uniforme con un dipolo y un filamento de vórtice, queda definido por la suma de patrones, un cilindro o esfera, las líneas de corriente de un campo uniforme impactando en el cilindro o esfera se modifica. En la parte inferior el campo circular se opone al campo uniforme y la velocidad disminuye, y en la superior lo magnifica y la velocidad aumenta, los caudales superior e inferior son iguales cuando no hay circulación y están separados por la línea de corriente media que presenta puntos de estancamiento adelante y atrás. Fig.7.9_1.

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
Mod 7. Flujo Potencial Versión preliminar
20
Cuando hay circulación estos puntos de estancamiento se desplazan hacia abajo, ya que la nueva zona de separación debe separar igual que antes caudales iguales arriba y abajo, el motivo es que entre líneas de corriente homólogas superior e inferior, circula un caudal constante pero las superiores ahora tienen mayor velocidad por tanto deben estar más próximas entre si. Fig.7.9_1 A diferencia de la transformación Mercator, una transformación conforme especial denominada, Transformación Joukowsky, deforma más en las posiciones próximas al origen y menos cuando nos alejamos sobre los ejes, por tanto una circunferencia se deformará en un perfil aerodinámico, pero lejos del centro, las líneas de corriente casi no se deformarán es decir se mantienen las condiciones de la corriente lejos del cuerpo o en infinito como ocurre en los modelos reales. Fig.7.9_2. La transformación conforme de Joukowsky, nos permite obtener formas complicadas con aspecto de perfiles de gota arqueados y de cola afilada que presentan sustentación, estas formas reciben el nombre de su descubridor “Nikolai Joukowsky” de utilidad en el planteo de desarrollos para diseño de perfiles de alas. En estos perfiles aerodinámicos las curvas superior e inferior que convergen en la cola afilada presentan la particularidad de tener tangentes coincidentes (o ángulo de salida de perfil de 0°), a veces esta descripción geométrica se llama “punto cuspidal”. En general estos puntos llevan implícita una discontinuidad del flujo de escurrimiento que provienen de la región superior e inferior del perfil, esto genera en presencia de un flujo real como aire, una región de vórtices de sentido (+), pero Joukowsky demostró que siempre existe una configuración de escurrimiento para la cual el aire abandona la cola sin discontinuidad, y esta condición define el valor de la circulación de signo opuesto (-) que debe tomarse para el cilindro antes de aplicar la transformación conforme. Si el valor de la circulación básica en el cilindro con efecto Magnus se ajusta a este valor específico, la discontinuidad no se manifiesta después de la transformación . Este valor de circulación óptima solamente será función de la velocidad del flujo horizontal en infinito, y en los perfiles reales la velocidad de infinito ajusta automáticamente la circulación, sorprendentemente, los perfiles no requieren rotar para crear su propia circulación, basta una combinación de flujo real (algo de viscosidad) y un punto cuspidal o aproximadamente, para que se produzca.

INTRODUCCION A LA MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
Mod 7. Flujo Potencial Versión preliminar
21
Para visualizar físicamente el efecto Magnus, a un cilindro circular o a una esfera, se los hace rotar sobre su eje y luego se hace embestir la corriente horizontal, con la rotación generamos la circulación física apoyados en la viscosidad. Fig.7.9_2 Para los perfiles aerodinámicos reales la discontinuidad inicial (o para cada cambio del ángulo de incidencia) los escurrimientos sobre la parte superior e inferior del perfil antes de lograr la igualación de los flujos, producen la estela parásita y la calle e vórtices (+) y en acuerdo con el teorema Kelvin – Helzmoltz, [6.9] aparece automáticamente una circulación inversa compensadora en torno al perfil, (ya que si la circulación neta era nula al inicio, así debe mantenerse, ahora la sumatoria de la circulación por vorticidad de estela más la circulación compensadora también deberá ser nula), así a diferencia de la sustentación por efecto Magnus en un cilindro, el perfil no necesita rotar para generar sustentación cuando se mueve en un flujo real. Un cálculo de la distribución de presiones a partir del campo de velocidades, o sea la aplicación de la ley de Bernuolli, nos indicará que hay mayor presión neta en la zona inferior que en la superior y por tanto una sustentación positiva. La profundización de estos aspectos nos llevaría de pleno al terreno de las bases de la aerodinámica teórica subsónica, cosa que nos apartaría del propósito de estas notas, pero el alumno interesado puede profundizar estos interesantes temas con la bibliografía de la referencia1.2 3 []
1 Batchellor G.K., “An introduction to Fluid Dynamics”Cambridge University Press. 2 John Olive, “Creating airfoils from circles”. University of Georgia. 3 Weisz J.P, “Curso de Aerodinámica Teórica” UNLP 1970.

INTRODUCCIÓN A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod.8 Análisis Dimensional y Semejanza con modelos (versión preliminar)
1
8 ANÁLISIS DIMENSIONAL Y SEMEJANZA CON MODELOS. 8.1.- Resolución de problemas en Mecánica de Fluidos. Ya habíamos anticipado que un problema genérico, planteado en el seno de la Mecánica de Fluidos, puede abordarse desde alguna de las siguientes ópticas: a.- Flujos internos. 1.- definir correctamente el volumen de control 2.- definir correctamente las condiciones de borde del problema. 3.- aplicar las ecuaciones integrales que correspondan. b.- Flujos externos sobre objetos. 1.- el planteo de las ecuaciones diferenciales aplicadas al problema particular con sus condiciones de borde, permitan simplificaciones que conduzcan a una resolución analítica, y que esta permita definir las propiedades del campo de flujo en todos sus puntos. 2.- que el problema no tenga resolución analítica viable, ya que no es posible resolver las ecuaciones diferenciales, pero tal vez el problema puede resolverse con herramientas numéricas, por ejemplo transformando las ecuaciones diferenciales en ecuaciones de diferencias finitas de resolución algebraica. 3.- que el problema no tenga solución dentro del marco teórico ya sea analítica o numérica, o sea muy costosa en tiempo y medios de cálculo. Este último caso es uno de los más comunes y es por eso que muchos de estos problemas hallan su solución o al menos una aproximación de la misma a través de la teoría del análisis dimensional y la semejanza con modelos. Pero antes de entrar a una descripción de este análisis debemos introducir algunos conceptos previos. 8.2 El teorema Π (Pi) de Buckingham y los grupos adimensionales:
Sabemos de física básica que los entes observables comparables presentan diferentes cantidades de la misma magnitud, estas magnitudes pueden ser escalares o vectoriales y pueden ser expresadas dimensionalmente a través de unidades en un dado sistema de referencia. Toda magnitud de la mecánica se podrá expresar en función de solamente tres unidades primarias; por ejemplo, en el sistema Técnico (Fuerza, Longitud, Tiempo) o (FLT) o al sistema MKS (Masa, Longitud, Tiempo) o (MLT), también son a veces usados los sistemas c.g.s, y sistema inglés. Por ejemplo, en el sistema (MLT), la expresión de fuerza de acuerdo a la segunda ley será dimensionalmente:
2 tiempolongitud . masa
2 ===→→
TMLaMF
la velocidad según una dirección s genérica será:
tiempolongitud
==TLV

INTRODUCCIÓN A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod.8 Análisis Dimensional y Semejanza con modelos (versión preliminar)
2
Las magnitudes siempre podrán ser referidas a las básicas MLT . Hay algunas unidades auxiliares en MKS que sirven para definir propiedades de estado termodinámico o electromagnético, que a veces se agregan a las anteriores. Por ejemplo T (temperatura), q (carga eléctrica), etc. Hay veces que se arman o aparecen en las ecuaciones grupos de magnitudes combinadas, que se simplifican y quedan reducidas a la unidad., a estos los llamamos grupos adimensionales, y algunos tienen nombres especiales como por ejemplo el número de Reynolds (Re ). Ejemplo 1: Explorar el grupo adimensional llamado N° Reynolds definido como la combinación de magnitudes:
μρ DV Re = , por ejemplo, estudiando un flujo de un fluido viscoso en torno a una esfera se trabaja con
la combinación de densidad ( ρ ); velocidad (V), diámetro de la esfera (D) y viscosidad (μ ). Para probar que la combinación de ellas definida como número de Reynolds es un adimensional ponemos, cada magnitud en función de sus unidades básicas en el sistema MKS, y observamos que ellas se cancelan mutuamente dando como resultado la unidad.
3( / ) ( / ) ( )Re 1/
M L L T LM LT
= =
En muchos problemas físicos se conocen las magnitudes o variables que intervienen es un problema paro no se conocen la relación funcional que las liga, en este tipo de problemas es específicamente útil el teorema de π de Buckingham, del que no daremos una demostración formal, sino que solamente aplicaremos. Ejemplo 2: Consideraremos que un ingeniero tiene el problema de hallar una fórmula genérica que permita calcular el arrastre o resistencia al avance F de una esfera lisa de diámetro D, que se mueve a través de un fluido viscoso e incomprensible cualquiera a velocidad V, o que, estando fija es embestid por una corriente con velocidad V . La fórmula a obtener deberá ser valida para cualquier esfera y cualquier fluido, a cualquier velocidad, siempre que esta no se supere el límite para movimiento incompresible (unos 100 m/s). Parece evidente que el arrastre será entonces una función desconocida del diámetro de la esfera, la velocidad, la densidad y la viscosidad del fluido: F = f (D , V, ρ , μ ) (la fuerza de arrastre la hemos tomado como escalar porque la estamos considerando solamente en la dirección de la corriente) La determinación de esta función desconocida en forma experimental, encierra gran dificultad, supongamos que nos abocamos a confeccionar gráficas que nos permitan ir volcando en ellas los resultados de los experimentos, como las representaciones pueden ser a lo máximo funciones del espacio (x, y ,z) podremos encarar por ejemplo, experimentos para poder representar F como función de V y D manteniendo por ahora ρ =cte , y μ =cte, esto lo hemos representado en la figura Fig.8.1_1.
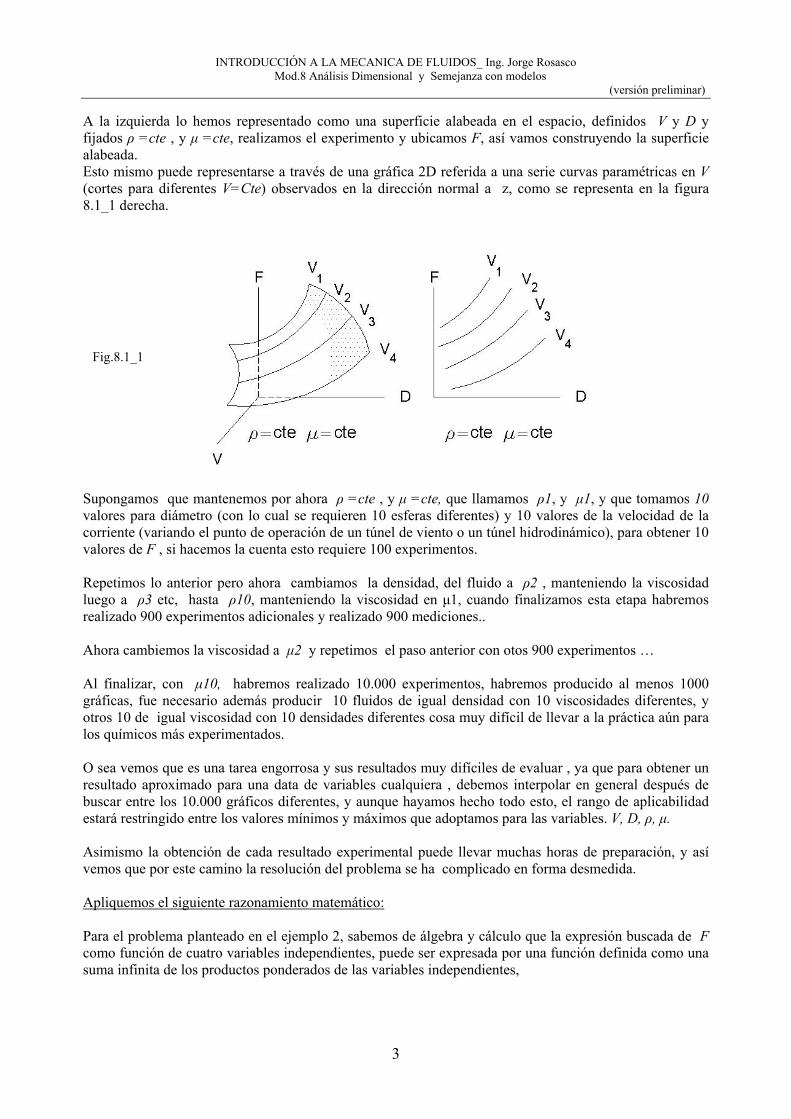
INTRODUCCIÓN A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod.8 Análisis Dimensional y Semejanza con modelos (versión preliminar)
3
A la izquierda lo hemos representado como una superficie alabeada en el espacio, definidos V y D y fijados ρ =cte , y μ =cte, realizamos el experimento y ubicamos F, así vamos construyendo la superficie alabeada. Esto mismo puede representarse a través de una gráfica 2D referida a una serie curvas paramétricas en V (cortes para diferentes V=Cte) observados en la dirección normal a z, como se representa en la figura 8.1_1 derecha.
Supongamos que mantenemos por ahora ρ =cte , y μ =cte, que llamamos ρ1, y μ1, y que tomamos 10 valores para diámetro (con lo cual se requieren 10 esferas diferentes) y 10 valores de la velocidad de la corriente (variando el punto de operación de un túnel de viento o un túnel hidrodinámico), para obtener 10 valores de F , si hacemos la cuenta esto requiere 100 experimentos. Repetimos lo anterior pero ahora cambiamos la densidad, del fluido a ρ2 , manteniendo la viscosidad luego a ρ3 etc, hasta ρ10, manteniendo la viscosidad en μ1, cuando finalizamos esta etapa habremos realizado 900 experimentos adicionales y realizado 900 mediciones.. Ahora cambiemos la viscosidad a μ2 y repetimos el paso anterior con otos 900 experimentos … Al finalizar, con μ10, habremos realizado 10.000 experimentos, habremos producido al menos 1000 gráficas, fue necesario además producir 10 fluidos de igual densidad con 10 viscosidades diferentes, y otros 10 de igual viscosidad con 10 densidades diferentes cosa muy difícil de llevar a la práctica aún para los químicos más experimentados. O sea vemos que es una tarea engorrosa y sus resultados muy difíciles de evaluar , ya que para obtener un resultado aproximado para una data de variables cualquiera , debemos interpolar en general después de buscar entre los 10.000 gráficos diferentes, y aunque hayamos hecho todo esto, el rango de aplicabilidad estará restringido entre los valores mínimos y máximos que adoptamos para las variables. V, D, ρ, μ. Asimismo la obtención de cada resultado experimental puede llevar muchas horas de preparación, y así vemos que por este camino la resolución del problema se ha complicado en forma desmedida. Apliquemos el siguiente razonamiento matemático: Para el problema planteado en el ejemplo 2, sabemos de álgebra y cálculo que la expresión buscada de F como función de cuatro variables independientes, puede ser expresada por una función definida como una suma infinita de los productos ponderados de las variables independientes,
Fig.8.1_1

INTRODUCCIÓN A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod.8 Análisis Dimensional y Semejanza con modelos (versión preliminar)
4
...33333 22222 11111 +⋅⋅⋅⋅+⋅⋅⋅⋅+⋅⋅⋅⋅= dcbVaDkdcbVaDkdcbVaDkF μρμρμρ Que podemos escribir abreviadamente como:
∑∞
=
=1
..i
diicbiVaiDkiF μρ [8.2.1]
Las ki son constantes de proporcionalidad numéricas; y a, b, c y d son exponentes enteros desconocidos.
Otra cosa que observamos es que si bien la cantidad de términos es infinita, todos tienen la misma estructura, y que como es una suma, dimensionalmente debe haber coherencia entre todos ellos, es decir, todos deben tener las mismas unidades. Establecemos entonces la igualdad algebraica de las unidades en un sistema coherente, por ejemplo (MLT), entre ambos miembros de la anterior, así nos queda para cada término:
2 3[ ] [ ] [ ]
a c dbML L M MLT T L TL
=
Comparando las unidades miembro a miembro, podemos ahora establecer las siguientes ecuaciones:
Comparo L: 1= a + b - 3c - d a=1 – b + 3c + d Comparo M: 1=c + d c=1 - d Comparo T: - 2= - b - c b=2 - d
De lo que obtuvimos, reemplazamos los valores de b y c, en a
a =1-(2-d)+3(1-d)+d = 2-d c = =1-d b = =2-d
ahora reemplazamos lo obtenido en la expresión (8.2.1), y queda:
1
(1 )(2 )(2 )i
dd dd ii iiF ki D V ρ μ∞
=
−−−= ⋅ ⋅ ⋅ ⋅∑ [8.2.2]
que podemos escribir como:
1
1
( )( ) ( )2 2
2 2
i
i
dd d dii i iF D V k D Vi
diF kiD V VD
ρ ρ μ
μρ ρ
∞
=
∞
=
⎡ ⎤−− −= ⋅ ⋅ ⋅ ⋅ →⎢ ⎥⎣ ⎦⎡ ⎤
= ⎢ ⎥⎣ ⎦
∑
∑
Como las constantes ki y di son valores numéricos, podemos decir que la expresión general de la una función entre el primer y segundo miembro será del tipo y = f (x)
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡VD
fVDF
ρμ
ρ22 [8.2.3]
Queda todo como función de d

INTRODUCCIÓN A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod.8 Análisis Dimensional y Semejanza con modelos (versión preliminar)
5
En esta expresión podemos comprobar fácilmente que los dos grupos de variables entre paréntesis son adimensionales, los llamaremos:
)( 221 ρπ
VDF
=
)(2 ρμ
πDV
=
Con lo cual [8.2.3] quedará:
⎥⎦⎤
⎢⎣⎡==
2'1)2(1 π
ππ ff [8.2.4]
Donde hemos llamado:
μρ
ππ
VD==
2
12'
Como estamos tratando con exponentes di no definidos, ambas formas de relación entre π1 y π2 son válidas. En general a todo grupo que una vez operando, dé adimensional lo llamaremos grupo (π ); en particular estos dos grupos poseen nombres específicos:
N° de Euler: 122 )( πρ
=VDF
N° de Reynolds: 2'2
1) ( ππμ
ρ==
VD
En general, podremos armar una función de las nuevas variables adimensionales:
)...3,2(1 mnf −= ππππ [8.2.5] donde n es el número de las variables iniciales del problema (independientes + dependientes) y m el número de las unidades fundamentales, en el ejemplo anterior, 5 - 3 = 2., y efectivamente tenemos en nuestro ejemplo, una función armada en total con dos variables: )2(1 ππ f= . Un caso particular puede ocurrir si el grupo 1π es único, y la ecuación [8.2.5] queda expresada como :
[1]1π = ; entonces asumimos que la función [8.2.5], es una constante y que se puede expresar 1 cteπ = , o sea la relación entre las variables adimensionales indicadas por 1π es una constante. El teorema π de Buckingham expresa que: Una ecuación que relacione n variables, que define el comportamiento de un proceso físico, puede ser expresada en función de ( n - m) grupos adimensionales π , donde n es el número total de variables que intervienen y m el número de unidades fundamentales del sistema elegido que intervienen en la definición dimensional de las magnitudes m intervinientes para

INTRODUCCIÓN A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod.8 Análisis Dimensional y Semejanza con modelos (versión preliminar)
6
representarlas, matemáticamente, siendo ( n - m - 1) los grupos adimensionales independientes y que admiten una relación funcional con los restantes.
),...,3,2(1 mnf −= ππππ O bien en forma homogénea:
0),...,3,2(1 =−− mnf ππππ Los grupos π, sin dimensiones son productos ponderados de las variables iniciales. Para el ejemplo anterior la expresión del funcional sería:
2 2
( ) ( ) E = f (R )u eF VDf
D Vρ
ρ μ= →
que tiene la forma anterior [8.2.5]. Si bien no conocemos explícitamente la función ya que no conocemos los coeficientes ki, di si, sabemos que la relación funcional es del tipo π1 = f (π’2) que es de la forma y = f(x), podemos entonces construir una sola curva en forma experimental que nos permite obtener la correlación empíricamente. Procederemos de la siguiente forma: a.- Con un dispositivo de pruebas que contenga nuestro fluido viscoso por ejemplo aire en un túnel de viento, construimos una sola esfera de diámetro D, observe que en Π’2 han quedado fijados ρ, µ y D ,ya que hemos decidido utilizar aire; así la variable independiente es V, con lo cual tenemos un amplio rango de variación para la variable independiente Π’2 manteniendo: densidad, viscosidad y diámetro constantes. b.-Para cada valor de velocidad obtenemos experimentalmente un arrastre F, y como el resto de los parámetros son conocidos (densidad, velocidad y diámetro) podemos calcular valor de Π1 entonces para cada cambio de V y construimos la curva siguiente:
Fig.8.2_1
Resulta claro que, aunque trabajando con una sola esfera de diámetro D, los valores obtenidos de la curva son absolutamente generales; basta establecer la entrada a la curva calculando el valor
μρ VD
2' =Π y salir
de la curva con ρ221 VD
F=Π .
Como D, V y ρ son conocidos para las nuevas condiciones, calculamos el nuevo F y esto utilizando la misma curva experimental siempre. Así la curva será válida para cualquier combinación de ρ, µ, V y D que den valores adimensionales dentro del rango de la grafica, ρ, µ ,en particular pueden ser diferentes

INTRODUCCIÓN A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod.8 Análisis Dimensional y Semejanza con modelos (versión preliminar)
7
para caracterizar otro fluido que no sea el aire, pero el valor de fuerza de arrastre obtenido a partir de la curva será válido para la nueva condición. Hay técnicas matemáticas simples que nos permiten, conociendo la curva experimental, hallar los parámetros de ajuste faltantes, en este caso k y D1. También se puede reescalar los ejes y parametrizar la curva para μa y ρ a; para un fluido en particular (por ejemplo aire), representando en abcisa V y en ordenada F Entonces, entrando con D, sacamos F directamente. La ventaja obvia de la utilización de los grupos π es que no se requiere trabajar con el sistema de ecuaciones diferenciales gobernantes del problema (continuidad, cantidad de movimiento, energía) sino solamente todas las variables que intervienen en el problema dado, la mecánica de la formación de grupos π permite hallar los (n-m) que están involucrados, quedando finalmente (n-m-1) grupos independientes o gráficos de correlación. Pero hay que tomar en cuenta que solamente deben intervenir las variables pertinentes, el agregado de variables no propias del problema o la omisión de alguna que si debe ser parte del problema, conducirá a resultados erróneos, y por tanto es más seguro en casos de duda trabajar a partir de las ecuaciones gobernantes, adimensionalizarlas, y entonces los grupos π involucrados aparecerán automáticamente como constantes en los términos de estas ecuaciones adimensionalizadas. 8.3 Equilibrio dinámico de fuerzas sobre la línea de corriente: Si recordamos lo estudiado en el módulo 1, decíamos que en cada instante la partícula o sistema está en equilibrio dinámico de fuerzas bajo la acción de las componentes actuantes:
Fuerzas de presión Fuerzas Viscosas Fuerzas Inerciales
Fig.8.3_1 Tomamos en cuenta lo siguiente: a.- La aceleración instantánea (aceleración tangencial + aceleración normal) producida por las fuerzas instantáneas dibujadas, determina la trayectoria en el siguiente instante. La aceleración instantánea real se observa desde la terna fija (Fig..8.5_1 izquierda), la dirección instantánea del movimiento, no

INTRODUCCIÓN A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod.8 Análisis Dimensional y Semejanza con modelos (versión preliminar)
8
necesariamente debe coincidir con el vector de aceleración resultante, ni con la dirección de cualquiera de los vectores que aparecen en la figura.. b.- La dirección de la componente inercial será observada cuando la terna de referencia se ubique sobre la partícula, para este sistema existe una pseudo aceleración (aceleración centrífuga) en el sentido opuesto respecto a la que se observa desde una terna inercial (Fig..8.3_1 derecha). La fuerza inercial en esta terna es opuesta al sentido del vector aceleración, esto está de acuerdo con considerar intuitivamente a la fuerza inercial como la resistencia de la masa a ser acelerada, el equilibrio dinámico está referido a escribir la segunda ley de acuerdo al corolario D’alembert:
0=−→→amF
c.- La fuerza neta de presión representada, será la suma vectorial de las fuerzas de presión normal y las debidas a compresibilidad si existen. d.- La fuerza neta de viscosidad representada, será la suma vectorial de las fuerzas de viscosidad y las debidas a las de tensión superficial si existen.
Cabe destacar entonces que además de las fuerzas normales →Fn y tangenciales
→Ft típicas debidas al
contacto de movimiento entre partículas también pueden aparecer un tipo adicional diferente de fuerza normal debidas a la propagación de frentes u ondas de presión en el seno del fluido, denominada fuerza de
compresibilidad →Fk , y también un tipo adicional de fuerza tangencial debida a la Tensión superficial
σ→F ,que se presentan cuando el fluido tiene una superficie libre no plana de interfaz con otro fluido por ejemplo agua o aire.
Estas fuerzas →Fk y σ
→F se manejan técnicamente a través de coeficientes, la primera denominado de
compresibilidad definido como:
⎥⎦⎤
⎢⎣⎡
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
ΔΔ
=→Δ 2
New ; lim0 m
vvpk
T
v
[8.3.1]
es decir el cambio de presión necesario a aplicar a una parcela de fluido de volumen v , para obtener un cambio de volumen relativo al volumen inicial unitario y a temperatura constante, se ve de la fórmula, que la fuerza aplicada al elemento debida a la compresibilidad se podría expresar como:
[ ] vF k A Newk vΔ⎡ ⎤= ⎢ ⎥⎣ ⎦
dimensionalmente, 2][ kLF = [8.3.2]
y en forma similar definimos el coeficiente de tensión superficial como:
, 2W New.m NewA m m
σ Δ ⎡ ⎤ ⎡ ⎤= =⎢ ⎥ ⎢ ⎥Δ ⎣ ⎦ ⎣ ⎦ [8.3.3]
o sea la cantidad de trabajo necesario para obtener un cambio unitario de área en el volumen confinado por un fluido en interfase con otro diferente. Las fuerzas de tensión superficial, se originan por la atracción debidas a polarización de las moléculas que se denomina cohesión y se manifiesta en particular para los líquidos en su interfase con un gas, típicamente aire.

INTRODUCCIÓN A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod.8 Análisis Dimensional y Semejanza con modelos (versión preliminar)
9
Por ejemplo, una gota que se sostiene en una varilla, muestra que predominan las fuerzas de atracción dentro de la gota o sea en la interfase líquida sobre aquellas que produce el aire, las partículas de agua se abroquelan tratando de formar un volumen esférico y también se genera una fuerza de adherencia sobre la varilla que sostiene la gota; otro ejemplo serían las gotitas pulverizadas de un rociador que adoptan formas esféricas. Para obtener como resultado una fuerza con el coeficiente de tensión superficial , el mismo debe ser multiplicado por una dimensión lineal, según se desprende de la ecuación [8.3.3], por ejemplo el perímetro de la semiesfera que define la gota esférica, o el perímetro de la gota esparcida en la superficie sólida, es decir:
[ ]NewLF .οο = dimensionalmente, kLF =][ [8.3.4] Volvamos ahora a la descripción del movimiento laminar de la partícula y sus compañeras adyacentes, vimos que solamente se produce cuando hay gradientes o diferencias no nulas de estas tensiones sobre caras opuestas. Las fuerzas tangenciales como ya lo estudiamos, nos introducen al concepto de “viscosidad dinámica”. Para un sólido, la deformación al corte, se cuantifica por el ángulo de deformación de una partícula aislada de forma cúbica, con un anclaje o empotramiento relativo en la base opuesta a la aplicación de la tensión, para el caso de los sólidos es entonces: τ = G.γ donde G se denomina módulo de elasticidad transversal, es el coeficiente de proporcionalidad entre la tensión de cortante y la deformación angular , según se indica en la Fig..8.3_2, para sólidos su valor es aproximadamente la mitad del módulo de elasticidad de Young EG 2/1≅ . Fig.8.3_2 Para los líquidos y gases la relación de la tensión es proporcional no ya a la deformación angular sino a su velocidad deformación angular γ ; como γ es una velocidad angular, podrá establecerse la relación γ =Vt/R siendo Vt la velocidad tangencial de la arista y R el radio de rotación en la dirección “y”, o sea
dydV
RV
== θγ
Con lo cual finalmente expresábamos la ecuación de la deformación para líquidos en función de una nueva constante de proporcionalidad que llamábamos viscosidad dinámica como:

INTRODUCCIÓN A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod.8 Análisis Dimensional y Semejanza con modelos (versión preliminar)
10
[ ]NewdydVAcorteF
dmdV )( )( μμτ =→=
Cualidades propias de la fricción viscosa: 1.- A diferencia de la fricción seca de Coulomb, la fricción viscosa es independiente de la presión, por ejemplo, dos tuberías que conduzcan el mismo fluido a igual velocidad, si uno tiene una presión interna de fluido de 10 BAR y el otro de 0.1 BAR, la resistencia a la conducción del fluido será igual en ambos casos. 2.- El fluido que queda en contacto directo con la superficie sólida (o las partículas en contacto) se solidarizan con ella y la velocidad relativa de estas partículas en las superficies es cero. A partir de este punto, las capas fluidas se van deslizando unas sobre otras, si el régimen es laminar de manera de reproducir el gradiente de una sola partícula. (Principio de no – deslizamiento). Si en el dibujo, la placa superior que se mueve a una velocidad V, tiene un área “A” , se establece un patrón de flujo bidimensional, como se indica por la distribución de velocidades en la Fig.8.3_3, la fuerza resistente al movimiento será: Fig.8.3_3.
yVA
dydVxAFR )( μμ ==
donde V representa la velocidad de la placa superior en la interfase de fluido entre dos sólidos, recuerde que este patrón es válido para espesores de capa fluida pequeñas del orden de 1 milímetro o menos. 8.4.- Semejanza con Modelos: Cuando queremos reproducir un fenómeno físico en laboratorio, buscamos una relación entre el mismo fenómeno en dos escalas diferentes, la escala real en la que el fenómeno ocurre y la escala del modelo matemático / físico. Para esto utilizamos el trabajo con grupos adimensionales lo que también como vimos, reduce el número de variables directas que intervienen en general en tres, habiendo expresando estas variables directas a través de otras llamadas grupos adimensionales o grupos π, la adimensionalidad resulta de la combinación de las unidades fundamentales en el sistema (MLT) que se cancelan mutuamente.:

INTRODUCCIÓN A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod.8 Análisis Dimensional y Semejanza con modelos (versión preliminar)
11
Masa (M). Longitud (L). Tiempo (T).
Para la existencia de una equivalencia completa en el modelo de flujo para ambas escalas, parece obvio que deberá existir semejanza geométrica entre el experimento o fenómeno a escala real y el que tratamos de reproducir y medir con los medios de laboratorio simulando las condiciones con dispositivos más pequeños. Ahora para unificar la nomenclatura definiremos prototipo al fenómeno o experimento en escala real, (subíndice p) y modelo (subíndice m) al que reproducimos con los medios de laboratorio, entonces definimos: Semejanza geométrica entre prototipo y modelo implica vincular la unidad de longitud de la siguiente forma:
333
222
λλλ ===LmLp
LmLp
LmLp [8.4.1]
Siendo Lp longitudes típicas del prototipo y Lm longitudes típicas del modelo; λ es el factor de escala entre prototipo y modelo, es decir resulta lógico pensar en modelos a escala de los prototipos respetando la escala en las tres dimensiones espaciales, si esto ocurre las áreas y los volúmenes también serán semejantes. Sin embargo para lograr la total equivalencia de los fenómenos es necesario agregar la semejanza cinemática y la dinámica. Semejanza Cinemática de flujo. Si estudiamos el prototipo bajo la acción del flujo de un fluido y el modelo bajo la acción del mismo u otro, y logramos para un flujo permanente, que en cada punto homólogo de los respectivos campos fluidos del prototipo y del modelo los vectores velocidad tengan igual dirección, sentido, y se mantengan en la misma escala para todo par de puntos homólogos, entre modelo y prototipo, entonces las líneas de corriente mantendrán el mismo patrón ya sea en torno a prototipo como al modelo. Fig.8.4_1. Podemos decir entonces que prototipo y modelo, además de ser geométricamente semejantes, son también “cinemáticamente semejantes”. Puede pensarse a primera vista que la semejanza geométrica entre objeto y modelo acarrea automáticamente la semejanza cinemática, sin embargo esto no es así. Ejemplo: En aerodinámica supersónica, los perfiles de ala poseen formas geométricas con bordes o extremos delantero y posterior aguzados como ser perfil rómbico también llamado perfil diamante. Si hacemos un modelo a escala geométrica de una de estas alas pero la probamos en un túnel de viento en régimen subsónico M < 1 , el patrón de flujo establecido será muy diferente al correspondiente al prototipo que se mueve en régimen supersónico M >1 , el patrón de líneas de corriente en este caso se establece a partir de mecanismos termodinámicos de compresión y expansión, con lo que concluimos que la semejanza geométrica es condición necesaria pero no suficiente para la semejanza cinemática. Semejanza Dinámica de flujo. Si los vectores de todas la fuerzas actuantes que están aplicadas sobre cada partícula del campo de flujo para el modelo y prototipo en puntos homólogos resultan paralelos y guardan

INTRODUCCIÓN A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod.8 Análisis Dimensional y Semejanza con modelos (versión preliminar)
12
una relación de módulos constante entre ellos, y además se aplican sobre partículas que cumplan la condición de que para cualquier par de puntos homólogos de los campos de flujo la relación de densidades
ctemp =ρρ / , ,o sea aseguramos una distribución de masas semejantes, en ambos flujos, entonces ambos flujos serán dinámicamente semejantes. También podemos establecerla, diciendo que los vectores de aceleración tengan igual dirección, sentido y escala entre puntos homólogos. Si se cumplen las tres condiciones, entonces en lo que respecta a la mecánica Newtoniana los experimentos con modelo y prototipo son “idénticos”, y las mediciones sobre el modelo, de las variables involucradas serán adecuadas para correlacionarlas con el prototipo.
Fig.8.4_1
8.4.1.- Análisis de las fuerzas intervinientes. Como ya vimos en el punto 8.4, las fuerzas concurrentes sobre las partículas para cada punto del campo que rodea a prototipo y modelo en los casos en los que pueda despreciarse la transferencia de calor, son en el caso general las siguientes y las expresamos de acuerdo a sus definiciones: Fuerzas de presión:
Normales de contacto pLFp Δ= 2
Normales debidas a compresibilidad kLFp 2= Fuerzas Viscosas:
Tangenciales de contacto VLFvAdydVFv μμ =→= )(
Tangenciales debido a tensión superficial LFp σ=
Fuerzas Másicas:
Debidas a campo gravitatorio gLFm 3ρ=
INTRODUCCIÓN A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod.8 Análisis Dimensional y Semejanza con modelos (versión preliminar)
13
Fuerzas de Inercia:
Debida a aceleración tangencial 22/
3333 VLVL
VLtVLaL
tVLFi ρρρρρ =====
Debida a aceleración centrífuga: 242][2222
3 ωρωρρρ LRLVLR
VLFi ====
El análisis estricto de semejanza obliga a que todas las partículas y en todos los puntos homólogos de ambos campos mantengan paralelismo e igual relación de módulos ente las fuerzas, esto se cumple cuando el grupo de adimensionales que interviene se hace igual para ambos flujos, esta condición es en general difícil de cumplir a medida que el número de grupos involucrados aumenta. Sin embargo, para muchos fenómenos, algunas de estas fuerzas intervinientes pueden despreciarse frente a otras en primera aproximación, dando: Criterios Simplificadores de Semejanza pero con resultados empíricos válidos para diseño. 8.5.- Obtención de los grupos adimensionales. En los problemas relacionados de la Mecánica de Fluidos, se podrán obtener un número determinado de grupos adimensionales en función de las hipótesis de simplificación observadas, pero para poder definirlos en principio a todos, tomemos la sumatoria de fuerzas actuantes sobre cada partícula, así podemos aplicar la segunda ley para cada partícula de masa δm en función de todas las posibles fuerzas actuantes sobre ellas.
→→=∑ amF .δ [8.5.1]
Que expresada en función del corolario Dálambert sería:
0. =−→→
∑ amF δ Reemplazando los valores obtenidos en [8.4.1], queda:
0]2422[322 =+−++++Δ ωρρρμσ LVLgLVLLkLpL [8.5.2] ésta es una expresión que relaciona nueve magnitudes físicas en una ecuación homogénea:
0),,,,,,,,( =Δ ωρμσ gVkplf [8.5.3] Como en todos ellos intervienen tres magnitudes fundamentales (M,L,T), se obtendrán 9 - 3 = 6 números adimensionales, la magnitud que contiene a las tres unidades fundamentales explícitamente es el término de la aceleración lineal en [8.5.2], así que podemos dividir la [8.5.2] por este término para obtener razones adimensionales, quedando:
02224
2222
223
2222222
222
=−−++++Δ
VLL
VLVL
VLgL
VLVL
VLL
VLkL
VLpL
ρωρ
ρρ
ρρ
ρμ
ρσ
ρρ
operando:

INTRODUCCIÓN A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod.8 Análisis Dimensional y Semejanza con modelos (versión preliminar)
14
212222 ⎥
⎦
⎤⎢⎣
⎡+=++++
ΔV
LV
gLVLVLV
kVp ω
ρμ
ρσ
ρρ
Como hemos dividido fuerza/fuerza, quedan definidos así grupos adimensionales, que obtienen diversos nombres propios, observe que algunos se han invertido (numerador y denominador) pero esto no afecta después porque son grupos adimensionales, y se los trabaja independientemente comparando su igualdad ente modelo y prototipo.
222 VLF
VpEu
ρρ=
Δ= Número de Euler es equivalente a [Fuerzas de presión / Fuerzas de
inercia].
cV
kVM ==ρ/
Número de Mach, [Fuerzas de inercia/ Fuerzas de compresibilidad].
c = velocidad del sonido en el medio elástico.
LVLVWeρσσ
ρ/
2== Número de Weber, [Fuerzas inercia / Fuerzas de tensión superficial].
μρ LVeR = Número de Reynolds, [Fuerzas de inercia / Fuerzas de viscosidad].
LgVFr = Número de Froude, [Fuerzas de Inercia / Fuerzas másicas].
VLSt ω
= Número de Strouhal, [Fuerzas debidas a fenómenos de
frecuencia angular] / Fuerzas de inercia ] Si hay semejanza completa entre prototipo y modelo, los flujos de los experimentos con modelos a escala más pequeña dan relaciones entre un grupo π independientes con los grupos π dependientes, es necesario entonces en el análisis previo que cinco de los seis grupos sean iguales entre modelo y prototipo. O sea esto se puede generalizar, resultando que modelo y prototipo deben mantener igualdad de tantos números π como lo indique la cantidad : ( n - m – 1 ) para cumplir con la semejanza dinámica. Normalmente se toman en cuenta cuales son las fuerzas más preponderantes presentes en el problema estudiado, y se descartan las relativamente menos importantes, dando lugar a condiciones de igualdad normalmente de dos o tres grupos, pero salvo en los casos, (n - m – 1) = 1 como el analizado en el caso de la esfera lisa, se requieren algunas hipótesis o técnicas especiales para la resolución, debido en general a imposibilidades para satisfacer la igualdad de dos o mas grupos o números adimensionales a la vez.

INTRODUCCIÓN A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod.8 Análisis Dimensional y Semejanza con modelos (versión preliminar)
15
Notas Complementarias. 8.6.- Implicancia del número de Re en el comportamiento del fluido:
Como el número Re es el cociente entre las fuerzas de Inercia y las fuerzas Viscosas, VI FF /Re = ; su valor tiene implicancia sobre el comportamiento dinámico del fluido; por ejemplo: Si Re está entre 0,1 y 10, o sea: 0,1 < Re < 10, podemos decir que IF y VF son comparables y habrá que
expresar la tríada de fuerzas como →→→
=+ FiFvFp
Si Re < 0,1 FV >> FI 0≅+→→
VFpF ; o sea que hay preponderancia de las fuerzas viscosas sobre las inerciales.
Si Re > 1000 →→
>> VI FF IFpF→→
= ; o sea que hay preponderancia de las fuerzas de inercia sobre las viscosas.
Otro dato importante a observar es que como μ
ρ VD Re = o sea una combinación de variables; un dado
Re alto ( > 1000), puede provenir de una viscosidad muy baja, pero si la viscosidad y la dimensión son muy pequeños, Re puede ser < 0,1 y el comportamiento será viscoso a pesar de tener μ pequeño. Es el caso del vuelo a gran altitud donde ρ es muy pequeño, o es el caso de los microbios o insectos de escasa dimensión que vuelan en el aire, donde el comportamiento es de naturaleza viscosa. Por eso conviene hablar de “Comportamiento” viscoso y no de fluido viscoso, y recíprocamente. 8.6.1.-. Flujos dominados por Re bajos (< 0,1) ó (ley de arrastre de Stokes) Cuando hablamos de “arrastre” nos referimos a la resistencia al avance de un cuerpo en movimiento respecto a una masa fluida que lo baña completamente, el arrastre tiene una componente de presión (o resistencia por fuerza de presión, a veces denominado resistencia de forma) y una componente de viscosidad (o resistencia debida a fuerzas de viscosidad o peliculares).
FvFpRF += Los flujos externos de Re muy bajos generan sobre los cuerpos interpuestos en ellos, una fuerza de arrastre definidas empíricamente por la ley de Stokes:
VDkRF μ= El factor k depende de la forma del cuerpo, por ejemplo, si es una esfera o un cuerpo aerodinámico que caen en glicerina tendrán coeficientes k diferente. 8.8.2.- Flujos dominados por Re altos (>1000):
La evidencia experimental, indica ahora que para estos casos la fuerza total de arrastre viene dada por:

INTRODUCCIÓN A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod.8 Análisis Dimensional y Semejanza con modelos (versión preliminar)
16
22 DVkRF ρ= Aquí hay preponderancia de las fuerzas de inercia sobre las viscosas y aparece ρ en lugar de µ. A menudo se acomoda en este caso el k para que se haga explícito el valor de la presión dinámica en la fórmula, o sea se toma una nueva constante definida como:
DCk21
= siendo CD el coeficiente de arrastre, o “drag coefficient”
Por lo tanto, queda:
AVCDVCRF DD ) 21()
21( 222 ρρ ==
La presión dinámica o presión de impacto es la registrada en el punto de impacto de la línea corriente (centrada sobre el eje x) sobre la proa del objeto, si se aplica la Ecuación de Bernuolli sobre esta línea entre un punto lejano y el punto de impacto, se obtiene la presión de impacto (manométrica) en este punto: 1 2( )
2Vρ
Como 2D representa dimensionalmente a un área genérica, tomamos como referencia el área de la sección que el cuerpo interpone a la corriente fluida, por ejemplo, según se ve en el dibujo siguiente, si el cuerpo interpuesto es una esfera (aunque podría ser cualquier otro) , el área interpuesta a la corriente de
velocidad V será la sección circular frontal máxima , en este caso A = )4
2 ( Dπ .
Fig. .8.6_1 La línea de corriente central, tiene corriente arriba, una velocidad V, y V = 0 en el punto de impacto, aplicando la ecuación de Bernuolli entre este punto y uno cualquiera lejano de la misma línea de corriente, obtendremos el valor de la presión de impacto. De la fórmula vemos que en este caso, el arrastre se cuadriplica si la velocidad o el tamaño de la sección se duplica. También, como: Potencia = Fuerza × Velocidad resulta:
21( )2DP W C V AVρ
•
= = o sea: 3VP ≅
o sea la potencia requerida para el movimiento es proporcional al cubo de la velocidad Ejemplo 1: Si comparamos 2 peces, uno pequeño y uno grande, y observamos el valor de la potencia por unidad de peso que debe invertir cada uno para el movimiento :
INTRODUCCIÓN A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod.8 Análisis Dimensional y Semejanza con modelos (versión preliminar)
17
3 23
33
1 1 22 ( ) ( ) 2
D
DD
C V DP V Dg PC VG D g Dg C G
ρ
ρ= = → =
Si asumimos que ambos deben moverse a la misma velocidad V , para el pez con D mas chico PG
debe
ser mas grande. Por tanto, para lograr la misma velocidad, un pez pequeño debe emplear mayor potencia por unidad de peso (o relación peso / potencia), que un pez grande. Por eso, cuanto más pequeño es el ente acuático, menor es la velocidad observada. 8.6.3.- Ley de equivalencia de los Coeficientes de Arrastre: Como vimos al estudiar el arrastre de la esfera lisa de acuerdo a las leyes de análisis dimensional, concluimos que dos experimentos con cuerpos en movimiento, íntegramente inmersos a un flujo, que cumplan con semejanza geométrica, cinemática y dinámica, y que tengan igual número Re; tendrán igual valor para el número Π 1 en el diagrama funcional que relaciona Eu = f (Re) y por tanto se cumplirá para ambos cuerpos que los Nº de Euler serán también iguales:
cteDV
FDV
F==
12
12
1
1
22
22
2
2
ρρ para ambos
Aplicando la definición de número de Euler, por ejemplo al caso de una esfera lisa, despejando la fuerza, y luego multiplicando y dividiendo por iguales constantes::
22 4 1 12 22 2 2[Re] [Re] [Re]2 4 2 2
DF V D f V f f V A C V Adπρ ρ ρ ρ
π⎡ ⎤= = = =⎢ ⎥⎣ ⎦
[8.6.1]
en la cual A representa el área frontal de la sección mayor de la esfera “lo que ve el flujo” y Cd agrupa:
8 [Re] [Re]1Cd f fπ
= =
de la ecuación anterior, [8.6.1], deducimos que el Cd o coeficiente de arrastre, es una constante para cada estado particular del flujo, y dependerá del número de Reynolds para esa condición particular. También nos permite deducir algo importante, como para modelo y prototipo, los números de Euler deben ser iguales:
→=PDV
F
MDVF
2222 ρρ
Reemplazando con la [8.6.1], queda:
DPDMDD CCP
CM
C =→=21
21 [8.6.2]
o sea llegamos a la ley de equivalencia siguiente: Para experimentos con objetos totalmente sumergidos en una corriente, en que la semejanza geométrica, cinemática y dinámica, se cumplan, igualdad en el número Re, o Eu lleva a la igualdad del coeficiente de arrastre para modelo y prototipo. Esto justifica que para cada familia de objetos símiles en forma haya un coeficiente único que puede tabularse para cada forma.

INTRODUCCIÓN A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod.8 Análisis Dimensional y Semejanza con modelos (versión preliminar)
18
8.7.- Abordaje de Problemas donde sea necesario aplicar Semejanza con Modelos. El problema puede presentar diferentes condiciones de contorno, que definiremos a continuación. 8.7.1.- Modelo y prototipo sumergidos totalmente en una corriente. Es el caso por ejemplo de estudios para desarrollo de prototipos cuyo desempeño sea totalmente inmersos con un solo tipo de fluido en movimiento, por ejemplo podemos citar, 1.- automóviles, 2.- aeronaves, 3.- submarinos, 4.- edificios. 5.- tuberías o ductos sin superficie de fluido libre en su interior. En general, para estos modelos la resistencia F = f (L,V ρ ,μ ) , tiene una dependencia con cuatro variables independientes, por ejemplo objetos en movimiento totalmente inmersos en la masa de aire o agua, y en flujo subsónico, será necesario la igualdad de dos grupos adimensionales, EuP = EuM y ReP= ReM, . Esto nos indica que el proceso de experimentación debería tener los siguientes pasos: a- Construir un modelo a escala geométrica del objeto, definiendo el valor de escala λ. b.-Obtener a partir la igualdad de números de Reynolds entre modelo y prototipo, y conociendo la velocidad que requerimos para el prototipo obtener la velocidad requerida para el ensayo con el modelo.
p
LpVppm
LmVmmμ
ρμ
ρ= [8.7.1]
c- Obtener en el túnel aerodinámico o hidrodinámico el valor de la resistencia o fuerza de arrastre sobre el Modelo, ensayando con la velocidad y el tipo de fluido que defina la igualdad anterior. d- A partir de la fuerza en el modelo, obtener a partir de la igualdad de los números de Euler, la fuerza o resistencia al avance que tendrá el prototipo.
2222 LpVpp
FpLmVmm
Fmρρ
= [8.7.2]
Vm corresponde a la velocidad del modelo y 2Lm al área frontal del modelo que se opone a la corriente, las mismas variables con el subíndice p indican los valores para el prototipo, también se debe tener en cuenta que Lp / Lm = λ y que Lp 2 / Lm 2= λ 2 . Esto nos permitirá de antemano conocer la fuerza de arrastre esperada, antes de construir el prototipo, y hacer cambios sobre el modelo si fuera necesario, y nuevas pruebas de ajuste.

INTRODUCCIÓN A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod.8 Análisis Dimensional y Semejanza con modelos (versión preliminar)
19
Un dato importante a tener en cuenta es que en el paso 1, el modelo a construir debe proyectarse para soportar el tipo de esfuerzos a los que será sometido con deformaciones proporcionales a las que tendrá finalmente el prototipo bajo las cargas reales, y no mayores o menores a esta estimación, para que los resultados obtenidos en los ensayos de túnel sean significativos. Esto es una especie de garantía estructural que debemos asegurar para el modelo. Por ejemplo si ensayamos en un túnel de viento el comportamiento de un puente, las deformaciones estáticas propias que tendrá el puente real, cuando circule tránsito deberán estar representadas proporcionalmente en el modelo. A veces a esta condición adicional de semejanza entre modelo y prototipo se la llama “semejanza estática o mecánica” y se añade a las otras tres.
La utilización del par de ecuaciones 8.7.1 y 8.7.2 pueden presentar algunos inconvenientes cuando se utiliza el mismo fluido para el modelo respecto del prototipo, como vemos en el ejemplo siguiente.
Ejemplo 2:. Se desea utilizar un modelo de madera en escala 1:10 para medir la resistencia total al avance que tendrá el prototipo proyectado de un automóvil, a una velocidad típica de 120 km/h, el largo estimado que tendrá el prototipo es de 3.75 metros, se desea utilizar con el modelo un túnel de viento. ¿Cual será la velocidad a utilizar en el túnel de viento, y cual la resistencia estimada que tendrá el prototipo proyectado a 120 Km/h ? Resolución. 1.- la relación λ = Lp / Lm =10 2.- Igualamos los números de Reynolds:
pDpVpp
mDmVmm
μρ
μρ
=
Como los fluidos de ensayo de modelo y prototipo es el mismo, la anterior queda:
]/[3.333]/[120010]./[120... segmhKmhKmVpDmDpVpVmDpVpDmVm =====→= λ
Esta velocidad de ensayo es impracticable, debido a que es extremadamente alta y excede el límite para el cual podemos considerar al aire como un fluido incompresible (0.3 M), que es de unos 100 [m/seg], en este caso el valor típico de número de Mach es:
01.1]/[330]/[3.333===
segmsegm
cVM >> 0.3
Es decir estaremos en rango supersónico y mucho más allá del límite de incompresibilidad de 0.3 M A primera vista no podría ser utilizado un túnel de viento para esta experiencia, sin embargo podemos hacer algo ingenioso. En primera aproximación podemos considerar el automóvil como un segmento de cilindro corto perfilado (y obtenemos de los datos publicados, la curva para rango total de ensayo para este tipo de objeto, colocado apoyado sobre un plano horizontal en el túnel.
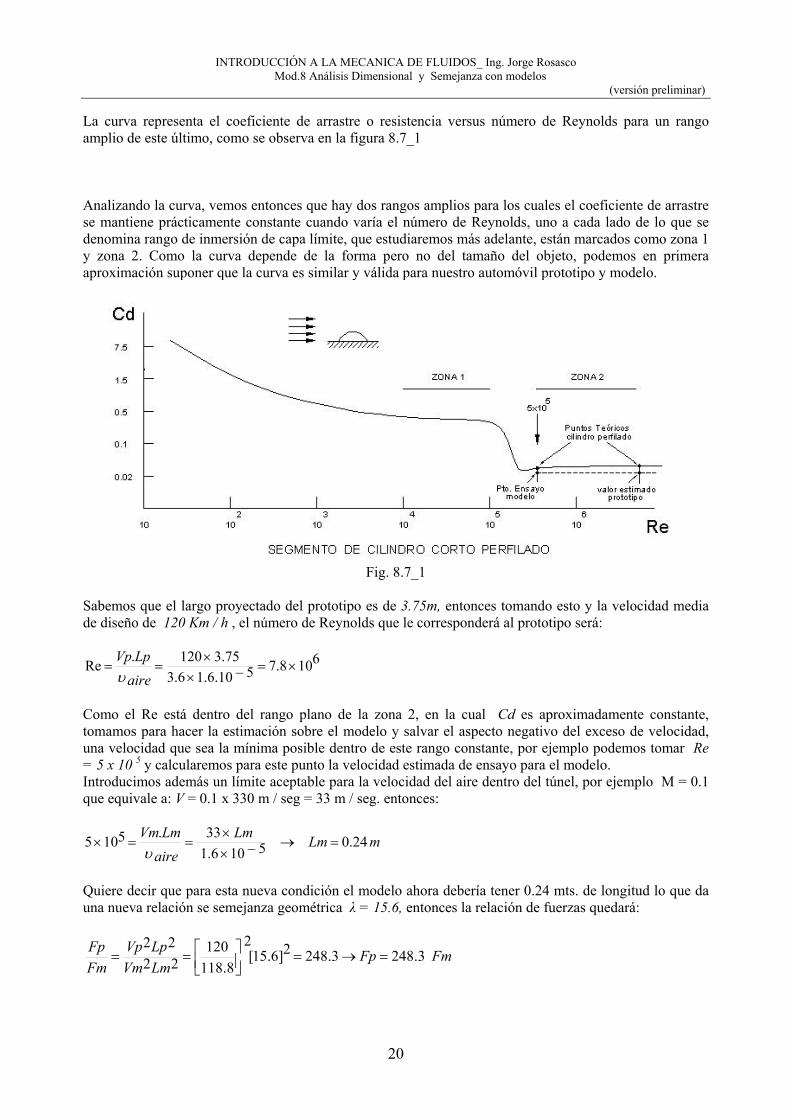
INTRODUCCIÓN A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod.8 Análisis Dimensional y Semejanza con modelos (versión preliminar)
20
La curva representa el coeficiente de arrastre o resistencia versus número de Reynolds para un rango amplio de este último, como se observa en la figura 8.7_1 Analizando la curva, vemos entonces que hay dos rangos amplios para los cuales el coeficiente de arrastre se mantiene prácticamente constante cuando varía el número de Reynolds, uno a cada lado de lo que se denomina rango de inmersión de capa límite, que estudiaremos más adelante, están marcados como zona 1 y zona 2. Como la curva depende de la forma pero no del tamaño del objeto, podemos en primera aproximación suponer que la curva es similar y válida para nuestro automóvil prototipo y modelo.
Fig. 8.7_1
Sabemos que el largo proyectado del prototipo es de 3.75m, entonces tomando esto y la velocidad media de diseño de 120 Km / h , el número de Reynolds que le corresponderá al prototipo será:
6108.7510.6.16.375.3120.Re ×=−×
×==
aireLpVp
υ
Como el Re está dentro del rango plano de la zona 2, en la cual Cd es aproximadamente constante, tomamos para hacer la estimación sobre el modelo y salvar el aspecto negativo del exceso de velocidad, una velocidad que sea la mínima posible dentro de este rango constante, por ejemplo podemos tomar Re = 5 x 10 5 y calcularemos para este punto la velocidad estimada de ensayo para el modelo. Introducimos además un límite aceptable para la velocidad del aire dentro del túnel, por ejemplo M = 0.1 que equivale a: V = 0.1 x 330 m / seg = 33 m / seg. entonces:
mLmLmaire
LmVm 24.0 5106.133.5105 =→−×
×==×
υ
Quiere decir que para esta nueva condición el modelo ahora debería tener 0.24 mts. de longitud lo que da una nueva relación se semejanza geométrica λ = 15.6, entonces la relación de fuerzas quedará:
FmFpLmVmLpVp
FmFp 3.2483.2482]6.15[
2
8.118120
2222
=→=⎥⎦⎤
⎢⎣⎡==

INTRODUCCIÓN A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod.8 Análisis Dimensional y Semejanza con modelos (versión preliminar)
21
Una vez obtenida la fuerza que se registra para el modelo podemos calcular la fuerza estimada para el prototipo. Con esta fuerza para el modelo, podríamos determinar exactamente donde está el punto que nos dá el valor de Cd para el modelo, y que es igual para el prototipo, trazando una curva paralela (línea de trazos en el diagrama). Observemos que ahora la velocidad del túnel es aceptable, los túneles de baja velocidad están en el rango, 0 a 20 m / seg, es decir estamos un poco por arriba de esto, también hemos disminuido el tamaño del modelo de la razón λ = 10 a λ = 15.6. y también que ambos Cd prototipo y modelo son iguales en función del resultado [8.6.2] lo que no significa que las resistencias sean iguales. 8.7.2.- Modelo y prototipo sumergidos parcialmente en una corriente. (Flujos con superficie libre). Son casos en los cuales el prototipo presentará en su operación una superficie de interfase entre dos fluidos, típicamente aire y agua y su funcionamiento esté pensado para funcionar en uno de ellos, típicamente agua, por ejemplo podemos citar: a.- Presas. b.- Vertederos. c.- Aliviaderos en presas. d.- Transiciones en canales. e.- Objetos flotantes con y sin oleaje (embarcaciones). f.- Pilares semi-sumergidos de sostén de puentes. g.- Objetos sumergidos con cavitación, (palas de bombas y turbinas). En estos problemas aparece una superficie de interfaz que no teníamos antes, deberemos tener en cuenta los siguientes aspectos:
La presión en ambos lados de la interfaz (un diferencial por arriba y por debajo) es igual. La gravedad controla la ubicación y determina la velocidad del movimiento de la superficie de
interfaz, al intervenir las fuerzas gravitatorias, aparece entonces una dependencia funcional con el número de Froude aparte del ya presente para una sola fase, es decir tendremos dos funcionales:
Euler = f(Reynolds), Euler= f(Foude). Si bien el modelo y prototipo están sumergidos en dos flujos diferentes, el tipo de problemas a
abordar nos indica que los valores de fuerza serán significativos para la fase líquida, y podemos despreciar las fuerzas originadas por la fase gaseosa.
En los modelos a construir el agua es el único fluido económico para utilizar. Se considera que los flujos no poseen movimientos periódicos, efectos de compresibilidad ni
tensión superficial, por lo que se descarta la influencia de los grupos St, M y We. Utilización de los grupos Reynolds y Froude simultáneamente. La utilización simultánea de ambos si queremos utilizar agua como medio fluido común nos dará, igualando Froude:
λVmVpgpLp
VpgmLm
Vm=→=
.
2
.
2
Al aplicar Reynolds, como densidad y viscosidad, y por tanto viscosidad cinemática son iguales para modelo y prototipo:

INTRODUCCIÓN A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod.8 Análisis Dimensional y Semejanza con modelos (versión preliminar)
22
λυυ1.. VmVp
p
LpVp
m
LmVm=→=
O sea que el agua nos conduce a valores diferentes, por tanto el fluido compatible para ambos grupos sería a partir de la segunda ecuación:
2/3
2/3111..
−=
→===→=
λυυλλλυ
υυυ
pm
VpLpVmLm
pm
p
LpVp
m
LmVm
O sea debemos desarrollar para la prueba del modelo un fluido con esta viscosidad cinemática, que será además una relación dependiente de los tamaños del prototipo y del modelo elegidos, cosa que puede ser complicado de hacer, siendo los más fácil la utilización de agua para ambos. Po lo tanto lo que se hace es establecer una primera aproximación considerando que para objetos de transiciones cortas, las fuerzas debidas a viscosidad son menos importantes que las debidas a cambio de nivel de la línea de interfase, .es decir consideramos Fvm = Fvp ~ 0 y agua como fluido común a ambos, o sea se trabaja solamente con la igualad: Euler = f (Froude), y no se tiene en cuenta el funcional : Euler = f (Reynolds), esto es bastante aproximado para objetos con transiciones cortas, para los objetos con transiciones largas como embarcaciones se requiere un trabajo de aproximación adicional. 5.2.1.- Objetos semi-sumergidos con transiciones cortas (casos a, b, c, f y g). Se construye una maqueta con relación de semejanza λ por ejemplo de un lago con un embalse, inundando con agua las zonas que correspondan, las profundidades. Las condiciones de contorno superficial del fondo etc, todas deben mantener la semejanza con la adecuada relación de escala elegida. Datos importantes a calcular para el prototipo en función de los datos medidos para la maqueta modelo: a.- tiempo de pasaje medido de una partícula a través de una transición (aliviadero, vertedero), en relación con la base de tiempos del prototipo:
λλλ
mtptVmVp
LpLm
tptm
VpLp
pt
VmLm
mt=→==→
=
=
λmtpt =
b.- caudales que atraviesan por las transiciones.

INTRODUCCIÓN A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod.8 Análisis Dimensional y Semejanza con modelos (versión preliminar)
23
2/5
21
22
.. −===→
==
λλλλVmLp
VmLmQpQm
ApVpQpAmVmQm
2/5−= λQmQp c.- Fuerza sobre compuertas,. A partir del segundo funcional también habrá igualdad de números de Euler:
322
222
22
22λλλ
ρ
ρFm
VmVmFm
VmLmVpLpFmFp
LpVpFpEup
LmVmFmEum
===→=
=
3λFmFp =
5.2.2.- Objetos con transiciones largas, caso e, , objetos flotantes en movimiento, con y sin oleaje. El arrastre o resistencia al avance en una embarcación está dado por tres componentes:
Arrastre o resistencia de forma o presión de la interfase líquida (agua), despreciando el arrastre producido por la interfase gaseosa (aire).
Resistencia de fricción viscosa o pelicular producido por la fase líquida. Arrastre o resistencia de forma o presión con oleaje.
Esto nos indica que el proceso de experimentación debería tener en este caso los siguientes pasos: 1- Construir un modelo a escala geométrica del objeto proyectado, definiendo el valor de escala λ. 2.-Obtener a partir la igualdad de números de Froude en este caso entre modelo y prototipo, y conociendo la velocidad que requerimos para el prototipo, obtener la velocidad requerida para el ensayo con el modelo, considerando que los fluidos del modelo y el prototipo son agua.
λ
VpVmpgpL
Vp
mgmLVm
=→=22
3.- Medir el arrastre total en el túnel hidrodinámico Fdm. Fig 8.7_2 (a), remolcando el modelo a la velocidad obtenida en el punto 2. 4.- Medir en el túnel el rozamiento pelicular o viscoso Fvm .moviendo una placa plana cuya superficie sumergida sumada de ambos lados sea equivalente a la superficie sumergida de la embarcación (superficie de carena) y su largo o eslora sea igual al del modelo Lm. .( Fig. 8.7_2b) y sea igual su rugosidad.

INTRODUCCIÓN A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod.8 Análisis Dimensional y Semejanza con modelos (versión preliminar)
24
Fig. 8.7_2
5.- Restar este valor obtenido en el paso 4, del arrastre total obtenido en el paso 3, de esta forma obtenemos la resistencia neta de forma o presión para el modelo Fdm - Fvm = Fpm . 6.- Ahora, aplicando los resultados del estudio de capa límite para placas planas 1,. calcular teóricamente el valor Fvm (estamos dando intervención al análisis de fuerzas viscosas y al Nº de Re) y compararlo con el obtenido en el paso 4, hacer los ajustes de los coeficientes en las ecuaciones teóricas para que se ajusten con los resultados del experimento. 7.- Se calcula ahora la resistencia de forma o presión del prototipo aplicando la igualdad de los números de Euler a partir de la relación de semejanza geométrica y del valor obtenido en el paso 5 y de la relación de velocidades obtenida en 2.
→===→=
= 32.2
222
22
22λλλ
ρ
ρLmLp
VmVp
FpmFpp
pLpVppFp
Eup
LmmVmmFp
Eum
3λpmFppF =
8.- Se hace ahora un análisis teórico con las ecuaciones ajustadas de la placa lana equivalente al prototipo, y se obtiene el valor Fvp. 9.- Finalmente calculamos el arrastre total estimado para el prototipo.
FvpFppFdp +=
1 Veremos el análisis de capa límite para placa plana en el Mod 9.
El resorte se deforma más
El resorte se deforma menos

INTRODUCCIÓN A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod.8 Análisis Dimensional y Semejanza con modelos (versión preliminar)
25
Fig. 8.7_3 Esquema del túnel hidrodinámico y sus componentes2 10.- Resistencias con oleaje. Para este fin primero es necesario hacer un modelo para el túnel hidrodinámico del oleaje , hay que tomar en cuenta el período, altura o amplitud y frecuencia de la ola real típica con las relaciones :
λλ Lplm
LmLp
=→=
La frecuencia del oleaje debe ser modelada con los periodos, afectados por la nueva base de tiempo dada por:
λλ tptm
tmtp
=→=
El oleaje se simula batiendo hacia delante y atrás una placa del ancho del canal hidrodinámico de manera de reproducir los datos obtenidos para el modelo de oleaje. Se repite el paso 3 con el oleaje simulado y se obtiene el nuevo valor de Fdm , que incluirá la resistencia al oleaje., ahora será para el modelo: Fdm = Fpm + Fvm + Fom igual que antes se calcula: Fdm – Fvm - Fpm = Fom Y aplicando la igualdad de Nº s Eu, calculamos la resistencia de oleaje para prototipo.
3F Fop om λ=
2 Las figuras 7_2 y 7_3 fueron tomadas del libro “Elementos de arquitectura naval” de Antonio Mandelli.

INTRODUCCIÓN A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod.8 Análisis Dimensional y Semejanza con modelos (versión preliminar)
26
Obteniendo el valor total de resistencia con oleaje: Fdp = Fpp + Fvp + Fop En este problema se siguió primero la idea de asegurar la igualdad de tres grupos, Reynolds, Euler y Froude, y cumplir tres igualdades dos a dos, lo que en realidad implica la utilización de dos funciones. Vimos que esto es básicamente difícil de cumplir, porque el fluido requerido en común ya no puede ser agua, salvo que las dimensiones de objeto y prototipo se vayan aproximando, y se requirió aplicar una técnica especiales indirectas para el ensayo, eliminando en primera aproximación la función: Euler = f (Reynolds) pero incorporando las fuerzas viscosas presentes por ensayo y correlación con las ecuaciones de capa límite. Se observa, que seguir agregando complejidad y variables al problema de la semejanza o sea considerar más fuerzas, implica que se van agregando más grupos adimensionales esto, la solución indirectamente requiere de la igualación entre modelo y prototipo en tamaño, y masas involucradas y la condición va convergiendo solamente para fluidos iguales y tamaños iguales entre modelo y prototipo. Pero al aproximar los tamaños de objeto y prototipo, la semejanza estática comienza a imponer restricciones estructurales, o sea nos está diciendo en idioma matemático: “pruebe con el objeto real mismo” cosa que nos devuelve al inicio del problema planteado. En resumen el análisis experimental siempre requiere de algunas simplificaciones. 5.3.- Modelo y prototipo sumergidos totalmente en una corriente de alta velocidad (flujo compresible). Los modelos de similitud con flujos compresibles, adquieren importancia cuando el flujo de la corriente en el prototipo es superior a M = 0.3 lo que obligará a que el flujo sobre el modelo también sea compresible para mantener la semejanza geométrica entre ambos patrones de flujo. Del módulo 1 recordamos que el número de Mach M, de una corriente, depende de la velocidad de flujo y de la velocidad local del sonido, así M = V / c donde:
oTT
occ = siendo co = 330 m/seg y To = 273 + 15 = 288 ºK,
son los valores típicos de la velocidad del sonido y la temperatura absoluta respectivamente para la atmósfera estándar a nivel del mar. En estos casos entonces, donde los efectos de la compresibilidad son más importantes que los viscosos, se utiliza como parámetro el grupo M en lugar del Re , los problemas de flujo compresible se presentan siempre en una sola fase es decir el objeto totalmente inmerso en flujo compresible (aeronave de alto desempeño) o flujo confinado compresible (toberas) , se involucra entonces un solo grupo funcional que vincula Euler y Mach, Eu = f (M).lo que implica la igualdad por separado de:
pEumEupMmM
==

INTRODUCCIÓN A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod.8 Análisis Dimensional y Semejanza con modelos (versión preliminar)
27
De la primera // /
Vm Vp Vm Vp Tm Tpc Tm T c T To p oo o
= → =
Tm es la temperatura absoluta para el ensayo de túnel. Tp es la temperatura absoluta a la cual operará el prototipo, típicamente la temperatura a la altura de operación de una aeronave o perfil alar. Las fuerzas en juego, se manejan con la segunda ecuación de igualdad en Euler,
2222 LppVpFp
LmVmm
Fmρρ =
Y para presiones con:
22 Vpppp
Vmmmp
ρρΔ
=Δ
Observe que a pesar de ser el aire el fluido común para modelo y prototipo, ahora las densidades no se pueden simplificar ya que estamos considerando el flujo como compresible, y serán en general diferentes para ambos debido a las diferentes temperaturas de operación.. Los túneles de ensayo para flujos compresibles son muy costosos, y trabajan por descarga súbita de un depósito con aire a alta presión que se libera al ambiente, de forma que los intervalos en los que se puede considerar el sistema con flujo permanente son muy cortos , y por tanto las mediciones sobre los modelos complicadas, debiéndose usar métodos electrónicos y ópticos, captura digital de los datos etc.
Fig.5..3_1
La figura 5.3_1 muestra en forma esquemática uno de estos dispositivos para ensayo de modelos de perfiles, aeronaves u objetos en corrientes supersónicas.3
3 Esquema cortesía de NASA Langley.

INTRODUCCIÓN A LA MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod.8 Análisis Dimensional y Semejanza con modelos (versión preliminar)
28
5.4.- Modelo y prototipo inmersos en flujos periódicos. Son flujos que se asocian a fenómenos periódicos como la generación de vórtices de patrón fijo, en objetos de sección cilíndrica, elíptica o perfilada, y también en movimiento de máquinas rotativas , molinos eólicos o turbo maquinaria. Estos fenómenos periódicos donde se manifiesta la vorticidad dependen naturalmente de la viscosidad del fluido por lo cual los grupos Euler, Reynolds y Strouhal están vinculados a través de dos funcionales. Eu = f (Re) y Eu = f (St ). En caso de cavitación aparece además un flujo de dos fases por lo cual la dependencia es más compleja agregándose el grupo Froude. y son entonces tres funcionales. Se comienza por la igualdad de los números de Reynolds que permite vincular la velocidad del flujo para modelo y prototipo en función de las longitudes si se usa aire para ambos.
λυυ
=→=VpVm
pVpLp
mVmLm
Por ejemplo si es un modelo para un molino eólico, se puede conocer la velocidad media de flujo esperada para el prototipo y calcular la velocidad de flujo para el modelo en función de la relación de escala que debe determinarse de acuerdo al túnel disponible. Si se miden las revoluciones a la que gira el modelo para un perfil de hélice dado , a partir del número de Stouhal:
λωω
ωω1
VmVp
mpLpp
VpLmm
Vm=→=
Con esto se estiman las revoluciones del prototipo. Aplicando igualdad de números de Euler, se puede vincular la potencia en juego
λλλλρ
ρ ••
•
•
=→=⎥⎦⎤
⎢⎣⎡==== WmWp
LmVmLpVp
LmVmm
LpVpp
Wm
WpFmVmFpVp 2
312323
2222
Midiendo la potencia desarrollada por el la hélice propulsora del modelo en el túnel, tendremos una aproximación de la potencia que puede entregar el molino una vez construido. []
FUNDAMENTOS DE MECANICA DE FLUIDOS _ Ing Jorge Rosasco
Mod 9 Capa límite (versión preliminar)
1
9 CAPA LÍMITE. 9.1 Definición de la capa límite.
En 1904, el Dr. Ludwig Prandtl desarrolló y presentó poco después en las célebres conferencias de Gottingen el concepto de capa límite, el que permite la descripción principalmente de flujos abiertos sobre objetos, como separados en dos zonas diferenciadas, por una parte, una región próxima al objeto, denominada capa límite, donde se produce un tipo de flujo dominado por la viscosidad, aún en los casos de fluidos de baja viscosidad como el aire, y otra zona exterior a ella sin predominio de la viscosidad, con características próximas a un flujo ideal irrotacional o flujo potencial. Es decir la teoría permite hacer un enlace aproximado vinculando la teoría de flujos potenciales y los flujos reales de baja viscosidad. Se aplican los resultados de la teoría de flujos potenciales fuera de la zona del denominado espesor de desplazamiento, y se incorporan los resultados que permiten calcular los efectos de rozamiento pelicular, y la predicción de las zonas de separación de capa límite para las zonas interiores muy próximas al cuerpo, dando resultados globales próximos al comportamiento real de flujos en torno a objetos, y de flujos internos y confinados. Para flujos con viscosidad pequeña, el efecto del rozamiento interno es apreciable sólo en una pequeña región próxima a los límites entre el fluido y el objeto, llamada “capa límite”. El comportamiento del fluido dentro de la capa límite se deduce para algunos casos simples, en forma exacta a partir de las ecuaciones generales de Navier Stokes y, por encima del espesor de desplazamiento, el flujo puede considerarse ideal. (estos desarrollos exactos dan lugar a las Soluciones de Blasius). A través de la ecuación de cantidad de movimiento lineal, siguiendo los lineamientos Von Karman, se puede encontrar valores aproximados de espesor de capa límite y hacer una estimación del espesor de desplazamiento, así como determinar las resistencias de fricción en objetos como placas planas o cuerpos con superficies de pequeña curvatura: χ =(1/R). 9.2.- Un pequeño intermedio, el Efecto Magnus y la Paradoja de Dálambert. Ya dijimos en el Mod 7. que el principio de superposición para flujos potenciales simples es válido por la condición de Laplace y el corolario del mismo que nos indica que si dos o más funciones Φ1, Φ2, Φi…son armónicas, entonces la suma ∑ i φ también lo será. A partir de la composición de algunos de estos flujos simples, podemos armar como veremos el modelo de un cilindro embestido por una corriente con y sin circulación. Recordemos que los flujos potenciales en este caso son usados en 2D, es decir las propiedades desarrolladas para el plano, se repiten idénticamente para todo plano z, por lo cual tanto el cilindro como la corriente se consideran infinitos en la dirección z, y el modelo de flujo obtenido para el plano z = 0 se repite idénticamente para todo paralelo a el y las conclusiones importantes, las obtendremos referidas o por unidad de longitud transversal. En este caso vamos a superponer los siguientes flujos simples: a.- Corriente uniforme expresada en Coordenadas polares.
θφ cos.. rVxVcu ∞=∞= [9.2.1]

FUNDAMENTOS DE MECANICA DE FLUIDOS _ Ing Jorge Rosasco
Mod 9 Capa límite (versión preliminar)
2
b.- Vórtice potencial en polares,
πθφ
2Γ
=v [9.2.2]
Donde, Γ es la circulación constante en torno a cualquier circunferencia que rodea al vórtice y que define la intensidad del mismo. c.- Dipolo con fuente a izquierda, de intensidad η .
rd πθηφ
2cos
= formados por una fuente y un sumidero: ln2s ; ln
2r
Qr
Qf π
φπ
φ −== [9.2.3]
Recordemos que el dipolo, esta formado por una fuente, en este caso a la izquierda sobre el eje x y un sumidero a la derecha, pero a diferencia del doblete, ambos se encuentran en el origen, es decir con una distancia que los separa d → 0. La intensidad η del dipolo está definida como η = Q.d , con Q → ∞ y d → 0 es decir un producto indeterminado pero con límite finito a definir. Entonces la superposición de los tres flujos simples citados dará una nueva función potencial Φ y una nueva función corriente Ψ, definidas por la suma de ellos
rrV
πθη
πθθφ
2cos
2cos. +
Γ+∞= [9.2.4]
rrrV
πθη
πθψ
2sinln
2sin +
Γ+∞= [9.2.5]
Recordemos que en las ecuaciones expuestas, R y θ, son las componentes de cualquier punto genérico del plano o campo 2D, definido en coordenadas cilíndricas a partir del origen, en los cuales queremos investigar las propiedades de velocidad y presión. Fig.9.2_1

FUNDAMENTOS DE MECANICA DE FLUIDOS _ Ing Jorge Rosasco
Mod 9 Capa límite (versión preliminar)
3
En la Fig .9.2_1 se observa la distribución de líneas de equipotencial definidas por la ecuación [9.2.4] cuando la circulación Γ=0, representadas en color lila, las líneas azules representan el campo de equicorrientes, ambas son funciones del tipo r = f (θ) que se obtienen y grafican cuando se van atribuyendo constantes numéricas mayores o menores que cero para Φ y Ψ. Dentro del círculo blanco se observan las líneas de equipotencial para el dipolo, las líneas de corriente para el dipolo no se han representado en esta zona, pero se observan en el diagrama auxiliar de la Fig. 9.2_2, observe que la unión de los campos matemáticos define las corrientes como si hubiera un cilindro sólido interpuesto en la corriente (en línea blanca) interceptado por un flujo plano ideal, este círculo se corresponderá en los cálculos con la línea de equicorriente Ψ = 0 que embiste desde izquierda y que se bifurca a partir del punto de estancamiento frontal en dos semicircunferencias secantes al eje x .1 Las componentes de velocidad para el flujo compuesto en coordenadas polares (ver temática del punto 7.7.1) pueden obtenerse entonces ya sea de [9.2.4] o [9.2.5] :
rrV
rV
rV
rV
rRV
ππηθ
θθ
θπη
πθηθ
222sin1
cos2222coscos
Γ+⎥
⎦
⎤⎢⎣
⎡+∞−=
∂Φ∂
=
⎥⎦
⎤⎢⎣
⎡−∞=−∞=
∂Φ∂
=
[9.2.6]
De la primera [9.2.6] podemos ver que podemos definir un valor de ajuste de la intensidad del dipolo η, que haga nula la velocidad radial para un radio Ro que definamos, esta es una condición lógica para el borde o superficie de un objeto, ya que la línea de corriente de un fluido ideal, lo transita solamente con velocidad θV por su periferia tangente, (condición de superficie con flujo sin viscosidad), y variando la intensidad η podemos ajustar el valor de Ro con una línea de corriente periférica de radio Ro , para el valor adoptado de velocidad de corriente libre, entonces tomamos como intensidad del dipolo:
∞=→=⎥⎦
⎤⎢⎣
⎡−∞ VoR
oRV 22022
πηπη [9.2.7]
Partiendo de la hipótesis de una línea de corriente de radio Ro, sobre el borde tangente al cilindro, la velocidad es solamente tangencial y no puede haber componentes de velocidad normal (recordemos que estamos trabajando con flujo ideal de viscosidad nula). Así, vemos que si bien estamos modelando con funciones matemáticas, se crea una condición que permite simular un objeto sólido con forma de cilindro en flujo ideal, es un caso particular del ovalo de Rankine Fig.7.8_1, cuando en lugar de un doblete se usa un dipolo. Con este ajuste de la intensidad η y reemplazando [9.2.7] en [9.2.6], queda:
rrRoVV
rRoV
rRV
πθθ 22
21sin
22
1cos
Γ+⎥⎦
⎤⎢⎣⎡ +∞−=
⎥⎦⎤
⎢⎣⎡ −∞=
∂Φ∂
= [9.2.8]
Estas serían las distribuciones de velocidad en coordenadas polares para todo punto del campo en el entorno del cilindro, cada punto tendrá dos componentes de velocidad, dadas por las [9.2.8], que compuestas darán la velocidad tangente a la línea de corriente; r y θ se toman a partir del origen. 1 La figura 9.2_1,está tomada del sitio: Math Pages_physics.

FUNDAMENTOS DE MECANICA DE FLUIDOS _ Ing Jorge Rosasco
Mod 9 Capa límite (versión preliminar)
4
Las componentes de velocidad sobre la periferia del cilindro, también se calculan a partir de las [9.2.8], como caso particular para la superficie del cilindro, reemplazando r por Ro .siendo:
RoVV
oRV
πθθ 2
sin
0Γ
+∞−=
= [9.2.9]
Los puntos de estancamiento, se producen cuando 0 ,0 == θVRV , ya tenemos, sobre el cilindro la primera, buscamos la segunda reemplazando:
oRVRoVV
RV
∞
Γ=→=
Γ+∞−=
=
πθ
πθθ 4
arcsin02
sin
0 [9.2.10]
Que da dos valores de θ, sobre el cilindro en θ y en (- θ+180º). De la segunda de las [9.2.10], en el caso particular que no haya circulación Γ=0 , los puntos de estancamiento estarán a 0 y 180º, si Γ ≠ 0, sin θ variará entre +1 y -1, para valores:
∞≤Γ≤∞− VoRVoR ππ 44 Caso 1.- si Γ= 0 , Flujo simétrico y puntos de estancamiento en θ = 0 y 180º Fig. 9.2_2 Los puntos de estancamiento se `presentan en 0º y 180º, la intensidad del dipolo, se ha ajustado al valor deseado de Ro, y ∞V obteniéndose una línea de corriente referencial cerrada, que representa un corte del cilindro (zona sombreada), las líneas de corriente, se dividen entonces en dos regiones, una interior al cilindro, y que no intervienen en el análisis del campo, y otra exterior al mismo. Caso 2.- si Γ tiene un valor negativo, (lo que equivale a una circulación en sentido horario), por ejemplo si tomamos.
º2102,º3012/1sin2 =−=→−=→∞−=Γ θθθπ VoR Vemos que en este caso, el flujo tiende asintoticamente a ser horizontal en ∞± . En referencia a la Fig 9.2_.3, si imaginamos que el cuadrado que rodea el gráfico es un volumen de control, el flujo que ingresa por la derecha debe ser igual al que sale por el borde izquierdo, o sea los caudales de ingreso y egreso son iguales, sin embargo se observa que el caudal que pasa por la zona superior del cilindro es mayor que para

FUNDAMENTOS DE MECANICA DE FLUIDOS _ Ing Jorge Rosasco
Mod 9 Capa límite (versión preliminar)
5
la zona inferior, o sea concluimos que la velocidad debe ser mayor en la parte superior que en la inferior, ya que los espacios entre el cilindro y el volumen de control en estas partes son iguales. Esto resulta lógico, también si pensamos que el flujo de la circulación se adiciona en la zona superior y se resta en la inferior. Fig.92_3 Caso 3.- cuando la circulación tiene un valor dentro del entorno dado, por ejemplo ∞−=Γ VoRπ4 en este caso º2702,º9011sin =−=→= θθθ lo que significa que los dos puntos de estancamiento son coincidentes en el vértice inferior. Es la condición donde los caudales por los pasajes superior e inferior presentan mayor diferencia y la velocidad por la zona superior será máxima. Para los casos de circulación positiva (antihorario), los esquemas son simétricos respecto al eje x , ocurriendo la mayor velocidad de escurrimiento para la zona del vértice inferior del cilindro. Fig.92_4 9.2.1.- Distribución de presión para los casos analizados. En el caso de flujo potencial, sin intercambios de calor y trabajo, y sin pérdidas internas de energía debido a que µ = 0 , la ecuación integral de energía se reduce a la Ecuación de Bernuolli, en este caso en el plano:
0)12(2
12)12(1=−+
−+− yygVVpp
ρ

FUNDAMENTOS DE MECANICA DE FLUIDOS _ Ing Jorge Rosasco
Mod 9 Capa límite (versión preliminar)
6
Aplicada considerando las condiciones p1, V1, y1 para flujo libre en el infinito2, sobre la línea de corriente que embiste al cuerpo en el punto de estancamiento como se observa en la Fig. 9.2_5, y las condiciones p2, V2, y2, en el punto de estancamiento, daría: tomando en cuenta que V1 = V∞, p1 = p∞ = pat, que V2 = 0, y que y1 = y2: Fig.9.2_5
221
2 ∞+== Vatptpp ρ
Donde identificamos con pt a la presión absoluta total de estancamiento, que es la máxima posible en
este campo, también al término: 221
∞Vρ se lo denomina presión dinámica del flujo. Para otro par de
puntos 1 y 2 , donde 1 está en infinito y 2 es genérico en proximidades del cuerpo, o sobre el cuerpo en una posición diferente al punto de estancamiento, ( p, V, y) , ahora sobre un desplazamiento arbitrario, (ya que estamos en presencia de un flujo irrotacional), Fig.9.2_6, tendremos:
1 12 22 2( ) ( )2 2
p p V V p p V Vat atρ ρ= + − → − = −∞ ∞
Fig.9.2_6
Dividiendo en ambos miembros por la presión dinámica, 221
∞Vρ obtenemos un coeficiente adimensional,
denominado coeficiente de presión, Cp, que nos da valores relativos a un valor cero en infinito, y uno, en los puntos de estancamiento del flujo donde V=0 sobre el objeto, es decir:
2 Cuando hablamos de un punto o condición de infinito, realmente estamos indicando un punto suficientemente alejado del cuerpo, para que éste no interfiera con las condiciones del flujo, o sea el punto en condición de no perturbado por el cuerpo.

FUNDAMENTOS DE MECANICA DE FLUIDOS _ Ing Jorge Rosasco
Mod 9 Capa límite (versión preliminar)
7
⎥⎦⎤
⎢⎣⎡
∞−=
∞
−∞=
∞
−= 2
21
221
)22(21
221 V
V
V
VV
V
patpCpρ
ρ
ρ [9.2.11]
Con esta definición del coeficiente, podemos determinar y graficar los valores relativos de presión en el campo próximo al cilindro y sobre el cilindro. Tomemos por ejemplo el caso 1, como VR = 0, tendremos para calcular el coeficiente de presión sobre el cilindro.
θθ sin20
∞−==
VVRV
y para el coeficiente de presión:
θθ 2sin412
2)(sin241 −=⎥⎦⎤
⎢⎣⎡
∞∞−=
VVCp [9.2.12]
Estas distribuciones de presión se han graficado en diagramas polares y se muestran en la figura siguiente. Fig.9.2_7 De la fórmula [9.2.12], se calcula el valor del coeficiente en los puntos de estancamiento, Cp=1, en el hombro a 90º Cp= - 3; asimismo para los puntos de la superficie ubicados a +/-30º y +/-150º , Cp=0 (tome en cuenta que es un diagrama polar, es decir los valores que adopta el coeficiente se toman sobre coordenadas angulares y un módulo definido que determina los puntos de la curva y que Cp es un valor escalar radial que puede descomponerse para tener un valor para x y para y. Para el caso 2, del cilindro con circulación tendremos:
)sin21(sin22
)2(sin2
0
θθππ
θθ +∞−=∞−∞−=−
+∞−=
=
VVVRo
RoVoVV
RV
Reemplazando en [9.2.10]
2 2(1 2sin )1 4sin (1 sin )2VCp
Vθ θ θ+⎡ ⎤∞= − = − +⎢ ⎥⎣ ⎦∞
SUCCION
SOBRE PRESION

FUNDAMENTOS DE MECANICA DE FLUIDOS _ Ing Jorge Rosasco
Mod 9 Capa límite (versión preliminar)
8
Estas distribución de presión se ha graficado en un diagrama polar y se muestran en la figura siguiente. Fig.9.2_6 De la representación de los coeficientes de presión se observa que para el caso 1, Fig.9.2.5, las distribuciones resultan simétricas para los ejes x e y, esto significa que no habrá fuerzas netas resultantes es decir: ∑ ∑ == ,0,0 FyFx Este resultado da lugar a la denominada paradoja de D’Alambert, ya que a pesar de tener un cilindro embestido por una corriente, no se obtiene una resultante de resistencia en esta dirección, lo que contradice la experiencia práctica, pensemos por ejemplo en el tronco de una palmera vista desde arriba embestida por el viento, nuestra imagen mental es que la vemos balancearse y moverse (furiosamente en el caso de un huracán), por lo cual la corriente efectivamente produce fuerzas en su dirección, lo que contradice nuestros resultados. La discrepancia sin duda surge de la principal simplificación hecha para el flujo al suponerlo no viscoso con lo cual vemos que la viscosidad debe jugar un papel preponderante en el fenómeno que no hemos tenido en cuenta, sin embargo, los valores de medición experimental de velocidades y presiones en las cercanías (digamos a partir de unos pocos milímetros de la superficie del cilindro y en particular en el semi cilindro frontal, se corresponden bien, tanto con las distribuciones de velocidad como de presión obtenidos con el modelo del flujo potencial, es decir el campo de velocidades y presiones no parece tener grandes discrepancias con el valor teórico en la zona frontal próxima al cilindro. Estas diferencias en el campo se hacen menores aun si el cuerpo es perfilado con la corriente, como un pez, un dirigible, o el perfil del ala de un avión. Arribamos entonces a la conclusión que la diferencia de los modelos para flujo real respecto del flujo teórico o potencial, se debe reducir a fenómenos que se producen en una pequeña zona próxima a la superficie, surge así en forma natural el concepto de que en esta zona próxima a cualquier objeto embestido o inmerso en una corriente no podremos despreciar la influencia de la viscosidad y que denominamos capa límite. Para el caso 2, Fig.9.2_6, y aun con flujo ideal, vemos que el diagrama es no simétrico según el eje y, aquí las zonas positivas (sobre presión con valores de Cp > 0 ) están en la parte inferior y las negativas, depresión o succión con valores de Cp <0 en la región superior del cuerpo, dando lugar a una componente vertical simétrica en la dirección positiva del eje y.
SUCCION
SOBRE PRESION
v∞

FUNDAMENTOS DE MECANICA DE FLUIDOS _ Ing Jorge Rosasco
Mod 9 Capa límite (versión preliminar)
9
La fuerza resultante, la podemos calcular integrando estas distribuciones sobre el cilindro y estarán dadas como fuerza por unidad de profundidad, o largo del cilindro como:
θθπ
dRopLF ∫ −=2
0
sin
Con
RoVV
VVpp
πθ
ρ
2sin2
)22(21
Γ+∞−=
−∞+∞=
Al reemplazar los valores [9.2.12] en la integral y operar, llegamos a la expresión general:
Γ−= VLF ρ [9.2.13] La resultante vertical tiene la dirección del eje y ,con sentido positivo o negativo según sea el sentido de la circulación, a la fuerza se la denomina con la letra L que proviene del ingles (Lift) o sustentación, que es lo que realmente ocurre para un cilindro con circulación. En el ejemplo particular del caso 2, reemplazando con:
∞−=Γ VoRπ2 , resulta:
22 ∞= VoRLF πρ [9.2.14] Esta sustentación que se presenta con la combinación de una corriente uniforme y una circulación, se denomina Efecto Magnus. denominado así en honor al físico y químico alemán Heinrich Gustav Magnus (1802-1870), Analizando dimensionalmente el segundo miembro de la expresión [9.2.13],
⎥⎦⎤
⎢⎣⎡=⎥⎦
⎤⎢⎣⎡=⎥⎦
⎤⎢⎣⎡
⎥⎦⎤
⎢⎣⎡
LF
TM
TLL
LM 22
3
Es decir nos da una fuerza por unidad de longitud del cilindro según z. En flujos reales la circulación como vimos puede generarse a partir de una rotación de cilindros o esferas según el eje z, ya que los efectos viscosos la trasmiten capa por capa, el cilindro trasmitiría su cantidad de movimiento a través de la primera capa de fluido en este caso adherida a la superficie, hacia las capas exteriores, de esta manera el efecto Magnus, es observable en nuestro entorno, por ejemplo el “efecto” en los balones de fútbol o bolas de tenis cuando se impulsan estos elementos generando en ellos traslación y rotación simultáneas (es decir una corriente uniforme y una circulación en flujo real, relativa a ellos), observando que se mueven en trayectorias curvas debidas a la presencia de una sustentación perpendicular a la dirección del movimiento principal. Cabe destacar que si el fluido fuese ideal o potencial, la rotación de esfera o cilindro, no movería ninguna capa de fluido “el cuerpo patinaría sin arrastrar capas de fluido” y sería necesario generarla a través de un vórtice matemático centrado como hicimos previamente para flujos potenciales.

FUNDAMENTOS DE MECANICA DE FLUIDOS _ Ing Jorge Rosasco
Mod 9 Capa límite (versión preliminar)
10
En resumen los modelos matemáticos individuales y sus combinaciones, nos permiten arribar a resultados aproximados útiles como simular objetos sólidos y obtener distribuciones de velocidad y presión que son muy aproximadas en fluidos reales a una cierta distancia del objeto. 9.3.- Análisis de las fuerzas sobre objetos, para flujos ideales y reales. En el punto anterior, vimos que para una esfera sin circulación se cumplía que: ∑ ∑ == ,0,0 FyFx 9.3a.- Fuerzas sobre objetos a partir de la teoría de flujo potencial. Partimos de la base que las fuerzas se aplican sobre los objetos a partir de partículas fluidas en contacto inmediato con la superficie. En el caso de considerar flujos potenciales, la partícula solamente impondrá fuerzas de presión o normales a la superficie , ya que se descarta la acción de las fuerzas tangenciales por tratarse de flujo potencial.. En la Fig. 9.3_1, observamos una porción del corte circular del cilindro y una fuerza diferencial aplicada en un segmento ds, del mismo Fig.9.3_1 El diferencial de fuerza aplicado es θdRobpdsbpdAp == , donde b es el largo del cilindro según la dirección del eje z. A la resultante de todas estas fuerzas de presión se denomina Resistencia al avance o simplemente Fuerza resistente y la indicamos con FP. . Llamaremos Fuerza de arrastre y la indicaremos con FD , a la componente de FP. en la dirección de x, y Fuerza de sustentación a la componente de FP. en la dirección de y. que indicaremos con FL , el subíndice D proviene de drag o arrastre en ingles y L de lift o elevación . entonces:
cossin
dF p dADdF p dAL
θθ
= −= −
Integrando para el cilindro,

FUNDAMENTOS DE MECANICA DE FLUIDOS _ Ing Jorge Rosasco
Mod 9 Capa límite (versión preliminar)
11
θθθθ
θθθθ
ππ
ππ
dpbRodbRopF
dpRobdbRopF
L
D
∫∫
∫∫
−=−=
−=−=
2
0
2
0
2
0
2
0
sinsin
coscos
Si bien para el circulo, la distribución de la presión en función del ángulo es fácil de obtener disponiendo de la función de p en función de la posición angular, que se puede obtener a partir de las expresiones de θV y la ecuación de Bernuolli, esto no será tan fácil en el caso de geometrías de la sección más
complicadas, por eso se vincula a estas expresiones con el Coeficiente de Presión ya que este vincula la presión manométrica con la velocidad θV .
→⎥⎦⎤
⎢⎣⎡
∞−=
∞
−∞=
∞
−= 2
21
221
)22(21
221 V
V
V
VV
V
patpCpρ
ρ
ρ
∪→→
∞=→==∞ nAVCpFpA
FpmanpVCp 2
21 2
21 ρρ
Teniendo en cuenta que el coeficiente de presión está definido en coordenadas cilíndricas, podemos definir también componentes del mismo referidos a un valor según x y otro según y , podemos entonces escribir:
xAVDCDF 221
∞= ρ en este caso CpxDC =
yAVLCLF 221
∞= ρ en este caso CpyLC =
En estas ecuaciones, Ax es las proyección del área de la superficie del cilindro visto en la dirección x , en este caso 2 Ro b, análogamente Ay es la proyección visto en la dirección y , y en este caso tiene el mismo valor. Para el caso del cilindro con circulación embestido por una corriente uniforme, FD = 0 (Paradoja de D’Alambert) y Γ−= VLF ρ (Efecto Magnus). 9.3b.- Fuerzas sobre objetos a partir de la teoría de flujo real. En este caso hacemos referencia a la Fig. 9.3_2, en la cual aparecen para cada punto de la superficie del cilindro, tanto la fuerza normal, como la tangencial o pelicular, ya que en este caso de flujo real suponemos la viscosidad diferente de cero, y por tanto la existencia de fuerzas tangenciales.

FUNDAMENTOS DE MECANICA DE FLUIDOS _ Ing Jorge Rosasco
Mod 9 Capa límite (versión preliminar)
12
Fig.9.3_2 En este caso tendremos:
θτθθτθ
cossinsincos
dApdALdFdApdADdF
−−=+−=
y las fuerzas totales:
θθτθθθτθ
θθτθθθτθ
ππ
ππ
dpbRodbRobRopF
dpRobdbRobRopF
L
D
]cossin[]cossin[
]sincos[]sincos[
2
0
2
0
2
0
2
0
−−=−−=
+−=+−=
∫∫
∫∫ [9.3.1]
Las expresiones integrales anteriores, resultan en general difíciles de evaluar teóricamente aun para el cilindro, ya que no resulta fácil obtener una expresión de la presión en función de la posición de los puntos de superficie, en particular la tensión tangencial, esto se debe a las dificultades impuestas por la transición de capa límite laminar a turbulenta y por el fenómeno de separación, por eso es conveniente trabajar con coeficientes que pueden ser evaluados experimentalmente. Comencemos con la Fuerza de arrastre, para ello, aplicamos la relación ya obtenida en análisis dimensional, ya que nuestra fuerza resultante debe quedar vinculada con la componente de presión y la componente de viscosidad:
(Re)Eu f= que al poner en forma explícita el nº Eu y aplicado a un cilindro de largo b queda::
(Re) (Re)2 2 ( 2 )F Ff f
V A V b Roρ ρ= → =
∞ ∞
esto lo podemos expresar en este caso para la resultante de las fuerzas horizontales como:
xAVCF DD2
21
∞= ρ siendo (Re)DC f=
siendo Ax la proyección del área del cilindro visto en la dirección x , también vemos que en este caso CD es una función del número de Reynolds pero se torna en una constante para un Re definido, y como FD posee una componente de presión y una componente de viscosidad, CD podría también expresarse como una suma de dos coeficientes respectivos:

FUNDAMENTOS DE MECANICA DE FLUIDOS _ Ing Jorge Rosasco
Mod 9 Capa límite (versión preliminar)
13
CD = Cpx + Cvx Con un procedimiento similar, podemos arribar a la expresión general para la fuerza de sustentación :
yAVLCLF 221
∞= ρ siendo (Re)C fL =
FL pose también una componente de presión y una componente de viscosidad, CL y podría también expresarse como una suma de dos coeficientes respectivos: CL = Cpy + Cvy. Observe que los coeficientes de arrastre pueden ser definidos como los cocientes siguientes:
]2/[2
VxADF
DCρ
=
]2/
[2V
yALFLC
ρ=
Los segundos miembros representan una constante multiplicada por el nº de Eu lo que implica que para objetos geométricamente semejantes los CL y CD son iguales y solamente hace falta evaluarlos una vez para tener un valor que sea válido para toda la familia de objetos semejantes, también las curvas que representan la relación funcional Eu vs Re, es habitual entonces verlas en los manuales como CD o CL en función de Re. Una conclusión interesante para lo anterior, es que si consideramos una placa plana embestida por una corriente uniforme, Fig. 9.3_3 , primero puesta horizontalmente, y luego en forma vertical. Fig.9.3_3 la aplicación de las fórmulas 9.3.1, nos indica que para el caso a,
0
]sin[
=
== ∫∫L
AA
D
F
dAdF τθθτ
o sea concluimos que para la placa plana horizontal, la fuerza de arrastre solamente depende de la viscosidad.

FUNDAMENTOS DE MECANICA DE FLUIDOS _ Ing Jorge Rosasco
Mod 9 Capa límite (versión preliminar)
14
En el caso de la figura b ,
0
]cos[
=
=−= ∫∫L
AA
D
F
pdAdpF θθ
Ahora concluimos que la fuerza de arrastre para la placa plana vertical, solamente depende de las fuerzas de presión. En la figura siguiente Fig.9.3._4, se observa la variación del coeficiente de presión teórica representada en un gráfico (x,y): a.- flujo ideal y para un cilindro sin rotación de gran longitud según el eje z perpendicular a la figura, y b.- flujo real, correspondiente a un Re = 7.10 5. Fig.9.3_4 El flujo teórico y los valores de presión y velocidad de un flujo ideal sobre cuerpos como el cilindro, se obtiene como vimos, por las llamadas técnicas de superposición de flujos potenciales, el valor final de la función de presión adimensionalizada o coeficiente de presión en función de la posición angular que obtuvimos era:
θρ
2 412
21
senV
pppC −=
∞
∞−= [9.3.2]
es fácil ver que para el primer caso, con θ = 0° y θ= 180° los valores adimensionalizados son Cp = 1, de donde, el valor de la presión en los puntos de estagnación es el valor conocido: p = pat + ½ ρVo2 = pat + q , al valor q se lo denomina presión dinámica. Si analizamos el valor de la fuerza neta horizontal o fuerza de arrastre y la fuerza neta vertical o sustentación que se produciría sobre el cilindro embestido por un flujo ideal; como el diagrama de presiones teórico es simétrico sobre ambos ejes, la resultante sería cero según vimos.
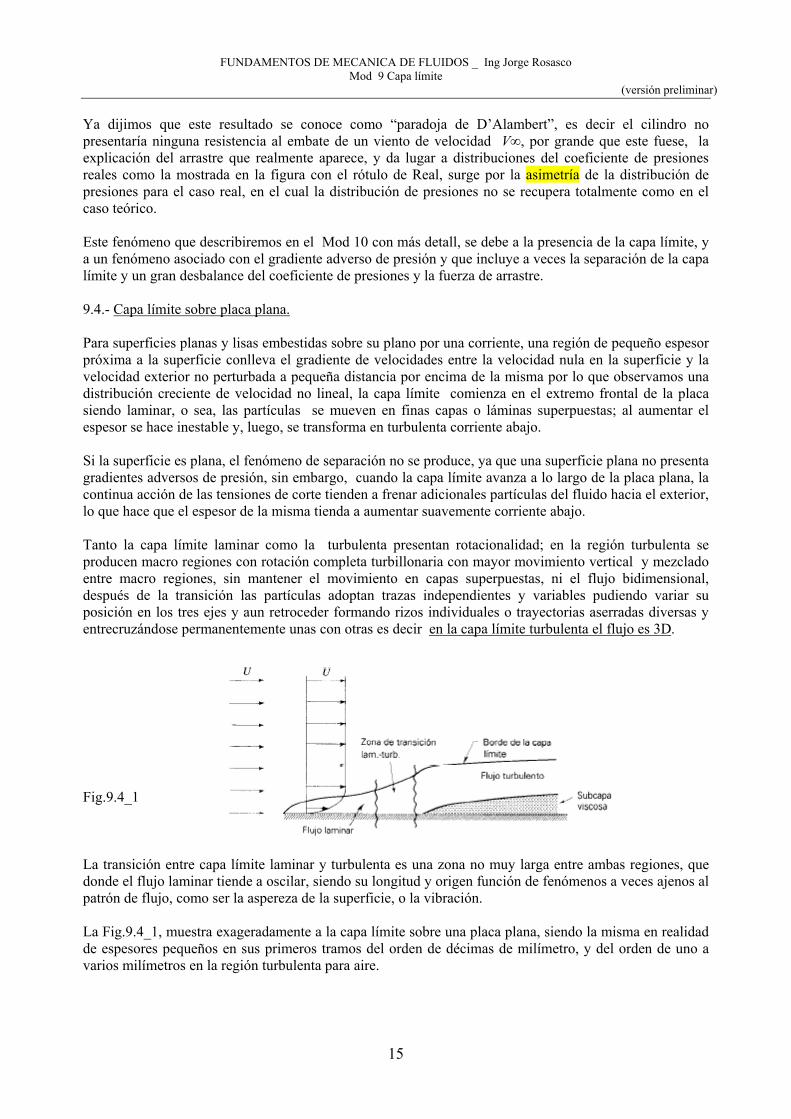
FUNDAMENTOS DE MECANICA DE FLUIDOS _ Ing Jorge Rosasco
Mod 9 Capa límite (versión preliminar)
15
Ya dijimos que este resultado se conoce como “paradoja de D’Alambert”, es decir el cilindro no presentaría ninguna resistencia al embate de un viento de velocidad V∞, por grande que este fuese, la explicación del arrastre que realmente aparece, y da lugar a distribuciones del coeficiente de presiones reales como la mostrada en la figura con el rótulo de Real, surge por la asimetría de la distribución de presiones para el caso real, en el cual la distribución de presiones no se recupera totalmente como en el caso teórico. Este fenómeno que describiremos en el Mod 10 con más detall, se debe a la presencia de la capa límite, y a un fenómeno asociado con el gradiente adverso de presión y que incluye a veces la separación de la capa límite y un gran desbalance del coeficiente de presiones y la fuerza de arrastre. 9.4.- Capa límite sobre placa plana. Para superficies planas y lisas embestidas sobre su plano por una corriente, una región de pequeño espesor próxima a la superficie conlleva el gradiente de velocidades entre la velocidad nula en la superficie y la velocidad exterior no perturbada a pequeña distancia por encima de la misma por lo que observamos una distribución creciente de velocidad no lineal, la capa límite comienza en el extremo frontal de la placa siendo laminar, o sea, las partículas se mueven en finas capas o láminas superpuestas; al aumentar el espesor se hace inestable y, luego, se transforma en turbulenta corriente abajo. Si la superficie es plana, el fenómeno de separación no se produce, ya que una superficie plana no presenta gradientes adversos de presión, sin embargo, cuando la capa límite avanza a lo largo de la placa plana, la continua acción de las tensiones de corte tienden a frenar adicionales partículas del fluido hacia el exterior, lo que hace que el espesor de la misma tienda a aumentar suavemente corriente abajo. Tanto la capa límite laminar como la turbulenta presentan rotacionalidad; en la región turbulenta se producen macro regiones con rotación completa turbillonaria con mayor movimiento vertical y mezclado entre macro regiones, sin mantener el movimiento en capas superpuestas, ni el flujo bidimensional, después de la transición las partículas adoptan trazas independientes y variables pudiendo variar su posición en los tres ejes y aun retroceder formando rizos individuales o trayectorias aserradas diversas y entrecruzándose permanentemente unas con otras es decir en la capa límite turbulenta el flujo es 3D. Fig.9.4_1 La transición entre capa límite laminar y turbulenta es una zona no muy larga entre ambas regiones, que donde el flujo laminar tiende a oscilar, siendo su longitud y origen función de fenómenos a veces ajenos al patrón de flujo, como ser la aspereza de la superficie, o la vibración. La Fig.9.4_1, muestra exageradamente a la capa límite sobre una placa plana, siendo la misma en realidad de espesores pequeños en sus primeros tramos del orden de décimas de milímetro, y del orden de uno a varios milímetros en la región turbulenta para aire.

FUNDAMENTOS DE MECANICA DE FLUIDOS _ Ing Jorge Rosasco
Mod 9 Capa límite (versión preliminar)
16
Se puede ver también que la pendiente de crecimiento de la capa límite turbulenta es menor que la laminar, debido al mayor intercambio de cantidad de movimiento que proviene de la zona exterior favorecida por el mezclado por intercambio de núcleos mas grandes a la simple difusión molecular de las zonas laminares. También se observa en la figura anterior, una región grisada llamada sub-capa viscosa, que es una zona muy próxima a la superficie donde los efectos de superficie principalmente de origen electrostático, imponen una ralentización de la velocidad y los fenómenos típicos de flujo turbulento. La transición entre los regimenes laminar y turbulento, para flujos cerrados o bien confinados a superficie libre como en los canales, ocurre para valores de Re comprendidos entre 2300 y 4000, mientras que para flujos abiertos sobre placa plana, la transición se inicia aproximadamente para Re 55.10 y finaliza aproximadamente para Re 73.10 . Fig.9.4_2 En la Fig.9.4_2, se observa una distribución típica de velocidad para capa límite laminar, la línea punteada, que marca la separación difusa entre la zona considerada viscosa y la zona considerada invícida, o de flujo potencial, se considera el límite de la capa límite, esto no es un límite material ni una línea de corriente, de hecho, las líneas de corriente la atraviesan esta frontera punteada que define la capa límite, (vectores u) .La línea de límite difuso se toma en el lugar geométrico donde u = 0.99 U. 9.5. Definición de espesor de la capa límite: Del análisis anterior deducimos que desde el borde de contacto de la pared sólida del objeto hacia el exterior de un flujo desarrollado, hay una zona cuya distribución de velocidad y presión está afectada por las tensiones de corte debidas a viscosidad, y porque el fluido se adhiere a la pared, lo que hace que la velocidad V = 0 , sobre el contorno y, a partir de ahí, aparece un gradiente de velocidad que se prolonga una cierta distancia δ que asintóticamente se aproxima hasta la velocidad de corriente libre y a partir de allí, lo valores de distribución son aproximadamente los que indica la teoría de flujo potencial, este gradiente de velocidad para capa límite laminar, dentro de la zona de espesor δ, es el que origina las tensiones de corte, de acuerdo a la relación de Newton:
)( dydVμτ −= [9.5.1]
La zona afectada por las tensiones de corte se denomina “capa límite”. El perfil de velocidades típico de una capa límite viene dado de acuerdo a la figura siguiente:

FUNDAMENTOS DE MECANICA DE FLUIDOS _ Ing Jorge Rosasco
Mod 9 Capa límite (versión preliminar)
17
Fi.9.5_1 En referencia a la figura: U = velocidad del flujo libre desarrollado lejos del objeto, en la posición de coordenada intrínseca s. u = velocidad en proximidad del objeto, variable desde cero a 0.99 U. δ = espesor de la capa límite Por definición, el espesor de la capa límite, se define como
99,0==Uuδ , [9.5.2]
es decir, la altura δ desde la superficie, determina aproximadamente dos zonas de límite difuso: la capa límite por debajo de la línea de puntos, y el flujo abierto o desarrollado por encima de la línea. Observe que se ha denominado la velocidad libre con la letra U, en el caso particular de los flujos abiertos y para placa plana, esta velocidad coincide con ∞V , sin embargo cuando consideramos flujos cerrados en las vecindades del objeto o cuerpos con superficies no planas en flujo externo, la velocidad de corriente libre U puede ser distinta de ∞V mayor o menor , por ejemplo dentro de un conducto convergente o divergente, la velocidad será diferente respecto a la de entrada mayor o menor que ella, por eso en las formulaciones de capa límite se usa U en lugar de ∞V . El flujo en la capa límite para objetos no planos o curvilíneos, está también influenciado por el gradiente de presiones del flujo potencial ideal fuera de la capa, Fig.9.5_2, que aumenta la cantidad de movimiento si la velocidad aumenta y la presión disminuye corriente abajo, y recíprocamente, disminuye su cantidad de movimiento si la velocidad disminuye y la presión aumenta corriente abajo (gradiente de presiones adverso) estas transiciones se producen antes o después del punto del vértice o el hombro de los objetos curvilíneos inmersos en una corriente. Sin embargo una placa plana no produce estos efectos por gradiente de presión. Fig.9.5_2
n
s

FUNDAMENTOS DE MECANICA DE FLUIDOS _ Ing Jorge Rosasco
Mod 9 Capa límite (versión preliminar)
18
En la figura se observa también, que hay un punto D, en el cual la distribución de velocidad produce un punto de inflexión donde el gradiente [ ∂u / ∂y] = 0, que es el punto donde comienza la separación. La curva de distribución de velocidad dada en la figura 9.5_1 es una aproximación teórica que hace concordar los resultados de los cálculos aproximadamente con los valores experimentales. El número de Re para una placa plana o un objeto curvilíneo variará localmente con la posición x tomada desde el borde de la placa o bien por el arco o coordenada intrínseca s tomada desde el punto de estancamiento de proa para un objeto curvilíneo. De un punto a otro según s y antes de la separación si ocurre, el espesor de la capa límite varía, pero la curva en las distintas verticales a la superficie es de la misma familia (normalmente un polinomio cúbico para los fluidos típicos) y responde a los mismos parámetros como veremos más adelante. Otra forma de indicar el espesor de la capa límite aparte de la fórmula [9.5.2], es el denominado espesor de desplazamiento, y puede consultarse en el final de este módulo en Notas de Aplicación. 9.6- Aplicación de la teoría de cantidad de movimiento lineal a la capa límite laminar: La figura siguiente 9.6_1 representa un volumen de control ABCD, tomado alrededor del inicio de una capa límite de placa plana que comprende el fluido por encima de la placa., desde una posición adelantada al borde de la misma. La placa plana teórica tiene un borde afilado donde el flujo se detiene y se considera de extensión infinita en la dirección de x positivo.
Fig.9.6_1
La placa se extiende desde 0 en la dirección x positiva, pero el volumen de control se toma de acuerdo a la figura desde una región de flujo libre hasta una posición genérica x = a. En las figuras anteriores, los espesores de las capas límites dibujadas están muy agrandadas para fines didácticos, siendo los espesores reales en particular para aire de unas pocas décimas de milímetro. Al aplicar la ecuación de cantidad de movimiento para movimiento permanente y despreciando las fuerzas másicas dentro del volumen de control tendremos:
)(→→→
∗= ∫ dAVVFSC
S ρ [9.6.1]

FUNDAMENTOS DE MECANICA DE FLUIDOS _ Ing Jorge Rosasco
Mod 9 Capa límite (versión preliminar)
19
Las fuerzas superficiales se componen de las fuerzas de presión sobre los lados AB y CD que se anulan mutuamente por tratarse de un flujo abierto permanente y las fuerzas que la placa ejerce para mantener el equilibrio del volumen de control que en este caso solamente se considera horizontal. Las integrales del segundo miembro sobre las superficies AB, CD y BC son :
∫∫∫ +−+−=hhh
dyudyuUUdyUxF0
2
00
2 )( ρρρ [9.6.2]
la primera integral es la cantidad de movimiento en dirección x que entra en AB. La segunda es la cantidad de movimiento en dirección x que sale por BC; y la tercera es la cantidad de movimiento en dirección x que sale por CD. Todas por unidad de tiempo y por unidad de profundidad según z, operando en [9.6.1] queda:
esta última es la fuerza activa que el flujo ejerce sobre la placa en la dirección del flujo, también denominada fuerza de arrastre. Aquí se aplica el concepto de relatividad del movimiento, es decir podemos considerar que la placa está quieta en una corriente libre que avanza desde la derecha con una velocidad U, o bien que la placa se mueve con la misma velocidad hacia la izquierda en una corriente quieta. Como la resistencia por unidad de ancho, puede expresarse como una tensión multiplicada por una área, queda:
0
( ) 1a
R x dxoxτ= ⋅∫
por lo que podemos expresar:
dxxdR
oxdxxdR)(
)( 0 =→= ττ
Reemplazando:
∫ −=h
dyuUudxd
ox0
)( ρτ [9.6.3]
La distribución de velocidades para hacer la integración )(yfu = debe cumplir las condiciones de borde:
u =0 en y =0; u =U en y =δ ; llamando δ
ηy
= ;
el perfil de velocidades puede expresarse como:
)(yfUu=
Con el cambio de variable: δ
ηy
= será:
)(ηfUu=
∫∫ −=→−−=hh
dyuUuoaRdyuUuxF00
)( )( ρρ

FUNDAMENTOS DE MECANICA DE FLUIDOS _ Ing Jorge Rosasco
Mod 9 Capa límite (versión preliminar)
20
El Profesor Von Karman estableció soluciones aproximadas de las ecuaciones anteriores buscando una función genérica para el perfil de velocidad en una posición dada de la placa plana, de manera que esta función pudiera cumplir con las restricciones geométricas impuestas en forma general por las Ecuaciones de Navier Stokes.: si 0 0si
si = 0
2si = 0 02
u yu U y
u yy
u yy
δ
δ
= → == → ≅∂
→ =∂∂
→ =∂
la aproximación teórica3 de la distribución de velocidad dentro de la capa, se toma a través de una función de polinomio cúbico siguiente que con los valores adecuados de los factores cumple con las condiciones anteriores.:
2 3u A By Cy DyU
= + + +
Los valores A,B,C,D, son funciones de la posición x , cumpliendo con:
03
20
132
A
B
C
D
δ
δ
=
=
=−
=
llamando yηδ
= queda para la función de vinculación:
y para 1)(
y0 para 3 21
23)(
δη
δηηη
≥=
≤≤−=
f
f [9.6.4]
Este funcional satisface las condiciones de contorno anteriormente indicadas. Entonces, a partir de:
∫ −=h
dyuUudxd
00 )(ρτ
como: δ
ηδ
η dydy=→=
siendo además: δδ
0,99 99,0 == hh
o bien: dyd =ηδ ; reemplazando, multiplicando y dividiendo por 2U , lo anterior queda:
3 La función de polinomio cúbico, se corresponde con la solución obtenida por el criterio de ponderación de las ecuaciones generales de movimiento, de Navier Stokes y Continuidad.

FUNDAMENTOS DE MECANICA DE FLUIDOS _ Ing Jorge Rosasco
Mod 9 Capa límite (versión preliminar)
21
∫∫
∫
−=−=
−=
1
0
21
02
2
0
0
20
)1()(
)(
ηδρηδρτ
ρτ
dUu
Uu
dxdUduU
UuU
dxd
dyuuUdxd h
[9.6.5]
Reemplazando ahora la función
321
23)( ηηη −==
Uuf
queda:
dxdUd
dxdU δρηηηηηδρτ 2
1
0
332
0 139,0 )22
3( )22
31(∫ =−+−= [9.6.6]
En la pared es, como ]1[)(
)()(
)( )(δη
ηηηη
ηηdfd
Udyd
dfd
UdydufUuf
Uu
==→=→=
][23)
223(
)()(
3
00 δ
μηηηδ
μηη
δμμτ UUfU
dydu
y=−
∂∂
=∂
∂==
= [9.6.7]
Igualando las expresiones de τ0 queda:
Udxd
dxdUU
ρμδδδρ
δμ 78,10 ] [139,0][
23 2 =→=
Puesto que δ es una función solamente de x, la integramos:
CxU
+=νδ 78,10
2
2
con ρμν = (viscosidad. cinemática)
Para x = 0 0=δ C = 0 , dividiendo en ambos miembros por 2x
xxU
vx
.2/1
Re65.4Re65,4
65,4
−=→== δδ [9.6.8]
que nos da el espesor de la capa límite en función de la posición, y la tensión sobre la placa la obtenemos reemplazando en [9.6.7]
xUoxxU
x .2/1Re32.0322,03
0 μτρμ
τ =→= [9.6.9]
y la resistencia de arrastre por unidad de ancho de la placa :
LUdxDxRl
3
00 644,0 ρμτ === ∫ [9.6.10]

FUNDAMENTOS DE MECANICA DE FLUIDOS _ Ing Jorge Rosasco
Mod 9 Capa límite (versión preliminar)
22
Siendo L la longitud de la placa, habitualmente, el coeficiente de arrastre CD se expresa en función del coeficiente de resistencia pelicular o viscosas CV y del coeficiente de resistencia de las fuerzas de presión o normales al objeto CP o sea: CD = CP +CV Para una placa plana, de ancho b, el CP es nulo como vimos, por tanto queda:
bLU
CD D ⋅=2
2ρ con:
Re328.1
=DC siendo: μ
ρν
ULU==
L Re ; b: ancho de la placa.
Cuando el número Re alcanza un valor del orden de 5 x 10 5 < Re <1 x 10 6, la capa límite inicia la transición cuasi turbulenta, pero podemos decir que a partir de 7Re 3.10≥ la capa límite es netamente turbulenta. Esto se indica en la Fig. 9.6_2 para una placa plana, en la que se representa el CD en función del nº Re. Observe que las curvas se han representado llenas y los rangos se superponen, esto se debe a que el número crítico de Re en el cual se establecen las transiciones depende también de la rugosidad de la placa y de la forma del borde de ataque de la placa y de ruido ambiental o vibración, asimismo para placa plana la región laminar es normalmente muy corta para los rangos usuales de velocidades con aire o con agua, por lo cual un cálculo aproximado de la resistencia viscosa puede hacerse considerando toda la placa en flujo turbulento o de transición.
Fig.9.6_2
La transición finaliza donde la curva de transición se conecta con la línea que define la pendiente turbulenta, en la abscisa de Re ≈ 73.10 , debajo del gráfico se dan las ecuaciones que manejan el valor del coeficiente de arrastre DC , que para capa límite solamente tiene una componente de fricción viscosa, para cada uno de los rangos:

FUNDAMENTOS DE MECANICA DE FLUIDOS _ Ing Jorge Rosasco
Mod 9 Capa límite (versión preliminar)
23
capa límite laminar:
1.3281/ 2Re
DC =
capa límite de transición:
0.074 17001/5 ReRe
DC = −
capa límite turbulenta:
0.0741/5Re
DC =
9.7- Capa límite turbulenta: La ecuación de la cantidad de movimiento puede usarse para determinar el crecimiento de la capa límite turbulenta y la tensión de corte, de manera análoga a lo ya hecho para capa límite laminar, la base es usar la fórmula de distribución de velocidad para flujo turbulento dentro de tuberías, que era:
7/1
0)()(
ry
uu
mx= con: 2/0 Dr =
y ensayar la fórmula para 7/17/1)()( ηδ
===y
Uuyf
El cálculo de τ0 da en este caso:
12 1/7 1/7 2
0
7(1 )72
d dU dy Lox x dxδ δτ ρ η η ρ
δ= − =∫ [9.7.1]
Para capa límite laminar, al valor oxτ lo igualábamos con:
( )0
duox ydy
τ μ==
Para el caso turbulento, esta ley no es válida, por lo que la igualamos en este caso al valor empírico para la tensión en la pared embestida por un flujo turbulento:
4/120 )(0228,0
δνρτ
UU= [9.7.2]
igualando [9.7.1] y [9.7.2]:
dxU
d 4/14/1 )( 234,0 νδδ =
Integrando suponiendo condiciones de flujo turbulento para toda la placa, o sea condiciones iniciales en x = 0 , 0=δ surge la distribución:

FUNDAMENTOS DE MECANICA DE FLUIDOS _ Ing Jorge Rosasco
Mod 9 Capa límite (versión preliminar)
24
) xU(Recon Re
0,37 )( 292,05/1
4/14/1
υδνδ ==→=
xxU
[9.7.3]
y para la tensión pelicular de resistencia,
5/1)
(029,0 20 xU
U νρτ = [9.7.4]
y la resistencia al movimiento de la placa es:
1 21/52 5
0 1/50
90,036 ( ) 0,036 valido para 5 10 Re 10ReU LR D dx U lx U l
ν ρτ ρ= = = = ⋅ < <∫ [9.7.5]
y en función del coeficiente de Resistencia CD queda para la placa de largo L y ancho b::
5/1Re072,0 −=DC bLVCDxR D ⋅==2
2ρ [9.7.6]
Aquí también el CD está compuesto solamente por la componente de fricción ya que estamos tratando con placas planas. Fig:9.7_1 La Fig. 9.7_1 da un comparativo entre los perfiles típicos adimensionalizados para capa límite laminar y turbulenta, se observa que para esta última las velocidades internas a la capa toman la asíntota más rápidamente que en el caso laminar, esto obedece como habíamos señalado, a un proceso de ecualización fundamentado en el intercambio más intenso de la cantidad de movimiento por intercambio turbulento. Las leyes de resistencia para placas vistas con las ecuaciones anteriores, dan lugar a la gráfica de la Fig.9.6_2 que representa DC en función de Re tanto para capa límite laminar como turbulenta, y el valor de Re de transición.

FUNDAMENTOS DE MECANICA DE FLUIDOS _ Ing Jorge Rosasco
Mod 9 Capa límite (versión preliminar)
25
Notas Complementarias. 9.8.- Definición de espesor de desplazamiento. Una definición útil para el procedimiento de resolución general del flujo en torno a objetos, es el de espesor de desplazamiento, que consiste en hacer un balance másico del flujo que pasa a través de una cota comprendida entre el objeto y la posiciónδ ∗ , llamada línea de desplazamiento, de manera que el flujo neto “ideal” que pase por el sistema desplazado, sea igual al que pasa en la condición real cuando incluye a la capa límite, de manera que podemos trabajar con el sistema desplazado como si fuese flujo ideal, a los efectos de conocer la distribución teórica de líneas de corriente sobre el objeto, su distribución de velocidades y presiones, y separadamente evaluar los aspectos de la capa límite en particular las tensiones debida a las fuerzas tangenciales, y el arrastre pelicular. El desplazamiento lo denominamos con ∗δ y lo medimos desde el objeto hacia fuera, para flujos externos y recíprocamente para flujos internos. Fig.9.8_1 esto significa que la igualdad de caudales volumétricos por unidad de profundidad daría::
0q u dy U dy
δ
∞∞= =
∗∫ ∫
Cambiando los límites e la segunda integral:
0 0q u dy U dy Uδ
∞∞ ∗= = − →∫ ∫
0 0 0U U dy q U dy u dyδ
∞ ∞ ∞∗ = − = −∫ ∫ ∫
entonces, despejando ∗δ , queda:
dyUu ]1[
0∫∞
−=∗δ 9.8.1
En primera aproximación el límite superior, infinito de la integral, puede reemplazarse por el espesor de la capa límite sin cometer gran error, porque el valor de U en ese punto es 0.99 U, con lo cual quedará:
dyUu ]1[
0∫ −≅∗δ
δ 9.8.2
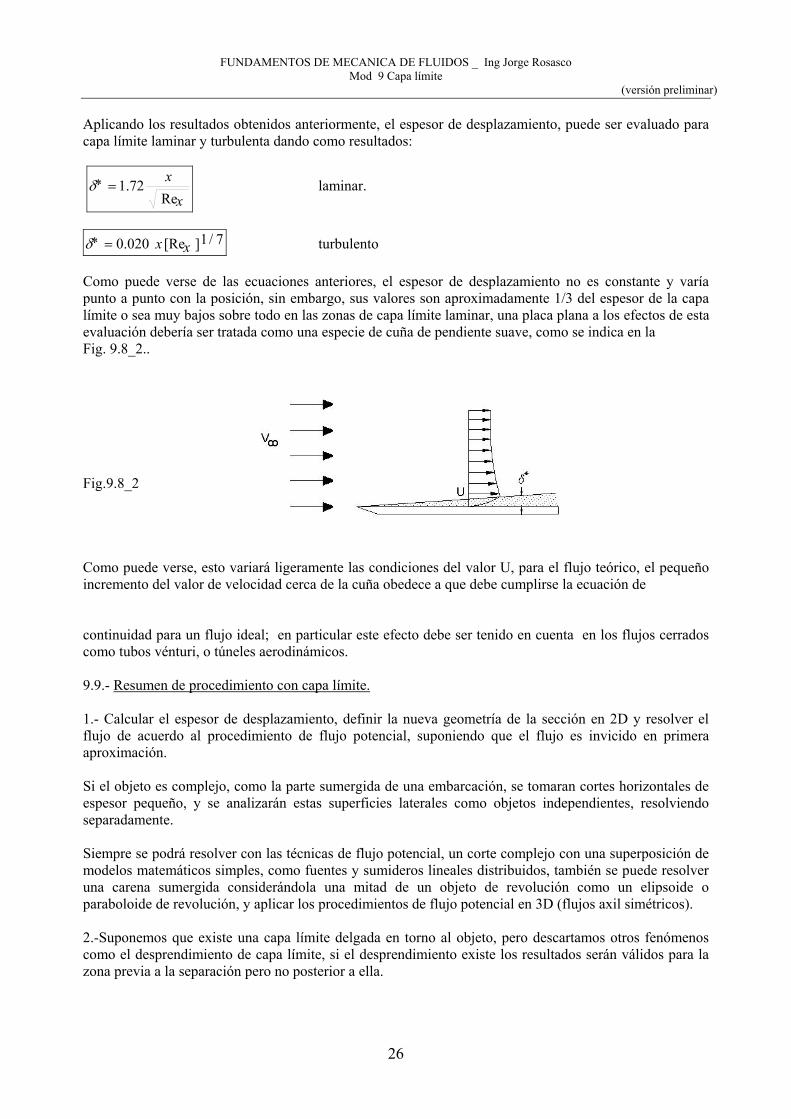
FUNDAMENTOS DE MECANICA DE FLUIDOS _ Ing Jorge Rosasco
Mod 9 Capa límite (versión preliminar)
26
Aplicando los resultados obtenidos anteriormente, el espesor de desplazamiento, puede ser evaluado para capa límite laminar y turbulenta dando como resultados:
x
xRe
72.1=∗δ laminar.
7/1][Re020.0 xx=∗δ turbulento
Como puede verse de las ecuaciones anteriores, el espesor de desplazamiento no es constante y varía punto a punto con la posición, sin embargo, sus valores son aproximadamente 1/3 del espesor de la capa límite o sea muy bajos sobre todo en las zonas de capa límite laminar, una placa plana a los efectos de esta evaluación debería ser tratada como una especie de cuña de pendiente suave, como se indica en la Fig. 9.8_2.. Fig.9.8_2 Como puede verse, esto variará ligeramente las condiciones del valor U, para el flujo teórico, el pequeño incremento del valor de velocidad cerca de la cuña obedece a que debe cumplirse la ecuación de continuidad para un flujo ideal; en particular este efecto debe ser tenido en cuenta en los flujos cerrados como tubos vénturi, o túneles aerodinámicos. 9.9.- Resumen de procedimiento con capa límite. 1.- Calcular el espesor de desplazamiento, definir la nueva geometría de la sección en 2D y resolver el flujo de acuerdo al procedimiento de flujo potencial, suponiendo que el flujo es invicido en primera aproximación. Si el objeto es complejo, como la parte sumergida de una embarcación, se tomaran cortes horizontales de espesor pequeño, y se analizarán estas superficies laterales como objetos independientes, resolviendo separadamente. Siempre se podrá resolver con las técnicas de flujo potencial, un corte complejo con una superposición de modelos matemáticos simples, como fuentes y sumideros lineales distribuidos, también se puede resolver una carena sumergida considerándola una mitad de un objeto de revolución como un elipsoide o paraboloide de revolución, y aplicar los procedimientos de flujo potencial en 3D (flujos axil simétricos). 2.-Suponemos que existe una capa límite delgada en torno al objeto, pero descartamos otros fenómenos como el desprendimiento de capa límite, si el desprendimiento existe los resultados serán válidos para la zona previa a la separación pero no posterior a ella.
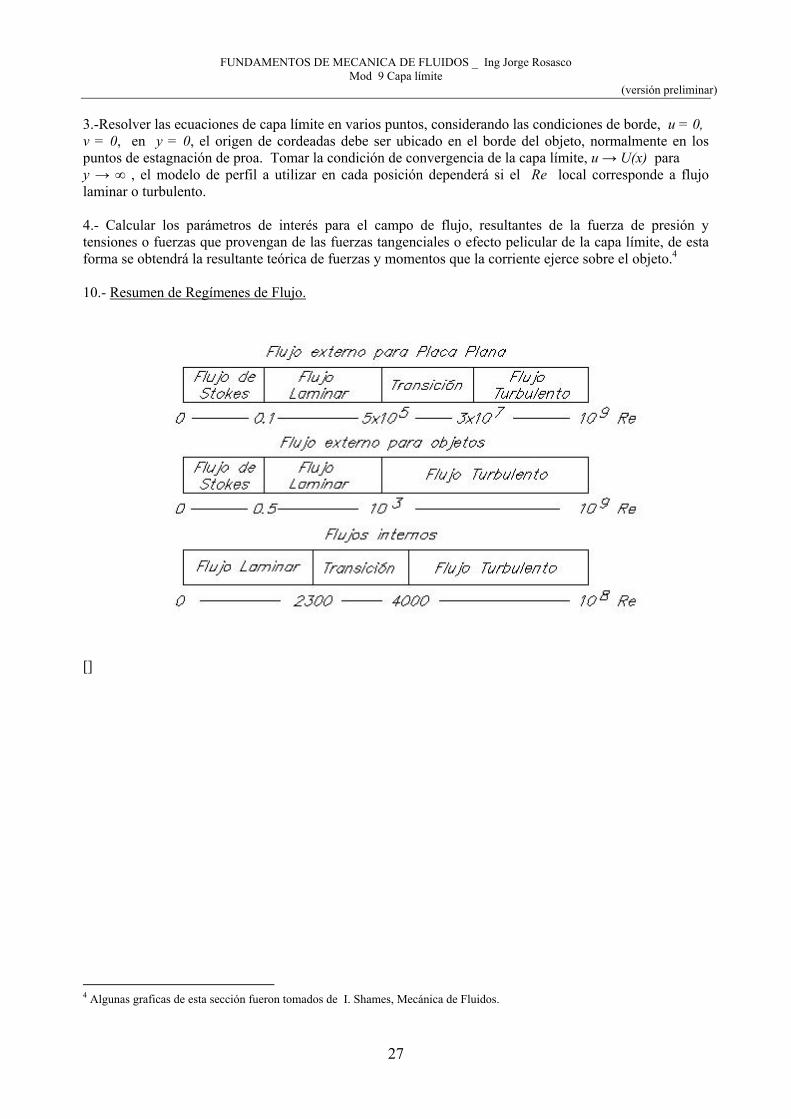
FUNDAMENTOS DE MECANICA DE FLUIDOS _ Ing Jorge Rosasco
Mod 9 Capa límite (versión preliminar)
27
3.-Resolver las ecuaciones de capa límite en varios puntos, considerando las condiciones de borde, u = 0, v = 0, en y = 0, el origen de cordeadas debe ser ubicado en el borde del objeto, normalmente en los puntos de estagnación de proa. Tomar la condición de convergencia de la capa límite, u → U(x) para y → ∞ , el modelo de perfil a utilizar en cada posición dependerá si el Re local corresponde a flujo laminar o turbulento. 4.- Calcular los parámetros de interés para el campo de flujo, resultantes de la fuerza de presión y tensiones o fuerzas que provengan de las fuerzas tangenciales o efecto pelicular de la capa límite, de esta forma se obtendrá la resultante teórica de fuerzas y momentos que la corriente ejerce sobre el objeto.4 10.- Resumen de Regímenes de Flujo.
[]
4 Algunas graficas de esta sección fueron tomados de I. Shames, Mecánica de Fluidos.

FUNDAMENTOS DE MECANICA DE FLUIDOS _ Ing.Jorge Rosasco.
Mod 10 Fuerzas sobre cuerpos sumergidos en una corriente. (versión preliminar)
1
10 FUERZAS SOBRE CUERPOS SUMERGIDOS EN UNA CORRIENTE. 10.1. Consideraciones generales sobre flujos externos. Para el estudio de flujos externos sobre objetos, hacemos las siguientes consideraciones generales: a.- Consideramos el concepto de movimiento relativo entre la corriente y el cuerpo, es decir el sistema de referencia lo colocamos sobre el objeto en estudio, ya sea que esté en reposo con la corriente moviéndose sobre el , por ejemplo un edificio, o recíprocamente el objeto en movimiento en fluido quieto, por ejemplo una aeronave una embarcación, etc., bajo este punto de vista los flujos se estudian como permanentes. b.- La velocidad del flujo libre lejos del cuerpo se considera un escalar porque se trabaja con la componente de la velocidad según x , se la denomina normalmente: oUóV ∞ . Los problemas particulares se evalúan para flujo permanente con una velocidad de corriente libre fija, o para diferentes condiciones de corriente libre, pero una por vez, considerándolas constantes para cada estudio. c.- Con cuerpos de sección constante según z , y suficientemente largos en esa dirección, el flujo se considera 2D y se estudia en el plano (x,y), la componente de velocidad según z se supone nula, y para los cortes de las secciones z cualquiera del cuerpo se supone que tienen el mismo patrón de flujo. Las resultantes de las fuerzas de presión y fricción sobre el cuerpo, pueden producir, sustentación, según su eje y; resistencia o arrastre según su eje x , así como un momento de cabeceo o (pitch) respecto a su centro de masa con eje z., para objetos no simétricos según se vio en el punto 9.3. d.- El flujo se considera para el estudio básico, incompresible, por ejemplo agua a regímenes normales, o aire hasta el valor M ≤ 0.3 e.- Los cuerpos con simetría radial según x se estudian en 2D, porque tienen distribuciones de velocidad iguales para cada plano que contenga su eje longitudinal, estos patrones de flujo se llaman axi-simétricos (una pelota de rugby, un balón de futbol, una bala , los cohetes y misiles etc). Típicamente estos modelos no producen fuerza de sustentación cuando la dirección de la corriente relativa coincide con su eje de simetría radial , solamente resistencia de arrastre en la dirección de su eje longitudinal. Las componentes del vector de momento, de existir, posee tres componentes según los tres ejes que pasan por el centro de masa, y se denominan, cabeceo (pitch) sobre el eje z, , balanceo sobre el eje x, (roll) y guiñado sobre el eje y, (yaw). 10.2.- El fenómeno de separación de capa límite. Ya mencionamos que a lo largo de la placa plana horizontal embestida por una corriente, la capa límite continúa creciendo en la dirección corriente abajo, cualquiera sea la longitud de la placa ya que el si bien el gradiente de presiones en el sentido de la corriente es nulo, sucesivas capas de fluido se van ralentizando a medida que el mismo avanza, debido a la tensión de corte y la difusión molecular, que se va trasmitiendo desde la placa hacia el exterior dentro del flujo no perturbado, incrementando así el espesor de la capa límite. Cuando la presión disminuye corriente abajo, sobre un hombro curvo, como en el caso ya visto del cilindro, esto ocurre desde el punto de estancamiento hasta el vértice superior a 90°, la capa límite tiende a mantener un espesor constante y muy bajo (del orden de la décima de milímetro para aire) ya que la alta velocidad del flujo en las zonas exteriores a la capa límite introducen cantidad de movimiento desde arriba hacia abajo, y esto compensa la ralentización de las partículas desde abajo hacia arriba que produce la tensión de corte pelicular dentro de la capa límite.

FUNDAMENTOS DE MECANICA DE FLUIDOS _ Ing.Jorge Rosasco.
Mod 10 Fuerzas sobre cuerpos sumergidos en una corriente. (versión preliminar)
2
Esto ocurre a la zona de presión en disminución (gradiente de presión favorable) y velocidades en aumento. Lo mismo ocurre con la esfera. Pero ante un gradiente de presiones adverso, es decir, cuando la presión comienza a aumentar nuevamente, después de superar el punto superior, el espesor de la capa límite crece rápidamente. El gradiente adverso de presión y la tensión de corte en la pared, hacen disminuir ahora más rápidamente la cantidad de movimiento dentro de la capa límite, y entonces la viscosidad que se difunde desde la superficie hacia arriba, produce el incremento de su espesor, si esto ocurre sobre una longitud suficientemente larga de la superficie, puede ocurrir que en una región dentro de la capa próxima al cuerpo llegue al reposo, apareciendo una tangente vertical en el perfil de distribución de velocidades de la capa límite, el valor del gradiente de velocidad se anula, / 0u y∂ ∂ = . Este punto que se denomina de “separación”, como se ilustra en la figura siguiente:
Fig.10.1_1
Para una superficie plana y horizontal, la separación no se produce, porque no hay un gradiente de presiones adverso , salvo que este sea inducido externamente. La Fig. 10.1_1 representa este ultimo caso, o bien una región muy ampliada de la superficie del sólido de hombro curvo, que parece recta. En la Fig.10.1_2, se observa un dibujo aproximado de la capa límite sobre un cilindro, liso (líneas de trazos) y sobre un cilindro rugoso (líneas continuas), ambos de igual diámetro y embestidos por una
corriente a igual velocidad en un Re aproximado referido al cilindro de 45.10 . Se observa que la capa límite después del hombro posee mayor espesor, y se separa antes para la superficie lisa. A partir de la separación, el gradiente adverso obliga al fluido a cambiar de sentido cerca de la pared, es decir se produce un retroceso del flujo ya que la presión corriente abajo es relativamente mayor que corriente arriba en el punto de estancamiento posterior del cilindro. Esta región separada de la pared, produce remolinos, y se forma una región particular de flujo debajo de la zona separada, que se llama “estela de remolinos”, este esquema ocurre en forma simétrica para la parte inferior al eje x.

FUNDAMENTOS DE MECANICA DE FLUIDOS _ Ing.Jorge Rosasco.
Mod 10 Fuerzas sobre cuerpos sumergidos en una corriente. (versión preliminar)
3
La energía cinética se gasta en la producción de la estela y el nivel de presión no puede recuperarse totalmente, entonces la diferencia neta de fuerzas de presión entre ambas caras del cilindro genera una fuerza neta de arrastre debida a efectos de presión también llamada “resistencia de forma” en el sentido corriente abajo, o de los x positivos.
Fig.10.1_2 En la Fig.10.1_2, las líneas de trazos, representan la evolución de la capa límite y de la región separada para cilindro liso o rugoso, fuera de la capa límite el flujo tiene las velocidades de la corriente libre equivalentes o muy aproximadamente iguales a la que se obtendrían para un flujo potencial. Entre la zona separada y el eje x, el flujo tiene sentido inverso y se generan remolinos, debidos a los cortantes en direcciones opuestas; en el caso de cilindro liso la capa límite puede ser laminar en todo su curso, antes de sobrepasar el hombro hay un poco de perdida de energía, que se produce por fricción y su espesor aumenta poco, porque la corriente dentro de ella se mueve dentro de un gradiente favorable de presión con difusión molecular muy activa de la cantidad de movimiento de una corriente de alta velocidad desde arriba, pero al llegar al hombro aparece un gradiente adverso, y el espesor de capa límite comienza a aumentar porque empieza a predominar la difusión que proviene desde abajo debido a frenado viscoso desde la superficie y la energía del flujo dentro de la capa a disminuir rápidamente, hasta que se produce el estancamiento y la separación en una región próxima al hombro (punto A para cilindro liso), el flujo entre el punto A y el eje x, corresponde a un modelo vorticoso. altamente concentrado que se denomina turbillonario. Si el Re aumenta más, para el cilindro liso, hay un valor para el cual la capa límite se vuelve turbulenta en el hombro, o cerca de él ; hay un valor de Re en el que el punto A se desplazará súbitamente bastante lejos del hombro a un punto más bajo, a este fenómeno se lo llama inmersión de la capa límite, y ocurre por el refuerzo de energía que proviene del efecto de difusión que proveen las macro regiones de torbellino desde el exterior hacia la capa límite cuando se hace turbulenta y esto provee un mayor intercambio de cantidad de movimiento de velocidades altas. Cuando el cilindro es rugoso o posee hoyuelos, esta transición de capa límite laminar a turbulenta se produce a Re mas bajos y asimismo la separación y la inmersión al punto B. Una capa límite turbulenta produce mayor mezclado con el flujo exterior a la misma y esto incrementa su cantidad de movimiento y retarda la separación.
capa límite laminar para cilindro liso
separación para cilindro liso
separación para cilindro rugoso
capa límite turbulenta para cilindro rugoso

FUNDAMENTOS DE MECANICA DE FLUIDOS _ Ing.Jorge Rosasco.
Mod 10 Fuerzas sobre cuerpos sumergidos en una corriente. (versión preliminar)
4
Esto da lugar a una calle de remolinos mas angosta y por tanto a menor resistencia de arrastre debida a presión.
Fig.10.1_3
En la Fig.10.1_3, puede verse una estimación aproximada de las componentes debidas a presión y a viscosidad del arrastre para un cilindro liso y otro rugoso o rayado de igual diámetro, en el caso del cilindro rugoso, a pesar de haber aumentado la resistencia viscosa o pelicular, la de presión ha disminuido de manera que para el balance total la resistencia o fuerza de arrastre resulta menor. 10.2.- Fuerza resistente sobre objetos sumergidos en una corriente. En el caso general se acostumbra a definir una fuerza resistente total sobre un objeto, como un vector genérico denominado fuerza resistente compuesto por dos componentes: Fuerza de Arrastre en las dirección de la corriente V∞ y Fuerza de Sustentación, perpendicular a ella.
∪∪→+= jLiDR [10.2.1]
a.- Resistencia o fuerza de arrastre .
Indicada con la letra D a veces se define por su terminología en inglés: Drag. (Resistencia de obstáculo), es la resistencia del objeto en el sentido de la corriente lejana V∞ , para un flujo real se compone a su vez de dos fuerzas que se componen en igual dirección, la resistencia de fricción o pelicular, debida exclusivamente a la viscosidad, (skin friction) y la resistencia de forma (form drag), debida exclusivamente a la diferencia de las fuerzas de presión entre la parte frontal y posterior del cuerpo.
Resistencia de arrastre = Resistencia de forma o presión + Resistencia de fricción superficial. La diferencia de presiones es debida también indirectamente a la viscosidad, a través de los efectos de separación de capa límite en la región posterior del objeto, lo que produce una distribución no simétrica de los coeficientes de presión, y una resultante no nula en el sentido de V∞ . Tome en cuenta que cuando definimos la resistencia de arrastre de la placa plana horizontal, ella estaba formada solamente por resistencia de fricción (no había resistencia de forma) ya que la placa tiene espesor teórico cero, y en el coeficiente CD o coeficiente de arrastre incluía solamente la componente de fricción, y en este caso el coeficiente debido a forma o presión es cero. No obstante en general para un objeto que no sea una placa plana se cumple lo anterior.

FUNDAMENTOS DE MECANICA DE FLUIDOS _ Ing.Jorge Rosasco.
Mod 10 Fuerzas sobre cuerpos sumergidos en una corriente. (versión preliminar)
5
Pero en general, la existencia de capa límite con separación, produce que la presión recuperada sea mucho menor, con lo cual la diferencia de presión Δp entre proa y popa es mayor, y se crea la resistencia adicional, atribuible a tensión normal o presión que llamamos “resistencia de forma”, si no hay separación la resistencia es debida principalmente a fricción superficial. Si el crecimiento de espesor y la separación de capa límite pueden evitarse o minimizarse en el diseño de un cuerpo, entonces la capa límite permanece delgada y la presión es casi recuperada totalmente corriente abajo. En éste caso, la resistencia de arrastre, es debida en su mayor parte al efecto pelicular o rozamiento de fricción, siendo muy baja la componente de resistencia de forma, este tipo de cuerpos se denominan “aerodinamizados”.o perfilados. La silueta de los peces y las aves, la sección de las alas de las aves y los aviones son ejemplos de formas perfiladas b.- Fuerza de sustentación. Para algunos objetos especiales que no poseen simetría respecto a los ejes x e y o bien teniendo simetría respecto al eje x la corriente embiste con un pequeño ángulo diferente de cero, como los perfiles aerodinámicos de las alas, bajo determinadas condiciones de posición y velocidad es posible obtener una resistencia de forma, con una componente vertical importante y útil denominada sustentación (Lift), y se indica con la letra L. Para estos casos donde interesa la prominencia de L frente a D, la ecuación [10.2.1] puede describirse como: Resistenciade arrastre total = Resistencia de arrastre útil (Lift) + Resistencia de arrastre inútil (Drag)
O sea que los efectos fluidos sobre objetos producen en general fuerza de arrastre, y en algunos objetos de diseños especiales, también otro tipo de resistencia beneficiosa o aprovechable denominada Sustentación. En el punto [10. 6] volveremos un poco más sobre este aspecto de la sustentación. 10.3.-Ley de Rayleigh de la resistencia de arrastre. Cuando estudiamos las leyes de semejanza, hicimos un ejemplo que permitía hallar las relaciones entre grupos adimensionales para calcular el arrastre o resistencia al avance de un cuerpo cilíndrico liso en un fluido. El análisis nos llevó a obtener la relación genérica siguiente entre dos números adimensionales, el número Euler y el número Reynolds.
Eu = (Re) ( ) ( ) 2 2
F VDf fD V
ρμρ
→ =
Lord Rayleigh observó que la equivalencia es aplicable en el rango de fluidos incompresibles a cualquier forma sumergida en una corriente y no solamente a cilindros o esferas. La longitud característica D puede ser generalizada a cualquier dimensión lineal característica del objeto y el área característica también, aunque en general se toma la sección de la proyección frontal del objeto o la sección de la proyección frontal por unidad de profundidad. Como él estaba interesado en el análisis de fuerzas netas resistentes en objetos tales como placas curvadas, que luego dieron origen a nuestros actuales perfiles de ala, rescribió la equivalencia Eu,=f(Re) de la siguiente manera:

FUNDAMENTOS DE MECANICA DE FLUIDOS _ Ing.Jorge Rosasco.
Mod 10 Fuerzas sobre cuerpos sumergidos en una corriente. (versión preliminar)
6
2 2 2 21 1( ) (Re) 12 2D
V DF D V f V S f C V Sρρ ρ ρμ
= = = [10.3.1]
El cambio de f por f1 obedece a que queremos que el valor de la presión de impacto aparezca de manera
explícita., la presión de impacto )21( 2Vρ que es la presión relativa en el punto de estagnación.
A la función f (Re) la llamó CD (coeficiente de arrastre, o drag coefficient), no perdiendo de vista el hecho de que no es una constante, sino una función del número Re, y por tanto incluye la componente inercial y viscosa. El CD toma el valor de una constante para cada Re dado. a.- Coeficientes de arrastre: Dado lo anterior, a partir de la fórmula de resistencia total para un cuerpo sumergido en una corriente:
212DD C V Sρ= , si conocemos el coeficiente de arrastre o resistencia (Re)fCD = para una familia de
objetos, con ésta sola ecuación podemos obtener la respuesta sobre la resistencia de cualquier objeto de la familia. La determinación de coeficientes de resistencia puede hacerse recurriendo a la teoría o a la experimentación. Es posible obtener CD teóricamente para pocos casos y a velocidades muy bajas, por ejemplo, para esfera de diámetro d en Re< 1 (flujo altamente viscoso), u objetos extremadamente pequeños, en el cual la resistencia está dada por la ley de Stokes:
VdD )3( πμ= , si se expresa en la forma Rayleigh sería:
SVCD D2
21 ρ⋅=
Con 4/2dS π= , para la forma esférica, entonces resulta que:
Re24
=DC ,
ya que si reemplazamos valores, queda:
dVDVVD
D ⋅=⋅⋅= )3(42
124 22 μππρ
μρ
Este es uno de los pocos casos en los cuales podemos hallar el coeficiente de arrastre, valiéndonos solamente de la teoría para el rango de los Re muy bajos, lo que para el aire significa esferas muy pequeñas o velocidades muy bajas o ambas cosas a la vez.

FUNDAMENTOS DE MECANICA DE FLUIDOS _ Ing.Jorge Rosasco.
Mod 10 Fuerzas sobre cuerpos sumergidos en una corriente. (versión preliminar)
7
Fig.10.3_1 La figura [10.3_1]muestra la variación completa de CD con Re para la esfera lisa, y para discos planos normales a la dirección de la corriente (en línea punteada), vemos que el rango cubierto es muy grande de Re = 10 - 3 a Re = 10 6, por esta razón se usa el papel doble logarítmico lo que hace para el primer tramo, que una hipérbola como 24/Re aparezca como una línea recta. En el gráfico de la Fig. 10.3_1, para esferas lisas, se observa a 4.10 5 de número Re., un incremento CD que es debido al aumento del espesor de la capa limite, que comienza a subir hasta un valor aproximado de
510.5Re = , punto en el cual se observa una brusca disminución de CD que marca justamente la inmersión de la capa límite. Esto aparece a una velocidad típica para la cual repentinamente la capa límite para esferas lisas se desplaza súbitamente en sentido horario reduciendo las diferencia de presión entre la cara anterior y posterior del cilindro o esfera y por tanto la resistencia de presión. La inmersión de la zona de separación ocurre casi súbitamente como lo indica la pendiente casi vertical de la curva y se debe a un mayor aporte de energía cinética desde la zona de corriente libre cuando la capa límite se transforma en turbulenta como ya dijimos. 10.4 Disminución de la Resistencia de Arrastre - Aerodinamización: Un ala en general es un cuerpo de forma cilíndrica y sección 2D aerodinamizada o sea una forma de borde anterior redondeado y ahusado hacia la cola, puede ser, simétrico respecto del eje x o ligeramente asimétrico respecto de él. Por otra parte, cuerpo aerodinámizado es un objeto 3D con simetría axial y radial de forma perfilada ahusada como el cuerpo de un dirigible, un delfín o una lágrima. (Fig.10_4.1).
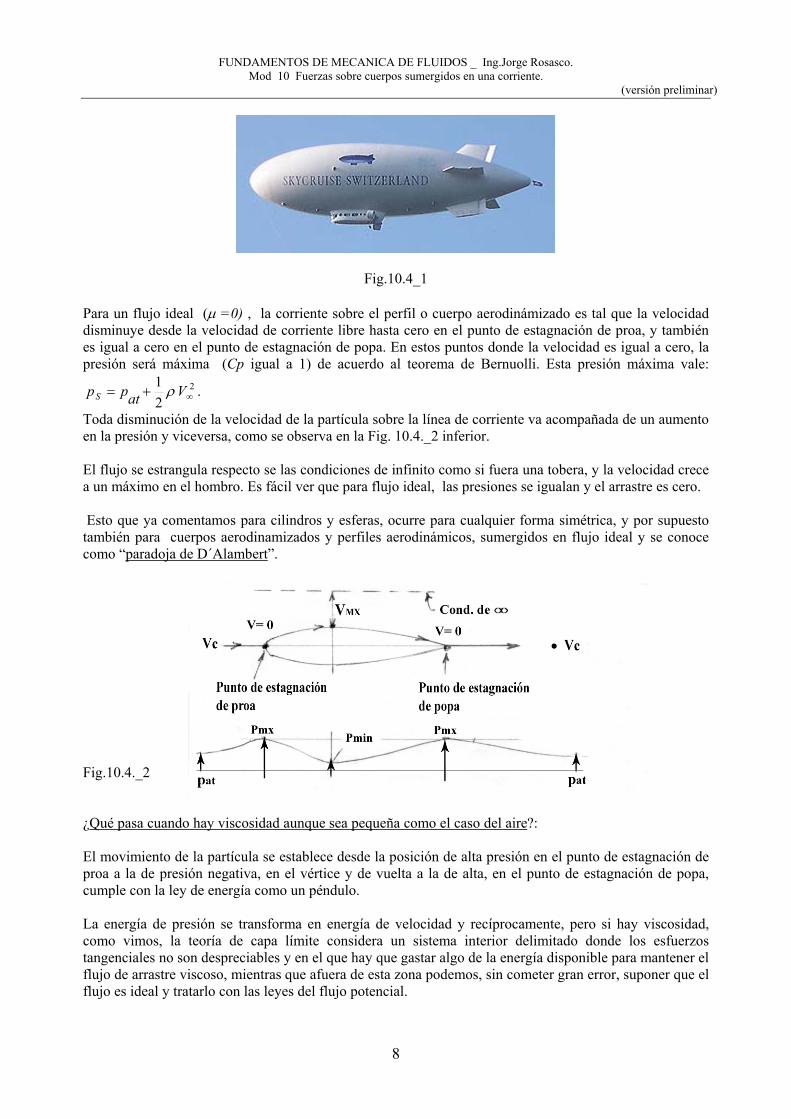
FUNDAMENTOS DE MECANICA DE FLUIDOS _ Ing.Jorge Rosasco.
Mod 10 Fuerzas sobre cuerpos sumergidos en una corriente. (versión preliminar)
8
Fig.10.4_1 Para un flujo ideal (μ =0) , la corriente sobre el perfil o cuerpo aerodinámizado es tal que la velocidad disminuye desde la velocidad de corriente libre hasta cero en el punto de estagnación de proa, y también es igual a cero en el punto de estagnación de popa. En estos puntos donde la velocidad es igual a cero, la presión será máxima (Cp igual a 1) de acuerdo al teorema de Bernuolli. Esta presión máxima vale:
2
21
∞+= VatppS ρ .
Toda disminución de la velocidad de la partícula sobre la línea de corriente va acompañada de un aumento en la presión y viceversa, como se observa en la Fig. 10.4._2 inferior. El flujo se estrangula respecto se las condiciones de infinito como si fuera una tobera, y la velocidad crece a un máximo en el hombro. Es fácil ver que para flujo ideal, las presiones se igualan y el arrastre es cero. Esto que ya comentamos para cilindros y esferas, ocurre para cualquier forma simétrica, y por supuesto también para cuerpos aerodinamizados y perfiles aerodinámicos, sumergidos en flujo ideal y se conoce como “paradoja de D´Alambert”. Fig.10.4._2 ¿Qué pasa cuando hay viscosidad aunque sea pequeña como el caso del aire?: El movimiento de la partícula se establece desde la posición de alta presión en el punto de estagnación de proa a la de presión negativa, en el vértice y de vuelta a la de alta, en el punto de estagnación de popa, cumple con la ley de energía como un péndulo. La energía de presión se transforma en energía de velocidad y recíprocamente, pero si hay viscosidad, como vimos, la teoría de capa límite considera un sistema interior delimitado donde los esfuerzos tangenciales no son despreciables y en el que hay que gastar algo de la energía disponible para mantener el flujo de arrastre viscoso, mientras que afuera de esta zona podemos, sin cometer gran error, suponer que el flujo es ideal y tratarlo con las leyes del flujo potencial.

FUNDAMENTOS DE MECANICA DE FLUIDOS _ Ing.Jorge Rosasco.
Mod 10 Fuerzas sobre cuerpos sumergidos en una corriente. (versión preliminar)
9
Si el gradiente de presión desfavorable desde el vértice hacia atrás, no es muy grande, dentro de la zona viscosa las partículas se mueven a menor velocidad, pero reciben algo de energía desde el exterior para compensar y poder llegar al punto de estagnación de popa y mantener una estela laminar o turbulenta delgada. Fig.10.4._3 Pero si el gradiente de presión adverso es más grande, se produce el atascamiento de la capa límite y la separación. Esto ocurre si el perfil es de mayor espesor que en el primer caso, y con más razón en cuerpos de gran curvatura como cilindros y esferas donde la separación ocurre a partir de Re moderados. Una gran zona separada y calle de remolinos, hace que el coeficiente de presión en la zona separada hasta el punto de estagnación de popa sea próximo a cero, lo que produce un gran pΔ entre proa (Cp=1) y popa, (el desbalance tiene la magnitud de la presión dinámica) y por tanto un gran aumento en la resistencia de forma y un aumento del arrastre, debido ahora a esfuerzos de presión. Por este motivo conviene que la separación ocurra lo más retrasada posible, para tener una calle de remolinos estrecha. Para formas de gran curvatura, como las pelotas de golf, esto puede lograrse, al aumentar la rugosidad mediante los hoyuelos, al efecto que la capa limite laminar sea lo mas corta posible , así la esfera rugosa produce una capa límite turbulenta que comienza antes del vértice, todavía dentro de la zona de gradientes de presión favorables, esto energiza la capa límite turbulenta lo que retrasará la posición de la separación o sea al tener más energía de velocidad permite que el fenómeno de separación se produzca mas bajo hacia el eje x respecto del hombro, disminuyendo así la resistencia de forma. Con la distribución de hoyuelos sobre la superficie se logra que la transición turbulenta y el fenómeno de inmersión se produzcan en los rangos típicos de la velocidad de vuelo de las pelotas logrando mas alcance para la misma energía del golpe inicial.

FUNDAMENTOS DE MECANICA DE FLUIDOS _ Ing.Jorge Rosasco.
Mod 10 Fuerzas sobre cuerpos sumergidos en una corriente. (versión preliminar)
10
Para una bola lisa, la transición a capa límite turbulenta y la inmersión de la zona separada se producen aproximadamente a 5Re 5.10= . La inmersión espontánea de la zona de separación para esfera rugosa, ocurre a un Re menor, del orden
4Re 6.10= (velocidad de la corriente menor para un diámetro dado). El alumno debe observar que la grafica de la derecha es una pequeña porción del grafico dado en la Fig.10.3_1, pero se trata esencialmente del mismo concepto. Esta técnica también se usa en el encastre ala - fuselaje de los grandes aviones comerciales, en esta zona el perfil posee mucho espesor ya que se requiere por razones estructurales del empotramiento del ala al fuselaje, alojamiento de combustible etc. entonces haciendo rugoso el recubrimiento del ala en esta parte se logra una separación más retrasada y menor arrastre.1 10.5.- Resumen de Resistencia sobre cuerpos sumergidos: La “resistencia de arrastre” sobre un cuerpo por su movimiento en un fluido, se define entonces como la componente de fuerza total ejercida sobre el cuerpo en la dirección de la velocidad según x, de acuerdo a la ley de Rayleigh. Esta fuerza está dada por:
21( )2DD C V Sρ= ⋅
donde: 1 La figura corresponde, al número de marzo de 1997 de la revista Scientific American.

FUNDAMENTOS DE MECANICA DE FLUIDOS _ Ing.Jorge Rosasco.
Mod 10 Fuerzas sobre cuerpos sumergidos en una corriente. (versión preliminar)
11
D = Resistencia de arrastre [New]
)21( 2Vρ Presión de impacto o dinámica [ Pa ]
S: Superficie proyectada en la dirección normal al eje x de la sección del cuerpo en [m2]. De acuerdo a las definiciones anteriores la resistencia de arrastre incluye la resistencia de forma y fricción sumadas. La figura anterior (Fig.10.3_1) representa el coeficiente de arrastre CD en función al número Re para esferas, y en la figura (Fig.10.5._1) siguiente, se da el CD en función del número Re para cilindro liso embestido por la corriente. Fig.10.5_1 En este caso se observa también para cilindro liso una disminución brusca de CD para un número de Re casi constante para el cual se produce la inmersión de la zona separada de la capa límite, como en el caso de la esfera, también para un Re aproximado de 5Re 5.10= , de manera que los comportamientos para cilindro y esferas lisos y rugosos son equivalentes. En la tabla siguiente, se dan los coeficientes de arrastre típicos para varias secciones prismáticas y varias relaciones longitud / espesor por lo general mayores a 2 : 1 y cuando no indica nada l >> e o sea la longitud mucho mayor que el espesor; el CD constante también en general está tomado para un intervalo en que el coeficiente cambia poco con el número Re., por ejemplo el intervalo entre 10 3 y 10 5. A la relación l/e se la llama a menudo relación o razón de aspecto.

FUNDAMENTOS DE MECANICA DE FLUIDOS _ Ing.Jorge Rosasco.
Mod 10 Fuerzas sobre cuerpos sumergidos en una corriente. (versión preliminar)
12
En rigor deberíamos decir, que para el coeficiente de arrastre CD para perfiles aerodinámicos, si la relación de aspecto es muy grande o tiende a infinito, está definido solamente como ya dijimos, por la suma de la Resistencia de Forma y la Resistencia de Fricción; pero si la relación de aspecto es finita, entonces CD debe incluir otras formas adicionales de resistencia tales como la Resistencia Inducida que es provocada por los efectos de borde consecuencia de los efectos de la corriente en los extremos del ala , la cual aumenta con el ángulo de incidencia de la corriente. 10.6 Fuerza de Sustentación en perfiles de ala. Basándonos en la de definición que hemos dado de ala o perfil de ala al comienzo del párrafo 10.4, estas pueden ser simétricas o de perfil simétrico respecto del eje x como se indica en la Fig. 10.4._2 en cuyo caso al ser embestidas por una corriente horizontal se crea una resistencia de arrastre; hará falta una fuerza igual y dirigida en el sentido ( – x) para que el perfil de ala no se mueva. Pero si la corriente embiste según un ángulo diferente a 0° y pequeño, digamos inferior a 15° , o bien si embiste con ángulo incluso de 0° en un perfil asimétrico, la distribución de presiones en las superficies superior e inferior del ala deja de ser simétrica y el vector resultante de la Resistencia deja de tener el mismo ángulo de la corriente, y presenta otro más empinado como se muestra en la Fig 10.6._1, siguiente.

FUNDAMENTOS DE MECANICA DE FLUIDOS _ Ing.Jorge Rosasco.
Mod 10 Fuerzas sobre cuerpos sumergidos en una corriente. (versión preliminar)
13
En ella puede verse que para un perfil ligeramente asimétrico y ángulo de incidencia o ataque de la corriente α, el vector Resistencia FR forma un ángulo bastante mayor, a α , así nosotros podemos obtener una descomposición vectorial tomando una Fuerza de arrastre FD paralela a la dirección de incidencia y otra normal a ella que denominamos sustentación FL. Fig..10.6._1 La Resistencia total o Fuerza resistente, se ha descompuesto en las denominadas Resistencia de Arrastre : FD ó D y la Fuerza de Sustentación FL.ó L. Este fenómeno básicamente se emplea para sustentar aeronaves y helicópteros. y por estar aplicando fluidos reales, tanto FD como FL incluyen a las resistencias de presión o forma y las viscosas como ya dijimos; ambas son componentes de la fuerza resistente, y en ultima instancia producidas por efectos de la viscosidad. Se asocian entonces dos coeficientes a ellas, uno de arrastre y otro de sustentación CD y CL. En la Fig.10.6_1 se observa el trazado de las curvas de CD y CL para diferentes ángulos de ataque de un perfil de ala en particular, existiendo un gráfico como el presentado por cada geometría de perfil dada. Los perfiles están clasificados por códigos numéricos de cuatro o cinco dígitos, que establecen para cada dígito una característica geométrica particular del perfil y se encuentran editados en Códices o Libros de Reports.

FUNDAMENTOS DE MECANICA DE FLUIDOS _ Ing.Jorge Rosasco.
Mod 10 Fuerzas sobre cuerpos sumergidos en una corriente. (versión preliminar)
14
Definido el tipo de perfil y ubicado el ángulo de ataque de diseño, las fuerzas netas totales de Sustentación y Arrastre se hallan fácilmente aplicando las fórmulas Rayleigh ya conocidas:
1 22
L C V SL ρ=
1 22
D C V SD ρ=
En las cuales V representa la velocidad de la corriente libre en la dirección α, y S por convención en estos casos donde existe sustentación y arrastre, la superficie de la planta alar proyectada sobre el plano (x,z) o planta del ala Cuando estudiamos el efecto Magnus para la superposición de bloques constructivos de un sistema potencial formado por: - corriente libre, - dipolo y - circulación por vórtice central, obtuvimos como resultado de la superposición matemática de estos flujos una sustentación efectiva vertical y perpendicular a la corriente del cilindro y cuyo diámetro se ajusta con la intensidad del dipolo. La transformación conforme de estos tres flujos da para la transformación del cilindro un perfil aerodinámico teórico en 2D. La distribución de presiones del sistema Magnus quedan también transformadas sobre el perfil dando para este una sustentación efectiva, perpendicular a la línea de incidencia de la corriente. Si bien son todos aspectos de manejo matemático de un flujo ideal, en la práctica el efecto Magnus puede reproducirse haciendo rotar un cilindro en una corriente libre, y asimismo podemos reproducir el fenómeno de sustentación para un perfil de ala práctico. En el perfil de ala la rotación no es necesaria, la circulación es producida por dos mecanismos, a.- tener un perfil asimétrico donde la estela producida por la pequeña separación de capa límite genera vorticidad no compensada (y circulación reactiva debido al Teorema de Kelvin_Heltmholtz) o bien: b.- por un perfil simétrico con una pequeña incidencia, lo que produce un mecanismo similar, c.- o bien ambas cosas a la vez, es decir perfil asimétrico y ángulo de incidencia no nulo. Ejemplo 1: - En un experimento en túnel de viento con una esfera, se desea reproducir el fenómeno de separación de capa límite laminar. El túnel puede impulsar aire a velocidades variables hasta 120 m/s. Se pregunta cual debería ser el diámetro de la esfera, y qué fuerza de resistencia puede esperarse al verificarse el fenómeno de separación. Datos de aplicación: Densidad del aire a 15°C= 1,292 kg/m3 Viscosidad del aire a 15°C= 1,76 . 10-5 N.seg/m2

FUNDAMENTOS DE MECANICA DE FLUIDOS _ Ing.Jorge Rosasco.
Mod 10 Fuerzas sobre cuerpos sumergidos en una corriente. (versión preliminar)
15
Resolución : La separación tiene lugar, según el gráfico Fig.10.3_1, a 5105.2 ⋅ Re Suponiendo que regulamos la velocidad. del viento en 100 m/s
mmdDdV36105,2
1076.110022.1Re 5
5=→⋅=
⋅⋅⋅
==−μ
ρ
b)Fuerza existente:
=⋅= SUCR D )21( 2ρ
de la tabla, 4,0=DC para 5105.2Re ⋅= , entonces,
NR 62,24036,0)10022,15,0(4,0
22 =
⋅⋅⋅⋅=π
c) Potencia. Instalada: Si tomamos por ejemplo mm90=φ como valor de diámetro para la boquilla salida de aire del experimento, dado que es lo correspondiente a dejar un diámetro a cada lado de la esfera para evitar los efectos de compresibilidad, aproximadamente. De la aplicación de la ecuación de energía:
HPwattUVAUMW 5.970901205,0120409,029,15,0][5,0 2
222 ==⋅⋅⋅
⋅⋅=Δ⋅⋅=Δ⋅⋅=
•• πρ
sería la potencia necesaria que requiere la instalación. []

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing.Jorge Rosasco
Mod.11. Medición de Variables (versión preliminar)
1
11 MEDICIÓN DE VARIABLES FUNDAMENTALES.
11.1 Flujos interiores y exteriores: Ya dijimos que atendiendo a los flujos desarrollados, ellos se clasifican en “exteriores” e “interiores”. Los flujos exteriores son los flujos alrededor de cuerpos tales como automóviles, edificios, perfiles de ala, superficies sumergidas de navíos y en general flujos en torno a objetos, bañados por una interfase fluida de líquido o gas, típicamente agua o aire. Para el análisis se supone que no hay contornos en general para la masa fluida, que baña al cuerpo y que el mismo se desenvuelve en un entorno fluido infinito en relación relativa al tamaño del objeto en estudio. Por otra parte, los flujos interiores, son aquellos en que el movimiento del fluido está limitado por contornos próximos, por ejemplo, la conducción por tuberías, canales, conductos y toberas. Éstos últimos son de especial interés a los ingenieros ambientales, e industriales, mientras que los exteriores son el dominio de los ingenieros aeronáuticos y navales. En el caso de los primeros, es importante la medición de velocidades y presiones en torno a objetos bañados por ejemplo de la corriente libre; en el segundo, la medición del caudal en las tuberías, conductos, canales vertederos, aliviaderos y la distribuciones de la velocidad confibada a partir de la cual el establecimiento de la velocidad media puede obtenerse fácilmente a través de la ecuación de continuidad. Comenzaremos por ésta última. 11.2 Medición del caudal en tuberías: Entre los métodos tradicionales para medir el caudal en tuberías, están los dispositivos que miden el caudal a través de la caída de presión que se produce cuando un fluido pasa por un “tubo Venturi” que básicamente es un dispositivo que produce un estrechamiento con posterior ensanchamiento del conducto a su diámetro normal y con las salidas adecuadas para la medición de la presión estática interna en dos posiciones típicas una antes del estrechamiento y otra en la garganta, como se indica en la figura siguiente 11.2_1
Fig.11.2._1

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing.Jorge Rosasco
Mod.11. Medición de Variables (versión preliminar)
2
La relaciones de forma óptima para el Venturi en primera aproximación son del orden de: Diámetro Interior del tubo / Diámetro de garganta = 3 / 1 Longitud Tramo Divergente / Longitud Tramo Convergente = 9 / 1 Angulo del tramo divergente 5° a 9° Con estas dimensiones se obtienen pérdidas de carga o presión interior de conducción bajas, típicamente de un 1, 0 a un 1,5%.es decir el proceso de medición si bien produce una pédida de energía en el sistema, esta es pequeña. A partir de la ecuación de Bernuolli para la línea de corriente central, en la cual hemos asumido que no se extrae ni se cede trabajo y calor, y que no aumenta la energía interna del fluido, al menos en el tramo entre los puntos 1 y.2 queda:
ctezgVp
zgVp
=++=++ 2
222
1
211
22 ρρ
Dividiendo en ambos miembros por g (la aceleración de la gravedad) y considerando que ρ.g = γ (peso especifico), queda reemplazando la Ecuación de Bernuolli expresada en metros:
2
222
1
211
22z
gVp
zg
Vp++=++
γγ
Como el nivel en la línea de corriente central es cte., z1= z2 entonces:
gVVpp
2
21
2221 −
=−γ
[11.2.1]
la ecuación de continuidad dentro del Venturi nos indica que en la tubería el caudal es constante:
22211121 AVAVQQ ρρ =→= como asumimos fluido incompresible, cosa que es válida para agua en conducción general y aire a velocidades inferiores a lo indicado por M < 0.3:
y 2
21
1221121 AQV
AQVQAVAV ==→==→== ρρρ
Reemplazando en [11.2.1],obtenemos el denominado Caudal Teórico:
2 21 2 1 2
1 22 2 2 22 1 1 2
2 1 1 22( ) ( ) ( )2
p p A AQ gQ p pg A A A Aγ γ
−= − → = −
−
2 21 2
1 2 2 21 2
2 ( ) ( )A AgQ p pA Aγ
= −−
[11.2.2]
Como vimos al estudiar la Ecuación de Continuidad, cuando hay una disminución de presión entre dos puntos se produce un aumento de velocidad y recíprocamente, fenómeno que utilizamos para medir el caudal. En algunas aplicaciones, los manómetros en 1 y 2 se reemplazan por un tubo en U, conteniendo mercurio.

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing.Jorge Rosasco
Mod.11. Medición de Variables (versión preliminar)
3
Como la presión en 1 es mayor que en 2, el mercurio desciende en la columna 1 y asciende en la 2, creando un desnivel h Considerando la diferencia de fluidos en el desnivel h, se establece una ecuación de equilibrio para los puntos 1´ y 2´ , en referencia a la Fig. 11.2._2.
Fig. 11.2_2
1 2 1 2 ( )p h p h p p h mMγ γ γ γ+ = + → − = −
Lo que reemplazando en el resultado [11.2.2] queda para la medición de caudal:
2 21 2
2 21 2
2 ( 1) ( )A AmQ g hA A
γγ
= −− [11.2.3]
Problema 1 (propuesto): En el manómetro de vidrio instalado según las condiciones de la figura [11.2._2],se lee un desnivel de 0.8 cm. El líquido que circula tiene un peso específico 3/8,0 dmKgF=γ y las secciones A1 (interior del tubo) y A2 (sección en la garganta) son de 12 cm2 y 6 cm2 respectivamente. Calcular el caudal que circula en la tubería, y la velocidad media a la entrada del tubo Venturi. 11.3.- Mediciones de Velocidad en Flujos Abiertos: Vimos en el ejemplo anterior que en conductos cerrado tales como tuberías, conociendo el caudal, es simple el cálculo de la velocidad media en la tubería, ya que Q VA Vρ= → . Sin embargo, éste no es el caso de los flujos abiertos, donde el concepto de caudal no es aplicable, pero sí es necesaria la medición de velocidad de la corriente libre. Para este fin se usa el tubo “Pitot-Darcy”1 que con pocas modificaciones se usa actualmente, y cuyo esquema se da en la Fig. 11.3_1 siguiente:
1 Henri Pitot creó el tubo en los primeros 1700, y fue modificado a su forma actual a mediados de 1800 por Henri Darcy,

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing.Jorge Rosasco
Mod.11. Medición de Variables (versión preliminar)
4
Fig.11.3_1
La sonda posee una rama dinámica (que es un tubo abierto de pequeño diámetro, en la figura dibujado con una línea) expuesta a la entrada de la corriente a velocidad, (punto B) esta rama horizontal se denomina rama dinámica, luego el tubo se curva en “U” y su otra abertura queda expuesta al ambiente estático del interior de la sonda que contiene el mismo fluido que el exterior y está conectado con él por un orificio, esta parte se denomina rama estática y es la que hace el sensado de la presión estática del entorno en el remanso creado por el cuerpo de la sonda. La presión estática del entorno ingresa por el pequeño orificio superior a la presión ambiente A y se remansa en el cuerpo interior de la sonda Pitot. El punto A indicado delante la sonda, representa la condición de la corriente, muy lejos de la entrada de la misma corriente arriba, en presión y velocidad , la presión es la estática, estas presión en A a veces se denomina, presión de de infinito p∞ . La presión en la entrada de la rama dinámica (punto B), impulsa la columna de mercurio hacia abajo hasta
el punto C, creando un desnivel h. Para la línea de corriente ______
ABC , el punto C está a la presión de estancamiento de flujo, este estancamiento se traslada al extremo de la sonda en B, tomando Bernuolli para esta línea de corriente entre los puntoa A y B en remanso, será:
2 2
2 2A A B B
A Bp V p Vz z
g gγ γ+ + = + +
como:
0z zA BVB
==
queda operando:
2
2 2 21 1 1 2 2 2 2
p p VB A p p V p V p VatB Agρ ρ ρ
γ γ= + → = + = + = +∞ [13.3.1]
Siendo para este caso ρ la densidad del fluido a sensar.. Si estamos usando el tubo en un avión la densidad será la del aire en las condiciones de altitud y temperatura correspondientes.

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing.Jorge Rosasco
Mod.11. Medición de Variables (versión preliminar)
5
Por otra parte, dentro del tubo en “U”, la comparación de las presiones en C y D, que son iguales, ya que en esos puntos hay equilibrio, nos da, comparando, los segmentos 1 y 2, enrasados por h, uno con mercurio y otro con aire:
212
p p p VC B at ap p p p ghBC D at m
ρ
ρ
= = +
= = = +
Restando la segunda de la primera, resulta:
21 1 20 0 2 2
V g h V g ha m a mρ ρ ρ ρ= + − → =
m2a
V g h ρρ
= [13.3.2]
En los modernos tubos Pitot, que se usan en aeronaves, por supuesto no se usa tubo con mercurio, pB y pA se miden separadamente a través de captores o sensores eléctricos de presión y se procesa la fórmula convertida en señales eléctricas a distancia, la ecuación utilizada es a partir de la [13.3.1]:
2 ( )V p pB Aaρ= −
La diferencia de presiones obtenida por métodos electrónicos es procesada en una pequeña computadora que también introduce el dato correcto de la densidad del aire corregida por temperatura y altitud en cada instante. Problema 2 Calcular la velocidad de un avión, suponiendo que usamos un dispositivo básico Pilot-Darcy, en el que el desnivel de Mercurio es de 8 cm; sabiendo que el avión vuela a 1500m de altura tomando como valores de peso específico del Mercurio 3/6,13 dmKgFM =γ y para el aire 3/29,1 mKgFA =γ a nivel del mar, y 15°C. Resolución:
Tomando: mar del nivel a densidadaire del actual densidad
00
===γγ
ρρϑ
y la fórmula empírica: HH
+−
=132132ϑ con H: altura (en miles de pies)
En nuestro caso, h = 1500 m H = 4,935 υ = 0,927 en la altura solicitada 3206,12 mKgF
=γ
Aplicando la fórmula (3.2): )206.1600.13(08,081,92)(2
2⋅⋅⋅==
γγ MghV

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing.Jorge Rosasco
Mod.11. Medición de Variables (versión preliminar)
6
Por lo tanto: V = 133 m/seg = 478.8 km/h; como 1kts (nudo) = 1,853 km/h V=258 kts. Esta velocidad corregida por densidad se denomina velocidad verdadera o TAS (True Air Speed). Las aeronaves miden esta velocidad en sus instrumentos, que por convención se mide en: nudos = millas marinas / hora 11.4.-Resolución de problemas aplicando la fórmula Torricelli: La fórmula de Torricelli, permite calcular el derrame a través de un orificio de un fluido con un desnivel h simplemente aplicando la ecuación de Bernuolli, al derrame de un fluido ideal, por lo cual la misma puede ser aplicada entre dos puntos cualquiera del campo de fluido, en este caso un punto de la superficie libre y el orificio de salida. La ecuación de la velocidad de salida que resulta es:
2V gh= es equivalente a la de caída libre de un objeto, desde una altura h. Damos aquí un ejemplo de aplicación de la fórmula de Torricelli, para el caso más complicado que se puede presentar, esto es, se desea calcular la velocidad de salida por un orificio puntual en el fondo de un recipiente en el cual hay tres fluidos inmiscibles con alturas respectivas de columna h, h’ y h’’ y densidades γ, γ’ y γ’’ y además considerando que es un recipiente cerrado y con presión interior pi en un recipiente a presión, o sea fluidos inmiscibles, recipiente cerrado, presión interior ati pp ≠ . Fig. 11.4_1 Resolución: Aplicamos la ecuación de Bernuolli entre dos puntos de un segmento horizontal en el cual uno de los puntos corresponde a la partícula del punto 2 sometida a velocidad V y la del punto 1 (alejado del orificio) en reposo; la línea está ubicada en el nivel genérico z = 0 y sumergida en el líquido de peso específico γ . Aplicando Bernuolli a esta línea:
2 21 1 2 2
1 22 2p V p Vz z
g gγ γ+ + = + +

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing.Jorge Rosasco
Mod.11. Medición de Variables (versión preliminar)
7
con: 0 z 1 1 2 2V z p pat= = =
reemplazando:
21
2
pp Vatgγ γ
= +
y como: 1 ( ´ ´ ´´ ´´ )p h h h piγ γ γ= + + +
reemplazando:
2 2 ´ ´ ´́ ´́ ( )´ ´́ ( ) ´ ( ) ´́2 2
h h h p p p pV Vi ati at h h hg g
γ γ γ γ γγ γ γ γ γ
+ + + −⎧ ⎫= + → + + + =⎨ ⎬
⎩ ⎭
al paréntesis llave lo llamamos altura equivalente He entonces:
2 ( )p pi atV g He γ
−= +
Si p pati = y hay un solo líquido He = h 2V g h= , o sea volvemos a la expresión original. Los resultados de los problemas de velocidad de salida por orificios aplicando el teorema de Torricelli son bastante precisos para salidas con formas de bordes de agujero redondeados. Para orificios que no tengan formas fluidodinámicas, (o bordes redondeados), el chorro sufre una contracción al salir del depósito, formándose una “vena contraída”. El área de dicha sección se determina experimentalmente, el coeficiente de contracción CC se utiliza con este propósito y se define con la expresión CC=AC / A. Este coeficiente depende de :las siguientes variables:
o La forma de los bordes o El área seccional menor del orificio. o La altura de nivel del líquido.
Fig. 11.4_2

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing.Jorge Rosasco
Mod.11. Medición de Variables (versión preliminar)
8
Los coeficientes de contracción, varían desde CC = 0,60 para bordes agudos, a 0,98 para las salida fluido-dinámicas. Si también tomamos en cuenta el coeficiente de fricción del orificio: CV , el caudal de desagote es:
2 2V C dq C C g h A C g h A= ⋅ = ⋅ A Cd que es el coeficiente combinado, se lo denomina coeficiente de descarga C C Ccd v= y es el que se encuentra en tablas. El coeficiente se indica con d (minúscula) para que no se condubda con el coeficiente de arrastre que se indica con D (mayúscula). []
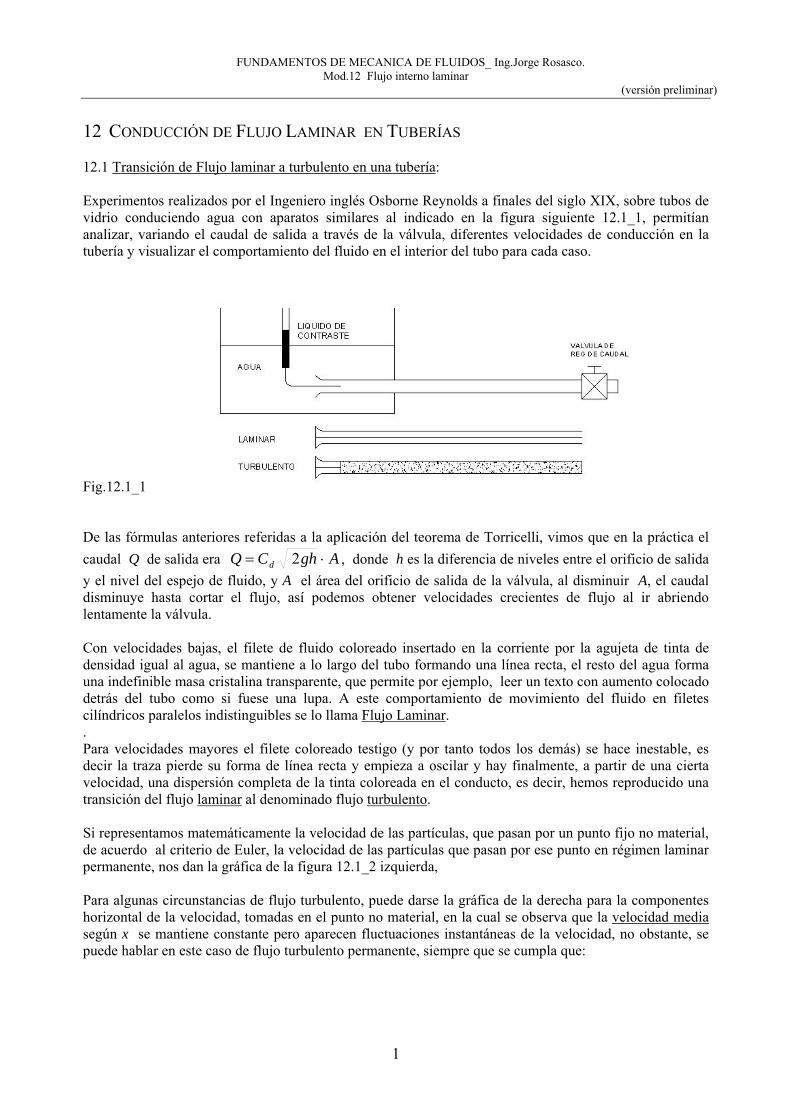
FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
Mod.12 Flujo interno laminar (versión preliminar)
1
12 CONDUCCIÓN DE FLUJO LAMINAR EN TUBERÍAS 12.1 Transición de Flujo laminar a turbulento en una tubería: Experimentos realizados por el Ingeniero inglés Osborne Reynolds a finales del siglo XIX, sobre tubos de vidrio conduciendo agua con aparatos similares al indicado en la figura siguiente 12.1_1, permitían analizar, variando el caudal de salida a través de la válvula, diferentes velocidades de conducción en la tubería y visualizar el comportamiento del fluido en el interior del tubo para cada caso. Fig.12.1_1 De las fórmulas anteriores referidas a la aplicación del teorema de Torricelli, vimos que en la práctica el caudal Q de salida era AghCQ d ⋅= 2 , donde h es la diferencia de niveles entre el orificio de salida y el nivel del espejo de fluido, y A el área del orificio de salida de la válvula, al disminuir A, el caudal disminuye hasta cortar el flujo, así podemos obtener velocidades crecientes de flujo al ir abriendo lentamente la válvula. Con velocidades bajas, el filete de fluido coloreado insertado en la corriente por la agujeta de tinta de densidad igual al agua, se mantiene a lo largo del tubo formando una línea recta, el resto del agua forma una indefinible masa cristalina transparente, que permite por ejemplo, leer un texto con aumento colocado detrás del tubo como si fuese una lupa. A este comportamiento de movimiento del fluido en filetes cilíndricos paralelos indistinguibles se lo llama Flujo Laminar. . Para velocidades mayores el filete coloreado testigo (y por tanto todos los demás) se hace inestable, es decir la traza pierde su forma de línea recta y empieza a oscilar y hay finalmente, a partir de una cierta velocidad, una dispersión completa de la tinta coloreada en el conducto, es decir, hemos reproducido una transición del flujo laminar al denominado flujo turbulento. Si representamos matemáticamente la velocidad de las partículas, que pasan por un punto fijo no material, de acuerdo al criterio de Euler, la velocidad de las partículas que pasan por ese punto en régimen laminar permanente, nos dan la gráfica de la figura 12.1_2 izquierda, Para algunas circunstancias de flujo turbulento, puede darse la gráfica de la derecha para la componentes horizontal de la velocidad, tomadas en el punto no material, en la cual se observa que la velocidad media según x se mantiene constante pero aparecen fluctuaciones instantáneas de la velocidad, no obstante, se puede hablar en este caso de flujo turbulento permanente, siempre que se cumpla que:

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
Mod.12 Flujo interno laminar (versión preliminar)
2
2
1
___
2 1
1 t
tV Vdt
t t=
− ∫
Fig.12.1_2 Los experimentos de Reynolds estuvieron basados en variar la velocidad en tubos de vidrio de diámetro constante, uno a la vez, para un dado fluido a la vez, es decir, la obtención de diferentes valores del número adimensional que ya hemos definido como Número de Reynolds, cambiando la variable V para cada uno de ellos:
μρ DV
Re =
donde D era el diámetro interior del tubo bajo prueba. Dependiendo de las condiciones de cómo se realiza el experimento, la transición laminar – turbulento se produce en un rango 2.300 < Re < 4.000 dependiendo fundamentalmente de la isolación del experimento a las vibraciones exteriores y la calidad del tubo. Para los casos prácticos, la transición en flujos interiores y para tuberías comerciales se toma en Re = 2.300. Para flujos abiertos, en placas planas como vimos, las transiciones se producen en valores de otra magnitud, del orden de Re= 5. 10 5, y dependen de la variable dimensional de la posición sobre la placa. Para objeto el Re esta basado en un diámetro o una longitud característica. .Los rangos completos de los números de Re, para los flujos laminar turbulento, y flujos de Stokes de Re extremadamente bajos pueden verse en las siguiente tabla:

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
Mod.12 Flujo interno laminar (versión preliminar)
3
12.2.- Análisis de Flujo Laminar Unidimensional: El análisis de flujos reales internos, impone la consideración de la viscosidad. Como ya se dijo, la viscosidad es la propiedad del fluido que introduce las tensiones de corte, y es la causa de la irreversibilidad en los procesos produciendo aumento de energía interna y eventualmente pérdidas de calor hacia el medio ambiente. 12.2.1 Flujo laminar incompresible entre placas paralelas: El modelo de la figura siguiente Fig.12.2_1,es un modelo de flujo en 2D, se ha considerado un flujo incompresible, permanente, viscoso y de régimen laminar la placa superior se mueve paralela a la superficie libre y a la dirección del flujo. El flujo se toma uniaxial, es decir, el ancho del dispositivo se considera mucho mayor al resto de las dimensiones, todos las líneas de corriente y sus velocidades en las cotas y tomada respecto de la base, se repiten iguales para toda la profundidad z., y no se consideran los efectos del borde (los valores significativos del experimento, se toman lejos de los bordes laterales del dispositivo) y por esa razón el flujo en cada plano se considera 2D. También consideramos que el fluido tiene una componente gravitatoria o fuerza másica no despreciable en la dirección vertical, lo que da una componente en la dirección de la longitud x , y consideramos también una variación de presión de impulsión entre las caras laterales, para algunos casos particulares haremos igual a cero esta diferencia de presión. El análisis se hace considerando una partícula libre de fluido en movimiento, el flujo se considera: - incompresible. - permanente. - flujo real. a una cota fija desde la base, la partícula tendrá una velocidad constante, (en un perfil no definido todavía, pero constante para cada línea de corriente por su carácter de permanente) y se considera que habrá un gradiente de velocidades según y pero no según x la partícula magnificada dibujada en el seno del flujo, se ha tomado por debajo del plano central, la partícula tiene dimensiones ( 1×× yx δδ ) es decir la consideramos de profundidad unitaria, (por supuesto las escala con que se dibujó la partícula ha sido muy ampliada). El análisis de las fuerzas que sobre ella ejercen las partículas que se deslizan por encima a mayor velocidad por estar más lejos del plano inferior, conduce a observar una fuerza de fricción en la cara superior de la partícula de control hacia la derecha, asimismo, nuestra partícula testigo trata de ser ralentizada por las que están en contacto sobre su cara inferior, que son más lentas, y también aparecen fuerzas no compensadas de presión sobre las caras laterales. Para hacer el caso lo más general posible, se considera que la lámina que cierra el conducto en la parte superior se mueve con velocidad constante U en la dirección [+ x]. , y que el gradiente de presiones aumenta corriente abajo, el signo del gradiente debe ser tenido en cuenta el las ecuaciones finales a aplicar, en la mayoría de los problemas reales la presión disminuye corriente abajo, en estos casos el gradiente debe ingresarse a las fórmulas con signo negativo. La ecuación de movimiento a partir del balance de fuerzas, una vez que el flujo permanente se encuentre ya bien establecido, para el elemento en la dirección x es:

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
Mod.12 Flujo interno laminar (versión preliminar)
4
( ) ( ) 0dp dy y xp dy p d dx d d d x d senydx dy
ττ τ γ θ− + − + + + =
si dividimos en ambos miembros por el volumen del elemento y simplificamos queda:
0=++− θγτ sendyd
xddp
Fig.12.2_1
Cuando nos desplazamos un dx hacia la región negativa del eje x ,[-dx], la altura aumenta un dh,
podemos establecer entonces la relación: : →−=dxdhsenθ
dyhpdxddhp
dxd
dyd )] ([ )( γτγτ
+=→+=
La expresión del segundo término entre corchetes, es una función de x y una constante para la integración según y, por lo que queda integrando:
1[ ( )]d p h y Cdx
τ γ= + + [12.2.1]
Como asumimos el comportamiento como flujo laminar, sustituimos de acuerdo a la ley de viscosidad de Newton para fluidos:
dyduμτ =
El signo positivo de la ecuación surge del siguiente análisis, para el desarrollo de la ecuación de equilibrio de fuerza se consideró un desplazamiento de la partícula en la dirección de 1 a 2, a pesar de un gradiente adverso y opuesto de la presión de 1 a 2 ya que se supuso p2 > p1 y un gradiente de velocidades creciente desde la placa inferior hasta la línea central , región donde está ubicada la partícula, por lo tanto cuando y crece, u también crece y la ecuación se define con signo positivo:

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
Mod.12 Flujo interno laminar (versión preliminar)
5
Entonces reemplazando y despejando el gradiente, queda:
11 [ ( )] Cdu d p h ydy dx
γμ μ
= + + [12.2.1b]
que integrando respecto de y nuevamente, nos da el perfil de las distintas velocidades entre la base y la placa superior:
12
1 2[ ( ) ]2
Cdu p h y y Cy dxγ
μ μ= + + + [12.2.2]
C1 y C2 son constantes de integración que pueden calcularse a partir de las condiciones de contorno siguientes: Para y = 0 u = 0 Para y = a u = U Por lo tanto: C2 = 0 ; quedando para la segunda:
11 2[ ( )]2
Cd p h a a Udx
γμ μ
+ + = →
ahpdxd
aUC
)(211 γμμ
+−=
reemplazando los valores obtenidos de las constantes en [12.2.2] queda:
1 2[ ( )] ( )2
d U yu p h y a yy dx aγ
μ= + − + [12.2.3]
Si el esquema de la figura 12.2_1, el dispositivo estuviera horizontal, no habrá variación de altura, si consideramos además un caso en que no hay gradiente de presión según x y solamente consideramos el movimiento de la placa superior, quedaría:
( ) 0 d U yp h uydx aγ+ = → =
Fig.12.2_2

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
Mod.12 Flujo interno laminar (versión preliminar)
6
que es la distribución de velocidades para el experimento de Newton de viscosidad, con una superficie fija y otra móvil. 12.2.2 Flujo laminar incompresible en un canal abierto. Partimos de la ecuación [12.2.1], deducida anteriormente, que reproducimos nuevamente aquí:
1[ ( )]d p h y Cdx
τ γ= + + [12.2.1]
Al considerar un flujo laminar abierto a la atmósfera, como puede verse en la Fig.12.2_3, se cumplirán las siguientes condiciones de borde:
ayxp
=≈=∂∂
en 0y 0 τ
Fig.12.2_3 con lo cual reemplazando en la [12.2.1] anterior, podemos obtener el nuevo valor de la constante C 1 para este caso particular:
0 ( ) ( ) sin1 1d dhh a C C a adx dx
γ γ γ θ= + → = − =
Aplicando la ley de viscosidad de Newton τμ
μτ 1)()( =∂∂
→∂∂
=yV
yV con las mismas consideraciones
anteriores y reemplazando la nueva constante en la expresión ya obtenida anteriormente, [12.2.1b]:
11 [ ( )] Cdu d p h ydy dx
γμ μ
= + + →
1 ( ) sin ( sin ) sindu d a ah y ydy dx
γ γ γγ θ θ θμ μ μ μ⎡ ⎤= + = − +⎢ ⎥⎣ ⎦
finalmente
2 sin ´ sin 22au y y Cy
γ γθ θμ μ
= − + +
para obtener la constante C2 aplicamos la condición de borde uy = 0 en y = 0 de donde resulta C2 = 0
entonces la distribución de velocidad estará dada por:

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
Mod.12 Flujo interno laminar (versión preliminar)
7
2 sin sin2
au y yyγ γθ θμ μ
= − + [12.2.4]
y la velocidad máxima ocurrirá en superficie siendo:
2sinmax 2
au γ θμ
=
para calcular la velocidad media: ___ __
0 0
21 sin3
a a au a u dy u u dyy yaγ θμ
= → = =∫ ∫
Sio b es el ancho del canal, el caudal que circulará es:
___ 3sin
3a bQ u a b γ θμ
= =
una vez alcanzada la condición de flujo permanente, la lengua de fluido laminar es impulsada solamente por las fuerzas másicas ya que en este caso por ser la superficie libre no hay gradiente de presión, las tensiones tangenciales a través del rozamiento mantienen la condición de velocidad constante para cada lámina. Ejemplo 1: En el esquema de la figura siguiente, una placa móvil de gran longitud en la dirección del canal, se mueve sobre la base fija según se indica en la figura 12.2_4 sobre una interfase fluida ente ambas de 5 mm de espesor, las características físicas del fluido son:
80,0=μ poise 3/ 5,93 mUTM=ρ
Determinar: La distribución de velocidades, el caudal. y la tensión de corte sobre la placa móvil. Fig.12.2_4

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
Mod.12 Flujo interno laminar (versión preliminar)
8
Resolución: a.- la distribución de velocidades, se puede calcular tomando como referencia el punto P1 y para el una altura de 0 metros y para el punto P2 una altura de 3 metros. En el punto superior P2, calculamos ) ( hp γ+ :
234
2
323
24
2
24
2
750,1732,917105,1) (
2,91781,95,93
105,1105,1
mKgF
mm
KgFhp
mKgF
segm
mUTMg
mKgF
mcm
cmKgF
p
=⋅+×=+
=⋅==
×=⋅=
γ
ργ
224
110000101) (
mKgF
mKgFhp ==+ γ
Con los datos anteriores
31825231775010000) () (
mKgF
dxhpd
xhp
−=−
=+
=Δ+Δ γγ
también como datos :tenemos:
segmU
ma
1
105 3
−=
⋅= −
Los cuales reemplazados en la ecuación (12.2.3) queda:
) ( )] ([21 2yyahp
dxd
ayUu −+−= γ
μ
)005,0()98/8.02(
182510.5
23 yyyu −+−=
−
En la cual se hizo la conversión de poise a ).( 2msegKgF : como poise es la unidad “cgs” de viscosidad:
1 poise= 98
8,0)(00010)(000980
1.1 2
2
2 =⋅⋅mcm
dynKgF
cmsegdyn
).( 2msegKgF
Operando sobre el resultado final de “u” queda para la ecuación de distribución de velocidades:
2780111359 yyu −= La velocidad máxima se presenta donde se obtienen los máximos y mínimos de la función u (y), o sea para

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
Mod.12 Flujo interno laminar (versión preliminar)
9
0=dydu
mmmyy 6,11060,1)7801112(/359 07801112259 3 =⋅=⋅=→=⋅− −
Las velocidades mínimas, es decir donde el líquido se estagniza o detiene las obtenemos para: Y = 0 u = 0
y = 5mm segmu 1795,2795,1)005,0(111800005,0359 2 −=−=⋅−⋅=
y la velocidad máxima:
y =5 mm segmu 29,0)0016,0(1118000016,0359 2 =⋅−⋅=
el perfil de velocidades sería: Fig.12.2_5 b.-Cálculo del caudal: Como el diferencial de área es 1.dydA =
3
0) (
121
2ahp
dldVaudyQ
aγ
μ+−== ∫ ][
2
segm
Pero la unidad mseg
mmsegmm
segm 1 ][][
322
=⋅⋅
= es decir representa caudal por unidad de dimensión segun la
profundidad de la placa. Reemplazando valores mseg
mQ 1 ][1017,0 3
3−⋅−= da en un sentido negativo, o sea
hacia arriba, es decir que es mayor el flujo ascendente que el descendente.

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
Mod.12 Flujo interno laminar (versión preliminar)
10
c.- Cálculo de la tensión de corte: Para calcular la tensión de corte que en definitiva nos permitiría calcular la fuerza necesaria para mover la placa corriente arriba, calculamos primero (du/dy) o sea el gradiente de velocidad para esa posición:
22 19,6 1.. )759( )98
8,0(005.
)(m
KgFsegm
segKgFydy
du−=−=
=
Como da negativo, la tensión para mover la placa debe ser en sentido negativo o sea opuesto al movimiento de la placa. Observe que para calcular la fuerza total deberíamos multiplicar esta tensión de corte por el área de la placa y agregar la componente de peso de la placa según la dirección x. 12.3 Otros casos particulares para flujos laminares. El alumno debería ahora estar en condiciones de responder a las siguientes preguntas: a.- ¿Qué pasa si V = 0, o sea si tenemos dos superficies fijas ? ¿Cómo es el patrón de velocidades en este caso? b.- ¿Qué pasa si V 0≠ pero, en desarrollo horizontal? Ayuda: Observe que en este caso d h=0 h=0 12.4.- Análisis de Flujo Laminar en Tuberías Cilíndricas. En general llamamos tubo, o tubería a una conducción cerrada de sección circular, la sección circular es óptima en su relación superficie mínima para volumen máximo trasportado por unidad de longitud y resistencia a la presión interior respecto al peso, y llamamos ducto cuando es una conducción cerrada con otro tipo de sección, por ejemplo rectangular, que se emplean para conducir fluidos normalmente aire a baja presión, (aire acondicionado). Consideremos la condición de flujo incompresible, permanente y viscoso (necesarias para establecer flujo laminar) desplazándose por un tubo de sección circular inclinado, de radio interior r = a , y con una diferencia de presión exterior, como se muestra en la Fig. 12_4.1 siguiente, que es la condición más general posible. Sobre el elemento másico de fluido de forma cilíndrica co lineal con el eje central,, concéntrico con el tubo , tomamos todas las fuerzas de campo y superficiales que nos aparecen., aplicando la ecuación de movimiento en la dirección longitudinal x con aceleración nula tenemos
0Fx =∑ (Movimiento Uniforme)
2 22 ( ) 2 0p r p dp r rdx r dx senπ π τ π γ π θ− + − + = [12.4.1]
operando y tomando en cuenta que θ sendldh
=− ; queda:
2 22 0dp r rdx r dhπ τ π γ π− − − =

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
Mod.12 Flujo interno laminar (versión preliminar)
11
despejando el valor de la tensión tangencial:
1 [ ]2 2 2
dp r r dh dr p xdx dx dx
τ γ γ= − − = − + [12.4.2]
hemos supuesto que por la tubería circula un flujo Newtoniano, y que el signo de la tensión tangencial fue colocado correctamente, en el supuesto que la partícula se desplaza corriente abajo, sin embargo a diferencia del caso de placa plana, ahora el eje x está tomado sobre el eje central y cuando r es creciente, el gradiente es decreciente, es decir cuando r aumenta desde el eje central a la pared superior, la velocidad disminuye, por lo cual la expresión de vinculación de Newton debemos tomarla en este caso con signo negativo:
( )dudr
τ μ= −
Fig.12.4_1
Reemplazando en la [12.4.2]
[ ]22
[ ]4
du r d p hdr dx
r du p h Cr dx
γμ
γμ
= + →
= + +
Aplicando las condiciones de borde: Si r = a → u = 0
2[ ]
4a dC p h
dxγ
μ= − +
quedando para la expresión de la distribución de velocidad:

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
Mod.12 Flujo interno laminar (versión preliminar)
12
1 2 2[ ][ ]
4du p h r ar dx
γμ
= + − [12.4.3]
que también podemos escribir:
2 2[ ] [1 ]24
a d ru p hr dx aγ
μ= − + − [12.4.3b]
y para la velocidad máxima, que se da en r = 0:
2
[ ]4mxa du p h
dxγ
μ= − + [12.4.4]
y para tubo horizontal:
2 2
.
( ) ( )4
h cter a pur xμ
= →
− Δ=
Δ
siendo el valor de la velocidad máxima en este caso:
2
( )4a pumx xμ
Δ= −
Δ
Si p2 > p1, el flujo y la velocidad máxima tienen sentido hacia las x negativas, y recíprocamente, si p1 > p2 ( / )p xΔ Δ es el gradiente de la presión entre los extremos del tubo entre los cuales estudiamos el perfil de velocidades, La representación de la velocidad u en función del radio r como se ve en la ecuación es claramente una parábola para cada sección longitudinal y un “paraboloide de revolución” para la distribución tridimensional de velocidades en el tubo. Fig. 12.4_2
FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
Mod.12 Flujo interno laminar (versión preliminar)
13
Como la distribución de velocidades para cada sección radial es una parábola, es fácil demostrar que la velocidad media es exactamente la mitad de la velocidad máxima o sea: ___ 2
( )8a dV p h
dxγ
μ= − +
y, por lo tanto, el caudal es:
____ 2Q V aπ= ⋅ o sea:
4( )
8a dQ p h
dxπ γμ
= − + [12.4.5]
Como 4
( )2 128D D da Q p h
dxπ γ
μ= → = +
12.5.- Caída de presión para flujo laminar en tubos, fórmula de Hagen-Poiseuille: A partir de la expresión[12.4.5] podemos obtener el caudal para tubo horizontal:
4( )
128D pQ
xπ
μΔ
=Δ
[12.5.1]
En la anterior a menudo se reemplaza la cantidad Δx por la longitud del tramo de tubo considerado L., siendo L la distancia entre la ubicación de manómetros, entonces queda:
4 128 4128
D P LQQ PL D
π μμ π
Δ= → Δ = [12.5.2]
Por lo tanto, vemos que la caída de presión (energía potencial de presión) es directamente proporcional a la viscosidad, a la longitud y al caudal, e inversamente proporcional a la cuarta potencia del diámetro. Observe que la rugosidad del tubo no interviene en la ecuación, porque simplemente las laminas están casi detenidas en las proximidades de la pared y las partículas “atascadas” suavizan el deslizamiento de las capas contiguas más separadas. Esta ecuación [12.5.1] y la [12.5.2] son conocidas como ecuaciones Hagen Porseuille, y fueron obtenidas entre 1839 y 1840. Las ecuaciones son válidas para flujo ya establecido en cañería (o sea flujo permanente).

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
Mod.12 Flujo interno laminar (versión preliminar)
14
12.5.- Longitud de entrada o transición. Para el tramo inicial de la cañería, si proviene de un depósito con una entrada abocinada, la velocidad es casi uniforme al valor de la velocidad media. Después, debido a la ecuación de continuidad, la velocidad aumenta sobre la línea central y disminuye hacia los bordes, hasta que quede establecido completamente el perfil parabólico.
Fig.12.5_1
Cuando estudiamos las propiedades de la capa límite, vimos que dentro del tubo el espesor de la misma va aumentando desde la entrada para cada sección longitudinal y en poco trecho la capa invade todo el volumen del tubo desde la superficie interior del tubo a velocidad cero, hasta la línea central de velocidad máxima. Se puede establecer analíticamente que la longitud de transición de la capa límite, desde la entrada y hasta que ocupa todo el interior del tubo es:
0.058 ReTL D= este valor está de acuerdo a las observaciones experimentales. Podremos estar seguros del establecimiento de este patrón de flujo laminar como ya dijimos, si el número de Reynolds Re es inferior a 2.300, es decir, si se cumple:
___
Re 2.300V Dρμ
= <
lo que indica flujo laminar desarrollado. Para flujos turbulentos, la longitud de transición resulta más corta, y se puede aproximar por la ecuación definida en forma empírica siguiente:
1 / 41.359 ReTL D=

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
Mod.12 Flujo interno laminar (versión preliminar)
15
Ejemplo 2 Determinar las características del flujo en el tubo representado en la Fig.12.4_3 siguiente, asumiendo que el flujo sea laminar, siendo:
poisesmKgF
40,0/800 3
==
μγ
Calcular el caudal en el [litros / min] y el n° Re del flujo. Fig.12.4_3 En la posición 1 (origen de coordenadas)
1 241,5 10
51
KgFpm
h m
= ⋅
=
En la posición 2:
2 2 242 10 20.000
02
KgF KgFpm m
h m
= ⋅ =
=
Reemplazando en la expresión:
32 2 2 2
( 2 1) ( 2 1)( )
20.000 15.000 800(0 5) 5.000 4000 10010 105 8.66 5 8.66
p h p p h hp hx x x x x
KgFm
γ γ γΔ Δ Δ Δ − Δ −+ = + = + =
Δ Δ Δ Δ Δ− −
+ = − =+ +
que reemplazada en la expresión del caudal [12.4.5]:
34 4 43,14 0,02 5( ) ( ) (100) 9,6 108 128 128 10,40 / 98a D mQ p h p h
L L segπ πγ γμ μ
Δ Δ ⋅ −= − + = − + = − ⋅ = − ⋅Δ Δ ⋅
FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
Mod.12 Flujo interno laminar (versión preliminar)
16
En litros por minuto, el caudal volumétrico será:
Como el caudal tienen signo negativo, el flujo será ascendente en el tubo, el gradiente de presión adverso predomina frente a la energía potencial gravitatoria en este caso. El n° Re será:
___
0,306 0,02 800Re 122, 4 2.3009,81 (0, 40 / 98)
V Dρμ
⋅ ⋅= = = <<
⋅
Este valor obtenido, confirma que el régimen es laminar y las fórmulas están bien aplicadas. []
35 3
29,6 10 10 60 5,77min min
m lit seg litQseg m
−= − ⋅ ⋅ ⋅ = −

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
Mod.12 Flujo interno laminar (versión preliminar)
17
RESUMEN DE FÓRMULAS PARA FLUJO LAMINAR
A.- Flujo uniaxial entre placas planas. a1.- Placa oblicua a velocidad U, flujo en movimiento por gravedad:
1 2( ) ( )2
( )
U yu p h ay ya l
dudy y a
γμ
τ μ
Δ⎧ ⎫= − + −⎨ ⎬Δ⎩ ⎭
==
a2.- Horizontal con gradiente presión según la longitud:
1 2 ( ) ( )2
U y pu ay ya lμ
Δ= − −
Δ
a3.- Horizontal sin gradiente de presión:
aU
uy
=
B.-Flujo biaxial en Tuberías. b1.- Tubo inclinado y gradiente de presión: Velocidad genérica:
2 2 2 2( ) ( ) ( ) ( )[ ]
4 42 2
( ) [ ]4 4
r a r a p hu r p hx x x
a a p hu p hmx x x x
γ γμ μ
γ γμ μ
− Δ − Δ Δ= + = +
Δ Δ Δ
Δ Δ Δ= − + = − +
Δ Δ Δ
Velocidad media:
2 2( ) [ ]
8 8a a p hV p h
x x xγ γ
μ μΔ Δ Δ
= − + = − +Δ Δ Δ
Caudal:
4 4 4( ) ( ) [ ]
8 128 128a D D p hQ p h p h
x x x xπ π πγ γ γμ μ μ
Δ Δ Δ Δ= − + = − + = − +
Δ Δ Δ Δ

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing.Jorge Rosasco.
Mod.12 Flujo interno laminar (versión preliminar)
18
b2.-. Tubo horizontal con gradiente de presión:
___
0 .
velocidad genérica2 2
( )4
velocidad media2 2
( ) ( )8 8
caudal4 4
( ) ( )8 128
tensión sobre la superficie interior2
44
dh h ctedx
r a pux
a p a pV Vx x
a p D pQx x
D p D pD
μ
μ μ
π πμ μ
π
τπ
= → =
− Δ=
Δ
Δ Δ= − = −
Δ Δ
Δ Δ= − = −
Δ Δ
Δ Δ= =
[]

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod 13. Flujo Interno Turbulento (versión preliminar)
1
13 CONDUCCIÓN DE FLUJO TURBULENTO EN TUBERÍAS 13.1. Distribución de velocidades y tensión de corte para flujo turbulento en tuberías:
Básicamente, consideramos que: a.- El flujo interno turbulento en conductos, es un mecanismo complejo dominado por las fluctuaciones instantáneas del vector velocidad, y en menor medida de otras propiedades como la densidad o la temperatura, aunque en principio solamente consideramos la fluctuación en velocidad. b.- Las partículas fluidas se desordenan pudiendo transitar entre capas diferentes y direcciones diferentes dentro de la geometría de la tubería., el movimiento, ya no está mas ordenado en capas o láminas. c.- El intercambio de la cantidad de movimiento, no se hace ya solamente por trasporte molecular entre las capas, sino por el movimiento de macro regiones giratorias (núcleos de torbellinos) lo que produce razones de transferencia de masa, rozamiento y calor mayores que en el caso laminar. d.- No resulta posible como en el caso laminar elaborar un modelo para obtener la distribución de velocidades, por lo cual se usa una apoyatura empírica o semi-empírica. Para la obtención de estos modelos empíricos, en referencia a la Fig. 13.1_1, observamos que para la dirección del flujo según x, el valor promedio de la velocidad es u , pero para cualquier posición que analicemos aparecen fluctuaciones de valor ± u’ variables con el tiempo, si consideramos un intervalo
mas o menos amplio ]12[ tt − , el promedio de estas fluctuaciones − 'u = 0, la frecuencia de estas
perturbaciones es del orden de los 1000 Hz. Las fluctuaciones del vector velocidad también se producen para las otras dos componentes , v y w de la velocidad para las direcciones y y z respectivamente en la posición considerada, como se observa en los diagramas a la derecha del anterior siendo en estos casos la velocidad promedio en estas direcciones cero. En base a lo anterior , la componente instantánea de la velocidad en un punto de cota r del conducto sería:
´_
uuu ±= con:
∫=T
dtuT
u0
_ 1
13.1_1

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod 13. Flujo Interno Turbulento (versión preliminar)
2
Para tubería con conducción turbulenta, parecería lógico definir el patrón de distribución de tensiones para una sección longitudinal en forma análoga al caso laminar acuerdo a:
][_
drud
L μτ = donde )(rfu =
Pero esto da valores pequeños comparados con los observados experimentalmente, por lo cual se conviene en agregar a la anterior, una componente de la viscosidad debida al flujo turbulento:
][_
drud
T ητ =
resultando:
L Tτ τ τ= + donde a η se la denomina viscosidad de remolino, sin embargo hay que tener en cuenta que la viscosidad de remolino no es una constante para el fluido como lo es la viscosidad dinámica μ, sino que es una función del Nº de Re y de otros factores como la temperatura, la rugosidad de la pared interior y posiblemente otras variables, por lo cual no es obtenible de tablas como un valor típico de directa aplicación. No obstante con la anterior definición podemos definir un valor genérico teórico para la distribución de tensión de corte entre los “estratos turbulentos” como:
_
[ ] [ ]d uL T dr
τ τ τ μ η= + = + [13.1.1]
Un análisis más detallado de lo que sucede puede hacerse con la ayuda de la Fig. 13.1_1b, el pasaje de un núcleo de turbulencia proveniente desde una región inferior a través de una pequeña área ΔA de la región de flujo ubicada por debajo del eje central del conducto en una posición r , producirá un intercambio de cantidad de movimiento, que hace disminuir la velocidad de las partículas que por allí circulan , y a la inversa, un núcleo que proviene de la capa por encima, hará aumentar la velocidad en las partículas, la razón de cambio de flujo másico intercambiado con los núcleos con movimiento vertical v’ puede escribirse matemáticamente como:
2[ ´ ] [ ] [ ]3Kg m Kgv dA mm s s
ρ− =
El signo corresponde a la ralentización de las partículas del la pequeña área, cuando v´ sea positiva y dará un valor positivo cuando v’ sea negativa y el núcleo venga desde arriba. La razón de cambio en la cantidad de movimiento en la capa dA, en términos de [m v / t] debido a los núcleos que atraviesan y se mueven con velocidad horizontal de fluctuación u’ será entonces:
2[ ´ ] ' [ ] [ ] [ ]3Kg m m Kg mv dA u m New dFm s s s s
ρ− = = =
Habrá entonces, fluctuaciones horizontales u’ de la capa positivas y negativas dependiendo de si el núcleo de turbulencia proviene desde una capa más baja o más alta, que dan lugar a este rozamiento adicional.

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod 13. Flujo Interno Turbulento (versión preliminar)
3
y el valor de las tensiones de corte aparentes debida a la fluctuación de velocidad en la capa será:
[ ' ']dF u vT dAτ ρ= = −
Como los valores de las fluctuaciones indicadas u’ y v’ son instantáneos, esta cantidad, tomada para toda la cota r para un intervalo largo de tiempos, nos daría un promedio:
[ ' ']dF u vT dAτ ρ= = −
Aquí tomamos en cuenta un resultado de la física estadística, que nos indica que si bien:
' 0 , ' 0
' ' 0
u v
u v
= =
≠
o sea que para cada capa o “estrato turbulento” finalmente, podremos considerar
_
[ ] [ ' ']d u u vT drτ η ρ= = − [13.1.2]
Fig. 13.1_1b
Entonces, reemplazando el resultado [13.1.2] en [13.1.1], queda el valor teórico final de la tensión tangencial en las distintas posiciones del radio, referidas a un corte longitudinal del tubo, que tendrá según lo condiciona la ecuación [13.1.2] un carácter de tensión media:
_ ___ ______
[ ] [ ] [ ] [ ' ']d u d u u vL T dr drτ τ τ μ η μ ρ= + = + = − [13.1.3]
El análisis del resultado [13.1.3] demuestra que para una región en movimiento ubicada a una cota r de la tubería , la componente macro del gradiente será constante, sin embargo la tensión tangencial aparente
debida a turbulencia, depende de las fluctuaciones de velocidad del flujo ______
' 'u v , y este valor medio depende de muchos factores particulares de cada flujo turbulento, y no puede ser resuelto analíticamente, lo que significa que el coeficiente η, no puede tomarse como constante, la variabilidad de η como dependiente sobre todo de la posición en la tubería,y del nº de Re, hace imposible la determinación analítica de una distribución de velocidades como se hizo en el Mod. 12 para flujo laminar.

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod 13. Flujo Interno Turbulento (versión preliminar)
4
Por eso para la determinación de este perfil de velocidades medias, dependemos de los datos empíricos, la determinación empírica del perfil de velocidades en los casos reales, nos indica una forma que muta a medida que Re aumenta, a partir desde la distribución de parábola de los flujos laminares, a una especie de parábola más aplanada casi hasta la periferia del tubo; Fig.13.1_2 siguiente, también se observa que la línea de borde del perfil en este caso es difusa, debido a la fluctuación del vector velocidad, pero que define una curva promedio (en línea de trazos). Esta zona aplanada aumenta a medida que aumenta Re, y también aumenta el valor de la velocidad media máxima.
Fig.13.1_2
La búsqueda de una función analítica como la representada el la figura de la derecha para distribución de flujo turbulento en un corte longitudinal que contenga al eje principal, es difícil de establecer , y se recurre ya sea a la representación de la misma como una suma por tramos de tres o cuatro funciones distintas, una para cada tramo, o bien a una aproximación lo más fiel posible con una sola relación funcional. Los estudios experimentales sobre distribución de velocidades en tubería cilíndrica han demostrado que el patrón de velocidades del perfil turbulento que mejor se ajusta a lo real viene dado por la siguiente ecuación:
1/ 1/ 1/ 1/( ) [1 ] ( ) [1 ]
n n nnu y r y ru u umx mxa au a amx= = − → = = − [13.1.2]
Un patrón que es aproximadamente válido para Re comprendidas entre 4.000 y 3.240.000, corresponde a un exponente n =7 y para determinar cada velocidad V, la cota y se mide desde la periferia interior de la tubería hacia el centro, como se indica en la figura anterior. Para valores comprendidos entres Re = 4000 (rango de transición) y 100.000, se toma n = 6, y para valores por encima de Re= 3.240.000, se toma n = 9.
La distribución de velocidades en turbulento resulta en una función que es más achatada que en laminar, disminuyendo el valor de Vmx más lentamente hasta aproximarnos a la periferia, donde se sigue cumpliendo la condición de no deslizamiento. Además deben tomarse en cuenta la discusión sobre promedios de velocidades en flujo turbulento permanente, que ya citamos en el Mod. 12. Los valores de mxuu y , de la fórmula [13.1.2] son en realidad valores medios mxuu y , , se ha omitido el bastoncito para simplificar la notación, pero deben ser considerados como valores medios para flujo turbulento permanente.

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod 13. Flujo Interno Turbulento (versión preliminar)
5
Para el patrón de la Fig.13.1_2 derecha, se puede también obtener el valor medio de toda la distribución, o velocidad media-media que es el valor de la velocidad considerando como promedio uniaxial que usamos para cálculo de caudal:
/2
___0
( ) 2 22 max2 / 4 ( 1) (2 1)
D
u r r drn uu V
D n n
π
π
−−
= = =+ +
∫ en la cual se tomó r = D/2 - y
El resultado anterior se obtiene de aplicar a la integral, el resultado [13.1.2]. Asimismo, para tuberías lisas con n° Re hasta 3.10 6 , ha de aplicarse la fórmula de Blassius para el cálculo de la tensión de corte (tensiones tangenciales) en la pared.
___1/4
__ 20.0225( ) Vo aVυτ ρ= [13.1.3]
Siendo
ρμν = la viscosidad cinemática, y : a =D/2, el radio interior de la tubería.
En la figura siguiente Fig.13.1_3, se da un diagrama adimensionalizado, para medio tubo, que permite referir todos las distribuciones para los distintos posibles exponentes n, en un solo diagrama, con ayuda del mismo y con las condiciones geométricas especificas de nuestra tubería se puede construir rápidamente la distribución real de velocidades internas para flujo turbulento. Fig.13.1_3 13.2.- Análisis de flujo turbulento:
Nuestro análisis no podrá basarse ahora en elementos diferenciales de fluido, como en el caso laminar, sino en efectos macro, que deben realizarse a partir de la “ecuación integral de la energía” ordenada convenientemente para flujo incompresible, tomando un volumen de control dentro de una tubería con las áreas de intercambio de flujo normales a la velocidad media entre las secciones de entrada y salida, la misma se expresa como:
r/a

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod 13. Flujo Interno Turbulento (versión preliminar)
6
)12()()2
()( 12
21
222 qieiezzg
VVpp ieje −−+−+
−+
−=−
ρω [13.2.1]
donde ωeje y q eran las cantidades de trabajo y calor respectivamente, intercambiadas por unidad de masa, o sea: ωeje = dWeje/dm y q = dQ/dm. Si consideramos solamente el flujo impulsado por presión en un tramo de tubería horizontal de diámetro constante, sin intercambio de trabajo mecánico dentro del tramo, la expresión anterior se reduce a:
Lhqieieppp=−−=
Δ=
−)12()( 21
ρρ [13.2.2]
el calor considerado en la ecuación [13.2.2], es el creado por el rozamiento durante la circulación del flujo y es almacenado por el fluido o cedido al medio ambiente o ambas cosas parcial y conjuntamente, en este caso, consideramos que parte del calor se incorpora al fluido que circula creando un aumento de su energía interna y por tanto de su temperatura y parte escapa al exterior, los términos se han integrado como hL .La unidad de hL es: {N.m/kg] La cantidad hL es denominada pérdida de carga, y a veces puede expresarse en función de una altura piezométrica indicada como una perdida de carga en metros al dividirla por la aceleración de la gravedad en ambos miembros de la ecuación [13.2.2] dando:
1 2
( )2 1( ) = L Fp p hp e e qi i h
g g g gp hF
ρ ρ
γ
→− Δ − −
= = =
Δ=
[13.2.2b]
como hF = [hL / g] resulta una expresión de la pérdida de carga indicada en metros, como se observa de sustituir las unidades:
][2/1 msegmKg
mN=⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡
En general hL ó hF resultan difíciles de cuantificar analíticamente, y se evalúan empíricamente. Es evidente que el resultado de la ecuación [13.2.2] para tubería horizontal debe ser válido tanto para flujos laminares Re < 2.300, como para flujos definidamente turbulentos Re > 4.000, ya que proviene de la ecuación de Energía que tiene validez general. Consideremos ahora la tubería inclinada, Fig.13_2.1, deberíamos sumar en este caso la pérdida de energía que representa la variación de altura:
Lhzzgppp+−=
−=
Δ )12(21ρρ
[13.2.3]
g (z2 - z1) depende de valores geométricos conocidos por lo cual a partir de Δp podemos conocer hL.

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod 13. Flujo Interno Turbulento (versión preliminar)
7
Fig.13.2_1 Consideremos ahora la tubería además de la inclinación, con un cambio de sección, de un tramo más delgado vinculando el cambio de sección con un accesorio curvo, (reductor angulado), como se observa en la Fig.13.2_2 siguiente. Fig.13.2_2 En este caso la reducción impone un cambio de velocidad , y , la caída de presión entre 1 y 2 sería:
LhzzgVVp+−+
−=
Δ )12(2122
ρρ [13.2.4]
Las líneas de corriente convergen entre 1´y 2’ , el aplastamiento de las líneas de corriente del flujo produce un incremento de la pérdida de energía debida al accesorio hA, por lo cual a hL se lo puede considerar formado por tres sumandos, dos de tubería recta y uno de accesorio.
2´2'11 hAhhLh ++= en este caso el cálculo requiere de la medición del conjunto p1 p2 V1 V2 z1 y z2. ; o bien de; p1 p2 V1 A1 z1 y z2 y calcular V2 por supuesto las velocidades deben estimarse con sus valores medios ya sea flujo laminar o turbulento, y luego se estima el valor total de la perdida de carga hL. Si se calculan las pérdidas de carga independientes para los tramos rectos 1 - 1’ y 2´- 2, podemos indirectamente estimar la pérdida de carga en el accesorio por diferencia, aunque normalmente estas pérdidas de carga de accesorio, están tabuladas en manuales para los distintos tipos y tamaños de acople a tubería.

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod 13. Flujo Interno Turbulento (versión preliminar)
8
13.3 Factor de Fricción. Por otra parte podemos hacer una estimación de la pérdida de carga a través de otra constante empírica denominada: factor de fricción a partir de los métodos del análisis dimensional, partiendo de presuponer que el flujo en una cañería depende de los siguientes parámetros: 1.- Diámetro de la tubería “D” 2.- Longitud de la tubería “ΔL” 3.- Coeficiente de viscosidad “ μ ”
4.- Velocidad media del flujo en la sección recta “ AqV /= ”en lo sucesivo lo indicamos con V . 5.- Densidad “ρ”
6.- Rugosidad media absoluta de la tubería _e (es la altura media de las crestas o los valles respecto del
radio interior nominal tomado como línea de base).en lo sucesivo lo indicamos con e . El hecho que ahora consideremos una dependencia adicional con la rugosidad puede interpretarse en forma algo burda por el hecho que las partículas turbulentas son macro regiones o parcelas del fluido bastante grandes respecto de la partículas laminares que las considerábamos mesovolúmenes y por tanto estas grandes regiones no se “atascan” en los valles y las crestas (disminuyen los efectos electrostáticos) por lo cual el tamaño de la rugosidad en este caso puede influir en el movimiento y en el intercambio de calor. En la Fig.13_3.1 se ve un corte de la pared de un tubo donde se han ampliado enormemente la rugosidad interior para poder definir sus parámetros. Fig.13_3.1 La rugosidad media absoluta se define como la diferencia en tre el radio promedio real y el nominal siendo n el número de mediciones, es decir:
_1
[ ]n
i
aie a
n== −∑
[13.3.1]
También se define la rugosidad relativa como la razón: __
ó e eD D
Entonces, expresamos la caída de presión genérica para conducción de flujo laminar o turbulento en tuberías, con una dependencia funcional respecto a los siguientes parámetros.
_ ( , , , , , )p h D L V eμ ρΔ =
s

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod 13. Flujo Interno Turbulento (versión preliminar)
9
En la función genérica anterior, la velocidad considerada V que tomamos es la velocidad media en el conducto. Si aplicamos a esta relación funcional los resultados del teorema π de Buckingham1 , vemos que n = 7 y r = 3, o sea: n – r = 4; y habrá por tanto cuatro grupos adimensionales, tres independientes Haciendo el trabajo de encontrarlos, obtenemos que ellos son: el N° de Euler, el N° de Reynolds, y dos relaciones adimensionales geométricas L/D y e/D, a este última se lo denomina como dijimos más arriba, rugosidad relativa al diámetro. Podemos escribir entonces la relación funcional entre un grupo adimensional con los restantes, normalmente se toma al Nº de Euler como la variable dependiente, y queda siendo Euler:
2 2 2
2
( )
( ; ; )
UF PE
V D V
ΔP VD L ehV D D
ρ ρ
ρρ μ
Δ= = →
Δ=
o bien:
);(Re; De
DLhEU
Δ= [13.3.2]
La razón pΔ /ρ (que interviene en el número de Eu), es la energía específica de impulsión. El profesor Moody observó que al momento de impulsar un caudal definido, pΔ /ρ resulta directamente proporcional a la longitud de la tubería, e inversamente proporcional a su diámetro es decir proporcional a la relación ∆L/D ; entonces el grupo (ΔL / D) puede formar parte de una constante de proporcionalidad, y salir fuera de la función indicada, o sea podemos escribir un nuevo funcional:
);( 1
_
2 DeDVh
DL
Vp
μρ
ρΔ
=Δ
esta expresión a su vez, también la podemos escribir en función de una nueva relación funcional h2 trasponiendo términos y agregando el factor ½, que nos servirá para construir la expresión de la presión dinámica, quedando:
);( 2 2 21
DeDVh
DLVphL
−Δ
=Δ
=μ
ρρ
[13.3.2b]
En la práctica, a esta función desconocida )(Re; 2 Deh se la llama “coeficiente o factor de fricción”, y se la
representa con la letra “ f ”, y la expresión de la perdida de carga, queda finalmente expresada como:
fDLVhL 2
21
⎥⎦⎤
⎢⎣⎡ Δ
=
1 El detalle de extracción de los números adimensionales para este caso está dado al final, en la Nota de Aplicación.

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod 13. Flujo Interno Turbulento (versión preliminar)
10
Que puede ser escrita explicitando la presión dinámica como:
fDLVp ]][2
21[ Δ
=Δ ρ [13.3.3]
que se denomina ecuación Darcy-Weissbach, que nos determina la diferencia de presión entre entrada y salida de una tubería necesaria para la impulsión del flujo y la potencia de bombeo En las expresiones anteriores, no debe confundirse la nomenclatura de hL, que representa el factor de fricción con las funciones h, h1 ,h2 de (Re y e/D). Por otra parte, para flujo laminar, habíamos obtenido en el Mod 12, como expresión de caudal para tubería cilíndrica:
LPDQ Δ
=μ
π 128
4
por tanto, despejando Δp:
128p
128
44 ρπμ
ρπμ
DQL
DQL
p =Δ
→=Δ
igualando a la expresión general [13.2.2] quedaría:
fDLV
DQLPhL 2
21128
4 ⎥⎦⎤
⎢⎣⎡==
Δ=
ρπμ
ρ y como
2
4DQ V π
= ⋅
Re64
2
2
4128
4
2
=→== fD
fLVD
DVLhL
ρππμ 13.3.3b
O sea que para flujo laminar, podemos utilizar la expresión [13.3.3] con f = 64/Re , tratando al flujo laminar como un caso particular de flujo general. Por otra parte, vemos que f en este caso, solamente depende para flujo laminar de Re , y no de la rugosidad, como ya habíamos expresado en el Módulo 12. Observamos que la expresión de f para flujo laminar, f = 64/Re en función de Re tiene la forma de una hipérbola equilátera, ( y = k/x) la cual resulta una “línea recta” cuando es trazada sobre un papel doble logarítmico en el rango de Re laminares., ya que si aplicamos logaritmación a ambos miembros de la anterior quedaría log f = log 64 - log Re o sea una recta de pendiente negativa que corta al eje y en C del tipo: y = C – x.

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod 13. Flujo Interno Turbulento (versión preliminar)
11
13.4.- Diagrama Nikuradse. Como nuestro propósito es graficar f como función de Re, para todo el rango del n° Re, mas allá del régimen laminar, la construcción de la gráfica es empírica, se toman como parámetros los índices de rugosidad relativa “e / D” para las distintas curvas , y se obtiene el denominado diagrama “Nikuradse” así llamado en homenaje a su autor, Johann Nikuradse, .en las que se grafica n° Re en abscisa; f o factor de fricción en ordenadas con e / D o rugosidad relativa como parámetro, por ejemplo e / D = 1/120 significa que si el diámetro es 120 mm la variación media del radio de la tubería es 1 mm.
Fig.13.4_1.1 Las curvas Nikuradse se dan esquemáticamente en el diagrama 13.4._1 , y las curvas reales en la Fig. 13.4_2, la parte recta indicada con el Nº 1 es la representación de la curva para los rangos de Re laminares, entre 0 y 2300, y como se dijo es una línea recta de pendiente negativa, la línea indicada con Nª 2 es la asíntota inclinada correspondiente a las zona de tubería lisa (ZTL) ,da valores del factor independiente de la rugosidad; a partir de esta recta oblicua se desprenden las curvas Nº 4 de la zona de transición, (TR) donde el factor varia con la rugosidad y también con Re, finalmente las curvas se hacen asintóticas para cada rugosidad a un factor independiente, zona Nº3 o zona de tubería rugosa ahora el factor solamente depende de la rugosidad y no de Re.
0.06
0.03
0.015
10 3 2.3
2x10 5

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod 13. Flujo Interno Turbulento (versión preliminar)
12
Fig.13.4_2
A la derecha se dan los parámetros de rugosidad de cada curva que van desde 0.033 a 0.00098 ; el valor de f de 0.03 coincide aproximadamente con el valor del inicio de la transición laminar-turbulento, esto es Re = 2000 /2300, todas las tuberías en forma independiente de la rugosidad, siguen esta recta de pendiente 64 / Re, para flujo laminar de Re < 2300, a partir de este valor, ya entrando en el régimen turbulento, la rugosidad interior de la tubería toma importancia, y habrá que determinar la rugosidad y ver que curva debemos usar, sin embargo todas ellas son asintóticas a la izquierda a una curva de tubería lisa (que corresponde al parámetro e / D = 0. En el rango de Re comprendido entre 2300 y el valor al cual cada curva particular se desprende, se denomina “zona de tubería lisa” [ZTL], en esta región de números Re, el flujo turbulento no posee demasiada energía en la zona próxima a la pared del tubo y se establece una zona de comportamiento laminar, a veces indicada como subcapa laminar, como para que la rugosidad no tenga influencia, esto se observa en las curvas, que en forma independiente de la rugosidad convergen en la misma recta. En la Fig.13.4_3, se ve que los mesovolúmenes de tamaño casi diferencial, de baja energía se acumulan oa adhieren en los valles y picos y dejan una zona lisa en la cual no aparece la influencia de la rugosidad. La sub capa laminar es ancha y cubre a los picos. Al finalizar la zona de tubería lisa, se establece una zona de transición (TR), la energía del fluido, dado lo creciente del Re, hace que tome importancia la rugosidad , ya que la zona de sub capa laminar se hace tan delgada y próxima a la pared como para que los picos queden al descubierto e interactúen entonces con las macro partículas turbulentas, algunas de carácter turbillionario de manera que la rugosidad influye en el escurrimiento y f crece rápidamente. Esta zona se prolonga hasta que cada curva toma una nueva asintota casi horizontal En esta ultima zona de asíntota casi horizontal se denomina zona de tubería rugosa (ZTR) y en ella f permanece casi constante ya que se alcanza un valor de resistencia a la fricción máxima que es casi

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod 13. Flujo Interno Turbulento (versión preliminar)
13
independiente del Re, esto se prolonga a la derecha hasta que aparece un nuevo fenómeno, que hace aumentar nuevamente la resistencia , el valor de f y la diferencia de presión necesaria para la impulsión del fluido, que se llama resistencia de onda , es un fenómeno que aparece a Re muy altos, (no reprensados en la curvas) asociado con fenómenos de compresibilidad de los regimenes transónicos de flujos de gases como el aire. En este rango, la resistencia se debe mas a los esfuerzos normales que a los tangenciales. Resumiendo, todas las curvas de rugosidad son asintóticas a bajos Re, del rango turbulento, con la “curva de tubería lisa”, donde comienza una zona de transición diferente para cada curva, luego se apartan para Re más altos a valores asintóticos horizontales donde ya la fricción no aumenta más a pesar de incrementar Re , estas zonas rectas son las zonas de diseño para tubería rugosa, ya que el f no crece y podemos aumentar bastante el caudal trasportado por la tubería sin incrementar la pérdida de carga. Fig.13.4.3 13.5.- Diagrama de Moody: El diagrama de Nikuradse se ha desarrollado para condiciones de rugosidad artificiales, en las que se pegaba arena de distintas granulometría a superficies interiores de tubos de vidrio lisos, se presenta entonces la cuestión de saber en qué grado se aproxima esto a las condiciones de las tuberías reales. El Profesor Lewis F. Moody ha efectuado un estudio extenso en tuberías comerciales para modificar el diagrama Nikuradse y aproximarlo más a las condiciones reales. En los gráficos siguientes se dan los diagramas de Moody, para ver como se opera con ellos. En el primero se obtiene la rugosidad relativa [e / D], entrando con el diámetro de la tubería (diámetro interior) sobre la línea superior horizontal en pulgadas o sobre la línea horizontal inferior en [m m], luego ir hasta las rectas parametrizadas por tipo de material y sacar el valor [e / D] a la izquierda. Con el dato obtenido de “e/D” se entra en el segundo diagrama, sobre las curva correspondiente de las curvas de Moody, luego ubicando el n° Re de operación en abscisas subir hasta la curva correspondiente parametrizada por la rugosidad “e/D” obtenida antes y, finalmente, se saca el valor del factor de fricción f de la tubería, en ordenadas a la izquierda con el cual se calcula el valor de la pérdida de carga.

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod 13. Flujo Interno Turbulento (versión preliminar)
14
Diagrama Moody_1

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod 13. Flujo Interno Turbulento (versión preliminar)
15
Diagrama Moody_2 En el segundo diagrama Moody, también puede observarse una separación de áreas en tres zonas separadas por la “curva de tubería lisa” y por la curva de trazos a derecha. Queda definida igual que antes la ZTL o zona de tubería lisa, la ZT o zona de transición en la región central y la ZTR o zona de tubería rugosa también llamada más correctamente Zona de Turbulencia total a la derecha de la curva de trazos Las curvas que aparecen en el segundo diagrama, fueron aproximadas por una ecuación analítica empírica, denominada ecuación Colebrook , que aproxima el valor de las mismas y a veces se utiliza en reemplazo de los diagramas Moody, si resulta conocida la rugosidad media específica, y el nº Re.
]Re
51.27.3
[ln86.01fD
ef
+−= [13.5.1]
13.6 Pérdidas menores en accesorios: En el desarrollo de tuberías pueden aparecer accesorios tales como empalmes, codos , válvulas de cierre, válvulas de control de caudal, curvas, etc. Esto obliga a tomar en cuenta las pérdidas en éstos elementos. Estas pérdidas se calculan a través de resultados experimentales y se obtiene en tablas para el tipo de accesorios definidos por el valor de un coeficiente sin dimensiones “k”, llamado “pérdida menor de accesorio”.1 El resultado es de la forma:
1 ver por ejemplo, Flujo de Fluidos (Div. de ingeniería de CRANE) Mc Graw 1987.

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod 13. Flujo Interno Turbulento (versión preliminar)
16
][ 2
]22
[ o ][ 2
2
2
mg
Vkh
sm
KgNmVkh
F
L
=
=
o bien:
No se hace diferencia entre flujo laminar o turbulento, asumiéndose el mismo valor para el coeficiente en ambos regímenes al igual que la constante y la velocidad V se establece como la velocidad media corriente arriba o corriente abajo del accesorio. 13.7. Pérdida por ensanchamiento brusco de tubería: Un ensanchamiento brusco se indica en la figura siguiente, el flujo se estagniza o detiene en la zona sombreada, dando lugar a pérdidas por formación de remolinos en estas zonas de flujo muerto.
Fig.13_7.1 Puede demostrarse analíticamente que la pérdida por el ensanchamiento viene dado por:
2
1
2
1
21 2(1 )2
22 2(1 )2
L
f
AVhA
AVhg A
= −
= −
o bien:
13.8.- Optimización del diámetro de una tubería. La ecuación [13.3.3] nos da la pérdida de carga en una tubería, cuando analizamos esto en su consideración básica de tubería horizontal, podíamos vincular directamente la perdida de carga con el trabajo específico de bombeo [N.m / Kg], y nos queda:
ρpf
DLVhL
Δ=⎥⎦
⎤⎢⎣⎡= 2 21 [13.8.1]
Como el caudal que circula es:
___ ___2 4 24D QQ V V
Dπ
π⎡ ⎤= → =⎢ ⎥⎣ ⎦
Reemplazando este valor en la [13.7.], obtenemos:
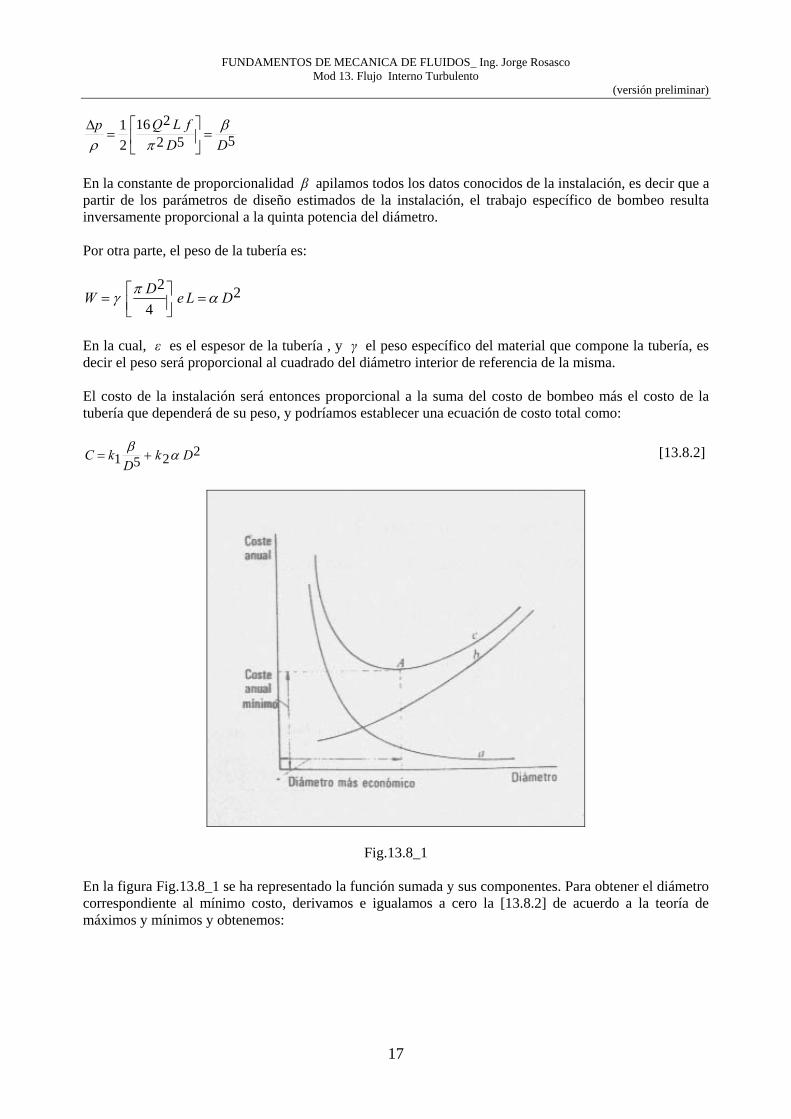
FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod 13. Flujo Interno Turbulento (versión preliminar)
17
552216
21
DDfLQp β
πρ=⎥
⎦
⎤⎢⎣
⎡=
Δ
En la constante de proporcionalidad β apilamos todos los datos conocidos de la instalación, es decir que a partir de los parámetros de diseño estimados de la instalación, el trabajo específico de bombeo resulta inversamente proporcional a la quinta potencia del diámetro. Por otra parte, el peso de la tubería es:
2 24DW e L Dπγ α⎡ ⎤= =⎢ ⎥⎣ ⎦
En la cual, ε es el espesor de la tubería , y γ el peso específico del material que compone la tubería, es decir el peso será proporcional al cuadrado del diámetro interior de referencia de la misma. El costo de la instalación será entonces proporcional a la suma del costo de bombeo más el costo de la tubería que dependerá de su peso, y podríamos establecer una ecuación de costo total como:
2251 DkD
kC αβ+= [13.8.2]
Fig.13.8_1 En la figura Fig.13.8_1 se ha representado la función sumada y sus componentes. Para obtener el diámetro correspondiente al mínimo costo, derivamos e igualamos a cero la [13.8.2] de acuerdo a la teoría de máximos y mínimos y obtenemos:

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod 13. Flujo Interno Turbulento (versión preliminar)
18
7/1
'2'57/1
221506
15220 ⎥⎦⎤
⎢⎣⎡=⎥⎦
⎤⎢⎣⎡=→=−−→=
αβ
αββα
kkDDkDk
dDdC [13.8.3]
La expresión anterior nos permite obtener la primera aproximación del diámetro óptimo necesario, debemos ajustar este valor en función de la disponibilidad industrial de este tubo, aproximando un valor de diámetro nominal lo mas próximo por encima o por debajo del valor obtenido, con respecto a los diámetros, espesores y rugosidades (tipo y calidad de material) disponibles. 13.9.- Pautas para la resolución de problemas con tuberías: Para la resolución de problemas donde se debe tener en cuenta la pérdida en tuberías y accesorios, sobre tramos completos de instalación, debemos tomar en cuenta nuevamente la ecuación general de la Energía que incluye pérdidas en tubería y accesorios, y considerando en general el trabajo de ejes, si hay instalada turbo maquinaria.
)()()2
()( 1212
21
2212 qeezzgVVppW iieje −−+−+−
+−
=−ρ
[13.9.1]
O bien:
Leje hzzgVVpp
W +−+−
+−
=− )(2
)( 12
21
2212
ρ [13.891b]
La unidad de hL es )(2
2
2
2
kgmN
kgkg
segm
segm ⋅
== o sea es una pérdida específica de energía.
Si en la expresión [13.7.1.b] dividimos en ambos miembros por “g”, la aceleración de la gravedad, nos queda:
2 22 1 2 1
2 1( ) ( )2
ejeW p p V V z z hFg gγ− −
− = + + − +
donde hF es la altura de pérdida piezométrica hLhF g
= y se expresa en mm
segsegm
=⋅ )(2
2
2
.
La altura piezométrica permite trabajar como si el problema fuese de conducción de fluido ideal, pero considerando que en la tubería haya un desnivel adicional hacia arriba de hF metros, que representa una extensión de la línea en una cantidad equivalente a las pérdidas de carga por fricción y accesorios. Problema Propuesto 1: Determinar la pérdida de energía del flujo de 8.000 lit/min de un aceite de viscosidad cinemática
5 21 10 /m segυ −= ⋅ a través de una tubería de fundición de 300 m. de longitud y de diámetro int. D=200mm

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod 13. Flujo Interno Turbulento (versión preliminar)
19
a) Determinamos la velocidad media a partir del caudal dado .
___ __ 3 2
___
2
8m 1 min / /min 60seg 4
8 m4,23 seg3,14 0, 260
4
Q V A V Q A
V
πϕ= ⋅ → = = ⋅ =
= =⋅⋅
b) Cálculo de n° Re:
5
4, 23 0, 2Re 84.6001 10
V D V Dρμ ϑ −
⋅= = = =
⋅
del primer diagrama de Moody, entrando con D = 20cm = 200mm, hasta la recta del material de la tubería: “fundición”, sacamos para e/D = 0,0013. Luego en la segunda gráfica de Moody, entrando con el valor de Re=84.600, interpolando con la curva e/D = 0,0013, obtenemos f = 0,024. c) Calculamos la pérdida de carga:
___ 2 2
2
1 4, 23 3002( ) 0,024 322 3222 2 0, 2L
L m N mh V fD seg kg
⋅= = ⋅ ⋅ = =
o bien la pérdida expresada en altura piezométrica:
2 2
2
322 32,82 32,829,81
h m segLh mF g seg m= = = =
Notas Complementarias. 13.10.- Obtención de los grupos adimensionales para impulsar flujo turbulento en tubería.. A partir de la caída de presión indicada como funcional de sus parámetros intervinientes:
),,,,,( eDLVhp Δ=Δ μρ La función explícita, se podría obtener expresándola en forma genérica como una serie infinita, de la siguiente forma.
....)2222222()1111111( +Δ+Δ=Δ gefDdLcVbakgefDdLcVbakp μρμρ Donde los ki son coeficientes adimensionales y los ai, bi ,ci… son exponentes enteros de la serie. Lo que sabemos a priori, es que para mantener la homogeneidad física, todos los términos de la serie deben tener las mismas dimensiones, por tanto, para establecer las relaciones dimensionales, nos alcanza con analizar cualquier término, y entonces quedaría:

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod 13. Flujo Interno Turbulento (versión preliminar)
20
gLfLdLc
TLb
LTMa
LM
LTM
⎥⎦⎤
⎢⎣⎡
⎥⎦⎤
⎢⎣⎡
⎥⎦⎤
⎢⎣⎡=⎥⎦
⎤⎢⎣⎡
32
Como las dimensiones fundamentales deben se iguales m.a.m obtenemos comparando la anterior: Para M 1 = a + b Para L -1 =-3a-b+c+d+f+g Para T -2 = - b - c Hay por lo tanto 6 incógnitas con 3 ecuaciones, esto nos obliga a poner tres en función de las otras tres, elegimos una por medio, o sea a, c y f entonces: a = 1-b c = 2-b f = -1+ 3a + b – c – d -- g = reemplazando la primera y la segunda en la tercera y operando queda: f = – b – d – g Entonces los exponentes de cada término quedarán:
][1][2
][b p][
][][][]2[][]1[][
gegDdDbDdLbV
Vb
gegdbDdLbVbbp
⎥⎦
⎤⎢⎣
⎡Δ⎥⎦
⎤⎢⎣⎡
⎥⎦
⎤⎢⎣
⎡≡Δ
→−−−Δ−−≡Δ
μρρ
μρ
Reagrupando para iguales exponentes:
[ ] [ ] 2 2
g gb bd dL e p L ep VVD D D V VD D Dμ μρ
ρ ρ ρ⎡ ⎤ ⎡ ⎤ ⎡ ⎤Δ Δ Δ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤Δ ≡ → ≡⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦⎣ ⎦ ⎣ ⎦ ⎣ ⎦
Ahora volvemos a la forma explícita del funcional
21 1 2 21 ...1 22
g gb bd dp L e L ek kV VD D D VD D D
μ μρ ρ ρ⎡ ⎤ ⎡ ⎤ ⎡ ⎤Δ Δ Δ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤= + +⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦⎣ ⎦ ⎣ ⎦ ⎣ ⎦
O sea la forma general compacta sería:
1 1
2 i i
g gib i id i d iibp L e VD L ek ki iV VD D D D Dμ ρ
ρ ρ μ
∞ ∞
= =
−⎡ ⎤ ⎡ ⎤ ⎡ ⎤Δ Δ Δ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤= =⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦⎣ ⎦⎣ ⎦ ⎣ ⎦∑ ∑
Esta última es la expresión de una relación entre una variable dependiente ⎥
⎦
⎤⎢⎣
⎡ Δ2
Vp
ρ, que es el número de
Euler y tres variables independientes, el número de Reynolds, y dos relaciones adimensionales generales entre longitudes., es decir podemos expresar esta relación funcional entonces como:
),(Re,De
DLhEu Δ
=
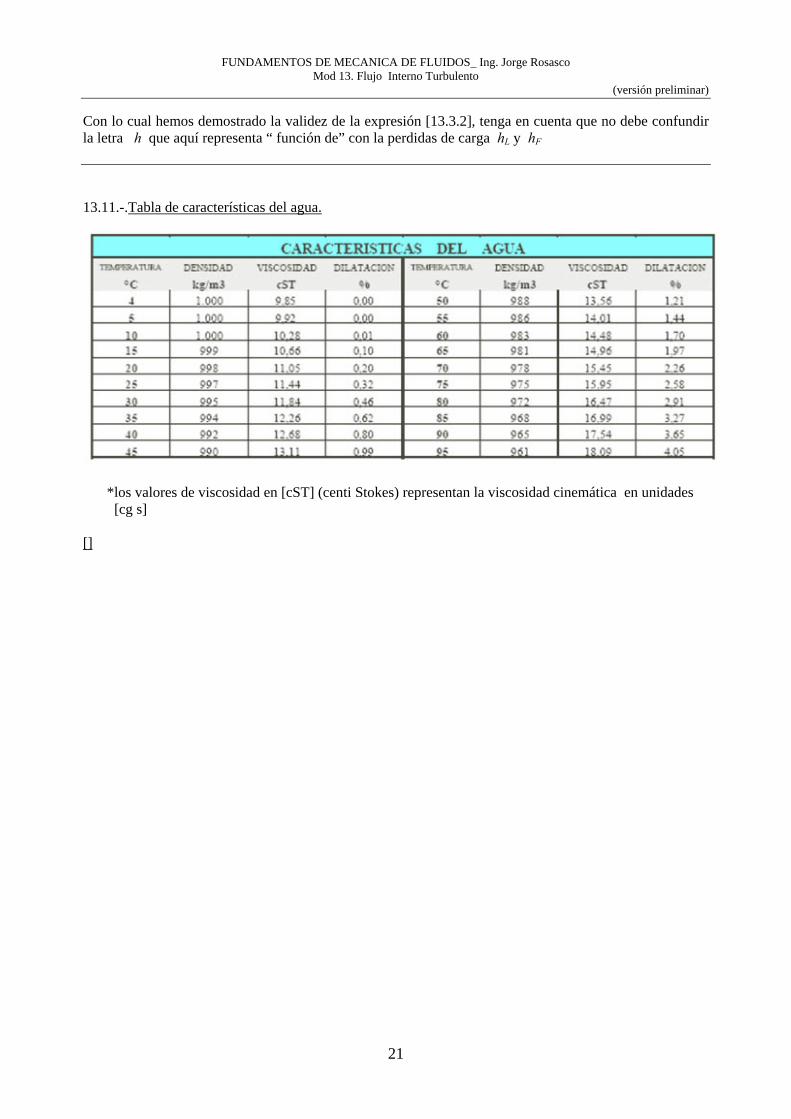
FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing. Jorge Rosasco
Mod 13. Flujo Interno Turbulento (versión preliminar)
21
Con lo cual hemos demostrado la validez de la expresión [13.3.2], tenga en cuenta que no debe confundir la letra h que aquí representa “ función de” con la perdidas de carga hL y hF 13.11.-.Tabla de características del agua.
*los valores de viscosidad en [cST] (centi Stokes) representan la viscosidad cinemática en unidades [cg s]
[]

FUNDAMENTOS DE MECANICA DE FLUIDOS_Ing._Jorge Rosasco
Mod 14 Canales. (version preliminar)
1
14 MOVIMIENTO PERMANENTE EN CANALES. 14.1.a.- Un canal es en conducto en general de sección abierta, y en contacto con la presión atmosférica, pero también el flujo en una conducción cerrada se considera como canal, si el fluido no ocupa la totalidad de su perímetro interior, por ejemplo el trasporte cloacal, o de fluidos de desechos de algún proceso industrial, previo o posterior al tratamiento ambiental.. Si el fluido ocupa la totalidad de una sección cerrada se considera flujo en tubería. En estos casos normalmente la impulsión del flujo se hace por diferencias de presión. Recíprocamente los canales manejan el trasporte de flujo a través de la acción de las fuerzas másicas. El trasporte se hace por pendiente, utilizando como acción impulsora a la gravedad, en general la conducción se realiza a velocidad constante, estableciéndose un equilibrio entre las fuerzas másicas debidas a la gravedad y las fuerzas de fricción viscosa aplicadas sobre la superficie de deslizamiento o cauce. 14.1b Repaso de conceptos preliminares
A partir de la ecuación de Bernuolli, expresada en la forma:
CtezgVp=++ 2
21
ρ [14.1.1]
dividiendo m.a.m por g , [aceleración de la gravedad], y recordando que ρ g = γ ,[peso específico], obtenemos la segunda forma usual de la misma.
. 2
2
ctezg
Vp=++γ [14.1.2]
Observamos que las unidades de cada término de esta última están expresadas en metros [m], con lo cual,
podríamos expresar esta unidad como: )(Peso
EnergíaN
Nm=
⋅ sin variar nada.
En otras palabras, las alturas en la ecuación de Bernuolli en su segunda forma, son representativas de la “Energía por unidad de peso del fluido”, que circula por un punto de cualquier línea de corriente, mientras que expresada en la forma [14.1.1], las unidades son
⎥⎦
⎤⎢⎣
⎡Kg
mN. , o sea “Energía por unidad de masa del
fluido” la Ecuación de Bernuolii, admite también una tercera forma de expresión:
.21 2 ctezgVp =++ ρρ [14.1.3]
En ella, se visualiza más fácilmente que los términos ahora representan Energías potenciales de presión, Energía Cinética y Energía potencial gravitatoria respectivamente, todas en unidades reducibles a:
⎥⎦⎤
⎢⎣⎡ ⋅
=⎥⎦
⎤⎢⎣
⎡⋅ 323 m
mNmseg
mmkg
o “energía por unidad de volumen del fluido que circula”.
En cualquiera de sus tres formas, la Ecuación de Bernuolli, representa un caso particular de la Ecuación de Energía para un flujo sin fricción, y sin intercambio de energía en forma de calor y trabajo, entre dos puntos esta suma es una constante o sea una condición de equi-energía independientemente de la evolución del flujo.

FUNDAMENTOS DE MECANICA DE FLUIDOS_Ing._Jorge Rosasco
Mod 14 Canales. (version preliminar)
2
14.2 Definición de radio hidráulico y profundidad media. Cuando se tratan problemas con canales de forma irregular o con tuberías con llenado parcial de secciones diferentes a la circular y al efecto de cuantizar diversas magnitudes se establecen las definiciones útiles de Radio Hidráulico, Perímetro mojado y Profundidad media. En la figura siguiente, se da la sección en corte de un canal natural irregular, y se definen los siguientes elementos:
Fig.14.2_.1 A: Sección del cauce en [m2]. Es la sección comprendida entre el espejo de fluido o superficie libre y el cauce o la base natural donde circula el flujo. p : Perímetro mojado. [m]. Es el perímetro de la sección en la línea del cauce, sin considerar la línea del espejo que cerraría el perímetro total. Es decir hay que diferenciar perímetro mojado de perímetro total. B : Ancho del espejo líquido [m] para cada sección.. Radio Hidráulico R = A / p Profundidad media Hm = A / B Fig. 14.2_2 En la figura Fig. 14.2_2 se da la nomenclatura adicional para los canales artificiales, en este caso de sección trapezoidal. B: ancho del espejo b: base de fondo.
φ: ángulo de talud. hatg =→ ϕ

FUNDAMENTOS DE MECANICA DE FLUIDOS_Ing._Jorge Rosasco
Mod 14 Canales. (version preliminar)
3
Como veremos más adelante en este Módulo, los canales de sección trapezoidal son los más usuales en las construcciones, porque aúnan bastante eficiencia con posibilidades de optimización de forma respecto a la facilidad de su construcción. El canal rectangular, lo consideramos un caso particular de os canales trapezoidales, con φ = 0, a = 0. Ya sea que se trate de canales naturales o artificiales las características geométricas de la sección longitudinal entre dos secciones transversales se observan en el diagrama siguiente: Fig.14.2_3 en esta vista se define nuevas variables: θ: ángulo del lecho promediadas la irregularidades, respecto a una referencia horizontal, la línea de solera no debe confundirse con la línea de cauce, ya que responden a secciones distintas,
i: pendiente, definida como θθ tansin ≈=ΔΔ
=lzi
ya que habitualmente los ángulos de pendiente son pequeños 14.3.- Definición de Número de Reynolds en canales. Si bien los canales tienen una superficie libre, no se los considera flujos desarrollados, sino cerrados o confinados, por lo cual los regímenes laminar – turbulento se los define con Re < 2.300, laminar y Re > 4.000 turbulento. Para un flujo que circula a través de tubería circular, que es un flujo confinado, el Nº de Reynolds lo definíamos como:
μρVD
=Re
Donde V es la velocidad media y D el diámetro interior, ya sea régimen laminar o turbulento. Con la definición de Radio Hidráulico que hemos dado, tendríamos para el caso de una tubería de sección circular:
RDDDD
pAR 4
4/
4
2=⇒=== π
π
Para un canal y para una sección cualquiera del mismo entonces definimos:

FUNDAMENTOS DE MECANICA DE FLUIDOS_Ing._Jorge Rosasco
Mod 14 Canales. (version preliminar)
4
μρ ]4[
ReRV
= [14.3.1]
Observe que en la ecuación [14.3.1], R representa el radio hidráulico y no el radio de una tubería., esta última expresión es fácil de deducir entonces a partir de aplicar la definición de radio hidráulico a una sección circular, y puede usarse ahora con secciones irregulares tales como los cursos de agua naturales, para calcular el Re en el canal, calculando el radio hidráulico a través de R = A/p. 14.3.-.Piezómetro estático y dinámico:
Un piezómetro estático es un tubo de pequeño diámetro (aunque no capilar), que se coloca dentro de una vena fluida en posición normal a la superficie de referencia de nivel horizontal. El piezómetro puede contener el mismo fluido que está circulando por el conducto, u otro diferente de referencia como mercurio. Si en una tubería cerrada y llena de líquido impulsado por presión, se instala un piezómetro en distintos puntos que sigan la dirección de la línea central de corriente, como se indica en la Fig. 14.3_1, la altura que alcanza el nivel de líquido en el tubo en los distintos puntos de esta línea es producida por la energía de presión y nos define un nivel que se llama “nivel piezométrico”. Como el tubo está abierto a la atmósfera, es evidente que:
hgγp
hphhgpp MMat =→==− )( γ ,
es decir que la presión expresada por la línea piezométrica es la presión manométrica
)( atM ppp −= . pM = presión manométrica. p = presión absoluta estática del flujo en la posición de control. pat = presión atmosférica γhg = peso específico del mercurio. Colocando el tubo en distintos lugares de la línea de corriente central obtendremos el lugar geométrico llamado “línea de niveles piezométricos” . El piezómetro puede funcionar con cualquier líquido en su interior , normalmente se usa mercurio ya que debido a su gran peso específico las alturas a medir son mas pequeñas y por tanto la longitud del piezómetro.
Fig.14.3_1

FUNDAMENTOS DE MECANICA DE FLUIDOS_Ing._Jorge Rosasco
Mod 14 Canales. (version preliminar)
5
Si la línea de niveles piezométricos se toma desde la referencia de posición absoluta, el lugar geométrico de la línea piezométrica:
)()(hg
pzhz M
γ+=+
será representativa de la energía total de presión más la energía potencial por unidad de peso en los diversos puntos de la línea de corriente central. Fig.14.3_2 En la Fig. 14.3_2 se da una idea algo burda de por que el piezómetro estático “no ve” la componente dinámica de la presión, al quedar apantallado el punto de medición media. Si ahora colocamos un “piezómetro dinámico”, según se indica en la Fig. 14.3_3, o tubo Pitot básico, el nivel de dicho tubo aumentará ya que censará sumada a la presión estática, la acción de la “presión dinámica”
⎥⎦
⎤⎢⎣
⎡+=⎥
⎦
⎤⎢⎣
⎡+
gV
hg
pVhg
p MM
2
2
21 2 γ
γρ
γ
de manera que en este caso h está censando la presión total, o sea además de la presión estática se suma una columna h’ de la energía cinética del fluido, donde:
gV h' h
gV
2 '
2
2 2
=→⋅= γγ
Fig.14.3_3

FUNDAMENTOS DE MECANICA DE FLUIDOS_Ing._Jorge Rosasco
Mod 14 Canales. (version preliminar)
6
Así la cota de la línea de carga hidrodinámica, que representa la suma de las 3 energías, será una línea horizontal para flujo ideal y por tanto sin pérdidas en el conducto, ya que resume la ecuación de Bernuolli y por tanto una línea de equi-energía para cualquier posición.
.2
2
ctehg
Vp=++γ
Para líquidos reales, la línea de carga hidrodinámica no se mantendrá constante sino que tendrá una ligera pendiente negativa corriente abajo debido a que parte de la energía total se pierde en rozamiento (pérdidas primarias de fricción y pérdidas secundarias por accesorios si los hubiera, en este caso un cono). 14.4.-. Canales y cursos de agua: Ya dijimos que los canales y cursos de agua son cauces libres, llamados así porque sobre ellos actúa solamente la presión exterior atmosférica y la gravedad. Es fácil imaginar que si el espejo de agua está expuesto a la atmósfera, la línea de nivel piezométrico coincide con la superficie libre de líquido, ya que la presión que indicaría un piezómetro estático que contenga igual fluido que el canal, estabilizaría su marcación sobre el nivel del canal (vasos comunicantes) y además si el líquido está circulando, es porque hay un ángulo de declive respecto a la horizontal α . Si hay un declive en flujo ideal sería fácil observar que la velocidad debería ir en aumento corriente abajo, sin embargo, es común observar a los canales con velocidad media de la corriente constante debido al equilibrio con la fricción interna, la diferencia de energía se consume en el roce sobre las paredes. Esto hace que el flujo sea en los casos reales permanente al menos en tramos no muy prolongados, y en particular si no existen saltos ni resaltos. Fig.14.4_1 La Fig. 14.4_1, representa una sección longitudinal del curso de agua, en el mismo se ha dibujado la línea de carga ideal, horizontal y sin pérdida de energía, pero si la velocidad es uniforme, la línea de carga hidrodinámica real sería paralela al curso de agua, y paralela a la línea piezométrica estática ya que ambas manifiestan la misma pérdida de energía .

FUNDAMENTOS DE MECANICA DE FLUIDOS_Ing._Jorge Rosasco
Mod 14 Canales. (version preliminar)
7
Para un líquido real que circule por un cauce libre recto, la constancia que supone la igualdad de velocidades iniciales y finales, motiva que no aparezca una diferencial de presión entre las secciones estudiadas y el equilibrio que impone la condición de aceleración nula sería:
.0 cteVa =→= Por lo cual hay equilibrio de fuerzas que actuantes )0( =∑F , entre la componente axial del peso de la masa líquida en la sección y la resistencia a la circulación sobre la superficie lateral de contacto de las tensiones tangenciales, como se indica en la Fig.14.4_2 siguiente: Fig.14.4_2 Las magnitudes de las fuerzas están dadas por unidad de ancho del canal. Si tomamos en referencia a la Fig. 14.4_2 un volumen de control definido por los límites entre la secciones 1 y 2, el planteo de la Ecuación Integral de Cantidad de Movimiento al mismo será:
∫∫∑→→→→
∗+∂∂
==SCVC
dAVVdvVt
FiDtDP )(ρρ [14.4.1]
Aplicada en la dirección de la corriente del canal, resulta que para flujo permanente se nos irá el término de la derivada parcial, la sumatoria de fuerzas a la izquierda está compuesta por la diferencia de presiones aplicada al área transversal, el peso de líquido aplicado en la dirección del movimiento y la fuerza necesaria para que el volumen de control se mantenga quieto, o en movimiento rectilíneo y uniforme con respecto al sistema de referencia, que es numéricamente igual al rozamiento, será:
pLoLAApp Δ−Δ+− τθγ sin)21( Como la distribución de presiones es la misma sobre las secciones 1 y 2 el primer término se anula, quedando:
pLoLA Δ−Δ τθγ sin

FUNDAMENTOS DE MECANICA DE FLUIDOS_Ing._Jorge Rosasco
Mod 14 Canales. (version preliminar)
8
El segundo miembro de la [14.4.1] es:
)2122( VVA −ρ Que también se anula en virtud de la igualdad de velocidades de flujo a la entrada y salida del volumen de control. Finalmente entonces la igualdad quedará:
pLoLA Δ=Δ τθγ sin como: zL Δ=Δ θsin queda
pLozA Δ=Δ τγ Y tomando en cuenta la definición que hemos dado de pendiente y radio hidráulico:
Rio γτ = [14.4.2] Por otra parte, nosotros sabemos del estudio de capa límite, que dada la longitud del canal, el flujo permanente y uniforme será necesariamente turbulento y que la resistencia al movimiento de un cuerpo en flujo turbulento viene dado, en general, por la ley de Rayleigh:
SVCF DR2
21 ρ= [14.4.3]
En este caso el coeficiente que en general esta dado por la sumatoria del componente de presión o coeficiente de arrastre de forma y la componente de fricción o arrastre de fricción:
CvCpCD += En el estudio de los canales y cursos libres de agua solamente tendremos la componente de fricción y en el caso de los canales es común reemplazar la nomenclatura del coeficiente de arrastre CV por λ ;y tomar como superficie de referencia la superficie lateral: también es fácil ver que como la tensión es expresable como SFR /0 =τ siendo S la superficie lateral, de contacto del fluido, entonces para la expresión [14.4.3] queda:
22
221 V
gVo
γλρλτ == [14.4.4]
Debe notarse que esta velocidad debe considerarse como el promedio de las velocidades para cada sección, con el concepto de promedio de velocidades ya visto. Vinculando los resultados [14.4.2] y [14.4.4] queda finalmente:
igR
VLz
gRV
Lz
==ΔΔ
→⋅
=ΔΔ
2
2
22 λγλγ [14.4.5]

FUNDAMENTOS DE MECANICA DE FLUIDOS_Ing._Jorge Rosasco
Mod 14 Canales. (version preliminar)
9
Como Δz está expresado en [m] es posible también considerarlo como una pérdida de energía por
unidad de peso [N
mN ⋅ ] con lo cual i representa una pérdida de energía por unidad de peso y longitud::
→=Rg
Vi
2
2λ
iRcRigiRgV ===λλ
22 [14.4.5b]
para flujo uniforme, y como surge de su definición i es también la pendiente del canal. La ecuación [14.4.5b] se conoce como “ Fórmula de Chezy”. La estimación del coeficiente constante c se hace experimentalmente y se han obtenido resultados a través de dos criterios, el primero se denomina fórmula de “Ganguillet Kutter”.
Rni
inc
)]/00155.0(23[1
)/00155.0()/1(23
++
++=
donde los valores de n están dados en la Tabla 1 siguiente en función de los diferentes materiales con que puede construirse el lecho y solera del canal, el segundo criterio se denomina: 14.5 Criterio de Manning. Para el movimiento permanente uniforme y por tanto de velocidad constante para un canal artificial prismático abierto, se utiliza con mucha frecuencia para la aproximación de c la fórmula de Manning.
6/1823.0 Rn
c = [14.5.1]
donde n es el mismo coeficiente que para la fórmula “Ganguillet Kutter” referido a una suerte de coeficiente de rugosidad del material que constituye la pared interior del canal, los coeficientes n, se dan la Tabla 1 siguiente, por otra parte, reemplazando el valor dado de c en la fórmula de velocidad media del canal, [14.4.5b] queda:
2/13/2823.0 iRn
V = [14.5.2]
El coeficiente n se considera como un coeficiente absoluto de resistencia, pero realmente depende también del tamaño y la geometría de la sección transversal del canal por lo que los dados en la Tabla 1 deben considerarse una primera aproximación. También es importante tener en cuenta que es necesario trabajar en MKS para obtener validez en los resultados, ya que los coeficientes están dados para este sistema.

FUNDAMENTOS DE MECANICA DE FLUIDOS_Ing._Jorge Rosasco
Mod 14 Canales. (version preliminar)
10
Cuando a la ecuación [14.5.2] la afectamos por la sección recta del canal , de área A obtenemos el caudal nominal.
2/13/2823.0 iRAn
Q = [14.5.3]
[]

FUNDAMENTOS DE MECANICA DE FLUIDOS_Ing._Jorge Rosasco
Mod 14 Canales. (version preliminar)
11
Tabla 1

FUNDAMENTOS DE MECANICA DE FLUIDOS_Ing._Jorge Rosasco
Mod 14 Canales. (version preliminar)
12
Ejemplo 1. Determinar el caudal de un canal de sección trapezoidal indicado en la figura siguiente, siendo el ancho del fondo b = 2.40m inclinación de los laterales 45° , la profundidad del agua y = 1.8m y la pendiente i = 0.001 (o 1 metro cada 1000 metros) . El material del canal es hormigón bien terminado. (Pendiente: i = 1 metro cada 1000 metros) Resolución: de la tabla tomamos n = 0.01 el área de la sección vale:: A = [(B +b) h ] / 2 = (6 + 2.4) 1.8 / 2 = 2.56 m2 el perímetro mojado es: p = 2.4 + 2 √ 2 . 1.8 = 7.5 m sustituyendo en la ecuación [14.5.3]:
segmiRAn
Q /38.192/1)01.0.(3/2
50.756.7.56.7
01.0823.02/13/2823.0
=⎟⎠⎞
⎜⎝⎛==
donde se tomó radio hidráulico R = A / p Ejemplo 2 Que profundidad requerirá un canal rectangular a construirse de madera cepillada, de ancho de base 1.5 m, para establecer un caudal de 4 m3 / seg y con una pendiente de solera de i = 0.002.

FUNDAMENTOS DE MECANICA DE FLUIDOS_Ing._Jorge Rosasco
Mod 14 Canales. (version preliminar)
13
Resolución: si la profundidad es y , el área de la sección será: A = 1.5 y perímetro mojado: p = 1.5 + 2y y de la tabla: n = 0.01 Sustituyendo en la ecuación [15.5.3]:
== 2/13/2823.0 iRAn
Q
queda: 2/1)002.0(
3/2
25.15.1
5.1.01.0
823.04 ⎟⎟⎠
⎞⎜⎜⎝
⎛+
=y
yy
operando, queda:
725.03/2
33.11=⎟⎟
⎠
⎞⎜⎜⎝
⎛+ y
yy
esta es una ecuación trascendente, la podemos resolver aplicando logaritmación o por tanteos, por ejemplo: para y = 1.1 f(y) = 0.643 para y = 1.2 f(y) = 0.717 podemos aceptar este valor como válido, entonces; y = 1.2 m 14.6. Variaciones de velocidad en vertical para los cursos de agua naturales. En los canales artificiales los perfiles de velocidad se apartan un poco de lo obtenido para derrame de flujo laminar en canal plano delgado según vimos en el Módulo 12, en estos casos cuando el liquido que circula es de baja viscosidad como el agua (del orden de magnitud de 1 Cp) el flujo es turbulento. La velocidad máxima se presenta por debajo del nivel del espejo en posiciones que pueden variar de 0.05 a 0.25 de la profundidad máxima; y la velocidad media aproximada se ubica con una medición a una profundidad de 0.6 de la profundidad máxima.

FUNDAMENTOS DE MECANICA DE FLUIDOS_Ing._Jorge Rosasco
Mod 14 Canales. (version preliminar)
14
Fig.14.6_1 El procedimiento para el establecimiento aproximado del perfil en un canal artificial con flujo turbulento sería encontrar la cota a la que se produce la velocidad máxima y cuantificar la misma, una vez obtenido estos datos, dibujar una parábola de eje horizontal con vértice en el punto de la profundidad y la velocidad máxima, y luego unir con el punto de velocidad cero del fondo, la construcción de la parábola puede darnos una velocidad en el espejo algo menor a la teórica, obteniendo una velocidad menor a la máxima en la intersección al espejo. Cuando el canal es natural, en general, la velocidad, o el perfil de velocidades varía de una vertical a otra de la misma sección, y con patrones de distribución de velocidad de curvas irregulares (Fig.14.6_2 derecha). Como además la longitud de los canales y cursos de agua es mayor a la longitud de transición de flujos laminar a turbulento, aun para velocidades pequeñas, el flujo en los canales los consideramos turbulentos, y tendremos por tanto en las proximidades del fondo velocidades comparables a la velocidad media (recordar perfil para flujo turbulento en conductos). En la figura siguiente Fig.14.6_2 , a la izquierda se observa un corte del curso natural y la representación de una línea que une los puntos de igual velocidad, estas líneas se denominan “isotacas”. Para la determinación de las mismas es necesario la realización de muchos diagramas de distribución o perfiles de velocidad vertical en diferentes cortes dentro de cada sección, en la figura se han indicado tres cortes, y para cada uno se requerirían al menos 10 mediciones en distintos puntos de la vertical , por lo cual la tarea es bastante complicada. Para cada vertical las velocidades notables son las siguientes:
- Vs: velocidad en superficie. - V1 : velocidad máxima __ - V: velocidad media - Vpf: velocidad próxima al fondo.

FUNDAMENTOS DE MECANICA DE FLUIDOS_Ing._Jorge Rosasco
Mod 14 Canales. (version preliminar)
15
En general podemos, después de efectuar las mediciones, establecer un perfil de velocidad y obtener la Vmax de esa vertical a partir de:
h
dhVniVdhVnhiV
h
h . 0
__
0
__ ∫∫ =→=
como esta fórmula anterior se aplica a la obtención de las velocidades medias de cada vertical , la velocidad media de la sección, será el promedio de las mediciones individuales:
verticalesden
iVV
_______
°= ∑
en nuestro esquema, n = 3
Fig.14.6_2
14.7 Canales óptimos. Para un canal a proyectar, Q, i, n son datos del proyecto, por lo que podemos poner la ecuación de caudal con el c del criterio de Manning:
2/13/2823.0 iRAn
Q = [14.7.1]
Que lo podemos escribir en la forma:
3/2823.02/1
RAi
nQ= [14.7.1b]
El primer miembro de la anterior constituye por tanto una constante del proyecto que llamaremos C mayúscula.
3/2
3/5
3/2
3/23/2 →===pA
p
AARAC

FUNDAMENTOS DE MECANICA DE FLUIDOS_Ing._Jorge Rosasco
Mod 14 Canales. (version preliminar)
16
5/2
15/25/3
pCpCA == [14.7.2] esta ecuación relaciona a través del criterio de Manning, A , p y el coeficiente C1 . los coeficientes C y C1 dependen del caudal, pendiente y coeficiente de rugosidad de la superficie interior. El perímetro óptimo se obtiene para un área dada A, cuando el perímetro es mínimo, por eso la sección hidráulica óptima para un canal abierto, de todas las posibles, es la semi-circular, pero una sección semi circular es difícil de construir, por lo cual cuando por razones económicas de construcción se eligen formas más simples de construir, como la rectangular o la trapezoidal, el perímetro p debe ser el mínimo para cada forma. 14.7a.- Caso 1 Sección rectangular. Aplicamos para este caso, llamando A al area , y a la altura del espejo, y b al ancho de la base Fig.14.7_1:
ybpybA
2+==
Ahora aplicamos despejando b de la segunda y reemplazando en la primera:
yypA )2( −= Reemplazando en la [14.7.2], queda:
5/21)2( pCyyp =−
Estando todo en función del perímetro, ahora aplicamos mínimos derivando respecto de y en ambos miembros e igualando a cero, la anterior.
)(5/315
2)2()2(dydp
pCypydydp −=−+−
Haciendo, dp/dy = 0, en la anterior, queda:
→=−− 02)2( yyp
yp 4= que es la relación funcional de p con y. Como era p = b+2y, queda que finalmente la relación de area óptima es:
ybyyb 242 =→=+

FUNDAMENTOS DE MECANICA DE FLUIDOS_Ing._Jorge Rosasco
Mod 14 Canales. (version preliminar)
17
Fig.14.7_1 Como procesamos ahora este dato ? Nosotros sabemos a partir de los resultados obtenidos que: b = 2y, por lo tanto reemplazando en las expresiones de área y perímetro:
yybpyybA
42
22=+=
==
Por lo que el radio hidráulico será:
24
22 yy
ypAR ===
Reemplazando este resultado en función de los datos:
3/2]2
][22[]2/1823.0[2/13/2823.0 yyin
iRAn
Q ==
Lo que nos permite calcular y a partir de los datos, y finalmente b=2y. 14.7b.- Caso 2 Sección trapezoidal. En referencia a la sección trapezoidal de un canal artificial genérico, Fig. 14.7_2, podemos definir relaciones con la pendiente del talud:
212)(122 my
yayyaL
myatg
+=+=+=
==φ
Fig.14.7_2

FUNDAMENTOS DE MECANICA DE FLUIDOS_Ing._Jorge Rosasco
Mod 14 Canales. (version preliminar)
18
Entonces fácilmente expresamos el área y el perímetro mojado:
212
22
mybp
ymybtgyybyaybA
++=
+=+=+= φ
Igual que antes despejamos b de la segunda y lo reemplazamos en la primera, quedando la relación entre el área y el perímetro y tomando en cuenta la expresión [14.7.2].:
2)212(212 ymymypmyybA ++−=++=
5/212)212( pCymymyp =++− [14.7.3] tomando en cuenta que p = f (y,m), a la anterior hay que aplicar la condición de mínimo al perímetro mojado dos veces, al efecto de hacer máximo al radio hidráulico (maxima área con mínimo perimetro para un tipo de sección dada) o sea: dp/dy = 0, y dp/dm = 0 aplicamos la primera, dp/dy = 0, derivamos en ambos miembros la anterior:
)(5/315
22)212()212(dydp
pCymmdydp
ymyp −=++−++−
Ahora aplicamos que la condición de mínimos es dp/dy=0, quedando:
02)21(4(
02)21(2)212(
=++−
→=++−+−
ymmyp
ymmymyp
De donde deducimos la relación funcional óptima de p con y para el canal exagonal es:
ymmyp 2)21(4 −+= [14.7.2] aplicamos la segunda condición de mínimo a la [14.7.3] , dp/dm = 0, derivando en ambos miembros.
)(5/352
1222/1)21(
2122)(
dmdppCymmy
dmdpy −=+−+−
aplicando dp/dm = 0 a la anterior, queda:
0222/1)21(2 =+−+− ymmy Dividiendo por y2 en ambos miembros, queda:
→=+−+− 0122/1)21( mm
→=+
1)21(
2
m
m →=→+= 123)21(24 mmm
31
=m [14.7.3]

FUNDAMENTOS DE MECANICA DE FLUIDOS_Ing._Jorge Rosasco
Mod 14 Canales. (version preliminar)
19
como era por definición:
myatg ==φ
Deducimos que la condición de óptimo para pendiente del talud de la sección exagonal es:
ª60=φ Reemplazamos ahora el valor óptimo de m dado por [14.7.3] en [14.7.2] obteniendo
yyyyp 32)2(3
33
23
24 ==−=
como teníamos de la definición de perímetro para sección exagonal:
212212 mypbmybp +−=→++= Reemplazando los valores obtenidos de p y m, queda finalmente:
3332
32)
32(2)
33(2 pyyyyb ===−=
En conclusión la sección exagonal optima es la que tiene un talud de 60ª y un desarrollo de las paredes oblicuas con L = b. o sea una sección semi – exagonal Fig:14.7_3.
Fig.14.7_3
Observe que las secciones óptimas siempre aproximan “lo más que pueden” al perfil semi – circular. Otra cosa interesante de observar, es que al igual que en el caso de la sección rectangular, el radio hidráulico vale, reemplazando los valores obtenidos:
232
23
323
232332
3322
31
23
322
yy
yR
ybp
yyyyymybyA
==
==
=+=+=+=
Vemos entonces que el valor R = y/2 es común para todas las secciones óptimas. Para aplicar esto a un diseño concreto de un canal de sección exagonal, nosotros dispondríamos como datos, el caudal a transportar, la pendiente del terreno, y el coeficiente n del material del revestimiento interior, entonces, aplicando la [14.7.1]

FUNDAMENTOS DE MECANICA DE FLUIDOS_Ing._Jorge Rosasco
Mod 14 Canales. (version preliminar)
20
2/13/2823.0 iRAn
Q =
Reemplazando los valores obtenidos para óptimo.
2/13/2)
2(23823.0 iyy
nQ =
Esta ecuación permite calcular y así como también yb3
32=
Cabe aclarar que en algunos casos si se trata de mejorar un canal natural o hacer un canal horadando y utilizando como paredes un terreno natural, en este caso los valores de m = tg φ deberán tomarse como una constante que se obtiene a partir de la Tabla 2 siguiente, para los distintos sustratos:
Tabla 2 En los casos de ángulo menor que 60ª resulta más costoso hacer en un material duro el ángulo ideal de 60º, que usar el máximo indicado para que la pared no se derrumbe, y si el material natural es más blando el ángulo de talud deberá ser mayor que 60º para evitar el erosionado de las paredes laterales, el óptimo en estos casos y para canal exagonal, se obtiene aplicando solamente la primera condición de mínimo. []
Material del sustrato Ángulo φ tomado desde la vertical Roca firme 0° Roca compacta 15° Roca caliza 25° Roca sedimentaria 36° Tierra Vegetal 45° Tierra Arcillosa 56° Suelo arenoso 68° Arena fina suelta 71°

FUNDAMENTOS DE MECANICA DE FLUIDOS_Ing_.Jorge Rosasco.
Mod. 15 Vertederos (versión preliminar)
1
15 VERTEDEROS. Y DERRAME POR GRANDES ORIFICIOS. 15.1 Análisis General .- Vertederos de Aforo rectangular. Los vertederos consisten en una pared o dique para represar un canal que está construido en tramos con o sin pendiente, (Fig.15._1b) o sea horizontal o bien para represar agua de un dique con tres propósitos específicos: a.- Poder efectuar una medición simple del caudal del canal. natural o artificial o del aliviadero de una presa. b.- Poder regular el caudal en forma independiente de la pendiente del terreno. c.- Poder regular el nivel en el canal o presa. Fig.15.1_1a Por ejemplo el caso (Fig.15._1a) se puede implementar en un canal natural represando el cauce con una placa que ocupe todo el ancho del canal y que la misma posea un orificio cerrado o bien una escotadura abierta, denominado vertedero, en este último csao naturalmente se forma un embalse corriente arriba con línea de espejo natural horizontal, que crece en altura hasta que se equilibran el caudal de entrada con el de salida a través de la escotadura u orificio, de esta manera como veremos resulta simple la determinación del caudal y la velocidad media de la corriente aguas abajo. Fig.15.1_1b El caso (Fig.15._1b) se implementa con una serie de vertederos, de terrazas horizontales que a través de escotaduras u orificios calibrados, permiten adaptar un caudal definido a una pendiente natural, por ejemplo adaptar una pendiente alta con un caudal bajo. Finalmente es fácil ver que con este procedimiento podríamos también establecer un máximo para la altura de una presa, cuando ese valor alcanza esa altura crítica, comienza el espejo a derramarse por el vertedero que en este caso se denomina aliviadero, y de esta manera se protege la turbomaquinaria de un exceso de nivel o altura de presión.

FUNDAMENTOS DE MECANICA DE FLUIDOS_Ing_.Jorge Rosasco.
Mod. 15 Vertederos (versión preliminar)
2
Básicamente el vertedero como dijimos, consiste en una obstrucción construida en el canal horizontal sin pendiente (Fig.15.1_2) que consiste básicamente en una placa vertical con una escotadura, que obliga al líquido a crear un embalse y estancarse aguas arriba, aumentando su nivel una cantidad h sobre la base de la garganta del vertedero, que será función del caudal entrante aguas arriba y del caudal saliente a través del vertedero. Cuanto menor sea el área de la garganta mayor será el desnivel represado, produciendo luego un derrame a través del orificio o aforo del vertedero para un caudal definido de diseño. La medida de la altura del nivel h desde la garganta del aforo hasta el espejo de agua, se efectúa corriente arriba suficientemente lejos del vertedero, a través de un vaso comunicante graduado, con el cero de la escala coincidente con la cota de la garganta, y esto permite determinar el caudal del canal como veremos luego. Recíprocamente, si la vertiente que ingresa al canal posee un caudal dado, el diseño adecuado del vertedero permitirá determinar el nivel h en la presa o canal. El alumno puede apreciar en la figura, que todo el canal artificial por su definición está desarrollado con escalonamientos sin pendientes, los escalonamientos van copiando el perfil del terreno con terrazas horizontales, el caudal ingresa al canal proveniente de un canal natural o pueden ser efluentes de una planta etc. El líquido se va trasladando por el esquema de embalses sobrepasados, por tanto una pequeña pendiente de curso natural i de izquierda a derecha en concordancia con el sentido del declive del terreno, puede ser resuelta con varios escalonamientos de embalse horizontal, y también una pendiente de terreno pronunciada puede resolverse con escalonamientos que permitan regular el caudal como si la pendiente natural fuera menor. Algunos vertederos se construyen en chapas de acero de manera que la lámina de fluido saliente de un nivel, toque solamente en un filo de ella (vertederos de pared delgada), otros en mampostería en los cuales la lámina de salida toca en cierta porción de la cresta que es una pared horizontal con bordes redondeados, se llaman vertederos de pared gruesa. Típicamente cuando el espesor de la placa de aforo he 5.0≤ se denominan de pared delgada y de pared gruesa cuando he 5.0> .
Fig.15.1_2
El vertedero debe diseñarse de manera de evitar la contracción longitudinal y transversal de la lámina de agua. La contracción longitudinal se produce cuando el ancho de la garganta es igual que el ancho del canal (b = B), entonces se forma una región de aire atrapado debajo de la lengua de agua, es una zona donde el agua que se vierte va barriendo las moléculas de aire atrapadas y va creando lentamente un vacío parcial, lo que hace que la lámina tienda a acercarse y aplastarse contra la pared vertical, dando lugar a la

FUNDAMENTOS DE MECANICA DE FLUIDOS_Ing_.Jorge Rosasco.
Mod. 15 Vertederos (versión preliminar)
3
denominada lámina deprimida o ahogada lo que causa un incremento de caudal y descenso del nivel regulado, por lo cual es un fenómeno no deseado del diseño. La ventilación consiste solamente de un tubo que conecte esta área encerrada con la atmósfera, entonces las líneas de corriente de la caída de agua o efluente, son o tienden a ser aproximadamente paralelas, esto se logra entonces, ventilando la zona que queda atrapada entre la región inferior de la lámina, la pared del vertedero y la pileta inferior. La contracción transversal se produce cuando el ancho de la garganta es menor que el ancho del canal (b < B), la lámina en su salida tiende a contraerse en el sentido del ancho, (ver Fig.15.2_1), esto se puede corregir aunque no totalmente mejorando el diseño de las aristas de contacto con el agua..
Fig.15.1_3
Para obtener la ecuación que permite calcular el de caudal, partimos del análisis de la Fig. 15.1_3, aplicando la Ecuación..de Bernuolli que nos dará una adecuada primera aproximación, para flujos de baja viscosidad (del orden de 1 cp) como el agua. Los factores constructivos que producen el apartamiento de los resultados cuando se aplica la Ec. de Bernuolli, son:
Patrones de flujo 3D. Resistencia a la fricción Turbulencia.
Observamos que la Ecuación de Continuidad puede aplicarse para determinar las velocidades relativas del escurrimiento, entre las áreas del canal lejos del vertedero y próximo a él entre las secciones respectivas A1 = HB y A2= hb, la zona de flujo detenido u ocluido en la proximidad del vertedero, ayuda a una transición suave en flujo permanente entre ambas secciones, (región punteada del dibujo) en la figura se ha representado la velocidad media V1 lejos del vertedero, y dado que A2 << A1 por la ecuación de continuidad, V1 resultará pequeña en comparación con V2, podría ser despreciada en primera aproximación cuando C sea del orden de C =10 h (ver Fig. 15.1_2). Aplicando la Ecuación de Bernuolli entre los puntos 1 y 2 de la misma línea de corriente, y suponiendo que no despreciamos en general la velocidad en 1, queda tomando como nivel de referencia la horizontal que pasa por el punto 1:
zona que debe ser ventilada para evitar el colapso de la lámina

FUNDAMENTOS DE MECANICA DE FLUIDOS_Ing_.Jorge Rosasco.
Mod. 15 Vertederos (versión preliminar)
4
2222212
211 hg
Vphg
Vp++=++
γγ
Operando, y teniendo en cuenta que la partícula en 2 está liberada a la atmósfera:
)(2
2202
21 yhhog
Vatpg
Vohatp+−++=++⎥
⎦
⎤⎢⎣
⎡ +γγ
γ
Operando y despejando V2:
)2
21(22
21)(22 gVzg
gVyhgV +=⎥
⎦
⎤⎢⎣
⎡+−= [15.1.1]
Observando la Fig. 15.1_2, podemos escribir también para el diferencial de caudal que pasa por la escotadura en cada nivel z:
Entonces el caudal total que pasa por la escotadura es:
=⎥⎦
⎤⎢⎣
⎡+= ∫ dz
gVzbgQ
h 2/1
2
2120
Esta integral se puede resolver fácilmente por el método de sustitución, llamando:
dzdudzdu
gVzu =→=→⎥
⎦
⎤⎢⎣
⎡+= 1
221 entonces con:
2
212
210
Vhuhz
Vuz
+=→=
=→=
Entonces los límites de integración no habrá que cambiarlos porque el término 2/21V , se va a cancelar al aplicar la regla de Barrow. Reemplazando, entonces queda.
hubgduubgQ
h
02/3
3222/12
0
== ∫
Restituyendo el valor original de u y aplicando la regla de Barrow a la integral, queda finalmente:
⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡−⎥
⎦
⎤⎢⎣
⎡+=
2/3
221
2/3
2212
32
gV
gVhbgQ [15.1.2]
En los casos en que la velocidad V1 corriente arriba puede despreciarse frente a la velocidad de escurrimiento, (c >10 h), queda:
2/395.22/3232 hbhbgQ == [15.1.2b]
)(2 dzbVdQ =

FUNDAMENTOS DE MECANICA DE FLUIDOS_Ing_.Jorge Rosasco.
Mod. 15 Vertederos (versión preliminar)
5
En las ecuaciones anteriores, b es el ancho de garganta del vertedero, la experiencia demuestra que el exponente de h en la expresiones [15.1.2 y 15.1.2b] es correcto, pero el coeficiente (2.95) es demasiado alto con respecto a los resultados empíricos, ya que la pequeña contracción siempre presente y las pérdidas de energía del flujo hacen que al coeficiente teórico haya que afectarlo de una constante kd llamada coeficiente de descarga y que es del orden de 0.62, es decir quedaría para la fórmula de primera aproximación para el caudal real:
2/384.12/3232 hbhbgdkQ ≈= [15.1.3]
estando Q en [m3/seg] y h en [m] 15.2.- Contracción lateral. La lámina de agua o efluente a la salida del vertedero, presenta como dijimos sobre todo cuando b=B y no hay una adecuada ventilación de la zona interior de ella, una contracción longitudinal que produce el fenómeno de lámina deprimida. En el sentido transversal, en particular cuando la abertura del vertedero tiene un tamaño inferior al ancho del canal B, puede presentarse también una contracción transversal que puede apreciarse en la Fig.15.2_1, en la cual el vertedero esta visto en planta, lo que obliga a una nueva corrección empírica de la fórmula de caudal, que se hace restando 0.1 h a cada lado del ancho de la lengua para el ancho b , es decir el caudal corregido quedaría a partir de [15.1.3]: Fig.15.2_1
2/3)1.02(84.1 hhbQ ×−≈ [15.2.1] Ya dijimos y lo reiteramos que la altura h se mide aguas arriba del vertedero a una distancia suficiente para que no influya la construcción del embalse, normalmente con un vaso comunicante ubicado aguas arriba que permita definir bien el nivel de referencia o la altura C de la cresta del vertedero (ver Fig.15.1.2). Cuando la altura de cresta del vertedero C es pequeña ( Fig.15.1_2) comparada con el ancho máximo del canal, el embalse en su totalidad no contendrá una gran masa de agua y por tanto no podremos despreciar el efecto de la de la velocidad de la corriente, corriente arriba V1, lo que contribuye a un aumento en la valor del caudal, y se requiere entonces agregar la corrección debida a velocidad de corriente arriba, es decir a trabajar con la fórmula [15.1.2] que repetimos aquí pero afectada del coeficiente de descarga kd
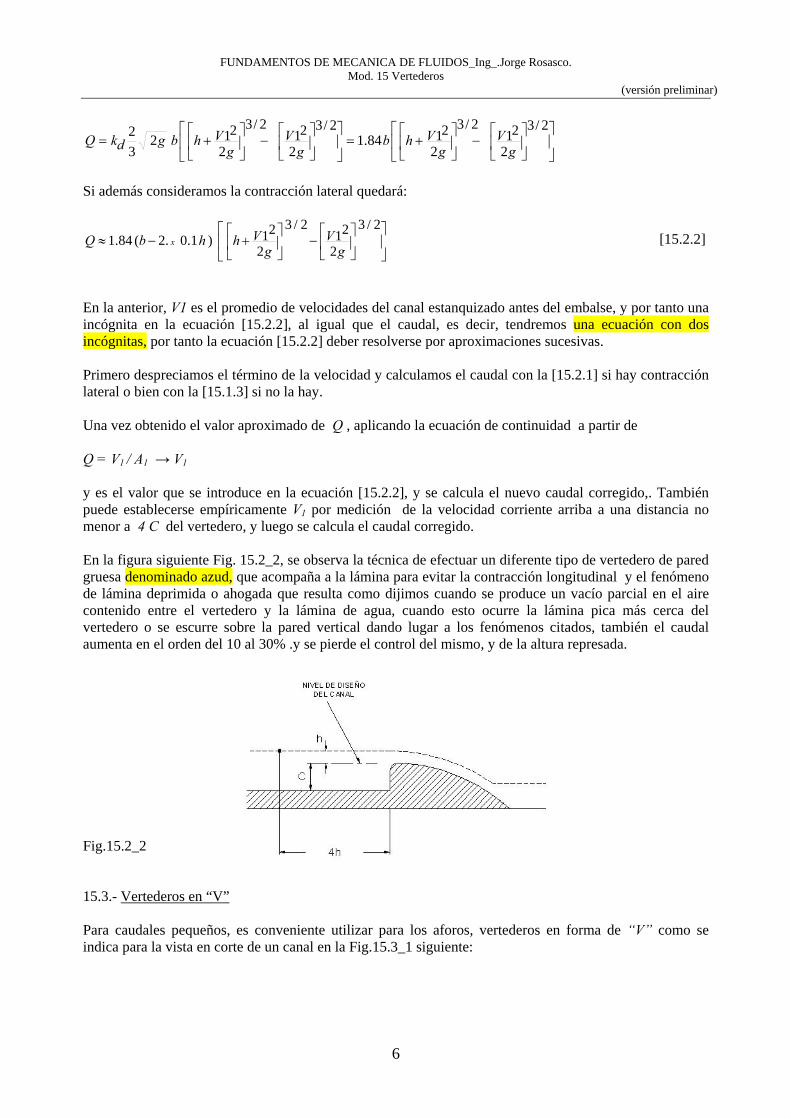
FUNDAMENTOS DE MECANICA DE FLUIDOS_Ing_.Jorge Rosasco.
Mod. 15 Vertederos (versión preliminar)
6
⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡−⎥
⎦
⎤⎢⎣
⎡+=⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡−⎥
⎦
⎤⎢⎣
⎡+=
2/3
221
2/3
22184.1
2/3
221
2/3
2212
32
gV
gVhb
gV
gVhbgdkQ
Si además consideramos la contracción lateral quedará:
⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡−⎥
⎦
⎤⎢⎣
⎡+−≈
2/3
221
2/3
221)1.0.2(84.1
gV
gVhhbQ x [15.2.2]
En la anterior, V1 es el promedio de velocidades del canal estanquizado antes del embalse, y por tanto una incógnita en la ecuación [15.2.2], al igual que el caudal, es decir, tendremos una ecuación con dos incógnitas, por tanto la ecuación [15.2.2] deber resolverse por aproximaciones sucesivas. Primero despreciamos el término de la velocidad y calculamos el caudal con la [15.2.1] si hay contracción lateral o bien con la [15.1.3] si no la hay. Una vez obtenido el valor aproximado de Q , aplicando la ecuación de continuidad a partir de Q = V1 / A1 → V1 y es el valor que se introduce en la ecuación [15.2.2], y se calcula el nuevo caudal corregido,. También puede establecerse empíricamente V1 por medición de la velocidad corriente arriba a una distancia no menor a 4 C del vertedero, y luego se calcula el caudal corregido. En la figura siguiente Fig. 15.2_2, se observa la técnica de efectuar un diferente tipo de vertedero de pared gruesa denominado azud, que acompaña a la lámina para evitar la contracción longitudinal y el fenómeno de lámina deprimida o ahogada que resulta como dijimos cuando se produce un vacío parcial en el aire contenido entre el vertedero y la lámina de agua, cuando esto ocurre la lámina pica más cerca del vertedero o se escurre sobre la pared vertical dando lugar a los fenómenos citados, también el caudal aumenta en el orden del 10 al 30% .y se pierde el control del mismo, y de la altura represada. Fig.15.2_2 15.3.- Vertederos en “V” Para caudales pequeños, es conveniente utilizar para los aforos, vertederos en forma de “V” como se indica para la vista en corte de un canal en la Fig.15.3_1 siguiente:

FUNDAMENTOS DE MECANICA DE FLUIDOS_Ing_.Jorge Rosasco.
Mod. 15 Vertederos (versión preliminar)
7
Fig.15.3_1 Despreciando la contracción de lámina en los dos bordes inclinados, el caudal teórico puede calcularse como: 1.- la velocidad horizontal a la profundidad z es:
zgV 2= 2.- el caudal teórico:
dzxgzdzxvvdAQhh
∫∫ ∫ ===00
2
por triángulos semejantes, x puede relacionarse con z
hLzhx
hL
zhx )( −=→=−
que reemplazado, queda:
⎥⎥⎦
⎤
⎢⎢⎣
⎡−→−=−= ∫ ∫∫∫
h hhh
dzzdzzhhLgdzzhz
hLgdz
hLzhgyQ
0 000
2/32/12 )(2/12)(2
2/318.12/3 2154 2/5 2
154 LhhLgh
hLgQ === [15.3.1]
como:
→=22θtg
hL
2/5
2 2
158 htggQ θ
= [15.3.1b]
Que nos permite relacionar el caudal con el ángulo de la escotadura, en la práctica, el exponente es correcto, pero el coeficiente, en forma similar al caso del aforo rectangular, debe reducirse aprox. un 15%, y se trabaja para ángulo de escotadura de 90º con:

FUNDAMENTOS DE MECANICA DE FLUIDOS_Ing_.Jorge Rosasco.
Mod. 15 Vertederos (versión preliminar)
8
2/52 hLQ = [15.3.2]
en la cual el caudal está en [m3 / seg] , h en [m] y el valor del ángulo de la “V” es 90° .[] Ejemplo 1. Un canal rectangular, de base B = 1.1[m] y altura total H = 1.1[m], es aforado con una placa de ½ pulgada de espesor, con una escotadura en “V” de 90°, midiéndose una altura de aforo de h = 0.25 m , Se pide definir: 1.- Si la placa utilizada para aforar corresponde a un vertedero de pared delgada o gruesa. 2.- El caudal teórico a ser medido, considerando la vena no contraída. 3.- Ídem 2, considerando que hay una pequeña velocidad corriente arriba sobre el espejo de agua. 4.- Cuanto sería la velocidad promedio corriente arriba. Resolución: 1.- Para que se considere vertedero de pared delgada, e ≤ 0.5 h por tanto: e ≤ 0.25 / 2 = 0.125 m , y se cumple ya que ½ pulgada es 0.0127m que la placa aforada corresponde a un vertedero de pared delgada. 2.- Si la vena no está contraída, usamos la ecuación corregida [15.3.] , también observamos a partir de considerar que el aforo es una V de 90º, que la magnitud de L en este caso resulta L = 0,5m por tanto, trabajando con las formulas de los valores nominales:
2/32154 LhgQ = (normal)
2/3)1.0.2(2154 hhLgQ −= (vena contraída lateralmente)
Trabajando con esta última y reemplazando valores:
seglitrosegmQ /64/3064.0 == 3.- Usamos la expresión anterior, pero considerando una altura piezométrica corregida por velocidad.
]5.1)2
21(5.1)2
21[(38.1g
Vg
VhQ −+=
como en primera aproximación, Q = 0.064 m3/seg aplicando la ecuación de continuidad a la entrada:
segmm
segm
entradaAQ
entradaV /052.0221.1/3064.0
1.11.1064.0
====×
por lo cual, los términos cuadráticos de velocidad en la fórmula anterior resultan:
410425.12/21−=gV

FUNDAMENTOS DE MECANICA DE FLUIDOS_Ing_.Jorge Rosasco.
Mod. 15 Vertederos (versión preliminar)
9
vemos entonces del resultado anterior que se pueden despreciar frente al término h, con lo cual el caudal de 64 lit/seg será suficientemente preciso. 4.- La velocidad media de la corriente libre sería V = 0.052 m/seg.. 15.4.- .- Salida de líquidos a través de grandes orificios. Descripción general Ya vimos, en el Mod. 11, que el caudal a través de un orificio pequeño, por debajo del nivel de espejo en un recipiente, se calculaba a partir de la fórmula corregida de Torricelli como:
AghKcKvQ 2= [15.4.1] en la cual: Kc= Ac/A coeficiente de contracción de la vena = área de la vena contraída / área del orificio Kv coeficiente de rozamiento en la pared del orificio. Normalmente se arma el producto: Kd = Kc.Kv que se denomina coeficiente de descarga, con lo cual la fórmula [15.4.1]queda:
AghKdQ 2= [15.4.2] En estas ecuaciones, h es la cota desde el espejo hasta el centro del agujero. Cuando el orificio es grande, se hace evidente que la altura h se hace variable para cada punto del orificio y la velocidad proyectada, varía punto a punto, el caudal elemental estará dado por:
∫=→= dAghdKQdAghdKdQ 2 2 [15.4.3]
15.4..1.- Orificios rectangulares. Supongamos un orificio rectangular como se indica en la Fig.15.4_1, en esta configuración el área elemental vale: dA = b.dh, con lo cual reemplazando en la [14.8.3]:
2 2
1 1
1/ 2 2 2 . 2
2 3 / 2 3 / 22 ( )2 13
h h
h h
Q K gh dA K gh bdh K b g h dhd d d
Q K b g h hd
= = = →
= −
∫ ∫ ∫

FUNDAMENTOS DE MECANICA DE FLUIDOS_Ing_.Jorge Rosasco.
Mod. 15 Vertederos (versión preliminar)
10
Fig.15.4_1 15.4.2 Orificios circulares. Supongamos un orificio circular como se indica en la Fig.15.4_2, podemos establecer ahora para un área elemental:
2 22 2 2 22
2 22 2 ( )
2 22 2 ( )( )r
r
AB AC r z
dA r z dz
dQ K g h z r z dzd
Q K g h z r z dzd−
= = − →
= − →
= − − →
= − −∫
Resolviendo esta integral, queda:
⎭⎬⎫
⎩⎨⎧ −−−−= ...6)(
653561054)(
102452)(
3211 22
hr
hr
hrghrdKQ π
Con un pequeño margen de error puede aplicarse la fórmula aproximada:
⎭⎬⎫
⎩⎨⎧ −= 2)(
3211 22
hrghrdKQ π
Fig.15.4_2
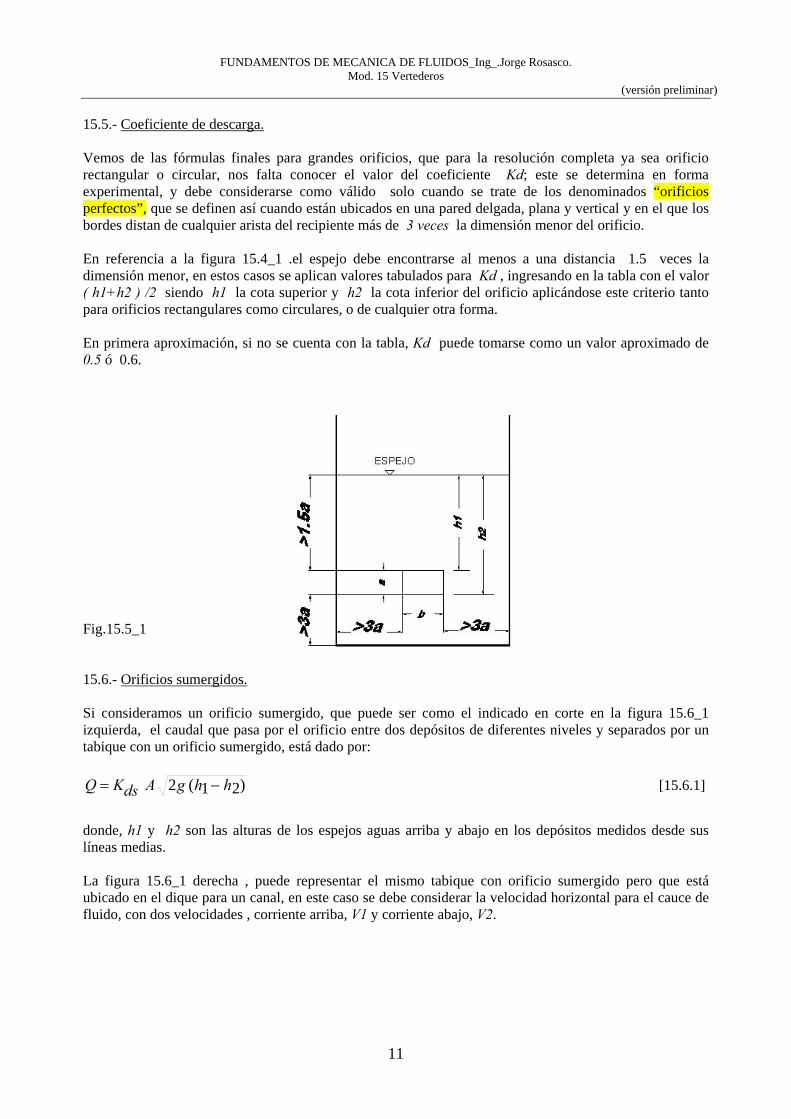
FUNDAMENTOS DE MECANICA DE FLUIDOS_Ing_.Jorge Rosasco.
Mod. 15 Vertederos (versión preliminar)
11
15.5.- Coeficiente de descarga. Vemos de las fórmulas finales para grandes orificios, que para la resolución completa ya sea orificio rectangular o circular, nos falta conocer el valor del coeficiente Kd; este se determina en forma experimental, y debe considerarse como válido solo cuando se trate de los denominados “orificios perfectos”, que se definen así cuando están ubicados en una pared delgada, plana y vertical y en el que los bordes distan de cualquier arista del recipiente más de 3 veces la dimensión menor del orificio. En referencia a la figura 15.4_1 .el espejo debe encontrarse al menos a una distancia 1.5 veces la dimensión menor, en estos casos se aplican valores tabulados para Kd , ingresando en la tabla con el valor ( h1+h2 ) /2 siendo h1 la cota superior y h2 la cota inferior del orificio aplicándose este criterio tanto para orificios rectangulares como circulares, o de cualquier otra forma. En primera aproximación, si no se cuenta con la tabla, Kd puede tomarse como un valor aproximado de 0.5 ó 0.6. Fig.15.5_1 15.6.- Orificios sumergidos. Si consideramos un orificio sumergido, que puede ser como el indicado en corte en la figura 15.6_1 izquierda, el caudal que pasa por el orificio entre dos depósitos de diferentes niveles y separados por un tabique con un orificio sumergido, está dado por:
)21(2 hhgAdsKQ −= [15.6.1]
donde, h1 y h2 son las alturas de los espejos aguas arriba y abajo en los depósitos medidos desde sus líneas medias. La figura 15.6_1 derecha , puede representar el mismo tabique con orificio sumergido pero que está ubicado en el dique para un canal, en este caso se debe considerar la velocidad horizontal para el cauce de fluido, con dos velocidades , corriente arriba, V1 y corriente abajo, V2.
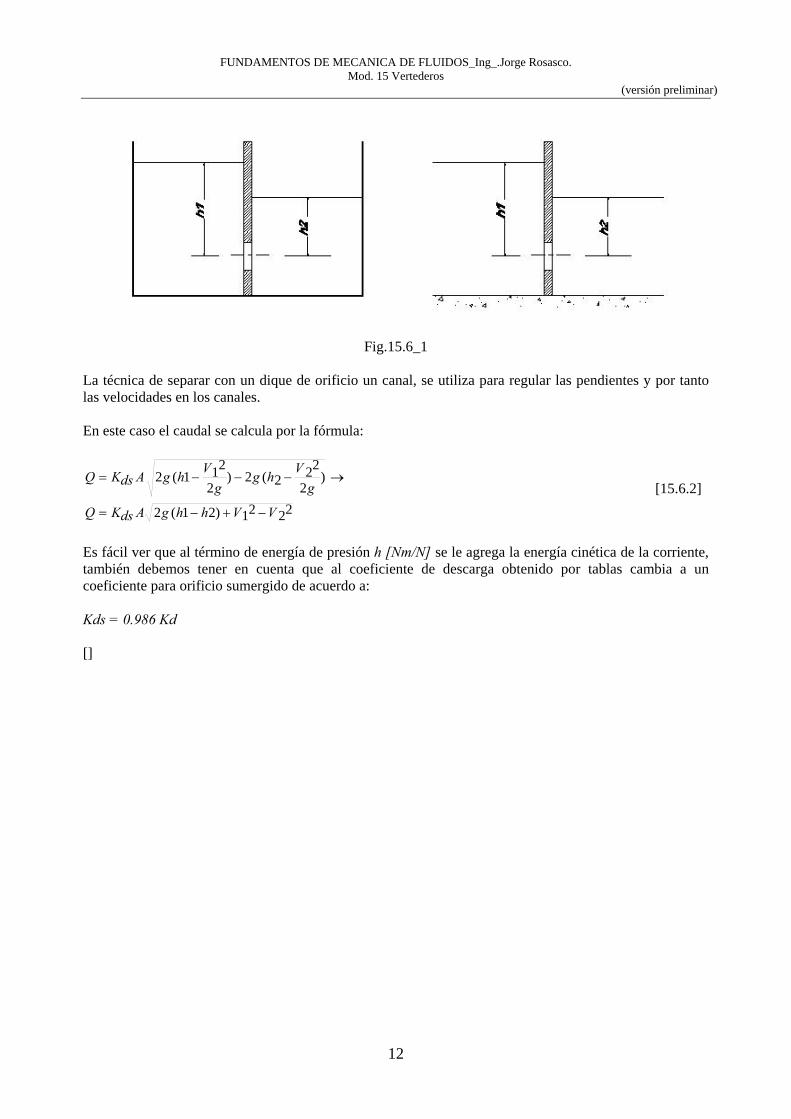
FUNDAMENTOS DE MECANICA DE FLUIDOS_Ing_.Jorge Rosasco.
Mod. 15 Vertederos (versión preliminar)
12
Fig.15.6_1
La técnica de separar con un dique de orificio un canal, se utiliza para regular las pendientes y por tanto las velocidades en los canales. En este caso el caudal se calcula por la fórmula:
2221)21(2
)2
222(2)2
211(2
VVhhgAdsKQ
gVhg
gVhgAdsKQ
−+−=
→−−−= [15.6.2]
Es fácil ver que al término de energía de presión h [Nm/N] se le agrega la energía cinética de la corriente, también debemos tener en cuenta que al coeficiente de descarga obtenido por tablas cambia a un coeficiente para orificio sumergido de acuerdo a: Kds = 0.986 Kd []

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
1
16 INTRODUCCIÓN A LA TURBO MAQUINARIA. 16.1. Definición general. Se denominan turbo máquinas a los equipos que en general efectúan un vinculo de conversión entre energía fluidica y energía mecánica, ya sea para agregar energía a un fluido proveniente de una acción mecánica a través por ejemplo de un eje, [caso de las bombas] o recíprocamente, para extraer energía de un fluido y convertirla en energía mecánica, [caso de las turbinas]. En la Fig.16.1_1, se ve un esquema de esto donde tanto bombas como turbinas se han representado como cajas negras, presentando solamente los sentidos en que fluye la energía y se realiza la conversión de energía.
Fig.16.1_1
En el caso de la bomba, la energía de flujo a la entrada es pequeña, y grande a la salida, porque recibe el aporte y la conversión de la energía mecánica desde el exterior, como ejemplo pensamos en la elevación de agua por bombeo desde la cisterna de subsuelo a los depósitos de la terraza en un edificio. Lo opuesto ocurre para la turbina, la energía a la entrada es grande y pequeña en la salida, la diferencia se convierte en energía mecánica, como ejemplo pensamos en el aprovechamiento de energía de una represa que mueve la turbina por diferencia de nivel y caída de agua, la energía mecánica se extrae del eje de la máquina y se aplica para mover generadores de electricidad. Una clasificación general de la Turbo maquinaria se da en la tabla siguiente:
Siendo en particular importante dentro de la currícula del Ingeniero Ambiental o Industrial el manejo de situaciones con problemas de bombeo, nos abocamos acá al primero de los dos esquemas, vale decir la aplicación de las bombas y algunos aspectos para el diseño y selección de las mismas. Primero diremos que las bombas son máquinas hidráulicas que impulsan fluidos, en el caso de los gases, se denominan ventiladores y compresores.

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
2
Los ventiladores impulsan un caudal volumétrico grande con una variación de presión ∆p entre entrada y salida del flujo, relativamente baja. Recíprocamente los compresores impulsan un caudal relativamente pequeño con una variación de presión ∆p, elevada. Cuando se trata de impulsar líquidos las máquinas que toman trabajo del medio ambiente se denominan en general bombas, si tienen ejes rotativos y sus volúmenes interiores son fijos se denominan turbo-máquinas, si las cámaras interiores son de volumen variable se las denomina de desplazamiento positivo. La figura siguiente ilustra algunas bombas de desplazamiento positivo, Fig. 16.1_2, de arriba hacia abajo se observa a.- una bomba peristáltica que trabaja variando los volúmenes interiores flexibles de sus cámaras, (el corazón de los mamíferos y aves sería un equivalente de este tipo, pero mucho más sofisticado), b.- bomba rotativa de lóbulos, la rotación de los ejes provoca una variación periódica de los volúmenes de entrada y salida. c.- bomba de engranajes, básicamente también trabaja por volúmenes variables, son aptas para generar muy altas presiones (hasta 400 bar técnicos) y se utilizan en equipamiento con sistemas oleohidráulicos , por ejemplo, maquinas viales, dirección hidráulica, movimiento de servos lineales o rotacionales en aeronáutica, etc. d.- bomba de doble tornillo. e.- bomba de lóbulos rotatoria.
Fig. 16.1_2.
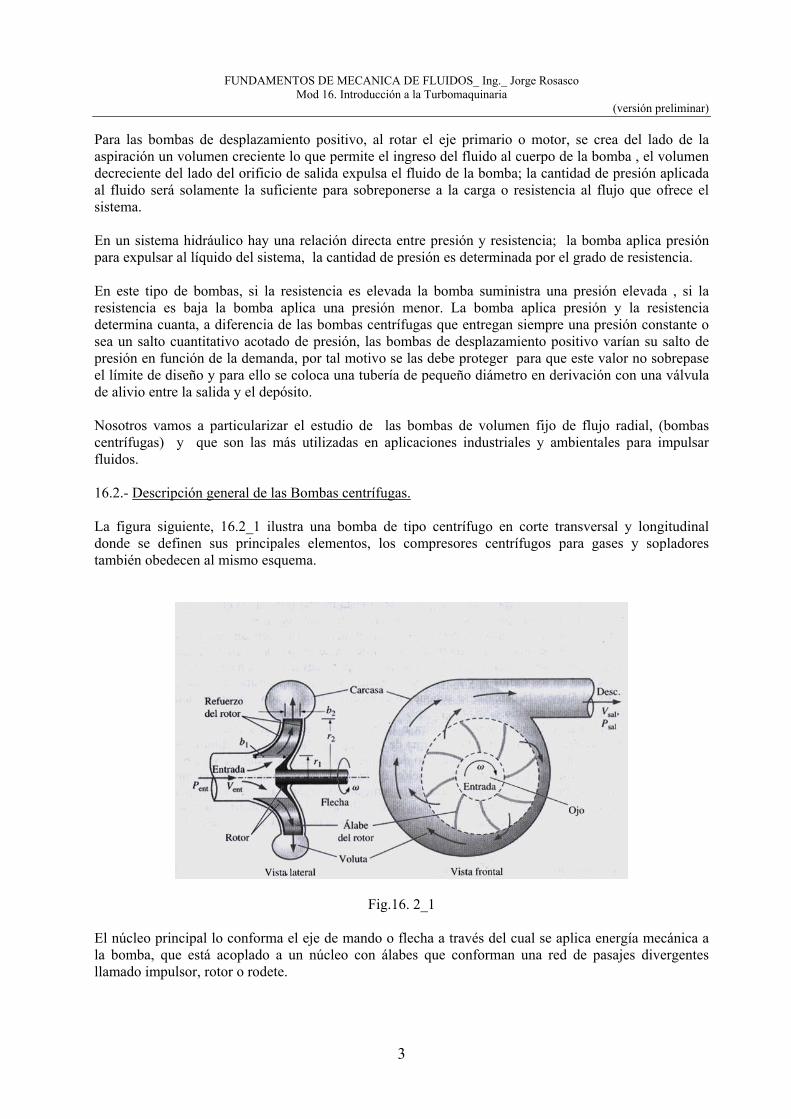
FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
3
Para las bombas de desplazamiento positivo, al rotar el eje primario o motor, se crea del lado de la aspiración un volumen creciente lo que permite el ingreso del fluido al cuerpo de la bomba , el volumen decreciente del lado del orificio de salida expulsa el fluido de la bomba; la cantidad de presión aplicada al fluido será solamente la suficiente para sobreponerse a la carga o resistencia al flujo que ofrece el sistema. En un sistema hidráulico hay una relación directa entre presión y resistencia; la bomba aplica presión para expulsar al líquido del sistema, la cantidad de presión es determinada por el grado de resistencia. En este tipo de bombas, si la resistencia es elevada la bomba suministra una presión elevada , si la resistencia es baja la bomba aplica una presión menor. La bomba aplica presión y la resistencia determina cuanta, a diferencia de las bombas centrífugas que entregan siempre una presión constante o sea un salto cuantitativo acotado de presión, las bombas de desplazamiento positivo varían su salto de presión en función de la demanda, por tal motivo se las debe proteger para que este valor no sobrepase el límite de diseño y para ello se coloca una tubería de pequeño diámetro en derivación con una válvula de alivio entre la salida y el depósito. Nosotros vamos a particularizar el estudio de las bombas de volumen fijo de flujo radial, (bombas centrífugas) y que son las más utilizadas en aplicaciones industriales y ambientales para impulsar fluidos. 16.2.- Descripción general de las Bombas centrífugas. La figura siguiente, 16.2_1 ilustra una bomba de tipo centrífugo en corte transversal y longitudinal donde se definen sus principales elementos, los compresores centrífugos para gases y sopladores también obedecen al mismo esquema.
Fig.16. 2_1 El núcleo principal lo conforma el eje de mando o flecha a través del cual se aplica energía mecánica a la bomba, que está acoplado a un núcleo con álabes que conforman una red de pasajes divergentes llamado impulsor, rotor o rodete.

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
4
El fluido ingresa a través del pasaje cilíndrico central de entrada después de lo cual pasa a la región de los álabes rotatorios donde es impulsado por los mismos adquiriendo velocidad tangencial y radial debido a la transferencia de cantidad de movimiento; también incorporan las partículas de fluido mayor velocidad radial debido al efecto de fuerza centrífuga que le produce el movimiento circular en espiral. Los pasajes divergentes transforman parte de la energía cinética de la partícula en energía de presión lo que continúa sucediendo cuando las partículas abandonan el rotor e ingresan en el pasaje divergente caracol de la voluta o difusor hasta la salida, la velocidad de entrada y salida está ecualizada cuando el flujo es permanente y los diámetros de los pasajes de entrada y salida son iguales; la presión resulta incrementada entre la entrada y la salida. Los álabes están normalmente inclinados hacia atrás en referencia al sentido de la rotación como se indica en la figura, pero en algunas aplicaciones pueden ser planos lo que facilita su construcción, en general los álabes planos pueden alcanzar presiones algo mayores pero tienen una eficiencia mecánica menor. 16.3- Teoría elemental de la bomba de flujo radial. Se puede desarrollar una teoría elemental para la bomba de flujo radial, suponiendo que el flujo interior entre cada par de álabes de la región en forma de corona del impulsor, es bidimensional e ideal, en el sentido que no consideramos capa límite ni fenómenos de desprendimiento, esta simplificación considera al flujo carente de viscosidad, en la realidad el flujo es tridimensional, rotacional y hay algo de separación para determinadas condiciones lo que causa las pérdidas de carga internas de la bomba. En la Fig.16.3_1, se muestra el volumen de control en forma de corona de la región del impulsor en sus dos vistas, la circunferencia interior muestra el área de intercambio de entrada del flujo del volumen de control. y la exterior, el área de intercambio de salida, también se muestra el sentido de rotación del impulsor en referencia a su geometría envolvente.
Fig.16.3_1
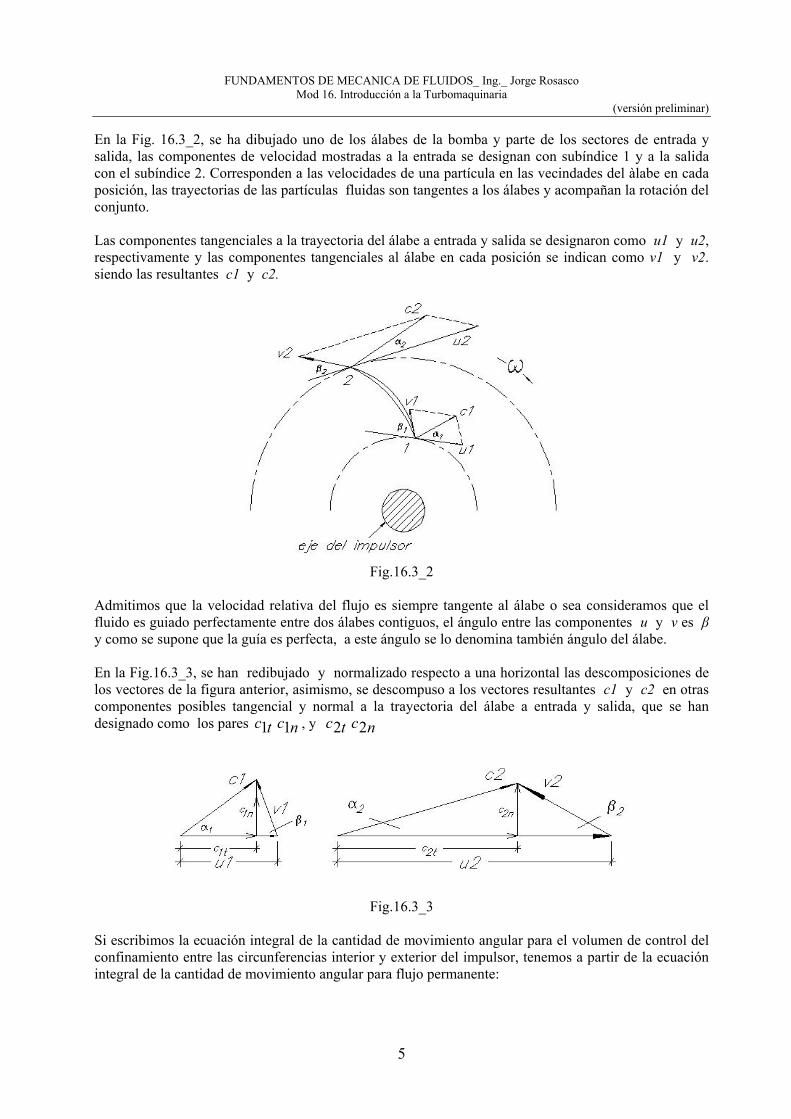
FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
5
En la Fig. 16.3_2, se ha dibujado uno de los álabes de la bomba y parte de los sectores de entrada y salida, las componentes de velocidad mostradas a la entrada se designan con subíndice 1 y a la salida con el subíndice 2. Corresponden a las velocidades de una partícula en las vecindades del àlabe en cada posición, las trayectorias de las partículas fluidas son tangentes a los álabes y acompañan la rotación del conjunto. Las componentes tangenciales a la trayectoria del álabe a entrada y salida se designaron como u1 y u2, respectivamente y las componentes tangenciales al álabe en cada posición se indican como v1 y v2. siendo las resultantes c1 y c2.
Fig.16.3_2
Admitimos que la velocidad relativa del flujo es siempre tangente al álabe o sea consideramos que el fluido es guiado perfectamente entre dos álabes contiguos, el ángulo entre las componentes u y v es β y como se supone que la guía es perfecta, a este ángulo se lo denomina también ángulo del álabe. En la Fig.16.3_3, se han redibujado y normalizado respecto a una horizontal las descomposiciones de los vectores de la figura anterior, asimismo, se descompuso a los vectores resultantes c1 y c2 en otras componentes posibles tangencial y normal a la trayectoria del álabe a entrada y salida, que se han designado como los pares 1 1c ct n , y 2 2c ct n
Fig.16.3_3
Si escribimos la ecuación integral de la cantidad de movimiento angular para el volumen de control del confinamiento entre las circunferencias interior y exterior del impulsor, tenemos a partir de la ecuación integral de la cantidad de movimiento angular para flujo permanente:

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
6
∑ ∫→→→
∗=cs
dAVM.
ρη , siendo en este caso: →→
×= Vrη , entonces reemplazando:
∑ ∫→→→→→
∗×=cs
dAVVrM.
][ρ [16.3.1]
al hacer la integral [16.3.1] para nuestra superficie de control como el balance entre entrada y salida, de
la cantidad →→
∗ ][ AdVρ nos da el flujo másico que permanece constante, y como las componentes c1n y c2n son paralelas a los radios, y se anulan en sus productos vectoriales, la expresión anterior queda:
[ ] [ ]2 2 1 1 2 2 1 1r r rT M m c c Q c crt tt t ρ→ → •= = − = −∑ [16.3.2]
donde Q, representa el caudal volumétrico, y la expresión dentro del paréntesis, el flujo de la cantidad
de movimiento angular a través del volumen de control, en el primer miembro, T→
, representa el momento de torsión, que tiene la dirección z, y que está aplicado al eje del impulsor, en lo sucesivo trabajaremos con el módulo de este vector, ya que tiene siempre la misma dirección. La potencia suministrada al fluido será entonces, ωT, [1/seg][N.m], siendo ω la velocidad angular del impulsor; por lo que la anterior queda:
[ ] [ ]2 2 1 1 2 2 1 1[ ]2 12 1
rT Q c c r Q c u c ut t t tT Q r u r uω ω ρ ρ
ρ= − = − →
= − [16.3.3]
Ecuación de Euler. Partiendo de la relación [16.3.3]:
[ ]2 2 1 1T Q c u c ut tω ρ= −
El primer miembro, representa la potencia útil entregada por la bomba: Weui
y como M Qρ=i
, y recordando que el trabajo de ejes por unidad de masa se podía expresar como:
We W Mee eMϖ ϖ= → =
ii i
i
podemos reescribir la la expresión de la potencia útil como:
[ ]2 2 1 1c u c ue t tϖ = − [m2/seg2] si dividimos en ambos miembros por g, obtenemos la energía útil o carga hidrodinámica neta, expresada en metros:
[ ]2 2 1 1c u c ue t tHu g gϖ −
= = [m] [16.3.4]
Este resultado se conoce como Ecuación de Euler, aunque probablemente haya sido desarrollado mucho mas acá en el tiempo.

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
7
16.4.- Análisis energético general de la bomba. Vamos a considerar un esquema general de la bomba como el indicado en la Fig. 16.4_1, puede observarse que para el análisis, en la entrada y salida se han considerado en forma genérica los parámetros de control.
Fig.16.4_1
Las secciones 1 y 2 representan las bridas en las secciones de entrada y salida de la bomba En el caso general, la salida y la entrada de la bomba podrían estar a distintas alturas, aunque este desnivel es por lo general pequeño frente a las alturas manejadas en la instalación completa y también podrían ser distintos los diámetros de las secciones en estas estaciones, por lo cual aparecerán en el análisis en general 2121 VVDD ≠→≠ , y 21 zz ≠ . La aplicación de la ecuación de energía entre los puntos 1 y 2 sin considerar pérdidas de calor por fricción es, considerando que se aplica trabajo desde el medio ambiente:
2 2 Nm2 1 2 1[ ] ( ) [ ]2 12 Kgp p V V g z zejeϖρ− −
− = + + −
dividendo en ambos miembros por g, queda:
2 22 1 2 1 ( ) [m]2 12p p V Veje z z
g gϖ
γ− −
− = + + −
que puede reescribirse como:
2 2 - [m] 2 12 2
p V p Vejes H [ z] [ z]ug γ g γ g
ϖ− = = + + + +
Este valor indicado en [m] se denomina como dijimos antes carga hidrostática neta, y se indica con Hu, es equivalente a la altura máxima que una columna de agua puede ser elevada por la bomba, a caudal nulo, es decir impulsar fluido a bloqueo en altura pero sin que salga por el extremo superior y es también la diferencia entre las líneas de carga hidrodinámica del sistema o de energía total entre la entrada y a la salida. El signo menos en el primer miembro indica que el medio ambiente es el que aplica trabajo mecánico. Un caso particular para una bomba en que se tenga como es lo más habitual 2121 VVDD =→= y
21 zz ≈ , nos daría para la carga hidrostática neta:
2 1p pHuγ−
=

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
8
Como, de [16.6.4] era:
WegHejeM
ϖ•
•= = →
[ ]We M gHu gQ Hu Q Huρ γ• •
= = = [16.4.1] Esta última expresión indica el valor de la potencia neta que se utiliza para bombeo o potencia útil, y está indicada en [watts]. Como las pérdidas internas por fricción que no habíamos tenido en cuenta, siempre estarán presentes, hará falta una potencia algo mayor a la entrada para poder compensarlas y obtener la potencia útil requerida, a esta potencia algo mayor, la llamamos potencia de accionamiento de manera que:
( ) ( )W W We acc e e perd• • •
= +
a partir de esto, podemos indicar para la eficiencia de la bomba como:
( )
We
We accη
•
•=
De la [16.4.1], despejando H, y teniendo en cuenta que la potencia puede también se expresada como torque por velocidad:
W TeHu g gQ Qω
ρ ρ
•
= =
y reemplazando el resultado previamente obtenido [16.3.3], queda:
[ ]2 2 1 1T c u c ut tHu gQ gωρ
−= =
que podemos escribir observando las velocidades con el diagrama 16.3_2
[ ] cos cos2 2 2 1 1 12 2 1 1T c u c u u c u ct tHu gQ g gω α αρ
− −= = = [16.4.2]
El mejor diseño, corresponde al valor en el que la carga hidrostática neta tienda al máximo, para lo cual el segundo sumando de [16.4.2] debería tender a cero; esto se logra cuando α1 = 90º, entonces quedará:
cos2 2 2u cHumx gα
=
Por otra parte, del diagrama [16.3_3] derecha, se obtiene que:

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
9
2 2 2tan cot 22 2 2 2cotcos2 2 2 22 2
c u cn tu c ct n
c u cct n
ββ
α β
−= → = →
−
= −=
resulta reemplazando:
2 cot2 2 2 2u u cnHumx g gβ
= − [16.4.3]
y como por conservación de masa:
2 21 1 1 2 2 2Q r b c r b cn nπ π= = donde b1 y b2 son los anchos del rotor (Fig. 16.3_1), queda:, tomando como hipótesis que el caudal sale por todo el perímetro externo del impulsor en forma normal:
2 2 2 2
Qcn r bπ=
reemplazando este resultado en la [16.4.3] queda finalmente:
2 2 22 cos cos2 2 2[ ] [ ]2 22 2 2
r Q r rH Qumx g gg r b g bω ω β ω ω β
π π= − = − [16.4.4]
Esta ecuación representa una recta de pendiente negativa, ya que es del tipo:
1H a a Qumx o= − la pendiente depende de β2, en general por estabilidad de funcionamiento se utilizan álabes de β2< 90º con lo cual el segundo término seguirá siendo negativo, entonces la función Hmx vs. Q para diseño ideal de la bomba queda representada en la figura siguiente 16.4_2 siguiente, en la misma se presenta la recta de pendiente negativa de desempeño ideal que no considera las pérdidas, y la curva típica de desempeño real. La altura manométrica varia con el caudal, el primer término es la ordenada al origen y representa la altura para caudal nulo a bloqueo, el otro extremo representa el caudal máximo cuando la bomba no es demandada en altura o para altura cero. Para algunas aplicaciones las bombas radiales pueden ser demandadas, por ejemplo la alimentación de las calderas humotubulares, en las que β2 =0.

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
10
Fig.16.4_2
La potencia nominal suministrada al flujo es de acuerdo a [16.4.1]:
[ ]We M gHu gQ Hu Q Huρ γ• •
= = = y su relación con la potencia aplicada al impulsor o potencia de accionamiento, permite definir la eficiencia:
W gQ Hu g QHu Q Hue TaccTaccWacc
ρ ρ γηω ηω ηω
•
•= = → = = [16.4.5]
Los fabricantes de bombas, proporcionan estas curvas de desempeño, por ejemplo, Fig.16.4_3, donde se grafica H en ordenadas y Q en abscisas, también es habitual que para una carcasa determinada puedan adaptarse 3 ó 4 impulsores de distintos diámetros externos, y se apliquen al mismo cuerpo de la carcasa exterior de manera que pueden intercambiarse fácilmente, sin hacer el gasto adicional de cambiar una bomba completa, ante una necesidad de cambio de prestación, por eso las gráficas poseen varias curvas de desempeño, que se parametrizan en función de los distintos diámetros externos de impulsor eφ que se indican en [mm]. A estas curvas se le superponen otras de iso-eficiencia, parametrizadas en [%], observe que los mayores rendimientos como es lógico, corresponden a la zona donde la curva teórica y la real se aproximan como se ve en la Fig.16.4_2. Tanbien a veces se incluyen (gráfica central de Fig.16.4_3,) gráficas adicionales
de potencia de accionamiento ][ accW•
para los distintos diámetros en función del caudal Q. Un tercer tipo de gráfica define curvas de un parámetro denominado Altura Neta Positiva de Aspiración [ANPA] ó [NPSH] de acuerdo a sus siglas en inglés (Net Positive Suction Height) que se indica en [m], en función del caudal entregado parametrizado para los diámetros del impulsor; el concepto de ANPA lo explicaremos en el párrafo siguiente.

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
11
Fig. 16.4_3 16.5.- Otras curvas características de las bombas. En las curvas típicas o de desempeño real para bombas de β2<90º como se ve en la Fig. 16.4_2, se observa una diferencia bastante apreciable entre la curva teórica y la curva de desempeño real, esto se debe a las simplificaciones hechas para el desarrollo simplificado de desempeño. Para obtener la curva de desempeño real es pr tanto necesario realizar un ensayo para extrapolar los datos necesarios y trazar las gráficas correspondientes. Las curvas se trazan a a una velocidad de giro en RPM constantes, que corresponden normalmente a la velocidad nominal del motor de accionamiento, el caudal es normalmente la variable independiente, la cual se da en unidades de volumen por unidad de tiempo [m3/seg], por lo general en ordenadas se grafican para ejes paralelos, la altura manométrica útil Hu ó H la potencia al freno Pf o [BHP] brake HP, y el rendimiento η.

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
12
La figura siguiente Fig.16.5_1 se muestran las curvas típicas de las bombas centrífugas de β2 < 90º, se observa que la curva de altura es aproximadamente constante a caudales bajos y decrece para caudales altos; a revoluciones fijas y tamaño de rotor definido, la bomba no puede suministrar más que el caudal máximo a la altura de la brida de salida . La curva de potencia al freno, crece hasta el caudal máximo y luego decrece hasta hacerse inestable, el rendimiento, crece hasta un máximo y luego decrece al aumentar el caudal. Cabe recordar que cada tipo de bomba tiene una familia de curvas características.
Fig.16.5_1 Resumiendo, la curva de desempeño real de la bomba varía entre dos extremos, cuando la carga hidrostática útil es cero, H=0 , el caudal es máximo y se denomina flujo a descarga libre, para el otro extremo el caudal volumétrico es nulo, y la altura de carga máxima se denomina condición de bloqueo porque no se entrega ningún caudal. Resulta evidente de la ecuación [16.4.1], que en estos extremos la potencia útil y el rendimiento [16.4.2] son nulos ya que Q o bien H son nulos, para valores dentro del rango de variación de ambos parámetros la potencia desarrollada y el rendimiento tendrán valores diferentes de cero y presentarán un máximo. En el eje de abscisas se representa el caudal volumétrico Q, y en ordenadas hay tres escalas correspondientes a: H, (altura de carga hidrostática), η (bomba) , rendimiento de la bomba que varía entre 0 y 1, y la curva real de la potencia absorbida, bhp ,(brake HP) cuya curva ideal es horizontal a las revoluciones constantes de entrada, como es lógico los máximos de η y bhp corresponden a un caudal único. La tripla de curvas cambia con las RPM, es decir las RPM son el parámetro de las mismas. Por otra parte la demanda del sistema define su propia curva de carga, una vez definido el circuito hidráulico del sistema, quedarán establecidos la longitud y diámetro de las tubería corriente abajo y corriente arriba de la bomba, y los accesorios de manera que la pérdida de carga total hF estará establecida. Por tanto a mayor demanda de caudal necesario, mayor será la altura necesaria que deberá tener la bomba para impulsar el flujo, por esta razón la curva de demanda o de H (necesaria), es una curva creciente, y habrá una curva de este tipo para cada configuración física del sistema que se arme en torno a la bomba.

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
13
Cuando dibujamos esta curva para las mismas unidades que la curva de desempeño real y superponemos ambas en el mismo diagrama obtenemos una gráfica como la indicada por la Fig.16.4_5 siguiente:
Fig. 16.4_5
En la intersección queda definido el punto de operación y el caudal único al que trabajará el sistema y la carga hidrostática que estará desarrollando la bomba intercalada en este sistema de tuberías y accesorios. El éxito del diseño es que además esta vertical coincida con la de rendimiento máximo o esté próxima a ella, por el contrario si estamos muy alejados podremos tratar de optimizar nuestro circuito para disminuir al máximo la pérdida de carga o seleccionar otro diámetro de impulsor u otra bomba para mejorar el rendimiento. 16.5b.- Equipamiento de prueba. Las bombas son probadas con agua desmineralizada en un banco de pruebas para bombas centrífugas, como el indicado en la Fig. 16.5_2, este banco posee una válvula reguladora 1 , un medidor de caudal o caudalímetro 2, la bomba a ensayar 3, un depósito A donde se almacena el agua del circuito, los circuitos de entrada y salida, poseen manómetros para la medición de presión en estas posiciones.
Fig.16.5_2
Q

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
14
16.5c.-La velocidad específica: Para ayudar a una mejor selección se utiliza un parámetro llamado Velocidad Específica, este parámetro relaciona la altura y el caudal con el tamaño de la bomba, esta velocidad denominada Ns se consigue trabajando con las reglas de semejanza y los parámetros adimensionales poniendo el número de vueltas en función del caudal, la altura y sacando el diámetro, la definición es:
1 / 2
3 / 4
nQNsH
=
El proyectista usando Ns selecciona el tipo de bomba más acorde al trabajo a desarrollar, puesto que la velocidad específica está directamente relacionada con el diseño de la bomba más eficiente, como se muestra en la figura a continuación
Vemos que los Ns bajos significan Q bajos y H altos, por lo tanto el diseño corresponde a una bomba centrífuga, de lo contrario caudales altos y alturas bajas corresponden a una bomba axial, es interesante observar el cambio del tipo de álabes de rotor a medida que el Ns aumenta.

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
15
16.6.- Parámetros para modelización de turbomaquinaria. Los parámetros intervinientes en el diseño de turbomaquinaria , pueden integrarse en la expresión funcional homogénea siguiente:
0],,,,,,[ =Δ•
μρω pQDeWf [16.6.1] donde:
circulante fluido del d viscosidacirculante fluido del densidad
saliday entrada entrepresión de salto co volumétricaudal
Impulsor delexterior diámetro angular dad veloci
entregada /potenciantoaccionamie de potencia
===Δ====
•
μρ
ω
pQD
eW
Es una expresión de siete variables, relacionadas lo que nos dice a través del teorema π, que habrá cuatro grupos adimensionales independientes. con tres relaciones funcionales de vinculación entre ellos:
]4,3,2[1 ππππ f= Haciendo el trabajo de encontrar a partir de [16.8.1] los grupos adimensionales resultan:
53DWeCw
ρω
•
= coeficiente de potencia;
2222 DHg
Dp
Cpωρω
=Δ
= coeficiente de presión:
3DQ
Cqω
= coeficiente de caudal;
μρω 2D
=Re Nº de Reynolds.
Para trabajar con la similitud entre un modelo de maquina hidráulica y su prototipo, o bien para analizar el comportamiento de una máquina con otro fluido compresible diferente del agua, que es el que se toma como base de diseño, sería necesaria la igualdad de tres de ellos, típicamente el Nº de Reynolds y otros dos grupos, para la segunda forma del coeficiente de presión, se consideró que HgHp ργ ==Δ . En el caso de tener dos bombas de la misma familia geométrica y que operan en puntos homólogos puede establecerse para ambas que:
3 2 2 3 5
2 2 2 2 2 2 2 2 2 2
1 1 1 1 1 1 1 1 1 1
Q n D H n D P n DQ n D H n D P n D
ρρ
⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞= = =⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
16
16.7.- Tensión de vapor y Cavitación. Si tenemos un depósito aislado que contenga parcialmente agua y aire a presión atmosférica normal, y a una temperatura determinada, una parte de líquido se evapora, y el proceso de evaporación continua hasta que se establece un equilibrio entre las fases líquido y vapor. Cuando el equilibrio se establece, aparecerá una pequeña tensión o presión de vapor que se adiciona a la presión atmosférica, que tendrá diferentes valores como función de la temperatura inicial del agua. En la Fig. 16.7_1 se observa esta situación, cuando la interfase está formada por agua destilada y aire, el recipiente de la izquierda y su contenido se ecualizaron a una temperatura de 15ºC, la presión atmosférica interna inicial es de 101.3 KPa, cuando el equilibrio se produjo, la presión sobre la superficie el líquido será de (101,3+1.7) KPa, este último valor sumado, es la tensión de vapor del agua a 15ºC. La tensión o presión de vapor varia para cada fluido con la temperatura y con la condición de presión exterior que haya sobre la interfase líquida, en el caso del agua aumentará con la temperatura y con la disminución de presión exterior inicial de la interfase. Por ejemplo si a presión atmosférica la temperatura del agua alcanza 100ºC (recipiente a la derecha), la presión de vapor iguala a la presión atmosférica pv=101.3 KPa, porque se alcanzan las condiciones de ebullición. También la ebullición puede ocurrir a temperaturas más bajas si la presión atmosférica disminuye. Otro ejemplo, en las condiciones del experimento a 15ºC , si en lugar de agua se coloca amoníaco, el valor de sobrepresión observado cuando se alcanza el equilibrio es de 33.8 KPa.
Fig.16.7_1
Durante la operación de bombeo, y en algunas otras condiciones en que se mueven líquidos se pueden dar condiciones en las cuales la presión local alcanza valores de las condiciones de ebullición a esa temperatura, se producen entonces en el seno del líquido formación de burbujas de aire atrapado, que luego se conducen a zonas de mayor presión por las partes móviles por ejemplo los álabes del rotor de la bomba, cuando esto ocurre, las burbujas colapsan produciendo un pico de presión local que al ser reiterado puede dañar la superficie móvil. Este fenómeno se denomina cavitación y entonces las condiciones de contorno críticas deben ser evitadas al planificar el diseño o la implementación del sistema de bombeo.

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
17
Ejemplo 1.- Un sistema de distribución de agua trabaja aproximadamente a 30ºC, se desea establecer cual será la presión mínima en el sistema para evitar cavitación. Rta. La presión de vapor del agua a 30ºC es 4.25 KPa , por lo cual ningún punto en la masa líquida en circulación debe tener una presión inferior a 4.25 KPa absolutos. Esta situación podría presentarse en alguna condición de vacío parcial en la rama de succión de la bomba cuando la presión manométrica sea 4.25 - 101.3= - 97.05 Kpa. _______ 16.8.- Definición de ANPA – disponible (Altuna Neta Positiva de Aspiración disponible). Si consideramos un circuito de línea de aspiración para la bomba como el indicado en la Fig.16.8_1, y aplicamos la ecuación de energía entre el punto 2 del centro de la brida de aspiración y el punto 1 del espejo del depósito, obtenemos:
Fig.16.8_1
0)12(2
212212 =+−+−
+−
LhgzzgVVppρ
[m2/seg2]
dividiendo en ambos miembros por la aceleración de la gravedad, g, queda:
→=+−+−
+−
0)12(2
212212Lhzz
gVVpp
γ
Considerando que en este caso p1 es la presión atmosférica, y que la energía cinética del punto 1 es muy baja:
22 2 02
p p Vat z hLgγ−
+ + Δ + = → [m]
22 2[ ] [ ]
2p V pat z hFgγ γ
+ = −Δ − [16.8.1]

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
18
A veces a la expresión del primer miembro se la denomina presión dinámica, incluye los términos de la energía de presión y velocidad a la entrada de la bomba. En el ejemplo de la figura 16.8_1, habíamos colocado la bomba por encima de la línea de espejo en la succión y la diferencia de cotas quedó con signo negativo en la expresión [16.8.1], pero también la bomba en otros circuitos puede quedar por debajo de la línea de espejo:
Fig.16.8_2
Para este caso la expresión de la presión dinámica quedará:
22 2[ ] [ ]2
p V pat z hFgγ γ+ = + Δ −
Y en general la expresión entonces quedará como:
222[ ] [ ]2
p V pat z hFgγ γ+ = ± Δ −
restando en ambos miembros un término idéntico, referido a la tensión de vapor, queda::
22 2[ ] [ ]2
p V p p pat vv z hFgγ γ γ−
+ − = ± Δ − [16.8.2]
Al primer miembro de la ecuación [16.8.2] se lo denomina ANPA disponible, o NPSH disponible, Altura Neta Positiva de Aspiración [ANPA] ó [NPSH] de acuerdo a sus siglas en inglés (Net Positive Suction Height) , su valor es idénticamente igual al paréntesis del segundo miembro. Debemos tener en cuenta que los términos del segundo miembro están referidos a la tubería de aspiración, o sea corriente abajo de la bomba. Observando al ecuación anterior, vemos que cuando la cavitación es inminente, 2p se aproxima o iguala a la presión de vapor pv , y este caso la ecuación anterior queda:
22[ ] [ ]2
V p pat vp z hFd g γ−
= ≤ ± Δ − [16.8.3]

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
19
A este valor de la izquierda, que corresponde únicamente al término de la presión dinámica mínima , se lo denomina NPSH o ANPA necesario o requerido para cavitación . hemos colocado el signo menor o igual ya que el término de la derecha no ha variado para la configuración dada de la tubería de aspiración, entonces tendremos que la condición para evitar la cavitación es: ANPA (necesario) ≤ ANPA(disponible) En general conviene reemplazar en las ecuaciones anteriores el valor de 2V , para que en lugar de la velocidad aparezca el caudal, entonces al término de la presión dinámica se lo puede expresar como:
28 [ ]2Q p pat vp z hFd D gπ γ
−= ≤ ± Δ − [16.8.3b]
Siendo el primer miembro la carga de altura de aspiración indicada en metros, se puede representar el ANPA necesario o altura de carga de aspiración máxima posible para cada caudal, su representación altura vs.caudal , será una curva creciente, para la instalación ya que es una función cuadrática del caudal. Estas determinaciones se realizan a una temperatura y altura barométrica normales y estándar del fluido con la bomba en operación, se van fijando diversos caudales y para cada uno la presión p2 es reducida en el punto de entrada lentamente hasta alcanzar la presión de vapor., y se detectará entonces un cambio de sonido en la operación que será el indicio propio de que se ha iniciado la cavitación, en esta condición se determina una presión dinámica particular expresada en metros, que se denomina la altura neta positiva de aspiración necesaria o ANPA(nec). Cuando se hace la representación para el rango completo de caudales, se obtiene una curva creciente, ya que velocidad y caudal son proporcionales. Esta curva normalmente forma parte de la data de la bomba, y esquemáticamente se indica en línea de trazos en la figura siguiente 16..8_3:, siendo la curva de trazo continuo, la curva de desempeño real de la bomba.
Fig:16.8_3 En las ecuaciones anteriores, p2 denota la presión absoluta en el centro de la tubería de aspiración en la posición de la brida o posición de entrada, V la velocidad media que se ha establecido para el caudal de descarga libre, y vp la presión de vapor del fluido a la temperatura estándar de prueba..
Q
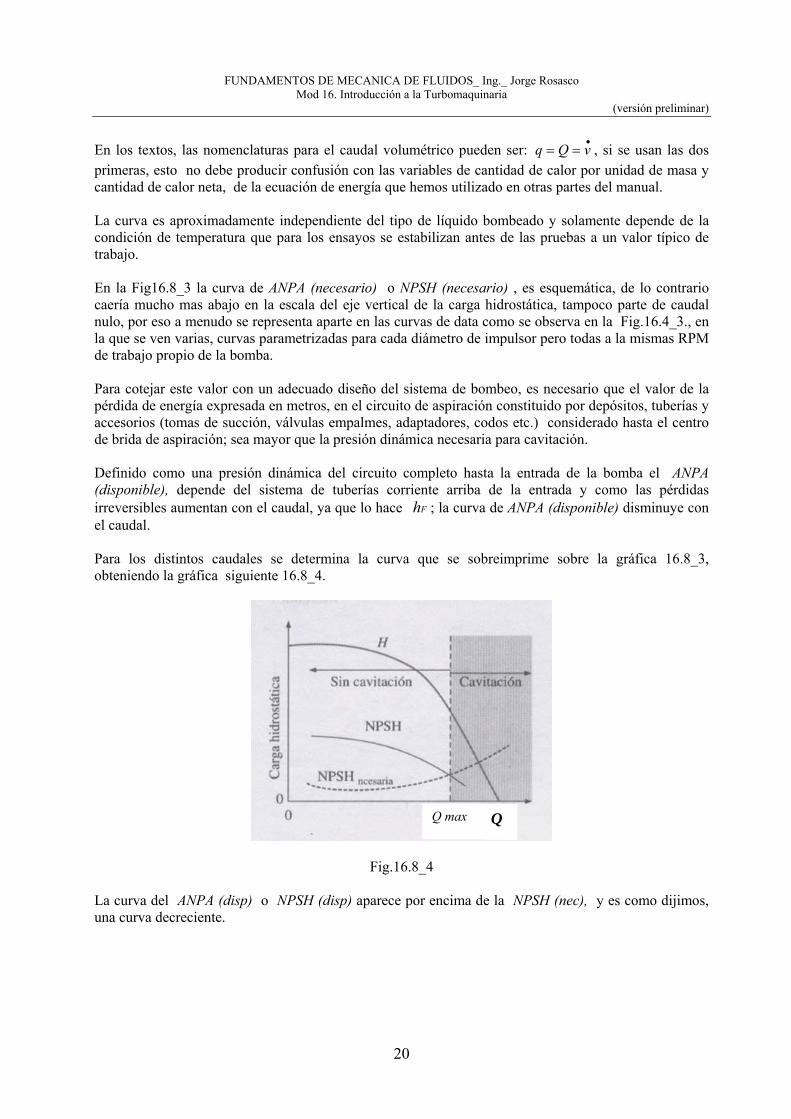
FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
20
En los textos, las nomenclaturas para el caudal volumétrico pueden ser: •
== vQq , si se usan las dos primeras, esto no debe producir confusión con las variables de cantidad de calor por unidad de masa y cantidad de calor neta, de la ecuación de energía que hemos utilizado en otras partes del manual. La curva es aproximadamente independiente del tipo de líquido bombeado y solamente depende de la condición de temperatura que para los ensayos se estabilizan antes de las pruebas a un valor típico de trabajo. En la Fig16.8_3 la curva de ANPA (necesario) o NPSH (necesario) , es esquemática, de lo contrario caería mucho mas abajo en la escala del eje vertical de la carga hidrostática, tampoco parte de caudal nulo, por eso a menudo se representa aparte en las curvas de data como se observa en la Fig.16.4_3., en la que se ven varias, curvas parametrizadas para cada diámetro de impulsor pero todas a la mismas RPM de trabajo propio de la bomba. Para cotejar este valor con un adecuado diseño del sistema de bombeo, es necesario que el valor de la pérdida de energía expresada en metros, en el circuito de aspiración constituido por depósitos, tuberías y accesorios (tomas de succión, válvulas empalmes, adaptadores, codos etc.) considerado hasta el centro de brida de aspiración; sea mayor que la presión dinámica necesaria para cavitación. Definido como una presión dinámica del circuito completo hasta la entrada de la bomba el ANPA (disponible), depende del sistema de tuberías corriente arriba de la entrada y como las pérdidas irreversibles aumentan con el caudal, ya que lo hace Fh ; la curva de ANPA (disponible) disminuye con el caudal. Para los distintos caudales se determina la curva que se sobreimprime sobre la gráfica 16.8_3, obteniendo la gráfica siguiente 16.8_4.
Fig.16.8_4
La curva del ANPA (disp) o NPSH (disp) aparece por encima de la NPSH (nec), y es como dijimos, una curva decreciente.
Q Q max

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
21
Hay un punto, que define el caudal máximo permisible que es cuando se produce el cruce de las curvas, ANPA necesario y ANPA disponible, que debe considerarse un límite mas allá del cual se producirá cavitación. Cabe acotar los siguientes aspectos adicionales: Una vez planteada la ecuación,
22 2[ ] [ ]2
p V p p pat vv z hFgγ γ γ−
+ − = ± Δ −
1.- el único valor negativo que aparece es Lh , y que puede hacer disminuir el valor del ANPA(disponible), sin embargo el valor (z1-z2), también puede hacerse negativo cuando z1 está por debajo de z2, como es el caso de las tomas típicas de aspiración, Fig.16.8._5.
Fig.16.8._5
2.- el valor 1patp = , aparece porque para el desarrollo de la ecuación se ha tomado un depósito abierto a la atmósfera, en el caso general el depósito puede estar cerrado y presurizado a una presión 1p mayor o menor a la atmosférica, o bien atp puede corresponder a valores no estándar, por ejemplo la presión atmosférica en la cima de una montaña. 16.8.1.-Propiedades de una Bomba Centrífuga. Dentro del campo normal de aplicación, las propiedades de una bomba centrífuga son: a.- Caudal uniforme, sin pulsaciones. b.- La presión o altura de elevación disminuye a medida que aumenta el caudal. En general, a partir del punto de funcionamiento, cuando se cierra la válvula de regulación de la tubería de impulsión aumenta la presión y se reduce la potencia. Sin embargo, las bombas de alta velocidad específica (impulsor semi-axial o hélice) no cumplen esta norma general. c.- La altura, medida en metros de columna de líquido, a la que eleva una bomba es independiente de la naturaleza del líquido y, por tanto, la altura a la que impele una bomba es la misma, prescindiendo de la influencia que ejerce la viscosidad. d.- La potencia absorbida por la bomba es proporcional al peso específico del líquido elevado.

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
22
e.- El par requerido para el arranque de una bomba centrífuga es pequeño y la potencia absorbida durante su funcionamiento de régimen es continua y libre de sobrecargas, cuando la altura no varía y no hay perturbaciones ajenas a la bomba en la aspiración. f.- características propias de la instalación
Fig.16.8_6 En la figura se observan los componentes típicos de una instalación con bomba centrífuga, una característica importante es que requieren una tubería de cebado ya que no son auto aspirantes, se observa una tubería vertical por donde se introduce el fluido, abriendo la válvula de admisión y manteniendo abierta la línea de venteo; cuando el cebado esta completo, y la tubería de aspiración se llena el fluido sale por el venteo, en ese momento se cierran las dos válvulas, para que la bomba empiece a operar. También se puede conectar una bomba de vacío en la tubería de purga hasta que todo el aire contenido en la tubería de aspiración sea extraído. 16.8.2.- Funcionamiento en la industria. Las bombas centrífugas mueven un cierto volumen de líquido entre dos niveles; son pues, máquinas hidráulicas que transforman un trabajo mecánico en otro de tipo hidráulico. Los elementos constructivos de que constan son: a.- Una tubería de aspiración, que concluye prácticamente en la brida de aspiración. b.- El impulsor o rodete, formado por una serie de alabes de diversas formas que giran dentro de una carcasa circular en forma de caracol. El rodete va unido solidariamente al eje y es la parte móvil de la bomba.

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
23
El líquido penetra axialmente por la tubería de aspiración hasta el centro del rodete, que es accionado por un motor, experimentando un cambio de dirección más o menos brusco, pasando de axial a radial, (en las centrífugas), o permaneciendo axial, (en las axiales), adquiriendo una aceleración para comabiae su dirección y una sobrepresión y absorbiendo un trabajo.
Los alabes del rodete someten a las partículas de líquido a un movimiento de rotación muy rápido, siendo proyectadas hacia el exterior por la fuerza centrífuga, de forma que abandonan el rodete hacia la voluta a gran velocidad, aumentando su presión en el impulsor según la distancia al eje. La elevación del líquido se produce por la reacción entre éste y el rodete sometido al movimiento de rotación; en la voluta se transforma parte de la energía dinámica adquirida en el rodete, en energía de presión, siendo lanzados los filetes líquidos contra las paredes del cuerpo de bomba y evacuados por la tubería de impulsión.
Esquema del impulsor c.- La carcasa, (voluta), está dispuesta en forma de caracol, de tal manera, que la separación entre ella y el rodete es mínima en la parte superior; la separación va aumentando hasta que las partículas líquidas se encuentran frente a la abertura de salida; en algunas bombas existe, a la salida del rodete, una directriz de alabes fijos que guía el líquido a la salida del impulsor antes de introducirlo en la voluta.

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
24
La finalidad es la de recoger el líquido a gran velocidad, cambiar la dirección de su movimiento y encaminarle hacia la brida de impulsión de la bomba. La voluta es también un transformador de energía, ya que disminuye la velocidad (transforma parte de la energía dinámica creada en el rodete en energía de presión), aumentando la presión del líquido a medida que el espacio entre el rodete y la carcasa aumenta. La estructura de las bombas centrífugas es análoga a la de las turbinas hidráulicas, salvo que el proceso energético es inverso; en las turbinas se aprovecha la altura de un salto hidráulico para generar una velocidad de rotación en la rueda, mientras que en las bombas centrífugas la velocidad comunicada por el rodete al líquido se transforma, en parte, en presión, lográndose así su desplazamiento y posterior elevación. 16.8.3.- Clasificación general de las bombas centrífugas. En las bombas centrífugas la energía se comunica al líquido por medio de álabes en movimiento de rotación, a diferencia de las de desplazamiento volumétrico o positivo rotativas como las de engranajes, tornillos, lóbulos, levas, o las de desplazamiento positivo alternativas de pistón, diafragma etc, ya citadas. Las ventajas principales de las bombas centrífugas son: Caudal constante, presión uniforme, sencillez de construcción, tamaño reducido, bajo mantenimiento y flexibilidad de regulación. Uno de sus pocos inconvenientes es la necesidad de cebado previo al funcionamiento, ya que las bombas centrífugas, no son auto aspirantes. Bombas radiales, ,axiales y diagonales. Hemos considerado como bombas centrífugas al conjunto de las propiamente centrífugas o radiales, en las que la energía se cede al líquido esencialmente mediante la acción de la fuerza centrífuga, en las de tipo axial, la energía se cede al líquido por la impulsión ejercida por los álabes como empujadores.

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
25
En las bombas centrífugas radiales la corriente líquida se verifica en planos radiales, en las axiales en superficies cilíndricas alrededor del eje de rotación y en las diagonales se verifica radial y axialmente, denominándose también de flujo mixto. El tipo de una bomba, según esta primera clasificación, que atiende al diseño hidráulico del rodete impulsor, viene indicado por su velocidad específica en el punto de máximo rendimiento de la curva característica. El número específico de revoluciones Ns no varía para un impulsor determinado, aunque lo haga su velocidad de giro n, ya que Q y H se modifican también al mismo tiempo. Cada impulsor tiene una velocidad específica determinada, si bien ésta depende también del sistema difusor. El valor de Ns tampoco cambia al alterar las dimensiones absolutas de un impulsor; todos los impulsores de rendimiento aceptable que tienen una misma velocidad específica son geométricamente semejantes, aunque pueden tener ligeras variaciones en el ángulo de salida, forma del álabe, etc. La velocidad específica del impulsor es un índice de su geometría y proporciona una idea de sus dimensiones principales, que puede apreciarse en la Fig.16.8_6 . La relación entre los diámetros de entrada y salida d1 /d2, es, (dentro de ciertos límites) directamente proporcional a Ns y era uno de los índices utilizados antes de que se impusiera el concepto de velocidad específica. La forma de los álabes en los impulsores de flujo radial es, en general, curvada hacia atrás con respecto al sentido de giro, β2 < 90º , y con superficies de simple curvatura, siendo la generatriz paralela al eje de rotación; en los impulsores helicoidales, los álabes son de doble curvatura y en los axiales tienen, además, un determinado perfil aerodinámico.
Fig. 16.8_6 - Campos de aplicación de los tres tipos de bombas centrífugas
Rendimiento-Velocidad específica. En el extremo de las Ns bajas, las pérdidas por rozamiento son grandes, de la forma: a.- Pérdidas de carga debidas al más largo recorrido interno

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
26
b.- Pérdidas por rozamiento de las paredes del rodete impulsor de gran diámetro al girar en el líquido, (rozamiento del disco). Las pérdidas por fugas son también grandes. Al crecer la velocidad específica Ns el rendimiento mejora hasta un cierto valor de la misma, por encima del cual, pérdidas superiores de difusión y deficiencia en el guiado del líquido le hacen disminuir de nuevo, aunque de manera más suave. Los rendimientos óptimos se calculan para una velocidad específica Ns del orden de 50, Fig. 16.8_7, en la que la combinación de las pérdidas descritas, unas decrecientes y otras crecientes con Ns , tiene un efecto mínimo. El que bombas de igual velocidad específica pueda tener rendimientos diferentes, menores para caudales más bajos, se debe a que las leyes de semejanza hidráulica no se cumplen exactamente con tener sólo en cuenta la semejanza geométrica existente. En la actualidad, las curvas (rendimiento-velocidad específica) se van desplazando paulatinamente en sentido ascendente al ir consiguiendo la técnica bombas cada vez más perfeccionadas.
Figura 16.8_7 - Relación entre el rendimiento de diversas bombas centrífugas y su velocidad específica.

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
27
NOTAS COMPLEMENTARIAS 16.9.- Teoría elemental de la hélice tractora. La hélice tractora se debe considerar como una bomba de tipo axial, a diferencia de las bombas centrífugas, no utiliza el efecto de centrifugado del flujo dentro del rotor, si no que los álabes se comportan como perfiles aerodinámicos rotantes que impulsan el flujo según su dirección de entrada, aumentando su velocidad y creando un impulso por diferencia en la cantidad de movimiento en el pasaje del flujo a través del plano de la hélice, esto conduce a un aumento casi escalonado de la presión en el plano de la hélice entre la cara de salida del flujo y la de entrada. Las hélices se utilizan en aviones y helicópteros, generadores de viento, y ventiladores, en este caso el diseño se basa en obtener un flujo de caudal corriente arriba elevado más que en la obtención de una fuerza de empuje por diferencia de presión elevada. La hélice consta de un número variable de palas radiales igualmente espaciadas, normalmente dos o tres para hélices o rotores expuestos en flujo abierto, o más en el caso de los turbo ventiladores entubados o fans. La sección de cada pala para sus distintos cortes a distancias r del eje de giro, tienen forma de perfil aerodinámico cuya cuerda forma un ángulo θ con el plano de giro, que se denomina ángulo de calaje, este ángulo decrece con el radio hacia la punta o extremo de la hélice para mantener el valor relativo de la sustentación en cada elemento de pala en la dirección radial ya que la velocidad tangencial aumenta con el radio y el ángulo de ataque o incidencia debe disminuir, este efecto se denomina torsionado de la pala y define un ángulo del helicoide que puede ser constante o ir variando con el radio. Cada sección de perfil está definida por un área de base b dr donde b es la cuerda del perfil, definida como la longitud del segmento que une el borde de ataque y el de salida del perfil en cada posición. La rotación genera una sustentación propia dL perpendicular a la línea de la corriente relativa que la embiste. Esta sustentación integrada en la dirección normal al plano de rotación para todos los segmentos genera el empuje de tracción normal al plano de rotación de la hélice. En la Fig.16.9_1, se dan los elementos geométricos de la pala, el avance o paso se define para cada sección como θπ tan2 rh = , el avance por tanto es variable con r y con θ , por lo cual se define un corte particular AA, para una posición a 2 / 3 de R y un avance particular que se denomina “paso geométrico de la hélice” definido por:
ggrgh θπ tan2= donde ggr θ, , están definidos para r = 2/3 R.

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
28
Fig.16.9_1
La teoría elemental para hélice tractora fue introducida por Rankine y Froude, y está basada en la aplicación de las ecuaciones de continuidad, cantidad de movimiento lineal y energía, con la introducción de las siguientes hipótesis: a.- se supone que la hélice tiene un número infinito de palas y se idealiza como un disco circular de espesor diferencial con capacidad de variar la cantidad de movimiento del flujo. b.- la tracción está uniformemente repartida en el disco. c.- se desprecian los efectos rotacionales de la corriente debidos a la rotación de la hélice y el flujo se considera uniaxial e irrotacional. d.- cuando se establece una velocidad de traslación del móvil al que impulsa la hélice, normal al plano de rotación de la misma, las velocidades de rotación y traslación se componen, lo que define un ángulo de ataque o incidencia del perfil α menor al ángulo de calaje, como se observa en la Fig. 16.9_2
Fig.16.9_2
Se puede inferir a partir de la figura, que a medida que nos movemos de la raíz a la punta e la pala, la velocidad tangencial va aumentando a revoluciones constantes, ya que Vt = ω r por tanto el ángulo de calaje θ, debe disminuir de la raíz a la punta para mantener aproximadamente constante el ángulo de ataque del perfil con respecto a la corriente relativa, como ya dijimos, esto determina el torsionado de la pala.

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
29
Otro factor importante es el denominado factor de solidez de la hélice, que se define como: factor de solidez = área total de las palas proyectadas sobre el plano de rotación / área total del disco Las hélices usadas en aeronáutica poseen un factor de solidez bajo, típicamente 10%, y por el contrario las hélices marinas poseen un valor alto del orden de 80 a 90%, como se muestra en la Fig.16.9_2b
Fig. 16.9_2 a y b Por que son las geometrías de las hélices aeronáuticas y marinas tan diferentes ? No es porque el aire posea menor densidad que el agua, ya que ambos diseños se efectúan para rango de flujo incompresible. La razón es que el diseño de la hélice aeronáutica se aproxima mucho más al óptimo que las navales, y esto es así por que para la aeronave se dispone de la posibilidad que el disco de rotación sea relativamente mucho más grande que para un buque, el diámetro de las hélices navales está fuertemente limitado, pues el disco no debe proyectarse por debajo de la quilla o más allá de los costados del buque y esto implica que dado los caudales a mover, las palas deban incrementar su tamaño en los largos de perfil, aumentando así el factor de solidez y sacrificando parte de su rendimiento de diseño. La acción de una hélice de propulsión consiste en cambiar la cantidad de movimiento lineal del fluido que la rodea y así originar un empuje que se utiliza para propulsión. Las hélices no pueden proyectarse únicamente de acuerdo con la teoría de conservación de la c. de m. pero si esta teoría permite entender su principio básico de operación. Podemos considerar para el estudio la idea de relatividad de movimiento y suponer la hélice quieta axialmente pero rotando en un fluido que se mueve y acomete con una velocidad V1, como se muestra en la Fig.16.9_3, o desplazándose a izquierda en un fluido en reposo a una velocidad V1, también como dijimos el flujo se considera incompresible para la teoría simplificada. Como la operación que buscamos es obtener una fuerza de tracción, la teoría de la c de m, nos dice que es necesario que la corriente sea acelerada corriente abajo, la vena fluida entonces debe disminuir su sección gradualmente para no alterar el principio de conservación de masa, o postulado de continuidad. El fluido no se considera perturbado en la sección 1 ,después debido al trabajo de bombeo que realiza la hélice, la presión baja y el fluido se acelera en la sección de entrada al disco 3, entre la sección 3 y 4 que es el pasaje por el disco, la velocidad se mantiene aproximadamente constante pero la presión aumenta casi en escalón y vuelve a la presión atmosférica de flujo no perturbado en 2, en tanto se sigue acelerando hasta la sección 2, por lo cual hay un nuevo aumento de velocidad entre 4 y 2.

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
30
Fig.16.9_3
Si aplicamos cantidad de movimiento lineal entre 1 y 2, tenemos:
2 2 12 112 2R V A V Ax ρ ρ= − [16.9.1] en esta ecuación Rx es la fuerza reactiva que se debe aplicar al volumen de control para mantenerlo quieto, y es por tanto igual en magnitud a la fuerza tractora de la hélice que tiene el sentido opuesto; el flujo se considera como dijimos incompresible y por tanto los valores de la densidad a entrada y salida son iguales. Aplicando continuidad .
•== MAVAV 111222 ρρ [16.9.2]
Reemplazando este resultado en [16.9.1]
[ ]2 1R M V Vx•
= − [16.9.3] Sin embargo en esta ecuación , las áreas A1 y A2 no son conocidas, para salvar esto lo que hacemos es aplicar la ecuación de la c. de m. a través de la máquina, entre los puntos 3 – 4 y la ecuación de Bernuolli para las líneas de corriente del eje central entre los puntos 1 - 3 y 4 - 2, esto lo podemos hacer porque entre esos puntos, por una parte no estamos atravesando la máquina hidráulica en este caso la hélice, y por otro porque hemos considerado como primera aproximación que el flujo es ideal, e irrotacional. Ahora aplicamos cantidad . de movimiento. entre 3 y 4: tomamos en cuenta que para el recinto 3-4 que rodea la hélice es: 43 VV ≡ =V y que AAA == 43 entonces:
043 3 4[ ]4 3
p A p A RxR p p Ax
− + = →= −
[16.9.4]

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
31
energía simplificada o Bernuolli entre 1 y 3:
02
212313 =−
+− VVppρ
[16.9.5]
energía simplificada o Bernuolli entre 4 y 2:
02
222424 =−
+− VVppρ
[16.9.6]
sumando los resultados [16.9.5] y [16.9.6] y operando:
]2122[2134 VVpp −=− ρ [16.9.7]
Reemplazando en el resultado [16.9.4]
]2122[21]34[ VVAAppRx −=−= ρ
que entonces podemos igualar con el resultado [16.9.3], quedando:
→+−=−=−=•
]12][12[21]2122[
21]12[ VVVVAVVAVVMxR ρρ
1 [ ]2 12M A V Vρ•= + [16.9.8]
por continuidad el caudal másico a través de la hélice entre 3 y 4 será el mismo que para las otras posiciones, por tanto, podemos poner que:
2123 ]12[
21
3VVVVVVAAVM +
==→+==•
ρρ [16.9.9]
o sea la velocidad del aire a través de la hélice es el promedio de las velocidades ente la entrada y la salida. energía entre 1 y 2:
2
212212 VVppwe −+
−=−
ρ
como a la entrada y la salida las presiones se consideran no-perturbadas, atppp == 21 →
2
2122 VVew −=− [16.9.10]
como:
•
•
=M
Weew

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
32
la potencia entregada a la hélice es:
]2
2122[ VVMeW −=−
•• [16.9.11]
El signo negativo se corresponde con una potencia suministrada a la planta propulsora desde el medio ambiente. A su vez, la potencia que la hélice suministra al móvil (aeronave o buque) es (fuerza por velocidad):
1]12[1 VVVMVxRmW −==••
[16.9.12] y el rendimiento teórico:
]1V 2/[11
1212
111212
2/]12][12[1]12[
VVVV
VVVVV
VVVVVVV
We
WmΔ+
=Δ+
=−++
=+−
−== •
•
η [16.9.13]
El rendimiento de propulsión, está definido como la relación entre el trabajo útil entregado al móvil y el trabajo total entregado a la planta propulsora, por lo que también podrá estar definido como:
]12/[11
VVTVxR
We
WmΔ+
=== •
•
ωη [16.9.14]
En la cual T es el torque del motor en el eje de salida a la hélice, [Nm] y ω la velocidad angular [rad/seg], la expresión anterior, representa el rendimiento ideal de una hélice pero que nunca se alcanza en la práctica realmente, ya que se obtuvo en la hipótesis de que se invierte una parte de la energía en mover el fluido a la velocidad V es decir en incrementar su energía cinética [T.V]. Pero existen otras pérdidas de energía en la hélice real, debidas a: a.- resistencia de rozamiento en las palas. b.- energía necesaria para rotar la corriente en la dirección axial. c.-.pérdida de tracción hacia los extremos de manera que la tracción no está uniformemente distribuida en el plano de la hélice. El más importante de estos efectos es el primero, en los casos prácticos el rendimiento real es del orden de 85% del rendimiento ideal aproximadamente. Un examen del rendimiento ideal es por tanto una guía para poder anticipar cual será el rendimiento real de una hélice. Ejemplo 1.- Una pequeña aeronave de turismo vuela en condiciones de crucero a 105 nudos, a una altitud en que el aire se puede considerar con una densidad ρ =1.22Kg/m3, la velocidad que se ha registrado corriente abajo del disco de hélice es de 78 m/seg. y el diámetro barrido por ella es de 1.2m. Se pide calcular:: a.- el rendimiento teórico de la hélice. b.- el empuje producido. c.- la potencia que presenta la planta propulsora.

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
33
Rta. convertimos la velocidad a sistema MKS: 1 1 / 1,852 /Kt Milla Nautica hora Km h= = → 105 Kts = 105 . 1,852 / 3.6 = 54 m/seg como la velocidad V2 a la salida registrada es 78m/seg, la velocidad en el plano de la hélice es:
segmVVVVV /662
54782
2143 =+
=+
===
podemos ahora calcular el caudal másico a través del plano de la hélice:
segKgVAM /91]4/22.114.3[6622.1 ===•
ρ a.- El rendimiento teórico será entonces:
81.0108/]5478[1
112/]12[1
1]12/[1
1=
−+=
−+=
Δ+=
VVVVVη
b.- el empuje producido:
NVVMRx 2184]5478[91]12[ =−=−=•
c.- la potencia necesaria para la planta impulsora:
HPKwVxRmovilW 15775.0
7.1177.1175421841 ≡====•
Para un diseño de hélice óptimo, se podrá alcanzar del orden de 85% de la potencia del móvil teórica, por tanto, la planta motriz deberá tener una potencia real aproximada de:
HPHPW 7.18485.0/157 ==•
La potencia real con que fue equipado el avión, para este ejemplo un Cessna 172, es de 210 HP, ya que nuestro caso fue estudiado para condición y velocidad de crucero, la potencia necesaria resultó un poco menor aa la real necesaria de diseño, ya que siempre es necesario contar con un exceso de la potencia para las condiciones de despegue y maniobras, vuelo con carga máxima etc. 16.10.- Teoría elemental de las turbinas eólicas La hélice convertidora de energía eólica se debe considerar como una turbina de tipo axial. En principio como vimos, las bombas centrífugas pueden ser convertidas en turbinas centrífugas con pocos cambios, pero básicamente permutando la salida por la entrada, de esta forma el flujo acomete la máquina y se obtiene un trabajo mecánico de eje a la salida.
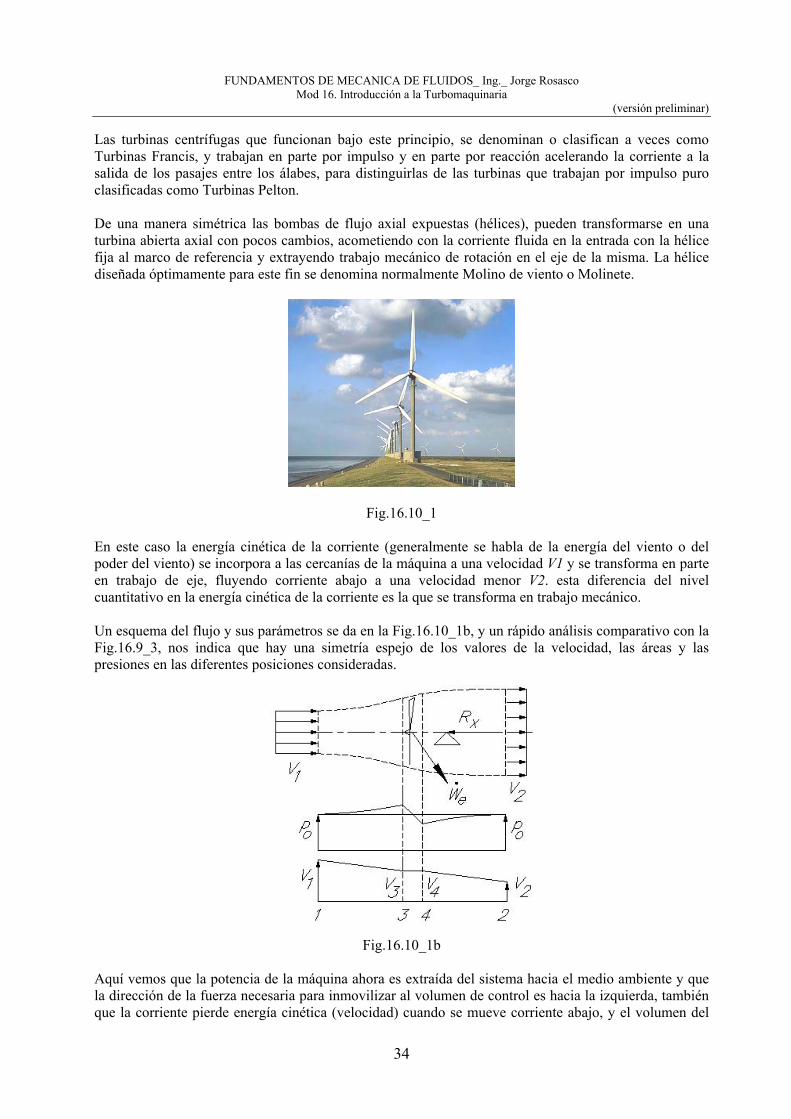
FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
34
Las turbinas centrífugas que funcionan bajo este principio, se denominan o clasifican a veces como Turbinas Francis, y trabajan en parte por impulso y en parte por reacción acelerando la corriente a la salida de los pasajes entre los álabes, para distinguirlas de las turbinas que trabajan por impulso puro clasificadas como Turbinas Pelton. De una manera simétrica las bombas de flujo axial expuestas (hélices), pueden transformarse en una turbina abierta axial con pocos cambios, acometiendo con la corriente fluida en la entrada con la hélice fija al marco de referencia y extrayendo trabajo mecánico de rotación en el eje de la misma. La hélice diseñada óptimamente para este fin se denomina normalmente Molino de viento o Molinete.
Fig.16.10_1 En este caso la energía cinética de la corriente (generalmente se habla de la energía del viento o del poder del viento) se incorpora a las cercanías de la máquina a una velocidad V1 y se transforma en parte en trabajo de eje, fluyendo corriente abajo a una velocidad menor V2. esta diferencia del nivel cuantitativo en la energía cinética de la corriente es la que se transforma en trabajo mecánico. Un esquema del flujo y sus parámetros se da en la Fig.16.10_1b, y un rápido análisis comparativo con la Fig.16.9_3, nos indica que hay una simetría espejo de los valores de la velocidad, las áreas y las presiones en las diferentes posiciones consideradas.
Fig.16.10_1b
Aquí vemos que la potencia de la máquina ahora es extraída del sistema hacia el medio ambiente y que la dirección de la fuerza necesaria para inmovilizar al volumen de control es hacia la izquierda, también que la corriente pierde energía cinética (velocidad) cuando se mueve corriente abajo, y el volumen del

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
35
conducto fluido se expande para mantener las condiciones que impone la continuidad. Una caída bastante súbita en la presión se produce a través del disco del conversor eólico convergiendo después corriente abajo, nuevamente a la presión atmosférica Po. Las ecuaciones referidas al conversor, se obtienen en forma similar al caso anterior: continuidad entre 1 y 2
1 1 1 2 2 2 1 1 2 2V A V A V A V Aρ ρ ρ ρ= → = [16.10.1] c. de m. lineal entre 1 y 2:
2 2 [ 2 1]2 2 1 1Rx V A V A M V Vρ ρ•
− = − = − [16.10.2] c. de m. lineal entre 3 y 4:
AppRxxRApAp
]43[04433
−=→=−−
[16.10.3]
siendo A=A3=A4, V3=V4 ecuación de la energía entre 1 y 2
]2221[21
2
2122 - 2
2122 VVMeWVVM
eWVVew −=→
−=→
−=−
••
•
•
[16.10.4]
ecuación de la energía entre 1 y 3
02
212313 =−
+− VVppρ
[16.10.5]
ecuación de la energía entre 4 y 2
02
242242 =−
+− VVppρ
[16.10.6]
sumando y operando con las [16.10.4] y [16.10.5] y considerando que 43 VV ≡ :
]2221[2143 ]2122[
2134 VVppVVpp −=−→−=− ρρ [16.10.7]
y comparando [16.10.2] y [16.10.7]
AppRx ]43[ −= → →−=−•
]2221[21]21[ VVAVVM ρ
]21[21
3]21][21[21]21[3 VVVVVVVAVVAV +=→+−=− ρρ [16.10.8]
o sea la velocidad en el disco es el promedio de las velocidades lejanas corriente arriba y corriente abajo.

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
36
El trabajo por unidad de tiempo extraído desde el disco del molino será:
]21[]21[23]21[3 VVVVMVVVMVxRmW +−=−==•
••
y como
AVM 3ρ=•
resulta:
]21][2221[41]21][21[]21[
41 VVVVAVVVVVVAmW +−=++−=
•ρρ [16.10.8b]
Para una dada velocidad de viento corriente arriba V1, podemos encontrar la máxima potencia extraible del molino, diferenciando la expresión anterior respecto de V2 e igualando a cero, así obtenemos:
31278(max) AVWm ρ= con 13
12 VV = y que corresponde a 13
243 VVVV ===
Trabajando con la expresión [16.10.8b]
→−−+=−−+=•
]31
3221
22121[314
1]3212222131[41
VV
VV
VVAVVVVVVVAWm ρρ
]121][21
221[3141
VV
VVAVmW +−+=
•ρ [16.18.8c]
Por otra parte definimos potencia aerodinámica como la máxima potencia que acarrea la corriente que se dirige al impacto con el disco del molino, y esto es la energía cinética del tubo de corriente por unidad de tiempo.
3121212
1 AVMVoW ρ==••
y el coeficiente de potencia como el adimensional:
== •
•
Wo
WmCp ]121][21
221[21
VV
VV
+− [16.10.9]
por la nomenclatura no se debe confundir con el coeficiente de presión, finalmente el rendimiento:
2)1/2(11
]2221[2/
212/VVVVM
VM
We
Wm−
=−
==•
•
•
•
η [16.10.10]
de este resultado, se observa que el rendimiento aumenta cuando V2→0, sin embargo hacer V2=0 implica la eliminación de la corriente lo cual no dejaría funcionar al molino, por eso se debe buscar una relación V2/V1 que haga máximo al rendimiento con V2 ≠ 0.

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
37
16.10.1.- Teoría de optimización de Albert Betz. Albert Betz en conjunto con Ludwig Prandtl y Hermann Glauert son considerados los padres de la aerodinámica moderna, en los años previos a la primera guerra mundial entre 1908 y 1912, los dos primeros trabajaron en el laboratorio de la Universidad Karl Wilhem de Gottingen , obteniendo los resultados prácticos que permitieron explicar los mecanismos que relacionan la viscosidad, la capa límite, y la separación, con la circulación ligada sobre el perfil aerodinámico, sin contradecir el teorema Kelvin – Helmholtz. Vinculando esto con los desarrollos teóricos de Martin Kutta y Nikolai Joukowsky la teoría permitió explicar la aparición de la resistencia de arrastre, y el comportamiento previsible del ala de envergadura finita y de hélices. Ahora podemos resumir los resultados de estos desarrollos más fácilmente, a través de la representación gráfica o la búsqueda de máximos y mínimos en la expresión [16.10.9], en la que se grafica Cp como función de la relación [V2/V1]. En la Fig. 16.10_2 se da un esquema de esta representación , observando que para V2/V1=0 → Cp=0.5, y que para V2/V1=1 → Cp=0. Si llamamos con la letra griega ν a V2/V1, resulta que:
,33.00 =→= ννd
dCp [16.10.11]
con lo cual
16 / 27 0.593 0.6(max)Cp = = ≈ →
aplicando la ecuación [16.10.8c]:
16 1 83 3 3 2 3 3 20.296 0.296 1,23 0.281 1 1 1 127 2 27 4W AV AV AV D V V Dm
πρ ρ ρ•
= = = ≅ = [16.10.12]
donde hemos llamado D al diámetro del disco que subtiende el área A. barrida por el molino:.
Fig.16.10_2

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
38
El valor indicado anterior, es la máxima potencia teórica que a través del molino puede extraerse de la corriente, la forma óptima de acercarse al valor teórico, es tratando de optimizar el diseño de la planta de conversión de energía eólica o molino. Dos conclusiones interesantes para el análisis a partir del resultado de la [16.10.12] es que al reemplazar en la [16.10.8], se obtiene:
1 2 0.663 12
V VV V+= = [16.10.13]
0.332 1V V= Son las velocidades que permiten definir geométricamente el ducto de la Fig.16.10_1b partir de conocer la velocidad de la corriente de acometida y hacer el cálculo teórico de la potencia extraída de la corriente aplicando la ecuación integral de la energía, y la fuerza que la corriente ejerce sobre el disco aplicando la ecuación integral de la c. de m. lineal , con el propósito del diseño del mástil. 16.10.2.- Aerodinámica de las palas de molinos eólicos. En la Fig.16.10_3, se ve una representación indicando que la geometría de la pala del molino es simétrica con respecto a la hélice tractora en referencia al ángulo de calaje referido al plano de rotación, siendo el sentido de rotación igual en ambos casos así como el sentido de la corriente relativa de acometida. El diseño básico de las palas del molino, por tanto se basa en los mismos principios que refieren a la teoría básica e los perfiles aerodinámicos.
Fig.16.10_3
Para un ángulo de incidencia de la corriente α, se defina una fuerza neta R, que se puede descomponer en dos componentes, una normal a la dirección relativa de la corriente, denominada sustentación L, y otra en la dirección de la incidencia denominada arrastre D. Fig.16.10_4.

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
39
Fig.16.10._4
El ángulo de incidencia está definido por la dirección de la corriente y por el segmento recto que une el borde de ataque y el borde de salida del perfil, este segmento se denomina habitualmente como “cuerda” del perfil, y se indica con la letra c. Si b es el ancho en profundidad del perfil, en la dirección z, la suma extendida de las áreas diferenciales dA =c db, se denomina área base del perfil, y tanto la sustentación como el arrastre totales se definen tomando esta área de base como referencia a través de:
→= AVRCR 221 ρ
AVLCL 221 ρ=
AVDCD 221 ρ=
Como vimos anteriormente en el módulo 10, tanto CL como CD son funciones del nº Re, y se obtienen empíricamente para cada tipo de perfil por recolección de datos de ensayo en túnel, en función del ángulo de incidencia, también a veces se disponen de gráficas de CL vs CD que se denominan gráficas polares del perfil. Estos gráficos para el caso de máquinas eólicas se definen para el rango:
610.5Re610.5.0 ≤≤ A diferencia de un perfil de ala simple, un perfil en rotación requiere de la composición de la velocidad de acometida del viento sobre el disco V =V3=V4 y la velocidad relativa que se genera con la rotación – u esta velocidad relativa se indica como Vr (Fig.16.10-3), y que para una terna situada en la pala tiene dirección contraria a esta u = ωr. En la figura siguiente 16.10_5, se observa con más detalle la composición de estas velocidades. Así quedan definidos los siguientes parámetros: CL, y CD , que son específicos para cada: α, ángulo de incidencia o ataque. θ, ángulo de calaje, o ángulo constructivo, que es fijo para cada radio, en algunos diseños puede variar colectivamente para toda la pala, (paso variable). φ , ángulo relativo, varía para cada estación o posición fija de la pala con las variaciones de ω y V y por supuesto es diferente para cada estación de la pala, como: φθαφθα −=+→=+++ 90º180º90 .
φω
λ tgV
rVu
fe === , velocidad específica en r, o velocidad específica efectiva.
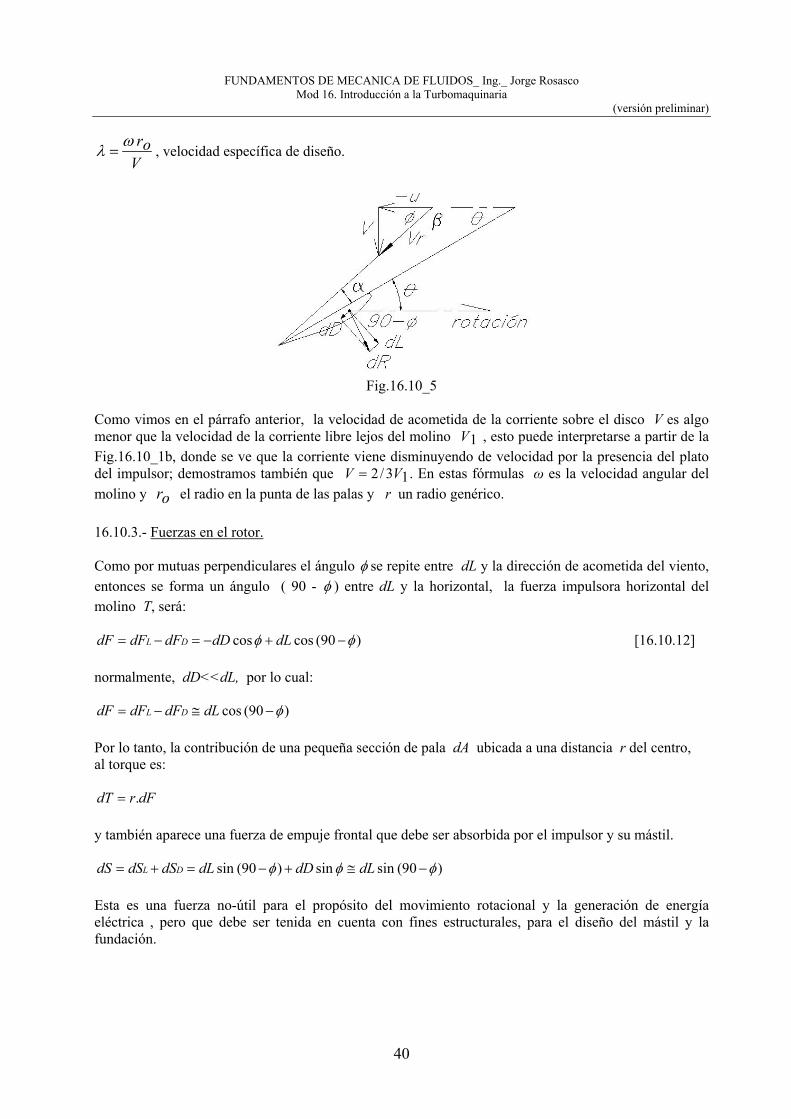
FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
40
roVωλ = , velocidad específica de diseño.
Fig.16.10_5
Como vimos en el párrafo anterior, la velocidad de acometida de la corriente sobre el disco V es algo menor que la velocidad de la corriente libre lejos del molino 1V , esto puede interpretarse a partir de la Fig.16.10_1b, donde se ve que la corriente viene disminuyendo de velocidad por la presencia del plato del impulsor; demostramos también que 13/2 VV = . En estas fórmulas ω es la velocidad angular del molino y ro el radio en la punta de las palas y r un radio genérico. 16.10.3.- Fuerzas en el rotor. Como por mutuas perpendiculares el ángulo φ se repite entre dL y la dirección de acometida del viento, entonces se forma un ángulo ( 90 - φ ) entre dL y la horizontal, la fuerza impulsora horizontal del molino T, será:
)90(coscos φφ −+−=−= dLdDdFdFdF DL [16.10.12] normalmente, dD<<dL, por lo cual:
)90(cos φ−≅−= dLdFdFdF DL Por lo tanto, la contribución de una pequeña sección de pala dA ubicada a una distancia r del centro, al torque es:
dFrdT .= y también aparece una fuerza de empuje frontal que debe ser absorbida por el impulsor y su mástil.
)90(sinsin)90(sin φφφ −≅+−=+= dLdDdLdSdSdS DL Esta es una fuerza no-útil para el propósito del movimiento rotacional y la generación de energía eléctrica , pero que debe ser tenida en cuenta con fines estructurales, para el diseño del mástil y la fundación.

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
41
16.10.3.- Bases para el diseño de las palas del molino. La utilización de la energía del viento, requiere el desarrollo de medios que permitan convertir esa energía en formas más útiles de la misma. Esto típicamente se realiza convirtiendo primero la velocidad uniaxial de la corriente en movimiento rotacional utilizando el molino, y luego convirtiendo la energía rotacional del mismo en energía eléctrica usando un generador o un alternador. En los párrafos anteriores, se describió el molino como un dispositivo mecánico capaz de convertir parte de la energía cinética de la corriente en energía rotacional a través de las palas en movimiento rotacional. Esto es realizado para una velocidad de viento dada, manteniendo las palas orientadas a un ángulo θ determinado respecto al plano de rotación de manera que al pasar la corriente a través de las palas ejerce una fuerza aerodinámica en ellas que causa el efecto de rotación al estar vinculadas a un eje central. Se tiene en cuenta que este ángulo, no solamente es específico para cada condición de viento sino que para una condición de viento dada debe variar según el radio de la pala, al efecto de compensar el aumento de velocidad tangencial y mantener constante el ángulo de incidencia, esto define una variación de θ con el radio de la pala, que se llama ángulo de torsionado de la pala. Paralelamente, como se ve en la figura 16.10_5, que el valor nominal de la componente Vr, va aumentando con el radio, ya que también lo hace la componente u , por lo cual la cuerda de los perfiles debe ir disminuyendo hacia la punta si se requiere que la carga del plano del molino se mantenga constante. esta es la razón del afinamiento de la pala hacia los extremos del disco, Fig. 16.10_1. La pregunta que naturalmente surge es: a que ángulo respecto al plano de rotación las palas deberán regularse?, será este el ángulo más adecuado? Esto por supuesto implica un problema de optimización, que nos permita decidir sobre la performance del molino. Para este fin nos conviene definir la eficiencia de potencia η del molino como la razón entre la potencia desarrollada por el molino, como consecuencia de la acción aerodinámica en las palas con la potencia desarrollada por la energía cinética de la corriente en el tubo de sección transversal igual al área frontal barrida por el molino. En esta relación, la potencia desarrollada por el molino, es el producto del torque trasmitido en su eje central, y la velocidad angular de las palas
ωTmW =•
por su parte la potencia desarrollada por la corriente es:
AVVAVwW 3121
1]2121[ ρρ ==
•
donde V1 es la velocidad de la corriente lejos del molino, ρ la densidad y A el área transversal del plano del tubo de corriente, entonces:
AVT
31
2ρ
ωη = 16.10.13
Debemos notar que V1 es la velocidad de la corriente lejana, y la velocidad que incide en el plano de rotación del molino es V3, que, para simplificar la notación ahora llamamos V .

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
42
H. Glauert ha mostrado que V es idealmente 2/3 = 0.66 de la velocidad corriente arriba lejana V1= ∞V . expresión: [16.10.13]. Esto es cierto si se ignora la perdida de energía por el sistema turbillonario corriente abajo y la pérdida debida a la fricción turbulenta. Entonces, el problema de optimización que debemos explorar es: dada la velocidad de la corriente lejana V1, el área frontal barrida por el molino A, y la velocidad angular ω , cual deberá ser el ángulo de incidencia o indirectamente, el ángulo de calaje de las aspas al efecto de obtener la máxima eficiencia η. Sin embargo, este problema propuesto, no ha sido resuelto aun satisfactoriamente, mientras H. Glauert, ha mostrado que la máxima potencia que puede extraerse de una corriente según vimos, [16.10.12] es:
23128.023122.0]3121[56.0]312
1[169 DVDVAVAVmW ====
•ρρρ [watts]
una fórmula empírica debida a Betz , recorta esta potencia aproximadamente un 50% a un valor :
23115.0 DVmW =•
[watts] estos resultados están basados en la aplicación de la ecuación de energía, pero este análisis global no muestra como deberían diseñarse las palas al efecto de trasmitir la máxima potencia posible al movimiento rotacional. 16.10.4.- Método de análisis Para lo que sigue nos hemos guiado por los trabajos del Profesor : Martin Hischke de la Universidad de Oklahoma USA. Para avanzar, la eficiencia η y la forma de la pala deben ser relacionados, para hacer esto nosotros usaremos algunas conclusiones de la teoría de los elementos de pala en el cual, cada segmento diferencial según el radio de la de la pala desde la raíz hasta la punta es tratado como un perfil aerodinámico con valores conocidos de los coeficientes de sustentación y arrastre DCLC , . Entonces, la fuerza de sustentación de la sección diferencial, dL y la fuerza de arrastre, dD, que actúan en un elemento de la pala del molino, de largo dr y ancho de cuerda b( r), a una distancia r del centro de rotación, están dados por:
221][ rVLCbdrdL ρ= [16.10.14]
2
21][ rVDCbdrdD ρ= [16.10.15]
Aquí b( r ), es el ancho del perfil o cuerda, y Vr la resultante del viento relativo para el radio r. La resultante Vr, tiene componentes que provienen de la velocidad del viento V reducida al plano del molino y la velocidad rotacional de la pala ω r , la Fig.16.10_5, que repetimos aquí muestra esto para un radio genérico r.

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
43
Fig.16.10_5
entonces:
2 2[ ]Vr V rω= + [16.10.16] remarcamos que V en esta fórmula, es la velocidad del viento que incide en el plano de rotación del molino, El ángulo de entrada de flujo efectivo se define como:
][1tanr
Vω
φ −= [16.10.17
El ángulo de ataque es α y el ángulo de calaje de la pala relativo al plano de rotación es θ, entonces:
αφθ −= [16.10.18] esto surge de que:
αφθφαθφβφβ
βαθ
−=→=−++→−=→=+
=++
180)180(180180
º180
Para una dada velocidad angular ω y una velocidad de incidencia de viento en disco V , φ es una función conocida de r a través de la ecuación [16.10.17], el ángulo de la pala θ es entonces una función de r a través de la ecuación [16.10.18], una vez que el ángulo α es conocido. Es el ángulo θ el que debe ser conocido al efecto del diseño y construcción de las palas del molino. Para ω y V dedos lo que se hace es determinar α( r ) y θ ( r ), tomando α de manera que sea la función que maximice el rendimiento η. La componente de la fuerza resultante dR, que tiende a rotar la pala es dF, como vimos es [16.10.12]:
)90(coscos φφ −+−=−= dLdDdFdFdF DL

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
44
como:
→=+=− φφφφ sinsin90sincos90cos)90(cos
φφ sincos dLdDdFdFdF DL +−=−= y entonces el torque dT = r dF , viene dado por:
]cos.sin[221 φφρ DCLCVrdrbrdT −=
como:
φφ
sinsin VVrrVV =→=
reemplazando en la anterior:
]cos.sin[2sin12
21 φφ
φρ DCLCVdrbrdT −=
tomando en cuenta la contribución de todos los elementos de pala, definimos la suma extendida a todos ellos entre r = 0 y r = ro y obtenemos el torque total:
1 [ sin cos ]222 sin0
L Dro C CT V z r b drφ φρ
φ−
= ∫ [16.10.19]
Donde z es el número de palas y ro el radio de la pala, entonces nuestra expresión para η, [16.10.13] resulta, llamando:
0 0 ; 1
1
r r r rorod dr r dodr ro
ξ ξ ξ
ξ ξ
= = → = = → =
→ ==
entonces:
1 1
0 0
22 2 1/ 2 [ sin cos ] [ sin cos ]23 3 2 2 2( ) sin sin
L D L DT V z C C z C Cb r d b doV A V r Voω ω ρ φ φ ω φ φη ξ ξ ξ ξ
ρ ρ π φ π φ− −
= = =∫ ∫
y tomando en cuenta que:
RVT
=ω
1 1
0 0
[ sin cos ] [ sin cos ]2 2sin sin
TL D L Dz C C V z C C bb d dV V roω φ φ φ φη ξ ξ ξ ξπ φ π φ
− −= =∫ ∫

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
45
y finalmente:
1
0
[ sin cos ] ( )2sinL DC C bz dro
λ φ φη ξ ξπ φ
−= ∫ [16-10.20]
donde λ = [velocidad tangencial de punta de pala / velocidad de la corriente] , la habíamos definido como la velocidad específica de diseño:
TV roV V
ωλ = =
Si nosotros fijamos (parámetros de diseño): - el número de palas z, - el ancho de pala para cada sección o cuerda b , - la designación del perfil aerodinámico, - el radio de punta de pala ro , - la velocidad angular ω, - la velocidad de la corriente V Entonces η depende solamente de la variación del ángulo de ataque α, con el radio, ya que CL y CD son funciones solamente de α para un perfil de sección dado. La figura siguiente, Fig.16.10_6, presenta las gráficas de la polar CL vs CD , a la izquierda, y del coeficiente de sustentación CL vs α, a la derecha, para una sección típica (NACA 4424), estos gráficos muestran la variación lineal de CL con α para pequeños ángulos de ataque, alcanzando un máximo típico de CL =1.4 , para el valor de ángulo de ataque de perdida y decreciendo luego en la región de pérdida. El valor de CD , se incrementa de forma cuadrática para pequeños α, pero a medida que α se incrementa la relación deja de ser cuadrática.
Fig.16.10_6

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
46
De la ecuación [16.10.19], se ve que para maximizar η se deberá maximizar el factor I definido como:
φφ cossin DCLCI −=
diferenciando esta expresión, respecto de α e igualando a cero, obtenemos los máximos:
0][tancos =−α
φφd
LdC
LdCDdC [16.10.21]
la solución de la ecuación [16.10.21] es:
rV
LdCDdC
ωφ == tan [16.10.22]
de donde obtenemos φ , la otra solución, 0/ =αdLdC , está incluida en la ecuación [16.10.22] ya que en este caso LdCDdC / es infinito , y º90=φ . Observamos ahora la figura Fig.16.10_7 que es la misma que la 16.10_6 en la que se trabaja con los ángulos de incidencia relativos al perfil para cada radio. La obtención del ángulo de ataque óptimo para cada radio r se realiza buscando el punto en que la pendiente complementaria es tangente a la función CL = f(CD) como se indica a continuación:
Fig.16.10_7
1.- encontramos que punto sobre la polar CL vs CD de la izquierda, el ángulo entre la tangente local y la dirección vertical igual a ][1tan
rVω
φ −= , la escala del eje CD ha sido exagerada en la Fig.16.10_7, y
la hemos multiplicado por razones de claridad por un factor de 10, entonces la tangente del ángulo ´φ es 10 veces la tangente de φ . Este punto ha sido indicado como A en la figura.

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
47
2.- una línea horizontal se traza desde A hacia la gráfica de la derecha, de CL vs α, y se determina el punto B : entonces bajamos hasta el eje de α, y este punto, C determina el ángulo de ataque óptimo para el radio r. 3.- una construcción similar para cada estación a lo largo de la pala indicará los diversos ángulos, para la variación con el radio r obteniendo los ángulos de incidencia que maximizan el η.
Un resultado típico de la variación del ángulo de ataque óptimo con el radio, se muestra en la Fig.16.10_8 para el perfil (NACA 4424) y para las razones de velocidad específica de diseño λ tomada como parámetro para valores, 2,4, y 6.
Fig.16.10_8
La variación del ángulo de ataque para λ = 6, corresponde al rango de coeficientes de sustentación comprendidos entre los puntos D y E de la Fig.16.10_7 y a una variación del ángulo de ataque entre 17.4º en la raíz hasta 14. 3º en punta. El óptimo ángulo de la pala θ(optimo), se deduce como:
optrV
opt αω
θ −−= ][1tan
Si , ro
Vωλ = cambia, el ángulo de corriente interno φ cambia y también lo hace α (optimo).
Mantener los ángulos θ y θ (óptimo) para distintos valores de λ será dificultoso en la práctica ya que requiere que el ángulo de torsión varíe con λ, y por tanto con la velocidad neta de acometida en el plano del molino. Esto requeriría lo que se denomina diseño de forma anamórfica de pala, o sea que el molino efectúe el sensado de de la velocidad V y automáticamente adapte toda la torsión de las palas a la nueva condición óptima. Esto resulta sumamente dificultoso en las presentes condiciones de la tecnología, no obstante el autor de estas notas de cátedra, ha diseñado una pala con este concepto, que está a la espera (tal vez infructuosa) de alguna Universidad que esté interesada en financiar una línea de investigación para este proyecto. Actualmente lo que se hace en la práctica es optimizar θ para una razón particular de tipo estadístico de λ [velocidad de punta / velocidad de viento], y aceptar un θ no-óptimo para otras condiciones.

FUNDAMENTOS DE MECANICA DE FLUIDOS_ Ing._ Jorge Rosasco Mod 16. Introducción a la Turbomaquinaria
(versión preliminar)
48
Para otras secciones de perfil se requiere contar con la data de CL vs CD y CL vs α, para determinar el ángulo óptimo, esta data se obtiene normalmente de la literatura, y si la data no se dispone, será necesario aplicar un programa de túnel de viento, ya que la teoría aerodinámica linealizada para perfiles, no es aplicable en la región de inicio de pérdida, que como se observa en la Fig.16.10_7, es donde caen los ángulos óptimos. La teoría elemental de perfiles y la data publicada, es aplicable si se asumen condiciones sin interferencia, el análisis anterior se corresponde entonces con aceptar que no hay interferencia entre las palas del molino. Esto puede considerarse válido si la razón de solidez del molino (o de hélice) que es la razón entre “suma de las áreas proyectadas de las palas en el plano de rotación / área barrida por el disco” no supera 0.1, si el factor de solidez excede 0.1, el coeficiente de sustentación máximo desciende en algunos casos significativamente, por ejemplo para un factor de 0.4, el coeficiente decrece tanto como un 45 %; de manera que lo indicado es válido para molinos de solidez pequeña, como es el caso de los molinos eólicos para generación de energía. La figura esbelta de los molinos típicos Fig.16.10_1, ilustra esta cuestión y muestra que la facilidad de diseño se obtiene para razones de solidez muy bajas. []