MECANISMOS. Definición Los mecanismos son elementos destinados a transmitir y transformar fuerzas y...
86
MECANISMOS
-
Upload
celia-sosa-gutierrez -
Category
Documents
-
view
227 -
download
0
Transcript of MECANISMOS. Definición Los mecanismos son elementos destinados a transmitir y transformar fuerzas y...

MECANISMOS

Definición
Los mecanismos son elementos destinados a transmitir y transformar fuerzas y movimientos desde un elemento motriz (motor) a un elemento receptor. Permiten al ser humano realizar determinados trabajos con mayor comodidad y menor esfuerzo.

Definición de Mecanismo
Un mecanismo es una combinación de cuerpos rígidos o resistentes, arreglados de tal manera y enlazados de una forma tal que se mueven uno con respecto a los demás con movimiento relativo definido

Definición MáquinaUna máquina es un mecanismo o conjunto
de mecanismos que transmiten fuerza desde una fuente de energía hasta la resistencia por vencer

Definición Motor
El motor es un convertidor de energía

Clasificación de Movimientos Movimiento plano
Traslación rectilínea. Cuando las trayectorias de las partículas que lo forman son líneas rectas.
Movimiento alternativo o reciprocante. El cuerpo se mueve entre 2 posiciones extremas. Cuando el cuerpo se mueve hacia atrás y adelante en esta forma se dice que oscila como en el caso de la corredera del mecanismo biela – manivela – corredera
Traslación curvilínea. Cuando las trayectorias de las partículas del cuerpo son idénticas paralelas a un plano fijo. Mecanismo que conectó las ruedas motrices de la locomotora de vapor

Clasificación de Movimientos Rotación. Se dice que un cuerpo rígido que
tiene movimiento plano, tiene movimiento de rotación, si cada punto del cuerpo permanece a una distancia constante de un eje fijo, el cual es perpendicular al plano de movimiento. Si el cuerpo se mueve en vaivén se dice que oscila.
El balancín que opera las válvulas en un motor de automóvil tiene movimiento de rotación oscilatorio.

Clasificación de MovimientosRotación y traslación. Es una
combinación de los movimientos anteriormente citados. La biela de un motor de automóvil.

Clasificación de MovimientosMovimiento tridimensionalMovimiento helicoidal. Cuando un
cuerpo rígido se mueve de tal manera que cada punto del cuerpo tiene movimiento de rotación alrededor de un eje fijo y al mismo tiempo movimiento de traslación paralelo al eje.

Clasificación de MovimientosMovimiento esférico. Cuando un cuerpo
rígido se mueve de tal forma que cada punto del cuerpo tiene movimiento alrededor de un punto fijo mientras permanece a una distancia constante de él. Rótulas de la suspensión de automóviles. Cierto tipo de rodamientos o baleros

Movimiento
Bidimensional
Traslación
Rectilínea Alternativo. Oscilación
Curvilínea Alternativo. Oscilación
Rotación Oscilación
Traslación-Rotación
Tridimensional
Helicoidal
Esférico

Transmisión de MovimientoPor contacto directo entre 2 miembros
tal como entre una leva y su seguidor o entre 2 engranes
A través de un eslabón intermedio o biela
Por medio de un conector flexible tal como una banda o una cadena

Transmisión de Movimiento
Transmisión de Movimiento
Por contacto directo
Eslabón intermedio
Conector Flexible

CicloCiclo. Se dice que las partes de un
mecanismo han completado un ciclo de movimiento cuando han pasado por todas las posiciones posibles que pueden tomar después de iniciado el movimiento a partir de algún conjunto de posiciones relativas simultáneas y han regresado a sus posiciones relativas originales
PeríodoPeríodo. El tiempo necesario para
efectuar un ciclo de movimiento se le conoce como período
Fase de movimientoFase de movimiento. Las posiciones
relativas simultáneas de un mecanismo en cualquier instante durante un ciclo de movimiento constituyen una fase
ParesPares. A las formas geométricas por
medio de las cuales dos miembros de un mecanismo se mantienen en contacto de tal manera que el movimiento relativo entre ellos sea consistente
Par InferiorPar inferior. Si la unión por medio de la
cual dos miembros se conectan se realiza a través de una superficie tal como una unión de pasador, o perno se conoce como acoplamiento inferior

Par SuperiorPar Superior. Si la conexión entre dos
miembros tiene lugar en un punto o a lo largo de una línea tal como un balero o entre dos engranes en contacto se le conoce como acoplamiento superior.
Par de RevoluciónUn par que permite solamente el
movimiento relativo giratorio es un Par de Revolución o de giro (acoplamiento)
Un par de Revolución o de giro puede ser inferior o superior dependiendo de que se emplee un perno y buje o un cojinete de bolas para la conexión.
Par deslizanteUn par que solo permite el
deslizamiento es un par deslizante.Un par deslizante es un par inferior
como entre un émbolo y la pared del cilindro

EslabónEslabón. Es un cuerpo que tiene dos o
más elementos de acoplamiento con otros tantos eslabones por medio de los cuales puede conectarse a otros cuerpos con el fin de transmitir fuerza o movimiento. Por lo general, un eslabón o unión es un miembro rígido que tiene en ambos extremos la posibilidad de conectarse a otros dos eslabones.

EslabónEslabón. Cuerpo rígido que posee al
menos dos nodos, que son los puntos de unión con otros eslabones. El número de nodos le da su nombre al eslabón:
Binario = dos nodosTerciario = tres nodosetc.

Clasificación de Eslabones
Eslabón
Rígido o cinemático. (tensión y
compresión)
Flexible
Tensión (Cadena, polea, chicote, etc.)
Compresión (fluido)

Cadena CinemáticaEs un ensamble de eslabones y juntas
interconectadas de modo que proporcionen un movimiento de salida controlado en respuesta a un movimiento de entrada proporcionado

Cadena Bloqueada
Si los eslabones se conectan de tal forma que el movimiento relativo entre ellos sea imposible, resulta una armadura o cadena bloqueada
Cadenas Restringidas
Cadenas restringidas o constreñidas. Cuando los eslabones se conectan de tal forma que a pesar de cualquier número de ciclos de movimiento que ocurran, el movimiento relativo entre ellos siempre será el mismo

Cadena No RestringidaSi los eslabones se conectan de tal
forma que el patrón de movimiento varíe de un instante a otro dependiendo de la cantidad de fricción presente en los acoplamientos, el resultado es una cadena no restringida o libre.

Cadenas Cinemáticas
Cadena Cinemática
Bloqueada
Restringida (Mecanismos,
caso particular)
No restringida o libre

Mecanismos y EstructurasLa movilidad de un mecanismo es el
grado de libertad (GDL) que poseeLa movilidad es el número mínimo de
parámetros independientes requeridos para especificar la posición de cada uno de los eslabones de un mecanismo

Mecanismos y EstructurasEl grado de libertad (GDL)
Mecanismos y EstructurasLos grados de libertad de un ensamble
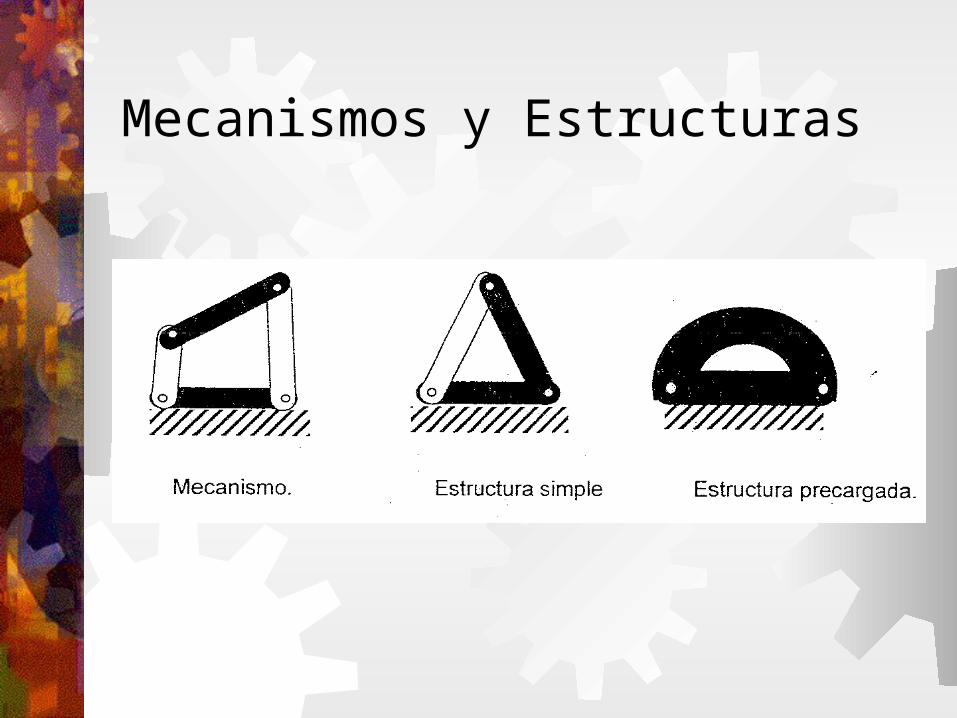
de eslabones predicen por completo su carácter y hay solo 3 posibilidades.
Si el Grado de Libertad (GDL) es positivo se tendrá un mecanismo y los eslabones tendrán movimiento relativo.
Mecanismos y EstructurasSi el GDL es exactamente igual a cero,
entonces se tendrá una estructura y ningún movimiento es posible.
Si el GDL es negativo entonces se tendrá una estructura precargada, lo que significa que ningún movimiento es posible y algunos esfuerzos pueden estar presentes.
Mecanismos y Estructuras

Grados de Libertad
Positivo
Cero
Negativo

Mecanismos y EstructurasLas estructuras simples y las
estructuras precargadas por lo general se utilizan en ingeniería. De hecho, la estructura real con GDL igual a cero es rara en la práctica de la ingeniería.

Mecanismos y EstructurasLa mayor parte de las edificaciones,
puentes y armazones de máquinas son estructuras precargadas, debido al uso de juntas soldadas o remachadas en vez de juntas de pasador o articuladas. Para efecto de este curso solo veremos dispositivos con GDL positivo

Definición de Mecanismo
Un mecanismo es una combinación de cuerpos rígidos o resistentes, arreglados de tal manera y enlazados de una forma tal que se mueven uno con respecto a los demás con movimiento relativo definido

Inversión en un MecanismoSe realiza una inversión en un
mecanismo cuando el eslabón originalmente fijo se le permite el movimiento, fijando al mismo tiempo cualquiera de los otros eslabones que originalmente era móvil. Por lo tanto, podemos llevar a cabo tantas inversiones en un mecanismo como eslabones tenga.

Inversión en un MecanismoEs muy importante hacer notar que al
efectuar una inversión en un mecanismo, el movimiento relativo entre los eslabones permanece constante; lo único que varía para cada eslabón es su movimiento absoluto con relación a la tierra

Determinación del GDL Ecuación de Gruebler
GDL = 3L – 2J – 3G
Donde: GDL : número de grados de libertad
L : número de eslabones
J : número de juntas
G : número de eslabones fijados

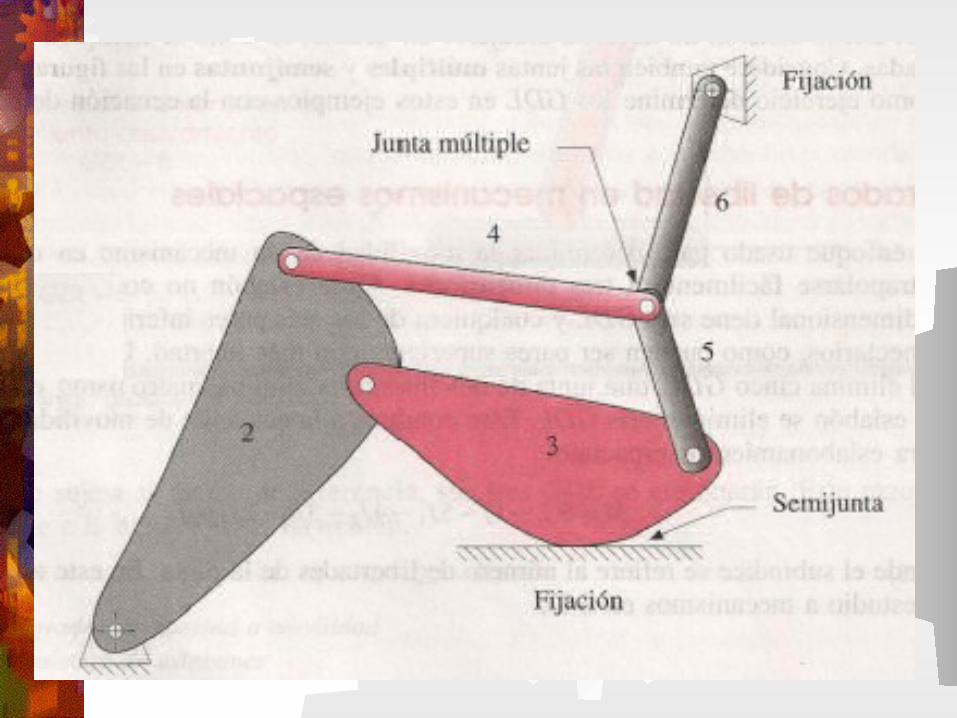
Determinación del GDL Ecuación de Kutzbach
GDL = 3(L – 1) – 2J1 – J2
Donde: L : número de eslabones
J1 : número de juntas completas
J2 : número de semijuntas



Diferentes mecanismos de 4 barras

Diferentes mecanismos de 4 barras

Diferentes mecanismos de 4 barras

Diferentes mecanismos de 4 barras

Tipos de MecanismosMecanismo manivela-biela y corredera. En
este mecanismo hay dos puntos muertos durante el ciclo, uno en cada posición extrema del recorrido del pistón.
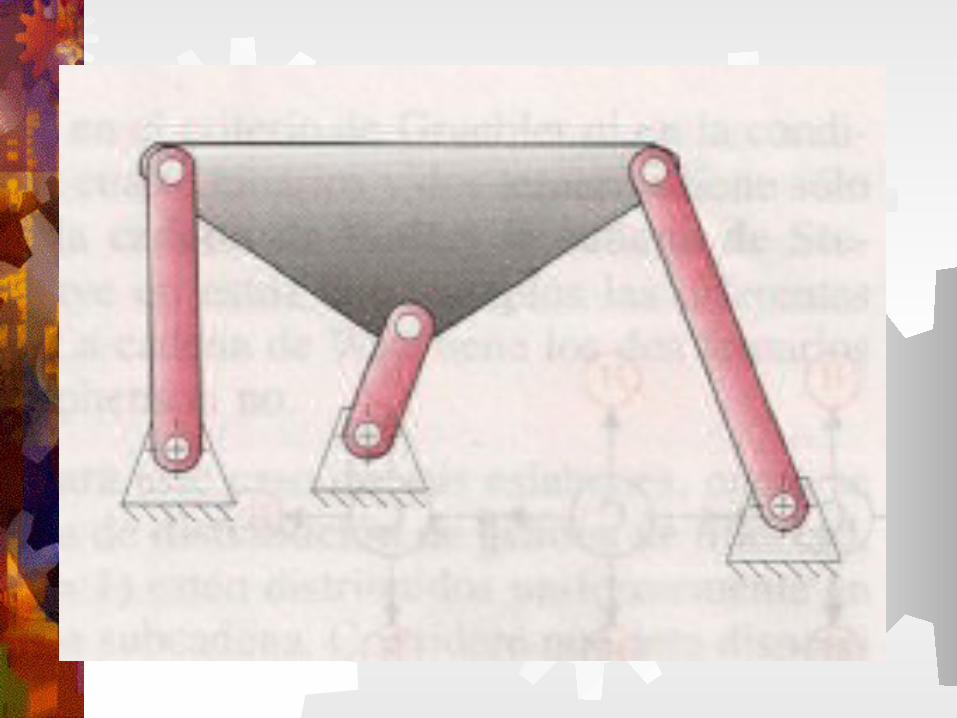
Mecanismos de Retorno Rápido
Se emplea en máquinas y herramientas que tiene una carrera lenta de corte y una carrera rápida de retorno para una velocidad angular constante de la manivela motriz.

Mecanismos de Retorno Rápido

Retorno rápido de eslabón de arrastre
Se obtiene a partir de cuatro barras articuladas. Para una velocidad angular constante del eslabón 2, el 4 gira a velocidad no uniforme. El martinete 6 se mueve con velocidad casi constante en casi toda la carrera ascendente para dar una carrera lenta y una carrera descendente rápida cuando el eslabón 2 gira en sentido de las manecillas del reloj

Retorno rápido de eslabón de arrastre

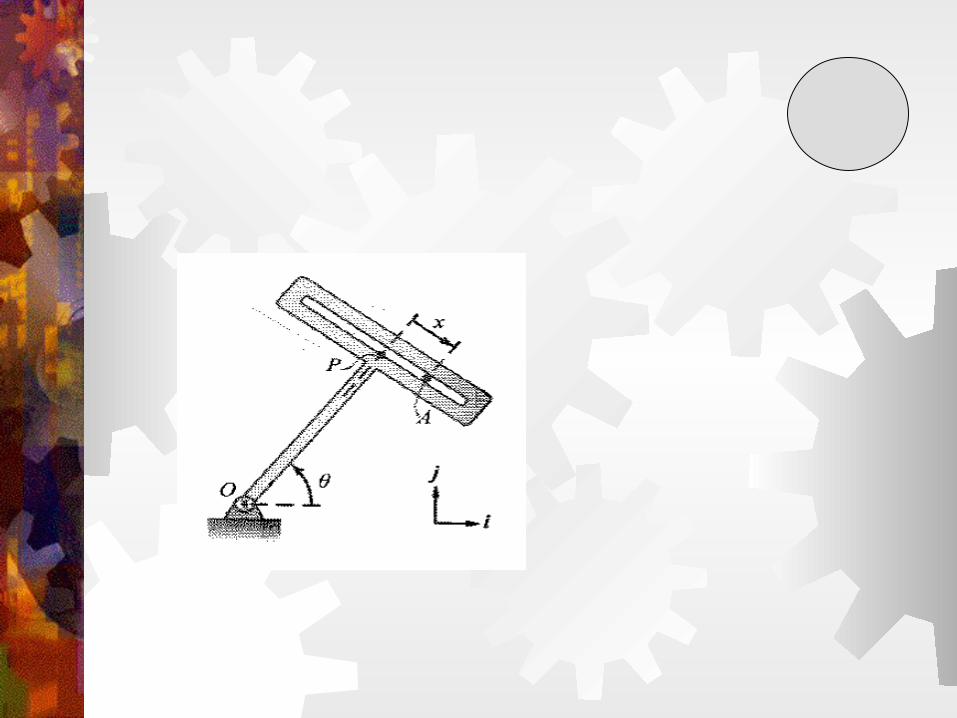
Yugo EscocésProporciona movimiento armónico
simple. Su primer aplicación fue en bombas de vapor, aunque ahora se usa como mecanismo en máquinas para producir vibraciones. El radio r gira a una velocidad angular constante wt y la proyección del punto P sobre el eje de las x (o de las y) se mueve con movimiento armónico simple

Yugo Escocés

Yugo Escocés

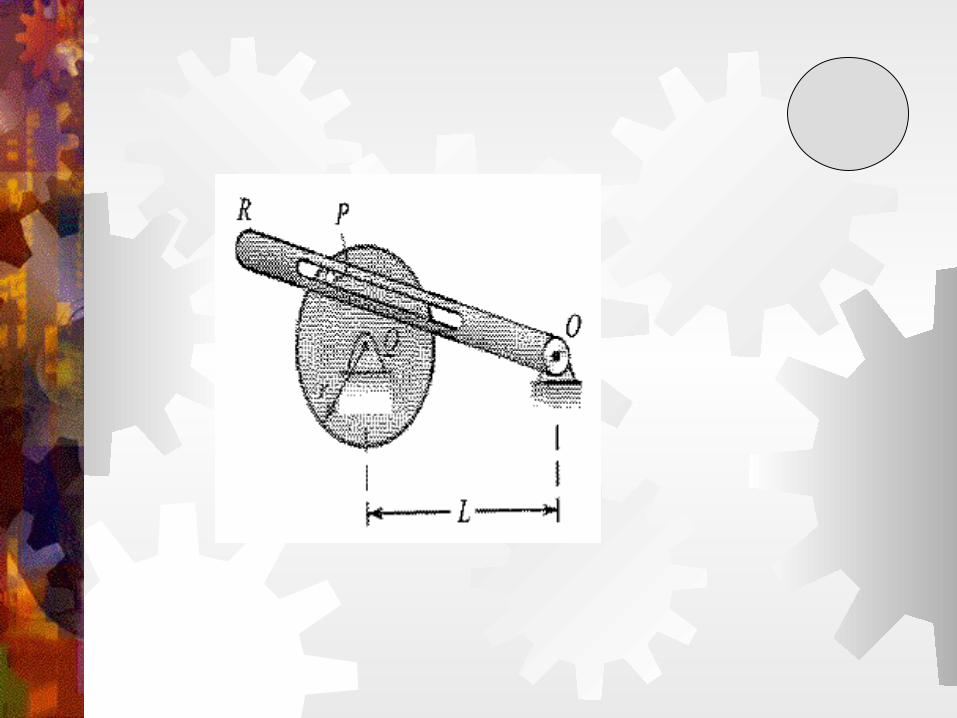
WhitworthEs una variante de la primera inversión de
la biela y manivela. El eslabón 2 como el 4 giran revoluciones completas

Biela – Manivela DescentradoLa cantidad de retorno rápido es muy
pequeña, por lo cual este mecanismo solamente se debe usar en los casos en que el espacio está limitado y el mecanismo deber sencillo

OldhamFacilita la conexión de dos flechas paralelas
ligeramente desalineadas de manera que se pueda trasmitir una relación de velocidad angular constante desde la flecha motriz a la movida

Mecanismo de PalancaTiene muchas aplicaciones en que es
necesario vencer una gran resistencia con una fuerza motriz muy pequeña. Los eslabones 4 y 5 se hacen más colineales, la fuerza F necesaria para vencer una resistencia dada P disminuye de acuerdo a la siguiente expresión:
tan2PF

Mecanismo de Palanca

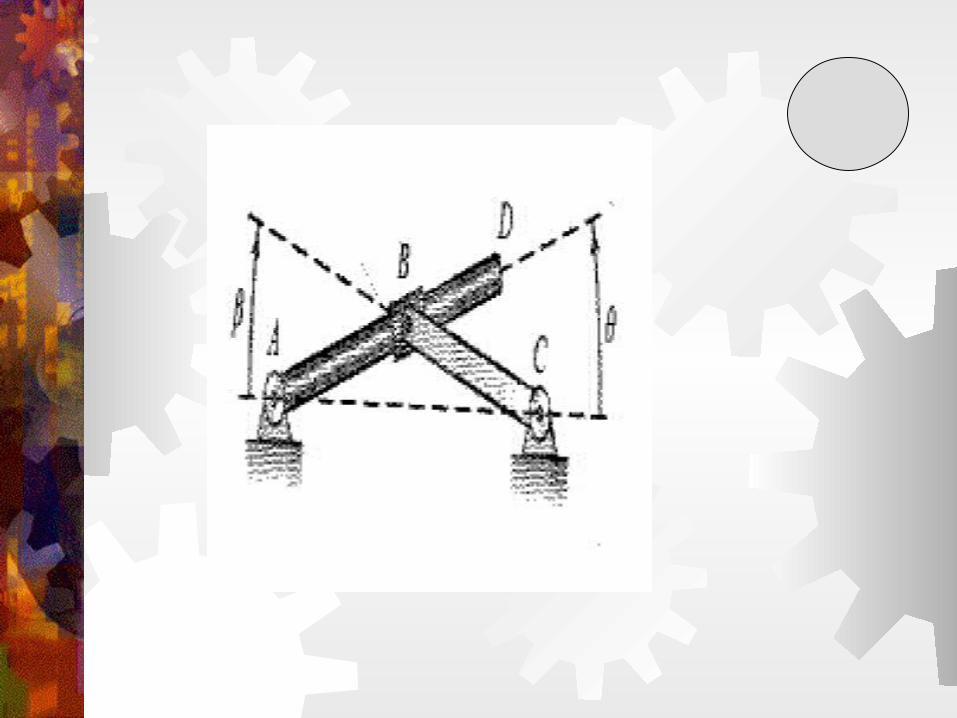
Mecanismos de Línea Recta
Están diseñados de manera que un punto de eslabones se mueven en línea recta.
El punto P está localizado de manera que los segmentos AP y BP sean inversamente proporcionales a las longitudes O2A y O4B. Si los eslabones 2 y 4 son de igual longitud, el punto P forma una trayectoria con forma de 8. Parte de esta trayectoria se aproxima mucho a una línea recta.

Mecanismos de Línea Recta

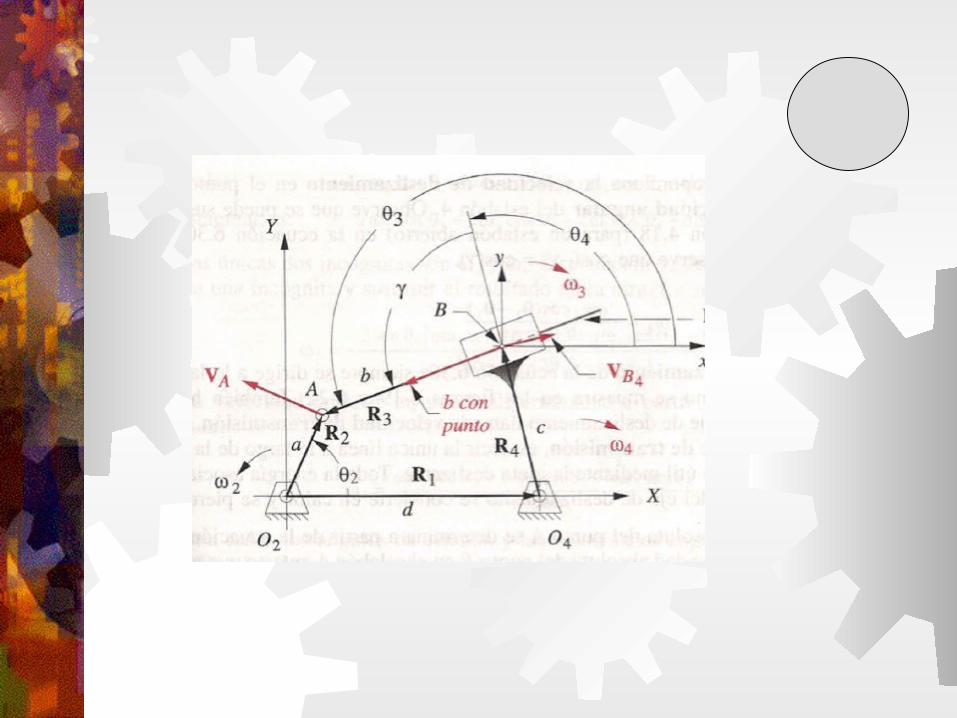
Centros Instantáneos (CI)El centro instantáneo de rotación,
referido al movimiento plano de un cuerpo, se define como el punto del cuerpo o de su prolongación en el que la velocidad instantánea del cuerpo es nula.

Centros Instantáneos (CI)
Si el cuerpo realiza una rotación pura alrededor de un punto, dicho punto es el centro instantáneo de rotación.

Centros Instantáneos (CI)
Si el cuerpo realiza un traslación pura el centro instantáneo de rotación se encuentra en el infinito en dirección normal a la velocidad de traslación.

Centros Instantáneos (CI)Si el cuerpo realiza un movimiento general el centro
instantáneo de rotación se mueve respecto al cuerpo de un instante a otro (de ahí que se llame centro instantáneo de rotación). Su posición se puede conocer en cada instante por intersección de las direcciones perpendiculares a la velocidad de dos de sus puntos.

Centros Instantáneos (CI)Regla de KennedySi 3 objetos están unidos entre sí,
deben existir al menos 3 puntos denominados polos que serán los centros de movimiento de dichos objetos y que además de dichos centros de movimiento estarán siempre alineados.

Centros Instantáneos (CI)Regla de KennedyPara conocer los centros instantáneos
de un mecanismo por este método utilizamos la siguiente formula
CI= n(n-1)/2
Donde:CI: centros instantáneos
n: número de eslabones
Centros Instantáneos (CI)Mecanismo de 4 barras
Dibuje un círculo con todos los eslabones numerados alrededor de la circunferencia
Localice tantos centros instantáneos como sea posible por inspección. Todas las juntas con pasador serán centros instantáneos permanentes.
Identifique una combinación de eslabones para la cual el centro instantáneo no haya sido localizado

Centros Instantáneos (CI)Mecanismo de 4 barras
Identifique 2 triángulos en la gráfica que contengan la línea punteada y cuyos otros 2 lados sean líneas continuas que representen los centros instantáneos y a encontrados
En la gráfica del mecanismo trace una línea por los 2 centros instantáneos ya conocidos que forman un trío con el centro instantáneo desconocido