Método de Mínimos Cuadrados

of 26
-
Upload
rony-j-letona -
Category
Documents
-
view
986 -
download
0
description
Deducción del método de mínimos cuadrados (regresión lineal).
Transcript of Método de Mínimos Cuadrados
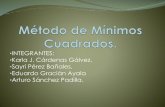
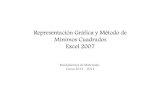
MetododeMnimosCuadradosUniversidaddeSanCarlosdeGuatemalaFacultaddeCienciasQumicasyFarmaciaMatematicaVRonyJoseLetonaQQ200960024JoseRoyMoralesQQ200717695INDICEINDICEIndice1. Distancias 11.1. R(RectaReal) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2. R2(PlanoCartesiano) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.3. R3(EspacioTridimensional). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.4. Transformaci on . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42. Vectores(Repaso) 52.1. MultiplicacionporunaConstante . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.2. Suma. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.3. VectorUnitario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.4. ProductoPunto. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63. Proyecciones 73.1. Proyecci onsobreunaRecta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73.2. Proyecci onsobreunPlano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93.3. MatrizdeProyecci on . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104. MetododeMnimosCuadrados 114.1. CasodeunaRecta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114.2. Generalizacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144.3. ResolucionDiferencial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164.4. ResolucionAlgebraica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184.5. Solucion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 205. CasosEspeciales 225.1. Exponencial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 225.2. Logartmica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 236. Bibliografa 246.1. Literatura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 246.2. Internet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 246.3. Herramientas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2401 DISTANCIAS1. DistanciasParacomenzar ladeducciondel metododemnimos cuadrados, esconvenientequesehagaunbreve repasosobre laformaenlaque se midendistancias. Eso por estoque estaseccionestadedicadaaello.1.1. R(RectaReal)Figura1: Rectareal.Para facilitar la comprensi on, se comienza con la Recta Real(ver Figura1). En ella la medici ondedistanciasesrelativamentesencillaycasiintuitiva:secalculaladiferenciadedistanciashaciael origen. Notesequeenel casodelosn umerosnegativos, ladistanciahayquetomarlaenvalorabsoluto.Espor estoquelaformulageneralm as com un paralamedici onde distanciasenR eslasiguiente:SeanAyBR.LadistanciadentreAyBesentoncesd(A, B) = |B A| (1)Estaformademedirdistanciasenmuypr actica,peronoesla unica. Existenvariasformasdemedirdistancias, perolaqueconciernealestudiodel metododemnimoscuadradoseslaqueseveacontinuacion.Figura2:Distanciaentrepuntos.Considerandoqueel algebraalcalcularconvaloresabsolutosesrelativamentecomplicada, laformautilizadaparamedir distancias enel metododemnimos cuadradoses distinta. Estaenlugardeutilizarvaloresabsolutos,elevalaexpresiondentrodelvalorabsolutoenlaecuacion(1)al cuadrado. De alli su nombre: Metodo de Mnimos Cuadrados. Entonces,la f ormula general es lasiguiente:SeanAyBR.LadistanciadentreAyBesentoncesd(A, B) = (B A)2(2)11.2 R2(PlanoCartesiano) 1 DISTANCIAS1.2. R2(PlanoCartesiano)Figura3:Planocartesiano.Enel casodel planocartesiano, yanosetieneunasinodosrectasrealesunidasmedianteunProductoCartesiano1. La ubicaci on de cadapuntoestadada por pares ordenados. En estecasolaformaqueseutilizaparamedirdistanciaseslaqueyaseconoce.SeanAyBpuntos enR2tal que A=_xaya_yB=_xbyb_. Ladistanciadentre los dosestadadapord(A, B) =_(x)2+ (y)2=_(xb xa)2+ (ybya)2(3)Comosepuedenotar,estotienemuchasimilitudconelteoremadePit agoras.EstoesporqueladistanciaentreunpuntoyelotroenR2es,dehecho,lahipotenusadeuntriangulorect angulo(verFigura4). Enestecasolosdoscatetossonladistanciaentrelalascoordenadasenxyladistanciaentrelalascoordenadaseny.Figura4:Distanciaentrepuntos(Pitgoras).Enel casodel metododemnimos cuadrados, estonoseutilizaradeformaobvia, peroserecomiendatenerenmentelaformadelamedicion.1TambienllamadoProductoCruz. Estesurgi oenlasformulacionesdeDescartessobregeometraanaltica.Elplanocartesianoesunejemplo:(R R).21.3 R3(EspacioTridimensional) 1 DISTANCIAS1.3. R3(EspacioTridimensional)Figura5:Espaciotridimensional.Para complementar el repaso sobre las mediciones de distancia, se analizar a un ultimo caso.R3se construye mediante el triple producto cartesiano de R, es decir (R R R). Son 3 rectas realesquenosllevanaquelaubicaci ondecadapuntoenelespacioestedadaporunatriadaordenada.Laformaparamedirdistanciasenestecasoeslasiguiente:SeanAyBpuntosenR3tal queA=__xayaza__yB=__xbybzb__. Ladistanciadentrelosdosestadadapord(A, B) =_(x)2+ (y)2+ (z)2=_(xb xa)2+ (ybya)2+ (zbza)2(4)AestadistanciaselellamadistanciaEuclidiana.NotesequeestaessemejantealteoremadePit agoras, sin embargo, no es lo mismo. Algo que si se debe de tomar en cuenta es que la distanciaenR2conservalamismaformaqueenR3.Figura6:Distanciaentrepuntos(DistanciaEuclidiana).EstosepuedegeneralizarparatodoslosRnsiseconservalaformaobservadaenR2yenR3.31.4 Transformaci on 1 DISTANCIAS1.4. TransformacionFigura7:Gracasdef(x) = x2yg(x) = |x|enR2.Sisepiensaporunmomentoquedelaformademedirdistanciasvistaalprincipio(Ecuaci on1) y la siguiente (Ecuacion 2) no se obtiene el mismo resultado, se esta en lo cierto. Se puede argu-mentarquealaprimeraformaselefueaplicadaunatransformacion(elevacionalcuadrado)queencualquiermomentopuedeserrevertida(raz cuadrada). Laformade ladistanciatransformadanovara muchodelaforma deladistanciavistaal principio(verFigura7). Espor estoqueestatrasnformacionesv alida. Tambiensehacemuchoenfasisenquelatrasformaci onsehaceconelndefacilitarloscalculosquesellevar anacaboposteriormente.42 VECTORES(REPASO)2. Vectores(Repaso)EnestaseccionseintentaradenirlasoperacionesquesepuedenrealizarentrevectoresenR2. Porsupuesto, todasestassepuedenextender alosvectoresenRn. Solosehar aunrepasodelamultiplicaci onporunescalar,suma, vectorunitarioyproductopunto,yaqueestassonlaspertinentesparalacomprensi ondeestedocumento.2.1. MultiplicacionporunaConstanteLamultiplicaci ondeunvectorporunaconstanteserealizamultiplicandoestaporcadacom-ponentedelvector.Seaaunvectorenelplanoycunaconstantereal.c a = c _axay_=_c axc ay_(5)Geometricamente,laconstantesolo cambiala normadel vector.Aunquesi estaes negativa, ladirecci ondelvectorsevuelvetotalmentelaopuestaasudireccionoriginal.2.2. SumaLasumadevectores sellevaacabosumandocomponenteporcomponentedecadavector.Notese que la suma de vectores da como resultado otro vector. Sean a yb vectores en R2, entoncesa+bsecalculadelaformasiguiente.a +b =_axay_+_bxby_=_ax +bxay +by_=_cxcy_=c (6)Lainterpretaci ongeometricadeestoeselmetodollamadodepuntaconcola. Esteconsisteencolocarunlacoladeunvectorenlapuntadel otrolograndoas queentrelosdosapuntenaunpuntoqueserael resultado. EnlaFigura8sevequealsumarelvectorAconelvectorABelresultadoeselvectorB.Figura8: SumadelosvectoresAyABdandocomoresultadoel vectorB.52.3 VectorUnitario 2 VECTORES(REPASO)2.3. VectorUnitarioEl vector unitario no es m as que un vector cuya norma es igual a 1. Para ello se toma un vectory se lo divide por su norma. Tomese el ejemplo siguiente. Seaa un vector enR2. El vector unitariodea,elcualserepresentapor a,secalculadelaformasiguiente. a =a|a|(7)La representaci on geometrica de esto es un vector con la misma direcci on que a, pero de longitudiguala1.2.4. ProductoPuntoEl producto punto o producto escalar es una operacion entre dos vectores que da como resultadounescalar. Este se lleva acabomultiplicando componente por componente de los vectores yposteriormentesumandotodoslosresultados.SeanpuesaybvectoresenR2.a b =_axay__bxby_= ax bx +ay by(8)Estaoperaciontienerelaci onconlaortogonalidaddelosvectores.Sidosvectoresv1yv2sonortogonales,entonceselproductoescalarentrelosdosesiguala0.Estaoperacionsepuedeescribircomolamultiplicaci ondeunvectorporlatranspuestadelotro si estos se toman como matrices dem1. Una matrizai,jtiene como transpuestaa la matrizaj,i.ParaelcasodedosvectoresaybenR2,elproducto2severadelasiguienteforma.a b =aTb =_axay_bxby_= ax bx +ay by(9)Comosepuedeobservar, el resultadoesel mismo, porloqueambasformasdeescribirestaoperaci onsonequivalentes.2La multiplicacion de matrices se realiza de la forma: Sumatoria de todos los productos de los elementos de cadalaporloselementosdecadacolumna.63 PROYECCIONES3. ProyeccionesEnAlgebraLineal, unaproyecci onnoes m as que larepresentaci onde unelementode unespaciovectorial aunsubespaciodel mismo. Conestose quiere decir que unvector ade unconjuntoW es representado por otro vector de un conjuntoV m as peque no, cuando el conjuntoVestacontenidoenelconjuntoW.Figura9:Proyecciondeunvectordeunespacioaunsubespacio.Los casos m as comunes que se utilizan para ejemplicar esto, es el de un vector sobre una rectayel deunvectorsobreunplano. Lageneralizaci ondeamboscasosterminasiendounamatrizquerealizalaproyecci ondeunespecioaotro. Lamatrizesparticularparacadaproyecci on, sinembargo, el concepto es el mismo en todos los casos. A esta matriz se le llama matriz de proyeccion.3.1. ProyeccionsobreunaRectaParailustrarestetema, seutilizasiemprelaproyecci ondeunvectorenR2sobreunarectatambien en R2. En este caso se realizara la deduccion completa, sin embargo no se tratar a a ning unejemploenparticular.Figura10:Proyecciondeunvectorbsobreunarectag.SeaentoncesbunvectorenR2yg: X= 0 + t a,dondeaeselvectorsobreelqueseproyec-tar ab. Notesequeentreaybsecomprendeunangulo.Laproyecci ondebsobreasedenotacomoel vectorp. Lanotacionparaunaproyecci ondeestetipoeslasiguiente: proyabyseleecomolaproyecci ondebsobrea.Considereseentoncesquelanormadelvectorpesigualalanormadebporelcosenode.|p| = |b| cos () (10)73.1 Proyecci onsobreunaRecta 3 PROYECCIONESYadem as,queelcosenodesedenedelasiguienteforma.cos () =a b|a| |b|(11)Ahora,si sesustituyelaecuacion(10)conlaecuacion(11),seobtienelanormadel vectorpexpresadaenterminossolodeayb.|p| = |b| a b|a| |b|=a b|a|(12)Ahora, paraobtenerel vectorp, sedebededardireccionasunorma. Notesequeaypsoncolineales, por loqueel vector unitarioparaambos casos es el mismo. Entonces, tomandolasecuaciones(7)y(12),secalculalaproyecci ondebsobrea:elvectorp.proyab = p = |p| a =a b|a|a|a|=a b|a| |a| a (13)Yasetieneentonceslaproyecci onpdebsobrea.Siabselerestap,seobtendr aunvectorortogonal a cualquier vector elementode la rectag. Entonces puede decir que (b proyab) v = 0paratodov g.83.2 Proyecci onsobreunPlano 3 PROYECCIONES3.2. ProyeccionsobreunPlanoEnlaseccionanteriorsehizoladeducciondelaproyecci ondeunvectorenR2aunarecta,lacual sepuedeconsiderarcomounespaciounidimensional R. Enel casodeunaproyecci onsobreunplano,setomaraunvectordeR3yseproyectar asobreunplano, el cual sepuedeconsiderarcomounespaciobidimensional R2.Figura11:ProyecciondeunvectorvsobreunplanoS.Paraestecaso,noseconoceun vectorsobreelquesepuedaproyectarelvectorv. Espor estoque en este caso la proyecci on se realizara utilizando varias poryecciones y luego suma de vectores.Primero, se debe partir de la base ortogonal del plano. En este caso basta decir que se necesitandosvectoresv1, v2Stal quev1 v2=0. El vectorvseproyectaentoncessobrecadaunodeellosyluegoelresultadodeestosesumaparaobtenerlaproyecci ondevsobreSproySv.proySv = proyv1v + proyv2v =v1 v|v1| |v1| v1 +v2 v|v2| |v2| v2(14)Figura12:Proyecciondeunvectorvsobrevectoresortogonalesparallegaralaproyeccionsobreel plano.Al igual queenel casodeunarecta, el vectorproyecci onpudosercalculado. Enel casodeunplano, tambiensecumplequesi avselerestaproySv, el vectorresultanteseraortogonal acualquiervectorqueseaelementodelplanoS, (v proySv) vi= 0vi S.93.3 MatrizdeProyecci on 3 PROYECCIONES3.3. MatrizdeProyeccionComo se puede observar en las dos seccionesanteriores, las proyeccionesno son m as que trans-formaciones. Porlotanto, estaspuedenserrepresentadastambienporunamatriz: lamatrizdeproyeccion. EnestecasosetieneunamatrizAalaqueselepuedemultiplicarcualquiervectorvparaobtenersuproyecci onsobreunespacioW.proyWv = Av (15)En un caso general, se dice que el espacioWal que se estaproyectandoes el espacio generadopor las columnas de la matriz, puesto que el vector proyecci on solo puede pertenecer a ese espacio.Paraejemplicaresto, considereseunamatriz demn y un vectorv Rn. La proyecci onestaradadaentoncespor:proyWv =__a1,1a1,2a1,3. . . a1,ma2,1a2,2a2,3. . . a2,ma3,1a3,2a3,3. . . a3,m...............an,1an,2an,3. . . an,m____v1v2v3...vn__(16)Alexpandirestoseobtiene:proyWv = v1__a1,1a2,1a3,1...am,1__+ v1__a1,2a2,2a3,2...am,2__+ v3__a1,3a2,3a3,3...am,3__+ . . . + vn__a1,na2,na3,n...am,n__(17)Aqui se puede ver que siv es cualquier vector en Rn, entonces al espacio que se esta proyectan-doesel generadoporlacombinacionlineal delascolumnasdeA. AestesubespacioselellamaespaciocolumnadeA.Lamatriz de proyecci ones especca paracada proyecci onyparael caso del Metodo deMnimos Cuadrados se har aladeduccionposteriormente. Sinembargo, enuncasogeneral, lamatrizdeproyecci onpuedeserconstruidadelasiguienteforma:proyWv =UUTv (18)DondeUeslamatrizcuyascolumnassonlasbasesortonormales3delespacioW.3BasesOrtonormales: Vectoresortogonales denormaiguala1quegeneran aunespaciovectorial.104 METODODEMINIMOSCUADRADOS4. MetododeMnimosCuadradosFigura13:Regresi onlineal ycuadr atica.Elmetododemnimoscuadradosesunmetododeextrapolacionparaencontrarlacurvaquemejor se ajuste a una coleccion de puntos. Se le conoce tambien bajo el nombre de Regresion. Conel tiemposelehandadootrosnombrescomoLineal oCuadraticadependiendodelacurvaquesedeseaaproximar. Paraestecasoenparticular, secomenzaraconlaregresi onlineal. Luegosegeneralizar aparacualquiercurvaquesedesee.4.1. CasodeunaRectaSe comenzaraasumiendo que se tiene unacantidadnde puntos enel plano. Cadapuntotendr a una coordenada xi y una coordenada yi. Se quiere aproximar la tendencia de estos medianteunarectadelaforma:g(x) = a + bx (19)Seintentarahacerquetodoslospuntospasenporlarecta, porloquesetendr anecuacionesdeunarectaexpersadasdelasiguienteforma:a + bx1= y1a + bx2= y2a + bx3= y3...a + bxn= yn(20)Donde yiesunaaproximaciondelacoordenadaenydecadapunto. Estosepuedereescribirdeformamatricialdelasiguientemanera:__a bx1a bx2a bx3......a bxn__=__ y1 y2 y3... yn__(21)114.1 CasodeunaRecta 4 METODODEMINIMOSCUADRADOSQue,reescribiendolo,eslomismoque:__1 x11 x21 x3......1 xn___ab_=__ y1 y2 y3... yn__ Ax = v (22)LamatrizquecontienealosxiselahaidenticadocomoA,alvectordeincognitas(ayb)comoxyalvectorquecontienealas yicomov. Peroparatodoxihabraun yidiferentedeyiyaquelarectanopasararealmenteportodoslospuntos. Entoncessecuentaconciertoerrorparacadapunto(verFigura14).Figura14:Distanciasdelasquesecomponeel error.Elerrorsemediraenformadedistanciasentreyiy yi.Notesequeenestecasoseutilizaralaformavistaconanterioridad.Elerrorparacadaxiestar adadopor:e2i= (yi yi)2= (yi(a + bxi))2(23)Yentonces,elerrortotal2entodoelmetodosepuedeexpresardelasiguienteforma:2=n
i=1_e2i=n
i=1[yi yi]2=n
i=1[yi(a + bxi)]2(24)Larazonporlacual el errortotal yel erroreiseescribenelevadosal cuadradosever aacontinuacion.Ahora,sisereescribeelerror deformavectorial,seobtieneunvectoredelaformasiguiente:e = |v Ax| =__e1e2e3...en__=__y1(a + bx1)y2(a + bx2)y3(a + bx3)...yn(a + bxn)__(25)124.1 CasodeunaRecta 4 METODODEMINIMOSCUADRADOSSisecalculalanormadelvectordeerrorenlaecuacion(25),seobtienelosiguiente:|e| =__e1e2e3...en__=_e21 + e22 + e23 + . . . + e2n=_n
i=1[e2i] = (26)Notesequelanorma|e|esiguala.Esporestoqueambosseescribenelevadosalcuadrado.Ahora, lasecuaciones(24)y(26)sonpr acticamentelomismo. Sololaecuacion(22)seralaexcepcion, ya que de esta (igual que de las anteriores 2), se puede encontrar la solucion al problema.Por esto, laresolucion de estasse llevar a acabo de dos formas:DiferecialyAlgebraica. Ambasseranpresentadasenlassecciones4.3y4.4conelndellegaralasolucion(secci on4.5).134.2 Generalizacion 4 METODODEMINIMOSCUADRADOS4.2. GeneralizacionEnestaseccionseintentarageneralizarelconceptoquesevioenlaseccionanterior.ParaelloseconsideraraquelacurvaquedescribelatendenciadelacolecciondepuntosesunpolinomioPdegradom.Entonceslaecuacionseralasiguiente:P(x) = 1 + 2x + 3x2+ . . . + m+1xm= y (27)Entonceslasnecuacionesparalospuntosdadossever andelasiguienteforma:1 + 2x1 + 3x21 + . . . + m+1xm1= y11 + 2x2 + 3x22 + . . . + m+1xm2= y2...1 + 2xn + 3x2n + . . . + m+1xmn= yn(28)Locual,deformamatricial,sepuederepresentaras:__1 x1x21. . . xm11 x2x22. . . xm2...............1 xnx2n. . . xmn____123...m+1__=__ y1 y2... yn__ Ax = v (29)Notesequelaecuacion(22)yecuacion(29)terminandelamismaforma. Porloqueel proced-imientoapartirdeestasseraelmismo.Ahora, seproceder aaverel errorgeneralizadoapolinomios. Paraellolaecuacionprincipalseradelaforma:e2= (yi yi)2=_yi_1 + 2xi + 3x2i+ . . . + m+1xmi__2(30)Entonceselerror,aligualqueenlaseccionanterior,sepuedeexpresarenformavectorialas:e =__e1e2...en__=__ y1(1 + 2x1 + 3x21 + . . . + m+1xm1) y2(1 + 2x2 + 3x22 + . . . + m+1xm2)... yn(1 + 2xn + 3x2n + . . . + m+1xmn )__(31)Considerandolaecuacion(26),entonceselerrortotal2sepuedeexpresardelasiguienteforma:2= |e|2=n
i=1[ei]2=n
i=1[yi yi]2=n
i=1_yi_1 + 2xi + 3x2i+ . . . + m+1xmi_2(32)Lasecuaciones(29)y(32)sonequivalentesalasecuaciones(22)y(24)delaseccionanterior,porloquelaresoluciondeelsistemayageneralizadoparacualquierpolinomio,sepuedellevara144.2 Generalizacion 4 METODODEMINIMOSCUADRADOScabo de la misma manera que con una recta. Es por ello que la resolucion que se ver a a continuacionseraparaunarecta. Cualquieraspectoquecambieentreestecasoyel generalizadoseindicar aenlassiguientesseccionestambien.154.3 ResolucionDiferencial 4 METODODEMINIMOSCUADRADOS4.3. ResolucionDiferencialEl problemade mnimoscuadradosintentaencontrar unacurvaqueseala quemejor seajustea una colecci on de puntos. Siendo este el caso, se intenta minimizar4el error entre la curva y todoslospuntos.Enestaseccionseintentarabuscarestemnimopormediodelc alculodiferencial.Paraelloseoptimizar a la funcion de error2, lo cual implica derivarla con respecto a cada una de las variablesayboenelcasodeunpolinomiomayor,conrespectoatodoslosjdondej 1 =m,elgradodelpolinimo.Seprocedeentoncesaderivarlafunciondeerror2(Ecuacion(24)): (2)a=a_n
i=1[yi(a + bxi)]2_=n
i=1_a (yi(a + bxi))2_(33) (2)b=b_n
i=1[yi(a + bxi)]2_=n
i=1_b (yi(a + bxi))2_(34)Notesequedelasumatoriaseobtendrasolocoecientesdeaobsinpotenciaoelevadosalcuadrado5.Elcambioentrelasumatoriayladerivadaparcial(Ecuaciones(33)y(34))esposiblederealizargraciasalaspropiedadesdeladerivada6.Se contin ua entoncescon las derivadas y se igualan estas a 0 con el n de encontrar el m aximoomnimo. (2)a= 2n
i=1[yi(a + bxi)] = 0 (35) (2)b= 2n
i=1[yi(a + bxi)] xi= 0 (36)Se distribuyelasumatoria y se reordenan los terminosde tal forma en que la ecuacionparezcaladeunarecta.na + bn
i=1[xi] =n
i=1[yi] (37)an
i=1[xi] + bn
i=1_x2i=n
i=1[xiyi] (38)4Deaquivienelaotrapartedelnombredelmetodo:MnimosCuadrados.5Sepuedepensarenpar abolasdelasquesebuscaelmaximoomnimo.6Enestecasorecurdeselapropiedad quedictaqueladerivadadeunasumaeslasumadelasderivadas.164.3 ResolucionDiferencial 4 METODODEMINIMOSCUADRADOSEstosepuedereescribirdeformamatricialnuevamente:_na b
ni=1 [xi]a
ni=1 [xi] b
ni=1 [x2i]_=_ ni=1 [yi]
ni=1 [xiyi]_(39)Quenalmenteseconvierteen:_n
ni=1 [xi]
ni=1 [xi]
ni=1 [x2i]_ _ab_=_ ni=1 [yi]
ni=1 [xiyi]_ Bx =z (40)Enestepunto, yasehallegadoaunaformaenlaqueel errorhasidominimizadoyambasecuaciones solonecesitanser resueltas. Sinembargoel ultimopaso, lasolucionapartir de laecuacion(40),sedejaraparalaseccion4.5.174.4 ResolucionAlgebraica 4 METODODEMINIMOSCUADRADOS4.4. ResolucionAlgebraicaPara la solucion de forma algebraica se parte de la ecuacion (25). Esta expresael error de cadapuntoconrespectoal polinomiosolucion. Sup ongaseentoncesque wesel vectorsoluciondeladistanciamnimaquesebuscaywescualquiervectorenR2siseconsideraelcasodeunarecta.Elerrordelarectasolucionesmenoraldecualquierotrarecta.|v A w| |v Aw| (41)Se consideraraentoncesaA w comounaproyecci ondev sobreel espaciocolumnadeA, seg unlovistoenlaseccion3.3.NotesequetantovcomoA wpertenecenalmismoespaciovectorial.proycol(A)v = A w (42)Elerrordelarectasolucionsepuedereescribirentoncescomo: = v proycol(A)v (43)Seg unloquesemostroenlassecciones3.1y3.2,sesabequeelerroresunvectorortogonalacualquier vector elementodel espaciocolumnadeA. Siendoestoas, sepuedeaprovechar laortogonalidadparaencontraral vectorsolucion w. Sear=AwdondewescualquiervectorenR2.r _v proycol(A)v_= 0Aw (v A w) = 0(44)Elproductoanteriorsepuedereescribirseg unsevioenlaseccion2.4como:(Aw)T(v A w) = 0 (45)wTAT(v A w) = 0 (46)w AT(v A w) = 0 (47)Parapasarde(45)a(46)seutiliz opropiedadesdelatranspuesta. Notesequeenlaecuacion(47), AT(v A w)esotrtogonalatodovectorw. El unicovectorortogonalatodovectorenR2eselvector0.SeprocedeentoncesaresolverelsistemaAT(v A w) = 0.AT(v A w) = 0 (48)ATv ATA w = 0 (49)ATAx = ATv (50)Estoeslomismoque:__1 x11 x21 x3......1 xn__T __1 x11 x21 x3......1 xn___ab_=__1 x11 x21 x3......1 xn__T __y1y2y3...yn__(51)184.4 ResolucionAlgebraica 4 METODODEMINIMOSCUADRADOSAlcalcularlatranspuesta,seobtienelosiguiente:_1 1 1 . . . 1x1x2x3. . . xn___1 x11 x21 x3......1 xn___ab_=_1 1 1 . . . 1x1x2x3. . . xn___y1y2y3...yn__(52)Elresultadodelamultiplicaci ondematricesdelladoizquierdodacomoresultadounamatrizde22, mientras que la del lado derecho da como resultado una matriz de 21. Se procede entoncesahacerlamultiplicaci ondelasmatricesyelresultadoeselsiguiente:_n
ni=1 [xi]
ni=1 [xi]
ni=1 [x2i]_ _ab_=_ ni=1 [yi]
ni=1 [xiyi]_ Bx =z (53)Notesequelaecuacion(53)esexactamenteigualalaecuacion(40).Elprocedimientoalgebr aicoesm ascomodo,sinembargo,cuandosetrabajaconpolinomiosdegrado> 1.194.5 Solucion 4 METODODEMINIMOSCUADRADOS4.5. Soluci onAhora, para concluir con la deduccion, se tomara las ecuaciones (40) y (53) y se resolver a estas.Para ello se utiliza a la matriz inversa. De esta forma se remover ala matriz de sumatorias del ladoizquierdo,dejandoasalvectordecoecientes_ab_despejado.Primerosecalcularalamatrizinversade(40).Existen2metodosparahaceresto:Pordeter-minantes y por el metodo de Gauss-Jordan. La operatoria utilizada en el sengundo metodo es m aslargaencomparacionalmetodopordeterminantes, porloqueseproceder aacalcularlainversapordeternimantes.Eldeterminantedelamatriz,secalculaentonces:det |B| = detn
ni=1 [xi]
ni=1 [xi]
ni=1 [x2i]= nn
i=1_x2i_n
i=1[xi]_2(54)Yaconeldeterminante,lamatrizinversasepuedeexpresardelasiguienteforma:B1=_n
ni=1 [xi]
ni=1 [xi]
ni=1 [x2i]_1=1det |B|_ ni=1 [x2i]
ni=1 [xi]
ni=1 [xi] n_(55)Ahora,aplicandolainversaaambosladosdelaecuacionseobtiene:B1Bx = B1zx = B1z(56)_ab_=__
ni=1[x2i]n
ni=1[x2i](
ni=1[xi])2
ni=1[xi]n
ni=1[x2i](
ni=1[xi])2
ni=1[xi]n
ni=1[x2i](
ni=1[xi])2nn
ni=1[x2i](
ni=1[xi])2___ ni=1 [yi]
ni=1[xiyi]_(57)Ydeesto,alterminardemultiplicarseobtienedosecuacionesindependientes:a =
ni=1 [xi]2
ni=1 [yi]
ni=1 [xi]
ni=1 [xiyi]n
ni=1 [x2i] (
ni=1 [xi])2(58)b =n
ni=1 [xiyi]
ni=1 [xi]
ni=1 [yi]n
ni=1 [x2i] (
ni=1 [xi])2(59)204.5 Solucion 4 METODODEMINIMOSCUADRADOSAhora, si se considera que la mediade una serie de datos w1, w2, . . . , wi se calcula de la siguienteforma: w =
ni=1 [wi]n(60)Entonces las ecuaciones (58) y (59), despues de un poco de manipulaci on algebr aica, se puedenreescribirdelasiguienteforma:a = y
ni=1 [xi]2 x
ni=1 [xiyi]
ni=1 [x2i] n x2(61)b =
ni=1 [xiyi] n x y
ni=1 [x2i] n x2(62)Y con estas dos ultimas ecuaciones se concluye la deduccion del metodo de mnimos cuadrados.Los escalares a y b se introducen en la ecuacion (19) y con ello se logra la recta que mejor aproximalatendenciadelacolecciondepuntosquesetenaalprincipio.Para el caso generalizado la solucion se deduce de la misma forma, solo que la ecuacion con quesecomienza(esdecir,laecuacionmatricialobtenidadelassecciones4.3y4.4)seram asgrande.De hecho, si la curvaque se deseaaproximar es un polinomio de gradom, entoncesla matriz serade(m + 1) (m + 1).215 CASOSESPECIALES5. CasosEspecialesTomando en cuentaque no todas las curvas que se deseenaproximar son polinomios, se dedicauna seccion al caso de las curvas exponencial y logartmica. Despues de esto se espera haber dejadoclaroqueacualquiercolecciondepuntosselepuedeaproximadarcualquiercurvasi seaplicalatransformacioncorrecta.5.1. ExponencialFigura15:Regresi onexponencial.Parael casodeunacolecciondepuntos que secomportandeformaexponencial, lamejoraproximacionseraunacurvadelaforma:f(x) = y= cedx(63)En este caso, la deduccionhechapreviamenteaplicara si estaecuacion sepudieratransformarenalg untipodepolinomio.Siaestaecuacionseleaplicalogartmonatural,notesequesepuedellevaraunpolinomiodegrado1.ln(y) = ln_cedx_(64)= ln(c) + ln_edx_(65)= ln(c) + dx (66)Ahora, si todoslospuntosln(y)seutilizancomounY , yln(c)setomacomounaconstanteC,entonceslaecuacion(66)setransformaaunpolinomiogrado1delaforma:Y= C + dx (67)Estayasepuede resolver conlamismadeduccionplanteadapreviamente. Unavez calculadosc = eCydyasepuedenintroducirestosalaecuacion(63)yconestoobtenerlacurvadeseada.225.2 Logartmica 5 CASOSESPECIALES5.2. LogartmicaFigura16:Regresi onlogartmica.Parael casodeuncomportamientologartmico, laecuaciongeneral queseajustaraseradelaforma:f(x) = y= b logk(cx) (68)Este casoesun poco diferenteal anterior. En estecasono seaplicar a ningunatransformacion,sinoquesereordenar aalgunosterminosdelaformasiguiente:y= b logk(c) + b logk(x) (69)Notesepues, quelaecuacionallyatienelaformadeunpolinomiodegrado1.Paraqueestosevuelva m as claro, considerese (b logk(c)) como una sola constanteCy a logk(x) como X. Entonceslaecuacionseveraas:y= C + bX (70)Se resuelve entonces el problemacomosi este fueraunarectaypor ultimose sustituyenlasconstantes cybenlaecuacion(68). Notesequeparaobtener csedebederealizarlasiguienteoperaci on:c = kCb(71)236 BIBLIOGRAFIA6. Bibliografa6.1. LiteraturaAndersonet.al.1999.EstadsticaparaAdministracionyEconoma.7ed.ThomsonGrossmanS.1984.ElementaryLinearAlgebra.2ed.WadsworthPooleD.2004.AlgebraLineal:UnaIntroduccionModerna.Thomson6.2. InternetWeissteinE.2009.LeastSquaresFitting.WolframMathWorld.http://mathworld.wolfram.com/LeastSquaresFitting.htmlWeissteinE.2009.LeastSquaresFitting-Exponential.WolframMathWorld.http://mathworld.wolfram.com/LeastSquaresFittingExponential.htmlWeissteinE.2009.LeastSquaresFitting-Logarithmic.WolframMathWorld.http://mathworld.wolfram.com/LeastSquaresFittingLogarithmic.htmlWileyPublishingInc.2009. LinearAlgebra:ProjectionontoaSubspace. ClisNotes.http://www.clisnotes.com/WileyCDA/ClisReviewTopic/Projection-onto-a-Subspace.topicArticleId-20807,articleId-20792.html6.3. HerramientasGIMP:GNUImageManipulationProgram.Version2.6.3.2008.http://www.gimp.org/OpenOce.org:TheFreeandOpenProductivitySuite.Version3.0.1.2008.http://www.openoce.org/SAGE:OpenSourceMathematicsSoftware.Version3.1.4.2008.http://www.sagemath.org/TexMaker:FreeLATEXEditor.Version1.7.2008.http://www.xm1math.net/texmaker/24