MÉTODOS DE SINTONÍA Y AUTOSINTONÍA DE PIDs FRACCIONARIOS · 2 MÉTODOS DE SINTONÍA Y...
33
Jornadas de Ingeniería de Control Pamplona, 14 y 15 de Marzo de 2006 MÉTODOS DE SINTONÍA Y AUTOSINTONÍA DE PIDs FRACCIONARIOS Blas M. Vinagre, Concepción A. Monje *Escuela de Ingenierías Industriales. Universidad de Extremadura (Badajoz), Spain. e-mail: [email protected] ; [email protected]
Transcript of MÉTODOS DE SINTONÍA Y AUTOSINTONÍA DE PIDs FRACCIONARIOS · 2 MÉTODOS DE SINTONÍA Y...

1
Jornadas de Ingeniería de Control
Pamplona, 14 y 15 de Marzo de 2006
MÉTODOS DE SINTONÍA Y AUTOSINTONÍA DE PIDs FRACCIONARIOS
Blas M. Vinagre, Concepción A. Monje
*Escuela de Ingenierías Industriales. Universidad de Extremadura (Badajoz), Spain.
e-mail: [email protected]; [email protected]

2
MÉTODOS DE SINTONÍA Y AUTOSINTONÍA DE PIDs
FRACCIONARIOS
ÍNDICE
Cálculo FraccionarioControl FraccionarioSintonía de controladores PID fraccionariosAutosintoníaConclusiones

3
CÁLCULO FRACCIONARIO
• Definiciones (Riemann – Liouville):
4
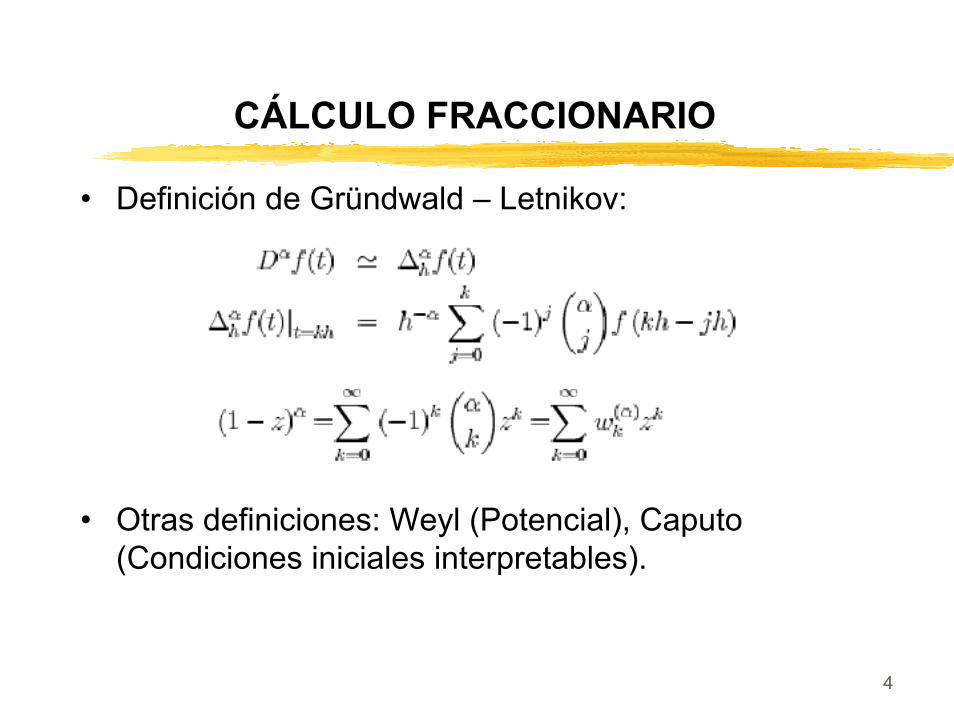
CÁLCULO FRACCIONARIO
• Definición de Gründwald – Letnikov:
• Otras definiciones: Weyl (Potencial), Caputo(Condiciones iniciales interpretables).
5
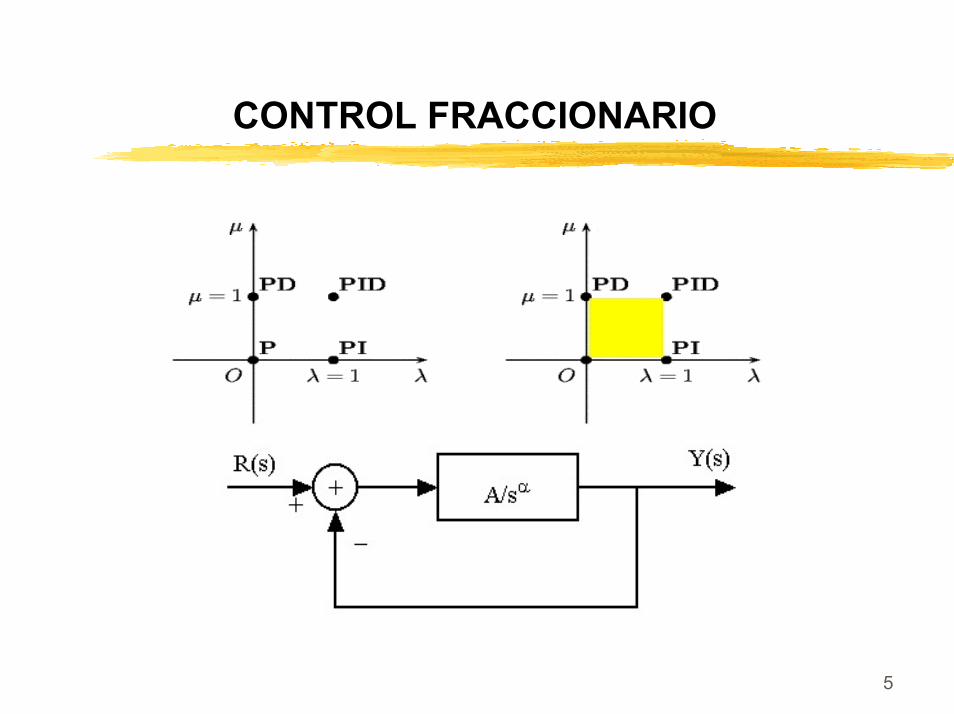
CONTROL FRACCIONARIO
6
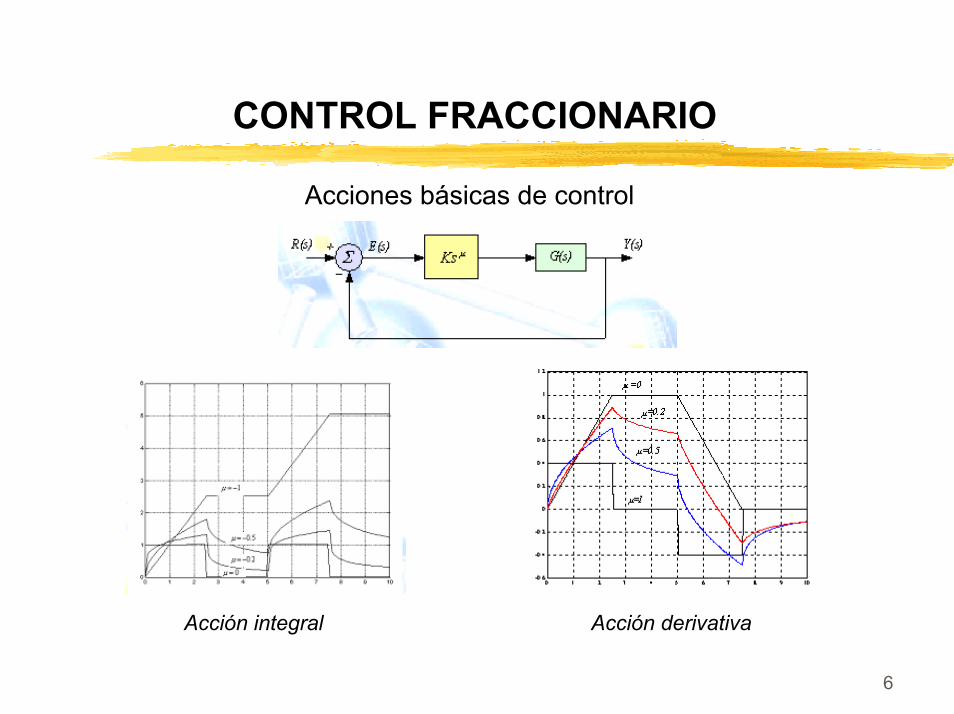
CONTROL FRACCIONARIO
Acciones básicas de control
Acción integral Acción derivativa
7
CONTROLADORES PID FRACCIONARIOS
• Dos estructuas:• Sintonía: Encontrar los valores de los parámetros para satisfacer
5 especificaciones de diseño.
• Autosintonía: Compensación atraso-adelanto.
µλ sk
skksC d
ip ++=)(
8
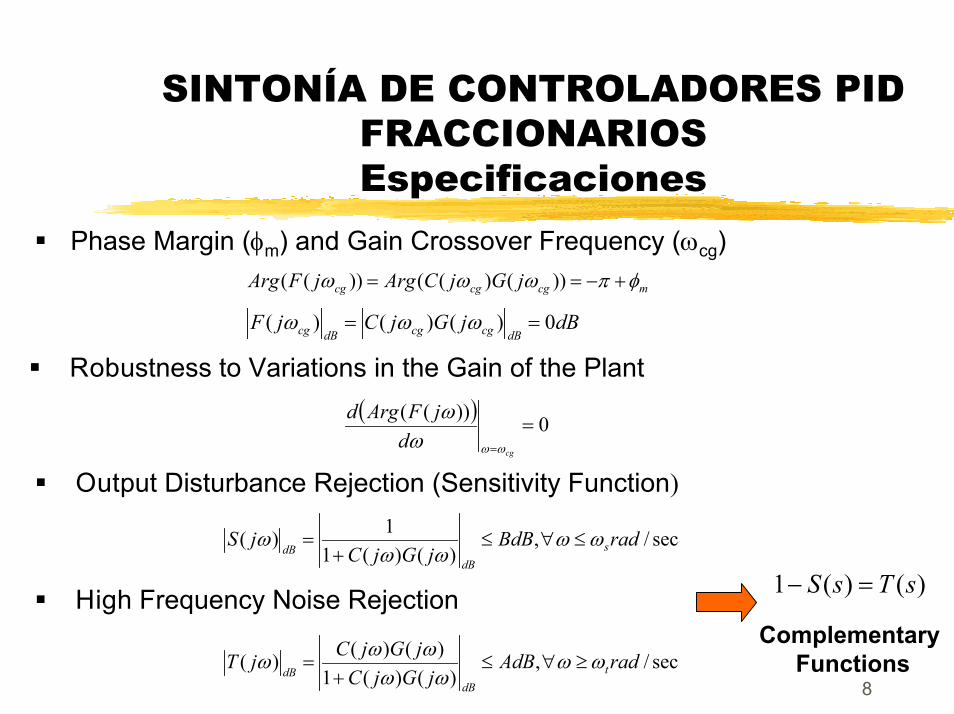
SINTONÍA DE CONTROLADORES PID FRACCIONARIOSEspecificaciones
Phase Margin (φm) and Gain Crossover Frequency (ωcg)mcgcgcg jGjCArgjFArg φπωωω +−== ))()(())((
dBjGjCjFdBcgcgdBcg 0)()()( == ωωω
Robustness to Variations in the Gain of the Plant( ) 0))((
== cg
djFArgd
ωωωω
Output Disturbance Rejection (Sensitivity Function)
sec/,)()(1
1)( radBdBjGjC
jS sdB
dBωω
ωωω ≤∀≤
+=
)()(1 sTsS =−High Frequency Noise RejectionComplementary
Functionssec/,)()(1
)()()( radAdBjGjC
jGjCjT tdB
dBωω
ωωωωω ≥∀≤
+=

9
SINTONÍA DE CONTROLADORES PID FRACCIONARIOS
Diseño
Set of Five Nonlinear Equations with Five Unknown Parameters(kp,kd,ki,λ,µ)
NonlinearNonlinear MinimizationMinimization ProblemProblem
Main Function to Minimize0)( =dBcgjF ω
0))(( =−+ mcgjFArg φπω
( ) 0))((=
= cgd
jFArgd
ωωωω
0)( =−dBt AjT ω
0)( =−dBs BjS ω
FMINCON(Matlab)Constraints

10
SINTONÍA DE CONTROLADORES PID FRACCIONARIOS
Ejemplo: Simulación
Design Specifications:First-Order Plant Plus Integrator:
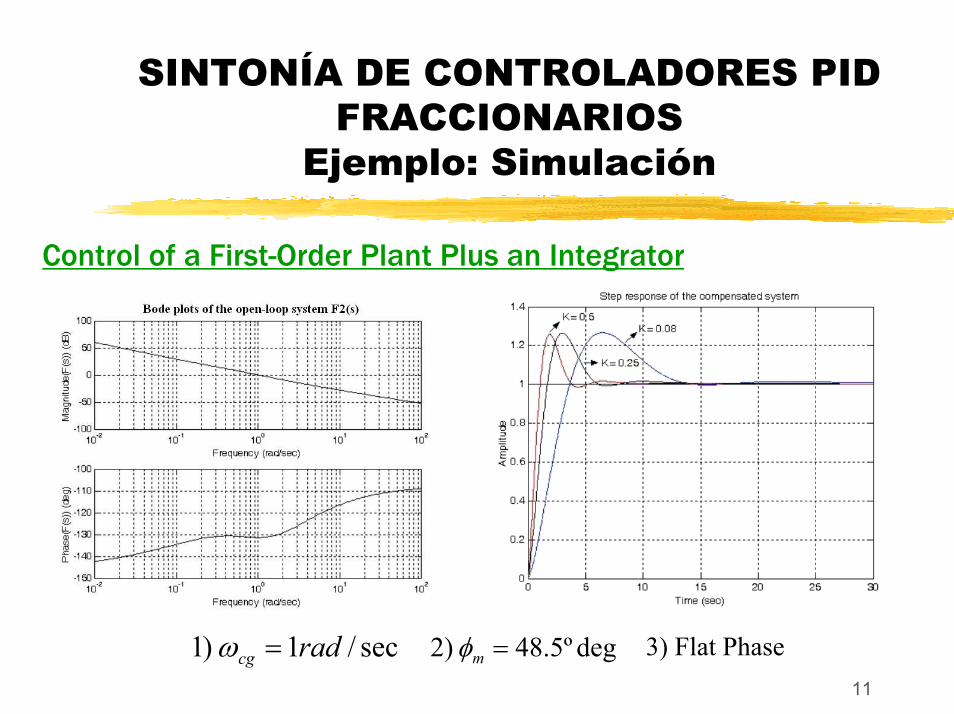
degº5.48)2 =mφsec/1)1 radcg =ω
)1(25.0
)1()(
+=
+=
ssssksG
τ3) Flat Phase
sec/10,20)()4 raddBjT tdB=≥∀−≤ ωωω
sec/01.0,20)()5 raddBjS sdB=≤∀−≤ ωωω
Fractional PIλDµ Controller:
8090.06264.0 2195.21199.28159.3)( s
ssk
skksC d
ip ++=++= µ
λ
11
SINTONÍA DE CONTROLADORES PID FRACCIONARIOS
Ejemplo: Simulación
Control of a First-Order Plant Plus an Integrator
3) Flat Phasesec/1)1 radcg =ω degº5.48)2 =mφ
12
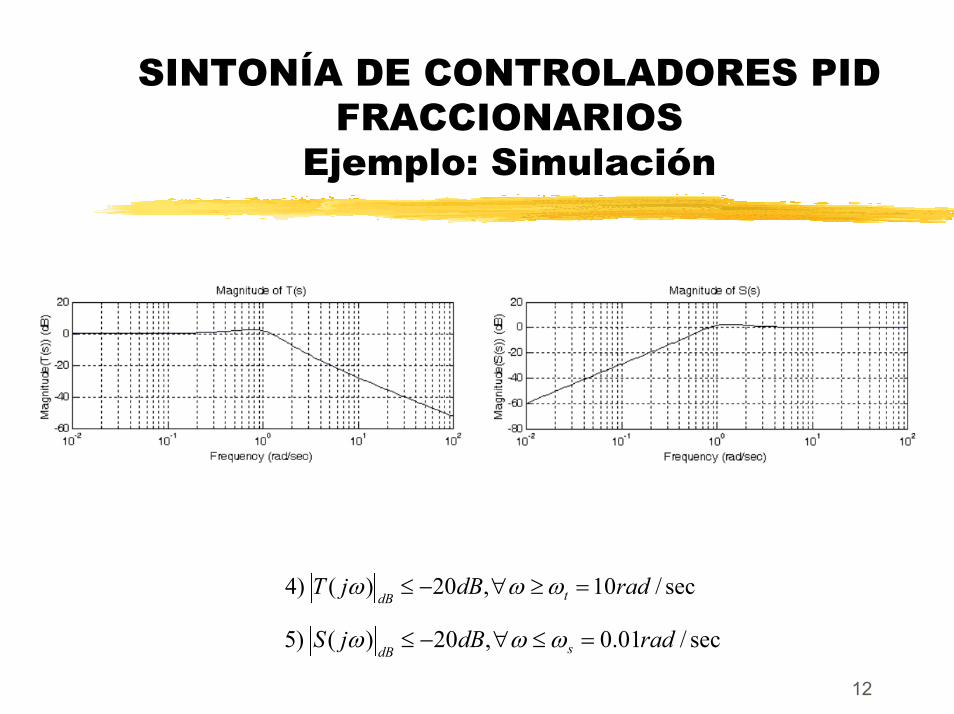
SINTONÍA DE CONTROLADORES PID FRACCIONARIOS
Ejemplo: Simulación
sec/10,20)()4 raddBjT tdB=≥∀−≤ ωωω
sec/01.0,20)()5 raddBjS sdB=≤∀−≤ ωωω
13
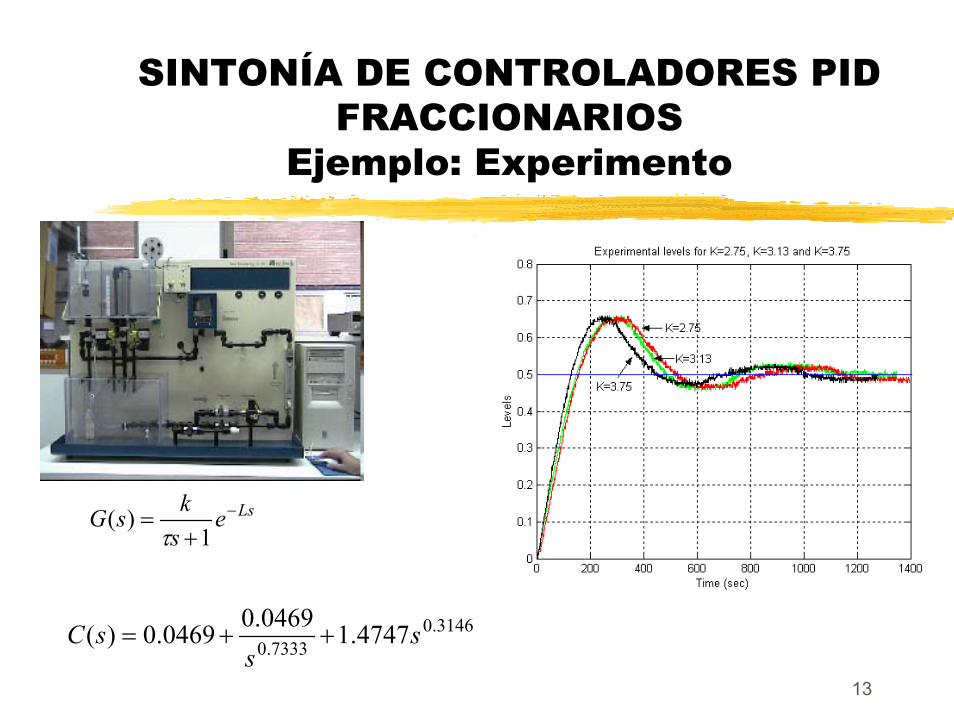
SINTONÍA DE CONTROLADORES PID FRACCIONARIOS
Ejemplo: Experimento
LsesksG −
+=
1)(
τ
3146.07333.0 4747.10469.00469.0)( s
ssC ++=
Design Specifications:
14
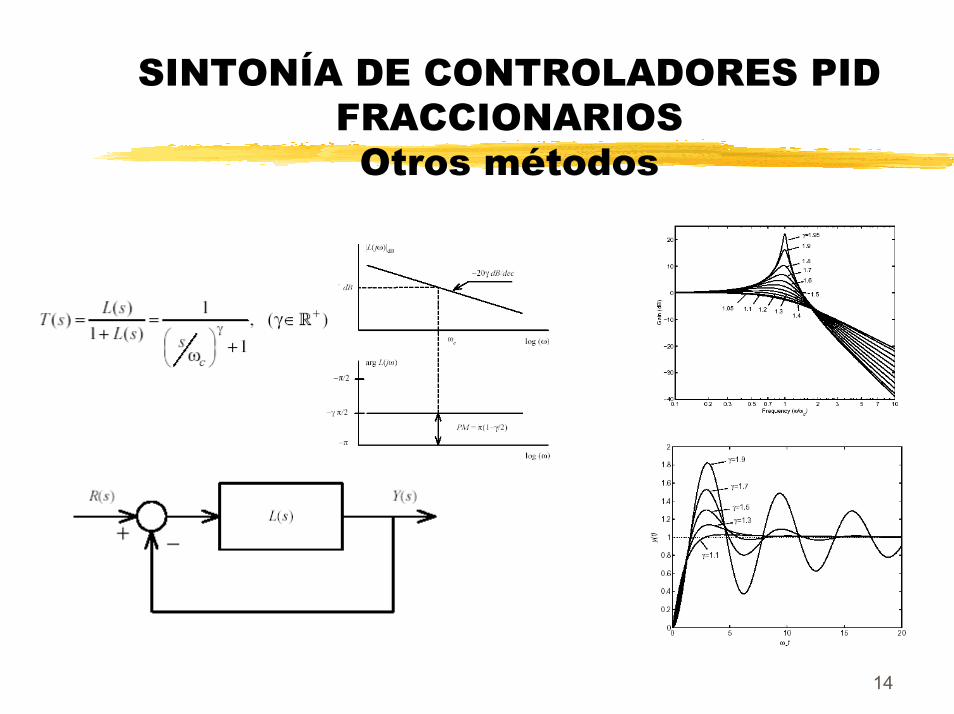
SINTONÍA DE CONTROLADORES PID FRACCIONARIOSOtros métodos

15
SINTONÍA DE CONTROLADORES PID FRACCIONARIOSOtros métodos
Controladores PID – Optimización (Barbosa, Machado, 2003)
16
AUTOSINTONÍA
The idea: automatic tuning of a controller, generally a PID, so that anunknown plant can be controlled, fulfilling several design especifications.
Two parts: a) information of the plant (relay test).b) tuning of the controller with that information.
There are different auto-tuning methods for conventional PID controllers, currently working on industrial environments.The more complex the controller design method, the more difficult theimplementation problem (computer/PLC).
skskksC d
ip ++=)(

17
AUTOSINTONÍA
Auto-Tuning Method for a Fractional PIλDµ Controller.
The introduction of the orders λ and µ allows the fulfillment of a robustness constraint without increasing the complexity of the design method (simple equations).The method uses the relay test to obtain the information of the plant tocontrol, due to its reliability and simplicity.
µλ sk
skksC d
ip ++=)(

18
AUTOSINTONÍA
Relay Auto-Tuning Scheme:
Condition for Oscillation:
Process: G(s) ( ))(
14
)(,)(argaNd
ajGjG ==+−=πωθωπω
ωc: Frequency of interest
12121
1 )( −−−−−
− +−−−
= nnnnn
ncn θθθ
ωωωωθ
n: Curent iteration number
cacc
How to select the right value of θa which corresponds to ωc?
Iterative Process
(θ-1, θ0 ); (ω-1,ω0): Two Initial Values of the Delay and Their Corresponding Frequencies

19
AUTOSINTONÍAMétodo
SPECIFICATIONS OF DESIGN:Crossover Frequency ωcPhase Margin ϕmRobustness Property (flat phase)
Lag Compensator with pole at the origin=PI
Lead Compensator:Noise Filter

20
AUTOSINTONÍAMétodo
1) Robustness Constraint: flat phase of the open-loop system
Slope of the phase of the plant, estimated by the relay test
Constant overshoot for gain variations
λ
λ

21
AUTOSINTONÍAMétodo
2) * Crossover frequency especification, ωc* Phase margin especification, ϕm
Lead Compensator
+ ROBUSTNESS CONSTRAINT (AGAIN)
22
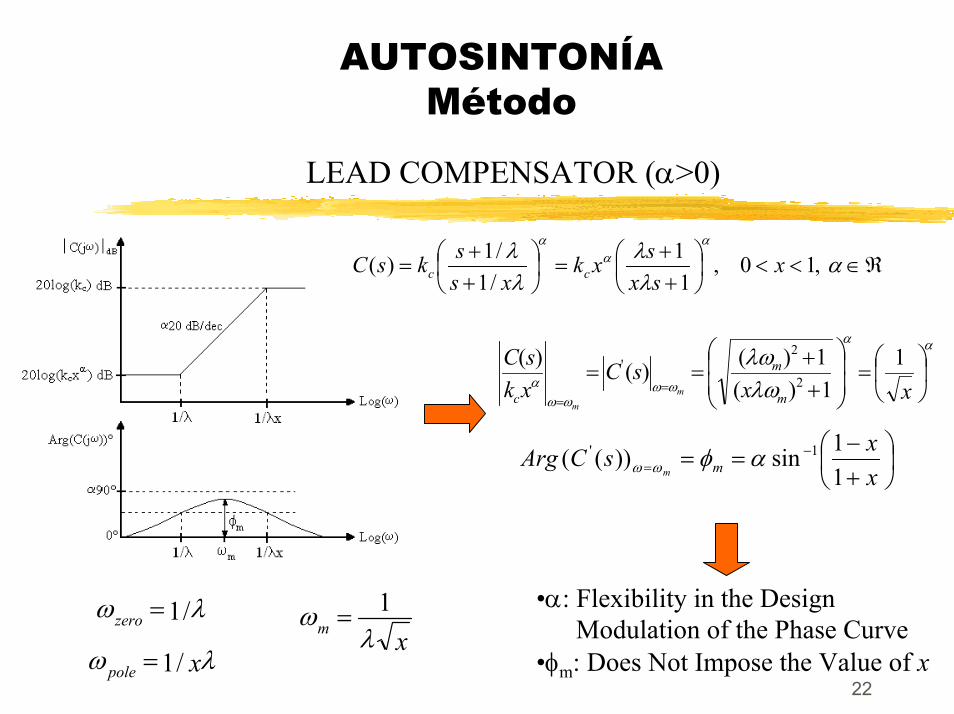
AUTOSINTONÍAMétodo
LEAD COMPENSATOR (α>0)
αα
ωωωω
α λωλω
=
++
===
= xxsC
xksC
m
m
c mm
11)(1)()()(
2
2'
+−
== −= x
xsCArg mm 11sin))(( 1' αφωω
ℜ∈<<
++
=
++
= αλλ
λλ α
αα
,10,1
1/1/1)( x
sxsxk
xssksC cc
•α: Flexibility in the Design Modulation of the Phase Curve
•φm: Does Not Impose the Value of xxm λ
ω 1=λω /1=zero
λω xpole /1=
23
AUTOSINTONÍAMétodo
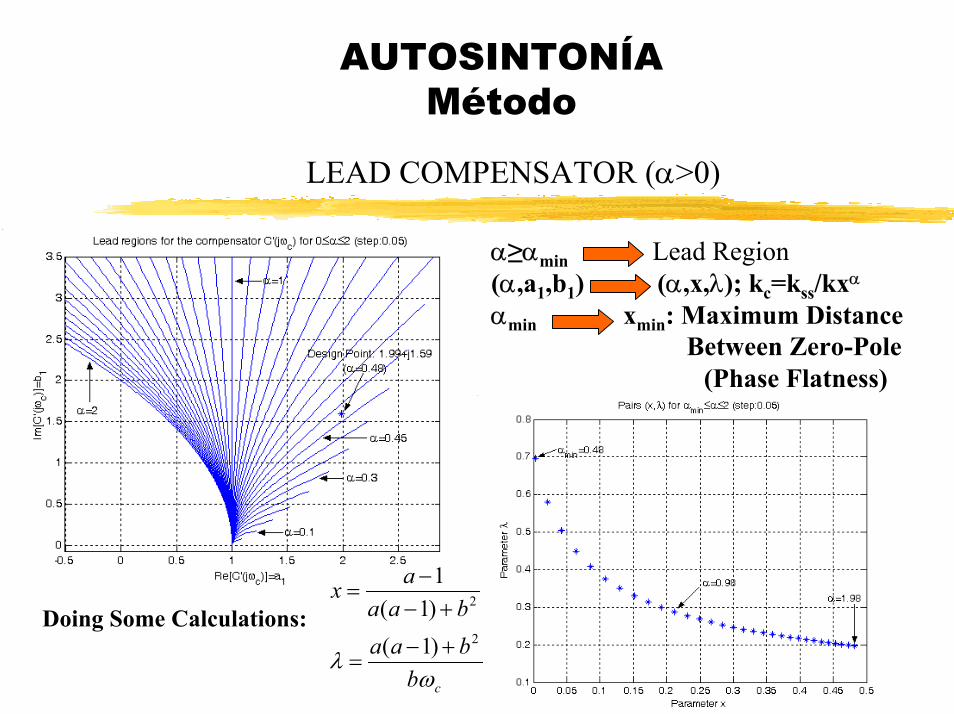
LEAD COMPENSATOR (α>0)
α≥αmin Lead Region(α,a1,b1) (α,x,λ); kc=kss/kxααmin xmin: Maximum Distance
Between Zero-Pole(Phase Flatness)
cbbaabaa
ax
ωλ
2
2
)1()1(1
+−=
+−−
=Doing Some Calculations:

24
AUTOSINTONÍAMétodo
25
AUTOSINTONÍAMétodo
• The relay test: *magnitude and phase of the plant at ω1, ωc, ω2
*estimation of the slope of the phase of the plant• PIλ(s): cancell the slope of the phase of the plant, giving the
minimum lag phase possible=robustness constraint• PDµ(s): fulfills the frequency especifications of ωc and ϕm,
following a robustness constraint• The parameters of the fractional PIλDµ(s) controller are obtained by
simple equations that can be solved by a PLC (industrial application)• The implementation of the fractional controller: we are currently
working on it

26
AUTOSINTONÍAEjemplo: Simulación
UNKNOWN PLANT:
sess
sG 05.0
)16.0(55.0)( −
+=
SPECIFICATIONS OF DESIGN:Robustness ConstraintCrossover Frequency ωc=2.3rad /secPhase Margin ϕm=72o
RELAY TEST:Slope of the phase of the plant=0.2566

27
AUTOSINTONÍAEjemplo: Simulación
UNKNOWN PLANT:
sess
sG 05.0
)16.0(55.0)( −
+=
SPECIFICATIONS OF DESIGN:Robustness ConstraintCrossover Frequency ωc=2.3rad /secPhase Margin ϕm=72o
RELAY TEST:Slope of the phase of the plant=0.2566
28
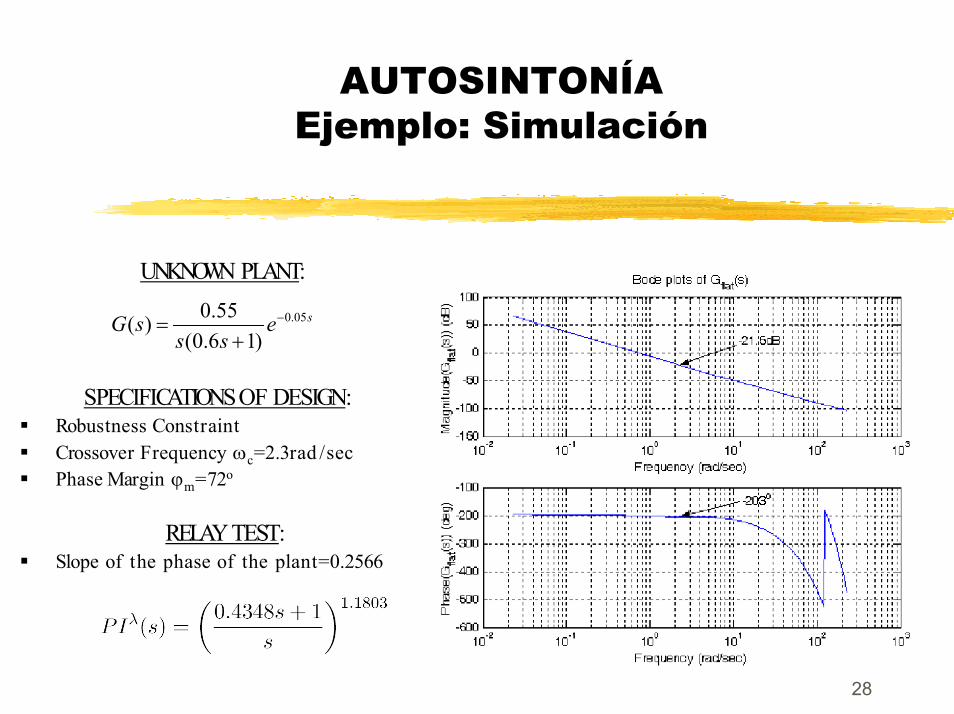
AUTOSINTONÍAEjemplo: Simulación
UNKNOWN PLANT:
sess
sG 05.0
)16.0(55.0)( −
+=
SPECIFICATIONS OF DESIGN:Robustness ConstraintCrossover Frequency ωc=2.3rad /secPhase Margin ϕm=72o
RELAY TEST:Slope of the phase of the plant=0.2566

29
AUTOSINTONÍAEjemplo: Simulación
UNKNOWN PLANT:
sess
sG 05.0
)16.0(55.0)( −
+=
SPECIFICATIONS OF DESIGN:Robustness ConstraintCrossover Frequency ωc=2.3rad /secPhase Margin ϕm=72o
30
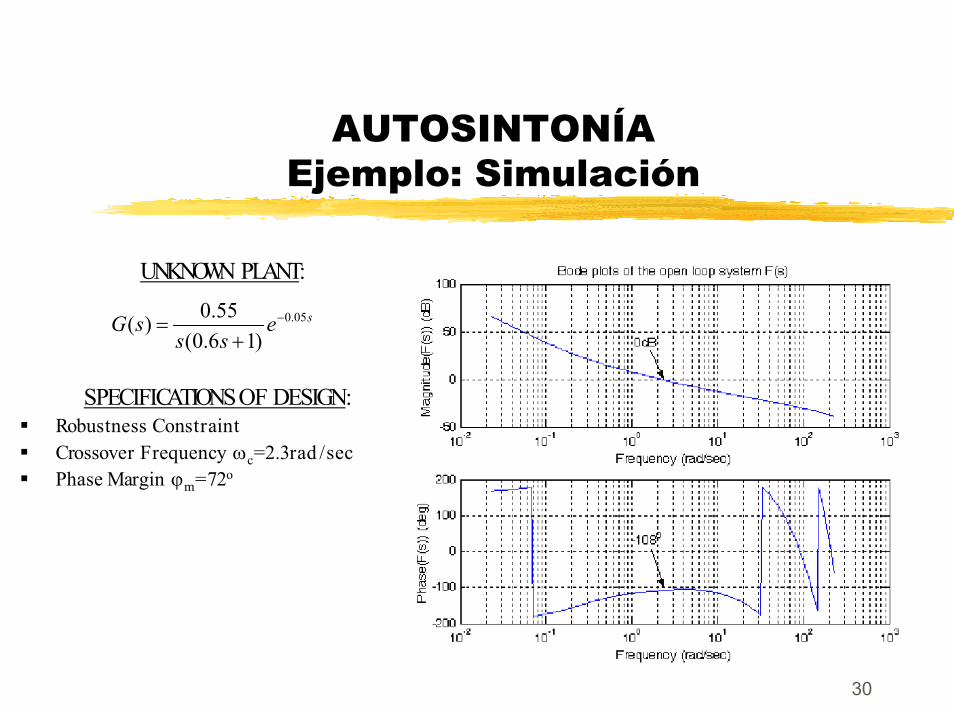
AUTOSINTONÍAEjemplo: Simulación
UNKNOWN PLANT:
sess
sG 05.0
)16.0(55.0)( −
+=
SPECIFICATIONS OF DESIGN:Robustness ConstraintCrossover Frequency ωc=2.3rad /secPhase Margin ϕm=72o

31
AUTOSINTONÍAEjemplo: Simulación

32
AUTOSINTONÍAEjemplo: Experimento
)1()(
+=
ssksG
τ8486.014348.0)(
+
=s
ssPI λ8160.0
10039.010350.4)(
++
=sssPDµ

33
CONCLUSIONES Y TRABAJO FUTURO
ConclusionesMétodo de sintonía: optimización: determinar el valor de los 5parámetros para satisfacer 5 especificaciones de diseño.Método de autosintonía: especificaciones en frecuencia: Test del relé+ compensación en atraso (conseguir fase plana) + compensaciónen adelanto (conseguir especificaciones respetando robustez).Implantaciones en PC y PLC.
Trabajo futuroOtras especificacionesAproximaciones adecuadas para autosintonía: pulsar un botón.