Modelación de flujo bidimensional horizontal con coordenadas ...
127
Transcript of Modelación de flujo bidimensional horizontal con coordenadas ...





ABSTRACT
RESUMEN
1. INTRODUCCIÓN 1
2. VECTORES EN COORDENADAS CURVILÍNEAS GENERALES 7 2.1 Concepto de invariancia 7 2.2 Coordenadas curvilíneas rectangulares y generales 7 2.3 Versiones de un mismo vector en coordenadas generales 9
3. VERSIÓN COVARIANTE DE LAS ECUACIONES DE HIDRODINÁMICA 19 3.1 Versiones de las ecuaciones fundamentales 19 3.2 Ecuaciones en coordenadas rectangulares para flujo bidimensional horizontal 20 3.3 Deducción de la versión covariante de las ecuaciones de hidrodinámica 23 3.4 Modelos de turbulencia 37 3.5 Condiciones de frontera y datos iniciales 37
4. ESQUEMA DE DIFERENCIAS FINITAS 39 4.1 Metodología de cálculo 40 4.2 Discretización de las ecuaciones 42 4.3 Condiciones de frontera 48 4.4 Filtro numérico y condición de estabilidad 51
5. CALIBRACIÓN Y VERIFICACIÓN DEL MODELO NUMÉRICO 53 5.1 Flujo en una curva horizontal 53 5.2 Efecto de un espigón en el flujo de un canal rectangular 58 5.3 Obstáculo de forma irregular 64 5.4 Flujo en un canal horizontal con curvatura compuesta 75
6. CONCLUSIONES Y RECOMENDACIONES 79
7. RECONOCIMIENTO 81
8. REFERENCIAS 83

APÉNDICE A 89 A.1 Base covariante unitaria 89 A.2 Base dual o recíproca de la covariante unitaria 91 A.3 Base contravariante unitaria 95 A.4 Base dual o recíproca de la contravariante unitaria 96 A.5 Resumen de las versiones de vectores de base locales 99
APÉNDICE B 103 B.1 Base covariante del vector q 105 B.2 Base contravariante del vector q 107 B.3 Base covariante unitaria 108 B.4 Base dual o recíproca de la covariante unitaria 110 B.5 Base contravariante unitaria 112 B.6 Base dual de la contravariante unitaria 114
APÉNDICE C 117

ABSTRACT
This paper deals with the development of a horizontal two-dimensional mathematical model of a free surface flow under subcritical regimen designed for the calculation of velocity fields in water bodies whose depth is considerably less than the width of its free surface and whose boundaries are curved and irregularly aligned.
The convenience of using general curvilinear coordinate systems to represent curved boundaries adequately is discussed. Since the use of these types of coordinates entail little known concepts, this paper clarifies in detail the fundamental ideas of the different existing forms of expressing vectors with general curvilinear coordinates.
The choice of the covariant version with physical components of the hydrodynamic equations is discussed, a deduction being made of each term in the general coordinate system. In the hydrodynamic equations are included the terms that take into account the effect of turbulence, which permits the adequate prediction of flow regions with separation and recirculation. Two turbulence models are presented.
The system of partial differential equations with curvilinear coordinates is solved by means of MacCormack´s scheme of finite differences. The numerical model is calibrated and verified with five cases of laboratory measurements.
Among the more relevant contributions of this paper are the explanations of the various ways of expressing a vector with general curvilinear coordinates, the selection and deduction of the most expedient version of the hydrodynamic equations with curvilinear coordinates and the comparison of the numerical model results with the laboratory results.

RESUMEN
Este informe trata el desarrollo de un modelo matemático de flujo bidimensional horizontal a superficie libre en régimen subcrítico, diseñado para calcular el campo de velocidades en cuerpos de agua cuya profundidad es notablemente menor que el ancho de su superficie libre, y cuyas fronteras son curvas o con alineamiento irregular.
Se discute la conveniencia de usar sistemas de coordenadas curvilíneas generales para representar de forma adecuada las fronteras curvas. Dado que el uso de este tipo de coordenadas requiere de conceptos que son poco conocidos, el trabajo aclara con detalle los conceptos fundamentales sobre las distintas versiones que existen para expresar vectores en coordenadas curvilíneas generales.
Se discute la selección de la versión covariante con componentes físicos de las ecuaciones de hidrodinámica, que es la versión usada en el presente trabajo, y se hace la deducción de cada uno de los términos que forman la versión de las ecuaciones en coordenadas generales. En las ecuaciones de hidrodinámica se incluyen los términos que toman en cuenta el efecto de la turbulencia, lo cual permite predecir en forma adecuada zonas de flujo con separación y recirculación. Se presentan dos modelos de turbulencia.
El sistema de ecuaciones diferenciales parciales en coordenadas curvilíneas se resuelve con el esquema de diferencias finitas de MacCormack. El modelo numérico se calibró y verificó con cinco casos de mediciones de laboratorio.
Entre las contribuciones más relevantes de este trabajo están las explicaciones de las distintas formas de expresar un vector en coordenadas curvilíneas generales, la selección y deducción de la versión más adecuada de las ecuaciones de hidrodinámica en coordenadas curvilíneas generales, así como la comparación de los resultados del modelo numérico con mediciones hechas en laboratorio.

1
1. INTRODUCCIÓN
En muchos estudios de hidráulica y de calidad del agua se requiere conocer con detalle el campo de velocidades de un flujo a superficie libre. Ejemplos de estos estudios son: el efecto en las características del flujo al colocar pilas de puente o espigones en un río, la estimación de la erosión y el depósito de sedimento en cauces, el cálculo del transporte y la dispersión de contaminantes en un río, lago, estuario o marina, la predicción de la demanda bioquímica de oxígeno y oxígeno disuelto en almacenamientos, etc. Para resolver en forma adecuada estos problemas es necesario predecir con suficiente aproximación el campo de velocidades.
En la actualidad es común el uso de modelos matemáticos en la solución de problemas de flujos a superficie libre. Dependiendo del problema que se desea resolver, se pueden usar modelos unidimensionales, bidimensionales o tridimensionales. En general, se usa un modelo unidimensional cuando no se necesita el campo de velocidades, y es suficiente con obtener la variación espacial y temporal de la cota del agua en un flujo a superficie libre; ejemplos de este tipo de estudios son los de tránsito de avenidas en ríos y estuarios, sistemas de canales y redes de drenaje, y el efecto en el almacenamiento de una marina o laguna que está conectada al mar por medio de un canal. Cuando además es indispensable conocer el campo de velocidades, se usa un modelo bidimensional o tridimensional.
Debido a que en muchos flujos a superficie libre el componente vertical de la velocidad es mucho menor que los horizontales, y la distribución vertical de la velocidad es casi uniforme en la mayor parte de la profundidad del flujo, es factible usar modelos de flujo bidimensional horizontal; en otros casos, los componentes de la velocidad más importantes son el horizontal y el vertical, por lo que se emplean modelos de flujo bidimensional vertical. Cuando los tres componentes de la velocidad son importantes es necesario usar modelos tridimensionales. En este trabajo se da énfasis a los modelos bidimensionales horizontales, pues con ellos es posible resolver gran cantidad de problemas prácticos; además, la teoría presentada puede ser fácilmente generalizable

2
a modelos bidimensionales verticales o tridimensionales.
Se han desarrollado varios modelos numéricos para predecir el campo de velocidades suponiendo que el flujo es bidimensional horizontal (2DH); la mayoría de ellos se basan en la ecuación de continuidad y en las ecuaciones de cantidad de movimiento en coordenadas rectangulares. Hansen (1962) fue de los primeros en publicar un modelo matemático de flujo 2DH; posteriormente, Leendertse (1967) presentó el desarrollo de un modelo para calcular la propagación de ondas de periodo largo en estuarios y costas. Kuipers y Vreugdenhil (1973) extendieron el modelo de Leendertse para calcular el flujo secundario. Otros modelos del tipo 2DH citados ampliamente en la literatura son el de Falconer (1976), el cual se basa en el de Leendertse, y el de Flokstra (1977), quien indicó que es imposible modelar flujos con circulación si no se incluye el efecto de la turbulencia.
Algunos otros modelos matemáticos muy conocidos aparecen en los textos de Cruickshank y Zumaya (1974), Cruickshank y Zumaya (1977), Abbott (1979), Falconer (1980), Ponce y Yabusaki (1981), Benqué et al (1982) y García y Kahawita (1986), entre muchos otros, quienes proponen distintos esquemas de diferencias finitas para resolver las ecuaciones diferenciales parciales que gobiernan el flujo a superficie libre.
Uno de los últimos modelos publicados que usan coordenadas rectangulares es el de Tingsanchali y Maheswaran (1990), quienes incluyen el modelo k-e para calcular el efecto de la turbulencia generada por un espigón en el campo de flujo; estos autores presentan algunas correcciones al modelo original k-e y a la resistencia al flujo para obtener una calibración adecuada de los resultados del modelo con las mediciones de laboratorio realizadas por Rajaratnam y Nwachukwu (1983). El modelo de Yulistiyanto et al (1998) lo emplean para modelar el efecto de una pila cilíndrica en un flujo; incluyen un procedimiento para calcular los esfuerzos debidos al fenómeno de la turbulencia, y validan su modelo numérico con las mediciones experimentales realizadas por Yulistiyanto (1997). Se considera que los resultados obtenidos son bastante buenos, excepto en la zona cercana a la pared de la pila. Se hace notar que el modelo numérico se basa en la versión conservativa de las ecuaciones de continuidad y cantidad de movimiento en coordenadas rectangulares, las cuales se resuelven con el esquema de diferencias finitas de MacCormack.
Los resultados obtenidos con modelos que utilizan sistemas de coordenadas rectangulares representan un avance importante; sin embargo, gran cantidad de trabajos (Roache, 1972; Pope, 1978; Demirdzic et al, 1987; Rodi et al, 1989; Dammuller et al, 1989; Borthwick y Akponasa, 1997, y muchos otros) permiten concluir que el uso de sistemas de coordenadas rectangulares

3
para representar fronteras con curvatura o con alineamiento distinto a la dirección de los ejes rectangulares, requiere hacer aproximaciones que pueden introducir grandes errores.
Una manera de resolver el problema que presentan las fronteras de forma irregular o con curvatura es usar los métodos de elemento finito; sin embargo, como puede verse, por ejemplo, en Weare (1976), Demirdzic et al (1987), Karki y Patankar (1988), Nielsen y Skovgaard (1990) y Melaaen (1992), estos métodos tienen las desventajas de que consumen más tiempo y recursos de cómputo.
En Thompson et al (1985) e innumerables estudios desarrollados en ingeniería mecánica y aeronáutica durante los últimos 20 años, se muestra la conveniencia de emplear sistemas de coordenadas curvilíneas para representar en forma adecuada fronteras definidas por curvas o con alineamiento diferente al de los ejes rectangulares; la ventaja radica en que al disponer de una malla de coordenadas curvilíneas ajustada a las fronteras, el espacio físico se puede representar en el llamado plano computacional, el cual se define con un plano o conjunto de planos rectangulares, donde el tamaño lateral de las celdas que componen la malla rectangular es unitario y adimensional. Los métodos para la elaboración del conjunto de mallas en coordenadas curvilíneas se describe con detalle, por ejemplo, en Thompson et al (1985), Knupp y Steinberg (1993), Mejía y Berezowsky (1996), entre otros. En el plano computacional, se pueden aplicar los métodos de diferencias finitas para resolver ecuaciones diferenciales en forma similar a como se aplican en coordenadas rectangulares con espaciamiento lateral constante, aprovechando de esta forma la experiencia que se ha ganado al resolver ecuaciones diferenciales en coordenadas rectangulares con métodos de diferencias finitas o volumen finito. De esta manera, el uso de las coordenadas curvilíneas incluye la ventaja que tienen los métodos de elemento finito para la definición de fronteras de forma irregular, y la posibilidad de usar los métodos de diferencias finitas que se emplean para resolver las ecuaciones diferenciales en coordenadas rectangulares, los cuales han sido estudiados ampliamente y son relativamente sencillos.
La desventaja de usar coordenadas curvilíneas generales es que aumenta el número de términos de las ecuaciones de hidrodinámica.
Dos de los primeros modelos matemáticos publicados para calcular el flujo bidimensional horizontal con sistemas de coordenadas curvilíneas ortogonales ajustados a las fronteras son el de Pope (1978) y el de Kalkwijk y De Vriend (1980), quienes usan las ecuaciones de flujo 2DH para calcular el campo de flujo con régimen permanente en canales con fronteras curvas. Entre los modelos publicados más recientes que usan coordenadas curvilíneas ortogonales está el de Shankar et al (1997), quienes emplean los llamados componentes físicos e incluyen un modelo de

4
turbulencia de orden cero.
Se ha hecho notar que cuando la forma de las fronteras es muy irregular, es casi imposible obtener una malla curvilínea que cumpla con la condición de ortogonalidad. En estos casos, no conviene emplear métodos para mallas ortogonales, pues se inducen errores en los cálculos; esta desventaja se elimina al usar las coordenadas curvilíneas generales, con lo que no se requiere cumplir con la condición de ortogonalidad, y el modelo matemático tiene mayor generalidad, además de que la generación de mallas curvilíneas generales es más sencilla que cuando se tiene que cumplir con la condición de ortogonalidad.
Debido a que gran cantidad de problemas de ingeniería hidráulica tratan con ríos, lagunas, estuarios, etc, que están definidos por fronteras de forma irregular, es más recomendable emplear sistemas de coordenadas curvilíneas generales. Con base en la información consultada por los autores de este trabajo, se cree que Johnson (1980) fue el primero en publicar un modelo de hidrodinámica que usa coordenadas curvilíneas generales ajustadas a las fronteras, el cual es de los más ampliamente citados en la literatura.
Se hace notar que cuando se utilizan coordenadas curvilíneas generales se dispone de diversas formas de expresar vectores: entre las más conocidas están la covariante y la contravariante, cuyo significado físico es muy diferente cuando las coordenadas no son ortogonales. Puesto que tanto la velocidad del flujo como las ecuaciones dinámicas se expresan con componentes de un vector, también se tienen distintas versiones de las ecuaciones de hidrodinámica en coordenadas curvilíneas generales. El manejo adecuado de los conceptos fundamentales de estas coordenadas es importante tanto para entender la trasformación de las ecuaciones diferenciales que gobiernan el flujo a superficie libre, como en la selección de la versión más adecuada para el cálculo del correspondiente campo de velocidades.
Entre los últimos modelos matemáticos de hidrodinámica en coordenadas curvilíneas generales que se han publicado están el de Molls y Chaudhry (1995), quienes calculan en forma simultánea el régimen subcrítico y supercrítico en canales con fronteras curvas. La versión de las ecuaciones en coordenadas curvilíneas la obtienen con base en la regla de la cadena, y para modelar la turbulencia se supone que la viscosidad turbulenta es constante. Otro modelo es el presentado por Borthwick y Akponasa (1997) quienes indican que su modelo se basa en la versión contravariante con componentes físicos, e incluyen el efecto de la turbulencia asignando un valor constante a la viscosidad turbulenta.
En este trabajo, se presenta el desarrollo de un modelo matemático para calcular el flujo

5
bidimensional horizontal a superficie libre con régimen subcrítico. El modelo utiliza un sistema de coordenadas curvilíneas generales. En el cap 2 se describen las principales versiones que hay para expresar vectores en coordenadas curvilíneas; se considera que la explicación de dichos conceptos permite aclarar muchas de las discusiones presentadas en otros trabajos publicados, con respecto al tipo de componentes que se deben usar para expresar tanto los componentes de la velocidad como las ecuaciones de hidrodinámica en coordenadas curvilíneas generales.
En el cap 3 se describe la trasformación de la versión rectangular de las ecuaciones de hidrodinámica a la versión covariante con componentes físicos. En el modelo se incluyen los términos que se requieren para tomar en cuenta el efecto de la turbulencia.
El cap 4 presenta un esquema de diferencias finitas; aquí se ha escogido el de MacCormack para discretizar y resolver las ecuaciones de hidrodinámica en coordenadas curvilíneas, junto con las condiciones de frontera. Este esquema es de tipo explícito de segundo orden en el espacio.
En el cap 5 se demuestra la bondad del modelo numérico desarrollado en este estudio. Para ello, se escogieron mediciones de laboratorio de dos campos de velocidades reportadas en la bibliografía, donde se acepta la hipótesis de que el flujo es bidimensional horizontal. Con base en los respectivos datos de los experimentos y el modelo matemático desarrollado, se calcularon los campos de velocidades correspondientes a las distribuciones horizontales de la velocidad, las cuales se compararon con las mediciones de laboratorio. Además, se hicieron experimentos en el canal de pendiente variable del Instituto de Ingeniería, UNAM, y basándose en los datos medidos del campo de velocidades de esas pruebas se revisó el funcionamiento del modelo numérico desarrollado. En estos casos se hace notar la forma cómo se define la malla para el cálculo del campo de velocidades.
Finalmente, las conclusiones y recomendaciones forman el cap 6.

6

7
2. VECTORES EN COORDENADAS CURVILÍNEAS GENERALES
Se presentan primero los conceptos fundamentales necesarios para describir las relaciones que hay entre los sistemas de coordenadas rectangulares y curvilíneos, y después se explican las dos principales versiones, llamadas covariante y contravariante, que hay para expresar vectores en coordenadas curvilíneas generales.
2.1 Concepto de invariancia
En un sistema de coordenadas dado, un punto P queda definido por el conjunto de coordenadas pj. Si se define otro sistema de coordenadas, el mismo punto P queda determinado por otro conjunto de coordenadas pj, pero la ubicación del punto P no se modifica al usar el nuevo sistema de coordenadas; por ello, se dice que un punto es un invariante.
Considérese ahora un par de puntos (P1, P2) que definen al vector q; este vector, en un sistema de referencia particular, está determinado por el conjunto de componentes qj asociados a los ejes del sistema de coordenadas y al correspondiente conjunto de vectores base ej, los cua les tienen las direcciones de los ejes. Si se utiliza otro sistema de coordenadas, el mismo vector q queda determinado por otro conjunto de componentes qj y el correspondiente conjunto de vectores base ej, pero en ambos sistemas de coordenadas el vector conserva la misma magnitud y dirección; por tanto, un vector es también un ente físico invariante.
2.2 Coordenadas curvilíneas rectangulares y generales
En un sistema de coordenadas curvilíneas generales, en cada punto del sistema se identifican dos grupos de vectores base locales: un grupo de estas bases se distingue porque los vectores base son tangentes a los ejes curvilíneos, y el otro porque los

8
vectores base son perpendiculares a dichos ejes. Además, es posible obtener vectores base unitarios, y sus respectivas bases duales. En este trabajo, se demuestra que existen seis versiones para expresar un mismo vector en este tipo de coordenadas. A continuación, se presentan las dos principales versiones de cada grupo, y las otras cuatro se incluyen en el apéndice A.
Se hace notar que el conocimiento correcto de estos conceptos es primordial para expresar las ecuaciones fundamentales en coordenadas curvilíneas, puesto que tanto éstas como la velocidad se expresan con componentes vectoriales.
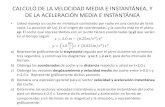
En la fig 2.1 se muestran los sistemas de coordenadas rectangulares (X, Y) y curvilíneas generales (ξ, η); estos sistemas están relacionados por las funciones de trasformación ξ = ξ (X, Y) y η = η (X, Y).
El sistema de coordenadas (ξ, η), se define de tal manera que los ejes son adimensionales y las mallas construidas en dicho sistema tienen espaciamiento unitario; véase por ejemplo, Thompson et al (1985), Knupp y Steinberg (1993) o Mejía y Berezowsky (1996). En Anderson (1995) se demuestra con detalle que cuando el determinante del Jacobiano de la trasformación es diferente de cero, se pueden obtener
Y
X
η
ξ
Fig 2.1 Sistemas de coordenadas rectangulares (X, Y) y curvilíneas generales (ξ, η)

9
las funciones inversas; éstas se denotan como X = X (ξ, η) e Y = Y (ξ, η). El determinante del Jacobiano, J, de la trasformación inversa es
???? ∂
∂∂∂
−∂∂
∂∂
=YXYX
J (2.1)
Nótese que las unidades del Jacobiano son [L2] y geométricamente se interpreta como el área de un cuadrilátero de la malla. A los términos que forman la expresión 2.1 se les conoce como los métricos de la trasformación inversa. También en Anderson (1995) se demuestra que los métricos de las trasformaciones directa e inversa se relacionan con las expresiones siguientes
?1?
∂∂
=∂∂ Y
JX;
?1?
∂∂
−=∂∂ X
JY;
?1?
∂∂−=
∂∂ Y
JX;
?1?
∂∂=
∂∂ X
JY (2.2)
2.3 Versiones de un mismo vector en coordenadas generales
Sea el vector de posición r mostrado en la fig 2.2, definido en el plano rectangular como función de las coordenadas rectangulares
( ) ( ) yx YX eer ?,??,? += (2.3)
ξη variable
constante
ξ constantevariable η
eη
eξ
ξP
r (X, Y)
ηq
ey
ex
Y
X
Fig 2.2 Vectores base covariantes

10
donde ex y ey son los vectores unitarios (adimensionales) asociados a las direcciones de los ejes rectangulares X e Y respectivamente. Y sea q otro vector que tiene su origen donde termina el vector r. El vector q expresado con coordenadas rectangulares es
yx vu eeq += (2.4)
Para los fines de este trabajo, el vector q representa la velocidad del flujo en el punto P; por tanto, los componentes rectangulares u y v tienen unidades de [L T-1]. En caso de trabajar con otro vector, por ejemplo, fuerza, sus componentes tendrían las unidades correspondientes. A continuación, se describe primero cómo se expresa un vector en función de los vectores base locales covariantes y componentes contravariantes, y después, el mismo vector expresado con los vectores base locales contravariantes y componentes covariantes.
2.3.1 Base local covariante
El vector q se puede expresar en función de vectores base locales covariantes y componentes contravariantes como
??
?? eeq vu += (2.5)
donde eξ y eη se conocen como los vectores base locales covariantes en el punto P, y uξ y vη son los componentes contravariantes del vector. Las derivadas parciales del vector de posición r con respecto a las coordenadas curvilíneas, definen a los vectores base locales covariantes en el punto P, es decir
yxYX
eer
e???? ∂
∂+
∂∂
=∂∂
= yxYX
eer
e???? ∂
∂+
∂∂
=∂∂
= (2.6)
El vector eξ es tangente al eje curvilíneo ξ , y eη es tangente al eje curvilíneo η, ambos en el punto P, como se muestra en la fig 2.2. Se hace notar que estos vectores base locales covariantes, en general, no son unitarios y tienen unidades de longitud [L]. Al escribir las expresiones 2.6 en forma de ecuaciones lineales, los métricos de la trasformación inversa se pueden expresar en notación matricial como
∂∂
∂∂
∂∂
∂∂
=
??
??YX
YX
CV (2.7)

11
La matriz CV se puede interpretar como aquella que permite obtener, en cualquier punto del plano (ξ, η), los componentes de los vectores base locales covariantes a partir de los vectores base del sistema rectangular. Por definición, a los vectores cuyos componentes son obtenidos con la matriz CV se les denomina covariantes y se les denota con un subíndice.
Para obtener las expresiones que relacionan a los componentes rectangulares con los componentes contravariantes del vector q se aplican las expresiones siguientes
[ ] xvuu eee ⋅+= ??
?? [ ] yvuv eee ⋅+= ?
??
? (2.8)
Al sustituir las expresiones 2.6 en 2.8, y después de desarrollarlas, se obtienen los componentes rectangulares del vector q en función de los métricos inversos de la trasformación y de los componentes contravariantes del mismo vector:
??
??v
Xu
Xu
∂∂
+∂∂
= ??
??v
Yu
Yv
∂∂
+∂∂
= (2.9)
Las expresiones 2.9 se pueden tratar como un sistema lineal de ecuaciones, de donde se despejan los componentes contravariantes en función de los componentes rectangulares:
vX
Ju
YJ
u?
1?
1?
∂∂
−∂∂
= vX
Ju
YJ
v?
1?
1?
∂∂
+∂∂
−= (2.10)
De estas expresiones se deduce que las unidades de los componentes contravariantes son [T-1]. Asimismo, al escribir las expresiones 2.10 con notación matricial, los elementos métricos de la trasformación inversa quedan en la matriz siguiente
∂∂
∂∂−
∂∂−
∂∂
=
?1
?1
?1
?1
XJ
YJ
XJ
YJ
CT (2.11)
Los componentes obtenidos con la matriz CT, por definición, se dice que son contravariantes y se les denota con un superíndice.
A primera vista parecería que los nombres covariante y contravariante tienen una interpretación física de oposición; sin embargo, no es así. Una discusión del tema puede

12
verse por ejemplo en el cap 5 de http://www.mathpages.com/rr/s5-02/5-02.htm o en Truesdell (1953).
El cuadrado del módulo del vector q se obtiene del producto escalar sobre sí mismo, es decir
( ) ( )??
??
??
??2
eeeeq vuvu +⋅+= (2.12)
Al desarrollar la expresión 2.12, se tiene que la magnitud de q en función de los vectores base locales covariantes y componentes contravariantes está dada por
( ) ( )2?22
??12
2?11 2 vgvugug ++=q (2.13)
donde
22
??11 ??
∂∂
+
∂∂
=⋅=YX
g ee 22
??22 ??
∂∂
+
∂∂
=⋅=YX
g ee
(2.14)
??????12 ∂∂
∂∂
+∂∂
∂∂
=⋅=YYXX
g ee 12??21 gg =⋅= ee
A 221211 y, ggg se les conoce como los elementos del tensor métrico covariante; nótese que éstos están en función de los vectores base locales covariantes. La raíz cuadrada del determinante del tensor métrico covariante, definido como *g , es igual al Jacobiano J, y ambos son iguales al área de la superficie de un cuadrilátero en el sistema de coordenadas curvilíneas; por tanto
2122211* ggggJ −== (2.15)
Además, el ángulo θ1 entre los dos vectores base locales covariantes se obtiene de
1???? ?coseeee =⋅ (2.16)
2.3.2 Base local contravariante
El vector q en función de los vectores base locales contravariantes y componentes covariantes se expresa de la manera siguiente:

13
??
?? eeq vu += (2.17)
donde eξ y eη forman también una base local de vectores del sistema de coordenadas curvilíneas. A estos vectores base se les conoce como contravariantes, y a los componentes uξ y vη que los acompañan como covariantes. En este caso, eξ es perpendicular al eje curvilíneo dado por ξ constante, y eη es perpendicular al eje η constante, como se muestra en la fig 2.3. Estos se obtienen al aplicar el operador gradiente como sigue:
yx YXYX eee
∂∂
+∂∂
=∇=??
),(?? yx YXYX eee
∂∂
+∂∂
=∇=??
),(?? (2.18)
Al sustituir las igualdades de 2.2 en 2.18, se obtiene que los vectores base contravariantes se expresan como sigue:
yxX
gY
geee
?1
?1
**
?
∂∂
−∂∂
= yxX
gY
geee
?1
?1
**
?
∂∂
+∂∂
−= (2.19)
eη
eξ
ηY
X
P
Fig 2.3 Vectores base contravariantes
r (X ), Yξ
q

14
Con ayuda de la notación matricial las ecs 2.19 se pueden expresar como una ecuación matricial, de donde se deduce que la matriz de coeficientes es idéntica a la definida como CT (ec 2.11). Por ello, esta base local de vectores recibe el nombre de contravariante. Estos vectores base locales tampoco son unitarios ni adimensionales; para este caso sus unidades son [L-1]. Nuevamente, para obtener las expresiones que relacionan a los componentes rectangulares del vector velocidad q con los componentes covariantes, se aplica el producto escalar del vector q con los vectores base del sistema rectangular como sigue:
[ ] xvuu eee ⋅+= ??
?? [ ] yvuv eee ⋅+= ?
??
? (2.20)
Al sustituir las expresiones 2.19 en 2.20 y después de desarrollarlas, se obtienen los componentes rectangulares en función de los métricos inversos y de los componentes covariantes del vector q
?*
?* ?
1?
1v
Yg
uY
gu
∂∂
−∂∂
= ; ?*
?* ?
1?
1v
Xg
uX
gv
∂∂
+∂∂
−= (2.21)
Las ecs 2.21 se pueden manejar como un sistema lineal, de donde se despejan los componentes covariantes como sigue:
vY
uX
u??? ∂
∂+
∂∂
= vY
uX
v??? ∂
∂+
∂∂
= (2.22)
Nótese que las unidades de los componentes covariantes de las ecs 2.22 son [L2 T-1]; si las ecs 2.22 se expresan como una ecuación matricial, la matriz de coeficientes es idéntica a la CV definida por la ec 2.7.
El cuadrado del módulo del vector en función de los vectores base locales contravariantes y componentes covariantes se obtiene al aplicar el producto escalar del vector con respecto a sí mismo, como sigue:
( ) ( )??
??
??
??
2eeeeq vuvu +⋅+= (2.23)
Al desarrollar esta expresión se tiene que
2?
22??
122?
11 2 vgvugug ++=q (2.24)

15
donde 221211 y, ggg se conocen como los elementos del tensor métrico contravariante, y se obtienen de la manera siguiente:
;*
22??11
gg
g =⋅= ee ;*
11??22
gg
g =⋅= ee *
12??12
gg
g −=⋅= ee (2.25)
Es importante aclarar que los vectores base locales contravariantes también se conocen como vectores base recíprocos o base dual de los vectores base covariantes, ya que entre estas dos bases se cumplen las igualdades siguientes:
0;0;1;1 ??
??
??
?? =⋅=⋅=⋅=⋅ eeeeeeee (2.26)
A partir de las expresiones 2.26, conocidos los vectores base covariantes, se pueden obtener los vectores base contravariantes y viceversa. Por tanto, se puede demostrar que el tensor métrico contravariante es el inverso del tensor métrico covariante, por lo que se cumple que el producto escalar de estos dos tensores es el tensor identidad.
2.3.3 Bases unitarias y sus correspondientes bases duales
Distintos investigadores, por ejemplo Borthwick y Akponasa (1997), han considerado que no es conveniente utilizar la forma covariante o contravariante para trasformar las ecuaciones de coordenadas rectangulares a curvilíneas. Esto se debe a que tanto los vectores base locales como los correspondientes componentes tienen unidades y escalas diferentes con respecto a los del sistema rectangular. Se ha encontrado que estas diferencias producen problemas en los métodos de solución para resolver las ecuaciones de hidrodinámica en coordenadas curvilíneas generales. Para evitar esta desventaja se ha propuesto dividir a los vectores base entre su módulo; de esta manera se tienen vectores base unitarios con componentes, llamados físicos, que tienen unidades y escalas iguales a las que se tienen en el sistema rectangular. A los componentes de las bases unitarias y adimensionales se les denota con un subíndice (o superíndice) entre paréntesis, como puede verse en el apéndice A.
Cada una de estas dos nuevas bases locales de vectores unitarios, la covariante y la contravariante, tienen sus correspondientes bases recíprocas; así, la base dual de los vectores base covariantes unitarios se obtiene de
0;0;1;1 ??
??
??
?? =⋅=⋅=⋅=⋅ EeEeEeEe (2.27)

16
De manera similar, la base dual de los vectores base contravariantes se obtiene de
0;0;1;1 ???? =⋅=⋅=⋅=⋅ ηξηξ EeEeEeEe (2.28)
Así, se dispone en total de seis formas diferentes para expresar un vector en coordenadas curvilíneas generales. En la tabla 2.1 se incluyen las expresiones de los vectores base unitarios covariantes y contravariantes, sus correspondientes bases recíprocas y también los correspondientes componentes que los acompañan. En el apéndice A, al final de este trabajo, se deducen las expresiones de dicha tabla, y en el apéndice B se explica con un ejemplo numérico la forma de expresar un mismo vector en función de cada una de las seis bases posibles.

17
TABLA 2.1 VERSIONES DEL VECTOR q EN FUNCIÓN DE BASES UNITARIAS Y RECÍPROCAS
Base covariante unitaria Base dual de la covariante unitaria
)?()?(
)?()?( eeq vu += ?
??
? EEq VU +=
yxY
gX
geee
?1
?1
1111)?( ∂
∂+
∂∂
= yxX
g
gY
g
geeE
?? *
11
*
11?
∂∂
−∂∂
=
yxY
gX
geee
?1
?1
2222)?( ∂
∂+
∂∂
= yxX
g
gY
g
geeE
?? *
22
*
22?
∂∂
+∂∂
−=
vX
g
gu
Y
g
gu
?? *
11
*
11)?(
∂∂
−∂∂
= vY
gu
Xg
U?
1?
1
1111? ∂
∂+
∂∂
=
vX
g
gu
Y
g
gv
?? *
22
*
22)?(
∂∂
+∂∂
−= vY
gu
Xg
V?
1?
1
2222? ∂
∂+
∂∂
=
Base contravariante unitaria Base dual de la contravariante unitaria
)?()?(
)?()?( eeq v+= u ?
??
? EEq VU +=
yxX
gY
geee
?1
?1
2222
)?(
∂∂
−∂∂
= yxY
g
gX
g
geeE
?? *
22
*
22? ∂
∂+
∂∂
=
yxX
gY
geee
?1
?1
1111
)?(
∂∂
+∂∂
−= yxY
g
gX
g
geeE
?? *
11
*
11? ∂
∂+
∂∂
=
vY
g
gu
X
g
gu
?? *
22
*
22)?( ∂
∂+
∂∂
= vX
gu
Yg
U?
1?
1
2222
?
∂∂
−∂∂
=
vY
g
gu
X
g
gv
?? *
11
*
11? ∂
∂+
∂∂
=)( vX
gu
Yg
V?
1?
1
1111
?
∂∂
+∂∂
−=


19
3. VERSIÓN COVARIANTE DE LAS ECUACIONES DE HIDRODINÁMICA
3.1 Versiones de las ecuaciones fundamentales
Existen varias versiones de las ecuaciones fundamentales de hidráulica, por lo que cuando se desea resolver algún problema se debe escoger la más adecuada. Para identificar las diferentes versiones de las ecuaciones conviene hacer la clasificación siguiente.
3.1.1 Versiones conservativas y no conservativas
Se define como la versión conservativa de una ecuación a aquella que se obtiene al aplicar un principio (de masa o cantidad de movimiento) a un volumen de control que permanece fijo con respecto a un sistema de referencia. Las ecuaciones así obtenidas cumplen con la expresión conocida como divergencia de una función. En caso de que el volumen de control sea móvil, y que dicho volumen conserve su masa invariante mientras que su volumen y forma cambian, se dice que la ecuación es no conservativa. Conviene aclarar que aunque las ecuaciones obtenidas, la conservativa y la no conservativa, son equivalentes desde el punto de vista matemático, algunos términos de la versión no conservativa no representan el concepto físico que se está tratando.
3.1.2 Versiones integrales y diferenciales
Cuando se acepta que las variables del flujo son funciones discontinuas, se requieren ecuaciones integrales, mientras que cuando las variables son continuas, las ecuaciones pueden ser integrales o diferenciales. Con base en las definiciones anteriores, existen versiones conservativas integrales y conservativas diferenciales, y versiones no conservativas integrales y no conservativas diferenciales. Una discusión detallada de estos conceptos y la deducción de cada una de las versiones de las ecuaciones

20
fundamentales se puede consultar en Anderson (1995). En la misma publicación se muestra la forma de deducir una versión cualquiera a partir de otra.
Por lo anterior, se requiere usar versiones integrales de las ecuaciones cuando las variables del flujo pueden ser funciones discontinuas, mientras que si se tiene la seguridad de que las variables son continuas se pueden usar versiones integrales o diferenciales. Esto es fundamental para la selección del método numérico que se emplee.
3.2 Ecuaciones en coordenadas rectangulares para flujo bidimensional horizontal
En gran cantidad de textos se puede ver que a partir de la segunda ley de Newton se deducen las versiones conservativas y no conservativas de las ecuaciones de Navier–Stokes para flujos tridimensionales (véase, por ejemplo, Daily y Harleman, 1966; Maza y García, 1984; Anderson, 1995, etc).
A partir de las ecuaciones de Navier–Stokes, Reynolds (1895) obtuvo las ecuaciones de cantidad de movimiento para un fluido newtoniano, en función de valores medios temporales de los componentes del vector velocidad y de la presión; a dichas expresiones se les conoce como ecuaciones de Reynolds. La derivación de estas ecuaciones se muestra, por ejemplo, en Hinze (1959) y Daily y Harleman (1966).
Cuando las dimensiones en planta de un flujo a superficie libre son notablemente mayores en comparación con la profundidad del mismo, se acepta que la velocidad media del flujo se puede representar en forma adecuada únicamente con sus dos componentes horizontales. Con base en esta suposición, las ecuaciones de Reynolds se integran sobre toda la profundidad del flujo con la regla de Leibnitz. Las ecuaciones resultantes son conocidas como las ecuaciones de cantidad de movimiento para flujos bidimensionales horizontales a superficie libre. La derivación detallada de estas ecuaciones queda fuera de los objetivos del presente trabajo, pero se puede consultar, por ejemplo, en Kuipers y Vreugdenhil (1973), Abbott (1979) o Chaudhry (1993). Para su derivación se hacen las hipótesis siguientes:
a) La densidad es constante por lo que el fluido es incompresible
b) La distribución de la velocidad es uniforme en toda la profundidad del flujo
c) Tanto el componente vertical de la velocidad como la aceleración son despreciables

21
d) El fondo del canal es rígido y de pendiente suave
e) Los esfuerzos de fricción en el fondo se pueden calcular con fórmulas de flujo uniforme.
Además, en este trabajo, se considera que el efecto de la turbulencia se puede modelar en forma adecuada con los esfuerzos de Boussinesq, y que no hay discontinuidades en el flujo, como saltos hidráulicos o frentes de onda, por lo que se puede usar la versión diferencial de las ecuaciones de cantidad de movimiento, llamadas también ecuaciones dinámicas, las cuales junto con la ecuación de continuidad se conocen como ecuaciones de hidrodinámica para flujos bidimensionales horizontales a superficie libre.
La versión conservativa diferencial de la ecuación de continuidad es
0=∂∂
+∂∂
+∂
∂Yvh
Xuh
tH
(3.1a)
La versión conservativa de los componentes de las ecuaciones de cantidad de movimiento son, respectivamente (véase Chaudhry, 1993):
xyxxfxox Th
YT
hX
SSghh
Xg
Yuvh
Xhu
tuh
??)(
2
22
∂∂
+∂∂
+−=∂∂
+∂
∂+
∂∂
+∂
∂ (3.1b)
yyxyfyoy Th
YT
hX
SSghh
Yg
Yhv
Xuvh
tvh
??)(
2
22
∂∂
+∂∂
+−=∂∂
+∂
∂+
∂∂
+∂∂
(3.1c)
donde u y v son los componentes rectangulares de la velocidad, con distribución vertical uniforme, los cuales se definen como
∫=h
dZZh
u0
)(u1
y ∫=h
0)(v
1dZZ
hv
u(Z) y v(Z) son las distribuciones verticales de la velocidad, H es la cota de la superficie libre del agua, h el tirante, Sox y Soy las pendientes de la plantilla del canal en las direcciones de los ejes X e Y, respectivamente, Sfx y Sfy las pendientes de la línea de energía también en las direcciones de los ejes X e Y, ρ la densidad del agua, g la aceleración de la gravedad y Txx, Txy y Txy los esfuerzos de turbulencia, los cuales se discuten a continuación.

22
En Kuipers y Vreugenhil (1973) y Flokstra (1977) se explica que cada uno de los esfuerzos efectivos, es decir Txx, Txy y Tyy, están formados por tres partes que son: los esfuerzos viscosos laminares, los turbulentos debidos a las variaciones en el tiempo y en un mismo punto de la velocidad, y los que incluyen el efecto de que la distribución vertical de la velocidad no es uniforme. Dado que los esfuerzos turbulentos son más importantes que los demás (véase, por ejemplo, Rastogi y Rodi, 1978), en este trabajo sólo se consideran los esfuerzos turbulentos, los cuales se pueden expresar con el concepto de Boussinesq (1877) de la llamada viscosidad turbulenta como sigue:
X u
2 = T xx∂∂
?? t ; Y v
2 = T yy∂∂
?? t ;
∂∂
∂∂
X v
+ Y u
= T xy ?? t (3.2)
donde vt es la llamada viscosidad turbulenta, la cual es una variable por determinar.
Cunge et al (1980) y Chaudhry (1993), indican que las ecs 3.1b y 3.1c son estrictamente conservativas cuando los términos del lado derecho de las ecs son nulos.
A partir de las expresiones 3.1 se puede obtener la correspondiente versión no conservativa; para ello, se desarrollan las derivadas de 3.1b y 3.1c, y se usa la ecuación de continuidad 3.1a para eliminar algunos términos; de esta manera se obtienen las expresiones siguientes:
∂∂
+∂∂
++=∂∂
+∂∂
+∂∂
+∂∂
xyxx hTY
hTXh
vuhu
Cg
XH
gYu
vXu
utu
?122
2 (3.3a)
∂∂
+∂∂
++=∂∂
+∂∂
+∂∂
+∂∂
yyxy hTY
hTXh
vuhv
Cg
YH
gYv
vXv
utv
?122
2 (3.3b)
donde la pendiente de la línea de energía se calcula con la fórmula de Chezy; y C es el coeficiente de fricción de Chezy. Esta versión ha sido ampliamente usada en distintos trabajos de investigación, como por ejemplo: Ponce y Yabusaki (1981), Tingsanchali y Maheswaran (1990), Borthwick y Barber (1992) y Borthwick y Akponasa (1997), entre otros.
Las expresiones 3.3 son los componentes rectangulares de la versión diferencial no conservativa de las ecuaciones de cantidad de movimiento, integradas en la profundidad. Estas expresiones también se conocen como ecuaciones dinámicas, precisamente porque estrictamente sus términos no representan el concepto de conservación de cantidad de movimiento, como en las ecs 3.1b y 3.1c.

23
3.3 Deducción de la versión covariante de las ecuaciones de hidrodinámica
En el cap 2 se explicó que un vector se puede expresar de distintas formas cuando se usan coordenadas curvilíneas. Puesto que las ecuaciones dinámicas son componentes vecto-riales, éstas se pueden expresar también ya sea como componentes covariantes o contravariantes en un sistema de coordenadas curvilíneas generales. En la fig 3.1 se muestra una clasificación de las principales versiones que hay de las ecuaciones de hidrodinámica en función del tipo de coordenadas.
En general, la mayoría de los últimos trabajos publicados de modelos numéricos que usan coordenadas curvilíneas generales utilizan componentes contravariantes físicos para representar a la velocidad; por ejemplo, en Demirdzic et al (1987) y Takizawa et al (1992) se usan los componentes contravariantes físicos de la velocidad; Segal et al (1992) utilizan como variables dependientes a los componentes contravariantes de la velocidad multipli-cados por el Jacobiano de la trasformación; Melaaen (1992) utiliza los componentes contravariantes proyectados sobre las direcciones de los vectores base contravariantes; He y Salcudean (1994) y He et al (1996) emplean también los componentes contravariantes físicos.
Coordenadas
Rectangulares
Curvilíneas
Ortogonales
Generales
Covariante
ContravarianteComponentes no físicos
Componentes físicos
Componentesno físicos
Componentesfísicos
Fig 3.1 Clasificación de las ecuaciones de hidrodinámica

24
Aunque parece ser que hay cierta preferencia por usar los componentes contravariantes físicos para representar a la velocidad en los modelos numéricos desarrollados, los autores del presente trabajo consideran que, con base en la interpretación geométrica de las distintas formas de expresar un vector, es mejor usar la versión covariante con componentes físicos, como se mostró en el cap 2; los vectores base contravariantes físicos son perpendiculares a los ejes curvilíneos, lo que garantiza que el cálculo del flujo de masa que pasa por una sección trasversal se haga de manera correcta, esto facilita revisar la conservación de masa. Dicha condición no se cumple cuando se usa la versión contravariante, puesto que en ese caso los correspondientes vectores base locales covariantes son tangentes (pero no necesariamente perpendiculares) a los ejes curvilíneos.
Para simplificar la notación de los métricos se hacen las definiciones siguientes:
???? ??? Y
= y ; X
= x ; Y
= y ; X
= x∂∂
∂∂
∂∂
∂∂
ξ
Como se demuestra en el apéndice A, los componentes cova riantes físicos, u(?) y v(?), y los componentes rectangulares, u y v, del vector velocidad están relacionados por las expresiones
v y g
gu x
g
g = u )( ?
*
22?
*
22? + (3.4a)
v y g
g+u x
g
g = v )( ?
*
11?
*
11? (3.4b)
o en forma inversa
v g
y u
g
y =u )()( ?
11
??
22
? − (3.5a)
vg
x + u
g
x = v )()( ?
11
??
22
?− (3.5b)
En las expresiones 3.4, se observa cómo se obtienen los componentes covariantes físicos del vector velocidad en función de los componentes rectangulares; de manera

25
similar se obtienen los componentes covariantes físicos de las ecuaciones dinámicas en coordenadas curvilíneas generales. Así, para obtener tales ecuaciones en función de las coordenadas del sistema curvilíneo, se siguen estos tres pasos.
a) Con base en la regla de la cadena, todas las derivadas parciales con respecto a las coordenadas rectangulares se sustituyen por derivadas parciales con respecto a las coordenadas curvilíneas.
b) Los componentes rectangulares de la velocidad se sustituyen por sus correspondientes componentes covariantes físicos dados por las ecs 3.5. Las ecuaciones así obtenidas siguen siendo las ecuaciones dinámicas en las direcciones del sistema rectangular.
c) A los componentes rectangulares de la ecuación dinámica obtenidas en el inciso anterior, se les aplica la trasformación dada por las ecs 3.4, con lo cual se obtienen las ecuaciones dinámicas en dirección perpendicular a los ejes curvilíneos, en términos de las coordenadas curvilíneas y de los componentes covariantes físicos.
Con base en la regla de la cadena, las derivadas parciales de una función cualquiera f(X, Y) se expresan en función de las coordenadas curvilíneas y los parámetros métricos como sigue:
?? *
?
*
?
f
g
y
f
g
y =
X f
∂∂
−∂∂
∂∂
(3.6a)
?? *
?
*
?
f
gx
+ f
g
x =
Y f
∂∂
∂∂
−∂∂ (3.6b)
3.3.1 Ecuación dinámica en la dirección normal al eje curvilíneo ? constante
A continuación, se deduce con detalle cada uno de los términos que forman la versión covariante con componentes físicos de la ecuación dinámica en la dirección normal al eje curvilíneo ? constante, en coordenadas curvilíneas generales.
Aceleración local
Con base en las ecs 3.4, los componentes rectangulares de la aceleración local se expresan como (primer término de las ecs 3.3a y 3.3b)

26
∂∂
∂∂
v xg
g + u x
g
g
t =
t u
= ALX )(11
)(22
??*
?*
ξ (3.7a)
∂∂
∂∂
v yg
g + u y
g
g
t =
t v
= ALY )(11
)(22
??*
??*
(3.7b)
El término de la aceleración local en la dirección normal al eje ? constante se obtiene como sigue (véase ec 3.4a)
ALYyg
g ALXx
g
g = AL ?
*
22?
*
22 + (3.8)
Al sustituir las ecs 3.7 en la 3.8, y puesto que los parámetros métricos no cambian con el tiempo, se puede tomar como factor común a las derivadas parciales de los componentes covariantes físicos de la velocidad, es decir
t
v
g
yxyx
g
gt
u
g
yxyxAL
∂
∂+−+
∂
∂−= )?(
*
????
11
22)?(
*
???? )()( (3.9)
Después de simplificar algunos términos en 3.9, se obtiene
t
u = AL )(
∂
∂ ? (3.10)
Aceleración convectiva
La parte convectiva de la ecuación dinámica en la dirección del vector ex se define como (segundo y tercer sumandos de la ec 3.3a)
Y u
v + X u
u = ACX∂∂
∂∂
(3.11a)
y con respecto a la dirección del vector ey es (segundo y tercer términos de la ec 3.3b)
Y v
v + X v
u = ACY∂∂
∂∂
(3.11b)
Al aplicar la regla de la cadena en las ecs 3.11, y tomar como factor común las derivadas parciales de los componentes rectangulares u y v, se obtiene

27
?
)(
?
)(
*
??
*
??
∂∂
∂∂ u
g
v x +u y- +
u
g
v x -u y = ACX (3.12a)
?
)(
?
)( ????
∂∂
∂∂ v
g
vxu + y- +
vg
vxu - yACY =
**
(3.12b)
La aceleración convectiva en la dirección normal al eje ξ constante se obtiene como (ec 3.4a)
ACYyg
gACXx
g
gAC ?
*
22?
*
22 += (3.13)
Al sustituir las ecs 3.12 y los componentes rectangulares de la velocidad que están fuera de las derivadas parciales en función de los componentes covariantes, en la ec 3.13 resulta
+
∂∂
+∂∂
+
−−
−=
?? ??)?(11
?)?(
22
?
*
?)?(
11
?)?(
22
?
*
?
*
22 vy
uxv
g
xu
g
x
g
xv
g
yu
g
y
g
y
g
gAC
∂∂
+∂∂
+
−+
−
−
?? ??)?(11
?)?(
22
?
*
?)?(
11
?)?(
22
?
*
?
*
22 vy
uxv
g
xu
g
x
g
xv
g
yu
g
y
g
y
g
g (3.14)
Al desarrollar la expresión 3.14 y sustituir algunos parámetros métricos por los corres-pondientes elementos del tensor métrico covariante, ecs 2.14, se llega a
( ) +
∂∂
+∂∂
+=?? ??
*
22)?(
)12()?(
vy
ux
gg
vguAC
( )
∂∂
+∂∂
+?? ??
*
2211)?(
)12()?(
vy
ux
ggg
ugv (3.15)
donde
2gg
gg ?cos
2211
12)?()?()12( =−
=⋅= ee
Se hace notar que θ2 es el ángulo entre los vectores base locales e(?) y e(?).

28
Para facilitar la explicación de la deducción de los términos que forman la aceleración convectiva en coordenadas curvilíneas, a continuación, se trabaja primero con los términos de las derivadas parciales con respecto a ξ de la ec 3.15, y más tarde, con los términos de las derivadas parciales con respecto a η de la misma ecuación.
Los términos de las derivadas parciales con respecto a ξ de la ec 3.15, se expresan con las ecs 3.5 como sigue:
−
∂∂
=∂∂
)?(11
?)?(
22
??? ??
vg
yu
g
yx
ux (3.16a)
+−
∂∂
=∂∂
)?(11
?)?(
22
??? ??
vg
xu
g
xy
vy (3.16b)
Al desarrollar primero cada una de las derivadas, después de sustituir algunos de los elementos del tensor métrico covariante y factorizar, se llega a que
+
∂∂
−∂∂
+∂
∂=
∂∂
+∂∂
)?(22
??
22
??
*
22)?(
*
22??
*
22
?????u
g
xy
g
yx
ggu
g
gvy
ux
gg
)?(11
??
11
??
*
22
??v
g
yx
g
xy
gg
∂∂
−∂∂
(3.17)
Se puede demostrar que para la expresión anterior se cumple que
222
12*
22
22
??
22
??
*
22
?1
??g
gg
g
g
xy
g
yx
gg
∂∂
−Γ=
∂∂
−∂∂
(3.18a)
y
112
11*
22
11
??
11
??
*
22
??Γ=
∂∂
−∂∂
ggg
g
yx
g
xy
gg
(3.18b)
donde
[ ]??????2
12 xyyx −=Γ y [ ]??????112 xyyx −=Γ
forman parte del conjunto de los llamados símbolos de Schwarz–Christoffel de segunda especie (véase Warsi, 1981).

29
Al sustituir las expresiones 3.18 en 3.17, se obtiene
)?(112
11*
22)?(22
*
212
*
22)?(
*
22??
*
22
?1
???v
ggg
uggg
gu
g
gvy
ux
gg
Γ−
∂∂
−Γ+∂
∂=
∂∂
+∂∂
(3.19)
Procediendo de manera similar, las derivadas de los componentes rectangulares con respecto a η (ec 3.15), se escriben como
−
∂∂
=∂∂
)?(11
?)?(
22
??? ??
vg
yu
g
yx
ux (3.20a)
+−
∂∂
=∂∂
)?(11
?)?(
22
??? ??
vg
xu
g
xy
vy (3.20b)
Nuevamente, al desarrollar las derivadas de las ecs 3.20 y factorizar se obtiene
+
∂∂
−∂∂
+∂
∂=
∂∂
+∂∂
)?(22
??
22
??
*
2211)?(
*
11??
*
2211
?????u
g
xy
g
yx
g
ggu
g
gvy
ux
g
gg
)?(11
??
11
??
*
2211
??v
g
yx
g
xy
g
gg
∂∂
−∂∂
(3.21)
Se puede demostrar que para la expresión 3.21 se cumple que
∂∂
−Γ=
∂∂
−∂∂
2222
222
*
11
22
??
22
??
*
2211
?1
??g
gg
g
g
xy
g
yx
g
gg (3.22a)
y
212
*
22
11
??
11
??
*
2211
??Γ−=
∂∂
−∂∂
g
g
g
yx
g
xy
g
gg (3.22b)
donde
[ ]??????222 xyyx −=Γ y [ ]??????
112 xyyx −=Γ
también forman parte del conjunto de expresiones conocidas como los símbolos de Schwarz–Christoffel. Así, al sustituir las expresiones 3.22 en 3.21, se obtiene que

30
+
∂∂
−Γ+∂
∂=
∂∂
+∂∂
)?(2222
222
*
11)?(
*
11??
*
2211
?1
???ug
gg
gu
g
gvy
ux
g
gg
)?(2
12*
22 vg
gΓ− (3.23)
Finalmente, los términos que forman la aceleración convectiva en coordenadas curvilíneas se obtienen al sustituir las expresiones 3.19 y 3.23 en 3.15, de donde
( ) +
Γ−
∂∂
−Γ+∂
∂+= )?(
112
11
22)?(
22
22
212
)?(
*
22)?(
)12()?( ?
1?
vg
gu
g
g
u
g
gvguAC
( )
Γ−
∂∂
−Γ+∂
∂++ )?(
212
11
22)?(
22
22
222
)?(
*
11)?(
)12()?( ?
1?
vg
gu
g
g
u
g
gugv (3.24)
Los símbolos de Christoffel de segunda especie toman en cuenta que los vectores base contravariantes unitarios cambian de dirección a lo largo de los ejes curvilíneos. Estos términos dependen de la geometría de la malla y son independientes de las variables hidrodinámicas; por tanto, sus valores permanecen constantes mientras las coordenadas del sistema curvilíneo permanezcan fijas. En estos términos se incluye el efecto de la curvatura de la malla.
Gradiente hidráulico
Con base en la regla de la cadena, los términos del gradiente hidráulico en las direcciones de los vectores ex y ey se definen respectivamente como
∂∂
−∂∂
∂∂
H
y H
y gg
= X H
g = GHX?? ??
*
(3.25a)
∂∂
∂∂
−∂∂
H
x+ H
x gg
= Y H
g = GHY?? ??
*
(3.25b)
El gradiente hidráulico en la dirección normal al eje ? constante se expresa como (ec 3.4a)
GHYyg
g GHXx
g
g = GH ?
22?
22 + (3.26)

31
Al sustituir 3.25 en 3.26, se obtiene
?*
22??
*?
*
22??
* ????y
g
g
Hx
Hx
g
g x
g
g
Hy
Hy
g
g = GH
∂∂
+∂∂
−+
∂∂
−∂∂
(3.27)
Al desarrollar y agrupar términos en la expresión anterior, se obtiene
H
yxH
yxH
yxH
yx gg
g = GH
∂∂
+∂∂
−∂∂
−∂∂
???? ????????*
22 (3.28)
Al tomar como factores comunes a los términos de las derivadas parciales, la expresión anterior se reduce a
H
yxyx gg
g = GH
∂∂
−?
)( ????*
22 (3.29)
de donde
?*
22
∂∂H
g
g g= GH (3.30)
Resistencia al flujo
El efecto de la fricción en las direcciones de los vectores ex y ey se expresa respectivamente de la manera siguiente
|V|hu
C
g = SFX
2 (3.31a)
|V|hv
C
g = SFY
2 (3.31b)
donde
2)?()?()?(
)12(2)?(
22 2 vvuguvuV ++=+=
La resistencia al flujo en la dirección normal al eje curvilíneo ? se obtiene como sigue
SFYyg
g SFXx
g
g= SF ?
*
22?
*
22 + (3.32)

32
Nuevamente, al sustituir las expresiones 3.31 en 3.32, se tiene
|V|hv
Cg
yg
g |V|
hu
Cg
xg
g = SF
22 ?
*
22?
*
22 + (3.33)
Al sustituir 3.5 en 3.33 se obtiene
+
−+
− )?(
11
?)?(
22
??
*
22)?(
11
?)?(
22
??
*
22 11v
g
xu
g
xy|V|
hC
g
g
g v
g
yu
g
yx |V|
hC
gg
g = SF
22
Después de desarrollar y factorizar, de la expresión anterior se obtiene
+−− )?(
11
22
*
??)?(
*
??)?(
11
22
*
??)?(??
1v
g
g
g
yxu
g
yxv
g
g
g
yxuyx |V|
hC
g = SF
2 (3.34)
Al reducir términos semejantes se llega a
)(1
????*
)?( yxyxg
u|V|
h
C
g = SF
2− (3.35)
con base en las ecs 2.1 y 2.14 la expresión anterior se simplifica como
V h
u
Cg
= SF )?(
2 (3.36)
Términos de turbulencia
Los componentes que toman en cuenta el efecto de la turbulencia en las direcciones de los vectores ex y ey son respectivamente
∂
∂∂
∂Y Th
+ X Th
h1-
= TURX xyxx
? (3.37a)
∂
∂∂
∂Y Th
+ X Th
h1-
= TURY yyxy
? (3.37b)
El efecto de la turbulencia en la dirección normal al eje curvilíneo ? constante se expresa como

33
TURYyg
gTURXx
g
gTUR ?
*
22?
*
22 += (3.38)
Al sustituir las expresiones 3.37 en 3.38 se obtiene
∂
∂+
∂
∂−+
∂
∂+
∂∂−
=Y
hT
X
hT
hy
g
gY
hT
XhT
hx
g
gTUR yyxyxyxx
?1
?1
?*
22?
*
22 (3.39)
Al aplicar la regla de la cadena en la expresión 3.39, y después de ordenar términos, se obtiene que el efecto de la turbulencia en la dirección normal a ? constante se expresa como sigue
( )
+ hT
g
xxyy +
hTy
hTy
g
x
g
g
h1-
= TUR xyxxxx
∂
∂−
∂
∂−
∂∂
?
)(
??? *
??????
*
?
*
22
( )
hT
xhT
xg
y
hTg
yx
g
g
h1-
yyyyxy
∂
∂+
∂
∂−+
∂
∂−
???
)(
? ??*
?
*
2?
2?
*
22 (3.40)
El esfuerzo Txx se expresa con base en la regla de la cadena como
∂∂
−∂∂
=∂∂
????2??
*
?
*
?t
ug
yug
y
X u
2 = T txx (3.41)
Al sustituir el componente u por sus componentes en coordenadas curvilíneas se tiene
−
∂∂
−
−
∂∂
= )?(11
?)?(
22
?
*
?)?(
11
?)?(
22
?
*
?
???2
???2 v
g
yu
g
y
g
yv
g
yu
g
y
g
yT ttxx (3.42)
Procediendo de manera similar con los otros esfuerzos, Txy y Tyy, se llega a las expresiones siguientes:
+
−
∂∂
−
∂∂
− )?(11
?)?(
22
?
*
?)?(
11
?)?(
22
?
*
?t ?
???
?? vg
yu
g
y
g
x+v
g
yu
g
y
g
x = T txy
−
−
∂∂
−
+
−
∂∂
+ )?(11
?)?(
22
?
*
?)?(
11
?)?(
22
?
*
?t ?
???
?? vg
xu
g
x
g
yv
g
xu
g
x
g
y t (3.43)

34
+
−
∂∂
+
+
−
∂∂
−= )?(11
?)?(
22
?
*
?)?(
11
?)?(
22
?
*
?t ?
??2?
??2 vg
xu
g
x
g
xv
g
xu
g
x
g
xT tyy (3.44)
Estos son todos lo términos trasformados que forman la ecuación dinámica en la dirección normal al eje curvilíneo ? constante.
Conviene aclarar que la versión de las ecuaciones de hidrodinámica en coordenadas curvilíneas que se deduce en este trabajo es parecida a la usada por Borthwick y Akponasa (1997), aunque ellos la llaman versión contravariante. Los autores del presente trabajo consideran que esta versión debe ser llamada covariante física, puesto que, como se demostró en el cap 2, los componentes que acompañan a los vectores base contravariantes unitarios reciben el nombre de componentes covariantes físicos. Esta confusión de nomenclatura aparece en muchos otros artículos técnicos sobre el tema.
De manera similar, se obtienen todos los términos que forman la ecuación dinámica en la dirección normal al eje curvilíneo ? constante. Ambas expresiones se escriben a continuación.
3.3.2 Resumen de las ecuaciones dinámicas en coordenadas curvilíneas generales con componentes físicos
Ecuación dinámica en la dirección normal al eje curvilíneo ξ constante
( ) +
Γ−
∂∂
−Γ+∂
∂++
∂
∂)?(
112
11
22)?(
22
22
212
)?(
*
22)?(
)12()?(
)?(
?1
?v
g
gu
g
g
u
g
gvgu
t
u
( ) +
Γ−
∂∂
−Γ+∂
∂++ )?(
212
11
22)?(
22
22
222
)?(
*
11)?(
)12()?( ?
1?
vg
gu
g
g
u
g
gugv
+∂∂
+?*
22 H
g
g g +++ 2
)?()?()?()12(2
)?()?(
22 vvugu
h
u
Cg
( )
+ hT
g
xxyy +
hTy
hTy
g
x
g
g
h1-
xyxxxx
∂
∂−
∂
∂−
∂∂
+?
)(
??? *
??????
*
?
*
22

35
( )
hT
xhT
xg
y
hTg
yx
g
g
h1-
yyyyxy
∂
∂+
∂
∂−+
∂
∂−+
???
)(
? ??*
?
*
2?
2?
*
22 (3.45)
Ecuación dinámica en la dirección normal al eje curvilíneo η constante
( ) +
Γ−
∂∂
−Γ+∂
∂++
∂
∂)?(
212
22
11)?(
11
11
111
)?(
*
22)?(
)12()?(
)?(
?1
?u
g
gv
g
g
v
g
gvgu
t
v
( ) +
Γ−
∂∂
−Γ+∂
∂++ )?(
122
22
11)?(
11
11
212
)?(
*
11)?(
)12()?( ?
1?
ug
gv
g
g
v
g
gugv
+∂∂
+?*
11 H
g
g g +++ 2
)?()?()?()12(2
)?()?(
22 vvugu
h
v
Cg
( )
+ hT
g
xxyy +
hTy
hTy
g
x
g
g
h1-
xyxxxx
∂
∂−
∂
∂+
∂∂
+?
)(
??? *
?????
*
?
*
11η
( )
hT
xhT
xg
y
hTg
yx
g
g
h1-
yyyyxy
∂
∂−
∂
∂+
∂
∂−+
???
)(
? ??*
?
*
2?
2?
*
11 (3.46)
3.3.3 Ecuación de continuidad en coordenadas curvilíneas
La forma conservativa de las derivadas parciales de una función f(X, Y) se expresa como sigue:
∂∂
−∂∂
∂∂
)(?
)(? ??
*
fy
fy
g1
= X f
(3.47a)
∂∂
∂∂
−∂∂
)(?
)(?
??
*
fx
+ fx
g1
= Y f
(3.47b)
Al aplicar las ecs 3.47 a la versión rectangular de la ecuación de continuidad, ec 3.1, resulta
0)(?
)(?
1)(
?)(
?1
??*
??*
=
∂∂
+∂∂
−+
∂∂
−∂∂
+∂∂
hvxhvxg
huyhuygt
H (3.48)

36
Si se aplica la propiedad asociativa a la suma de los operadores de las derivadas parciales en esta ecuación, se tiene
0 = h v x+hu yg1
h v xhu yg1
+ tH
)(?
)(?
??*
??*
−∂∂
−∂∂
∂∂
(3.49)
Al sustituir los componentes rectangulares del vector velocidad por sus correspondientes componentes covariantes físicos, se obtiene
+
+
−−
−
∂∂
+∂∂
)?(11
?)?(
22
??)?(
11
?)?(
22
??
*?
1v
g
xu
g
xhxv
g
yu
g
yhy
gtH
0?
1)?(
11
?)?(
22
??)?(
11
?)?(
22
??
*
=
+
−+
−−
∂∂
+ vg
xu
g
xhxv
g
yu
g
yhy
g (3.50)
Esta última expresión se factoriza como se muestra a continuación:
+
+−
+
∂∂
+∂∂
)?(11
????)?(
22
2?
2?
* ?1
hvg
yyxxhu
g
yx
gtH
0?
1)?(
22
????)?(
11
2?
2?
*
=
+−
+
∂∂
+ hug
yyxxhv
g
yx
g (3.51)
Con base en las igualdades 2.14, la ec 3.51 se escribe como
+
−
∂∂
+∂∂
)?(11
12)?(
22
22
* ?1
hvg
ghu
gg
gtH
0?
1)?(
22
12)?(
11
11
*
=
−
∂∂
hugg
hvgg
g (3.52)
o bien
0?
1?
1)?(
2211
12)?(11
*)?(
2211
12)?(22
*
=
−
∂∂
+
−
∂∂
+∂∂
hugg
ghvg
ghv
gg
ghug
gtH
Finalmente, al sustituir la ec 3.11 en esta última expresión, se obtiene la versión diferencial, en coordenadas curvilíneas con componentes covariantes físicos, de la ecuación de continuidad

37
( )[ ] ( )[ ] 0?
1?
1)?(
)12()?(11
*
)?()12(
)?(22
*
=+∂∂++
∂∂+
∂∂ hughvg
ghvghug
gtH (3.53)
Los términos donde está como factor )12(g , son el complemento del flujo neto en la dirección normal a los ejes curvilíneos no ortogonales. En caso de que las coordenadas fueran ortogonales, el término )12(g es nulo.
3.4 Modelos de turbulencia
La mayoría de los flujos a superficie libre son turbulentos; esto se distingue por la presencia de remolinos causados por paredes, obstáculos dentro del flujo o cambios de dirección en las fronteras que definen el escurrimiento. Este fenómeno complejo se considera en el modelo numérico al incluir los esfuerzos efectivos o de turbulencia que están en las ecuaciones dinámicas. Dichos esfuerzos dependen de la llamada viscosidad turbulenta, vt. Existen varios modelos para calcular dicha va riable.
Modelo de orden cero
Consiste en calcular la viscosidad turbulenta con la expresión
U h C = ? *tt (3.54)
donde U* es la llamada velocidad de fricción, la cual se puede expresar como
| V | Cg
= U* (3.55)
En la bibliografía se reportan valores para el coeficiente empírico, Ct, de la ec 3.54. Tingsanchali y Maheswaran (1990) utilizan Ct = 0.0765; Duc et al (1996) usan Ct = 0.07; Hu y Kot (1997) y Yulistiyanto et al (1998) proponen Ct = 0.1. En este trabajo, se usa Ct = 0.0765.
El apéndice C incluye la trasformación del modelo de turbulencia k-e, de coordenadas rectangulares a curvilíneas generales, con componentes covariantes físicos.
3.5 Condiciones de frontera y datos iniciales
En Abbott y Cunge (1982) se explica con detalle que los modelos de flujo 2DH, en régimen subcrítico, requieren para su solución información de dos variables en las fronteras del dominio. En general, las fronteras son abiertas o cerradas: en las abiertas

38
se puede dar información del nivel del agua o la velocidad del flujo; para el primero de estos casos se requiere información adicional sobre al menos uno de los componentes de la velocidad; en el otro, es suficiente con dar los dos componentes de la velocidad.
En las fronteras cerradas (paredes), la información de las dos variables es que el flujo normal a la pared es nulo, y como hipótesis es común suponer que el otro componente es tangente a la pared.
En cuanto a los datos iniciales, dado que se tienen tres ecuaciones diferenciales parciales, se requiere información de tres variables independientes en cada punto de la malla de cálculo; éstos son la cota del agua o el tirante, y los dos componentes del vector velocidad.

39
4. ESQUEMA DE DIFERENCIAS FINITAS
Entre los distintos esquemas de diferencias finitas que se han publicado en los últimos años, destaca el propuesto por MacCormack, el cual ha sido usado ampliamente en dinámica y mecánica de fluidos para la solución de ecuaciones diferenciales parciales no lineales, y también en el cálculo del campo de velocidades en flujos a superficie libre: García y Kahawita (1986) muestran el cálculo del flujo bidimensional horizontal en coordenadas rectangulares; Fennema y Chaudhry (1990) modelan el fenómeno del salto hidráulico, donde se tienen simultáneamente regímenes de flujo subcrítico y supercrítico; García-Navarro y Saviron (1992) calculan el movimiento de un frente de onda; Yulistiyanto et al (1998) resuelven la versión conservativa de las ecuaciones de hidrodiná-mica en coordenadas rectangulares para modelar el flujo bidimensional horizontal a superficie libre alrededor de una pila, etc.
El esquema de MacCormack es explícito, de segundo orden en el espacio, y consta de dos etapas (tipo predictor–corrector): en la fase de predicción se calculan las variables dependientes (llamadas variables predichas) con diferencias espaciales hacia atrás, y en la fase de corrección se obtienen las variables dependientes (llamadas variables corregidas) con diferencias espaciales hacia adelante, en función de las variables calculadas en la etapa de predicción. Los valores de las variables dependientes al final del intervalo de tiempo se obtienen en función de los valores de las variables al inicio del intervalo de tiempo y de las variables obtenidas en la fase de corrección.
En varias referencias (véase, por ejemplo, García y Kahawita, 1986), se indica que se obtienen mejores resultados con este esquema, cuando se alterna el cálculo de las diferencias en cada etapa de cálculo, es decir, en un paso de tiempo se calcula la etapa de predicción con diferencias hacia atrás y la etapa de corrección con diferencias hacia

40
adelante, y en el siguiente paso de tiempo, la etapa de predicción se calcula con diferencias hacia adelante y la etapa de corrección con diferencias hacia atrás.
Sea el plano computacional mostrado en la fig 4.1, donde se incluye una malla de cálculo de M celdas en la dirección del eje ? y N celdas en la del eje ?. En la misma figura se indica que las celdas del lado izquierdo definen una frontera abierta donde se conoce el gasto que ingresa y en las celdas del lado derecho se conoce el nivel del agua, mientras que en la parte superior e inferior del plano computacional se tienen fronteras sólidas, llamadas también cerradas. Para aplicar el esquema de MacCormack, se propone que todas las variables dependientes sean calculadas en el centro de las celdas como se muestra en la fig 4.1. Esto tiene la ventaja de que se requiere menor número de parámetros métricos en las ecuaciones discretizadas.
4.1 Metodología de cálculo
a) En un tiempo inicial, k ?t, se conocen los valores de las variables (Hk, u (?)k, v(?)
k)i,j en el punto central (i, j) de cada una de las celdas.
Fase de predicción
b) Se calculan las variables dependientes de la etapa de predicción, (Hp, u (?)p, v(?)
p)i,j con diferencias finitas hacia atrás para 2 ≤ i ≤ M, y 2 ≤ j ≤ N.
c) Con base en la hipótesis de la frontera reflejante, la cual se explica posteriormente, se calculan las variables predichas para j = 1, y 2 ≤ i ≤ M.
Fase de corrección
d) Se calculan las variables dependientes de la fase de corrección (Hc, u (?)c, v(?)
c)i,j, en cada una de las celdas 2 ≤ i ≤ M-1, y 1 ≤ j ≤ N-1, con diferencias finitas hacia delante y en función de los valores de las variables obtenidas en la etapa de predicción.
e) También con base en la hipótesis de frontera reflejante, se calculan los valores de las variables de la fase de corrección para j = N, y 2 ≤ i ≤ M-1.
Valores para la etapa de tiempo (k+1) ? t
f) Hasta aquí se tienen tanto los valores predichos como los corregidos para las celdas comprendidas entre 2 ≤ i ≤ M-1 y 1 ≤ j ≤ N. Con esos valores, se calculan las variables

41
dependientes al final del intervalo de tiempo para esas celdas, en función de los valores de las variables iniciales y corregidas como sigue:
η
i-1 i i+1 i M=
j
j+1
j N=
C
B
D
A
Fig 4.1 Malla de cálculo en el plano computacional
v( )η i j,
u( )ξ i j,
Hi j,
D
B
A
CD g 11 C
AB g 22
j-1
Frontera cerrada
H k+1Q
k+1
Frontera cerrada

42
)(21
,,1
,c
jik
jik
ji HHH +=+ (4.1a)
)(ji,)?()?()?( u + u
21
= u ck1+kji,ji,
(4.1b)
)( ??? v + v21
= v c)(
k)(
1+k)( ji,ji,ji,
(4.1c)
Efecto de las fronteras abiertas
g) Se resuelven las celdas, para i = 1 e i = M, que definen las fronteras donde se conoce la velocidad del flujo o el nivel de la superficie libre del agua, con el procedimiento que se explica posteriormente.
h) Una vez que se tienen los valores de las variables dependientes para cada una de las celdas del plano computacional, los valores de las variables dependientes para el tiempo (k+1) ?t, se toman como valores iniciales y se repite el procedimiento de cálculo, pero ahora calculando primero la fase de predicción con diferencias finitas hacia adelante y la fase de corrección con diferencias hacia atrás.
La solución del campo de velocidades para un flujo con régimen permanente se obtiene cuando, durante el ciclo iterativo, las variables dependientes no cambian significativamente de una iteración a otra.
4.2 Discretización de las ecuaciones
Etapa de predicción con diferencias finitas hacia atrás
Cada uno de los términos que forman la ecuación de continuidad en coordenadas curvilíneas con componentes físicos, ec 3.53, se escribe de la manera siguiente
t
HH
tH
kji
pji
∆
−=
∂∂ ,, (4.2a)

43
])()[(1
)]([?
1,1)(22.)?(22
,*)?(
)12()?(22
*
kji
kji
ji
hughugg
hvghugg
−−=+∂∂
ξ
[ ] hvgg hvggg
kj1,-i
kji,
ji,
)()(1
)?()12(
22)?()12(
22*
−+ (4.2b)
[ ] [ ] uhg uhgg
hug hvg g
kji)(
kji)(
ji,
+−=+∂∂
−1,?11,?11*
)?()12(
)?(11*
)()(1
)(?
1
[ ] hvgg hvggg
kji,
kji,
ji,
)()(1
1)?(12
11)?()12(
11*
−−+ (4.2c)
Se recuerda que ?? y ?? tienen valores unitarios (véase el plano computacional de la fig 4.1). Al sustituir cada una de las expresiones 4.2 en la ecuación de continuidad 3.53, y despejar la variable p
jiH , , se obtiene
[ ]+−∆
− − hug hugg
t H = H
kji)(22
kji)(22
ji,
kji,
pji, ,1?,?
*
)()(
[ ]+−∆
− hvg hvgg
t k
j1,-ik
ji,ji,
)()( )?(12
)?()12(
*
[ ]+∆− −
kji)(11
kji)(11
ji,
hvg - hvgg
t 1.?,?
*
)()(
[ ]kji
kji
ji,
hug - hugg
t 1,)?(
)12(,)?(
)12(
*
)()( −
∆− (4.3)
Para obtener el componente pjiu ,)?( se debe usar la ecuación dinámica 3.45; sin embargo,
debido a que en dicha expresión hay muchos términos donde se incluyen las mismas derivadas parciales, conviene escribir la ecuación en cuestión como sigue:
0=++++ TURXIPSFXIPGHXIPACXIPALXIP (4.4)
donde ALXIP es la aceleración local, ec 3.10; ACXIP la aceleración convectiva, ec 3.13; GHXIP el gradiente hidráulico, ec 3.30; SFXIP el efecto de la resistencia al flujo, ec 3.36, y en TURXIP se incluye el efecto de la turbulencia, ec 3.38. El valor predicho del componente de la velocidad p
jiu ,)?( en la dirección normal al eje ? constante, se obtiene al expresar cada uno de los sumandos de la ecuación dinámica 4.4 con diferencias finitas hacia atrás:

44
Aceleración local (ec 3.10)
t
uu
t
uALXIP
kji
pji
∆
−=
∂
∂= ,)?(,)?()?( (4.5)
Aceleración convectiva (ec 3.13)
Para estos términos, conviene calcular primero las derivadas parciales de los componentes rectangulares de la velocidad con respecto a las coordenadas curvilíneas dadas por la ec 3.20:
−
∂∂
=
∂∂
= )?(11
?)?(
22
?
??v
g
yu
g
yuDUXI
−
∂∂
=
∂∂
= )?(11
?)?(
22
?
??v
g
yu
g
yuDUETA
y con diferencias finitas:
k
ji
k
ji
k
ji
k
ji
vg
yv
g
yu
g
yu
g
yDUXI
,1
)?(11
?
,
)?(11
?
,1
)?(22
?
,
)?(22
?
−−
+
−
−
= (4.6a)
k
ji
k
ji
k
ji
k
ji
vg
yv
g
yu
g
yu
g
yDUETA
1,
)?(11
?
,
)?(11
?
1,
)?(22
?
,
)?(22
?
−−
+
−
−
= (4.6b)
De manera similar, se obtienen las derivadas parciales del componente rectangular v con respecto a las coordenadas curvilíneas (ec 3.10b):
k
ji
k
ji
k
ji
k
ji
vg
xv
g
xu
g
xu
g
xDVXI
,1
)?(11
?
,
)?(11
?
,1
)?(22
?
,
)?(22
?
−−
−
+
+
−= (4.6c)
k
ji
k
ji
k
ji
k
ji
vg
xv
g
xu
g
xu
g
xDVETA
1,
)?(11
?
,
)?(11
?
1,
)?(22
?
,
)?(22
?
−−
−
+
+
−= (4.6d)
Con base en las expresiones 4.6 y la regla de la cadena, ecs 3.6, se obtienen las expresiones para calcular las derivadas de los componentes rectangulares con respecto a las coorde-nadas rectangulares:

45
DUETAg
yDUXI
g
y
Xu
DUXjiji ,*
?
,*
?
−
=
∂∂
= (4.7a)
DUETAg
xDUXI
g
x
Yu
DUYjiji ,*
?
,*
?
+
−=
∂∂
= (4.7b)
DVETAg
yDVXI
g
y
Xv
DVXjiji ,*
?
,*
?
−
=
∂∂
= (4.7c)
DVETAg
xDVXI
g
x
Yv
DVYjiji ,*
?
,*
?
+
−=
∂∂
= (4.7d)
Ahora, con base en las expresiones 4.7 y 3.11, los componentes rectangulares de la aceleración convectiva se obtienen como
DUYvDUXuACX kji
kji ,, += (4.8a)
DVYvDVXuACY kji
kji ,, += (4.8b)
Finalmente, el componente de la aceleración convectiva en la dirección normal al eje ξ constante se obtiene como (ec 3.13)
ACYyg
gACXx
g
gACXIP
jiji ,
?*
22
,
?*
22
+
= (4.9)
Gradiente hidráulico (ec 3.10)
El término del gradiente hidráulico es
( )kji
kji
ji
HHg
gg
Hg
ggGHXIP ,1,
,*
22
*
22
? −−
=
∂∂
= (4.10)
Resistencia al flujo (ec 3.36)
El término que toma en cuenta la resistencia al flujo es
kji
k
jiji
Vh
u
Cg
Vh
u
Cg
SFXIP ,
,
)?(
2,
)?(
2
== (4.11)

46
donde
2,)?(,)?(,)?(
),(2,)?(
2,
2,, )(2)()()( k
jik
jik
jijik
jik
jik
jikji vvuguvuV ++=+=
Esfuerzos de turbulencia (ec 3.38)
En forma similar a como se escribe en diferencias finitas el término de la aceleración convectiva, para expresar los términos de la turbulencia conviene escribir primero los esfuerzos de turbulencia como sigue
DUXXu
Txx tt ??2??2 =∂∂
= (4.12a)
DVYYv
Tyy tt ??2??2 =∂∂
= (4.12b)
)(???? tt DVXDUYXv
Yu
Txy +=
∂∂
+∂∂
= (4.12c)
donde DUX, DVY, DUY y DVX se calculan con las expresiones 4.7. Con base en estos esfuerzos así calculados, es sencillo obtener los términos siguientes:
∂
∂∂
∂Y Th
+ X Th
1-
= TURX xyxx
?h
donde
?? *
?
*
?
∂∂
−∂
∂=
∂∂ xxxxxx hT
g
yhTg
y
XhT
?? *
?
*
?
∂
∂+
∂
∂−=
∂
∂ xyxyxy hT
g
xhT
g
x
Y
hT
y las derivadas parciales de las expresiones anteriores se expresan como sigue:
( ) ( ) ;? ,1,
kjixx
kjixx
xx hThThT
−−=∂
∂ ( ) ( )k
jixxk
jixxxx hThT
hT1,,? −−=
∂∂
( ) ( ) ;? ,1,
k
jixyk
jixyxy hThT
hT−
−=∂
∂ ( ) ( )k
jixyk
jixyxy hThT
hT,1,? −
−=∂
∂

47
Procediendo de manera similar, se obtiene el término TURY dado por la ec 3.37b
∂
∂∂
∂Y Th
+ X Th
h1-
= TURY yyxy
?
Una vez que se tienen los términos TURX y TURY, se procede a calcular el componente del efecto de la turbulencia como sigue (ec 3.38)
TURYyg
gTURXx
g
gTURXIP
jiji ,
?*
22
,
?*
22
+
=
Con base en cada uno de los términos expresados en diferencias finitas, el componente de la velocidad, p
jiu ,)?( , de la fase de predicción se obtiene como
)(,)?(,)?( TURXIPSFXIPGHXIPACXIPtuu kji
pji +++∆−=
De manera similar se discretiza la ecuación dinámica en la dirección normal al eje curvilíneo ? constante, ec 3.46, de donde se obtiene la variable predicha p
jiv ,)?( .
Etapa de corrección con diferencias finitas hacia adelante
Se calculan las variables dependientes con diferencias finitas hacia adelante, en función de las variables obtenidas en la etapa de predicción; así, de la ec 3.53, se obtiene
[ ]+−∆
−= +p
jip
jiji
pji
cji hughug
g
tHH ,)?(22,1)?(22
,*,, )()(
[ ]+−∆
− + hvg hvgg
t p
ji,p
j,iji,
)()( )?(12
1)?()12(
*
[ ]+∆− +
pji)(11
pji)(11
ji,
hvg - hvgg
t .?1,?
*
)()(
[ ]pji
pji
ji,
hug - hugg
t ,)?(
)12(1,)?(
)12(
*
)()( +
∆−
En forma similar a como se plantea en la ec 4.3, se obtienen de las ecuaciones dinámicas en las direcciones normales a los ejes curvilíneos las variables siguientes
pji
cji vuHFu ,)?()?(1,)?( ),,(= ; p
jic
ji vuHFv ,)?()?(2,)?( ),,(=

48
4.3 Condiciones de frontera
Las expresiones anteriores no se aplican en celdas cuyos lados coinciden con las fronteras que definen la zona en estudio, ya que se carece de valores para el cálculo de las derivadas parciales con el esquema de MacCormack. Para resolver las celdas en cuestión es necesario identificar el tipo de frontera que se tiene. En general, existen dos tipos de frontera que son cerradas (paredes) o abiertas. A continuación, se discuten las expresiones correspondientes para celdas cuyos lados forman parte de una frontera.
4.3.1 Frontera cerrada (pared)
La modelación numérica del flujo bidimensional horizontal requiere la definición adecuada de las condiciones de frontera dadas en las paredes. Existen varios procedimientos para modelar el efecto de una pared en el campo de velocidades; éstos se discuten a continuación.
Una metodología se basa en utilizar la ley universal de distribución de velocidades de Prandtl y von-Kárman, llamada también ley logarítmica o de pared, para obtener la velocidad del flujo muy cerca de la misma. Dado que esta ley es válida para condiciones de flujo uniforme, no se recomienda su empleo en la modelación numérica de flujos con zonas de recirculación o de estancamiento; véase, por ejemplo, Rodi (1980).
Otro procedimiento consiste en aceptar que la velocidad en la pared es nula; sin embargo, se ha hecho notar que para modelar numéricamente la variación de la velocidad en la dirección normal a la pared, se necesita que la malla de cálculo sea demasiado densa en esa zona, lo cual no es recomendable debido al notable incremento en los requerimientos de memoria de máquina y tiempo de proceso de cálculo; por tanto, este método no es práctico (véase, por ejemplo, Versteeg y Malalasekera, 1995).
En este trabajo, se utiliza un procedimiento que ha sido aplicado por Chaudhry (1993) y Yulistiyanto (1998), entre otros. Este método se basa en aceptar las hipótesis de que tanto la variación de la velocidad tangencial a la pared, en el sentido normal a la misma, como la velocidad normal a la pared son nulas. Sea el caso de una celda, donde uno de sus lados forma parte de la frontera que confina la superficie libre del agua, como se muestra en la fig 4.2. Con base en estas hipótesis, se supone que en la frontera hay una imagen de la celda, la cual está definida por puntos ficticios en la pared sólida, como se muestra en la fig 4.2. En la figura se observa que los componentes de la velocidad paralelos a la pared

49
son idénticos y los perpendiculares a la misma tienen signo opuesto. De esta manera, las derivadas parciales en la dirección normal a la pared se expresan como
;0?
,
)?( =
∂
∂
ji
kPu k
j)i,?(,
,
k)?( 2
?vP
Pvji
ji
=
∂
∂
donde Pi,j es un parámetro métrico o el producto de algunos de ellos en la celda i, j.
Esta es la manera como se modelan las fronteras cerradas en el modelo numérico que se desarrolla en este trabajo; además de su sencillez, se considera que representa en forma adecuada el efecto de una frontera cerrada en el flujo, como se observa, por ejemplo, en Chaudhry (1993) y Yulistiyanto (1998).
4.3.2 Frontera abierta con nivel de agua conocido
En cuanto a la modelación de una frontera donde se conoce la variación de la superficie libre del agua en el t iempo y se desea conocer el caudal, se propone calcular el componente de la velocidad en la dirección normal al eje curvilíneo ? constante, con base en el componente de la ecuación dinámica en la misma dirección, y suponer que el otro componente de la velocidad es nulo, como se muestra en la fig 4.3 (véase, por ejemplo, Rahman y Chaudhry, 1995). Con base en esta hipótesis, algunos términos de la ecuación dinámica se cancelan; así, el término convectivo se calcula con las expresiones 4.6 a 4.8 pero las derivadas con respecto a las coordenadas curvilíneas se simplifican como sigue:
u( )ξ
v( )η
v( )η
u( )ξ
Celda ficticia
Fig 4.2 Celda con frontera cerrada
Frontera cerrada

50
k
ji
k
ji
ug
yu
g
yDUXI
,1
)?(22
?
,
)?(22
?
−
−
=
k
ji
k
ji
ug
yu
g
yDUETA
,1
)?(22
?
,
)?(22
?
−
−
=
k
ji
k
ji
ug
xu
g
xDVXI
1,
)?(22
?
,
)?(22
?
−
+
−=
k
ji
k
ji
ug
xu
g
xDVETA
1,
)?(22
?
,
)?(22
?
−
+
−=
Se hace notar que este método se debe aplicar en secciones donde se cumpla que el flujo es prácticamente paralelo al eje ξ, para que de esta manera se satisfaga la hipótesis de que el componente de la velocidad en el sentido trasversal al flujo principal sea nulo.
4.3.3 Frontera abierta con flujo conocido
Cuando el gasto de ingreso (Qk+1) es conocido en una frontera como la mostrada en la fig 4.4 se supone que el flujo en la frontera es normal a la misma, como se indica a continuación.
j+1
j-1
j
i M=
u( ) ξ
H k+1
Fig 4.3 Celda i, j con frontera de nivelH conocido
k+1

51
La cota de la superficie libre del agua se obtiene al aplicar la ecuación de continuidad, donde se supone que el componente v(?) es nulo, de esta manera, para la celda mostrada en la fig 4.4 se tiene la expresión siguiente:
( )[ ]1,1)?(
,*,
1,
++
+ −∆
−= kk
jiji
kji
kji Qhu
g
tHH
La solución del campo de velocidades de un flujo permanente se obtiene cuando los valores de las velocidades y niveles de agua convergen en un cierto valor. Puesto que lo que se obtiene son los componentes covariantes físicos del vector velocidad, para conocer los componentes rectangulares correspondientes se utilizan las expresiones 3.6.
4.4 Filtro numérico y condición de estabilidad
Cualquier esquema de diferencias finitas, como el de MacCormack aquí empleado, puede tener problemas de estabilidad debido a la posible propagación de términos correspon-dientes a los altos componentes de Fourier (véase Abbott, 1979), generados por la aproximación numérica. Para lograr la estabilidad del modelo numérico es común aplicar un filtro (véase, por ejemplo, Borthwick y Akponasa, 1997). En el modelo desarrollado en este trabajo, se aplica el filtro propuesto por Abbott (1979), el cual se ha adaptado para el flujo bidimensional, y consiste en modificar cada una de las variables dependientes en función de los valores vecinos de la misma variable como
j+1
j-1
j
i=1
u( ) ξ
Qk+1
Fig 4.4 Celda i j con frontera de gastoQ conocido
,
k+1

52
1,1,,1,1 +−+− +++= jijijijif ffffR
fjifji Rff a)a41( ,, +−=
donde jif , es la variable que se va a filtrar, a un factor de peso (0 = a = 0.25) y fjif , es
la variable filtrada. Durante la modelación numérica, la frecuencia con que se aplica el proceso de filtrado es del orden de diez veces el paso de tiempo, es decir, cada 10 ∆t. Puesto que el filtro numérico se obtiene con base en el promedio ponderado de las variables de las celdas vecinas, al aplicar la expresión 4.8 a celdas que definen las fronteras, el promedio se hace únicamente con los valores de las celdas vecinas.
Debido a que el esquema que se usa en este trabajo es explícito, el paso de tiempo debe cumplir con la restricción de Courant. En Yulistiyanto (1997) se demuestra con algunas simplificaciones que el esquema de MacCormack es estable cuando se cumple en todos los puntos de la malla la condición siguiente
22
t
11
t
2211
?2?21
ggg
Cv
g
CuCt
LLn
+++
++
<∆
donde Cn es el número de Courant, que debe ser menor a la unidad, y ghCL = . En las aplicaciones del modelo numérico que se describen en el cap 5, se reportan los valores de ∆t utilizados. Se revisó que se cumpliera la restricción de Courant durante todo el proceso de cálculo.

53
5. CALIBRACIÓN Y VERIFICACIÓN DEL MODELO NUMÉRICO
La calibración y verificación del funcionamiento del modelo matemático desarrollado se hizo comparando los resultados del modelo numérico con mediciones de laboratorio en distintos canales. A continuación se describe cada una de las cinco pruebas realizadas.
5.1 Flujo en una curva horizontal
Este experimento permitió verificar el funcionamiento de la versión covariante de las ecuaciones en coordenadas curvilíneas generales y que el modelo cumple con la ley de conservación de masa.
Entre los trabajos experimentales más interesantes en canales con fronteras curvas destacan los realizados por Rozovskii (1957), cuyas mediciones han sido utilizadas por varios investigadores, como por ejemplo Leschziner y Rodi (1979); una parte de dichas mediciones están reportadas en Molls (1992). Dichos experimentos se llevaron a cabo en un canal rectangular con ancho B = 0.80 m, que forma una curva en planta de 180°, con pendiente de plantilla nula, coeficiente de fricción de Chezy reportado de C = 60 m1/2/s, velocidad de entrada al canal U = 0.265 m/s y tirante de 0.06 m, lo cual da un gasto de 0.0123 m3/s. Esta información se proporcionó al modelo numérico desarrollado en este trabajo.
Con base en un generador de mallas desarrollado por Mejía y Berezowsky (1996) se obtuvo la malla de cálculo mostrada en la fig 5.1, la cual consta de 117 x 20 celdas. Se hace notar que el tamaño de las celdas, en la dirección del flujo, cambia en forma gradual en las zonas aguas arriba y aguas abajo de la curva; esto se hizo para lograr mejor resolución en el cálculo del campo de velocidades. El intervalo de tiempo empleado en la modelación fue ? t = 0.005 s. Para la modelación, se asignó al coeficiente de filtrado el valor a = 0.05, el cual se aplicó cada 10 ? t. Debido a que no se reporta el valor del tirante en la salida del canal se propuso un valor constante de 0.058 m. No se consideró el efecto de la turbulencia en los cálculos.

54
Como condiciones iniciales, se supuso un tirante de 0.059 m y ambos componentes de la velocidad nulos; después de 60 s de modelación se observó que el flujo está en régimen establecido. El correspondiente campo horizontal de velocidades se muestra en la fig 5.2. Se destaca que en este caso se verificó una exacta conservación de masa; en algunas celdas el número de Courant llegó a tener valores mayores de 0.30.
En la fig 5.3, se muestran los perfiles medidos y calculados de la distribución trasversal de la velocidad en dos secciones trasversales de la curva, para los ángulos de 37° y 102°. Nótese que tanto la velocidad calculada como la medida son mayores en la parte interior de la curva.
En la fig 5.4, se muestra la comparación de los perfiles de la superficie libre del agua medidos y calculados en las paredes de la curva. Como es de esperarse, en la pared de la curva exterior el nivel del agua aumenta, mientras que en la pared interior de la misma dicho nivel disminuye; además, el perfil trasversal de la superficie libre del agua tiene pendiente distinta a cero, tanto en la entrada como en la salida de la curva.
Con base en los resultados mostrados, los autores consideran que los resultados obtenidos con el modelo numérico son muy buenos, ya que el flujo en la curva tiene efectos tridimensionales, mientras que el modelo que aquí se utiliza se basa en la hipótesis de flujo bidimensional horizontal promediado en la profundidad. Los resultados aquí presentados son muy parecidos a los reportados en la bibliografía; véase, por ejemplo, Molls (1992).

55

56
Fig
5.2
Cam
po h
oriz
onta
l de
velo
cida
des

57
Conviene aclarar que este mismo problema se resolvió con el modelo numérico, pero incluyendo el efecto de la turbulencia. Al comparar los resultados con respecto a los obtenidos sin incluir dicho efecto, se observó que no hay diferencias notables entre ellos, lo cual coincide con Rodi

58
(1980); esto se debe a que en el campo de flujo estudiado no se presentan zonas con recirculación. En el ejemplo siguiente, se muestra la importancia de incluir en la modelación numérica los esfuerzos de turbulencia cuando hay zonas de recirculación.
5.2 Efecto de un espigón en el flujo de un canal rectangular
Este experimento permitió verificar la bondad de la modelación para el caso de un flujo con zona de recirculación. La malla es de forma rectangular con espaciamiento variable.
Rajaratnam y Nwachukwu (1983) realizaron varias series de experimentos y mediciones en un canal horizontal rectangular de 37 m de longitud, 0.915 m de ancho y 0.76 m de profundidad, con sistema de recirculación de agua y una compuerta plana en el extremo final para regular el nivel del agua en el canal. En uno de sus ensayos, el A2, colocaron en la mitad de la longitud del canal una placa de 3 mm de espesor y 0.15 m de longitud, como se muestra en la fig 5.5.
Durante la prueba, el tirante en el canal fue de 0.223 m con velocidad del flujo a la entrada de U = 0.22 m/s. Tingsanchali y Maheswaran (1990) presentan una gráfica adimensional de la distribución del componente horizontal de la velocidad en el sentido longitudinal del canal, para las cinco secciones trasversales mostradas en la fig 5.6; de dicha gráfica se obtuvieron los valores medidos con los cuales se revisó el funcionamiento del modelo numérico desarrollado en este trabajo. La malla de cálculo que se usó se muestra en la fig 5.6, la cual consta de 112 x 43 celdas; para la modelación se usó ? t de 0.001 s, coeficiente de filtrado a = 0.05, el cual se aplicó cada 10 ? t, y coeficiente de fricción de Chezy de 60 m1/2/s. El modelo numérico se aplicó para las tres opciones siguientes: a) sin considerar los términos que incluyen los esfuerzos efectivos

59
turbulentos; b) incluyendo los esfuerzos efectivos, con la viscosidad turbulenta calculada con la expresión 3.54; c) calculando la viscosidad turbulenta con el modelo k-e, el cual se explica con detalle en el apéndice C.
Al comparar los resultados obtenidos de cada una de las opciones con los datos medidos en laboratorio, se observó que la segunda opción da excelentes resultados. En la fig 5.7a se muestra el campo de velocidades obtenido en este caso para condiciones de flujo en régimen permanente; en la fig 5.7b se ilustra una ampliación de la zona de recirculación. En las figs 5.8 y 5.9 se indican los campos de velocidades obtenidos para v t = 0 y v t obtenida con el modelo k-e. En ellas, se observa que cuando no se incluye el efecto de la turbulencia (primera opción), la longitud de la zona de separación es demasiado grande, mientras que cuando se calcula la viscosidad turbulenta con el modelo k-e (tercera opción), dicha zona es demasiado pequeña tanto en longitud como en anchura, lo cual ha sido señalado en varios trabajos publicados; por ejemplo, en Tingsanchali y Maheswaran (1990).
La comparación entre el componente rectangular u de las distribuciones de velocidad medidas y calculadas con la segunda opción del modelo de turbulencia se muestra en la fig 5.10. En esta figura se nota cómo se reproduce de manera adecuada la zona de recirculación generada por el espigón. En algunas de las celdas cercanas al espigón, el número de Courant llegó a 0.35.

60

61

62

63

64
5.3 Obstáculo de forma irregular
Con el propósito de validar el modelo de flujo bidimensional horizontal en coordenadas generales, se propuso colocar un obstáculo de forma irregular en el canal de pendiente variable de la Coordinación de Hidráulica del Instituto de Ingeniería, UNAM, como se indica en la fig 5.11. El canal tiene 30 m de largo, 0.78 m de ancho y 0.8 m de altura, con un sistema para recircular el agua, tanque de carga constante, tres bombas con capacidad para bombear hasta 40 l/s, un vertedor rectangular de cresta afilada con 1.48 m de ancho sin contracciones laterales, y paramento aguas arriba de 2.32 m, un limnímetro para aforar el gasto en dicho vertedor, y una compuerta vertical plana en la salida del mismo para controlar el nivel del agua. Se revisó que la plantilla del tramo del canal donde se ubica el obstáculo estuviera horizontal.
La malla de cálculo correspondiente se muestra en la fig 5.12, donde se puede apreciar que las celdas que forman la malla en la zona cercana al obstáculo son cuadriláteras no ortogonales. La malla está compuesta de 151 x 35 celdas.

65
Prueba 1. Gasto de 0.0146 m3/s
Durante este experimento el tirante del agua se mantuvo constante en 0.17 m medido en una sección a 5 m aguas abajo del obstáculo, mientras que la velocidad media del flujo aguas arriba del obstáculo fue de U = 0.11 m/s. Posteriormente, se procedió a medir la distribución trasversal de la velocidad en ocho secciones, las cuales se indican en la fig 5.13. Las mediciones de la velocidad se hicieron con el ADV Lab. Se aclara que primero se obtuvieron varios perfiles de la distribución vertical de la velocidad, lo que permitió verificar que tal distribución es de tipo logarítmico, y que el valor de la velocidad media en cada vertical se presenta aproximadamente a 0.6 h, medido desde la superficie libre del agua; por ello, después de esta verificación, se midió únicamente la velocidad a 0.6 h, donde dicho valor se tomó como la velocidad media.
Para la modelación numérica se propuso el coeficiente de Chezy C = 60 m1/2/s y ? t = 0.002 s, con coeficiente de filtrado a = 0.05, el cual se aplicó cada 10 ? t. Como condiciones iniciales, se propuso un tirante constante de 0.17 m y los componentes de la velocidad nulos. El coeficiente de viscosidad turbulenta se calculó con la ec 3.54.
En la fig 5.13 se muestra el campo horizontal de velocidades calculado, y en las figs 5.14 y 5.15 se comparan los perfiles medidos y calculados de la distribución trasversal de los componentes rectangulares de la velocidad; los resultados del modelo coinciden bastante bien con los valores medidos del componente u de la velocidad, mientras que para el componente v hay discrepancias en la zona más cercana al obstáculo. Se aclara que también en este caso se observó que cuando no se incluye el efecto de la turbulencia, la zona de separación es demasiado larga, mientras que cuando se incluye la turbulencia con el modelo k-e, dicha longitud es demasiado corta y angosta.
En la fig 5.16 se muestra una secuencia de fotos que se tomaron durante el experimento; se agregó confeti de distintos colores en la superficie libre del agua, aguas arriba del obstáculo, lo que permite apreciar la zona de separación del flujo, y los remolinos que se desprenden del extremo del obstáculo.

66

67

68

69
t = t1
Fig 5.16 Fotos del experimento con Q = 0.0146 m /s3
t = t2
t = t3
t = t4

70
Prueba 2. Gasto de 0.0296 m3/s
Sin modificar las dimensiones ni la ubicación del obstáculo colocado en el canal de pendiente variable, se hizo pasar un flujo con velocidad media U = 0.22 m/s, medida a 1 m aguas arriba del obstáculo, mientras que a 5 m aguas abajo del mismo se mantuvo un tirante de 0.17 m.
Asimismo, se aplicó en este caso el programa incluyendo el efecto de la turbulencia al calcular la viscosidad turbulenta con la ec 3.54. Se utilizó ? t = 0.001 s, con coeficiente de filtrado a = 0.05 para las celdas comprendidas entre 10.06 ≤ X ≤ 10.58 m y a = 0.02 para todas las demás, el cual se aplicó cada 10 ? t, y no se modificó la malla de cálculo.
En la fig 5.17 se muestra la malla de cálculo y en la 5.18 el campo de velocidades calculado con la segunda opción; en las figs 5.19 y 5.20 se muestra la comparación de los perfiles trasversales de los componentes de la velocidad medidos y calculados, como se puede apreciar en las figuras; por otro lado, para este caso los resultados del modelo numérico coinciden bastante bien con los valores medidos.
Conviene aclarar que para este caso, dado que la velocidad del flujo es el doble con respecto al caso inmediato anterior, la turbulencia del flujo es mayor.
Para esta prueba se obtuvo la serie de fotos mostradas en la fig 5.21, donde se aprecia el confeti de distintos colores que permite visualizar la zona de separación y los correspondientes remolinos que se generan en el extremo del obstáculo.

71

72

73

74
t = t1
t = t2
t = t3
t = t4
Fig 5.21 Fotos del experimento con Q = 0.0296 m /s3

75
5.4 Flujo en un canal horizontal con curvatura compuesta
Se decidió hacer una última prueba con el modelo matemático, y aplicarlo a un canal de sección rectangular definido por curvas compuestas, como se indica en la fig 5.22. De esta manera, se muestra el funcionamiento del modelo numérico para el caso de fronteras con alineamiento irregular y curvatura notable, junto con el modelo de turbulencia.
Para dar la forma de las fronteras curvas, se colocaron dos estructuras en el canal de pendiente variable del Instituto de Ingeniería. En este caso la velocidad media aguas arriba de las curvas fue de U = 0.088 m/s, con tirante aguas abajo de 0.149 m y gasto de 0.0103 m3/s. Se midió la velocidad con el ADV Lab; con base en la experiencia del caso 5.3, también se tomó como la velocidad media en la profundidad la medida a una profundidad de 0.6 h. Las mediciones de la distribución trasversal de la velocidad se hicieron en las diez secciones indicadas en la fig 5.22, donde también se incluye la malla de cálculo, la cual consta de 129 x 30 celdas. Para la modelación numérica se usó ? t = 0.002 s, con factor de fricción de Chezy de 60 m1/2/s. Como condiciones iniciales se propuso un tirante constante de 0.17 m y los componentes de la velocidad nulos. El modelo se aplicó primero con v t = 0 y coeficiente de filtrado a = 0.02 cada 10 ? t, y después con v t calculada con la expresión 3.54, con coeficiente de filtrado de 0.05 cada 10 ? t. Al comparar los resultados de estas dos pruebas se observó que no hay diferencias notables entre ellos.
El campo de velocidades se muestra en la fig 5.23. En las figs 5.24 y 5.25 se indican los componentes de la velocidad medidos y calculados en las ocho secciones indicadas en la fig 5.22; con línea discontinua se indican los resultados sin incluir la turbulencia y con línea continua los resultados que incluyen el efecto de la turbulencia. En general, los resultados del modelo son bastante aproximados a los valores medidos, excepto en las secciones para X = 11.55, 11.71 y 11.86 m, donde hay diferencias apreciables en una pequeña zona muy cercana a la margen izquierda del canal. En dicha zona las velocidades del flujo son prácticamente nulas, y se considera que el efecto de la dispersión turbulenta es difícil de reproducir con el modelo de turbulencia que se usa en este caso.

76

77

78

79
6. CONCLUSIONES Y RECOMENDACIONES
Se ha desarrollado un modelo numérico de flujo bidimensional horizontal, para predecir el campo de velocidades en cuerpos de agua con flujo en régimen subcrítico, cuyas fronteras pueden estar definidas por líneas curvas o con orientación distinta a la de los ejes de un sistema de coordenadas rectangulares.
Puesto que la forma de las fronteras que definen los cuerpos de agua de ríos, lagunas y estuarios, es muy irregular, el uso de mallas en coordenadas curvilíneas generale s da mayor versatilidad al modelo numérico desarrollado.
Debido a que se usan sistemas de coordenadas curvilíneas generales, fue necesario aclarar algunos conceptos importantes relacionados con las distintas formas de expresar vectores en dichos sistemas de coordenadas. El uso de tales conceptos ha sido relativamente nuevo en el campo de la ingeniería hidráulica, lo que ha dado lugar a interesantes discusiones de diferentes investigadores sobre la manera más adecuada de utilizar vectores en sistemas de coordenadas generales y a la forma de expresar las ecuaciones de hidrodinámica en coordenadas curvilíneas generales. Por ello, en este trabajo se explican con detalle y sencillez varios conceptos fundamentales de las formas como se expresan los vectores en coordenadas curvilíneas generales, lo cual permite justificar con más claridad la selección de la versión utilizada para expresar las ecuaciones de hidrodinámica en coordenadas curvilíneas generales, así como demostrar con mayor facilidad la deducción de las correspondientes ecuaciones.
El modelo matemático incluye los términos que permiten tomar en cuenta el efecto de la turbulencia para determinar zonas de separación o recirculación del flujo. Con base en los resultados del modelo numérico se deduce que, en aplicaciones semejantes a las aquí descritas, con la expresión 3.54 el funcionamiento del modelo es bastante satisfactorio,

80
y que esta manera de calcular dicha variable es mucho más sencilla que aplicar el modelo de turbulencia k-e.
El esquema de diferencias finitas de MacCormack usado en este trabajo requiere que las variables dependientes y los métricos de la malla se calculen en el centro de cada celda de la malla de cálculo; esto permite reducir notablemente los recursos de memoria de máquina.
La manera de calcular el efecto de las fronteras en el flujo ha presentado siempre complicaciones; en este estudio se utiliza el concepto de frontera reflejante y libre deslizamiento para las fronteras cerradas, lo cual permite modelar ese tipo de fronteras de manera sencilla.
La técnica de filtrado numérico aquí usada es sencilla y se aplica en general, cada diez pasos de tiempo, lo cual es mucho menor en comparación con otros métodos de filtrado, donde se aplica dos veces en cada paso de tiempo y se requiere, en algunos casos, de mayores recursos de memoria de máquina.
Se calibró y verificó el funcionamiento del modelo matemático con cinco series de experimentos de laboratorio.
Con base en la comparación de las mediciones de velocidades en laboratorio con los resultados obtenidos del modelo matemático, se puede decir que el modelo de hidrodinámica en coordenadas curvilíneas generales desarrollado en este estudio funciona muy bien.
Para futuras investigaciones se recomienda generalizar el modelo para poder utilizar por bloques las mallas, cuyas líneas en la unión de dichos bloques tengan curvatura suave en la medida de lo posible; esto es con el fin de representar flujos en ríos con islas y cambios notables en el ancho de la superficie libre del agua, y adecuar el modelo matemático para calcular la hidrodinámica con ese tipo de geometrías. Aunque el esquema de diferencias finitas que se usa aquí produce buenos resultados, convendría probar otro esquema del tipo implícito, para incrementar el tamaño en el paso de tiempo en el modelo.

81
7. RECONOCIMIENTO
Se agradece el financiamiento parcial del CONACYT para realizar esta investigación.
El Ing Ricardo Orozco participó activamente en las mediciones de laboratorio. Se agradece su invaluable pacienc ia y cuidado dedicados.
La sección de dibujo del Instituto de Ingeniería mejoró la presentación de las figuras que se incluyen en este trabajo.

82

83
8. REFERENCIAS
Abbott, M. B. (1979). Computational Hydraulics. Elements of the Theory of Free Surface Flows, Pitman, Londres.
Abbott, M. B. y Basco, D. R. (1989). Computational Fluid Dynamics - An Introduction for Engineers, Longman Scientific & Technical, Harlow, Reino Unido.
Abbott, M. B. y Cunge, J. A. (1982). Engineering Applications of Computational Hydraulics, Pitman, Londres.
Anderson, J. D. Jr. (1995). Computational Fluid Dynamics. The Basics with Applications. McGraw-Hill, Inc., Nueva York.
Benqué, J. P., Cunge, J. A., Feuillet, A. H. y Holly, F. M. Jr. (1982). New Method for Tidal Current Computation, Journal of Waterways Port Coast and Oc. Div., Vol. 108, No. 3, pp. 396 - 417.
Borthwick, A. G. L. y Akponasa, G. A. (1997). Reservoir Flow Prediction by Contravariant Shallow Water Equations, J. of Hydraulic Engineering, Vol. 123, No. 5, pp. 432 - 439.
Borthwick, A. G . L. y Barber, R. W. (1992). River and Reservoir Flow Modelling Using the Transformed Shallow Water Equations, Int. Journal Numer. Methods in Fluids, Vol. 14, No. 12, pp. 1193 - 1217.
Boussinesq, J. V. (1877). Théorie de lécoulement tourbillant, Mem. Prés. Acad. Sci. XXIII, 46, París.
Chaudhry, M. H. (1993). Open Channel Flow. Prentice Hall, Englewood Cliffs, Nueva Jersey.

84
Cruickshank, C. y Zumaya, E. (1974). Simulación matemática del flujo de avenidas sobre llanuras de inundación, Memorias del VI Congreso Latinoamericano de Hidráulica, Colombia.
Cruickshank, C. y Zumaya, E. (1977). Propagación de avenidas, Documentación del Plan Nacional Hidráulico, SARH, No. 8, México.
Cunge, J. A., Holly, F. M. y Verwell, A. 1980. Practical Aspects of Computational River Hydraulics, Pitman Publ. Ltd, Londres.
Dammuller, D. C., Bhallamudi, S. M. y Chaudhry, M. H. (1989). Modeling of Unsteady Flow in Curved Channel, Journal of Hydraulic Engineering, Vol. 115, No. 11, pp. 1479 - 1495.
Daily, J. W. y Harleman, D. R. (1966). Fluid Dynamics. Addison-Wesley Publishing Co., Reading, Mass.
Demirdzic, I., Gosman, A. D., Issa, R. I. y Períc, M. (1987). A Calculation Procedure for Turbulent Flow in Complex Geometries, Computers & Fluids, Vol. 15, No. 3, pp. 251 - 273.
Duc, B. M., Wenka, Th. y Rodi, W. (1996). Depth - Average Numerical Modeling of Flow in Curved Open Channels, Computational Methods in Water Resources XI, Vol. 2, Computational methods in surface flow and transport problems.
Eiseman, P. R. (1980). Geometric Methods in Computational Fluid Dynamics, ICASE Report No 80-11, NASA Langley Research Center, Hampton, Virginia, EUA.
Falconer, R. A. (1976). Mathematical Modelling of Jet-Forced Circulation in Reservoirs and Harbors, Tesis de doctorado, Imperial College, Londres.
Falconer, R. A. (1980). Numerical Modelling of Tidal Circulation in Harbors, Journal of Waterways, Port, Coastal and Ocean Div. Proc. ASCE, Vol. 106, WW1, pp. 31-48.
Farrashkhalvat, M. y Miles, J. P. (1990). Tensor Methods for Engineers and Scientists, Ellis Horwood, Ltd., Chichester, Inglaterra.
Fennema, R. J. y Chaudhry, M. H. (1990). Explicit Methods for 2-D Transient Free - Surface Flows, Journal of Hydraulic Engineering, Vol. 116, No. 8, pp. 1013-1034.

85
Flokstra, C. (1977). The Closure Problem for Depth-Averaged Two-Dimensional Flow. Paper A 106, 17th Int. Assoc. for Hydraulic Res. Congress, Baden-Baden, Alemania, pp. 247 - 256.
García-Navarro, P. y Saviron, J. M. (1992). McCormack's Method for the Numerical Simulation of One-Dimensional Discontinuous Unsteady Open Channel Flow, Journal of Hydraulic Research, Vol. 30, No. 1, pp. 95 - 105.
García, R. y Kahawita, R. A. (1986). Numerical Solution of the Saint-Venant Equations with the MacCormack Finite-Difference Scheme, International Journal for Numerical Methods in Fluids, Vol. 6, pp. 259 - 274.
Hansen, W. (1962). Hydrodynamical Methods Applied to Oceanographic Problems, Proc. of the Symp. on Mathematical-Hydrodynamical Methods of Physical Oceanography, Institute für Meereskunde Der Universitat Hamburg.
Hinze, J. O. (1959). Turbulence. An Introduction to its Mechanism and Theory, McGraw-Hill, Inc., Nueva York.
Hu, S. y Kot, S. C. (1997). Numerical Model of Tides in Pearl River Estuary with Moving Boundary, Journal of Hydraulic Engineering, Vol. 123, No. 1, pp. 21 - 29.
Jiménez, A. A. (2000). Cálculo del flujo bidimensional horizontal con coordenadas curvilíneas generales, Tesis de doctorado, DEPFI, UNAM.
Johnson, B. H. (1980). "VAHM - A Vertically Averaged Hydrodynamic Model Using Boundary Fitted Coordinates, Misc. Paper HL-80-3, US Army Engineer Waterways Experiment Station Hydraulics Laboratory, Vicksburg, MS, EUA.
Kalkwijk, J. P. Y De Vriend, H. J. (1980). Computation of the Flow in Shallow River Bends. Journal of Hydraulic Research. Vol. 18, No. 4, pp. 327 - 340.
Karki, K. C. y Patankar, S. V. (1988). Calculation Procedure for Viscous Incompressible Flows in Complex Geometries, Numerical Heat Transfer, Vol. 14, pp. 295 - 307.
Knupp, P. M. y Steinberg, S. (1993). Fundamentals of Grid Generation, CRC Press, Inc.

86
Kuipers, J. y Vreugdenhil, C. B. (1973). Calculations of Two-dimensional Horizontal Flow, Research Report S163, Part 1, Delft Hydraulics Laboratory, Delft, Países Bajos.
Launder, B. E. y Spalding, D. B. (1974). The numerical computation of turbulent flows, Computational Methods of Appl. Mech. And Engrg., 3, 269-289 pp.
Leendertse, J. J. (1967). Aspects of a Computational Model for Long-period Water-Wave Propagation, RM-5294-PR, The Rand Corporation, Santa Mónica, Cal.
Leschziner, M. A. y Rodi, W. (1979). Calculation of Strongly Curved Open Channel Flow, Journal of the Hydraulics Division, ASCE, Vol. 105, No. 10, pp. 1297 - 1314.
Maza, J. A. y García, F. M. (1984). Hidrodinámica. Bases para hidráulica Fluvial, Series del Instituto de Ingeniería, UNAM, D - 20.
Melaaen, M. C. (1992). Calculation of Fluid Flows with Staggered and Nonstaggered Curvilinear Nonorthogonal Grids - The Theory, Numerical Heat Transfer, Parte B, Vol. 21.
Mejía, M. A. y Berezowsky, M. (1996). Generación numérica de mallas en coordenadas curvilíneas para el cálculo de flujos a superficie libre, Revista Ingeniería Hidráulica en México, Vol. XI, No. 3, sep.-dic., pp 13-24.
Molls, T. R. (1992). A general two-dimensional free-surface flow model for solving the depth-averaged equations using an implicit ADI scheme, Tesis de doctorado, Washington State University. Pullman, EUA.
Molls, T. y Chaudhry, M. H. (1995). Depth Averaged Open-channel Flow Model, Journal of Hydraulic. Engineering, Vol. 121, No. 6, pp. 453 - 465.
Nielsen, P. y Skovgaard, O. (1990). A Scheme for Automatic Generation of Boundary-Fitted Depth - and Depth - Gradient - Dependent Grids in Arbitrary Two - Dimensional Regions, International Journal for Numerical Methods in Fluids, Vol. 10, pp. 741 -752.
Ponce, V. M. y Yabusaki, S. B. (1981). Modeling Circulation in Depth-Averaged Flow, Journal of the Hydraulic Division, ASCE, Vol. 107, No. 11, pp. 1501 - 1518.
Pope, S. B. (1978). The Calculation of Turbulent Recirculating Flows in General

87
Rahman, M. y Chaudhry, M. H. (1995). Simulation of Hydraulic Jump with Grid Adaptation, Journal of Hydraulic Research, Vol. 33, No. 4, pp. 555 - 569.
Rajaratnam, N. y Nwachukwu, B. (1983). "Flow near groin- like structures", Journal of Hydraulic Engineering, ASCE, Vol. 109, No. 3, pp. 463-480.
Rastogi, A. K. y Rodi, W. (1978). Predictions of Heat and Mass Transfer in Open Channels, Journal of Hydraulic Division, ASCE, Vol. 104, No. 3, pp. 397-420.
Reynolds, O. (1895). On the Dynamic Theory of Incompressible Viscous Fluids and the Determination of the Criterion, Philosophical Transaction of the Royal Society of London, Vol.186, Series A, pp. 123-164.
Roache, P. J. (1972). Computational Fluid Dynamics. Hermosa Publishers, Albuquerque, EUA.
Rodi, W. (1980). Turbulence Models and Their Application in Hydraulics – State of the Art, IAHR, Delft, The Netherlands.
Rodi, W., Majumdar, S. y Schonung, B., (1989). Finite Volume Methods for Two-dimensional Incompressible Flows with Complex Boundaries, Comput. Methods Appl. Mech. Eng., Vol. 75, pp. 369 - 392.
Rozovskii, I. L. (1957). Flow of Water in Bends of Open Channels, Israel Program for Scientific Translation, Jerusalén, Israel.
Shankar, N. J., Cheon, H. F. y Chan, C. T. (1997). Boundary Fitted Grid Models for Tidal Motions in Singapore Coastal Waters, Journal of Hydraulic Research, Vol. 35, No. 1.
Tingsanchali, T. y Maheswaran, S. (1990). 2-D Depth-Averaged Flow Computation Near Groyne, Journal of Hydraulic Engineering, ASCE, Vol. 116, No. 1, pp. 71-85.
Thompson, J. F., Warsi, Z. U. A., y Mastin, C. W. (1985). Numerical Grid Generation: Foundations ans Applications. North-Holland, Elsevier New York.
Versteeg, H. K. y Malalasekera, W., (1995), An Introduction to Computational Fluid Dynamics, Longman, Inglaterra.

88
Warsi, Z. U. A. (1981). Tensor and Differential Geometry Applied to Analytic and Numerical Coordinate Generation, MSSU-EIRS 81-1 Mississippi State University.
Warsi, Z. U. A. (1992). Fluid Dynamics. Theoretical and Computational Approaches, CRC Press, EUA.
Weare, T. J. (1976). Finite Element or Finite Difference Methods for the Two-Dimensional Shallow Water Equations?, Computer Methods in Applied Mechanics and Engineering, Vol. 7, No. 3, pp. 351 - 357.
Yulistiyanto, B. (1997). Flow Around a Cylinder Installed in a Fixed-bed Open Channel, Tesis de doctorado, No. 1631, Ecole, Polytechnique Fédérale, Lousana, Suiza.
Yulistiyanto, B., Zech, Y. y Graf, W. H. (1998). Flow Around a Cylinder: Shallow-Water Modeling with Diffusion-dispersion, Journal of Hydraulic Engineering, Vol. 124, No. 4, pp. 419 - 429.

89
APÉNDICE A
En este apéndice se deducen las expresiones mostradas en la tabla 2.1, que corresponden a los vectores base unitarios y sus correspondientes base duales o recíprocas, así como las de los componentes asociados a cada uno de los vectores base.
A.1 Base covariante unitaria
El vector q en función de los vectores base covariantes unitarios y componentes contravariantes físicos se escribe como
)?()?(
)?()?( eeq vu += (A.1)
donde los vectores base covariantes unitarios, e(?) y e(?), se obtienen al dividir los vectores base covariantes, e? y e? dados por las ecs 2.6, entre su magnitud; las magnitudes de los vectores base covariantes son, respectivamente,
)()( ??????? yxyx yxyx eeeeeee +⋅+=⋅=
o sea (véanse las ecs 2.14)
112?
2?? gyx =+=e
y, de manera similar,
222?
2?? gyx =+=e
Así, los vectores base covariantes unitarios son
yxg
y
g
xeee
11
?
11
?)?( += ; yx
g
y
g
xeee
22
?
22
?)?( += (A.2)

90
Nótese que estos vectores base son unitarios y adimensionales.
Las expresiones que relacionan a los componentes rectangulares del vector q con los correspondientes componentes contravariantes físicos, se obtienen al aplicar el producto punto del vector q con los vectores base de las coordenadas rectangulares como sigue:
[ ] xvuu eee ⋅+= )?()?(
)?()?( ; [ ] yvuv eee ⋅+= )?(
)?()?(
)?(
Al sustituir los vectores base covariantes unitarios dados por A.2 en las expresiones anteriores y desarrollarlas, se obtienen
)?(
22
?)?(
11
? vg
xu
g
xu += ; )?(
22
?)?(
11
? vg
yu
g
yv +=
Al arreglar las expresiones anteriores como un sistema de ecuaciones lineales, se despejan los componentes contravariantes físicos
vxg
guy
g
gu ?
*
11?
*
11)?( −= ; vxg
guy
g
gv ?
*
22?
*
22)?( +−= (A.3)
Puesto que los correspondientes vectores base son unitarios y adimensionales, estos componentes tienen unidades idénticas a las de la velocidad, es decir [LT-1].
Los elementos del tensor métrico covariante físico son (véanse las ecs 2.14)
111
11
11
2?
2?
)?()?()11( ==
+=⋅=
gg
g
yxg ee (A.4a)
2211
12
2211
??
2211
??)?()?()12(
ggg
gg
yy
gg
xxg =+=⋅= ee (A.4b)
122
22
22
2?
2?
)?()?()22( ==
+=⋅=
gg
g
yxg ee (A.4c)
En forma similar a como se explicó en el cap 2 de este trabajo, el cuadrado de la magnitud del vector q se obtiene con el producto punto del vector sobre sí mismo, es decir

91
qqq ⋅=2
Al sustituir A.1 en la expresión anterior, desarrollarla y sustituir los elementos del tensor métrico, ecs A.4, se obtiene la expresión siguiente para calcular la magnitud del vector q:
2)?()22(
)?()?()12(
2)?()11( )(2)( vgvugug ++=q (A.5)
Finalmente, el coseno del ángulo ?3 entre los vectores base covariantes unitarios se obtiene del producto punto entre los mismos vectores base, de donde
)?()?(
)?()?(3?cos
ee
ee ⋅=
Al sustituir las ecs A.2 en esta última expresión y desarrollarla, se obtiene
2211
123?cos
gg
g= (A.6)
A.2 Base dual o recíproca de la covariante unitaria
En este caso el vector q se expresa como
??
?? EEq VU += (A.7)
donde E? y E? son los vectores base recíprocos de los vectores base covariantes unitarios e(?) y e(?); esta base dual de vectores se puede expresar como
yx ba eeE +=? ; yx dc eeE +=? (A.8)
donde a, b, c y d representan las expresiones que definen a los correspondientes componentes; éstas se obtienen a partir de las expresiones siguientes
1?)?( =⋅ Ee ; 0?
)?( =⋅ Ee (A.9)
Al sustituir los vectores base covariantes unitarios, ecs A.2, y las expresiones A.8 en A.9, se obtienen respectivamente

92
( ) 111
?
11
? =+⋅
+ yxyx ba
g
y
g
xeeee ; ( ) 0
11
?
11
? =+⋅
+ yxyx dc
g
y
g
xeeee
Al desarrollar las expresiones anteriores se llega, respectivamente, a
11?? gbyax =+ (A.10a); 0?? =+ dycx (A.10b)
Además de las expresiones A.9, también se cumplen las siguientes
1?)?( =⋅ Ee ; 0?
)?( =⋅ Ee (A.11)
Nuevamente, al sustituir las ecs A.2 de los vectores base covariantes unitarios y las expresiones A.8 en A.11, se obtienen
( ) 122
?
22
? =+⋅
+ yxyx dc
g
y
g
xeeee ; ( ) 0
22
?
22
? =+⋅
+ yxyx ba
g
y
g
xeeee
Al desarrollar las expresiones anteriores, se llega a
22?? gdycx =+ (A.12a) 0?? =+ byax (A.12b)
Con base en las expresiones A.10a y A.12b, se obtienen los componentes del vector base E? como sigue:
De la ec A.12b se tiene
bx
ya
η
η−= (A.13)
Al sustituir la expresión anterior en A.10a, se obtiene
11??
?? gbyb
x
yx =+
−
Al despejar b de esta última expresión, resulta
?*
11 xg
gb −= (A.14a)
y al sustituir b en la ec A.13, se obtiene

93
?*
11 yg
ga = (A.14b)
Las expresiones A.14 son los componentes del vector E?, de forma que
yx xg
gy
g
geeE ?
*
11?
*
11 −=ξ (A.15a)
Con base en las expresiones A.10b y A.12a, y un procedimiento similar al anterior, se obtienen los componentes del vector base E?, el cual se escribe como
yx xg
gy
g
geeE ?
*
22?
*
22? +−= (A.15b)
Es importante hacer notar que estos vectores base recíprocos, E? y E?, son adimen-sionales pero no son unitarios.
En cuanto a los componentes U? y V? que acompañan a estos vectores base recíprocos, para obtener sus correspondientes expresiones, primero se aplica el producto punto del vector q, ec A.7, con los vectores base ex y ey, como sigue
( ) xVUu eEE ⋅+= ??
?? ; ( ) yVUv eEE ⋅+= ?
??
? (A.16)
Al sustituir las ecs A.15 en A.16 y desarrollar cada una de las expresiones anteriores, se obtienen respectivamente
??*
22??
*
11 Vyg
gUy
g
gu −= ??
*
22??
*
11 Vxg
gUx
g
gv +−= (A.17)
Al tratar las expresiones A.17 como un sistema lineal de ecuaciones, se obtienen los componentes siguientes:
vg
yu
g
xU
11
?
11
?? += v
g
yu
g
xV
22
?
22
?? += (A.18)
Con los vectores base recíprocos, se obtienen las correspondientes expresiones para calcular los elementos del tensor métrico

94
*
22112?
2?
*
11??11 )(ggg
yxgg
G =+=⋅= EE (A.19a)
*
11222?
2?
*
22??22 )(g
ggyx
gg
G =+=⋅= EE (A.19b)
*
122211????
*
2211??12 )(gg
ggxxyyg
ggG −=+−=⋅= EE (A.19c)
Con base en las expresiones A.7 y A.19, se obtiene la expresión para calcular la magnitud del vector q; para ello se utiliza el producto punto del vector q sobre sí mismo, de manera que al desarrollar el producto punto, se obtiene
222?
12??
112? 2 GVGVUGU ++=q (A.20)
Finalmente, el coseno del ángulo ?4 entre los vectores base recíprocos se obtiene con base en el producto punto de dichos vectores, es decir
4?cos???? EEEE =⋅ (A.21)
puesto que
*
2211?
g
gg=E ;
*
2211?
g
gg=E
y
*
122211????
*
2211?? )(gg
ggyyxxg
gg−=+−=⋅ EE
Al sustituir estas últimas expresiones en A.21, se obtiene que el coseno del ángulo ?4 se expresa como
2211
124?cos
gg
g−= (A.22)

95
A.3 Base contravariante unitaria
Cuando se usan los vectores contravariantes unitarios, el vector q se expresa como
)?()?(
)?()?( eeq vu += (A.23)
donde los vectores base e(?) y e(?) se obtienen al dividir los vectores base contravariantes dados por las ecs 2.19 entre su magnitud; las magnitudes de estos vectores son (ecs 2.14)
*
22
*
2?
2????
g
g
g
xy=
+=⋅= eee
*
11
*
2?
2????
g
g
g
xy=
+=⋅= eee
Con estas expresiones los vectores base contravariantes unitarios son
yxg
x
g
yeee
22
?
22
?)?( −= ; yxg
x
g
yeee
11
?
11
?)?( +−= (A.24)
Las expresiones que relacionan a los componentes rectangulares del vector q con los correspondientes componentes u(?) y v(?), se obtienen al aplicar el producto del vector q con los vectores base del sistema rectangular, es decir
[ ] xvuu eee ⋅+= )?()?(
)?()?( ; [ ] yvuv eee ⋅+= )?(
)?()?(
)?(
Al sustituir los vectores contravariantes unitarios de A.24 en las expresiones anteriores y después de desarrollarlas, se obtienen respectivamente
)?(11
?)?(
22
? vg
yu
g
yu −= ; )?(
11
?)?(
22
? vg
xu
g
xv +−=
Nuevamente, de estas últimas expresiones se despejan los componentes covariantes físicos u(?) y v(?)
vyg
gux
g
gu ?
*
22?
*
22)?( += ; vy
g
gux
g
gv ?
*
11?
*
11? +=)( (A.25)
Se hace notar que estos componentes tienen unidades de velocidad [LT-1].

96
Los elementos del correspondiente tensor métrico contravariante físico son (véanse las ecs 2.14)
122
22
22
2?
2?)?()?()11( ==
+=⋅=
gg
g
xyeeg (A.26a)
2211
12
2211
????)?()?()12(
ggg
gg
xxyyeeg −=
+−=⋅= (A.26b)
111
11
11
2?
2?)?()?()22( ==
+=⋅=
gg
g
xyeeg (A.26c)
Planteando el producto punto de q?q, ec A.23, y con base en las expresiones A.26, se obtiene la expresión siguiente para calcular la magnitud de dicho vector
2?)?()?(
)12(2)?( 2 vvugu ++=q (A.27)
El ángulo ?5 entre los vectores base contravariantes unitarios se obtiene al aplicar el producto punto de los mismos vectores base, de donde
2211
12)?()?(
)?()?(
5?cosgg
g
eeee
−=⋅
= (A.28)
A.4 Base dual o recíproca de la contravariante unitaria
Así como los vectores base covariantes unitarios tienen una base dual, la cual se explicó en el subcap A.2, también los vectores base contravariantes unitarios tienen su correspondiente base dual; el vector q en función de la base dual de la contravariante unitaria se escribe como sigue:
??
?? EEq VU += (A.29)
donde E? y E? son los vectores base recíprocos de los vectores base contravariantes unitarios e(?) y e(?); estos vectores base recíprocos se pueden expresar como
yx nm eeE +=? ; yx sr eeE +=? (A.30)
donde m, n, r y s representan las expresiones que definen a los correspondientes compo-nentes; éstas se obtienen a partir de las expresiones siguientes

97
1?? =⋅ Ee )( ; 0?
? =⋅ Ee )( (A.31)
Al sustituir los vectores base contravariantes unitarios, ecs A.24, y las expresiones A.30 en A.31 se obtienen, respectivamente,
( ) 122
?
22
? =+⋅
− yxyx nm
g
x
g
yeeee ; ( ) 0
22
?
22
? =+⋅
− yxyx sr
g
x
g
yeeee
Al desarrollar las expresiones anteriores, se llega a
22?? gnxmy =− (A.32a); 0?? =− sxry (A.32b)
Además de las expresiones A.31, también se cumplen las expresiones siguientes
1?? =⋅ Ee )( ; 0?
? =⋅ Ee )( (A.33)
Nuevamente, al sustituir las ecs A.24 de los vectores base covariantes unitarios y las expresiones A.30 en A.33, se obtienen respectivamente
( ) 111
?
11
? =+⋅
+− yxyx sr
g
x
g
yeeee ; ( ) 0
11
?
11
? =+⋅
+− yxyx nm
g
x
g
yeeee
Al desarrollar las expresiones anteriores se llega a
11?? gsxry =+− (A.34a); 0?? =+− nxmy (A.34b)
Ahora, con base en las expresiones A.32a y A.34b, se obtienen los componentes del vector base E? como sigue:
De la ec A.34b se tiene
ny
xm
?
?= (A.35)
Al sustituir la expresión anterior en A.32a, se tiene
22??
?? gnxn
y
xy =−
Al despejar n de esta última expresión, se obtiene

98
?*
22 yg
gn = (A.36a)
y al sustituir n en la ec A.35, se obtiene
?*
22 xg
gm = (A.36b)
Las expresiones A.36 son los componentes del vector E?, de forma que
yx yg
gx
g
geeE ?
*
22?
*
22? += (A.37a)
Con base en las expresiones A.32b y A.34a, y un procedimiento similar al anterior, se obtienen los componentes del vector base E?, el cual se escribe como
yx yg
gx
g
geeE ?
*
11?
*
11? += (A.37b)
Conviene hacer notar que esta base de vectores recíprocos también son adimensionales pero no son unitarios.
Los componentes asociados a estos vectores se obtienen igualmente al aplicar el producto punto del vector q con los vectores base de las coordenadas rectangulares, como sigue
[ ] xVUu eEE ⋅+= ??
?? ; [ ] yVUv eEE ⋅+= ?
??
? (A.38)
Al sustituir A.37 en A.38, se obtienen respectivamente
??
*
11??
*
22 Vxg
gUx
g
gu += ; ?
?*
11??
*
22 Vyg
gUy
g
gv += (A.39)
En estas expresiones, se despejan los componentes contravariantes U? y V?, de donde
vg
xu
g
yU
22
?
22
?? −= ; vg
xu
g
yV
11
?
11
?? +−= (A.40)
Los elementos del tensor métrico asociado con los vectores base recíprocos son los siguientes

99
*
11222?
2?
*
22??11 )(
ggg
yxgg
EEG =+=⋅= (A.41a)
*
121122????
*
11222?
2?
*
22??12 )()(
gg
ggyyxxg
ggyx
gg
EEG =+=+=⋅= (A.41b)
*
22112?
2?
*
11??22 )(
ggg
yxgg
EEG =+=⋅= (A.41c)
La magnitud del vector q en función de los vectores base duales y sus correspondientes componentes se obtiene con la expresión siguiente:
2?22
??12
2?11 )(2)( VGVUGUG ++=q (A.42)
Finalmente, el coseno del ángulo entre los vectores base duales se obtiene de
2211
12
??
??6?cos
ggg
=⋅
=EE
EE (A.43)
A.5 Resumen de las versiones de vectores base locales
En los subcapítulos anteriores de este apéndice se ha demostrado cómo obtener, a partir de los vectores base locales covariantes (eξ, eη), los vectores base locales unitarios (e(ξ), e(η)), y de estos últimos, los vectores base locales recíprocos denotados como (Eξ, Eη). La secuencia de cómo han sido obtenidas estas tres bases se indica en la fig A.1.
Por otro lado, en la misma figura, se muestra de manera secuencial cómo se obtienen a partir de los vectores base locales contravariantes (eξ, eη), primero los vectores base contravariantes unitarios (e(ξ), e(η)), y después, los correspondientes vectores base recíprocos (Eξ, Eη).
Conviene hacer notar que al hacer unitarios los vectores base recíprocos (Eξ, Eη), se obtienen los vectores base locales covariantes unitarios (e(ξ), e(η)); de manera similar, los vectores base unitarios de la base recíproca (Eξ, Eη) son los vectores base contravariantes unitarios (e(ξ), e(η)).
Finalmente, con el propósito de evitar confusiones e indicar de forma correcta los nombres de vectores base y componentes covariantes y contravariantes, en la tabla A.1 se muestra cómo se expresan tales vectores base locales y sus correspondientes componentes.

100
Fig A.1 Conjuntos de vectores base locales en coordenadas curvilíneas generales
Duales o recíprocas
Base covariante
ηξ ee ,
Base contravariante
ηξ ee ,
Base covariante unitaria adimensional
)()( , ηξ ee
Base dual o recíproca de ( )()( , ηξ ee ):
ηξ EE ,
Base contravariante unitaria adimensional
)()( , ηξ ee
Base dual o recíproca de ( )()( , ηξ ee ):
ηξ EE ,

101
TABLA A.1 CONJUNTOS DE VECTORES BASE LOCALES Y COMPONENTES QUE LOS ACOMPAÑAN
Sistemas de
coordenadas
Vectores
base
Componentes Comentarios
Rectangular (x,y) yx ee , yx vu , Vectores base unitarios
adimensionales
ηξ ee , ηξ vu , Vectores base locales covariantes y
componentes contravariantes
( ) )(, ηξ ee ( ) ( )ηξ vu , Base local covariante unitaria
adimensional y componentes
contravariantes físicos ηξ EE , ηξ VU , Base recíproca (de )()( , ηξ ee ) y
componentes covariantes duales ηξ ee , ηξ vu , Vectores base locales contravariantes
y componentes covariantes )()( , ηξ ee )()( , ηξ vu Base local contravariante unitaria
adimensional y componentes
covariantes físicos
Coordenadas
curvilíneas
generales
),( ηξ
ηξ EE , ηξ VU , Base recíporoca (de )()( , ηξ ee ) y
componentes contravariantes duales

102

103
APÉNDICE B
El objetivo de este apéndice es mostrar, con ejemplos numéricos, las seis formas en las que se puede expresar un mismo vector cuando se utiliza un sistema de coordenadas curvilíneas generales. Aquí, se definen los ejes del sistema de coordenadas curvilíneas no ortogonales con las parábolas siguientes
LPLPLAKPBRY +−−+−+++−= 2)2()?(4)?( 222 (B.1a)
)?(4 AKYPX −−= (B.1b)
Las ecs B.1 son conocidas como funciones inversas de las funciones directas siguientes
B
R LY + X = 2 −− 2)(
? (B.2a)
A
K 4PX Y
=
2
−−? (B.2b)
donde A = 10, B = 5, K = 20, L = 70, P = -25, R = 40.
En la fig B.1 se muestran el plano rectangular y los ejes curvilíneos para ? = 1 y ? = 1. Se desea expresar el vector q que tiene componentes rectangulares u = 5 m/s y v = 0.5 m/s, cuyo origen se ubica en el punto O (X, Y ) = (15.2674 m, 27.6690 m), con cada una de las seis formas explicadas en este trabajo; asimismo, se calcula la magnitud del vector en función de los correspondientes componentes y elementos de tensor métrico, y el ángulo entre los vectores base.

104
En primer lugar se requiere calcular los valores de las derivadas parciales de las coordenadas rectangulares con respecto a las coordenadas curvilíneas, es decir, los parámetros métricos inversos. Estos valores, para el punto O, con coordenadas curvilíneas ? = 1 y ? = 1 son
m4153.52
? =−=∂∂
=FRAP
?Y
y ; m4369.2)(
? −=+
−=∂∂
=FR
?BRB?Y
y
( ) m0147.152
?? =−=∂∂
= AyXP
?X
x ; m9807.72
?? ==∂∂
= yXP
?X
x
donde 3309.92)2()?(4)?( 222 =−+−+++= LPLAKPBRFR
Con los parámetros métricos inversos, se calcula el determinante del Jacobiano, J, en función de los parámetros métricos inversos, ec 2.1,

105
2???? m8072.79=−= yxyxJ
B.1 Base covariante del vector q
El vector q en función de los vectores base covariantes se expresa con la ec 2.5:
??
?? eeq vu +=
donde los vectores base covariantes se calculan con las ecs 2.6, como sigue:
yx eee y + x = ??? ; yx eee 2.4369- 7.9807 = ? ; m3444.8? =e
yx eee y + x = ??? ; yx eee 5.4153- 15.0147 = ? ; m9614.15? =e
Como se comenta en el cap 2, los vectores base covariantes no son unitarios, pues tienen unidades [L], lo que difiere de los vectores base del sistema rectangular, los cuales son unitarios y adimensionales.
Los correspondientes componentes contravariantes del vector q se calculan con las ecs 2.10:
vJ
xu
J
yu ??? −= ; 1? s2452.0 −=u
vJ
xu
J
yv ??? +−= ; 1? s2027.0 −=v
Nótese que los componentes contravariantes tienen por unidades [T-1].
Los elementos del tensor métrico covariante están dados por las expresiones 2.14:
22?
2?11 m63.69=+= yxg ; 2
????12 m6312.106=+= yyxxg ;
22?
2?22 m7667.254=+= yxg 1221 gg =
Con los valores de los elementos del tensor métrico covariante, se calcula la raíz cuadrada de su correspondiente determinante
22122211* m8072.79=−= gggg

106
Nótese que se cumple la igualdad de que *gJ =
El vector q en función de los vectores base covariantes y componentes contravariantes se escribe como
?? 2027.02452.0 eeq +=
y su magnitud calculada con la ec 2.13 es
( ) ( ) m/s0249.522?
22??
122?
11 =++= vgvugugq
El ángulo ?1 entre los vectores base covariantes se obtiene al aplicar la ec 2.16, de donde
8000.0?cos2211
12
??
??1 ==
⋅=
ggg
ee
ee
así, ?1 = 36.8121°. En la fig B.2 se muestran los vectores base covariantes y los compo-nentes
contravariantes del vector q.

107
B.2 Base contravariante del vector q
El vector q en función de los vectores base contravariantes está dado por la ec 2.17:
??
?? eeq vu +=
donde los vectores base contravariantes se obtienen de las ecs 2.19:
yxg
x
g
yeee
*
?
*
?? −= ; yx eee 1881.00679.0? −= ; 1? m20.0 −=e
yxg
x
g
yeee
*
?
*
?? +−= ; yx eee 100.00305.0? += ; 1? m1045.0 −=e
Tampoco en este caso los vectores base contravariantes son unitarios, pues tienen por unidades [L-1].
Los correspondientes componentes covariantes se calculan con las ecs 2.22
vyuxu ??? += ; /sm6851.38 2? =u
vyuxv ??? += ; /sm7811.77 2? =v
Como se observa, los componentes covariantes tienen unidades de [L2T-1], las cuales son diferentes a las de la velocidad.
Los elementos del tensor métrico contravariante se calculan con las expresiones 2.25
2
*
2211 m04.0 −==gg
g ; 2
*
1122 m0109.0 −==gg
g ; 2
*
1212 m0167.0 −−=−=gg
g
La magnitud del vector q en función de los elementos del tensor métrico contravariante y componentes covariantes se calcula con la expresión 2.24
m/s0249.52 2?
22??
122?
11 =++= vgvugugq
El ángulo ?2 entre los vectores base contravariantes se obtiene de la expresión siguiente
800.0?cos2211
12??
??
2 −=−
=⋅
=gg
g
eeee

108
de donde ?2 = 143.6388°. En la fig B.3 se muestra el vector q en función de los vectores base contravariantes y componentes covariantes.
B.3 Base covariante unitaria
El vector q en función de los vectores base covariantes unitarios y componentes contravariantes físicos se escribe como, ec A.1
)?()?(
)?()?( eeq vu +=
donde los vectores base covariantes unitarios se obtienen con las ecs A.2
yxg
y
g
xeee
11
?
11
?)?( += ; yx eee 2990.09564.0)?( −= ; 1)?( =e
yxg
y
g
xeee
22
?
22
?)?( += ; yx eee 3392.09407.0)?( += ; 1)?( =e

109
Estos vectores base son unitarios y adimensionales. Los valores de los correspondientes componentes contravariantes físicos son, ecs A.3
vxg
guy
g
gu ?
*
11?
*
11)?( −= ; m/s0460.2)?( =u
vxg
guy
g
gv ?
*
22?
*
22)?( +−= ; m/s2350.3)?( =v
Puesto que los correspondientes vectores base son unitarios y adimensionales, los componentes tienen unidades idénticas a los de la velocidad. Así, el vector q en función de los vectores base covariantes unitarios y componentes contravariantes físicos se expresa como sigue
)?()?( 2350.30460.2 eeq +=
Los elementos del correspondiente tensor métrico covariante físico son, ecs A.4
1)?()?()11( =⋅= eeg ; 80.02211
12)?()?()12( ==⋅=
gg
gg ee
1)?()?()22( =⋅= eeg ; )12()21( gg =
Con estos valores y los correspondientes componentes, la magnitud del vector q se obtiene con la expresión A.5
m/s0249.5)(2)( 2)?()22(
)?()?()12(
2)?()11( =++= vgvugugq
El ángulo entre los vectores base covariantes unitarios se obtiene con la expresión A.6
80.0?cos2211
12
??
??3 ==
⋅=
ggg
)()(
)()(
ee
ee
Nótese que este ángulo y el obtenido con los vectores base covariantes son idénticos. En la fig B.4 se muestra el vector q en función de los vectores base covariantes unitarios y componentes contravariantes físicos.

110
B.4 Base dual o recíproca de la covariante unitaria
En este caso el vector q se expresa con la ec A.7
??
?? EEq VU +=
donde los vectores base se calculan con las ecs A.15, de forma que
yx xg
gy
g
geeE ?
*
11?
*
11? −= ; yx eeE 57.12548.0? −−= ; 5890.1? =E
yx xg
gy
g
geeE ?
*
22?
*
22? +−= ; yx eeE 5961.14874.0? += ; 6689.1? =E
Es importante hacer notar que estos vectores base, E? y E?, son adimensionales pero no son unitarios.

111
Los componentes U? y V? se obtienen respectivamente con las ecs A.18
m/s6360.411
?
11
?? =+= v
g
yu
g
xU
m/s8731.422
?
22
?? =+= v
g
yu
g
xV
Los elementos del tensor métrico correspondiente se calculan con las ecs A.19
7852.2*
2211??11 ==⋅=ggg
G EE
7852.2*
2211??22 ==⋅=ggg
G EE
2301.2*
122211
??12 −=−=⋅=gg
ggG EE
Con base en estos valores y los componentes U? y V? se calcula la magnitud del vector q con la ec A.20
m/s0249.52 222?
12??
112? =++= GVGVUGUq
El ángulo entre los vectores base recíprocos se obtiene con la ec A.22
800.0?cos2211
12??
??
−=−=⋅
=gg
g4
EEEE
En la fig B.5 se muestra el vector q en función de los vectores base recíprocos E? y E? y los componentes U? y V?.

112
B.5 Base contravariante unitaria
Cuando se usan los vectores contravariantes unitarios, el vector q se expresa con la ec A.23
)?()?(
)?()?( eeq v+= u
donde los vectores base e(?) y e(?) se obtienen con las ecs A.24
yxyxg
x
g
yeeeee 9407.03393.0
22
?
22
?)?( −=−= ; 1)?( =e
yxyxg
x
g
yeeeee 9497.03393.0
11
?
11
?)?( −=+−= ; 1)?( =e
Los correspondientes componentes covariantes físicos se calculan con las expresiones A.25

113
m/s7370.7?*
22?
*
22)?( =+= vy
g
gux
g
gu
m/s1326.8?*
11?
*
11? =+= vy
g
gux
g
gv )(
Los elementos del tensor métrico contravariante físico se obtienen con las ecs A.26
1)?()?()11( =⋅= eeg ; 1)?()?()22( =⋅= eeg
80.02211
12)?()?()12( −=−=⋅=gg
gg ee
La magnitud del vector se calcula con la ec A.27
m/s0249.5)(2)( 2)?()?()?(122)?( =++= vvuguq
El ángulo entre los vectores base contravariantes unitarios se obtiene a partir de la ec A.28
800.0?cos2211
125 −−=
gg
g
En la fig B.6 se muestra el vector q en función de los vectores base contravariantes unitarios y los correspondientes componentes covariantes físicos.

114
B.6 Base dual de la contravariante unitaria
El vector q en función de los vectores base recíprocos de los contravariantes unitarios se obtiene con la ec A.29
??
?? EEq VU +=
donde la base dual de vectores E? y E? se obtienen con las ecs A.37
yxyx yg
gx
g
geeeeE 4874.05961.1?
*
22?
*
22? −=+= ; 6689.1? =E
yxyx yg
gx
g
geeeeE 5662.057.1?
*
11?
*
11? +=+= ; 6689.1? =E
Los componentes contravariantes correspondientes se calculan con las ecs A.40

115
m/s2260.122
?
22
?? =−= vg
xu
g
yU ; m/s9384.1
11
?
11
?? =+−= vg
xu
g
yV
Los elementos del tensor métrico correspondiente se calculan con las ecs A.41
7852.2*
112211 ==
ggg
G ; 7852.2*
112222 ==
ggg
G ; 2298.2*
12221112 ==
gg
ggG
La magnitud del vector q en función de la base dual de los vectores contravariantes unitarios y los correspondientes componentes se calcula con la ec A.42
m/s0249.5)(2)( 2?22
??12
2?11 =++= VGVUGUGq
El coseno del ángulo ?6 entre los vectores base recíprocos se obtiene de la ec A.43
800.0?cos2211
126 ==
gg
g
En la fig B.7 se muestra el vector q en función de los vectores base recíprocos E? y E?, y los componentes U? y V?.

116

117
APÉNDICE C
El modelo de turbulencia k- e fue propuesto originalmente por Launder y Spalding (1974), y ha sido usado ampliamente para calcular la viscosidad turbulenta en modelos de hidrodinámica que se basan en resolver la versión rectangular de las ecuaciones de continuidad y dinámica; algunas de las publicaciones donde se reporta su uso son: Tingsanchali y Maheswaran (1990), Bravo y Holly (1996), Zhou et al (1994), entre muchos otros; en los últimos artículos publicados se han hecho modificaciones al modelo original de turbulencia k-e. La viscosidad turbulenta se calcula con la expresión
ε
ν µk
c = 2
t (C.1)
donde cµ es una constante empírica, k es la llamada energía cinética turbulenta del flujo y e indica la tasa de disipación de dicha energía. Estos parámetros se obtienen al resolver las ecuaciones diferenciales parciales semi-empíricas de transporte siguientes
+
∂∂
∂∂
+
∂∂
∂∂
=∂∂
+∂∂
+∂∂
Yk
YXk
XYk
vXk
utk
k
t
k
t
σν
σν
hc
UP
fh
3*+− ε (C.2)
+
∂∂
∂∂
+
∂∂
∂∂
=∂∂
+∂∂
+∂∂
YYXXYv
Xu
ttt ε
σνε
σνεεε
εε2
4*
2
21 hU
ck
cPk
c h εεεεε
+− (C.3)
donde
222
22
∂∂
+∂∂
+
∂∂
+
∂∂
=Xv
Yu
Yv
Xu
P ttth ννν ; ;Cg
c f = VcU f=* ;
µε
ε ccc
cf
4/326.3= ; ;49.1=µc ;43.11 =εc ;92.12 =εc ;0.1=kσ 3.1=εσ

118
Las expresiones C.1 a C.3 forman la versión rectangular del modelo k-e. Para acoplar dichas ecuaciones a la versión covariante del modelo de hidrodinámica, es necesario expresarlas en función de las coordenadas curvilíneas y los componentes covariantes del vector velocidad. Debido a que las ecs C.2 y C.3 son escalares, su trasformación se hace aplicando la regla de la cadena dada por las ecs 3.6. A continuación, se muestra la trasformación de los términos que forman la ecuación de transporte del parámetro k
?? *
?
*
?
∂∂
−∂∂
=∂∂
=k
g
ykg
y
Xk
k x (C.4a)
?? *
?
*
?
∂∂
+∂∂
−=∂∂
=k
g
xkg
x
Yk
k y (C.4b)
∂∂
−∂∂
=
∂∂
)(?
)(?
1
*
?
*
?xtxt
kx
k
t kg
yk
g
yk
Xνν
σσν
(C.5a)
∂∂
+∂∂
−=
∂∂
)(?
)(?
1
*
?
*
?ytyt
ky
k
t kg
xk
g
xk
Yνν
σσν
(C.5b)
En cuanto a los términos de Ph, se tiene
?? *
?
*
?
∂∂
−∂∂
=∂∂ u
g
yug
y
Xu
(C.6)
Al sustituir la ec 3.6a en la C.6 se obtiene
∂∂
+∂∂
=∂∂
)(?
)(? )?(2)?(1
*
? vTuTg
y
Xu
∂∂
+∂∂
− )(?
)(? )?(2)?(1
*
? vTuTg
y (C.7)
De manera similar se obtienen
∂∂
+∂∂
=∂∂
)(?
)(? )?(4)?(3
*
? vTuTg
y
Xv
∂∂
+∂∂
− )(?
)(? )?(4)?(3
*
? vTuTg
y (C.8)
∂∂
+∂∂
−=∂∂
)(?
)(? )?(2)?(1
*
? vTuTg
x
Yu
∂∂
+∂∂
+ )(?
)(? )?(2)?(1
*
? vTuTg
x (C.9)
∂∂
+∂∂
−=∂∂
)(?
)(? )?(4)?(3
*
? vTuTg
x
Yv
∂∂
+∂∂
+ )(?
)(? )?(4)?(3
*
? vTuTg
x (C.10)

119
donde ;*
?1
g
yT = ;
*
?2
g
yT
−= ;
*
?3
g
xT
−=
*
?4
g
xT =
Al sustituir las expresiones C.4, C.5, C.6, C.7, C.8, C.9 y C.10, en la C.2, se obtiene la ecuación de transporte del parámetro k en función de las coordenadas curvilíneas
=
∂∂
+∂∂
−+
∂∂
−∂∂
+∂∂
???? *
?
*
?
*
?
*
? kg
xkg
xv
kg
ykg
yu
tk
∂∂
−∂∂
∂∂
???1
*
?
*
?
*
? kg
ykg
y
g
ytt
k
ννσ
+
∂∂
−∂∂
∂∂
−???
1
*
?
*
?
*
? kg
ykg
y
g
ytt
k
ννσ
∂∂
+∂∂
−∂∂
−???
1
*
?
*
?
*
? kg
xkg
x
g
xtt
k
ννσ
+
∂∂
+∂∂
−∂∂
+???
1
*
?
*
?
*
? kg
xkg
x
g
xtt
k
ννσ
hc
UP
fh
3*+−+ ε (C.11)
donde ahora Ph se calcula en función de las expresiones C.7 a C.10.
De forma similar se obtiene la ecuación de trasporte del parámetro e. A continuación, se escribe la correspondiente ecuación en coordenadas curvilíneas generales
=
∂∂
+∂∂
−+
∂∂
−∂∂
+∂∂
???? *
?
*
?
*
?
*
? εεεεεg
x
g
xv
g
y
g
yu
t
+
∂∂
−∂∂
∂∂
???1
*
?
*
?
*
? εν
εν
σ ε g
y
g
y
g
ytt +
∂∂
−∂∂
∂∂
−???
1
*
?
*
?
*
? εν
εν
σ ε g
y
g
y
g
ytt
+
∂∂
+∂∂
−∂∂
−???
1
*
?
*
?
*
? εν
εν
σ ε g
x
g
x
g
xtt +
∂∂
+∂∂
−∂∂
+???
1
**
?
*
? εν
εν
σξ
ε g
x
g
x
g
xtt
2
4*
2
2
21 hU
cck
cPk
c h εεεεεε
++− (C.12)