Modelación estanque alimentado por agua y sal, comparación de estado natural y con control
18
Pontificia Universidad Católica de Valparaíso Escuela de Ingeniería Química Alumno: Héctor Domínguez. Profesor: Javier Silva. Modelación de estanque alimentado por flujo de agua y flujo de saturado de sal. EIQ 540 – CONTROL DE PROCESOS
-
Upload
hector-dominguez -
Category
Documents
-
view
8 -
download
0
description
Modelación de estanque alimentado por flujos.
Transcript of Modelación estanque alimentado por agua y sal, comparación de estado natural y con control
Modelacin de estanque alimentado por flujo de agua y flujo de saturado de sal.
1
Contenido
Modelacin2Comportamiento natural5Funcin de transferencia6Dinmica: Actuador y Sensor9Actuador9Sensor11Lazo de control12Conclusin13
1
ModelacinSe requiere modelar un estanque alimentado por dos corrientes F1 compuesta por agua, y la corriente F2 con una concentracin saturada de sal en agua, dando como resultado una tercera corriente F3, compuesta por agua y sal.Para la modelacin del sistema se tomaron las siguientes suposiciones: Nivel del estanque variable, por lo que el volumen dentro de l tambin cambiar respecto al tiempo. Flujo F2 posee una composicin de 360 Kg/m3 para que est saturado de sal. Se asumieron las densidades iguales y constantes para efectos de clculos. Consideramos una mezcla homognea dentro del estanque por lo que tanto la concentracin de sal dentro y en F3 es similar.
Acentuacin definiremos las unidades del sistema:
Ecuacin 1 Modelo diferencial altura respecto a tiempo considerando ecuacin de Bernoulli.
Ecuacin 2 Modelo diferencial de concentracin respecto a tiempo.
Desarrollando la ecuacin 3 obtenemos la siguiente ecuacin:
Antes de aplicar la transformada de Laplace debemos linealizar las siguientes expresiones:
Reemplazando:
Ecuacin 3 Modelo linealizado de concentracinLinealizando la ecuacin 1:
Ecuacin 4 Modelo linealizado de alturaAplicando la transformada de Laplace a la ecuacin 4:
Para efectos de clculos se utilizaron los siguientes valores:
Siendo:
Reemplazando en la ecuacin 4:
Ecuacin 5 Ecuacin de altura en dominio s
Aplicando la transformada de Laplace a la ecuacin 3:
Siendo:
Reemplazando:
Ecuacin 6 Modelo de concentracin en dominio sComportamiento naturalPara el comportamiento natural se decide mantener constante los flujos y as obtener la concentracinReemplazando las constantes obtenidas:
Funcin de transferenciaComo objetivo para los datos supuestos, como set point se considerar una concentracin final en el estanque de 0.8 [Kg/m3], por lo que surge la pregunta de Qu deseo manipular? Cuando se manipula F1, sea que F10 la concentracin dentro del estanque tender a ser igual a la de salida C2=C Cuando se manipula F2, F20 la concentracin C=0.Por lo que se define manipular F2, con el objetivo de diluir la concentracin en el estanque con un valor menor al comportamiento natural calculado. Definido esto, F2 pasa a ser variable.Las ecuaciones quedan definidas de la siguiente manera:
Para los puntos de cercana de F2-0 y h0, estos se encuentran en el estado estacionario:
Definiremos las siguientes constantes:
Antes de aplicar la transformada de Laplace debemos nuevamente utilizar Taylor en varias variables.
Aplicando la transformada de Laplace:
Sea:
Sea:
Dinmica: Actuador y Sensor
Actuador
La funcin de transferencia del actuador est definida por la siguiente ecuacin:
YXActuador
Nuestro actuador es una vlvula que controlar el flujo 2 por lo que la variable X tendr unidades de [V] y la variable de salida Y tendr unidades de [L/min] para la vlvula tenemos los siguientes datos:t[s]L[l/min]Voltaje[V]
013,011,6
213,011,6
418,916,8
619,617,4
821,319,0
1022,520,0
Por los datos observados se tiene un retardo L=2[s] y se procede a calcular de la siguiente manera:
Con este valor interpolamos linealmente entre los valores de 16,8 y 17,4 [V] y se obtiene un valor . Considerando el retardo . Para obtener la ganancia haremos una regresin lineal con la siguiente tabla:
L[l/min]Voltaje[V]
1311,6
18.916,8
19.617,4
21.319,0
22.520,0
Por lo tanto nuestra funcin de transferencia para el actuador queda determinada as:
Sensor
La funcin de transferencia del sensor est definida por la siguiente ecuacin:
YXSensor
Nuestro sensor de concentracin la variable X tendr unidades de C[g/L] y la variable de salida Y tendr unidades de [V] para el sensor tenemos los siguientes datos:t(s)C(Kg/m3)Voltaje(V)
000
200
400
67,86,942
88,87,832
109,38,277
Por los datos observados se tiene un retardo L=4[s] y se procede a calcular de la siguiente manera:
Interpolando linealmente la concentracin obtenida se obtiene un , cosiderando el retardo del sensor utilizado .Para obtener , realizaremos un regresin lineal a la siguiente tabla:t(s)C(Kg/m3)Voltaje(V)
400
67,86,942
88,87,832
109,38,277
Se obtuvo una pendiente m=0.89, lo cual representa el valor de , por lo que la funcin de transferencia queda de la siguiente manera:
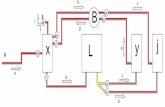
Lazo de control
Conclusin
Una vez obtenido el modelo para el estanque, se resolvi y analiz el comportamiento natural del sistema. Se creo una funcion multivariable en matlab, la cual nos permite resolver simultaneamente la variacin de altura en el estanque respecto al tiempo, como tambin la variacin de concentracin dentro de l.Como sabemos la solubilidad es la mxima cantidad de soluto que se puede disolver en una cantidad de solvente, a 25[C] la solubilidad de la sal en agua es de aproximadamente 360 [Kg/m3], por lo que como definicin del problema la corriente F2 tiene una concentracin saturada de sal.Obtenido el modelo y datos para la modelacin, para conocer el comportamiento natural del sistema, este se conoci aplicando la transformada de laplace obteniendo como resultado una concentracin de , correspondiente al doble obtenido por la simulacin en Matlab, cabe destacar que este es un mtodo rpido para conocer el comportamiento natural. Definido el comportamiento natural del sistema, se deseaba conocer que variable manipular, como objetivo del sistema de plante el llegar a una concentracin final de 0.8 [Kg/m3], por lo cual para llegar a este valor se tiene que manipular el flujo que contiene una concentracin de sal saturada. Para la obtencin de los puntos de cercana estos se calcularon a partir del estado estacionario, con estos valores se evaluaron las expansiones realizadas con el teorema de Taylor.El tener un retardo en el proceso requiere incorporar operaciones ms complejas, los retardos al ser grandes impiden la correcta operacin de los controladores y los sensores, esto implica que requieran plazos extensos para arrojar una medicin o bien que los actuadores requieran un tiempo importante para generar un cambio, esto conlleva a que las perturbaciones no se detecten oportunamente y la accin de control tarda en hacer efecto en el proceso, por lo tanto un incremento en el retardo introduce un mayo ngulo de desfase.
TextoTextoSet point
Controlador
0.89
+
+
+
+