Morfología del robot -...
76
Morfología del robot Introducción
-
Upload
phungxuyen -
Category
Documents
-
view
219 -
download
0
Transcript of Morfología del robot -...

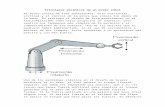
Morfología del robot
Introducción

Morfología del robot
Un robot está formado por los siguientes e l e m e n t o s : e s t r u c t u r a m e c á n i c a , transmisiones, sistema de accionamiento, sistema sensorial, sistema de control y elementos terminales (efector final).

¿Qué es un robot?
Subsistema mecánico Brazos, manos, muñeca, vehículo, actuadores, engranes, tendones, frenos.
Subsistema proceso Entorno, gente, fábrica, tarea, otros robots.
Subsistema eléctrico Motores, computadoras, interfases, ligas de comunicación, sensores, fuentes de poder.
Subsistema sensores Internos Externos
Posición Visión
Velocidad Tacto
Fuerza Químico
Subsistema control Modelos de mecánica, modelos de procesos, transformaciones geométricas, lazos de control.
Subsistema planeación Percepción, fisura de dos imágenes, modelado del entorno, planeación de trayectorias.

Estructura general de un robot
• Brazo y juntas (Base) • Efector Final (Herramental, sujetador)
• Sujeción y manipulación • Llevar a cabo operaciones de manufactura • Sensar la posición o forma de un objeto
• Sistema motriz • Eléctrico, Hidráulico, Neumático
• Controlador • Movimientos, Funciones
• Inteligencia de Robots • Interfase con el medio ambiente

Estructura general de un robot

Componentes de un robot
Manipulador. Este es el cuerpo principal del robot y consiste de eslabones, las junturas o articulaciones y otros elementos estructurales del robot. Sin los otros elementos un manipulador no es un robot.
Actuador final (End effector). Esta es la parte que se conecta al último eslabón, la cual generalmente maneja objetos, realiza conexiones con otras máquinas o ejecuta las tareas requeridas.
Las manufactureras de robots por lo general no diseñan o venden efectores finales. En la mayoría de los casos, lo que suministran es un simple gripper o sujetador.

Componentes de un robot
Por lo general, la mano del robot esta provista de conexiones especiales que son específicamente diseñadas para un propósito.
El trabajo de los ingenieros de la compañía o de consultores externos es diseñar e instalar los efectores finales en el robot y hacer que funcionen para una situación dada.
Una antorcha para soldar, una pistola de spray para pintar, un dispositivo que aplique adhesivo y un dispositivo para manejo de partes son algunas pocas posibilidades que se pueden tener para el efector final.
En la mayoría de los casos, la acción del efector final está controlado por el controlador del robot o el controlador se comunica con el dispositivo de control del efector final como un PLC.

Componentes de un robot
Actuadores. Los actuadores son los músculos del manipulador. Tipos comunes de actuadores son servomotores, motores de paso, cilindros neumáticos y cilindros hidráulicos. Los actuadores son controlados por el controlador del robot.
Sensores. Los sensores son usados para recolectar información acerca del estado interno del robot o para comunicarse con el ambiente externo.
Como los humanos, el robot necesita saber donde está localiza cada eslabón para poder saber la configuración del robot.
Los sensores integrados en los robots envían la información de cada eslabón o articulación al controlador, el cual determina la configuración del robot.

Componentes de un robot
Los robots en algunas ocasiones están equipados con dispositivos sensores externos como sistemas de visión, sensores de tacto, sintetizadores de voz, lo cual habilita al robot para comunicarse con el mundo exterior. Controlador. El controlador es parecido al cerebelo humano, aunque sin embargo no tiene el mismo poder que un cerebro.
El controlador recibe los datos de la computadora, controla el movimiento de los actuadores y coordina los movimientos con la información que los sensores retroalimentan.

Componentes de un robot
Supongamos que para que el robot levante una pieza de un pallet, es necesario que su primera articulación este a 35°. Si la articulación no se encuentra en esta magnitud, el controlador enviará una señal al actuador (una corriente para un motor eléctrico, aire a un cilindro neumático, o una señal a una servo válvula hidráulica), ocasionando que se mueva.
Entonces medirá el ángulo de la articulación a través de la retroalimentación del sensor ubicado en la articulación (un potenciómetro, un codificador o encoder). Cuando la articulación alcance el valor deseado, la señal se detiene.

Componentes de un robot
Procesador. El procesador es el cerebro del robot. Calcula los movimientos de las articulaciones del robot, determina que tanto y que tan rápido cada articulación debe moverse hacia la locación deseada con una velocidad especifica y vigila la acción coordinada del controlador y los sensores.
El procesador por lo general es una computadora, que funciona como cualquier otra computadora, pero está dedica a un propósito único. Requiere de un sistema operativo, programas, equipo periférico como monitores, y tiene las mismas limitaciones y capacidades que un procesador de PC.

Componentes de un robot
Software. Hay tres tipos de programas que se utilizan en un robot. Uno es el sistema operativo, el cual opera la computadora.
El segundo es el programa del robot, el cual calcula loa movimientos necesarios de cada articulación basado en las ecuaciones cinemáticas del robot. Esta información es mandada al controlador. Este programa puede ser de diferentes niveles, desde lenguaje máquinas hasta lenguajes sofisticados que utilizan los robots modernos.
El tercer grupo es una colección de rutinas y programas de aplicación que son desarrollados para utilizar los dispositivos periféricos de los robots, como rutinas de visión, o para ejecutar tareas especificas.

Componentes de un robot
Es importante notar que en la mayoría de los sistemas, el controlador y el procesador están localizados en la misma unidad. Aunque, estas dos unidades están en la misma caja e incluso están integradas en el mismo circuito, tienen dos funciones distintas.

ROBOTS INDUSTRIALES

Articulaciones y eslabones
l Una articulación de un robot es similar a una articulación del cuerpo humano.
l Provee de movimiento relativo entre partes del cuerpo del
robot. l Para conectar cada articulación se necesitan dos links o
eslabones denominados:
Componentes rígidos de los robots
El propósito de las Articulaciones es proveer movimiento relativo entre los links
Input link Output link

l Cada uno de los movimientos independientes que puede realizar cada articulación con respecto a la anterior, se denomina grado de libertad (GDL).
l El número de grados de libertad del robot viene dado por la suma de los grados de libertad de las articulaciones que lo componen.
l Las articulaciones empleadas son únicamente las de rotación y prismática con su solo GDL cada una, el número de GDL del robot suele coincidir con el número de articulaciones de que se compone.
Articulaciones

Articulaciones y eslabones
Tipo L. Provee movimiento lineal de link de entrada de forma paralela respecto al output link
Tipo O. Provee movimiento lineal entre el output y input l i n k p e r o d e f o r m a perpendicular.
Input Output
Output
Input

Articulaciones y eslabones Tipo R. Provee movimiento rotacional de link de entrada de forma perpendicular respecto al link de salida
Tipo T. Provee movimiento rotacional de forma paralela entre los ejes de los dos links (input y output)
Input
Output
Input Output

Articulaciones y eslabones
Tipo V Esta articulación provee movimiento entre los links de entrada y salida de manera perpendicular de los ejes de rotación

Articulaciones y eslabones

Distintos tipos de articulaciones para robots

Articulaciones
El empleo de diferentes combinaciones de articulaciones en un robot, da lugar a diferentes configuraciones, con características a tener en cuenta tanto en el diseño y construcción de robot como en su aplicación.
En la figura se muestran las combinaciones más frecuentes donde se atienden a las 3 primeras articulaciones, que son las más importantes a la hora de posicionar su extremo en un punto del espacio.

Articulaciones

Puesto que para posicionar y orientar un cuerpo de cualquier manera en el espacio son necesarios seis parámetros, tres para definir la posición y tres para la orientación, si se pretende que un robot posiciones y oriente su extremo de cualquier modo en el espacio.
En la práctica, a pesar de ser necesario los seis grados de libertad para tener total libertad en el posicionado y orientación del extremo del robot, muchos robots industriales cuentan con sólo cuatro o cinco GDL, por ser estos suficientes para llevar a cabo las tareas que se les encomiendan.
Articulaciones

Grados de libertad del robot ARC Mate 120/S-12

Existen también casos opuestos, en los que se precisan más de seis GDL para que el robot pueda tener acceso a todos los puntos de su entorno.
Así, si se trabaja en un entorno con obstáculos, del dotar al robot con grados de libertad adicionales le permitirá acceder a posiciones y orientaciones de su extremo a las que, como consecuencia de los obstáculos, no hubiera llegado con seis GDL.

Otra situación frecuente es la de dotar al robot de un GDL adicional que le permita desplazarse a lo largo de un carril, aumentando así el volumen del espacio al que puede acceder.
Cuando el número de grados de libertad del robot es mayor que los necesarios para realizar una determinada tarea se dice que el robot es redundante.

Transmisiones y reductores
Las transmisiones son los elementos encargados de transmitir el movimiento desde los actuadores hasta las articulaciones.
Se incluyen junto con las transmisiones a los reductores que son los encargados de adaptar el par y la velocidad de la salida del actuador a los valores adecuados para el movimiento de los elementos del robot.

Transmisiones
Dado que un robot mueve su extremo con aceleraciones elevadas, es de gran importancia reducir al máxima su momento de inercia.
Del mismo modo, los pares estáticos que deben vencer los actuadores dependen directamente de la distancia de las masas al actuador.
Por estos motivos se procura que los actuadores, por lo general pesados, estén lo más cerca posible de la base del robot. Esta circunstancia obliga a utilizar sistemas de transmisión que trasladen el movimiento hasta las articulaciones, especialmente a las situadas en el extremo del robot.

Transmisiones
Existen actualmente en el mercado robots industriales con acoplamiento directo entre accionamiento y articulación.
Un sistema de transmisión debe cumplir una serie de características básicas: debe tener un tamaño y peso reducido, se ha de evitar que presente juegos u holguras considerables y se deben buscar transmisiones con gran rendimiento.
Es muy importante que el sistema de transmisión a utilizar no afecte al movimiento que transmite, ya sea por el rozamiento inherente a su funcionamiento o por las holguras que su desgaste pueda introducir.
Hay que tener en cuenta que el sistema de transmisión sea capaz de soportar un funcionamiento continuo a un par elevado, y de ser posible a grandes distancias.

Sistemas de transmisión para robots

Reductores
Los reductores utilizados en robótica se les exige unas condiciones de funcionamiento muy restrictivas. La exigencia de estas características viene motivada por las altas prestaciones que se le piden al robot en cuanto a precisión y velocidad de posicionamiento.
Se buscan reductores de bajo peso, reducido tamaño, bajo rozamiento y que al mismo tiempo sean capaces de realizar una reducción elevada de velocidad en un único paso.

Reductores
Se tiende a minimizar su momento de inercia.
Por motivos de diseño, tienen una velocidad máxima de entrada admisible, que como regla general aumenta a medida que disminuye el tamaño del motor.
Existe una limitación en cuanto al par de salida nominal permisible (T2) que depende del par de entrada (T1) y de la relación de transmisión a través de la relación:
T2 = ηT1 ω1/ω2
donde (η) es el rendimiento que puede llegar a ser del 100% y la relación de reducción de velocidades (ω) varía entre 50 y 300.

Reductores
Puesto que los robots trabajan en ciclos cortos que implican arranques y paros, es de gran importancia que el reductor sea capaz de soportar pares elevados puntuales.
Se busca que el juego angular o backslash sea lo menor posible.
Poseer una alta rigidez torsional, definida como el par que hay que aplicar sobre el eje de salida para que, manteniendo bloqueado el de entrada, aquél gire un ángulo unitario.

Características de reductores para robótica

Accionamiento directo
Este tipo de accionamiento aparece a raíz de la necesidad de utilizar robots en aplicaciones que exigen combinar gran precisión con alta velocidad.
Los reductores introducen una serie de efectos negativos, como son juego angular, rozamiento o disminución de la rigidez del accionador, que pueden impedir alcanzar los valores de precisión y velocidad requeridos.

Accionamiento directo
Las principales ventajas que se derivan de la utilización de accionamiento directo son las siguientes:
l Posicionamiento rápido y preciso, pues se evitan los
rozamientos y juegos de las transmisiones y reductores. l Aumento de las posibilidades de controlabilidad del sistema a
costa de una mayor complejidad. l Simplificación del sistema mecánico al eliminarse el reductor.

Accionamiento directo
El principal problema del accionamiento directo radica en el motor a emplear.
Deben emplearse motores que proporcionen un par elevado a bajas revoluciones manteniendo la máxima rigidez posible.
Entre los motores empleados se encuentran los motores síncronos y de continua sin escobillas, ambos con imanes permanentes fabricados con materiales especiales (samario-cobalto).
Se utilizan también motores de inducción de reluctancia variable.
La necesaria utilización de este tipo de motores encarece notablemente el sistema de accionamiento.

Accionamiento directo
Por este motivo los robots de accionamiento directo son generalmente de tipo SCARA, cuyo diseño se corresponde bien a las necesidades que el accionamiento directo implica.
Al eliminar el reductor también se disminuye de forma considerable la resolución real del codificador de posición acoplado al eje.

Limitaciones
l Un robot es ciego
l Un robot ciego es sensible a variación en el producto, el proceso y las tolerancias del producto.
Características de los robots

Ventajas y Desventajas de los robots
l La robótica y la automatización pueden en muchas situaciones, incrementar la productividad, seguridad, eficiencia, calidad y consistencia de los productos.
l Los robots pueden trabajar en ambientes peligrosos sin la necesidad de sostenimiento de vida, comodidad, o preocupación por la seguridad.
l Los robots no necesitan confort ambiental, como iluminación, aire acondicionado, ventilación y protección contra el ruido.

Ventajas y Desventajas de los robots
l Los robots pueden trabajar continuamente sin experimentar fatiga o aburrimiento, no se enfadan, no tienen resacas, y no necesitan seguro médico ni vacaciones.
l Los robots tienen una precisión repetitiva todo el tiempo, a menos que algo les suceda o por el desgaste por el uso frecuente.
l Los robots pueden ser mucho más exactos que los humanos. Las exactitudes lineales típicas son de unos pocos miles de pulgada. Nuevos robots tienen exactitudes de micropulgadas.

Ventajas y Desventajas de los robots
l Los robots y sus accesorios y sensores pueden tener capacidades más allá de las de los humanos.
l L o s r o b o t s p u e d e n p r o c e s a r m ú l t i p l e s t a r e a s
simultáneamente. Los humanos solo pueden procesar una tarea a la vez.
l Los robots reemplazan a los trabajadores humanos creando
problemas económicos, como pérdida de salarios, problemas sociales e insatisfacción y resentimiento entre los trabajadores.

Ventajas y Desventajas de los robots
l Los robots carecen de la capacidad de responder a emergencias, a menos que la situación se haya predicho y la respuesta sea parte del sistema. Se necesitan medidas de seguridad para asegurar que no lesionen a operadores o máquinas trabajando. Estas incluyen:
v Respuestas inapropiadas o erróneas. v Una falta de poder de toma de decisiones. v Una pérdida de poder. v Daño al robot u otros dispositivos. v Lesiones humanas.

Ventajas y Desventajas de los robots
l Los robots, aunque superiores en cierto sentido, tienen una limitada capacidad en :
v Grados de libertad (GDL). v Destreza. v Sensores. v Sistemas de visión. v Respuesta en tiempo real.

Ventajas y Desventajas de los robots
l Los robots son costosos debido a:
v Costo inicial del equipo. v Costo de instalación. v Necesidades de periféricos. v Necesidades de entrenamiento. v Necesidades de programación.

Desventajas del Trabajo Robotizado
l El costo de un robot permanece constante con baja reducción.
l Requieren gran capital al instalarse que se deprecia con los años vs. el recurso humano que cuesta el tiempo trabajando.
l Un robot se debe justificar económicamente.

l El recurso humano puede sentirse amenazado por el desempleo.
l Desuso del equipo al terminar el proyecto.
Desventajas del Trabajo Robotizado
Alternativas Compañerismo Entrenamiento Reubicación

Justificación de un Robot
l Aumentar utilidades. l Efectuar tareas imposibles para un humano. l Realizar tareas que son muy peligrosas. l Aumentar/mejorar calidad.
Los robots deben ser costeables y ahorrarle dinero a la compañía

Características de los robots
Carga útil (payload)
La carga útil es el peso que el robot puede cargar y permanecer dentro de sus otras especificaciones.
Por ejemplo, la capacidad de carga máxima de un robot puede ser mucho más grande que su carga útil especificada, pero al nivel máximo, puede volverse menos preciso, puede no seguir de manera precisa la trayectoria especificada o puede tener desviaciones excesivas.
La carga útil de los robots comparados con su propio peso es usualmente muy pequeña.

Características de los robots
Por ejemplo, el robot Fanuc LR Mate tiene un peso mecánico de 86 lbs y una carga útil de 6.6 lbs; el robot M-16i tiene un peso mecánico de 594 lbs y una carga útil de 35 lbs.
Consideraciones Estáticas
l Los efectos de gravedad causan flexión del brazo y del sistema
de soporte. l Los engranes y bandas con frecuencia tienen cantidades
notorias de holgura que causan errores de posicionamiento. l Los efectos térmicos como los cambios de temperatura
conducen a cambios dimensionales en la estructura del robot.

Características de los robots
Consideraciones Dinámicas l Los efectos de la aceleración como las fuerzas inerciales
pueden conducir a flexión en los miembros estructurales.
l Esto ocurre normalmente cuando el robot se mueve muy rápido. Sin embargo esto debe considerarse en la etapa de diseño.

Características de los robots
Alcance
El alcance es la distancia máxima que un robot puede alcanzar dentro de su envolvente de trabajo
Muchos puntos dentro de la envolvente de trabajo del robot puede alcanzarse con cualquier orientación deseada (destreza).
Sin embargo, para otros puntos, cerca de los limites de capacidad de alcance del robot, la orientación no puede ser especificada como se desea (punto no diestro).
El alcance es una función de la longitud de las articulaciones y de la configuración del robot.

Características de los robots
Precisión La precisión está definida como que tan exacto un punto especificado se puede alcanzar.
Esta es una función de la resolución de los actuadores, así como también de sus dispositivos de retroalimentación. La mayoría de los robots industriales tienen una precisión de 0.001 pulgadas o mejor. La precisión se refiere a la capacidad del robot para posicionar el extremo de la muñeca (o una herramienta sujeta a la muñeca) en un punto seleccionado dentro de su área de trabajo.

Características de los robots
La habilidad del robot para alcanzar una posición particular en el espacio depende de su habilidad para dividir sus movimientos de juntas en pequeños incrementos (resolución espacial).
La precisión también es afectada por inexactitudes mecánicas, tales como flexión de sus componentes, inexactitud de sus engranes, etc.

Características de los robots
La resolución esta basada en un número limitado de puntos que el robot puede manejar, estos se muestran como puntos negros en la figura.
Estos puntos están separados por un milímetro o menos, dependiendo del tipo de robot. Por ejemplo, si se requiere de una posición de 456.4 mm, y el sistema puede posicionarse al milímetro más cercano, 456 mm, este resulta en un error de exactitud de 0.4 mm.

Características de los robots
Los puntos negros en la figura anterior se conocen como puntos direccionables debido a que representan posiciones a las que el robot puede moverse.
La capacidad para dividir el rango de la junta en puntos direccionables es una función de la capacidad de almacenamiento (memoria) en bits del controlador para esa junta. Si n es el número de bits dedicados a una junta en particular, el número de puntos direccionables en el rango de movimiento de la junta esta dado por:
El control de resolución CR es por lo tanto definido como la distancia entre puntos direccionables adyacentes.
n2 blesdirecciona puntos de número =
nCR2
junta la de rango=

Características de los robots
La última ecuación considera únicamente una junta del robot. Un término relacionado en robótica es la resolución espacial, la cual combina el control de resolución con los errores mecánicos en la junta y las uniones asociadas.
Si los errores mecánicos se caracterizan mediante una distribución normal, la resolución espacial esta definida en términos de la desviación estándar como:
La resolución espacial completa del robot deberá incluir el efecto de todas las juntas, combinadas con el efecto de sus errores mecánicos.
mec.)error del std. desv.(6sCRSR +=

Características de los robots
En una situación ideal el manipulador se detendrá en las locaciones especificadas.
La precisión será la mitad del control de la resolución. El control de la resolución será las divisiones más pequeñas en las que el espacio de trabajo pueda dividirse.

Características de los robots

Características de los robots
Repetibilidad
La repetibilidad es un término estadístico. No describe el error con respecto a las coordenadas absolutas, en cambio, describe como un punto es repetido.
La repetibilidad se refiere a la habilidad del robot para posicionar su muñeca (o herramienta) nuevamente en un punto en el espacio que fue previamente enseñado. Las inexactitudes mecánicas en el brazo del robot y los componentes de la muñeca son las fuentes principales de errores de repetibilidad.

Características de los robots
Cada vez que el robot intente regresar al punto programado éste regresara a una posición ligeramente diferente.
Se puede considerar a la repetibilidad como:
mecanico)error delestándar desviación(3dadRepetibili s±=

Características de los robots
La siguiente figura muestra el error de posición y la repetibilidad en un plano de dos dimensiones. Aunque el objetivo es siempre fallado por un amplio margen, si el mismo error es repetido, entonces decimos que la repetibilidad es alta y la precisión pobre.

Características de los robots
La precisión y repetibilidad son funciones de:
l Resolución. El uso de sistemas digitales, y otros factores significa que únicamente se dispone de un número limitado de posiciones. Así, las posiciones alimentadas son ajustadas a la posición discreta más cercana.
l Error del Modelo Cinemático. El modelo cinemático
del robot no se ajusta correctamente al robot. Como resultado el cálculo del ángulo de las uniones contiene un pequeño error.

Características de los robots
l Errores de Calibración. La posición determinada durante la calibración puede estar desplazada ligeramente, resultando un error en la posición calculada.
l Errores aleatorios. El problema aparece cuando el
robot opera. Por ejemplo, fricción, pandeamiento estructural, expansión térmica, deslizamiento en las transmisiones, etc. pueden causar variaciones en la posición.

Características de los robots
Área de Trabajo (workspace) El área de trabajo de un robot esta definido como el envolvente o espacio dentro del cual el robot puede manipular el extremo de su muñeca. Algunas veces es referido como el envolvente de trabajo.
El área de trabajo esta determinado por el número y tipos de juntas y uniones, y los rangos de las diversas juntas. La forma del área de trabajo depende principalmente del tipo de configuración del robot.

Características de los robots
El área alcanzable por el efector final por si mismo usualmente no es considerada por como parte de la envolvente de trabajo.
Un claro entendimiento del área de trabajo de la envolvente del robot a ser utilizado es importante porque toda la interacción con otras máquinas, partes y procesos toma lugar solamente dentro del volumen de este espacio.
Para diseñar una aplicación para un robot, el área de trabajo de la aplicación debe estar dentro de la envolvente.

Características de los robots
Áreas de trabajos típicas para las configuraciones de robot comunes.

Características de los robots
Envolvente de trabajo de un robot de coordenadas cartesianas

Características de los robots
Envolvente de trabajo de un robot de coordenadas cilíndricas

Características de los robots Envolvente de trabajo de un robot de
coordenadas esféricas

Características de los robots
Envolvente de trabajo de un robot articulado

Ejemplo En una celda de manufactura propuesta, un robot es usado para cargar/descargar dos máquinas. La dimensión de las máquinas, el alimentador, el buffer y el estante de partes terminadas se muestra en la siguiente figura. Diseñe la distribución (layout) de la celda.
Dispositivos de la celda de manufactura

Solución Una distribución circular es adoptada, porque mantiene una distancia relativamente constante entre cada dispositivo y el robot. El robot seleccionado puede alcanzar a cualquiera de ellos. La envolvente del espacio de trabajo del robot es un área circular de 7 pies de diámetro y un ángulo de acción de 270°.
Distribución de la celda

Ejemplo Dado el radio interior r1 y el radio exterior r2, de la huella del espacio de trabajo de un robot cilíndrico, calcular el área máxima rectangular que el robot puede alcanzar.
Huella del espacio de trabajo de un robot cilíndrico

Solución