Motor de Induccion Trifasica
17
Click here to load reader
description
motor de induccion trifasico
Transcript of Motor de Induccion Trifasica

UNIVERSIDAD DE ANTOFAGASTA
FACULTAD DE INGENIERÍA
DEPARTAMENTO DE ELECTRICIDAD
INFORME FINAL 4
LABORATORIO DE MAQUINAS ELÉCTRICAS
MOTOR DE INDUCCIÓN TRIFÁSICO
Antofagasta, 30 de Noviembre de 2005
I. INTRODUCCION.
Se llama máquina de inducción o asincrónica a una máquina de corriente alterna, en la cual la velocidad derotación del rotor es menor que la del campo magnético del estator y depende de la carga. La máquinaasincrónica tiene la propiedad de ser reversible, es decir, puede funcionar como motor y como generador.
El motor asincrónico tiene dos partes principales: estator y rotor. El estator es la parte fija de la máquina encuyo interior hay ranuras donde se coloca el devanado trifásico que se alimenta con corriente alterna trifásica.La parte giratoria de la máquina se llama rotor y en sus ranuras también se coloca un devanado. El estator y elrotor se arman de chapas estampadas de acero electrotécnico.
II. OBJETIVOS.
Determinar las características de operación del motor de inducción trifásico, en la partida y bajo condicionesde carga.
Además esta experiencia sirve para aplicar los conocimientos enseñados en la cátedra. Utilizando lasformulas, documentos y material a fin.
III. MARCO TEORICO
III.1. Máquinas de Inducción.
Se denomina con este nombre a la máquina cuya armadura o rotor no está conectada a fuente alguna depotencia, sino que la recibe por inducción del flujo creado por los arrollamientos dispuestos en el estator, elcual está alimentado por corrientes mono o polifásicas.
Cuando se excita una máquina de inducción con una corriente polifásica equilibrada se crea en el entrehierroun campo magnético rotativo que gira a velocidad sincronía:
Donde:
n : Velocidad síncrona
1

f : Frecuencia de la red
p : Número de polos
Cuando se habla de máquina de inducción, generalmente se está refiriendo al motor de inducción, pues elgenerador de inducción no tiene mucha aplicación.
Existen dos tipos de rotor, uno es el rotor bobinado y el otro es el rotor jaula de ardilla.
a) Rotor Bobinado.
El rotor bobinado está compuesto de un devanado polifásico similar al del estator y con el mismo número depolos que él. Los terminales del devanado del rotor se conectan a anillos rozantes aislados, montados sobre eleje, en los que se apoyan escobillas de carbón, de manera que dichos terminales resultan accesibles desde elexterior, según se aprecia en la Figura 1.
Fig. 1. Rotor bobinado.
−3−
b) Rotor Jaula de Ardilla.
El rotor jaula de ardilla está formado por varillas conductoras alojadas en ranuras que existen en el hierro delpropio rotor y cortocircuitadas en ambos extremos mediante dos anillos planos conductores dispuestos en cadalado del rotor, según se puede apreciar en la Figura 2.
Fig. 2. Rotor jaula de ardilla.
Supongamos que
n : rpm del rotor
ns : rpm del estator (velocidad síncrona, velocidad del campo rotatorio del estator)
El rotor se retrasa respecto al campo del estator en:
2

El deslizamiento se expresa por:
Es decir:
El movimiento relativo entre los conductores del rotor respecto al flujo, induce en ellos una tensión a unafrecuencia s · f, llamada frecuencia de deslizamiento.
Cuando el rotor está girando en la misma dirección que el campo inductor, la frecuencia de las corrientesrotóricas es s · f.
El campo creado por estas corrientes rotóricas girará a la velocidad:
respecto al rotor, adelantándose.
La velocidad del campo del rotor será:
Es decir, ambos campos el del estator y el del rotor permanecen estacionarios uno respecto al otro creándoseun torque constante.
III.2. El motor de inducción en reposo con rotor cerrado y bloqueado.
Cuando el rotor conduce corriente, hay dos fmm en la máquina y el flujo principal está determinado por lafmm resultante.
Las dos fmm son:
Donde:
kdp = kd · kp
m : número de fases
N : número de vueltas
p : número de polos
I1 , I2 : corrientes del primario y secundario
3

Suposiciones para referir al primario las cantidades secundarias.
1.− El rotor conserva el valor original de su fmm
I2' fluyendo en el devanado del estator, producirá la misma fmm que la producida por I2 fluyendo en eldevanado del rotor.
2.− Los KVA del rotor conservan su valor original
m1 · E2' · I2' = m2 · E2 · I2
reemplazando I2' de la Ec. 7, se tiene
E2' = N1 · kdp1 · E2 ( 8 )
N2 · kdp2
3.− Las pérdidas I2R del rotor conservan su valor original
m1 · I2'2 · R2' = m2 · I22 · R2
sustituyendo I2', se tiene
R2' = m1 · N1 · kdp1 · 2 R2 ( 9 )
m2 · N2 · kdp2
4.− La energía magnética de los flujos de dispersión del rotor 1 · L1 · I2 , conserva su valor original. 2
m1 · 1 · L2' · I2'2 = m2 · 1 · L2 · I2 2
2 2
X2' = m1 · N1 · kdp1 · 2 X2 ( 10 )
m2 · N2 · kdp2
La fmm total que produce el flujo principal � está dada por dos fmm. Estas dos fmm producen la fmmresultante:
F1 − F2 = FR , entonces F1 = F2 + FR
0.9 · m1 · N1 · kdp1 · I1 − 0.9· m 2 · N2 · kdp2 · I2 = 0.9 · m1 · N1 · kdp1 · Im
4

p p p
Por la Ec. 7 se llega a:
I1 − I2' = Im
Las ecuaciones del estator son:
V1 = E1 + I1· R1 +jI1 · X1
Donde:
X1 = Reactancia de dispersión
R1 = Resistencia del estator
E1 = FEM inducida por el flujo principal en el devanado del estator.
Las ecuaciones del rotor (bloqueado) son :
E2' = I2' · R2' + j I2' · X2' ( 13 )
Donde:
E2' : FEM en el devanado del rotor referido al estator
R2' : Resistencia referida al estator
X2' : Reactancia de dispersión del rotor referido al estator
Las consideraciones hechas se refieren a un motor de inducción con un rotor devanado y una resistenciaexterna en el circuito del rotor. Esto también es válido para el rotor jaula de ardilla, pero sin considerar quetiene una resistencia externa en el rotor.
III.3. El motor de inducción cuando gira.
Cuando el rotor gira se induce en él una tensión con una frecuencia f2 = s·f1 .
E2S = 4.44 · N2 · f2 · � · kdp2
como E2 = 4.44 · N2 · f1 · � · kdp2 , entonces
E2S = s · E2 , de modo que
E2S' = N1 · kdp1 · E2S = N1 · kdp1 · s ·E2 = s ·E2'
N2 · kdp2 N2 · kdp2
Haremos E1 = E2S' , por lo que la ecuación 13 se transforma en :
s ·E2' = I2' · R2' + jI2'·s X2'
5

III.4. Circuito equivalente del motor de inducción
Las ecuaciones son:
V1 = E1 + I1· R1 +jI1 · X1
E2' = I2' · R2' + j I2' · X2'
I1 − I2' = Im
En que Im es la corriente requerida en el estator para crear un flujo resultante en el entrehierro. Esta corrientese puede descomponer en dos componentes:
a) IF0 : corriente en fase con E1 que corresponde a las pérdidas por histérisis y corrientes de Foucault ( Fo ).
b) I� : corriente retrasada en 90 º eléctrico respecto a E1 , que corresponde a la corriente magnetizante.
Im = IF0 + I�
IF0 = gm · E1
I� = − jbm · E1 , luego
Im = Ym · E1
con Ym = gm − jbm
Fig. 3. Diagrama fasorial.
De las ecuaciones 15 ,16 17, 19 y 20 se deduce que el circuito equivalente es:
6

Fig. 4. Circuito equivalente con transformador ideal.
Pasando por los parámetros del rotor al estator, para eliminar el transformador ideal, se obtiene :
Fig. 5. Circuito equivalente simplificado.
Eliminando las primas del rotor por comodidad y representando R2 / s como variable, tenemos :
Fig. 6. Circuito equivalente final.
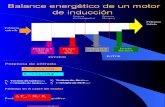
Del circuito se aprecia que la potencia total transferida por el estator a través del entrehierro es:
Pc = m1 · I22 · R2 s
Donde Pc : Potencia del campo giratorio.
Las pérdidas del cobre del rotor son:
PCU R = m1 · I22 · R2
Por lo tanto, la potencia mecánica desarrollada por el motor es:
Pm = Pc − PCU R = m1 · I22 · R2 + m1 · I22 · R2
7

s
Luego
Pm = m1 · I22 · R2 · (1 − s )
s
Pm = (1 − s ) · Pc
Las pérdidas en el cobre también se pueden expresar como:
PCU = s · Pc
De aquí se puede ver que de la potencia total suministrada al rotor, la fracción (1 − s) se convierte en potenciamecánica y la fracción s se disipa en las pérdidas en su propio cobre. Por lo tanto, un motor de inducción quetrabaja con gran deslizamiento es necesariamente de muy bajo rendimiento, entonces, el circuito equivalentees:
Fig. 7. Circuito equivalente, con pérdidas en el cobre.
El Torque electromagnético es:
T = Pm � = �S · ( 1 − s )
�
T = m1 · I22 · R2 · (1 − s ) �S · ( 1 − s )
s
T = 1 · m1· I22 · R2
�S s
o T = Pc �S
NOTA: Todos los parámetros y circuitos están referidos al primario.
IV. CUESTIONARIO.
1.− A partir del circuito equivalente, determine las expresiones de:
Torque = f(desplazamiento)
8

Torque máximo y desplazamiento al que ocurre
Torque de partida
Valor de la resistencia adicional a intercalar en el rotor para Tmax = Tpartida
Iestator = fdesplazamiento
La figura 8 muestra el circuito equivalente de un motor de inducción:
Fig. 8. Circuito equivalente del motor de inducción.
Del circuito se observa que la magnitud de la corriente I2 está dada por:
Se sabe que el torque se encuentra expresado como se muestra a continuación:
Al reemplazar las ecuaciones anteriores, se obtiene el torque en función del desplazamiento, para el caso deun motor trifásico m1 se considera igual a 3.
El torque máximo ocurre cuando la potencia del entrehierro es máxima. Como la potencia en el entrehierro esigual a la potencia consumida en la resistencia R2/S, el torque máximo ocurrirá cuando sea máxima lapotencia consumida en esta resistencia y esto ocurre cuando.
El desplazamiento máximo para el cual se produce el torque máximo es:
Y por lo tanto el torque máximo queda expresado como (con m1 = 3):
Observando el circuito equivalente se obtiene la corriente del estator, tal como se muestra en la ecuaciónsiguiente:
2.− ¿Por qué la corriente departida es alta . ¿Cómo se la puede disminuir en motores de rotor bobinadoy jaula de ardilla?
−Al igual que el transformador, el motor de inducción también requiere unos amper−vuelta para ser capaz deproducir una f.e.m. en el rotor. En este transformador estos no son demasiados ya que el circuito magnéticoesta acoplado por el núcleo, con la cual la corriente de excitación es baja, en cambio en el motor de inducciónel acoplamiento magnético se realiza a través del aire (entrehierro que existe entre estator y el rotor). Lasamper−vueltas magnetizantes son muy grandes, lo que supone un valor relativamente alto de Io (corriente departida).
Esta alta corriente de partida se puede disminuir en los motores de rotor bobinados insertando a través de los
9

anillos del rotor una impedancia o una fuente de tensión al circuito del rotor. Con esto se logra disminuir enparte la corriente de partida, una vez que el motor esta en movimiento se rebaja las impedancias hasta ceropara un funcionamiento normal.
−Para un motor de jaula de ardilla, la corriente de arranque es la misma que la corriente de cortocircuito.Cuando arranca este motor toma, en principio su corriente de motor frenado de la línea. A medida queaumenta su velocidad y se aproximan su condición de carga, la corriente llega al punto que corresponde a lacondición de carga. La variación de corriente y el par motor, son independiente del par motor de oposición dela carga.
Se logra disminuir esta corriente de partida mediante un diseño especial de la sección de las barras del rotor,diseño que exagera el efecto de las corrientes parásitas, produciendo un incremento de la resistencia efectivadurante los arranques (al ser alta la frecuencia de corrientes secundarias) y dando una resistencia baja a lavelocidad de funcionamiento. El uso de barras de sección rectangular, siempre y cuando tengan profundidadsuficiente como para aumentar el efecto de las corrientes parásitas, resulta ventajoso frente a la seccióncuadrada o redonda. En algunas ocasiones, y con el fin de lograr alguna característica especial, se emplean enel rotor dos y hasta tres conjuntos concéntricos de barras.
Otras formas de controlar la corriente de partida es a través de:
Alimentación con tensión reducida:
Al disminuir la tensión en la partida disminuye automáticamente la corriente de partida.
Variadores de frecuencia:
Variando la frecuencia se puede variar el número de polos de la maquina.
3.− Si el rendimiento del motor es
Identificar todas las componentes de potencia y pérdidas, donde
Ppérdida = Pentrada − Psalida
Se tiene que:
Pin − Pout = Ppérdidas
Pin − Pout = Pcue + Ph+f + Pcur + Pf+v + Pferot
Donde:
Pin : Potencia de entrada.
Pout : Potencia de salida.
Pcue : Pérdidas en el cobre del estator.
Ph+f : Pérdidas en el hierro y flujo principal.
Pcur : Pérdidas en cubre del rotor.
10

Pf+v : Pérdidas por fricción y ventilación.
Pferot : Pérdidas en el hierro del rotor.
Las primeras pérdidas que ocurren en la maquina son en el embobinado del estator. Enseguida, ocurrenperdidas por histéresis y por corrientes parásitas en el estator. La potencia en este punto se traslada al rotor dela maquina a través del entrehierro entre el estator y el rotor, una parte de ella se pierde en el cobre del rotor yel resto se convierte de eléctrica a mecánica. Por último las pérdidas por fricción se restan. La potencia quequeda es la potencia de salida.
4.− ¿Por qué el rendimiento del motor varía si se modifica la carga o el voltaje
aplicado?
El rendimiento del motor de inducción viene dado por:
Al variar o modificar (aumentando) la carga su deslizamiento crece y la velocidad disminuye, como estaúltima decrece, aumenta al movimiento relativo, se produce un mayor voltaje en el rotor, lo que a su vezproduce una mayor corriente en el rotor por lo cual aumenta la pérdida en el cobre del rotor, además laspérdidas por fricción, con esto la Psalida variará y debido que el rendimiento depende de esta variable tambiénvariará.
5.− Explique por qué el factor de potencia en el motor varía con la velocidad.
¿Qué comportamiento tiene a velocidad igual a cero y a velocidad nominal?
La impedancia del rotor es:
Z2 = (R2/S) + jX2
La cual se ve afectada por el factor S de desplazamiento, lo que afecta en consecuencia a la impedancia totaldel circuito. Esto influye en el ángulo de desfase entre la corriente del estator y el voltaje de fase.
Como el factor de desplazamiento esta definido por:
S = ns − n
ns
Donde:
ns : Velocidad del campo magnético (sincronía).
n : Velocidad mecánica del eje del rotor.
A velocidades pequeñas el factor s es cercano a la unidad con lo cual el ángulo de desfase y el factor depotencia es pequeño, a medida que aumenta la velocidad el desplazamiento se hace más pequeño, con estodisminuye el ángulo y aumenta el factor de potencia.
Cuando la velocidad es igual a cero el motor de inducción se comporta como un transformador ya que lafrecuencia del estator es igual a la frecuencia del rotor.
11

A velocidad nominal esta es cercana a la de sincronismo, pero no igual, con esto S es muy pequeño con locual el factor de potencia a velocidad nominal es cercano a uno, lo que quiere decir, que la parte inductiva delmotor se hace pequeña.
V. DESARROLLO EXPERIMENTAL.
Dibuje el circuito práctico para determinar el torque de partida, incluyendo instrumentos y límites decorrientes permitidas.
•
Determine el torque de partida para los motores de rotor bobinado ó jaula de ardilla, por el método deldinamómetro. En el caso del motor tipo rotor bobinado utilice diferentes valores de resistencia en el rotor.
•
Para el método de jaula de ardilla se utilizo una fuente trifásica al 75% de su voltaje máximo, y encendiendo yapagando el interruptor de energizado muy rápido.
Se midió el torque con una balanza entregando un valor igual a 2.6 Kg.
12

Dibuje el circuito práctico para determinar la característica torque−velocidad. Indique para carga nominal lamagnitud de corriente de estator y de torque.
•
Determinar la característica torque−velocidad para los motores de rotor bobinado ó jaula de ardilla,conectando una carga al eje. Considere dos casos:
•
Carga variable y voltaje aplicado constante.•
Para una carga variable desde 0 hasta su máximo de trabajo, proveniente de un banco de resistencias, losvalores obtenidos son:
Motor Generador
13

Carga Ve [V] Fase 1Ie [A] Fase1
Pe [KW]Fase 1
Vs [V] Is IcTorque[Kg]
0 200.9 3.20 0.31 100.94 6.1 0.72 0.490
200.6 3.25 0.35 97.7 8.8 0.70 0.900
200.5 3.50 0.41 96.2 10.1 0.70 1.270
200.5 3.56 0.46 94.1 12.0 0.69 1.620
200.3 3.76 0.52 91.7 14.0 0.68 2.000
200.1 3.96 0.57 89.1 16.0 0.67 2.420
Donde: Ve: voltaje de entrada constante
Ie: Corriente de Entrada
Pe: Potencia de Entrada
Vs: Voltaje de Salida
Is: Corriente de Salida
Ic: Corriente de Campo
Voltaje variable y carga constante.•
Motor Generador
Donde: Ve: voltaje de entrada constante
Ie: Corriente de Entrada
Pe: Potencia de Entrada
Vs: Voltaje de Salida
Is: Corriente de Salida
Ic: Corriente de Campo
Dibuje el circuito práctico para determinar el rendimiento, incluyendo instrumentos.•
14

Determine el rendimiento del motor y el factor de potencia para carga variable.•
Los datos de la tabla se deberán multiplicar por 3, debido a que se tomaron los datos de solo una fase.
Datos obtenidos para un motor conectado a un generador sin conexión
Voltaje 200.4 [V]
Potencia 0.17 [KW]
Potencia Aparente 0.56 [KVA]
Potencia Reactiva 0.54 [KVAR]
Factor de Potencia 0.28
Desplazamiento de F.P. (Cos�) 0.28
Frecuencia 50.00 [Hz]
Datos obtenidos para un motor solo (sin generador conectado, sin carga):
Voltaje 200.8 [V]
15

Potencia Activa 0.14 [KW]
Potencia Aparente 0.57 [KVA]
Potencia Reactiva 0.56 [KVAR]
Factor de Potencia 0.24
Desplazamiento de F.P. (Cos�) 0.24
Frecuencia 50.00 [Hz]
VI. MATERIALES E INTRUMENTOS.
.
Tacómetro.• 2 Wattmetro.• Power Quality Analyzer Fluke 43• 3 Amperímetros.• 1 Amperímetro de tenaza.• Un freno Prony.• Manual Electrolab.• 2 multitester.• Un motor de Inducción Trifásico Rotor Bobinado.• Un motor de Inducción Trifásico Rotor Jaula Ardilla.•
VII. CONCLUSION.
El torque de partida en el motor de rotor bobinado puede ser controlado mediante la resistencia en elrotor, es así como a mayor resistencia del rotor, menor será el torque de partida
•
En ambos motores, al aplicar un voltaje constante, el torque varía proporcionalmente con la velocidadal variar la carga en el motor desde el vacío hasta plena carga.
•
En el motor de rotor bobinado, en la zona cercana al voltaje nominal, se observa que el torque nosufre mayores variaciones al variar el voltaje manteniendo la carga constante.
•
La velocidad del motor jaula de ardilla con respecto al torque responde de forma proporcional a lavariación de voltaje a carga constante
•
En ambos tipos de motores se observa que el rendimiento de estos aumenta al incrementar la cargasobrepasando el 60 % de rendimiento, se puede observar que la potencia eléctrica de la red se pierdeen el mismo motor al cuando este tiene poca carga
•
En ambos motores el factor de potencia tiende a aumentar al aplicar mas carga al motor•
VIII. BIBLIOGRAFIA.
Apuntes de Cátedra, Prof. Víctor Fuentes.•
15
16

17