
Parcial IV
19
UNIVERSIDAD DE ORIENTE NUCLEI DE ANZOATEGUI ESCUELA DE INGENIERIA Y CIENCIAS APLICADAS DEPARTAMENTO DE MECANICA Prof. Antonio Franco MECANISMOS. PERÍODO II-2015 PARCIAL IV APELLIDOS Y NOMBRES:____________________________CÉDULA:______________ EL EXAMEN PARCIAL CONSTA DE TRES PROBLEMAS CON EL VALOR DE PUNTOS INDICADO EN CADA UNO. A CONTINUACIÓN SE TIENEN VARIOS PROBLEMAS Y AL FINAL SE LES INDICA CUALES DE ELLOS LES TOCA A CADA UNO DE USTEDES DE ACUERDO AL TERMINAL DE SU NÚMERO DE CÉDULA. 1.- Para el mecanismo mostrado en la figura 1, construir el polígono de aceleraciones correspondiente. Considerar la velocidad angular del eslabón 2 igual a 100 rad/seg en sentido indicado y la aceleración angular del mismo igual a 3700 rad/seg 2 en el sentido antihorario. La longitud del eslabón 2 es de 6,50 cm. Los puntos K,B,P y O 8 , presentan contacto de rodadura pura;
-
Upload
angela-centofanti-rodriguez -
Category
Documents
-
view
213 -
download
0
description
jk
Transcript of Parcial IV

UNIVERSIDAD DE ORIENTE
NUCLEI DE ANZOATEGUI
ESCUELA DE INGENIERIA Y CIENCIAS APLICADAS
DEPARTAMENTO DE MECANICA
Prof. Antonio Franco
MECANISMOS. PERÍODO II-2015
PARCIAL IV
APELLIDOS Y NOMBRES:____________________________CÉDULA:______________
EL EXAMEN PARCIAL CONSTA DE TRES PROBLEMAS CON EL VALOR DE
PUNTOS INDICADO EN CADA UNO. A CONTINUACIÓN SE TIENEN VARIOS
PROBLEMAS Y AL FINAL SE LES INDICA CUALES DE ELLOS LES TOCA A CADA
UNO DE USTEDES DE ACUERDO AL TERMINAL DE SU NÚMERO DE CÉDULA.
1.- Para el mecanismo mostrado en la figura 1, construir el polígono de aceleraciones
correspondiente. Considerar la velocidad angular del eslabón 2 igual a 100 rad/seg en
sentido indicado y la aceleración angular del mismo igual a 3700 rad/seg2 en el sentido
antihorario. La longitud del eslabón 2 es de 6,50 cm. Los puntos K,B,P y O8, presentan
contacto de rodadura pura; mientras que los puntos J e I, presentan contacto de
deslizamiento. El eslabón 8 tiene una velocidad angular igual a 160 rad/seg en el
sentido indicado y constante; siendo la distancia O8G de 4 cm. Encontrar las
magnitudes de las aceleraciones absolutas graficadas para cada punto señalado.
Mostrar en el polígono las imágenes de los eslabones 3,4,5 y 8. Usar una escala de
velocidades igual a 110 (cm/seg)/cm y una escala de aceleraciones igual a 10000
(cm/seg2)/cm. Encontrar α3, α4, α5 y α8. (valor 4.0 ptos.).

Figura 1

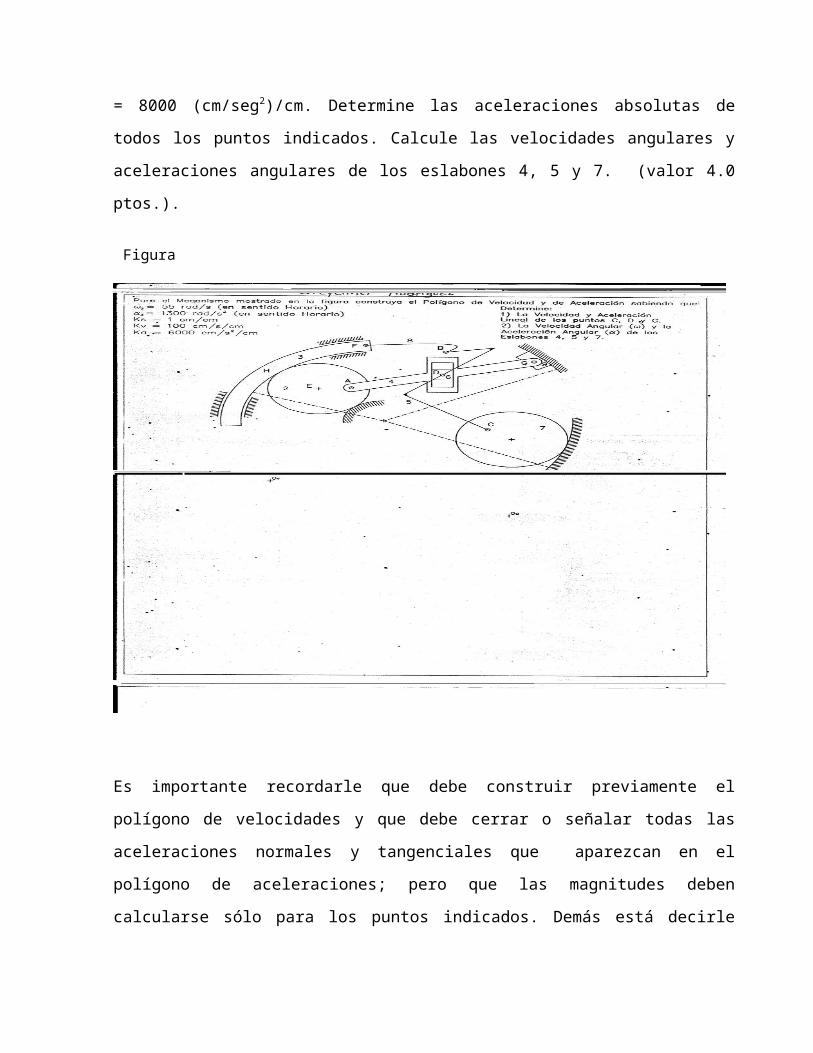
2.- Para el mecanismo mostrado en la figura 2, construir el polígono de aceleraciones
correspondiente. Se sabe que la velocidad absoluta del punto A es igual a 550 cm/seg
en la dirección indicada y su aceleración tangencial es de 10000 cm/seg2 en el mismo
sentido. Determinar las magnitudes de todas las aceleraciones absolutas señaladas en
el mecanismo. Calcule las velocidades angulares de los eslabones 6, 11 y 9; así como
también sus aceleraciones angulares. Muestre las imágenes correspondientes de
figuras geométricas que aparezcan en el mecanismo. Considere un Kv de 100
(cm/*seg)/cm y un Ka de 9000 (cm/seg2)/cm. (valor 4.0 ptos.).
Figura 2
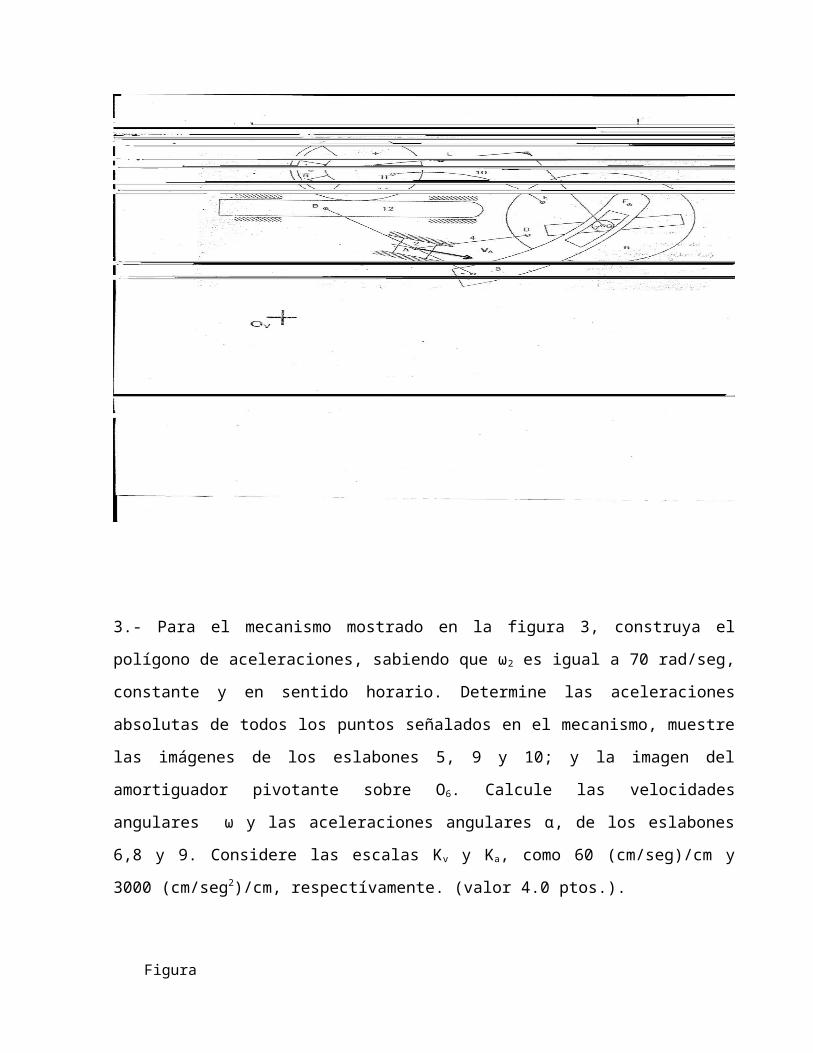
3.- Para el mecanismo mostrado en la figura 3, construya el polígono de aceleraciones,
sabiendo que ω2 es igual a 70 rad/seg, constante y en sentido horario. Determine las
aceleraciones absolutas de todos los puntos señalados en el mecanismo, muestre las
imágenes de los eslabones 5, 9 y 10; y la imagen del amortiguador pivotante sobre O6.
Calcule las velocidades angulares ω y las aceleraciones angulares α, de los eslabones
6,8 y 9. Considere las escalas Kv y Ka, como 60 (cm/seg)/cm y 3000 (cm/seg2)/cm,
respectívamente. (valor 4.0 ptos.).
Figura 3

4.- En el mecanismo de la figura 4, los puntos P Q, R y X tienen contacto de rodadura
pura; mientras que el punto A presenta contacto de deslizamiento. Construya el
polígono de aceleraciones con todos los puntos indicados, teniendo como datos los
siguientes: ω2 = 200 rad/seg (antihorario); α2 = 3500 rad/seg2 (antihorario); Kv = 85
(cm/seg)/cm; Ka = 9800 (cm/seg2)/cm. Determine las aceleraciones absolutas de todos
a los puntos indicados. Muestre las imágenes de los eslabones 2, 7 y 9. Calcule las
aceleraciones angulares de los eslabones 5, 6 y 8. (valor 4.0 ptos.).
Figura 4

5.- Para el mecanismo mostrado en la figura 5 construya el polígono de aceleraciones
sabiendo que: ω3 = 60 rad/seg (horario); α3 = 1800 rad/seg2 (horario); Kv = 120
(cm/seg)/cm; Ka = 8000 (cm/seg2)/cm. Determine las aceleraciones absolutas de todos
los puntos indicados. Calcule las velocidades angulares y aceleraciones angulares de
los eslabones 4, 5 y 7. (valor 4.0 ptos.).
Es importante recordarle que debe construir previamente el polígono de velocidades y
que debe cerrar o señalar todas las aceleraciones normales y tangenciales que
aparezcan en el polígono de aceleraciones; pero que las magnitudes deben calcularse
sólo para los puntos indicados. Demás está decirle que debe trabajar con precisión y
limpio, evitando borrones y tachaduras. Utilice papel en formato doble carta o similar si
es necesario; ya que no se garantiza que los polígonos queden ambos dentro de una
hoja carta normal. Por lo tanto usted debe ubicar los polos a su conveniencia.
Figura 5
6.- Construir el perfil de una leva de cara plana articulada para un seguidor de altura 5
cm y diagrama cinemático indicado. El diagrama cinemático establece que sube 90°
con movimiento armónico simple la altura completa y se mantiene en reposo durante
60°; luego baja hasta la mitad de la altura con movimiento parabólico durante 90°.
Continúa bajando hasta su punto de partida con velocidad constante durante 120°.
Giro de la leva 1800 rpm levógiro. (valor 3.0 ptos.).
7.- Construir el perfil de una leva de rodillo articulado para un seguidor de altura 6 cm y
diagrama cinemático indicado. El diagrama cinemático establece que sube 120° con
movimiento parabólico la altura completa y se mantiene en reposo durante 30°; luego
baja hasta la mitad de la altura con movimiento armónico simple durante 120°.
Continúa bajando hasta su punto de partida con movimiento parabólico durante 90°.
Giro de la leva 1200 rpm destrógiro. (valor 3.0 ptos.).
8.- Construir el perfil de una leva de cuchilla simple excéntrica 5 cm a la izquierda para
un seguidor de altura 5 cm y diagrama cinemático indicado. El diagrama cinemático
establece que sube 180° con velocidad constante la altura completa y se mantiene en
reposo durante 120°; luego baja hasta su punto de partida con movimiento parabólico
durante los restantes 60°. Giro de la leva 975 rpm destrógiro. (valor 3.0 ptos.).
9.- Construir el perfil de una leva de rodillo excéntrico 4 cm a la derecha para un
seguidor de altura 6 cm y diagrama cinemático indicado. El diagrama cinemático
establece que sube 60° con velocidad constante la mitad de la altura, continúa
subiendo hasta el máximo durante 90° con velocidad constante y se mantiene en
reposo durante 120°; luego baja hasta su punto de partida con movimiento parabólico
durante los restantes 90°. Giro de la leva 1750 rpm levógiro. (valor 3.0 ptos.).
10.- Construir el perfil de una leva de cara plana excéntrica 5 cm a la izquierda para un
seguidor de altura 6 cm y diagrama cinemático indicado. El diagrama cinemático
establece que sube 60° con velocidad constante la altura completa y se mantiene en
reposo durante 120°; luego baja hasta la mitad de la altura con movimiento armónico
simple durante 90°. Finalmente retorna a su punto de partida con velocidad constante
durante los restantes 90°.Giro de la leva 1975 rpm destrógiro. (valor 3.0 ptos.).
Los diámetros de los rodillos, tanto excéntricos como articulados usted los asume; así
como el ancho de las cara planas. Trabaje en lo posible en papel milimetrado formato
doble carta o similar para mayor exactitud y comodidad.
11.- Para el brazo pitman colocado sobre la plataforma del camión mostrado en la
figura 6, elabore el eslabonamiento correspondiente y construya su polígono de fuerzas
actuantes sobre el mismo. ( valor 3.0 ptos.).

12.- Para la retroexcavadora de la figura 7, elaborar el eslabonamiento correspondiente
y construir el polígono de fuerzas actuantes en el mismo. ( valor 3.0 ptos.).
Figura 6
W = 1800 kg

Figura 7
F = 8 KN

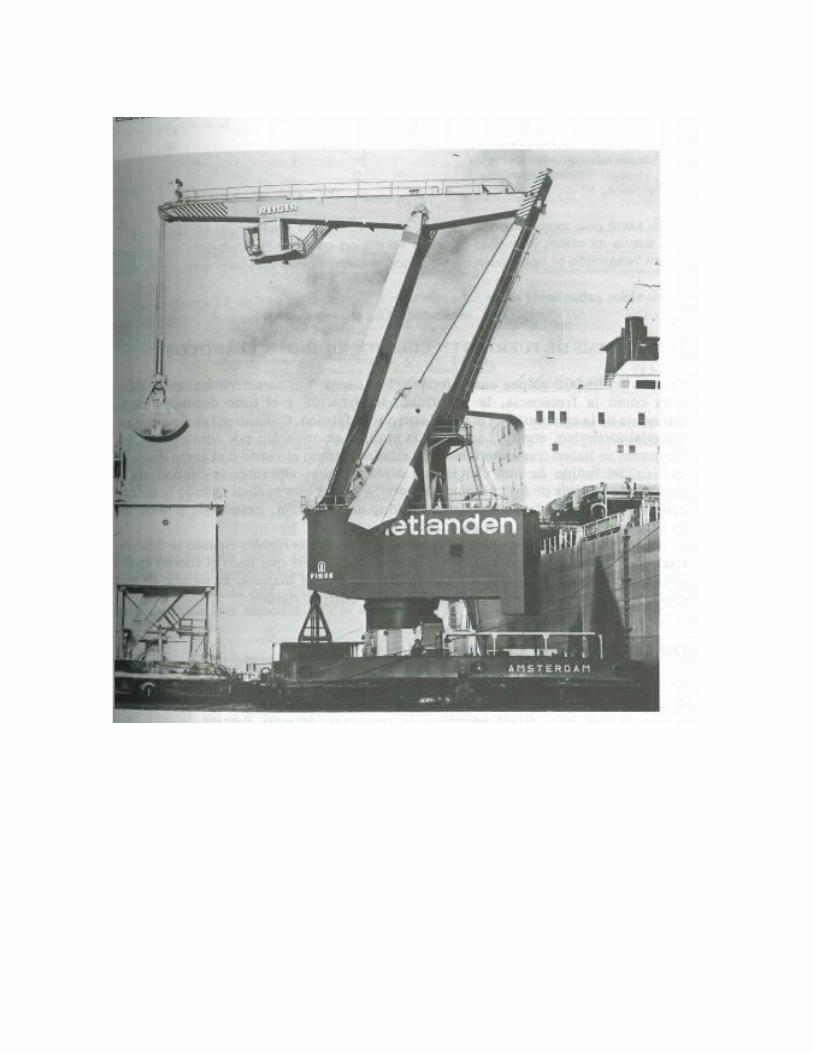
13.- Construir el polígono de fuerzas para la grúa mostrada en la figura 8 y cuyo
esquema de eslabonamiento se muestra con el enunciado a continuación figura 9.
( valor 3.0 ptos.).
Figura 8

Figura 9

14.- Para e cargador o payloder de la figura 10, elaborar el eslabonamiento
correspondiente y construir el polígono de fuerzas actuantes en el mismo. ( valor 3.0
ptos.).
F = 25 KN
Figura 10
15.- Construir el polígono de fuerzas para la limadora mostrada en la figura 11 y cuyo
esquema de eslabonamiento se muestra al lado de la figura. ( valor 3.0 ptos.).
Para cada polígono de fuerza sencillamente debe establecer las fuerzas de inercia
propia de cada eslabón y las fuerzas aplicadas que se indican en cada caso; además
de las fuerzas producto de la aplicación de una de las leyes de Newton; es decir,
F = m.a. Respecto a las dimensiones que hagan falta de algunas de las máquinas
Figura 11
F = 3,5 KN

asignadas, usted podrá asumirlas bajo razonamiento lógico y real a través de revisión
bibliográfica y contacto directo. Así mismo para las velocidades de inicio de movimiento
en cada máquina, asuma una velocidad angular inicial ω2 = 160 rad/seg y la longitud
del eslabón motor, establézcalo uusted mismo. Considere en todos ,los casos que ω2
es constante.


















