PLAN DE RECUPERACIÓN DE TECNOLOGÍA INDUSTRIAL … fileAdemás debe comentar todas las lineas del...
12
PLAN DE RECUPERACIÓN DE TECNOLOGÍA INDUSTRIAL CURSO 2017 2018 PRIMER TRIMESTRE 1º BACH C Para recuperar el primer trimestre debes realizar 20 ejercicios a elegir de las relaciones de ejercicios que figurar a continuación. Para preparar estos ejercicios dispones de una hora de tutoría personalizada los viernes de 14,00 a 15,00. En caso de dudas o consultas puedes concertar cita con el profesor. Se trata de los temas vistos este primer trimestre: • Arduino ◦ Variables simples ◦ Variables de mas de un byte ◦ Delay ◦ Componentes de entrada ◦ Componentes de salida ◦ Control analógico ◦ Control Digital ◦ Servomotores ◦ Sensores • Electrónica Digital ◦ Tabla de verdad ◦ Función lógica ◦ Operaciones básicas ◦ Sistemas de numeración ◦ Algebra de Boole ◦ Simplificación de funciones ◦ Biestables Además debe comentar todas las lineas del programa de arduino que se encentra al final de estos apuntes. Se realizará un examen para comprobar la realización de estas actividades. La fecha se decidirá con el profesor de la asignatura.
Transcript of PLAN DE RECUPERACIÓN DE TECNOLOGÍA INDUSTRIAL … fileAdemás debe comentar todas las lineas del...
PLAN DE RECUPERACIÓN DE TECNOLOGÍA INDUSTRIAL CURSO 2017 2018PRIMER TRIMESTRE 1º BACH C
Para recuperar el primer trimestre debes realizar 20 ejercicios a elegir de las relaciones de ejerciciosque figurar a continuación. Para preparar estos ejercicios dispones de una hora de tutoría personalizada los viernes de 14,00 a 15,00. En caso de dudas o consultas puedes concertar cita con el profesor.
Se trata de los temas vistos este primer trimestre:
• Arduino◦ Variables simples◦ Variables de mas de un byte◦ Delay◦ Componentes de entrada◦ Componentes de salida◦ Control analógico◦ Control Digital◦ Servomotores◦ Sensores
• Electrónica Digital◦ Tabla de verdad◦ Función lógica◦ Operaciones básicas◦ Sistemas de numeración◦ Algebra de Boole◦ Simplificación de funciones◦ Biestables
Además debe comentar todas las lineas del programa de arduino que se encentra al final de estos apuntes.
Se realizará un examen para comprobar la realización de estas actividades. La fecha se decidirá conel profesor de la asignatura.

Http://www.elegoo.com
1
Lección 5 Línea de seguimiento de coches

Http://www.elegoo.com
2
Puntos de la sección
En esta lección, aprenderemos a controlar el coche para que se mueva a lo largo de una pista.
Conocimiento de las piezas:
Aprenda a usar el módulo de seguimiento de línea
Aprenda los principios de seguimiento de línea
Aprenda a implementar el seguimiento de líneas mediante la programación
Preparación:
Un coche (equipado con batería)
Un cable USB
Módulos de seguimiento de tres líneas
Un rollo de cinta negra

Http://www.elegoo.com
3
Ⅰ. Haciendo la pista
Materiales: cinta adhesiva eléctrica (cinta negra)
En primer lugar, tenemos que hacer una pista por nuestra cuenta. Podemos hacer un circuito pegando
cinta negra en un papel adecuado o en el suelo. Antes de pegar, puede dibujar una pista con un
bolígrafo y luego pegar con cinta adhesiva eléctrica. Preste atención a que la esquina sea lo más suave
posible. Porque el coche saldrá de la línea si el ángulo es demasiado pequeño, pero si quieres hacerlo
más difícil, puedes hacerlo pequeño. El tamaño de la pista no es generalmente más pequeño que 40 *
60 cm.

Http://www.elegoo.com
4
Ⅱ. Conectar módulos y depurar
El componente apuntado es el potenciómetro. Puede ajustar la sensibilidad del módulo de
seguimiento de línea cambiando su valor de resistencia.

Http://www.elegoo.com
5
Ⅲ. Subir programa
Después de hacer la pista y los módulos de conexión, sólo tiene que cargar el programa en la placa
controladora UNO.
El código es como seguidor:
int in1=6;
int in2=7;
int in3=8;
int in4=9;
int ENA=5;
int ENB=11;
int ABS=115;
void _mForward()
{
analogWrite(ENA,ABS);
analogWrite(ENB,ABS);
digitalWrite(in1,HIGH);//digital output
digitalWrite(in2,LOW);
digitalWrite(in3,LOW);
digitalWrite(in4,HIGH);
Serial.println("go forward!");
}
void _mBack()
{
analogWrite(ENA,ABS);
analogWrite(ENB,ABS);
digitalWrite(in1,LOW);
digitalWrite(in2,HIGH);
digitalWrite(in3,HIGH);
digitalWrite(in4,LOW);
Serial.println("go back!");

Http://www.elegoo.com
6
}
void _mleft()
{
analogWrite(ENA,ABS);
analogWrite(ENB,ABS);
digitalWrite(in1,HIGH);
digitalWrite(in2,LOW);
digitalWrite(in3,HIGH);
digitalWrite(in4,LOW);
Serial.println("go left!");
}
void _mright()
{
analogWrite(ENA,ABS);
analogWrite(ENB,ABS);
digitalWrite(in1,LOW);
digitalWrite(in2,HIGH);
digitalWrite(in3,LOW);
digitalWrite(in4,HIGH);
Serial.println("go right!");
}
void _mStop()
{
digitalWrite(ENA,LOW);
digitalWrite(ENB,LOW);
Serial.println("Stop!");
}
void setup()
{
Serial.begin(9600);
Http://www.elegoo.com
7
}
void loop() {
int num1,num2,num3;
num1=digitalRead(10);
num2=digitalRead(4);
num3=digitalRead(2);
if((num1==0)&&num2&&num3)
{
_mleft(); //The sensor detected that right car turn left immediately when it meets
black line
delay(2);
while(1){
num2=digitalRead(2); //Cycle to judge degree of intermediate sensor,
if(num2==1)
{ _mleft(); //If num2==1 does not go to the middle position, continue
to turn left.
delay(2);}
else
break; //Detection of num2==0 instructions turned over, out of the
loop, detection of three sensors’ statusand then make appropriate action
} //The following and so on
}
else if(num2&&num1&&(num3==0))
{
_mright();
delay(2);
while(1)
{
num2=digitalRead(2);
if(num2==1){
_mright();

Http://www.elegoo.com
8
delay(2);}
else
break;
}
}
else
{
_mForward();
delay(2);
}
}
Abre el fichero Line_Tracking_Car /Line_Tracking_Car.ino y cargaa el programa en la placa
controladora UNO. Después de desconectar el automóvil al ordenador, puede encender el interruptor
de encendido y poner el coche en la pista. Entonces el coche seguirá las líneas. Si encuentra que no
puede moverse como esperaba, ajuste el potenciómetro en el módulo de seguimiento de línea.
Http://www.elegoo.com
9
Ⅳ. Introducción inicial
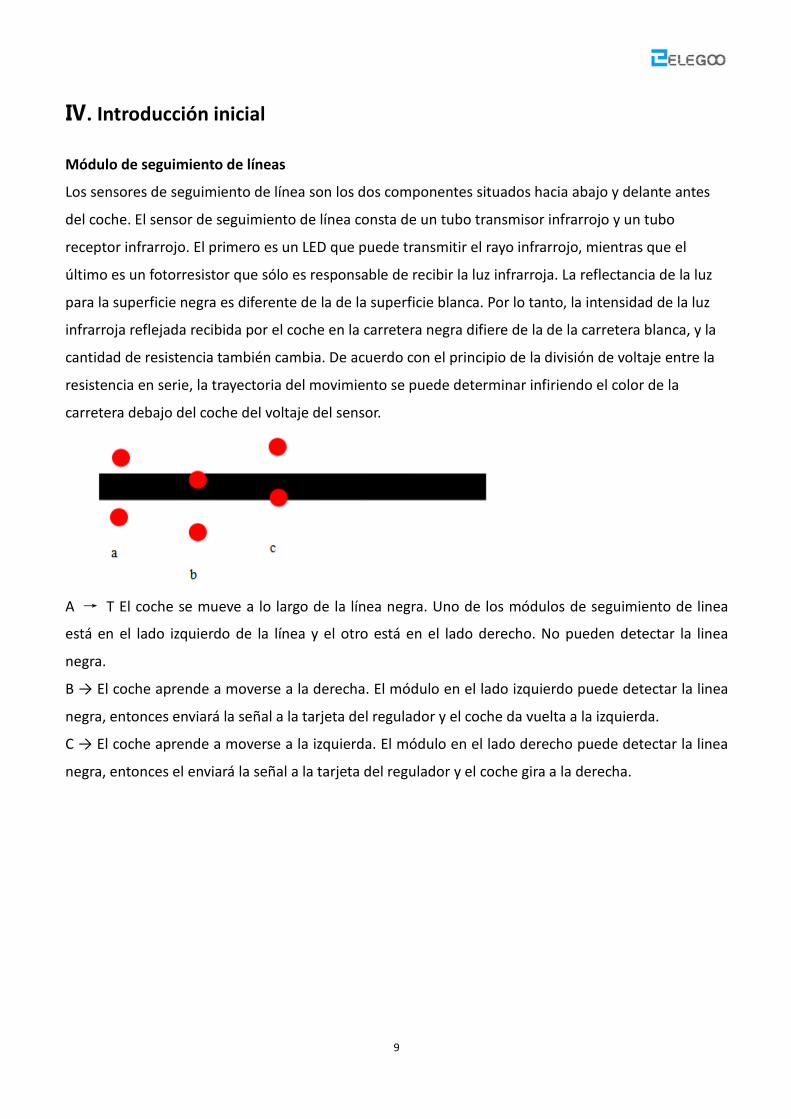
Módulo de seguimiento de líneas
Los sensores de seguimiento de línea son los dos componentes situados hacia abajo y delante antes
del coche. El sensor de seguimiento de línea consta de un tubo transmisor infrarrojo y un tubo
receptor infrarrojo. El primero es un LED que puede transmitir el rayo infrarrojo, mientras que el
último es un fotorresistor que sólo es responsable de recibir la luz infrarroja. La reflectancia de la luz
para la superficie negra es diferente de la de la superficie blanca. Por lo tanto, la intensidad de la luz
infrarroja reflejada recibida por el coche en la carretera negra difiere de la de la carretera blanca, y la
cantidad de resistencia también cambia. De acuerdo con el principio de la división de voltaje entre la
resistencia en serie, la trayectoria del movimiento se puede determinar infiriendo el color de la
carretera debajo del coche del voltaje del sensor.
A → T El coche se mueve a lo largo de la línea negra. Uno de los módulos de seguimiento de linea
está en el lado izquierdo de la línea y el otro está en el lado derecho. No pueden detectar la linea
negra.
B → El coche aprende a moverse a la derecha. El módulo en el lado izquierdo puede detectar la linea
negra, entonces enviará la señal a la tarjeta del regulador y el coche da vuelta a la izquierda.
C → El coche aprende a moverse a la izquierda. El módulo en el lado derecho puede detectar la linea
negra, entonces el enviará la señal a la tarjeta del regulador y el coche gira a la derecha.
Http://www.elegoo.com
10
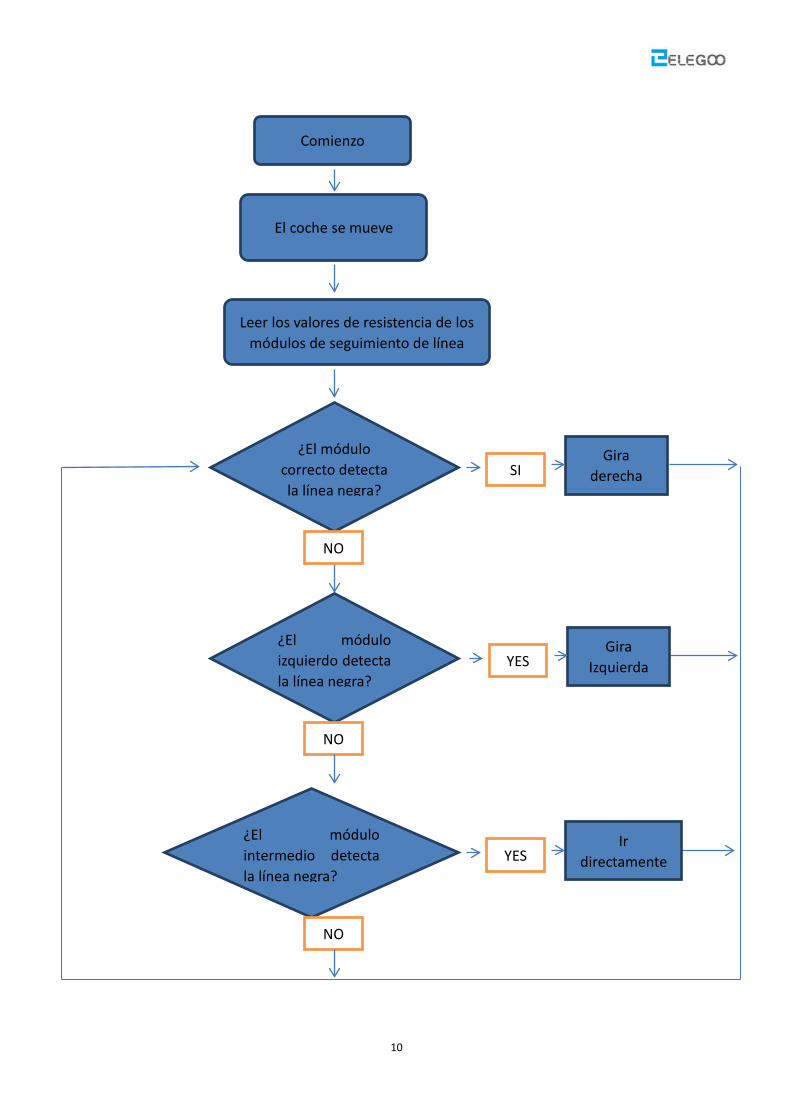
Comienzo
Leer los valores de resistencia de los módulos de seguimiento de línea
¿El módulo correcto detecta la línea negra?
Gira derecha SI
El coche se mueve
NO
¿El módulo izquierdo detecta la línea negra?
NO
¿El módulo intermedio detecta la línea negra?
Gira Izquierda YES
Ir directamente YES
NO
Http://www.elegoo.com
11
Desde arriba, podemos ver el principio de la línea de seguimiento del coche. Después del arranque del
coche, el módulo de seguimiento de línea sólo tiene que detectar la línea negra en la superficie de la
carretera, hacer la acción correspondiente de acuerdo con el programa.
Éste es un diagrama simple del algoritmo de la línea del coche que sigue el programa. Hay muchos
algoritmos más complejos como PID. Así que después de hacer realidad la función de seguimiento de
línea, puede aprender más algoritmos de control de automóviles por su cuenta.
Pequeños consejos
(1) La parte de flexión de la línea debe ser lo más suave posible. Si el radio de las curvas es demasiado
pequeño, es muy probable que el coche se mueva más allá de la pista.
(2) La escena de seguimiento de línea se puede hacer con la cinta en blanco y negro o el papel de
cualquier color que se distinga de la ruta.
(3) Además de la línea de seguimiento, podemos estirar la imaginación para desarrollar otros
programas basados en los principios de seguimiento de línea, como los que confinan el coche dentro
de una región independientemente de su movimiento.