Plataforma m ovil robotizada para cultivos de hortalizas a ...
56
Plataforma m´ ovil robotizada para cultivos de hortalizas a peque˜ na escala Juan David Guayara Salcedo Faculta de Ingenier´ ıa Programa de Ingenier´ ıaElectr´onica Ibagu´ e, 2019
Transcript of Plataforma m ovil robotizada para cultivos de hortalizas a ...

Plataforma movil robotizada para cultivos dehortalizas a pequena escala
Juan David Guayara Salcedo
Faculta de Ingenierıa
Programa de Ingenierıa Electronica
Ibague, 2019

Plataforma movil robotizada para cultivos dehortalizas a pequena escala
Juan David Guayara Salcedo
Trabajo de grado que se presenta como requisito parcial para optar al tıtulo de:
Ingeniero Electronico
Director:
Ing Jorge Andres Garcia Vanegas
Profesor Universidad de Ibague
Faculta de Ingenierıa
Programa de Ingenierıa Electronica
Ibague, 2019

Dedico este trabajo a la persona mas importante en mi vida,mi progenitora Edna Margarita Guayara Salcedo.
III

IV Plataforma movil robotizada para cultivos de hortalizas a pequena escala
IV Guayara Juan David

Plataforma movil robotizada para cultivos de hortalizas a pequena escala
Agradecimientos
Agradezco a Andres Garcıa Vanegas, quien me guio de manera cordial y supo brindarme suconocimiento. A mi companero Helman Daniel Zambrano Cortes, por su apoyo incondicionalen la carrera y como amigo. A todos los companeros del semillero MEC-AUTRONIC de laUniversidad de Ibague, por el apoyo en cada uno de los inconvenientes presentados duranteel desarrollo de la investigacion, especialmente al estudiante Brhayan Liberato Tafur.
Asistencia de investigacion.Programa de ingenierıa electronica, 2019 V

VI Plataforma movil robotizada para cultivos de hortalizas a pequena escala
Resumen
El presente Trabajo de Grado trata de una plataforma movil robotizada para la prueba deun efector final que permitan la siembra, riego y monitoreo de hortalizas en cultivos a pe-quena escala. Se desarrollo un prototipo experimental en el semillero de diseno mecatronico,MEC-AUTRONIC, el cual hace parte del grupo de investigacion D+TEC de la Universidadde Ibague. En el diseno de la plataforma se realizo la seleccion de materiales, para la fabrica-cion de los elementos mecanicos; y la seleccion de componentes electronicos, para el sistemade control y comunicacion. Un diseno detallado del prototipo en 3D se realizo utilizandoSolidworks como herramienta de diseno computacional, junto con simulaciones utilizando elmodulo de Analisis Estatico del complemento de simulacion para evaluar la resistencia dela estructura desarrollada. Finalmente, se realizaron pruebas experimentales para verificarel funcionamiento del sistema de locomocion y del efector final. El sistema de locomociones de tipo diferencial con 4 ruedas, cada una con un motorreductor y encoder digital. Elefector final permite la deposicion de 3 a 4 semillas por dosificacion; el sistema riego permitela aspersion de 100 plantas; y el sistema de monitoreo permite el reconocimiento y la tomade imagenes utilizando una camara Web.
Palabras clave: robot movil, agricultura de precision, sistema mecatronico, siem-bra y riego automatizado.
Abstract
The present work of Grade is based on a robotic mobile platform for the test of an end effectorthat allows the sowing, irrigation, and monitoring of vegetables in small-scale crops. It is anexperimental prototype in the seedbed of mechanical design, MEC-AUTRONIC, which is partof the D+TEC research group of the Universidad de Ibague. In the design of the platform,the selection of materials was made, for the manufacture of the mechanical elements; andthe selection of electronic components, for the control and communication system. A detaileddesign of the 3D prototype is used using Solidworks as a computational design tool, alongwith simulations using the Static Analysis module of the simulation complement to evaluatethe strength of the developed structure. Finally, experimental tests were performed to verifythe functioning of the locomotion system and the end effector. The locomotion system is adifferent type with four wheels, each with a gear motor and digital encoder. The final effectorallows the deposition of 3 to 4 seeds per dosage; the irrigation system allows the sprinklingof 100 plants, and the monitoring system allows the recognition and taking of images usinga webcam.
Keywords: mobile robot, precision agriculture, mechatronic system, planting andautomated irrigation.
VI Guayara Juan David

Contenido
Resumen VI
Lista de sımbolos y abreviaturas XV
Introduccion 1
1. Robots moviles terrestres para agricultura 5
1.1. Definicion y conceptos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.1.1. ¿Que es la robotica movil? . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.1.2. Tipos de robots moviles . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.1.3. Sistemas de locomocion . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.2. Plataformas y sistemas desarrollados hasta el momento . . . . . . . . . . . . 7
1.2.1. Design of the mechatronic architecture of an agricultural mobile robot 7
1.2.2. Design and development of manually operated seed planter machine . 8
1.2.3. Agricultural Robot for Automatic Ploughing and Seeding . . . . . . . 9
1.2.4. An Agricultural Robot for Multipurpose Operations in a Greenhouse . 9
1.2.5. Mechanical Design and Development of an Electric Mobile Robot forAgricultural Tasks in Greenhouses . . . . . . . . . . . . . . . . . . . . 10
1.2.6. Robotic Tankette for Intelligent Bioenergy Agriculture: Design, Deve-lopment and Field Tests . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2. Diseno de la plataforma movil SowerBot 11
2.1. Estructura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.1.1. Etapas de diseno de la estructura . . . . . . . . . . . . . . . . . . . . . 15
2.1.2. Estudio de resistencia de la estructura . . . . . . . . . . . . . . . . . . 17
2.2. Sistema de locomocion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.2.1. Piezas que conforman el sistema de locomocion . . . . . . . . . . . . . 20
2.3. Efector-Final para siembra, riego y monitoreo . . . . . . . . . . . . . . . . . . 21
2.3.1. Sistema de siembra . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.3.2. Sistema de riego . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.3.3. Sistema de monitoreo . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.3.4. Diseno externo del Efector-Final . . . . . . . . . . . . . . . . . . . . . 26
3. Fabricacion y construccion de un prototipo 27
3.1. Seleccion de materiales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.1.1. Sistema de locomocion . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.1.2. Estructura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.1.3. Efector-Final . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
VII

VIII Plataforma movil robotizada para cultivos de hortalizas a pequena escala
3.1.4. Sistema de Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 313.2. Impresion 3D, corte laser y mecanizado . . . . . . . . . . . . . . . . . . . . . 32
3.2.1. Impresion 3D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 333.2.2. Corte laser . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 333.2.3. Mecanizado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
3.3. Prototipo real . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4. Pruebas y resultados experimentales 354.1. Experimento 1: Sistema de locomocion . . . . . . . . . . . . . . . . . . . . . . 364.2. Experimento 2: Sistema de siembra . . . . . . . . . . . . . . . . . . . . . . . . 374.3. Experimento 3: Sistema de riego . . . . . . . . . . . . . . . . . . . . . . . . . 384.4. Experimento 4: Sistema de monitoreo . . . . . . . . . . . . . . . . . . . . . . 38
5. Conclusiones y recomendaciones 395.1. Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 405.2. Recomendaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Referencias 41Referencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
VIII Guayara Juan David

Plataforma movil robotizada para cultivos de hortalizas a pequena escala
Indice de tablas
2.1. Caracterısticas principales de las hortalizas que se utilizaran para la siembraen el cultivo a pequena escala . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.1. Fijaciones en acero empleadas en el diseno y construccion del sistema de loco-mocion. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.2. Material en MDF empleadas en el diseno y construccion de las piezas delsistema de locomocion, ver Fig. 2.14 . . . . . . . . . . . . . . . . . . . . . . . 28
3.3. Filamento para impresion 3D empleado en la construccion de las piezas delsistema de locomocion, ver Fig. 2.15 . . . . . . . . . . . . . . . . . . . . . . . 29
3.4. Otros materiales empleados en la construccion del sistema de locomocion. . . 293.5. Fijaciones en acero empleadas en el diseno y construccion de la estructura . . 293.6. Perfiles en aluminio empleados en el diseno y construccion de la estructura . 303.7. Material en MDF empleado para la construccion de las piezas para la estruc-
tura. ver Fig. 2.8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303.8. Filamento para impresion 3D empleado en la construccion de las piezas de la
estructura, ver Fig. 2.7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303.9. Otros materiales empleados en la construccion de la estructura. . . . . . . . . 303.10. Fijaciones en acero empleadas en el diseno y construccion del Efector-Final. . 313.11. Perfiles en aluminio empleados en el diseno y construccion del Efector-Final. . 313.12. Material en MDF empleadas en el diseno y construccion del Efector-Final, ver
Fig. 2.18 y en la Fig. 2.25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 313.13. Filamento para impresion 3D empleado para la construccion del Efector-Final,
ver Fig. 2.19, la Fig. 2.22 y la Fig. 2.23. . . . . . . . . . . . . . . . . . . . . . 323.14. Materiales varios empleados en la construccion del sistema del Efector-Final. 323.15. Materiales empleados en la construccion del sistema de control. . . . . . . . . 32
Asistencia de investigacion.Programa de ingenierıa electronica, 2019 IX

X Plataforma movil robotizada para cultivos de hortalizas a pequena escala
X Guayara Juan David
Indice de figuras
1.1. Clasificacion de los robots segun su desplazamiento, a. DOGBOT, b. Tractorde oruga, c. RIPPA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.2. sistemas de locomocion para robot con cintas y ruedas. a. Locomocion dife-rencia, b. Locomocion sıncrona, c. Locomocion triciclo, d. Locomocion Acker-mann, e. Locomocion omnidireccionales. . . . . . . . . . . . . . . . . . . . . . 7
1.3. Estructura mecanica, sistema de traccion y sistema de direccion. . . . . . . . 8
1.4. a. Sistema completo del sistema de siembra, b. Sistema de dosificacion desemillas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.5. Plataforma movil para tareas agrıcolas. . . . . . . . . . . . . . . . . . . . . . 9
1.6. Robot agrıcola para tareas multiproposito en granjas. a. Estructura modular,b. Vision por luz utilizada en el robot para poder desplazarse. . . . . . . . . . 9
1.7. Robot movil para tareas agrıcolas en granjas. a. Vista lateral del robot. b.Vista posterior del robot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.8. Robot movil de campo en la granja UMOE BioEnergy. a. Vista virtual robot.b. Vista real robot. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.1. Vista isometrica del diseno en 3D de estructura en Solidworks. . . . . . . . . 12
2.2. Vista lateral del ancho y alto de caja reductora. Dimensiones externas delefector alto 123 mm, ancho 250 mm, profundidad 250mm. . . . . . . . . . . . 13
2.3. Vista frontal de la distancia de la llanta y estructura respecto al terreno. . . . 14
2.4. Vista isometrica de dimensiones externas de recipiente de agua para el sistemade riego. Alto 100 mm, largo 362 mm. . . . . . . . . . . . . . . . . . . . . . . 14
2.5. Vista lateral de dimensiones externas de la de caja reductora. Ancho 46.30mm,alto 176.03mm. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.6. Vista isometrica de dimensiones externas de la estructura, frente 519 mm,lateral 552 mm y altura 322 mm. . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.7. Vistas isometricas de piezas disenadas para impresion 3D. a. Codo para tresperfiles, b. Codo para cuatro perfiles, c. Codo para cinco perfiles, d. Angulopara perfiles, e. Lamina para perfiles, f. Soporte para caja reductora. . . . . . 16
2.8. Vistas isometricas de piezas disenadas para impresion 3D. a. Codo para tresperfiles, b. Codo para cuatro perfiles, c. Codo para cinco perfiles, d. Angulopara perfiles, e. Lamina para perfiles, f. Soporte para caja reductora. . . . . . 17
2.9. Vista isometrica de enmallado con representacion de fuerzas y sujeciones dela estructura. Sujeciones en verde, carga de 2.5kg en rojo y amarillo, carga de5kg en azul. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.10. Vistas isometrica resultado de las tensiones ejercidas en la por cada una de lascargas en la estructura. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
XI

XII Plataforma movil robotizada para cultivos de hortalizas a pequena escala
2.11. Vistas isometrica resultado de la simulacion realizada a la estructura. Izquierdavalores desplazamiento, derecha valores factor de seguridad. . . . . . . . . . . 19
2.12. Vista lateral y frontal externa del diseno del sistema de locomocion de laplataforma. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.13. Vista explosionada sistema de locomocion. a. Caja de reduccion, b. Acopleen PLA para rin y caja reductora, C. Fijaciones en MDF y acero, d. Llantaantipinchazo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.14. Vistas isometricas de diseno de piezas para corte en MDF. a. Pieza sujecionde acople para caja reductoras, b. Pieza para sujecion de rin, c. Pieza paraesconder cabezas de los tornillos, d. Pieza para sujecion de rin numero 2. . . . 21
2.15. Vistas isometricas de diseno de piezas para impresion 3D. a. Pieza para ro-damientos internos del rin, b. Acople para union de caja reductora con rin yllantas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.16. Vista de mecanismos encontrados para la implementacion en la siembra dela plataforma. a. Mecanismo biela manivela, b. Mecanismo electrobomba, C.Mecanismo pinon cremallera. . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.17. Vista isometrica sistema de siembra. a. Tolva, b. Puente de semillas, c. Pinonpara dosificador de semillas, d. Embudo, e. Pinon principal movimiento rec-tilıneo, f. Servomotor, g. Cremallera, h. Rodamiento lineal, i. Tubo en aluminio,j. Acople manguera para el paso de semillas, k. Mecanismo de abertura de latierra. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.18. Vistas isometricas de diseno de piezas para corte en MDF. a. Pinon principalmovimiento sistema de siembra, b. Cremallera movimiento sistema de siembra,c. Soporte vertical para servomotor, d. Soporte horizontal para servomotor. . 23
2.19. Vistas isometricas de diseno de piezas para impresion 3D. a. Capsula roda-miento para semilla, b. Embudo para semillas, c. Tolva para semillas, d. Pinonpara Capsula de semillas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.20. Vista isometrica sistema de riego. a. Acople de tuberıa para mangueras, b.Electrovalvula, c. Bomba de agua electrica. . . . . . . . . . . . . . . . . . . . 24
2.21. Vista isometrica recipientes para sistema de riego. a. Acople de tuberıa paramangueras, b. Contenedor para agua. . . . . . . . . . . . . . . . . . . . . . . 24
2.22. Vista isometrica diseno de piezas para impresion 3D. a. Acople para direccionde manguera, b. Soporte para electrovalvula. . . . . . . . . . . . . . . . . . . 25
2.23. Vista isometrica de diseno de camara para el sistema de monitoreo y piezapara sujecion de camara en el Efector-Final. . . . . . . . . . . . . . . . . . . . 25
2.24. Vista isometrica de diseno de camara para el sistema de monitoreo y piezapara sujecion de camara en el Efector-Final. . . . . . . . . . . . . . . . . . . . 26
2.25. Vista isometrica de diseno de camara para el sistema de monitoreo y piezapara sujecion de camara en el Efector-Final. . . . . . . . . . . . . . . . . . . . 26
3.1. Vista del prototipo finalizado de la plataforma robotizada para la prueba deEfectores-Finales. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.2. Vista del Efector-Final con cada uno de sus sistemas, sistema de sembrado,sistema de riego y sistema de monitoreo. . . . . . . . . . . . . . . . . . . . . . 34
4.1. Pruebas del sistema de locomocion en campo. . . . . . . . . . . . . . . . . . . 36
4.2. Pruebas realizadas al sistema de locomocion. Trayectoria programada paraprueba en campo del sistema de locomocion. . . . . . . . . . . . . . . . . . . 36
XII Guayara Juan David

Plataforma movil robotizada para cultivos de hortalizas a pequena escala
4.3. Resultados prueba del sistema de siembra. Prueba de siembra en el terreno,medida de distancia de los orificios realizados por el sistema de siembra, dosi-ficacion de semillas en el terreno. . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.4. Resultados y validacion del sistema de riego respecto a la siembra. . . . . . . 384.5. Resultados y validacion del sistema de riego respecto a la siembra. . . . . . . 38
Asistencia de investigacion.Programa de ingenierıa electronica, 2019 XIII

XIV Plataforma movil robotizada para cultivos de hortalizas a pequena escala
XIV Guayara Juan David

Plataforma movil robotizada para cultivos de hortalizas a pequena escala
Lista de sımbolos y abreviaturas
Abreviaturas
Abreviatura Termino
MDF Tablero de fibra de densidad mediaPLA Acido poliacticoABS Acrilonitrilo butadieno estirenoCAD Diseno asistido por computadoraCAE Ingenierıa asistida por computadora
Asistencia de investigacion.Programa de ingenierıa electronica, 2019 XV

Introduccion
En Colombia la tasa de crecimiento poblacional actual es de 0.98 % una cifra elevada consi-derando la escases que existe de alimentos en el paıs, a causa de lo anterior la Organizacionde las Naciones Unidas para la Agricultura (FAO, por sus siglas en ingles), senala que laproduccion agrıcola debe elevarse un 3 % al ano a nivel internacional (Santa Cruz, 2016), espor esto que surge la necesidad de tecnificar los procesos agrıcolas para mejorar la calidadde los productos.
El proceso de siembra, riego y monitoreo de cultivos de hortalizas usualmente requiere detiempo, cuidado y materia prima (semillas, agua, fertilizantes, entre otros); ademas de unoperario, el cual tiene jornadas de trabajo que requieren esfuerzos que pueden ser nocivospara el cuerpo, estos factores pueden traducir en una mala ejecucion de las tareas y con-juntamente desperdicio de los insumos. De este modo, todo el planteamiento y desarrollode esta investigacion se enfoca en un interrogante que da sentido y forma a lo planteadoanteriormente, ¿Que podemos hacer desde la academia para aumentar la produccion agrıcoladel paıs? Por esta razon el proposito de esta investigacion inicialmente tiene por objetivodesarrollar una plataforma movil robotizada que permita la prueba de un Efector-Final parala siembra, riego y monitoreo de hortalizas en un cultivos a pequena escala, con la idea dedar solucion a las problematicas mencionadas anteriormente.
Para el desarrollo de la investigacion se dividio su contenido en seis capıtulos, inicialmente secomenta la investigacion y el proyecto matriz que dio origen al desarrollo del presente, segui-damente estan las investigaciones que aportaron a la eleccion de cada uno de los mecanismosque conforman el prototipo, luego se realizo el diseno y la construccion de la plataformapara la realizacion de cada una de las pruebas que valoran los objetivos fijados inicialmente.Sin embargo, durante el desarrollo de la investigacion se tuvieron limitaciones en la partede las simulaciones, ya que no se contaba con un mayor conocimiento para la creacion delenmallado y el ensamble adecuado para cada una de las piezas, agregando a lo anterior queno se conto con el conocimiento mecanico para la realizacion de un sistema de suspensionque amortiguara las ondulaciones del terreno al momento de realizar los giros y trayectos enel cultivo.
Finalmente, se espera que la plataforma incentive a la creacion de proyectos semejantes yque del mismo modo aporte informacion a los semilleros que realizan investigaciones, con elproposito de mejorar la produccion y la calidad de vida de las personas que trabajan en elsector agrıcola de la region.
1

2 Plataforma movil robotizada para cultivos de hortalizas a pequena escala
Antecedentes y motivacion
El semillero de diseno mecatronico, MEC-AUTRONIC, actualmente se encuentra realizandoestudios e investigaciones sobre robots paralelos comandados por cables para aplicacionesagrıcolas, esto con el fin de obtener las mismas funciones que puede realizar un agricultorespecializado, pero con mejores resultados en los cultivos. La realizacion de este tipo deproyectos incentiva a las nuevas generaciones de agricultores a optar por quedarse y seguirtrabajando en zonas agrıcolas del paıs en pro de mejorar su produccion con tecnologıa espe-cializada en el avance de la agricultura.
La robotica paralela comandada por cables consiste en una plataforma fija, la cual se unea una plataforma movil, conocida como efector-final, por medio de cables para posicionarel efector en cualquier coordenada en su espacio de trabajo. El efector-final utilizado eneste proyecto tiene mecanismos necesarios para desempenar actividades como riego, siem-bra y monitoreo de plantas de hortalizas. Para la prueba del efector-final se desarrollo unaplataforma movil que se desplazara en un cultivo a pequena escala.
Estructura del documento
El presente documento se ha organizado de la siguiente manera:
El capıtulo 1 introduce a explicar el origen de la investigacion, presentando los antecedentes ymotivacion que despertaron el diseno y construccion de la plataforma robotizada para pruebade efectores finales, ademas de esto se fija la metodologıa y el destino de la investigacion conun objetivo general y tres objetivos especıficos.
El capıtulo 2 se encarga de introducir al lector, en las investigaciones que se han realizadohasta el momento y que aportan de alguna manera al desarrollo del proyecto que se describeen el transcurso del documento.
El capıtulo 3 muestra el diseno detallado de la estructura y el Efector-Final que conforman laplataforma, el cual se realizo en el software de modelado mecanico en 2D y 3D, SolidWorks.
En el capıtulo 4 se describen los instrumentos de fabricacion y materiales utilizados durantela construccion del prototipo de la plataforma movil, por otra parte, se muestra la plataformadespues del anclaje de todas sus partes.
En el capıtulo 5 se presenta las pruebas que se realizaron a cada uno de los mecanismos quecomponen la plataforma, a fin de dar cumplimiento con los objetivos establecidos previamenteal inicio del documento.
Capıtulo 6, finalmente en este capıtulo se argumentan cada uno de los resultados obtenidoscon el desarrollo de la investigacion y se nombran las mejoras que pueden aportar en elrendimiento de la plataforma en el cultivo.
2 Guayara Juan David

Plataforma movil robotizada para cultivos de hortalizas a pequena escala
Objetivos
Objetivo general
Desarrollar una plataforma movil robotizada que permita la prueba de un efector final parala siembra, riego y monitoreo de cultivos de hortalizas a pequena escala, los cuales seranutilizados por el robot con cables a desarrollar en el proyecto matriz de investigacion.
Objetivos especıficos
Disenar detalladamente una plataforma movil robotizada compuesta por un sistemade locomocion terrestre y un Efector-Final (sistema de monitoreo y mecanismo desiembra y riego) para cultivos de hortalizas a pequena escala; como herramienta dediseno asistido por computador se utilizara el software SOLIDWORKS.
Construir un prototipo funcional de la plataforma disenada.
Verificar el correcto funcionamiento de cada uno de los subsistemas que componen elprototipo. El sistema de control y comunicacion sera implementado por el estudianteHelman Daniel Zambrano Cortes.
Asistencia de investigacion.Programa de ingenierıa electronica, 2019 3

4 Plataforma movil robotizada para cultivos de hortalizas a pequena escala
4 Guayara Juan David

Capıtulo 1
Robots moviles terrestres paraagricultura
El siguiente capıtulo resume el estado del arte de los robots moviles en el sector agrıcola.A su vez se detallan algunos de los trabajos de investigacion mas representativos sobre estetema.
5

6 Plataforma movil robotizada para cultivos de hortalizas a pequena escala
1.1. Definicion y conceptos
A medida que pasan los anos, la robotica se hace mas frecuente en nuestras vidas, a medidaque crece la poblacion y del mismo modo la escasez de alimentos, el desarrollo y aplicacionde tecnologıas al sector agrıcola con el fin de mejorar la produccion de alimentos, es masusual que en el pasado(Gil, 2016). El avance de estas tecnologıas no solo estan pensadas enla mejora de la produccion de alimentos y calidad de los beneficiados de esta actividad, si notambien se busca atribuir con el cuidado de los recursos naturales que estan en juego en laparte agrıcola del paıs, recurso tan vital como lo es el agua (Gonzalez G, Pacheco, Visaus, yAyla, 2012).
1.1.1. ¿Que es la robotica movil?
La robotica movil es considerada como un area de tecnologıa avanzada que da soluciona problemas que se presentan en un ambito determinado. Sus desarrollos estan enfocadosen sistemas de control, robotica, inteligencia artificial, mecanismos automatizados, sistemasde medicion, percepcion e instrumentacion, ayudando en avances de diversos campos de laindustria, como lo es el caso de la agricultura de precision. En la agricultura la robotica movilesta haciendo de los procesos y las tareas agrıcolas mas eficientes y eficaces para la produccionmasiva de alimentos, por medio del control y monitoreo de cada uno de los procesos.
1.1.2. Tipos de robots moviles
Se pueden encontrar tres tipos de robot moviles terrestres dependiendo de la forma en que sepueden desplazar de un lugar a otro, ver Fig. 1.1. En primer lugar, estan los robots con patas,los cuales son empleados para el desplazamiento en terrenos irregulares con ondulaciones odeformaciones de difıcil acceso; en segundo lugar, se encuentran los que utilizan orugas, estosson implementados en terrenos que necesitan de una mayor adherencia y que no cuentan conmuchas irregularidades; en tercer lugar se encuentran los robots que utilizan llantas, estosson utilizados para superficies planas.
Figura 1.1: Clasificacion de los robots segun su desplazamiento, a. DOGBOT, b. Tractor deoruga, c. RIPPA
Fuente: (Galambo, 2019),(Tractor serie 5k , 2019), (Robot y cols., 2018a).
6 Guayara Juan David

Plataforma movil robotizada para cultivos de hortalizas a pequena escala
1.1.3. Sistemas de locomocion
Para que un robot movil terrestre se pueda trasladar de un lugar a otro necesita de un sistemade locomocion. Dichos sistemas utilizan cintas y ruedas, y se clasifican en: diferencial, sin-cronıa, triciclo, Ackermann y omnidireccionales, ver Fig. 1.2. Para la locomocion diferencial,el cambio de direccion se realiza modificando la velocidad de las rueda izquierda y derecha;para la locomocion en sincronıa, el control en lınea recta esta asegurado mecanicamente porel sistema mecanico; para la locomocion en triciclo, la rueda delantera sirve como traccion ydireccionamiento; la locomocion Ackermann es utilizada en los vehıculos, se usa para que larueda delantera tenga un giro de angulo interior mas agudo que del exterior; finalmente, lasruedas omnidireccionales son las unicas que permiten un movimiento total en dos direcciones,debido a que se mueven como si fuese una rueda normal.
Figura 1.2: sistemas de locomocion para robot con cintas y ruedas. a. Locomocion diferencia,b. Locomocion sıncrona, c. Locomocion triciclo, d. Locomocion Ackermann, e. Locomocionomnidireccionales.
Fuente: (Robot y cols., 2018b)
1.2. Plataformas y sistemas desarrollados hasta el momento
1.2.1. Design of the mechatronic architecture of an agricultural mobilerobot
Artıculo publicado por la Universidad de Sao Paulo – Brasil. En esta publicacion resaltan eldesarrollo de una estructura mecanica capaz de movilizarse por el campo, en otras palabras,ellos realizan el modelo solido detallado en Solid Edge (Siemens Corp.), software comercialCAD, ver Fig. 1.3, y por medio del software ANSYS Workbechc V11.0 ANSYS el analisis dedeformacion y estres de cada una de las piezas que conforman la plataforma. Tambien in-cluyen un modelo electronico encargado de toda la parte del funcionamiento de la estructura.
Asistencia de investigacion.Programa de ingenierıa electronica, 2019 7

8 Plataforma movil robotizada para cultivos de hortalizas a pequena escala
Figura 1.3: Estructura mecanica, sistema de traccion y sistema de direccion.
Fuente: (Tabile y cols., 2010)
Las dimensiones de la estructura son simetricas, utilizan cuatro motores para la traccionde cada una de sus llantas, ademas de eso dos motores para realizar la direccion del robot.Las llantas, neumaticos, pinon y cadena del sistema de locomocion son de motocicletas ylos componentes que se utilizaron para su construccion son comerciales y se consiguen encualquier tienda de mecanica. Finalmente, para el sistema de locomocion utilizan locomocionAckermann, uno de los sistemas comentados en este capıtulo.
1.2.2. Design and development of manually operated seed planter machine
Artıculo publicado por el instituto de tecnologıa e investigacion de Gandhinagar–India. Enesta publicacion explican detalladamente el cuidado que se debe tener al momento de realizarla siembra, tambien el mecanismo que se utilizo y la profundidad que tendra el sembrado.
El sistema de sembrado utiliza el sistema de muelle y embolo, el cual consiste en un plato quese introduce en la tierra y del mismo este va girando y dosificando cada una de las semillas,el sistema esta compuesto por siete pinones los cuales ayudan a cambiar dependiendo en cualse ancle la cadena, la longitud del sembrado entre las semillas, ver Fig. 1.4.
Figura 1.4: a. Sistema completo del sistema de siembra, b. Sistema de dosificacion de semillas.
Fuente:(Kyada y Patel, 2014)
8 Guayara Juan David

Plataforma movil robotizada para cultivos de hortalizas a pequena escala
1.2.3. Agricultural Robot for Automatic Ploughing and Seeding
Artıculo publicado por la Universidad de Australia – Australia. En esta publicacion se re-salta el desarrollo de un robot que se compone realiza arado automatico, distribucion desemillas, fumigacion y recoleccion de frutas, medicion y control de humedad, ver Fig. 1.5 Pa-ra el control de todos los sistemas utilizan un micro controlador AVR, el cual es controladoinalambricamente desde un telefono movil, mientras es guiado por sensores de ultrasonido.En sus sistemas de distribucion de semillas y recoleccion de frutas utilizan servomotores de-bido a su precision angular, finalmente en el sistema de locomocion utilizan motores DC conencoder, con el fin de facilitar la medicion de la distancia que se desplaza el robot por elcultivo.
Figura 1.5: Plataforma movil para tareas agrıcolas.
Fuente: (Amrita Sneha y cols., 2015)
1.2.4. An Agricultural Robot for Multipurpose Operations in a Green-house
Artıculo publicado por la Universidad de Agricultura de Nanjing – China. En esta publicacionse resalta el desarrollo de una plataforma de robot multiusos modular, entre las actividadesque realiza se encuentra la pulverizacion de agua, fertilizante, pesticidas y deshierbe delterreno. La plataforma cuenta con un sistema de locomocion diferencia que se compone decuatro ruedas y dos motores, para los sistemas mecanicos y electricos que desarrollan lasoperaciones en el terreno, utilizan valvula solenoide con boquilla para los lıquidos y para elcorte una cierra electrica, ver Fig. 1.6.
Figura 1.6: Robot agrıcola para tareas multiproposito en granjas. a. Estructura modular, b.Vision por luz utilizada en el robot para poder desplazarse.
Fuente: (XUE y cols., 2017)
Asistencia de investigacion.Programa de ingenierıa electronica, 2019 9

10 Plataforma movil robotizada para cultivos de hortalizas a pequena escala
1.2.5. Mechanical Design and Development of an Electric Mobile Robotfor Agricultural Tasks in Greenhouses
Artıculo publicado por la Universidad de Almerıa– Almerıa. En esta poblacion se resalta eldiseno y desarrollo de un robot electrico movil autonomo para movilizarse entre los surcos deun invernadero y realizar actividades para la proteccion de las plantas. El robot movil cuentacon sistema de traccion en sus cuatro ruedas, en cuanto al sistema de direccion tiene cadapar de llantas independiente a la estructura para poder realizar los giros, finalmente toda laestructura cuenta con un sistema modular para el anclaje de cada uno de los mecanismos,ver Fig. 1.7.
Figura 1.7: Robot movil para tareas agrıcolas en granjas. a. Vista lateral del robot. b. Vistaposterior del robot
Fuente: (Sanchez-Hermosilla y cols., 2006)
1.2.6. Robotic Tankette for Intelligent Bioenergy Agriculture: Design, De-velopment and Field Tests
Artıculo publicado por la Universidad noruega de ciencias de la vida - Noruega. En este artıcu-lo se resalta el diseno y construccion de un robot movil para realizar actividades autonomasde mapeo y recoleccion de muestras de suelo en granjas de cana de azucar. Utilizan cuatroruedas, dos motores, dos cajas reductoras, cadenas como mecanismo para el sistema diferen-cia de locomocion, en cuanto a la parte estructural utilizan perfil y laminas de aluminio, verFig. 1.8.
Figura 1.8: Robot movil de campo en la granja UMOE BioEnergy. a. Vista virtual robot. b.Vista real robot.
Fuente: (Dis y Edition, 2017)
10 Guayara Juan David

Capıtulo 2
Diseno de la plataforma movilSowerBot
El siguiente capıtulo describe detalladamente el diseno de la plataforma movil SowerBot. Sepresenta el modelo 3D desarrollado utilizando el programa de diseno asistido por computador,Solidworks. La seleccion de materiales para fabricacion de los elementos mecanicos y laseleccion de componentes electronicos para el sistema de control y comunicacion.
11
12 Plataforma movil robotizada para cultivos de hortalizas a pequena escala
2.1. Estructura
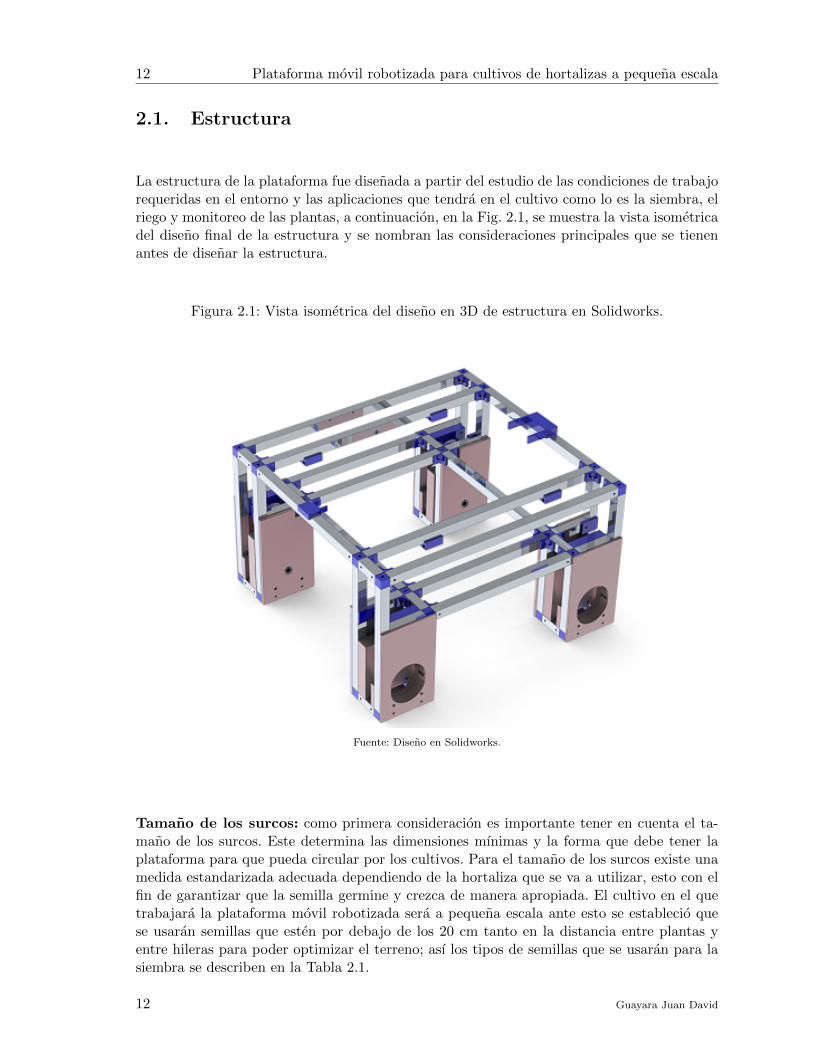
La estructura de la plataforma fue disenada a partir del estudio de las condiciones de trabajorequeridas en el entorno y las aplicaciones que tendra en el cultivo como lo es la siembra, elriego y monitoreo de las plantas, a continuacion, en la Fig. 2.1, se muestra la vista isometricadel diseno final de la estructura y se nombran las consideraciones principales que se tienenantes de disenar la estructura.
Figura 2.1: Vista isometrica del diseno en 3D de estructura en Solidworks.
Fuente: Diseno en Solidworks.
Tamano de los surcos: como primera consideracion es importante tener en cuenta el ta-mano de los surcos. Este determina las dimensiones mınimas y la forma que debe tener laplataforma para que pueda circular por los cultivos. Para el tamano de los surcos existe unamedida estandarizada adecuada dependiendo de la hortaliza que se va a utilizar, esto con elfin de garantizar que la semilla germine y crezca de manera apropiada. El cultivo en el quetrabajara la plataforma movil robotizada sera a pequena escala ante esto se establecio quese usaran semillas que esten por debajo de los 20 cm tanto en la distancia entre plantas yentre hileras para poder optimizar el terreno; ası los tipos de semillas que se usaran para lasiembra se describen en la Tabla 2.1.
12 Guayara Juan David
Plataforma movil robotizada para cultivos de hortalizas a pequena escala
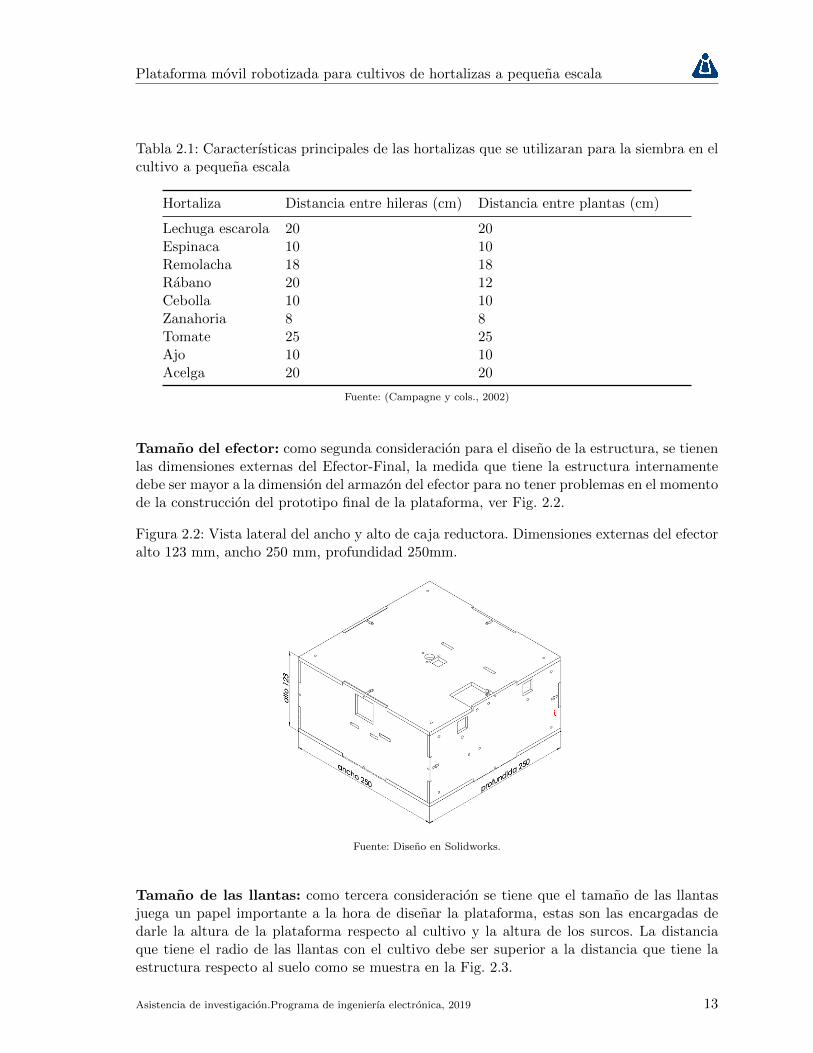
Tabla 2.1: Caracterısticas principales de las hortalizas que se utilizaran para la siembra en elcultivo a pequena escala
Hortaliza Distancia entre hileras (cm) Distancia entre plantas (cm)
Lechuga escarola 20 20Espinaca 10 10Remolacha 18 18Rabano 20 12Cebolla 10 10Zanahoria 8 8Tomate 25 25Ajo 10 10Acelga 20 20
Fuente: (Campagne y cols., 2002)
Tamano del efector: como segunda consideracion para el diseno de la estructura, se tienenlas dimensiones externas del Efector-Final, la medida que tiene la estructura internamentedebe ser mayor a la dimension del armazon del efector para no tener problemas en el momentode la construccion del prototipo final de la plataforma, ver Fig. 2.2.
Figura 2.2: Vista lateral del ancho y alto de caja reductora. Dimensiones externas del efectoralto 123 mm, ancho 250 mm, profundidad 250mm.
Fuente: Diseno en Solidworks.
Tamano de las llantas: como tercera consideracion se tiene que el tamano de las llantasjuega un papel importante a la hora de disenar la plataforma, estas son las encargadas dedarle la altura de la plataforma respecto al cultivo y la altura de los surcos. La distanciaque tiene el radio de las llantas con el cultivo debe ser superior a la distancia que tiene laestructura respecto al suelo como se muestra en la Fig. 2.3.
Asistencia de investigacion.Programa de ingenierıa electronica, 2019 13

14 Plataforma movil robotizada para cultivos de hortalizas a pequena escala
Figura 2.3: Vista frontal de la distancia de la llanta y estructura respecto al terreno.
Fuente: Diseno en Solidworks.
Tamano de los recipientes para agua: como cuarta consideracion se tiene que las dimen-siones externas de los recipientes que contendran el agua para el sistema de riego, junto conlas cajas reductoras se encargan de establecer las dimensiones que debe tener como mınimolas cuatro torres que soportan en la estructura y el sistema de locomocion, ver Fig. 2.4.
Figura 2.4: Vista isometrica de dimensiones externas de recipiente de agua para el sistemade riego. Alto 100 mm, largo 362 mm.
Fuente: Diseno en Solidworks.
Dimensiones de las cajas reductoras: como quinta y ultima consideracion se tiene quelas dimensiones que deben tener las cuatro torres que sostienen la estructura y el soportepara los motores del sistema de locomocion, se debe tomar inicialmente las dimensiones delas cajas reductoras, puesto que se necesita que el ensamble quede justo y tambien ocupe elmenor espacio posible con todas las partes que estaran dentro la estructura, ver Fig. 2.5.
14 Guayara Juan David

Plataforma movil robotizada para cultivos de hortalizas a pequena escala
Figura 2.5: Vista lateral de dimensiones externas de la de caja reductora. Ancho 46.30mm,alto 176.03mm.
Fuente: Diseno en Solidworks.
2.1.1. Etapas de diseno de la estructura
Para el diseno de la estructura despues de las consideraciones tomadas anteriormente se rea-liza la implementacion de un software CAD, Solidworks para el modelado mecanico en 2Dy 3D, con el se realiza el diseno de cada una de las piezas que conforman la estructura y elensamble general, este software ayuda a crear un prototipo virtual de la forma que tomaraal momento de construir la estructura, a continuacion se explica cada una de las etapas delproceso que se llevo acabo para el diseno.
Etapa de dimensionamiento de la estructura: la etapa de dimensionamiento de la pla-taforma se realizo luego de tener las consideraciones del terreno y el tamano de cada una delas piezas que compondran la estructura. Las medidas externas que tendra la estructura semuestran en la Fig. 2.6.
Asistencia de investigacion.Programa de ingenierıa electronica, 2019 15

16 Plataforma movil robotizada para cultivos de hortalizas a pequena escala
Figura 2.6: Vista isometrica de dimensiones externas de la estructura, frente 519 mm, lateral552 mm y altura 322 mm.
Fuente: Diseno en Solidworks.
Etapa de diseno de piezas que componen la estructura: despues de tener las medidasexternas de la estructura, el paso a seguir es crear el diseno de cada una de las piezas que senecesitan para darle forma a la estructura, con lo anterior se tiene como resultado una seriede piezas que forman el ensamble del modelo estructural final, a continuacion en la Fig. 2.7y la Fig. 2.8, se representa cada una de las partes que componen la estructura realizada enel software de diseno con el respectivo material en que sera construido.
Figura 2.7: Vistas isometricas de piezas disenadas para impresion 3D. a. Codo para tresperfiles, b. Codo para cuatro perfiles, c. Codo para cinco perfiles, d. Angulo para perfiles, e.Lamina para perfiles, f. Soporte para caja reductora.
Fuente: Diseno en Solidworks.
16 Guayara Juan David

Plataforma movil robotizada para cultivos de hortalizas a pequena escala
Figura 2.8: Vistas isometricas de piezas disenadas para impresion 3D. a. Codo para tresperfiles, b. Codo para cuatro perfiles, c. Codo para cinco perfiles, d. Angulo para perfiles, e.Lamina para perfiles, f. Soporte para caja reductora.
Fuente: Diseno en Solidworks.
2.1.2. Estudio de resistencia de la estructura
Antes de construir el prototipo es importante verificar su comportamiento bajo condicionesreales y de esta manera saber si los materiales y la forma que tomara la estructura es laadecuada y no sufrira algun dano. Con la ayuda del analisis estatico de Solidworks, se realizoun modelo de la estructura para pruebas de estatica con cargas reales, simulando cada unode los pesos que la plataforma llevara en el momento que se desplace por el cultivo realizandocada una de las funciones, lo anterior implica que a la estructura se le aplicaran lentamentecada una de las cargas hasta completar la totalidad de ellas y poder observar los resultadosque estan en la Fig. 2.10 y en la Fig. 2.11.
Para iniciar el analisis estatico es necesario definir cada pieza de la estructura con su respec-tivo material, en los perfiles se utilizo aleacion de aluminio 1060 y para las uniones de losperfiles polımero ABS, recreando los materiales como se construira el prototipo, este proce-dimiento es necesario para que los datos tengan validez y mayor acercamiento a una pruebareal. Dado que, para el ABS, el software no cuenta con el valor de lımite elastico se consulto elvalor correspondiente y se agrego a las caracterısticas del material. Tambien es indispensableasignar las cargas y fijaciones que tendra el modelo, en la Fig. 2.9, se representan de colorescada uno de ellos. El color verde se designa para las fijaciones, el color amarillo y rojo paralas cargas de 2.5kg y color azul para las cargas de 5kg. Posteriormente se realiza la creacionde la malla, la cual se crea de forma controlada con el fin de eliminar errores de contactoentre los distintos elementos de la estructura y minimizar la incertidumbre de los resultados.
Asistencia de investigacion.Programa de ingenierıa electronica, 2019 17

18 Plataforma movil robotizada para cultivos de hortalizas a pequena escala
Figura 2.9: Vista isometrica de enmallado con representacion de fuerzas y sujeciones de laestructura. Sujeciones en verde, carga de 2.5kg en rojo y amarillo, carga de 5kg en azul.
Fuente: Diseno en Solidworks.
A partir de los resultados de la simulacion se analizan los graficos de tensiones, desplazamien-tos y factor de seguridad para establecer que tan viable sera la construccion de la estructuraa partir del diseno. En el caso del grafico de tensiones (ver Fig. 2.10), se puede observar queel valor de esfuerzo maximo que tendra la estructura es de 16.034 MPa, el cual no superalos valores de limite elastico del ABS (32 MPa) como de la aleacion 1060 de aluminio (27.57MPa) y, por tanto, la deformacion que sufrira la estructura no sera permanente. Con respectoal grafico de desplazamientos, se observa que el desplazamiento maximo es de 0.072mm paralos nodos de color rojo indicados en la Fig. 2.11, es decir el modelo disenado es funcionalbajo esas condiciones dado que el valor es despreciable. Ası mismo, el grafico de factor deseguridad muestra que el valor mınimo que tiene es de 1.7, el cual al ser mayor a 1 confirma,de acuerdo con lo anterior que el diseno del modelo no sufrira danos significativos al momentode recrearse fısicamente.
Figura 2.10: Vistas isometrica resultado de las tensiones ejercidas en la por cada una de lascargas en la estructura.
Fuente: Diseno en Solidworks.
18 Guayara Juan David

Plataforma movil robotizada para cultivos de hortalizas a pequena escala
Figura 2.11: Vistas isometrica resultado de la simulacion realizada a la estructura. Izquierdavalores desplazamiento, derecha valores factor de seguridad.
Fuente: Diseno en Solidworks.
2.2. Sistema de locomocion
El diseno del sistema de locomocion se realizo conjuntamente con el modelo estructuralmencionado anteriormente, a causa de que el sistema estara anclado en la parte inferior paraque la plataforma se pueda movilizar por el cultivo, tambien se tomaron consideracionestal como la traccion, el terreno, resistencia, estabilidad, eficiencia, mantenimiento, control ycostos de fabricacion, ver Fig. 2.12.
Figura 2.12: Vista lateral y frontal externa del diseno del sistema de locomocion de la plata-forma.
Fuente: Diseno en SolidWorks.
Para decidir que sistema de locomocion tendrıa la plataforma movil se hicieron investigacionesde que sistemas son utilizados para ese tipo de aplicaciones; por otro lado, se investigo en
Asistencia de investigacion.Programa de ingenierıa electronica, 2019 19

20 Plataforma movil robotizada para cultivos de hortalizas a pequena escala
cuales se puede utilizar los componentes que ya se tienen a la mano y ası construir el modeloen el menor tiempo posible.
Existen diferentes sistemas de locomocion para robots moviles, en el caso de la plataformamovil se selecciono el diferencial, dado que con este sistema se pueden realizar los cuatromotores existentes, ası como el cambio de direccion tan solo con modificar la velocidad decada uno de ellos, ver Fig. 2.13.
Figura 2.13: Vista explosionada sistema de locomocion. a. Caja de reduccion, b. Acople enPLA para rin y caja reductora, C. Fijaciones en MDF y acero, d. Llanta antipinchazo.
Fuente: Diseno en SolidWorks.
La implementacion de un sistema diferencial en la plataforma presenta ventajas y desventajas,de las cuales, las ventajas principales son: este es un sistema barato y facil de implementar,ya que no necesita de mas mecanismos para realizar el avance y giros dentro del terreno,ademas este sistema solo necesita tener una buena traccion y adherencia al terreno para notener problemas a la hora de movilizarse; por otro lado como desventajas se tiene que elsistema tendra un mayor gasto de baterıas, debido a el esfuerzo que tendra la plataforma alrealizar cada giro, ası mismo tendra mayor desgaste de las llantas por el roce del mecanismocon el terreno, finalmente el sistema tendra una mayor variacion de su posicionamiento conperdida de datos en caso de querer ir en lınea recta, debido a que en muchas de las ocasionesel cultivo no sera plano y tendra ondulaciones.
2.2.1. Piezas que conforman el sistema de locomocion
En la Fig. 2.14 y en la Fig. 2.15, se presenta el diseno de las piezas que conforman el sistemade locomocion para el proceso de corte a laser e impresion 3D.
20 Guayara Juan David

Plataforma movil robotizada para cultivos de hortalizas a pequena escala
Figura 2.14: Vistas isometricas de diseno de piezas para corte en MDF. a. Pieza sujecion deacople para caja reductoras, b. Pieza para sujecion de rin, c. Pieza para esconder cabezas delos tornillos, d. Pieza para sujecion de rin numero 2.
Fuente: Diseno en SolidWorks.
Figura 2.15: Vistas isometricas de diseno de piezas para impresion 3D. a. Pieza para roda-mientos internos del rin, b. Acople para union de caja reductora con rin y llantas.
Fuente: Diseno en SolidWorks.
2.3. Efector-Final para siembra, riego y monitoreo
Para el diseno del efector, inicialmente se hizo un estudio de los mecanismos que pudierancumplir con las caracterısticas necesarias para realizar cada una de las actividades que reali-zara la plataforma como lo son la siembra, el riego y monitoreo de las hortalizas en un cultivoa pequena escala.
2.3.1. Sistema de siembra
En la busqueda de mecanismos se encontraron tres posibles implementaciones para el siste-ma de siembra ver Fig. 2.16, en primer lugar esta el sistema de biela manivela, este metodotransforma un movimiento circular a un movimiento lineal, en segundo lugar esta la imple-mentacion de una bomba electronica de aire, la cual por medio de compresion de aire atrapay libera las semillas en una boquilla, para finalizar el tercer metodo esta conformado por unmecanismo pinon-cremallera, el cual a partir de un movimiento giratorio de un pinon y sus
Asistencia de investigacion.Programa de ingenierıa electronica, 2019 21
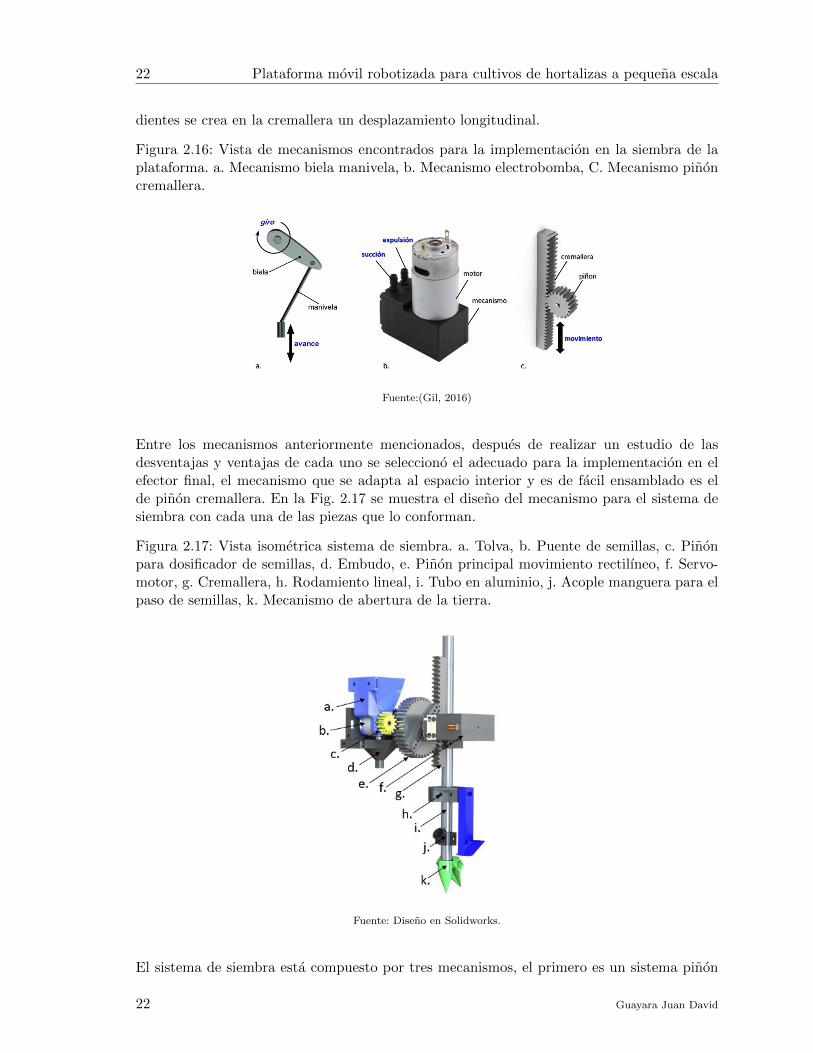
22 Plataforma movil robotizada para cultivos de hortalizas a pequena escala
dientes se crea en la cremallera un desplazamiento longitudinal.
Figura 2.16: Vista de mecanismos encontrados para la implementacion en la siembra de laplataforma. a. Mecanismo biela manivela, b. Mecanismo electrobomba, C. Mecanismo pinoncremallera.
Fuente:(Gil, 2016)
Entre los mecanismos anteriormente mencionados, despues de realizar un estudio de lasdesventajas y ventajas de cada uno se selecciono el adecuado para la implementacion en elefector final, el mecanismo que se adapta al espacio interior y es de facil ensamblado es elde pinon cremallera. En la Fig. 2.17 se muestra el diseno del mecanismo para el sistema desiembra con cada una de las piezas que lo conforman.
Figura 2.17: Vista isometrica sistema de siembra. a. Tolva, b. Puente de semillas, c. Pinonpara dosificador de semillas, d. Embudo, e. Pinon principal movimiento rectilıneo, f. Servo-motor, g. Cremallera, h. Rodamiento lineal, i. Tubo en aluminio, j. Acople manguera para elpaso de semillas, k. Mecanismo de abertura de la tierra.
Fuente: Diseno en Solidworks.
El sistema de siembra esta compuesto por tres mecanismos, el primero es un sistema pinon
22 Guayara Juan David

Plataforma movil robotizada para cultivos de hortalizas a pequena escala
cremallera encargado de realizar el movimiento longitudinal para la penetracion de la tierracomo se menciono anteriormente, el segundo mecanismo es el encargado de efectuar la do-sificacion de semillas, este esta conformado por un pinon acoplado al movimiento principal,una pieza disenada como puente para la dispensacion ordenada de semillas y un embudoconectado al tubo de aluminio central para poner las semillas en el cultivo, el tercer y ultimomecanismo del sistema de siembra es el encargado de realizar la abertura del hoyo donde sedeposita la semilla, este esta conformado por dos piezas en punta unidas a un resorte.
Piezas que componen el diseno del sistema de siembra: a continuacion en las Fig.2.18 y en la Fig. 2.19, se muestran los modelos de cada una de las piezas que se diseno paracorte a laser e impresion 3D para el sistema de siembra.
Figura 2.18: Vistas isometricas de diseno de piezas para corte en MDF. a. Pinon principalmovimiento sistema de siembra, b. Cremallera movimiento sistema de siembra, c. Soportevertical para servomotor, d. Soporte horizontal para servomotor.
Fuente: Diseno en Solidworks.
Figura 2.19: Vistas isometricas de diseno de piezas para impresion 3D. a. Capsula rodamientopara semilla, b. Embudo para semillas, c. Tolva para semillas, d. Pinon para Capsula desemillas.
Fuente: Diseno en SolidWorks.
Asistencia de investigacion.Programa de ingenierıa electronica, 2019 23

24 Plataforma movil robotizada para cultivos de hortalizas a pequena escala
2.3.2. Sistema de riego
Para el diseno del sistema de riego se implemento una electrovalvula para la apertura ybloqueo del paso del agua en el momento de efectuar el riego, debido a que esta no cuentainternamente con un sistema de impulso del agua que circule por las mangueras, por esto seopto por adicionar otro sistema y dar solucion al problema de aspersion, por esto se adaptouna bomba de agua electrica que regularmente es utilizada para los parabrisas de los vehıcu-los, ver Fig. 2.20.
Figura 2.20: Vista isometrica sistema de riego. a. Acople de tuberıa para mangueras, b.Electrovalvula, c. Bomba de agua electrica.
Fuente: Diseno en Solidworks.
Ası mismo se realizo el diseno de los dos recipientes con capacidad para 2.5 litros de aguacada uno ver Fig. 2.21, ademas de los recipientes se desarrollo el modelo de cada uno de losacoples que hacen posible la llegada del agua desde los tanques hasta el sistema de riego parafinalmente poder ser utilizado en el riego de las plantas del cultivo.
Figura 2.21: Vista isometrica recipientes para sistema de riego. a. Acople de tuberıa paramangueras, b. Contenedor para agua.
Fuente: Diseno en Solidworks.
24 Guayara Juan David

Plataforma movil robotizada para cultivos de hortalizas a pequena escala
Piezas que componen el diseno del sistema de riego: a continuacion en la Fig. 2.22,se muestran los modelos de cada una de las piezas del sistema de riego que se diseno paraimpresion 3D.
Figura 2.22: Vista isometrica diseno de piezas para impresion 3D. a. Acople para direccionde manguera, b. Soporte para electrovalvula.
Fuente: Diseno en Solidworks.
2.3.3. Sistema de monitoreo
El diseno del sistema de monitoreo consiste en el modelado virtual de la camara que seencargara de supervisar que cada siembra y riego se realice de manera correcta en el cultivo.A continuacion en la Fig. 2.23, se muestra el diseno de la camara a utilizar y cada una de laspiezas que se imprimen en 3D que ayudan a soportar la camara en el efector-final.
Figura 2.23: Vista isometrica de diseno de camara para el sistema de monitoreo y pieza parasujecion de camara en el Efector-Final.
Fuente: Diseno en Solidworks.
Asistencia de investigacion.Programa de ingenierıa electronica, 2019 25

26 Plataforma movil robotizada para cultivos de hortalizas a pequena escala
2.3.4. Diseno externo del Efector-Final
Luego de tener todos los mecanismos necesarios para cada una de las tareas que se realizaraen el cultivo, se inicio el diseno exterior del efector como se muestra en la Fig. 2.24 tomandocomo base las piezas del modelo de la estructura, por ejemplo, para la parte del armazon seutilizo MDF y perfiles en aluminio, para la parte de sujecion de cada una de las piezas en elefector se utilizo piezas en impresion 3D y acero.
Figura 2.24: Vista isometrica de diseno de camara para el sistema de monitoreo y pieza parasujecion de camara en el Efector-Final.
Fuente: Diseno en Solidworks.
En las Fig. 2.25, se muestran las piezas que conforman la estructura del efector final para elproceso de corte a laser.
Figura 2.25: Vista isometrica de diseno de camara para el sistema de monitoreo y pieza parasujecion de camara en el Efector-Final.
Fuente: Diseno en Solidworks.
26 Guayara Juan David
Capıtulo 3
Fabricacion y construccion de unprototipo
En este capıtulo se describe la fabricacion y construccion del sistema mecanico y electronicoque conforman la plataforma movil SowerBot. Se describen en detalle los materiales, ele-mentos mecanicos y componentes electronicos que se utilizaron, junto con las herramientasutilizadas en la construccion. Finalmente, se muestra el prototipo real con cada uno de sussubsistemas.
27

28 Plataforma movil robotizada para cultivos de hortalizas a pequena escala
3.1. Seleccion de materiales
Para el proceso de seleccion de materiales que se emplearon en el diseno y la construccionde la plataforma robotizada, se consideraron factores basicos que estan relacionados directa-mente en lo fısico y en lo mecanico de cada una de las partes que componen la estructura yel efector final.
3.1.1. Sistema de locomocion
Para el sistema de locomocion se implementaron materiales que cumplan de manera satisfac-toria en el campo que se movilizara la plataforma; para las ruedas se utilizo poliuretano microcelular este es ligero, tiene una buena adherencia al terreno y se puede instalar con facilidada cualquier superficie; para parte de los rines de las ruedas y acoples a cajas reductoras seusa el MDF, este se consigue en variedad de dimensiones y se puede crear con facilidad piezasen 2D con la ayuda de una maquina de corte a laser; los polımeros derivados del petroleoy productos naturales (ABS y PLA), son utilizados en los soportes para las ruedas que seunen con la caja reductora; el acero, es usado para la sujecion de cada una de las piezas aligual que el eje principal que sostendra todo el sistema de locomocion con la estructura dela plataforma. A continuacion se presentan en las tablas 3.1, 3.2, 3.3 y 3.4 cada uno de losmateriales utilizados en la construccion del sistema de locomocion.
Tabla 3.1: Fijaciones en acero empleadas en el diseno y construccion del sistema de locomo-cion.
Tipo Metrica(mm) Cantidad (unidades)
Tornillo estrella M3 x 70 24Tornillo Hexagonal M5 x 55 16Tornillo Hexagonal M10 x 210 4
Fuente: Diseno en Solidworks.
Tabla 3.2: Material en MDF empleadas en el diseno y construccion de las piezas del sistemade locomocion, ver Fig. 2.14
Tipo Metrica(mm) Dimensiones (cm)
Lamina de MDF 5.5 50x50Lamina de MDF 4 20x20Lamina de MDF 2.5 10x10
Fuente: Diseno en Solidworks.
28 Guayara Juan David

Plataforma movil robotizada para cultivos de hortalizas a pequena escala
Tabla 3.3: Filamento para impresion 3D empleado en la construccion de las piezas del sistemade locomocion, ver Fig. 2.15
Tipo Cantidad(g) Color
Filamento PLA 150 Azul oscuroFilamento PLA 50 Amrillo
Fuente: Diseno en Solidworks.
Tabla 3.4: Otros materiales empleados en la construccion del sistema de locomocion.
Tipo Dimensiones Cantidad (unidades)
NSK 6800 rodamiento 10mmx19mm 8Llanta antipinchazo con rin metalico 10inx5in 4Cajas reductoras 12 v de moto para ninos 4
Fuente: Diseno en Solidworks.
3.1.2. Estructura
Para la estructura se seleccionaron materiales manejables, para que al momento de quererhacer una modificacion se facilite; tambien se considero que tenıa que ser ligero debido altamano que tendra. Para darle forma a la estructura se selecciono perfilerıa en aluminio,MDF como parte de las bases que sostendra cada una de las ruedas, acero para sujecion yresistencia de las piezas y como ultimo polımeros (PLA o ABS) para la impresion de los codosque conectan cada uno de los tubos de aluminio. A continuacion se presentan las tablas 3.5,3.6, 3.7, 3.8 y 3.9, cada uno de los materiales utilizados en la construccion de la estructura.
Tabla 3.5: Fijaciones en acero empleadas en el diseno y construccion de la estructura
Tipo Metrica(mm) Cantidad (unidades)
Tornillo estrella M4 x 30 80Tornillo estrella M4 x 50 8Varilla roscada M5 x 400 8Varilla roscada M5 x 200 8
Fuente: Diseno en Solidworks.
Asistencia de investigacion.Programa de ingenierıa electronica, 2019 29

30 Plataforma movil robotizada para cultivos de hortalizas a pequena escala
Tabla 3.6: Perfiles en aluminio empleados en el diseno y construccion de la estructura
Nombre Dimension(mm) Cantidad (unidades)
Perfil vertical largo 285 8Perfil vertical corto 167 8Perfil horizontal largo 514 4Perfil horizontal mediano 335 4Perfil horizontal mediano 2 314 4Perfil horizontal corto 81 16Perfil horizontal corto 2 54 16
Fuente: Diseno en Solidworks.
Tabla 3.7: Material en MDF empleado para la construccion de las piezas para la estructura.ver Fig. 2.8
Nombre Dimension(mm) Cantidad (unidades)
Lamina MDF 5.5 50x50Lamina MDF 4 20x20Lamina MDF 2.5 10x10
Fuente: Diseno en Solidworks.
Tabla 3.8: Filamento para impresion 3D empleado en la construccion de las piezas de laestructura, ver Fig. 2.7
Tipo Cantidad(g) Color
Filamento ABS 1000 Azul claroFilamento PLA 500 Azul oscuro
Fuente: Diseno en Solidworks.
Tabla 3.9: Otros materiales empleados en la construccion de la estructura.
Tipo Dimensiones Cantidad (unidades)
NSK 6800 rodamiento 10mmx19mm 8
Fuente: Diseno en Solidworks.
30 Guayara Juan David

Plataforma movil robotizada para cultivos de hortalizas a pequena escala
3.1.3. Efector-Final
Para la construccion del efector final se eligieron materiales que ayuden a aislar los mecanis-mos de los elementos naturales que se encuentran externos e internos a la plataforma. Parala forma del efector se utilizaron laminas de acrılico, al igual que el MDF de la estructura;se hace uso de una maquina de corte a laser para la creacion de figuras en 2D, perfil de alu-minio para dar resistencia a la estructura del efector, tubo en aluminio para el eje principalque conforma el mecanismo de siembra, tubo PVC para los tanques que contienen el aguapara el sistema de riego, ABS y PLA para el sistema de dosificacion de semillas, sujecion deelectrovalvula y mangueras y para finalizar el acero que ayuda a la sujecion de cada una delas piezas que conforman el Efector-Final. a Continuacion en las tablas 3.10, 3.11, 3.12, 3.13y 3.14 se muestran los materiales utilizados para la construccion del efector.
Tabla 3.10: Fijaciones en acero empleadas en el diseno y construccion del Efector-Final.
Tipo Metrica(mm) Cantidad (unidades)
Tornillo estrella M3 x 15 35Tornillo estrella M3 x 30 4Varilla roscada M3 x 50 2Varilla roscada M4 x 25 3
Fuente: Diseno en Solidworks.
Tabla 3.11: Perfiles en aluminio empleados en el diseno y construccion del Efector-Final.
Nombre Dimension(mm) Cantidad (unidades)
Perfil horizontal mediano 335 2Tubo de aluminio 13x260 1
Fuente: Diseno en Solidworks.
Tabla 3.12: Material en MDF empleadas en el diseno y construccion del Efector-Final, verFig. 2.18 y en la Fig. 2.25.
Nombre Dimension(mm) Cantidad (unidades)
Lamina MDF 5.5 70x70Lamina MDF 4 15x15Lamina MDF 2.5 15x15
Fuente: Diseno en Solidworks.
3.1.4. Sistema de Control
El sistema de control es el encargado del funcionamiento de cada uno de los mecanismos queestan el sistema de locomocion y el efector final, previamente se nombraron los materiales que
Asistencia de investigacion.Programa de ingenierıa electronica, 2019 31

32 Plataforma movil robotizada para cultivos de hortalizas a pequena escala
Tabla 3.13: Filamento para impresion 3D empleado para la construccion del Efector-Final,ver Fig. 2.19, la Fig. 2.22 y la Fig. 2.23.
Tipo Cantidad(g) Color
Filamento ABS 250 Azul claro
Fuente: Diseno en Solidworks.
Tabla 3.14: Materiales varios empleados en la construccion del sistema del Efector-Final.
Tipo Dimensiones Cantidad (unidades)
NSK 6800 rodamiento 10mmx19mm 2Manguera 10cmx10mm 1Union macho a macho PVC 1/2in 6Manguera de conexion para lavamanos 25cm 2T en PVC 1in 1
Fuente: Diseno en Solidworks.
conforman la parte estructural de toda la plataforma, pero para poder hacer que el prototiporealice cada uno de los procesos dentro del cultivo se necesita de una parte electronica y decontrol como por ejemplo, sensores, actuadores, ordenadores entre otros. A continuacion enla tabla 3.15 se muestran los materiales que se utilizan para la construccion del sistema decontrol disenado y implementado por Helman Daniel Zambrano Cortes.
Tabla 3.15: Materiales empleados en la construccion del sistema de control.
Tipo Caracteristicas Cantidad (unidades)
Bateria lipo Alimentacion 2PowerBank Alimentacion 1Bateria de plomo Alimentacion 1Control de Xbox y adaptador Control inalambrico 1Mini Router GL-AR300M 1Raspberry Pi 3 B+ Controlador 1ROS Sensor 1Arduino Mega 2560 Segundo Controlador 1
Fuente: Diseno control por Helman Daniel Zambrano Cortes.
3.2. Impresion 3D, corte laser y mecanizado
En la fabricacion de la plataforma movil se opto por utilizar tecnologıas de punta que facilitanel proceso de construccion, en la plataforma se aplicaron procesos como la manufacturacionpor adiccion mas conocida como la impresion 3D, esta consiste en la adicion de material que
32 Guayara Juan David

Plataforma movil robotizada para cultivos de hortalizas a pequena escala
por medio de un extrusor se caliente y derrite formando capas repetidamente hasta crearun objeto fısico, la impresion 3D se utilizo en la plataforma para la creacion de partes queno son comerciales o de facil acceso, como por ejemplos: los angulos para perfil de aluminio,soportes para interruptores, soporte para modem, acople para caja reductoras entre otros.
3.2.1. Impresion 3D
Para la fabricacion de objetos en impresion 3D es necesario tener algunas consideracionesantes de imprimir, las piezas modeladas en Solidworks necesitan de tolerancias debido aque la maquina cuenta con un leve error por la altura de capa y el diametro interno de laboquilla del extrusor, por esto las piezas al ser impresas no tienen las mismas dimensionesque se tienen en el diseno. Para encontrar el valor que se le debıa agregar a las impresionesen el momento de disenar se realizaron varias pruebas en las que se determino que comomınimo en las dimensiones de las piezas se debe aumentar 0.20 mm para que las impresionesse impriman con la medida que se desea.
3.2.2. Corte laser
Continuando con los metodos de fabricacion y mecanizados utilizados para la construcciondel prototipo, como segundo proceso de creacion se opto por el corte laser, esta es unatecnica que trabaja mediante Dioxido de carbono y otros quımicos comprimidos, que sonestimulados mediante barras de diodo que son conectadas electricamente y crean un rayolaser, esta tecnica es usada para cortar tablas de fibra de densidad media (MDF) y laminasde acrılico buscando crear con precision y exactitud piezas en 2D desde un modelo virtual.
3.2.3. Mecanizado
Para finalizar se empleo fabricacion por mecanizado, este proceso consiste en la eliminacionde material en metales ya sea por arranque de viruta o por abrasion, esto es utilizado parala creacion de piezas que recaeran las tensiones que tendra la plataforma al momento demovilizarse por el cultivo, ya que estas requieren de mas resistencia y de mayor dureza. Laplataforma hace uso de partes que normalmente no vienen con las caracterısticas deseadas,para la manufacturacion de estas se emplearon maquinas como el taladro, limadora, torno yfresadora.
3.3. Prototipo real
Una vez que se cuenta con todos los materiales y tambien finalizada la parte de fabricacion decada una de las partes que conforman la estructura y el Efector-Final, se realiza el ensamblede cada una de sus piezas en base al diseno desarrollado en Solidworks, se inicia con laparte estructural, luego con el anclaje del sistema de locomocion, por otra parte se realizael ensamble de cada uno de los sistema que conforman el Efector final, teniendo los dosensambles se puede finalizar el armado de toda la plataforma, sumando el sistema electronicode control construido y programado por mi companero Helman Daniel Zambrano Cortes, acontinuacion en la Fig. 3.1 y la Fig. 3.2 se muestran los acabados finales de toda la plataformay el efector.
Asistencia de investigacion.Programa de ingenierıa electronica, 2019 33

34 Plataforma movil robotizada para cultivos de hortalizas a pequena escala
Figura 3.1: Vista del prototipo finalizado de la plataforma robotizada para la prueba deEfectores-Finales.
Fuente: Camara profesional.
Figura 3.2: Vista del Efector-Final con cada uno de sus sistemas, sistema de sembrado,sistema de riego y sistema de monitoreo.
Fuente: Camara profesional.
34 Guayara Juan David
Capıtulo 4
Pruebas y resultadosexperimentales
En este capıtulo se describen las pruebas experimentales realizadas al prototipo construido.Dichas pruebas fueron realizadas junto con el estudiante Helman Daniel Zambrano Cortes,quien desarrollo el sistema de control y comunicacion electronico de la plataforma movil. Laspruebas realizadas se enfocaron en el sistema de locomocion, siembra, riego y monitoreo.
35

36 Plataforma movil robotizada para cultivos de hortalizas a pequena escala
4.1. Experimento 1: Sistema de locomocion
Para la prueba del sistema de locomocion, la plataforma cuenta con un control automaticoy semiautomatico. En el caso del control automatico, la plataforma es programada con unatrayectoria como se muestra en la Fig. 4.2, que corresponde al posicionamiento y dimensiona-miento de los surcos donde se haran las pruebas de movimiento ver Fig. 4.1, a fin de observarel comportamiento de la plataforma cuando realiza desplazamientos en lınea recta y giros.
Figura 4.1: Pruebas del sistema de locomocion en campo.
Fuente: Camara profesional.
Figura 4.2: Pruebas realizadas al sistema de locomocion. Trayectoria programada para pruebaen campo del sistema de locomocion.
Fuente: Microsoft Word.
Para el caso del control semiautomatico, se realizaron pruebas de esfuerzo en diferentes con-diciones de terreno, con el fin de comprobar el comportamiento de la estructura y adaptacion
36 Guayara Juan David

Plataforma movil robotizada para cultivos de hortalizas a pequena escala
de las cajas reductoras, en un terreno que no este tratado y se encuentren en condiciones nodeseadas. La prueba se desarrollo en una pendiente con diferentes obstaculos, por ejemplo,piedras, ramas, arena y pasto. En respuesta a la prueba, la plataforma vencio cada uno delos obstaculos y llego a la cima de la pendiente demostrando la posibilidad de utilizarse enterrenos no planos.
4.2. Experimento 2: Sistema de siembra
Para la prueba del sistema de siembra se establecio una distancia de 30cm de una planta aotra, en la prueba se utilizo la trayectoria con la que se realizaron las pruebas del sistema delocomocion, donde la plataforma a medida en que se movilizaba por el surco, el mecanismode siembra se accionaba repetidamente hasta completar el total de las perforaciones, luegocon la ayuda de un flexometro se midio la distancia de un orificio a otro confirmando ladistancia establecida en un inicio, ver Fig. 4.3.
Para finalizar se repitio la trayectoria de la siembra, pero esta vez con semillas, esto con elfin de probar el mecanismo interno de dosificacion que tiene el sistema de siembra; comoresultado la plataforma realizo la penetracion y la siembra de tres a cuatro semillas poraccionamiento, comprobando que el funcionamiento es apto para la realizacion de siembrasa escala.
Figura 4.3: Resultados prueba del sistema de siembra. Prueba de siembra en el terreno,medida de distancia de los orificios realizados por el sistema de siembra, dosificacion desemillas en el terreno.
Fuente: Camara profesional.
Asistencia de investigacion.Programa de ingenierıa electronica, 2019 37

38 Plataforma movil robotizada para cultivos de hortalizas a pequena escala
4.3. Experimento 3: Sistema de riego
Para la prueba del sistema de riego, se realizo la misma trayectoria del mecanismo de siembra,dado que se necesita la activacion del sistema de riego justo en el lugar donde quedaron lasperforaciones o semillas. El mecanismo se activo por un periodo corto de tiempo en cada unade las repeticiones, en busca de utilizar la menor cantidad de agua posible ver Fig. 4.4.
Figura 4.4: Resultados y validacion del sistema de riego respecto a la siembra.
Fuente: Camara profesional.
4.4. Experimento 4: Sistema de monitoreo
Despues de las pruebas anteriores se finalizo con la prueba de monitoreo, que consistio enverificar la toma de fotografıas y del mismo modo comprobar la deteccion de los objetos decolor verde que estan dentro de los surcos como se muestra en la Fig. 4.5.
Figura 4.5: Resultados y validacion del sistema de riego respecto a la siembra.
Fuente: Camara profesional.
38 Guayara Juan David

Capıtulo 5
Conclusiones y recomendaciones
En este capıtulo se comenta cada uno de los resultados de la investigacion, que tienen relaciona cada uno de los objetivos fijados al inicio, tambien se nombra cada una de las recomenda-ciones que estan asociadas a la mejora de la plataforma construida.
39

40 Plataforma movil robotizada para cultivos de hortalizas a pequena escala
5.1. Conclusiones
Como resultado de la investigacion, en la parte de diseno es posible concluir que la simula-cion que se realizo de la estructura comprobo de manera adecuada, que el modelo no tendrıadanos en las piezas donde estarıan sujetas cada una de las cargas.
En la construccion de la plataforma, al momento de replicar el diseno realizado, a un proto-tipo real, las piezas en su totalidad se ensamblaron considerando tolerancias de 0.20 mm almomento de su fabricacion (impresion 3D), cumpliendo con cada uno de los parametros delmodelado.
Para finalizar, se comprobo el funcionamiento de la plataforma y cada uno de los sistemasque conforman el efector-final, con la ayuda del estudiante Helman Daniel Zambrano Cortes.Las pruebas que se realizaron al sistema de siembra permitieron dosificar y sembrar de tresa cuatro semillas por perforacion; para el sistema de riego se cuenta con 5 L de agua para untotal de 100 aspersiones; y el sistema de monitoreo, cuenta con un sistema para la detenciony toma de imagenes de las plantas.
5.2. Recomendaciones
Dentro de una investigacion tan ambiciosa como lo fue esta, siempre se esta pensando lamanera de mejorarse; por lo tanto, se recomienda a futuros estudiantes, la implementacionde un sistema de suspension, el cual permita que la plataforma pueda desenvolverse de unamejor forma en el cultivo. La necesidad que tiene el prototipo de un sistema de suspensionse establece en el momento que se realizaron las pruebas de este, debido a que el sistema delocomocion no cuenta con amortiguamiento de los golpes que se producen en las piezas porlas vibraciones que se absorben, con el tiempo se crea un deterioro al nivel estructura en laplataforma, perjudicando notoriamente el funcionamiento de cada uno de los sistemas que loconforman.
Otra recomendacion seria incluir un sistema que pueda seguir en vivo cada uno de los mo-vimientos del robot, en busca de mejorar la precision a la hora de realizar las tareas con elEfector-Final, consiguiendo que la plataforma se movilice de manera precisa y cumpla conexactitud cada una de las tareas fijadas en la plataforma para un cultivo a pequena escalade hortalizas.
40 Guayara Juan David
Referencias
Amaya, L. A. (2018). Mecanismos transmisores movimiento. Descarga-do de https://principiosdetecnologiaeinformatica.blogspot.com/2018/08/
mecanismos-transmisores-movimiento.html
Amrita Sneha, A., Abirami, E., Ankita, A., Praveena, R., y Srimeena, R. (2015). Agricultu-ral Robot for automatic ploughing and seeding. Proceedings - 2015 IEEE InternationalConference on Technological Innovations in ICT for Agriculture and Rural Develop-ment, TIAR 2015 (Tiar), 17–23. doi: 10.1109/TIAR.2015.7358525
Campagne, U. N. E., Ministere, D. U., Sante, D. E. L. A., La, D., y Du, C. (2002). ProduccionDe Hortalizas. Solutions, 20. Descargado de http://www.fao.org/3/a-as972s.pdf
Dis, B., y Edition, E. (2017). Robotic tankette for intelligent bioenergy agriculture: Design,development and field tests. (April), 1–5.
Galambo, C. (2019). Dogbot. Descargado de https://hackaday.io/project/26031
-dogbot
Gil, A. P. (2016). Robotica tecnoparque. Rionegro - Antoquia.Gonzalez G, J. P. ., Pacheco, B., Visaus, F., y Ayla, K. (2012). Movilidad de pesticidas en
aguas superficiales empleadas en agricultura y riesgos para la salud humana en la zonacentro del Departamento de Boyaca - Colombia. L’esprit Ingenieux , 3 , 155–165.
Kyada, A. R., y Patel, D. B. (2014). Design and Development of Manually Operated SeedPlanter Machine. 5th International & 26th All India Manufacturing Technology, Designand Research Conference(Aimtdr), 590–597.
Robot, T., Perception, I., Application, P., Agricultural, T., Group, P., Expo, P. A., . . . Clarke,J. (2018a). RIPPA front and centre at Precision Agriculture Expo RIPPA front andcentre at Precision Agriculture Expo. (April).
Robot, T., Perception, I., Application, P., Agricultural, T., Group, P., Expo, P. A., . . . Clarke,J. (2018b). RIPPA front and centre at Precision Agriculture Expo RIPPA front andcentre at Precision Agriculture Expo. (April).
Sanchez-Hermosilla, J., Paez, F., Rincon, V., y Donaire, J. G. (2006). Mechanical Designand Development of an Electric Mobile Robot for Agricultural Tasks in Greenhouses.(2005), 2–7.
Santa Cruz, F. (2016). Robots en la agricultura: Nuevas tecnologıas en el campo. Descargadode http://sistemaagricola.com.mx/blog/robots-en-la-agricultura/
Tabile, R. A., Godoy, E. P., Pereira, R. R. D., Tangerino, G. T., Porto, A. J. V., y Inama-su, R. Y. (2010). Design of the mechatronic architecture of an agricultural mobi-le robot. IFAC Proceedings Volumes (IFAC-PapersOnline), 43 (18), 717–724. doi:10.3182/20100913-3-US-2015.00102
Tractor serie 5k. (2019). Descargado de https://www.deutz-fahr.com/es-es/productos/
tractores/6444-serie-5k
XUE, J.-l., FAN, B.-w., ZHANG, X.-x., y FENG, Y. (2017). An Agricultural Robot forMultipurpose Operations in a Greenhouse. DEStech Transactions on Engineering andTechnology Research(icmme). doi: 10.12783/dtetr/icmme2017/9073