Práctica3_MECANO_Cinamatica barras
2
PRÁCTICAS DE TEORÍA DE MÁQUINAS Y MECANISMOS Práctica 3: Cinemática plana de un sistema de barras 1. OBJETIVO El objetivo de esta práctica es estudiar la cinemática plana de un sistema de barras, accionadas por un motor eléctrico. Después de construir el sistema con piezas de “Meccano”, tendréis que determinar la velocidad angular de las barras y la velocidad lineal de uno de los puntos de unión, en función del tiempo. 2. CONSTRUCCIÓN DEL SISTEMA DE BARRAS Vamos a estudiar la cinemática del sistema de barras representado en la Fig. 1. La realización práctica de este sistema con “Meccano” se muestra en la Fig. 2a. Las tres barras que se utilizan son: Barra OB: 3 agujeros Barra AB: 7 agujeros Barra AO’: 9 agujeros El movimiento del conjunto se consigue por la acción de un motor eléctrico, que gira con velocidad angular constante ϖ m . Esta velocidad de rotación se reduce a un valor de ϖ OB mediante un par reductor (engranaje pequeño, D s =8 mm, engranaje grande, D g =35 mm), y se transmite a la barra OB mediante una polea (D p =35 mm). La Fig. 2b muestra cómo unir convenientemente las barras en los puntos A y B, para minimizar en lo posible el movimiento fuera del plano. El motor y las piezas de “Meccano” que mantienen en posición los ejes de la rueda reductora, la polea y el punto O’ se fijan sobre una base de madera, en las posiciones marcadas sobre ésta. O O’ B A ( OB ( Fig. 1. Esquema del sistema cinemático de tres barras. Fig. 2. (a) Montaje del sistema de barras acionado por motor eléctrico; (b) Detalle de la unión entre barras.
-
Upload
david-marimon -
Category
Documents
-
view
13 -
download
0
Transcript of Práctica3_MECANO_Cinamatica barras

PRÁCTICAS DE TEORÍA DE MÁQUINAS Y MECANISMOS
Práctica 3: Cinemática plana de un sistema de barra s
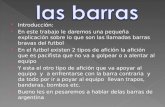
1. OBJETIVO El objetivo de esta práctica es estudiar la cinemática plana de un sistema de barras, accionadas por un motor eléctrico. Después de construir el sistema con piezas de “Meccano”, tendréis que determinar la velocidad angular de las barras y la velocidad lineal de uno de los puntos de unión, en función del tiempo. 2. CONSTRUCCIÓN DEL SISTEMA DE BARRAS Vamos a estudiar la cinemática del sistema de barras representado en la Fig. 1.
La realización práctica de este sistema con “Meccano” se muestra en la Fig. 2a. Las tres barras que se utilizan son:
Barra OB: 3 agujeros Barra AB: 7 agujeros Barra AO’: 9 agujeros
El movimiento del conjunto se consigue por la acción de un motor eléctrico, que gira con velocidad angular constante ωm. Esta velocidad de rotación se reduce a un valor de ωOB mediante un par reductor (engranaje pequeño, Ds=8 mm, engranaje grande, Dg=35 mm), y se transmite a la barra OB mediante una polea (Dp=35 mm). La Fig. 2b muestra cómo unir convenientemente las barras en los puntos A y B, para minimizar en lo posible el movimiento fuera del plano.
El motor y las piezas de “Meccano” que mantienen en posición los ejes de la rueda reductora, la polea y el punto O’ se fijan sobre una base de madera, en las posiciones marcadas sobre ésta.
OO’
B
A
( OB(
Fig. 1. Esquema del sistema cinemático de tres barras.
Fig. 2. (a) Montaje del sistema de barras acionado por motor eléctrico; (b) Detalle de la unión entre barras.

TEORÍA DE MÁQUINAS Y MECANISMOS Práctica 3. Cinemática plana
3. EJERCÍCIOS PRÁCTICOS:
3.1 Generación y transmisión del movimiento de rota ción
� Determinación experimental de la velocidad de rotac ión angular del motor, ωm.
En primer lugar, montad sólo el motor eléctrico sobre la base, y sujetad firmemente una barra larga (de unos 8 agujeros) al eje. Utilizad una célula fotoeléctrica para medir la velocidad angular de rotación, contando el número de veces que la barra “corta” el haz de la célula (Fig.3 ).
� Determinación de la velocidad angular de rotación d e la barra OB, ωOB.
Analizad el sistema reductor transmisor y calculad la velocidad angular de la barra OB (ωOB) a partir de la velocidad angular del motor medida (ωOB).
3.2 Estudio de la cinemática de las barras
Análisis cualitativo: Observad atentamente el movimiento del sistema. La barra OB gira con una velocidad angular constante, en el mismo sentido que el motor. En cambio, la velocidad angular de las barras AB y O’A cambia de sentido y módulo a lo largo de un ciclo.
� Dibujad un esquema que represente la posición de la s barras en los instantes en que se produce el cambio de sentido de giro.
� Representad, de aproximada, la función de la veloci dad angular de la barra O’A en función del tiempo, ωωωωO’A(t).
Análisis cuantitativo: Analizad el sistema para un instante arbitrario, en el que la barra O’A forma un ángulo θ con la horizontal.
� Hallar, en función de θθθθ:
La velocidad y aceleración del punto A
La velocidad del punto D (el tercer agujero de la barra AB)
La velocidad angular de la barra AB
La velocidad angular de la barra O’A
ξ m
Figura 3. Esquema del montaje para medir la velocidad angular del motor, ωm