practica6y7.pdf
24
Universidad Nacional de San Juan - Facultad de Ingeniería DEPARTAMENTO DE ELECTRONICA Y AUTOMATICA Carrera: Bioingeniería Área CONTROL Asignatura: CONTROL I GUIA DE APRENDIZAJE Y AUTOEVALUACION UNIDAD DE APRENDIZAJE Nº 4 “ANALISIS DE LA RESPUESTA DE SISTEMAS LINEALES AUTONOMOS EN EL DOMINIO DE LA FRECUENCIA” PRÁCTICO Nº 6 y PRÁCTICO Nº 7 y
Transcript of practica6y7.pdf

Universidad Nacional de San Juan - Facultad de Ingeniería DEPARTAMENTO DE ELECTRONICA Y AUTOMATICA
Carrera: Bioingeniería Área CONTROL
Asignatura: CONTROL I GGUUIIAA DDEE AAPPRREENNDDIIZZAAJJEE YY AAUUTTOOEEVVAALLUUAACCIIOONN UNIDAD DE APRENDIZAJE Nº 4
““AANNAALLIISSIISS DDEE LLAA RREESSPPUUEESSTTAA DDEE SSIISSTTEEMMAASS LLIINNEEAALLEESS AAUUTTOONNOOMMOOSS EENN EELL DDOOMMIINNIIOO DDEE LLAA
FFRREECCUUEENNCCIIAA””
PRÁCTICO Nº 6 y PRÁCTICO Nº 7 y

Unidad 4 – Practico Nº 6 y Práctico Nº 7- 1
PRACTICO Nº 6 Y PRÁCTICO Nº 7 1- OBJETIVOS GENERALES: Al finalizar la unidad el alumno deberá: 1. Conocer el concepto de respuesta en frecuencia de sistemas lineales autónomos. 2. Comprender la relación entre las especificaciones del dominio frecuencial y las del
dominio temporal y su importancia en el diseño de sistemas de control. 3. Conocer las gráficas polares de respuesta en frecuencia. 4. Conocer las gráficas rectangulares de respuesta en frecuencia. 5. Comprender cómo a partir de la determinación experimental de la respuesta en frecuencia
de un sistema usando gráficas rectangulares se puede, determinar el modelo matemático del mismo.
6. Conocer la utilidad de las gráficas frecuenciales para establecer las características de un
sistema realimentado negativamente, a través de la representación frecuencial de lazo abierto.
2. OBJETIVOS ESPECÍFICOS: Al finalizar la unidad el alumno podrá:
2.1.1. Explicar cuál es el procedimiento para obtener la respuesta en frecuencia de un
sistema, en forma experimental y en forma analítica, definiendo el estado enque se debe encontrar el sistema.
2.1.2. Describir las cantidades que interesa medir en el análisis de respuesta en frecuencia.
2.2.1. Definir las principales especificaciones en el dominio frecuencial. 2.2.2. Relacionar para sistemas de segundo orden las especificaciones de respuesta
en frecuencia con las especificaciones del domino temporal. 2.3.1. Explicar cómo se obtienen gráficas rectangulares de respuesta en frecuencia.
2.3.2 Realizar la gráfica de magnitud en decibeles contra logaritmo decimal de lafrecuencia y fase en grados contra logaritmo decimal de la frecuencia odiagrama exacto de Bode, usando métodos analíticos y computacionales.Realizar la gráfica aproximada por asíntotas de Bode, para un sistema lineal, apartir del conocimiento de la función de transferencia.
2.3.3. Justificar la representación por asíntotas en el diagrama de Bode para unaconstante, polos y ceros en el origen, polos y ceros simples y factores cuadráticos.
2.3.4. Realizar el diagrama asintótico de Bode para un sistema a partir del conocimiento de su función de transferencia.
2.4.1. Graficar en coordenadas polares la respuesta en frecuencia de un sistema lineal a partir del conocimiento de la función de transferencia del mismo.
2.4.2. Explicar cuál es el efecto del agregado de polos finitos a una función de

Unidad 4 – Practico Nº 6 y Práctico Nº 7- 2
transferencia sin dinámica de numerador, usando diagramas polares 2.4.3. Explicar cuál es el efecto del agregado de polos en el origen a una función de
transferencia sin dinámica de numerador, usando diagramas polares. 2.4.4. Explicar cuál es el efecto del agregado de ceros finitos a una función de
transferencia usando diagramas polares. 2.5.1. Explicar el procedimiento para obtener la respuesta en frecuencia de un sistema
lineal en forma experimental. 2.5.2. Explicar el procedimiento para obtener la función de transferencia de un sistema
lineal en forma experimental a partir de la graficación de Bode. 3. CONTENIDOS: 3.1 Respuesta en frecuencia de sistemas lineales autónomos. 3.1.1. Descripción de la determinación experimental y analítica de la respuesta en
frecuencia. 3.1.2. Justificación de la sustitución de s por jw. 3.1.3. Obtención de la respuesta en frecuencia a partir de los diagramas de polos y
ceros. 3.1.4. Definición de especificaciones en el dominio frecuencial. 3.1.5. Especificaciones frecuenciales de un sistema de segundo orden y su relación con
el dominio temporal. 3.2. Gráficas rectangulares de respuesta de frecuencia. 3.2.1. Conceptos básicos sobre gráficas rectangulares. 3.2.2. Diagramas de Bode. 3.2.3. Diagramas asintóticos de Bode. Aproximación por asíntotas de constantes, polos
y ceros en el origen, factores de primer orden, factores cuadráticos. Aproximación de la curva real a las asíntotas.
3.2.4. Sistemas de fase mínima y sistemas de fase no mínima. 3.2.5. Comportamiento de los sistemas de fase no mínima. 3.2.6. Representación frecuencial de un retardo puro. 3.2.7. Relación entre el tipo de sistema y la curva de logaritmo de la amplitud. 3.2.8. Determinación de los coeficientes de error de posición Kp. 3.2.9. Determinación de los coeficientes de error de velocidad Kv. 3.3.10. Determinación de los coeficientes de error de aceleración Ka. 3.3. Gráficas polares de respuesta de frecuencia. 3.3.1. Gráficas polares de factores integral y derivativo. 3.3.2. Gráficas polares de factores de primer orden. 3.3.3. Gráficas polares de factores cuadráticos. 3.3.4. Gráfica polar de un retardo puro. 3.3.5. Formas generales de los diagramas polares. 3.3.6. El efecto del agregado de polos finitos a una función de transferencia. 3.3.7. El efecto del agregado de polos en el origen a una función de transferencia. 3.3.8. El efecto del agregado de ceros a una función de transferencia. 3.3.9. Diagramas polares inversos y su utilización. 3.4. Análisis experimental de la respuesta frecuencial. 3.4.1. Obtención de la respuesta en frecuencia experimental de un sistema.

Unidad 4 – Practico Nº 6 y Práctico Nº 7- 3
3.4.2. Determinación experimental de funciones de transferencia. 3.4.3. Procedimiento para obtener la función de transferencia de un sistema lineal en
forma experimental. 3.4.4. Determinación de funciones de transferencia de fase mínima a partir de los
diagramas de Bode. 3.4.5. Determinación de funciones de transferencia de fase no mínima a partir de los
diagramas de Bode. 3.4.6 .Apreciaciones útiles sobre la determinación experimental de la función de
transferencia.
Unidad 4 – Practico Nº 6 y Práctico Nº 7- 4
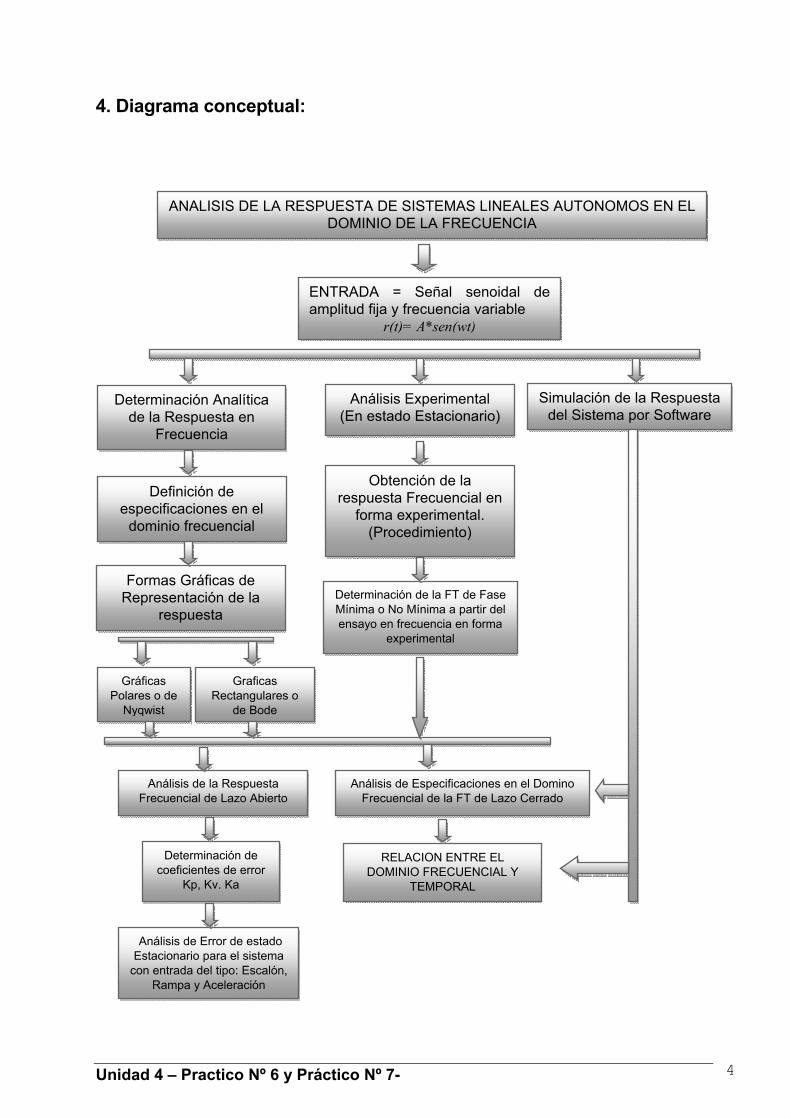
4. Diagrama conceptual:
ANALISIS DE LA RESPUESTA DE SISTEMAS LINEALES AUTONOMOS EN EL DOMINIO DE LA FRECUENCIA
ENTRADA = Señal senoidal de amplitud fija y frecuencia variable
r(t)= A*sen(wt)
Determinación Analítica de la Respuesta en
Frecuencia
Análisis Experimental (En estado Estacionario)
Simulación de la Respuesta del Sistema por Software
Definición de especificaciones en el
dominio frecuencial
Obtención de la respuesta Frecuencial en
forma experimental. (Procedimiento)
Formas Gráficas de Representación de la
respuesta
Gráficas Polares o de
Nyqwist
Graficas Rectangulares o
de Bode
Determinación de la FT de Fase Mínima o No Mínima a partir del ensayo en frecuencia en forma
experimental
Análisis de la Respuesta Frecuencial de Lazo Abierto
Análisis de Especificaciones en el Domino Frecuencial de la FT de Lazo Cerrado
Determinación de coeficientes de error
Kp, Kv. Ka
RELACION ENTRE EL DOMINIO FRECUENCIAL Y
TEMPORAL
Análisis de Error de estado Estacionario para el sistema
con entrada del tipo: Escalón, Rampa y Aceleración

Unidad 4 – Practico Nº 6 y Práctico Nº 7- 5
5. ACTIVIDADES A DESARROLLAR POR EL ALUMNO:
1- Asistir a seis clases semanales teóricas -prácticas tipo conferencias de 45 minutos para aprender los contenidos expuestos 2 -Leer y comprender en la bibliografía y en los apuntes tomados en clase los temas indicados en los contenidos referente a la Unidad de Aprendizaje Nº4. 3- Realizar la actividad de autoevaluación y los ejercicios indicados en la guía de aprendizaje del Práctico Nº 6 4- (una) clase de 135 minutos para evaluar la unidad.

Unidad 4 – Practico Nº 6 y Práctico Nº 7- 6
PRACTICO Nº 6
“REPRESENTACIÓN DE LA RESPUESTA EN FRECUENCIA EN COORDENADAS RECTANGULARES”.
5.1 ACTIVIDADES DE AUTOEVALUACIÓN El alumno deberá responder "si" o "no" a las aseveraciones que a continuación se enuncian, luego de leerlas atentamente: a- El caso más común de gráfica rectangular es la que emplea M(w) en decibeles en
función de log10 w y ángulo de fase M(10) en grados en función de log10 w, conocida con el nombre de diagrama de Bode.
b- La ventaja de los diagramas de Bode respecto a las gráficas polares usadas para el
análisis de respuesta en frecuencia, radica en la facilidad de construcción de los primeros.
c- Otra ventaja de los diagramas de Bode respecto a los diagramas polares es que al
usar una escala logarítmica para las frecuencias, se puede obtener en un sólo diagrama tanto para la magnitud como para la fase las características de alta y baja frecuencia.
d- Debido al uso de escala logarítmica para las frecuencias se logra una expansión del
rango de bajas frecuencias, lo que es útil en el análisis frecuencial de sistemas de control.
e- Dado que las funciones de transferencia de sistemas de control están formadas por
factores que son constantes K, integraciones o derivaciones (s)±n, constantes de tiempo (1 + sT)±n y factores cuadráticos (s2 + 2δwns + wn
2)±n, el diagrama de Bode se puede construir superponiendo el efecto de cada uno de ellos.
f- Conocido el diagrama de Bode de un sistema no se puede determinar a partir del
mismo la función de transferencia. g- La representación asintótica de Bode es una representación que permite dibujar un
diagrama de Bode aproximado al real. h- Cuando se proyectan sistemas de control siempre se usa la representación exacta de
Bode y no la aproximada, para evitar grandes errores en las mediciones. i- Dibujado un diagrama de Bode asintótico, la curva real sólo se puede obtener a partir
de las gráficas de error cuando todas las frecuencias esquinas están separadas por lo menos por una década.
j- Cuando se aproxima por asíntotas el diagrama de Bode de un factor cuadrático, el
mayor error se comete en la frecuencia esquina W igual a la frecuencia natural de
Unidad 4 – Practico Nº 6 y Práctico Nº 7- 7
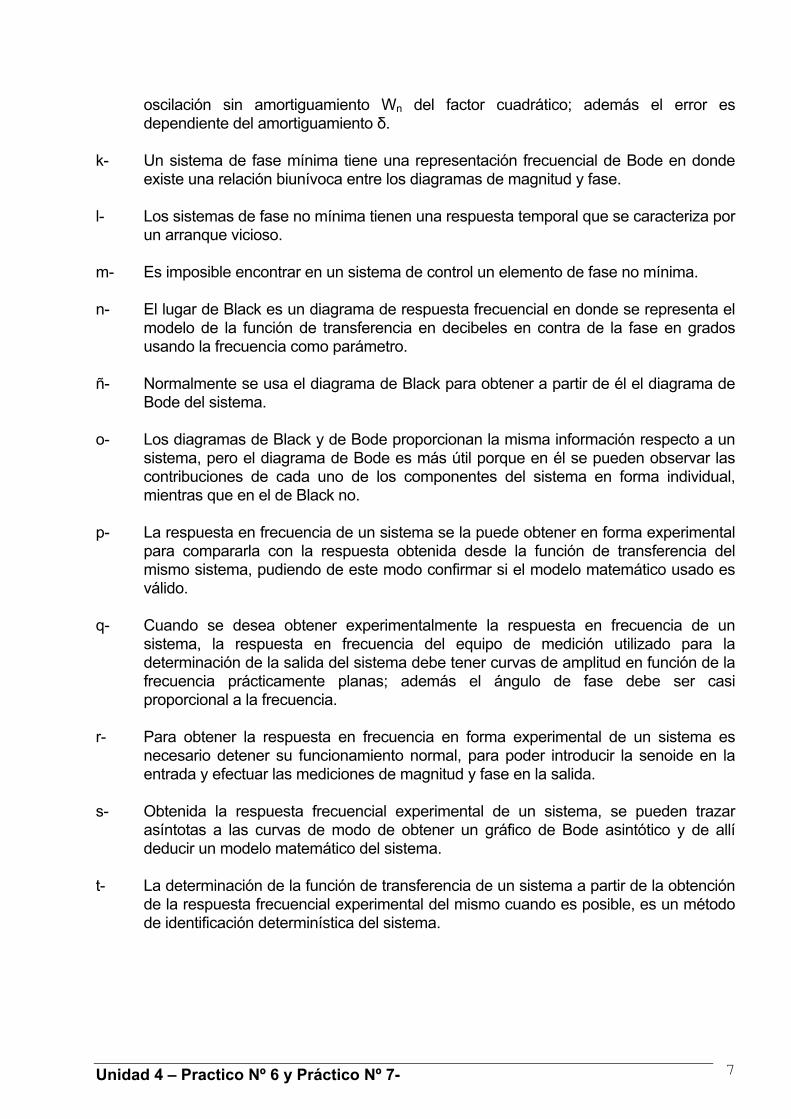
oscilación sin amortiguamiento Wn del factor cuadrático; además el error es dependiente del amortiguamiento δ.
k- Un sistema de fase mínima tiene una representación frecuencial de Bode en donde
existe una relación biunívoca entre los diagramas de magnitud y fase. l- Los sistemas de fase no mínima tienen una respuesta temporal que se caracteriza por
un arranque vicioso. m- Es imposible encontrar en un sistema de control un elemento de fase no mínima. n- El lugar de Black es un diagrama de respuesta frecuencial en donde se representa el
modelo de la función de transferencia en decibeles en contra de la fase en grados usando la frecuencia como parámetro.
ñ- Normalmente se usa el diagrama de Black para obtener a partir de él el diagrama de
Bode del sistema. o- Los diagramas de Black y de Bode proporcionan la misma información respecto a un
sistema, pero el diagrama de Bode es más útil porque en él se pueden observar las contribuciones de cada uno de los componentes del sistema en forma individual, mientras que en el de Black no.
p- La respuesta en frecuencia de un sistema se la puede obtener en forma experimental
para compararla con la respuesta obtenida desde la función de transferencia del mismo sistema, pudiendo de este modo confirmar si el modelo matemático usado es válido.
q- Cuando se desea obtener experimentalmente la respuesta en frecuencia de un
sistema, la respuesta en frecuencia del equipo de medición utilizado para la determinación de la salida del sistema debe tener curvas de amplitud en función de la frecuencia prácticamente planas; además el ángulo de fase debe ser casi proporcional a la frecuencia.
r- Para obtener la respuesta en frecuencia en forma experimental de un sistema es
necesario detener su funcionamiento normal, para poder introducir la senoide en la entrada y efectuar las mediciones de magnitud y fase en la salida.
s- Obtenida la respuesta frecuencial experimental de un sistema, se pueden trazar
asíntotas a las curvas de modo de obtener un gráfico de Bode asintótico y de allí deducir un modelo matemático del sistema.
t- La determinación de la función de transferencia de un sistema a partir de la obtención
de la respuesta frecuencial experimental del mismo cuando es posible, es un método de identificación determinística del sistema.

Unidad 4 – Practico Nº 6 y Práctico Nº 7- 8
Autocorrección de las aseveraciones del Práctico Nº 6 a - si f - no k - si o - si b - si g - si l - si p - si c - no h - no m - no q - si d - si i - no n - si r - no e - si j - si ñ - no s - si 5.2- EJERCICIOS: Ejercicio Nº 1: a) Dada las siguientes F.T.L.C (S), para cada caso trazar el diagrama asintótico de
módulo y el grosero. Luego trazar en forma aproximada la curva real de módulo y fase.
1.1. )10)(2(
20++
=ss
FTLC
1.2. )10)(2(
20.++
=sss
HG
1.3. )10)(2(
)1(20+++
=ss
sFTLC
1.4 )52(
152 ++
=ss
FTLC
1.5 )52(
152 ++−
=ss
FTLC
Ejercicio Nº 2: a) Dada la siguiente F.T.L.C (S), trazar el diagrama asintótico de módulo y el grosero de
fase.
b) Trazar en forma aproximada la curva real de módulo y fase. c) Marcar en la curva real el Máximo de resonancia (MR) y la frecuencia de resonancia
(wR), Indicar en forma aproximada su valor. d) Trazar el ancho de Banda del sistema e indicar en forma aproximada su valor.
)*01.01(*)50(*)*1.01()20(*200
)()()(
SSSS
SRSCSM
++++
==
Unidad 4 – Practico Nº 6 y Práctico Nº 7- 9
100 101 102 103-20
-10
0
10
20
30
40
Mag
nitu
de, d
B
Closed-Loop (T) System
100 101 102 103-200
-150
-100
-50
0
Deg
rees
Frequency in Rad/s
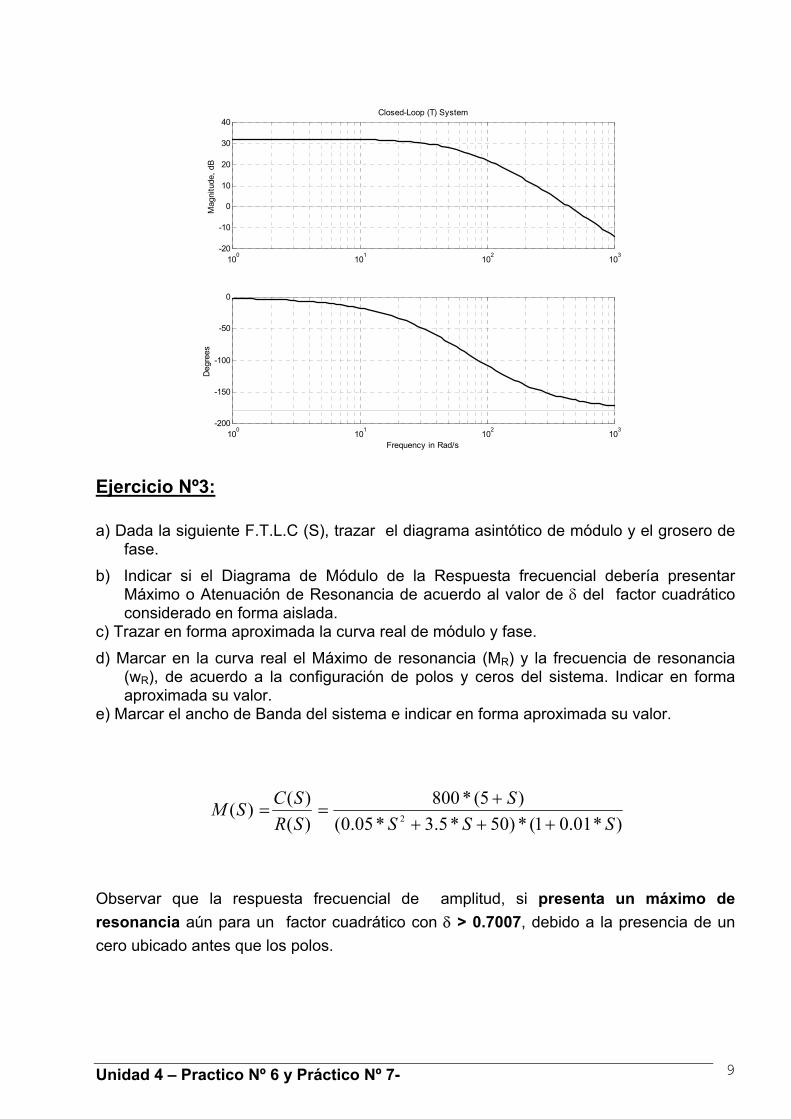
Ejercicio Nº3: a) Dada la siguiente F.T.L.C (S), trazar el diagrama asintótico de módulo y el grosero de
fase.
b) Indicar si el Diagrama de Módulo de la Respuesta frecuencial debería presentar Máximo o Atenuación de Resonancia de acuerdo al valor de δ del factor cuadrático considerado en forma aislada.
c) Trazar en forma aproximada la curva real de módulo y fase.
d) Marcar en la curva real el Máximo de resonancia (MR) y la frecuencia de resonancia (wR), de acuerdo a la configuración de polos y ceros del sistema. Indicar en forma aproximada su valor.
e) Marcar el ancho de Banda del sistema e indicar en forma aproximada su valor.
)*01.01(*)50*5.3*05.0()5(*800
)()()(
2 SSSS
SRSCSM
++++
==
Observar que la respuesta frecuencial de amplitud, si presenta un máximo de resonancia aún para un factor cuadrático con δ > 0.7007, debido a la presencia de un cero ubicado antes que los polos.
Unidad 4 – Practico Nº 6 y Práctico Nº 7- 10
100
101
102
103
104
-20
0
20
40
60
Mag
nitu
de,
dB
Closed-Loop (T) System
100
101
102
103
104
-200
-150
-100
-50
0
50
Deg
rees
Frequency in Rad/s
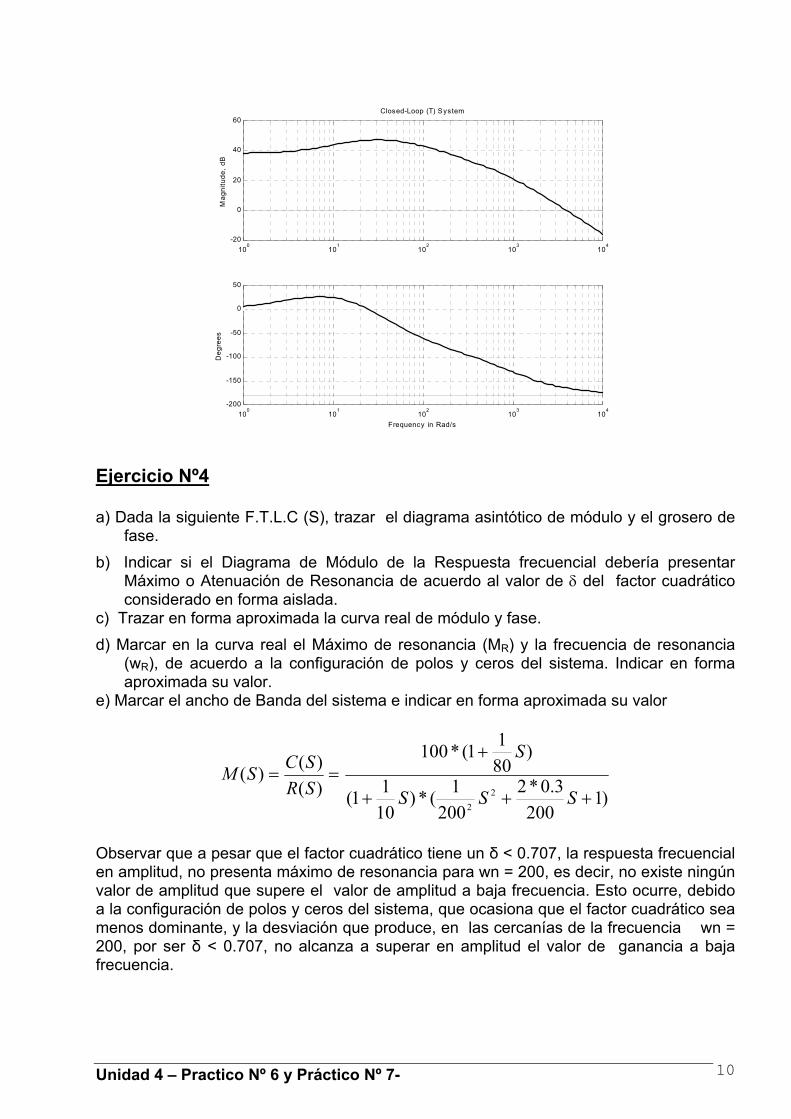
Ejercicio Nº4 a) Dada la siguiente F.T.L.C (S), trazar el diagrama asintótico de módulo y el grosero de
fase.
b) Indicar si el Diagrama de Módulo de la Respuesta frecuencial debería presentar Máximo o Atenuación de Resonancia de acuerdo al valor de δ del factor cuadrático considerado en forma aislada.
c) Trazar en forma aproximada la curva real de módulo y fase.
d) Marcar en la curva real el Máximo de resonancia (MR) y la frecuencia de resonancia (wR), de acuerdo a la configuración de polos y ceros del sistema. Indicar en forma aproximada su valor.
e) Marcar el ancho de Banda del sistema e indicar en forma aproximada su valor
)12003.0*2
2001(*)
1011(
)8011(*100
)()()(
22
+++
+==
SSS
S
SRSCSM
Observar que a pesar que el factor cuadrático tiene un δ < 0.707, la respuesta frecuencial en amplitud, no presenta máximo de resonancia para wn = 200, es decir, no existe ningún valor de amplitud que supere el valor de amplitud a baja frecuencia. Esto ocurre, debido a la configuración de polos y ceros del sistema, que ocasiona que el factor cuadrático sea menos dominante, y la desviación que produce, en las cercanías de la frecuencia wn = 200, por ser δ < 0.707, no alcanza a superar en amplitud el valor de ganancia a baja frecuencia.
Unidad 4 – Practico Nº 6 y Práctico Nº 7- 11
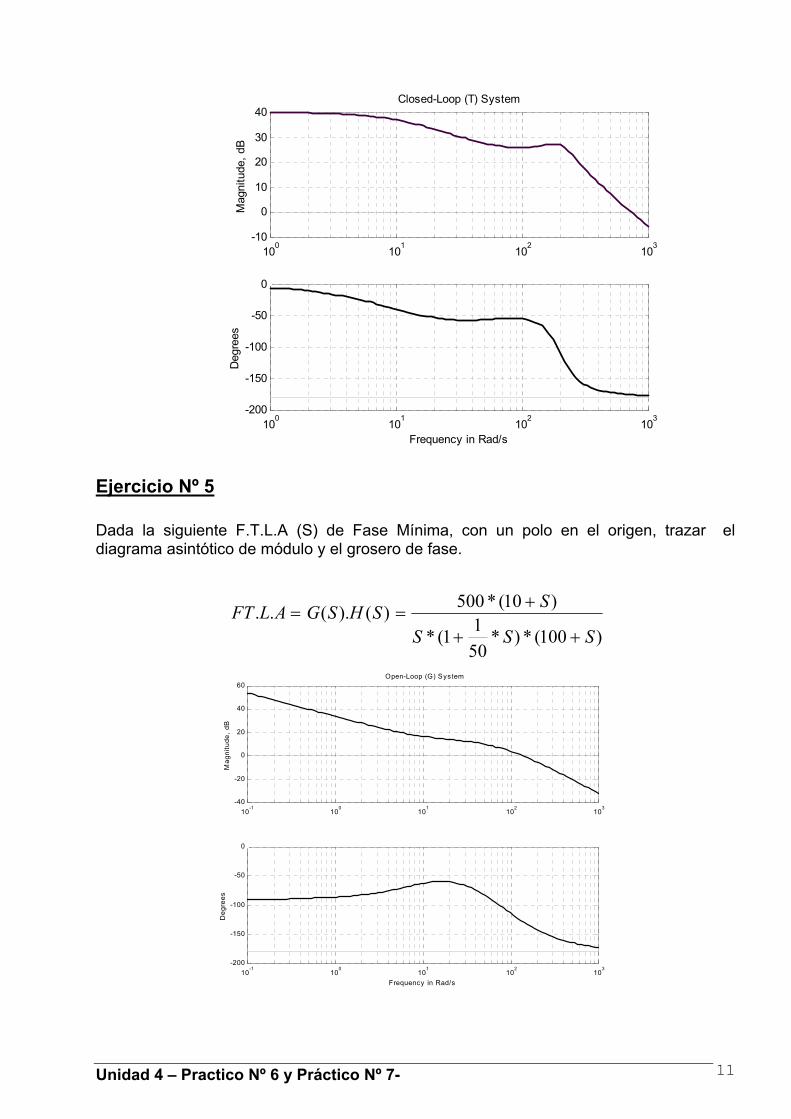
Ejercicio Nº 5 Dada la siguiente F.T.L.A (S) de Fase Mínima, con un polo en el origen, trazar el diagrama asintótico de módulo y el grosero de fase.
)100(*)*5011(*
)10(*500)().(..SSS
SSHSGALFT++
+==
10-1
100
101
102
103
-40
-20
0
20
40
60
Mag
nitu
de,
dB
Open-Loop (G) System
10-1
100
101
102
103
-200
-150
-100
-50
0
Deg
rees
Frequency in Rad/s
100
101
102
103
-10
0
10
20
30
40
Mag
nitu
de, d
B
Closed-Loop (T) System
100
101
102
103
-200
-150
-100
-50
0
Deg
rees
Frequency in Rad/s
Unidad 4 – Practico Nº 6 y Práctico Nº 7- 12
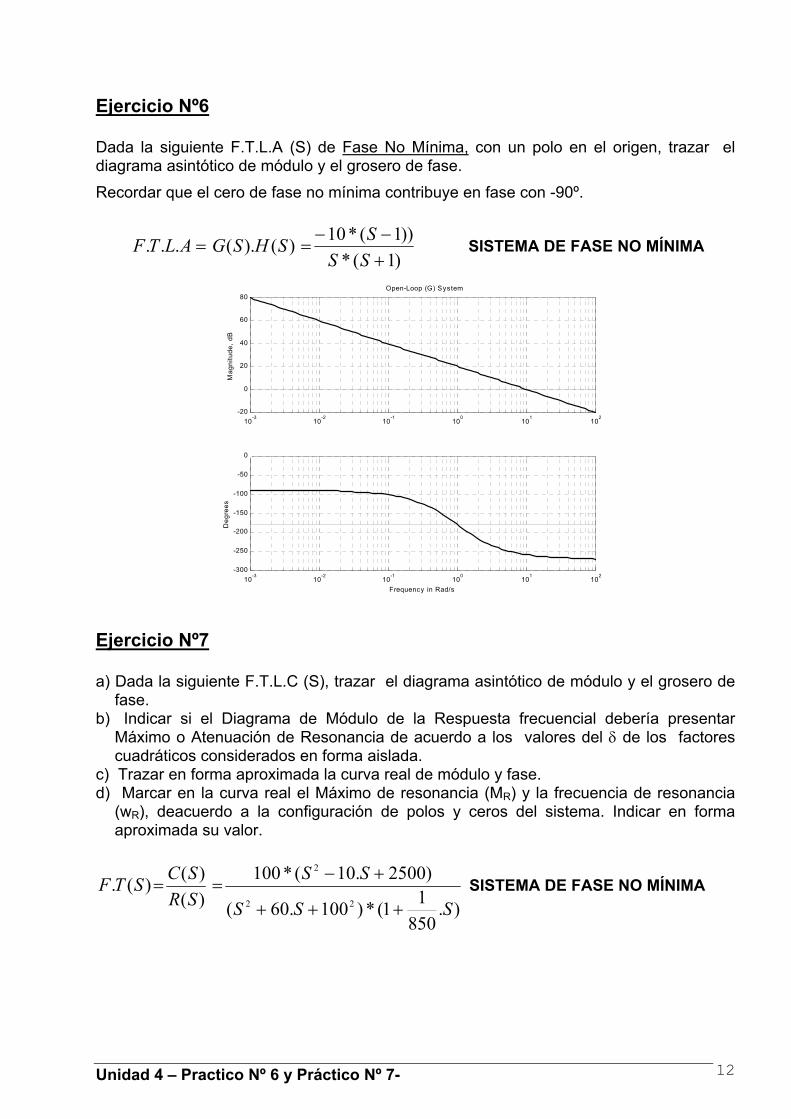
Ejercicio Nº6 Dada la siguiente F.T.L.A (S) de Fase No Mínima, con un polo en el origen, trazar el diagrama asintótico de módulo y el grosero de fase.
Recordar que el cero de fase no mínima contribuye en fase con -90º.
)1(*))1(*10)().(...
+−−
==SSSSHSGALTF SISTEMA DE FASE NO MÍNIMA
10-3
10-2
10-1
100
101
102
-20
0
20
40
60
80
Mag
nitu
de,
dB
Open-Loop (G) System
10-3
10-2
10-1
100
101
102
-300
-250
-200
-150
-100
-50
0
Deg
rees
Frequency in Rad/s
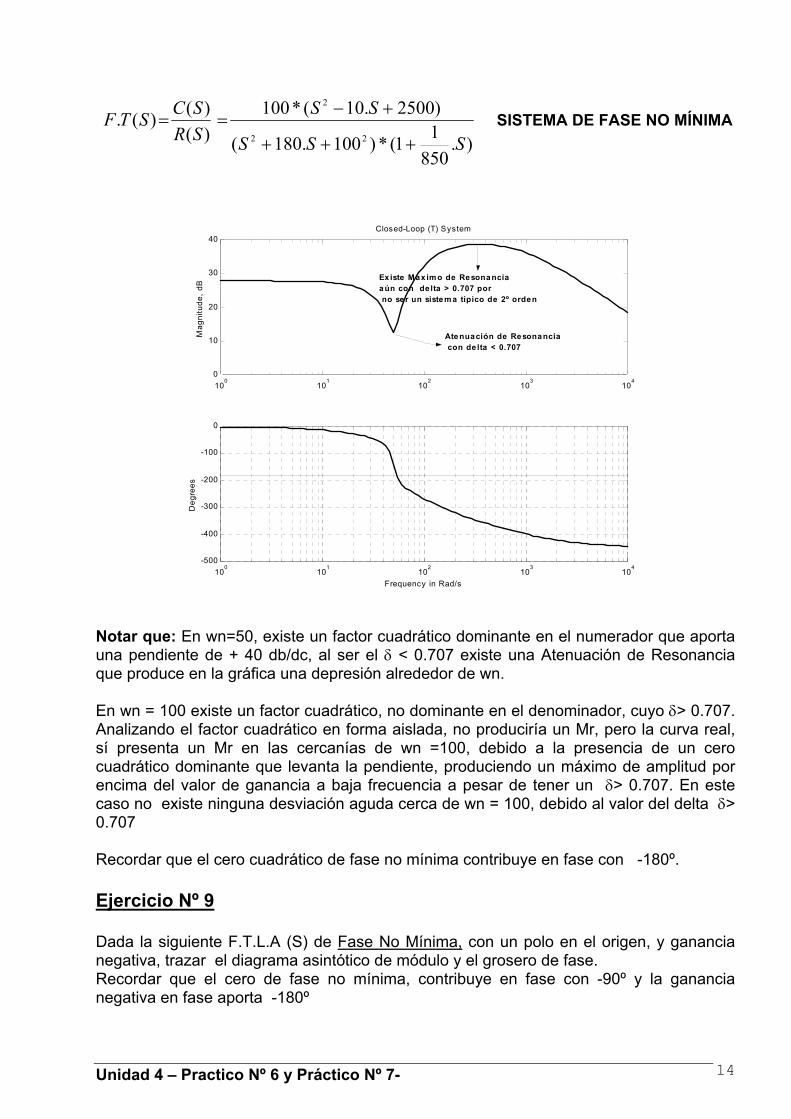
Ejercicio Nº7 a) Dada la siguiente F.T.L.C (S), trazar el diagrama asintótico de módulo y el grosero de
fase. b) Indicar si el Diagrama de Módulo de la Respuesta frecuencial debería presentar
Máximo o Atenuación de Resonancia de acuerdo a los valores del δ de los factores cuadráticos considerados en forma aislada.
c) Trazar en forma aproximada la curva real de módulo y fase. d) Marcar en la curva real el Máximo de resonancia (MR) y la frecuencia de resonancia
(wR), deacuerdo a la configuración de polos y ceros del sistema. Indicar en forma aproximada su valor.
).85011(*)100.60(
)2500.10(*100)()()(.
22
2
SSS
SSSRSCSTF
+++
+−== SISTEMA DE FASE NO MÍNIMA

Unidad 4 – Practico Nº 6 y Práctico Nº 7- 13
100
101
102
103
104
0
10
20
30
40
50
Mag
nitu
de,
dB
Closed-Loop (T) System
100
101
102
103
104
-500
-400
-300
-200
-100
0
Deg
rees
Frequency in Rad/s
Maxim o de Resonanciade lta < 0.707
Atenuación de Resonancia por ser de lta < 0.707
Notar que: En wn=50, existe un factor cuadrático dominante en el numerador que aporta una pendiente de + 40 db/dc, al ser el δ < 0.707 y el factor cuadrático dominante, existe una Atenuación de Resonancia que produce en la gráfica una depresión alrededor de wn. En wn = 100 existe un factor cuadrático, no dominante en el denominador, cuyo δ< 0.707, lo cual analizado aisladamente sí produciría un Mr. La curva real, si presenta un Mr en las cercanías de wn =100, aunque el factor sea no dominante, debido a la presencia de un cero cuadrático dominante que levanta la pendiente, produciendo un máximo de amplitud por encima del valor de ganancia a baja frecuencia. Simultáneamente existe un pequeña desviación cerca de wn = 100, debido al valor del delta (δ< 0.707). Recordar que el cero cuadrático de fase no mínima contribuye en fase con -180º. Ejercicio Nº8 a) Dada la siguiente F.T.L.C (S), trazar el diagrama asintótico de módulo y el grosero de
fase. b) Indicar si el Diagrama de Módulo de la Respuesta frecuencial debería presentar
Máximo o Atenuación de Resonancia de acuerdo a los valores del δ de los factores cuadráticos considerados en forma aislada.
c) Trazar en forma aproximada la curva real de módulo y fase. d) Marcar en la curva real el Máximo de resonancia (MR) y la frecuencia de resonancia
(wR), de acuerdo a la configuración de polos y ceros del sistema. Indicar en forma aproximada su valor.
Unidad 4 – Practico Nº 6 y Práctico Nº 7- 14
).
85011(*)100.180(
)2500.10(*100)()()(.
22
2
SSS
SSSRSCSTF
+++
+−== SISTEMA DE FASE NO MÍNIMA
100
101
102
103
104
0
10
20
30
40
Mag
nitu
de,
dB
Closed-Loop (T) System
100
101
102
103
104
-500
-400
-300
-200
-100
0
Deg
rees
Frequency in Rad/s
Ex iste Max im o de Resonanciaaún con de lta > 0.707 por no ser un sistem a típico de 2º orden
Atenuación de Resonancia con de lta < 0.707
Notar que: En wn=50, existe un factor cuadrático dominante en el numerador que aporta una pendiente de + 40 db/dc, al ser el δ < 0.707 existe una Atenuación de Resonancia que produce en la gráfica una depresión alrededor de wn. En wn = 100 existe un factor cuadrático, no dominante en el denominador, cuyo δ> 0.707. Analizando el factor cuadrático en forma aislada, no produciría un Mr, pero la curva real, sí presenta un Mr en las cercanías de wn =100, debido a la presencia de un cero cuadrático dominante que levanta la pendiente, produciendo un máximo de amplitud por encima del valor de ganancia a baja frecuencia a pesar de tener un δ> 0.707. En este caso no existe ninguna desviación aguda cerca de wn = 100, debido al valor del delta δ> 0.707 Recordar que el cero cuadrático de fase no mínima contribuye en fase con -180º. Ejercicio Nº 9 Dada la siguiente F.T.L.A (S) de Fase No Mínima, con un polo en el origen, y ganancia negativa, trazar el diagrama asintótico de módulo y el grosero de fase. Recordar que el cero de fase no mínima, contribuye en fase con -90º y la ganancia negativa en fase aporta -180º

Unidad 4 – Practico Nº 6 y Práctico Nº 7- 15
SISTEMA DE FASE NO MÍNIMA Y GANANCIA NEGATIVA
)1(*)100(*)*5011(*
)1(*)10(*500)()()(...SSSS
SSSHSGSALTF+++
−+−==
El diagrama de fase debería comenzar en -270º pero matlab lo grafica en +90º, por ser ángulos que difieren en 360º. Ejercicio Nº 10 Dada la siguiente F.T.L.A (S) de Fase No Mínima, con un polo en el origen y ganancia negativa, trazar el diagrama asintótico de módulo y el grosero de fase.
Recordar que el cero de fase no mínima contribuye en fase con -90º y La ganancia negativa en fase aporta -180º.
2)50(*)10(*)*20011(*
)500(*)10(*100)(.)(...+++
+−==
SSSS
SSSHSGALTF
SISTEMA DE FASE NO MÍNIMA Y GANANCIA NEGATIVA
10-1
100
101
102
103
-40
-20
0
20
40
60
Magnitude,dB
Open-Loop (G) System
10-1
100
101
102
103
-200
-150
-100
-50
0
50
100
Degrees
Frequency in Rad/s

Unidad 4 – Practico Nº 6 y Práctico Nº 7- 16
El diagrama de fase debería comenzar en -270º pero matlab lo grafica en +90º, por ser ángulos que difieren en 360º. Ejercicio Nº 11 Dada la siguiente F.T.L.A (S) de Fase No Mínima, con dos polos en el origen y ganancia positiva, trazar el diagrama asintótico de módulo y el grosero de fase.
Recordar que el polo doble en el origen, contribuye en fase con -180º Y que el polo de fase no mínima contribuye en fase con +90º.
)500(*)10(*)1*2001(*
)80(*)1(*1000)(.)()(...2 ++−
++−==
SSSS
SSSHSGSALTF
SISTEMA DE FASE NO MÍNIMA CON GANANCIA POSITIVA
10-1 100 101 102 103 104-200
-150
-100
-50
0
50
Mag
nitu
de, d
B
Open-Loop (G) System
10-1 100 101 102 103 104-400
-300
-200
-100
0
100
Deg
rees
Frequency in Rad/s

Unidad 4 – Practico Nº 6 y Práctico Nº 7- 17
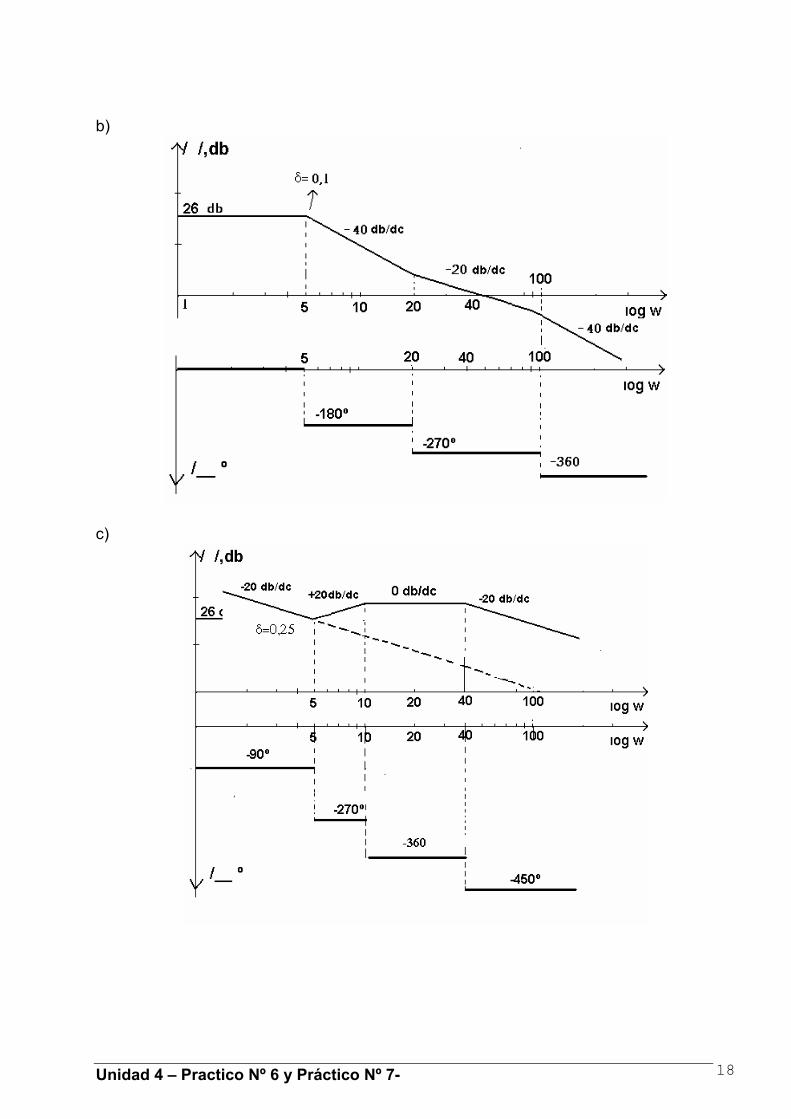
Ejercicio Nº 12: Obtener a partir de los siguientes diagramas asintóticos de atenuación de Bode y de Fase, la Función de Transferencia correspondiente a los mismos. Estos diagramas se obtuvieron a partir de curvas reales conseguidas de un ensayo experimental en el dominio de la frecuencia. a)
10-1 100 101 102 103 104-150
-100
-50
0
50
100
Mag
nitu
de, d
B
Open-Loop (G) System
10-1
100
101
102
103
104
-200
-150
-100
-50
0
Deg
rees
Frequency in Rad/s
Unidad 4 – Practico Nº 6 y Práctico Nº 7- 18
b)
c)

Unidad 4 – Practico Nº 6 y Práctico Nº 7- 19
PRACTICO Nº 7
“REPRESENTACIÓN DE LA RESPUESTA EN FRECUENCIA EN COORDENADAS POLARES”.
5.1 ACTIVIDADES DE AUTOEVALUACIÓN El alumno deberá responder "si" o "no" a las aseveraciones que a continuación se enuncian, luego de leerlas atentamente: a- La determinación de respuesta en frecuencia sólo es posible realizarla cuando el sistema
es estable. b- Dado un sistema de control automático de lazo cerrado lineal, sólo es posible realizar el
análisis de respuesta en frecuencia del mismo cuando todos los componentes que lo constituyen son estables.
c- Para realizar el análisis de frecuencia de sistemas lineales se realiza la sustitución de s por jw en la función de transferencia porque ello es equivalente a introducir en la entrada del sistema una senoide de amplitud constante.
d- Realizar el análisis de respuesta en frecuencia para un sistema lineal es equivalente a dar valores a la variable s en el plano complejo desde el origen hasta w → ∞ sobre el eje imaginario, cuando se conoce la función de transferencia.
e- En el análisis de respuesta en frecuencia interesa el estudio de la relación entre las amplitudes de entrada y salida en función de la frecuencia y de la fase de la salida respecto a la entrada en función de la frecuencia.
f- Para sistemas físicos el desfasaje entre la salida y la entrada es en adelanto cuando la frecuencia tiende al infinito.
g- Las especificaciones de respuesta en frecuencia se pueden relacionar siempre con el dominio temporal mediante expresiones matemáticas de fácil obtención.
h- Si un sistema tiene un ancho de banda grande tendrá una respuesta en el dominio temporal rápida.
i- Si el máximo de resonancia de un sistema es grande, la respuesta temporal tendrá un máximo sobreimpulso también grande.
j- Si la función de transferencia de un sistema no tiene dinámica de numerador, el gráfico polar de respuesta en frecuencia, cuando ésta varía de cero a infinito, pasa por un número de cuadrantes igual al número de constantes de tiempo.
k- Agregar m polos a la función de transferencia de un sistema es hacer rotar el diagrama polar en las altas frecuencias m x 90° en sentido horario.

Unidad 4 – Practico Nº 6 y Práctico Nº 7- 20
5.2-EJERCICIOS: Ejercicio Nº1: Encontrar la respuesta frecuencial en coordenadas polares de las Funciones de Transferencia de Fase Mínima y sin dinámica en el numerador que se dan a continuación, partiendo de un bosquejo previo de módulo y fase en coordenadas rectangulares.(Bode)
)*01.01(*)5(*)10(50
)()()()
SSSSRSCSMa
+++==−
)25(*)*01.01(*)*02.01(*)10(250
)()()()
SSSSSRSCSMb
++++==−
)*01.01(*)25(*)10(*100
)()()(*)()
SSSSSESBSHSGc
+++==−
)*01.01(*)25(*)10(*100
)()()(*)()
2 SSSSSESBSHSGd
+++==−
)*01.01(*)25(*)10(*250
)()()(*)()
2 SSSSSESBSHSGe
+++==−
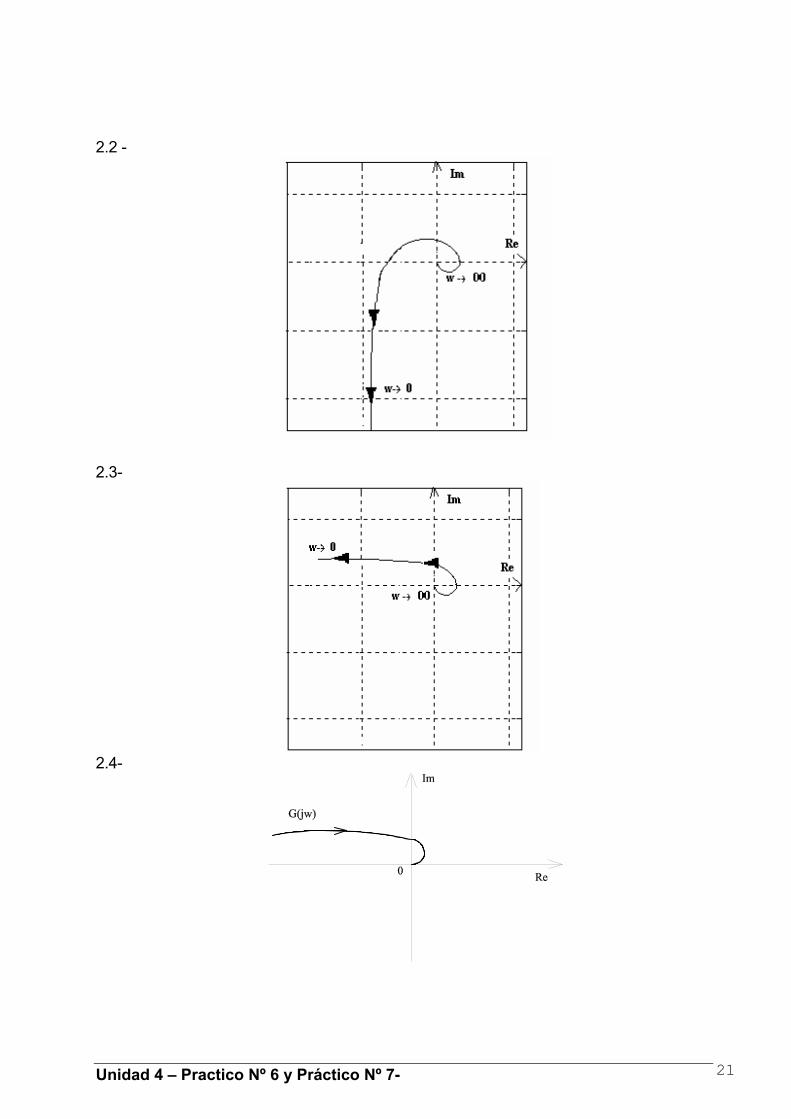
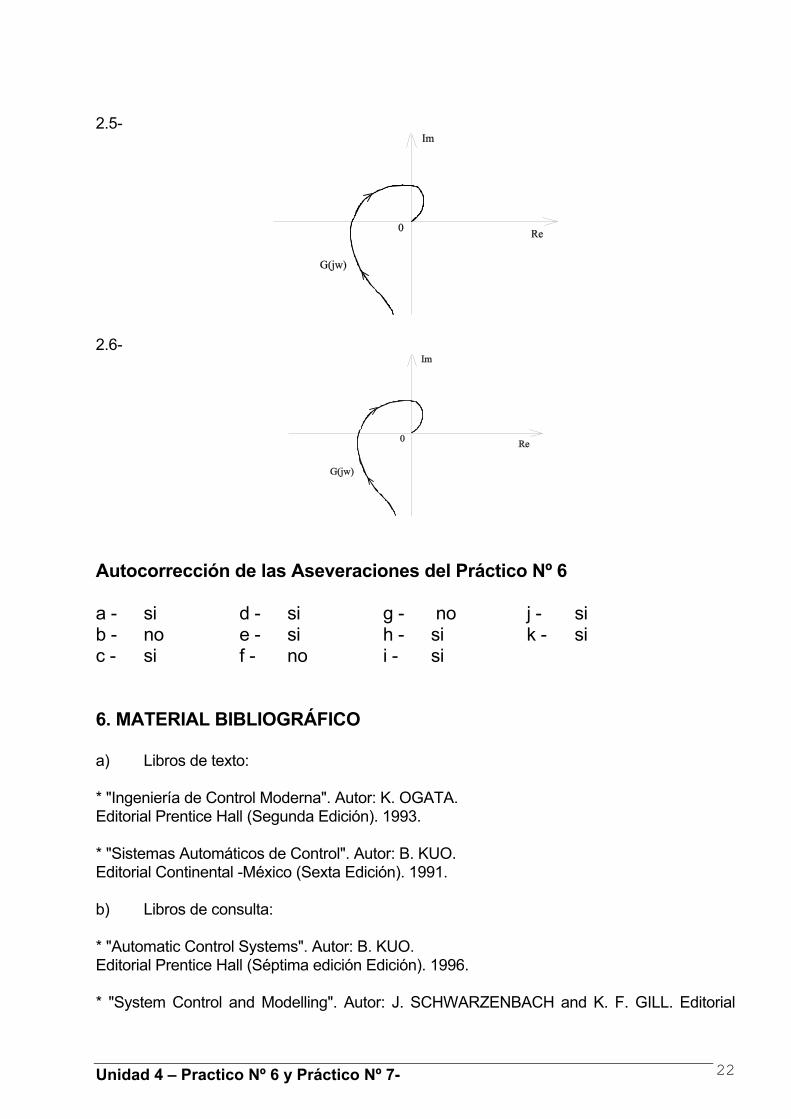
Ejercicio Nº2: Encontrar la Función de Transferencia de Fase Mínima de un Sistema, en forma normalizada de constantes de tiempo genéricas. La función de transferencia no posee dinámica en el numerador, cuya respuesta en frecuencia en coordenadas polares es la siguiente: 2.1-
-2 0 2 4 6 8 10-7
-6
-5
-4
-3
-2
-1
0
DIAGRAMA POLAR DE UNA FUNCIÓN DE TRA NSFERENCIA SIN DINÁ MICA EN EL NUMERA DOR
Real
Imag
inar
io
Unidad 4 – Practico Nº 6 y Práctico Nº 7- 21
2.2 -
2.3-
2.4-
Unidad 4 – Practico Nº 6 y Práctico Nº 7- 22
2.5-
2.6-
Autocorrección de las Aseveraciones del Práctico Nº 6 a - si d - si g - no j - si b - no e - si h - si k - si c - si f - no i - si 6. MATERIAL BIBLIOGRÁFICO a) Libros de texto: * "Ingeniería de Control Moderna". Autor: K. OGATA. Editorial Prentice Hall (Segunda Edición). 1993. * "Sistemas Automáticos de Control". Autor: B. KUO. Editorial Continental -México (Sexta Edición). 1991. b) Libros de consulta: * "Automatic Control Systems". Autor: B. KUO. Editorial Prentice Hall (Séptima edición Edición). 1996. * "System Control and Modelling". Autor: J. SCHWARZENBACH and K. F. GILL. Editorial
Unidad 4 – Practico Nº 6 y Práctico Nº 7- 23
SIEMENS. 1984. c) Apuntes de Cátedra: * "Respuesta en Frecuencia de Sistemas Lineales". Autor: Ing. Mario A. Pérez López. 1982. d) Revistas: * "Control Systems Magazine". Publicación periódica de IEEE. Sociedad de Control Automático. USA. * "Telegráfica Electrónica". Publicación mensual de la Editorial Arbó. Bs. As. ARGENTINA. * "Instrumentación, Medición & Control - Automatización". Publicación periódica de la Editorial Control S.R.L. - Bs. As. ARGENTINA. * "Control Engineering". Publicación mensual de la Editorial Cahners Publishing. The Netherlands (Holanda).

![(SP) [Ovni] - Bob Lazar - Tecnologia Alien (PDF).pdf](https://static.fdocuments.es/doc/165x107/55cf997f550346d0339dac94/sp-ovni-bob-lazar-tecnologia-alien-pdfpdf.jpg)