Proyecto final Maquetas - raulsolbes.files.wordpress.com · A través de google Drive creamos...
14
Sistemas Secuenciales Programables / Proyecto final 1er año ARI Proyecto final Maquetas Sistemas Secuenciales Programables Automatización y Robótica Industrial 1062015 1
-
Upload
hoangnguyet -
Category
Documents
-
view
214 -
download
0
Transcript of Proyecto final Maquetas - raulsolbes.files.wordpress.com · A través de google Drive creamos...

Sistemas Secuenciales Programables / Proyecto final 1er año ARI
Proyecto final Maquetas
Sistemas Secuenciales Programables Automatización y Robótica Industrial
1062015
1
Sistemas Secuenciales Programables / Proyecto final 1er año ARI
ÍNDICE DE CONTENIDOS:
QUIENES SOMOS?
COMPONENTES ORGANIZACIÓN
MEMORIA DESCRIPTIVA. PROBLEMA PROPUESTO. ¿ QUÉ ES? ¿ CÓMO FUNCIONA ? PARA QUE LO PODRÍAMOS UTILIZAR ?
MATERIALES. MEJORAS INCORPORADAS MATERIALES DE LAS ESTACIONES
ESQUEMAS. GRAFCETS SEE ELECTRICAL
EJECUCIÓN TUTORIAL LOGO TUTORIAL CODESYS TUTORIAL MCLAB VIDEO PROYECTO FINAL
PROPUESTAS DE MEJORA. DIFICULTADES. VALORACIÓN PERSONAL.
2
Sistemas Secuenciales Programables / Proyecto final 1er año ARI
1. QUIENES SOMOS?
1.1. COMPONENTES El grupo consta de 12 estudiantes, del ciclo Automatización y Robótica Industrial
(ARI), que han realizado una práctica conjunta a partir de su proyecto de final de curso individual, estos proyectos son:
El pulpo. La clasificadora automática. La tapadora automática.
Para ello hemos tenido que juntar todos nuestros conocimientos y cualidades para
hacer un proyecto completo, con las partes completas de documentación, montaje y puesta en marcha.
1.2. ORGANIZACIÓN
El grupo se ha organizado rápidamente porque como no se dispone de mucho tiempo hemos utilizado herramientas online para poder trabajar y modificar el trabajo cada uno en su casa sin encontrarse en la necesidad de esperarse a la próxima clase para comparar resultados y opiniones. A través de google Drive creamos nuestra memoria de proyecto final del 1er año.
2. MEMORIA DESCRIPTIVA.
2.1. PROBLEMA PROPUESTO. El problema que se nos propone a los miembros de los tres grupos, es el de realizar
una práctica conjunta donde intervengan las 3 maquetas, el pulpo, la clasificadora automática y la tapadora automática.
Todas estas maquetas deben entrar en acción e implementarse entre sí, con lo que los 3 grupos y todos los componentes del mismo deberemos trabajar en equipo compartiendo ideas y propuestas.
2.2. ¿ QUÉ ES? Estas 3 maquetas automáticas de FESTO contienen características,materiales y
funciones diferentes pero agrupandolas trataremos de transformarla en una función común y única.
Las 3 maquetas son automáticas y contienen cables universales, algunas de ellas contienen parte neumática y eléctrica.
3
Sistemas Secuenciales Programables / Proyecto final 1er año ARI
2.3. ¿ CÓMO FUNCIONA ? El proceso de esta práctica tiene su orden propuesto por todos los miembros de las
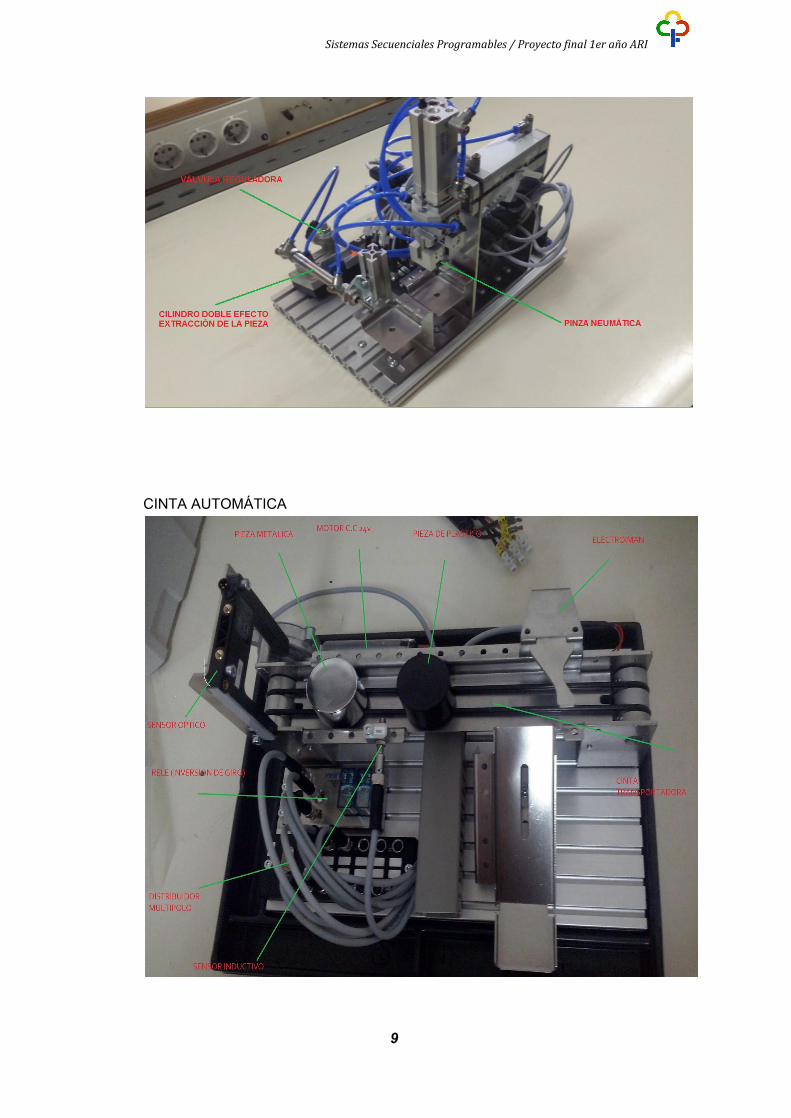
3 maquetas, comenzaremos por el pulpo que dará paso a la clasificadora automática que a su su vez terminará con la última función donde el encargado será la tapadora automática. Con lo cual el proceso se iniciará de la manera siguiente: 1. Al colocar la pieza en el espacio pertinente en el pulpo y al iniciar la programación la
pinza bajara y cogerá esta pieza, una vez sujetada la pinza volverá a subir y la deposita en otro lugar donde una vez colocada entrará en acción un pistón que desplazará esta pieza a la segunda maqueta, la clasificadora automática.
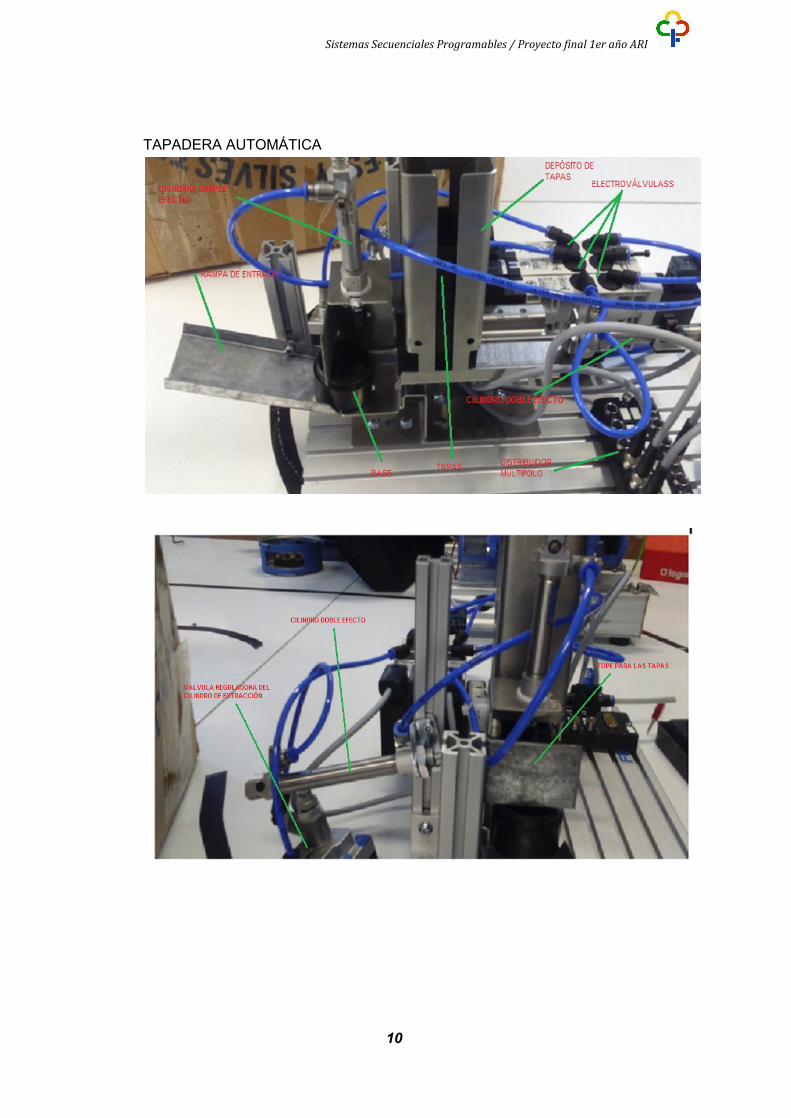
2. La primera función de la clasificadora automática será detectar la pieza mediante un
sensor óptico que pondrá en marcha la cinta transportadora, es aquí donde entra en funcionamiento el sensor inductivo que diferenciara las piezas metálicas de las de plástico y mediante un electroimán las separará, las piezas metálicas que son las que lograran pasar serán enviadas mediante una trampilla a la tercera y última maqueta, la taponadora automática.
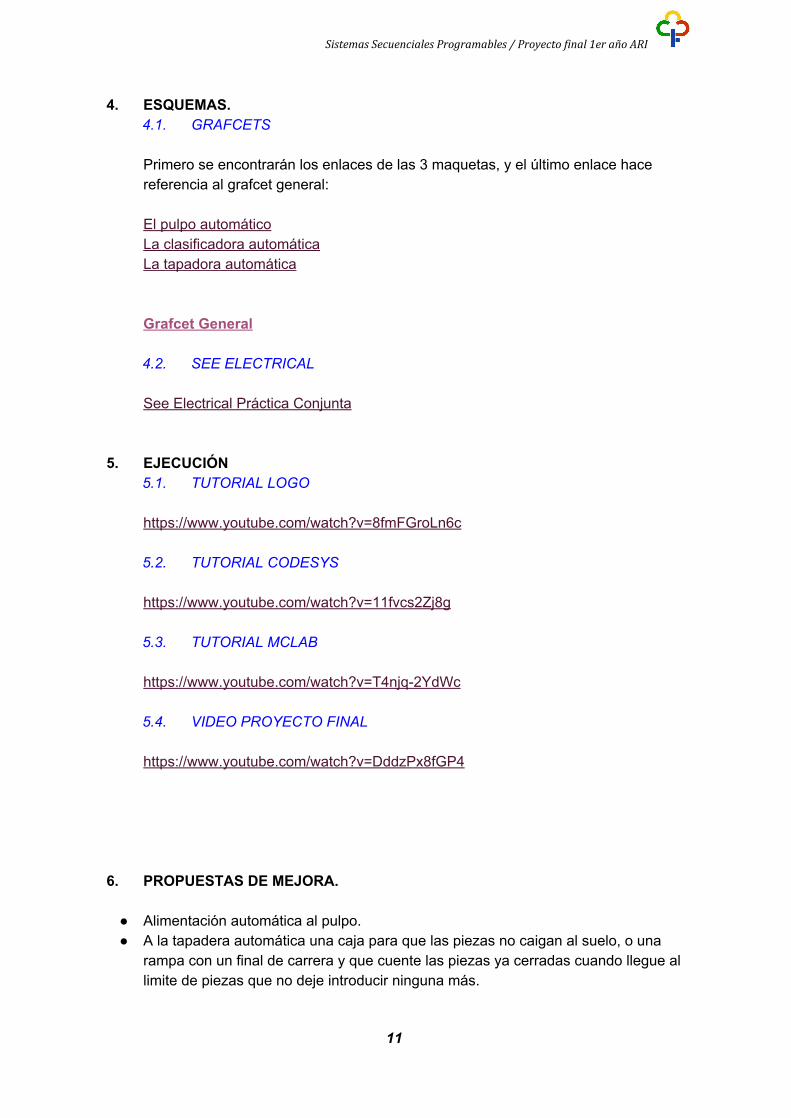
3. La tapadora,una vez se acabe el proceso en la cinta, tendrá la pieza en su hueco
donde mediante un temporizador se activará un cilindro de simple efecto cuyo objetivo será el de taponar la pieza y una vez tapada se activará un pistón que empujará dicha pieza para seguir con el proceso.
2.4. ¿PARA QUE LO PODRÍAMOS UTILIZAR ?
Esta maqueta podría tener diversas funciones de utilización. En primer lugar para lo que está destinada en estos momentos: que se
recojan las piezas y se depositen en una cinta transportadora que desecha las de metal mientras las válidas continúan a la tapadera donde es depositada la tapa y por presión se cierran los botes.
Otra de las opciones sería en la misma función pero con llenado incorporado en la cinta.
En tercer lugar en la tapadera se podría sustituir el pistón con el que se presionan las tapas por un taladro o poner pegatinas, pistola de pegamento…
La cinta podría discriminar las piezas según color incorporando a la maqueta sensores de color; según su tamaño con sensores de infrarrojos; por el líquido que llevasen dentro (en caso de que fueran llenos de líquido) gracias a un sensor de ultrasonidos,etc.
La parte del pulpo se podría utilizar para almacenamiento, unión de piezas, retirada de piezas defectuosas..
Estas maquetas ya sean juntas o por separado tienen funciones diferente para poder utilizarlas.
4

Sistemas Secuenciales Programables / Proyecto final 1er año ARI
3. MATERIALES.
3.1. MEJORAS INCORPORADAS
La única maqueta que ha tenido mejoras físicas en su construcción ha sido la Tapadera Automática. Pasaremos a ver una por una las mejoras añadidas hasta ver el resultado final:
1. Incorporamos una pieza de aluminio galvanizado para que frenase la salida de la tapa y la dejase sobre la base perfectamente dispuesta para ser presionada por el cilindro de simple efecto. En principio lo intentamos con la regulación del aire que llegaba al cilindro de doble efecto que impulsa la tapa hasta la posición de la base, pero no fue posible. El resultado al añadir la pieza es muy óptimo ya que la pieza queda perfecta.
2. La siguiente mejora la pensamos para la práctica conjunta con las otras maquetas. La Cinta Transportadora nos mandaría las bases de plástico, pero nos dimos cuenta que no las dejaba como queríamos, así que decidimos poner una rampa que facilitase el paso de la pieza entre las dos maquetas. Esta vez también usamos aluminio galvanizado para fabricarla, ya que es el material que más a mano teníamos y nos sentíamos más a gusto por lo sencillo que es moldearlo.
3. Nuestra tercera idea surge con la fase en la que la pieza ya está tapada y se queda en el sitio. Pensamos que lo mejor sería sacar la pieza
5
Sistemas Secuenciales Programables / Proyecto final 1er año ARI
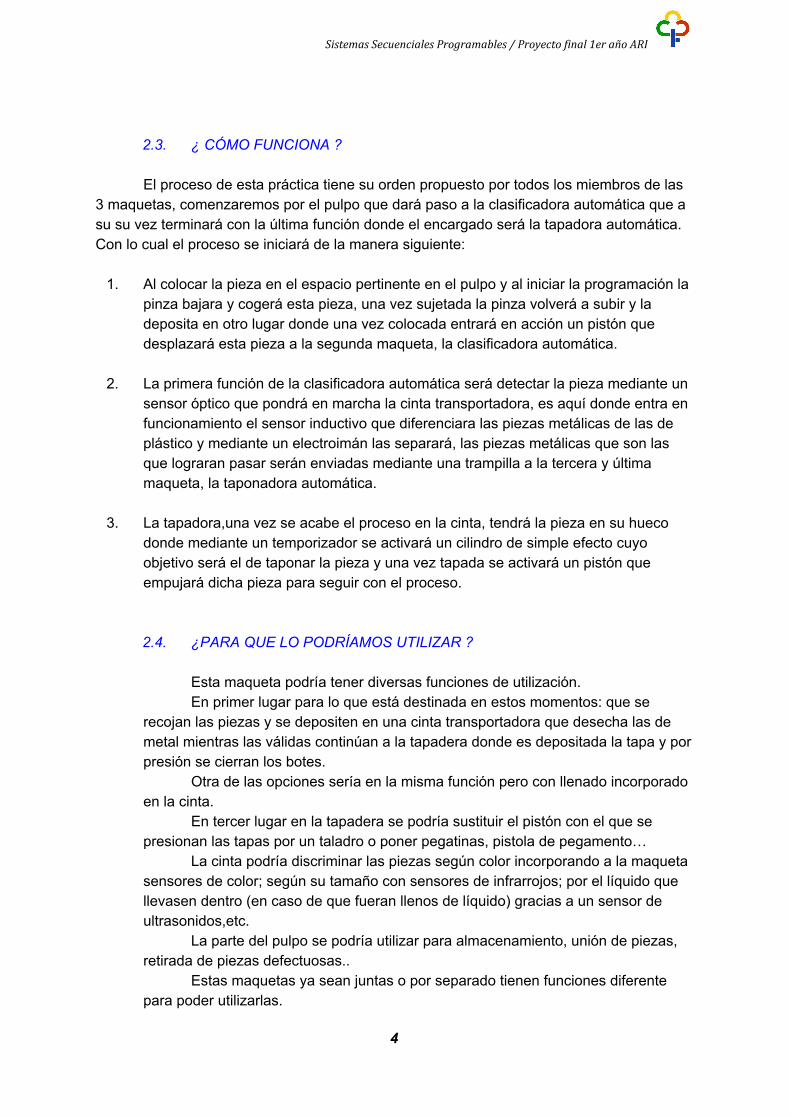
automáticamente ya que de forma manual sería peligroso sin para el proceso y si parábamos el proceso influiría en la producción por lo que lo más óptimo sería automatizar ese proceso. Tras pensar en un motor que sacase e introdujese las piezas a la posición de tapado con un aspa, comprobamos que era muy complicado por dos cosas:
Era difícil controlar sus movimientos de manera adecuada. Había que alimentar el motor externamente.
De esta forma surgió la idea de introducir un cilindro para expulsar la
pieza. Para ello sólo había que hacer un pequeño agujero con el taladro para que el émbolo tocase la pieza y la empuje hacia fuera; y añadir otra electroválvula para alimentar al cilindro. El resultado no pudo ser mejor, pues la expulsión de la pieza era limpia y sencilla.
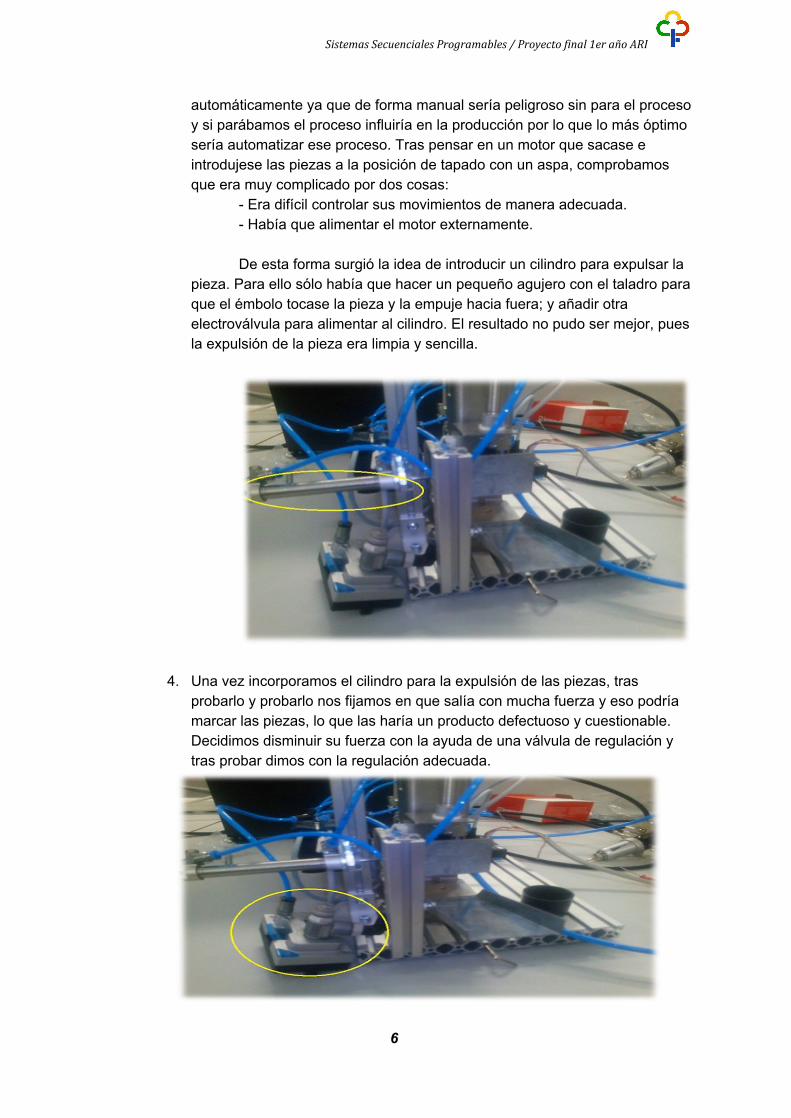
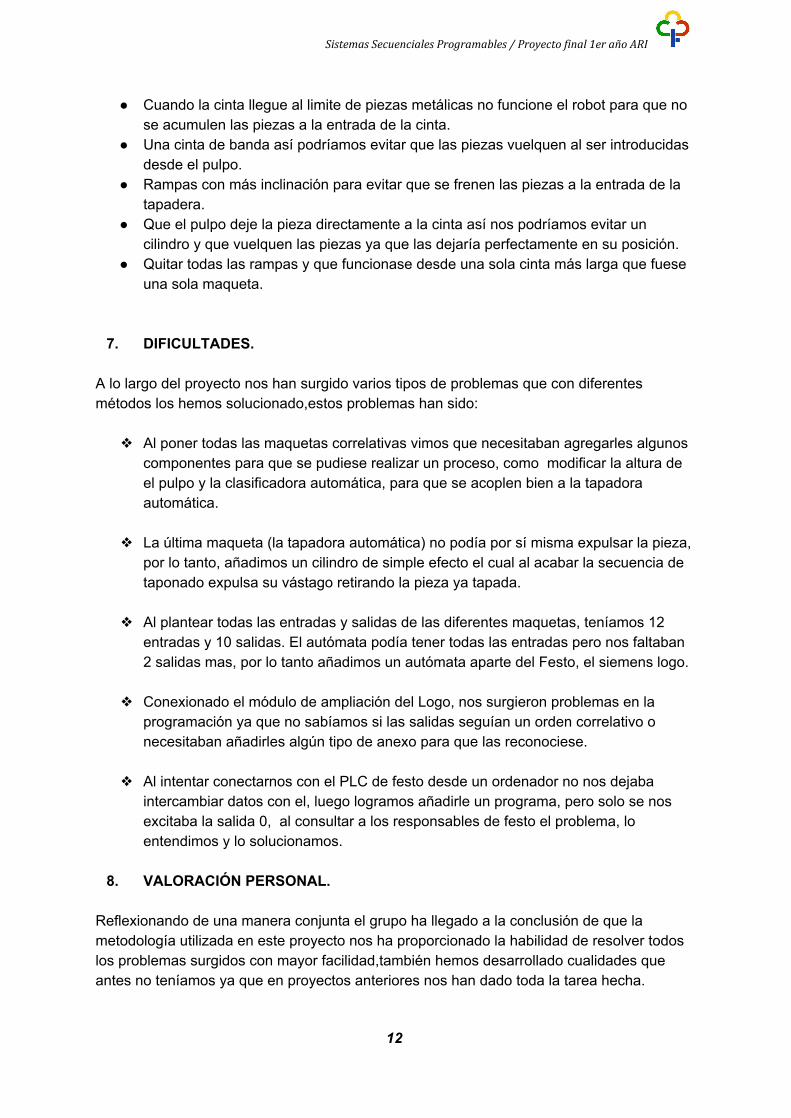
4. Una vez incorporamos el cilindro para la expulsión de las piezas, tras probarlo y probarlo nos fijamos en que salía con mucha fuerza y eso podría marcar las piezas, lo que las haría un producto defectuoso y cuestionable. Decidimos disminuir su fuerza con la ayuda de una válvula de regulación y tras probar dimos con la regulación adecuada.
6

Sistemas Secuenciales Programables / Proyecto final 1er año ARI
3.2. MATERIALES DE LAS ESTACIONES
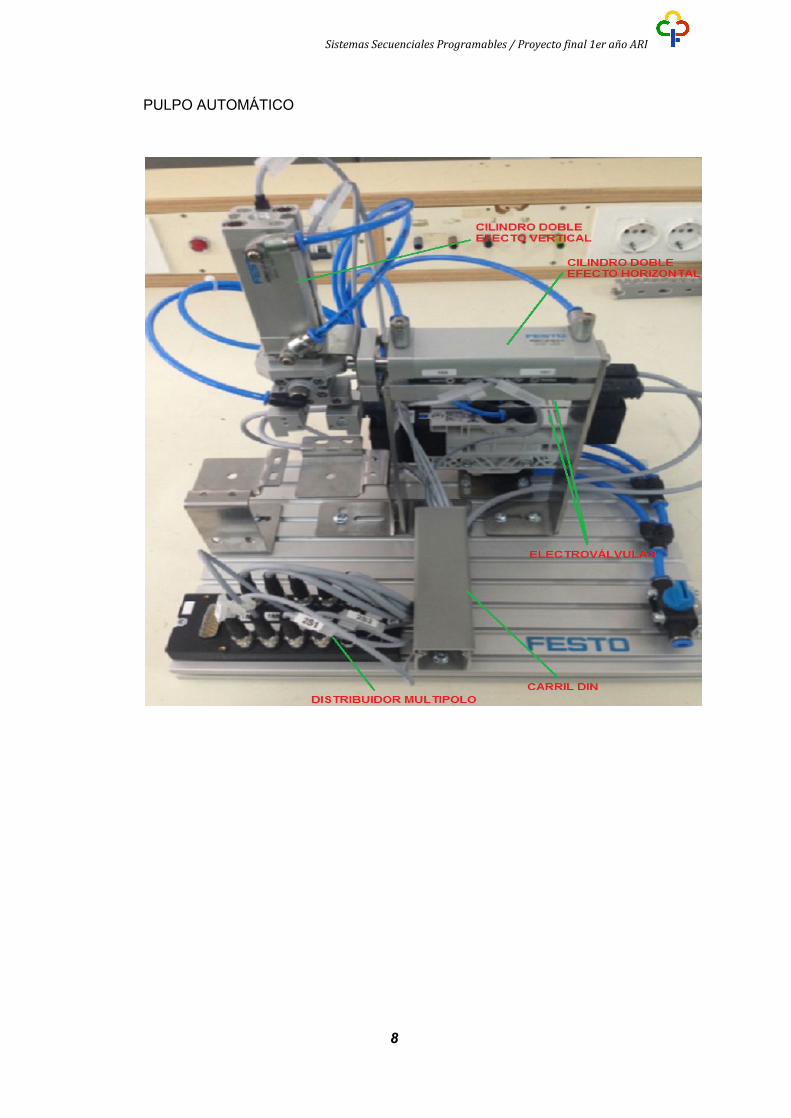
Vamos a mostrar una imágenes de cada una de las maquetas según su orden funcional en este proyecto. En las imágenes se aprecian los materiales que venían con la maqueta y los que hemos ido añadiendo como ya hemos explicado anteriormente. Sin embargo han habido algunos elementos que venían incluidos que no hemos usado y hemos descartado porque no nos han hecho falta, y por tanto no se ven incluidos en las imágenes que mostramos a continuación. Pretendemos mostrar simplemente todo lo que hemos usado y las mejoras ya que es el material funcional del proyecto.
7
Sistemas Secuenciales Programables / Proyecto final 1er año ARI
PULPO AUTOMÁTICO
8
Sistemas Secuenciales Programables / Proyecto final 1er año ARI
CINTA AUTOMÁTICA
9
Sistemas Secuenciales Programables / Proyecto final 1er año ARI
TAPADERA AUTOMÁTICA
10
Sistemas Secuenciales Programables / Proyecto final 1er año ARI
4. ESQUEMAS. 4.1. GRAFCETS Primero se encontrarán los enlaces de las 3 maquetas, y el último enlace hace referencia al grafcet general: El pulpo automático La clasificadora automática La tapadora automática Grafcet General 4.2. SEE ELECTRICAL See Electrical Práctica Conjunta
5. EJECUCIÓN
5.1. TUTORIAL LOGO https://www.youtube.com/watch?v=8fmFGroLn6c
5.2. TUTORIAL CODESYS https://www.youtube.com/watch?v=11fvcs2Zj8g 5.3. TUTORIAL MCLAB https://www.youtube.com/watch?v=T4njq2YdWc 5.4. VIDEO PROYECTO FINAL https://www.youtube.com/watch?v=DddzPx8fGP4
6. PROPUESTAS DE MEJORA.
Alimentación automática al pulpo. A la tapadera automática una caja para que las piezas no caigan al suelo, o una
rampa con un final de carrera y que cuente las piezas ya cerradas cuando llegue al limite de piezas que no deje introducir ninguna más.
11
Sistemas Secuenciales Programables / Proyecto final 1er año ARI
Cuando la cinta llegue al limite de piezas metálicas no funcione el robot para que no se acumulen las piezas a la entrada de la cinta.
Una cinta de banda así podríamos evitar que las piezas vuelquen al ser introducidas desde el pulpo.
Rampas con más inclinación para evitar que se frenen las piezas a la entrada de la tapadera.
Que el pulpo deje la pieza directamente a la cinta así nos podríamos evitar un cilindro y que vuelquen las piezas ya que las dejaría perfectamente en su posición.
Quitar todas las rampas y que funcionase desde una sola cinta más larga que fuese una sola maqueta.
7. DIFICULTADES.
A lo largo del proyecto nos han surgido varios tipos de problemas que con diferentes métodos los hemos solucionado,estos problemas han sido:
Al poner todas las maquetas correlativas vimos que necesitaban agregarles algunos componentes para que se pudiese realizar un proceso, como modificar la altura de el pulpo y la clasificadora automática, para que se acoplen bien a la tapadora automática.
La última maqueta (la tapadora automática) no podía por sí misma expulsar la pieza,
por lo tanto, añadimos un cilindro de simple efecto el cual al acabar la secuencia de taponado expulsa su vástago retirando la pieza ya tapada.
Al plantear todas las entradas y salidas de las diferentes maquetas, teníamos 12
entradas y 10 salidas. El autómata podía tener todas las entradas pero nos faltaban 2 salidas mas, por lo tanto añadimos un autómata aparte del Festo, el siemens logo.
Conexionado el módulo de ampliación del Logo, nos surgieron problemas en la
programación ya que no sabíamos si las salidas seguían un orden correlativo o necesitaban añadirles algún tipo de anexo para que las reconociese.
Al intentar conectarnos con el PLC de festo desde un ordenador no nos dejaba
intercambiar datos con el, luego logramos añadirle un programa, pero solo se nos excitaba la salida 0, al consultar a los responsables de festo el problema, lo entendimos y lo solucionamos.
8. VALORACIÓN PERSONAL.
Reflexionando de una manera conjunta el grupo ha llegado a la conclusión de que la metodología utilizada en este proyecto nos ha proporcionado la habilidad de resolver todos los problemas surgidos con mayor facilidad,también hemos desarrollado cualidades que antes no teníamos ya que en proyectos anteriores nos han dado toda la tarea hecha.
12
Sistemas Secuenciales Programables / Proyecto final 1er año ARI
En un principio el grupo se encontraba desorientado y nos supone mucho esfuerzo y dedicación el llegar a entender y a compilar las ideas surgidas por todos los miembros. Al proyecto se le han invertido muchas horas, pero el resultado final ha valido la pena ya que contemplar el trabajo realizado nos ha resultado muy satisfactorio. Todo este trabajo nos ha preparado para en un futuro saber hacer un proyecto de más dimensiones teniendo una base profesional mejorada. Nos hemos preguntado todos que hemos aprendido y las respuestas han sido las siguientes: ¿Qué has aprendido en el proyecto de final de curso? Sergio Muñoz Toro: “Documentar de forma correcta y ordenada”. Jonathan Domenech :”He aprendido a aprender”. Jorge Sanjuán: ”Mejor dominio en la realización de esquemas en SeeElectrical”. Alejandro Carmona: ”Realizar esquemas electroneumáticos y Grafcets”. Nicolas Bañón: ”Trabajar en grupo y documentar una buena memoria”. Jose Rios:”He aprendido a organizarme en grupo“. Juan Perelló:”He mejorado siendo más autosuficiente”. Patricia Villa:”Primero pensar y después actuar“. Maria Rueda:”Diferentes conocimientos de electricidad“. Ximo Sanz:”Descubriendo el maravilloso mundo de Codesys“. Carlos Llacer:”Comunicación entre equipos“. Rafa Vilaplana:”Los milagros no existen, solo el trabajo duro“.
Volver
13

Sistemas Secuenciales Programables / Proyecto final 1er año ARI
14