Redes de Comunicación Industrial - Intro
20
Comunicaciones Industriales Introducción a las Redes de Comunicaciones Industriales TEMA – Introducción a las Comunicaciones Industriales 1. – Introducción 2. – Visión Histórica 3. – Las Comunicaciones en los Entornos de Fabricación 4. – Tecnologías de la Información en el Control de Procesos 5. – Arquitecturas de Fabricantes Índice
-
Upload
jorge-luis-chahuasoncco-papel -
Category
Documents
-
view
33 -
download
0
Transcript of Redes de Comunicación Industrial - Intro
Comunicaciones Industriales
Introducción a las Redes de Comunicaciones Industriales
TEMA – Introducción a las Comunicaciones Industriales
1. – Introducción
2. – Visión Histórica
3. – Las Comunicaciones en los Entornos de Fabricación
4. – Tecnologías de la Información en el Control de Procesos
5. – Arquitecturas de Fabricantes
Índice
Introducción
Los Sistemas de Comunicación proporcionan el esqueletosobre el se articulan las estrategias de automatizaciónLos sistemas de comunicación industrial son mecanismos de intercambio de datos distribuidos en una organización industrial
Intercambio de datos on-line y, en los niveles inferiores de la pirámide (sensores, actuadores, máquinas, células de fabricación, etc.), se exige el requisito de tiempo real.
Intercambio de datos eficiente y de bajo coste temporal y económico
Los procesos de tiempo real requieren una acotación determinista máxima de sus tiempos de ejecución
Objetivos
El objetivo primario del sistema de comunicación es el de proporcionar el intercambio de información (de control) entre dispositivos remotosEste intercambio de información puede realizarse en base a distintas tecnologías:
Comunicación punto a punto analógica
Comunicación punto a punto digital
Comunicación punto punto híbrida
Comunicación digital con bus de campo
Las tecnologías avanzadas admiten obtener prestaciones adicionales
Requerimientos de los Usuarios de Redes IndustrialesReducción de la programación
Evitar el manejo de datos por el PLC en funciones de control
Evitar la programación de nodos existentes al añadir nuevos nodos
Aumentar las prestaciones del sistemaDeterminismo
Efectividad del ancho de banda
Reducción del cableadoControl, programación y diagnosis sobre la misma red
Soluciones escalablesElección del controlador adecuado para el control, no para el manejo de datos
Añadir o eliminar dispositivos sin influir en otros dispositivos del sistema
Reducción de los tiempos de paroDiagnóstico de los dispositivos
Información predictiva
Eficiencia en las Redes de AutomatizaciónHoy día las redes operan más rápidamente que en el pasadoLa pura velocidad no es el problema, lo es la eficienciaCuanta más eficiente es la red manejando datos, mayor es el throughput y la productividadEjemplo: aumentar el límite de velocidad en una autopista deentrada a una ciudad no implica llegar más rápido en horas punta.
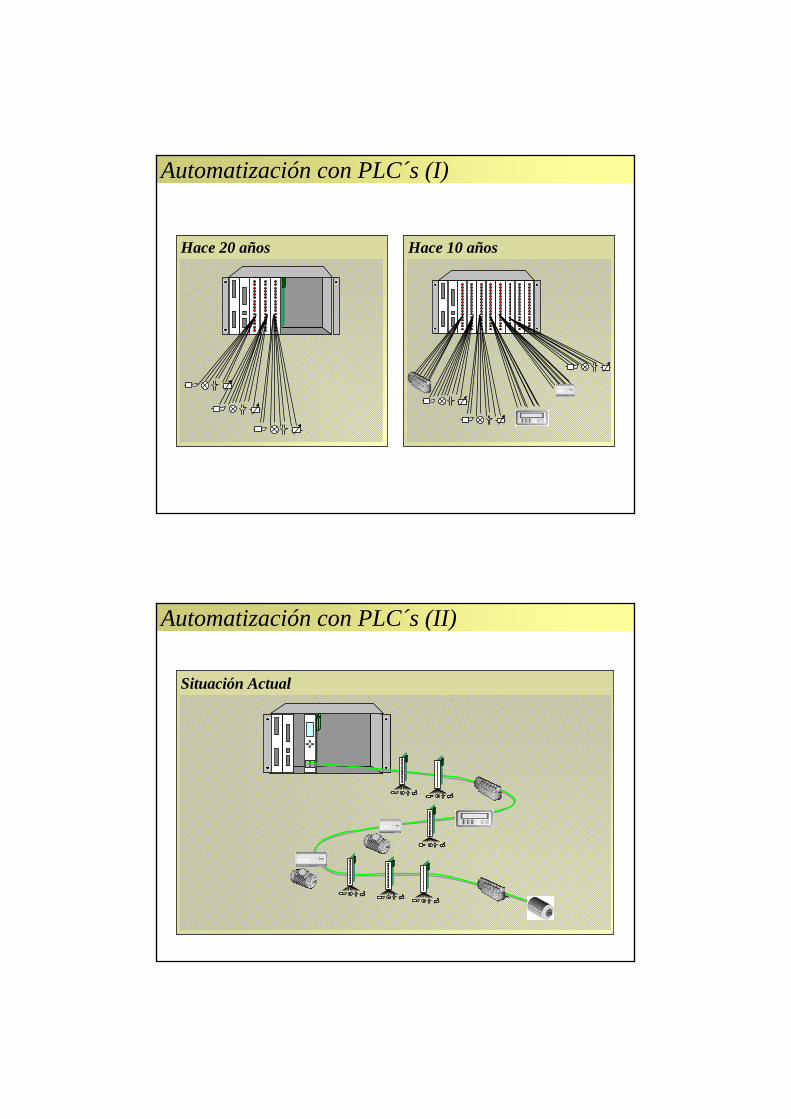
Automatización con PLC´s (I)
Hace 20 años Hace 10 años
Automatización con PLC´s (II)
Situación Actual
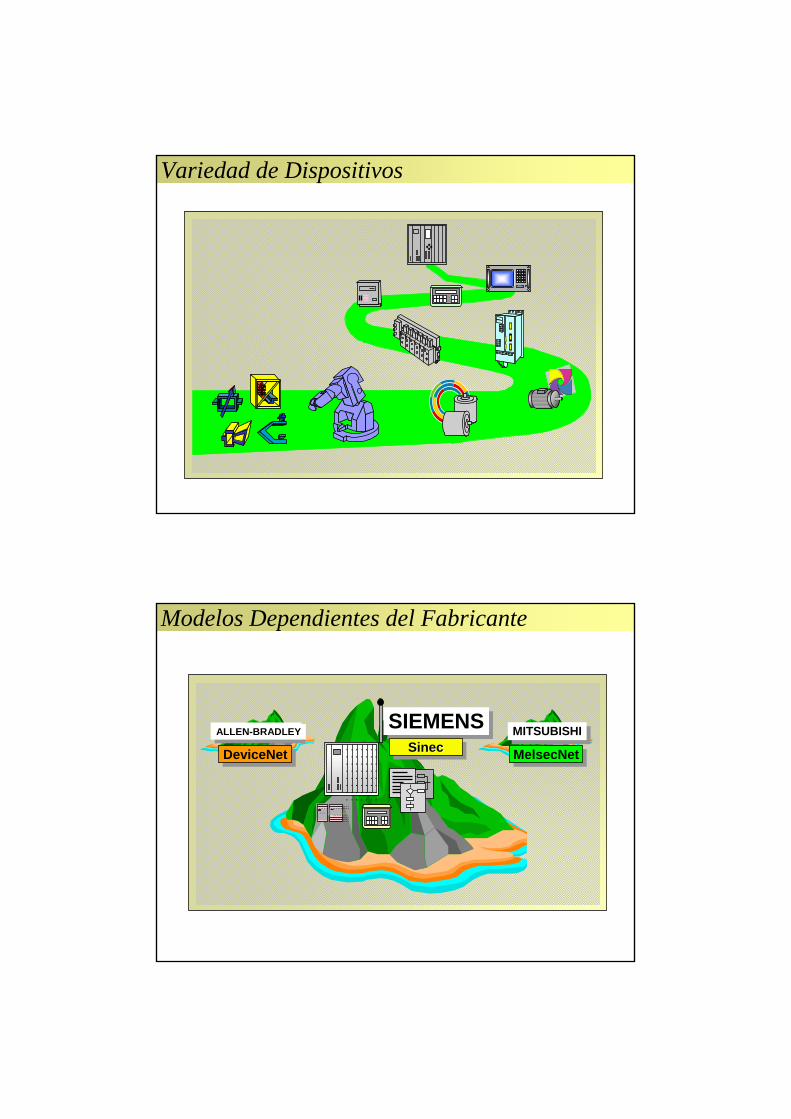
Variedad de Dispositivos
MITSUBISHIMITSUBISHISIEMENSSIEMENSALLEN-BRADLEY........
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
... ........................................
...................................................
DeviceNetDeviceNet SinecSinecSinecMelsecNetMelsecNet
Modelos Dependientes del Fabricante
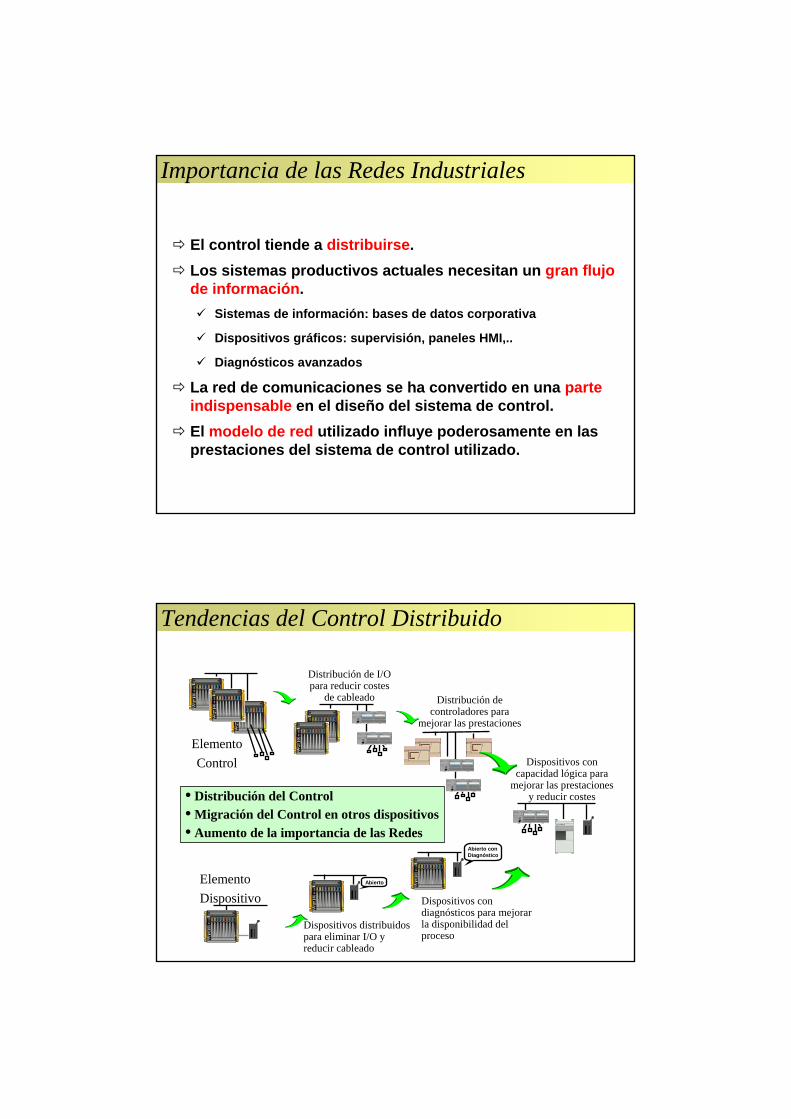
Importancia de las Redes Industriales
El control tiende a distribuirse.Los sistemas productivos actuales necesitan un gran flujo de información.
Sistemas de información: bases de datos corporativa
Dispositivos gráficos: supervisión, paneles HMI,..
Diagnósticos avanzados
La red de comunicaciones se ha convertido en una parte indispensable en el diseño del sistema de control.El modelo de red utilizado influye poderosamente en las prestaciones del sistema de control utilizado.
Distribución de controladores para
mejorar las prestaciones
Distribución de I/O para reducir costes
de cableado
ElementoControl
ElementoDispositivo
Abierto
Dispositivos distribuidospara eliminar I/O y reducir cableado
Abierto conDiagnóstico
Dispositivos con diagnósticos para mejorarla disponibilidad del proceso
Dispositivos con capacidad lógica para
mejorar las prestacionesy reducir costes• Distribución del Control
• Migración del Control en otros dispositivos• Aumento de la importancia de las Redes
Tendencias del Control Distribuido
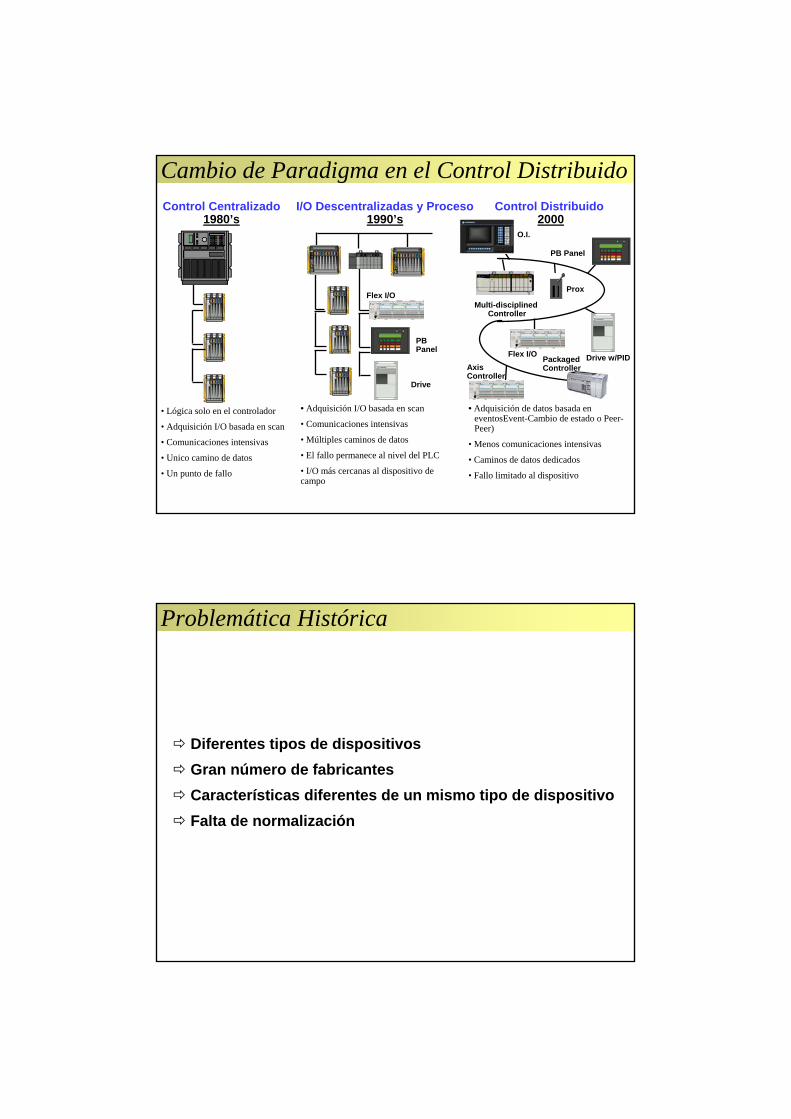
Cambio de Paradigma en el Control Distribuido
• Adquisición I/O basada en scan
• Comunicaciones intensivas
• Múltiples caminos de datos
• El fallo permanece al nivel del PLC
• I/O más cercanas al dispositivo de campo
I/O Descentralizadas y Proceso1990’s
Flex I/O
Drive
PBPanel
• Adquisición de datos basada en eventosEvent-Cambio de estado o Peer-Peer)
• Menos comunicaciones intensivas
• Caminos de datos dedicados
• Fallo limitado al dispositivo
Control Distribuido2000
Multi-disciplinedController
Drive w/PIDAxis Controller
PB Panel
Prox
Flex I/O
O.I.
PackagedController
• Lógica solo en el controlador
• Adquisición I/O basada en scan
• Comunicaciones intensivas
• Unico camino de datos
• Un punto de fallo
Control Centralizado1980’s
Problemática Histórica
Diferentes tipos de dispositivosGran número de fabricantesCaracterísticas diferentes de un mismo tipo de dispositivoFalta de normalización
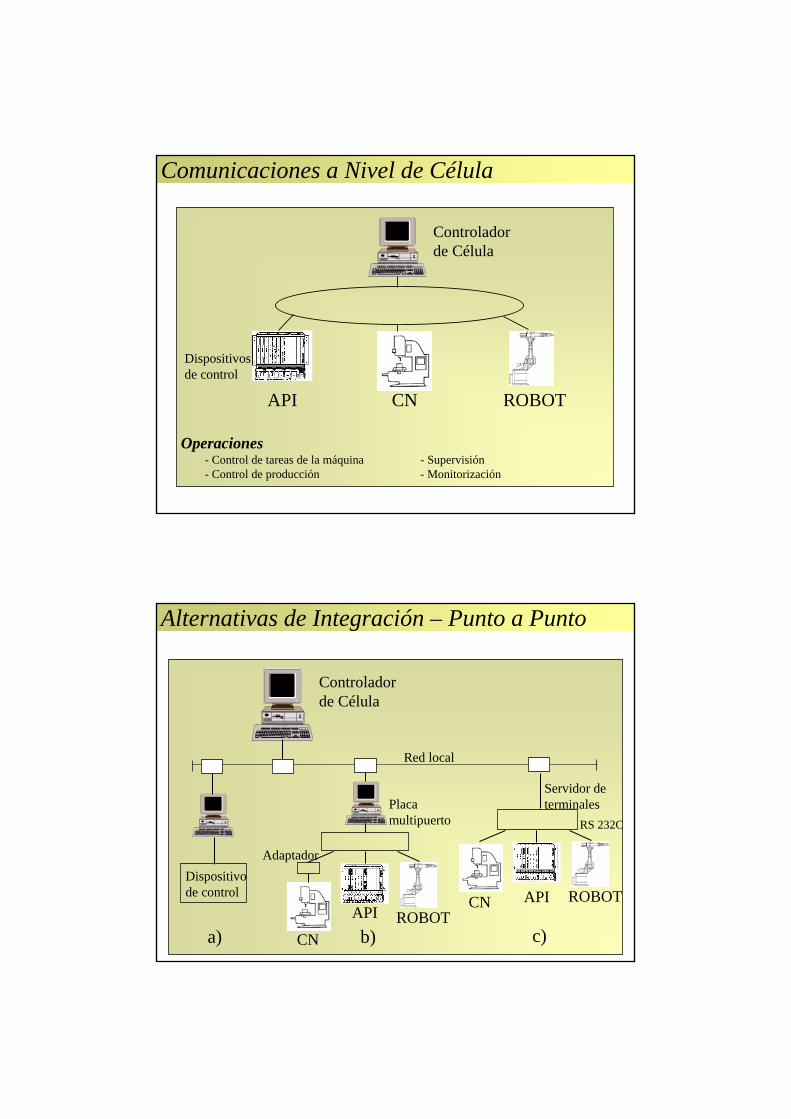
Controlador de Célula
Dispositivosde control
API CN ROBOT
Operaciones- Control de tareas de la máquina - Supervisión- Control de producción - Monitorización
Comunicaciones a Nivel de Célula
Controlador de Célula
Dispositivode control
API
CNROBOT
a) b)
Adaptador
Placa multipuerto
APICN ROBOT
c)
Servidor de terminales
RS 232C
Red local
Alternativas de Integración – Punto a Punto
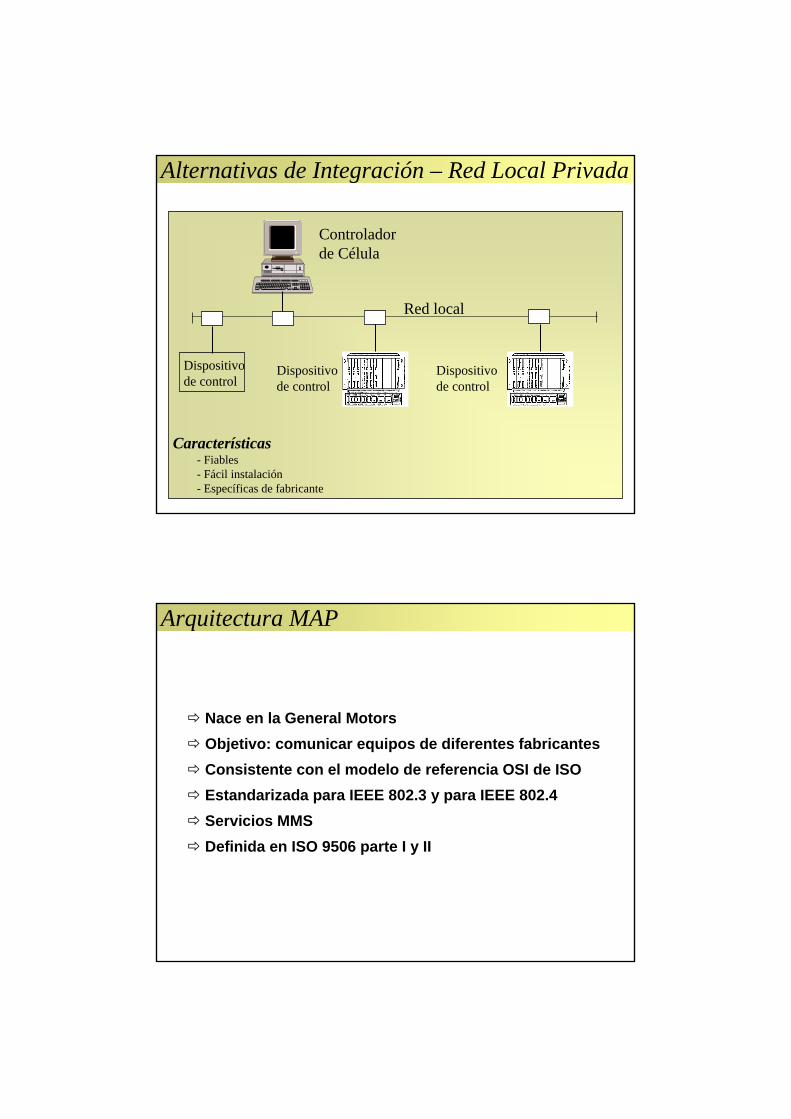
Controlador de Célula
Dispositivode control
Red local
Dispositivode control
Dispositivode control
Características- Fiables- Fácil instalación- Específicas de fabricante
Alternativas de Integración – Red Local Privada
Arquitectura MAP
Nace en la General MotorsObjetivo: comunicar equipos de diferentes fabricantesConsistente con el modelo de referencia OSI de ISOEstandarizada para IEEE 802.3 y para IEEE 802.4Servicios MMSDefinida en ISO 9506 parte I y II
Alternativas de Integración Industrial
Buses de actuadores – sensores:Se han presentado múltiples iniciativas
Interbus-S de Phoenix ContactAS-i (Actuador-Sensor Interface)DeviceNet (Controller Area Network CAN)
Buses de campo:Se han presentado múltiples iniciativas
Bitbus de IntelFIP de origen francésPROFIBUS de origen alemánControlNet (Controller Area Network CAN)
.
.
.
Mae
stro
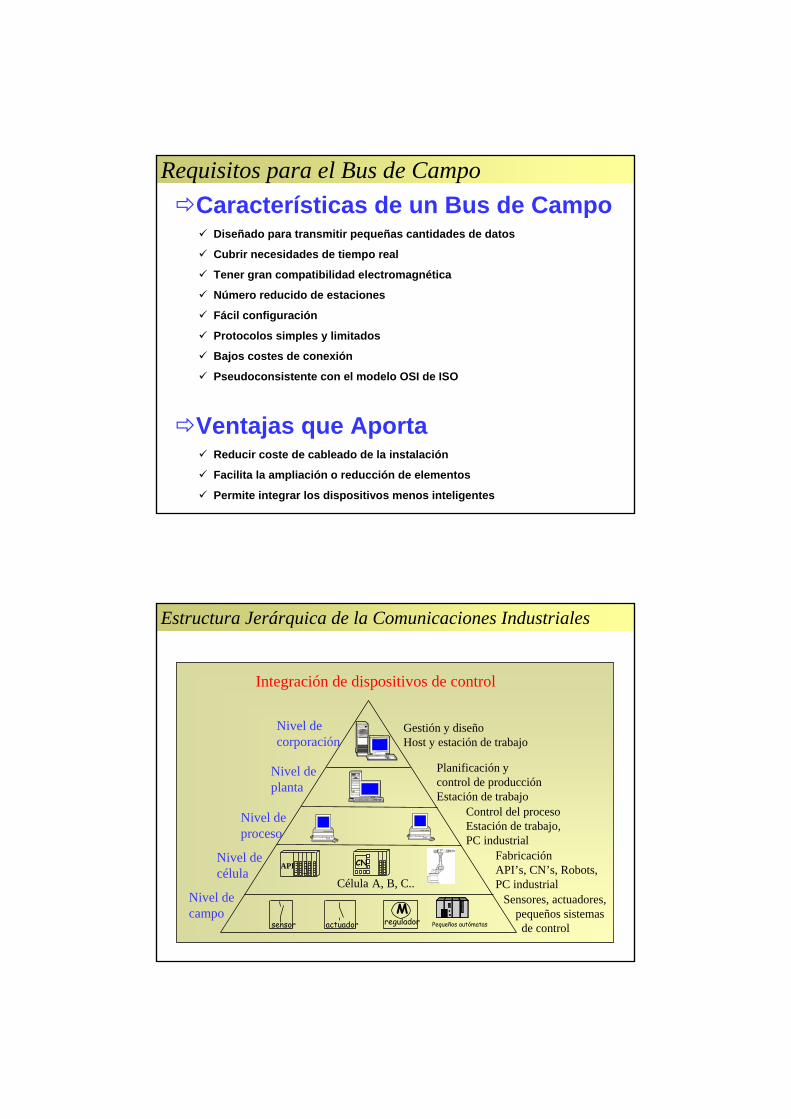
• Tiempo de ciclo breve y constante
• Alta fiabilidad de la transmisión con datos de
pequeño tamaño y alta eficacia del protocolo
• Transmisión simultanea de datos de E/S y
mensajes sin influencia mutua
• Manejo sencillo
Requisitos para el Bus de Sensores/Actuadores
Requisitos para el Bus de CampoCaracterísticas de un Bus de Campo
Diseñado para transmitir pequeñas cantidades de datos
Cubrir necesidades de tiempo real
Tener gran compatibilidad electromagnética
Número reducido de estaciones
Fácil configuración
Protocolos simples y limitados
Bajos costes de conexión
Pseudoconsistente con el modelo OSI de ISO
Ventajas que AportaReducir coste de cableado de la instalación
Facilita la ampliación o reducción de elementos
Permite integrar los dispositivos menos inteligentes
Integración de dispositivos de control
Nivel decorporación
Nivel de planta
Nivel de proceso
Nivel decélula
Nivel decampo
Gestión y diseñoHost y estación de trabajo
Planificación ycontrol de producciónEstación de trabajo
Control del procesoEstación de trabajo,PC industrial
FabricaciónAPI’s, CN’s, Robots,PC industrial
Sensores, actuadores,pequeños sistemasde control
Célula A, B, C..
sensor actuador reguladorM
Pequeños autómatas
API CN
Estructura Jerárquica de la Comunicaciones Industriales
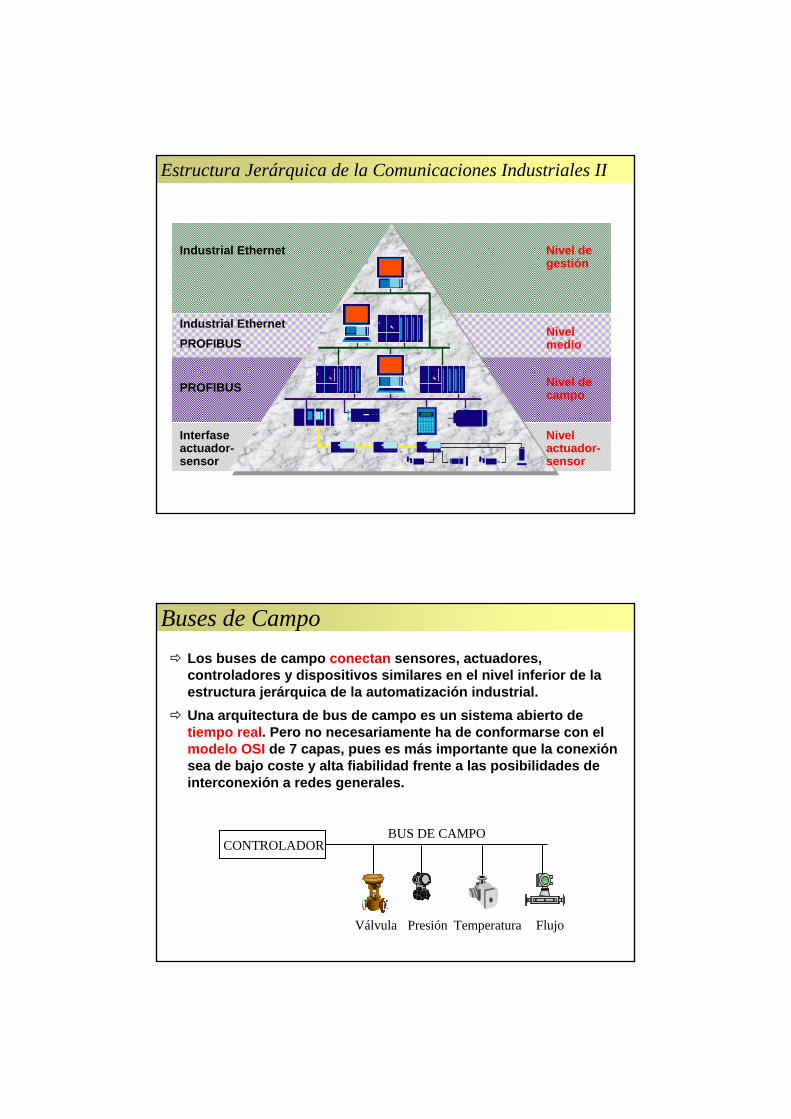
Estructura Jerárquica de la Comunicaciones Industriales II
Nivel medioPROFIBUS
Industrial Ethernet
Nivel actuador-sensor
Interfase actuador-sensor
PROFIBUS Nivel de campo
Industrial Ethernet Nivel de gestión
Válvula
BUS DE CAMPO
Presión Temperatura Flujo
CONTROLADOR
Buses de CampoLos buses de campo conectan sensores, actuadores, controladores y dispositivos similares en el nivel inferior de la estructura jerárquica de la automatización industrial.Una arquitectura de bus de campo es un sistema abierto de tiempo real. Pero no necesariamente ha de conformarse con el modelo OSI de 7 capas, pues es más importante que la conexión sea de bajo coste y alta fiabilidad frente a las posibilidades de interconexión a redes generales.
mensaje 1 mensaje 2 mensaje 3
Transmisor Actuador
Controlador
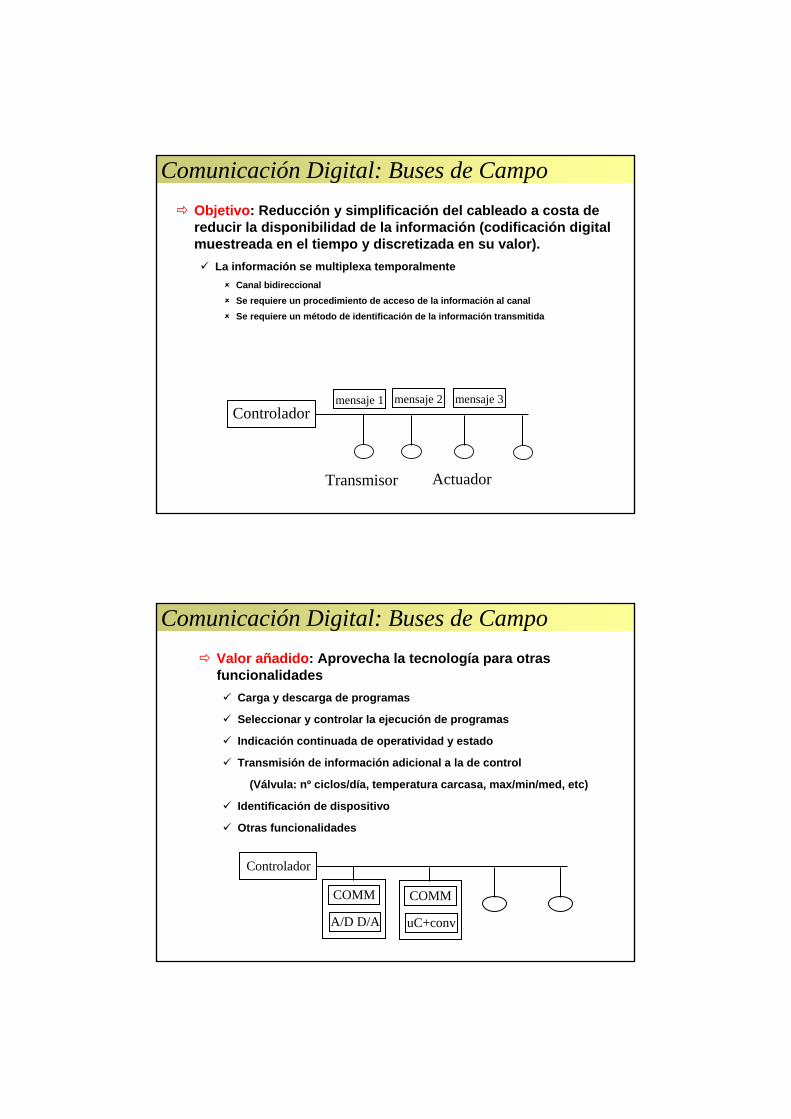
Comunicación Digital: Buses de CampoObjetivo: Reducción y simplificación del cableado a costa de reducir la disponibilidad de la información (codificación digital muestreada en el tiempo y discretizada en su valor).
La información se multiplexa temporalmenteCanal bidireccionalSe requiere un procedimiento de acceso de la información al canal Se requiere un método de identificación de la información transmitida
COMM
A/D D/A
Controlador
COMM
uC+conv
Comunicación Digital: Buses de CampoValor añadido: Aprovecha la tecnología para otras funcionalidades
Carga y descarga de programas
Seleccionar y controlar la ejecución de programas
Indicación continuada de operatividad y estado
Transmisión de información adicional a la de control
(Válvula: nº ciclos/día, temperatura carcasa, max/min/med, etc)
Identificación de dispositivo
Otras funcionalidades
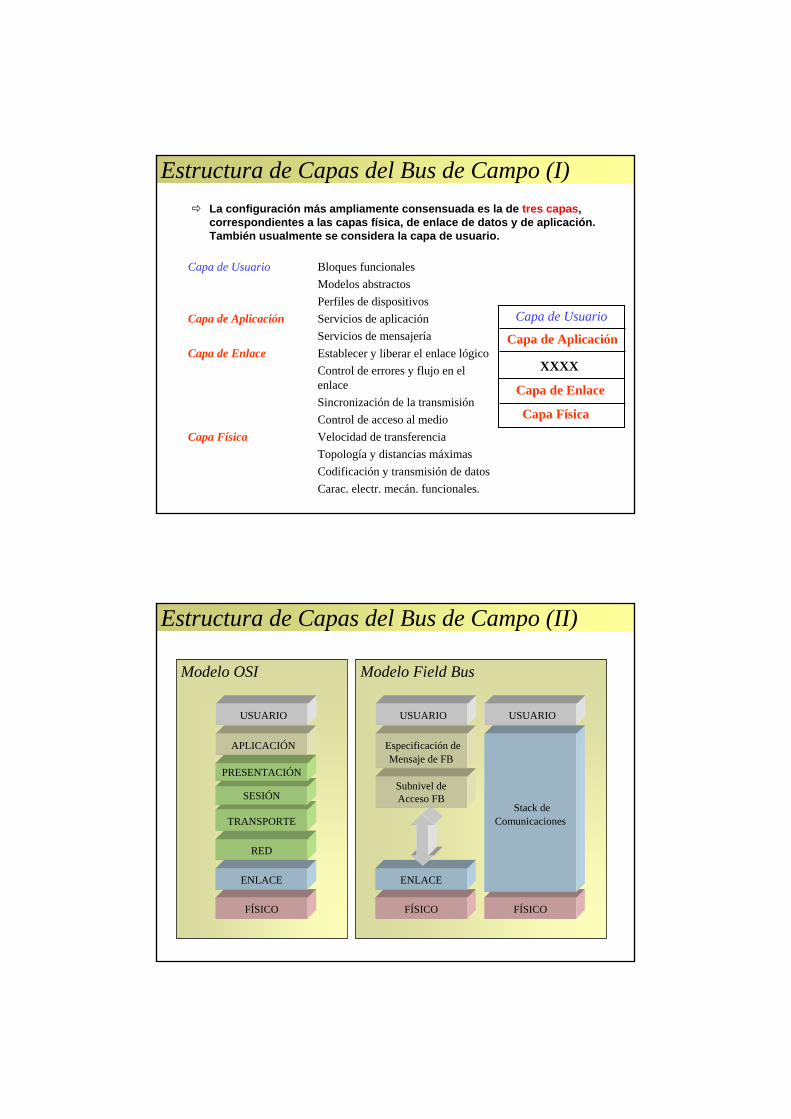
Capa de Usuario Bloques funcionalesModelos abstractosPerfiles de dispositivos
Capa de Aplicación Servicios de aplicaciónServicios de mensajería
Capa de Enlace Establecer y liberar el enlace lógicoControl de errores y flujo en el enlaceSincronización de la transmisiónControl de acceso al medio
Capa Física Velocidad de transferenciaTopología y distancias máximasCodificación y transmisión de datosCarac. electr. mecán. funcionales.
Capa de Aplicación
Capa de Usuario
Capa de Enlace
XXXX
Capa Física
Estructura de Capas del Bus de Campo (I)La configuración más ampliamente consensuada es la de tres capas, correspondientes a las capas física, de enlace de datos y de aplicación. También usualmente se considera la capa de usuario.
Estructura de Capas del Bus de Campo (II)
FÍSICO
ENLACE
RED
TRANSPORTE
FÍSICO
ENLACE
FÍSICO
Stack de Comunicaciones
USUARIO
Subnivel de Acceso FB
Especificación de Mensaje de FB
USUARIO
Modelo OSI Modelo Field Bus
SESIÓN
PRESENTACIÓN
APLICACIÓN
USUARIO
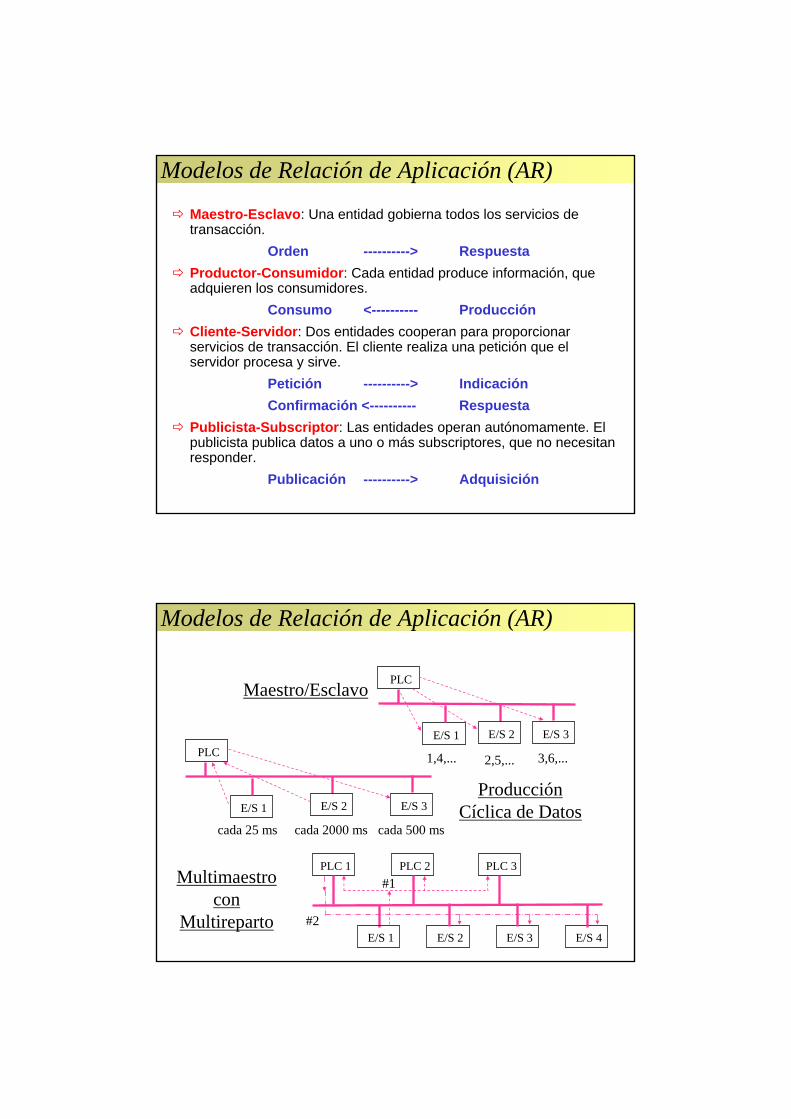
Modelos de Relación de Aplicación (AR)
Maestro-Esclavo: Una entidad gobierna todos los servicios de transacción.
Orden ----------> RespuestaProductor-Consumidor: Cada entidad produce información, que adquieren los consumidores.
Consumo <---------- ProducciónCliente-Servidor: Dos entidades cooperan para proporcionar servicios de transacción. El cliente realiza una petición que el servidor procesa y sirve.
Petición ----------> IndicaciónConfirmación <---------- Respuesta
Publicista-Subscriptor: Las entidades operan autónomamente. El publicista publica datos a uno o más subscriptores, que no necesitan responder.
Publicación ----------> Adquisición
1,4,...
Maestro/Esclavo
E/S 1 E/S 2 E/S 3
2,5,... 3,6,...
PLC
cada 25 ms
E/S 1 E/S 2 E/S 3
cada 2000 ms cada 500 ms
PLC
ProducciónCíclica de Datos
Multimaestrocon
MultirepartoE/S 1 E/S 2 E/S 3
PLC 1
E/S 4
PLC 2 PLC 3#1
#2
Modelos de Relación de Aplicación (AR)
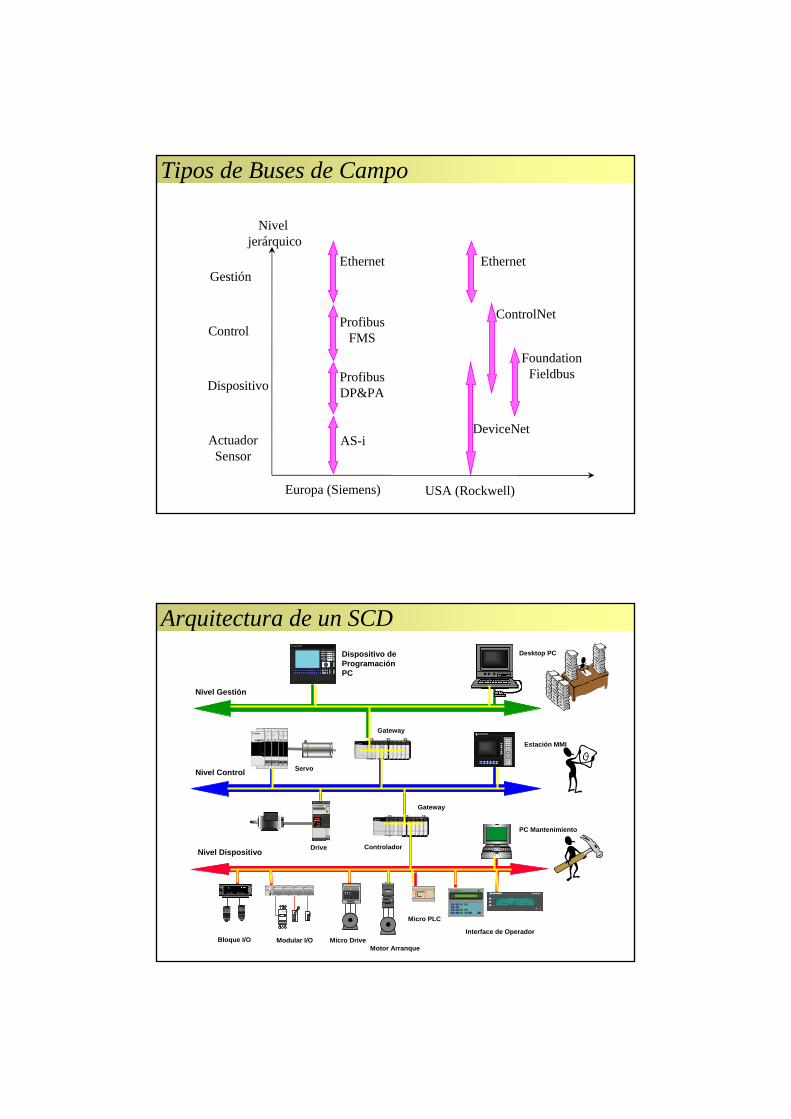
ActuadorSensor
Dispositivo
Control
GestiónEthernet Ethernet
ProfibusFMS
ProfibusDP&PA
AS-i
Europa (Siemens) USA (Rockwell)
ControlNet
DeviceNet
FoundationFieldbus
Nivel jerárquico
Tipos de Buses de Campo
Nivel Dispositivo
Estación MMI
24vdc
509 -BOD
Modular I/OBloque I/O Micro Drive
Nivel Control
Gateway
Dispositivo de Programación PC
Motor Arranque
Micro PLC
Interface de Operador
Drive
Servo
Gateway
PC Mantenimiento
Desktop PC
Controlador
Arquitectura de un SCD
Nivel Gestión
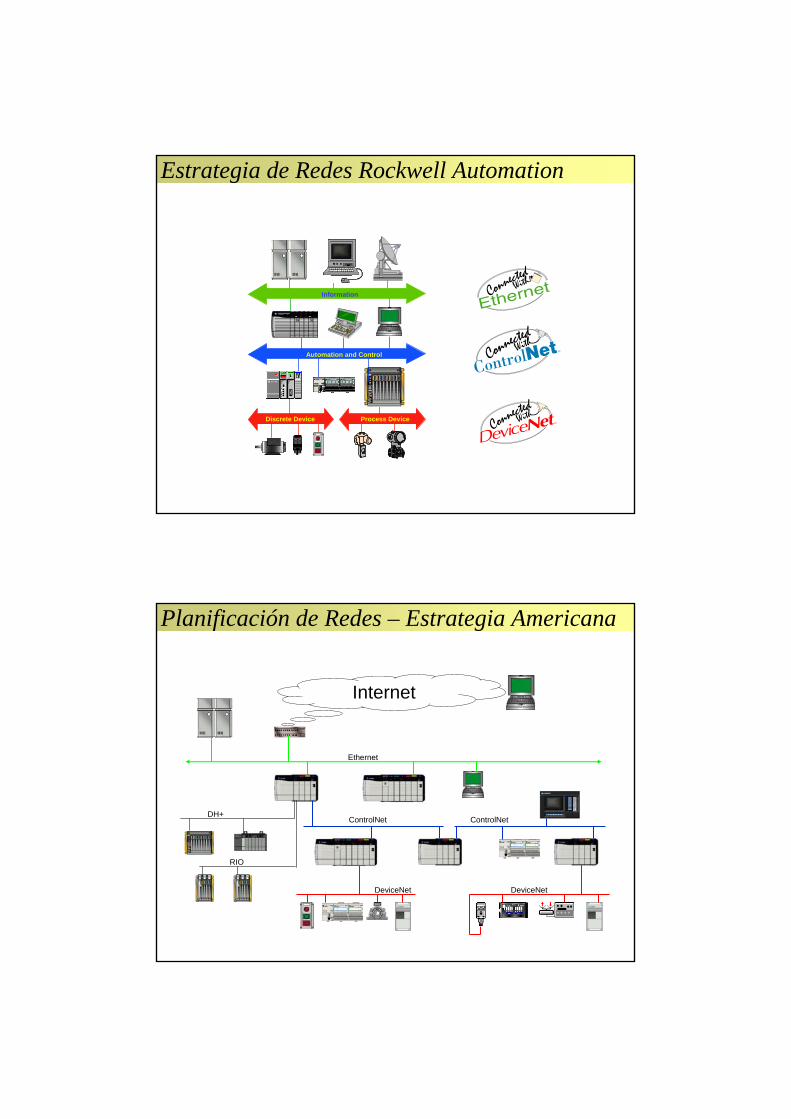
Information
Discrete Device
Automation and Control
Process Device
Estrategia de Redes Rockwell Automation
Internet
Ethernet
ControlNet ControlNet
DeviceNet DeviceNet
RIO
DH+
Planificación de Redes – Estrategia Americana
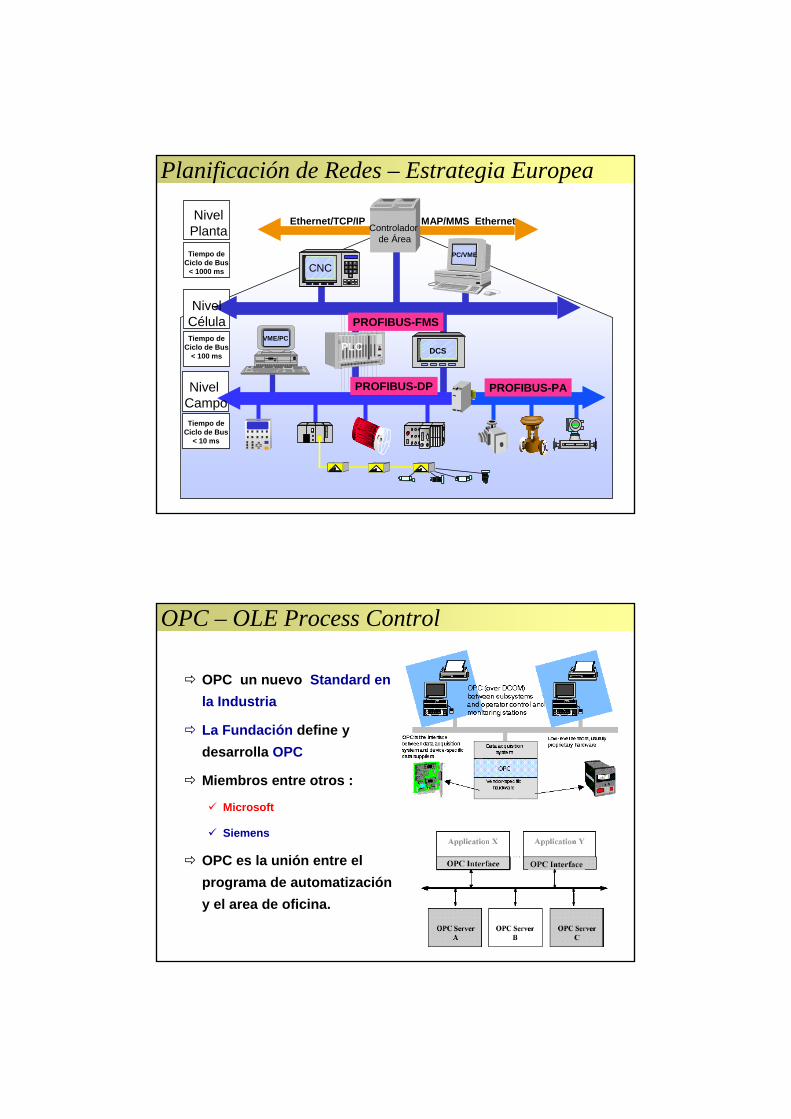
Planificación de Redes – Estrategia Europea
CNCPC/VME
VME/PCPLC DCS
Controladorde Área
Ethernet/TCP/IP MAP/MMS Ethernet
PROFIBUS-FMS
PROFIBUS-DP PROFIBUS-PA
NivelPlantaTiempo de
Ciclo de Bus< 1000 ms
NivelCélulaTiempo de
Ciclo de Bus< 100 ms
Nivel CampoTiempo de
Ciclo de Bus< 10 ms
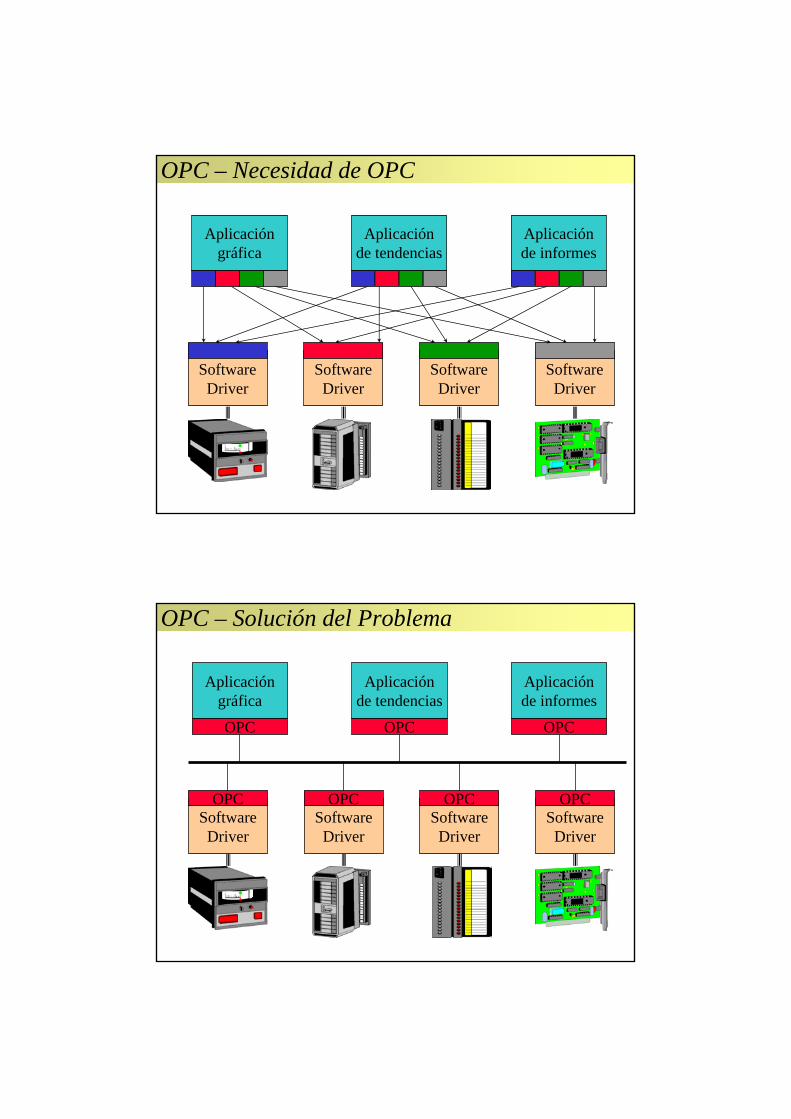
OPC un nuevo Standard en la Industria
La Fundación define y desarrolla OPC
Miembros entre otros :
Microsoft
Siemens
OPC es la unión entre el programa de automatizacióny el area de oficina.
OPC – OLE Process Control
OPC – Necesidad de OPC
SoftwareDriver
SoftwareDriver
SoftwareDriver
SoftwareDriver
Aplicacióngráfica
Aplicaciónde tendencias
Aplicaciónde informes
OPC – Solución del Problema
SoftwareDriver
SoftwareDriver
SoftwareDriver
SoftwareDriver
OPC OPC OPC OPC
Aplicacióngráfica
Aplicaciónde tendencias
Aplicaciónde informes
OPC OPC OPC
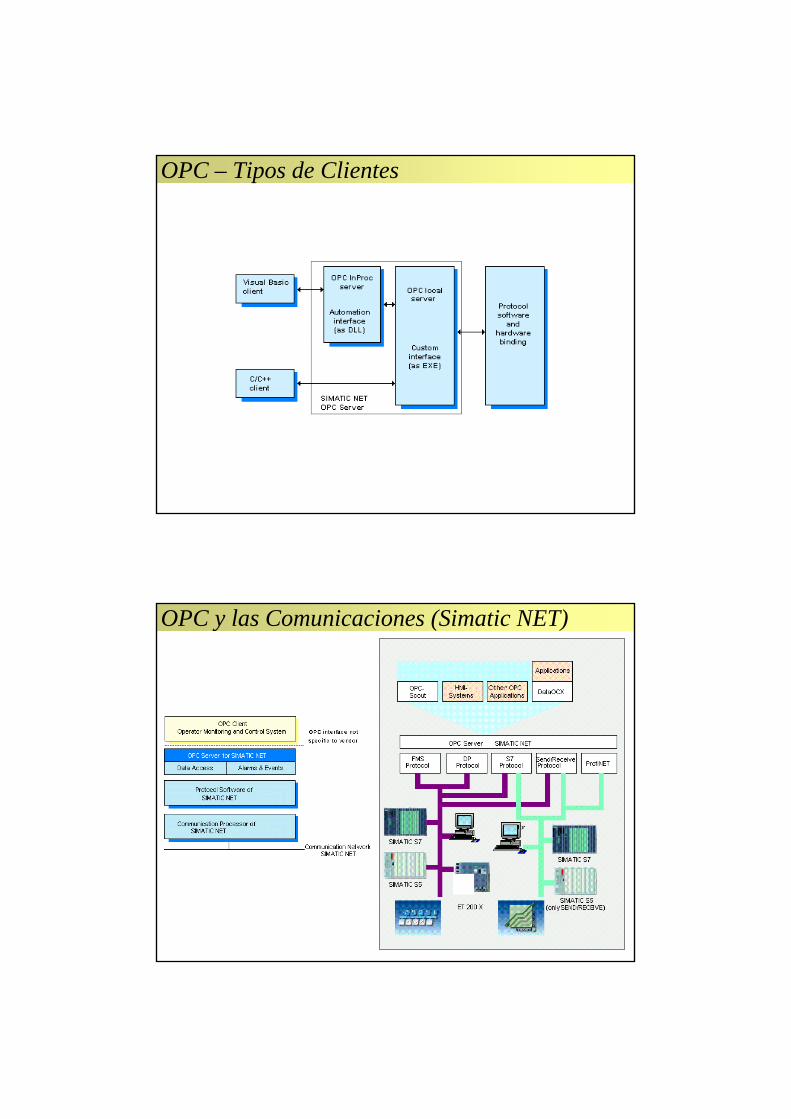
OPC – Tipos de Clientes
OPC y las Comunicaciones (Simatic NET)