Reserva de derechos de autor: 04-2019-1030-16243300-203 ISSN: … 1.pdf · 2021. 7. 12. ·...
35
Reserva de derechos de autor: 04-2019-1030-16243300-203 ISSN: 2683-264X www.joom.org.mx Ciudad de México. México. No. 1 Julio-Diciembre 2019 OBJETOS MATEMÁTICOS: • Apuntes sobre dos teoremas de la Geometría Diferencial. Francisco Guillermo Herrera Armendia. OBJETIVOS MATEMÁTICOS: • Diseño y construcción de un manipulador industrial de cinco grados de libertad: Modelado matemático y análisis del efector final. Marcos Fajardo Rendón FENÓMENOS DE CORTE SOCIAL, ANTROPOLÓGICO Y COGNITIVO • Subdominios y categorías del conocimiento especializado que emergen en el futuro docente al enseñar la construcción de círculos. Marleny Hernández Escobar. • Una visión de la currícula en Matemáticas Isaac Villavicencio Gómez
Transcript of Reserva de derechos de autor: 04-2019-1030-16243300-203 ISSN: … 1.pdf · 2021. 7. 12. ·...

Reserva de derechos de autor: 04-2019-1030-16243300-203 ISSN: 2683-264X
www.joom.org.mx
Ciudad de México. México. No. 1 Julio-Diciembre 2019
OBJETOS MATEMÁTICOS:
• Apuntes sobre dos teoremas de la Geometría Diferencial.
Francisco Guillermo Herrera Armendia.
OBJETIVOS MATEMÁTICOS:
• Diseño y construcción de un manipulador industrial de cinco grados de
libertad: Modelado matemático y análisis del efector final.
Marcos Fajardo Rendón
FENÓMENOS DE CORTE SOCIAL, ANTROPOLÓGICO Y COGNITIVO
• Subdominios y categorías del conocimiento especializado que emergen en el
futuro docente al enseñar la construcción de círculos.
Marleny Hernández Escobar.
• Una visión de la currícula en Matemáticas
Isaac Villavicencio Gómez

Francisco Guillermo Herrera Armendia
Editor en Jefe.
Marcos Fajardo Rendón
Editor Ejecutivo.
Isaac Villavicencio Gómez
Coordinador Editorial.
CONSEJO PERIODISTA
Efraín Valencia Calzadilla
Sealtiel Pichardo Jiménez
Gregorio Montes de Oca Godínez
Areli Guadalupe Mateos Sanchez
COMITÉ CIENTÍFICO
Vitaliano Acevedo Silva
Marleny Hernández Escobar
Enrique Salazar Peña
María de Jesús Sentiés Nacaspac
Raciel Trejo Reséndiz
PRODUCCIÓN
Francisco Guillermo Herrera Armendia, Marcos Fajardo Rendón e Isaac Villavicencio
Gómez
Webmaster Web Designer
Marcos Fajardo Rendón Juan Carlos Olivo Moya
JOURNAL DE OBJETOS Y OBJETIVOS MATEMÁTICOS, No. 1, julio-
diciembre 2019, es una Publicación semestral editada por Francisco Guillermo
Herrera Armendia con domicilio en Av. Zarzaparrillas 201 casa 12-A, Col. los
Héroes Coacalco, Coacalco de Berriozabal, Estado de México, C.P. 55712,
www.joom.org.mx, [email protected].
Editor responsable: Marcos Fajardo Rendón.
Reserva de Derechos al Uso Exclusivo No. 04-2019-103016243300-203 otorgado
por la Dirección de Reservas de Derechos del Instituto Nacional del Derecho de
Autor, ISSN 2683-264X.
Responsable de la última actualización de este Número, Isaac Villavicencio
Gómez con domicilio Pedro Mz. 10 Bis Lt 12-A; La Purísima, Ecatepec, Estado
de México, C.P. 5031, fecha de la última modificación 01 de junio de 2019.

Journal de Objetos y Objetivos Matemáticos
Número 1
Julio-Diciembre 2019
Journal de Objetos y Objetivos Matemáticos es una revista semestral revisada por pares de Acceso
Abierto que publica artículos de investigación originales, así como ensayos teóricos en todos los
aspectos de los objetos de las matemáticas puras y aplicadas.
Journal de Objetos y Objetivos Matemáticos es una literatura de Acceso Abierto bajo la BOAI
(Budapest Open Access Initiative) y el modelo Open Access, lo que significa la disponibilidad de
acceso libre mediante Internet al público, permitiendo a cualquier usuario su lectura, descarga,
copia, distribución, impresión, almacenamiento, búsqueda, digitalización o vínculo a los textos
completos de estos artículos para su rastreo e indexado; sin necesidad de compensación financiera,
legal o algún otro tipo.
La presentación y disposición en conjunto de cada página de Journal de Objetos y Objetivos
Matemáticos núm. 1, julio-diciembre de 2019, son propiedad de sus respectivos autores. En cada
artículo publicado los autores conservan los derechos de autoría de su trabajo, pero los lectores son
libres de reutilizar el material siempre y cuando se den las citas correspondientes adecuadamente,
no sea modificado ni usado con fines comerciales; ya que todos los artículos se publican bajo la
licencia de atribución Creative Commons (CC BY-NC-ND).
Las opiniones expresadas por los autores en Journal de Objetos y Objetivos Matemáticos no
necesariamente reflejan la postura de los editores de la publicación.

2
Contenido
Carta del Editor 3
OBJETOS MATEMÁTICOS Apuntes sobre dos teoremas de la Geometría Diferencial.
Notes on two theorems of Differential Geometry. Francisco Guillermo Herrera Armendia
4
OBJETIVOS MATEMÁTICOS
Diseño y construcción de un manipulador industrial de cinco grados de libertad: Modelado
matemático y análisis del efector final.
Design and manufacture of an industrial manipulator with five degrees of freedom:
Mathematical modeling and final effector analysis. Marcos Fajardo Rendón
10
FENÓMENOS DE CORTE SOCIAL, ANTROPOLÓGICO Y COGNITIVO
El conocimiento especializado identificado en las clases de geometría impartidas por el
futuro docente
Specialized knowledge identified in the geometry classes taught by the future teacher Marleny Hernández Escobar
Una visión de la currícula en Matemáticas
A perspective of the curriculum in Mathematics Isaac Villavicencio Gómez
22
28

3
CARTA DEL EDITOR
Con el propósito de contribuir a la divulgación del conocimiento matemático, el grupo
de docentes – investigadores que integramos el Cuerpo Académico “Enseñanza y
Aprendizaje de las Matemáticas en la Formación Inicial y la Educación Básica”, ofrecemos
al público interesado en la matemática y su entorno, una publicación semestral titulada
Journal de Objetos y Objetivos Matemáticos (JOOM) que incluye reportes de investigación,
comentarios sobre obras matemáticas, experiencias áulicas de enseñanza y aprendizaje y
breves ensayos, que representan el producto del trabajo individual y colectivo de los
miembros de este equipo de investigación. Las secciones que conforman la publicación
permiten insertar de manera oportuna las contribuciones recibidas y son: Objetos
Matemáticos, con la intención de tratar exclusivamente los axiomas, teoremas y su
demostración, corolarios y lemas, todos relacionados con la matemática pura. En la sección
Objetivos Matemáticos se incluyen producciones relacionadas con la aplicación de la
matemática a otras ramas del conocimiento; también en esta sección aparecen contribuciones
relacionadas con la didáctica de la matemática (en el estricto sentido del orden en que se
abordan los objetos matemáticos y la forma en que son transmitidos a los estudiantes). La
sección Fenómenos de Corte Social, Antropológico y Cognitivo aborda el proceso enseñanza-
aprendizaje entre los docentes y los estudiantes en el salón de clase.
Durante el año 2019 se consolida esta empresa; misma que surge como una idea que
fue tomando forma hasta consolidarse; año que se relaciona con los siguientes eventos: En
1811 S. D. Poisson publica en Paris su Tratado de Mecánica; en 1872 se publica una excelente
obra didáctica inglesa sobre los Elementos de Euclides dedicada a estudiantes que hoy en día
cursarían la secundaria y el bachillerato escrita por I. Todhunter; 1889, Peano publica su obra
Arithmetices Principia; en 1901 aparece la segunda edición del segundo volumen de William
Rowan Hamilton titulada Los Cuaterniones; también en ese año se publica la primer
traducción inglesa de la obra de Richard Dedekind titulada Ensayos sobre Teoría de
Números; en 1957 la Universidad de Minnesota publica la obra de Oystein Ore titulada Niels
Henri Abel; en 1963 la Sociedad Matemática Americana en colaboración con el MIT
publican la traducción inglesa de la obra conjunta de Alexandrov, Kolmogorov y Laurentiev
originalmente publicada en ruso titulada Las Matemáticas: su contenido, métodos y
significado. Son sólo algunos títulos cuyos años de publicación se relacionan con 2019 por
haber tenido la misma secuencia de días en el calendario (1872 a partir del 1 de marzo); es
decir que la secuencia calendárica de 2019→ 𝑆𝑠𝑒𝑞≡ 0 mod 7 para los años mencionados. Con
este buen augurio publicamos este primer número que ponemos a consideración de nuestros
lectores. Deseamos que el propósito central de esta publicación sea logrado y que sea de
interés y utilidad para nuestros lectores.
Los editores.

Journal Objetos y Objetivos Matemáticos No. 1; julio-diciembre 2019.
ISSN 2683-264X. https://joom.org.mx
© Autor(es) 2019. Artículo de acceso abierto bajo licencia CC BY-NC-ND 4
Apuntes sobre dos teoremas de la Geometría
Diferencial.
Francisco Guillermo Herrera Armendia.
Escuela Normal Superior de México, Manuel Salazar 201 Colonia Ex-hacienda del Rosario, Azcapotzalco,
02420 CDMX, México.
Resumen- El estudio analítico de las curvas y las superficies
ha tenido un amplio desarrollo dentro de la matemática en sí, y
también ha contribuido a sustentar importantes enunciados en
la física – matemática. Se analizan dos teoremas de importancia
en el sentido geométrico – diferencial, con el propósito de
considerar su valor axiomático en el estudio de la matemática
moderna. Palabras Clave- Geometría diferencial. Teorema Egregium.
Teorema Gauss – Bonnet.
Abstract- The analytical study of the curves and surfaces has had an extensive development within mathematics itself, and has also contributed to sustain heavy set forth in physics -
mathematics. It is discussed the two theorems of importance in the geometric sense - differential, with the purpose to consider its axiomatic value to study the modern mathematics.
Keywords- Differential Geometry. Egregium theorem. Gauss theorem - Bonnet..
Sleutelwoorden- Differentiaalmeetkunde. Stelling van
Egregium. Stelling van Gauss - Bonnet.
Zusammenfassung- Die analytische Untersuchung der
Kurven und Flächen hat eine umfangreiche Entwicklung
innerhalb der Mathematik selbst hatte und hat auch dazu
beigetragen, Schwere, die in der Physik - Mathematik gesetzt
erhalten. Es ist den beiden theoreme der Bedeutung im
geometrischen Sinne - Differential diskutiert, mit dem Ziel die
axiomatische Wert in das Studium der modernen Mathematik
zu betrachten.
Mathematical Subject Classification: 53-02.
I. INTRODUCCIÓN
Un primer intento por definir la curvatura en un punto P
de una superficie S en un espacio tridimensional fue
expresarlo en términos de la curvatura de las curvas del
plano, tomando en consideración las secciones de S como
planos a través de la normal en P [1]. Desde luego que planos
normales diferentes a la superficie en P pueden intersecar la
superficie en curvas muy diferentes que incluyen curvaturas
también distintas. Sin embargo, entre todas estas curvas
existe una de máxima curvatura, y desde luego, una de
mínima curvatura (que puede ser negativa debido al convenio
de asignar una curvatura de acuerdo al lado sobre el cual el
centro de curvatura se extiende. Leonard Euler en 1760
mostró que estas dos curvaturas 𝜅1 y 𝜅2 denominadas
curvaturas principales, se forman en secciones
perpendiculares y que, juntas, determinan la curvatura 𝜅 en
una sección determinada con un ángulo 𝛼 a una de las
secciones principales con base en la expresión: 𝜅 =𝜅1𝑐𝑜𝑠2𝛼 + 𝜅2𝑠𝑒𝑛2𝛼. Es así que se tiene una condición
suficiente y necesaria, siempre y cuando la curvatura de las
superficies se subordine a la curvatura de
las curvas en el plano. Una idea mucho más profunda, se le
debe a Gauss en el desarrollo de su trabajo en geodesia
(concretamente en agrimensura y cartografía), en estos
términos: la curvatura de una superficie se puede detectar
intrínsecamente, es decir, por las medidas que se realizan
completamente sobre la superficie. Así, la curvatura de la
tierra se conoció con base en las medidas realizadas por
exploradores y expertos que en esa época no tenían una
perspectiva desde una altura adecuada (como en la
actualidad). En 1827, Gauss realizó el extraordinario
descubrimiento de que la cantidad 𝜅1𝜅2 se pueden definir
intrínsecamente, por ello pueden ocuparse como una medida
intrínseca de curvatura. Estaba tan orgulloso de su resultado
que lo llamó Theorema Egregium o Teorema Excelente, y es
particularmente interesante que en particular que 𝜅1𝜅2
llamada la Curvatura Gausiana no es afectada por flexión
alguna (sin arrugas ni estiramientos). El plano, por ejemplo
conserva 𝜅1 = 𝜅2 = 0, es decir una curvatura Gaussiana
cero. De tal forma que es posible obtener cualquier
superficie doblando el plano, como por ejemplo, el cilindro.
Es posible verificar el Teorema Excelente o destacable es
este caso debido a que una de las curvaturas principales de un
cilindro es obviamente cero. Las superficies 𝑆1 , 𝑆2 obtenidas
unas de otras por medio del doblez se dice que son
isométricas, más precisamente, 𝑆1 , 𝑆2 son isométricas si
existe una correspondencia uno a uno entre los puntos 𝑃1 de
𝑆1 y los puntos 𝑃2 de 𝑆2 de tal manera que la distancia entre
𝑃1 y 𝑃′1 en 𝑆1 sea exactamente igual a la distancia entre 𝑃2 y
𝑃′2 en 𝑆2 y donde las distancias se miden dentro de las
respectivas superficies. En un estado más preciso del
teorema, se tiene que si 𝑆1 , 𝑆2 son isométricos, entonces
𝑆1 , 𝑆2 tienen la misma curvatura Gaussiana en los puntos
correspondientes; sin embargo, la afirmación inversa no es
verdadera: existen superficies 𝑆1 , 𝑆2 que no son isométricas a
pesar de que exista una correspondencia continua y uno a
uno entre ellas, por lo que la curvatura Gaussiana es la
misma en los puntos correspondientes. Para superficies de
curvatura Gaussiana constante existe un mejor acuerdo entre
isometría y curvatura (Gaussiana). Tiempo después se
discute una interesante generalización de las superficies
curvadas conocida como el Teorema Gauss – Bonnet, cuya
idea central se refiere a que la superficie curvada 𝜅 se puede
reemplazar por la curvatura geodésica 𝜅𝑔, propuesto por

Journal Objetos y Objetivos Matemáticos No. 1; julio-diciembre 2019.
ISSN 2683-264X. https://joom.org.mx
© Autor(es) 2019. Artículo de acceso abierto bajo licencia CC BY-NC-ND 5
Bonnet en 1848 con base en la proposición: ∫ 𝜅𝑔 𝑑𝑠 =𝒞
2𝜋 − ∬ 𝜅1𝜅2 𝑑𝐴ℛ
, donde A denota el área, ℛ indica la
región encerrada por 𝒞. A este respecto, Gauss publicó
solamente un caso especial, o más bien el límite de un caso
especial en el que 𝒞 es un triángulo geodésico. En este caso,
𝜅𝑔 = 0 a lo largo de los lados de 𝒞, además 𝜅𝑔 se vuelve
infinita en las esquinas cuya consecuencia se denomina
exceso angular y que Gauss dio a conocer en 1827 su
resultado: 𝑒𝑥𝑐𝑒𝑠𝑜 𝑎𝑛𝑔𝑢𝑙𝑎𝑟 = ∬ 𝜅1𝜅2 𝑑𝐴ℛ
. Si se observa a
detalle, se infiere que la integral de la curvatura Gaussiana
tiene un significado geométrico más elemental que la
curvatura 𝜅1𝜅2. En una carta publicada por Gauss en 1846
afirmó ya haber conocido el término exceso angular desde
1794.
II. EL TEOREMA EGREGIUM DE GAUSS.
Definición 1. Sea 𝑓 una inmersión de una variedad
diferenciable m-dimensional M de clase 𝐶𝑟 en un espacio
Euclidiano n-dimensional 𝐸𝑛 [2].
Esta condición permite que f sea un mapeo diferencial de
clase 𝐶𝑟, tal que la diferencial 𝑑𝑓𝑝 es inyectiva en cualquier
punto p de M. Además, la imagen 𝑓(𝑀) no es
necesariamente una sub-variedad de 𝐸𝑛. Por ello, el par
(𝑀, 𝑓) se denomina sub-variedad inmersa (o también
superficie) de 𝐸𝑛. Si m = 1, entonces es la curva de 𝐸𝑛; si
𝑚 = 𝑛 − 1, es la hipersuperficie en 𝐸𝑛.
Las variedades diferenciables o geometría diferencial de
las curvas y las superficies, cuando 𝑛 = 2 ; 𝑛 = 3 son
también casos importantes de estudio en este contexto.
En este sentido, un difeomorfismo entre dos superficies
que conservan la longitud de arco es equivalente a la
condición de que las primeras cantidades fundamentales de
las superficies coinciden en cada par de puntos
correspondientes, dado que se han introducido parámetros
sobre las dos superficies, así que los puntos correspondientes
conservan los mismos valores paramétricos. En este caso,
tenemos una isometría.
A partir de la ecuación de Gauss podemos observar que el
total de la curvatura depende solamente de las primeras
cantidades fundamentales. Entonces K es una cantidad que es
conservada bajo mapeos isométricos (Teorema egregium, o
destacable, de Gauss).
Definición 2. �̅�1 = 𝐹∗(𝐸1), �̅�2 = 𝐹∗(𝐸2). Debido a que 𝐹∗
conserva el punto producto, �̅�1 , �̅�2 es un campo de referencia
sobre �̅�, puesto que:
�̅�𝑖 ∙ �̅�𝑗 = 𝐹∗(𝐸)𝑖 ∙ 𝐹∗(𝐸)𝑗 = 𝐸𝑖 ∙ 𝐸𝑗 = 𝛿𝑖𝑗 . (1)
Lema 1. Sea 𝐹: 𝑀 → �̅� una isometría, y 𝐸1 , 𝐸2 un
campo de referencia tangencial sobre 𝑀. Si �̅�1 , �̅�2 es el
campo de referencia transferido sobre �̅� , entonces tenemos
dos condiciones:
(1) 𝜃1= 𝐹∗(�̅�)1 , 𝜃2 = 𝐹∗(�̅�)2
ω12 = 𝐹∗(�̅�)12 .
Prueba. (1) Es suficiente probar que 𝜃𝑖 y 𝐹∗(�̅�)𝑖 poseen
el mismo valor sobre 𝐸1 y 𝐸2. Sin embargo, para 1 ≤ 𝑖 , 𝑗 ≤2 se tiene:
𝐹∗(�̅�𝑖)(𝐸𝑗) = �̅�𝑖(𝐹∗𝐸𝑗) = �̅�𝑖(�̅�𝑗) = 𝛿𝑖𝑗 = 𝜃𝑖(𝐸𝑗) . (2)
(2). Es necesario tomar en cuenta la ecuación estructural
𝑑�̅�1 = �̅�12 ∧ �̅�2 sobre �̅�. Al aplicar 𝐹∗, se tiene:
𝑑(𝐹∗�̅�1) = 𝐹∗(𝑑�̅�1) = 𝐹∗(�̅�12) ∧ 𝐹∗(�̅�2) , por el
concepto de mapeo de superficies.
De ello, y por (1), se tiene que:
𝑑(𝜃1) = 𝐹∗(�̅�12) ∧ 𝜃2 . (3)
La otra ecuación estructural:
𝑑�̅�2 = �̅�21 ∧ �̅�1 (4)
Genera una ecuación correspondiente:
𝑑𝜃1 = 𝐹∗(�̅�12) ∧ 𝜃2 (5)
𝑑𝜃2 = 𝐹∗(�̅�21) ∧ 𝜃1 (6)
Por esta razón (2) es una consecuencia inmediata de la
propiedad de unicidad, puesto que la forma de conexión
𝜔12 = −𝜔21 es la única 1-forma que satisface las primeras
ecuaciones estructurales:
𝑑𝜃1 = 𝜔12 ∧ 𝜃2 ; 𝑑𝜃2 = 𝜔21 ∧ 𝜃1 .
El enunciado del Teorema egregium de Gauss, sostiene
que [3]:
Teorema 1.
Una curvatura Gaussiana es una invariante isométrica, es
decir: Si 𝐹: 𝑀 → �̅� es una isometría, entonces 𝐾(𝑝) =𝐾(𝐹(𝒑)) para cualquier punto 𝒑 en 𝑀.
Prueba. Para un punto arbitrario 𝒑 de 𝑀 se selecciona
un campo de referencia tangente 𝐸1 , 𝐸2 en alguna vecindad
de 𝒑 y se transfiere vía 𝐹∗ hacia �̅�1, �̅�2 sobre �̅�. Entonces,
𝐹∗(�̅�12) = 𝜔12 por lema 1. Además, 𝑑�̅�12 = −𝐾 �̅�1 ∧ �̅�2,
por ser la segunda ecuación estructural y derivar de ella una
nueva interpretación de curvatura Gaussiana: las 𝜔12
representan medidas del rango de rotación del campo de
referencia tangente 𝐸1 y 𝐸2 , puesto que K determina la
derivada exterior 𝑑𝜔12 y se transforma en un tipo de
“segunda derivada” de 𝐸1 , 𝐸2.
Al aplicar 𝐹∗ a esta última ecuación, y como
consecuencia de los resultados del mapeo de superficies, se
tiene:
𝑑(𝐹∗�̅�12) = 𝐹∗(𝑑�̅�12) = −𝐹∗(𝐾)𝐹∗(�̅�1) ∧ 𝐹∗(�̅�2) (7)
En que 𝐹∗(𝐾) es simplemente la función compuesta
𝐾(𝐹). Así, con base en el Lema 1:

Journal Objetos y Objetivos Matemáticos No. 1; julio-diciembre 2019.
ISSN 2683-264X. https://joom.org.mx
© Autor(es) 2019. Artículo de acceso abierto bajo licencia CC BY-NC-ND 6
𝑑𝜔12 = −𝐾(𝐹)𝜃1 ∧ 𝜃2 . (8)
La comparación con 𝑑𝜔12 = −𝐾𝜃1 ∧ 𝜃2 establece
𝐾 = 𝐾(𝐹), y de ello, en particular:
𝐾(𝒑) = 𝐾(𝐹(𝒑)).
III. CURVATURA TOTAL GAUSSIANA.
En otro sentido Iyanaga afirma que un campo vectorial
𝜆𝛼(𝑡)𝑥𝛼 definido a lo largo de la curva 𝑢𝛼 = 𝑢𝛼(𝑡) sobre
una superficie es paralela en el sentido de Levi – Civita a lo
largo de la curva si su derivada covariante a lo largo de la
curva se desvanece, es decir:
𝛿𝜆𝛼
𝑑𝑡=
𝑑𝜆𝛼
𝑑𝑡+
{𝛼
𝛽𝛾}𝜆𝛽𝑑𝑢𝛾
𝑑𝑡= 0 (9)
Sea 𝜌 la curvatura sobre una curva 𝐶 de clase 𝐶2 sobre
una superficie 𝑆 de clase 𝐶2 y sea 𝜎 el ángulo entre la
binormal de 𝐶 y la normal de 𝑆 en el mismo punto. Entonces,
𝜌𝑔 = 𝜌 cos 𝜎 es una cantidad perteneciente a la geometría
sobre una superficie y se denomina curvatura geodésica de la
curva en el punto. Así, una curva con curvatura geodésica
desvaneciente se denomina geodésica, que satisface las
ecuaciones diferenciales:
𝑑2𝑢𝛼
𝑑𝑠2 + {𝛼
𝛽𝛾}𝑑𝑢𝛽
𝑑𝑠 𝑑𝑢𝛾
𝑑𝑠= 0 (10)
Así, el desarrollo de una geodésica es una línea recta
(Variedades Riemannianas). Es necesario considerar el
dominio limitado orientable D simplemente conectado sobre
una superficie, tal que el límite de D es una curva simple C
cerrada que consiste de un número finito de arcos de clase
𝐶2.
Al denotar por 𝛼𝑖 , (𝑖 = 1, 2, … , 𝑚) a los ángulos externos
en los vértices del polígono curvilíneo, se observa lo
siguiente:
∫ 𝜌𝑔𝑑𝑠 + ∑ 𝛼𝑖 + ∬ 𝐾𝑑𝛼 = 2𝜋𝐷
𝑚𝑖=1𝐶
(11)
Este enunciado es conocido como la fórmula de Gauss –
Bonnet. Si todos los arcos de C son geodésicos, se tiene:
∑ 𝛼𝑖 + ∬ 𝐾𝑑𝛼 = 2𝜋𝐷
𝑚𝑖=1 (12)
Al observar esta expresión, se advierte que implica como
casos especiales dos teoremas bien conocidos de la geometría
euclidiana y de la trigonometría esférica, que son: a) la suma
de los ángulos interiores de todo triángulo es igual a 𝜋; el
área de un triángulo esférico es proporcional a su exceso
esférico. Además, también se relaciona con la siguiente
proposición: sobre cualquier superficie orientada cerrada
tenemos que:∬ 𝐾 𝑑𝛼 = 2𝜋𝜒, en que 𝜒 representa la
característica Euleriana de la superficie, de modo que
∬ 𝐾 𝑑𝛼 es la integral de curvatura o curvatura total
Gaussiana.
IV. EL TEOREMA GAUSS – BONNET.
Se ha observado con anterioridad que la curvatura
Gaussiana K de una superficie geométrica M tiene gran
influencia sobre otras características geométricas de M, como
son las paralelas, la translación, la geodésica, las isometrías y
sin lugar a dudas, la forma de M si se da el caso que está en
𝐸3, como lo propone O’Neill. Es más, el pensamiento
topológico es profundamente influenciado por esta curvatura,
sobre todo en el concepto de topología conformacional de M,
cuyas propiedades son completamente independientes de la
estructura geométrica particular de M. La idea principal de
esta situación es un teorema relacionado con la curvatura
total de un bi – segmento ( 2-segmento) con la cantidad total
de giro de la curva límite. Para una curva arbitraria 𝛼 en 𝑀,
la curvatura geodésica explica su rango de giro relativo a la
longitud de arco. De esta forma, para evaluar la cantidad total
que 𝛼 gira, es necesario integrar con respecto a la longitud de
arco.
Definición 3. Sea 𝛼: [𝑎, 𝑏] → 𝑀 un segmento curvo
regular en una superficie geométrica orientada M. La
curvatura total geodésica ∫ Κ𝑔𝑑𝑠𝛼
de 𝛼 es:
∫ 𝐾𝑔(𝑠) 𝑑𝑠𝑠(𝑏)
𝑠(𝑎) (13)
Donde 𝐾𝑔(𝑠) es la curvatura geodésica de una
reparametrización unidad – velocidad de 𝛼 .
La curvatura total geodésica de 𝛼 en M es una analogía
de la curvatura total Gaussiana de una superficie en 𝐸3.
Lema 2. Sea 𝛼: [𝑎, 𝑏] → 𝑀 un segmento curvo regular en
una región de M orientada por un campo de referencia 𝐸1 , 𝐸2
, entonces:
∫ 𝐾𝑔 𝑑𝑠 = 𝜑(𝑏) − 𝜑(𝑎) + ∫ 𝜔12𝛼𝛼 (14)
Donde 𝜑 es un ángulo función desde 𝐸1 hasta 𝛼′ hasta 𝛼,
y 𝜔12 es la forma de conexión de 𝐸1 , 𝐸2 .
Prueba. Ninguno de estos términos son afectados por la
reparametrización que conserva la orientación, por ello 𝛼
representa una curva de unidad – velocidad. El resultado
obtenido se demuestra con el siguiente argumento: 𝛽
representa una curva de unidad – velocidad en una región
orientada por un campo de referencia 𝐸1 , 𝐸2 ; además, si 𝜑
es una función angular desde 𝐸1 y hasta 𝛽′ , a través de 𝛽,
entonces:
𝐾𝑔 =𝑑𝜑
𝑑𝑠+ 𝜔12(𝛽′) . (15)
Y que a su vez se apoya en la definición de función
angular.
∎
Es necesario imponer el requerimiento más riguroso. Sea
𝑥 un elemento uno a uno y además regular sobre el límite en

Journal Objetos y Objetivos Matemáticos No. 1; julio-diciembre 2019.
ISSN 2683-264X. https://joom.org.mx
© Autor(es) 2019. Artículo de acceso abierto bajo licencia CC BY-NC-ND 7
𝑅. En otros términos, equivale a afirmar que 𝑥: 𝑅 → 𝑀 es la
restricción a 𝑅 de una ruta definida sobre algún conjunto
abierto que contiene a 𝑅. Ahora, cuando 𝑥 es un bi-segmento
(2-segmento) regular, uno a uno, las curvas de sus aristas
𝛼, 𝛽, 𝛾, 𝛿 son regulares uno a uno y podemos pensar que el
límite 𝜗𝑥 = 𝛼 + 𝛽 − 𝛾 − 𝛿 como una simple curva rota que
envuelve la región rectangular 𝑥(𝑅). Esta afirmación se
argumenta con la siguiente definición:
Sea 𝑥: 𝑅 → 𝑀 un bi-segmento (2-segmento) en M con R
el rectángulo cerrado 𝑎 ≤ 𝑢 ≤ 𝑏 , 𝑐 ≤ 𝑣 ≤ 𝑑. Las aristas
curvadas de x son el uni-segmento (1-segmento)
𝛼, 𝛽, 𝛾, 𝛿, tales que:
𝛼(𝑢) = 𝑥(𝑢, 𝑐)
𝛽(𝑣) = 𝑥(𝑏, 𝑣)
𝛾(𝑢) = 𝑥(𝑢, 𝑑)
𝛿(𝑣) = 𝑥(𝑎, 𝑣)
Entonces, el límite 𝜗𝑥 del bi-segmento (2- segmento) 𝑥 es
la expresión formal:
𝜗(𝑥) = 𝛼 + 𝛽 − 𝛾 − 𝛿. (16)
Estos cuatro segmentos curvados son el resultado de
haber considerado la función 𝑥: 𝑅 → 𝑀 solamente sobre las
cuatro líneas segmento que comprimen el límite del
rectángulo R. El signo operador “menos” que antecede a 𝛾 , 𝛿
en 𝜗(𝑥), nos recuerda que 𝛾 , 𝛿 se deben “reservar” para
proporcionar un recorrido consistente alrededor de la parte
curvada de 𝑅 y también de 𝒙. Entonces, si 𝜙 es una uni-
forma (1-forma) sobre M, la integral de 𝜙 sobre el límite de x
se define así:
∫ 𝜙 = ∫ 𝜙 + ∫ 𝜙 − ∫ 𝜙 − ∫ 𝜙𝛿𝛾𝛽𝛼𝜗𝑥
(17)
Se llega al momento de definir la curvatura geodésica
total de 𝜗(𝑥). Esta definición muestra que el total de la
curvatura geodésica de una curva es simplemente el ángulo
total que gira la tangente unitaria T (relativo a la longitud de
arco). Pero para recorrer todo el camino alrededor, se tiene
que:
𝜗(𝑥) = 𝛼 + 𝛽 − 𝛾 − 𝛿 (18)
No solamente se obtiene el total de giro en las curvas de
borde, es decir:
∫ 𝐾𝑔 𝑑𝑠 = ∫ 𝐾𝑔 𝑑𝑠 + ∫ 𝐾𝑔 𝑑𝑠 + ∫ 𝐾𝑔 𝑑𝑠 +−𝛾𝛽𝛼𝜗𝑥
∫ 𝐾𝑔 𝑑𝑠 =−𝛿
= ∫ 𝐾𝑔 𝑑𝑠 + ∫ 𝐾𝑔 𝑑𝑠 − ∫ 𝐾𝑔 𝑑𝑠 − ∫ 𝐾𝑔 𝑑𝑠𝛿𝛾𝛽𝛼
(19)
Además, también los ángulos a través de los que una
unidad tangente 𝑇 sobre 𝜗(𝑥) debería girar a las cuatro
esquinas de la región rectangular 𝑥(𝑅). Así, se tiene:
𝑅: 𝑎 ≤ 𝑢 ≤ 𝑏 , 𝑐 ≤ 𝑣 ≤ 𝑑
Para estas “esquinas”
𝑝1 = 𝑥(𝑎, 𝑐) , 𝑝2 = 𝑥(𝑏, 𝑐) , 𝑝3 = 𝑥(𝑏, 𝑑) ,𝑝4 = 𝑥(𝑎, 𝑑)
Todos ellos denominados los vértices de 𝑥(𝑅) .
Así, se puede afirmar que, en general, si un segmento
curvo regular 𝛼 en una región orientada termina en el punto
de inicio de otro segmento 𝛽, descritos como 𝛼(1) = 𝛽(0),
entonces el ángulo de giro 휀 desde 𝛼 hasta 𝛽 es el ángulo
orientado desde 𝛼′(1) a 𝛽′(0) el cual es el más pequeño en
valor absoluto. Para un bi-segmento (2-segmento), es
posible utilizar la orientación determinada por x, esto es, el
área contenida en 𝑑𝑀 tal que 𝑑𝑀(𝑥𝑢 ,𝑥𝑣) > 0, para fijar, de
alguna manera, una terminología que es familiar en el caso
de un polígono en el plano.
Definición 4. Sea 𝑥: 𝑅 → 𝑀 un bi-segmento (2-
segmento) regular uno a uno, con vértices 𝒑1, 𝒑2, 𝒑3, 𝒑4. El
ángulo exterior 휀 de 𝒙 en 𝒑𝑗 (1 ≤ 𝑗 ≤ 4) es el ángulo de giro
en 𝒑𝑗 derivado de las curvas de las aristas 𝛼, 𝛽, −𝛾, −𝛿, 𝛼, …,
en orden de ocurrencia en 𝜗(𝑥) . El ángulo interior 𝜄𝑗 de 𝒙 en
𝒑𝑗 es 𝜋 − 휀𝑗. Específicamente, los ángulos exteriores pueden
fácilmente expresarse en términos de las coordenadas
angulares usuales 𝜗 desde 𝒙𝑢 hasta 𝒙𝑣 (0< 𝜗 < 𝜋), de esta
forma:
휀1 = 𝜋 − 𝜗1 , 휀2 = 𝜗2 , 휀3 = 𝜋 − 𝜗3 , 휀4 = 𝜗4 (20)
Donde 𝜗𝑗 representa la coordenada angular en el vértice
𝒑𝒋 .
Teorema 2.
Sea 𝑥: 𝑅 → 𝑀 bi-segmento (2-segmento) regular uno a
uno en una superficie geométrica 𝑀. Si 𝑑𝑀 es la forma del
área sobre 𝒙(𝑅) determinada por 𝒙, entonces:
∬ 𝐾 𝑑𝑀 + ∫ 𝐾𝑔 𝑑𝑠 + (휀1 + 휀2 + 휀3 + 휀4) = 2𝜋𝜗𝑥𝑥
(21)
El primer sumando de la expresión corresponde a una
doble integral y representa la curvatura total Gaussiana de 𝒙,
mientras que el segundo sumando que corresponde a una
integral simple, denota la curvatura total Gaussiana de 𝜗𝑥.
Es importante aclarar que la curvatura geodésica y los
ángulos exteriores utilizan la orientación de 𝑥(𝑅) dadas por
𝑑𝑀, en que 𝑑𝑀(𝒙𝑢 , 𝒙𝑣) > 0. Es de notarse que 𝑀 en sí, no
requiere orientarse e inclusive ser orientable.
Se denomina a este resultado la fórmula Gauss – Bonnet
con ángulos exteriores. Puesto que 휀𝑗 = 𝜋 − 𝜄𝑗 para 1 ≤ 𝑗 ≤
4, la expresión puede reescribirse de esta forma:
∬ 𝐾 𝑑𝑀 + ∫ 𝐾𝑔 𝑑𝑠 = (𝜄1 + 𝜄2 + 𝜄3 + 𝜄4) = 2𝜋𝜗𝑥𝑥
(22)
En términos de los ángulos interiores de 𝒙(𝑅) .

Journal Objetos y Objetivos Matemáticos No. 1; julio-diciembre 2019.
ISSN 2683-264X. https://joom.org.mx
© Autor(es) 2019. Artículo de acceso abierto bajo licencia CC BY-NC-ND 8
Prueba.
Sea 𝐸1 =𝑥𝑢
√𝐸 sobre la región 𝒙(𝑅). Entonces, sea 𝐸2 el
campo vectorial único tal que 𝐸1 , 𝐸2 es un campo de
referencia con 𝑑𝑀 (𝐸1 , 𝐸2) = +1. Así, la segunda
ecuación estructural tiene la forma:
𝑑𝜔12 = −𝐾𝜃1 ∧ 𝜃2 = −𝐾 𝑑𝑀, con base en el Teorema
de Stroke, que enuncia lo siguiente:
Si 𝜙 representa una uni-forma (1-forma) sobre M, y sea
𝑥: 𝑅 → 𝑀 un bi – segmento (2-segmento), entonces:
∬ 𝑑𝜙 = ∫ 𝜙𝜗𝑥𝑥
.
Por ello, ahora tenemos la siguiente expresión:
∬ 𝐾 𝑑𝑀 + ∫ 𝜔12 = 0𝜗𝑥𝑥
(23)
Entonces, por Lema 2, tenemos:
∫ 𝜔12 = ∫ 𝜔12 + ∫ 𝜔12𝛽− ∫ 𝜔12 − ∫ 𝜔12𝛿𝛾𝛼𝜗𝑥
.
(24)
Ahora, sobre 𝛼 tenemos 𝛼′ = 𝑥𝑢 = √𝐸 𝐸1 , así que el
ángulo 𝜑 desde 𝐸1 hasta 𝛼′ es idéntico a cero. También, por
Lema 2:
∫ 𝜔12 = ∫ 𝐾𝑔 𝑑𝑠𝛼𝛼
(25)
Ahora, para el caso: ∫ 𝜔12𝛿, donde al ángulo 𝜑, desde
𝐸1 =𝒙𝑢
√𝐸 hasta 𝜗′ = 𝒙𝑣 es justamente la coordenada angular
𝜗 desde 𝒙𝑢 a 𝒙𝑣 . Una vez más, por el Lema 2, se obtiene:
∫ 𝐾𝑔 𝑑𝑠 = 𝜗4 − 𝜗1 + ∫ 𝜔12𝜗𝜗 (26)
Donde, 0 < 𝜗𝑗 < 𝜋 es la coordenada angular en el vértice
𝑝𝑗, de 𝑥, (1 ≤ 𝑗 ≤ 4). Sin embargo, como 𝜗1 = 𝜋 − 휀1 y
𝜗4 = 휀4, se reescribe la expresión:
∫ 𝜔12 = 𝜋 − 휀1 − 휀4 + ∫ 𝐾𝑔 𝑑𝑠𝜗𝜗
. (27)
Expresión que posee una forma similar:
∫ 𝜔12 = −𝜋 + 휀2 + 휀3 + ∫ 𝐾𝑔 𝑑𝑠𝛽𝛽
(28)
o también:
∫ 𝜔12 = ∫ 𝐾𝑔 𝑑𝑠𝛾𝛾
. (29)
De esta manera, (24) se reescribe de la siguiente manera:
∫ 𝜔12 = ∫ 𝐾𝑔 𝑑𝑠 + ∫ 𝐾𝑔 𝑑𝑠𝛽
− ∫ 𝐾𝑔 𝑑𝑠𝛾
−𝛼𝜗𝑥
∫ 𝐾𝑔 𝑑𝑠 − 2𝜋 + (휀1 + 휀2 + 휀3 + 휀4) =𝛿
= ∫ 𝐾𝑔 𝑑𝑠 − 2𝜋 +𝜗𝑥
(휀1 + 휀2 + 휀3 + 휀4) . (30)
Como un complemento, es posible sustituir esta última
expresión en (23).
∎
CONCLUSIONES
Pese a que las ideas expuestas anteriormente ya se habían
intentado explicar como es el caso de Thomas Harriot en
1603, en concordancia con la investigación de Stillwell,
éstas fueron tomando forma al paso de los años, hasta su
actual interpretación. Es así que se han descrito dos teoremas
de la Geometría Diferencial que son importantes en sí, pero
además han dado mucho sustento en la física teórica, como lo
es el concepto de geodésica, definido como la línea de menor
longitud entre dos puntos en el espacio-tiempo [4]. Además,
en el estudio del Análisis tensorial, la curvatura gaussiana
sustenta el estudio de las densidades tensoriales (Richards,
1959) aspecto interesante dentro de la física matemática; en
el estudio de las propiedades especiales de Holmes –
Thompson el tema estudiado en estas líneas también sustenta
algunas ideas de la Geometría de Minkowski [5].
REFERENCIAS
[1] [1] Stillwell, J. (2004). Mathematics and its History.
Springer – Verlag. N. Y.
[2] Iyanaga, S. (1977) Encyclopedic Dictionary of
Mathematics. The MIT Press. Cambridge, M. A.
[3] O’Neill, B. (1966). Elementary Differential Geometry.
Academic Press. N. Y.
[4] Richards, P. (1959). Manual of Mathematical Physics.
Pergamon Press. Belfast.
[5] Tribble, A. (1996). Princeton Guide to Advanced
Physics. Princeton University Press. N. J.
[6] Thompson, A.C. (1996). Minkowski Geometry.
Cambridge University Press. Cambridge. MA.
BIBLIOGRAFÍA COMPLEMENTARIA
Stillwell, J. (2004). Mathematics and its History. Springer –
Verlag. N. Y.
Четверухин, Н. Ф. (1961). Проективная Геометрия. Фиэико-
Математической. Литератуы. Москьа.
Doneddu, A. (1979). Análisis y Geometría Diferencial. Colección
Ciencia y Técnica Aguilar. Madrid.
Eddington, A. S. (1975). The Mathematical Theory of Relativity.
Chelsea Publishing Company. N. Y.
Engelsman, S. (1984). Families of Curves and the Origins of
partial Differentiation.
Mathematics Studies. North Holland Publishing. Amsterdam.
Eves, H. (1995). College Geometry. Jones and Bartlett Edition.

Journal Objetos y Objetivos Matemáticos No. 1; julio-diciembre 2019.
ISSN 2683-264X. https://joom.org.mx
© Autor(es) 2019. Artículo de acceso abierto bajo licencia CC BY-NC-ND 9
N.Y.
Фавар, ж. (1960). Курс Локальнои Дифференциальнои
Геометрии. Иностранной. Литератур. Мосва.
Hu, S. T. (1969). Differentiable Manifolds. Hart Rinehart Winston
Edition. N. Y.
Lefschetz, S. (1950). L’Analysis Situs et la Géométrie Algébrique.
Gauthier – Villars. Paris.
Matos, T. & Wiederhold, P. (2017). Principios matemáticos para
ciencias exactas. Colofón. Ediciones Académicas de Matemáticas. Instituto
Avanzado de Cosmología. México.
Preston, E. (1932). Projective Differential Geometry of Curves
and Surfaces. The University of Chicago Science Series. Chicago, IL.
Шуликоький, в. и. (1963). Классическая Дифференциальиая
Геометрия. Фиэико-Математической. Литератуы. Москьа.
Schouten, J. A. & Struik, D. J. (1935). Einführung in die Neueren
Mathoden der DifferentialGeometrie. P. Noordhoff Verlag. Amsterdam.
Stoker, J. J. (1969). Differential Geometry. Wiley Interscience.
N. Y.

Journal Objetos y Objetivos Matemáticos No. 1; julio-diciembre 2019.
ISSN 2683-264X. https://joom.org.mx
© Autor(es) 2019. Artículo de acceso abierto bajo licencia CC BY-NC-ND
10
Diseño y construcción de un manipulador
industrial de cinco grados de libertad:
Modelado matemático y análisis del
efector final.
Marcos Fajardo Rendón
Escuela Normal Superior de México, Manuel Salazar 201 Colonia Ex-hacienda del Rosario, Azcapotzalco,
02420 CDMX, México.
Resumen- El presente artículo describe los resultados obtenidos
al modelar matemáticamente, diseñar y manufacturar un prototipo de brazo robot del tipo manipulador vertical con cinco grados de libertad que permita la colocación de objetos en
coordenadas con un gripper como efector final. La tarea de tomar y colocar un objeto consiste en considerar la coordenada del efector final del robot y la coordenada de la posición deseada
en el espacio de trabajo. Se describe el diseño y modelo matemático de su cinemática directa; así como el análisis del movimiento de su efector final mediante la transformación del
espacio cartesiano al de las articulaciones respecto a sus eslabones utilizando el algoritmo de parametrización matricial Denavit-Hartenberg (D-H) para cinemática directa, su
validación y simulación en MATLAB para obtener las coordenadas del efector final. Posteriormente se describe el diseñó y manufactura en PVC del modelado utilizando
servomotores controlados por una tarjeta servocontroladora con GUI de diseño propio para experimentar y comparar los resultados del modelo matemático, y su simulación respecto al
prototipo físico. Palabras Clave- parametrización matricial, cinemática directa,
parametrización Denavit-Hartenberg, robótica, metodología de
manufactura. Abstract- This paper describes the results in the modelling,
design and build of a vertical manipulator robotic-arm prototype
with 5-degree of freedom designed to perform a pick and place task with its gripper; considering the end-effector coordinate of the robot and the desired position coordinate in its workspace.
This research describes a robot forward kinematics matemathical modeling and its gripper motion through a joint space analysis defined by the transformation from the cartesian
space respect the joint space. The Denavit-Hartenberg (D-H) forward kinematics matrix techique is used to model the manipulator’s links and joints to validate a design and simulate
in MATLAB to get the robot’s gripper coordinate. Based on the matemathical model the robotic arm was design and build using servomotors drived by a self design reprogramable USB-HID
servocontroller with a Window’s GUI to experiment and compare results of the physical prototype, matemathical model and simulation.
Keywords- matrix setting, forward kinematics, Denavit-Hartenberg setting, robotics, manufactury metodology.
Mathematical Subject Classification: 70Q05
I. INTRODUCCIÓN
Los manipluadores industriales son robots
antropomórficos articulados que desarrollan procesos de
manufactura programable mediante articulaciones formadas
por motoreductores servocontrolados que brindan un torque
conectados a eslabones logrando un movimiento de rotación o
de desplazamiento traslacional.
La palabra diseño proviene del latín designare que
significa “diseño o marcado”; por otro lado la ABET (2019)
define al diseño de ingeniería como:
Engineering design is the process of devising a system,
component, or process to meet desired needs. It is a
decision-making process (often iterative), in which the
basic sciences, mathematics, and the engineering sciences
are applied to convert resources optimally to meet these
stated needs [1].
Con base a lo anterior el presente estudio se centra en el
diseño y modelado de un robot formado por una cadena
cinemática de articulaciones más un efector final que colocará
un objeto de una posición inicial a una final, su manufactura,
construcción del prototipo físico articulado con servomotores
y la realización de pruebas de control.
II. TEORÍA DE MATRICES
Las técnicas de modelado matemático mediante matrices
surge desde la necesidad de querer representar fenómenos
físicos en representaciones numéricas y se remontan a antes
del siglo II A.C.[2], en un tratado hecho en China de la dinastía
Han que data del 200 A.C llamado arte matemático el que
describe métodos sobre matrices en un problema de
combinatoria de granos resolviéndolo sobre un tablero
divisible que permite encontrar la solución para un 3er tipo de
grano, después para el 2º y después para el 1ero mediante su
sustitución recursiva en reversa; este método se conoce
occidental y modernamente como eliminación Gaussiana y
data del siglo XIX.
Autores como Cardano en in Ars Magna (1545) [3] indicó
reglas para resolver un sistema de dos ecuaciones lineales
denominado regula de modo [4] y que llama a su vez madre
de reglas, la cual sirve de base para la regla de Cramer de 2x2
dando un acercamiento a la noción determinante. En el libro
Elementos de curvas (Jan De Witt, 1660) [5] se encuentra un
extenso agregado en la versión en latín de La Géométrie
(Descartes,1637) que describe que la transformación de los

Journal Objetos y Objetivos Matemáticos No. 1; julio-diciembre 2019.
ISSN 2683-264X. https://joom.org.mx
© Autor(es) 2019. Artículo de acceso abierto bajo licencia CC BY-NC-ND
11
ejes se reduce a una ecuación dada para una cónica a su forma
canónica sin la diagonalización matricial actual.
El concepto de resolución general de determinante data de
1683 en Japón con el tratado 隱 題之法 (Kaiindai no hō:
Método de solución de problemas ocultos) de Takakazu
Shinsuke Seki [6] el cual también descubrió los números
Bernoulli antes que el mismo Jacob Bernoulli diez años
después en una carta de Leibniz a L'Hópital se describe un
sistema de ecuaciones sin la generalización de su contraparte
oriental.
Leibniz [2] utilizó el término “resultante” para la
combinatorias de sumas de términos de una determinante
probando lo que es en esencia la regla de Cramer.
En 1730's Maclaurin escribe Treatise of algebra [7]
(publicado hasta 1749) con la prueba por determinantes de la
regla de Cramer de sistemas 2x2 y 3x3 y la descripción para
4x4.
En el paper Introduction to the analysis of algebraic curves
(1750) Cramer [8] describe la regla general para sistemas n ×
n.
En 1764 Bezout describe metodología para determinantes,
continuado por Vandermonde en 1771; en 1772 Laplace
discute la solución de sistemas de ecuaciones lineales por
determinantes y acuñe el término [2].
En 1773 Lagrange [9] publica un trabajo de mecánica en
donde se da la interpretación de un determinante.
Gauss usa el término determinante [10] en Disquisitiones
arithmeticae (1801) [11] ya que determina las propiedades de
la ecuación cuadrática describiendo el producto y la matriz
inversa (1812) [12] desde los arreglos de coeficientes de
formas cuadradas; en 1826 Cauchy [13] respecto a las formas
cuadráticas en n variables utiliza el término tableau como
matriz de coeficientes, diagonalización.
Kronecker [14] en 1850 y Weierstrass en 1860 trabajaron
en el campo de transformación lineal de matrices;
posteriormente Jacobi en 1841 algoritmizó las determinantes.
Cauchy en 1858 [2] publica Memorias sobre teorías de
matrices con la primera definición abstracta de matriz y
describe la propiedad aditiva, producto, producto escalar,
e inversas y probó que una matriz satisface su propia
ecuación característica en 2 × 2 y 3 × 3 pero es el teorema
Cayley – Hamilton el que prueba 4x4 como cuaterniones.
Se define una matriz ℳ de cuerpo 𝕂 como un arreglo
rectangular de 𝑚 filas y 𝑛 columnas como:
ℳ𝑚.𝑛(𝕂) = {𝑎𝑖𝑗} |
𝑎𝑖𝑗 , 𝑚, 𝑛 ∈ ℝ ; 𝑖 = { 1 … 𝑚}; 𝑗 = {1, … , 𝑛}; (1)
Considerando el sistema como un dominio D ∈ ℤ con 𝑚
ecuaciones lineales y 𝑛 indeterminadas {𝑥1…𝑥𝑛} cuyos
coefientes en D es una ecuación [8]:
𝑎1𝑥1 + ⋯ + 𝑎𝑛𝑥𝑛 = 𝑏|𝑎𝑖 ; 𝑏 ∈ 𝐷; 𝑖 = {1. . . 𝑛} (2)
Análogamente:
𝑎𝑖𝑗 , 𝑏𝑖 , 𝑚, 𝑛 ∈ ℝ | ∀𝑖 = { 1 … 𝑚}; 𝑗 = { 1 … 𝑛} (3)
Considerando 𝑏𝑖 … 𝑏𝑚 como términos independientes del
arreglo su arreglo se describe como:
[
𝑎11𝑥1+ … +𝑎1𝑛𝑥𝑛
𝑎21𝑥1+ … +𝑎2𝑛𝑥𝑛
⋮ ⋮⋮⋮ ⋮𝑎𝑚1𝑥1+ … +𝑎𝑚𝑛𝑥𝑛
]
= 𝑏1
(4) = 𝑏2
⋮
= 𝑏𝑚
El sistema (4) puede ser solucionado mediante un elemento
𝑠 descrito como:
(𝑠1 … 𝑠𝑛) ∈ ℝ𝑛 = ℝ1 × … × ℝ𝑛 | ∀𝑖 = { 1 … 𝑚} →
𝑎𝑖1𝑠1 + ⋯ + 𝑎𝑖𝑛𝑠𝑛 = 𝑏𝑖 (5)
Se denomina a (4) matriz de coeficientes 𝑚 × (𝑛 + 1) ∈ℝ del sistema de ecuaciones descrito en (2) y (3) determinado
por los coeficientes de las indeterminadas y los términos
independientes [8].
Así mismo:
ℳ1𝑚.𝑛(𝕂) = ℳ2𝑚.𝑛(𝕂) ⇔
[((𝑚, 𝑛) ∈ ℳ1 ⋀ ℳ2 ) ⋀ (ℳ1, ℳ2 ∈ 𝕂)] (6)
ℳ1𝑚.𝑛(𝕂) + ℳ2𝑚.𝑛(𝕂) | ℳ1={𝑎𝑖𝑗} , ℳ2={𝑏𝑖𝑗} =
ℳ3𝑚.𝑛(𝕂)={𝑐𝑖𝑗}; 𝑐𝑖𝑗 = 𝑎𝑖𝑗 + 𝑏𝑖𝑗; ∴ ℳ1 + ℳ2 = ℳ3 (7)
[ℳ1𝑚.𝑙 = {𝑎𝑖𝑗} ] [ ℳ2𝑙.𝑛 = {𝑏𝑖𝑗}] = ℳ3𝑚.𝑛 = {𝑐𝑖𝑗} =
∑ 𝑎𝑖𝑘𝑏𝑘𝑗𝑙𝑘=1 ∴ ℳ1. ℳ2 = ℳ3 (8)
(ℳ1)(𝛼) |(𝛼 ∈ ℝ𝑖; ℳ2=𝛼ℳ1 = 𝑐𝑖𝑗
∴ ℳ1(𝛼) = 𝛼. 𝑎𝑖𝑗 (9)
Cumpliéndose la propiedad asociativa:
(ℳ1+ ℳ2)+ ℳ3= ℳ1+( ℳ2+ ℳ3) debido a:
({𝑎𝑖𝑗}+{𝑏𝑖𝑗}) + {𝑐𝑖𝑗}={𝑎𝑖𝑗}+({𝑏𝑖𝑗}+{𝑐𝑖𝑗}) y que
{𝑎𝑖𝑗},{𝑏𝑖𝑗}, {𝑐𝑖𝑗}∈ 𝕂 (10)
Conmutativa:
ℳ1 + ℳ2 = ℳ2 + ℳ1 debido a:
{𝑎𝑖𝑗}+{𝑏𝑖𝑗} ={𝑎𝑖𝑗}+({𝑏𝑖𝑗} siendo:
{𝑎𝑖𝑗},{𝑏𝑖𝑗}, {𝑐𝑖𝑗}∈ 𝕂 (11)
Así mismo:
ℳ1 (ℳ2+ ℳ3)= ℳ1ℳ2+ ℳ1ℳ3 (12)

Journal Objetos y Objetivos Matemáticos No. 1; julio-diciembre 2019.
ISSN 2683-264X. https://joom.org.mx
© Autor(es) 2019. Artículo de acceso abierto bajo licencia CC BY-NC-ND
12
(ℳ2 + ℳ3)ℳ4 = ℳ2ℳ4 + ℳ3ℳ4 (13)
ℳ1(ℳ2ℳ3) = (ℳ1ℳ2)ℳ3 (14)
Siendo que ℳ1. ℳ2 ≠ ℳ2. ℳ1. Cuando ℳ1. ℳ2= ℳ2. ℳ1se describe una conmutación
matricial [8].
Para la matriz asociada a una transformación lineal se debe
establecer que éstas son algunas funciones que se encuentran
dentro de espacios vectoriales -asociados en mecánica a los
ejes de coordenadas donde se desplazan los dispositivos-que
permiten obtener una descripción respecto a los sistemas de
ecuaciones lineales.
Un espacio vectorial queda descrito como ℝ𝑛 ⋀ ℂ𝑛| 𝑛 ∈ℝ ⋀ 𝑛 ∈∪ ℂ; ℝ: 𝑒𝑠𝑝𝑎𝑐𝑖𝑜 𝑒𝑢𝑐𝑙𝑖𝑑𝑒𝑜; ℂ: 𝑒𝑠𝑝𝑎𝑐𝑖𝑜 𝑢𝑛𝑖𝑡𝑎𝑟𝑖𝑜 ⇒
∀�⃗� ∈ ℝ𝑛| {𝑥𝑖}𝑛
𝑖=1 ; su magnitud se describe por:
|�⃗�|=√|𝑥1|2 + |𝑥2|2 + ⋯ + |𝑥𝑛|2 (15)
Mientras que su sentido �⃗� = (𝑥1, 𝑥2, , … , 𝑥𝑛)⋀ �⃗� =(𝑦1, 𝑦2, , … , 𝑦𝑛) ∈ ℝ𝑛 ⋁ ℂ𝑛 ; por lo que se pueden realizar las
operaciones vectoriales por números 𝛼 ∈ ℝ𝑛 ⋁ 𝛽 ∈ ℂ𝑛:
𝛼�⃗� + 𝛽�⃗� = (𝛼𝑥1 + 𝛽𝑦1, 𝛼𝑥2 + 𝛽𝑦2, … , 𝛼𝑥𝑛 + 𝛽𝑦𝑛) (16)
Con sus propiedades:
�⃗� + �⃗� = �⃗� + �⃗�; (17)
�⃗� + (�⃗� + 𝑧) = (�⃗� + �⃗�) + 𝑧; (18)
𝛼(�⃗� + �⃗�) = 𝛼�⃗� + 𝛼�⃗�,(𝛼 + 𝛽) �⃗� = 𝛼�⃗� + 𝛽�⃗� (19)
La relación �⃗� ⊥ �⃗� ⟺ (�⃗�, �⃗�) = 0 ; siendo en el espacio
vectorial:
ℝ𝑛 ⊥ ℂ𝑛 ⇒ (�⃗� + �⃗�) ≡ |�⃗�||�⃗�|𝑐𝑜𝑠𝜃 = 0 (20)
La transformación lineal [14] se describe con los
componentes espacios vectoriales 𝑉, 𝑊 ∈ ℝ ; así mismo la
función 𝑇: 𝑉 ⟶ 𝑊.
Es una transformación lineal:
𝑇 ⟷ (∀�̅�, 𝑠´ ̅) ∈ 𝑉⋀ 𝛼 ∈ ℝ (21)
Con las propiedades de las funciones que describen como
se componen los espacios vectoriales [14]:
𝑇(�̅� + 𝑠´ ̅) = 𝑇(�̅�) + 𝑇(𝑠´ ̅) (22)
𝑇(𝛼 ⋅ �̅�) = 𝑇 ⋅ 𝛼(�̅�) (23)
Mecánicamente se pueden representar un conjunto de
escalares 𝑎𝑖𝑗… 𝑎𝑖𝑗 con comportamiento cinemático de
acuerdo a lo discutido en (1)-(20) a estos se les puede obtener
una descripción 𝑇(21) a través de una matriz ℳ asociada a 𝑇
manteniendo una base canónica de a 𝕂𝑛 𝑦 𝕂𝑚 denotada por la
matriz de transformación ℳ(𝑇) [14].
ℳ(𝑇) = [
𝑎11 𝑎12 … 𝑎𝑛
𝑎21 𝑎22 … 𝑎2𝑛
⋮ ⋮ ⋮⋮⋮ ⋮𝑎𝑚1 𝑎𝑚2 … 𝑎𝑚𝑛
]
∈ ℳ𝑚.𝑛(𝕂) (24)
La matriz asociada ℳ(𝑇) a la identidad en 𝕂𝑛 es la matriz
de identidad ℳ𝑚.𝑛(𝕂). Se especifica 𝕂 como ℝ para las
descripciones mecánicas siguientes.
III. METODOLOGÍA
Las técnicas de modelado y diseño asistido por
computadora (CAD) y manufactura asistida por computadora
(CAM) permiten experimentar y llevar los modelos a sus
límites [15]. El modelado y virtualización previo a la
construcción física utilizando las técnicas de prototipado
permiten comprobar el diseño mediante una simulación del
comportamiento antes de su construcción física; evitando
tener que invertir recursos de manufactura en un producto que
podría fallar [16].
La metodología es aquella que describe al algoritmo de
desarrollo del diseño de maquinaria Bonsiepe [17]; la
seleccionada para el diseño fue la de Robert Norton [18], la
cual describe que la misma es un proceso iterativo que
contiene aspectos desde el diseño hasta la manufactura en 10
pasos; debiendo retornar a un paso anterior si llegara a fallar
el actual ordenándolas en:
Identificación, Investigación preliminar, Planteamiento de
objetivos, Especificaciones de desempeño, Ideación e
invención, Análisis, Selección, Diseño detallado, Creación
de prototipos-pruebas y Producción [18].
La metodología de manufactura descrita fue propuesta
para obtener un prototipo funcional capaz de manipular un
objeto seleccionando de una posición inicial a una final
mediante el algoritmo anteriormente descrito descartando la
producción, al ser una investigación académica sin fines de
lucro; sin descartar la posibilidad de ser llevado a la
manufactura de fabricación en serie.
IV. DESCRIPCIÓN DEL ROBOT
1.-Identificación de la necesidad: Debido a que diversos
procesos industriales implican el desplazamiento de un objeto
de una posición inicial a una final; así como el estudio del
modelado matemático de su solución se propone el diseño,
modelo matemático, manufactura y control de un manipulador
industrial que reposicione un objeto. El objeto seleccionado
será un dulce de 0.148 oz [19] de dimensiones 𝑥 ⋅ 𝑦 y se
utilizará una matriz sobrepuesta segmentada en milímetros
para comprobar las posiciones obtenidas. 2.-Investigación
preliminar: De acuerdo al vocabulario de la norma ISO 8373
[20] un manipulador industrial es:
machine in which the mechanism usually consists of a
series of segments, jointed or sliding relative to one
another, for the purpose of grasping and/or moving objects

Journal Objetos y Objetivos Matemáticos No. 1; julio-diciembre 2019.
ISSN 2683-264X. https://joom.org.mx
© Autor(es) 2019. Artículo de acceso abierto bajo licencia CC BY-NC-ND
13
(pieces or tools) usually in several degrees of freedom
(p.1).
Al conjunto de articulaciones de un robot se denominan
cadena cinemática [21]; siendo la última de ellas el efector
final el cual es una “herramienta” pudiendo ser intercambiable
en la mayoría de los manipuladores industriales por grippers
(pinzas para atrapar objetos), estaciones de soldadura,
cortadoras, suministradores y otros [20].
El modelado matemático de la cinemática del robot
consistirá en el estudio de su movimiento descartando las
fuerzas que lo causan.
La cinemática directa describe y determina la posición
cartesiana y orientación de una cadena de coordenadas
relacionadas y será la utilizada en el modelado del prototipo
MATHBOT.
La cinemática inversa consiste en determinar las variables
conjuntas respecto a una posición y orientación del efector
final del robot.
El un diseño y modelado matemático mecánico se vuelve
complejo respecto al número de GDL (grados de libertad) y
mecanismos de efecto múltiple como son los desplazamientos
espaciales y el número de efectores vinculados.
3.-Planteamiento de objetivos: Se propuso realizar el
análisis del problema de reposicionamiento de un objeto y las
características del objeto, modelar matemáticamente el
manipulador industrial, simular el modelo matemático del
manipulador.
Con base a lo anterior hacer un diseño CAD de la
estructura y ensamble del prototipo modelad, seleccionar los
servomotores y material adecuados.
Por último, manufacturar el prototipo, experimentar con el
prototipo y comprobar que el prototipo se adecua al modelo.
4.-Especificaciones de desempeño: El manipulador
industrial deberá posicionar un objeto de 0.148 oz [19] y
medidas 30 mm por 20 mm de una posición inicial a una final
pudiendo girar y rotar el objeto; no se abordará en la fuerza y
velocidad debido a que para fines del artículo interesa sólo el
modelado de la cinemática directa.
Se trabajará con el desempeño de la cadena cinemática
directa de un robot de 5-GDL con servomotores controlados a
construir; el modelado se realizará matemáticamente y se
comprobará mediante una simulación en MATLAB
procediendo con la metodología.
5.-Ideación e invención: Se propone el diseño de un
manipulador industrial vertical denominado MATHBOT que
debe ser conceptualizado como una cadena cinemática con 5
articulaciones o 6 si se considera al gripper como actuador
final como se describe en la figura 1, en donde se pueden
identificar las articulaciones y eslabones del manipulador
industrial.
Los movimientos posibles de las articulaciones se
describen en la figura 1 y tabla 1.
Para establecer los parámetros Denavit-Hartenberg [21]
modelados en la figura 2 se asignarán valores de
parametrización para el diseño descartando la articulación 4
“pitch” debido a que se mantendrá recta en el
posicionamiento.
Se describe a 𝜃como el desplazamiento respecto al eje Y,
𝛼 respecto a X; a describe el desplazamiento respecto al centro
de la base que sostiene al manipulador y D el desplazamiento
de la articulación anterior.
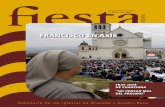
Fig. 1. Partes de un manipulador industrial.
Tabla 1. Movimientos del manipulador industrial
Eje Nombre Movimiento.
1 Base Gira el cuerpo.
2 Hombro Levanta y Baja el brazo inferior.
3 Codo Levanta y Baja el brazo Superior.
4 Muñeca (Pitch) Levanta y baja el Efector Final (Gripper).
5 Muñeca (Roll) Rota el Efector Final (Gripper).
Para obtener la solución cinemática se modela cada unión
comenzando con la base hasta el efector final asignando
literales como se describe en la figura 2.
Fig. 2 Asignación de cada unión del robot descartando L4(Pitch).

Journal Objetos y Objetivos Matemáticos No. 1; julio-diciembre 2019.
ISSN 2683-264X. https://joom.org.mx
© Autor(es) 2019. Artículo de acceso abierto bajo licencia CC BY-NC-ND
14
Por lo anterior respecto a la 𝜃 en la articulación base al
girar sobre Z que descansa.
Se utiliza L para describir el eslabón de trabajo y A para el
adelantamiento o desplazamiento respecto a un eje.
La figura 3 describe los parámetros y distancias a las que
se encuentran los eslabones.
Fig. 3 Esquema de acuerdo con los valores establecidos por la
parametrización Denavit-Hartenberg.
V. MODELADO MATEMÁTICO DEL ROBOT MEDIANTE
METODOLOGÍA DENAVIT-HARTENBERG.
Continuando con la metodología descrita anteriormente se
procede a realizar el paso siguiente:
6.-Análisis de las variables a considerar: Para estudiar el
problema cinemático se utilizará el algoritmo Denavit-
Hartenberg [21] que es utilizado para modelar las
articulaciones y eslabones de los robots.
Para analizar el movimiento del robot MATHBOT se
utilizará la cinemática directa para determinar la posición y
orientación del gripper mediante el conocimiento de los
valores dados para la variación de las articulaciones dadas en
el diseño de la figura 3.
La representación D-H [21] anterior dependerá de cuatro
parámetros de eslabones válidos:
• ai (Longitud del eslabón) = La distancia desde Zi-1 a Zi
medido desde Xi.
• αi (eslabón de giro de cadera) = El ángulo desde Zi-1 a Zi
medido desde Xi.
• di (Distancia articular) = La distancia desde Xi-1 hasta Xi
medido desde Zi-1.
• θi (Joint angle) = El ángulo desde Xi-1 a Xi medido
desde Zi-1.
La matriz de transformación homogénea [14] de 4x4 es
utilizada para determinar la cinemática directa. Puede ser
desarrollada de acuerdo al {i-1} ∧ {i}.
A continuación, se asignan los valores de parametrización
para su diseño de la matriz:
Eslabón 𝜃 D A 𝛼
L {1} q1 10.5 0 𝜋
2
L {2} q2 0 11.5 0
L {3} q3 0 7 0 (25)
L {4} 0 0 0 𝜋
2
L {5} q5 4 0 0
Siendo correspondiente a una longitud máxima de 33 cm
sin tomar en cuenta el actuador final (gripper abierto), queda
el desplazamiento mediante:
0.-El origen es la coordenada (0,0,0) que es el piso sobre
el que descansa el primer servomotor.
1.-El primer eslabón a considerar será el hombro
denominado L {1}; tomando en cuenta el origen O hasta la
unión con el primer eslabón, se encuentra adelantado en las
ordenadas en D=10.5cm en donde se colocará el primer
servomotor con un A=0 y 𝛼 de 𝜋
2.
2.-La base de la estructura L {2} donde descansa el codo y
se encuentra sin rotación y adelantado respecto al eje de las
ordenadas del piso en A=11.5 cm.
3.- L {3} es el eslabón del codo al pitch y se encuentra
desplazado en las ordenadas respecto a codo en A=7cm sin
rotación.
4.- L {4} es el eslabón del pitch al gripper de la muñeca y
sólo se tomará el 𝛼 de 𝜋
2 al estar unido al brazo superior por lo
que se descarta q4.
5.- L {5} es el eslabón del roll de la muñeca junto con el
servomotor del gripper hasta el comienzo de la pinza (palma)
y se encuentra desplazado en las abscisas respecto a codo en
D=4cm.
La altura máxima a considerar como mecanismo en la
posición de la figura 3 será entonces de 33 cm del piso al
origen del gripper abierto, pudiendo legar con gripper cerrado
a 39 cm.
Continuando con la metodología anterior se diseñó la
siguiente descripción matemática que consiste en cuatro
transformaciones básicas [14]:
𝑖 − 1𝑇 = [
𝐶𝜃𝑖 −𝑆𝜃𝑖𝐶 ∝𝑖 𝑆𝜃𝑖𝑆 ∝𝑖 𝑎𝑖𝐶𝜃𝑖
𝑆𝜃𝑖 𝐶𝜃𝑖 −𝐶𝜃𝑖𝑆𝛼𝑖 𝑎𝑖𝑆𝜃𝑖
0 𝑆𝛼𝑖 𝐶𝛼𝑖 𝑑𝑖
0 0 0 1
] (26)
En donde 𝑆𝜃𝑖= sin𝜃𝑖 , 𝐶𝜃𝑖 = 𝑐𝑜𝑠𝜃𝑖 , 𝑆𝛼𝑖 = sin𝛼𝑖 , C𝛼𝑖 =
cos𝛼𝑖 . Posteriormentese sustituyen los parámetros D-H de
la tabla 1 en (25) y (26); la matriz de transmisión de cada
eslabón es como sigue [21]:
0T1= [
𝐶1 0 𝑆1 𝑎𝐶1
𝑆1 0 −𝐶1 𝑎𝑆1
0 1 𝐶𝛼𝑖 𝐿1
0 0 0 1
] (27)

Journal Objetos y Objetivos Matemáticos No. 1; julio-diciembre 2019.
ISSN 2683-264X. https://joom.org.mx
© Autor(es) 2019. Artículo de acceso abierto bajo licencia CC BY-NC-ND
15
1T2= [
𝐶2 −𝑆2 0 𝐿2𝐶2
𝑆1 𝐶2 −𝐶2 𝐿2𝑆2
0 0 1 00 0 0 1
] (28)
2T3= [
𝐶3 −𝑆3 0 𝐿3𝐶3
𝑆3 𝐶3 0 𝐿3𝑆3
0 0 1 00 0 0 1
] (29)
3T5= [
𝐶4 0 𝑆4 0𝑆4 0 −𝐶4 00 1 0 00 0 0 1
] (30)
4T5= [
𝐶5 −𝑆5 0 0𝑆1 𝐶5 0 00 0 1 𝐿5
0 0 0 1
] (31)
Para determinar la matriz de transformación del efector
final Te; donde Te =T50.
El producto de las matrices (27) a (31) permite obtener la
matriz:
0T5= 0T1*1T2*2T3*3T4*4T5 (32)
0T5= [
𝐾1 𝐾4 𝐾7 𝑃𝑋
𝐾2 𝐾5 𝐾8 𝑃𝑌
𝐾3 𝐾6 𝐾9 𝑃𝑍
0 0 0 1
] (33)
Donde:
𝐾1= 𝐶1𝐶5𝐶2∗3∗4 + 𝑆1𝑆5
𝐾2= −𝐶1𝑆5+ 𝑆1𝐶2∗3∗4𝐶5
𝐾3= 𝐶5𝑆2∗3∗4
𝐾4= 𝑆1𝐶5+𝐶1𝐶2∗3∗4𝑆5
𝐾5= −𝐶1𝐶5 − 𝑆1𝐶2∗3∗4𝑆5
𝐾6= −𝑆2∗3∗4𝑆5
𝐾7= 𝐶1𝑆2∗3∗4
𝐾8= 𝑆1𝑆2∗3∗4
𝐾8= −𝐶2∗3∗4
Pudiendo obtener el valor del efector final coordenado en
el espacio cartesiano de MATHBOT como:
[
𝑝𝑥𝑝𝑦𝑝𝑧
] [
𝐶1(𝑎 + 𝐿3𝐶2∗3 + 𝐿5𝐶2∗3∗4 + 𝐿2𝐶2)
𝑆1(𝑎 + 𝐿3𝑆2∗3 + 𝐿5𝐶2∗3∗4 + 𝐿2𝐶2)𝐿1 + 𝐿3𝑆2∗3 − 𝐿5𝐶2∗3∗4 + 𝐿2𝑆2
] (34)
Así mismo:
Sx = sinθx, Cx = cosθx, Sxy = sin(θx+ θz)
Cxy =cos(θx+ θy)
Sxyz = sin(θx+ θy+ θz).
Cxyz = cos(θx+ θy+ θz).
Sustituyendo los valores y realizando el producto matricial
equivalente a la transformación D-H [21] se obtiene:
[
0 −0 1 01 0 −0 10 1 0 10 0 0 1
] (35)
Sustituyendo los valores en la transformación Denavit
Hartenberg se obtiene de igual forma la misma que en (35):
[
0 −0 1 01 0 −0 10 1 0 10 0 0 1
] (36)
Con el modelo matemático anteriormente descrito se
pueden indicar ángulos para la cinemática directa como el de
una posición de arranque en donde todos los servomotores sean
energizados en forma de cadena lineal vertical serían la
configuración [θ1 θ2 θ3 θ4 θ5] como:
[ 0 𝜋
2 0
𝜋
2 0 ] (37)
El ángulo y posición del efector final (𝐸) utilizando el
modelo matemático (33) y descartando el efector final θ5
quedaría como:
[𝐸𝑥 0𝐸𝑦 0𝐸𝑧 33
] (38)
Por otro lado, una posición desenergizada de los
servomotores marcará lo contrario; es decir una configuración
[θ1 θ2 θ3 θ4 θ5] como:

Journal Objetos y Objetivos Matemáticos No. 1; julio-diciembre 2019.
ISSN 2683-264X. https://joom.org.mx
© Autor(es) 2019. Artículo de acceso abierto bajo licencia CC BY-NC-ND
16
[ 0 𝜋
2 − 3
𝜋
4
𝜋
4 0 ] (39)
La posición del efector (𝐸) queda susutituyendo (39)
descartando el efector final θ5 en (33) como:
[𝐸𝑥 4.95𝐸𝑦 0𝐸𝑧 13.05
] (40)
Para poder tomar un objeto la posición del gripper con el
robot queda dada por una configuración [θ1 θ2 θ3 θ4 θ5] de:
[ 0 𝜋
2 −3
𝜋
4 3
𝜋
4 0 ] (41)
(𝐸) toma la posición al susutituir (41) en (33) descartando
el efector final θ5 como:
[𝐸𝑥 8.95𝐸𝑦 0𝐸𝑧 17.05
] (42)
Una vez tomado el objeto se girará sobre la base en la
misma posición para dejar el objeto siendo la configuración
angular [θ1 θ2 θ3 θ4 θ5] dada por:
[ 𝜋 𝜋
2 −3
𝜋
4 3
𝜋
4 0 ] (43)
El efector final (𝐸) susutituyendo (43) en (33) descartando
el efector final θ5 coloca el objeto final mediante:
[𝐸𝑥 − 8.95𝐸𝑦 0
𝐸𝑧 17.05
] (44)
7.-Selección: Con base a los valores descritos en el diseño
y modelado matemático se diseñará un brazo robot de 5
eslabones, un gripper y seis GDL utilizando servomotores que
puedan ocupar los espacios entre los eslabones manteniendo
los tamaños.
De acuerdo al esquema de la figura 3 se seleccionó para el
ensamble del diseño a manufacturar tres servomotoreductores
Hitec HS-311, un DYNAMIXEL AX para la base y dos
Servomotor Micro HD-1900A para el gripper debido a sus
características y tamaño [22].
VI. CAD
De acuerdo al diseño de la figura 3 y al modelado
matemático se procedió a realizar su simulación utilizando los
parámetros Denavit-Hartenberg descritos anteriormente.
8.-Diseño detallado CAD: Siendo correspondiente el
desplazamiento de acuerdo al modelado matemático y el
diseño de la figura 3, se diseñó mediante AutoCAD los
eslabones tomando en cuenta los servomotores anteriormente
descritos utilizando los siguientes parámetros:
El origen (piso) como coordenada (0,0,0); el hombro L {1}
con D=10.5cm con rotado en 𝜋
2 para 𝛼; la base L {2}
adelantado a las abscisas en A=4 cm. como se describe en la
figura 4.
El eslabón del codo L {3} está desplazado a las ordenadas
hombro en A=7 cm como se describe en la figura 5.
Fig. 4. Descripción de L {1} y L {2}
El eslabón final hacia la muñeca encuentra dividida en el
eslabón de pitch de la muñeca L {4} descartado para
parametrización con una rotación en 𝛼 en 𝜋
2 pero es
considerado en su simulación gráfica.
Fig. 5. L {3}
Se considera a continuación para el movimiento de la
muñeca el roll L {5} desde el codo hasta el origen del actuador
final desplazado en las abscisas respecto al codo en A=4cm
obteniendo el mecanismo con este último eslabón una altura
máxima de 33 cm en posición de gripper abierto para tomar
objetos y pudiendo alcanzar un tamaño máximo de 39 cm con
el gripper cerrado; como se describe en la figura 6.

Journal Objetos y Objetivos Matemáticos No. 1; julio-diciembre 2019.
ISSN 2683-264X. https://joom.org.mx
© Autor(es) 2019. Artículo de acceso abierto bajo licencia CC BY-NC-ND
17
Fig. 6. L {5}
VII. SIMULACIÓN
El diseño CAD y modelado de la cinemática directa del
robot MATHBOT fue comprobado mediante una simulación
utilizando el lenguaje MATLAB para examinar la eficiencia
del modelo matemático descrito en la matriz 0T5 (33) con los
parámetros descritos comparando los resultados respecto a la
simulación.
Dado el conjunto de ángulos con entrada para el desarrollo
de la cinemática directa 0T5 (33) y MATLAB los resultados
correspondientes al modelado matemático han sido
comparados y graficados.
Al ejecutar la simulación se programaron los siguientes
resultados de Denavit-Hartenberg (D-H) [21]de acuerdo a
(25):
Rob = noname: 5 axis, RRRRR, stdDH, slowRNE +---+-----------+-----------+-----------+-----------+-----------+
| j | theta | d | a | alpha | offset |
+---+-----------+-----------+-----------+-----------+-----------+
| 1| q1| 10.5| 0| 1.5708| 0|
| 2| q2| 0| 11.5| 0| 0|
| 3| q3| 0| 7| 0| 0|
| 4| q4| 0| 0| 1.5708| 0|
| 5| q5| 4| 0| 0| 0|
+---+-----------+-----------+-----------+-----------+-----------+
Los comandos anteriores describen en la columna j que el
manipulador tiene 5 grados de libertad; así como sus
respectivos parámetros configurados de 𝜃, d, a y 𝛼 con sus
respectivos valores de 𝜋
2 en decimal y las L1 a L5.
Al realizar el producto matricial en la simulación se
obtiene con los comandos:
PRODUCTOMATRICIAL=R_tetha*D_d*D_a*R_alph
Coincidiendo con los valores obtenidos en la matriz (36):
0.0000 -0.0000 1.0000 0.0000 1.0000 0.0000 -0.0000 1.0000 0 1.0000 0.0000 1.0000 0 0 0 1.0000
De forma similar mediante la transformación Denavit
Hartenberg:
DENAVITHARTENBERG=[cos(teta) -cos(alpha)*sin(teta) sin(alpha)*sin(teta) a*cos(teta); sin(teta) cos(alpha)*cos(teta) -sin(alpha)*cos(teta) a*sin(teta); 0 sin(alpha) cos(alpha) d; 0 0 0 1]
Se obtiene el mismo resultado que en (37):
0.0000 -0.0000 1.0000 0.0000 1.0000 0.0000 -0.0000 1.0000 0 1.0000 0.0000 1.0000 0 0 0 1.0000
Para la simulación de las posiciones la configuración inicial
de cadena vertical se programó el ángulo-articulación [θ1 θ2
θ3 θ4 θ5] por q1 a q5 de acuerdo a (37):
q1=0; q2=pi/2; q3=0; q4=pi/2; q5=0; %Valores pos1=[q1 ,q2, q3, q4, q5]%MATRIZ Rob.plot (pos1)%PLOTEO 1 Rob.fkine(pos1) %Generación de MTD
Con lo que obtuvo la transformación directa coincidiendo
con los valores de (38):
pos1= 0 1.5708 0 1.5708 0 ans =
-1 0 0 0 0 -1 0 0 0 0 1 33 0 0 0 1
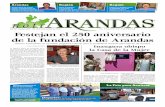
En la figura 7 se describe la simulación de la posición
obtenida mediante la MTD (38).
Fig. 7. Posición de inicio con todos los servos energizados de acuerdo a
la MTD (14).

Journal Objetos y Objetivos Matemáticos No. 1; julio-diciembre 2019.
ISSN 2683-264X. https://joom.org.mx
© Autor(es) 2019. Artículo de acceso abierto bajo licencia CC BY-NC-ND
18
Para la programación de la posición desenergizada de los
servomotores da configuración [θ1 θ2 θ3 θ4 θ5] viene dada por
(39) con:
q1=0;q2=pi/2;q3=-3*pi/4;q4=pi/4;q5=0; %Valores pos2=[q1 ,q2, q3, q4, q5]%MATRIZ Rob.plot (pos2) %PLOTEO Rob.fkine(pos2) %Generación de MTD
Obteniendo su MTD que coincidie con (40):
pos2 = 0 1.5708 -2.3562 0.7854 0 ans = 1 0 0 4.95 0 -1 0 0 0 0 -1 13.05 0 0 0 1
Su ploteo en modo de “reposo” se describe en la figura 8.
Fig. 8 Simulación de la posición de reposo de acuerdo a la MTD (40).
La posición para tomar un objeto tiene la configuración [θ1
θ2 θ3 θ4 θ5] queda dada por (41) con el programa:
q1=0;q2=pi/2;q3=-3*pi/4;q4=3*pi/4;q5=0; %valores pos3=[q1 ,q2, q3, q4, q5]%MATRIZ Rob.plot (pos3) %PLOTEO Rob.fkine(pos3) %Generación de MTD
El resultado del efector final (𝐸) coincide con la MTD (42):
pos3=0 1.5708 -2.3562 2.3562 0 ans = 0 0 1 8.95 0 -1 0 0 1 0 0 17.05 0 0 0 1
La simulación se describe en la figura 9 en donde se
descartan los comandos del actuador final:
Fig 9. Posición de toma del objeto de acuerdo a la MTD (42).
Para la programación de la posición final para colocar el
objeto en su posición final tiene la configuración angular [θ1
θ2 θ3 θ4 θ5] descrita en (43):
q1=pi;q2=pi/2;q3=-3*pi/4;q4=3*pi/4;q5=0;%valores pos4=[q1 ,q2, q3, q4, q5]%MATRIZ Rob.plot (pos4) %PLOTEO Rob.fkine(pos4) %Generación de MTD
Susutituyendo se obtiene el mismo resultado que en (44)
por Matlab:
pos4=3.1416 1.5708 -2.3562 2.3562 0 ans = 0 0 -1 -8.95 0 1 0 0 1 0 0 17.05 0 0 0 1
El resultado de la simulación de los comados anteriores se
describe en la figura 10.
Fig. 10 Simulación de la posición en donde coloca el objeto el
manipulador de acuerdo a la MTD (44)

Journal Objetos y Objetivos Matemáticos No. 1; julio-diciembre 2019.
ISSN 2683-264X. https://joom.org.mx
© Autor(es) 2019. Artículo de acceso abierto bajo licencia CC BY-NC-ND
19
VIII. MANUFACTURA.
Continuando con la metodología anterior y una vez
realizado el diseño, modelado matemático y comprobado
mediante su simulación en MATLAB como se describió
anteriormente, se procedió a realizar un CAM mediante el
programa AutoCAD del prototipo de acuerdo a los
parámetros diseñados.
9.-Creación de prototipos y pruebas: Para la construir la
estructura del prototipo se seleccionó el material SINTRA,
debido a que es un PVC no frágil que permite ser
manufacturado mediante una cortadora laser mediante un
archivo CAD/CAM. La pieza diseñada en el CAD/CAM
fueron manufacturadas mediante una cortadora laser y
ensambladas con los servomotores como se muestra en la
figura 11 y 12.
Fig 11. Piezas para manufactura de Cintra mediante corte laser mediante
el CAM.
El paso “10.- Producción” fue descartado debido a que el
prototipo tiene una función experimental de carácter científico
y ha sido registrada; sin embargo, puede ser producida por un
tercero solicitando los derechos correspondientes.
Fig 12. MATHBOT manufacturado y ensamblado en Cintra.
IX. PRUEBAS
Para realizar las pruebas se utilizó la tarjeta
servocontroladora reprogramable plug and play USB-HID
(Fajardo y Herrera, 2013) [22]; la cual permite controlar 30
servomotores simultáneamente mediante una GUI que
mediante sliders con interpolación de Lagrange para generar
el equivalente proporcional del valor del pulso PWM a cada
servomotor mediante un sistema neurodifuso que compara y
controla la posición actual del motoreductor respecto a la
deseada hasta colocarse en ella [23].
Para las pruebas del manipulador se colocaron ejes para
ordenadas y abscisas generando un mapa donde el robot fue
manipulado mediante la programación de la GUI siguiendo las
instrucciones obtenidas a través de las matrices modeladas y
simuladas previamente.
Fig. 13. GUI de la servocontroladora reprogramable USB-HID utilizada
en el CIINDET 2013 de la IEEE [22].

Journal Objetos y Objetivos Matemáticos No. 1; julio-diciembre 2019.
ISSN 2683-264X. https://joom.org.mx
© Autor(es) 2019. Artículo de acceso abierto bajo licencia CC BY-NC-ND
20
Los ángulos de las imágenes fueron medidos y reconocidos
por un sistema de reconocimiento de patrones con visión
artificial con base a los puntos indicados.
Se calibraron las posiciones máximas y mínimas de los
servomotores, así como la posición inicial de los eslabones
para que se adecuara con el modelo matemático anteriormente
descrito con ayuda del sistema de servocontrol.
Se comparó el resultado de cada uno de los movimientos
obtenidos por el robot físico respecto a la simulación y
modelado matemático.
Para el primer movimiento de calibración de cadena
energizada se obtuvo una posición que coincide con la MTD
(38) y la figura 14, en donde se encontró que coinciden las
alturas mínimas y corresponde a lo modelado.
Fig 14. MATHBOT en posición de cadena energizada.
Para el segundo movimiento se obtuvo una posición de
reposo de acuerdo a la Fig. 8 y la MTD (40) posicionando las
articulaciones en el piso como se describe en la figura 15.
Fig 15. MATHBOT En posición de reposo
Para tomar el objeto se utilizó la MTD (42) coincidiendo
con la simulación de la figura 9 y colocando el actuador final
(gripper) en modo de apertura para t0 y en cierre para t1, como
se describe en la figura 16.
Fig 16. MATHBOT En posición de toma de objeto.
Para colocar en su posición final el objeto se utilizó la
MTD (43) coincidiendo con la simulación de la figura 10 y
colocando el actuador final (gripper) en modo de cierre para
t0 y en apertura para t1 para liberar el objeto, como se describe
en la figura 17.
Fig 17. MATHBOT En posición de colocado de objeto.
X. CONCLUSIONES
Al haber diseñado de acuerdo a la metodología de Norton
[18], se logró la manufactura de un manipulador industrial
vertical de 5 GDL de tipo brazo robot modelando 5 eslabones,
6 servomotores y un gripper como actuador final, el modelado
matemático de su cinemática directa mediante matrices D-H
[21], su simulación en MATLAB, el diseño CAD de sus
eslabones y su manufactura CAM en SINTRA mediante corte
laser.

Journal Objetos y Objetivos Matemáticos No. 1; julio-diciembre 2019.
ISSN 2683-264X. https://joom.org.mx
© Autor(es) 2019. Artículo de acceso abierto bajo licencia CC BY-NC-ND
21
La metodología de diseño, modelado, simulación y
manufactura permitió la ensamble y construcción de un
prototipo de brazo robot con servomotores Hitec controlado a
través de una tarjeta USB-HID servocontroladora de
secuencias programables con una interfaz gráfica mediante de
sliders y valores [22] [23].
El prototipo fue diseñado para cumplir con las dimensiones
del modelo matemático y calibrado de acuerdo al espacio
cinemático simulado.
Las pruebas de movimiento realzadas con el prototipo de
brazo robot coincidieron con las simulaciones en MATLAB y
el modelo matemático [14], como se describe en las pruebas
de control de las figuras 14 a la 17 con sus respectivos modelos
matemáticos y simulaciones en MATLAB.
El modelado matemático de fenómenos físicos y su
comprobación mediante simulaciones permite la construcción
y control de maquinaria industrial, así como la descripción de
fenómenos físicos de manera universal.
Se resalta la importancia y aplicación de la matemática
como lenguaje de descripción de la realidad para poder
construir modelos matemáticos que permiten dar pie a
esquemas, diseños y simulaciones previas a la construcción de
maquinaria ahorrando tiempos, movimientos y un gasto
innecesario de recursos y materia de manufactura.
Es importante utilizar servomotores digitales que permiten
360 grados de libertad para pruebas específicas [23]; así
mismo se puede jugar con diseños estilizados del manipulador
en Sintra mientras se mantengan las distancias en un punto de
referencia y se calibren los servomotores a las posiciones de
arranque como se realizó en el experimento.
El prototipo se puede llevar a un sistema de ensamblaje
industrial profesional con materiales metálicos y servomotores
de corriente alterna mediante tarjetas controladores con
interfaces convertidoras.
REFERENCIAS
[1] Accreditation Board for Engineering and Technology, Inc (ABET)
Definition of Engineering Design. Consultado el 14 de Mayo de 2019.
Disponible en: https://www.abet.org/accreditation/accreditation-
criteria/criteria-for-accrediting-engineering-programs-2016-2017/ .
[2] Hawkins, T. W.: Weierstrass and the theory of matrices: Archive for
History of Exact Sciences 17 (USA,1977).
[3] Gerolamo, C. trad. Witmer, T. R.: The Rules of Algebra (Ars Magna).
Paperback: Dover Publications (USA,2007).
[4] Knobloch, E.: Determinants: Companion Encyclopedia of the History
and Philosophy of the Mathematical Sciences (USA,1994).
[5] De Witt's, J.: Elementa Curvarum Linearum Liber Secundus: Edited by
Jan Aarts & Edited by Miente Bakker , Edited by Reinie Erne: Springer
(UK, 2010).
[6] Knobloch, Eberhard, Komatsu, Hikosaburo, Liu, Dun (Eds.): Seki,
Founder of Modern Mathematics in Japan: Springer (Japan, 2013).
[7] MacLaurin, C.: Treatise of Algebra Vol I-III Containing. The
fundamental rules: J. Nourse, W. Strahan, J. F. and C. Rivingtons, W.
Johnston, T. Longman, G. Robinson, and T. Cadell Editors (USA,1749)
[8] Cramer. G.: Introduction a l'Analyse des Lignes Courbes Algébriques:
Freres Cramer & Cl. Philbert (Génova,1750).
[9] Luigi, P.: Lagrange (1736–1813): a life in mathematics: Lettera Matematica June 2014, Volume 2, Issue 1–2, pp 3–8. Pepe, L. Lett Mat
Int (USA,2014) 2: 3.
[10] Gauss, C. F.: Disquisitiones Arithmeticae: Nabu Press (USA, 2014)
[11] Malykh, A E.: Development of the general theory of determinants up to
the beginning of the nineteenth century (Russian): Mathematical
analysis: (Leningrad, 1990), 88-97.
[12] Gauss, C. F.: Disquisitiones generales circa superficies curvas: Typis
Dieterichianis. Collection (USA,1828).
[13] Swetz, F. J.: Mathematical Treasure: Cauchy's Mathematical Exercises:
Pennsylvania State University (USA,1826).
[14] Mikhalkin, E. N.: Solution of fifth-degree equations: Russian Mathematics 53(6):15-23 (U.R.S.S., 2009) DOI:
10.3103/S1066369X09060036.
[15] Eigner, M.: An Initial Approach for the Application of Product Assembly Information in the Early Phases of the Product Development
Process by Using Methods of Model Based Systems Engineering:
Proceedings of the Nord Design 2014;724-733 (USA,2014).
[16] Labarca, Claudio; Culagovski, Rodrigo y Danilo Lagos.: Nuevos
territorios: El modelo digital como laboratorio de formas en la
enseñanza de la arquitectura: Ponencias SIGRADI 2005: Porto Alegre
Ed. (Brazil, 2005).
[17] Bonsiepe, G.: Diseño Industrial, Tecnología y Dependencia: Edicol
(Colombia,1978).
[18] Norton, R.: Diseño de Maquinaria. Mc Graw Hill.Rodríguez, G.
(México, 2009).
[19] Dulces Anahuac: Caramelo Selz Soda. http://www.dulcesanahuac.com/148/productos/selz-soda/ Consultado el
14 de Mayo de 2019.
[20] ISO. Standard 8373. https://www.iso.org/standard/55890.html
Consultado el 14 de Mayo de 2019.
[21] Hartenberg and J. Denavit: Kinematic Synthesis of Linkages: McGraw-
Hill, (USA,1964).
[22] Fajardo-Rendón, M. y Herrera-Armendia, F.-G.: Servocontrolador
Reprogramable para Articulaciones Robóticas USB HID: Memorias del
IEEE X Congreso Internacional Sobre Innovación y Desarrollo Tecnológico: CIINDET IEEE. 2013, Cuernavaca, Morelos, 13-15 de
Marzo, 2013: IEEE international (México, 2013).
[23] Fajardo-Rendón, M. y Herrera-Armendia, F.-G.: Diseño de un sistema neurodifuso de conversión PWM a motoreductor CD: Modelado y
aplicación: Memorias del 1er Congreso Nacional de Matemáticas, su
enseñanza y aprendizaje 2016: Marcos Fajardo Rendón y Francisco
Guillermo Herrera Armendia Editores (México,2016).

Journal Objetos y Objetivos Matemáticos No. 1; julio-diciembre 2019.
ISSN 2683-264X. https://joom.org.mx
© Autor(es) 2019. Artículo de acceso abierto bajo licencia CC BY-NC-ND
22
Subdominios y categorías del conocimiento
especializado que emergen en el futuro docente al
enseñar la construcción de círculos.
Marleny Hernández Escobar
Escuela Normal Superior de México
Escuela Normal Superior de México, Manuel Salazar 201 Colonia Ex-hacienda del Rosario, Azcapotzalco,
02420 CDMX, México.
Resumen- El estudio analiza la práctica del futuro docente de
séptimo semestre de la Escuela Normal Superior de México al impartir clases de geometría con estudiantes de primer grado de secundaria, con la finalidad de identificar los subdominios del
conocimiento pedagógico de contenido del modelo del Conocimiento Especializado del Profesor de Matemáticas [1] para generar explicaciones acerca de los procesos de apropiación
de los recursos empleados en el proceso enseñanza-aprendizaje, normados por el conocimiento matemático.
Esta investigación es un estudio de caso donde se indaga
mediante video grabaciones el conocimiento especializado de una futura profesora de secundaria que integra el uso de GeoGebra en el salón de clases para la enseñanza de la geometría, la
finalidad es investigar y categorizar de qué manera el uso del recurso computacional interviene en la comprensión de la construcción de círculos a partir de diferentes datos.
Palabras Calve- conocimiento especializado, construcción de
círculos, enseñanza, futuro docente.
Abstract- The study analyzes the practice of the future
seventh semester teacher of the Escuela Normal Superior de
México by teaching geometry classes with first graders of high
school, in order to identify the subdomains of pedagogical
knowledge of content in the Specialized Knowledge model of the
Professor of Mathematics [1] to generate explanations about the
processes of appropriation of the resources used in the teaching-
learning process, standardized by mathematical knowledge.
This research is a case study where video recordings
investigate the specialized knowledge of a future high school
teacher who integrates the use of GeoGebra in the classroom for
the teaching of geometry, the purpose is to investigate and
categorize how the use of computational resource is involved in
understanding of building circles from different data. Keywords- specialized knowledge, circle building, teaching,
future teacher.
Mathematical Subject Classification: 00A35
I. INTRODUCCIÓN
Para analizar la práctica del futuro profesor de matemáticas
fue necesario tener un marco fundamentado en un modelo
situado en el centro del conocimiento matemático que el
profesor debe enseñar y en la actividad matemática que ello
supone llevar a cabo, para ello fue adoptado el modelo
propuesto por [1] denominado Conocimiento Especializado
del Profesor de Matemáticas, este modelo consta de seis
subdominios [2]. Para el análisis solo se usan los que
corresponden al PCK (Pedagogical Content Knowledge) ya
que el futuro profesor debe conocer el contenido matemático
desde el punto de vista de un contenido a enseñar, desde el
punto de vista de un contenido a aprender y desde una visión
general de los estándares de aprendizaje que se pretenden
alcanzar considerando según [2] tres subdominios: a) el
Conocimiento de las características del aprendizaje, que se
interesa por el conocimiento relacionado con las
características de aprendizaje derivadas de su interacción con
el contenido matemático, b) el Conocimiento de la enseñanza
de la matemática, el cual incluye el conocimiento de recursos,
materiales, modos de presentar el contenido y el potencial que
puede tener para la instrucción, además de los ejemplos
adecuados para cada contenido y c) el Conocimiento de los
estándares de aprendizaje de las Matemáticas, ya que
considera el conocimiento que el futuro profesor tiene acerca
de lo que está estipulado que aprenda un estudiante de
secundaria y su nivel conceptual es decir el currículo
institucional.
En México la formación de los futuros profesores de
educación Básica es a través de las normales que son
instituciones Federales dependientes de la Secretaría de
Educación Pública (SEP) para el nivel de secundaria la
Escuela Normal Superior de México (ENSM), en sus
diferentes especialidades, para séptimo y octavo semestres
prepara al futuro profesor para llevar a cabo el trabajo docente
“en condiciones reales”, su permanencia en la escuela
secundaria (23 semanas) es durante todo el ciclo escolar [3],
por ello el interés del estudio fue indagar en la práctica de un
futuro docente de séptimo semestre el conocimiento
pedagógico de contenido, a través de las video grabaciones de
las clases impartidas a estudiantes de primero de secundaria
con el tema de círculo.
II. REFERENTE TEÓRICO
El Marco Teórico de esta investigación se basa en el
Conocimiento Especializado del Profesor de Matemáticas, en
adelante MTSK (Mathematics Teacher’s Specialised
Knowledge) [2].
Partimos de la consideración de que en el conocimiento del
profesor para la enseñanza de la matemática más relativo al
propio contenido matemático, se pueden considerar dos
dominios principales: conocimiento del contenido (MK por
sus siglas en inglés) y conocimiento didáctico del contenido
(PCK). Nos interesa el carácter especializado del
conocimiento del profesor de matemáticas, entendiendo que

Journal Objetos y Objetivos Matemáticos No. 1; julio-diciembre 2019.
ISSN 2683-264X. https://joom.org.mx
© Autor(es) 2019. Artículo de acceso abierto bajo licencia CC BY-NC-ND
23
no debe restringirse a un subdominio del conocimiento
matemático, sino a todos sus subdominios. En ese sentido,
asociamos la especificidad de dicho conocimiento a que se
refiere a la enseñanza de la matemática, lo que debe reflejarse
en el conocimiento del profesor en su conjunto.
La figura 1 representa el modelo del Conocimiento
Especializado del Profesor de Matemáticas [1], se quita la
parte central del modelo que corresponde a creencias por no
ser parte del presente estudio.
Se utiliza el MTSK como modelo teórico debido a que se
diferencia del conocimiento en pedagogía y psicología
general, del conocimiento especializado del profesor de otra
materia y del conocimiento especializado de otro profesional
de la matemática, siendo una herramienta metodológica que
admite analizar distintas prácticas del futuro profesor de
matemáticas, y permite interpretar su conocimiento
especializado a través de sus categorías.
El MTSK es un elemento que ayuda a organizar una
reflexión (colectiva o individual) sobre el conocimiento para
enseñar matemáticas haciendo uso de conocimientos prácticos
donde el futuro docente sea consciente de los conocimientos
que posee o que le faltan, a través de diseños de tareas con una
estructura específica y la ejecución de las mismas para formar
un entorno de aprendizaje con el análisis de sus errores, tiene
que ver con su actuar integrando las diferentes formas con las
que se interactúa de cara a la enseñanza.
En este estudio se pretende observar el Conocimiento
Especializado del Profesor de Matemáticas (MTSK) que posee
el futuro docente para la enseñanza de las matemáticas y de
qué forma éste conocimiento se modifica cuando se resuelven,
se diseñan y se aplican actividades con el uso de GeoGebra
que orientan la tarea educativa.
La estructura del modelo teórico del MTSK se desarrolla
con base en los dominios que se describen a continuación:
Dominio de Conocimiento Matemático (MK)
Dominio fundamental en el futuro profesor debido a que
es el conocimiento de la propia disciplina que se enseña,
considera tres subdominios que lo componen y le dan sentido:
Fig. 1. Subdominios del Conocimiento Especializado del Profesor de
Matemáticas
Subdominio de Conocimiento de los Temas Matemáticos
(KoT). Es un conocimiento profundo que consiste en conocer
los contenidos matemáticos que se enseñarán (conceptos,
procedimientos, hechos y reglas entre otros) y sus significados
de manera fundamentada. Subdominio de Conocimiento de la
Estructura Matemática (KSM). Este subdominio tiene sus
bases en lo descrito por [4] como Conocimiento del horizonte
matemático, este conocimiento de las matemáticas permitirá
al futuro profesor reflexionar sobre algún contenido para
trabajar la matemática desde un punto de vista integral y
estructurado para comprender y desarrollar conceptos
avanzados desde una perspectiva elemental y conceptos
elementales mediante una visión avanzada.
Subdominio de Conocimiento de la Práctica Matemática
(KPM). Este subdominio contempla cómo es construida la
matemática y destaca la importancia de que el docente
conozca las formas de proceder para llegar a resultados y
características de un trabajo matemático sabiendo cómo se
explora y cómo se genera conocimiento a través de establecer
relaciones, correspondencias, equivalencias.
Dominio de Conocimiento Didáctico del Contenido (PCK)
Este conocimiento incluye los conocimientos que el
profesor tiene sobre los temas enseñados con regularidad, es
decir, todas las formas de representación (ilustraciones) y
formulación (ejemplos y explicaciones) que hagan que el
contenido sea comprensible para otros al considerar los
siguientes subdominios.
Subdominio de Conocimiento de las Características del
Aprendizaje (KFLM). Este conocimiento permitirá al futuro
profesor adquirir una mayor consciencia del ambiente escolar
en el que se desarrollan las prácticas docentes para poder
abordar los temas de una forma más personalizada y ajustada
a las necesidades de los alumnos de secundaria.
Subdominio de Conocimiento de la Enseñanza de la
Matemática (KMT). Este subdominio incluye el conocimiento
de recursos, materiales (dibujos, modelos manipulables,
diagramas, lenguajes hablados o símbolos escritos), modos de
presentar el contenido y el potencial que puede tener para la
instrucción de un concepto o procedimiento matemático.
Subdominio de Conocimiento de los Estándares de
Aprendizaje de las Matemáticas (KMLS). Aquí se considera
el conocimiento que el futuro profesor tiene acerca de lo que
está estipulado que aprenda un estudiante de secundaria y su
nivel conceptual, para poder dar una ubicación temporal y
contextual al contenido abordado.
El análisis del MTSK que posee el futuro profesor
permitirá saber dónde se está y hacia dónde se quieren orientar
los esfuerzos, de esta manera puede haber cambios
importantes en la forma de ver, entender y llevar a cabo la
enseñanza, debido a que es necesario pensar e investigar sobre
las características de la formación inicial del profesor, la
integración del conocimiento que el futuro docente requiere
para su labor docente y el conocimiento matemático, es
precisamente lo que conforma el conocimiento especializado.
III. METODOLOGÍA
El objetivo en el que se centra éste estudio es identificar
qué conocimiento respecto a los subdominios y categorías del
MTSK que emergen en las prácticas pedagógicas de una futura
profesora cuando enseña la construcción de círculos usando
Geogebra en el aula de matemáticas, es un estudio de caso

Journal Objetos y Objetivos Matemáticos No. 1; julio-diciembre 2019.
ISSN 2683-264X. https://joom.org.mx
© Autor(es) 2019. Artículo de acceso abierto bajo licencia CC BY-NC-ND
24
porque examina una situación única, sin intención de
generalizarla, de acuerdo con [5], los estudios de caso son
ejemplos (instance) específicos que frecuentemente están
diseñados para ilustrar un “principio más general” y con ellos
pueden investigar situaciones que informan acerca de “las
interacciones dinámicas y el desarrollo de eventos, relaciones
humanas y otros factores en un ejemplo único”, y hacer
“declaraciones teóricas […] [que] deben estar respaldadas con
evidencia”.
El foco de interés gira en torno a los recursos matemáticos
y didácticos que varios profesores ponen en juego para enseñar
a sus estudiantes la construcción de círculos a partir de
diferentes datos (el radio, una cuerda, tres puntos no alineados,
etc.) o que cumplan condiciones dadas. Ubicado en el bloque
4 de primer año de secundaria en el eje forma espacio y
medida, efectuado en dos grupos durante 5 sesiones.
Analizamos las sesiones en las que la futura profesora usa
Geogebra en el laboratorio de cómputo. Para la recogida de
información la técnica privilegiada fue la observación no
participativa, en ese sentido, [6] argumenta que el investigador
registra lo que acontece a través de la observación con la
finalidad de ofrecer una “descripción […] incuestionable”
para, posteriormente, analizarla (cursivas en el original). Por
los argumentos antes mencionados, la observación se llevó
cabo mediante video-grabaciones (una cámara dirigida, hacia
lo que hizo y dijo el profesor), reforzadas con audio-
grabaciones y notas de campo.
El análisis que según [6] consiste en darle sentido a los
datos recopilados, dejando de lado nuestras impresiones,
estuvo centrado en las prácticas docentes de una futura
profesora de la Licenciatura de Educación Secundaria con
Especialidad en Matemáticas que cursaba el séptimo semestre
en la Escuela Normal Superior de México.
IV. RESULTADOS
Una vez analizadas en su conjunto las 5 sesiones de clase
del tema acerca de la construcción de círculos a partir de
diferentes datos (el radio, una cuerda, tres puntos no alineados,
etc.) o que cumplieran condiciones dadas, pasamos a describir
los subdominios y categorías del Conocimiento Especializado
del Profesor de Matemáticas (MTSK) de los que se obtuvieron
evidencias. El subdominio de conocimiento que emergió más
es el Conocimiento de los Temas (KoT), en distintas
categorías. También hallamos indicios del conocimiento de la
Práctica Matemática (KPM), referente a formas de proceder
en el desarrollo del contenido, además del Conocimiento de la
Enseñanza de las Matemáticas (KMT), concerniente a
ejemplos para la enseñanza; y el Conocimiento de las
Características del Aprendizaje de las Matemáticas (KFLM),
surgió referido siempre a la categoría fortalezas y dificultades
asociadas al aprendizaje, en relación con el tema en cuestión.
V. CONOCIMIENTO DE LOS TEMAS (KOT - KNOWLEDGE OF
TOPICS)
El conocimiento de los temas (KoT) tiene cierta
profundidad y se evidencia en sus categorías: procedimientos,
propiedades y sus fundamentos, fenomenología y aplicaciones.
El futuro profesor está al tanto de los procedimientos, conoce
cómo llevarlos a cabo, cuándo es conveniente utilizarlos, qué
restricciones tienen y establece con detalle los posibles
resultados o lo que se espera obtener, el análisis conjunto de
las sesiones de clase nos muestra que se trata de un
conocimiento razonado y sólido.
En cuanto a procedimientos, el futuro profesor evidencia su
conocimiento acerca de los círculos, así como de su
construcción a partir de diferentes datos como el radio, la
cuerda y tres puntos no alineados, define a la circunferencia
como una curva plana y cerrada, cuyos puntos equidistan de un
punto interior llamado centro y al círculo como la superficie
plana limitada por la circunferencia. Además, el futuro
profesor indica que “el radio es la recta que une el centro con
un punto cualquiera de la circunferencia”, también identifica al
diámetro como la mayor de las cuerdas cuando menciona que
“el diámetro es la recta que une dos puntos de la circunferencia
y que la cuerda de la circunferencia es toda recta que une dos
puntos de la circunferencia” por otro lado alude que “el arco es
la porción de circunferencia limitada por dos puntos que son
llamados extremos del arco”.
El conocimiento del futuro profesor se manifiesta en el
momento en el que construye circunferencias a partir de un
punto dado e identifica porqué es una condición insuficiente
para realizar una sola circunferencia. Este conocimiento sobre
cómo llevar a cabo un procedimiento refleja algunas de sus
destrezas que ayuda a que el estudiante de secundaria se quede
con una imagen clara de estos procedimientos.
El conocimiento acerca de las propiedades y los
fundamentos se evidencia cuando el futuro profesor solicita a
los estudiantes que tracen una circunferencia que pase por el
punto P, después les pide que marquen el centro y que lo
denoten con la letra C, enseguida les indica que con otra
medida tracen otra circunferencia que pase por el punto P y que
denoten el centro con la letra Q, posteriormente les cuestiona
“cuántas circunferencias se pueden trazar que pasen por el
punto P”.
Notamos su conocimiento para la construcción de
circunferencias, fundamentado en sus propiedades, cuando de
forma grupal concluyen que “se pueden trazar diferentes
circunferencias a partir de un punto dado porque el centro y el
radio no tienen ninguna restricción”.
Dicha propiedad no es sólo expresada de manera verbal,
sino que el futuro profesor resalta algunas características
importantes para que los estudiantes observen que la distancia
del punto P a cada una los centros de las circunferencias no es
la misma porque las circunferencias que se trazaron fueron de
distintas medidas, la distancia del punto P a cada uno de los
centros es diferente.
Con los conocimientos de la actividad anterior el futuro
profesor indica a los estudiantes que el radio es un segmento
que une el centro con cualquier punto de la circunferencia y les
solicita que identifiquen si el segmento RS̅̅̅̅ es el radio de cada
circunferencia.
Fig. 2. Segmentos 𝐸𝐷̅̅ ̅̅ , 𝑃𝐶̅̅̅̅ y 𝐶𝑇̅̅̅̅ en el círculo.

Journal Objetos y Objetivos Matemáticos No. 1; julio-diciembre 2019.
ISSN 2683-264X. https://joom.org.mx
© Autor(es) 2019. Artículo de acceso abierto bajo licencia CC BY-NC-ND
25
Observamos el conocimiento fundamentado en propiedades
cuando los estudiantes indican que los segmentos 𝐸𝐷̅̅ ̅̅ y 𝑃𝐶̅̅ ̅̅ no son radios (figura 2) “porque el segmento une dos
puntos de la circunferencia y debe unir el centro con cualquier
punto de dicha circunferencia” además indican que el
segmento 𝐶𝑇̅̅̅̅ sí es radio “porque une el centro con cualquier
punto de la circunferencia” y concluyen “una de las
propiedades de la circunferencia es que se puede trazar un
número indefinido de radios y todos los radios son iguales”.
Su conocimiento sobre la fenomenología y aplicaciones del
contenido, se enmarca principalmente en la propia matemática,
así, el futuro profesor conoce que el arco es la porción de
circunferencia limitada por dos puntos que son llamados
extremos del arco, hace alusión a aplicaciones de este
contenido en la arquitectura, él menciona que “el arco de medio
punto se usó en la arquitectura romana y renacentista, el arco
ojival es característico del estilo gótico, desarrollado en Europa
durante la edad media y el arco de talón es utilizado en el arte
indio y bizantino” (figura 3), entrega de forma impresa las
imágenes correspondientes y durante las clases orienta a los
estudiantes para realizar los trazos respectivos.
Este conocimiento del futuro profesor sobre fenomenología
y aplicaciones dentro del contexto matemático lo evidencia a
lo largo del desarrollo de las clases, establece conexiones que
reflejan la utilidad de unos temas como es la construcción de
circunferencias (con centro y radio dados) para el trabajo con
otros dentro del mismo contenido por ejemplo los arcos.
Pensamos en estas conexiones como relaciones intra
conceptuales (que forman parte del KoT y se establecen en la
proximidad de un único concepto) debido a que son contenidos
muy cercanos que se complementan unos con otros.
VI. CONOCIMIENTO DE LA PRÁCTICA MATEMÁTICA (KPM -
KNOWLEDGE OF PRACTICES IN MATHEMATICS)
Encontramos indicios del conocimiento de la práctica
matemática del futuro profesor sobre formas de proceder en
matemáticas, que relacionamos con un conocimiento de cómo
se desarrollan las matemáticas, en este caso se trata de prácticas
que asociamos a la simplificación de los procedimientos, a
abarcar la exhaustividad de los casos y evitar errores.
Además, incluimos aquí el conocimiento del futuro
profesor sobre el papel de la notación matemática, debido a que
menciona algunas características del radio (son iguales, se une
el centro con cualquier punto del círculo) y del diámetro (es la
mayor de las cuerdas, une dos puntos de la circunferencia
pasando por el centro, es el doble del radio).
Encontramos también indicios de conocimiento de la
práctica en la justificación que hace para los alumnos sobre el
papel de la notación matemática, al advertir que los vértices se
denotan con letras mayúsculas.
El futuro profesor busca la precisión y promueve cierto
rigor en el uso de la notación matemática en sus clases.
Durante la clase el futuro profesor guía y cuestiona a sus
estudiantes, ejemplo de ello es el siguiente episodio de una
construcción realizada con GeoGebra:
Futuro profesor: Da clic en archivo, luego selecciona
la opción nuevo y quita los ejes. Traza un segmento AB.
Selecciona el icono de circunferencia y con la
herramienta (centro, punto) traza una circunferencia
seleccionando los dos puntos: A y luego B. ¿Qué
elemento de la circunferencia representa el segmento
AB?
Estudiantes: El radio de la circunferencia.
Futuro profesor: Sobre la circunferencia traza un
punto C, luego con la herramienta segmento une el
centro denotado como A de la circunferencia con el
punto C. ¿Qué elemento del círculo representa el
segmento AC?
Estudiantes: También es radio de la circunferencia.
Futuro profesor: Selecciona la flecha blanca que se
encuentra en la parte superior izquierda, localiza el
punto C y muévelo. ¿Qué sucede con este radio?
Estudiantes: Se mueve alrededor del círculo, no se
mueve el centro.
Futuro profesor: ¿La medida del radio cambia de
tamaño o permanece igual?
Estudiantes: Permanece igual, nunca cambiará
porque los radios de toda circunferencia son iguales.
Futuro profesor: Realiza una conclusión incluyendo la
definición y propiedades que aprendiste acerca del
radio.
Estudiantes: Es el segmento que une el centro con
cualquier punto de la circunferencia. Todos los radios
son iguales en una misma circunferencia.
VII. CONOCIMIENTO DE LA ENSEÑANZA DE LAS MATEMÁTICAS
(KMT - KNOWLEDGE OF MATHEMATICS TEACHING)
Observamos que el futuro profesor utiliza una variabilidad
de ejemplos para la enseñanza, el conocimiento de la
enseñanza de las matemáticas (KMT) le permite trabajar con
diferentes ejercicios relacionados con un mismo tema, de los
que destaca sus características particulares a través de ejemplos
impresos en hojas de trabajo y normalmente no sólo emplea
uno, sino que, cuando aborda cada tema incluido en el
contenido a través del cual hemos analizado su conocimiento,
utiliza tres o cuatro ejemplos con diferentes características.
Fig. 3. Aplicaciones del tema de arco.

Journal Objetos y Objetivos Matemáticos No. 1; julio-diciembre 2019.
ISSN 2683-264X. https://joom.org.mx
© Autor(es) 2019. Artículo de acceso abierto bajo licencia CC BY-NC-ND
26
VIII. CONOCIMIENTO DE LAS CARACTERÍSTICAS DEL
APRENDIZAJE DE LAS MATEMÁTICAS (KFLM - KNOWLEDGE OF
FEATURES OF LEARNING MATHEMATICS)
En casi todas las sesiones de clase el futuro profesor muestra
conocimiento sobre los principales errores y dificultades de los
estudiantes con relación al contenido, lo cual se enmarca en la
categoría fortalezas y dificultades asociadas al aprendizaje. El
futuro profesor procura advertir a los estudiantes qué errores
no deben cometer. Este conocimiento está relacionado con su
conocimiento de procedimientos y otros aspectos del KoT que
muestran cierta profundidad; como cuando hace énfasis en la
importancia de tener en cuenta que todos los radios en un
mismo círculo son iguales.
Así, como parte de su conocimiento sobre fortalezas y
dificultades asociadas al aprendizaje, relacionadas con la
construcción de la circunferencia que pasa por tres puntos
dados [7], el futuro profesor identifica como una dificultad
para el estudiante de secundaria reconocer el punto de
intersección de las mediatrices como el centro de la
circunferencia; además, percibe como fortalezas los
conocimientos que se utilizaron en las actividades anteriores
relacionados a que los segmentos 𝐶𝐵̅̅ ̅̅ , 𝐴𝐶̅̅ ̅̅ 𝑦 𝐴𝐵̅̅ ̅̅ son cuerdas y
que la distancia 𝐷𝐴̅̅ ̅̅ , 𝐷𝐵̅̅ ̅̅ 𝑦 𝐶𝐷̅̅ ̅̅ es la misma, porque
corresponden a radios de la misma circunferencia.
IX. CONCLUSIONES
Vemos el uso de hojas de trabajo, material concreto (episodio
anterior), el juego de geometría y el software GeoGebra como
apoyo para impartir las clases de geometría (Figura 1), se
observa parte del Conocimiento de la enseñanza de la
matemática (KMT - Knowledge of Mathematics Teaching) ya
que se incluyen recursos que apoyan la forma de presentar los
contenidos, mostrando el potencial que puede tener el
conocimiento por parte del futuro docente de dichos recursos
para la instrucción.
Sobre el conocimiento de las características del aprendizaje
matemático (KFLM - Knowledge of Features of Learning
Mathematics), observamos que el futuro docente revisa el
trabajo de sus estudiantes constantemente para identificar
dudas o confusiones, además considera las ideas de los
estudiantes como apoyo para las actividades que realiza en el
pizarrón y aclara las dudas que se presentan en el transcurso de
la clase, también muestra una organización en sus clases y un
uso correcto de recursos. El conocimiento perteneciente a los
subdominios del KMT y el KFLM fue detectado al reflexionar,
no sobre la construcción en sí, sino sobre la acción del profesor
de usar el juego de geometría, el software y las hojas de trabajo
para ayudar a los alumnos a seguir sus razonamientos.
Desde la perspectiva que aporta este modelo, y teniendo en
cuenta las ideas vertidas en [1] sobre los distintos subdominios,
los resultados parciales muestran distintas dimensiones,
aunque desde esta perspectiva, todo el conocimiento que se
puso en juego durante las clases fue especializado, por ser
propio de su futura profesión.
La necesidad de conocimiento en estos subdominios para
el uso de Geogebra parece claro (conocimiento de la propia
herramienta como recurso de enseñanza y el aprendizaje ligado
a ella, y el conocimiento del contenido ligado a cómo se
expresa y trabaja matemáticamente la herramienta).
El conocimiento especializado emergió al reflexionar, no
sobre la construcción en sí, sino sobre la acción del futuro
profesor al usar instrumentos geométricos además de usar
software GeoGebra para ayudar a los alumnos a seguir sus
razonamientos.
Consideramos que el conocimiento que se mostró fue en
relación con las explicaciones acerca de la construcción de la
mediatriz como la recta perpendicular a un segmento que pasa
por su punto medio, con base en las ideas vertidas por [1] sobre
los distintos subdominios, todo el conocimiento que se puso en
juego durante las clases fue especializado, por ser propio de su
futura profesión.
El conocimiento matemático es el que subyace en la base
del conocimiento especializado del futuro profesor. La relación
entre el conocimiento de las características del aprendizaje
(KFLM) y el conocimiento de la enseñanza de las matemáticas
(KMT) es tan cercana que la distinción entre los conocimientos
que pertenecen a uno y otro subdominio podría parecer
complicada o innecesaria, sin embargo, los resultados ésta
estudio nos han permitido valorar la potencialidad que tiene
realizar esta distinción, en tanto que permite interpretar y
comprender más profundamente la naturaleza del
conocimiento del futuro docente desde dos perspectivas o
formas de conocer el contenido matemático, como contenido a
aprender y como un contenido a enseñar.
Las conclusiones sobre la caracterización del KMT
permitieron profundizar más sobre esta relación.
El contexto de diseño, justificación y discusión de
actividades para el aula es un entorno propicio para la
exploración del KFLM, puesto que el futuro profesor requiere
de utilizar el KFLM para diseñar tareas y anticipar posibles
procesos de los resolutores, además de que la discusión con sus
tutores, la reflexión entre pares y la necesidad de una
comunicación escrita propia del entorno virtual demandan del
futuro profesor argumentaciones que justifiquen el diseño y la
toma de decisiones sobre éste.
No es indispensable que el futuro profesor centre su
atención en los estudiantes como actores principales del
proceso de aprendizaje para obtener evidencias de este
conocimiento, éstas son también reconocibles en reflexiones
sobre la construcción del diseño y las características
específicas del contenido a abordar.
Cuando el futuro profesor está consciente de su
conocimiento especializado puede adquirir un bagaje de
conocimiento sobre estudios científicos y evidencias empíricas
que le proporcionen información sobre fortalezas y debilidades
asociadas al aprendizaje, las formas más comunes de
interacción con el contenido, así como los intereses y
expectativas que existen sobre un contenido, además, por
supuesto, de poder reconocer teorías de aprendizaje que le
permitan observar distintas formas de comprender un
contenido y construir una idea propia acerca del proceso de
aprendizaje.
REFERENCIAS
[1] Carrillo, J.; Climent, N.; Montes, M.; Contreras, L.C.; Flores-
Medrano, E.; Escudero-Ávila, D.; Vasco, D.; Rojas, N.; Flores, P.;
Aguilar-González, A.; Ribeiro, M.; Muñoz-Catalán, M.C.: The
Mathematics Teacher’s Specialised Knowledge (MTSK) model.
Research in Mathematics Education (2018).
[2] Carrillo, J.; Montes, M. A.; Contreras, L. C.; Climent, N.: Les connaissances du professeur dans une perspective basée sur leur
spécialisation: MTSK. Annales de didactique et de sciences
cognitives, 22, 185-205 (2017).
[3] Secretaría de Educación Pública- Subsecretaría de Educación
Básica y Normal. Lineamientos para la organización del trabajo

Journal Objetos y Objetivos Matemáticos No. 1; julio-diciembre 2019.
ISSN 2683-264X. https://joom.org.mx
© Autor(es) 2019. Artículo de acceso abierto bajo licencia CC BY-NC-ND
27
académico durante séptimo y octavo semestres. Licenciatura en
Educación Secundaria.SEP (2004).
[4] Ball, D. L.; Thames, M. H.; Phelps, G.: Content knowledge for
teaching: What makes it special?. Journal of Teacher Education,
59 (5), 389-407 (2008).
[5] Cohen, L.; Manion, L.; Morrison, K.: Research methods in
education. Routledge Falmer (2004).
[6] Stake, R. E.: Investigación con estudio de casos [estudios de caso].
Morata (1999).
[7] Legendre, A. M: Éléments de Géométrie. Paris, Firmin-Didot
(1794).

Journal Objetos y Objetivos Matemáticos No. 1; julio-diciembre 2019.
ISSN 2683-264X. http://joom.org.mx
© Autor(es) 2019. Artículo de acceso abierto bajo licencia CC BY-NC-ND
28
Una visión de la currícula en Matemáticas
Isaac Villavicencio Gómez Escuela Normal Superior de México, Manuel Salazar 201 Colonia Ex-hacienda del Rosario, Azcapotzalco,
02420 CDMX, México.
Resumen- La nueva visión de la currícula en matemáticas es la integración de mejoras a los planes y programas de estudio en
un futuro próximo, para de integrar acorde a los cambios sociales, elementos de la matemática con base en elementos de estudio y avances conocidos.La finalidad, es que el docente y
alumno aprendan que hay cambios en la matemática y que es relevante prepararse desde la educación básica al nivel superior, para que un alumno lleve bases de conocimiento
matemático en que comprenden la relevancia de los temas de clase.Mediante la clasificación de temas se da una aproximación inicial mediante el se propone una visión de la currícula
renovada que incida en que se apliquen cambios acordes al contexto social y debidamente fundamentados. La parte actitudinal es sustantiva que se impregne en las clases de los
docentes de educación básica a un modo conceptual o reflexivo en la educación media superior y a un tono mayor en lo conceptual y aplicativo según corresponda el tema.
Palabras Clave- currículm, planeación, programas de
estudio, escuelas normales. Abstract- The new vision of the curriculum in mathematics is
the integration of improvements to the plans and programs of
study in the near future to integrate according to social changes, elements of mathematics based on known elements of study and progress.The aim is that teachers and students learn that there
are changes in mathematics and is relevant prepared from basic education to higher level, for a student to take mathematical knowledge bases they understand the importance of class
issues.Through four classifications of subjects an overview by which it is generated a vision of the renewed curriculum that affects chord changes apply to social and duly substantiated
given context. The Attitudinal substantive part is that pervade in classes of teachers of basic education to a conceptual or reflective mode in upper secondary education and a major key
in the conceptual and applicative as appropriate theme.
Key Words- curriculum, planning, study programs,
normales schools.
Mathematical Subject Classification: 97B50.
I. INTRODUCCIÓN
El currículum hoy en día muestra la trayectoria que una
persona ha tenido en el tramo educativo como en el laboral,
tenemos en boga el modelo educativo por competencias
profesionales, la cual hoy articula conocimientos globales,
conocimientos profesionales y experiencias laborales, como
el identificar la experiencia, entonces lo anterior combina
elementos que permite identificar las necesidades hacia las
cuales se orientará la formación profesional.
El currículo es un elemento de mucho valor donde se
plasma la enseñanza, cuándo enseñar, cómo enseñar, cuándo
y cómo evaluar. Integro la siguiente frase como contexto. -
“…la evaluación se orienta a derivar aprendizajes del
desarrollo del curriculum, sirviendo para mejorar el curso,
para decidir qué materiales de instrucción y qué métodos son
satisfactorios y cuándo es necesario cambiar.” [1]
La visión de la currícula en matemáticas es comprender la
importancia de revisar y mejorar los planes y programas de
estudio actuales de educación, con los nuevos temas a
integrar, entonces se presentan 4 clasificaciones que explican
cambios de impacto que se observan en los temas de
matemáticas. Se integra además aspectos importantes que se
deben mantener presentes al elaborar una curricula, ya que la
evaluación en lo interno y externo es vital dentro de la
propuesta a realizar, así como alinear de forma fundamentada
el contenido a los aspectos de psicopedagogía, política y
economía, sociología y epistemología.
II. DESARROLLO
El currículo son el conjunto de criterios, planes de estudio,
programas, metodologías, y procesos que contribuyen a la
formación integral y a la construcción de la identidad cultural
nacional, regional y local, incluyendo también los recursos
humanos, académicos y físicos para poner en práctica las
políticas y llevar a cabo un proyecto educativo institucional.
[2]
El currículo incluye los recursos humanos, académicos y
físicos, para poner en práctica las políticas y llevar a cabo un
proyecto educativo institucional. Los alcances son la
formación integral y a la construcción de la identidad cultural
nacional, regional y local. Y se utiliza en la escuela que
pertenece a una región.
En las escuelas se tiene una cultura, la cual va formando el
currículo del alumno, que va a transmite de múltiples formas;
lo cual es un hecho sustantivo a la Escuela. Los contenidos y
culturas son parte de un estricta condición lógica en la
enseñanza y el currículum es la estructuración de esa cultura
bajo claves psicopedagógicas.
El currículum viene a ser una pasarela entre la cultura y la
sociedad, digamos del exterior de la escuela con la escuela, en
la cultura de las personas con la sociedad, ante el posible
conocer.
Si el contenido cultural es la condición lógica de la
enseñanza, se va a dirigir a condiciones reales de la
enseñanza. Visto desde la trascendencia por su potencia
cognitiva y su complejidad inevitable, implica en cierta forma
algunos enfoques y tratamientos muy diversos y ser un
terreno conflictivo y polémico, pero se requiere la
sensibilidad y conocimiento psicopedagógico para superar las
barreras a presentarse. [3]
Por lo tanto por la parte psicopedagógica y hoy
concretamente en la mayoría de las escuelas mediante las
competencias, ya que si pasamos a las competencias laborales
allí se aprende pero bajo el mismo enfoque de competencias
como primera instancia.
El currículo representa de manera explícita e implícita se
conjugan una serie de concepciones ideológicas,

Journal Objetos y Objetivos Matemáticos No. 1; julio-diciembre 2019.
ISSN 2683-264X. http://joom.org.mx
© Autor(es) 2019. Artículo de acceso abierto bajo licencia CC BY-NC-ND
29
socioantropológicas, epistemológicas, pedagógicas y
psicológicas, y que tiene una orientación pedagógica,
considera desde la fundamentación a la operación para
ponerlo en práctica, y basada en la estructura académica,
administrativa, legal y económica, lo cual lo lleva a una
formalización y oficialización. Las partes que ayudan a la
formación del currículo es el Plan de estudios dicho por
Casarini.- “El plan de estudios y los programas son
documentos guías que prescriben las finalidades, contenidos
y acciones que son necesarios para llevar a cabo por parte
del maestro y sus alumnos para desarrollar un currículum”
[4]
Los planes de estudio pueden estar organizados por
asignaturas, áreas de conocimiento o módulos, se tiene la
relación con el alumno y el conocimiento, y vinculación a la
sociedad, enseñanza aprendizaje y práctica profesional. Por
otra parte los Programas de estudio. - organizan y planifican
la conformación de estudio de una materia o asignatura, área
o módulo; de tal que es la herramienta fundamental de trabajo
de los profesores.
Con base en lo manejado por Frida Diáz Barriga, aporta lo
siguiente. - “Johnson considera que el currículo es algo más
que el conjunto de las experiencias de aprendizaje, se refiere
al aprendizaje terminal del alumno como resultado de la
enseñanza. Para esta autora, el currículo especifica los
resultados que se desean obtener del aprendizaje, los cuales
deben estar estructurados previamente; de esa manera hace
referencia a los fines como resultado del aprendizaje y
sostiene que el currículo no establece los medios –es decir,
las actividades y los materiales- sino los fines.” [5] Y se
agrega que el currículo se componente de cuatro elementos:
objetivos curriculares, plan de estudios, cartas descriptivas, y
sistema de evaluación.
Mediante un conjunto de puntos clasificados se coloca en
contexto la necesidad de un conocimiento matemático que se
utiliza en diferentes ramas de la ciencia. Se revisa para
comprender la importancia e impacto de renovar las
matemáticas ante el cambio social, en los casos de resolver
problemáticas, como de la formación de los alumnos para que
logren las competencias que la sociedad actual demanda.
Fomentar mediante la presente propuesta una visión
renovada para integrar mejoras en el currículo de la
matemática, es un punto de apoyo para que exista innovación,
desarrollo y crecimiento social de los docentes y discentes.
Es prioritario enseñar a un alumno una matemática de
forma significativa, concreta y puntual para resolver
problemas actuales, y ante todo mantener en la pasarela los
casos de investigación que ayuden al desarrollo de la ciencia
y resolución de asuntos matemáticos.
Todos en lo general brindamos aportes importantes que
colocan una dificultad, o dan solución a un problema. El
alumno debe ante todo contar con capacidades, logradas, que
motiven y fundamenten, la atención que tenemos a los
procesos de interés. Iniciemos la revisión de la clasificación
de temas.
1.- Tema de álgebra y geometría
Existen hoy métodos algebraicos un poco avanzados
como es el álgebra de Kolyvagin-Flach y la teoría de
Iwasawa, que es parte primordial de la resolución de la
ecuación de más de dos grados que planteó Fermat como
irresoluble.
Existe además el tema de los fractales que explica
comportamiento en imágenes que obedecen a patrones. Y en
su entorno hay diversas teorías que dan soluciones a
problemas matemáticos.
Existen un conjunto de figuras en las cuales se hacen
aproximaciones de espacios. Y es donde la geometría no
encuentra cómo brindar una solución pertinente. El manejo de
figuras geometrías que no tiene una forma ordenada y
congruente en su estructura vuelve un tanto complicado
establecer su manejo. Y existen hoy diversidad de figuras
diversas por lo que para su analisis se requiere del uso y
aplicaciones de diversas técnicas matemáticas que permitan
tener un resultado aproximado al esperado.
2.- Tema de enfoque de sistemas para el análisis de
problemas irresolubles.
Las ciencias como la física hoy en día están proponiendo
opciones de soluciones mediante un enfoque de sistemas, en
que hay subsistemas y así otros subsistemas. Esto deriva de la
complejidad por ejemplo:
Un enfoque de sistemas implica que los subsistemas se
caracterizan por un padre e hijo, y guardan ciertas
características particulares.
Dentro de otras ramas de las ciencias, como la educación,
también un enfoque de sistemas está permeando la educación
del futuro, en que se rompa la forma actual de educar, y se integren formas basadas en el enfoque de sistemas, que
faciliten al alumno un aprendizaje.
Se muestra en contexto a la física cuántica, que mediante
otro enfoque, pretende y da solución a procesos más
avanzados de análisis.
Manejo de anillos o grupos importantes de elementos nos
lleva a un álgebra superior abstracta, ya que reclasificamos y
aplicamos patrones de la matemática pero ya con temas un
tanto de corte abstracto. Esto implica reconocer el enfoque de
sistemas y agrupaciones de elementos u objetos, para facilitar
análisis grupal.
3.- Tema de solución a problemas con tendencias a
soluciones no lineales y cálculos exhaustivos mediante
otros métodos.
Hoy existen procesos que no mantienen un
comportamiento o patrón principal, e incluso puede ser un
proceso de n variables e interacciones, para conocer un
resultado que marque pauta hacia escenarios futuros de
acción.
El enfoque de los sistemas, y la investigación de
operaciones, aportan elementos de apoyo para solucionar
problemas particulares, en el caso de la Investigación de
Operaciones es por medio de temas de tipo no lineal.
Si se optimiza al maximizar o minimizar, entonces la
investigación de operaciones con los métodos simplex y
derivados otorga un apoyo importante. En el caso de
ecuaciones de más dimensiones se vuelve complejo el
entendimiento y en cierta manera la aplicación al mundo real,
lo cual complica el entendimiento o bien la solución a un
problema. Sin embargo con el avance en la resolución de
ecuaciones como lo es el Teorema de Fermat, se vislumbra
que ahora no basta un conocimiento sustantivo que traemos,
ya que debe ser integral y focalizado para dar una visión de
que diversos elementos coadyuvan en la solución de un tema
matemático.
La mecánica cuántica contiene dentro de sí un conjunto de
valores de corte matemático, y que hoy dentro del medio de la
computación hace necesario el entendimiento del tema como
un punto a futuro para el uso de las computadoras a una

Journal Objetos y Objetivos Matemáticos No. 1; julio-diciembre 2019.
ISSN 2683-264X. http://joom.org.mx
© Autor(es) 2019. Artículo de acceso abierto bajo licencia CC BY-NC-ND
30
velocidad mayor a la que hasta el momento se conoce. Por lo
tanto el sentido lógico y la resolución a modelos matemáticos
son necesarios para los futuros profesionistas al tema de las
tecnologías de la información y la comunicación.
4.- Los Sistemas Complejos
Los sistemas complejos [6] se refieren a diversas
interacciones entre componentes físico o bien lógico, los
cuales tienen comportamientos o funcionalidades, que suelen
ser necesarios que sean explicados o relacionados a proceso
de frontera entre ciencias y disciplinas.
Generalmente la complejidad implica conocer a nivel
micro, macro o por interacciones. Dentro del cual es
importante saber el medio en el que están para conocer qué
factores afectan los procesos o comportamientos.
Los sistemas complejos tienen injerencia en la
computación, la física, la biología, economía y sociología.
Cuando hay comportamientos particulares pueden
apegarse a modelos matemáticos y técnicas de tipo de grafos,
redes, control, simulaciones, minería de datos por mencionar
algunos casos conocidos. Lo relevante en muchos casos es un
modelo matemático y su comportamiento en el ambiente de
interés, representarlo por formas matemáticas nos permite
comunicarnos y medir lo que se realiza.
En el caso del cómputo es necesario saber que vienen
cambios en la rapidez de respuesta al manejar la información
ante el modelo de la teoría cuántica. Muchas formas de
avance se dan con un enfoque diferente de atender un
conjunto de peticiones y concurrencias. Entonces enseñar a
pensar de forma lógica y con modelos matemáticos en las
diferentes áreas de apoyo que forma la matemática.
5.-Relación de la clasificación al proceso de enseñanza
aprendizaje.
El primer paso es que el docente cuente con la visión e
importancia de mejorar la forma y temas de enseñar a un
alumno, entonces implica materiales que ante el cierre de la
clase otorguen la actitud de la nueva visión curricular de un
tema a trabajar.
El profesor desplegará diversas formas de integrar
materiales como técnicas de desarrollo que den un
aprendizaje al alumno, posteriormente el alumno recibirá la
estrategia planeada, y así es como lograremos el proceso de
cambio. El alumno deberá tener la visión, y un dominio de los
temas sustantivos a su nivel educativo.
Los academicos que desarrollen e integren mejoras en el
currículo, deberán fundamentar la relación en alguna de las
cuatro clasificaciones expresadas que de forma inicial
plantemos. Sobre todo alinear la formación de la currícula a
los puntos en que se basa todo currículo en la parte
psicopedagogía, política y económica, sociológica, y la
evaluación. Además debemos justificar en la currícula
matemática el apoyo en las Tecnologías de la información y
comunicación, y alineadado a los temas de las diferentes
ramas matemáticas, justificando a cada rubro como base y
fundamento el sostén de la propuesta curricular.
6.-Psicopedagógica
Utilizar tendencias del tipo estructuralista y de
competencias. En las cuales se tiene la posibilidad de utilizar
el aprendizaje significativo, el modelo de aprendizaje basado
en resolución de problemas, de zonas de desarrollo próximo,
o bien otros aspectos esperados relacionados que faciliten el
entender de la matemática.
7.-Epistemológica
La epistemología como parte de la filosofía que estudia
los principios, fundamentos, extensión y métodos del
conocimiento humano, incluye en la matemática un conjunto
de elementos actuales en las metodologías de desarrollo de
sistemas, rumbo a la certificación de los medios utilizados, o
cual garantiza calidad, estándares y medidas cuantificables
que otorgan credibilidad, seguridad, control y seguimiento de
las prácticas instauradas.
8.-Política y económica
Dentro de la parte política, acorde al modelo que un
gobierno establece, se requiere de medidas que logren que los
medios tecnológicos no sean una dificultad que complique la
instauración del modelo deseado, a la par mantener si es el
caso la posibilidad de libertad de expresión y alcance de los
medios tecnológicos, de forma regulada sin minar intereses de
la sociedad ni de la clase política.
En la parte económica, es necesario que se logren mayores
ganancias de las organizaciones ante los bienes o servicios
que se otorguen a la sociedad, ya que la tecnología pone en la
pasarela social a sus empresas e instituciones públicas y
privadas, de tal forma que al realizarlo con mejores prácticas,
control seguimiento, manteniendo eficiencia y eficacia, es
como se logra organizaciones con ventajas competitivas que
favorecen una sociedad madura, y con formas pertinentes que
favorezcan la economía, incluso como área generar medios de
regulación.
9.-Sociológica
La finalidad de la educación es mantener un orden de
interacción social de las personas. De tal manera que los
avances tecnológicos están acercando comunidades
internacionales, y personas con intereses iguales, así como
colocar mediante la sociedad del conocimiento más
información al alcance de la sociedad que logre que las
personas hagan uso de la matemática, en un sentido
autorregulado, y que mediante las medidas que realizará un
profesionista dedicado a la matemática, ayude a que esa
interacción con personas y medios tecnológicos sea pertinente
y acorde a formas esperadas en que no se dañe en ningún
sentido, una convivencia o manejo de los medios.
Se considera que la matemática facilita y mejora la vida
en las sociedades, pero ahora será superada porque el
especialista de la matemática otorgaría mayor confianza en
los recursos desplegados en las organizaciones.
10.-Evaluación
Es la forma en que se verificará el aprendizaje esperado
del alumno. En primera instancia se plantea el manejo de
competencias dentro de las matemáticas, se visualiza en una
universidad pública o privada.
También es manejable en un modelo de universidad
técnica o bien autónoma. Se considera en un sentido a escuela
universitaria privada por lo tanto sería un modelo educativo
basado en competencias, que es la tendencia actual en la
educación en la nación y a nivel global.
Por lo tanto la evaluación toma en consideración las
prácticas de evaluación acordes a competencias mediante el
uso de rúbricas, listas de cotejo, andamios y otros mecanismo
relacionados.
11.-En el mediano plazo en la educación básica.
Dentro de la parte política y económica integro los
actuales cambios que se consideró en educación básica y que

Journal Objetos y Objetivos Matemáticos No. 1; julio-diciembre 2019.
ISSN 2683-264X. http://joom.org.mx
© Autor(es) 2019. Artículo de acceso abierto bajo licencia CC BY-NC-ND
31
no se pueden dejar de lado ya que es necesario entender el
impacto
Actualmente puede consultarse en el portal de gob.mx, en
la Secretaria de Educación Pública un cambio a la educación
en el programa de estudios, se realiza la propuesta para la
consulta de acciones de mejora, para que se instaure el
modelo en los próximos años, como se muestra en la figura 1.
El modelo educativo se basa en la escuela al centro, el
planteamiento curricular con humanismo y valores, considera
a la sociedad del conocimiento, y las oportunidades de las
ciencias de educación, contenidos educativos y ambientes de
aprendizaje.
Además toma en consideración a la formación y
desarrollo profesional docente tal es con la Reforma del
servicio profesional docente.
El modelo considera la inclusión y equidad, y la
gobernanza del sistema educativo mediante el conjunto de
instituciones y leyes que lo sustentan. [7] En el currículum de educación básica se consideraron en lo
general rasgos que son
1. Se comunica con confianza y eficiencia.
2. Desarrolla el pensamiento crítico y resuelve problemas
con creatividad.
3. Tiene iniciativa y favorece la colaboración.
4. Muestra responsabilidad por su cuerpo y por el
ambiente.
5. Posee autoconocimiento y regula sus emociones.
6. Sabe acerca de los fenómenos del mundo natural y
social.
7. Aprecia la belleza, el arte y la cultura.
8. Cultiva su formación ética y respeta la legalidad.
9. Emplea habilidades digitales de manera pertinente.
Existen 14 principios pedagógicos, y se toma en cuenta la
evaluación como parte de la planeación, pues ambas son dos
caras de la misma moneda. El ambiente de aprendizaje es un
conjunto de factores que favorecen o dificultan la interacción
social en un espacio físico o virtual determinado.
Los contenidos se basan en cuatro consignas que se
distinguen al estilo de la siguiente frase, “Esta selección
tiene en cuenta las propuestas derivadas de la
investigación educativa más pertinente, actualizada y
basada en el conocimiento de la escuela, en los estudios
acerca de cómo aprenden los niños y los adolescentes y
sobre los materiales que resultan útiles para estudiar.”
[8]
También consideran que el ejercicio para balancear la
cantidad de temas que es posible cubrir adecuadamente en el
tiempo lectivo es una tarea crítica del desarrollo curricular.
Los aprendizajes que se logran de forma significativa
permiten movilizar prácticas hacia nuevas tareas y contextos.
Y los 3 componentes curriculares, con base en las ideas
desarrolladas en los apartados anteriores, la Propuesta
curricular plantea la organización de los contenidos
programáticos en tres componentes:
1) Aprendizajes clave, 2) Desarrollo personal y social, 3)
Autonomía curricular. Y existen 3 componentes claves, en
que versa el nuevo currículum que se analiza, aprendizajes
clave, desarrollo personal y social y autonomía curricular.
Fig. 1. Aprendizajes clave. Fuente: www.gob.mx/sep
Lo anterior expresado es un puente pertinente al cual se
alinean las formas de educación de la matemática, sin
embargo es necesario revisar la propuesta concreta del
currículo para adaptar la estrategia que mantenga el aporte
comentado de una matemática renovada.
Sí en el caso de la educación básica se mantiene el cambio
propuesto por la SEP, resta aplicar con las mejores formas la
enseñanza de los temas, pero ahora con una visión de inicio
rumbo a un cambio a cada nivel educativo.
III. CONCLUSIONES
El currículo contiene: las competencias básicas,
conocimientos, habilidades y aptitudes, que se logran
mediante la implementación del plan y programa de estudios
basados en de objetivos, contenidos, criterios metodológicos
y de evaluación que los estudiantes deben alcanzar en un
determinado nivel educativo, mediante formas
epistemológicas, psicológicas, pedagógicas y sociológicas.
Cuando somos hacedores de los planes y programas que
guían y evalúan a los alumnos es vital que lo que se enseñe y
el curriculo como tal responda a preguntas tales como. - ¿qué
enseñar?, ¿cómo enseñar?, ¿cuándo enseñar? y ¿qué, ¿cómo y
cuándo evaluar?
Toda curricula debe contener a una cultura maker
colabora con el equilibrio entre economía, desarrollo social y
conservación del ambiente al revalorar la producción y el
consumo local. David Cuartielles [9] lo explica:
“Para mí, la cultura maker es poder crear, no
necesariamente máquinas, sino procesos y herramientas a
nivel de fabricación personal para hacer trabajos a
escala local; es el proceso de aprendizaje de hacer algo y
compartirlo con otra gente”.
El fin es lograr un conocimiento que genere ejercicios más
relevantes de democratización tecnológica, de herramientas y
formas de creación. Y que nos lleve a una nueva ecología del
aprendizaje [9], en que se respondan los parámetros en la
escolarización universal y la acción educativa distribuida e
interconectada, en que se dé importancia a las trayectorias
personales de aprendizaje como acceso al conocimiento de la
sociedad de la información.
Algo que debemos considerar en el currículo es la toma de
conciencia de las limitaciones de la educación escolar para
evitar que las desigualdades económicas se transformen en

Journal Objetos y Objetivos Matemáticos No. 1; julio-diciembre 2019.
ISSN 2683-264X. http://joom.org.mx
© Autor(es) 2019. Artículo de acceso abierto bajo licencia CC BY-NC-ND
32
desigualdades educativas, repudio al sistema educativo de no
preparar al alumno para su inserción en el mundo laboral, las
acusaciones de ineficacia y de baja calidad.
Hoy ante la representación de 4 casos es que logramos
clarificar una visión de otorgar una enseñanza matemática a
los alumnos con bases firmes, que facilite posteriores temas
de corte matemático para que el profesionista resuelva
problemáticas sustantivas.
Es necesario dar la visión a los docentes para que
comprendan el alcance de la matemática básica, con el fin de
que el alumno cuente con la actitud, visión, conocimiento y
habilidad matemática, ya que, al enfrentar escenarios de tipo
medio superior, superior y de investigación, mantenga un
pensar que coadyuve en su desarrollo, y por consiguiente el
de la sociedad.
Si el alumno se motiva a que la base educativa de la
matemática en los primeros años de estudio otorga en primera
instancia elementos de valor que fomenten el aprendizaje del
alumno. Es necesario reforzar la formación del alumno e
integrar cambios a la currícula matemática, para preparar a
los futuros profesionistas y que así resuelvan situaciones
futuras en los niveles educativos de educación media superior
y superior. Los puntos de apoyo para forjar la visión se han
comentado y viene a ser un primer análisis para trabajar en
los cambios que permitan contar con la curricula pertinente en
materia de matemáticas.
Las reformas educativas en México son dinámicas en los
últimos 15 años, de tal forma que han tocado a la educación
básica, bachillerato, en este caso es fundamental que la
estrategia de enseñanza aprendizaje mejore por parte del
docente y se prepare para comprender la relevancia de una
visión matemática actual que considera los cambios en la
curricula.
Los especialistas en materia de curricula, tiene un trabajo
importante a considerar e insertar elementos de valor que
consideren en la matemática puntos de apoyo hoy planteados
con la difusión de la visión para concretizarlo al currículo
interno y externo.
Un asunto pendiente es la educación superior, pero se
trabaja en la instauración de reformas y nuevas políticas al
respecto. Y otro aspecto que no denota las reformas de
manera más concreta, directa y pública es la evaluación
curricular en la parte externa y un punto de oportunidad es
que se transparente más el trabajo de evaluación externa, para
comprender y reconocer la importancia de un hecho como tal.
Finalmente es necesario distinguir que la visión de la
currícula en matemáticas debe tenerse presente para mejorar
el trabajo realizado, es imperativo, ya que un factor en contra
es el tiempo, de no integrarlo se afecta a las generaciones de
profesionistas y no se cumple en parte los fines que persigue
la formación matemática. Es un momento pertinente para
establecer mejoras y dar más elementos y capacidades a los
alumnos en la sociedad actual.
REFERENCIAS
[1] Ríos C., P. (2008). Evaluación en tiempos de cambio. Universidad Pedagógica Experimental Libertador; Instituto Pedagógico de Caracas,
Venezuela.
[2] Gimeno S, J. ¿Qué significa el currículum? [3] Ministerio de Educación nacional. (2016) Diccionario educativo.
República de Colombia.
[4] Casarini R., M. (2016) Teoría y diseño curricular. La evaluación y el currículo.
[5] Díaz Barriga, F.; Lule, M.; Pacheco, D., Saad, E., Rojas, S. Metodología
de diseño curricular para educación superior. Trillas, México, 2005, pp.
17‐20
[6] Sánchez A. (n.d.) Sistemas Complejos y Aplicaciones. Universidad Carlos III, Universidad de Zaragoza e instituto Madrileño de Estudios
Avanzados IMDEA Matemáticas.
[7] SEP (2016) El modelo educativo 2016. Recuperado el 22/08/2016 de: [8] SEP (2016) Propuesta curricular para la educación obligatoria 2016. Pág.
53
[9] Coll, C. (2013) El currículo escolar en el marco de la nueva ecología del aprendizaje.