Revista Internacional de Métodos Numéricos para … · 200 H. Hernández et al. / Rev. int....
9
Rev. int. métodos numér. cálc. diseño ing. 2015;31(3):198–206 www.elsevier.es/rimni Revista Internacional de Métodos Numéricos para Cálculo y Diseño en Ingeniería Efecto del oleaje no lineal en tanques de almacenamiento sometidos a sismos intensos H. Hernández a,∗ , A. Hernández b y G. Valdés b a Universidad Michoacana de San Nicolás de Hidalgo, Facultad de Ingeniería Civil, Edificio de Posgrado en Ingeniería Civil, CU, Morelia, Michoacán México b Universidad de Guanajuato, Facultad de Ingeniería Civil, Campus Guanajuato, Sede Belén, Guanajuato, Guanajuato, México información del artículo Historia del artículo: Recibido el 11 de diciembre de 2013 Aceptado el 17 de septiembre de 2014 On-line el 29 de mayo de 2015 Palabras clave: Oleaje no lineal Tanques cilíndricos Tanques rectangulares Respuesta sísmica Efectos hidrodinámicos no lineales r e s u m e n En este trabajo se propone una técnica numérica para el análisis sísmico de tanques rectangulares y cilín- dricos considerando los efectos hidrodinámicos no lineales. Las ecuaciones de movimiento son mapeadas de un dominio físico a un dominio computacional por medio de un cambio de variable y la solución numé- rica se obtiene por medio de diferencias finitas. El sistema de ecuaciones de segundo orden obtenido en la discretización se linealiza usando el método de Newton y se resuelve empleando el método del gradiente biconjugado. La formulación numérica se aplica en tanques sometidos a movimientos símicos registrados en la ciudad de México en septiembre de 1985. Los resultados de la respuesta están dados en términos de altura de la superficie del líquido, fuerza cortante y momento de volteo en la base de la pared; y se comparan con los obtenidos con la solución lineal. © 2013 CIMNE (Universitat Politècnica de Catalunya). Publicado por Elsevier España, S.L.U. Todos los derechos reservados. Non-linear sloshing effect on storage tanks subjected to high earthquake ground motion Keywords: Non-linear sloshing Cylindrical tanks Rectangular tanks Seismic response Non-linear hydrodynamic effects a b s t r a c t A numerical method is proposed for the seismic response analysis of rectangular and cylindrical tanks accounting for non-linear hydrodynamic effects. The equations of motion are mapped from the physical to the computational domain by means of a change of variable. The numerical solution is then obtained by means of finite differences. The system of second order equations obtained from the finite difference discretization are linearized using the Newton method and solved numerically by means of the biconju- gate gradient method. The numerical formulation was applied to study the response of tanks subjected to ground motion records from the Mexico earthquake of 19 September 1985, obtained in Mexico City. Response results are given in terms of wave height on the liquid surface, and shear force and overturning moment at the base wall, and are compared with those obtained for the linear solution. © 2013 CIMNE (Universitat Politècnica de Catalunya). Published by Elsevier España, S.L.U. All rights reserved. 1. Introducción Debido a su importancia, los tanques de almacenamiento de líquidos se consideran estructuras del grupo A, es decir, en caso de ∗ Autor para correspondencia. Correos electrónicos: [email protected], [email protected] (H. Hernández), [email protected] (A. Hernández), [email protected] (G. Valdés). la ocurrencia de un evento sísmico, estos deben permanecer funcio- nando. La falla de algún contenedor puede ocasionar contaminación atmosférica, pérdida de líquido, explosiones o da˜ nos secundarios debido a la pérdida de agua potable en caso de que la contenga. En la literatura se han reportado da˜ nos severos en tanques de almace- namiento de líquidos durante temblores como los de Alaska (1964), Nigata (1964), California (1980), Colinga (1983), Northridge (1994) [1] y Kocaeli (1999) [2]. Se observaron da˜ nos en la cubierta por la magnitud del oleaje en la superficie libre del líquido, pandeo en las paredes del tanque, da˜ no en soldaduras y roturas entre la pared http://dx.doi.org/10.1016/j.rimni.2014.09.002 0213-1315/© 2013 CIMNE (Universitat Politècnica de Catalunya). Publicado por Elsevier España, S.L.U. Todos los derechos reservados.
Transcript of Revista Internacional de Métodos Numéricos para … · 200 H. Hernández et al. / Rev. int....

Es
Ha
b
i
HRAO
POTTRE
KNCRSN
1
l
h(
0
Rev. int. métodos numér. cálc. diseño ing. 2015;31(3):198–206
www.elsev ier .es / r imni
Revista Internacional de Métodos Numéricos paraCálculo y Diseño en Ingeniería
fecto del oleaje no lineal en tanques de almacenamiento sometidos aismos intensos
. Hernándeza,∗, A. Hernándezb y G. Valdésb
Universidad Michoacana de San Nicolás de Hidalgo, Facultad de Ingeniería Civil, Edificio de Posgrado en Ingeniería Civil, CU, Morelia, Michoacán MéxicoUniversidad de Guanajuato, Facultad de Ingeniería Civil, Campus Guanajuato, Sede Belén, Guanajuato, Guanajuato, México
nformación del artículo
istoria del artículo:ecibido el 11 de diciembre de 2013ceptado el 17 de septiembre de 2014n-line el 29 de mayo de 2015
alabras clave:leaje no linealanques cilíndricosanques rectangularesespuesta sísmicafectos hidrodinámicos no lineales
r e s u m e n
En este trabajo se propone una técnica numérica para el análisis sísmico de tanques rectangulares y cilín-dricos considerando los efectos hidrodinámicos no lineales. Las ecuaciones de movimiento son mapeadasde un dominio físico a un dominio computacional por medio de un cambio de variable y la solución numé-rica se obtiene por medio de diferencias finitas. El sistema de ecuaciones de segundo orden obtenido en ladiscretización se linealiza usando el método de Newton y se resuelve empleando el método del gradientebiconjugado. La formulación numérica se aplica en tanques sometidos a movimientos símicos registradosen la ciudad de México en septiembre de 1985. Los resultados de la respuesta están dados en términosde altura de la superficie del líquido, fuerza cortante y momento de volteo en la base de la pared; y secomparan con los obtenidos con la solución lineal.
© 2013 CIMNE (Universitat Politècnica de Catalunya). Publicado por Elsevier España, S.L.U. Todos losderechos reservados.
Non-linear sloshing effect on storage tanks subjected to high earthquakeground motion
eywords:on-linear sloshingylindrical tanksectangular tankseismic responseon-linear hydrodynamic effects
a b s t r a c t
A numerical method is proposed for the seismic response analysis of rectangular and cylindrical tanksaccounting for non-linear hydrodynamic effects. The equations of motion are mapped from the physicalto the computational domain by means of a change of variable. The numerical solution is then obtainedby means of finite differences. The system of second order equations obtained from the finite differencediscretization are linearized using the Newton method and solved numerically by means of the biconju-gate gradient method. The numerical formulation was applied to study the response of tanks subjected
to ground motion records from the Mexico earthquake of 19 September 1985, obtained in Mexico City.Response results are given in terms of wave height on the liquid surface, and shear force and overturningmoment at the base wall, and are compared with those obtained for the linear solution.© 2013 CIMNE (Universitat Politècnica de Catalunya). Published by Elsevier España, S.L.U. All rights
. Introducción
Debido a su importancia, los tanques de almacenamiento deíquidos se consideran estructuras del grupo A, es decir, en caso de
∗ Autor para correspondencia.Correos electrónicos: [email protected],
[email protected] (H. Hernández), [email protected]. Hernández), [email protected] (G. Valdés).
http://dx.doi.org/10.1016/j.rimni.2014.09.002213-1315/© 2013 CIMNE (Universitat Politècnica de Catalunya). Publicado por Elsevier
reserved.
la ocurrencia de un evento sísmico, estos deben permanecer funcio-nando. La falla de algún contenedor puede ocasionar contaminaciónatmosférica, pérdida de líquido, explosiones o danos secundariosdebido a la pérdida de agua potable en caso de que la contenga. Enla literatura se han reportado danos severos en tanques de almace-namiento de líquidos durante temblores como los de Alaska (1964),
Nigata (1964), California (1980), Colinga (1983), Northridge (1994)[1] y Kocaeli (1999) [2]. Se observaron danos en la cubierta por lamagnitud del oleaje en la superficie libre del líquido, pandeo en lasparedes del tanque, dano en soldaduras y roturas entre la paredEspaña, S.L.U. Todos los derechos reservados.

umér
dpld
cdcdstcpcrdrbfiqrfldqera[mc
clpclpeyde
clLtmtdmndanpqp[dg[sZGmv
H. Hernández et al. / Rev. int. métodos n
el tanque y el anillo de cimentación, así como levantamiento de lalaca base. El sismo de Kocaeli en Turquía (1999) produjo fallas en
as conexiones de las tuberías de alimentación debidas a momentose volteo excesivos.
Los tanques para almacenar líquidos pueden construirse cononcreto armado o con acero estructural y pueden tener forma cilín-rica o rectangular y estar anclados o simplemente apoyados a laimentación, la cual se puede considerar flexible o rígida. Depen-iendo de su relación altura- radio, H/a, se clasifican como anchosi H/a ≤ 0,50 y como esbeltos cuando dicha relación es mayor. Esteipo de tanques generalmente almacenan un poco menos de suapacidad total, por lo que las presiones hidrodinámicas sobre lasaredes y el fondo son prácticamente iguales a las de un recipienteon superficie libre. Graham y Rodríguez (1952) fueron los prime-os en resolver el problema hidrodinámico linealizado para el casoe tanques de aeronaves [3]. Retomando el enfoque de los auto-es anteriores, Housner [4] propuso un procedimiento de análisisasado en un modelo masa-resorte que posteriormente fue modi-cado por Veletsos y Yang [5]. Wozniak y Michell [6] establecieronue los efectos hidrodinámicos impulsivos en tanques con paredesígidas son similares a los que presentan los tanques con paredesexibles, por lo que la diferencia en su comportamiento puede serespreciable. En la actualidad existe un gran número de referenciasue siguen usando la teoría linealizada de la condición cinemátican la superficie libre del líquido; algunos autores emplean la teo-ía del potencial [7,8], la analogía de masas concentradas [9,10] olgún software comercial basado en el método de elemento finito2,11–15]. En la práctica profesional es común que los elementos
ecánicos de diseno se calculen por medio de la analogía de masasoncentradas-resortes [16–18].
Existen diversas fuentes de no linealidad que intervienen en elomportamiento sísmico de tanques de almacenamiento: no linea-idad cinemática de la superficie libre del líquido, pandeo de lasaredes, interacción no lineal suelo-estructura, no linealidad deontacto entre la placa base y la cimentación del tanque, y no linea-idad del material de las paredes. En este trabajo se considera que lasaredes del tanque son rígidas y ancladas a la cimentación, que sencuentra sometida ante una excitación sísmica de gran intensidad,
que el líquido contenido en el recipiente tiene un comportamientoinámico no lineal debido principalmente a la ecuación cinemátican la superficie del fluido.
En diversas referencias bibliográficas se encuentra que la ecua-ión de movimiento que considera los efectos hidrodinámicos noineales se ha resuelto analíticamente o por métodos numéricos.as soluciones analíticas existentes se basan en el método de per-urbaciones [3,19,20–26], y las numéricas, principalmente, en los
étodos de elementos de frontera (MEF), y de elementos fini-os (MEF) y de diferencias finitas (MDF). En la literatura apareceniferentes algoritmos de solución basados en el llamado métodoarcador y celda (MMC) [26]. Hirt, Nichols y Romero [27] propo-
en una versión simplificada del método MAC con los algoritmose SOLA y SOLA-SURF. Durante el período de 1975 a 1981 se des-rrollaron varios algoritmos computacionales simplificados, con elombre genérico SOLA [28,29]. Ukeguchi, Sakata y Adachi [30] pro-onen el método llamado FLIC (Fluid Interaction Computer) en elue se combina el MEF con el método del volumen finito (MVF)ara calcular el flujo alrededor de un cuerpo estanco. Faltinsen31] desarrolló un método numérico para el cálculo del oleaje en 2imensiones de tanques rectangulares basado en la técnica de inte-rales en la frontera y el método del panel. Nakayama y Washizu32] aplican MEF para el análisis no lineal del oleaje en 2 dimen-iones de un contenedor rectangular. Basándose en el trabajo de
akharov [33], Miles [34,35] y Bridges y Dias [36], recientementeavrilyuk et al. [37] han resuelto el problema de estabilidad delovimiento no lineal del oleaje en tanques por medio de métodosariacionales. Actualmente el MDF se sigue usado para la solución
. cálc. diseño ing. 2015;31(3):198–206 199
del problema de oleaje no lineal en contenedores sometidos a movi-mientos de traslación y cabeceo ante cargas armónicas [38–40].
En las referencias antes citadas [3,19–40] se supone que la exci-tación en la base del tanque es de tipo armónica, es decir, del tiposeno-coseno, con pequena amplitud y corta duración. En ocasio-nes los movimientos sísmicos presentan altos niveles de excitación(> 0,2 g), tienen un periodo de duración de 20 a 60 s o mayor, y elmovimiento que presentan no es armónico, por lo que las solucio-nes planteadas dejan de ser válidas para el caso de sismos de granintensidad.
Existen pocas referencias en las que se considere el efecto nolineal del oleaje en la respuesta sísmica de tanques. Chen et al.[41] aplican la teoría de potencial y resuelven las ecuaciones demovimiento por medio del MDF en contenedores rectangularessometidos a sismos característicos de Norteamérica. Para estabi-lizar la solución numérica agregan amortiguamiento por mediode disipación numérica o viscosidad artificial, lo cual podría com-prometer la solución. En Hernández-Barrios et al. [42] tratan elproblema en tanques cilíndricos sometidos a diversos tipos deregistros sísmicos. Las ecuaciones de movimiento se discretizanpor el MDF y el método del volumen finito (MVF). Ozdemir et al.[43] desarrollaron una metodología explicita basada en el MEFcon el algoritmo Arbitrary Lagrangian-Eulerian (ALE) en tanquescilíndricos de acero anclados o no a la cimentación. En los ejem-plos presentados no utilizan registros sísmicos reales. Goudarzi ySabbagh-Yazdi [44] utilizan el software comercial ANSYS para obte-ner la solución no lineal en tanques rectangulares; sin embargo, ensus resultados no definen el valor y cómo controlan el amortigua-miento del líquido.
En este trabajo se presenta una extensión de la metodolo-gía empleada en Hernández-Barrios et al. [42] aplicada a tanquesrectangulares sometidos a sismos de gran intensidad. Se utilizanregistros sísmicos que no se utilizaron en [42]. Además, para el casode tanques cilíndricos no se usa el MVF en la discretización de lasecuaciones de frontera. Se comparan los efectos de las condicioneshidrodinámicas no lineales en la respuesta, en tanques cilíndricos yrectangulares con dimensiones geométricas comunes en la prácticaprofesional. Los resultados de la respuesta están dados en términosde altura de la superficie del líquido, fuerza cortante y momento devolteo en la base de la pared.
2. Ecuaciones de movimiento
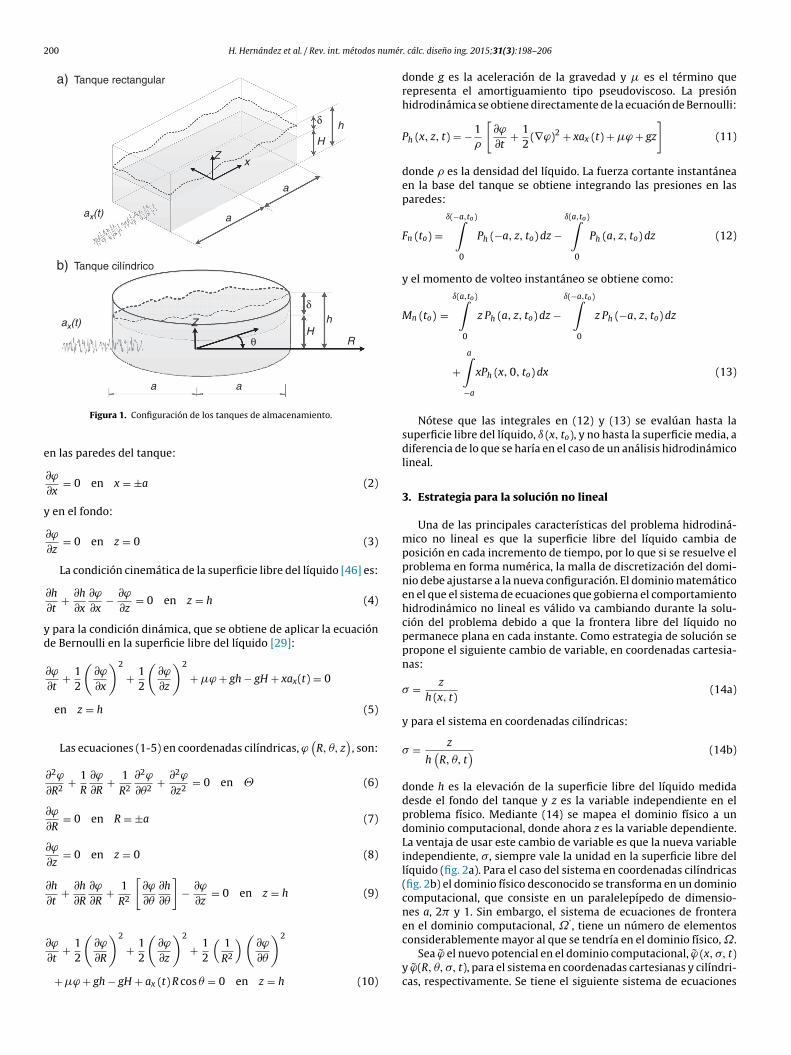
Consideremos un tanque de almacenamiento con forma rectan-gular (fig. 1a) o cilíndrica (fig. 1b) con paredes rígidas y anclado ala cimentación y que está sometido a una aceleración sísmica delterreno en su base: a (t) = ax (t). El tanque contiene un fluido ideale irrotacional, lo que permite considerar un flujo basado en la teo-ría del potencial [23], válido para movimientos de fluido cuya olano rompe. Esta hipótesis tiene el inconveniente de que es válidapara movimientos no amortiguados. En este trabajo se incluyó elamortiguamiento en la ecuación dinámica considerándolo del tipopseudoviscoso [21,29].
En la figura 1a se observa un tanque rectangular, con un anchoen su base de 2 a y profundidad del líquido H. La amplitud del oleajeen la superficie, �, se mide a partir de la superficie media del líquido.Para el tanque cilíndrico (fig. 1b) a es su radio, y para ambos casos hes la altura de ola medida desde el fondo. El sistema de ecuacionesque gobierna el comportamiento dinámico del problema para unsistema de referencia no inercial [29], en términos de un poten-cial de velocidades relativas en coordenadas cartesianas, ϕ (x, z)
[45], está dado por la ecuación de Laplace válida en el dominio dellíquido, ˝:∇2ϕ = 0 en (1)
200 H. Hernández et al. / Rev. int. métodos numér
δ
δ
θ
h
H
a
aax(t)
ax(t)
xZ
Z
a a
hH
R
Tanque rectangular
Tanque cilíndrico
a)
b)
e
y
yd
Figura 1. Configuración de los tanques de almacenamiento.
n las paredes del tanque:
∂ϕ
∂x= 0 en x = ±a (2)
en el fondo:
∂ϕ
∂z= 0 en z = 0 (3)
La condición cinemática de la superficie libre del líquido [46] es:
∂h
∂t+ ∂h
∂x
∂ϕ
∂x− ∂ϕ
∂z= 0 en z = h (4)
para la condición dinámica, que se obtiene de aplicar la ecuacióne Bernoulli en la superficie libre del líquido [29]:
∂ϕ
∂t+ 1
2
(∂ϕ
∂x
)2
+ 12
(∂ϕ
∂z
)2
+ �ϕ + gh − gH + xax(t) = 0
en z = h (5)
Las ecuaciones (1-5) en coordenadas cilíndricas, ϕ(
R, �, z)
, son:
∂2ϕ
∂R2+ 1
R
∂ϕ
∂R+ 1
R2
∂2ϕ
∂�2+ ∂2ϕ
∂z2= 0 en � (6)
∂ϕ
∂R= 0 en R = ±a (7)
∂ϕ
∂z= 0 en z = 0 (8)
∂h
∂t+ ∂h
∂R
∂ϕ
∂R+ 1
R2
[∂ϕ
∂�
∂h
∂�
]− ∂ϕ
∂z= 0 en z = h (9)
( )2 ( )2 ( )( )2
∂ϕ∂t+ 1
2∂ϕ
∂R+ 1
2∂ϕ
∂z+ 1
21R2
∂ϕ
∂�
+ �ϕ + gh − gH + ax (t) R cos � = 0 en z = h (10)
. cálc. diseño ing. 2015;31(3):198–206
donde g es la aceleración de la gravedad y � es el término querepresenta el amortiguamiento tipo pseudoviscoso. La presiónhidrodinámica se obtiene directamente de la ecuación de Bernoulli:
Ph (x, z, t) = − 1�
[∂ϕ
∂t+ 1
2(∇ϕ)2 + xax (t) + �ϕ + gz
](11)
donde � es la densidad del líquido. La fuerza cortante instantáneaen la base del tanque se obtiene integrando las presiones en lasparedes:
Fn (to) =ı(−a,to)∫
0
Ph (−a, z, to) dz −ı(a,to)∫
0
Ph (a, z, to) dz (12)
y el momento de volteo instantáneo se obtiene como:
Mn (to) =ı(a,to)∫
0
z Ph (a, z, to) dz −ı(−a,to)∫
0
z Ph (−a, z, to) dz
+a∫
−a
xPh (x, 0, to) dx (13)
Nótese que las integrales en (12) y (13) se evalúan hasta lasuperficie libre del líquido, ı (x, to), y no hasta la superficie media, adiferencia de lo que se haría en el caso de un análisis hidrodinámicolineal.
3. Estrategia para la solución no lineal
Una de las principales características del problema hidrodiná-mico no lineal es que la superficie libre del líquido cambia deposición en cada incremento de tiempo, por lo que si se resuelve elproblema en forma numérica, la malla de discretización del domi-nio debe ajustarse a la nueva configuración. El dominio matemáticoen el que el sistema de ecuaciones que gobierna el comportamientohidrodinámico no lineal es válido va cambiando durante la solu-ción del problema debido a que la frontera libre del líquido nopermanece plana en cada instante. Como estrategia de solución sepropone el siguiente cambio de variable, en coordenadas cartesia-nas:
� = z
h (x, t)(14a)
y para el sistema en coordenadas cilíndricas:
� = z
h(
R, �, t) (14b)
donde h es la elevación de la superficie libre del líquido medidadesde el fondo del tanque y z es la variable independiente en elproblema físico. Mediante (14) se mapea el dominio físico a undominio computacional, donde ahora z es la variable dependiente.La ventaja de usar este cambio de variable es que la nueva variableindependiente, �, siempre vale la unidad en la superficie libre dellíquido (fig. 2a). Para el caso del sistema en coordenadas cilíndricas(fig. 2b) el dominio físico desconocido se transforma en un dominiocomputacional, que consiste en un paralelepípedo de dimensio-nes a, 2 y 1. Sin embargo, el sistema de ecuaciones de fronteraen el dominio computacional, ˝’, tiene un número de elementos
considerablemente mayor al que se tendría en el dominio físico, ˝.Sea ϕ el nuevo potencial en el dominio computacional, ϕ (x, �, t)y ϕ(R, �, �, t), para el sistema en coordenadas cartesianas y cilíndri-cas, respectivamente. Se tiene el siguiente sistema de ecuaciones

H. Hernández et al. / Rev. int. métodos numér
Z
Hh
x
a
aR
Ra
z
σ
δ
H h
θ2π
1
a a
a a
Sistema en coordenadas cartesianas
a)
b)
p
t
yimplícito [47]. El sistema de ecuaciones no lineales se resolvió pormedio del método de Newton. El éxito de este método depende deque la condición inicial de la iteración de las raíces sea próxima
Sistema en coordenadas cilíndricas
Figura 2. Dominio físico y dominio computacional.
ara el tanque rectangular:
∂2ϕ
∂x2− �
(∂ ϕ
∂�
)(1h
)(∂2h
∂x2
)+ 2�
(∂ ϕ
∂�
)(1h2
)(∂h
∂x
)2
+
+�2
(∂2ϕ
∂�2
)(1h2
)(∂h
∂x
)2
+(
∂2ϕ
∂�2
)(1h2
)
−2�(
1h
)∂h
∂x
∂2ϕ
∂x∂�= 0 en ˝′
(15)
∂ ϕ
∂�= 0 en � = 0 (16)
∂ ϕ
∂x= �
∂ ϕ
∂�
(1h
)∂h
∂xen x = ±a (17)
La condición cinemática de la superficie libre del líquido seransforma en:
∂h
∂t= ∂ ϕ
∂�
(1h
)[1 +
(∂h
∂x
)2]
− ∂ ϕ
∂x
∂h
∂xen � = 1 (18)
la dinámica:
∂ ϕ
∂t= −g (h − H) − 1
2
(∂ ϕ
∂x
)2
+ 12
(∂ ϕ
∂�
)2 (1h2
)[1 +
(∂h
∂x
)2]
+ � ϕ + xax (t) (19)
. cálc. diseño ing. 2015;31(3):198–206 201
La presión en las paredes se obtiene con:
PH
�= −∂ ϕ
∂t− 1
2
(∂ ϕ
∂x
)2
+ ∂ ϕ
∂�
[∂h
∂t+ ∂ ϕ
∂x
∂h
∂x
]�
h− 1
2
(∂ ϕ
∂�
1h
)2
−
− 12
(∂ ϕ
∂�
∂h
∂x
�
h
)2
− � ϕ − xax (t) − g (�h − H) (20)
Para el tanque con forma cilíndrica las ecuaciones se transfor-man en:
∂2ϕ
∂R2+ 1
R
∂ ϕ
∂R+ 1
R2
∂2ϕ
∂�2− �
(∂ ϕ
∂�
)(1h
)[∂2h
∂R2+ 1
R
∂h
∂R+ 1
R2
∂2h
∂�2
]+
+2�
(∂ ϕ
∂�
)(1h2
)[(∂h
∂R
)2
+ 1R2
(∂h
∂�
)2]
+�2
(∂2ϕ
∂�2
)(1h2
)[(∂h
∂R
)2
+ 1R2
(∂h
∂�
)2]
+
+∂2ϕ
∂�2
(1h2
)− 2�
(1h
)∂h
∂R
∂2ϕ
∂R∂�
−2�(
1h
)(1R2
)∂h
∂�
∂2ϕ
∂�∂�= 0 en ˝′
(21)
∂ ϕ
∂�= 0 en � = 0 (22)
∂ ϕ
∂R= �
∂ ϕ
∂�
(1h
)∂h
∂Ren R = a (23)
la condición cinemática:
∂h
∂t= ∂ ϕ
∂�
(1h
)[1 +
(∂h
∂R
)2
+ 1R2
(∂h
∂�
)2]
− ∂ ϕ
∂R
∂h
∂R− 1
R2
(∂ ϕ
∂�
) (∂h
∂�
)en � = 1 (24)
y la dinámica:
∂ ϕ
∂t= −g (h + H) − 1
2
(∂ ϕ
∂R
)2
− 12
(1R2
)(∂ ϕ
∂�
)2
+12
(∂ ϕ
∂�
)2 (1h2
)[1 +
(∂h
∂R
)2
+(
1R2
)(∂h
∂�
)2]
−
−� ϕ − ax (t) R cos � en � = 1
(25)
Las ecuaciones (15-19) y (21-25) forman los 2 nuevos sistemasde ecuaciones de frontera en el dominio computacional. El sistemade ecuaciones no lineales se resuelve utilizando el MDF. El esquematemporal utilizado para la solución del sistema de ecuaciones es elde Crank-Nicholson, por considerarse estable para la mayoría de losregistros sísmicos empleados. El esquema de Crank-Nicholson estácentrado en el espacio y en el tiempo, lo que lo hace incondicional-mente estable, además de tener poco amortiguamiento numérico
a la raíz verdadera; esta consideración se toma en cuenta en lasolución no lineal del oleaje considerando que el cambio numé-rico de la respuesta entre 2 intervalos de tiempo es continua ypequena; además, el incremento temporal de los registros sísmicos,

2 umér. cálc. diseño ing. 2015;31(3):198–206
cg
ep
4
atr(eedpCasesdsgyroloc
cem0edrnlo
Fd
0 20 40 60 80 100 120 140 160 180Tiempo (s)
0 20 40 60 80 100 120 140 160 180Tiempo (s)
1
0.6
0.2
-0.2
–0.6
–1
Altu
ra d
e ol
a h/
hmáx
1
0.6
0.2
-0.2
–0.6
–1
Altu
ra d
e ol
a h/
hmáx
Lineal No Lineal
Lineal No Lineal
Registro sísmico CA.EW
Registro sísmico CA,NS
a)
b)
Figura 4. Historia de la altura de ola (a = 5,5 m, H = 2,75 m, � = 0,5%), tanque rectan-gular.
Tabla 1Altura de ola máxima (m) lineal y no lineal en la pared de los tanques (H/a = 0.35)
Registro sísmico Tanque cilíndrico Tanque rectangularLineal No lineal � (%) Lineal No lineal � (%)
CU.NS 0,2605 0,2801 7 0,4164 0,4043 −3CU.EW 0,3205 0,3348 4 0,3047 0,3745 22VIV.NS 0,3761 0,4144 10 0,4523 0,4974 10VIV.EW 0,3728 0,3855 3 0,3022 0,3534 17SCT.NS 0,9996 1,0907 13 1,4125 1,8867 34SCT.EW 1,2287 1,3070 6 1,9227 2,5476 33
02 H. Hernández et al. / Rev. int. métodos n
t, es suficientemente pequeno. El sistema de ecuaciones algebrai-as simultáneas resultantes se resolvió por medio del método delradiente biconjugado (MGB) [48].
La discretización del sistema de ecuaciones (15-19) se muestran el Appendix Aapéndice A, y la estrategia de la solución temporalara el sistema de ecuaciones (21-25), en el Appendix Bapéndice B.
. Respuesta sísmica
Considerando un tanque cilíndrico que contiene agua con radio = 5,5 m, altura media del líquido H = 2,75 m y un valor del amor-iguamiento de � = 0,5%, sometido en su base al evento sísmicoegistrado en Central de Abasto (CA), en las direcciones este-oesteEO) y norte-sur (NS) durante el sismo de septiembre de 1985, enl Valle de México. El periodo fundamental del líquido contenidon el tanque es de T = 4,06 s. En la figura 3 se muestra la historiae la altura de ola normalizada al valor máximo obtenido. No fueosible calcular la altura de ola máxima generada con el registroA.EO (fig. 3a) después del segundo 81,05 del registro. Esto se debe
que la excitación tiene un periodo característico de T = 3,93 s, casiimilar al periodo del líquido, por lo que se puede estar presentandol fenómeno de resonancia [41]. En algunas referencias [3,19–40]e reportan resultados similares cuando la excitación en la baseel tanque es del tipo armónica con frecuencia próxima a la delistema dinámico. Para estabilizar la solución es necesario agre-ar amortiguamiento numérico, lo cual no se consideró adecuadoa que se compromete la solución del problema. Para el caso delegistro CA.NS, con periodo característico de T = 3,81 s, la altura dela máxima obtenida con la solución no lineal es de 1,74 m, y cona solución lineal resultó de 2,60 m. En este caso, la altura de olabtenida con la solución lineal resultó ser mayor que la obtenidaon la solución no lineal.
Ahora se considera un tanque rectangular con la misma rela-ión H/a que el tanque cilíndrico y sometido en su base al mismovento sísmico (CA). El tanque tiene un semiancho a = 5,5 m, alturaedia del líquido H = 2,75 m y un valor del amortiguamiento del
,5%. El periodo fundamental del líquido contenido en el tanques de T = 4,63 s. En la figura 4 se muestra la historia de la alturae ola normalizada al valor máximo obtenido. Cuando se aplica elegistro sísmico CA.EO en la base del tanque (fig. 4a), la solución
o lineal predice un valor de altura de ola de 1,36 m y la soluciónineal de 1,06 m. En este caso la solución no lineal resultó ser delrden del 28% mayor que la altura de ola con la solución linealizada
1
0.6
0.2
-0.2
–0.6
–1
1
0.6
0.2
-0.2
–0.6
–1
0 20 40 60 80 100 120 140 160 180
Tiempo (s)
0 20 40 60 80 100 120 140 160 180
Tiempo (s)
Altu
ra d
e ol
a h/
hmáx
Altu
ra d
e ol
a h/
hmáx
Lineal No Lineal
Lineal No Lineal
Registro sísmico CA.EW
a)
b)
Registro sísmico CA,NS
igura 3. Historia de la altura de ola (a = 5,5 m, H = 2,75 m, � = 0,5%), tanque cilín-rico.
TACY.NS 0,4551 1,098 25 0,2686 0,3292 23TACY.EW 0,2862 0,3398 19 0,3853 0,4866 26
del problema. Para el caso de registro sísmico CA.NS, la historia deola se muestra en la figura 4b. Para este caso no fue posible calcularla altura de ola con la solución no lineal después del segundo 110del registro. Esto ocurre porque a partir de ese tiempo se presentainestabilidad numérica, debido a que el sistema se encuentra encuasi resonancia, así como al bajo valor del amortiguamiento dellíquido, lo que físicamente significa que la altura de ola es grandey tiende a romper. La solución numérica se logra estabilizar si alsistema se le agrega amortiguamiento externo por medio de disipa-ción numérica o viscosidad artificial. Existen varios métodos paraagregar disipación numérica al sistema. El más usado es el cono-cido como «upwind» [47], pero en este trabajo no se agregó para nocomprometer la exactitud de la solución.
Como segundo caso de aplicación se consideró un tanque rec-tangular y uno cilíndrico, ambos con una relación H/a = 0,35, dondepara el tanque rectangular a es el semiancho y para el tanque cilín-drico a es el radio. El periodo fundamental del líquido contenido enel tanque cilíndrico es de T = 5,5 s, y el del tanque rectangular, deT = 6,34 s.
En la tabla 1 se muestran los resultados de la altura de olamáxima obtenida con la solución lineal y con la solución no lineal,cuando los tanques son sometidos a los eventos sísmicos registra-dos en el Valle de México durante el sismo de septiembre de 1985,en sus direcciones NS y EO. Los registros sísmicos empleados son elregistrado en terreno duro de Ciudad Universitaria (CU), el obtenidoen suelo de transición en la estación Viveros (VIV) y los obtenidos
en suelo considerado como blando: en la Secretaría de Comuni-caciones y Transportes (SCT) y en Tacubaya (TACY). Para ambasconfiguraciones de los tanques, la altura de ola calculada con la
H. Hernández et al. / Rev. int. métodos numér
Tabla 2Fuerza cortante máxima (kN) lineal y no lineal en la pared del tanque (H/a = 0,35)
Registro sísmico Tanque cilíndrico Tanque rectangular
Lineal No lineal � (%) Lineal No lineal � (%)
CU.NS 45,76 51,98 14 44,46 45,15 2CU. EW 26,92 28,41 6 41,51 41,24 −1VIV.NS 51,22 55,35 8 45,20 45,70 1VIV. EW 38,20 46,89 23 41,13 41,42 1SCT.NS 128,08 144,22 13 56,37 55,16 −3SCT. EW 143,84 144,51 3 55,42 56,20 2TACY.NS 74,53 111,60 50 44,68 42,13 −6TACY. EW 51,36 65,25 28 41,52 45,62 10
Tabla 3Momento de volteo máximo (kN m) lineal y no lineal, en la pared del tanque
Registrosísmico Tanque cilíndrico Tanque rectangular
Lineal No lineal � (%) Lineal No lineal � (%)
CU.NS 184,62 223,17 21 94,16 130,11 38CU.EW 99,99 118,76 19 84,55 114,32 35VIV.NS 199,54 235,69 18 97,62 133,96 37VIV.EW 153,94 205,23 33 82,60 118,26 40SCT.NS 503,83 768,73 52 146,23 178,48 22SCT.EW 597,08 787,54 32 146,40 198,13 35
tnSocdlc
lnept1mr
mEldy
5
tdatcldscp
+ (k2 + k3) ϕi,j+1 + k4ϕi+1,j+1 − k4ϕi−1,j+1 = 0
para i ∈ [2, imax −1] , j ∈ [2, jmax −1]
x
1
i =1 i = 2 i = 3j = jmáx
i = imáxσ
∆x
j = 3
j = 2
j = 1
∆σ
TACY.NS 292,80 514,85 76 94,88 117,95 24TACY.EW 202,47 286,31 41 83,75 132,94 58
eoría lineal es menor que la altura de ola calculada con la teoríao lineal; para el caso del tanque rectangular los registros sísmicosCT y TACY son los más desfavorables, subestimándose la altura dela hasta en un 34%. Para el tanque cilíndrico la altura de ola cal-ulada con la teoría lineal es subestimada en un 25% para el casoel registro TACY.NS. Subestimar la altura de ola en el cálculo de
a respuesta sísmica puede ocasionar derramamiento de líquido,ontaminación ambiental, explosiones o pérdida de agua potable.
En la tabla 2 se compara la fuerza cortante máxima en la pared deos tanques cilíndrico y rectangular, con las características mencio-adas. Se puede ver que el efecto no lineal del oleaje es despreciablen la cuantificación de la fuerza cortante en el tanque rectangularara los movimientos sísmicos empleados, excepto para el regis-ro TACY.EO, cuya diferencia entre las soluciones es del orden del0%. Para el caso del tanque cilíndrico la fuerza cortante no lineal esucho más importante, principalmente para los eventos sísmicos
egistrados en terreno blando (SCT y TACY).En la tabla 3 se muestran los resultados del momento de volteo
áximo obtenidos con los registros sísmicos antes mencionados.n este caso, para ambas configuraciones de tanques los efectos noineales del oleaje son importantes en la respuesta, de manera queespreciarlos puede ocasionar danos en las paredes de los tanques
fallas estructurales en las mismas.
. Conclusiones
Se presenta una metodología numérica para cuantificar los efec-os de la no linealidad del oleaje en la respuesta sísmica de tanquese almacenamiento con forma cilíndrica y rectangular, sometidos
eventos sísmicos intensos con larga duración y periodo carac-erístico grande. Los registros sísmicos empleados en este trabajoorresponden a los que se registraron en septiembre de 1985, ena Ciudad de México, que tienen una duración de 180 s, amplitu-
es del orden de 0,169 g, con frecuencias dominantes que puedener cercanas a la frecuencia fundamental del oleaje de los tanqueson dimensiones convencionales en la infraestructura civil. La res-uesta hidrodinámica no lineal se compara con la solución lineal. cálc. diseño ing. 2015;31(3):198–206 203
tradicional en cuanto a las fuerzas cortantes, momento de volteo yaltura de ola.
Es posible que para tanques con dimensiones usuales en la prác-tica profesional (a = 5,5 m y H = 2,75 m) que almacenen líquidoscon bajos valores de amortiguamiento se presente el fenómenode resonancia cuando son excitados por registros sísmicos con lascaracterísticas que se presentan en el Valle de México. Para lostanques con relación H/a = 0,35, la altura de ola calculada con lateoría no lineal resulta ser mayor que la calculada con la teoríalineal. Subestimar la altura de ola en el cálculo de la respuesta sís-mica puede ocasionar derramamiento de líquido, contaminaciónambiental, explosiones o pérdida de agua potable. El efecto no linealdel oleaje puede considerarse despreciable en la cuantificación dela fuerza cortante en el tanque rectangular; para el caso del tanquecilíndrico la fuerza cortante no lineal es más importante, princi-palmente para los eventos sísmicos registrados en terreno blando(SCT.NS y TACY). Los momentos de volteo en la base del tanquecalculándolos con la teoría lineal son subestimados para ambas con-figuraciones de tanques, llegando a ser del orden de un 58% mayorespara el tanque rectangular y de un 76% para el tanque cilíndrico.
Agradecimientos
Se agradece a la Universidad Michoacana de San Nicolás deHidalgo quien, por medio de la Coordinación de la InvestigaciónCientífica y de la Facultad de Ingeniería Civil, proporcionó las facili-dades para la realización de este trabajo. De igual forma, se agradecea la Dirección General de Apoyo al Personal Académico (DGAPA)de la UNAM por el apoyo brindado a través del proyecto PAPIITIT101513 «Riesgo Sísmico del Municipio de Naucalpan».
Apéndice A.
En la figura A1 se muestra el dominio matemático en el que sediscretizaron las ecuaciones en diferencias finitas de segundo ordenpara el caso del tanque rectangular.
La ecuación (15) se aproxima por medio de diferencias finitas desegundo orden como: rectangular.
−2 (k1 + k2) ϕi,j + k1ϕi+1,j + k1ϕi−1,j + (k2 − k3) ϕi,j−1
−k4ϕi+1,j−1 + k4ϕi−1,j−1(A1)
a a
Figura A1. Discretización por medio de diferencias finitas para el tanque rectangu-lar.

2 umér
c
d
msyr
(B2)
04 H. Hernández et al. / Rev. int. métodos n
La ecuación (19), válida en la superficie libre del líquido, se dis-retiza como:
(1 + k5) ϕn+1i,j
+ k6
[(ϕi+1,j
)2 − 2 ϕi+1,j + ϕi−1,j
]∣∣∣n+1+
+k7
[9(
ϕi,j
)2 − 24 ϕi,jϕi,j−1 + 6 ϕi,jϕi,j−2 + 16(
ϕi,j−1
)2
−8 ϕi,j−1ϕi,j−2 +(
ϕi,j−2
)2]∣∣∣n+1
=
(1 − k5) ϕni,j
− k5[ϕi+1,j − ϕi−1,j
]2∣∣∣n
− k7(
ϕi,j − 4 ϕi,j−1 + ϕi,j−2
)2∣∣∣n
−
−�tx
(ax(t)n+1 + ax(t)n
2
)− �tg
2
(hn − H
)− �tg
2
(hn+1
i− H
)
(A2)
La altura de ola (18) se puede aproximar como:(A3)
hi +(
hi+1 − hi−1
2�x
)(ϕi+1,j − ϕi−1,j
2�x
)�t
2
−[(
hi+1 − hi−1
2�x
)2
+ 1
](3 ϕi,j − 4 ϕi,j−1 + ϕi,j−2
2��
)�t
2hi
∣∣∣∣∣n+1
=
hi −(
hi+1 − hi−1
2�x
)(ϕi+1,j − ϕi−1,j
2�x
)�t
2
+[(
hi+1 − hi−1
2�x
)2
+ 1
](3 ϕi,j − 4 ϕi,j−1 + ϕi,j−2
2��
)�t
2hi
∣∣∣∣∣n
para i ∈ [2, imax −1] , j = jmaxonde:
k1 = 1
(�x)2
k2 = 1
(��)2h2i
[�2
(hi+1 − hi−1
2�x
)+ 1
]
k3 = �
2hi��
[2hi
(hi+1 − hi−1
2�x
)2
−(
hi+1 − 2hi + hi−1
(�x)2
)]
k4 = �
2hi�x��
(hi+1 − hi−1
2�x
)k5 = �t
2�
k6 = �t
16(�x)2
k7 = �t
16(��)2(hn+1i
)2
[(hn+1
i+1 − hn+1i−1
2�x
)+ 1
]
k8 = �t
16(��)2(hni
)2
[(hn
i+1 − hni−1
2�x
)+ 1
]−3hi + 4hi+1 − hi+2 = 0 en i = 1
3hi − 4hi−1 + hi−2 = 0 en i = imax
El sistema de ecuaciones no lineales se resolvió por medio del
étodo de Newton. Las primeras derivadas de estas ecuacionese pueden calcular analíticamente para formar la matriz jacobiana la solución del sistema de ecuaciones lineales simultáneas queesultan durante el proceso se resolvió por medio del MGB.
. cálc. diseño ing. 2015;31(3):198–206
Apéndice B.
Para obtener la solución temporal usando el esquema Crank-Nicholson, la condición dinámica equivalente (25) se discretiza dela siguiente forma:
(g1)j,k,1n+1 = −Uj,k,1
[2
�tg
] [1 + ��t
2
]−
[1
2g
][∂ ϕ
∂R
]2
−[
12g
][1
R2j
][∂ ϕ
∂�
]2
+
+[
12g
][1
h2j,k
][∂ ϕ
∂�
]2
+[
12g
][1
h2j,k
][∂ ϕ
∂�
]2[∂h
∂R
]2
+
+[
12g
][1
R2j
] [1
h2j,k
][∂ ϕ
∂�
]2[∂h
∂�
]2
− hj,k
∥∥∥∥∥n+1
− f n1 ( ϕ, h) = 0
(B1)
donde:
f n1 (ϕ, h) = −Uj,k,1
[2
�tg
] [1 − ��t
2
]
+[
12g
][∂ ϕ
∂R
]2
+[
12g
][1
R2j
][∂ ϕ
∂�
]2
−
−[
12g
][1
h2j,k
][∂ ϕ
∂�
]2
−[
12g
][1
h2j,k
][∂ ϕ
∂�
]2[∂h
∂R
]2
−
[1
2g
][1
R2j
][1
h2j,k
][∂ ϕ
∂�
]2[∂h
∂�
]2
− hj,k − 2H
∥∥∥∥∥n
+2Rj
gcos �[ax (t)]n+1/2
Una vez conocidos los valores de hnj,k
y de Unj,k,1, que representan
la aproximación de ϕ, el término f n1 ( ϕ, h) definido por la expresión
B2 es una constante. Al discretizarse la ecuación B1 en diferenciasfinitas para cada uno de los puntos del dominio, se convierte enuna ecuación algebraica no lineal de segundo orden cuyas deri-vadas parciales, con respecto a las variables espaciales, se puedenevaluar en forma analítica para formar la matriz jacobiana utilizadaen el método de Newton. De manera similar la ecuación cinemáticaequivalente se puede escribir:
(g2)j,k,1n+1=hj,k−
[�t
2
][1
hj,k
] [∂ ϕ
∂�
]−
[�t
2
][1
hj,k
] [∂ ϕ
∂�
] [∂h
∂R
]2
−
−[
�t
2
][1
R2j
][1
hj,k
] [∂ ϕ
∂�
] [∂h
∂�
]2
+[
�t
2
][∂ ϕ
∂R
] [∂h
∂R
]
+[
�t
2
][1
R2j
][∂ ϕ
∂�
] [∂h
∂�
]∥∥∥∥∥n+1
−
−f n2 ( ϕ, h) = 0
(B3)
donde:
f n2 (ϕ, h) =hj,k +
[�t
2
][1
hj,k
][∂ ϕ
∂�
]+
[�t
2
][1
hj,k
][∂ ϕ
∂�
][∂h
∂R
]2
+
+[
�t
2
][1
R2j
][1
hj,k
] [∂ ϕ
∂�
] [∂h
∂�
]2
−[
�t
2
][∂ ϕ
∂R
] [∂h
∂R
]
−[
�t
2
][1
R2j
][∂ ϕ
∂�
] [∂h
∂�
]∥∥∥∥∥n
(B4)
H. Hernández et al. / Rev. int. métodos numér. cálc. diseño ing. 2015;31(3):198–206 205
i =1i = 2i = 3
k =1= M θ
k = (M θ – 1)
∆θ
∆σ
∆R
∆θ
j = 1k = 6
j = 3
k = 5k = 4
k = 3
k = 2j = 1 j = 3 j = MR k = 1 = M θ
k = (M θ – 1)
k = 3
k = 2
k = 1 = M θj =1 j = 3
∆Rj = MR
i = MZj = MR
ción d
cc
(
y
(
dm
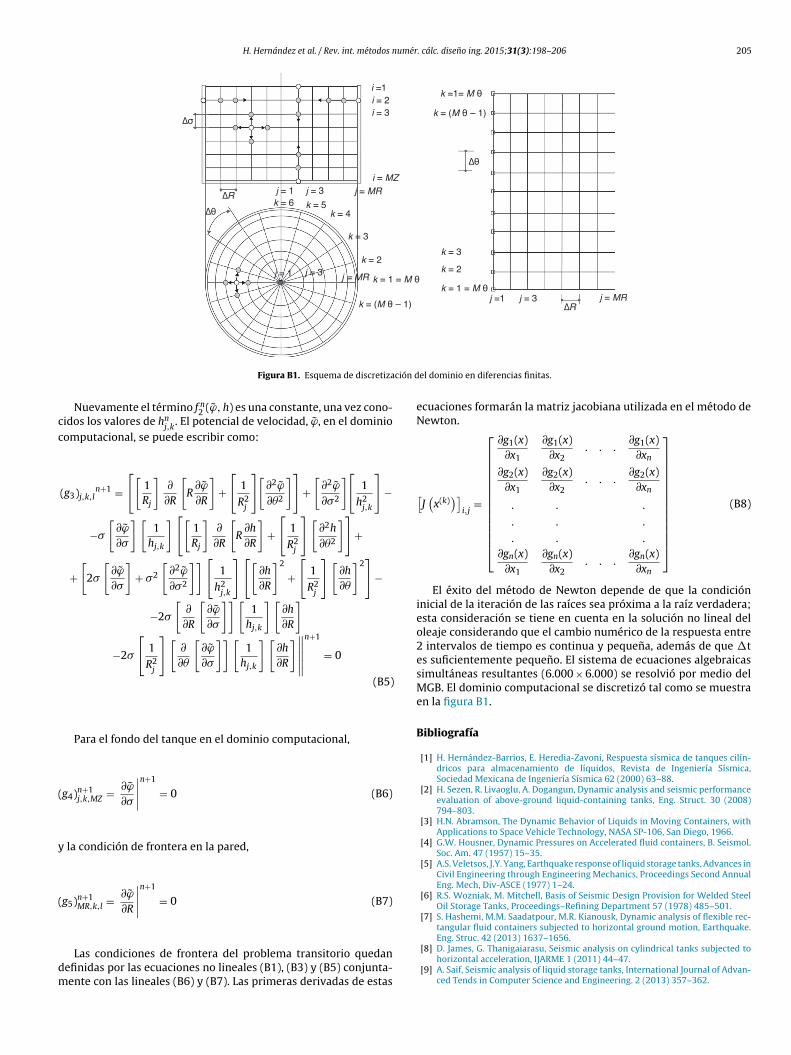
Figura B1. Esquema de discretiza
Nuevamente el término f n2 ( ϕ, h) es una constante, una vez cono-
idos los valores de hnj,k
. El potencial de velocidad, ϕ, en el dominioomputacional, se puede escribir como:
(g3)j,k,ln+1 =
[[1Rj
]∂
∂R
[R
∂ ϕ
∂R
]+
[1
R2j
][∂2ϕ
∂�2
]]+
[∂2ϕ
∂�2
][1
h2j,k
]−
−�
[∂ ϕ
∂�
] [1
hj,k
][[1Rj
]∂
∂R
[R
∂h
∂R
]+
[1
R2j
][∂2h
∂�2
]]+
+[
2�
[∂ ϕ
∂�
]+ �2
[∂2ϕ
∂�2
]][1
h2j,k
] [[∂h
∂R
]2
+[
1
R2j
][∂h
∂�
]2]
−
−2�
[∂
∂R
[∂ ϕ
∂�
]] [1
hj,k
] [∂h
∂R
]
−2�
[1
R2j
][∂
∂�
[∂ ϕ
∂�
]] [1
hj,k
] [∂h
∂R
]∥∥∥∥∥n+1
= 0
(B5)
Para el fondo del tanque en el dominio computacional,
g4)n+1j,k,MZ = ∂ ϕ
∂�
∣∣∣∣n+1
= 0 (B6)
la condición de frontera en la pared,
g5)n+1MR,k,l = ∂ ϕ
∂R
∣∣∣∣n+1
= 0 (B7)
Las condiciones de frontera del problema transitorio quedanefinidas por las ecuaciones no lineales (B1), (B3) y (B5) conjunta-ente con las lineales (B6) y (B7). Las primeras derivadas de estas
el dominio en diferencias finitas.
ecuaciones formarán la matriz jacobiana utilizada en el método deNewton.
[J(
x(k))]
i,j=
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
∂g1(x)∂x1
∂g1(x)∂x2
. . .∂g1(x)
∂xn
∂g2(x)∂x1
∂g2(x)∂x2
. . .∂g2(x)
∂xn
. . .
. . .
. . .
∂gn(x)∂x1
∂gn(x)∂x2
. . .∂gn(x)
∂xn
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
(B8)
El éxito del método de Newton depende de que la condicióninicial de la iteración de las raíces sea próxima a la raíz verdadera;esta consideración se tiene en cuenta en la solución no lineal deloleaje considerando que el cambio numérico de la respuesta entre2 intervalos de tiempo es continua y pequena, además de que tes suficientemente pequeno. El sistema de ecuaciones algebraicassimultáneas resultantes (6.000 × 6.000) se resolvió por medio delMGB. El dominio computacional se discretizó tal como se muestraen la figura B1.
Bibliografía
[1] H. Hernández-Barrios, E. Heredia-Zavoni, Respuesta sísmica de tanques cilín-dricos para almacenamiento de líquidos, Revista de Ingeniería Sísmica,Sociedad Mexicana de Ingeniería Sísmica 62 (2000) 63–88.
[2] H. Sezen, R. Livaoglu, A. Dogangun, Dynamic analysis and seismic performanceevaluation of above-ground liquid-containing tanks, Eng. Struct. 30 (2008)794–803.
[3] H.N. Abramson, The Dynamic Behavior of Liquids in Moving Containers, withApplications to Space Vehicle Technology, NASA SP-106, San Diego, 1966.
[4] G.W. Housner, Dynamic Pressures on Accelerated fluid containers, B. Seismol.Soc. Am. 47 (1957) 15–35.
[5] A.S. Veletsos, J.Y. Yang, Earthquake response of liquid storage tanks, Advances inCivil Engineering through Engineering Mechanics, Proceedings Second AnnualEng. Mech, Div-ASCE (1977) 1–24.
[6] R.S. Wozniak, M. Mitchell, Basis of Seismic Design Provision for Welded SteelOil Storage Tanks, Proceedings–Refining Department 57 (1978) 485–501.
[7] S. Hashemi, M.M. Saadatpour, M.R. Kianousk, Dynamic analysis of flexible rec-tangular fluid containers subjected to horizontal ground motion, Earthquake.
Eng. Struc. 42 (2013) 1637–1656.[8] D. James, G. Thanigaiarasu, Seismic analysis on cylindrical tanks subjected tohorizontal acceleration, IJARME 1 (2011) 44–47.
[9] A. Saif, Seismic analysis of liquid storage tanks, International Journal of Advan-ced Tends in Computer Science and Engineering. 2 (2013) 357–362.
2 umér
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
06 H. Hernández et al. / Rev. int. métodos n
10] Y. Li, J. Wang, A supplementary, exact solution of an equivalent mechanicalmodel for sloshing fluid in rectangular tank, J. Fluid. Struct. 31 (2012) 147–151.
11] U. Chaduvula, D. Patel, N. Gopalakrishnan, Fluid-structure-soil interactioneffects on seismic behaviour of elevated water tanks, Procedia Eng. 51 (2013)84–91.
12] M. Mirzabozorg, M.A. Hariri, R. Nateghi, Free surface sloshing effects on dyna-mic response of rectangular storage tanks, Am. J. Fluid. Dyn. 2 (4) (2012) 23–30.
13] M.R. Kianoush, A.R. Ghaemmaghami, The effect of earthquake frequency con-tent on the seismic behavior of concrete rectangular liquid tanks using thefinite element method incorporating soil-structure interaction, Eng. Struct. 33(2011) 2186–2200.
14] M. Moslemi, M.R. Kianoush, W. Pogorzelski, Seismic response of liquid-filledelevated tanks, Eng. Struct. 33 (2011) 2074–2084.
15] Z. Yang, B. Shou, L. Sun, J. Wang, Earthquake response analysis of spherical tankswith seismic isolation, Procedia Eng. 14 (2011) 1879–1886.
16] EN 1998-4 Eurocode 8, Design of structures for earthquake resistance, Part 4:Silos, Tanks and pipelines, 2006.
17] IITK-GSMA Guidelines for seismic design of liquid storage tanks-provisionswith commentary and explanatory examples, Indian Institute of Technology,Kapur, 2005.
18] American Petroleum Institute, API 650, Welded Tanks for Oils storage, 11thedition, Addendum 3, October, 2012.
19] H.F. Harlow, J.E. Welch, Numerical calculation of time-dependent viscousincompressible flow of fluid with free surface, Phys. Fluids 8 (12) (1965)2182–2189.
20] R.E. Hutton, An Investigation of Resonant, Nonlinear Nonplanar Free SurfaceOscillations of a Fluid, NASA TN D-1870, 1963.
21] O.M. Faltinsen, A nonlinear Theory of Sloshing in rectangular tanks, J. Ship. Res.18 (4) (1974) 224–241.
22] S. Froydis, Analytical and Numerical Studies of Sloshing in Tanks, NorgesTeknisk-Naturvitenskapelige, Univ. Trondheim, Norway, 1995.
23] F.T. Dodge, The New Dynamic Behavior of Liquids in Moving Containers, South-west Research Institute, San Antonio, Texas, 2000, NASA SP-106.
24] R.A. Ibrahim, Liquid Sloshing Dynamics, Theory and Applications, CambridgeUniversity Press, 2005.
25] H. Zhang, W. Peing-fei, L. Wen-bai, The analysis of second-order sloshing reso-nance in a 3-D tank, J. Hidrodyn. 26 (2) (2014) 309–315.
26] H.F. Harlow, J.E. Welch, Numerical study of large-amplitude free-surfacemotions, Phys. Fluids 9 (5) (1966) 842–851.
27] C.W. Hirt, B.D. Nichols, N.C. Romero, SOLA: A Numerical Solution Algorithm forTransient Fluid Flows, Los Alamos Scientific Laboratory Report LA-5852, 1975.
28] C.W. Hirt, SOLA. A Basic Solution Algorithm for Flow Analysis, Applications ofSOLA to Free Surface Flows, Von Karman Institute for Fluid Dynamics, Lecture
Series 1986-07, Introduction to Numerical Solution of Industrial Flows, 1986,pp. 12–16.29] H. Hernández-Barrios, Análisis sísmico no lineal de tanques cilíndricos de alma-cenamiento [Ph. D. thesis], DEPFI, Facultad de Ingeniería, Universidad NacionalAutónoma de México, México, 2003.
[
[
. cálc. diseño ing. 2015;31(3):198–206
30] N. Ukeguch, H. Sakata, T. Adachi, On the numerical analysis of compressibleflow problems by the modified flic method, Comput. Fluids 8 (1980) 251–263.
31] O.M. Faltinsen, A numerical nonlinear method of sloshing in tanks with two-dimensional flow, J. Ship. Res. 22 (3) (1978) 193–202.
32] T. Nakayama, K. Washizu, The boundary element method applied to the analysisof two-dimensional nonlinear sloshing problems, Int. J. Numer. Meth. Eng. 17(1981) 1631–1646.
33] V.E. Zakharov, Stability of periodic waves on finite amplitude on the surface ofa deep fluid, J. Appl. Mech. Technol. Phys. 9 (1968) 190–194.
34] J.W. Miles, Stability of forced oscillations of a spherical pendulum, Quart. Appl.Math. 20 (1962) 21–32.
35] J.W. Miles, Surface waves in basins of variable depth, J. Fluid. Mech. 152 (1985)379–389.
36] T.J. Bridges, F. Dias, An analysis of two-dimensional water waves based on O2
symmetry, Nonlinear Analysis, Theory, Methods and Applications 14 (1990)733–764.
37] I.P. Gavrilyuk, I.A. Lukovsky, A.N. Timokha, Linear and nonlinear sloshing in acircular conical tank, Fluid. Dyn. Res. 37 (2005) 399–429.
38] B. Chen, R. Nokes, Time-independent finite difference analysis of fully non-linear and viscous sloshing in a rectangular tank, J. Comput. Phys. 209 (2005)47–81.
39] C. Wu, B. Chen, Sloshing waves and resonance modes of fluid in a 3 Dtank by a time-independent finite difference method, Ocean Eng. 36 (2009)500–510.
40] W. Chih-Hua, B. Chen, H. Tin-Kan, Hydrodynamic forces induced by transientsloshing in a 3 D rectangular due to oblique horizontal excitation, Comput.Math. Appl. 65 (2013) 1163–1186.
41] W. Chen, M.A. Haroun, F. Liu, Large amplitude liquid sloshing in seismicallyexcited tanks, Earthquake Eng. Struc. 25 (1996) 653–669.
42] H. Hernández-Barrios, E. Heredia-Zavoni, A.A. Aldama-Rodríguez, Nonlinearsloshing response of cylindrical tanks subjected to earthquake ground motion,Eng. Struct. 29 (2007) 3364–3376.
43] Z. Ozdemir, M. Souli, Y.M. Fahjan, Application of nonlinear fluid-structures inte-raction methods to seismic analysis of anchored and unanchored tanks, Eng.Struct. 32 (2010) 409–423.
44] M.A. Goudarzi, S.R. Sabbagh-Yazdi, Investigation of nonlinear sloshingeffects in seismically excited tanks, Soil Dynam. Earthquake Eng. 43 (2012)355–365.
45] A. Hernández, Análisis sísmico no-lineal de tanques rectangulares [MS the-sis], Facultad de Ingeniería, Universidad Michoacana de San Nicolás de Hidalgo,México, 2012.
46] B. Le Méhauté, An Introduction to Hydrodynamics and Water Waves, Springer-Verlag, New York, 1976.
47] Thomas J.W. Numerical partial differential equations, Finite Difference Met-hods, Text in Applied Mathematics, Vol. 22, Springer, 1998.
48] W.H. Press, S.A. Teukolosky, W.T. Vettering, B.P. Flannery, Numerical Recipes inFortran, The Art of Scientific Computing, 2 nd ed, Cambridge University Press,1992.








![T E S I S · 2017-04-06 · 2 Estructura cristalina del Hierro: (a) H ierro α y δ (BCC) y (b) Hierro γ (FCC). 3 3 Diagrama esquemátic o de la clasificación de H ierro [7]. 4](https://static.fdocuments.es/doc/165x107/5e8b7031470ed143fb7aec59/t-e-s-i-s-2017-04-06-2-estructura-cristalina-del-hierro-a-h-ierro-y-bcc.jpg)