
Segmentación del ciclo de instrucción - UNLP · William Stallings, Organización y Arquitectura...
39
Segmentación del ciclo de instrucción William Stallings, Organización y Arquitectura de Computadores, Capítulo 11: Estructura y función de la CPU. John Hennessy – David Patterson, Arquitectura de Computadores – Un enfoque cuantitativo 1a Edición Capítulos 5 y 6 (4a Edición, Apéndice A)
Transcript of Segmentación del ciclo de instrucción - UNLP · William Stallings, Organización y Arquitectura...
Segmentación del ciclo de instrucción
William Stallings, Organización y Arquitectura de Computadores, Capítulo 11: Estructura y función de la CPU.
John Hennessy – David Patterson, Arquitectura de Computadores – Un enfoque cuantitativo 1a Edición
Capítulos 5 y 6 (4a Edición, Apéndice A)
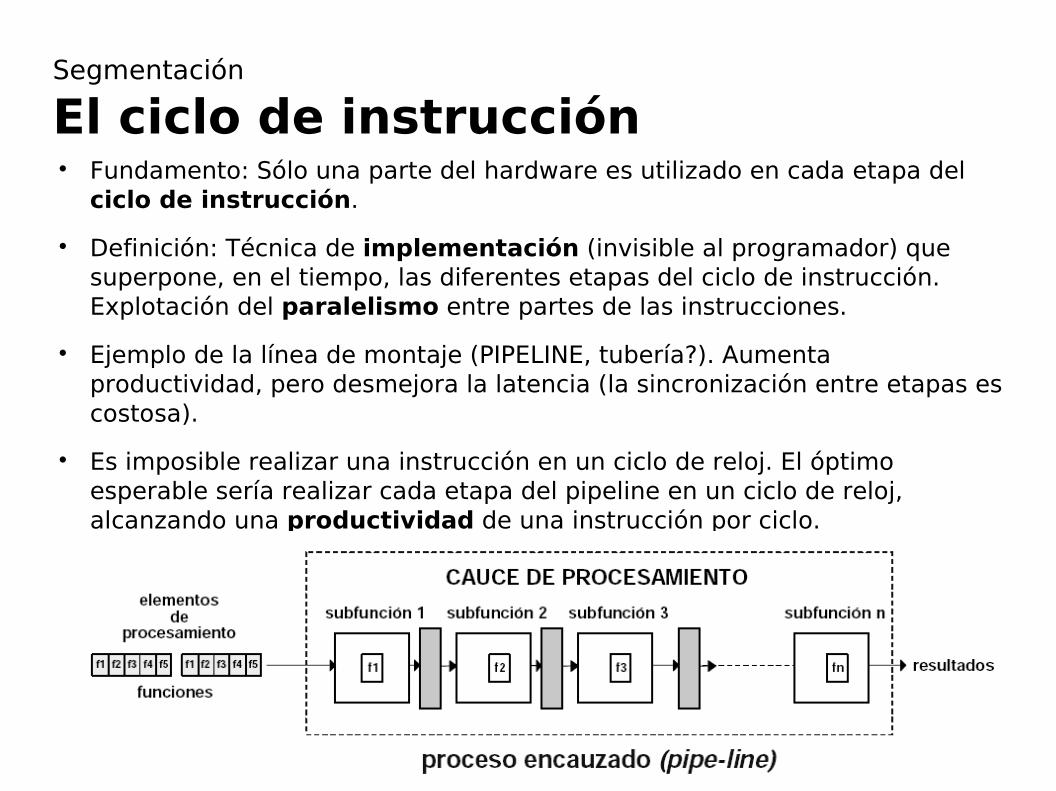
Fundamento: Sólo una parte del hardware es utilizado en cada etapa del ciclo de instrucción.
Definición: Técnica de implementación (invisible al programador) que superpone, en el tiempo, las diferentes etapas del ciclo de instrucción. Explotación del paralelismo entre partes de las instrucciones.
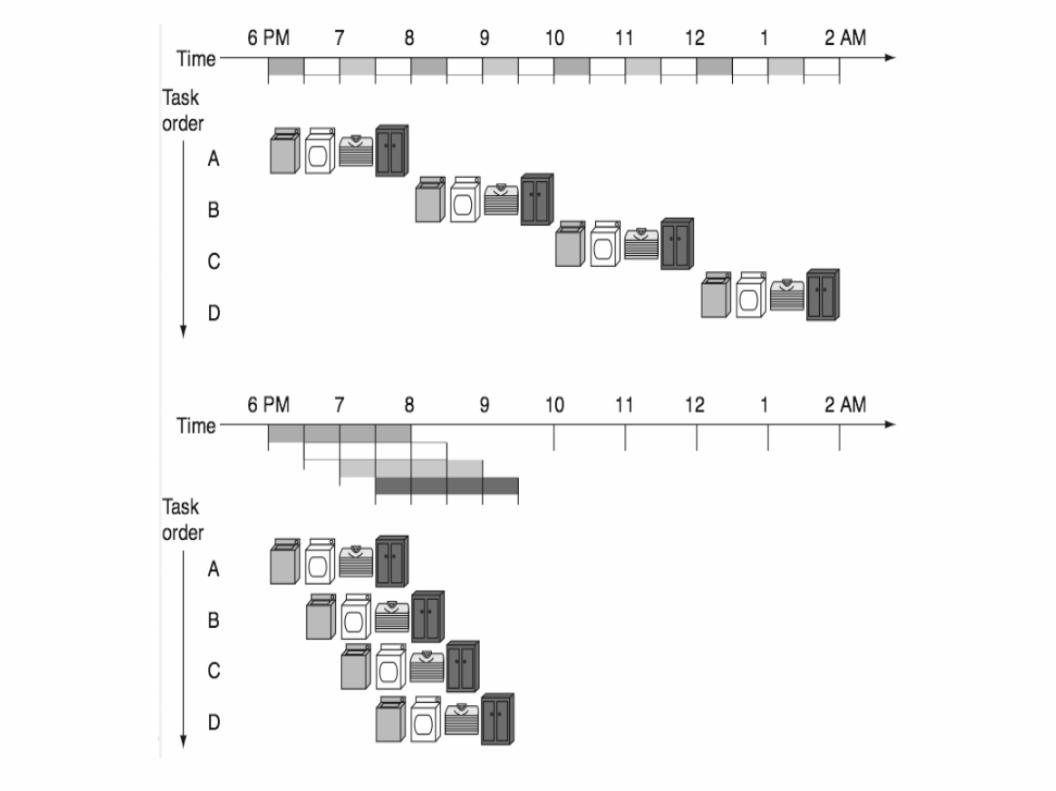
Ejemplo de la línea de montaje (PIPELINE, tubería?). Aumenta productividad, pero desmejora la latencia (la sincronización entre etapas es costosa).
Es imposible realizar una instrucción en un ciclo de reloj. El óptimo esperable sería realizar cada etapa del pipeline en un ciclo de reloj, alcanzando una productividad de una instrucción por ciclo.
Segmentación
El ciclo de instrucción
Segmentación
El ciclo de instrucción
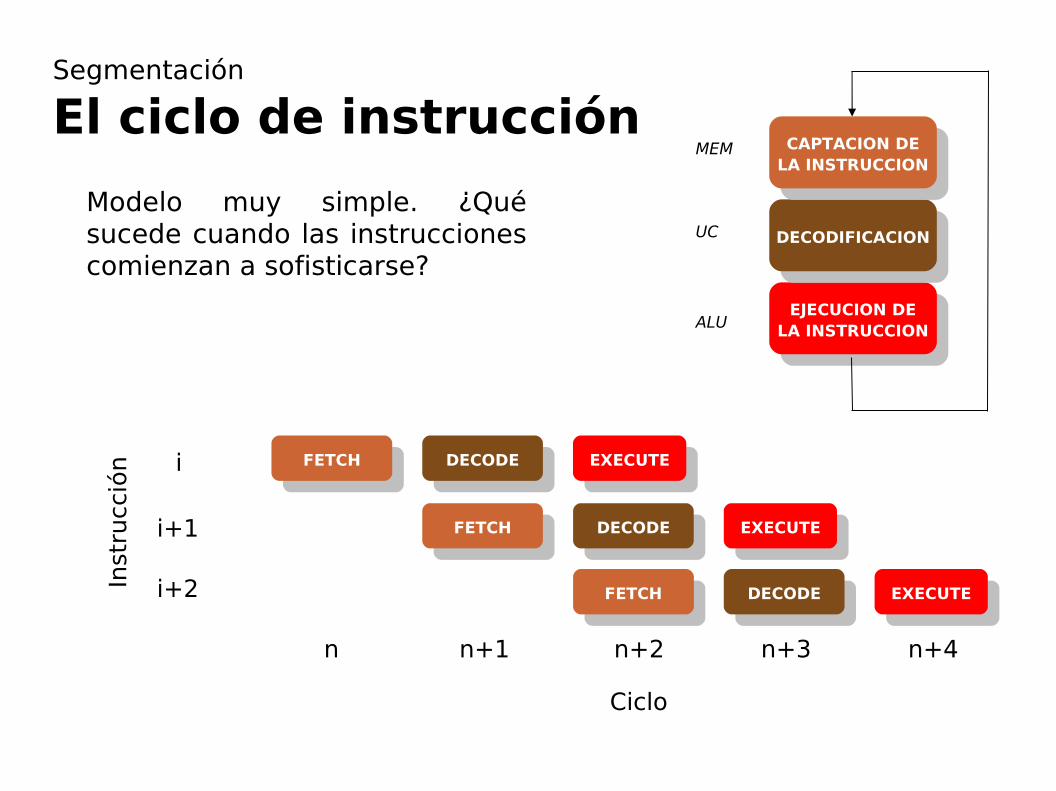
FETCH DECODE EXECUTE
MEM
ALU
UC
EJECUCION DELA INSTRUCCION
DECODIFICACION
CAPTACION DELA INSTRUCCION
FETCH DECODE EXECUTE
FETCH DECODE EXECUTE
Inst
rucc
ión i
i+1
i+2
Ciclo
n n+1 n+2 n+3 n+4
Modelo muy simple. ¿Qué sucede cuando las instrucciones comienzan a sofisticarse?
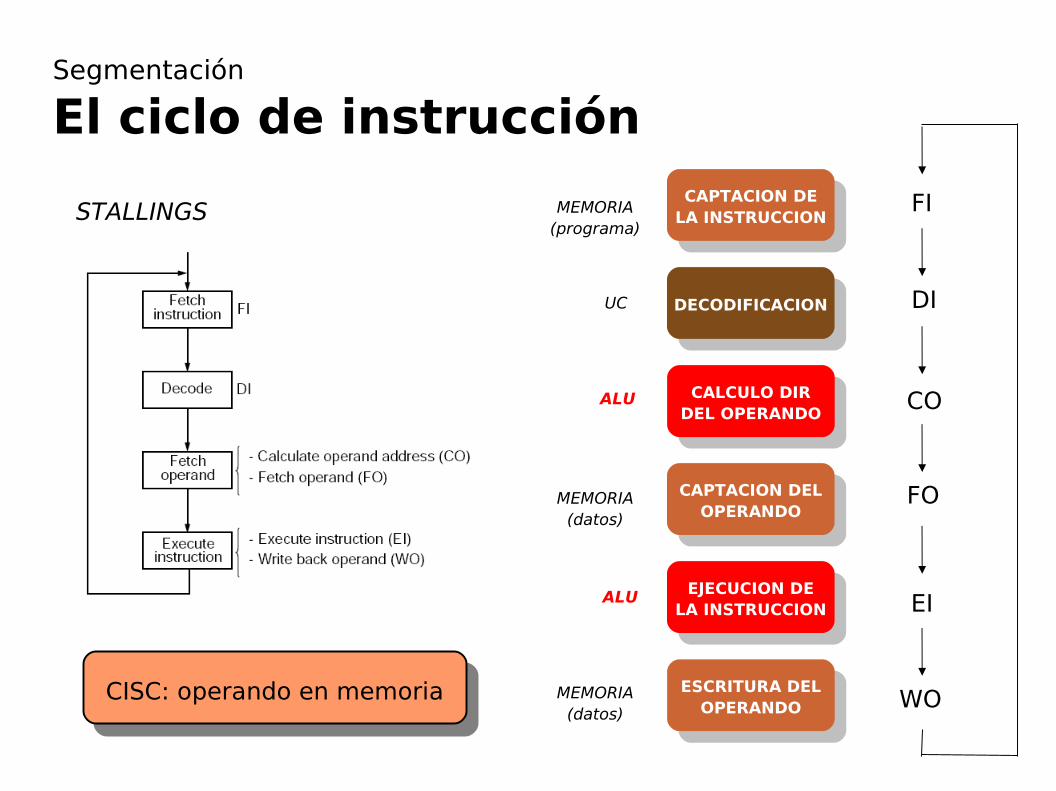
Segmentación
El ciclo de instrucciónCAPTACION DE
LA INSTRUCCION
DECODIFICACION
CAPTACION DELOPERANDO
EJECUCION DELA INSTRUCCION
CALCULO DIRDEL OPERANDO
ESCRITURA DELOPERANDO
MEMORIA(datos)
MEMORIA(datos)
MEMORIA(programa)
ALU
ALU
UC
FI
DI
CO
FO
EI
WO
STALLINGS
CISC: operando en memoria
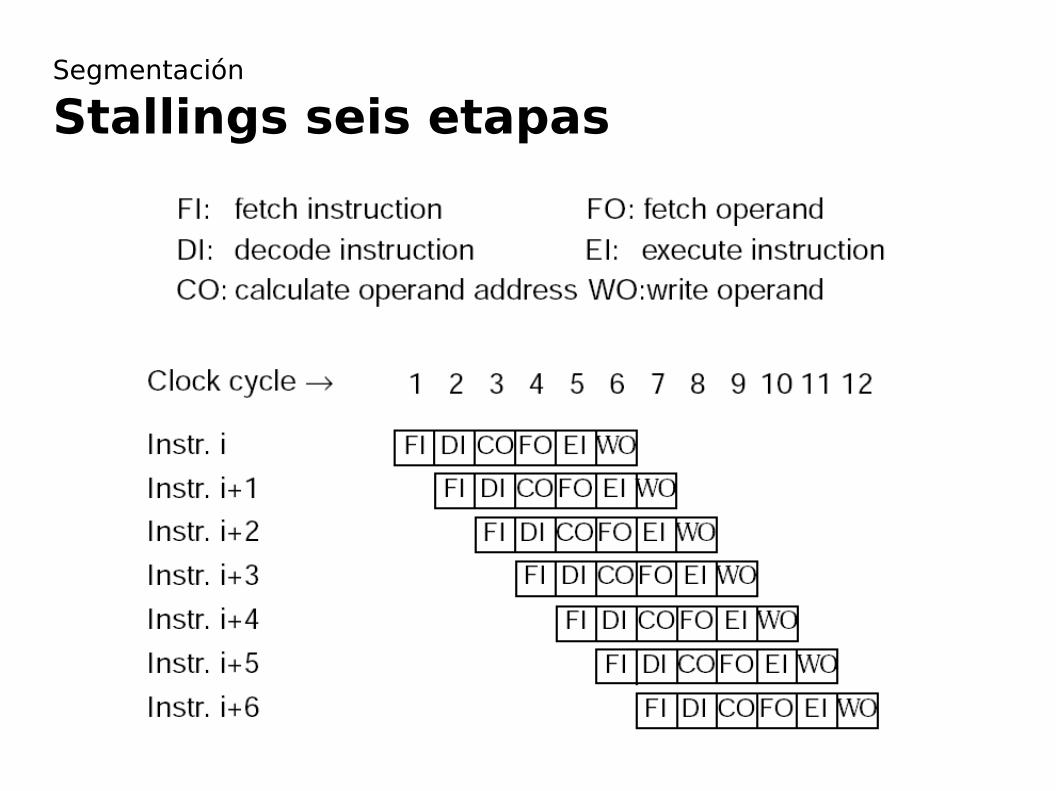
Segmentación
Stallings seis etapas
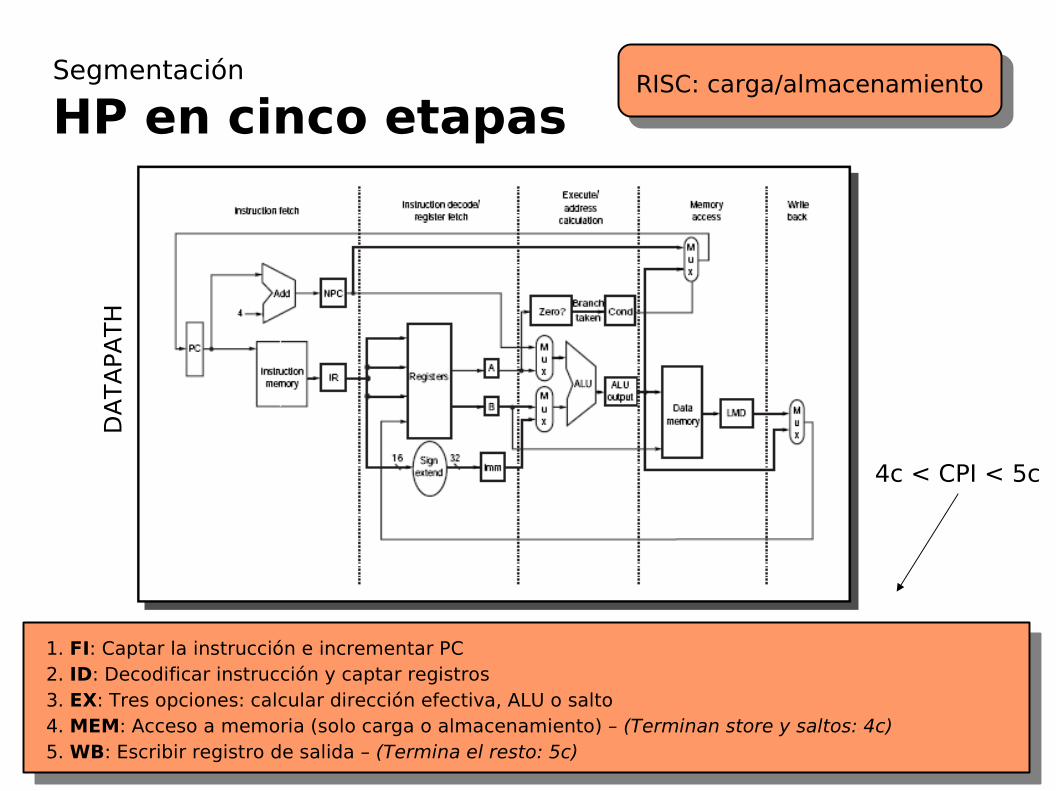
Segmentación
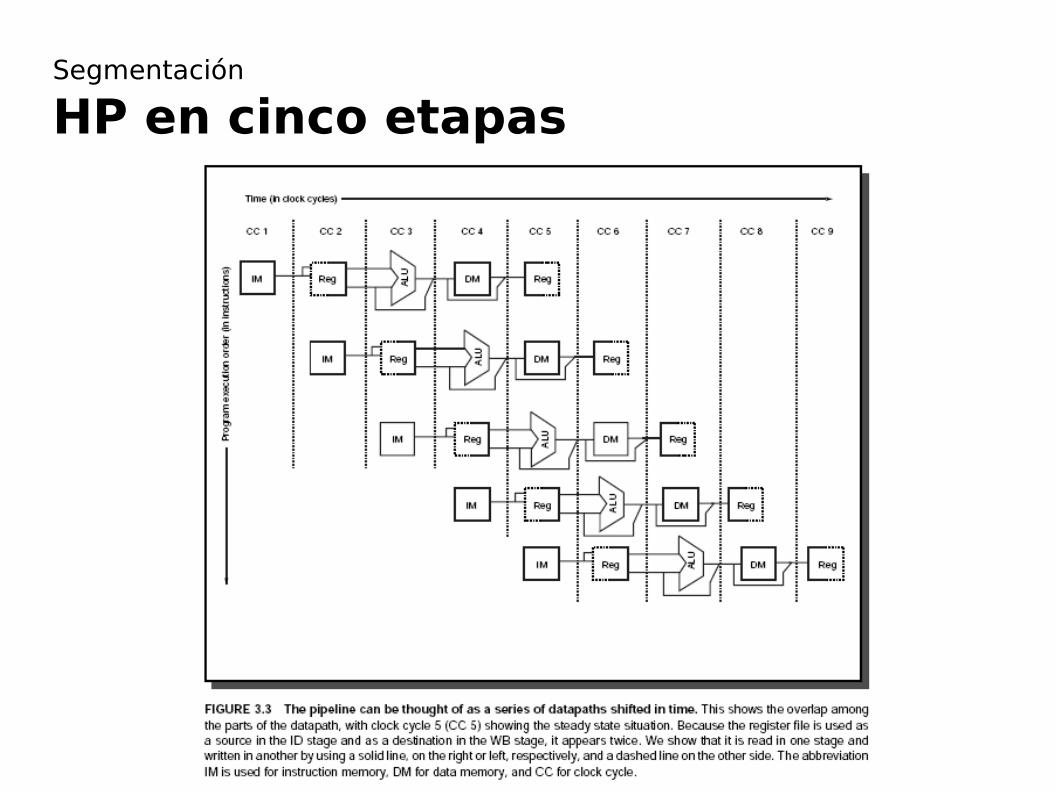
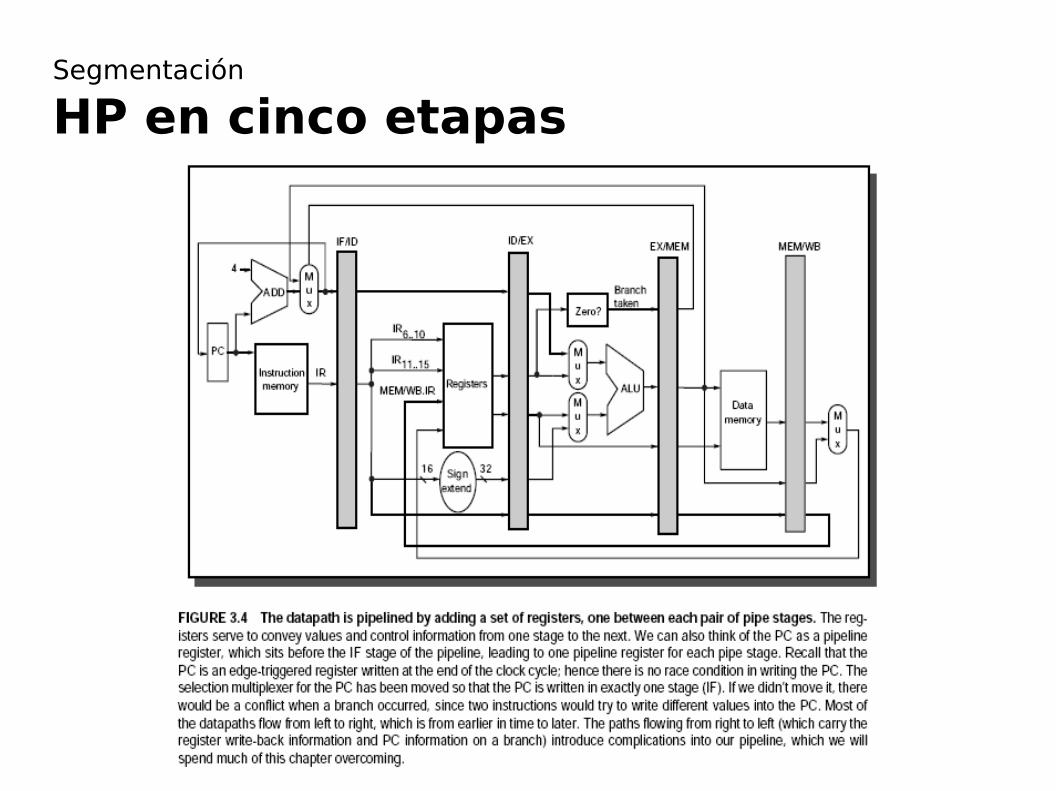
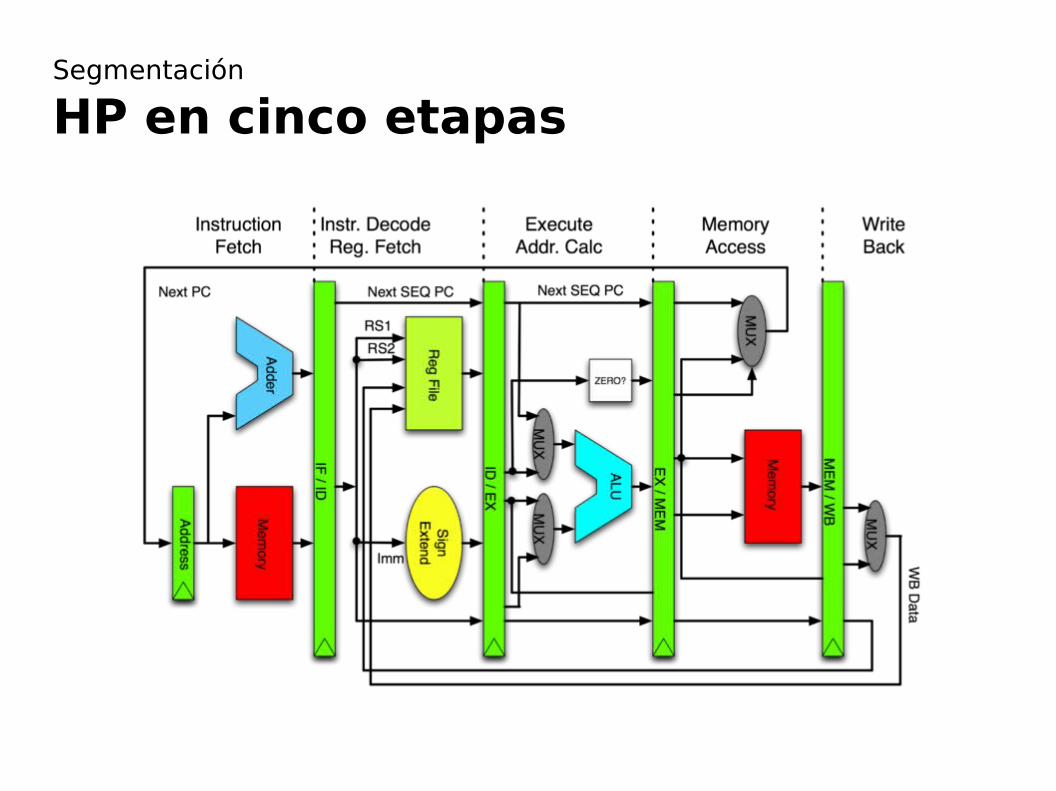
HP en cinco etapasRISC: carga/almacenamiento
1. FI: Captar la instrucción e incrementar PC 2. ID: Decodificar instrucción y captar registros 3. EX: Tres opciones: calcular dirección efectiva, ALU o salto 4. MEM: Acceso a memoria (solo carga o almacenamiento) – (Terminan store y saltos: 4c) 5. WB: Escribir registro de salida – (Termina el resto: 5c)
4c < CPI < 5c
DA
TA
PA
TH
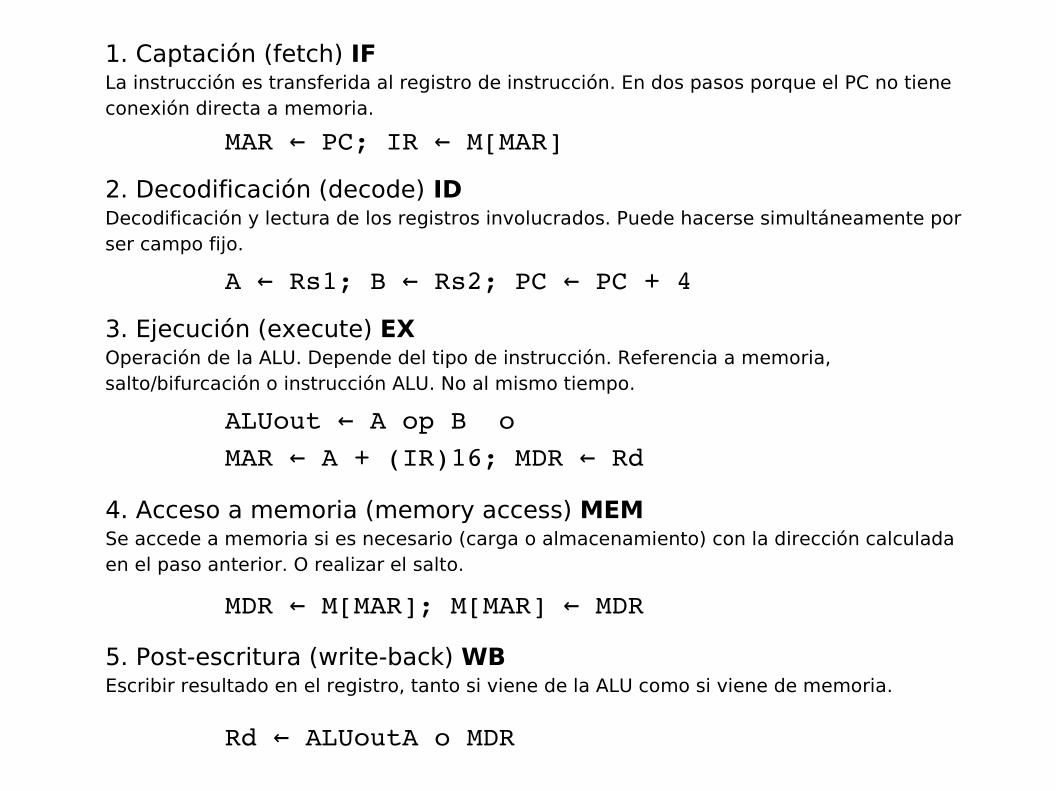
MAR PC; IR M[MAR]← ←
1. Captación (fetch) IFLa instrucción es transferida al registro de instrucción. En dos pasos porque el PC no tiene conexión directa a memoria.
2. Decodificación (decode) IDDecodificación y lectura de los registros involucrados. Puede hacerse simultáneamente por ser campo fijo.
3. Ejecución (execute) EXOperación de la ALU. Depende del tipo de instrucción. Referencia a memoria, salto/bifurcación o instrucción ALU. No al mismo tiempo.
A Rs1; B Rs2; PC PC + 4← ← ←
ALUout A op B o←MAR A + (IR)16; MDR Rd← ←
4. Acceso a memoria (memory access) MEMSe accede a memoria si es necesario (carga o almacenamiento) con la dirección calculada en el paso anterior. O realizar el salto.
5. Post-escritura (write-back) WBEscribir resultado en el registro, tanto si viene de la ALU como si viene de memoria.
MDR M[MAR]; M[MAR] MDR← ←
Rd ← ALUoutA o MDR
Segmentación
HP en cinco etapas
Segmentación
HP en cinco etapas
Segmentación
HP en cinco etapas
Segmentación
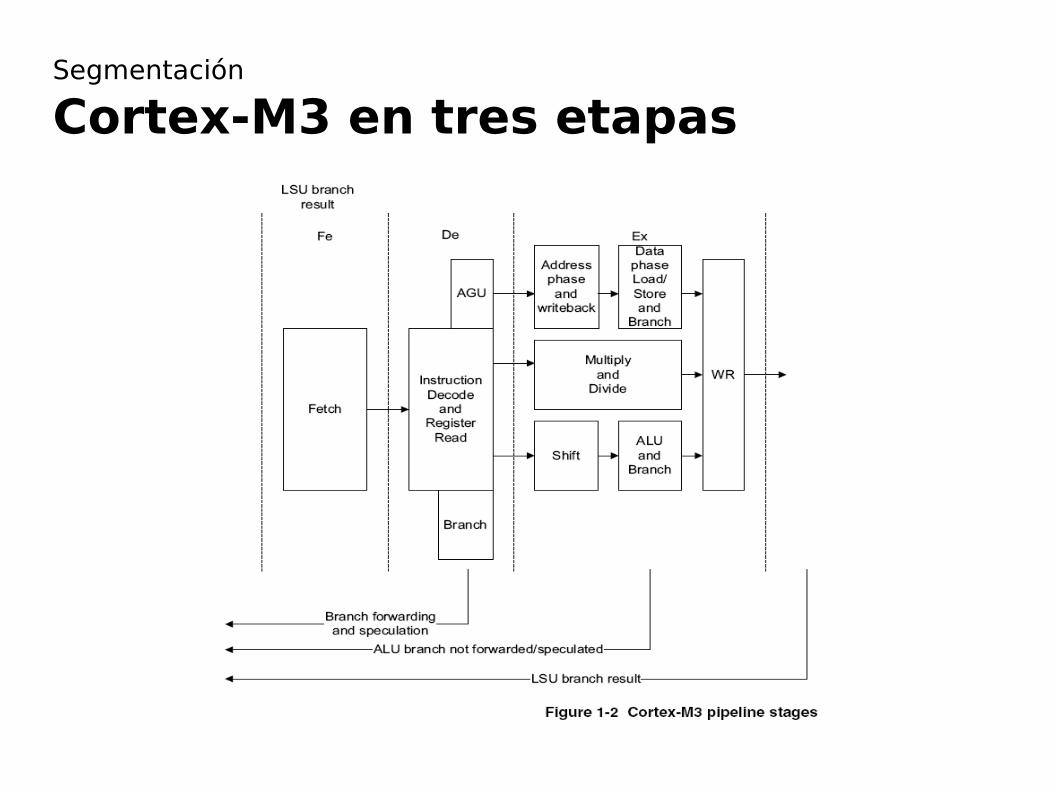
Cortex-M3 en tres etapas
Las instrucciones deben poder ser descompuestas en k etapas de menor duración.
Las entradas de cada etapa ki deben estar
determinadas únicamente por las salidas de la etapa anterior ki-1.
Las duraciones de las diferentes etapas ti deben ser
comparables. El clock del pipeline estará determinado por la etapa más lenta (t=max{ti}).
Segmentación
Condiciones necesarias
Latencia de todas las instrucciones = k.t
Productividad máxima = 1/t
Luego de k-1 ciclos las k etapas del pipeline estarán trabajando.
Teóricamente en ese momento el pipeline tiene la máxima productividad (k instrucciones simultáneas) hasta que se altere la secuencia (salto o interrupción).
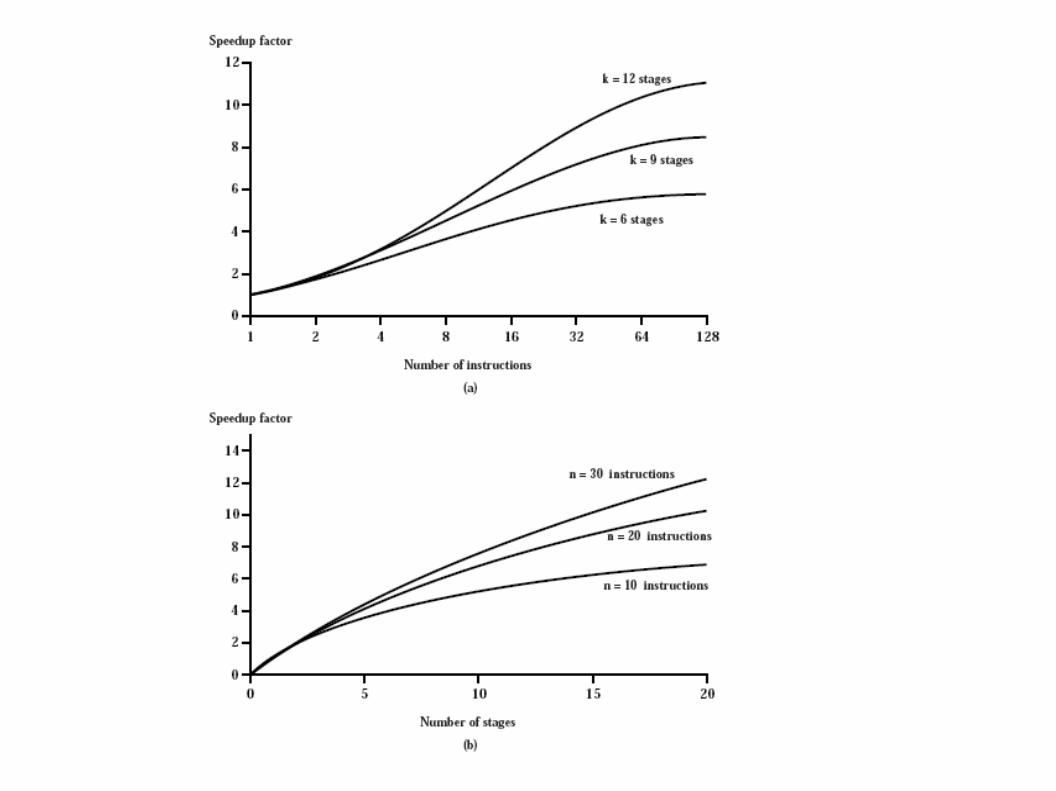
Si aumento el número de etapas, aumenta la productividad, hasta cierto punto (ver luego).
Si el pipeline tiene k etapas de duración t (duración de la etapa más larga), al ejecutarse un conjunto de n instrucciones, la aceleración obtenida con esta técnica puede expresarse como:
S=T
T P
=nkt
t k−1 +nt=
nkk+n−1
k
Segmentación
Aceleración
OBJETIVOS DEL DISEÑADOR: Equilibrar las etapas (igual duración), hacerlas independientes (que no compartan recursos) y mantenerlas ocupadas (atenuar los efectos de los saltos y la dependencia de datos)
Retardo adicional al tener que presentar la información entre etapas en registros intermedios (control de la segmentación).
La única opción es implementar las etapas de igual duración y todas las instrucciones deben respetarlas.
Aumenta la complejidad de la CPU.
Difícil mantener el cauce completo debido a los riesgos de la segmentación (a continuación).
Segmentación
Límites en la implementación
MAXIMO 6-9 ETAPAS
80486 y Pentium: cinco etapas para instrucciones con enteros (FI, D1, D2, EX, WB) y ocho para instrucciones de punto flotante.
PowerPC: cuatro etapas para instrucciones con enteros y seis para instrucciones de punto flotante.
H-P (DLX): cinco etapas (IF, ID, EX, MEM, WB).
PowerPC: Es una arquitectura de computadoras de tipo RISC introducida en 1990 por la Alianza AIM, un consorcio de empresas compuesto por Apple, IBM y Motorola, de cuyas primeras letras, surgió la sigla. Los procesadores de esta familia son producidos por IBM y Freescale Semiconductor que es la division de semiconductores y microprocesadores de Motorola, siendo utilizados principalmente en ordenadores o computadores Macintosh de Apple Computer. Mas información en el sitio de IBM, Arquitecturas Power. Práctica de repaso: comparación con Pentium en Stallings, capítulos 1, 4 y 11.
Segmentación
Ejemplos
HAZARDS: Situaciones que impiden la ejecución de la próxima instrucción de la secuencia durante su correspondiente ciclo (el procesador queda detenido, suspendido, stalled, durante uno o más ciclos). Todas las instrucciones posteriores son también suspendidas y no se realiza una nueva captación mientras dure la suspensión.
Clasificación:
Riesgos estructurales
Riesgos por dependencia de datos
Riesgos de control
Segmentación
Riesgos de la implementación
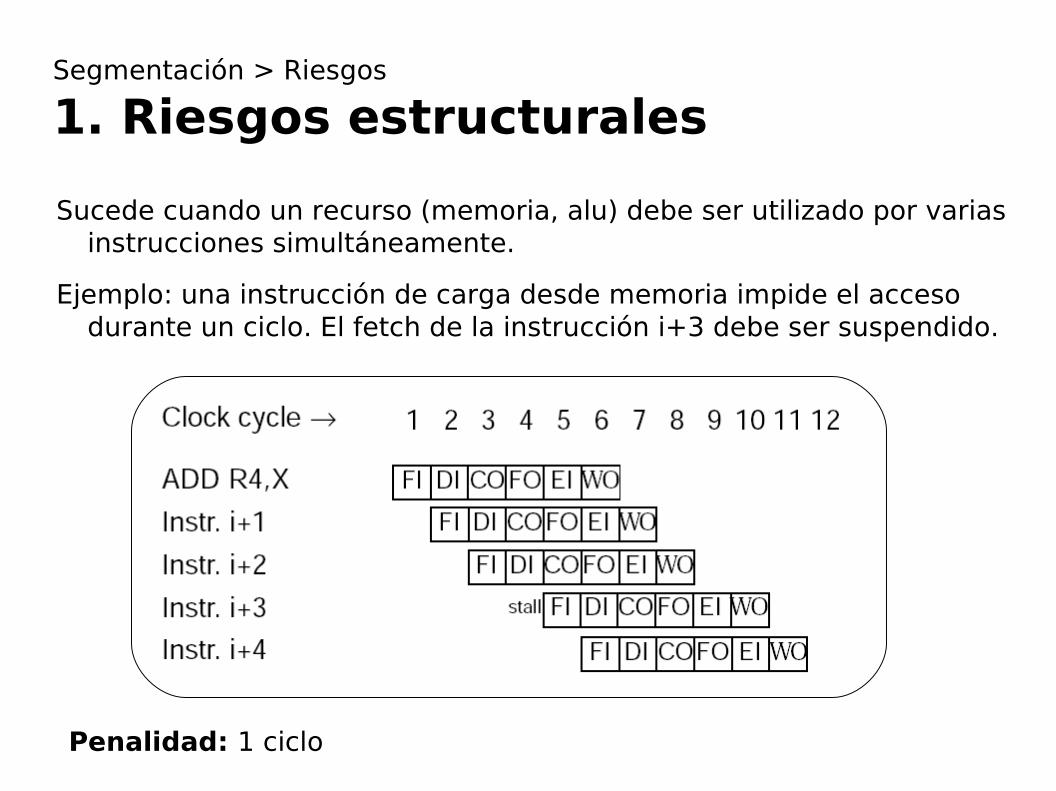
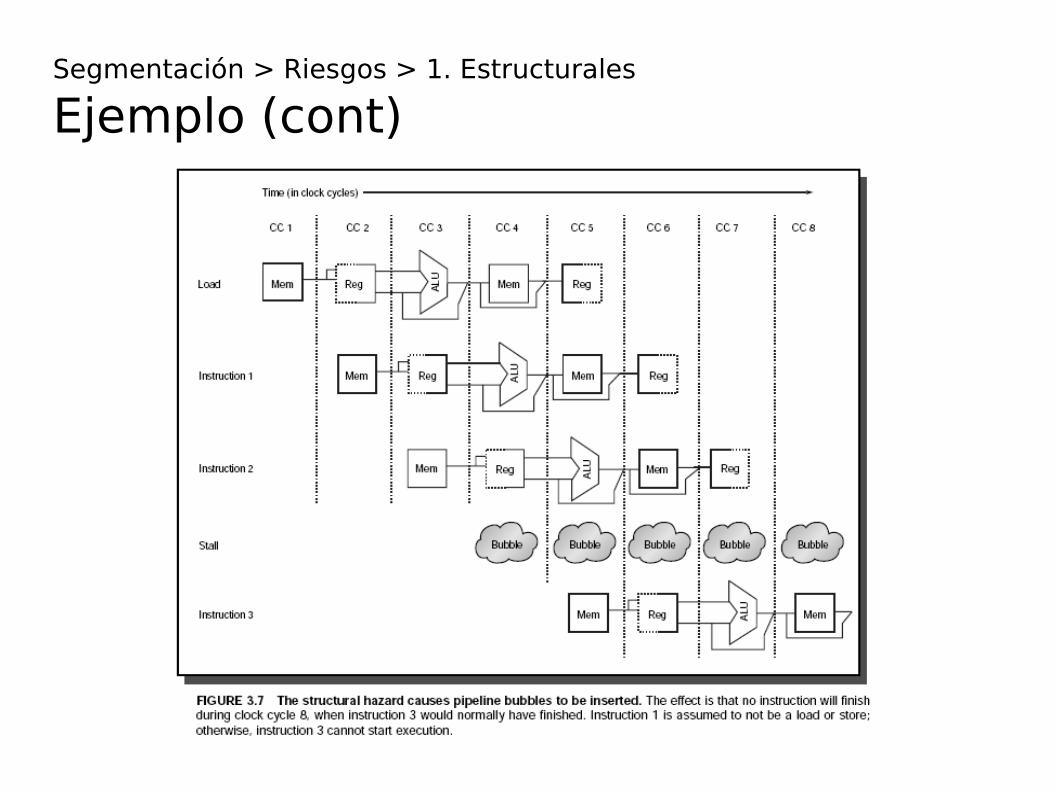
Sucede cuando un recurso (memoria, alu) debe ser utilizado por varias instrucciones simultáneamente.
Ejemplo: una instrucción de carga desde memoria impide el acceso durante un ciclo. El fetch de la instrucción i+3 debe ser suspendido.
Penalidad: 1 ciclo
Segmentación > Riesgos
1. Riesgos estructurales
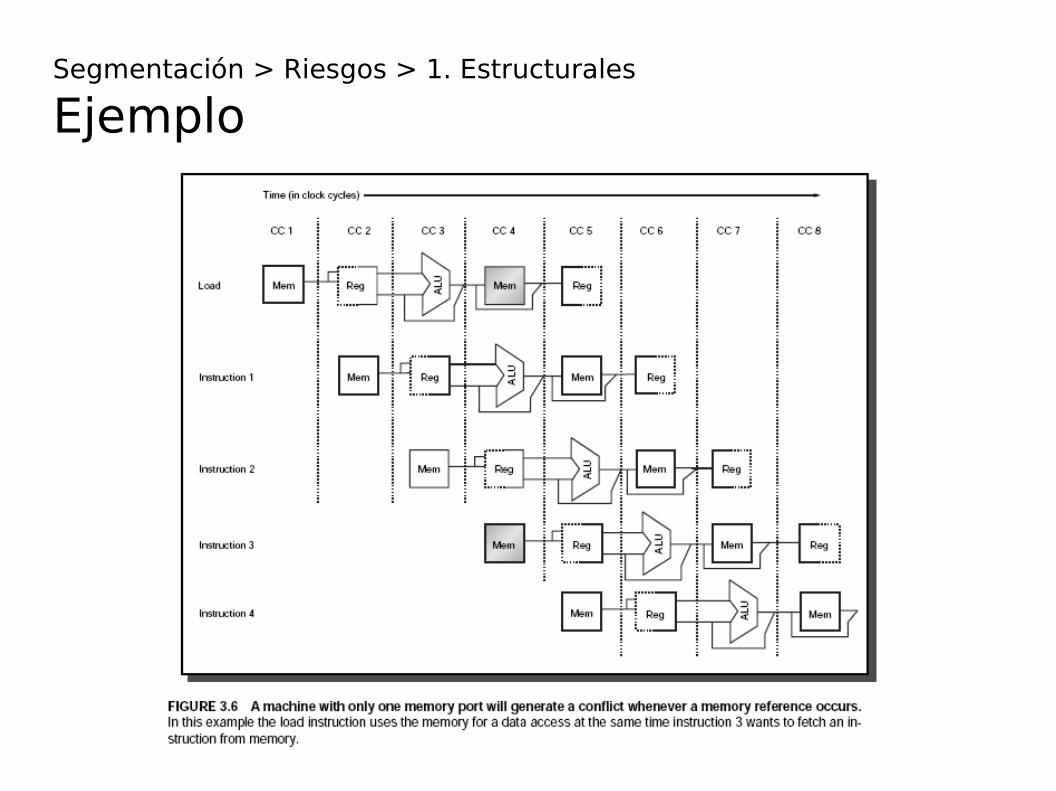
Segmentación > Riesgos > 1. Estructurales
Ejemplo
Segmentación > Riesgos > 1. Estructurales
Ejemplo (cont)
Duplicación de recursos, por ejemplo en el caso de la ALU.
Cache de datos e instrucciones independientes, para evitar los conflictos de memoria.
Un solo acceso a memoria de datos por instrucción (RISC).
Lectura y escritura simultánea del banco de registros (RISC).
Las unidades funcionales de PF pueden ser a la vez segmentadas para soportar varias instrucciones simultáneas (ver luego).
Segmentación > Riesgos > 1. Estructurales
Reducción de los efectos
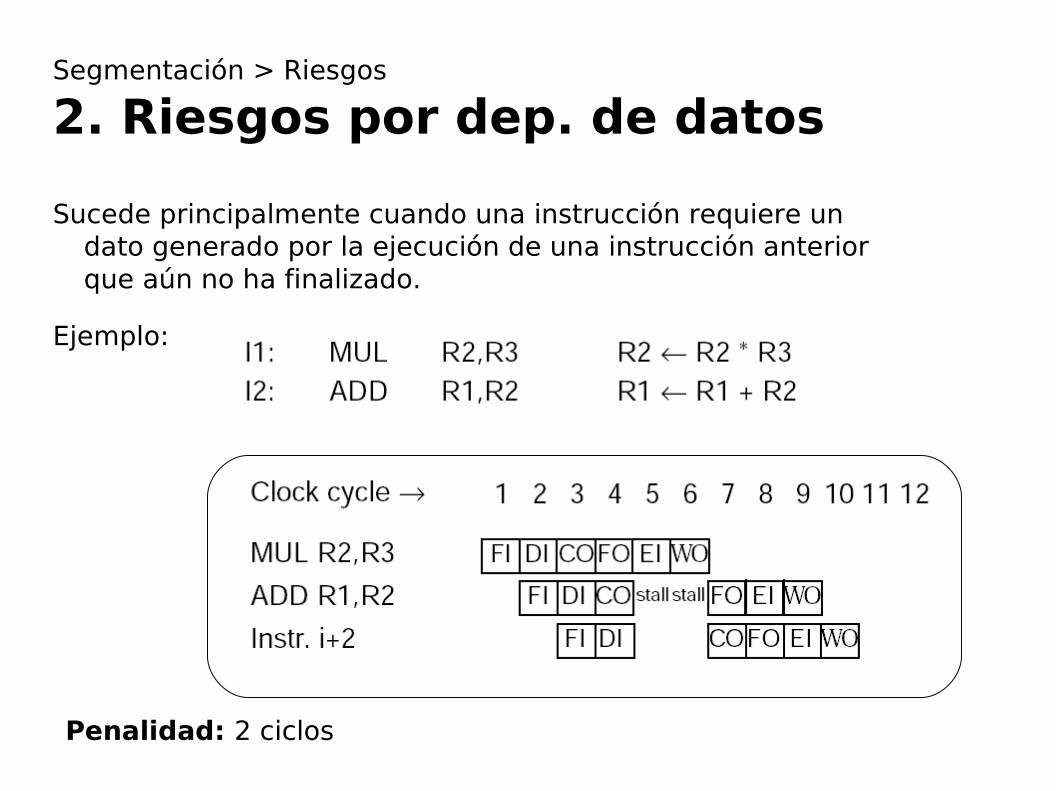
Sucede principalmente cuando una instrucción requiere un dato generado por la ejecución de una instrucción anterior que aún no ha finalizado.
Ejemplo:
Penalidad: 2 ciclos
Segmentación > Riesgos
2. Riesgos por dep. de datos

Para dos instrucciones consecutivas los riesgos pueden clasificarse en tres categorías, siendo la primera la más usual.
RAW (read after write): la segunda instrucción lee un dato antes que la primera lo genere. Lee el dato antiguo.
WAR (write after read): la segunda escribe un destino antes que sea leído por la primera. La primera toma el valor incorrecto (nuevo).
WAW (write after write): la segunda escribe un operando antes de que sea escrito por la primera. Escrituras en orden incorrecto. Queda lo escrito por la primera.
Segmentación > Riesgos > 2. Dependencia de datos
Clasificación
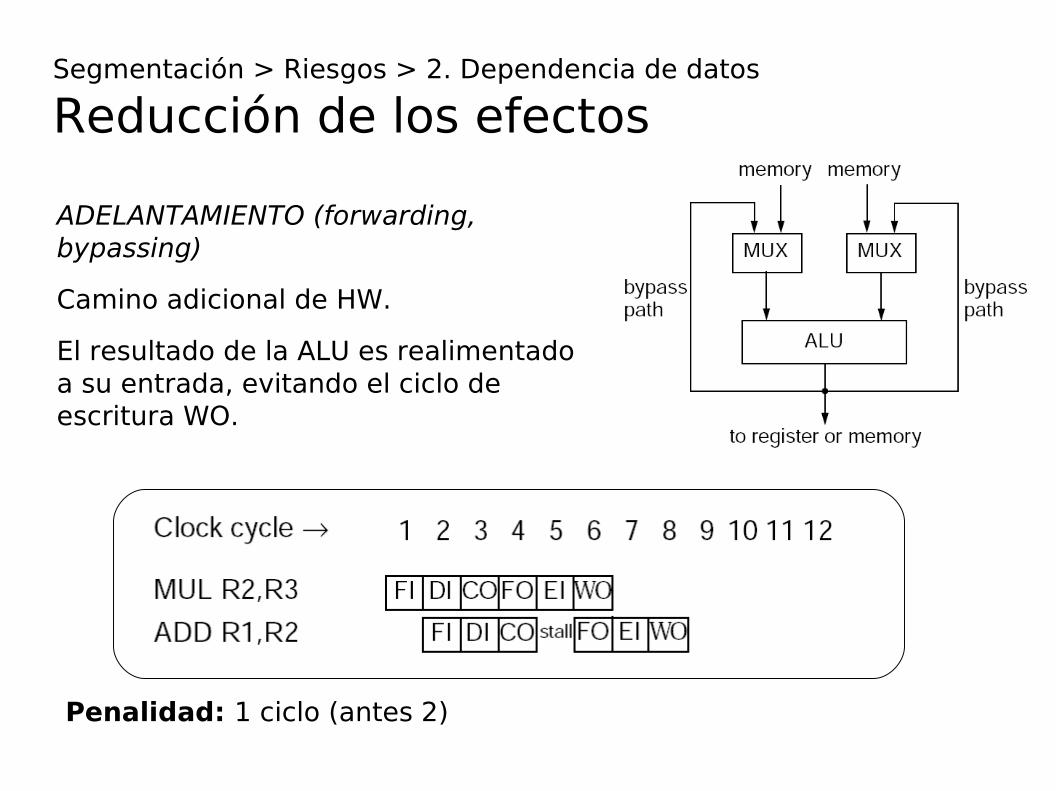
ADELANTAMIENTO (forwarding, bypassing)
Camino adicional de HW.
El resultado de la ALU es realimentado a su entrada, evitando el ciclo de escritura WO.
Penalidad: 1 ciclo (antes 2)
Segmentación > Riesgos > 2. Dependencia de datos
Reducción de los efectos
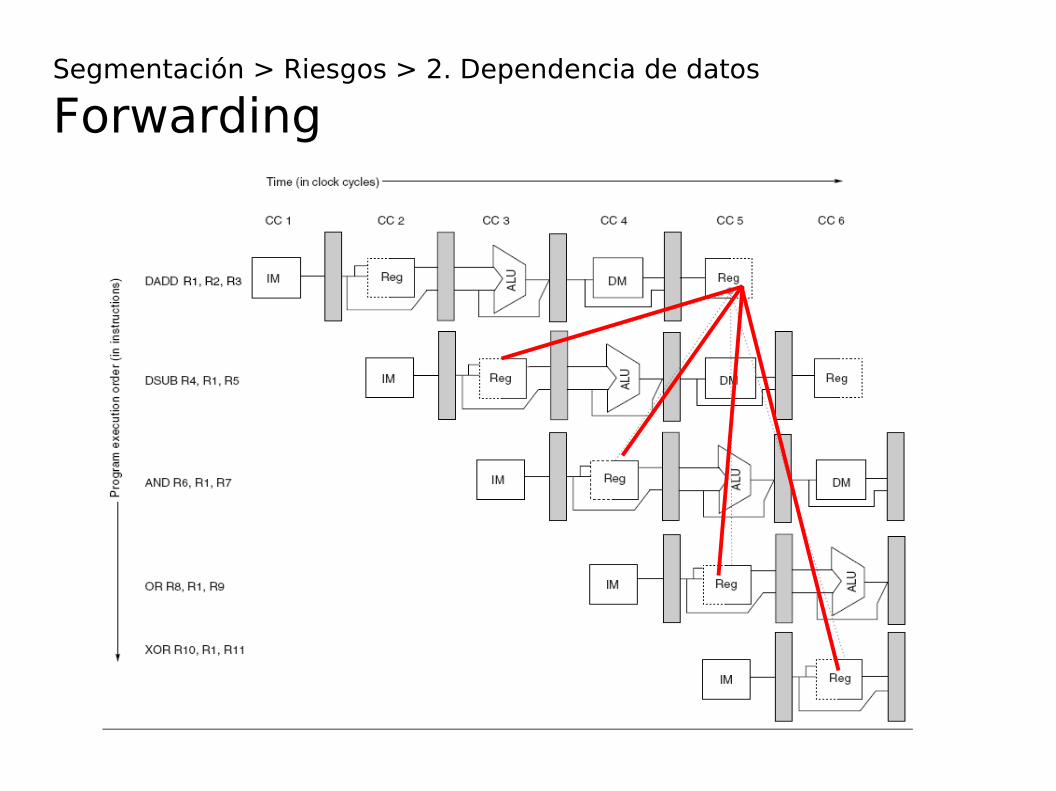
Segmentación > Riesgos > 2. Dependencia de datos
Forwarding

Segmentación > Riesgos > 2. Dependencia de datos
Forwarding (cont)
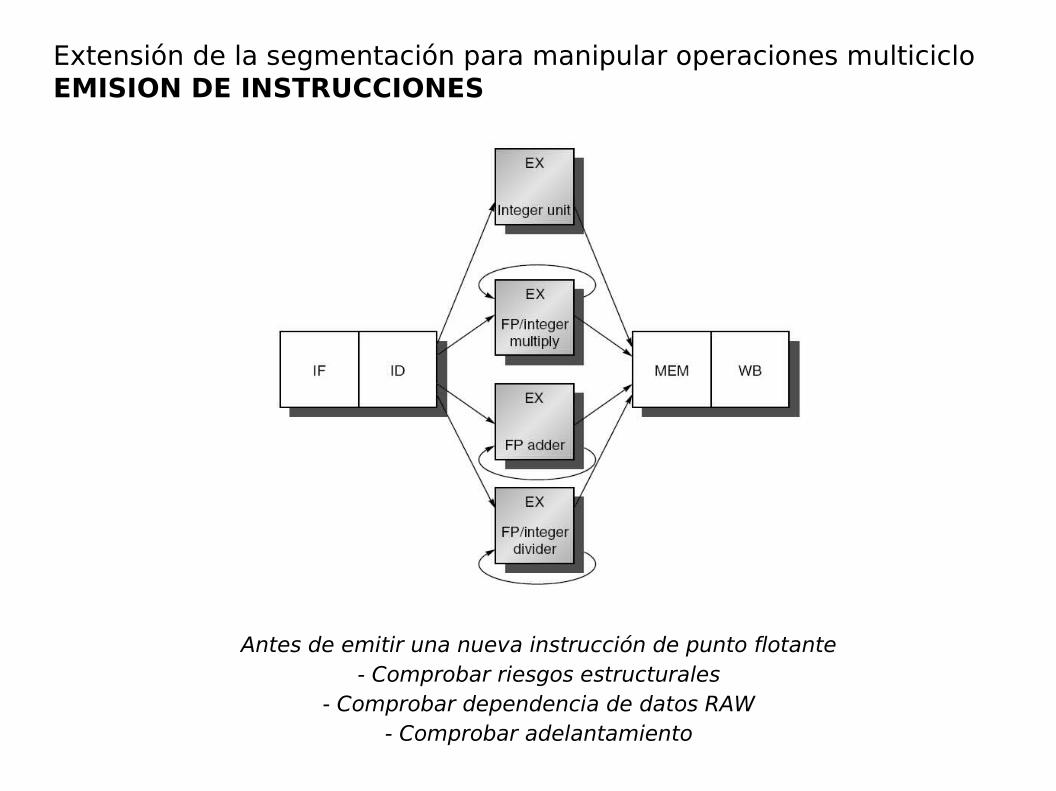
Antes de emitir una nueva instrucción de punto flotante- Comprobar riesgos estructurales
- Comprobar dependencia de datos RAW- Comprobar adelantamiento
Extensión de la segmentación para manipular operaciones multicicloEMISION DE INSTRUCCIONES
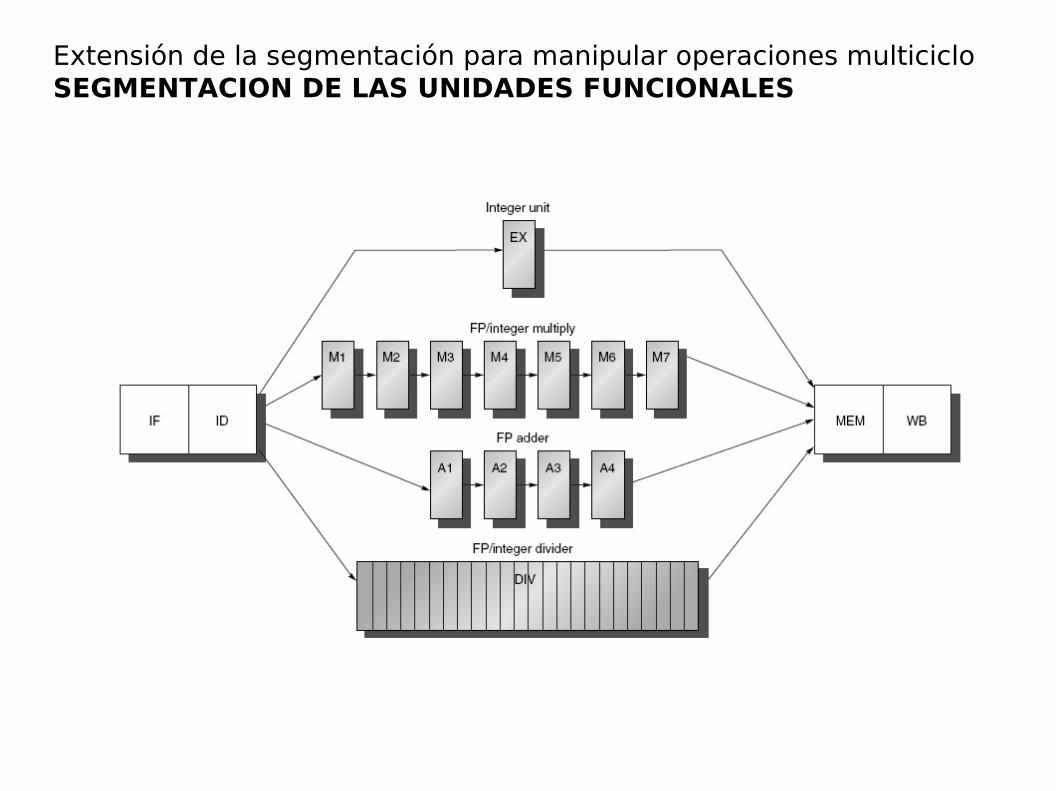
Extensión de la segmentación para manipular operaciones multicicloSEGMENTACION DE LAS UNIDADES FUNCIONALES
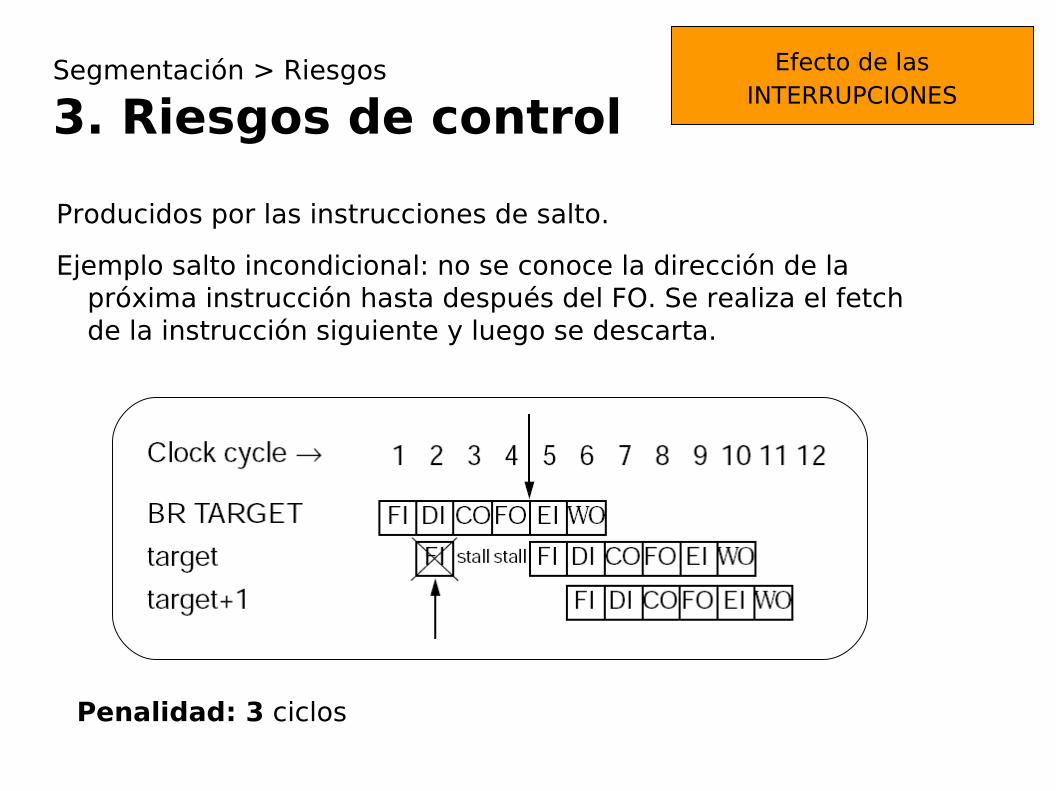
Producidos por las instrucciones de salto.
Ejemplo salto incondicional: no se conoce la dirección de la próxima instrucción hasta después del FO. Se realiza el fetch de la instrucción siguiente y luego se descarta.
Penalidad: 3 ciclos
Segmentación > Riesgos
3. Riesgos de controlEfecto de las
INTERRUPCIONES
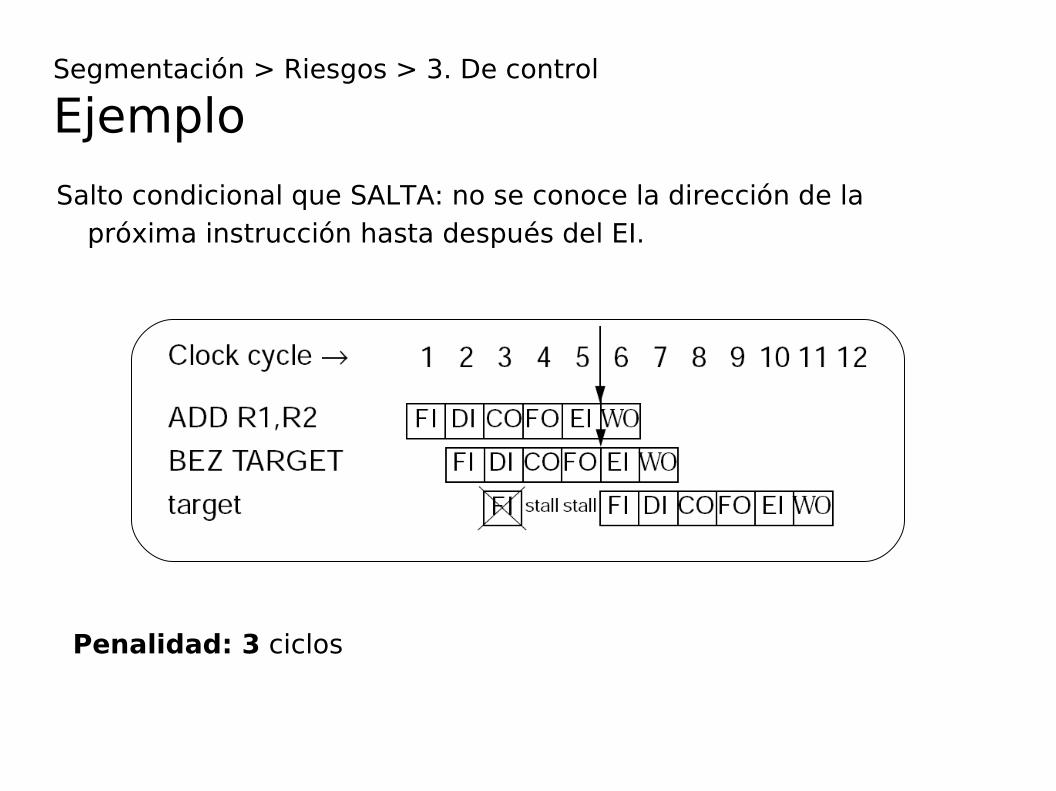
Salto condicional que SALTA: no se conoce la dirección de la próxima instrucción hasta después del EI.
Penalidad: 3 ciclos
Segmentación > Riesgos > 3. De control
Ejemplo
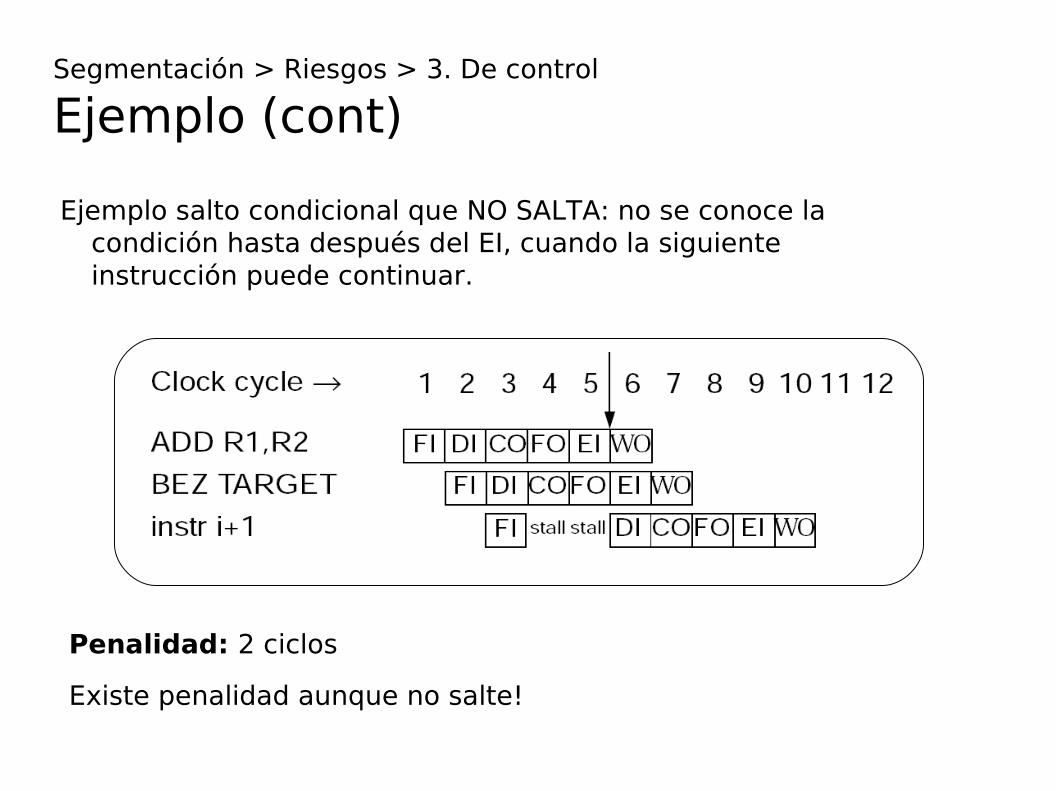
Ejemplo salto condicional que NO SALTA: no se conoce la condición hasta después del EI, cuando la siguiente instrucción puede continuar.
Penalidad: 2 ciclos
Existe penalidad aunque no salte!
Segmentación > Riesgos > 3. De control
Ejemplo (cont)
Las operaciones de control (condicionales o incondicionales) son muy frecuentes en los programas reales, por lo que pueden reducir drásticamente la performance del pipeline.
Estadísticas:
20-35% de las operaciones son saltos.
~65% de dichas operaciones toman el salto.
Hay casi el doble de saltos condicionales que de saltos incondicionales.
Segmentación > Riesgos > 3. De control
Estadísticas
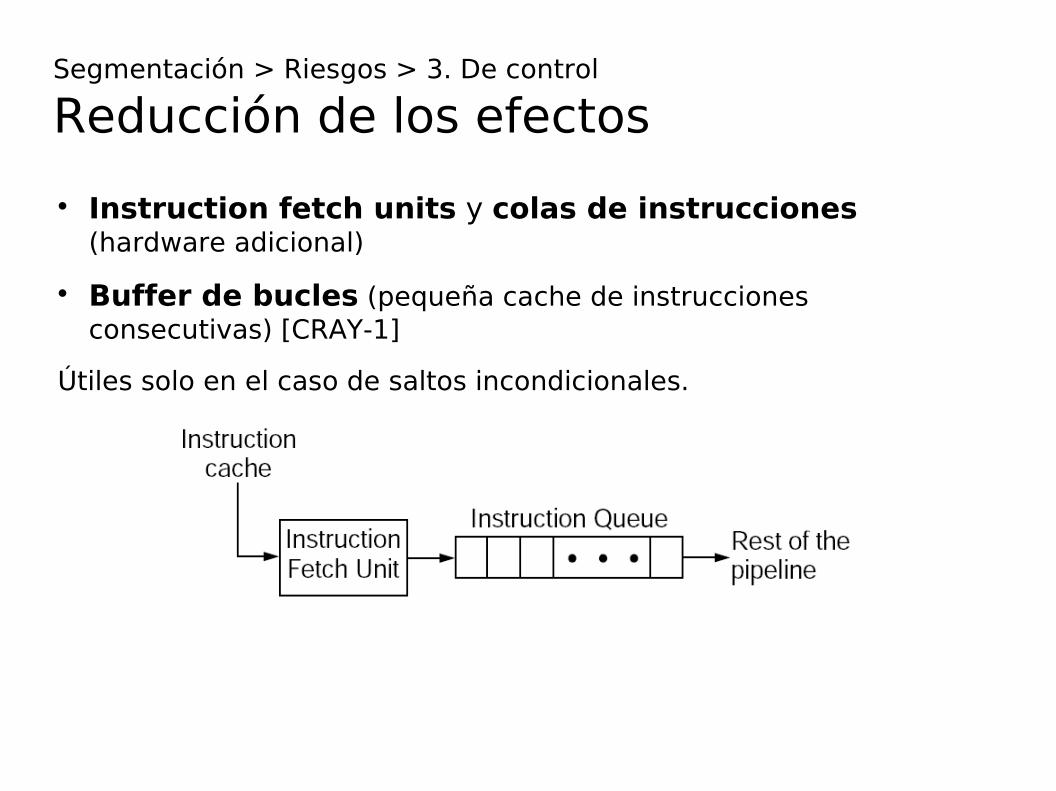
Instruction fetch units y colas de instrucciones (hardware adicional)
Buffer de bucles (pequeña cache de instrucciones consecutivas) [CRAY-1]
Útiles solo en el caso de saltos incondicionales.
Segmentación > Riesgos > 3. De control
Reducción de los efectos
Flujos múltiples:
Se siguen los dos caminos posibles, duplicando las partes iniciales del hardware.
Puede entrar en el cauce una nueva bifurcación.
[IBM 370/168]
Salto retardado:
Modificación del ciclo de instrucción, que requiere reordenamiento del código por parte del compilador.
Luego de cada instrucción de salto hay un branch delay slot: la instrucción siguiente se ejecuta SIEMPRE.
60-80% efectivo, si no NOP.
[RISC]
Segmentación > Riesgos > 3. De control
Reducción de los efectos (cont)
Predicción de saltos:
− Estática
Siempre salta o nunca salta [Motorola 68020] Depende de la direccion [PowerPC 601]
− Dinámica
Uno o dos bits (HW) asociados a cada instrucción de salto [IBM 3090/400]
Tabla de historia de saltos (memoria cache: tabla con dirección de la instrucción de bifurcación + bits de historia + destino) [AMD 29000]
NOTA: Ejecución especulativa (no solo fetch, comienzo a ejecutar)
Segmentación > Riesgos > 3. De control
Reducción de los efectos (cont)
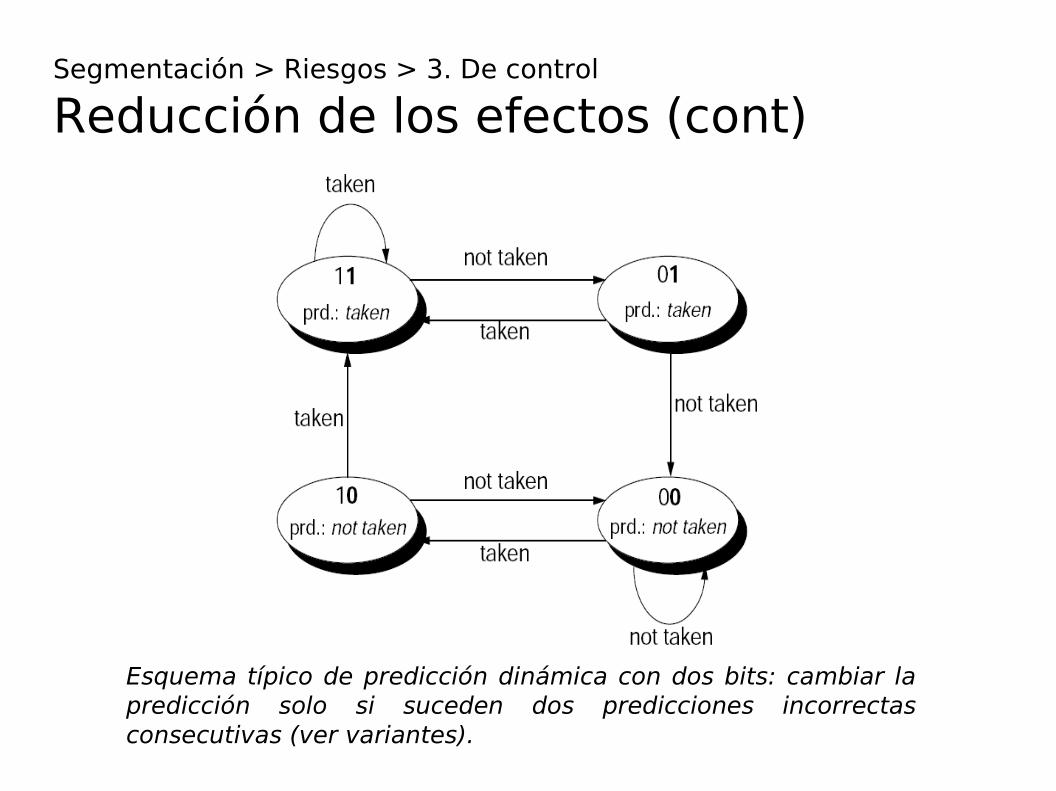
Esquema típico de predicción dinámica con dos bits: cambiar la predicción solo si suceden dos predicciones incorrectas consecutivas (ver variantes).
Segmentación > Riesgos > 3. De control
Reducción de los efectos (cont)
Segmentación > Riesgos
Resumen
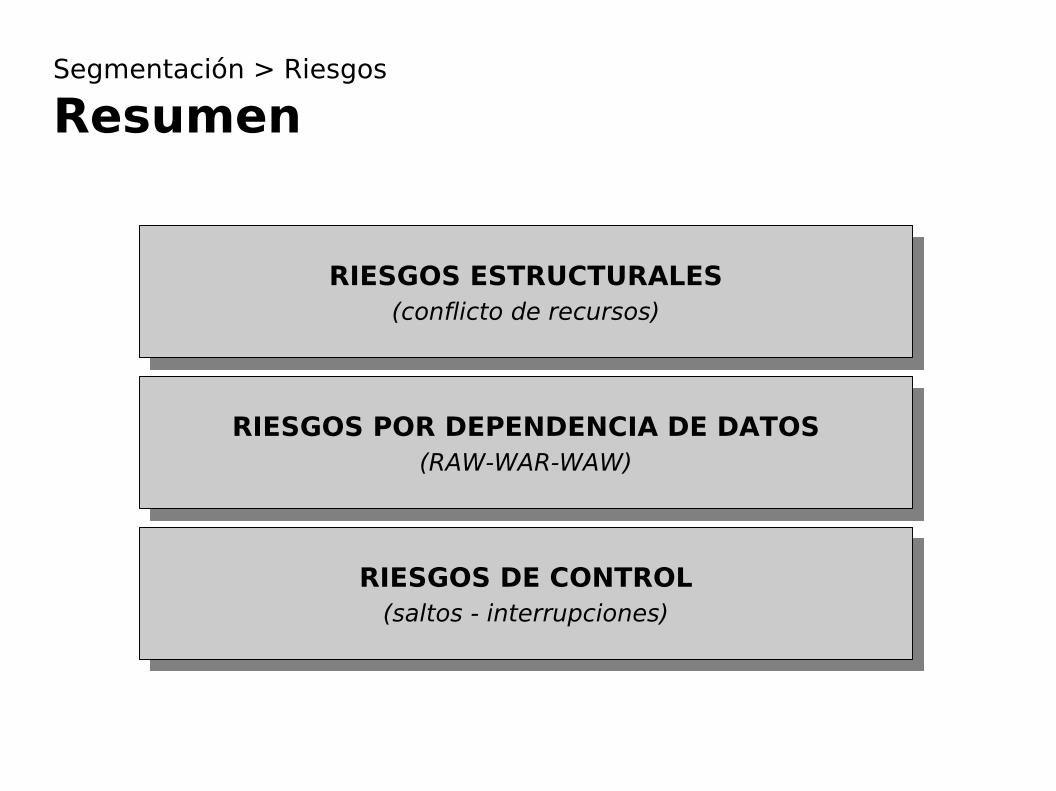
RIESGOS ESTRUCTURALES(conflicto de recursos)
RIESGOS POR DEPENDENCIA DE DATOS(RAW-WAR-WAW)
RIESGOS DE CONTROL(saltos - interrupciones)
Las instrucciones son ejecutadas por la CPU como una secuencia de pasos. La ejecución de instrucciones puede acelerarse sustancialmente utilizando segmentación (pipelining)
Un pipeline se organiza como una secuencia de k etapas. En un cierto instante puede haber k instrucciones activas en el pipeline. Ejemplo línea de montaje.
Aumentar el número de etapas aumenta la productividad, hasta cierto punto.
Los riesgos (hazards) impiden mantener la máxima tasa. Los riesgos estructurales se deben a conflictos en la utilización de recursos. También existen riesgos por dependencia de datos (inevitables) y riesgos de control debidos a las instrucciones de salto.
Las instrucciones de salto pueden deteriorar significativamente la performance del pipeline, por lo que deben aplicarse técnicas que reduzcan sus efectos.
Segmentación
Sumario


















