Diseno de control de un robot de 2GDL para seguir objetos - Mendoza.pdf

Seguimiento de trayectorıa de un robotplanar 2GDL en Hardware-In-the-Loop ?
Noemi Hernandez-Oliva ∗ Maria Barbara Calva-Yanez ∗∗
German Ardul Munoz-Hernandez ∗∗∗
Edgar Alfredo Portilla-Flores ∗∗
∗ Instituto Politecnico Nacional CECyT 2 Miguel Bernard, Ciudad deMexico, Mexico (e-mail: [email protected]).
∗∗ Instituto Politecnico Nacional CIDETEC, Ciudad de Mexico,Mexico (e-mail: b [email protected], [email protected])
∗∗∗ Benemerita Universidad Autonoma de Puebla FCE, Puebla, Mexico(e-mail: [email protected])
Resumen: En este trabajo se presenta la implementacion de una plataforma Hardware-In-the-Loop (HIL) para aplicaciones de control, mediante el uso de dos tarjetas electronicasDiscovery Kit comunicadas en forma serial. Para el desarrollo de la plataforma se programaronen Simulink de Matlab tanto el modelo dinamico de la planta como la ley de control arcotangente propuesta, ademas de un observador con el fin de obtener los datos provenientes de lacomunicacion entre las tarjetas. Para validar el comportamiento del sistema HIL implementadose utilizo una trayectoria tipo flor de ocho petalos, y se realizo una simulacion completa delsistema con Simulink y otra mediante el conjunto de herramientas Robotics de Matlab. Lacomparacion de resultados mostro que el comportamiento es similar, por lo que el sistemaHIL es una opcion viable para verificar leyes de control o la modificacion de alguno de losparametros en la planta sin necesidad de contar con la implementacion real.
Keywords: Robot planar 2GDL, ley de control arco tangente, Hardware-In-the-Loop, modelodinamico, tarjeta electronica.
1. INTRODUCCION
Hoy en dıa, el desarrollo de sistemas digitales buscan-do un mejor desempeno ha propiciado el incremento depropuestas de diseno de controladores en el area de larobotica. Estas propuestas se enfocan a diversas tareas ytipos de controladores; en Ding et al. (2018) se proponeun control de seguimiento de la trayectoria de un robotmovil por medio de una ley de control de modo deslizantetradicional, que es sustituida por una funcion tangentehiperbolica simulada en Matlab. En Pedroso et al. (2013),se presenta un control adaptativo que integra dos estra-tegias de control lineal simuladas en Matlab, aplicadasa un convertidor reductor con una funcion de peso tan-gente hiperbolica. Nascimento et al. (2013) proponen unenfoque para la implementacion de una funcion tangentehiperbolica en el hardware con un modelo polinomial, conla ventaja de requerir menos memoria. Munasinghe andNakamura (2007) presentan un nuevo tipo de control decumplimiento de posicion de fuerza, donde la ganancia dellazo de posicion se reduce de acuerdo con la reduccion deuna funcion de tangente inversa propuesta.
? Instituto Politecnico Nacional - Grupo de Investigacion e Innova-cion en Mecatronica (GIIM)
Moreno-Valenzuela et al. (2008) presentan un robot ma-nipulador para seguimiento de trayectoria, aplicando uncontrolador proporcional derivativo con compensacion degravedad (PD+G), un controlador de Lorıa y Nijmeijer(LN) y un rediseno de este controlador (LNR). Ortiz et al.(2016) presentan el control de posicion de un robot mani-pulador con un regulador del tipo PD+G con estructurashiperbolicas. Urrea and Kern (2016) consideran la eva-luacion y comparacion de diversos controladores para unmanipulador redundante tipo SCARA de cinco grados delibertad. En Lopez-Perez et al. (2008), se desarrolla unaley de control de posicion para un manipulador basadaen funciones trigonometricas hiperbolicas, mientras queLesniewski and Bartoszewicz (2015) proponen una leyde control por modos deslizantes discreta basada en unafuncion tangente hiperbolica para sistemas con y sin per-turbaciones. En Jimenez-Uribe et al. (2015), se presentala comparacion de un control PID y un PD con funcionesdel tipo tangente hiperbolica aplicado a un robot 3GDL,el cual es validado en dos tarjetas de adquisicion de datos.
El desarrollo de controles mediante el uso de dispositivosdigitales ha propiciado la generacion de tecnicas para suvalidacion (Gregoire et al. (2014)). Ası, se puede defi-nir al Hardware-In-the-Loop (HIL) como la interaccion
Memorias del Congreso Nacional de Control AutomáticoISSN: 2594-2492
Puebla, Puebla, México, 23-25 de octubre de 2019 316 Copyright©AMCA. Todos los Derechos Reservados www.amca.mx

de componentes virtuales y reales, donde el sistema decontrol puede aplicarse a una planta virtual conteniendoel modelo dinamico del sistema, ademas de actuadores ysensores modelados de forma virtual o fısica, con lo cual severifique su rendimiento y comportamiento. Esta tecnicapuede emplearse para validar leyes de control; en Shi et al.(2016), se propone un modelo de tangente hiperbolicadifusa para el rastreo de caminos en un camion mineroarticulado validado en HIL. En Sahu et al. (2015), se pre-senta un modelo de control predictivo multi parametrico(mpMPC) con un PI en cascada aplicado al control dela temperatura del aire de suministro en sistemas de aireacondicionado, utilizando HIL. Pratt et al. (2017) propo-nen un modelo de control predictivo en HIL para recursosde distribucion de energıa y de respuesta de demanda paracasas simuladas y sistemas de aire acondicionado.
En el presente trabajo se implementa una ley de con-trol para un robot planar de dos grados de libertadutilizando una funcion arco tangente, en una plataformaHIL programada en Simulink de Matlab en dos tarjetaselectronicas comunicadas en forma serial. La organizaciondel documento es la siguiente: en la Seccion 2 se describeel modelo dinamico del robot planar y la ley de controla implementar; en la Seccion 3 se muestra el desarrollode la plataforma HIL en las tarjetas; en la Seccion 4se analizan los resultados obtenidos de la emulacion yla simulacion del robot; finalmente, en la Seccion 5 seexponen las conclusiones y trabajos a futuro.
2. DINAMICA DEL ROBOT PLANAR 2GDL
Un robot se define como un manipulador multifuncionalreprogramable disenado para manejar materiales, herra-mientas o dispositivos, a partir de movimientos con loscuales se obtenga un buen desempeno en una gran varie-dad de tareas (Spong and Vidyasagar (1989)).
2.1 Modelo dinamico
Para definir el comportamiento de un robot es necesariodescribirlo con un modelo matematico desde una leyfısica. La dinamica de un robot rıgido serial de n-enlaces(Kelly et al. (2005)) se describe de forma general con laecuacion (1), donde M es la matriz de inercias, C es lamatriz de fuerzas centrıpetas y de Coriolis, B es la matrizde friccion viscosa y G corresponde al par gravitacional:
M(q)q + C(q, q)q +B(q, q)q +G(q) = τ (1)
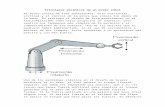
Para un robot planar de 2 GDL como el que se muestra enla Fig. 1, su modelo dinamico se describe en el espacio deestados para las posiciones de los eslabones q1 y q2, dondelas velocidades estan dadas por q1 y q2, como indica laecuacion (2) (Reyes Cortes (2011)). Las expresiones (3)a (6) corresponden a la masa (m1, m2) y longitud delos eslabones (r1, r2), friccion viscosa (b1, b2), fuerza degravedad (g), longitud del centro de masa de los eslabones(rc1, rc2), inercia de los eslabones (I1, I2), constantesproporcional y derivativa del controlador (Kp, Kd).
Figura 1. Robot planar 2GDL (Reyes Cortes (2011))
d
dt
]=
[q
M(q)−1[τ(t) − C(q, q)q −B(q, q)q −G(q)]
](2)
m11 = m1 ∗ r2c1 +m2 ∗ r21 +m2 ∗ r2c2+ 2 ∗m2 ∗ r1 ∗ rc2 ∗ cos(q2) + I1 + I2
m12 = m2l2c2 +m2l1lc1cos(q2) + I2
m21 = m2l2c2 +m2l1lc1cos(q2) + I2
m22 = m2l2c2 + I2
M =
[m11 m12
m21 m22
](3)
c11 = −2m2l1lc2sen(q2)q2c12 = −m2l1lc2sen(q2)q2c21 = m2l1lc2sen(q2)q1c22 = 0
C =
[c11 c12c21 c22
](4)
b11 = b1b12 = 0
b21 = 0
b22 = b2
B =
[b11 b12b21 b22
](5)
g11 = (m1 ∗ rc1 +m2 ∗ r1) ∗ g ∗ sin(q1)
+m2 ∗ g ∗ rc2 ∗ sin(q1 + q2)
g21 = m2 ∗ g ∗ rc2 ∗ sin(q1 + q2)
G =
[g11g21
](6)
2.2 Ley de control propuesta
La ecuacion (7) presenta la forma general de una ley decontrol que utiliza la funcion arco tangente, mientras quela ecuacion (8) corresponde a la ley de control tipo arcotangente implementada en el presente trabajo:
τ = Kp ∗ atan(e) −Kd ∗ atan(q) +G (7)
τ = Kp ∗ atan(λ ∗ e) −Kd ∗ atan(γ ∗ q) +G (8)
Puebla, Puebla, México, 23-25 de octubre de 2019 317 Copyright©AMCA. Todos los Derechos Reservados www.amca.mx

donde e es el error de posicionamiento dado por e = (qd−q), qd es la posicion deseada, λ es una matriz de conversion(radianes, grados) y γ es una matriz unitaria que permiteexpresar en los mismos terminos a la segunda parte de laecuacion de la ley de control.
3. HARDWARE-IN-THE-LOOP (HIL)
HIL es una tecnica alternativa de bajo costo cuando serequiere ajustar algun parametro del controlador en unaplanta real (Gregoire et al. (2014)), ya que dicha modifica-cion puede realizarse al emular su comportamiento en undispositivo electronico en repetidas ocasiones, sin alterarla planta fısica. Para el caso del robot planar de estetrabajo, se propuso una plataforma utilizando dos tarjetaselectronicas Discovery Kit de ST Microelectronics, lascuales cuentan con las siguientes caracterısticas:
Microcontrolador STM32F407VGT6 de 32-bit ARMCortex-M4.Memoria flash de 1 Mbyte.Herramienta de depuracion integrada ST-LINK.Acelerometro digital ST-MEMS.Microfono digital.DAC de audio con controlador de altavoz de clase Dintegrado.8 LED y 2 botones pulsadores.Conector USB OTG micro-AB.Fuente de alimentacion de 3V a 5V.
Las tarjetas se programaron en Simulink-Matlab version2018a y el blockset libre de Waijung, el cual utiliza elcodificador embebido al momento de descargar programasa la tarjeta Discovery Kit. Para implementar la platafor-ma se realizaron tres programas; el primero incluye a laplanta (modelo dinamico del robot planar) mientras queel segundo corresponde a la ley de control (arco tangen-te), siendo ambos programas descargados a las tarjetaselectronicas. Un tercer programa denominado observa-dor (programado directamente en Simulink) monitoreael comportamiento del sistema de control y grafica losresultados, los cuales son leıdos por medio de la comuni-cacion serial entre las tarjetas y la computadora. Dichacomunicacion requiere una velocidad de transmision de115, 200 baudios, mientras que el tiempo de integracionpara ambos sistemas (simulado y plataforma HIL) es det = 0,001s, lo que permite su sincronizacion.
En la Fig. 2 se muestra el programa realizado para laplanta, el cual consta del modelo dinamico del robotplanar realizado dentro de un bloque de funcion y loscorrespondientes bloques de comunicacion. En la Fig. 3aparece el programa para la ley de control, el cual constade la funcion arco tangente en un bloque de funcioncon los correspondientes bloques de comunicacion conla tarjeta modelo. Por su parte, la Fig. 4 muestra elprograma correspondiente al observador, desde el cual sevisualizan los datos provenientes de la comunicacion entrelas tarjetas de la planta y el control.
Figura 2. Programa modelo
Figura 3. Programa control
Figura 4. Programa observador
La Fig. 5 muestra la comunicacion serial de la plataformaHIL con base en el puerto USART de la tarjeta, requirien-do un adaptador USB-serial para conectarse a la compu-tadora donde se obtienen los datos a graficar. Finalmente,
Puebla, Puebla, México, 23-25 de octubre de 2019 318 Copyright©AMCA. Todos los Derechos Reservados www.amca.mx

la Fig. 6 presenta el diagrama con la interaccion entrelas senales en la plataforma HIL (que envıa y recibe losparametros del torque, posicion y velocidad) y el obser-vador (que grafica la cinematica directa, posicion, torque,error de posicion y la integral del error al cuadrado).
Figura 5. Conexiones fısicas plataforma HIL
Figura 6. Conexiones fısicas plataforma HIL
4. RESULTADOS OBTENIDOS
Para comparar los resultados de la plataforma HIL, serealizo una simulacion completa del sistema utilizandoSimulink de Matlab y verificado con el conjunto deherramientas Robotics. Los parametros de la simulacionson: masa m1 = 23,902 kg y m2 = 3,880 kg y longitudde los eslabones r1 = 0,45 m y r2 = 0,45 m, friccionviscosa b1 = 2,288 Ns/m y b2 = 0,175 Ns/m, fuerza degravedad g = 9,81 m/s2, longitud del centro de masa delos eslabones rc1 = 0,091 m y rc2 = 0,048 m, inercia de loseslabones I1 = 1,266 kgm2, I2 = 0,093 kgm2, constantesdel controlador Kp = [100 0; 0 15] y Kd = [100 0; 0 15].
Los valores para la trayectoria propuesta son: coordenadaen x=0,4, coordenada en y=0,4, radio rc=0,2, α=0,075 yβ=4. La trayectoria deseada en terminos de las coordena-das se presenta en el sistema de ecuaciones (9), mientrasque para determinar la posicion articular de los eslabonesse emplea la cinematica inversa que se presenta en elsistema de ecuaciones (10):
x= xc+ α+ (rc ∗ (cos(t))) ∗ (sin(β ∗ t)) (9)
y = yc+ α+ (rc ∗ (sin(t))) ∗ (sin(β ∗ t))
q2d = acos
(x2 + y2 − r21 − r22
2 ∗ r1 ∗ r2
)(10)
q1d = atan(yx
)− atan
(r2 ∗ sin(q2d)
r1 + r2 ∗ cos(q2d)
)
Como se menciono anteriormente, los resultados de laplataforma HIL propuesta y emulada con las dos tarjetaselectronicas se compararon con los de la simulacion enSimulink, como se muestra en la Fig. 7:
Figura 7. Programa simulacion completa
La Fig. 8 muestra la plataforma HIL y sus correspondien-tes conexiones fısicas, mientras que la Fig. 9 presenta elresultado obtenido de la simulacion utilizando Robotics,en donde se puede validar que el robot sigue la trayectoriapropuesta dentro de su espacio de trabajo.
Figura 8. Plataforma HIL propuesta
La Fig. 10 muestra los resultados de la emulacion delsistema con la plataforma y de la simulacion; en amboscasos el robot es capaz de seguir la trayectoria deseada yformar una flor de ocho petalos. Este tipo de trayectoriasde alta complejidad ha sido tratado por Reyes Cortes(2011) mediante una simulacion completa en Matlab. LaFig. 11 presenta el comportamiento de la posicion enambos eslabones. Para el eslabon 1 (q1) y el eslabon 2(q2), la posicion que se sigue es practicamente la mismaentre el sistema emulado y el simulado. En la Fig. 12se observan los torques necesarios en los motores del
Puebla, Puebla, México, 23-25 de octubre de 2019 319 Copyright©AMCA. Todos los Derechos Reservados www.amca.mx

Figura 9. Simulacion en Robotics toolbox
Figura 10. Trayectoria deseada flor de ocho petalos
Figura 11. Posiciones de los eslabones
robot para desplazarse a lo largo de la trayectoria deuna flor propuesta; al igual que con las posiciones, en lostorques se requiere un mayor esfuerzo en q2 para realizarel seguimiento en ambos sistemas. En la Fig. 13 se veque el error converge a cero en menos de un segundopara q2 y en aproximadamente diez segundos para q1 en
ambos sistemas. Para analizar el sistema mediante el errordinamico se obtuvo la integral del error al cuadrado de laposicion de los eslabones, donde q1 requiere un valor de0,004 y q2 un valor de 0,2 para que el sobretiro en larespuesta de salida sea pequeno (Fig. 14).
Figura 12. Torque requerido por los motores en loseslabones
Figura 13. Error de posicion de los eslabones
5. CONCLUSIONES
En el presente trabajo se desarrollo y valido una plata-forma implementada en HIL con dos tarjetas electronicasDiscovery Kit de STM Microelectronics, utilizando comu-nicacion serial entre las tarjetas y la computadora, conla finalidad de enviar y recibir datos entre ellos. En losresultados obtenidos se observa que los sistemas emuladoy simulado presentan comportamientos similares y un so-bretiro pequeno. La implementacion de la planta a partir
Puebla, Puebla, México, 23-25 de octubre de 2019 320 Copyright©AMCA. Todos los Derechos Reservados www.amca.mx

Figura 14. Integral del error cuadratico de posicion
del modelo dinamico y de la ley de control deseada en lastarjetas electronicas usando la tecnica de HIL, permitevalidar el comportamiento del sistema sin necesitar laplanta real, pudiendo cambiar las leyes de control y losparametros de la planta, por lo que dicha tecnica es unaalternativa viable de diseno a bajo costo.
Finalmente, como trabajo a futuro se plantea complemen-tar el modelo utilizado incluyendo el efecto de los actuado-res y sensores del sistema y realizando la comparacion delos resultados obtenidos en la emulacion con los generadospor la planta real.
ACKNOWLEDGEMENTS
El primer autor agradece al CONACyT por la beca paraestudios de doctorado. Todos los autores agradecen alInstituto Politecnico Nacional el apoyo por medio delproyecto SIP20196288.
REFERENCIAS
Ding, Y., Liu, C., Lu, S., and Zhu, Z. (2018). Hyperbo-lic sliding mode trajectory tracking control of mobilerobot. Advances in Engineering Research. 3rd Interna-tional Conference on Electrical, Automation and Me-chanical Engineering (EAME 2018), 127, 234–238.
Gregoire, L.A., Belanger, J., Dufour, C., and Blanchette,H.F. (2014). Real-time simulation of modular multile-vel converters (mmcs). In H. Abu-Rub, M. Malinowski,and K. Al-Haddad (eds.), Power Electronics for Rene-wable Energy Systems, Transportation and IndustrialApplications, 591–607. John Wiley & Sons, Ltd.
Jimenez-Uribe, A., Serna-Hernandez, L.F., Hernandez-Paredes, J.M., and Munoz-Barron, B. (2015). Com-parative study of a pid and pd control bounded byhyperbolic tangent function in robot 3 dof. In 2015International Conference on Mechatronics, Electronicsand Automotive Engineering (ICMEAE), 199–204.
Kelly, R., Davila, V.S., and Perez, J.A.L. (2005). Controlof Robot Manipulators in Joint Space. Springer.
Lesniewski, P. and Bartoszewicz, A. (2015). Hyperbolictangent based switching reaching law for discrete timesliding mode control of dynamical systems. In 2015International Workshop on Recent Advances in SlidingModes (RASM), 1–6.
Lopez-Perez, E., Sanchez-Sanchez, P., Michua-Camarillo,A., Reyes-Cortes, F., and Cebada-Reyes, J.G. (2008).A new control structure for robot manipulators basedon the trigonometric functions sech+sinh. Electronics,Robotics and Automotive Mechanics Conference 2008,490–495.
Moreno-Valenzuela, J., Santibanez, V., and Campa, R.(2008). On output feedback tracking control of robotmanipulators with bounded torque input. InternationalJournal of Control, Automation, and Systems, 6, 76–85.
Munasinghe, S.R. and Nakamura, M. (2007). Hyperbolictangent function based force-position compliant contro-ller for robotic devices. In 2007 International Confe-rence on Control, Automation and Systems, 2397–2401.
Nascimento, I., Jardim, R., and Morgado-Dias, F. (2013).A new solution for the hyperbolic tangent implementa-tion in hardware: Polynomial modeling of the fractionalexponential part. Neural Computing and Applications,23, 363–369.
Ortiz, T.J., Arroyo, O.R., Jaime, J.C.M., Dıaz, M.L., andCortes, F.R. (2016). Control de posicion hiperbolico derobots manipuladores. La Mecatronica en Mexico, 5(1),1–9.
Pedroso, M.D., Nascimento, C.B., Tusset, A.M., anddos Santos Kaster, M. (2013). A hyperbolic tangentadaptive pid + lqr control applied to a step-downconverter using poles placement design implemented infpga. Mathematical Problems in Engineering, 1–8.
Pratt, A., Ruth, M., Krishnamurthy, D., Sparn, B., Lu-nacek, M., Jones, W., Mittal, S., Wu, H., and Marks,J. (2017). Hardware-in-the-loop simulation of a dis-tribution system with air conditioners under modelpredictive control. In 2017 IEEE Power Energy SocietyGeneral Meeting, 1–5.
Reyes Cortes, F. (2011). Robotica. Control de robotsmanipuladores. Alfaomega Grupo Editor, Mexico.
Sahu, C., Radhakrishnan, T.K., and Sivakumaran, N.(2015). Real time closed loop data based estimationand explicit model based control of an air conditioningsystem implemented in hardware in loop scheme. In2015 International Conference on Robotics, Automa-tion, Control and Embedded Systems (RACE), 1–7.
Shi, G., Yang, J., Zhao, X., Li, Y., Zhao, Y., and Li, J.(2016). A H−infinity control for path tracking withfuzzy hyperbolic tangent model. Journal of ControlScience and Engineering, 1–9.
Spong, M.W. and Vidyasagar, M. (1989). Robot Dyna-mics and Control. Wiley.
Urrea, C. and Kern, J. (2016). Design, simulation andcomparison of controllers for a redundant robot. CaseStudies in Mechanical Systems and Signal Processing,3, 9–21.
Puebla, Puebla, México, 23-25 de octubre de 2019 321 Copyright©AMCA. Todos los Derechos Reservados www.amca.mx