SISMÓGRAFOS I - UNAMusuarios.geofisica.unam.mx/vala/cursos/Registros_Sismicos_2013-1_fil… ·...
7
SISMÓGRAFOS I 1
Transcript of SISMÓGRAFOS I - UNAMusuarios.geofisica.unam.mx/vala/cursos/Registros_Sismicos_2013-1_fil… ·...

SISMÓGRAFOS I
1

2. EL SISMÓGRAFO
2.1 Sismógrafos analógicos y digitales2.2 Sismógrafos, acelerógrafos, inclinómetros, etc. 2.3 Sismómetros de banda ancha2.4 Calibración y curvas de respuesta2.5 Sismógrafos portátiles y sismógrafos permanentes 2.6 Telemetría de señales sísmicas.
•
2

SISMOGRAMA, SISMÓMETRO Y SISMÓGRAFO
• Sismograma: El sismograma U(t) se puede escribir como una convolución entre 3 componentes, la fuente S(t), la respuesta de la Tierra P(t) y la respuesta del instrumento I(t):
• U(t) = S(t)*P(t)*I(t)
• Sismómetro: Un aparato que detecta el movimiento de las ondas sísmicas (el sensor)
• Sismógrafo: Un conjunto de instrumentos que detectan y graban movimiento de ondas sísmicas.
Lay & Wallace
3

¿QUÉ TIENE QUE HACER EL SISMÓMETRO?
• Rango dinámico (~0.1 nm–10 m; 109-1011) -ratio máx./mín. señal registrable; dB-
• Rango de frecuencia: 10-5 - 103 Hz
• Sensibilidad (la señal más pequeña que se puede resolver)
• Linealidad
CHAPTER 1
2
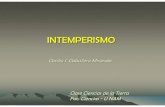
(m/s2) is the most natural unit, since it is directly related to force and the peak ground acceleration is an often quoted measure. The range of amplitudes measured in seismology is very large. The natural background noise, highly frequency dependent, sets the limit for the smallest amplitudes we can measure, which is typically 1 nm displacement at 1 Hz (Chapter 3), while the largest displacement is in the order of 1 m. This is a dynamic range of 109. The band of frequencies we are interested in also has a large range, from 10-5 to 1000 Hz (Table 1). The challenge is therefore to construct seismic instruments, both sensors and recorders, which cover at least part of this large frequency and dynamic range. Table 1.1 Typical frequencies generated by different seismic sources.
Frequency (Hz) Type of measurements 0.00001-0.0001 Earth tides 0.0001-0.001 Earth free oscillations, earthquakes 0.001-0.01 Surface waves, earthquakes 0.01-0.1 Surface waves, P and S waves, earthquakes with M > 6 0.1-10 P and S waves, earthquakes with M> 2 10-1000 P and S waves, earthquakes, M< 2
Earlier, analog instrument were usually made to record one type of ground motion like velocity. Traditionally, seismologists prefer recording weak motion displacement or velocity, for easy interpretation of seismic phases, while engineers use strong motion acceleration, whose peak values are directly related to seismic load on structures. Today it makes less of a difference, since due to advancement in sensor and recording systems, the weak motion instruments can measure rather strong motions and the strong motion sensors are almost as sensitive as the weak motion sensors. The digital recording furthermore makes it easy to convert from acceleration to velocity etc., see Figure 1.2.
1.1 Sensor
Since the measurements are done in a moving reference frame (the earth’s surface), almost all seismic sensors are based on the inertia of a suspended mass, which will tend to remain stationary in response to external motion. The relative motion between the suspended mass and the ground will then be a function of the ground’s motion (Figure 1.3). The swinging system will have a resonance frequency f0
mkf /21
0 != (1.1)
where k is the spring constant and m the mass. If the ground displacement frequency is near the resonance frequency, we get a larger relative motion (depending on damping) and, as it turns out, below the resonance frequency, the relative displacement, due to ground displacement, decreases (Chapter 2).
4
Rangos de amplitud y frecuencia que debe cubrir un sismógrafo.
Respuesta de un sismógrafo.
La respuesta de un sismógrafo depende de la amplitud del movimiento y el
tiempo que toma ese movimiento en producirse.
El comportamiento dinámico de una sismómetro pude describirse, dentro de
su rango de comportamiento lineal como un sistema lineal invariante en el
tiempo (LTI), por lo que se puede describir por medio de 4 formas diferentes:
1. Por medio de una ecuación diferencial.
2. Como una función de transferencia de Laplace.
3. Por medio de una respuesta a frecuencia compleja.
4. Por medio de un sistema de respuesta al impulso.
Sistema Físico
Calibración
4

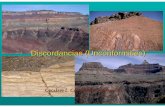
UN EJEMPLO - EL SISMÓGRAFO DE PENDULO
322 11. I N S T R U M E N T S , N O I S E , A N D A N I S O T R O P Y
hinge
viscous fluid
magnet
coil
spring
to amplifierand data recorder
mass
wire
Figure 11.1 A simple inertial seismometer for measuring vertical motion. Movement of thesuspended magnet induces a voltage in the coil; this signal is then amplified and recorded.
function is easily derived for simple inertial seismometers such as that shown inFigure 11.1. Let u(t) be the vertical Earth displacement and z(t) be the displace-ment of the mass with respect to Earth, each relative to their rest positions. Theseismometer case is assumed to be rigidly connected to Earth, and so z(t) alsorepresents the displacement with respect to the case. The absolute displacement ofthe mass is given by the sum u(t) + z(t). The force on the mass from the spring,Fs, will oppose the mass displacement and is given by
Fs = !kz, (11.1)
where k is the spring constant. The viscous damping force, Fd, is proportional tothe mass velocity and is given by
Fd = !Ddz
dt, (11.2)
where D is the damping constant. From F = ma, we thus have
!kz(t) ! Ddz(t)
dt= m
d2
dt2
!u(t) + z(t)
", (11.3)
Shearer
5
Sismógrafo de péndulo.
5

• pizzarón
6

LA RESPUESTA DEL INSTRUMENTO
324 11. I N S T R U M E N T S , N O I S E , A N D A N I S O T R O P Y
0.0
0.5
1.0
1.5
2.0
0.1 1 10Frequency (Hz)
Am
plitu
de
0
90
180
0.1 1 10Frequency (Hz)
Phas
e (d
egre
es)
h = 1/4
1/2
1
24
h = 1/41
4Figure 11.2 The amplitudeand phase response functionsfor a seismometer of 1 Hznatural resonance at variouslevels of damping.Thedamping constant, h, is onefor critical damping.
The strength of the damping relative to the stiffness of the spring may be describedby h = !/"0, where h is the damping constant. When h = 1 (! = "0), the systemis said to be critically damped. Under critical damping, a displaced mass willreturn to its rest position in the least possible time, without “overshooting’’ andoscillating about its rest position. Seismometers generally perform optimally atvalues of damping close to critical. Figure 11.2 plots amplitude and phase responsecurves for a seismometer with a natural (undamped) resonant frequency of 1 Hz (atypical short-period sensor) for values ofh ranging from 1/4 to 4.At high frequencies(" ! "0), Z(") " #1, as follows from (11.12); the amplitude response is nearunity and the phase response is close to # (180$), representing a polarity reversalin the motion. In this case the motion of the mass, relative to the Earth, is simply
324 11. I N S T R U M E N T S , N O I S E , A N D A N I S O T R O P Y
0.0
0.5
1.0
1.5
2.0
0.1 1 10Frequency (Hz)
Am
plitu
de
0
90
180
0.1 1 10Frequency (Hz)
Phas
e (d
egre
es)
h = 1/4
1/2
1
24
h = 1/41
4Figure 11.2 The amplitudeand phase response functionsfor a seismometer of 1 Hznatural resonance at variouslevels of damping.Thedamping constant, h, is onefor critical damping.
The strength of the damping relative to the stiffness of the spring may be describedby h = !/"0, where h is the damping constant. When h = 1 (! = "0), the systemis said to be critically damped. Under critical damping, a displaced mass willreturn to its rest position in the least possible time, without “overshooting’’ andoscillating about its rest position. Seismometers generally perform optimally atvalues of damping close to critical. Figure 11.2 plots amplitude and phase responsecurves for a seismometer with a natural (undamped) resonant frequency of 1 Hz (atypical short-period sensor) for values ofh ranging from 1/4 to 4.At high frequencies(" ! "0), Z(") " #1, as follows from (11.12); the amplitude response is nearunity and the phase response is close to # (180$), representing a polarity reversalin the motion. In this case the motion of the mass, relative to the Earth, is simply
ω0 = 1 Hz
7