2012 uesjls-1d-1at-carlosalfonsoguevaraamaya-120807005048-phpapp01-120808103116-phpapp01
description

UNIVERSIDAD FERMÍN TOROESCUELA DE COMPUTACIÓN
DEPARTAMENTO DE ELECTRÓNICA
TEORIA DE CONTROL II
SISTEMAS DE CONTROL EN TIEMPO DISCRETO
MUESTREO, RECONSTRUCCION Y CONTROLADORES DIGITALES
INTEGRANTES: ALEJO JOHANA
ESCALONA MARIA CAROLINA
COLMENAREZ ANTONIO

SISTEMA DE CONTROL EN TIEMPO DISCRETO
MUESTREO, RECONSTRUCCION Y CONTROLADORES DIGITALES
Asignación
1.- considere el filtro digital definido mediante:
G ( z )= 3+2,2 z−1+0,5 z−2
1+0,5 z−1−0,2 z−2−0,9 z−3
Sea
G ( z )=Y (z )X (z)
= 3+2,2 z−1+0,5 z−2
1+0,5 z−1−0,2 z−2−0,9 z−3
Reordenamos de la siguiente manera:
Y (z )H (z)
∙H (z)X (z)
=(3+2,2Z−1+0,5 Z−2) ∙ 11+0,5Z−1−0,2Z−2−0,9Z−3
De donde:
Y (z )H (z)
=3+2,2 Z−1+0,5Z−2
Y:
H (z)X (z)
= 11+0,5Z−1−0,2Z−2−0,9 Z−3
Como:
Y (z )H (z)
=3+2,2 z−1+0,5Z−2
Despejando Y(z):
Y ( z )=(3+2,2 Z−1+0,5Z−2 )H (z)
Entonces aplicando propiedad distributiva en la multiplicación:

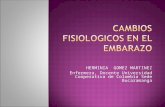
Y ( z )=3H (z)+2,2Z−1H (z )+0,5Z−2H (z)
Cuya programación directa es:
Luego
H (z)X (z)
= 11+0,5Z−1−0,2Z−2−0.9 Z−3
Multiplicamos en cruz
X (Z )=H ( z) ∙(1+0,5 Z−1−0,2Z−2−0,9Z−3)
Aplicamos distributiva
X (Z )=H ( z)+0,5Z−1H ( z )−0,2 Z−2H ( z )−0,9 Z−3H ( z )
Despejamos H(z)
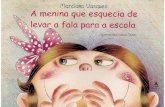
H ( z )=X ( z )−0,5 Z−1H ( z )+0,2Z−2H ( z )+0,9 Z−3H ( z )

Cuya programación directa es:
Uniendo estos dos diagramas de bloques nos queda la programación estándar de G(z) dada:

2.- Suponga que un filtro digital está definido mediante la expresión:
Y ( z)X (z )
= 3+7,5Z−1−9Z−3
1+8,8 Z−1−5,5Z−2+Z−3−3 Z−4
Realice el diseño del filtro digital utilizando Programación Estándar
Reordenamos como:
Y (z )H (z)
∙H (z)X (z)
=(3+7,5Z−1−9Z−3)∙ 11+8,8Z−1−5,5 Z−2+Z−3−3Z−4
De donde:
Y (z )H (z)
=3+7,5 Z−1−9 Z−3
Y
H (z)X (z)
= 11+8,8Z−1−5,5Z−2+Z−3−3Z−4
Como
Y (z )H (z)
=3+7,5 Z−1−9 Z−3
Despejamos Y(z) y nos queda
Y ( z )=(3+7,5 Z−1−9 Z−3 )H ( z )
Aplicando propiedad distributiva
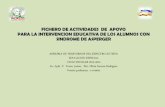
Y (z )=3H ( z)+7,5 Z−1H ( z )−9 Z−3H ( z )
Cuya programación directa es

Para
H (z)X (z)
= 11+8,8Z−1−5,5Z−2+Z−3−3Z−4
Despejamos H(z) como sigue:
Multiplicamos en cruz
X ( z )=H ( z ) (1+8,8Z−1−5,5 Z−2+Z−3−3Z−4 )
Aplicando propiedad distributiva
X ( z )=H ( z )+8,8Z−1H ( z )−5,5 Z−2H ( z )+Z−3H ( z )−3Z−4H ( z )
Despejamos H(z)
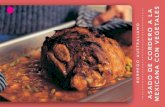
H ( z )=X ( z )−8,8Z−1H ( z )+5,5 Z−2H ( z )−Z−3H ( z )+3Z−4H ( z )
Cuya programación directa es:

Uniendo estos dos bloques nos queda la programación estándar de G(z) dado: