
SISTEMAS EN TIEMPO REAL. MODELOS. …personales.unican.es/corcuerp/Com_Ind/Slides/RCI08.pdf ·...
22
GUÍA DE ESTUDIO TEMA 8. SISTEMAS EN TIEMPO REAL. MODELOS. JERAQUÍA. SINCRONIZACIÓN
-
Upload
truongquynh -
Category
Documents
-
view
213 -
download
0
Transcript of SISTEMAS EN TIEMPO REAL. MODELOS. …personales.unican.es/corcuerp/Com_Ind/Slides/RCI08.pdf ·...

GUÍA DE ESTUDIO TEMA 8.SISTEMAS EN TIEMPO REAL. MODELOS. JERAQUÍA. SINCRONIZACIÓN

Nuria Oliva Alonso – Tutora Las Rozas RCI 2006/2007 – Tema 8. 2
OBJETIVOS
Presentar la evolución histórica de los procesos industriales.Clasificar los procesos industriales e introducir algunos conceptos previos para los temas siguientes, relacionados con las características temporales de cada uno.

Nuria Oliva Alonso – Tutora Las Rozas RCI 2006/2007 – Tema 8. 3
CARACTERÍSTICAS DE LAS REDES DE COMUNICACIÓN INDUSTRIAL
Objetivos de los sistemas de comunicación en general:Intercambio de datosCompartir recursos.
De los sistemas de comunicación industriales en particular:
Coordinar acciones de unidades automatizadasControlar la transferencia de componentes, a través del intercambio de datos entre las diferentes unidades que controlan el proceso productivo.Monitorizar y modificar estrategias de control desde el puesto de operación.Aumentar la confiabilidad y seguridad en los procesos de producción mediante: detección temprana de condiciones de alarma, supervisión y control continúo de procesos de alto riesgo, verificación del estado de las instalaciones y seguimiento de las condiciones de operación de estaciones remotas.Proveer servicios de transmisión de voz e imágenes.Integración completa del proceso productivo
Nuria Oliva Alonso – Tutora Las Rozas RCI 2006/2007 – Tema 8. 4
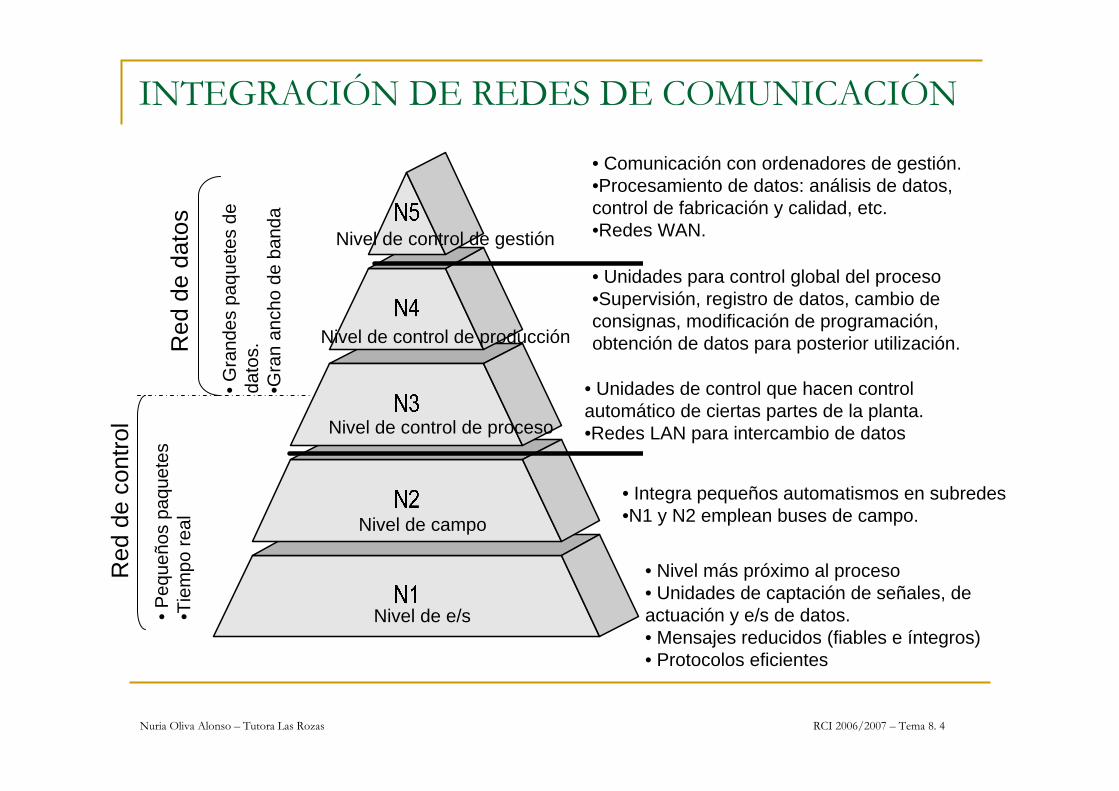
INTEGRACIÓN DE REDES DE COMUNICACIÓN
Nivel de e/s
Nivel de campo
Nivel de control de proceso
Nivel de control de producción
Nivel de control de gestión
Red
de
dato
s
Red
de
cont
rol
• Nivel más próximo al proceso• Unidades de captación de señales, de actuación y e/s de datos.• Mensajes reducidos (fiables e íntegros)• Protocolos eficientes
• Integra pequeños automatismos en subredes •N1 y N2 emplean buses de campo.
• Unidades de control que hacen control automático de ciertas partes de la planta.•Redes LAN para intercambio de datos
• Unidades para control global del proceso•Supervisión, registro de datos, cambio de consignas, modificación de programación, obtención de datos para posterior utilización.
• Comunicación con ordenadores de gestión.•Procesamiento de datos: análisis de datos, control de fabricación y calidad, etc.•Redes WAN.
•Gra
ndes
paq
uete
s de
da
tos.
•Gra
n an
cho
de b
anda
•Peq
ueño
s pa
quet
es•T
iem
po re
al
Nuria Oliva Alonso – Tutora Las Rozas RCI 2006/2007 – Tema 8. 5
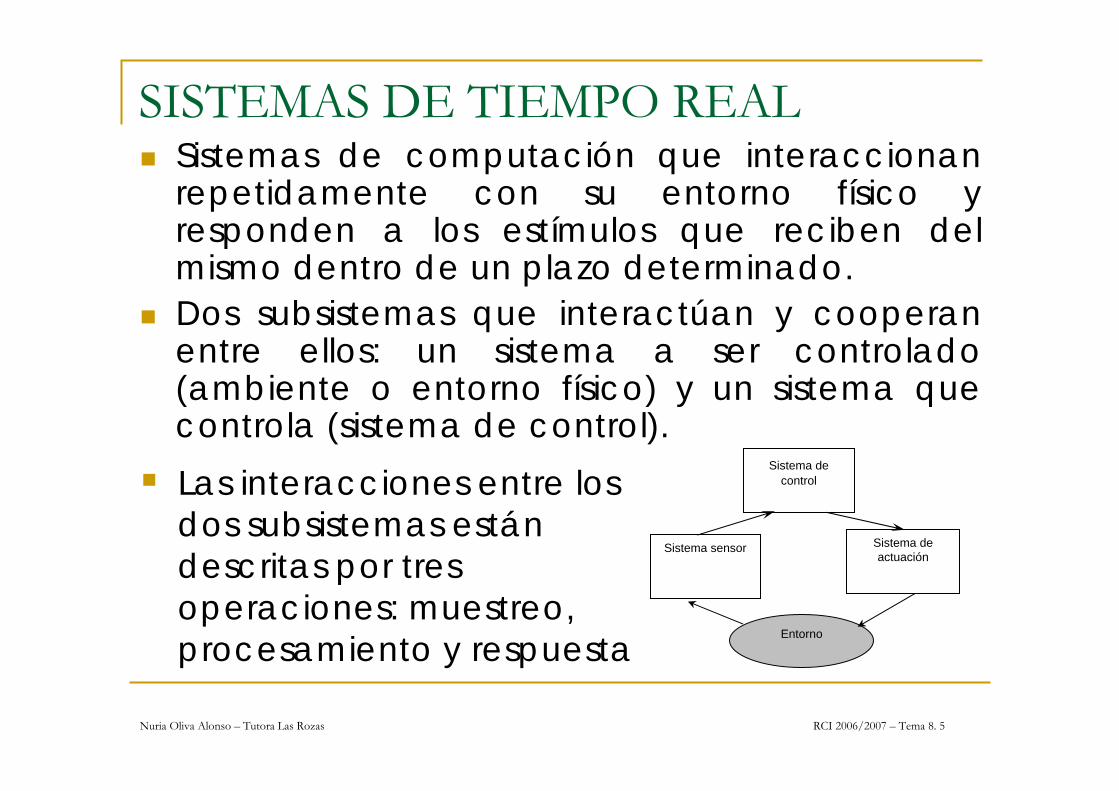
SISTEMAS DE TIEMPO REALSistemas de computación que interaccionan repetidamente con su entorno físico y responden a los estímulos que reciben del mismo dentro de un plazo determinado. Dos subsistemas que interactúan y cooperan entre ellos: un sistema a ser controlado (ambiente o entorno físico) y un sistema que controla (sistema de control). Las interacciones entre los dos subsistemas están descritas por tres operaciones: muestreo, procesamiento y respuesta
Sistema decontrol
Sistema sensor Sistema de actuación
Entorno
Nuria Oliva Alonso – Tutora Las Rozas RCI 2006/2007 – Tema 8. 6
COMUNICACIÓN EN TIEMPO REALSistema distribuido de control en tiempo real: a nivel de campo tiene sensores, controladores y actuadores interconectados por una red de comunicación formando un lazo de control.Comunicación en tiempo real: comunicación con restricciones temporales.Sistema de comunicación en tiempo real:nodos, servicios y protocolos que permiten el intercambio de correcto y a tiempo de los datos.
Backbone del sistema distribuido de tiempo real.Perder comunicaión = perder servicios del sistema ⇒componente crítico.

Nuria Oliva Alonso – Tutora Las Rozas RCI 2006/2007 – Tema 8. 7
COMUNICACIÓN EN LOS SISTEMAS DISTRIBUIDOS DE CONTROL EN TIEMPO REAL
El intercambio de datos en un sistema distribuido se realiza utilizando mensajes, que contienen los datos y la información de control Cada mensaje se divide en paquetes de tamaño fijo, Etapas del proceso de comunicación:
Generación y colocación en cola del mensaje: creación del mensaje y división en paquetes de tamaño fijo. Cada paquete debe ser puesto en la cola de transmisión.Acceso al dispositivo de comunicación: el paquete espera a que el dispositivo de comunicación quede libre.Transmisión del mensaje por el enlace físico. El tiempo de transmisión de cada paquete vendrá determinado por su longitud y por la velocidad de transmisión del dispositivo.Recepción y composición del mensaje: recibidos todos los paquetes se deberá formar el mensaje original y notificar a la tarea destino.
Nuria Oliva Alonso – Tutora Las Rozas RCI 2006/2007 – Tema 8. 8
SISTEMAS DISPARADOS POR TIEMPO Y POR EVENTOS
El sistema de cálculo está distribuido ⇒ la base de datos estátambién distribuida ⇒ validez en el tiempo = después de cierto intervalo del tiempo no es válida (exactitud temporal). La exactitud temporal puede ser llevada a cabo a través de dos aproximaciones:
Sistemas disparados por eventos: el sistema de control es notificado de algún cambio significativo en el estado del ambiente (evento externo) o en el estado interno del controlador(acontecimiento interno). A partir de la recepción de tal acontecimiento el sistema de control toma las acciones apropiadas. Usualmente incluyen un requerimiento que el sistema debe responder dentro de un máximo tiempo dado para un evento particular.
Aplicación: control de alarmas y averías.Sistemas disparados por tiempo: las acciones de control se activan en instantes de tiempo predeterminados, a intervalos de tiempo regulares ⇒ el sistema está formado por acciones activadas periódicamente.
Aplicación: control continuo con muestreo periódico.

Nuria Oliva Alonso – Tutora Las Rozas RCI 2006/2007 – Tema 8. 9
MENSAJES CRÍTICOS Y NO CRÍTICOSCríticos: cuando la pérdida de su plazo puede causar consecuencias catastróficas sobre el sistema. Típicamente los sistemas de tiempo real críticos involucran vidas humanas.Acríticos: cuando la pérdida de su plazo decrementa el rendimiento del sistema pero no llega a poner en peligro su correcto comportamiento. Ej. Sistemas de adquisición de datos remotos.Otros parámetros que caracterizan una tarea en tiempo real:
Retraso en la activación de una tarea: desfase entre el inicio de la tarea y el instante en el que el sistema se da por enterado.JiRetraso (jitter)
Tiempo en el cual la tarea finaliza su ejecución.fiTiempo de finalización
Tiempo en el cual la tarea comienza su ejecución.siTiempo de comienzo
Tiempo antes del cual una tarea deberá ser completada.diPlazo
Tiempo necesario de recurso para ejecutar la tarea sin interrupción.Ci
Tiempo de cálculo o cómputo
Tiempo en el cual la tarea está lista para su ejecución, también es referido como el tiempo de liberación o tiempo de solicitud.aiTiempo de llegada
DescripciónParámetro
Nuria Oliva Alonso – Tutora Las Rozas RCI 2006/2007 – Tema 8. 10
PLANIFICACIÓN DE MENSAJES EN TIEMPO REAL
La planificación es necesaria cuando varias tareas necesitan hacer uso de un mismo recurso de forma concurrente.Planificar = definir reglas de uso de los recursos.Conjunto de reglas que definen el orden en que las tareas acceden al recurso = algoritmo de planificación.Sistema de tiempo real planificable = en función de la política elegida, satisface todos los requisitos temporales impuestos.Objetivos de las políticas de planificación:
Ser predecible = asegurar tiempos de ejecución finitos.Gestionar recursos compartidos ⇒ alta utilización.Tratar eventos.Recuperación ante fallos hw y sw.Sencillo de implementar. Mejor disponible comercialmente.

Nuria Oliva Alonso – Tutora Las Rozas RCI 2006/2007 – Tema 8. 11
Test de planificabilidad: cálculo de los tiempos de respuesta en el peor de los casos. Deben ser siempre menores que los plazos de ejecución.Planificación con desalojo: una tarea es desalojada por otras tareas si puede ser interrumpida en algún momento, tal que una tarea más importante que llegue al sistema pueda inmediatamente tomar el recurso.
Las tareas asociadas a procesos sin interrupción no pueden tolerar el desalojo. La mayoría de los algoritmos de planificación actuales utilizan el desalojo ya que esta clase de planificación es más eficiente
Planificación sin desalojo: una vez que una tarea es iniciada, la misma es ejecutada en el recurso hasta su finalización.
El desalojo no está permitido a nivel de transicción.
PLANIFICACIÓN DE MENSAJES EN TIEMPO REAL

Nuria Oliva Alonso – Tutora Las Rozas RCI 2006/2007 – Tema 8. 12
PRIORIDADES ESTÁTICAS Y DINÁMICASA cada tarea τi se le asigna una prioridad pi la cual indica la importancia que tiene la tarea con respecto a las otras tareas en el sistema. ∀ t: pa > pb ⇒ la ejecución de τa es más importante que la de τb∧ τb puede ser retrasada a favor de τa. Planificación estática:
Basada en un conocimiento a priori completo de los requisitos del sistema y sus restricciones temporales. Se realiza en tiempo de compilación. Produce una planificación fija, que se mantiene durante todo el tiempo de funcionamiento del sistema.
Planificación dinámica:Los requisitos del sistema y sus restricciones temporales varían con el tiempo y por lo tanto la planificación cambia en el tiempo.La planificación dinámica es más eficiente, pero la implementación es más complicada.
Planificación cíclica: (estática) Permite planificar un conjunto de tareas periódicas, independientes y con plazo igual a su período. Poco flexible.Tablas de planificación: ciclo principal y ciclos secundarios.

Nuria Oliva Alonso – Tutora Las Rozas RCI 2006/2007 – Tema 8. 13
ALGORITMOS DE PLANIFICACIÓN1
Rate MonotonicAsigna prioridades a las tareas de acuerdo a su tasa de solicitud: tareas con períodos cortos tendrán una alta prioridad Puesto que los períodos son constantes, RM es estático. Permite el desalojo
Deadline MonotonicA cada tarea se le asigna una prioridad inversamente proporcional a su plazo relativo: la tarea con el plazo relativo más corto se ejecuta. El plazo relativo es constante, DM es estático. Usa desalojo en su planificación.Este método se basa en el cálculo de los tiempos de respuesta (R) en el peor caso para cada tarea.
El peor tiempo de respuesta, para tareas con alta prioridad, es igual a su tiempo de cómputo (esto es, R=C). Sin embargo, las tareas con prioridad baja y media sufrirán interferencia producidas por las tareas con alta prioridad.
Earliest Deadline FirstDinámico con desalojo.Asigna mayor prioridad a las tareas con plazo de finalización más próximo. Para tareas periódicas como aperiódicas.
1 Consultar los ejemplos del libro base de cada algoritmo
Nuria Oliva Alonso – Tutora Las Rozas RCI 2006/2007 – Tema 8. 14
ASIGNACIÓN DE PRIORIDADESEl mecanismo de determinación y asignación de prioridades tiene dos grandes vertientes:
1. La correspondiente a la asignación de prioridades a tareas, mensajería o acciones concurrentes (apartado anterior).
2. La correspondiente a la gestión y aplicación de las prioridades. Gestión de las prioridades: mecanismo que sigue el planificador de tareas o de mensajes al asignar el recurso compartido (CPU o red) a cada una de las tareas o mensajes.
Sistemas de comunicación con exploración cíclica (paso de testigo), la prioridad de la mensajería está condicionada, en cada instante, por la posición relativa del testigo respecto el nodo con mensaje a transmitir.
En el peor caso, el tiempo de espera de transmisión de un mensaje sería el tiempo transcurrido entre que este mensaje está pendiente de transmitir justo cuando el nodo ha enviado el testigo al siguiente nodo del anillo lógico, hasta que le vuelve el testigo al nodo, más la espera en el nodo propio para la transmisión de los mensajes en espera que tengan mayor prioridad.
Sistemas de asignación de mensajería por consulta: las prioridades relativas dependen del mecanismo de consulta que tenga el nodo principal. Este nodo suele disponer de listas cíclicas múltiples y las prioridades dependen de cómo se ejecutan dichas listas. Sistemas de comunicación: asignan dos tipos de prioridades:
Prioridades correspondientes a los distintos nodosPrioridades correspondientes a la estructura interna de cada nodo.. Estos sistemas suelen modificar las prioridades internas relativas de los buffer para permitir que incluso los mensajes de mayor prioridad puedan ser transmitidos en un tiempo máximo determinado.
Nuria Oliva Alonso – Tutora Las Rozas RCI 2006/2007 – Tema 8. 15
ANÁLISIS de SIST. DIST. TPO. REALEl análisis de sistemas distribuidos de control es más complejo respecto al caso de un procesador .Es necesario considerar el análisis del sistema de comunicación entre los diferentes procesadores involucrados en el proceso.La red no permite desalojo de mensajes ⇒ se debe considerar el bloqueo del dispositivo de comunicación debido a la transmisión de mensajes.

Nuria Oliva Alonso – Tutora Las Rozas RCI 2006/2007 – Tema 8. 16
MODELOS JERÁRQUICOS Y ANÁLISISLos modelos jerárquicos responden a la necesidad de organizar de manera sistemática las características tanto de los sistemas de fabricación como de los sistemas de comunicación.Establecen relaciones:
De dependencia vertical que analizan y definen las interfaces entre niveles adyacentes.
Se consigue dividir el conjunto en una serie de submodelos, caracterizados por sus interfaces inferior y superior y por unas especificaciones que permite suministrar servicios al nivel superior y solicitar servicios al nivel inferior.
De dependencia horizontal se contemplan las aplicaciones y sus interacciones entre extremos.
El control jerárquico es el resultado de la subdivisión jerárquica del proceso.
Nuria Oliva Alonso – Tutora Las Rozas RCI 2006/2007 – Tema 8. 17
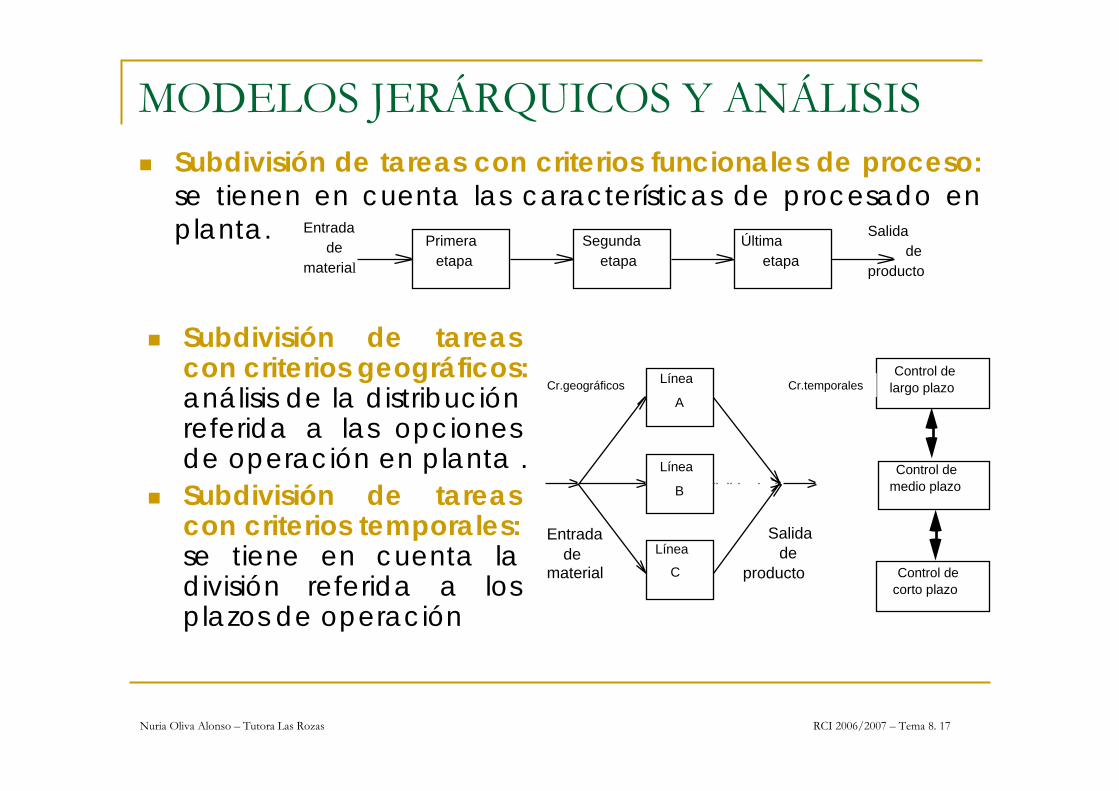
Subdivisión de tareas con criterios funcionales de proceso:se tienen en cuenta las características de procesado en planta.
Subdivisión de tareas con criterios geográficos:análisis de la distribución referida a las opciones de operación en planta .Subdivisión de tareas con criterios temporales:se tiene en cuenta la división referida a los plazos de operación
MODELOS JERÁRQUICOS Y ANÁLISIS
Primera etapa
Segunda etapa
Últimaetapa
Entrada de
material
Salida de
producto
Control de corto plazo
Control de medio plazo
Control de largo plazo
Línea
C
Línea
B
Línea
A
Entrada de
material
Salida de
producto
a) b) Cr.geográficos Cr.temporales
Nuria Oliva Alonso – Tutora Las Rozas RCI 2006/2007 – Tema 8. 18
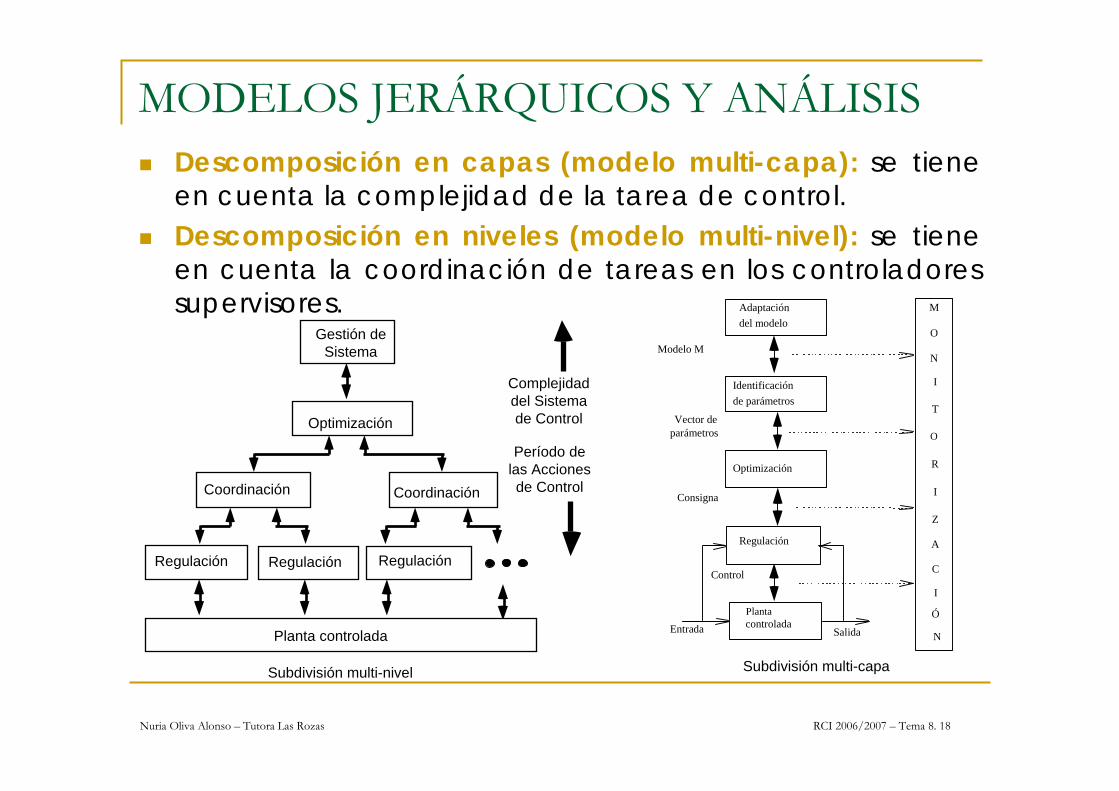
Descomposición en capas (modelo multi-capa): se tiene en cuenta la complejidad de la tarea de control. Descomposición en niveles (modelo multi-nivel): se tiene en cuenta la coordinación de tareas en los controladores supervisores. M
O N I
T
O
R I
Z A
C
I
Optimización
Identificación de parámetros
Adaptación del modelo
Regulación
Planta controlada
Modelo M
Vector de parámetros
Consigna
Control
Entrada Salida
Ó
N
Gestión de Sistema
Coordinación
Optimización
Planta controlada
Regulación Regulación Regulación
Coordinación
Complejidaddel Sistemade Control
Período de las Acciones de Control
Subdivisión multi-nivel Subdivisión multi-capa
MODELOS JERÁRQUICOS Y ANÁLISIS
Nuria Oliva Alonso – Tutora Las Rozas RCI 2006/2007 – Tema 8. 19
Estas estructuras jerárquicas, referidas a los sistemas distribuidos de control, tienen las siguientes características:
ModularidadLegibilidad del softwareReconfigurabilidadExtensibilidadCompatibilidadFiabilidadSeguridad de funcionamientoMantenibilidadOperación degradable
Están formadas por los siguientes componentes:
ControladoresComunicación Hombre-MáquinaComunicaciones con dispositivosMódulos, pantalla gráfica, menú, algoritmos, redundancia, enlace, diagnosis, estadísticas, etc.Sistema de bases de datos distribuido. Gestor.
MODELOS JERÁRQUICOS Y ANÁLISIS
Realizan las siguientes Tareas:Garantizar la operación normal de la plantaSupervisión y gestión de las alarmes. Control y supervisión. Control estadístico. Gestión de versiones. Actualización. Históricos. Análisis de tendencias. Mantenimiento preventivo y predictivo.

Nuria Oliva Alonso – Tutora Las Rozas RCI 2006/2007 – Tema 8. 20
SINCRONIZACIÓN entre APLICACIONES DISTRIBUIDAS
Las aplicaciones distribuidas se sincronizan mediante mecanismos de interacción mutua.Se utilizan semáforos para indicar la disponibilidad de uso de sistemas compartidos.
Los semáforos son mecanismos de señalización que buscan la exclusión mutua de los recursos compartidos. Este semáforo, en su estructura más básica, consiste en una palabra binaria de estado que indica que estáocupado o libre:
En situación de libre, las tareas externas la pueden utilizar. En situación de ocupado deben esperar o buscar otro recurso.
Dado que el propio semáforo es un recurso compartido, en determinadas ocasiones el semáforo puede estar representado por una estructura más compleja.
Nuria Oliva Alonso – Tutora Las Rozas RCI 2006/2007 – Tema 8. 21
Estos mecanismos de sincronización pueden provocar:Bloqueos: situación en la que, por razón de la ejecución de algún algoritmo o de alguna parte de protocolo, el sistema es incapaz de avanzar según los parámetros establecidos.
Se pueden prevenir los bloqueos: con técnicas defensivas de programación (mediante la explicitación de todas las condiciones posibles y alternativas en los saltos condicionados).Se pueden solucionar las situaciones de bloqueo: utilizar temporizadores de actividad o paso (watchdog, perros de presa).
Abrazos mortales: tipo especial de bloqueo entre actividades o acciones concurrentes fuertemente sincronizadas. Una de las acciones se queda a la espera que la otra acción llegue a una condición de sincronización. Pero esta a su vez, también se queda a la espera de una acción de sincronización de la otra.
Para resolver este abrazo se suelen utilizar sincronizadores u otros elementos de supervisión externos. También se suelen utilizar temporizadores watchdog.Son difíciles de localizar en aplicaciones distribuidas por lo que se suelen utilizar técnicas de programación concurrente que permitan reducir los bloqueos
SINCRONIZACIÓN entre APLICACIONES DISTRIBUIDAS

Nuria Oliva Alonso – Tutora Las Rozas RCI 2006/2007 – Tema 8. 22
CONCLUSIONESEn el momento actual, los procesos industriales no se entienden sin redes de comunicaciones.Los distintos procesos existentes (continuos, discretos, por lotes) tienen exigencias temporales diferentes que tienen que ser satisfechas por las redes de forma satisfactoria.Los procesos en tiempo real exigen planificación de tareas y gestión de asignación de prioridades.Los modelos jerárquicos responden a la necesidad de organizar de manera sistemática las características tanto de los sistemas de fabricación como de los sistemas de comunicación.Las aplicaciones distribuidas se sincronizan mediante mecanismos de interacción mutua. Utilizan semáforos. Deben evitar bloqueos y abrazos mortales.


















