Sma presentation-bani-hotel-larroque
26
-
Upload
stephen-larroque -
Category
Technology
-
view
57 -
download
0
Transcript of Sma presentation-bani-hotel-larroque


Simulation de drones pour l’escorte de convois
Issam BANI
Olivier HOTEL
Stephen LARROQUE
Projet de simulation multi-agents en NetLogo
28 Mars 2014

Cadre
• NetLogo3D 5 avec extension BDI+FIPA
• Scénario:– convoi humanitaire qui doit atteindre un but– une voiture à protéger contre les ennemis
• Contrôle uniquement les drones (pas le convoi ni les ennemis)
3

Présentation de la simulation• Environnement:
– Dynamique, avec obstacles(montagnes, lacs, rivières et ponts)
– Continu en X et Y– Semi-discrétisé en Z (sol, basse et haute altitudes)
• Mouvements réalistes avec limitation d’angle4

Path Ahead exploration
6

Circular exploration
7

Allocation des stratégies
• Communication des stratégies entre drones
• 1 drone reste avec le convoi
• Les autres choisissent et la communiquent
9

Ennemis et citoyens
• Ennemis:– Fixe– Mobile– Toujours agressifs– Détection par image
• Citoyens:– Agressif ou neutre– Détection par comportement
10

Stratégies d’attaque
• Évitement instinctif(déviation trajectoire par rapport à vision de l’ennemi)
• Détection individus agressif:– Shape-based pour ennemis– Behavior-based pour citoyens
• Si détection positive:– Question au QG: autorisation de tir? Si feu vert:– Regroupement et tir à K drones
11

Communication• Architecture BDI + FIPA ACL
• Asynchrone, P2P et distribuée (infos locales, ex: position du convoi)
• Communications:– convoi → drones– drones → drones
• Couverture wifi limitée → Scattering problem
• Relai haute-altitude avec QG12

Broadcast
13

Relay
14

Relay
15

Replay - Keep-me-posted
16

Scattering problem• Comment ajuster les mouvements des drones
pour rester dans la couverture de communication?
• Connectivity-Preserving Scattering algorithm
• Permet de diminuer la couverture wifi→ + discret, - d’énergie
• Mais suppose que les drones peuvent:– Etre stationnaire → crash– Tourner à des angles absolus → impossible
17
(Gradinariu Potop-Butucaru, 2010)

Conclusion et ouverture• Modèle assez réaliste
(contraintes physiques, gestion des ressources)
• Contrôle et communications décentralisés
• Autonomie et efficacité, bonne coopération avec humains
• Passe à l’échelle: complexité selon agents cognitifs (drones et ennemis) mais pas taille environnement
18

Discussion• Communications fragiles aux attaques spoofing
• Scattering à mieux adapter
• Implémentation en cas réel:– Gestion de l’incertain (position, communications
perdues, etc.)– Hardware: réimplémenter les fonctions NetLogo
de base (extension GoGo?)– Localisation– Vision
19

– Enhancing NetLogo to simulate BDI communicating agents, 2008, Sakellariou, I., Kefalas, P., & Stamatopoulou, I. In Artificial Intelligence: Theories, Models and Applications (pp. 263-275). Springer Berlin Heidelberg.
– Connectivity-Preserving Scattering of Mobile Robots with Limited Visibility, 2010, Taisuke Izumi, Maria Gradinariu Potop-Butucaru, Sébastien Tixeuil, SSS 2010: 319-331
Références

Merci!

Slides Bonus

Les agents
• 4 types d’agents:– Convoi– Drone– Ennemi (mobile ou immobile)– Citoyen (dangereux ou pacifique)
26

Les agents - 2
• Drones cognitifs, BDI et FIPA
• Limites de ressources (fuel, munitions)Gestion par distance/temps à la base
• Convoi:– Quelques leaders, les autres suiveurs– Planification A*– Scinde si danger ou voiture détruite– Utilisateur peut prendre contrôle (simule mieux
comportement humain)27
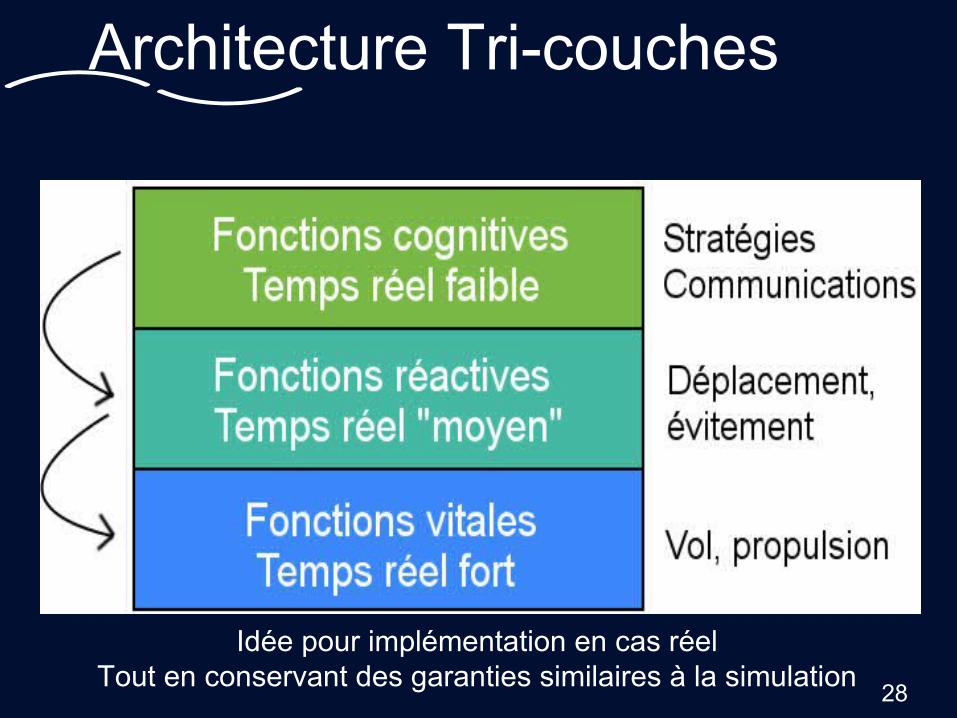
Architecture Tri-couches
28
Idée pour implémentation en cas réelTout en conservant des garanties similaires à la simulation

Algorithme CPS
29
(Gradinariu Potop-Butucaru, 2010)

Algorithme CPS
30
(Gradinariu Potop-Butucaru, 2010)

THE END