SPIE DSS 2013 Presentation

of 25
Transcript of SPIE DSS 2013 Presentation
-
8/10/2019 SPIE DSS 2013 Presentation
1/25
-
8/10/2019 SPIE DSS 2013 Presentation
2/25
Objectives
To detect intrusions on the Energy Pipeline ROW.
To prevent any damage to underground energy pipelines due to heavy weightof vehicles
To detect and classify various types of construction machinery on ROW
To validate algorithms on each of database New Era, ATE, GeoEye, AmericanAerospace
To cross-validate the algorithm between the databases
Backhoe Skid Steer TrencherExcavator Mini-
Excavator
Excavator Backhoe
New Era Dataset
ATE Dataset
-
8/10/2019 SPIE DSS 2013 Presentation
3/25
Problem Statement
To establish a novel object detection algorithm which satisfies different
challenges (Real life problems) Low and overly exposed illumination; cast shadows
Different viewpoint, scale and orientation
Varying resolution, motion blur
Purpose: Generalize the algorithm parameters for all the datasets
Developed with the mindset for implementation on GPUs and multi-coreprocessor.
Have a deployable real-time system which works on the fly
Low
Illumination
Cast
Shadows
Different
Viewpoint
Motion BlurHigh
Illumination
Different
Orientation
Different
Scale
GTX-680 1532
cores
-
8/10/2019 SPIE DSS 2013 Presentation
4/25
Characteristics of Local Phase Domain
Analysis is done local phase domain to tackle the issue of non-uniform
illumination. This local phase will characterize a construction equipment from the
surrounding background(trees, buildings etc..)
It is illumination invariant
Not affected by over exposure to lighting, very low illumination conditions
Brings out the edges/corners of the machine
Backhoe Flight 8 Local Phase Backhoe Flight 6 Local Phase
-
8/10/2019 SPIE DSS 2013 Presentation
5/25
Constraints of Local Phase Domain
Rotation/Scale variant
requires a preliminary stage to get a shortlist of possible object regions ofsuitable scale and orientation
View point variant
a global descriptor feature set which is partially invariant to viewpointchanges ( global histogram of the local phase values in a region)
Motion blurring and varying resolution Using multi-resolution image representation to extract local phase
New Era Dataset ATE Dataset
-
8/10/2019 SPIE DSS 2013 Presentation
6/25
METHODOLOGY
-
8/10/2019 SPIE DSS 2013 Presentation
7/25
-
8/10/2019 SPIE DSS 2013 Presentation
8/25
Training
Generation of Log-Gabor filters for local phase computation.
Computation of local phase of template using the Log-Gabor filters to
create frequency scale-space representation.
Will account for some amount of resolution changes.
Extension to multiple template sizes (scale) Will account for objects with different sizes
Local
Phase
Template Selection
Local
Phase
-
8/10/2019 SPIE DSS 2013 Presentation
9/25
Local Phase based Template Matching
Multi-Scale Multi-Orientation Matching of test image with template in
local phase domain
Matching of template at multiple rotations of image using normalized cross
correlation.
Select the most optimal match at each orientation using a global histogram
matching technique at each rotation of image.
Template
Matching
Matching at different
Orientation
Test Image Search Region
-
8/10/2019 SPIE DSS 2013 Presentation
10/25
Orientation Selection and Cluster Voting
Selection of the correct orientation within a search region
Compute local phase matching for every scale and frequency band to get aset of detections for the single selected orientation.
Hierarchical clustering to find groups of detection points within a searchregion.
Apply Voting Mechanism
Each detection in a group/cluster will be assigned a vote based on the Earthmovers distance between template and region. (Green highest vote)
Select
Orientation
Voting
Scheme
Multi-Scale Multi-
Orientation Matching
Single Orientation Multi-
Scale Detections
Voting
-
8/10/2019 SPIE DSS 2013 Presentation
11/25
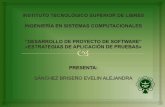
Detection using HOP
Automatic selection of cluster groups in whole image with minimum
number of votes.
Compute Histogram of Oriented Phase (HOP) for each detection.
Compare HOP descriptor with that of template and compute number of
HOP hits for selected cluster groups.
Retain the cluster groups with minimum number of HOP hits.
HOP Matching
Selected Cluster Group Final Detection Zoomed in View of Final
Detection
Zoomed
in View
-
8/10/2019 SPIE DSS 2013 Presentation
12/25
DATASET ILLUSTRATIONAND RESULTS
-
8/10/2019 SPIE DSS 2013 Presentation
13/25
Image From New Era Dataset
-
8/10/2019 SPIE DSS 2013 Presentation
14/25
Image from GeoEye Dataset
-
8/10/2019 SPIE DSS 2013 Presentation
15/25
Image from AAAI dataset
-
8/10/2019 SPIE DSS 2013 Presentation
16/25
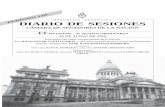
Statistics ( New Era Dataset)
Equipment/Stages Stage1 Stage 2 Stage 3 False positives
Backhoe (Flight)
1(2) Y Y Y 0
2(3) Y Y Y 0
3(4) Y X X
4(5) Y Y Y 1
5(6) Y Y Y 0
6(7) Y Y Y 1
7(8) Y Y Y 0
Total False Positives 2
True Detection Rate 100.00% 85.71% 85.71%
False Detection Rate 5.88%
-
8/10/2019 SPIE DSS 2013 Presentation
17/25
Statistics ( Geo Eye)Equipment/Stages Stage1 Stage 2 Stage 3 False positives
ATV
1 Y Y Y 3
2 Y Y Y 1
3 Y Y Y 4
4 Y Y Y 0
5 Y Y Y 1
6 Y Y Y 0
7 Y X X
8 Y Y Y 6
9 Y Y Y 0
Total False Positives 15
True Detection Rate 100% 88.9% 88.9%
False Detection Rate 30.61%
-
8/10/2019 SPIE DSS 2013 Presentation
18/25
-
8/10/2019 SPIE DSS 2013 Presentation
19/25
Reason for Non-detection
Overexposed lighting on the equipment which washes out the
features on the object required for detection.
Possible solution:- Non-linear enhancement of the region of
interest and super-resolution of region to get back the features.
Flight 3 Backhoe in successive frames
Flight 1
Backhoe
(Training Set)
-
8/10/2019 SPIE DSS 2013 Presentation
20/25
FUTURE WORK
-
8/10/2019 SPIE DSS 2013 Presentation
21/25
Removal of Sensor Noise
Noise due to the sensor properties
Will contain artifacts which can interfere with object pattern.
Gaussian
Filtering(Specific
Parameters)
-
8/10/2019 SPIE DSS 2013 Presentation
22/25
Multi-Resolution Image Space Representation
Use a multi-resolution image space representation for computing local phase.
Previous
Method
New
Method
-
8/10/2019 SPIE DSS 2013 Presentation
23/25
Kernel-based Local Phase Density Estimation
Instead of computing histogram of phase, we use a Gaussian Kernel to estimate
actual local phase density.
Histogram of Phase Descriptor for Backhoe
-
8/10/2019 SPIE DSS 2013 Presentation
24/25
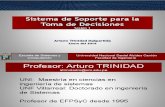
Kernel-based Local Phase Density Estimation
Advantage: Improves the detection as we care comparing true density
distributions
Local Phase Density computed using Kernel.
(Left : no binning, Right: Binned version)
-
8/10/2019 SPIE DSS 2013 Presentation
25/25
Thank You
Questions?