TDP da Equipe de Futebol de Robos Red Dragons UFSCarˆ...
5
TDP da Equipe de Futebol de Robˆ os Red Dragons UFSCar Categoria IEEE Very Small Size Nat´ alia S. Andrade 1 , Fernando S. Fernandes 1 , Gleyson Oliveira 1 ,Vin´ ıcius I. P. Cunha 1 , Saulo B. Chaves 1 , Willer G. M. Paternostro 1 , Beatrice S. de Almeida 1 , Isabela C. Martins 2 , Hellen O. Di´ ogenes 2 , Guilherme Luiz da Cunha 1 , Alessandra de M. Souza 2 , Bruno T. Magalh˜ aes 1 , Yuri A. Russignoli 2 , Felipe A. Santos 1 E-mail: [email protected] Abstract— Neste Team Description Paper - TDP ´ e descrito o sistema de futebol de robˆ os que ser´ a utilizado pela equipe Red Dragons UFSCar em seu segundo ano de competic ¸˜ ao na cate- goria IEEE Very Small Size. O artigo apresenta uma descric ¸˜ ao do trabalho realizado por quatro ´ areas do grupo: Mecˆ anica, Eletrˆ onica, Vis˜ ao Computacional, e Controle e Estrat´ egia. I. INTRODUC ¸ ˜ AO Uma competic ¸˜ ao de futebol de robˆ os consiste em uma arena, dois times com trˆ es rob ˆ os, um t´ ecnico, um computador respons´ avel por gerar as estrat´ egias para cada jogador e uma cˆ amera CCD situada acima do campo que ´ e respons´ avel por obter as imagens que ser´ a utilizadas pelo t´ ecnico para gerar novas estrat´ egias para o time. Estas estrat´ egias ser´ a executadas pelo robˆ o atrav´ es de um controlador. Tecnicamente, o futebol de robˆ o´ e um jogo competitivo que produz elevadas demandas em todos as ´ areas de tecnolo- gia rob´ otica como mecˆ anica, controle, sensores, comunicac ¸˜ ao e inteligˆ encia, [2]. Desse modo, necessita de uma equipe com conhecimentos multidisciplinares. Pensando nisso, a equipe de Futebol de Robˆ os da Universidade Federal de S˜ ao Carlos, os Red Dragons UFSCar ´ e formada por alunos dos cursos de Engenharia El´ etrica, Engenharia Mecˆ anica, Engenharia F´ ısica, Engenharia da Computac ¸˜ ao, Engenharia de Produc ¸˜ ao e F´ ısica. A equipe tamb´ em conta com o apoio do Grupo de Rob´ otica e da Pr´ o-Reitoria de Extens˜ ao da UFSCar desde 2014, ano no qual participou da sua primeira competic ¸˜ ao na categoria IEEE Very Small Size na XII Competic ¸˜ ao Brasileira de Rob´ otica. A equipe Red Dragons UFSCar est´ a dividida em quatro ´ areas: Mecˆ anica, Eletrˆ onica, Vis˜ ao Computacional, e Con- trole Estrat´ egico. Neste TDP ser´ a descrito a proposta de desenvolvimento do sistema de futebol em cada uma dessas ´ areas. Na Mecˆ anica ser´ a desenvolvido um time de 3 robˆ os estruturalmente idˆ enticos. A carcac ¸a e as pec ¸as do robˆ os ser´ a prototipadas em uma Impressora 3D Prusa Mendel. O projeto mecˆ anico do robˆ o´ e descrito na Sec ¸˜ ao II-B. Na Eletrˆ onica *Este trabalho ´ e financiado pela Pr´ o-Reitoria de Extens˜ ao da UFSCar. 1 Departamento de Engenharia El´ etrica da Universidade Federal de S˜ ao Carlos - UFSCar, Rodovia Washington Luis, Km 235 - Cx. Postal 676 - CEP 13565-905 - S˜ ao Carlos, SP. 2 Departamento de F´ ısica da Universidade Federal de S˜ ao Carlos - UFSCar, Rodovia Washington Luis, Km 235 - Cx. Postal 676 - CEP 13565- 905 - S˜ ao Carlos, SP. ser´ a desenvolvido o hardware do robˆ o. Este sistema ser´ a composto pelo kit desenvolvimento Alevino, unidade de medida inercial, comunicac ¸˜ ao via r´ adio e USB, ponte H, mo- tores de corrente cont´ ınua com reduc ¸˜ ao e encoders. Maiores detalhes desses elementos s˜ ao mostrados na Sec ¸˜ ao III. J´ a a Vis˜ ao Computacional ficar˜ ao respons´ avel pelo algoritmo de localizac ¸˜ ao dos robos e da bola ser´ a desenvolvido em Open CV no Linux. Detalhes da implementac ¸˜ ao do sistema de localizac ¸˜ ao podem ser vistos na Sec ¸˜ ao IV. E por ´ ultimo, a ´ area de Controle Estrat´ egico, ficar´ a respons´ avel pelo controle cinem´ atico do rob ˆ o, do planejamento de trajet ´ oria a partir das informac ¸˜ oes disponibilizadas pela vis˜ ao computacional com desvio de obst´ aculo e pela tomada de decis˜ ao de mudanc ¸a de estrat´ egia. II. PROJETO MEC ˆ ANICO O projeto mecˆ anico ´ e uma parte muito importante do time, uma vez que estrutura a parte f´ ısica dos robˆ os da competc ¸˜ ao. Na primeira competic ¸˜ ao do time Red Dragons, os chassis, as rodas, as engrenagens e os motores foram baseados nas estruturas de outros times, uma vez que o time n˜ ao possu´ ıa nenhuma experiˆ encia em competic ¸˜ oes de futebol de robˆ os, e outras equipes j´ a haviam definido alguns conceitos que pareciam funcionar na pr´ atica. Por estes motivos, a estrutura do ano de 2014 sofreu muita influˆ encia de outros times, dando ao RD uma base com a qual trabalhar. Para a tempo- rada de 2015, o time j´ a possui experiˆ encia para projetar as pr´ oprias modificac ¸˜ oes na estrutura, baseado em observac ¸˜ oes feitas nas competic ¸˜ oes e tamb´ em em aspectos construtivos e de produc ¸˜ ao. Muitos fatores foram simplificados, tornando a construc ¸˜ ao facilitada e a manutenc ¸˜ ao mais simples. Al´ em disso, com a diminuic ¸˜ ao da quantidade de componentes mecˆ anicos na estrutura, os robˆ os agora tˆ em mais espac ¸o para os componentes eletrˆ onicos. A. Ferramentas Como na temporada de 2014, o projeto da mecˆ anica dos robˆ os ´ e realizado no software Inventor, da Autodesk. Este ´ e atualmente utilizado por ser uma ferramenta de facilidade de aprendizado razo´ avel, com precis˜ ao o suficiente para suprir as necessidades de design que o time necessita. Por´ em, se planeja que as vers˜ oes finais da estrutura mecˆ anica para a competic ¸˜ ao seja feita pelo software SolidWorks, grac ¸as a
Transcript of TDP da Equipe de Futebol de Robos Red Dragons UFSCarˆ...

TDP da Equipe de Futebol de Robos Red Dragons UFSCarCategoria IEEE Very Small Size
Natalia S. Andrade1, Fernando S. Fernandes1, Gleyson Oliveira1,Vinıcius I. P. Cunha1, Saulo B. Chaves1,Willer G. M. Paternostro1, Beatrice S. de Almeida1, Isabela C. Martins2, Hellen O. Diogenes2,
Guilherme Luiz da Cunha 1, Alessandra de M. Souza 2, Bruno T. Magalhaes 1, Yuri A. Russignoli2, Felipe A. Santos1
E-mail: [email protected]
Abstract— Neste Team Description Paper - TDP e descrito osistema de futebol de robos que sera utilizado pela equipe RedDragons UFSCar em seu segundo ano de competicao na cate-goria IEEE Very Small Size. O artigo apresenta uma descricaodo trabalho realizado por quatro areas do grupo: Mecanica,Eletronica, Visao Computacional, e Controle e Estrategia.
I. INTRODUCAOUma competicao de futebol de robos consiste em uma
arena, dois times com tres robos, um tecnico, um computadorresponsavel por gerar as estrategias para cada jogador e umacamera CCD situada acima do campo que e responsavelpor obter as imagens que sera utilizadas pelo tecnico paragerar novas estrategias para o time. Estas estrategias seraexecutadas pelo robo atraves de um controlador.
Tecnicamente, o futebol de robo e um jogo competitivoque produz elevadas demandas em todos as areas de tecnolo-gia robotica como mecanica, controle, sensores, comunicacaoe inteligencia, [2]. Desse modo, necessita de uma equipe comconhecimentos multidisciplinares. Pensando nisso, a equipede Futebol de Robos da Universidade Federal de Sao Carlos,os Red Dragons UFSCar e formada por alunos dos cursosde Engenharia Eletrica, Engenharia Mecanica, EngenhariaFısica, Engenharia da Computacao, Engenharia de Producaoe Fısica. A equipe tambem conta com o apoio do Grupo deRobotica e da Pro-Reitoria de Extensao da UFSCar desde2014, ano no qual participou da sua primeira competicao nacategoria IEEE Very Small Size na XII Competicao Brasileirade Robotica.
A equipe Red Dragons UFSCar esta dividida em quatroareas: Mecanica, Eletronica, Visao Computacional, e Con-trole Estrategico. Neste TDP sera descrito a proposta dedesenvolvimento do sistema de futebol em cada uma dessasareas.
Na Mecanica sera desenvolvido um time de 3 robosestruturalmente identicos. A carcaca e as pecas do robos seraprototipadas em uma Impressora 3D Prusa Mendel. O projetomecanico do robo e descrito na Secao II-B. Na Eletronica
*Este trabalho e financiado pela Pro-Reitoria de Extensao da UFSCar.1 Departamento de Engenharia Eletrica da Universidade Federal de Sao
Carlos - UFSCar, Rodovia Washington Luis, Km 235 - Cx. Postal 676 -CEP 13565-905 - Sao Carlos, SP.
2 Departamento de Fısica da Universidade Federal de Sao Carlos -UFSCar, Rodovia Washington Luis, Km 235 - Cx. Postal 676 - CEP 13565-905 - Sao Carlos, SP.
sera desenvolvido o hardware do robo. Este sistema seracomposto pelo kit desenvolvimento Alevino, unidade demedida inercial, comunicacao via radio e USB, ponte H, mo-tores de corrente contınua com reducao e encoders. Maioresdetalhes desses elementos sao mostrados na Secao III. Jaa Visao Computacional ficarao responsavel pelo algoritmode localizacao dos robos e da bola sera desenvolvido emOpen CV no Linux. Detalhes da implementacao do sistemade localizacao podem ser vistos na Secao IV. E por ultimo, aarea de Controle Estrategico, ficara responsavel pelo controlecinematico do robo, do planejamento de trajetoria a partir dasinformacoes disponibilizadas pela visao computacional comdesvio de obstaculo e pela tomada de decisao de mudancade estrategia.
II. PROJETO MECANICO
O projeto mecanico e uma parte muito importante do time,uma vez que estrutura a parte fısica dos robos da competcao.Na primeira competicao do time Red Dragons, os chassis,as rodas, as engrenagens e os motores foram baseados nasestruturas de outros times, uma vez que o time nao possuıanenhuma experiencia em competicoes de futebol de robos,e outras equipes ja haviam definido alguns conceitos quepareciam funcionar na pratica. Por estes motivos, a estruturado ano de 2014 sofreu muita influencia de outros times,dando ao RD uma base com a qual trabalhar. Para a tempo-rada de 2015, o time ja possui experiencia para projetar asproprias modificacoes na estrutura, baseado em observacoesfeitas nas competicoes e tambem em aspectos construtivos ede producao. Muitos fatores foram simplificados, tornando aconstrucao facilitada e a manutencao mais simples. Alemdisso, com a diminuicao da quantidade de componentesmecanicos na estrutura, os robos agora tem mais espaco paraos componentes eletronicos.
A. Ferramentas
Como na temporada de 2014, o projeto da mecanica dosrobos e realizado no software Inventor, da Autodesk. Este eatualmente utilizado por ser uma ferramenta de facilidade deaprendizado razoavel, com precisao o suficiente para supriras necessidades de design que o time necessita. Porem, seplaneja que as versoes finais da estrutura mecanica para acompeticao seja feita pelo software SolidWorks, gracas a

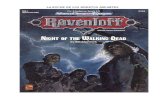
Fig. 1. Chassi Modelo 2014. Fig. 2. Chassi Modelo 2015.Fig. 3. Sistema de mobilidade 2014.
Fig. 4. Sistema de mobilidade 2015. Fig. 5. Vista isometrica superior do robo Modelo2015. Fig. 6. Vista isometrica inferior do robo Modelo
2015.
um curso oferecido por uma empresa parceira do time. Amudanca de software foi considerada por conta da maiorgama de ferramentas e opcoes existentes no SolidWorks, etambem por conta do desenvolvimento pessoal dos membrosdo time Red Dragons. Assim como na temporada de 2014, osrobos para a competicao serao impressos em uma impressora3D. Porem, para a temporada deste ano, as estruturas seraofeitas em um modelo diferente de impressora. No anopassado foi utilizada a impressora Prusa Mendel I3. Apesarde atender as nossas principais necessidades, este modelo deimpressora apresenta dificuldades de producao, uma vez queseu funcionamento depende do controle de temperatura, quenao e muito eficiente. O modelo utilizado para a temporada2015 sera da marca Stratasys, da serie Objet. Este modelopermitira uma impressao precisa e com menos etapas defabricacao, uma vez que possui a possibilidade de impressaode mais de um material na mesma peca, alem de a opcao deimpressao de partes moveis ja montadas.
B. Estrutura dos Robos para 2015Como ja mencionado, algumas partes da estrutura foram
simplificadas, em relacao aos modelos de 2014. A comecarda base, temos a retirada do eixo metalico central, no qual asrodas giravam em falso. As engrenagens nas rodas tambemforam retiradas, assim como as engrenagens dos eixos dosmotores. Ao inves disso, os motores foram alinhados nadirecao do eixo central, mantendo as rodas ligadas direta-mente nos eixos. Foi uma mudanca estrategica, pensandona reducao da complexidade e na diminuicao do numero decomponentes, que facilitaria a producao. A Figura 1 mostraa estrutura do chassi de 2014, e a figura 2, o chassi de2015, para fins de comparacao. As Figuras 3 e 4 comparamos sistemas funcionais da mobilidade do robo dos anos2014 e 2015. A ”carroceria”dos robos foi projetada para se
adaptar a nova disponibilidade das rodas. As ”janelas”para asrodas permanecem, porem nao existe mais a necessidade das”janelas”para as engrenagens. A reentrancia para o encaixeda bola permanece.
III. ELETRONICA
No sistema utilizado havera um sistema de visaocomunicando-se com um computador, esse computador rece-bera dados via radiofrequencia adquirido da UMI (Unidadede Medida Inercial), ele calculara a trajetoria e enviaraa informacao via radiofrequencia para o microcontroladorembarcado no robo. O microcontrolador por sua vez, re-gulara a tensao aplicada aos motores de tracao segundo asinformacoes recebidas do computador. Os sinais do sistemade visao e da UMI serao usadas para fechar a malha decontrole do sistema.
O esquematico da eletronica do robo diferencial da equipeRedDragons esta apresentado na Figura 7 abaixo:

Fig. 7. Esquematico da eletronica.
A. Microcontrolador
O microcontrolador utilizado, inicialmente, sera o AT-mega328, embarcado em uma estrutura chamada de Alevino,as dimensoes e a pinagem dele sao compatıveis com oArduino Nano(ver Figura 8). A vantagem na utilizacao dessechip e a possibilidade de utilizacao da Arduino IDE, comtodas suas facilidades, como suas bibliotecas, que agilizamo processo de programacao do sistema. Para a temporada de2015, sera realizado um estudo para averiguar a possibilidadeda troca do microcontrolador, para o fim de obter um melhore mais rapido processamento de dados.
Fig. 8. Microcontrolador Alevino.
B. Unidade de Medida Inercial
Em cada robo sera implantada uma UMI composta por 9sensores inerciais: 3 giroscopios, 3 acelerometros e 3 mag-netometros (ver Figura 9). A grande vantagem na utilizacaoda UMI esta no fato de que os sensores inercias que acompoe possuem uma rapida atualizacao de suas medicoes,possibilitando uma resposta mais rapidas dos robos.
Fig. 9. Unidade de medida inercial da empresa Circuitar.
A UMI sera utilizada juntamente com o sistema de visaocomputacional para a estimativa de posicao do robo. Serafeita a fusao dos dados dos sensores da UMI atraves de umfiltro complementa.
C. Radio
O sistema de radio utilizado sera o MRF24J40 e umtransmissor e receptor para comunicacao sem fio na faixade 2,4GHz, usando o protocolo 802.15.4, que e a basede padroes como ZigBee e 6LoWPAN (ver Figura 10).O modulo possui uma taxa de transferencia de 250Kbps.O 802.15.4 e o mesmo protocolo utilizado por outrostransceptores wireless bastante populares, como o XBee, eoferece funcionalidades basicas de gerenciamento de rede,enderecamento dos modulos e controle de acesso ao meiocom gerenciamento de colisoes e retransmissao de pacotes. Avantagem na utilizacao desse nanoshield e a compatibilidadede pinos com o Alevino, utilizado para controlar o sistema. Arealizacao da comunicacao na temporada 2015 sera realizadaatraves de uma palavra de dados geral para os robos, ondecada indivıduo sera responsavel pelo levantamento da seuproprio comando, descartando assim, os comandos desti-nados a outros robos. Tal mudanca de metodologia faracom que a comunicacao se realize de forma mais rapida docomputador para com os robos.

Fig. 10. Sistema de comunicacao via radio da empresa Circuitar.
D. Driver
O driver de potencia utilizado sera uma ponte H A3909da Allegro embarcada em um nanoshield no formato deArduino nano para facilitar a utilizacao com o resto dosistema. O A3909 e um driver de motor duplo de pontecompleta, projetada para aplicacoes de potencia media, assaıdas sao classificados para operacao atraves de um intervalode alimentacao de 4 a 18 V, e capaz de trabalhar com ate 1A por fase. Sua escolha se deu devido ao tamanho reduzidodo CI e simplicidade na utilizacao em conjunto com o restodo sistema.
E. Serial
Sera utilizado um nanoshield usb (ver Figura 11) junto aoalevino para realizar a programacao dos robos. Para comu-nicar o adaptador usb com os outros modulos, e utilizadoum cabo flat. O mesmo sera utilizado para a realizacao detransferencia de dados em forma serial entre o computadore a antena de radio. Atraves da temporada 2014 foi possıvelconcluir que a comunicacao entre o computador e os robosnao estava satisfatoria, ou seja, e necessario diminuir o tempode envio de dados para os robos, sendo aderida uma meta de10 mS entre o envio da palavra de comando ate sua execucao.
Fig. 11. Adaptador USB.
IV. VISAO COMPUTACIONAL
Algoritmo desenvolvido em C++ utilizando o softwareEclipse e as biblioteca OpenCV no ambiente Linux, quetem como o objetivo o monitoramento da posicao da bolae dos jogadores no campo, processando a posicao desseselementos em tempo real para que a tomada de decisao eo controle dos robos seja possıvel, [3]. O programa le asmatrizes da imagem adquirida pela camera, buscando umconjunto de pixels acima de certa intensidade. Ocorre entaoo agrupamento desses pixels em clusters (clusterizacao) queserao rotulados como time aliado, time adversario e boladurante o processo de calibracao, [4]. Essa calibracao e feitaatraves de interface grafica (GUI), o operador associa, atravesde cliques do mouse, os elementos (robos e bola) aos seusrespectivos clusters de cor. Todas as coordenadas das partesmoveis sao passadas ao controle durante a partida em temporeal, atraves do tracking dos clusters definidos na calibracao.
Na interface grafica tambem sao realizados os ajustes paraa deteccao das linhas do campo alem do contraste e saturacaoda imagem, como mostra a Figura 12. Alem disso, osconhecidos problemas de oclusao e variacao de iluminacaodurante a partida serao contornados com utilizacao do Filtrode Kalman, que garante certa estabilidade em instantes ondea captacao de imagem possa falhar, inferindo a posicao dosrobos e da bola em perıodos curtos de ruıdo ou oclusao, [1].Por fim, o sistema visa garantir o recebimento das coorde-nadas de posicao dos jogadores e da bola para o sistema decontrole da forma mais eficiente e precisa possıvel, de modoa garantir orientacao aos robos.
Fig. 12. Interface grafica do sistema de visao.
V. CONTROLE E ESTRATEGIA
Para o controle de um robo de duas rodas foi usado umaaproximacao tradicional, definida por parametros da posicaoe velocidade do robo. Os vetores de velocidade e posicaodados por U e P, respectivamente.
U = [v w]T , (1)
P = [x y θ ]T . (2)
Atraves do vetor posicao P e possıvel obter a velocidade nadirecao x e y, e de acordo com o angulo θ obter a velocidade

angular, com a derivada deste vetor em questao. A ideia foiobter este vetor posicao derivada atraves do vetor U, querelaciona a velocidade translacional v definido a partir docentro do robo e velocidade angular ω definido com respeitoao centro do robo, e a matriz J, que refere-se a matrizJacobiano.
P =
xyθ
= J(θ).U, (3)
J(θ) =
cosθ 0sinθ 0
0 1
, (4)
U = [v w]T =[ V L+V R
2V L−V R
L
]. (5)
A Figura 13 relaciona as velocidades de cada uma da rodasdo robo e o angulo no qual ele se encontra. O controladorobtem o erro da posicao e de angulacao do robo para definirqual acao deve ser tomada. A partir dai, a equacao para avelocidade das rodas do robo, pode ser definida tanto para aroda esquerda, quanto para direita como pode ser observadonas equacoes de VL e VR, respectivamente, relacionado coma velocidade angular ω e a distancia entre as duas rodas dorobo L.
ω = Kp.θe+Kd .θe, (6)
VR = v+(L2)ω, (7)
VL = v− (L2)ω. (8)
O ganho proporcional Kp e derivativo Kd para velocidadeangular do robo estao relacionado na equacao de ω , seguindoa lei de controle PD, usado para move-lo.
θe = θd −θ . (9)
A velocidade angular do robo esta relacionado ao θe,correspondente ao erro da posicao angular, equivalente adiferenca da posicao angular desejada θd e da qual estarano exato momento θ .
Fig. 13. Vetores posicao e velocidade
AGRADECIMENTOS
A Equipe de Futebol de Robos Red Dragons UFSCaragradece o apoio financeiro da Pro-Reitoria de Extensao daUFSCar e o apoio do Grupo de Robotica da UFSCar.
REFERENCES
[1] Carlos Henrique Farias dos Santos. Teoria e pratica do filtro de kalman.[2] Jong-Hwan Kim, Dong-Han Kim, Yong-Jae Kim, and Kiam-Tian Seow.
Soccer Robotics, volume 11 of Springer Tracts in Advanced Robotics.Springer, 2004.
[3] Maurıcio Marengoni and Denise Stringhini. Tutorial: Introducao a visaocomputacional usando opencv. 16:125–160, 2009.
[4] Eder A. Penharbel, Ricardo C. Destro, Flavio Tonidandel, and Rei-naldo A.C. Bianchi. Eder a. penharbel, ricardo c. destro, flaviotonidandel, reinaldo a.c. bianchi.