TEMA 4. DATOS PANEL. MODELOS ESTÁTICOS
33
PUBLICACIONES DE 4º CURSO Licenciatura: ECONOMICAS Asignatura: MODELOS REGIONALES TEMA 4: DATOS PANEL: MODELOS ESTÁTICOS Autores: Jesús Mur; Ana Angulo Departamento: ANÁLISIS ECONÓMICO Curso Académico: 2008/2009 Facultad de Ciencias Económicas y Empresariales Universidad de Zaragoza
-
Upload
jose-manuel-masanet-garcia -
Category
Documents
-
view
26 -
download
2
Transcript of TEMA 4. DATOS PANEL. MODELOS ESTÁTICOS

PUBLICACIONES DE 4º CURSO
Licenciatura: ECONOMICAS
Asignatura: MODELOS REGIONALES
TEMA 4:
DATOS PANEL: MODELOS ESTÁTICOS
Autores: Jesús Mur; Ana Angulo
Departamento: ANÁLISIS ECONÓMICO
Curso Académico: 2008/2009
Facultad de Ciencias Económicas y Empresariales
Universidad de Zaragoza

2
Indice
1- Introducción.
2- Fuentes de heterogeneidad en conjuntos de datos panel.
3- Estimación en modelos de datos panel estáticos.
4- Contrastes de especificación en modelos de datos panel estáticos.
5- Efectos espaciales en modelos de datos panel.

3
1. INTRODUCCIÓN
Se dice que estamos en presencia de un conjunto de datos de panel cuando se
dispone, simultáneamente, de información de corte transversal y de serie temporal. Esto es
cuando se dispone de observaciones sobre determinadas características de un conjunto de
agentes (individuos, países, empresas, etc.) a lo largo de un período continuado de tiempo.
La recogida de información se lleva a cabo, por tanto, en dos dimensiones y, de este modo,
se generan múltiples observaciones puntuales para cada unidad económica.
Generalmente, los paneles de datos se distinguen unos de otros según su
amplitud transversal y temporal. Así, los paneles con un número muy amplio de
observaciones transversales y un número de períodos reducido se denominan Paneles
Micro. En el caso contrario, número de periodos elevado e información transversal
reducida se conoce con el nombre de Paneles Macro. Por último, en el caso realmente
extraordinario de contar con un panel con amplia dimensión tanto temporal como
transversal hablaríamos de un Campo aleatorio (Random Field).
Así mismo, resulta habitual hablar de paneles de datos equilibrados o paneles
completos cuando el número de observaciones transversales es el mismo para cada
período temporal.
Comenzaremos presentando una breve descripción de las principales ventajas,
así como de las limitaciones, del uso de muestras de datos de panel en la investigación
económica en relación con las bases de datos que sólo contemplan una dimensión
temporal (series temporales) o individual (corte transversal). Para ello nos basaremos en
los trabajos de Hsiao (2000), Klevmarken (1989), Solon (1989) y Baltagi (2001). Entre
las principales ventajas hay que destacar las siguientes:
1) Los datos de panel proporcionan menos problemas de multicolinealidad
(presente en numerosas ocasiones al utilizar datos de series temporales), más grados de

4
libertad y, por tanto, mayor eficiencia. En efecto, la utilización de datos de panel, como ya
hemos comentado, permite utilizar un conjunto de datos más informativos, en el sentido de
que es capaz de recoger con mayor precisión la variabilidad en los datos, tanto la existente
entre individuos como la que existe a lo largo del tiempo.
2) Asimismo, la utilización de datos de panel permite identificar y medir algunos
efectos que no pueden considerarse al utilizar únicamente datos de corte transversal o datos
de series temporales. Ben-Porath (1973) sugiere un ejemplo. Supongamos que tenemos
datos de corte transversal correspondientes a un determinado número de mujeres en el que
una variable es la participación media anual en el mercado de trabajo. Supongamos que
una determinada mujer ha participado una media del 50%. Esta cifra ha podido ser
generada por dos situaciones diferentes. O bien ha trabajado el 50% de los años
considerados, o bien trabaja a tiempo parcial durante todos los años. Las implicaciones de
ambas situaciones son distintas y sólo la utilización de datos de panel permitiría
discriminar ambas situaciones.
3) A diferencia de los datos de corte transversal, una ventaja adicional de los datos
de panel radica en la posible modelización de efectos dinámicos. Por ejemplo, en los datos
de corte transversal podemos determinar qué porcentaje de la población consume un
determinado producto en un determinado momento. La utilización de datos de panel
permite analizar qué porcentaje de personas que consumían un producto siguen haciéndolo
y quienes han dejado de consumirlo. Un ejemplo de esto que acabamos de mencionar
referido al desempleo puede encontrarse en Ashenfelter (1978) y Ashenfelter y Solon
(1982).
4) Otra de las ventajas atribuidas a los datos de panel con respecto a los datos de
corte transversal es la gran capacidad que ofrecen al investigador de construir y
contrastar complicados modelos de comportamiento. De hecho, el análisis y la
modelización de la eficiencia técnica resulta más interesante realizarla utilizando datos
de panel (Baltagi y Griffin, 1988b; Cornwell y otros, 1990; y Kumbhakar, 1990, 1991,
1992, 1993). Además, es necesario introducir menos restricciones a la hora de estimar
modelos de retardos distribuidos usando datos de panel, en relación con los que son
necesarios cuando se utilizan datos de series temporales (Hsiao, 1986).

5
5) Por otra parte, los datos de panel permiten resolver o reducir la magnitud de
un problema econométrico muy importante que, a menudo aparece en los estudios
empíricos. Nos referimos a la presencia de variables omitidas (inobservadas u
observadas con error) que están correlacionadas con las variables explicativas del
modelo. Por ejemplo, consideremos el siguiente modelo de regresión:
itititit zxy ερβα +++= '' Ni ,...,1= ; Tt ,...,1= (1)
donde dada la naturaleza de los datos, utilizaremos dos tipos de subíndices: i para los
individuos1 ( Ni ,...,1= ) y t para el período temporal ( Tt ,...,1= ) y donde itx y itz son
vectores de variables exógenas, donde el término de error itε se distribuye de forma
idéntica e independiente sobre i y t con media cero y varianza 2εσ . En estas
circunstancias, es bien conocido que la estimación MCO proporciona estimadores
consistentes de los parámetros del modelo βα , y ρ. Sin embargo, si suponemos que las
variables incluidas en itz son inobservables, y que además la covarianza entre itx y itz
no es cero, (es decir, están correlacionadas con itx ), entonces los estimadores MCO
obtenidos al hacer la regresión de ity sobre itx serán sesgados2.
En estas circunstancia, se puede comprobar como la disponibilidad de datos de
panel permite solucionar el problema. Al disponer de observaciones repetidas para un
grupo de individuos podemos eliminar el efecto de las variables incluidas en z . Si por
ejemplo, iit zz = para todo t (los valores de z permanecen constantes a lo largo del
tiempo para un individuo, pero varían entre individuos), podemos tomar las primeras
diferencias de las observaciones individuales en el tiempo y obtener:
1 Utilizaremos el término individuos para referirnos a las unidades de corte transversal. Como se ha comentado con anterioridad, también puede tratarse de empresas, hogares, países, etc. 2 Siempre que se omiten variables relevantes se incurre en un problema de sesgadez de los parámetros incluidos salvo que las variables incluidas y las omitidas sean ortogonales.

6
( ) ( )1,'
1,1, −−− −+−=− tiittiittiit xxyy εεβ Ni ,...,1= ; Tt ,...,1= (2)
De forma análoga, si tit zz = para todo i (los valores de z permanecen constantes
entre individuos en un determinado momento del tiempo, pero presentan variación
temporal), podemos tomar desviaciones con respecto a la media entre individuos en un
periodo de tiempo y obtener:
⎟⎠⎞
⎜⎝⎛ −+⎟
⎠⎞
⎜⎝⎛ −=−
−−−
tittittit xxyy εεβ'
Ni ,...,1= ; Tt ,...,1= (3)
donde N
yy
N
iit
t
∑== 1 ,
N
xx
N
iit
t
∑== 1 y
N
N
iit
t
∑== 1
εε .
De esta forma, podemos obtener estimadores insesgados y consistentes para β,
en base a las regresiones (2) y (3). Sin embargo, si únicamente se hubiera dispuesto de
datos de corte transversal (T=1) para el primer caso ( iit zz = ), o datos de series
temporales (N=1) para el segundo ( tit zz = ), tales transformaciones no se podrían haber
llevado a cabo. En consecuencia, no se podrían obtener estimadores consistentes de β a
no ser que se contara con instrumentos que estuvieran correlacionados con z, pero
incorrelados con x y ε.
Existen numerosas aplicaciones que permiten ilustrar este punto. Utilicemos, por
ejemplo, el trabajo de Baltagi y Levin (1992) en el que se estima la demanda de tabaco
en Estados Unidos de 46 estados durante 25 años. Concretamente, se modeliza el
consumo como una función de la renta, los precios y el consumo retardado. Estas
variables varían entre estados y en el tiempo. Sin embargo, hay muchas otras variables
que pueden ser invariantes en el tiempo o entre estados y pueden afectar al consumo.
Ejemplos de las primeras (invariantes en el tiempo) serían la religión o la educación.
Entre las segundas podría citarse la publicidad sobre radio o televisión que,
normalmente, relaciona negativamente el consumo de tabaco con la salud. La

7
información referente a dichas variables es difícil de obtener y, en consecuencia, su
omisión conlleva problemas de sesgos en las estimaciones, a no ser que se explote la
naturaleza de los datos panel para eliminar sus efectos.
6) Finalmente, los datos de panel se recogen a nivel de micro-unidades como
individuos, empresas u hogares (familias), eliminándose los sesgos causados
principalmente por la agregación de individuos, empresas o productos (Blundell, 1988,
Klevmarken, 1989 y; Blundell y Meghir, 1990).
Entre las limitaciones de los datos de panel hay que destacar las siguientes:
i) Problemas asociados al diseño y recogida de la información. Kasprzyk y otros
(1989) ofrecen una extensa discusión sobre esta problemática. En cualquier caso, entre
estos problemas podemos citar la posible no representatividad de la muestra elegida, las
posibles no respuestas por falta de cooperación de los entrevistados, el que el
entrevistado no recuerde con exactitud su comportamiento, etc. (Bailar, 1989).
ii) Distorsiones debidas a errores de medida. Kalton y otros (1989) indican que
los errores de medida surgen a causa de respuestas falsas que, por su parte, son fruto de
respuestas ambiguas, errores de memoria, mentiras deliberadas de los encuestados
(sesgo de prestigio) o bien debidos a los sesgos que puede introducir el propio
encuestador.
iii) Una tercera limitación hace referencia a los posibles problemas de selección.
En ocasiones, es el propio investigador el que establece una especie de autoselección,
por ejemplo cuando sólo estamos interesados en aquellos que consumen por encima de
un determinado nivel, con lo que artificialmente estamos truncando la muestra con los
consiguientes problemas que eso puede traer consigo (Hausman y Wise, 1979). Otro
problema asociado con la selección hace referencia a la posible no respuesta debido a
que el encuestado rechaza participar o no está en casa, etc, aunque esto sólo ocurre en la
etapa inicial de la recogida de datos. Finalmente, destacamos el problema de lo que se

8
denomina “atrición” que, en cierto modo, también se puede catalogar como no respuesta
pero una vez que el panel está en funcionamiento. De las personas que originalmente
participan algunos pueden renunciar voluntariamente o bien se desplazan del lugar, o
bien mueren. En estas ocasiones, suelen sustituirse por personas de similares
características. Björklund (1989) y Ridder (1990, 1992) proporcionan una descripción
detallada de las consecuencias de la atrición.
iv) Finalmente, la última limitación hace referencia a que en la mayoría de los
casos la dimensión temporal del panel es generalmente reducida. Ello hace que la mayor
parte de los argumentos asintóticos utilizados en los procedimientos de estimación e
inferencia recaigan casi exclusivamente en el número de individuos encuestados. En la
mayor parte de los casos, la reducida dimensión temporal de los paneles tienen mucho
que ver con el coste de obtención de los datos. Además, incrementar la dimensión
temporal puede aumentar también los problemas de atrición que acabamos de
mencionar.
Un concepto importante en el contexto de datos de panel es lo que se denomina
heterogeneidad y, asociada a ella, sesgo de heterogeneidad. Como en todo tipo de
modelizaciones, un modelo de datos de panel pretende explicar una variable a través de
las variables más importantes, excluyendo ciertas variables cuyo impacto es menos
significativo o peculiar de ciertos individuos. En estas circunstancias, la suposición
típica de que una variable económica y es generada por una función de distribución
probabilística P(y|θ), donde θ es un vector real idéntico para todos los individuos y
períodos puede no ser realista. Es decir, el ignorar efectos específicos de individuos y
tiempo que existen entre las unidades de tiempo o del corte transversal, y que no se
capturan con las variables incluidas en el modelo, puede conducirnos a la presencia de
heterogeneidad de los parámetros del modelo especificado. Es decir, la estimación del
modelo general, sobre la base del total de las NT observaciones:
ititit xy εβα ++= ' Ni ,...,1= ; Tt ,...,1= (4)
puede conducir a importantes sesgos de heterogeneidad si, por el contrario, es
conveniente diferenciar los parámetros en el tiempo o entre individuos.

9
En general, se pueden distinguir las siguientes formulaciones:
1) Los coeficientes de las pendientes son constantes, pero el término
independiente varía entre individuos:
ititiit xy εβα ++= ' Ni ,...,1= ; Tt ,...,1= (5)
Esta formulación dará lugar a los modelos de componentes de error en una
dirección.
2) Los coeficientes de las pendientes son constantes, pero el término
independiente varía entre individuos y tiempo:
itititit xy εβα ++= ' Ni ,...,1= ; Tt ,...,1= (6)
Esta formulación dará lugar a los modelos de componentes de error en dos
direcciones.
3) Todos los coeficientes varían entre individuos:
itiitiit xy εβα ++= ' Ni ,...,1= ; Tt ,...,1= (7)
4) Todos los coeficientes varían entre individuos y tiempo:
ititititit xy εβα ++= ' Ni ,...,1= ; Tt ,...,1= (8)
En todos los casos, se asume que el término de perturbación itε cumple las
hipótesis básicas; es decir, se supone distribuido de forma idéntica e independiente
sobre individuos y sobre el tiempo, con media 0 y varianza 2εσ .
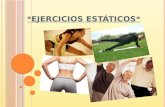
Ilustremos con los siguientes gráficos los posibles sesgos al estimar el modelo
(4) (con parámetros homogéneos), cuando lo correcto habría sido especificar, por

10
ejemplo, el modelo (5) (pendientes constantes y diferentes términos independientes),
suponiendo que consideramos una única variable explicativa:
Donde cada elipse representa la nube de puntos para un individuo en el tiempo y,
la línea recta que la atraviesa representan la regresión individual. Por otro lado, la línea
más gruesa representa la línea de regresión correspondiente al modelo (4).
Sin embargo entre los modelos 5-8, son los dos primeros los que generalmente
son utilizados en el marco de datos de panel. Es decir, lo habitual es incorporar
heterogeneidad a través del término independiente. En consecuencia, el efecto de un
cambio en las variables explicativas es el mismo para todos los individuos y períodos,
x
y
x
y
x
y

11
pero el nivel medio puede variar entre individuos (en 5) o entre individuos y tiempo (en
6).
Como ya se ha indicado, el supuesto básico de estos modelos radica en el hecho
de que el efecto de todas las variables omitidas se recoge a través de tres tipos de
variables:
1. Variables idénticas a lo largo del tiempo para cada individuo, pero que
varían entre individuos. Por ejemplo, los atributos de la dirección de una
empresa, la habilidad, el sexo así como muchas otras variables
sociodemográficas.
2. Variables idénticas para todos los individuos en un período de tiempo, pero
que varían en el tiempo. Dentro de ellas, se podrían considerar variables tales
como los precios, el tipo de interés o el ambiente de pesimismo u optimismo
de una economía en un momento del tiempo.
3. Variables que varían tanto entre individuos como en el tiempo. Algunos
ejemplos podrían ser los beneficios de una empresa, las ventas o el stock de
capital.
Las cuales se pueden ver reflejadas a través del término independiente variable
del modelo especificado.
Concluiremos esta sección mostrando la especificación propuesta por Hoch
(1962) para estimar una función de producción con datos de panel. Se parte de la típica
función de producción de tipo Cobb-Douglas: itkitkitit vxxy ++++= ββμ ...11 , donde y
es el logaritmo del output y x1, ...,xk son los logaritmos de los inputs. A continuación, se
trata de solventar la crítica habitual relativa al hecho de haber ignorado variables que
reflejan diferencias en las estrategias de dirección de las empresas, diferencias en
tecnología, etc., así como otro tipo de variables que afectan a la productividad de todas

12
las empresas pero que fluctúan en el tiempo. En consecuencia, se deberían introducir
dichas variables que podemos denotar, respectivamente, como Mi y Pt en el modelo (9),
obteniendo:
ittikitkitit PMxxy ελαββμ ++++++= ...11 (9)
Sin embargo, dado que las variables definidas como Mi y Pt son habitualmente
no observadas, su efecto se traduce en un término independiente que varía entre
empresas y/o tiempo tal y como se definió en las ecuaciones (5) y (6). De esta forma, se
demuestra en el trabajo mencionado que teniendo en cuenta la heterogeneidad entre
empresas y periodos se mejora la especificación del modelo, dado que se reduce o se
evita el sesgo por omisión de variables relevantes.
Por último, cabe mencionar que los efectos específicos de los individuos y/o del
tiempo recogidos en iα o itα en las ecuaciones (5) y (6), pueden tratarse como fijos o
como aleatorios, dando lugar a dos tipos diferentes de modelos:
• Si se les trata como parámetros desconocidos fijos, se obtiene el modelo de
efectos fijos.
• Si por el contrario, asumimos que, aunque tales términos independientes
difieren entre individuos y/o tiempo, puede considerarse que proceden de una
distribución de media μ y varianza 2ασ , se obtiene el modelo de efectos
aleatorios, donde los efectos individuales iα o itα son tratados como
aleatorios.
El enfoque de efectos fijos está condicionado a los valores de iα o itα ; es
decir, la distribución de la variable endógena se condiciona al valor de dichos
parámetros, los cuales pueden estimarse. Por el contrario, el enfoque de efectos
aleatorios no está condicionado a los valores individuales iα o itα sino que los integra.
En términos formales:

13
Efectos fijos: { } iitiitit xxyE αβα += ' o { } ititititit xxyE αβα += ' (10)
Efectos aleatorios: { } β'ititit xxyE =
Por este motivo los modelos de efectos fijos se obtienen en base al enfoque
condicional del modelo, mientras que los modelos de efectos aleatorios en base al
enfoque incondicional. Además, como ya se ha mencionado para ambos modelos (de
efectos fijos y aleatorios) se habla de modelos de componentes del error en una
dirección (one-way) cuando se incorpora el término iα (ecuación 5, solo variación entre
individuos), mientras que se habla de modelos de componentes del error en dos
direcciones (two-way) cuando se incorpora el término itα (ecuación 6, variación entre
individuos y tiempo). A continuación, procederemos a su definición.
2. ENFOQUE CONDICIONAL: EL ESTIMADOR INTRAGRUPO
El modelo de efectos fijos es simplemente un modelo de regresión lineal cuyos
términos independientes varían entre individuos y/o tiempo. Consideraremos en primer
lugar, el modelo (5) que incorpora, únicamente, la variación entre individuos, y que
recibe el nombre de modelo de componente del error en una dirección, dedicando un
segundo epígrafe más breve al modelo (6) o modelo de componente del error en dos
direcciones.
2.2 MODELO DE COMPONENTE DEL ERROR EN UNA DIRECCIÓN
Como ya se ha indicado, este modelo de efectos fijos es un modelo de regresión
lineal cuyos términos independientes varían entre individuos:
ititiit xy εβα ++= ' ( )2,0~ εσε IIDit (11)

14
donde itx es un vector de variables explicativas de dimensión K (es decir, recoge la
observación it de las K variables explicativas consideradas), que se asumen
independientes de itε ; y donde iα recoge el efecto de aquellas variables propias del
individuo i que permanecen constantes en el tiempo y, que muy probablemente se
encuentran correlacionadas con las variables incluidas en itx .
En notación matricial:
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
+
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
+
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
++
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
+
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
NN
N
T
T
T
N x
xx
y
yy
ε
εε
βα
ι
αι
α
ι
..
..
..00
...
0.
.
0
0..0
..
2
1
2
1
21
2
1
(12)
siendo:
( )1
.
.
.1
xTy
y
y
iT
i
i
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
=; ( )
)1(1,...,1,1'
xTT =ι
( )KxTxxx
xxxxxx
x
xx
x
KiTiTiT
Kiii
Kiii
iT
i
i
i
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
......
...
...
.
.
.
21
22221
11211
'
'2
'1
;
( )1
.
.
.2
1
KxK ⎥
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
β
ββ
β

15
( ))1(
...,, ,,21'
xTiTiii εεεε =
con [ ] 0=iE ε , [ ] Tii IE 2'εσεε = y [ ] 0' =jiE εε si ji ≠
siendo TI la matriz identidad de orden T (T x T).
Es decir, cada ecuación i-ésima, es de la forma:
iiiTi xy εβαι ++= i=1,...,N
Esto puede escribirse en el marco del modelo de regresión tradicional mediante
la inclusión de una variable ficticia para cada unidad i en el modelo:
itit
N
jijjit xdy εβα ++= ∑
=
'
1 (13)
donde ijd = 1 si ji = y 0, en otro caso. Es decir, se incluyen N variables ficticias en el
modelo, tantas como individuos. Los parámetros Nαα ,...,1 y β pueden estimarse por
mínimos cuadrados ordinarios, a partir de (13). A los estimadores β así obtenidos se
les denomina estimador de variable ficticia de mínimos cuadrados.
Sin embargo, dado que normalmente N (la dimensión transversal) es elevada, la
regresión resultante (13) está constituida por un número muy elevado de regresores, lo
cual resulta poco atractivo. No obstante, afortunadamente los estimadores contenidos en
β pueden obtenerse de forma más sencilla, efectuando una regresión sobre las variables
obtenidas como desviaciones respecto a las medias individuales. Básicamente, esto
equivale a una transformación de los datos que implica la eliminación de los efectos
individuales iα . Para analizar este punto, a partir de las medias temporales de cada
variable se define el modelo:
iiii xy εβα ++= ' (14)

16
donde T
yy
T
tit
i
∑== 1 ,
T
xx
T
tit
i
∑== 1 y
T
T
tit
i
∑== 1
εε .
Restando miembro a miembro las expresiones (5) y (14), se obtiene:
( ) ( )iitiitiit xxyy εεβ −+−=− ' (15)
A este modelo se le denomina trasformación intragrupos. A los estimadores
MCO para β , obtenidos a partir de este modelo transformado en desviaciones con
respecto a las medias individuales se les denomina estimadores intragrupos o
estimadores de efectos fijos (Fixed effect estimators, FE) y, como ya hemos comentado
son idénticos a los obtenidos a partir del estimador de variables ficticias mínimo
cuadrático. Estos estimadores, por tanto, se calculan a partir de la siguiente expresión:
( )( ) ( )( )∑∑∑∑= =
−
= =
−−⎟⎠
⎞⎜⎝
⎛−−=
N
i
T
tiitiit
N
i
T
tiitiitFE yyxxxxxx
1 1
1
1 1
'^β (16)
El procedimiento anterior es equivalente a premultiplicar la ecuación i-ésima:
iiiTi xy εβαι ++= (17)
por una matriz Q de orden (T x T), simétrica e idempotente: '1TTT T
IQ ιι−= :
iiiiiTi QxQQxQQyQ εβεβαι +=++= (18)
matriz, que aplicada a cualquier vector, lo transforma en desviaciones con respecto a su
media (y, aplicado a una matriz, transforma sus columnas en desviaciones con respecto
a su media). De esta forma, se elimina el término iα constante en el tiempo,
eliminándose, de esta forma el problema relativo a su probable correlación con las
variables incluidas en itx . Por ejemplo:

17
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
−
−
=
iiT
ii
i
yy
yy
yQ...
1
y de forma análoga para ixQ y iQε .
Haciendo uso de la nomenclatura anterior, el estimador de efectos fijos que se
obtiene al aplicar MCO al modelo transformado es igual a:
∑∑=
−
=⎟⎟⎠
⎞⎜⎜⎝
⎛=
N
iii
N
iiiFE yQxxQx
1
'1
1
'^β (18)
Expresión equivalente a la recogida en (16)3.
En consecuencia, a partir de lo indicado, puede comprobarse como el modelo de
efectos fijos se concentra en las diferencias existentes “dentro” de los individuos. Es
decir, se explica hasta qué punto ity se diferencia de la media temporal de esa variable,
iy y, por tanto, no explica porque iy es diferente de jy .
Si se asume que todas las variables contenidas en itx son independientes de
todos los términos itε , los estimadores de efectos fijos son estimadores insesgados de
β . Si además se impone normalidad para los términos de perturbación itε , los
estimadores de efectos fijos, EF
^β , también siguen una distribución normal, por lo que
puede utilizarse los procedimientos de inferencia habituales. Para consistencia se
requiere:
( ){ } 0=− itiit xxE ε (19)
3 Este tipo de estimador es también equivalente al que se obtiene al transformar el modelo en primeras diferencias y después aplicar MCG para corregir el esquema de correlación tipo MA generado en dicha transformación.

18
La condición suficiente para que lo anterior sea cierto es que itx sea
estrictamente exógena, lo cual equivale a que:
{ } 0=isitxE ε para ts,∀ (20)
es decir, que las variables explicativas no dependan ni de valores presentes, ni pasados
ni futuros del término de error.
Esta condición puede resultar muy restrictiva en algunas aplicaciones. Por
ejemplo, excluye la inclusión, como explicativa, de la variable endógena retardada así
como la inclusión de cualquier variable que dependa de la historia de la propia variable
endógena. Un ejemplo de esto último sería el caso de si para explicar la oferta laboral de
un individuo se desea incluir en el modelo los años de experiencia, los cuales dependen
de la propia historia laboral del individuo.
Además, en estas mismas circunstancias (variables explicativas estrictamente
exógenas), los N términos independientes se estiman de forma insesgada como:
FEiii xy^
'^
βα −= Ni ,...,1= (21)
si bien, tales estimadores sólo son consistentes cuando ∞→T .
La matriz de varianzas y covarianzas para los estimadores de efectos fijos FE
^β ,
suponiendo que itε se define de forma idéntica e independiente entre individuos y
tiempo, con varianza 2εσ (es decir, hay homocedasticidad y no autocorrelación), viene
dada por:
( )( )1
1
'21
1 1
'2^
−
=
−
= =⎟⎟⎠
⎞⎜⎜⎝
⎛=⎟
⎠
⎞⎜⎝
⎛−−=
⎭⎬⎫
⎩⎨⎧ ∑∑∑
N
iii
N
i
T
tiitiitFE xQxxxxxV εε σσβ (22)

19
Una estimación consistente de 2εσ se obtiene a partir de la suma de los
cuadrados de los residuos intragrupos dividido entre ( ) KTN −−1 , es decir:
( )
( ) ( ) ( )∑∑
∑∑
= =
= =
⎟⎠⎞
⎜⎝⎛ −−−
−−=
=⎟⎠⎞
⎜⎝⎛ −−
−−=
N
i
T
tFEiitiit
N
i
T
tFEitiit
xxyyKTN
xyKTN
1 1
2^'
1 1
2^'
^2^
11
11
β
βασ ε
(23)
Por último, se debe hacer notar que una formulación alternativa a (11) consiste
en introducir un término independiente medio μ :
ititiit xy εβαμ +++= ' (24)
donde ahora μ y iα son constantes fijas, las cuales no son separadamente identificables
a no ser que se introduzcan restricciones adicionales. Lo habitual es introducir la
restricción 01
=∑=
N
iiα . Entonces el efecto individual iα representa la desviación del
individuo i de la media común μ . El estimador del parámetro β es idéntico al ya
conocido. Los estimadores de μ y iα son, respectivamente:
FExy^
'^
βμ −= ; FEiii xy^
'^^
βμα −−= (25)
donde NT
yy
N
i
T
tit∑∑
= == 1 1 y NT
xx
N
i
T
tit∑∑
= == 1 1
2.2 MODELO DE COMPONENTE DEL ERROR EN DOS DIRECCIONES

20
Como ya se ha indicado, este modelo de efectos fijos es un modelo de regresión
lineal cuyos términos independientes varían entre individuos y tiempo:
itittiitititit xxy εβλαεβα +++=++= '' (26)
En este caso, para obtener los estimadores de efectos fijos, se debe llevar a cabo
una transformación diferente de tal forma que desaparezcan tanto los efectos
individuales iα como los temporales tλ . En este caso, los estimadores resultantes son
los que resultan de aplicar MCO a la siguiente ecuación de variables transformadas:
( ) ( ) ( )εεεεβ +−−++−−=+−− tiittiittiit xxxxyyyy ' (27)
donde, como ya se ha definido con anterioridad:
T
yy
T
tit
i
∑== 1 es la media temporal;
NT
yy
N
i
T
tit∑∑
= == 1 1 es la media total;
y N
yy
N
iit
t
∑== 1 es la media por individuos.
Y ahora los estimadores de los efectos iα y tλ vienen dados por:
( ) ( ) EFiii xxyy^'^βα −−−= (28)
( ) ( ) EFttt xxyy^'^βλ −−−=

21
No obstante, para especificar este tipo de modelo se requiere que tanto T como N
sea elevado. En consecuencia, dado que en la mayor parte se trabaja con micropaneles
(N elevado, pero T pequeño) este modelo es escasamente utilizado. En estos casos, lo
que se suele hacer es incorporar al modelo las correspondientes dummies temporales.
3. ENFOQUE INCONDICIONAL: EL ESTIMADOR GLS
Al igual que en el caso del modelo de efectos fijos consideraremos en primer
lugar, el modelo que incorpora, únicamente, la variación entre individuos (modelo de
componente del error en una dirección), dedicando un segundo epígrafe más breve al
modelo de componente del error en dos direcciones.
3.1 MODELO DE COMPONENTE DEL ERROR EN UNA DIRECCIÓN
Tal y como se ha comentado con anterioridad, en el modelo de efectos aleatorios
los efectos individuales iα son tratados como aleatorios y, además se distribuyen de
forma idéntica e independiente entre individuos, es decir:
itiitit xy εαβμ +++= ' , ( )2,0~ εσε IIDit ; ( )2,0~ ασα IIDi (29)
donde μ denota al término independiente; iti εα + es tratado como un término de error
compuesto de dos componentes: un componente específico individual (invariante en el
tiempo) y otro componente que varía entre individuos y en el tiempo y, que se supone
incorrelado temporalmente. Además, se asume que iα y itε son independientes entre sí
e independientes de jsx , para todo j y s .
Ó en términos matriciales: iiiiTiTi vxxy +=+++= +δεαιβμι (29’)
siendo ( ) ( ) ( ) itiitiTiiiTi vvvvxx εαβμδι +====+ y;,...;,;, 1'''

22
En consecuencia, teniendo en cuenta los anteriores supuestos, los estimadores
MCO de los parámetros μ y β (δ ) en la ecuación (29’):
∑∑=
+
−
=
++
⎟⎟⎠
⎞⎜⎜⎝
⎛=
N
iii
N
iii yxxx
1
'
1
1
'^δ (30)
son insesgados y consistentes.
Sin embargo, la estructura de componentes del error implica que el término de
error iti εα + , presenta una forma particular de autocorrelación (a menos que 02 =ασ ).
En efecto, la matriz de varianzas y covarianzas del término de error para el individuo i,
iiTiv εαι += , es igual a:
( )
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
+
++
=+=Ω=
2222
2222
2222
'22'
......
...
εααα
αεαα
ααεα
αε
σσσσ
σσσσσσσσ
ιισσ TTTii IvvE (31)
NOTA
Una forma muy cómoda de expresar la matriz anterior Ω es la siguiente:
( )T
TT
I
TTTTII
TTTTT
TTTTTTTTTT
'22
'2
'2
'2
'22'22
ιισσιισ
ιισιισιισσιισσ
εαε
εεαεαε
++⎟⎟⎠
⎞⎜⎜⎝
⎛−=
=−++=+=Ω
ya que dadas las propiedades de TT
I TTTTT
''
y ιιιι⎟⎟⎠
⎞⎜⎜⎝
⎛− se cumple que la potencia r de
dicha matriz es igual a:

23
En consecuencia, las desviaciones típicas estimadas por los procedimientos
habituales aplicado para MCO son incorrectas y, se debe de recurrir a estimadores
mínimo cuadráticos generalizados (Generalized Least Square, GLS) para obtener
estimadores más eficientes.
Como en casos análogos, se utiliza la inversa de la matriz Ω para derivar el
estimador GLS de los parámetros de la ecuación (29’):
∑∑=
−+
−
=
+−+ Ω⎟⎟⎠
⎞⎜⎜⎝
⎛Ω=
N
iii
N
iiiGLS yxxx
1
1'
1
1
1'^δ (32)
siendo:
⎥⎦⎤
⎢⎣⎡ +=⎥
⎦
⎤⎢⎣
⎡+⎟
⎠⎞
⎜⎝⎛ −=
=⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛+
−−=
=+
+⎟⎟⎠
⎞⎜⎜⎝
⎛−=Ω−
'2
''2
'
22
2
2
'
22
'
21
11111
11
11
TTTTTTT
TTT
TTTTT
TQ
TTI
TTI
TTTI
ιιψσ
ιιψιισ
ιισσ
σσ
ιισσ
ιισ
εε
αε
ε
ε
εαε
con 22
2
αε
ε
σσσψ
T+=
Por último, teniendo en cuenta que Q transforma los datos en desviaciones con
respecto a las medias individuales y que '1TTT
ιι toma medias individuales, el estimador
GLS para los parámetros del modelo pueden escribirse como (ver Hsiao, 2003):
( )( )
( )( ) ⎟⎠
⎞⎜⎝
⎛−−+
⎟⎠
⎞⎜⎝
⎛−−+=
∑∑
∑∑
==
−
==
N
iiii
N
ii
N
iiii
N
iiGLS
yyxxTyQx
xxxxTxQx
1
'
1
'
1
1
'
1
'^
. ψ
ψβ (33)

24
xy GLSGLS
'^^βμ −=
A partir de la expresión anterior, se puede comprobar fácilmente como si 0=ψ
se obtiene el estimador de efectos fijos. Además, dado que 0→ψ si ∞→T , los
estimadores de efectos fijos y aleatorios son equivalentes para valores elevados de T .
Por otra parte, si 1=ψ , el estimador GLS es simplemente el estimador MCO (y Ω es
diagonal).
Por último, destacar que a partir de la especificación anterior, puede derivarse la
siguiente expresión:
( ) FEKBGLS I^^^βββ Δ−+Δ= (34)
donde ( )( ) ( )( )∑∑=
−
=
−−⎟⎠
⎞⎜⎝
⎛−−=
N
iii
N
iiiB yyxxxxxx
1
1
1
'^β es el estimador entre grupos
(between estimator) de β . En otras palabras, este último estimador es el estimador
MCO en un modelo de medias individuales:
iiii xy εαβμ +++= ' Ni ,...,2,1= (35)
y donde Δ es una matriz de ponderaciones, la cual es proporcional a la inversa de la
matriz de covarianzas de B
^β (ver Hsiao, 2003).
En otros términos, puede observarse como el estimador GLS se obtiene como
una media ponderada entre los estimadores “entre” y “dentro” de los grupos (between y
within group estimadores).
El estimador between ignora cualquier información existente dentro de los
individuos. Por tanto, el estimador GLS, bajos las suposiciones existentes, es la

25
combinación óptima entre los dos estimadores y, por tanto, es más eficiente que
cualquiera de ellos4. Concretamente, si las variables explicativas incluidas en (29) son
independientes de todos los términos itε y iα , el estimador GLS es insesgado. Es un
estimador consistente si además de (19), también se cumple que:
{ } 0=itixE ε y { } 0=iixE α (36)
(Observar que las condiciones anteriores son también el requisito para que sea
consistente el estimador between).
Una forma sencilla de calcular el estimador GLS consiste en estimar por MCO el
siguiente modelo transformado5:
itiitiit uxxyy +⎥⎦⎤
⎢⎣⎡ ⎟
⎠⎞⎜
⎝⎛ −−+⎥⎦
⎤⎢⎣⎡
⎟⎠⎞⎜
⎝⎛ ⎟
⎠⎞⎜
⎝⎛ −−=⎥⎦
⎤⎢⎣⎡ ⎟
⎠⎞⎜
⎝⎛ −− βψψμψ
'2
12
12
11111 (37)
donde uit es un término de perturbación aleatorio que carece de autocorrelación. De
nuevo, observar que si 0=ψ , se obtiene el estimador entre grupos o estimador within y
si 1=ψ , el estimador MCO.
Finalmente, indicar que como es habitual los componentes de la varianza 2ασ y
2εσ son desconocidos en la práctica. En consecuencia, tras estimar dichos términos en
una primera etapa, se derivan, en una segunda etapa, los estimadores GLS factibles. El
estimador de 2εσ se obtiene fácilmente a partir de los residuos de la regresión dentro de
grupos (within), tal y como se muestra en la expresión (23). Por último, un estimador
4 El estimador MCO (obtenido con 1=ψ ) es también una combinación lineal de los dos estimadores, pero no la eficiente.
5 Lógicamente, a este modelo se llega obteniendo la matriz R, tal que RR '2
1 1
εσ=Ω− , la cual es igual a
⎟⎠⎞
⎜⎝⎛
⎟⎠⎞⎜
⎝⎛ −−=Ω
− '21
21 11 TTT T
I ιιψσ ε , y premultiplicando el modelo original (29’) por dicha matriz.

26
consistente de 2ασ se obtiene teniendo en cuenta que la varianza del error de la regresión
entre grupos (between) es igual a 22 1εα σσ
T+ , la cual puede estimarse consistentemente
como:
( ) ∑=
⎟⎠⎞
⎜⎝⎛ −−
+−=
N
iBiBiB xy
KN 1
2^'^2^
11 βμσ (38)
donde B
^μ es el estimador between para μ . En consecuencia:
2^2^2^ 1εα σσσ
TB −= (39)
Al estimador GLS Factible (mínimo cuadrático generalizado factible) se le
conoce como estimadores de efectos aleatorios (random effects estimator) para β y μ
y, se denota como RE
^β .
Bajo ciertas condiciones de regularidad débil, el estimador de efectos aleatorios
es asintóticamente normal y, su matriz de varianzas y covarianzas viene dada por la
siguiente expresión:
( )( )1
1
'
1
'2^
−
==
⎟⎠
⎞⎜⎝
⎛−−+=
⎭⎬⎫
⎩⎨⎧ ∑∑
N
iiii
N
iiRE xxxxTxQxV ψσβ ε (40)
que muestra como el estimador de efectos aleatorios es más eficiente que el de efectos
fijos si se cumple que 0>ψ . La ganancia en eficiencia es debida a la utilización de la
variación entre grupos ( )xxi − .
En resumen, hasta el momento presente, hemos presentado una serie de
estimadores del vector de parámetros β . Los básicos son dos: el estimador entre
grupos (o between) y el estimador de efectos fijos (o within). Los otros dos estimadores
son el estimador MCO y el de efectos aleatorios. Ambos explotan las dos dimensiones

27
de los datos (between y within), pero mientras que el primero lo hace de forma
ineficiente, el segundo lo realiza de forma eficiente.
3.2 MODELO DE COMPONENTE DEL ERROR EN DOS DIRECCIONES
De forma análoga a lo comentado para el caso del modelo de efectos fijos, en
este caso se trata de incorporar los efectos temporales tλ , pero también con la
característica de ser considerados de naturaleza aleatoria, distribuidos de forma idéntica
e independiente:
ittiititititit xxy ελαβμεαβμ ++++=+++= ''
(41)
( )2,0~ ασα IIDi ; ( )2,0~ λσλ IIDt ; ( )2,0~ εσε IIDit
Además, igualmente se asume que iα , tλ y itε son independientes entre sí e
independientes de jsx , para todo j y s .
A partir de aquí puede seguirse un proceso análogo al anterior, aunque más
complejo. (Vease Baltagi, 2001, por ejemplo). En cualquier caso, la estrategia más
sencilla es aplicar MCO al modelo original transformado mediante la premultiplicación
de las distintas variables por la correspondiente matriz R. Dicha transformación es la
siguiente (lo ilustro para la variable dependiente, sería análogo para el resto):
( )yyyyy tiitit 321* θθθ +−−= (42)
siendo 221 1εα
ε
σσσθ
+−=
T;
222 1ελ
ε
σσσθ
+−=
N
1222213 −
++++=
ελα
ε
σσσσθθθNT

28
Sin embargo, como ya se comentó con anterioridad, para especificar este tipo de
modelo se requiere que tanto T como N sea elevado. En consecuencia, dado que en la
mayor parte se trabaja con micropaneles (N elevado, pero T pequeño) este modelo es
escasamente utilizado. Como se comentó con anterioridad, lo que se suele hacer es
incorporar al modelo las correspondientes dummies temporales.
4. ANÁLISIS DE ESPECIFICACIÓN
Tanto el modelo de efectos fijos como el de efectos aleatorios asumen que itε es
incorrelado entre individuos y en el tiempo (no autocorrelación). Sin embargo, como en
el caso de los modelos de regresión conocidos, si tal supuesto no se cumple, aunque los
estimadores estándares siguen siendo consistentes, se invalida la inferencia realizada a
partir de los tradicionales contrastes. Además, los estimadores dejan de ser eficientes.
Además, de forma extensiva, la presencia de heteroscedasticidad en itε (o, para los
modelos de efectos aleatorios en iα ) tiene efectos análogos. Como consecuencia de las
implicaciones señaladas es importante asegurarse de que nuestro modelo no presenta
ninguno de los dos problemas indicados, es decir, ni problema de autocorrelación ni de
heteroscedasticidad.
4.1 MODELO DE EFECTOS FIJOS
En el caso del modelo de efectos fijos, los contrastes son sencillos, dado que es
básicamente un modelo estimado por MCO. Un contraste bastante simple de
autocorrelación en el modelo de efectos fijos está basado en el contraste de Durbin-
Watson (DW). En consecuencia, se contrasta la hipótesis nula de no autocorrelación

29
frente a hipótesis alternativa que el término de perturbación para cada individuo sigue
un esquema AR(1), es decir:
ittiit υρεε += −1, (43)
donde itυ se encuentra idéntica e independientemente distribuido entre individuos y
tiempo.
En consecuencia, se contrasta autocorrelación en el tiempo con la restricción de
que todos los individuos tienen el mismo coeficiente de autocorrelación ρ .
Lógicamente, la hipótesis nula se plantea como 0:0 =ρH , frente a la alternativa de una
cola 0<ρ o 0>ρ .
La generalización del estadístico de Durbin-Watson al caso que nos ocupa fue
propuesta por Bhargava, Franzini y Narendranathan (1982) y, sigue la siguiente
expresión:
∑∑
∑∑
= =
= =
− ⎟⎠⎞
⎜⎝⎛ −
= N
i
T
tit
N
i
T
ttiit
pdw
1 1
2^
1 2
2
1,
^^
ε
εε (44)
donde it
^ε son los residuos de la regresión within.
En este caso, los anteriores autores también derivaron los puntos críticos que,
lógicamente, ahora dependen de los valores de N , T y K . Además, al contrario que en
el caso de series temporales, las zonas de indeterminación para el estadístico de DW
para datos de panel son muy pequeñas, particularmente cuando el número de individuos
en el panel es elevado.

30
De forma análoga, para contrastar heteroscedasticidad en el término de
perturbación itε , se puede utilizar también la serie de residuos de efectos fijos it
^ε para
calcular el contraste de tipo de multiplicadores de Lagrange desarrollado por Breusch-
Pagan. Lógicamente, se contrasta la hipótesis nula de homocedasticidad frente a la
alternativa de que
{ } ( )ασε '2itit zhV = (45)
donde h es una función continuamente diferenciable, desconocida y, que al evaluarla en
0 se obtiene la unidad, ( ) 10 =h . Este último requisito permite que la hipótesis nula se
plantee como 0:0 =αH .
El estadístico de prueba se construye a partir de los resultados de la estimación
de una regresión auxiliar que regresa el cuadrado de los residuos de la estimación de
efectos fijos (o residuos within), 2^
itε , sobre una constante y sobre las J variables itz
que consideramos que pueden estar generando el problema de heteroscedasticidad. Bajo
la hipótesis nula, el estadístico de Breusch-Pagan se calcula como ( )1−TN veces el 2R
de la anterior regresión auxiliar y, se distribuye asintóticamente como una distribución 2χ con J grados de libertad.
No obstante, para este tipo de modelos (modelos de efectos fijos), una estrategia
muy utilizada consiste en utilizar la propuesta de Arellano (1987) consistente en utilizar
la corrección de White que permite obtener una estimación de la matriz de varianzas y
covarianzas asintótica de los estimadores within-groups robusta tanto ante problemas de
heteroscedasticidad y correlación serial de cualquier tipo, para valores fijos de T y N
grande (caso más habitual) que viene dada por la siguiente expresión:
1
1
'
1
^'
^'
1
1
'^^
−
==
−
=⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧ ∑∑∑
N
iii
N
iiiii
N
iiiEF xQxxQQxxQxV εεβ (43)

31
donde FEiii xQyQ^^βε −= son los residuos del modelo within estimado.
No obstante, si uno desea realizar supuestos acerca de ciertas formas de
heterocedasticidad o autocorrelación, es posible derivar estimadores más eficientes
explotando la estructura de covarianzas del error a través del estimador MCGF,
exactamente igual que en los modelos conocidos.
4.2 MODELO DE EFECTOS ALEATORIOS
La mayoría de los contrastes que permiten contrastar los supuestos de
homocedasticidad y no autocorrelación en el marco de modelos de efectos aleatorios
son complicados de realizar. No obstante, como el estimador de efectos fijos es
consistente incluso cuando realizamos el supuesto de que iα se encuentra idéntica e
independientemente distribuido y es independiente de las variables explicativas, los
contrastes para el modelo de efectos fijos pueden ser también utilizados en el caso de
los modelos de efectos aleatorios.
No obstante, la solución en estos casos viene por la estimación por MCGF tras
haber adoptado una forma específica para la matriz de varianzas y covarianzas. Veamos
los casos más generales.
Con respecto a la heterocedasticidad, en estos modelos puede aparecer porque la
varianza de iα varía con i (en consecuencia hemos de hablar de i2ασ en vez de 2
ασ ) o
porque la varianza de itε varía con i (en consecuencia hemos de hablar de 2iεσ en vez de
2εσ ) o ambos a la vez. En consecuencia la matriz de varianzas y covarianzas del término
de perturbación es ahora:

32
( ) iTTTii iiIvvE Ω=+= '22' ιισσ αε (44)
Y la matriz inversa, 1−Ωi , sigue la expresión (32), sin mas que sustituir 2ασ y 2
εσ
por i
2ασ y 2
iεσ , respectivamente. Igualmente, el estimador GLS de δ se obtiene al
sustituir 1−Ω por 1−Ωi , en dicha ecuación. Lógicamente, reemplazando 2iασ y 2
iεσ
(valores desconocidos) por sus estimaciones, se obtiene el estimador GLS Factible, o en
dos etapas.
La estimación de 2iεσ puede efectuarse a partir de la estimación de la estimación
within. La varianza total puede estimarse a través de los residuos MCO ^
itv :
∑=
−
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−
−=
T
tiitiv vv
T 1
2^^2^
11σ obtenidos a partir de la estimación (30). A partir de aquí, se
puede obtener la estimación para i2ασ como:
2^2^2^
iivi εα σσσ −= .
En el caso de autocorrelación se procede de forma análoga. Tomaremos un
esquema de autorrelación tipo AR(1) como ejemplo. Es decir, supongamos que en el
modelo de efectos aleatorios en una dirección expresado en (29):
itiitit xy εαβμ +++= ' , ( )2,0~ εσε IIDit ; ( )2,0~ ασα IIDi (45)
Ó en términos matriciales:
iiiiTiTi vxxy +=+++= +δεαιβμι (46)
el término de perturbación itε deja de ser independiente y sigue el siguiente proceso
AR(1):

33
ititit u+= −1ρεε (47)
donde itu se distribuye de forma idéntica e independiente con media cero y varianza
u2σ .
La estimación de dicho modelo por MCG se basa en idénticos supuestos que los
de cualquier otro tipo de especificación que presenta un problema de autocorrelación
AR(1). Teniendo en cuenta que el modelo transformado mediante la expresión:
( ) ( ) itiitititit uxxyy +−+−+−=− −− αρβρρμρ 1)1( '11 (48)
presenta una perturbación ruido blanco, se puede efectuar un procedimiento iterativo del
tipo propuesto por Cochrane-Orcutt consistente, como se recordará, básicamente en lo
siguiente. La primera etapa comienza con la estimación de ρ utilizando la ecuación
(47) y los residuos de la regresión within. A continuación, se estima por MCO la
regresión (48) resultante tras utilizar el valor de ρ estimado, obteniendo un vector
inicial de estimadores. En una segunda etapa, se obtienen unos nuevos residuos within,
a partir de tales estimadores, con los que se repite el proceso. Así sucesivamente, hasta
que se alcance la convergencia.