Teoría Motor Eléctrico Bien
25
Maquinas eléctricas Se puede definir una máquina eléctrica como cualquier dispositivo que realice una transformación de energía eléctrica, siempre y cuando medie en esta transformación un campo magnético. Las máquinas eléctricas se dividen en estáticas y rotativas; las estáticas son los transformadores que ya estudiamos en la UD9. Las rotativas como su nombre indica, disponen de una parte móvil susceptible de girar alrededor de un eje y, pueden ser motores o generadores de energía eléctrica. Máquinas eléctricas rotativas Las máquinas eléctricas rotativas son dispositivos reversibles, pueden funcionar como motor o como generador. En el siguiente esquema puedes ver que un motor absorbe energía eléctrica que transforma en energía mecánica (o energía de movimiento) y, un generador absorbe energía mecánica que transforma en eléctrica. En un motor por tanto, producimos movimiento a partir de la energía eléctrica de la red y, a un generador le producimos nosotros el giro (mediante una turbina hidráulica, una turbina de gas, un motor de gasoil, un molino de viento, etc.) para que este genera fem que alimenta a una red eléctrica.
Transcript of Teoría Motor Eléctrico Bien

Maquinas eléctricas Se puede definir una máquina eléctrica como cualquier dispositivo que realice una transformación de energía eléctrica, siempre y cuando medie en esta transformación un campo magnético. Las máquinas eléctricas se dividen en estáticas y rotativas; las estáticas son los transformadores que ya estudiamos en la UD9. Las rotativas como su nombre indica, disponen de una parte móvil susceptible de girar alrededor de un eje y, pueden ser motores o generadores de energía eléctrica.
Máquinas eléctricas rotativas
Las máquinas eléctricas
rotativas son dispositivos reversibles, pueden funcionar como motor o como generador. En el siguiente esquema puedes ver que un motor absorbe energía eléctrica que transforma en energía mecánica (o energía de movimiento) y, un generador absorbe energía mecánica que transforma en eléctrica. En un motor por tanto, producimos movimiento a partir de la energía eléctrica de la red y, a un generador le producimos nosotros el giro (mediante una turbina hidráulica, una turbina de gas, un motor de gasoil, un molino de viento, etc.) para que este genera fem que alimenta a una red eléctrica.

Desde el punto de vista constructivo y funcional, las partes constituyentes de las máquinas eléctricas son las siguientes:
En el inducido son dos los efectos que puede producir el campo magnético y que ya estudiaste en la UD4 sobre electromagnetismo:
� Si por los conductores del inducido circula intensidad, se inducen en ellos fuerzas que producen el giro (motor)
� Si los conductores del inducido “ven” flujo variable, se induce en ellos fem (generador).
¿Cómo se corresponden el estator y el rotor con el inductor y el inducido? Esta correlación depende del tipo de máquina eléctrica. De todas formas la disposición más habitual es la siguiente:

Motores eléctricos
En el siguiente esquema puedes ver la gran variedad de motores eléctricos que existen hoy en día en el mercado.
No obstante desde el punto de vista de su utilización en aplicaciones
industriales, los líderes indiscutibles son los motores trifásicos de inducción (asíncronos), que estudiaremos en esta unidad. Estos motores se alimentan directamente en AC, tienen buen rendimiento, alta estabilidad, fácil conexionado y gracias a la electrónica de potencia desarrollada actualmente, se pueden realizar regulaciones de velocidad y accionamientos muy precisos. En aplicaciones de refrigeración y climatización se encargan del accionamiento de los compresores en los circuitos de fluido, tanto a nivel industrial y comercial (trifásicos) como doméstico (monofásicos).
Los motores de AC síncronos debido a sus limitaciones en cuanto a
regulación de velocidad, se utilizan solamente en aplicaciones industriales muy específicas. Una de ellas son las centrales hidráulicas de bombeo, en donde está máquina síncrona funciona alternativamente como generador y como motor. Los motores de corriente continua están quedándose obsoletos en la actualidad debido a las ventajas citadas de los motores de inducción, sobretodo desde los avances tecnológicos en cuanto a regulación de velocidad. El resto de motores se utilizan en aplicaciones muy concretas y normalmente en bajas potencias.

Generadores eléctricos
Motores trifásicos de inducción. Aspectos físicos
Los motores como todas las máquinas eléctricas rotativas, presentan estator y un rotor. El estator es el responsable del campo magnético y en el rotor se plasman las consecuencias de la acción magnética. La configuración del devanado del estator y el tipo de rotor, diferencian los diversos tipos de motores e influyen en características tan importantes como la velocidad de giro, potencia, etc.

El estator
El estator de un motor de inducción es el inductor, es decir el encargado de crear el campo magnético. Está formado por:
• Circuito magnético: tambor con forma cilíndrica y ranurado, formado de chapas de Fe aleado al Si, asiladas entre sí con Carlite, para reducir las pérdidas por corrientes parásitas. La misión de las ranuras es alojar a los conductores de los devanados.
• Circuito eléctrico: formado por tres devanados monofásicos que al
conexionarlos en estrella o triángulo, forman un devanado trifásico.
En su concepción más elemental, estos devanados son tres bobinas desfasadas 120º. Cada bobina está formada por 2 conductores diametralmente opuestos (bobina de paso diametral) y el estator precisa entonces de 6 ranuras para alojarlos (Fig. 1).
De esta forma se desaprovecha la capacidad del estator puesto que solamente son necesarias 6 ranuras para 3 bobinas. En los devanados reales la disposición es muy distinta:
• el número de ranuras es normalmente 24, 36, 48, etc. • las bobinas no son de paso diametral. • cada devanado monofásico está formado de varias de estas bobinas
conectadas en serie.
Fig. 1- Devanado estatórico elemental

Constructivamente las bobinas dependen del tipo de motor, diferenciando entre motores de BT (<1000 V) y motores de MT (>1000 V):
• Motores de BT: las bobinas son de hilo esmaltado, de tal forma que
este baño aislante garantiza el aislamiento entre ellas. (Fig. x) • Motores de MT: las bobinas son preformadas con pletinas de cobre
aisladas con materiales orgánicos apropiados (poliamida, fibra de vidrio, etc.). Fig. 2
Conductores de la bobina. Se alojan en las ranuras
Cabeza de bobina
Motor de BT Devanado de hilo esmaltado
Motor de MT Devanado de preformado
Extremos de bobina para conexiones
Bobina preformada
Fig. 2- Devanados de hilo esmaltado y preformados.

El rotor
Es la parte giratoria y el inducido en los motores de inducción. Está formado por:
• Circuito magnético: formado de chapas de Fe aleado al Si, asiladas entre sí con Carlite, para reducir las pérdidas por corrientes parásitas.
• Circuito eléctrico: formado por un devanado trifásico. En función de la
forma constructiva de este devanado, distinguimos entre rotor de jaula de ardilla y rotor bobinado.
Rotor de jaula de ardilla La forma contractiva del devanado es realmente peculiar. Los conductores del rotor son barras de aluminio fundido, cortocircuitadas en sus extremos mediante anillos, que también son de aluminio. El conjunto forma una estructura que recuerda a una “jaula de ardilla”, de ahí su nombre. La jaula a su vez se encuentra embebida en la masa ferromagnética del rotor, que dispone de ranuras para alojar los conductores (Fig. 3).
Fig. 3- Rotor de jaula de ardilla.
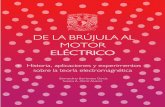
Observa que el rotor de jaula de ardilla, no presenta conexiones eléctricas con el exterior, entonces ¿cómo es posible que circule intensidad por las barras rotóricas, sin conectarlas a ninguna toma de tensión? La respuesta la encontrarás más adelante. Se comprobó experimentalmente que el motor presenta menos vibraciones y más estabilidad si las barras rotóricas se inclinan respecto al eje de la jaula (Fig. 4). Existen además otras disposiciones constructivas, como los rotores de doble jaula o de ranuras profundas, para mejorar el par electromagnético suministrado por el motor en el arranque (Fig. 4).
Fig. 4- Otros tipos de jaula de ardilla rotórica.

Para que te hagas una idea más exacta del ensamblaje entre la carcasa del motor, el estator con sus ranuras y devanados y el rotor de jaula, puedes ver la Fig. 5
Fig. 5- Cortes de un motor de jaula de ardilla.

Rotor bobinado o devanado Ante todo debes saber que este tipo de rotores está actualmente extinguiéndose y que el 95 % de los motores de inducción son actualmente de jaula de ardilla. No obstante no está de más que te “suene” por si acaso te encuentras con alguno (improbable). La principal diferencia es que los conductores provienen de un devanado trifásico de hilo esmaltado, similar a los devanados estatóricos. Un extremo de cada devanado se conecta en estrella y el otro se conecta con el exterior mediante tres anillos que rozan con tres escobillas. En el exterior hay que conectar en estrella mediante cables, para cerrar el circuito rotórico (Fig. 6). En vista de estas conexiones y del rozamiento anillos-escobillas, estos motores necesitan un mantenimiento del que carecen los de jaula.
En motores de rotor bobinado de gran potencia, se conectan durante el arranque resistencias al rotor, para aumentar el par de arranque, que posteriormente se cortocircuitan. Este sistema de arranque al igual que los motores de rotor bobinado, está actualmente obsoleto.
Actividad 1 ¿Qué crees que pasaría si conectamos el estator a la red y se nos olvidan las conexiones rotóricas externas?
Fig. 6- Rotor bobinado: aspecto y circuito.
Motores trifásicos de inducción. Funcionamiento y características Los motores de inducción presentan la particularidad de que las
intensidades necesarias para producir fuerzas de giro, son inducidas en el rotor. Basta por tanto con conexionar el motor a la red eléctrica para obtener un campo magnético giratorio, y el resto del proceso viene por sí solo, lo cual facilita mucho la utilización y explotación de estos motores. La velocidad de giro del rotor y su capacidad para producir par de giro, van ligadas en la “curva de par” del motor.
El campo magnético giratorio
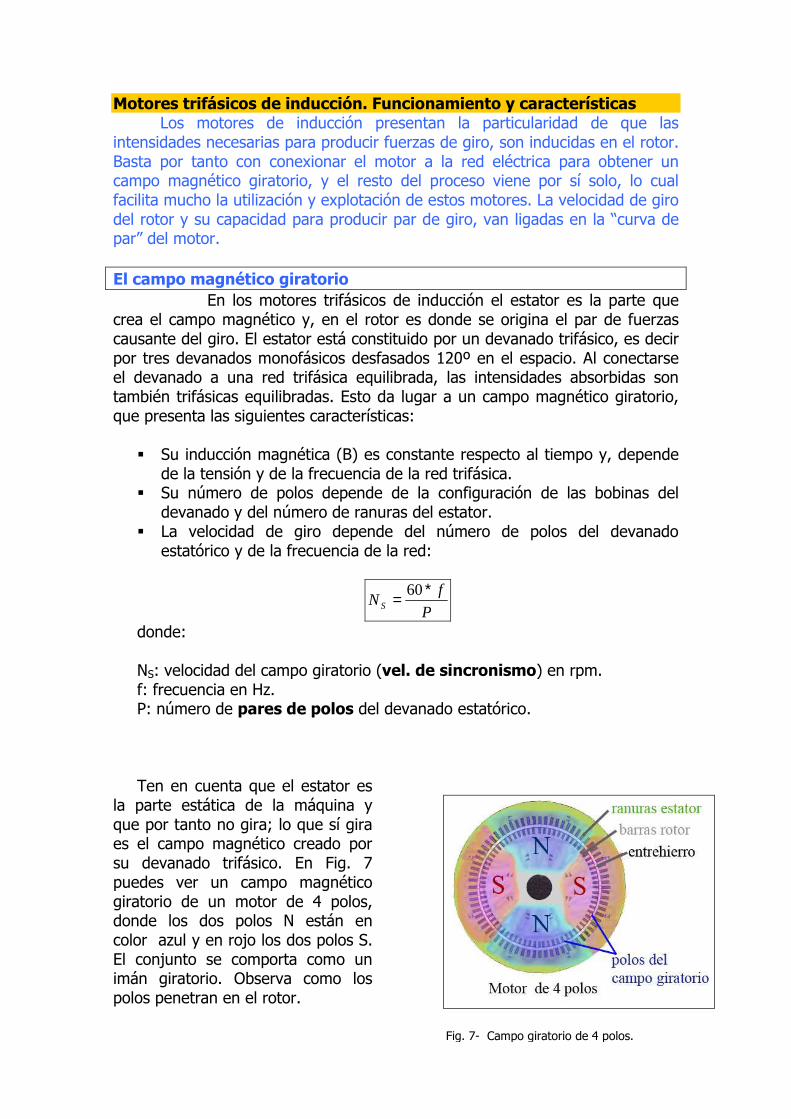
En los motores trifásicos de inducción el estator es la parte que crea el campo magnético y, en el rotor es donde se origina el par de fuerzas causante del giro. El estator está constituido por un devanado trifásico, es decir por tres devanados monofásicos desfasados 120º en el espacio. Al conectarse el devanado a una red trifásica equilibrada, las intensidades absorbidas son también trifásicas equilibradas. Esto da lugar a un campo magnético giratorio, que presenta las siguientes características:
� Su inducción magnética (B) es constante respecto al tiempo y, depende de la tensión y de la frecuencia de la red trifásica.
� Su número de polos depende de la configuración de las bobinas del devanado y del número de ranuras del estator.
� La velocidad de giro depende del número de polos del devanado estatórico y de la frecuencia de la red:
P
fN S
∗= 60
donde: NS: velocidad del campo giratorio (vel. de sincronismo) en rpm. f: frecuencia en Hz. P: número de pares de polos del devanado estatórico.
Ten en cuenta que el estator es la parte estática de la máquina y que por tanto no gira; lo que sí gira es el campo magnético creado por su devanado trifásico. En Fig. 7 puedes ver un campo magnético giratorio de un motor de 4 polos, donde los dos polos N están en color azul y en rojo los dos polos S. El conjunto se comporta como un imán giratorio. Observa como los polos penetran en el rotor.
Fig. 7- Campo giratorio de 4 polos.

La frecuencia de las redes eléctricas es en Europa 50 Hz, de tal forma que
las velocidades de sincronismo más habituales de los motores de inducción son las siguientes:
� 2 polos � P=1 � )(30001
5060rpmN S =∗=
� 4 polos � P=2 � )(15002
5060rpmN S =∗=
� 6 polos � P=3 � )(10003
5060rpmN S =∗=
� 8 polos � P=4 � )(7504
5060rpmN S =∗=
Supongamos un campo magnético de 4 polos, su velocidad de sincronismo es 1500 (rpm). Es fácil calcular que el tiempo que invierte en una vuelta son 40 (ms). En Fig. 8 puedes ver la posición de los polos de campo (2 norte y 2 sur) para los tiempos de 0, 10 ms (1/4 de vuelta) y 20 ms (media vuelta).
¡Un devanado trifásico crea un campo giratorio de inducción magnética
constante, cuyo número de polos depende de su diseño y cuya velocidad se llama “velocidad de sincronismo (NS)!
Fig. 8- Movimiento de un campo giratorio de 4 polos y 1500 rpm.
Principio de funcionamiento
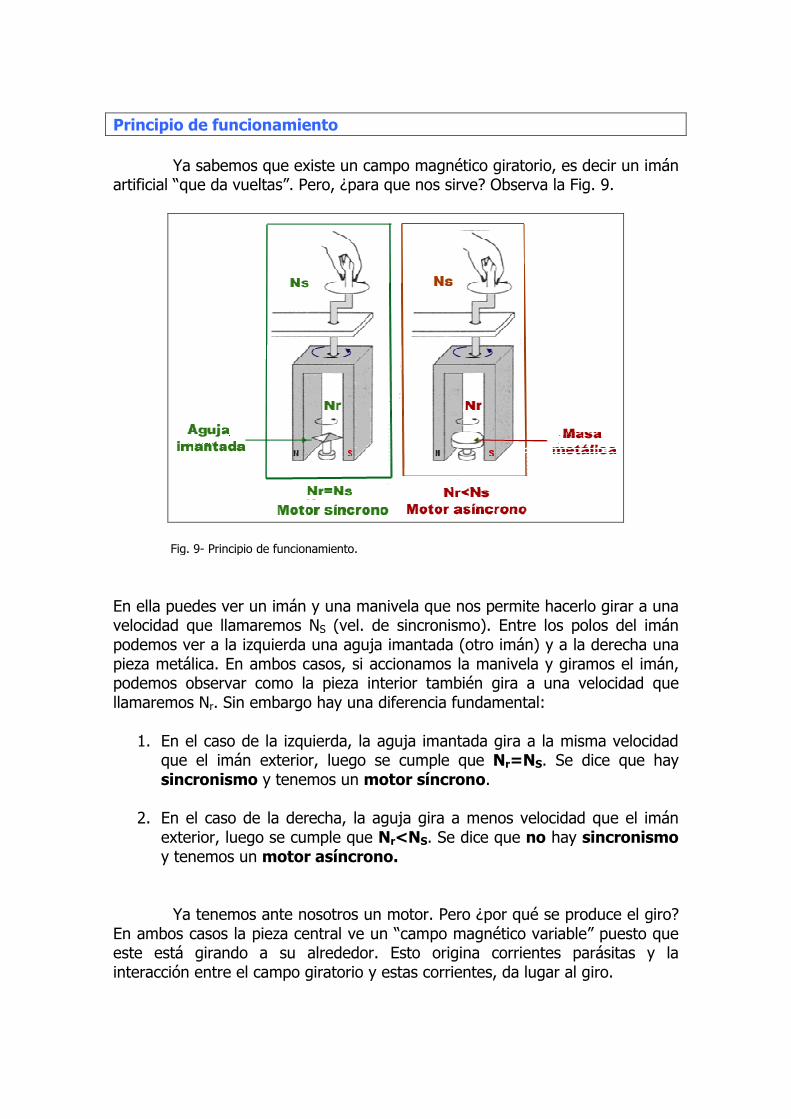
Ya sabemos que existe un campo magnético giratorio, es decir un imán artificial “que da vueltas”. Pero, ¿para que nos sirve? Observa la Fig. 9.
En ella puedes ver un imán y una manivela que nos permite hacerlo girar a una velocidad que llamaremos NS (vel. de sincronismo). Entre los polos del imán podemos ver a la izquierda una aguja imantada (otro imán) y a la derecha una pieza metálica. En ambos casos, si accionamos la manivela y giramos el imán, podemos observar como la pieza interior también gira a una velocidad que llamaremos Nr. Sin embargo hay una diferencia fundamental:
1. En el caso de la izquierda, la aguja imantada gira a la misma velocidad que el imán exterior, luego se cumple que Nr=NS. Se dice que hay sincronismo y tenemos un motor síncrono.
2. En el caso de la derecha, la aguja gira a menos velocidad que el imán
exterior, luego se cumple que Nr<NS. Se dice que no hay sincronismo y tenemos un motor asíncrono.
Ya tenemos ante nosotros un motor. Pero ¿por qué se produce el giro? En ambos casos la pieza central ve un “campo magnético variable” puesto que este está girando a su alrededor. Esto origina corrientes parásitas y la interacción entre el campo giratorio y estas corrientes, da lugar al giro.
Fig. 9- Principio de funcionamiento.

En esta unidad estudiamos los motores asíncronos que también se llaman “de inducción”. En estos la pieza metálica de la Fig. 9 es el rotor y en él, se inducen las corrientes necesarias para producir el giro; es decir el rotor de los motores de inducción no se conecta a ninguna red eléctrica, porque las corrientes que por él circulan son inducidas. No confundas esto con la conexión “estrella exterior” que debe realizarse a los motores de rotor bobinado. ¡ El rotor de los motores de inducción, no se conecta a ninguna red eléctrica, porque sus corrientes son inducidas por el campo giratorio ¡ El principio de funcionamiento de los motores de inducción o motores asíncronos, sigue los siguientes pasos:
1. Se conecta el estator a la red trifásica y se origina un campo giratorio de velocidad NS (vel. de sincronismo).
2. Los conductores del rotor “ven” un flujo variable puesto que el campo magnético está girando, por tanto se induce en ellos fem.
3. Si los conductores del rotor forman un circuito cerrado, se inducen corrientes rotóricas.
4. La interacción entre el campo magnético y las corrientes rotóricas produce el par de fuerzas responsable del giro, con lo cual el rotor comienza a girar a una velocidad Nr inferior a la del campo magnético. (Nr<NS).
Motor asíncrono
Estator
Rotor
Devanado trifásico alimentado con sistema trifásico de tensiones
Conductores en cortocircuito
Sistema Trifásic
Conexión al Campo giratorio (Ns)
FEM inducida por el campo giratorio en los
conductores del rotor
Circulación de corriente por los conductores del
rotor
Fuerza sobre los conductores del
rotor Giro de la máquina (Nr<Ns)
Sistema Trifásico
Si te das cuenta, el principio de funcionamiento coincide con el del transformador, donde la corriente del secundario es inducida. El rotor sería el secundario del trafo, donde se induce fem y, si el circuito se cierra, se establece intensidad. ¡Un motor de inducción se comporta como un transformador, donde el secundario es el rotor y el primario el estator!
El deslizamiento
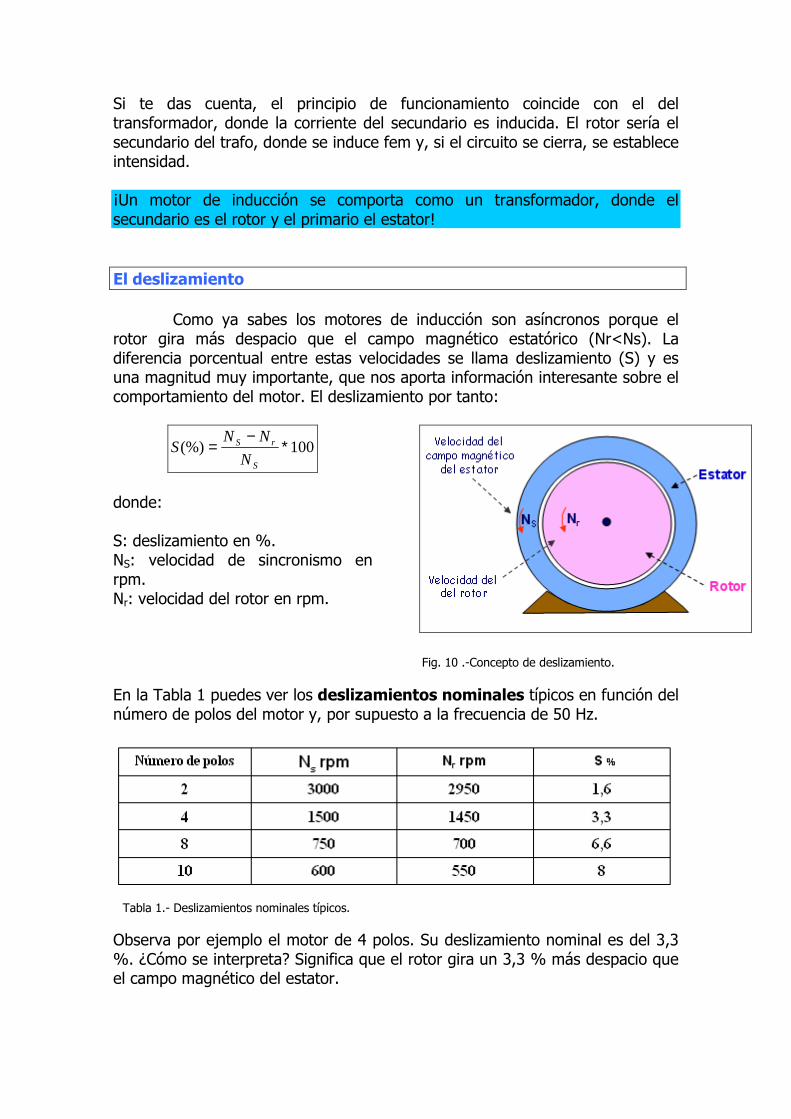
Como ya sabes los motores de inducción son asíncronos porque el rotor gira más despacio que el campo magnético estatórico (Nr<Ns). La diferencia porcentual entre estas velocidades se llama deslizamiento (S) y es una magnitud muy importante, que nos aporta información interesante sobre el comportamiento del motor. El deslizamiento por tanto:
100(%) ∗−
=S
rS
N
NNS
donde: S: deslizamiento en %. NS: velocidad de sincronismo en rpm. Nr: velocidad del rotor en rpm.
En la Tabla 1 puedes ver los deslizamientos nominales típicos en función del número de polos del motor y, por supuesto a la frecuencia de 50 Hz.
Observa por ejemplo el motor de 4 polos. Su deslizamiento nominal es del 3,3 %. ¿Cómo se interpreta? Significa que el rotor gira un 3,3 % más despacio que el campo magnético del estator.
Fig. 10 .-Concepto de deslizamiento.
Tabla 1.- Deslizamientos nominales típicos.

La velocidad del rotor (Nr) y el deslizamiento (S) evolucionan al revés; a menos velocidad, más deslizamiento y viceversa. ¡Un deslizamiento elevado, implica que el rotor del motor gira a una velocidad lenta; sin embargo el campo magnético estatórico, siempre gira a la velocidad de sincronismo!
Actividad 2 ¿Podría el rotor girar a la misma velocidad que el campo estatórico?
El par electromagnético o par motor (M)
Para entender el
funcionamiento de un motor de inducción en carga, es fundamental analizar la “curva del par” y la “curva de intensidad”. Ambas representan la evolución del par electromagnético y de la intensidad consumida por el motor, en función de la velocidad de giro del rotor. Pero, ¿qué es el par? La Dinámica es una rama de la Física que estudia el movimiento y sus causas. Uno de los postulados fundamentales de esta ciencia dice que las fuerzas producen traslaciones y los pares de fuerzas producen giros; cuando coges el volante del coche y lo giras (con ambas manos) no estás aplicando una fuerza, sino un par de fuerzas (causa) que produce el giro (efecto). Los motores generan un par de fuerzas electromagnético cuyo efecto para producir el giro depende además de la distancia
entre las fuerzas, que en este caso es el diámetro del rotor (Fig. 11). El par se designa con la letra M y se determina como:
dFM ∗= donde: F: fuerza electromagnética en newtons (N). d: diámetro del rotor en metros (m). M: par de fuerzas en newtons por metro (N*m).
¡El par electromagnético de un motor, es la causa de que se produzca el giro!
Fig. 11 .-Concepto par de fuerzas.

Seguimos con la Física. En el giro del rotor intervienen tres factores:
� Causa del giro (par electromagnético generado por el motor). � Oposición al giro (par resistente de la carga mecánica). � Inercia (solo aparece cuando hay aceleración).
La relación entre estos factores es:
Causa del giro = Oposición al giro + Inercia
La lectura de esta ecuación es la siguiente: “para producir un movimiento, hay que vencer la oposición a ese movimiento y además, a la inercia”. Vamos a razonar con el siguiente ejemplo. ¿Ves esa pesa de 50 Kg de Fig. 12 y la barra para tirar y levantarla? ¿Con qué fuerza hay que tirar de la barra para levantar la pesa? Seguro que respondes que con 50 Kg y eso es cierto solo a medias. Inicialmente si aplicas 50 Kg no la vas a mover; fíjate en la ecuación:
Causa = Oposición (50 Kg.) + Inercia
La pesa está parada y para moverla hay que acelerar y vencer su propio peso más la inercia, luego inicialmente hay que “dar un tirón” superior a 50 Kg. Una vez la pesa
esté ascendiendo a velocidad constante, ya no hay inercia que vencer y la subirás aplicando 50 Kg.
50 Kg
pesa
barra
polea
Los motores funcionan exactamente igual. Tendrán que “tirar” con su par electromagnético y vencer el par resistente de la carga (equivalente a los 50 Kg del ejemplo) más la inercia. Cuando un motor ya ha sido arrancado y gira a velocidad constante, no hay inercia que vencer y el par electromagnético (par motor) coincide con el par resistente de la carga.
A velocidad constante –> Mmotor=Mcarga
Fig. 12
Curvas de par y de intensidad
En Fig. 13 puedes ver la curva del par motor (M) y de intensidad (I) (intensidad estatórica absorbida de la red), en función de la velocidad del motor (Nr). Recuerda que la velocidad de sincronismo del campo giratorio (Ns) es constante. Vamos a analizarlas punto a punto, tomando como referencia el punto 1, que es punto nominal:
� Punto 1: es el punto de funcionamiento nominal. La velocidad es alta y el deslizamiento bajo, como ya viste el la Tabla 1 del apartado anterior. Como es lógico en este punto la intensidad es la nominal, luego el motor está preparado para soportarla indefinidamente sin calentamientos excesivos.
� Punto 2: en este punto el motor debe de producir un par mayor (porque
la carga “pesa más”), lo que supone más consumo de intensidad. La velocidad es más baja y el deslizamiento mayor. El motor está sobrecargado y los calentamientos pueden ser peligrosos si la situación se mantiene durante mucho tiempo. Además estos calentamientos suponen una pérdida de energía, luego el rendimiento en este punto es malo.
� Punto 3: el par y la intensidad son aún mayores que en el pto 2, luego el
motor está muy sobrecargado corriendo peligro de quemarse. La velocidad es más baja y el deslizamiento mayor.
� Punto 4: es el punto de par máximo, donde la intensidad es elevadísima,
al igual que los calentamientos. La velocidad es más baja que en el pto 3 y el deslizamiento mayor. El motor no puede permanecer en este punto porque se quemaría rápidamente.
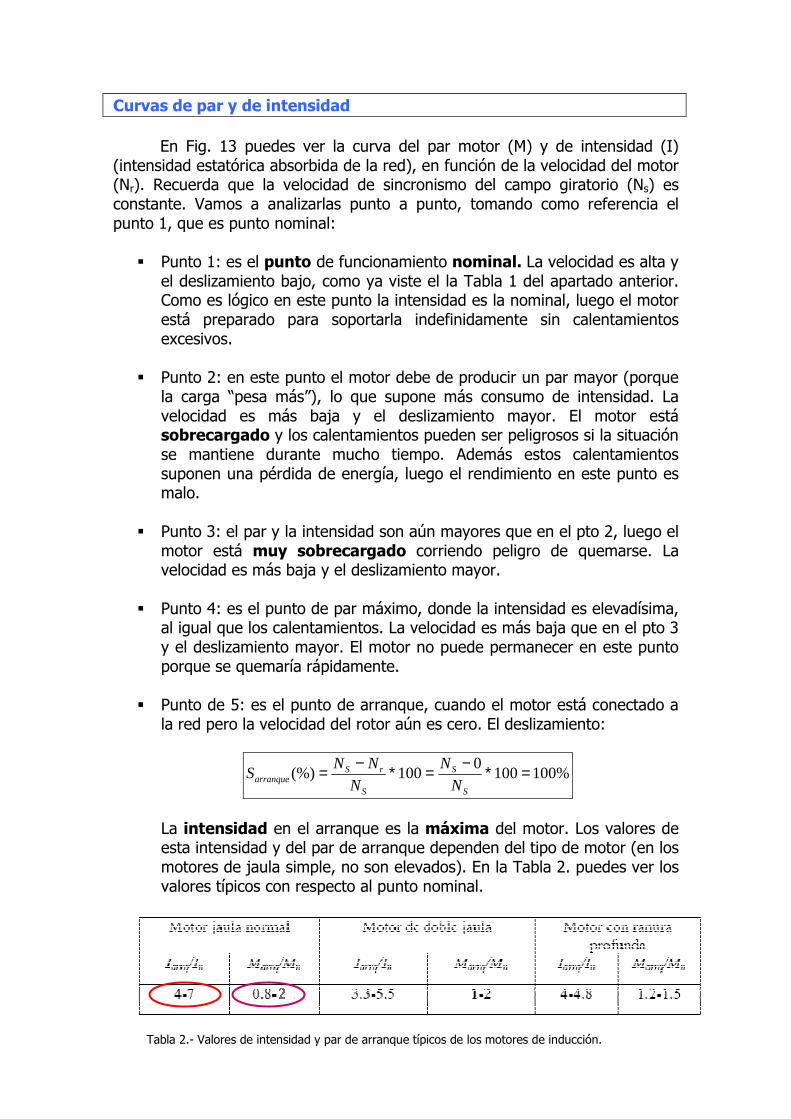
� Punto de 5: es el punto de arranque, cuando el motor está conectado a
la red pero la velocidad del rotor aún es cero. El deslizamiento:
%1001000
100(%) =∗−=∗−=S
S
S
rSarranque N
N
N
NNS
La intensidad en el arranque es la máxima del motor. Los valores de esta intensidad y del par de arranque dependen del tipo de motor (en los motores de jaula simple, no son elevados). En la Tabla 2. puedes ver los valores típicos con respecto al punto nominal.
Tabla 2.- Valores de intensidad y par de arranque típicos de los motores de inducción.

� Punto 6: funcionamiento en vacío, sin carga mecánica acoplada al eje. El motor solo tiene que vencer los rozamientos, luego la velocidad es muy elevada (próxima a la de sincronismo). La intensidad por este motivo es la mínima del motor. Sería equivalente en el ejemplo anterior, a quitar la pesa y tirar de la barra; solo habría que vencer el rozamiento del cable con la polea. El deslizamiento es muy bajo.
Ejemplo: NS = 1500 (rpm) Nr (en vacío)=1490 (rpm)
M(Nm)
S
M arranque
M nominal1
4
3
25
6
Nr (rpm)
S
I(A)
I nominal
I arranque
M máximo
M vacio
I vacío
Nr (rpm)
%66,01001500
14901500S vacío =∗−=
Fig. 13.- Curvas de par y de intensidad.

Arranque y punto de funcionamiento del motor
Como viste antes en el ejemplo de la pesa de 50 Kg, inicialmente hay
que aplicar algo más de 50 Kg para vencer la inercia. En los motores pasa lo mismo en el arranque; para que un motor pueda arrancar, el par de arranque debe ser superior al par resistente de la carga. Cuanto más superior sea, más rápidamente alcanzará la velocidad de funcionamiento.
acarranque MM arg arranque deCondición >→
Fíjate en Fig. 14 donde tenemos un motor de 2 polos y 3000 (rpm) de velocidad de sincronismo. En el arranque el par del motor supera al resistente, luego el motor arrancará. El punto de funcionamiento del motor será la intersección entre la curva de par del motor y el valor del par resistente de la carga; este punto es el punto 2 donde la velocidad es 2900 (rpm). Luego el motor acelera desde 0 hasta llegar a 2900 (rpm), permaneciendo a esta velocidad hasta que ocurra algún cambio en sus condiciones de trabajo.
Punto Nominal
M(Nm)
S
M arranque
M nominal
1
2
M máximo
3000 rpm2900 rpm2935 rpm
M carga
Punto de funcionamiento
Nr (rpm)
se produce el arranque
Observa el punto 1 o punto nominal, cuya velocidad es 2935 (rpm). ¿Qué diferencias hay entre el punto de trabajo de nuestro motor (punto 2) y el punto nominal?
� El motor genera más par y gira más despacio en el punto 2. � Por este motivo, absorbe algo más de intensidad que el en punto
nominal (ver Fig. 13), luego está ligeramente sobrecargado.
Fig. 14. El motor funciona en el punto 2.

� El deslizamiento en el punto 2 es mayor:
%33,31003000
29003000(%)2 =∗−=ptoS
%16,21003000
29353000(%)min1 =∗−== alnoptoS
� Al consumir más intensidad, presenta más pérdidas de calor y menos
rendimiento. Después de esta comparativa, obtenemos una conclusión muy interesante sobre el funcionamiento de los motores:
Nuestro motor está ligeramente sobrecargado, consumiendo algo más de intensidad que la nominal. ¿Es esto peligroso? ¿Corre riesgo de quemarse? No si la sobrecarga es ligera, porque los fabricantes diseñan los motores con la capacidad de sobrecargarse en un 125 % aproximadamente, durante un determinado tiempo, sin que los calentamientos sean excesivos. Ante sobrecargas mayores entonces la vida del motor corre serio peligro y serán las protecciones las que deban de actuar y desconectarlo de la red. ¡Un motor trifásico de inducción presenta buenas características a velocidades altas y deslizamientos bajos. Por encima del punto nominal se puede sobrecargar en un 125 % durante un tiempo, sin que los calentamientos sean peligrosos!
{SSii aauummeennttaa MMccaarrggaa
disminuye la velocidad
aumenta el deslizamiento
aauummeennttaa llaa iinntteennssiiddaadd
ddiissmmiinnuuyyee eell rreennddiimmiieennttoo
aauummeennttaa llaass ppéérrddiiddaass

Rendimiento
Como sabes el motor absorbe potencia activa eléctrica de la red y la convierte en potencia mecánica de movimiento. Sin embargo se deja en el camino parte de la potencia, que se transforma en calor (pérdidas). En Fig. 15 puedes ver un balance de potencia en un motor de inducción.
El rendimiento es por tanto:
100(%) ∗=Pele
Pmecη
y depende del punto de funcionamiento del motor. El valor típico en el punto nominal es 80 % y disminuye al aumentar el deslizamiento y sobrecargarse el motor.
Actividad 3 ¿Por qué crees que los motores tienen peor rendimiento que los transformadores?
Fig. 15. Balance de potencia.

Características nominales y conexionado
Son las características de funcionamiento cuando trabaja en el punto nominal y sus las óptimas del motor. Las podemos ver en la placa de características que llevan todos los motores (Fig. 16).
En la Unidad didáctica 7 sobre “redes trifásicas” ya estudiaste la doble posibilidad de conectar los receptores trifásicos, tanto en estrella como en triángulo, en función de la tensión nominal de la red. Recuerda que de las dos tensiones, la mayor corresponde a la estrella y la pequeña al triángulo. Además la disposición de bornes en la caja es la que puedes recordar en Fig. 17.
Fig. 16- Placa de características de un motor trifásico.
Fig. 17- Caja de bornes y conexiones.

Las características nominales de los motores que debes tener en cuenta son:
� Tensiones nominales: son dos valores, el mayor para conectar en estrella y el menor para conectar en triángulo. En Fig. 16 son 400/230 (V).
� Corrientes nominales: las absorbidas de la red cuando el motor trabaja
en el punto nominal, de tal forma que el fabricante garantiza la correcta refrigeración. En Fig. 16 son 29/50 (A).
� Velocidad nominal: la velocidad de giro del rotor en el punto nominal. Es
un valor alto próximo al de sincronismo. En Fig. 16 es 2910 (rpm), luego el motor es de 3000 (rpm) y dos polos.
� Potencia mecánica nominal: es la potencia que el motor entrega a la
carga mecánica en forma de movimiento, cuando trabaja en el punto nominal. En Fig. 16 es 20 (CV).También se la llama potencia útil, y se determina en cualquier punto de funcionamiento con la siguiente expresión:
rmec NMP ∗=602π
donde: Pmec: potencia mecánica entregada a la carga en watios (W). M: par motor en newtons por metro (Nm). Nr: velocidad del motor (rotor) en rev/min (rpm).
Fig. 18- Caja de bornes en conexión estrella.

Normalmente se expresa en caballos de vapor (CV). Recuerda que:
1 CV = 736 W
� Par nominal: normalmente no viene en la placa de características, pero lo podemos determinar, aplicando la fórmula anterior de la potencia mecánica, en el punto nominal.
� Rendimiento nominal: no suele verse en las placas de características y su
valor típico es del 80 %. � En la placa del motor podemos ver otros detalles prácticos interesantes
como el grado de protección (en Fig. 16 es IP54), el código de refrigeración y la clase de aislamiento.
Actividad 4 En la foto puedes ver la placa de un motor Siemens. Si se conecta sobre una red de 400 (V) y 50 (Hz), determina:
1. El tipo de conexión dibujando la caja de bornes. 2. La corriente nominal. 3. La velocidad y el deslizamiento nominal. 4. La potencia activa nominal, absorbida de la red. 5. El rendimiento nominal.