Trabajo de Bode
13
Análisis de Bode Introducción El análisis de sistemas de control de retroalimentación mediante el método de Bode es equivalente a análisis de Nyquist en ambas técnicas emplean representaciones gráficas de la función de respuesta de frecuencia de lazo abierto GH (ω ), donde GH ( ω ) se refiere a un tiempo discreto o un sistema de tiempo continuo. Sin embargo, los diagramas de Bode consisten en dos gráficos: la magnitud de la GH (ω ), y el ángulo de fase de GH ( ω ) ,ambos trazan como una función de la frecuencia de ω . Escalas logarítmicas se utilizan generalmente para los ejes de frecuencia | GH ( ω) | . Los diagramas de Bode ilustran claramente la relativa estabilidad de un sistema. De hecho, son los márgenes de ganancia y de fase a menudo se define en términos de diagramas de Bode (vea el ejemplo 10.1). Estas medidas de la estabilidad relativa pueden ser determinadas para un sistema en particular con un mínimo de esfuerzo computacional utilizando los diagramas de Bode, especialmente para aquellos casos donde existen datos de respuesta de frecuencia experimental. Escalas logarítmicas y Diagramas de BODE Se utilizan escalas logarítmicas para Diagramas de Bode porque simplifica considerablemente su construcción, manipulación y la interpretación. Una escala logarítmica se utiliza para los ω-ejes (abscisas) debido a la magnitud y la fase ángulo puede ser representada gráficamente a través de una gama de frecuencias mayor que con los ejes de frecuencia lineales, todas las frecuencias que igualmente acentuados y esos gráficos para sistemas de tiempo continuo a menudo resultan en líneas rectas (sección 15.4). La magnitud | P ( ω) | de cualquier función de respuesta de frecuencia P ( ω) para cualquier valor de ω se representa en una escala logarítmica en unidades de decibelios (dB), donde db= 20log 10 | P ( ω) | (15.1) [Ver también ecuación (10.4).] Ejemplo 15.1;
description
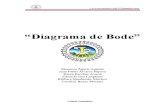
Diagramas de Bode
Transcript of Trabajo de Bode

Análisis de Bode Introducción
El análisis de sistemas de control de retroalimentación mediante el método de Bode es equivalente a análisis de Nyquist en ambas técnicas emplean representaciones gráficas de la función de respuesta de frecuencia de lazo abierto GH (ω), donde GH (ω ) se refiere a un tiempo discreto o un sistema de tiempo continuo. Sin embargo, los diagramas de Bode consisten en dos gráficos: la magnitud de la GH (ω), y el ángulo de fase de GH (ω ) ,ambos trazan como una función de la frecuencia de ω. Escalas logarítmicas se utilizan generalmente para los ejes de frecuencia |GH (ω)|.
Los diagramas de Bode ilustran claramente la relativa estabilidad de un sistema. De hecho, son los márgenes de ganancia y de fase a menudo se define en términos de diagramas de Bode (vea el ejemplo 10.1). Estas medidas de la estabilidad relativa pueden ser determinadas para un sistema en particular con un mínimo de esfuerzo computacional utilizando los diagramas de Bode, especialmente para aquellos casos donde existen datos de respuesta de frecuencia experimental.
Escalas logarítmicas y Diagramas de BODE
Se utilizan escalas logarítmicas para Diagramas de Bode porque simplifica considerablemente su construcción, manipulación y la interpretación.
Una escala logarítmica se utiliza para los ω-ejes (abscisas) debido a la magnitud y la fase ángulo puede ser representada gráficamente a través de una gama de frecuencias mayor que con los ejes de frecuencia lineales, todas las frecuencias que igualmente acentuados y esos gráficos para sistemas de tiempo continuo a menudo resultan en líneas rectas (sección 15.4).
La magnitud |P(ω)| de cualquier función de respuesta de frecuencia P(ω ) para cualquier valor de ω se representa en una escala logarítmica en unidades de decibelios (dB), donde
db=20 log10|P (ω)|(15.1)
[Ver también ecuación (10.4).]
Ejemplo 15.1; Si |P(2)| = |GH (2)|=10, la magnitud es 20 log10|10|=20db.
Ya que el decibelio es una unidad logarítmica, la magnitud db de una función de respuesta de frecuencia integrada de un producto de términos es igual a la suma de las magnitudes db de los términos individuales. Así, cuando se emplea la escala logarítmica, la gráfica de la magnitud de una función de respuesta de frecuencia expresable como un producto de más de un término se puede obtener mediante la adición de las parcelas de magnitud db individuales para cada término de producto.
El logotipo gráfico de magnitud versus db, se llama la gráfica de la magnitud de Bode, y el ángulo de fase versus logotipo de trama, es la trama ángulo de fase de Bode. La

gráfica de la magnitud de Bode es a veces llamado el modulo del registro de diagrame en literatura
Ejemplo 15.2; La magnitud del diagrama de Bode para la función de respuesta de frecuencia de tiempo continuo
P ( jω )=100[1+ j( ω10 )]
1+ jω
puede obtenerse mediante la adición de los diagramas de magnitud de Bode
para 100,1+ j( ω10 ) ,y 1(1+ jω )
La forma Bode y la Ganancia Bode para Sistemas de Tiempo Continuo
Es conveniente utilizar la llamada forma Bode de una función de respuesta de frecuencia de tiempo continuo cuando utilizamos diagramas de Bode para el análisis y el diseño debido a las aproximaciones asintóticas en la Sección 15.4.
La forma de Bode para la función
K ( jω+ z¿¿1)( jω+z¿¿2)… ( jω+z¿¿m)( jω )l( jω+ p¿¿1)( jω+ p¿¿2)…( jω+ p¿¿n)¿¿¿
¿¿¿
donde l es un entero no negativo, se obtiene mediante la factorización toda z i y p y reordenando en la formar
[ K∏i=1
m
z i
∏i=1
n
pi ](1+ jωz1 )(1+ jωz2 )…( 1+ jωzm )
( jω )l(1+ jωp1 )( 1+ jωp2 )…( 1+ jωpn ) (15.2)
La ganancia K B Bode se define como el coeficiente del numerador en la ecuación (15.2):
K B=K∏
i=1
m
z i
∏i=1
n
pi
(15.3)

Diagramas de Bode de la Respuesta Simple en Frecuencia de Funciones de Tiempo Continuo y sus Aproximaciones
La constante K B tiene una magnitud de ¿KB∨¿, un ángulo de fase de 0 "si K B es positiva, y - 180" si K B, es negativo. Por tanto, los diagramas de Bode para K B son
líneas rectas horizontales simplemente como se muestra en las Figs. 15-1 y15-2.
La frecuencia de los diagramas de Bode para (o función de transferencia sinusoidal) para un polo de orden l en el origen es
1( jω )l
(15.4)
Los diagramas de Bode para esta función son líneas rectas, como se muestra en la Figs. 15-3 y 15-4.

Para un cero de orden l en el origen
( jω)l (15.5)
Los diagramas de Bode son las reflexiones sobre las líneas 0-db y 0º de las Figs. 15-3 y 15-4, como se muestra en las Figs. 15-5 y 15-6.

Considere la función de transferencia de un polo simple p(s+ p)
, p>0. Los diagramas de Bode para su función de respuesta en frecuencia
11+ jωp
(15.6)
se dan en las Figs. 15-7 y 15-8. Tenga en cuenta que la escala de frecuencia logarítmica se normaliza en términos de p.

Para determinar las aproximaciones asintóticas para estos diagramas de Bode, vemos que para ωp≪1 , o ω≪ p,
20 log10| 11+ jωp |=20 log10=0db

Y para ωp≫1 , o ω≫ p,
20 log10| 11+ jωp |=20 log10| 1jωp |=−20 log10(ωp )
Por tanto, la gráfica de la magnitud de Bode se aproxima asintóticamente a una línea recta horizontal a 0 db como ωp se acerca a cero y −20log10
ωp como ωp
tiende a infinito (Fig. 15-7). Tenga en cuenta que esta asíntota de alta frecuencia es una línea recta con una pendiente de −20db/década, o −6db /octava cuando se representa en una escala de frecuencia logarítmica como se muestra en la Fig. 15-7. Los dos asíntotas se cortan en la frecuencia de corte ω=p rad
sec . Para determinar el ángulo de fase de la asíntota, vemos que
paraωp≪1 , o ω≪ p,
arg( 1
1+ jωp )=−tan−1 (ωp )|ω≪p
≃0 º
Y para ωp≫1 , o ω≫ p,
arg( 1
1+ jωp )=−tan−1 (ωp )|ω≫ p
≃−90 º
De este modo la gráfica de ángulo de fase de Bode se acerca asintóticamente a 0º como ωp se aproxima a cero, y -90º como ωp se aproxima al infinito, como se muestra en la Fig. 15-8. Un aspecto negativo de la pendiente en línea recta de la asíntota se puede utilizar para unir el 0º a la asíntota y el -90º dibujando una línea desde el 0º de la asíntota en ω= p
5 hacia el -90º de la asíntota ω=5 p. Observe que es tangente a las curvas exactas en ω=p.
Los errores introducidos por estas aproximaciones asintóticas se muestran en la Tabla 15-1 para la función de transferencia de un solo polo en varias frecuencias.,

(15-1) Errores asintóticos para 1
1+ jωp
ω p5
p2 p 2 p 5 p
Error de Magnitud
(db)−0.17 −0.96 −3 −0.96 −0.17
Error de ángulos de
fase−11.3º −0.8º 0º +0.8º +11.3 º
Las graficas de Bode y sus aproximaciones asintóticas para la función de la respuesta en frecuencia del cero simple
1+ jωz1
(15.7)
Son mostradas en las Figs. 15-9 y 15-10


Las gráficas de Bode y sus aproximaciones asintóticas para la función de la respuesta en frecuencia de segundo orden con polos complejos
1
1+ j 2ζ ωωn
−( ωωn )2 0≤ ζ ≤1 (15.8)
se muestran en las Figs. 15-11 y 15-12. Tenga en cuenta que el coeficiente de amortiguamiento ζ es un parámetro en estos gráficos.
La magnitud asíntota se muestra en la Fig. 15-11 tiene una frecuencia de esquina en ω=ωn, y una pendiente doble de alta frecuencia que la de la asíntota para el caso de un polo simple de la fig. 15-7. El ángulo de fase de la asíntota es similar a la de la Fig. 15-8, excepto que la porción de alta frecuencia es en –180º en lugar de –90º y el punto de tangencia, o inflexión, es a -90º.
Los diagramas de Bode para un par de ceros complejos son las reflexiones acerca del 0 dB y 0º de líneas de aquellos para los polos complejos.
Construcción de las Gráficas de Bode para Sistemas de Tiempo Continuo
Los diagramas de Bode de funciones de respuesta en frecuencia de tiempo continuo se pueden construir mediante la suma de las contribuciones de magnitud y ángulo de fase de cada polo y cero (o pares de polos complejos y ceros). Las aproximaciones asintóticas de estas graficas son a menudo

suficientes. Si se desean gráficos más precisos, muchos paquetes de software están disponibles para llevar a cabo rápidamente esta tarea.
Para la función de respuesta en frecuencia en lazo abierto en general
GH ( jω )=K R(1+ jωz1 )( 1+ jωz2 )… (1+ jωzm )
( jω )l( 1+ jωp1 )( 1+ jωp2 )…( 1+ jωpn ) (15.9)
Cuando l es un número entero positivo o cero, la magnitud y ángulo de fase se da por
20 log10|GH ( jω )|=20 log10|KR|+20 log10|1+ jωz1 |+…+20 log10|1+ jωzm |
+20 log101
¿ ( jω )l∨¿+20 log101
|1+ jωp1 |+…+20 log10
1
|1+ jωpn |¿ (15.10)