Trabajos virtuales
20
Capítulo 11 Principio de los trabajos virtuales En el capítulo anterior se han utilizado ecuaciones vectoriales (Newton-Euler) en las que intervienen magnitudes vectoriales para plantear y resolver el problema dinámico inverso, en el que se debía determi- nar la fuerza necesaria para producir un movimiento CONOCIDO en el sistema y, también, las reacciones entre los eslabones según el tipo de par cinemático que forman. Abandonamos la dinámica de Newton para introducirnos en la dinámica analítica, en la que intervienen las mismas magnitudes vectoriales: fuerzas, mo- mentos, velocidades, pero relacionadas escalarmente mediante ecuaciones basadas en la aplicación principios energéticos. Esta formulación también permite plantear y resolver el problema dinámico inverso, pero está especialmente concebida para resolver el problema dinámico directo, que consiste en obtener la ecuación del movimiento de un sistema mecánico, tal y como se verá en el capítulo siguiente. En este capítulo se introducen los conceptos básicos de desplazamiento virtual y trabajo virtual, y se introduce el principio de los trabajos virtuales, también conocido como axioma fundamental de la mecánica, que exponemos a continuación para resolver problemas de estática y de mecanismos que no se encuentran en equilibrio (utilizando el principio de D’Alambert). Se introducen otras aplicaciones del principio de trabajos virtuales, como la determinación de reacciones aisladas y se introducen los trabajos virtuales generados por fuerzas de tipo conservativo. Finalmente se aplican los conceptos introducidos a la determinación de la ven- taja mecánica de diferentes mecanismos. 11.1. Desplazamiento y trabajo virtual Sea un sistema mecánico de movilidad L =1 constituido por eslabones rígidos unidos formando pares cinemáticos entre los que se limitan las posibilidades de movimiento relativo mediante ligaduras ideales, es decir, ligaduras en las que no se disipa energía. En tal sistema mecánico, la posición de cualquier punto viene definida por su vector de posición respecto al origen del sistema global de coordenadas: − → r p = − → r p (q) que se puede expresar en función de la única coordenada independiente del sistema [q]. Análogamente, la orientación de cualquier sólido en el plano viene definida por el ángulo ϕ que forma con respecto al eje de abcisas del sistema global, que también es función del la variable independiente, como se ha podido comprobar en capítulos anteriores. Para la aplicación de este principio se introduce la definición de desplazamiento virtual de un punto P como una variación en su posición − → r p con las siguientes características: desplazamiento infinitesimal hipotético (ficticio) compatible con las ligaduras del sistema que se produce en un intervalo de tiempo nulo. Por su definición, el operador "‘desplazamiento virtual"’ (δ) se parece casi por completo al operador "‘diferencial"’ d que se aplica un vector de posición, función de las q j coordenadas independientes de un mecanismo mediante la expresión: 1
-
Upload
adrian-navarro-peran -
Category
Documents
-
view
13 -
download
3
description
Teoría de trabajos virtuales para determinar las fuerzas que actúan en un mecanismo.
Transcript of Trabajos virtuales

Capítulo 11
Principio de los trabajos virtuales
En el capítulo anterior se han utilizado ecuaciones vectoriales (Newton-Euler) en las que intervienenmagnitudes vectoriales para plantear y resolver el problema dinámico inverso, en el que se debía determi-nar la fuerza necesaria para producir un movimiento CONOCIDO en el sistema y, también, las reaccionesentre los eslabones según el tipo de par cinemático que forman. Abandonamos la dinámica de Newton paraintroducirnos en la dinámica analítica, en la que intervienen las mismas magnitudes vectoriales: fuerzas, mo-mentos, velocidades, pero relacionadas escalarmente mediante ecuaciones basadas en la aplicación principiosenergéticos. Esta formulación también permite plantear y resolver el problema dinámico inverso, pero estáespecialmente concebida para resolver el problema dinámico directo, que consiste en obtener la ecuación delmovimiento de un sistema mecánico, tal y como se verá en el capítulo siguiente.
En este capítulo se introducen los conceptos básicos de desplazamiento virtual y trabajo virtual, y seintroduce el principio de los trabajos virtuales, también conocido como axioma fundamental de la mecánica,que exponemos a continuación para resolver problemas de estática y de mecanismos que no se encuentran enequilibrio (utilizando el principio de D’Alambert). Se introducen otras aplicaciones del principio de trabajosvirtuales, como la determinación de reacciones aisladas y se introducen los trabajos virtuales generados porfuerzas de tipo conservativo. Finalmente se aplican los conceptos introducidos a la determinación de la ven-taja mecánica de diferentes mecanismos.
11.1. Desplazamiento y trabajo virtual
Sea un sistema mecánico de movilidad L = 1 constituido por eslabones rígidos unidos formando parescinemáticos entre los que se limitan las posibilidades de movimiento relativo mediante ligaduras ideales, esdecir, ligaduras en las que no se disipa energía. En tal sistema mecánico, la posición de cualquier punto vienedefinida por su vector de posición respecto al origen del sistema global de coordenadas: −→r p = −→r p(q) que sepuede expresar en función de la única coordenada independiente del sistema [q]. Análogamente, la orientaciónde cualquier sólido en el plano viene definida por el ángulo ϕ que forma con respecto al eje de abcisas delsistema global, que también es función del la variable independiente, como se ha podido comprobar encapítulos anteriores. Para la aplicación de este principio se introduce la definición de desplazamiento virtualde un punto P como una variación en su posición −→r p con las siguientes características:
desplazamiento infinitesimal
hipotético (ficticio)
compatible con las ligaduras del sistema
que se produce en un intervalo de tiempo nulo.
Por su definición, el operador "‘desplazamiento virtual"’ (δ) se parece casi por completo al operador"‘diferencial"’ d que se aplica un vector de posición, función de las qj coordenadas independientes de unmecanismo mediante la expresión:
1

p p j
d−→r p =L∑
j=1
∂−→r p
∂qj· dq +
∂−→r p
∂t· dt
Siendo la diferencia fundamental, que en el desplazamiento virtual el tiempo permanece constante, por loque se anula el último término:
δ−→r p =L∑
j=1
∂−→r p
∂qj· δq
En mecanismos con un grado de libertad, sólo hay una coordenada independiente y la expresión anteriorqueda:
δ−→r p =d−→r p
dq· δq
Análogamente se define giro virtual de un sólido como una variación en su posición angular que cumplelas condiciones indicadas anteriormente. Se obtiene al aplicar el operador δ al giro del sólido, así:
δ−→θ =
d−→θ
dq· δq
Ejemplo 11.1
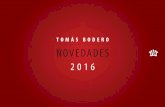
Determine el desplazamiento virtual del punto P sobre la anilla 2 obligada a desplazarse por el interiorde una guía fija de curvatura constante (Figura 11.1). Suponga que la coordenada independiente es ϕ, el girode la anilla respecto al sistema global.
δδ
δx
y
c )b )a )
y
x
δδ
O
P’P
ϕ
P
p
rpp
ϕ
ϕ
pr
r
P
p ϕ
p
p
ϕrp
Figura 11.1: Desplazamiento virtual de una anilla sobre guía curva. Ejemplo 11.1.
El vector de posición de la anilla viene dado por:
−→r p = xp i + yp j
con: xp = R · cosϕ y yp = R · sinϕ. Cuando de introduce un desplazamiento virtual δϕ de la coordenadaindependiente ϕ ( figura 11.1.b), el punto P pasa a la posición P ′ y sufriendo un desplazamiento virtual δ−→r p
que se puede apreciar más claramente en la figura 11.1.c:
δ−→r p(ϕ) =∂−→r p(ϕ)
∂ϕ· δϕ =
∂xϕ
∂ϕi · δϕ +
∂yp
∂ϕ· jδϕ = (−R · sinϕ i + R · cosϕ j) · δϕ
Nótese que el signo de las componentes del desplazamiento virtual lo da, además de las derivada, elsigno de la función trigonométrica correspondiente, según el valor del ángulo. Este resultado es el que se

p y j
obtiene, de forma análoga, proyectando el vector δ−→r p(ϕ) sobre ejes globales, abcisa y ordenada, cuando estevector ha girado su correspondiente desplazamiento virtual δϕ.
Se define Trabajo virtual realizado por la fuerza −→F i como el asociado al desplazamiento virtual de su
punto de aplicación δ−→r pi y se obtiene mediante el producto escalar de esas dos magnitudes vectoriales.
δW = −→F i · δ−→r pi
y el realizado por el par −→M j como el asociado al giro virtual del sólido sobre el que actúa:
δW = −→M j · δ−→θ j
Ejemplo 11. 2
Determine el trabajo virtual total sobre el péndulo simple de longitud l de la figura 11.2 en el que, en elinstante representado forma un ángulo q respecto al eje de absicas del sistema global y se encuentra sometidoa la acción de la gravedad y de un par externo −→
M2
P
qM2
A
Figura 11.2: Determinación de la fuerza generalizada en un péndulo simple. Ejemplo 11.2.
El trabajo virtual total sobre este sistema es el generado por las dos acciones externas citadas:
δW = −→P · δ−→r A + −→
M2 · δ−→q
Trabajo realizado por el peso:
−→P = −P j
−→r A = l · cos q i + l · sin q j
Su desplazamiento virtual:δ−→r A = −l · sin q δq i + l · cos q δq j
y su producto escalar:δWpeso = −P · l · cos q · δq
Trabajo realizado por el par
−→M2 = M2 k
−→q = q k
Su desplazamiento virtual es, directamente δq y su producto escalar:
δWpar = M2 · δq
El trabajo total, sacando factor común δq
δW = [−P · l · cos q + M2] δq

p p j
11.2. Estática y el Principio de los trabajos virtuales
Según el teorema de las fuerzas vivas: el trabajo que realiza un sistema de fuerzas aplicadas sobre unsistema mecánico se traduce en una modificación de su energía cinética. 11.1
δW = dT (11.1)
En el caso de que el sistema se encuentre en equilibrio, caso que ocupa a la estática, su energía cinéticaes nula y la ecuación 11.1 se reduce a:
δW = 0 (11.2)
El principio de los trabajos virtuales establece que si un sistema en el que las ligaduras son idealesse encuentra en equilibrio, la suma de los trabajos virtuales desarrollados por las fuerzas y momentos queactúan sobre él es nula (Ec. 11.3).
δW =∑−→
F i · δ−→rpi +∑−→
M i · δ−→θ i = 0 (11.3)
De la aplicación de este principio se deduce que, en estado de equilibrio, las fuerzas generalizadas sonnulas.
En este tipo de sistemas, las fuerzas de ligadura no contribuyen al trabajo total realizado sobre el sitema,ya sea porque no generan trabajo o porque su contribución neta es nula. Un ejemplo de lo primero es el parcinemático de traslación, en el que la fuerza de reacción va dirigida, precisamente, en la dirección en la queel movimiento del sólido está impedido (Figura 11.3). El el caso de pares superiores ocurre algo similar, yaque la reacción se produce en la dirección de la normal común y el desplazamiento relativo en la direcciónde la tangente común, luego su producto escalar es nulo. En pares inferiores con articulaciones de rotación,el trabajo realizado por una reacción sobre la articulación es igual y opuesto al desarrollado por la reacciónopuesta; el trabajo neto es nulo, aunque no lo sean las contribuciones aisladas de cada reacción.
12
21
21
12δ
���������������������������������������
���������������������������������������
2
F
F
δ1
Figura 11.3: Fuerzas de reacción y desplazamientos virtuales en par de traslación.
dT = −→F 12 · δ−→S 2 + −→
F 21 · δ−→S 1
Resolviendo los productos escalares:
−→F 12 · δ−→S 2 = F12 · δS2 · cos(90) = 0−→F 21 · δ−→S 1 = F21 · δS1 = 0 (δS1 = 0)
Ejemplo 11. 3
Determine el par necesario a aplicar sobre el péndulo de masa m de la figura 11.2 para que éste quedeformando un ángulo q respecto a la horizontal.
Una vez que se ha obtenido el trabajo virtual total que realizan las fuerzas externas sobre el péndulo ysabiendo que se encuentra en equilibrio en esa posición:

y p j
δW = [−P · l · cos q + M2] δq = 0
Luego:M2 = −P · l · cos q
Ejemplo 11. 4
Determine la relación entre el par motor −→M y la fuerza −→
F representadas del mecanismo de colisa dela figura 11.8,considerando que el movimiento de entrada consiste en el giro de la barra 2 y que éste es unmovimiento muy lento, es decir que en cada valor de q el sistema se encuentra en equilibrio bajo la acciónde esas acciones externas.
A
2
4
3
M
qϕ
Figura 11.4: Determinación de la fuerza generalizada en un mecanismo de colisa. Ejemplo 11.4.
El trabajo realizado por las fuerzas externas se obtienen como la suma del realizado por el par y por lafuerza.
δW = −→F · δ−→r P + −→
M · δ−→q
Trabajo realizado por el par −→M = M k
−→q = q k
Su desplazamiento virtual es, directamente δq y su producto escalar:
δWpar = M · δq
Trabajo realizado por la fuerza:
−→F = −F j
−→r A = L4 · cosϕ i + L4 · sin ϕ j
Su desplazamiento virtual, considerando que la variable secundaria ϕ es función de la coordenadaindependiente q y, por tanto:
δ−→r A =d−→r A
dq· δq =
d−→r A
dϕ· dϕ
dq· δq
Siendo dϕdq = Kϕ el coeficiente de velocidad de esa variable secundaria, que obtenemos mediante el
análisis cinemático. En este caso, las funciones de posición son:
r3 · cosϕ − C − L2 · cos q = 0r3 · sin ϕ − L2 · sin q = 0
La matriz jacobiana del sistema, respecto a las variables dependientes:

p p j
[J ] =[
cosϕ −r3 · sin ϕsin ϕ r3 · cosϕ
]
La matriz inversa de la Jacobiana
[J ]−1 =[
cosϕ sin ϕ
− sinϕr3
cos ϕr3
]
Por otro lado, la matriz [Q], derivada de las funciones de posición (cambiada de signo), respecto a lasvariables independientes (q):
[Q] =[ −L2 · cos q
L2 · sin q
]
Obtenemos la matriz de coeficientes de velocidad [K], como [K] = [J ]−1·[Q]. Realizando esta operación,el coeficiente de velocidad que nos interesa,
Kϕ =L2
r3· sin (ϕ − q)
Quedando el desplazamiento virtual, como:
δ−→r A = −L4 · sin ϕ · Kϕ · δq i + L4 · cos q · Kϕ · δq j
y su producto escalar:δWF = −F · L4 · cosϕ · Kϕ · δq
El trabajo total, sacando factor común δq e igualando a cero, por la condición de equilibrio:
δW = [−F · L4 · cosϕ · Kϕ + M ]δq = 0
Luego la relación buscada entre fuerza y par:
F
M=
r3
L4 · cosϕ · L2 · sin (ϕ − q)
11.3. D’Alambert y el principio de trabajos virtuales
En el capítulo Análisis de fuerzas se planteó el principio de D’Alambert y se introdujeron los conceptosde fuerza de inercia y par de inercia. Estos conceptos permiten escribir las ecuaciones del movimeinto de unsólido como si se tratara de ecuaciones de equilibrio, siempre que entre las acciones externas se incluyeran losefectos de inercia. Esta forma de escribir las ecuaciones del movmiento es especialmente útil en la aplicacióndel principio de los trabajos virtuales y se cree que con esta finalidad es con la que D’Alambert introdujola formulación de su conocido principio. De esta forma, considerando la fuerza de inercia y el par de inerciacomo:
−→F in = −m · −→a g−→M ing = −Ig · −→w (11.4)
Las ecuaciones del movimiento quedan (Ec.11.5):
∑−→F + −→
F in = 0∑−→MG + −→
M ing = 0(11.5)

y p p j
Que son las ecuaciones del Principio de D’Alambert y expresan que cuando la resultantes de fuerzas(externas y de reacción) y momentos (externos y de reacción) que actúan sobre un cuerpo no son nulas, elcuerpo se encontrará en equilibrio si en el sistema de fuerzas y momentos actuantes se consideran tambiénlos efectos de inercia.
Una vez introducido el principio de D’Alambert se puede utilizar el principio de trabajos virtuales,también el los casos en que un sistema no se encuentre en reposo o equilibrio estático, al incluir entre lasfuerzas y momentos externos, los efectos de inercia.
δW =∑
i
−→F i · δ−→r pi +
∑i
−→M i · δ−→ϕ i +
∑i
−→Finj · δ−→r gj +
∑j
−→M j · δ−→ϕ j = 0 (11.6)
Esta ecuación (Ec. 11.6) , conocida como ecuación de D’Alambert-Lagrange expresa el principio detrabajos virtuales por el cual la suma de los trabajos efectuados por las fuerzas y pares externos, incluidoslos efectos de inercia, es cero. Se debe prestar atención a que en los sumatorios de las fuerzas y de los paresse consideran sólo los externos y que en el sumatorio de momentos NO hay que considerar los momentos quegeneran las fuerzas externas aplicadas.
En el caso de que no se aplique el principio de D’Alambert, el sistema no se puede considerar en equilibrioy en la ecuación anterior hay que extraer de los sumatorios los efectos de inercia para cada eslabón j :∑−→
F i · δ−→S i +∑−→
M i · δ−→θ i =∑
mj · −→agj · δ−→S gJ +∑
IgJ · −→w · δ−→θj
Así expresado el principio de potencias virtuales queda más claro que el incremento de trabajo querealizan las fuerzas y momentos externos sobre el mecanismo (primer término de la ecuación) se transformaen un incremento en su energía cinética (segundo término).
Aplicamos el principio de los trabajos virtuales con y sin efectos de inercia a la resolución de algunosproblemas.
Ejemplo 11.5
Determine una expresión para el valor de la fuerza Fe necesaria a aplicar sobre el punto A del sólido dela figura para provocar un movimiento que, en el instante dado es −→ag
Fe
g
Figura 11.5: Determinación de la fuerza motriz en sólido en desequilibrio. Ejemplo 11.5.
En este caso el sistema no se encuentra en equilibrio por efecto de la fuerza. Se sabe cuál es su aceleracióny que tiene impedidos dos movimientos: giro y traslación vertical. Utilizando el principio de D’Alambertdebemos obtener el mismo valor para la fuerza que el que se obtuvo en el capítulo de análisis de fuerzas,aplicando las leyes de Newton-Euler. Entonces, actúan la fuerza Fe y la de inercia, de valor: −→F in = −m ·−→a g.La suma de los trabajos virtuales realizados por estas dos fuerzas debe ser nula, siendo sus respectivosdesplazamientos virtuales exactamente iguales a δq, úniva variable del sistema. De modo que:
δW = −→F e · δ−→q + −→
F in · δ−→q = 0
Sustituyendo Fin por su valor y considerando los signos en los productos escalares:
(Fe − m · ag) · δq = 0; Fe = m · ag

p p j
Ejemplo 11.6
Determine la fuerza FA necesaria para que en el mecanismo del la figura 11.6 la corredera 2 ascienda ver-ticalmente a una velocidad −→
V A = 3,8ms j.. Considere los efectos de inercia y obtenga el valor correspondiente
a q = 200 mm. Los datos del análisis cinemático correspondientes a esa posición son:
AB = 0,25 m ; ϕ3 = 306,87o ; q = 115m3 = 0,1 kg ; Ig3 = 0,00054 kgm2 ; −→ϕ 3 = −25,6 k−→a g3 = 272 i m
s2 ; ag3 = −136 ms2 ; −→ϕ 3 = −865,1 k
2
3
B4
FAA
A
F
g gFin
P
2A
B4
3
Min
Figura 11.6: Aplicación del principio de D’Alambert y de los trabajos virtuales al análisis del mecanismo dedoble corredera. Ejemplo 11.6.
En este sistema actúan: La fuerza motriz FA, el peso P de la barra 3 y los efectos de inercia Fin y Min.
El trabajo virtual total del sistema se obtiene sumando las contribuciones de esas acciones externas:
δW = −→F A · δ−→q + −→
P · δ−→r g3 + −→F in · δ−→r g3 + −→
M in · δ−→ϕ 3
O bien:δW = −→
F A · δ−→q + (−→P + −→F in) · δ−→r g3 + −→
M in · δ−→ϕ 3
Evaluamos los trabajos por separado.
1. −→F A · δ−→q . Con: −→
F A = FA j
δ−→q = δq jδWFA = FA · δq
2. δW2 = (−→P + −→F in) · δ−→r g3. Con:
−→P = −P j−→F in = −m · −→a B
2 = m · aB
2 i−→r g3 = L3
2 · cosϕ i + (q + L32 · sin ϕ) j
δ−→r g3 = −L32 · sin ϕ · Kϕ · δq i + (1 + L3
2 · cosϕ · Kϕ) · δq jδW2 = (−m · aB ·L3
4 · sin ϕ · Kϕ) · δq − P · (1 + L32 · cosϕ · Kϕ) · δq
3. δWMin = −→M in · δ−→ϕ . Con: −→
M in = −Ig3 · −→ϕ k−→M in = Ig3 · ϕ k
δ−→ϕ = Kϕ · δq kδWMin = Ig3 · ϕ · Kϕ · δq

El trabajo total:
FA · δq + −m · aB · L3
4· sin ϕ · Kϕ · δq − P · (1 +
L3
2· cosϕ · Kϕ) · δq + Ig3 · ϕ · Kϕ · δq = 0
O bien:
FA =m · aB · L3 · sin ϕ · Kϕ
4− Ig3 · ϕ · Kϕ + P · (1 +
L3
2· cosϕ · Kϕ)
11.4. Determinación de reacciones aisladas
El hecho de que las reacciones no generen trabajo hace que este método sea muy útil para relacionarfuerzas externas o encontrar configuraciones de un sistema para las que se alcanza el equilibrio. Sin embargo,si es posible utilizar el principio de los trabajos virtuales para determinar una reacción concreta utilizando,simultáneamente, el principio de liberación. Para ello se procede de la siguiente forma:
1. La coordenada independiente que define el movimiento en el mecanismo original se mantiene fija:δq = 0.
2. Se introduce un nuevo grado de libertad al sistema qr correspondiente a la fuerza de ligadura que sepretende determinar y que ahora actúa como una nueva fuerza externa (una vez que el sistema defuerzas actuante está completamente determinado).
3. Se introduce un desplazamiento virtual en esa nueva coordenada δqr.
4. Se evalúa el trabajo virtual realizado por las fuerzas que ahora son activas y se aplica el principio delos trabajos virtuales.
Veamos algunos ejemplos.
Ejemplo 11.7
Determine el valor del par de reacción en el mecanismo del ejemplo *.
g
ϕδ
MR
eFA
O
δ rA
δ rg
Figura 11.7: Determinación de la fuerza motriz en sólido en desequilibrio. Ejemplo 11.7.
Para determinar el par de reacción, que impide que el sólido gire respecto al eje k, se libera esa restricción,que se convierte en el movimiento de entrada, se introduce un giro virtual δϕ del sólido en ese eje y se considerael par de reacción como par motor, acción externa a calcular. Esto es posible, porque se supone que la fuerzaFe ya es conocida (o bien, simplemente para establecer una relación entre ellas). Los puntos de aplicaciónde las fuerzas externas: −→F e y −→
F in son, A y G, respectivamente. El principio de trabajos virtuales expresa:
δW = −→F in · δ−→r g3 + −→
F e · δ−→r A + −→MR · δ−→ϕ
Los vectores de posición de esos puntos de aplicación, en función de la nueva coordenada independiente son:

p p j
−→r A = L · cosϕ i + L · sin ϕ j;−→r g = L
2 · cosϕ i + L2 · sin ϕ j;
Sus respectivos desplazamientos virtuales, considerando que el par de reacción aplicado es positivo y que enese mismo sentido se produce el giro virtual δϕ, son:
δ−→r A = −L · sin ϕ · δϕ i + L · cosϕ · δϕ j;δ−→r g3 = −L
2 · sin ϕ · δϕ i + L2 · cosϕ · δϕ j;
Observe que las componentes del giro virtual son, en realidad, negativas. En la obtención del desplaza-miento virtual Como ϕ = π
2 y δϕ es infinitesimal, sin ϕ = 1 y cosϕ = 0. Luego quedan los desplazamientos:
δ−→r A = −L · δϕ i;δ−→r g = −L
2 · δϕ i;
Las fuerzas son: −→F e = m · ag i−→F in = −m · ag i−→MR = MR k
Y el trabajo virtual total:
δW = m · ag · (−L · δϕ) + (−m · ag) · (−L
2· δϕ) + MR · δϕ = 0
Es decir:(−m · L · ag +
m · ag · L2
) · δϕ + MR · δϕ = 0
MR = m · L · ag − m · ag · L2
=m · ag · L
2
11.4.1. Energía potencial de fuerzas conservativas.
En los mecanismos y máquinas es frecuente el uso de elementos capaces de almacenar energía duranteciertas fases de su ciclo cinemático para entregarla en otras fases donde son necesarias, bien para garantizar elcierre de un par cinemático, bien para recuperar una posición inicial una vez que ha cesado la fuerza motriz o,también, para evitar o definir el movimiento del mecanismo configuraciones próximas a una posición singular.En su comportamiento ideal, estos elementos no disipan energía, por lo que las fuerzas que introducen seconocen como fuerzas de tipo conservativo. Son ejemplo de estas fuerzas los resortes y la fuerza de la gravedad.Para toda fuerza conservativa fj existe una función potencial U , tal que:
fj = −−−→∇U j (11.7)
−→∇ = i∂
∂X+ j
∂
∂Y(11.8)
El trabajo virtual realizado por una fuerza conservativa es:
δWj = −−→∇Uj · −→r j = −∂Uj
∂XδX − ∂Uj
∂YδY = −δUj (11.9)
Ahora el principio de los trabajos virtuales, considerando la acción de fuerzas de tipo conservativo queda(Ec. 11.10)
δW =∑
i
−→F i · δ−→r i +
∑i
−→M i · δ−→ϕ i −
∑j
δUj (11.10)
Las funciones potenciales más comunes son:

1. Campo gravitatorio: Ug = m · g · y y su correspondiente trabajo virtual: δWUg = m · g · δy.
2. Fuerza elástica recuperadora de un resorte de rigidez k : Um = k2 · (l − l0)2 y su correspondiente
trabajo virtual: δWUm = k · (l − l0) · δl.Veamos algunos ejemplos de utilización de fuerzas conservativas en la aplicación del principio de los trabajosvirtuales.
Ejemplo 11.8
En el sistema de la Figura el peso P pende del extremo de la barra rígida de longitud L3 = 4C. Estabarra está articulada al bastidor en su extremo y a 3
4 de su longitud queda sujeta mediante un resorte delonditud l que tiene su otro extremo fijo en el bastidor, en las coordenadas (0, 3C). En el instante representadoactúa un par sobre la barra −→
M k. Determinar el ángulo ϕ para el que el sistema se encuentra en equilibrio.Determinar, también, la fuerza en el resorte, para esa configuración, sabiendo que su constante de rigidez esk = 50 N
cm y que: P = 0,4124N ; M = 15 Ncm ; C = 10,5 cm
ϕ3 C
C
ϕ
3 C
A
P
x
3 C
ypϕ
kC
3 CM
s
s
m
hl
Figura 11.8: Determinación de la posición de equilibrio bajo acción de fuerzas conservativas. Ejemplo 11.8.
El trabajo virtual que realizan las fuerzas activas: par externo y fuerzas conservativas: muelle y gravedadse expresa:
δW = −→M · δ−→ϕ − δWUg − δWm = 0
δW = −→M · δ−→ϕ − m · g · δyp − k · (l − l0) · δl
Evaluamos los trabajos por separado.
1. δWM = −→M · δ−→ϕ . Con: −→
M = M k
δ−→ϕ = δϕ kδWM = M · δϕ
2. δWUg = m · g · δyp. Con:
−→r p = 4C · cosϕ i + 4C · sin ϕ j
δ−→r p = −4C · sin ϕ δϕ i + 4C · cosϕ δϕ jδyp = 4C · cosϕ δϕ
δWUg = m · g · 4C · cosϕ δϕ
3. δWUm = k · (l − l0) · δl. Con:
h = 3C · sin ϕm = 3C · cosϕs = 3C − h = 3C · (1 − sin ϕ)l =
√s2 + m2 =
√9C2 · (1 − sin ϕ)2 + 9C2 · cos2 ϕ
l = 3C√
2 − 2 sin ϕδl = −3C · cos ϕ√
2−2·sin ϕ· δϕ
δWUm = k · (l − l0) · δl = 9C2 · k · cosϕ · ( 1√2−2 sin ϕ
− 1)δϕ

p p j
El trabajo total:
M · δϕ − m · g · 4C · cosϕ · δϕ − 9C2 · k · cosϕ · ( 1√2 − 2 sinϕ
− 1) · δϕ = 0
La fuerza generalizada Q = 0, ya que el desplazamiento virtual puede ser cualquiera:
M − m · g · 4C · cosϕ − 9C2 · k · cosϕ · ( 1√2 − 2 sinϕ
− 1) = 0
El ángulo para la posición de equilibrio se obtiene mediante proceso iterativo: ϕ = 30o La fuerza delresorte en la posición de equilibrio: Fmuelle = k · (s− s0) = 0. Es decir, resulta que para el peso dado, el pary las distancias consideradas, el par compensa al peso y el muelle se encuentra extendido una longitud iguala la de su longitud inicial.
11.5. Potencias virtuales
El trabajo desarrollado por una fuerza en la unidad de tiempo es la potencia que está ejerciendo esafuerza. Así, podemos obtener la ecuación del principio de potencias virtuales derivando la ecuación (ec.??)respecto al tiempo:
dW
dt=
∑−→F i · δ−→S i
dt+
∑−→M i · δ−→θ i
dt= 0 (11.11)
En esta ecuación, las fuerzas y momentos aplicados son constantes (lo son en el intervalo que dura eldesplazamiento virtual -tiempo cero-), entonces las derivadas temporales son la del desplazamiento virtualδ−→S i
dt que corresponde a la velocidad lineal instantánea del punto de aplicación de la fuerza considerada y la
del giro virtual δ−→θ i
dt que corresponde a la velocidad angular instantánea del sólido en el que está aplicado elmomento. De modo que la ecuación (ec.11.11) queda:
P =∑−→
F i · −→v i +∑−→
M i · −→w i = 0 (11.12)
Esta es una ecuación escalar muy fácil de resolver y es muy útil para resolver problemas en los que sebusca determinar la acción motora que está produciendo el movimiento dado del mecanismo y para resolverproblemas de ventaja mecánica, que se comentarán a continuación.
Tal y como se ha planteado la ecuación (Ec. 11.12), en los sumatorios deben estar incluidos los efectosde inercia. Cuando no se aplica el principio de D’Alambert, la ecuación del principio de potencias virtualesse expresará como:
P =∑−→
F i · −→v i +∑−→
M i · −→w i =∑
mj · −→agj · −→v gj +∑
Igj · −→wj · −→w j (11.13)
Las ecuaciones (11.12 y 11.13) consideran los productos escalares de vectores: Fuerza por velocidad yPar por velocidad angular. El producto escalar de estas segundas magnitudes es muy sencillo de realizar, yaque ambas llevan la misma dirección (eje k) y por tanto el producto escalar será el producto de sus módulos,con signo positivo si ambas llevan el mismo sentido (cos 0 = 1) o negativo (cos 180 = −1) en caso contrario.Sin embargo, para obtener el producto escalar entre fuerza y velocidad, será necesario conocer el ángulo queforman estos dos vectores, o utilizar sus componentes en vectores unitarios.
Veamos la aplicación del principio de potencias virtuales a unos ejemplos:
Ejemplo 11.9
En el mecanismo representado en la Figura 11.9, el eslabón 2 gira alrededor de su articulación fija O2
con una velocidad angular −→w 2 = −5 k radseg y aceleración angular −→
w 2 = −200 k radseg2 . Su momento de inercia

respecto a un eje que pasa por su centro de gravedad es Ig = 0,0212 kg · m2 y su peso −→P = 44,5 N. Para
los datos que se dan, determinar la Fuerza −→F que se debe ejercer sobre el centro del extremo superior para
producir la velocidad y aceleración angulares dadas considerando, además de los efectos de inercia, el pesodel eslabón.
����������������
g
2O33
0
235
F
ϕ
θ
Figura 11.9: Mecanismo para ejemplo 11.9
Aplicando el Principio de potencias virtuales:∑
P = 0.(considerando los efectos de inercia)
Potencias generadas por las acciones externas:
−→M in · −→w + −→
F · −→V A + −→Fin · −→V g + −→
P · −→V g = 0;
Los vectores de esta ecuación son:
Par de inercia:
−→M in2 = −Ig · −→w = 4,24 k
Velocidad angular:
−→w = −5 k
Fuerza −→F :
−→F = F · (cos 5 i + sin 5 j)
La velocidad del centro del punto A donde está aplicada la fuerza −→F :
−→V A = −→w ×−→
OA = −wk × OA · (cosϕ i + sin ϕ j) = w · OA · (sin ϕ i − cosϕ j)
Resolviendo para los datos del enunciado:
−→V A = 2,45 i − 1,41 j
Fuerza de inercia −→F in:
−→F in = −4,54 · (37,76i − 28,59j) = −171,46i + 129,82j

p p j
La velocidad del centro de gravedad obtenida en el ejemplo 6.2:
−→V g = −→w ×−−→
OG = −wk × OG · (cos ϕ i + sin ϕ j) = w · OG · (sin ϕ i − cosϕ j)
Resolviendo para los datos del enunciado:
−→V g = 1,017 i− 0,587 j
Y el peso:
−→P = −44,5 j
los productos escalares:⎧⎪⎪⎨⎪⎪⎩
−→M in · −→w 2 = (4,24 k) · (−5 k) = −21,2−→
F · −→V A = F · (cos 5 i + sin 5 j) · (2,45 i− 1,41 j) = 2,32 · F−→Fin · −→V g = (−171,46i + 129,82j) · (1,017 i − 0,587 j) = −250,58−→
P · −→V g = (1,017 i − 0,587 j) · (−44,5 j) = 26,12
Sumando todas las potencias e igualando a cero:
−21,2 + 2,32 · F − 250,58 + 26,12 = 0
de donde obtenemos:
F = 105,88 N
11.6. Ventaja Mecánica.
Una de las funciones esenciales para la que se diseñan los mecanismos es para transmitir una fuerza oun par desde el eslabón de entrada al eslabón de salida obteniendo una ganancia en el proceso. La relaciónentre los módulos de la fuerza o par de salida y la fuerza o par de entrada se conoce como ventaja mecánicadel mecanismo (ec. 11.14).
V.M. =Fsalida
Fentrada(11.14)
Si suponemos que el mecanismo es un sistema conservativo (no se disipa energía por efectos de rozamien-to, calor, etc), y que los movimientos de sus eslabones son lo suficientemente lentos como para despreciarlos efectos de inercia, entonces la potencia entregada al sistema debe ser igual a la potencia absorbida en eltrabajo útil que esté realizando. Bajo las consideraciones efectuadas, el principio de potencias virtuales, quees aplicable a cualquier mecanismo en cualquier condición, puede simplificarse con la expresión (ec. 11.15).
Pentrada = Psalida (11.15)
Entendemos que para calcular la ventaja mecánica de un mecanismo es aconsejable utlilizar la ecuación(ec. 11.14) ya que la (ec. 11.15) exige un elevado grado de comprensión del problema, sobre todo de cuáles la potencia absorbida. En cualquier caso debe quedar claro que en la ecuación de igualdad de potenciasaparecen las magnitudes: fuerza o momento aplicado y absorbido multiplicados por una velocidad lineal ouna velocidad angular respectivamente, por tanto la relación entre esas magnitudes en la salida y la entra-da dependerá exclusivamente de una relación entre velocidades. En el capítulo de Centros instantáneos derotación se introdujo el teorema de relación entre velocidades angulares y se expuso que esa relación dependeexclusivamente de la geometría del problema; en particular, de las distancias de los centros instantáneos ab-solutos de los eslabones que intervienen al centro instantáneo común. Por lo tanto, la ventaja mecánica de unmecanismo depende sólo de la posición de sus eslabones en el momento considerado. Veamos la equivalenciaentre aplicar el principio de potencias virtuales y la ecuación de igualdad de potencias en la obtención de laventaja mecánica.

j
Ejemplo 11.10
En el mecanismo cuadrilátero articulado en posición abierta de la figura 11.10 al eslabón 2 de entradadel movimiento se le aplica un par −→
M2 en el sentido indicado. Determinar el par de salida en el eslabón 4 yla ventaja mecánica del mecanismo. Se consideran despreciables los efectos de inercia
M4W4
11
1
1 1
2
3
3
3
34
4422
2
M
W2
2
4
������������
Figura 11.10: Cuadrilátero articulado 11.10
El par aplicado −→M2 hace girar al eslabón 2 en sentido antihorario. Se puede observar claramente en la
figura que, en esta posición, el eslabón 4 deberá girar en el mismo sentido. Esto se puede confirmar viendoque el centro común a los eslabones 2 y 4 (centro 24) cae fuera de la línea que une al 12 con el 14.
Lo más interesante de este ejemplo es observar que la potencia entregada en 2 debe ser absorbida por“algo” conectado al 4, que dificulte su movimiento, entonces el par −→
M4 ha de ser opuesto a la velocidadangular de ese eslabón y por tanto la potencia calculada como producto escalar −→
M4 · −→w 4 debe ser negativa(potencia absorbida). Obsérvese también que si −→M4 fuera en el sentido de −→w 4 estaría entregando energíaal mecanismo al igual que −→
M2; no puede ocurrir que todas las fuerzas externas estén entregando energía,ninguna la absorba y el sistema esté en equilibrio. En un sistema así, el principio de potencias virtuales daríaque un par debe llevar el sentido opuesto al otro.
Aplicando el principio de potencias virtuales a nuestro ejemplo:
−→M2 · −→W 2 + −→
M4 · −→W 4 = 0;
donde: ⎧⎪⎪⎨⎪⎪⎩
−→M2 = (+)−→W 2 = (+)−→W 4 = (+)−→M4 = (−)
Haciendo los productos escalares:
M2 · W2 − M4 · W4 = 0; M4 = M2 · W2
W4
y aplicando el teorema de relación entre velocidades angulares:
W2
W4=
14 − 2412 − 24
Entonces el par M4 que se pedía en el enunciado es:

p p j
M4 = M2 · 14 − 2412 − 24
y la ventaja mecánica:
M4
M2=
14 − 2412 − 24
Que como se puede observar, depende sólo de la posición de los eslabones.
Ahora apliquemos la ecuación de igualdad de potencias (ec.11.15) para determinar la ventaja mecánica:
Pe = Ps; M2 · W2 = M4 · W4; M4 = M2 · W2
W4
que es la misma relación que habíamos obtenido aplicando el principio de potencias virtuales.
Ejemplo 11.11
En el mecanismo cuadrilátero articulado en cerrada de la figura 11.11 al eslabón 2 de entrada delmovimiento se le aplica un par −→
M2 en el sentido indicado. Determinar el par de salida en el eslabón 4 y laventaja mecánica del mecanismo.
1412
32
34
42
13
M2W2
M4 W4
1
4
1
2
3
������������
����
Figura 11.11: Cuadrilátero articulado ejemplo 11.11
En este caso el centro 24 cae entre los centros 12 y 14 luego la relación entre velocidades angularesw4w2
será negativa. La velocidad angular del eslabón 2 es positiva ( sentido antihorario) y la del eslabón 4negativa. De nuevo, el eslabón de salida debe absorber la energía de entrada y por eso el par −→
M4 debe serpositivo, llevando el sentido opuesto a −→w 4. Aplicando el principio de potencias virtuales:
−→M2 · −→W 2 + −→
M4 · −→W 4 = 0;
donde: ⎧⎪⎪⎨⎪⎪⎩
−→M2 = (+)−→W 2 = (+)−→W 4 = (−)−→M4 = (+)
Haciendo los productos escalares:
M2 · W2 − M4 · W4 = 0; M4 = M2 · W2
W4
y aplicando el teorema de relación entre velocidades angulares (en módulos, ya que vectorialmente hemosvisto que serían negativa. El hecho de esta relación sea negativa ya se ha considerado al definir los signos enlos productos escalares):

j
W2
W4=
14 − 2412 − 24
Entonces el par M4 que es:
M4 = M2 · 14 − 2412 − 24
y la ventaja mecánica:
M4
M2=
14 − 2412 − 24
Obtenemos un resultado similar al anterior; lo que sí cambiará será su valor ya que los centros hancambiado de posición.
Ahora apliquemos la ecuación de igualdad de potencias (ec.11.15) para determinar la ventaja mecánica:
Pe = Ps; M2 · W2 = M4 · W4; M4 = M2 · W2
W4
que es la misma relación que habíamos obtenido aplicando el principio de potencias virtuales.
Ejemplo 11.12
El mecanismo de la figura 11.12 consta de una leva con seguidor de rotación. En este mecanismo, laleva gira en sentido antihorario merced al par motor −→
M aplicado y está en contacto permanente con elrodillo 3 mediante un par de rodadura pura. El cierre de fuerza impuesto por el muelle garantiza el contactopermantente. En la posición representada, el muelle está ejerciendo una fuerza de −→
F = 100 N sobre elseguidor, opuesta al sentido en el que éste se desplaza. Determinar la ventaja mecánica F
M del mecanismoen la posición indicada.
Aplicando el principio de potencias virtuales a las fuerzas activas que actúan sobre el mecanismo:
−→F · −→V 5 + −→
M · −→w 2 = 0
Si el momento y la velocidad angular tienen el mismo sentido k positivo, entonces el desplazamiento delseguidor es positivo, en dirección vertical, mientras que la fuerza que ejerce el resorte es en sentido opuesto,de forma que podemos poner:
M · w = F · V5
Y el par motor:
M = F · V5
w
Podemos utilizar el centro instantáneo de rotación común a los sólidos en los que están aplicadas lasacciones externas (2 y 5), para relacionar sus velocidades, considerando que la velocidad de ese punto es, pordefinición, la misma como perteneciente a uno y otro sólidos:
−→V 25∈5 = −→
V 25∈2
Con: −→V 25∈5 = V5−→V 25∈2 = w2 · 12 − 25

p p j
Figura 11.12: Ventaja mecánica, ejemplo: 11.12
Igualando las expresiones anteriores:
V5 = w · 12 − 25 ⇒ V5
w= 12 − 25
La distancia 12 − 25 = 2 cm se mide sobre el dibujo, en el que previamente han sido localizados esoscentros.
El par necesario es:
M = 100 · 2 = 200 N · cm
Ejemplo 11.13
En el mecanismo de leva con seguidor de cara plana de la figura 11.13 es accionado por la corredera 4que se desplaza hacia la izquierda por efecto de la fuerza motriz −→
F e. Determine los CIR del mecanismo y suventaja mecánica, cuando la fuerza de salida se obtiene sobre el eslabón 5.
Los centros se muestran sobre la figura.
Aplicando el principio de potencias virtuales a las fuerzas activas que actúan sobre el mecanismo:
−→F e · −→V 4 + −→
F 5 · −→V 5 = 0
La potencia generada por la fuerza −→F e es entregada al sistema (+) y la que se realiza sobre el eslabón
5 es −, es decir, absorbida. Ambas potencias son iguales:
Fe · V4 = Fs · V5 ;⇒ Fs
Fe=
V4
V5
En este caso no se puede utilizar el centro instantáneo de rotación común a los sólidos 4 y 5 pararelacionar sus velocidades, ya que ambos sólidos tienen movimiento de traslación puro y, por tanto, noexiste el centro común. Tenemos que relacionar sus velocidades de otra forma. Aprovechando la condiciónde traslación pura, escribimos: −→
V 34∈4 = V4−→V 34∈3 = w3 · 13 − 34−→V 35∈5 = V5−→V 35∈3 = w3 · 13 − 35

j
Figura 11.13: Ventaja mecánica, ejemplo: 11.13
Luego, a través del sólido 3 encontramos:
V4
V5=
w3 · 13 − 34w3 · 13 − 35
=13 − 3413 − 35
Las distancias se obtienen midiendo sobre la figura y la ventaja mecánica resulta:
Fs
Fe=
4,33,6
= 1,2
Ejemplo 11.14
Obtener la ventaja mecánica del mecanismo representado en la figura 11.14 en el que los dos sólidospresentan movimientos de traslación pura respecto a ejes perpendiculares. El movimiento de entrada seintroduce sobre el eslabón 2.
Figura 11.14: Ventaja mecánica, ejemplo: 11.14
Aplicamos el principio de potencias virtuales:
−→F 2 · −→V 2 + −→
F 3 · −→V 3 = 0

p p j
Cuando el sólido 2 asciende verticalmente empuja al 3 que se ha de mover en dirección horizontal.
Como los dos sólidos tienen movimiento de traslación pura, el centro común no existe y, en este caso,no hay ningún otro eslabón que se pueda utilizar para relacionar las velocidades de 2 y 3. Sin embargo,podemos utilizar cualquier otro método de análisis cinemático para relacionar la velocidad de entrada conla de salida. La ecuación de velocidades relativas expresa:
−→V 3 = −→
V 2 + −→V 32
Asignando cualquier valor a V2, a partir del polo de velocidades, trazamos este vector en sentido verticalpositivo. Seguidamente trazamos, también por el polo, la dirección de la velocidad absoluta de 3: V3. A partirdel extremo de la velocidad de 2 trazamos la dirección de la velocidad relativa V32 (la tangente a los dosperfiles) que corta a la dirección de V3 en el punto que cierra el polígono y permite obtener el módulo V3
(figura 11.15.
V2
3V
a
Figura 11.15: Ventaja mecánica, ejemplo: 11.14
Queda claro, del polígono, que la potencia sobre el eslabón 3 es negativa y que la relación entre veloci-dades es la tangente del ángulo α, por tanto, la ventaja mecánica es:
F3
F2= tan α